Mechatronika - Technische Universität Chemnitz · człowiekowi jest niemal tak stara jak sama...
10
Mechatronika Modu 10: Robotyka podrczniki, (pomys) Petr Blecha Zdenk Kolíbal Radek Knoflíek Aleš Pochylý Tomáš Kubela Radim Blecha Tomáš Bezina Uniwersytet Technologiczny w Brnie Wydzia Mechaniczny Instytut Maszyn Produkcyjnych, Systemów i Robotyki Europejski Projekt transferu innowacji dla dodatkowej kwalifikacji Mechatronika dla specjalistów w zglobalizowanej produkcji przemysowej. UE-Projekt Nr. DE/08/LLP-LdV/TOI/147110 "MINOS + +", okres od 2008 do 2010 r. Ten projekt zosta zrealizowany przy wsparciu finansowym Komisji Europejskiej. Projekt lub publikacja odzwierciedlaj jedynie stanowisko ich autora i Komisja Europejska nie ponosi odpowiedzialnoci za umieszczon w nich zawarto www.minos-mechatronic.eu
Transcript of Mechatronika - Technische Universität Chemnitz · człowiekowi jest niemal tak stara jak sama...

Mechatronika Modu� 10: Robotyka podr�czniki, (pomys�) Petr Blecha Zden�k Kolíbal Radek Knoflí�ek Aleš Pochylý Tomáš Kubela Radim Blecha Tomáš B�ezina Uniwersytet Technologiczny w Brnie Wydzia� Mechaniczny Instytut Maszyn Produkcyjnych, Systemów i Robotyki Europejski Projekt transferu innowacji dla dodatkowej kwalifikacji Mechatronika dla specjalistów w zglobalizowanej produkcji przemys�owej. UE-Projekt Nr. DE/08/LLP-LdV/TOI/147110 "MINOS + +", okres od 2008 do 2010 r. Ten projekt zosta� zrealizowany przy wsparciu finansowym Komisji Europejskiej. Projekt lub publikacja odzwierciedlaj� jedynie stanowisko ich autora i Komisja Europejska nie ponosi odpowiedzialno�ci za umieszczon� w nich zawarto�� www.minos-mechatronic.eu

Partners for the creation, evaluation and dissemination of the MINOS and the MINOS** project.
- Chemnitz University of Technology, Institute for Machine Tools and Production Processes, Germany
- np – neugebauer und partner OhG, Germany - Henschke Consulting, Germany - Corvinus University of Budapest, Hungary - Wroclaw University of Technology, Poland - IMH, Machine Tool Institute, Spain - Brno University of Technology, Czech Republic - CICmargune, Spain - University of Naples Federico II, Italy - Unis a.s. company, Czech Republic - Blumenbecker Prag s.r.o., Czech Republic - Tower Automotive Sud S.r.l., Italy - Bildungs-Werkstatt Chemnitz gGmbH, Germany - Verbundinitiative Maschinenbau Sachsen VEMAS, Germany - Euroregionala IHK, Poland - Korff Isomatic sp.z.o.o. Wroclaw, Polen - Euroregionale Industrie- und Handelskammer Jelenia Gora, Poland - Dunaferr Metallwerke Dunajvaros, Hungary - Knorr-Bremse Kft. Kecskemet, Hungary - Nationales Institut für berufliche Bildung Budapest, Hungary - Christian Stöhr Unternehmensberatung, Germany - Universität Stockholm, Institut für Soziologie, Sweden
Zawartość Szkolenia Minos: moduły 1 – 8 (podręczniki, ćwiczenia i rozwiązania do ćwiczeń dla): Podstawy/ Kompetencje międzykulturowe, zarządzenie projektem/ Fluidyka / Napędy Elektryczne i Sterowanie / Elementy Mechatroniki/ Systemy i Funkcje Mechatroniki/ Logistyka, Teleserwis, Bezpieczeństwo/ Zdalne Zarządzanie, Diagnostyka Minos **: moduły 9 – 12 (podręczniki, ćwiczenia i rozwiązania do ćwiczeń dla): Szybkie Prototypowanie / Robotyka/ Migracja/ Interfejsy Wszystkie moduły dostępne są w następujących językach: Polski, Angielski, Hiszpański, Włoski, Czeski, Węgierski i Niemiecki W celu uzyskania dodatkowych informacji proszę się skontaktować z Chemnitz University of Technology Dr.-Ing. Andreas Hirsch Reichenhainer Straße 70, 09107 Chemnitz phone: + 49(0)371 531-23500 fax: + 49(0)371 531-23509 e-mail: [email protected] www.tu-chemnitz.de/mb/WerkzMasch or www.minos-mechatronic.eu

1. HISTORIA, ROZWÓJ I ZNACZENIE ROBOTÓW .................................................. 5 1.1. OD MECHANICZNYCH SKRYBÓW DO ROBOTÓW ............................ 5
1.2. DEFINICJA ROBOTÓW ............................................................................. 8
2. STRUKTURA ROBOTÓW PRZEMYSŁOWYCH I MANIPULATORÓW (RPiM) 10 2.1. STRUKTURA KINEMATYCZNA RPiM ................................................. 10
2.1.1. System ruchu stacjonarnych RPiM .................................................................... 10 2.1.2. Pary kinematyczne w budowie RPiM ................................................................ 11 2.1.3. Roboty przemysłowe z kinematyką szeregową ................................................. 12 2.1.4. Problematyka dokładności i pozycjonowania podstawowych typów RPiM ..... 17 2.1.5. Roboty przemysłowe o kinematyce równoległej ............................................... 19 2.1.6. Pojazdy AGV (Automated Guided Vehicle – zautomatyzowany pojazd kierowany) ........................................................................................................................ 20
2.2. PRZYKŁADY TYPOWYCH PRZEDSTAWICIELI RPiM Z PUNKTU WIDZENIA KONSTRUKCJI ............................................................................. 21
2.2.1. Podstawowe typy robotów przemysłowych ....................................................... 21 2.2.2. Typy pochodne robotów przemysłowych .......................................................... 23 2.2.3. Typy RPiM powstałe z pochodnych konfiguracji par kinematycznych ............ 26
3. EFEKTOR ...................................................................................................................... 28 3.1. Zastosowanie i podział efektorów ............................................................... 28
3.2. Efektory techniczne ..................................................................................... 28
3.3. Efektory manipulacyjne – chwytaki............................................................ 29
3.3.1. Efektory o łączonych funkcjach ......................................................................... 38 3.3.2. Efektory specjalne .............................................................................................. 39 3.3.3. Siły działające na chwytane obiekty podczas ruchu robota ............................... 39 3.3.4. Automatyczna wymiana efektorów .................................................................... 43
3.4. URZĄDZENIA PERYFERYJNE RPiM .................................................... 45
3.4.1. Wprowadzenie, klasyfikacja, cel użycia ............................................................ 45 3.4.2. Klasyfikacja UP ze względu na ich funkcję ....................................................... 46 3.4.3. Klasyfikacja UP ze względu na charakterystyczne cechy konstrukcyjne. ......... 46 3.4.4. Klasyfikacja UP ze względu na ich położenie na stanowisku zrobotyzowanym52
4. Stanowisko zrobotyzowane ............................................................................................ 54 4.1. Podstawowe składniki stanowiska zrobotyzowanego ................................ 56
4.2. Sterowanie pracą stanowiska ...................................................................... 58
4.3. Rodzaje stanowisk zrobotyzowanych ......................................................... 60
4.3.1. Spawanie i zgrzewanie ....................................................................................... 60 4.3.2. Przenoszenie (manipulowanie) .......................................................................... 64 4.3.3. Nanoszenie powłok ............................................................................................ 66 4.3.4. Operacje technologiczne .................................................................................... 68
5. Programowanie robotów przemysłowych .................................................................... 72 5.1. Wprowadzenie ............................................................................................. 72
5.2. Programowanie on-line ............................................................................... 72

5.2.1. Interfejs użytkownika – panel sterowania/programator ..................................... 73 5.2.2. Robot przemysłowy o 6 stopniach swobody (DOF) .......................................... 75 5.2.3. Główny typy ruchów robota ............................................................................... 78 5.2.4. Przybliżenie ruchu .............................................................................................. 80 5.2.5. Przegląd instrukcji języka programowania robotów ABB ................................. 82 5.2.6. Przegląd instrukcji języka programowani robotów KUKA ............................... 83 5.2.7. Studium przypadku: Zadanie paletyzacji ........................................................... 84
5.3. Programowanie off-line .............................................................................. 89
6. Bezpieczeństwo stanowisk zrobotyzowanych .............................................................. 91 6.1. Podstawowe pojęcia i definicje ................................................................... 92
6.2. Wymagania bezpieczeństwa w budowie robotów ...................................... 93
6.2.1. Elementy układu napędowego ........................................................................... 93 6.2.2. Przerwa lub fluktuacje źródeł zasilania .............................................................. 93 6.2.3. Źródło zasilania .................................................................................................. 93 6.2.4. Energia skumulowana ........................................................................................ 94 6.2.5. Kompatybilność elektromagnetyczna (EMC) .................................................... 94 6.2.6. Wyposażenie elektryczne ................................................................................... 94 6.2.7. Urządzenia sterujące .......................................................................................... 94
6.3. Wymagania dla elementów układu sterowania odpowiedzialnych za bezpieczeństwo .................................................................................................... 94
6.3.1. Funkcja wyłączenia awaryjnego ........................................................................ 95 6.3.2. Wyłącznik bezpieczeństwa ................................................................................ 95 6.3.3. Zmniejszenie prędkości ...................................................................................... 96 6.3.4. Tryby pracy ........................................................................................................ 96 6.3.5. Sterowanie z wykorzystaniem ręcznego panelu sterowania .............................. 96 6.3.6. Wymagania w zakresie wspólnego działania robotów ...................................... 97
6.4. Opis kategorii urządzeń odpowiedzialnych za bezpieczeństwo ................. 97
6.4.1. Kategoria B ........................................................................................................ 97 6.4.2. Kategoria 1 ......................................................................................................... 98 6.4.3. Kategoria 2 ......................................................................................................... 99 6.4.4. Kategoria 3 ....................................................................................................... 100 6.4.5. Kategoria 4 ....................................................................................................... 100
6.5. Urządzenia systemów bezpieczeństwa ..................................................... 101
6.5.1. Przycisk stopu awaryjnego ............................................................................... 101 6.5.2. Kurtyny świetlne .............................................................................................. 102 6.5.3. Skaner laserowy ............................................................................................... 104 6.5.4. Bariery stałe ...................................................................................................... 105 6.5.5. Zamki bezpieczeństwa ..................................................................................... 105 6.5.6. Maty bezpieczeństwa ....................................................................................... 106
6.6. Przykład zabezpieczenia stanowiska zrobotyzowanego ........................... 107

1. HISTORIA, ROZWÓJ I ZNACZENIE ROBOTÓW 1.1. OD MECHANICZNYCH SKRYBÓW DO ROBOTÓW Skłonność do angażowania humanoidów lub maszyn przypominających organizmy żywe w służbę człowiekowi jest niemal tak stara jak sama ludzka kultura. Historia konstruowania ruchomych figurek sięga starożytnego okresu bizantyjskiego. Już w Iliadzie Homera wspomniane jest, że Hefajstos, jeden z olimpijskich bogów, zatrudnił w swoim domu pokojówki wykute ze szczerego złota. W 400-365 r. p. n. e. Archytas stworzył drewniany model pingwina. Mówiono, że w miejscu wnętrzności pingwina umieszczony został mały balon. Heron z Aleksandrii, znany mechanik i budowniczy figurek napędzanych parą wodną1 i siłą pochodzącą z rozszerzalności cieplnej pewnych substancji, np. rtęci, konstruktor zautomatyzowanych elementów sceny, mechanizmów otwierających drzwi świątyni itp. używał do sterowania pary wodnej i rozgrzanego powietrza. Jako przykład jego dokonań może posłużyć aparatura umieszczona w ołtarzu, przedstawiona na Rys. 1-1. Gdy na ołtarzu rozpalony jest ogień, woda w misce (A) podgrzewa się, a uciekająca para wodna wywiera ciśnienie na powierzchnie wody w niższej części ołtarza zaprojektowanej jako rezerwuar. Woda jest wypychana do góry poprzez rury (L) do naczyń trzymanych przez statuy. Po tym jak naczynia się wypełnią, ramiona się przechylają i woda gasi ogień na ołtarzu.
a b c
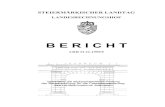
Rys. 1-1: Przykłady historycznych automatów
a. Przykład starożytnego ołtarza z figurami automatycznie lejących wodę na święty ogień b. Mechaniczny automat Jacquete Droze´a c. Mechaniczny automat Hosokawa´y Wielkiego artysty i technika Leonarda da Vinci (1452-1519) również nie zabrakło w historii automatów. By przywitać króla Ludwika XII w Mediolanie, skonstruował mechanicznego lwa, który podszedł do królewskiego tronu i pozdrowił go unosząc łapę. Bardziej wyjątkowe mechaniczne konstrukcje sztucznych ludzi, powstałe w 18-stym wieku związane są z biorobotyką. Mniej więcej w 1738 r., francuski mechanik Jacques de Vaucanson skonstruował praktycznie działającego robota – flecistę zdolnego zagrać 12 utworów muzycznych. Robot ten generował dźwięki wydmuchując powietrze przez usta do głównego otworu fletu i zmieniał ich tony umieszczając palce nad pozostałymi otworami instrumentu. W 1772 r., Jacquet Droz skonstruował automat w kształcie dziecka (zob. Rys. 1-1b) poruszany krzywkami i napędzany sprężynami był w stanie pisać fragmenty tekstu używając prawdziwego pióra. W 1796 r. inny dobrze znany automat, chłopiec niosący herbatę (zob. Rys. 1-1c), został skonstruowany przez Hosokawę z Japonii.
1 Patrz znany eksperyment fizyczny „Bania Herona“

Wielki przełom w dziedzinie nauk przyrodniczych dostarczył konstruktorom automatów bardziej zaawansowane środki. Wiedza z dziedziny akustyki umożliwiła konstrukcje mechanizmów emitujących proste dźwięki, na przykład automatycznych instrumentów muzycznych i mówiących figurek. W czasie po I Wojnie Światowej, roboty nie mogły zostać pominięte na jakiejkolwiek lepszej wystawie technologicznej. Przyjmowały kształt zbroi, ruszały rękami i odpowiadały na proste pytania głosem odtworzonym z płyty gramofonowej. Roboty uzyskały napęd elektryczny, który mógł być obsługiwany sprawniej niż dźwignie, krzywki i sprężyny. Na przykład robot TELEVOX, zbudowany w 1927 r. przez Brita R. J. Wensly był w stanie odebrać telefon, gdy dzwonił i odpowiedzieć ludzkim głosem. Amerykanin Whitman stworzył „radio-człowieka“ OCCULTA. Był przeznaczony na cele militarne, dokładnie do niszczenia barykad i przejmowania pewnych blokad wojskowych. Słowo „robot“ pochodzi od staro-słowiańskiego rdzenia „-rob-“, który również można znaleźć w czeskich słowach: „robota“, oznaczające ciężką, obowiązkową i męczącą pracę, „robit” (pracować), ale również w słowie “výroba” (produkcja, manufaktura), “obrábět” (pracować, maszyna, narzędzie), itd. Genialny czeski pisarz Karel Čapek użył słowa „robot“ do nazwania sztucznie stworzonych istnień w jego sztuce „R.U.R.“ z 1920 r. Skrót „R.U.R.“ oznacza „Rozum’s Universal Robots“, co w wolnym tłumaczeniu miało oznaczać „Uniwersalne roboty pana Rozuma“. W rzeczywistości Karel Čapek chciał nazwać jego Roboty „Laborami“ (oczywiście celując w łacińskie słowo „labore“, ewentualnie angielskie słowo “labour” - twarda, lub przynajmniej w pełni zajmująca praca) i to jego brat, malarz Josef Čapek doradził mu by użyć słowa „robot“. Tak, czy inaczej, jest faktem, że od 1921 r., kiedy sztuka „R.U.R“ została wystawiona po raz pierwszy, szybko stała się popularna na całym świecie a razem z nią czeskie słowo „robot“. Dla przykładu można podać, że w Japonii, o czeskim pochodzeniu słowa „robot“, dzieci są uczone w szkołach. Od tamtego czasu to słowo jest powszechnie używane do określania wielu urządzeń automatycznych bądź mechanicznych od przetwórstwa spożywczego, do automatycznych pilotów. Niechybnie było ono również używane w przypadkach występujących wielokrotnie w historii, w stosunku do sztucznych konstrukcji - „androidów“ - naśladujących ludzi przede wszystkim w sensie mechanicznym. Powinno zostać zaznaczone, że taki sens był Karelowi Čapkowi obcy. Jego koncepcja „Robotów“ była ściśle biochemiczna. Tym niemniej klasyfikujemy roboty jako nieożywione maszyny, dlatego też odmieniamy to słowo zgodnie z odmianą przedmiotów martwych. W przemysłowej produkcji masowej jednakże, nie wszystkie maszyny szeroko zatrudniane do zadań wykonywanych normalnie przez ludzi nazywane są robotami. W niektórych przypadkach używa się słowa automat. Jest tak, ponieważ automaty, w kwestii ich wyglądu bardzo mało przypominają ludzi i ich funkcje są wysoko wyspecjalizowane (sterowniki automatyczne, manipulatory jednofunkcyjne).
Rys. 1-3 przedstawia historyczny rozwój produkcji przemysłowych maszyn i robotów. Pomimo, że rozwój historyczny przemysłowych maszyn rozpoczął się znacznie wcześniej, przełom XV w. i XVI w. jest tutaj przyjęty jako okres początkowy. Można zaobserwować zarówno rzeczywisty rozwój maszyn przemysłowych, wliczając w to ich stopniowe ulepszanie i mechanizacje, jak i rozwój koncepcji sztucznego istnienia (Golem) w kierunku robotów Čapka ze sztuki „R.U.R.“. Te dwa kierunki łączą się przez wynalezienie Sterowania Numerycznego (SN) w połowie XX w. i dzielą wspólny los. SN maszyn przemysłowych razem z manipulatorami wyposażonymi w SN – robotami przemysłowymi – rozpoczęły urzeczywistnianie się idei produkcji automatycznej.
W 1961r. amerykańska firma AMF (American Machine and Foundry Corporation – Amerykańska Korporacja Maszyn i Odlewnictwa) wprowadziła na rynek wielo-zadaniowy automat o nazwie “Robot Przemysłowy VERSATRAN” (VERSAtile – wszechstronny, TRANsfer - przemieszczać), który funkcjonował, jako człowiek przy maszynie produkcyjnej. Chociaż nie podobny do człowieka, stanowił początek dotychczas niespotykanego, dalszego rozwoju. Połączenie robotów

przemysłowych i SN maszyn produkcyjnych na przełomie XX i XXI w. spowodowało powstanie w pełni zautomatyzowanych fabryk, takich jak ta kierowana przez japońską firmę FANUC. Inne roboty przemysłowe znalazły zastosowanie w wielu dziedzinach niezwiązanych z produkcją, wliczając rolnictwo. Fragment Rys. 1-3 obramowany na czerwono przedstawia typową budowę robotów przemysłowych. Robot po lewej jest programowany za pomocą tzw. uczenia bezpośredniego. Oznacza to, że na początku, w trybie „TEACH“, prowadzony jest przez programistę wzdłuż pożądanej ścieżki, która jest rejestrowana w systemie sterowania. Następnie, w wyniku aktywacji nagranego programu, robot w pętli powtarza nauczoną ścieżkę w trybie „REPEAT“. Taki robot może być używany głównie podczas ciągłego spawania wzdłuż wymaganej ścieżki, lub do malowania farbą, czy powłoką ochronną. Robot po prawej jest programowany przy pomocy panelu sterującego, gdzie programista zawsze prowadzi robota do pożądanych punktów. Po zapamiętaniu punktów, robot wykonuje prace pomiędzy każdym z nich, lub dokładnie w ich miejscu w oparciu o wcześniej wydane polecenia. Taki robot jest bardzo przydatny np. do zgrzewania punktowego karoserii samochodów w fabrykach samochodowych.
Rys. 1-2: Uczenie bezpośrednie robota przemysłowego
Rys. 1-3: Schemat rozwoju maszyn przemysłowych i robotów
Zastosowania biorobotyczne (protetyczne), sterowane systemami MASTER-SLAVE, ewentualnie poprzez sygnały z układu nerwowego EMG (Elektromiografia), rozwinęły się jako pewna gałąź poboczna sterowania SN. Jednakże główny rozwój w robotyce podąża najbardziej fantastyczną ścieżką, jaką jest rozwój mobilnych, chodzących i humanoidalnych robotów (np. HONDA). Urządzenia te wykazują uderzające podobieństwo do fikcyjnych Golemów i nawet uczenie bezpośrednie robotów przemysłowych, które są poruszane przez operatora i które zapamiętują ten

ruch w systemie sterowania może nam przypominać ożywianie Golema za pomocą tajemniczego „šém“ wkładanego do jego głowy. Robot Pianista profesora Ichiro Kató z uniwersytetu Waseda w Tokyo akompaniował całej orkiestrze symfonicznej na światowej wystawie w Osace. Robot humanoidalny firmy Honda, tak samo jak inne „androidy“, może chodzić, wchodzić po schodach, tańczyć, nosić przedmioty itp. Tym samym roboty te niemal zasługują na ożywioną formę ich nazwy, która po czesku dosłownie brzmi „roboti“. 1.2. DEFINICJA ROBOTÓW Następujące kategorie mogą służyć do ogólnego porównania właściwości maszyn i ludzi w procesie produkcji:
- właściwości fizyczne, - możliwości funkcjonalne, - poziom intelektualny.
Ludzka świadomość określa granice poziomu intelektualnego potrzebnego i możliwego do uzyskania dla procesu produkcji. W danym przypadku, składa się on przede wszystkim na percepcję, zachowawczość, podejmowanie decyzji, pamięć i logikę. Możliwości funkcjonalne obejmują adaptacyjność, uniwersalność, możliwość ruchu w przestrzeni, zręczność itp. Właściwościami fizycznymi nazywa się siłę, prędkość, możliwość cyklicznej pracy, stabilność charakterystyk, odporność, niezawodność i inne. Trzy wyżej wymienione kategorie można wizualizować w postaci przestrzennego schematu we współrzędnych kartezjańskich x, y i z [4; p.38].
Rys. 1-4: Schematyczne porównanie człowieka i maszyny w procesie produkcji
Rys. 1-4 przedstawia bardzo schematyczny opis roli człowieka w procesie produkcyjnym, która charakteryzuje się bardzo wysokim poziomem intelektu (potrzebnego w procesie produkcji, o którym mowa), dosyć wysokim poziomem możliwości funkcjonalnych, ale również bardzo niskim poziomem właściwości fizycznych. Człowiek zdawał sobie z tego sprawę od zarania dziejów, dlatego wszystkie wcześniejsze maszyny praktycznie pomagały człowiekowi powiększyć jego możliwości fizyczne. Są one wizualizowane, jako tylko jeden wymiar, umieszczony na osi reprezentującej właściwości fizyczne.

Maszyny budowlane i im podobne maszyny, kontrolowane i obsługiwane bezpośrednio przez człowieka, na przykład koparki, zgarniarki, lub nawet stabilizatory, taśmociągi itp. stanowią maszyny mieszczące się w dwuwymiarowej płaszczyźnie określonej przez osie fizycznych właściwości i możliwości funkcjonalnych. Z drugiej strony, maszyny matematyczne i im podobne maszyny informatyczne (komputery, sterowniki) również są w dwóch wymiarach na powyższym wykresie, mieszczą się jednakże na płaszczyźnie określonej przez osie fizycznych właściwości i poziomu intelektualnego. Tylko połączenie, a raczej przenikanie dwóch rodzajów maszyn przedstawionych powyżej, powoduje powstanie manipulatora przemysłowego - robota, reprezentującego maszynę identyczną z trójwymiarowym wykresem roli człowieka w procesie produkcji w tym schemacie. Badania robotyki naturalnie obejmuje poszukiwania odpowiedniej definicji zarówno manipulatorów jak i robotów. Definicje pojęcia "robot" w literaturze światowej są dalekie od jednoznaczności. Jednakże niektóre definicje wynikające z liczby stopni swobody takiego urządzenia, takie jak: "Robot jest urządzeniem o więcej niż trzech stopniach swobody; urządzenia z mniejszą liczbą stopni swobody niż trzy nazywane są manipulatorami", albo "robot przemysłowy jest automatycznym urządzeniem manipulującym swobodnie programowalnym w trzech osiach wyposażonym w przenoszące ręce (chwytaki) lub instrumenty technologiczne przeznaczone do wykorzystania w przemyśle" świadczy o braku zrozumienia podstawowej filozofii robotyki. Niemniej jednak, ta ostatnia definicja nasuwa kolejne pytanie, a mianowicie czy robot i robot przemysłowy to identyczne urządzenia. Atrybut "przemysłowy" sugeruje to, co należy rozumieć przez ostatnią część definicji: roboty przemysłowe stanowią podzbiór robotów w ogóle. W odniesieniu do ogólnego pojęcia "robot" jest możliwa do przyjęcia definicja określona przez inż. Ivan M. Havel, CSc. [2], cytowany w [3, s. 20]: "Robot to zautomatyzowany lub sterowany komputerowo zintegrowany system, zdolny do samodzielnego, celowego oddziaływania ze środowiskiem naturalnym na podstawie dyspozycji wydawanych przez człowieka. Interakcja polega na wykrywaniu i rozpoznawaniu środowiska oraz na manipulowaniu przedmiotami lub poruszaniu się w środowisku". Powyższa definicja ma zastosowanie niewątpliwie do wielu różnych systemów zrobotyzowanych, nie tylko przemysłowych. Natura "robota przemysłowego" została trafnie określona przez Prof. P. N. Beljanin [1]: "Robot przemysłowy jest niezależnie funkcjonującą maszyną - automatem, mającą na celu powielanie niektórych ruchowych i intelektualnych funkcji człowieka podczas wykonywania pomocniczych i podstawowych procesów produkcyjnych bez bezpośredniego uczestnictwa człowieka i który jest wyposażony w tym celu w niektóre zdolności człowieka (słuch, wzrok, dotyk, pamięć itp.), umiejętność samodzielnej nauki, samoorganizacji i adaptacji, czyli np. przystosowania do danego środowiska. " Zdefiniowane urządzenie rzeczywiście jest pożądanym zastępstwem człowieka w procesie produkcji. Bez względu na to, czy jest to robot przemysłowy, czy manipulator, powinno zostać określone w oparciu o analizę jego poziomu inteligencji, tj. systemu kontroli. Zgodnie z tekstem towarzyszącym Rys. 1-4, nie ma jednolitego kryterium pozwalającego na ścisły podział manipulatorów i robotów przemysłowych.

2. STRUKTURA ROBOTÓW PRZEMYSŁOWYCH I MANIPULATORÓW (RPiM)
2.1. STRUKTURA KINEMATYCZNA RPiM 2.1.1. System ruchu stacjonarnych RPiM
Na podstawie wyżej wymienionych definicji robotów i z ogólnego spojrzenia na te skomplikowane urządzenia można wyraźnie wywnioskować, że roboty przemysłowe należy rozumieć jako pewien podzbiór robotów jako takich. Te reprezentowane są w szczególności przez roboty mobilne wykorzystujące różnych typów podwozia kołowe lub pasowe do przemieszczania, lub roboty z nogami, czasem nawet wykonane na podobieństwo zwierząt lub androidów. Szczególnie w systemach robotów mobilnych, ramię stanowi mechanizm manipulacji, który praktycznie jest, z globalnego punktu widzenia, systemem pozycjonowania samym w sobie. Może być używany jako stacjonarny robot przemysłowy i może być dodatkowo wyposażony w proste lub bardziej skomplikowane mechanizmy poruszania. W zakresie budowy RPiM system ruchu można podzielić w następujący sposób:
- mechanizm poruszania - mechanizm pozycjonowania - mechanizm orientacji - efektory końcowe
Zgodnie z Rys. 2-1, punkt odniesienia "Br" znajduje się pomiędzy mechanizmem pozycjonowania i orientacji. Punkt ten kończy podstawowy łańcuch kinematyczny (PŁK), składający się z mechanizmu pozycjonowania, czasami również rozszerzonego o mechanizm poruszania się. Łańcuch kinematyczny (ŁK) składa się z podstawowego łańcucha kinematycznego i mechanizmu orientacji. Pomiędzy mechanizmem orientacji i końcowym efektorem może znajdować się kompensator położenia. Podział elementów systemu ruchu robotów wyposażonych w liniowy mechanizm poruszania się jest przedstawiony na Rys. 2-1.
a. b.
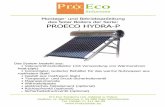
Rys. 2-1: Przykładowe wyszczególnienie elementów systemu ruchu stacjonarnego robota przemysłowego.
a. Przemysłowy robot adaptacyjny APR- 20 VUKOV-PREŠOV (SK) b. Robot przemysłowy BEROE RB-321(BG)
X - mechanizm poruszania mechanizm pozycjonujący - CBB’ (APR-20), CZY (BEROE RB-321) Br - punkt odniesienia A0, B0, C0 - mechanizm orientacji (zakresy możliwych ruchów)
X, Y, Z – translacja wzdłuż osi x, y, z A, B, C – rotacja wzdłuż osi x, y, z A0, B0, C0 - rotacja wzdłuż osi mechanizmu orientacyjnego











![Nap z poprawkami 12.08.2008 - Wargaming · Przelicznik dla 5/6mm figurek jest podany w Dodatku VI. c) -HGQR G]LDáR KDXELFD Z\U]XWQLD UDNLHWRZD OX b przodek UHSUH]HQWXMH GZLH V]WXNL](https://static.fdocuments.pl/doc/165x107/5b0016597f8b9a89598c13c2/nap-z-poprawkami-12082008-dla-56mm-figurek-jest-podany-w-dodatku-vi-c-hgqr.jpg)