Zagadnieniausers.cbk.waw.pl/~kosek/SEMZGP/trzeciawersja.pdf · · 2009-02-13• Sygnały na E5 -...
51
Transcript of Zagadnieniausers.cbk.waw.pl/~kosek/SEMZGP/trzeciawersja.pdf · · 2009-02-13• Sygnały na E5 -...

Zagadnienia:Zagadnienia:–– ZaZałłoożżone czone częęstotliwostotliwośścici
–– PrzeglPrzegląąd sygnad sygnałłóów systemuw systemu
•• SygnaSygnałły na L1y na L1•• SygnaSygnałły na E6y na E6•• SygnaSygnałły na E5y na E5
-- Modulacje sygnaModulacje sygnałłóów i ich charakterystykaw i ich charakterystyka
-- Budowa depeszy nawigacyjnejBudowa depeszy nawigacyjnej
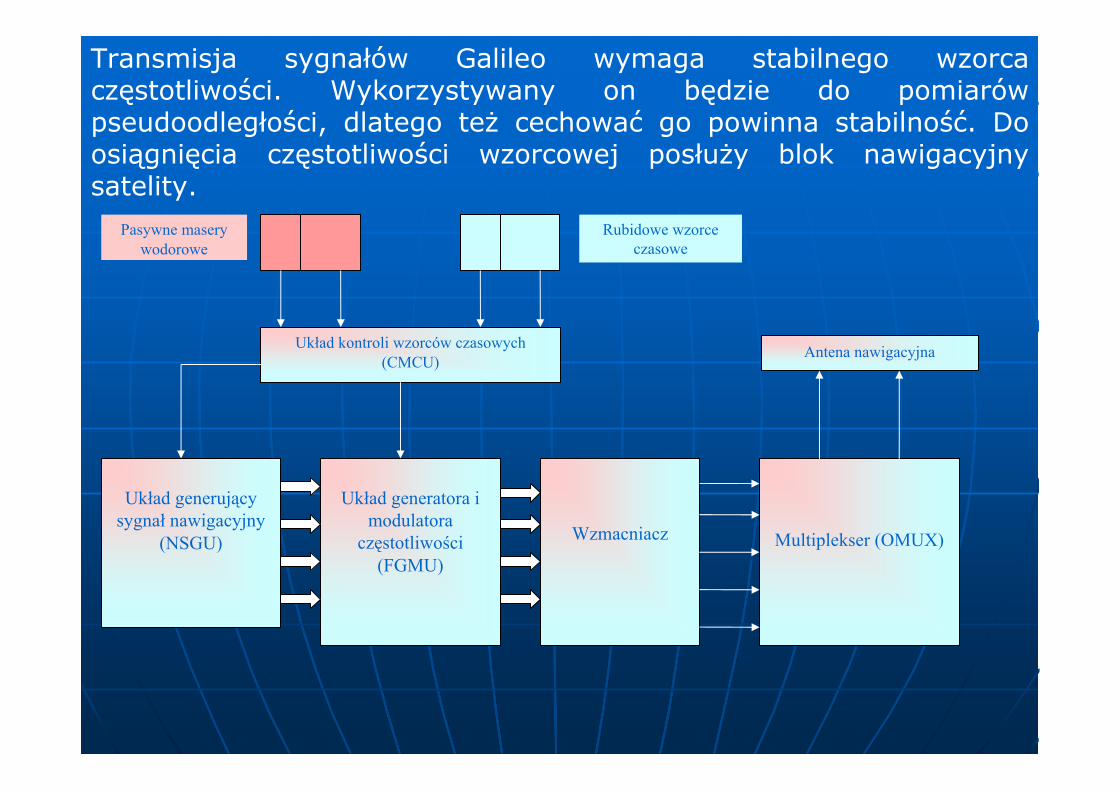
Transmisja sygnałów Galileo wymaga stabilnego wzorca częstotliwości. Wykorzystywany on będzie do pomiarów pseudoodległości, dlatego też cechować go powinna stabilność. Do osiągnięcia częstotliwości wzorcowej posłuży blok nawigacyjny satelity.
Układ generujący sygnał nawigacyjny
(NSGU)
Pasywne masery wodorowe
Układ kontroli wzorców czasowych (CMCU)
Układ generatora i modulatora
częstotliwości (FGMU)
Wzmacniacz Multiplekser (OMUX)
Antena nawigacyjna
Rubidowe wzorce czasowe
Urządzeniem, które ma za zadanie zintegrować czterywzorce czasowe w jeden podsystem to CMCU (Clock Monitoring and Control Unit). Ma on za zadanie wytworzyć i przesłać sygnał o częstotliwości 10,23 MHz z wzorców do dalszych komponentów bloku nawigacyjnego. Kluczowym elementem bloku jest NSGU- Navigation Signal Generation Unit. Generowane przez układ cyfrowy sygnały są przekazywane następnie do układu modulatora i generatora częstotliwości FGMU (Frequency Generator/Modulator Unit). , który następnie przekazuje go do wzmacniacza. Zadaniem wzmacniacza jest z kolei generacja sygnałów nośnych, w tym wypadku czterech na dwóch pasmach częstotliwości
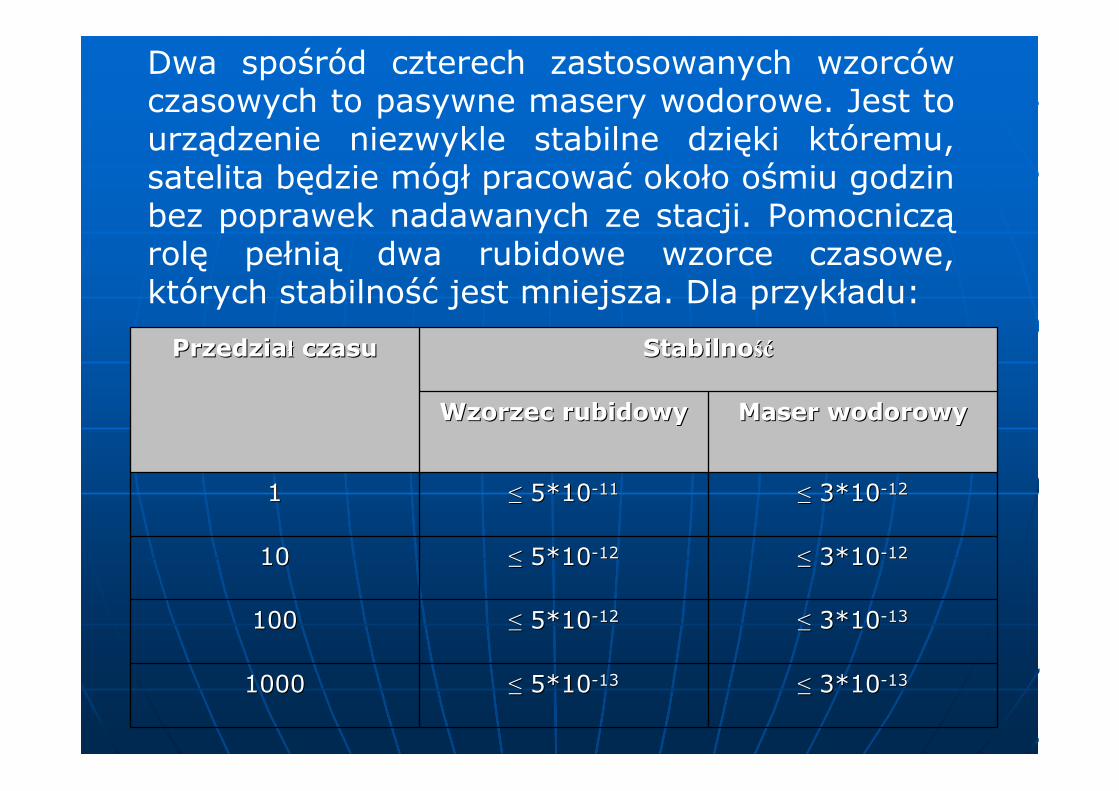
Dwa spośród czterech zastosowanych wzorców czasowych to pasywne masery wodorowe. Jest to urządzenie niezwykle stabilne dzięki któremu, satelita będzie mógł pracować około ośmiu godzin bez poprawek nadawanych ze stacji. Pomocnicząrolę pełnią dwa rubidowe wzorce czasowe, których stabilność jest mniejsza. Dla przykładu:
≤≤ 3*103*10--1313≤≤ 5*105*10--131310001000
≤≤ 3*103*10--1313≤≤ 5*105*10--1212100100
≤≤ 3*103*10--1212≤≤ 5*105*10--12121010
≤≤ 3*103*10--1212≤≤ 5*105*10--111111
Maser wodorowyMaser wodorowyWzorzec rubidowyWzorzec rubidowy
StabilnoStabilnośćśćPrzedziaPrzedziałł czasuczasu
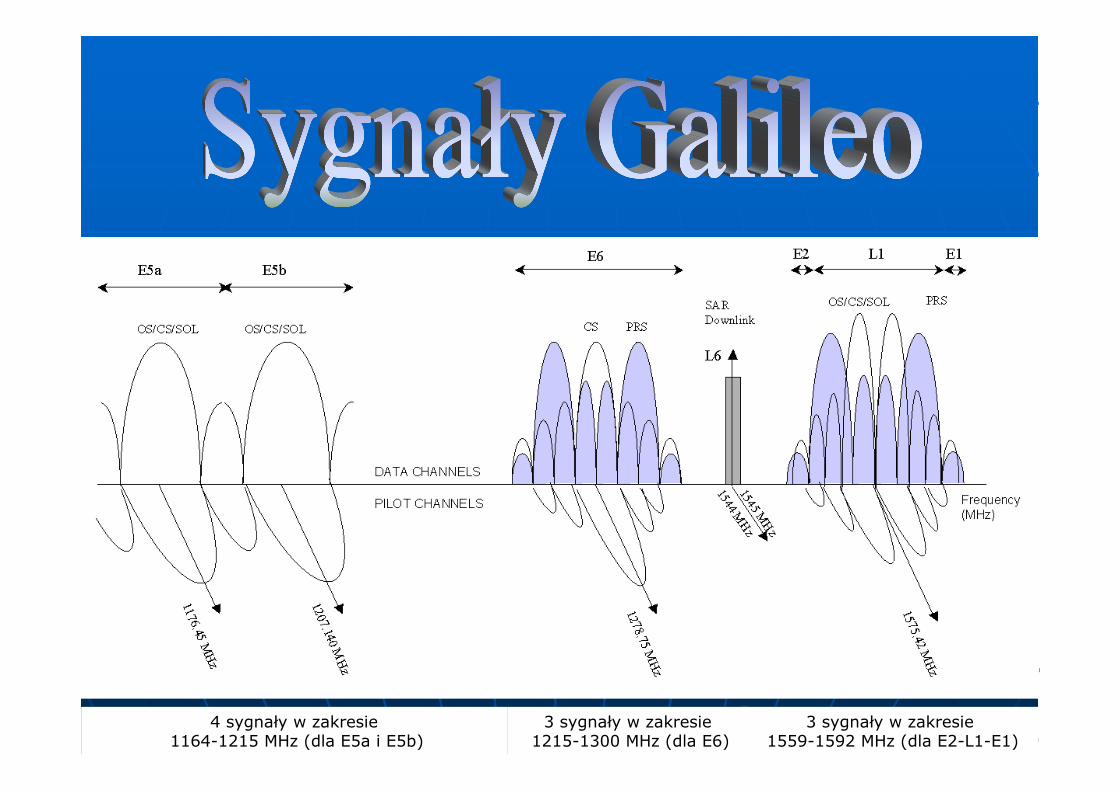
4 sygnały w zakresie1164-1215 MHz (dla E5a i E5b)
3 sygnały w zakresie 1215-1300 MHz (dla E6)
3 sygnały w zakresie 1559-1592 MHz (dla E2-L1-E1)
Przy tworzeniu sygnału bardzo ważną rolę odgrywa CDMA, czyli dostęp wielokrotny z podziałem kodowym. Wszystkie satelity transmitują na tej samej częstotliwości, oznacza to, że sygnałGalileo, np. L1 jest wysyłany na częstotliwości 1575,42 MHz z każdej satelity. By pozwolić odbiornikowi na rozróżnienie, od
której satelity dany sygnał pochodzi i by umożliwić mu pomiar czasu biegu sygnału od satelity do odbiornika, na dany sygnałnakładany jest kod. Kod jest różny dla każdego satelity i dzięki
niemu będzie można zidentyfikować satelitę.
Spośród sygnałów systemu Galileo wyróżnić będzie można sześćsygnałów pilotowych i cztery sygnały danych. Istnieje zasadnicza różnica między sygnałami zawierającymi dane nawigacyjne (data channels) i sygnałami nie zawierającymi danych (pilot channels). Są one przesunięte w fazie o 90 stopni, co pozwala odbiornikowi
na ich oddzielenie.
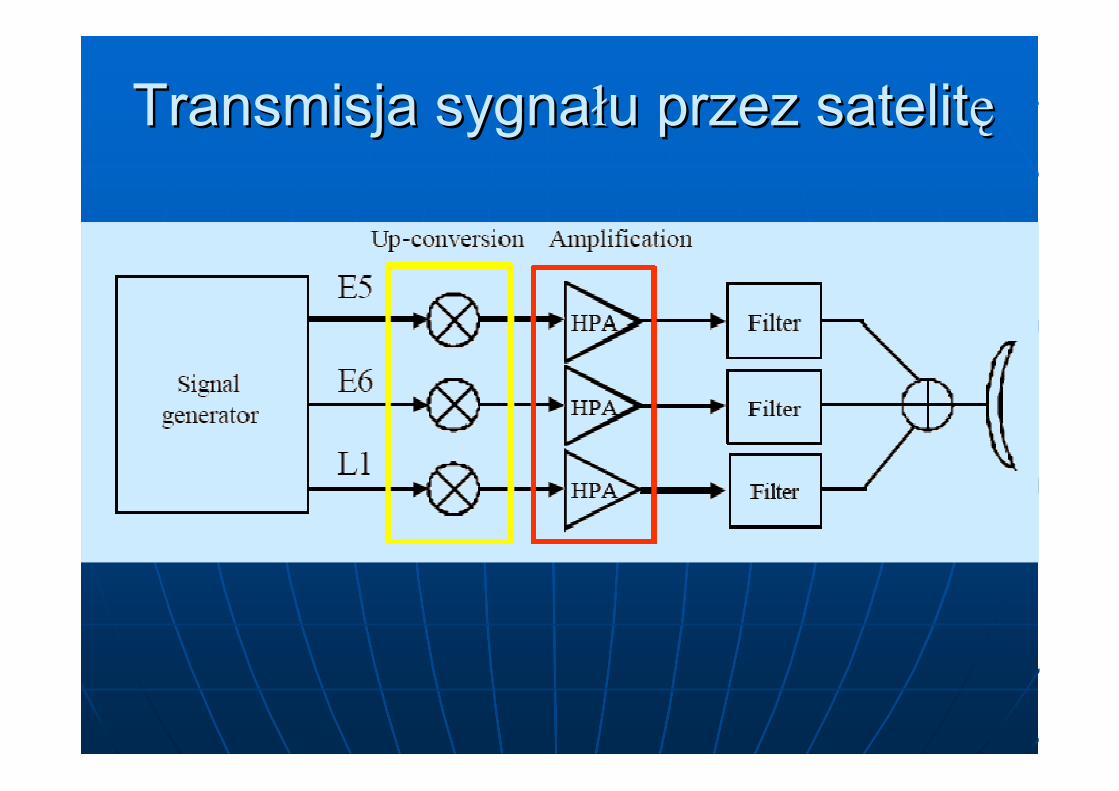
Transmisja sygnaTransmisja sygnałłu przez satelitu przez satelitęę
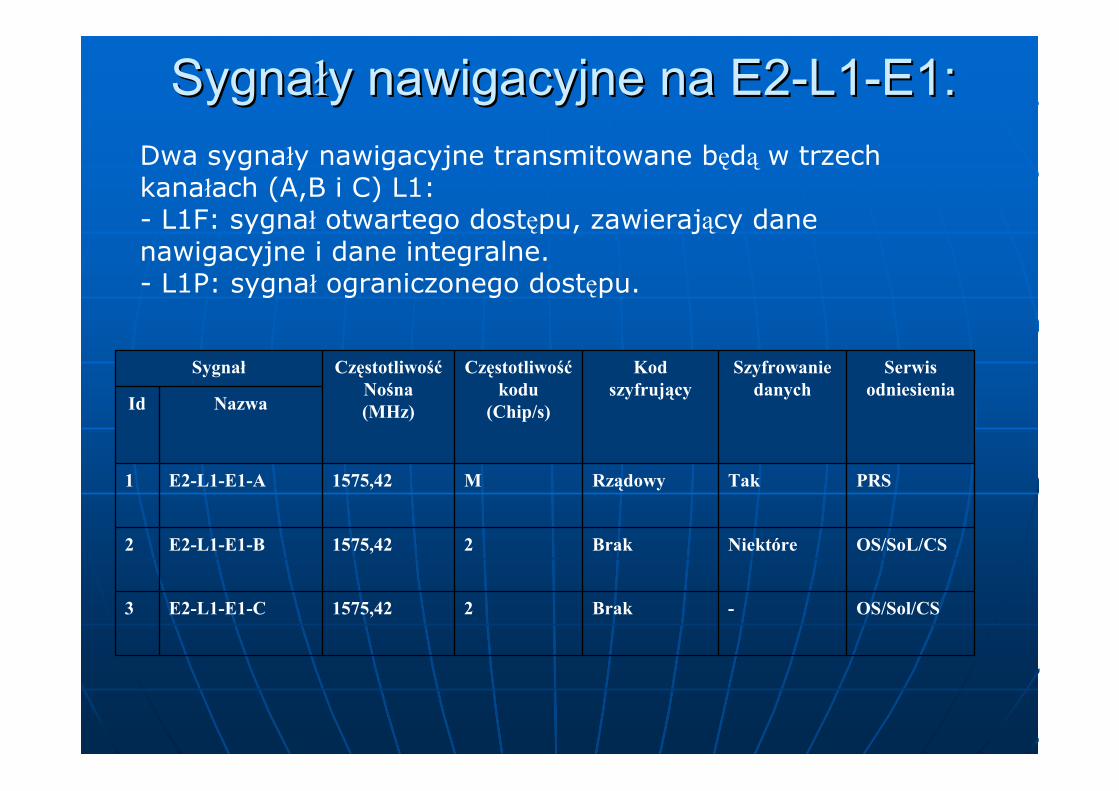
SygnaSygnałłyy nawigacyjnenawigacyjne nana E2E2--L1L1--E1E1::Dwa sygnały nawigacyjne transmitowane będą w trzech kanałach (A,B i C) L1:- L1F: sygnał otwartego dostępu, zawierający dane nawigacyjne i dane integralne.- L1P: sygnał ograniczonego dostępu.
OS/Sol/CS-Brak21575,42E2-L1-E1-C3
OS/SoL/CSNiektóreBrak21575,42E2-L1-E1-B2
PRSTakRządowyM1575,42E2-L1-E1-A1
NazwaId
Serwis odniesienia
Szyfrowanie danych
Kod szyfrujący
Częstotliwośćkodu
(Chip/s)
CzęstotliwośćNośna(MHz)
Sygnał
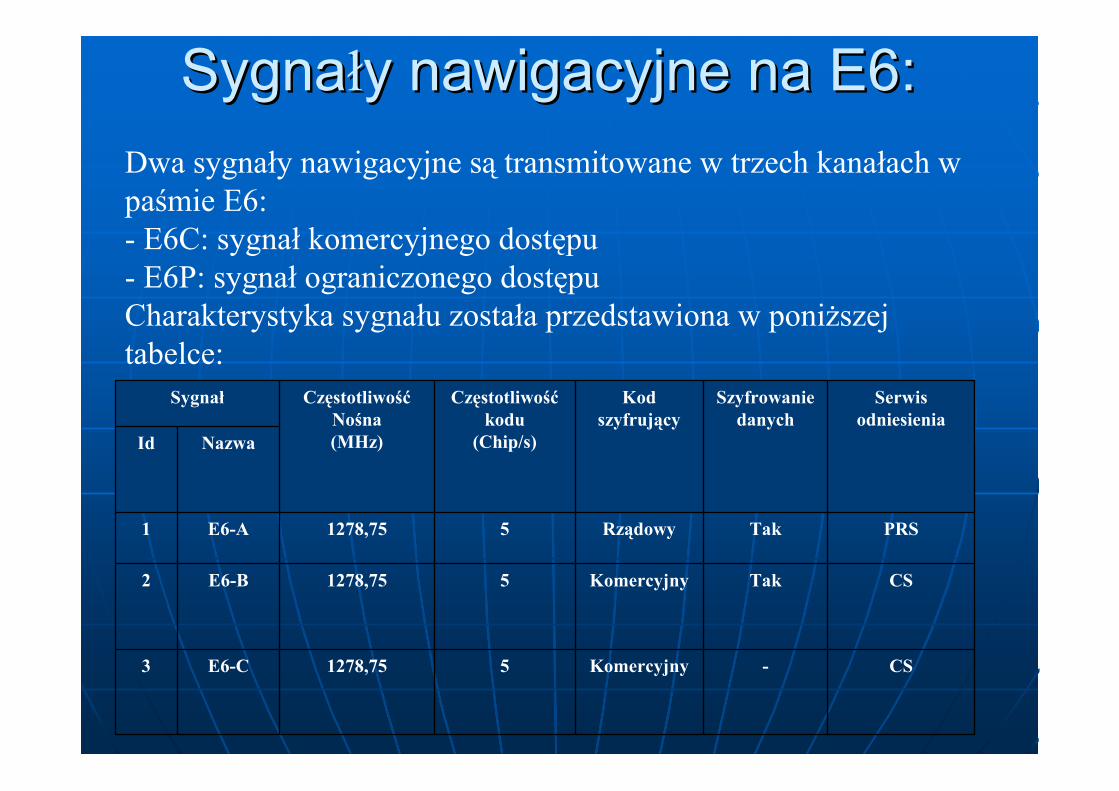
SygnaSygnałłyy nawigacyjnenawigacyjne nana E6:E6:Dwa sygnały nawigacyjne są transmitowane w trzech kanałach w paśmie E6:- E6C: sygnał komercyjnego dostępu- E6P: sygnał ograniczonego dostępuCharakterystyka sygnału została przedstawiona w poniższej tabelce:
CS-Komercyjny51278,75E6-C3
CSTakKomercyjny51278,75E6-B2
PRSTakRządowy51278,75E6-A1
NazwaId
Serwis odniesienia
Szyfrowanie danych
Kod szyfrujący
Częstotliwośćkodu
(Chip/s)
CzęstotliwośćNośna(MHz)
Sygnał

SygnaSygnałły nawigacyjne na E5:y nawigacyjne na E5:Dwa sygnały nawigacyjne są transmitowane w czterech kanałach pasma E5:- E5a: sygnał otwartego dostępu, zawierający podstawowe dane dla nawigacji i wyznaczeń czasu- E5b: sygnał otwarty, zawierający dane nawigacyjne i integrujące.Charakterystyka sygnału została przedstawiona w poniższej tabelce:
OS/Sol/CS-Brak101207,14E5b-Q4
OS/Sol/CSNiektóreBrak101207,14E5b-13
Os/SoL-Brak101176,45E5a-Q2
OS/SoLBrakBrak101176,45E5a-11
NazwaId
Serwis odniesienia
Szyfrowanie danych
Kod szyfrujący
Częstotliwośćkodu
(Chip/s)
CzęstotliwośćNośna(MHz)
Sygnał
Modulacja jest procesem, polegającym na zmianie jednego z parametrów fali nośnej, zgodnie ze zmianami sygnału informacyjnego (nakładaniu informacji na falę nośną).
Pierwszy projekt sygnaPierwszy projekt sygnałłu u Galileo zrodziGalileo zrodziłł sisięę w 2001 w 2001 roku w dwroku w dwóóch dokumentach: ch dokumentach: ‘‘TheThe Galileo Galileo FrequencyFrequencyStructureStructure andand SignalSignal DesignDesign’’oraz oraz ‘‘Status Status ofof Galileo Galileo FrequencyFrequency andand SignalSignalDesignDesign’’..
Oba te dokumenty staOba te dokumenty stałły siy sięębazowymi do tworzenia bazowymi do tworzenia nowych modulacji sygnanowych modulacji sygnałłu.u.

ChcChcąąc poruszyc poruszyćć zagadnienie sygnazagadnienie sygnałłu u systemu Galileo, nalesystemu Galileo, należży przey prześśledziledziććnastnastęępujpująące zagadnienia:ce zagadnienia:
Modulacja BOC, MBOCModulacja BOC, MBOCModulacja BPSK, QPSKModulacja BPSK, QPSKMultiplexingMultiplexing CASM, CASM, AltBOCAltBOC
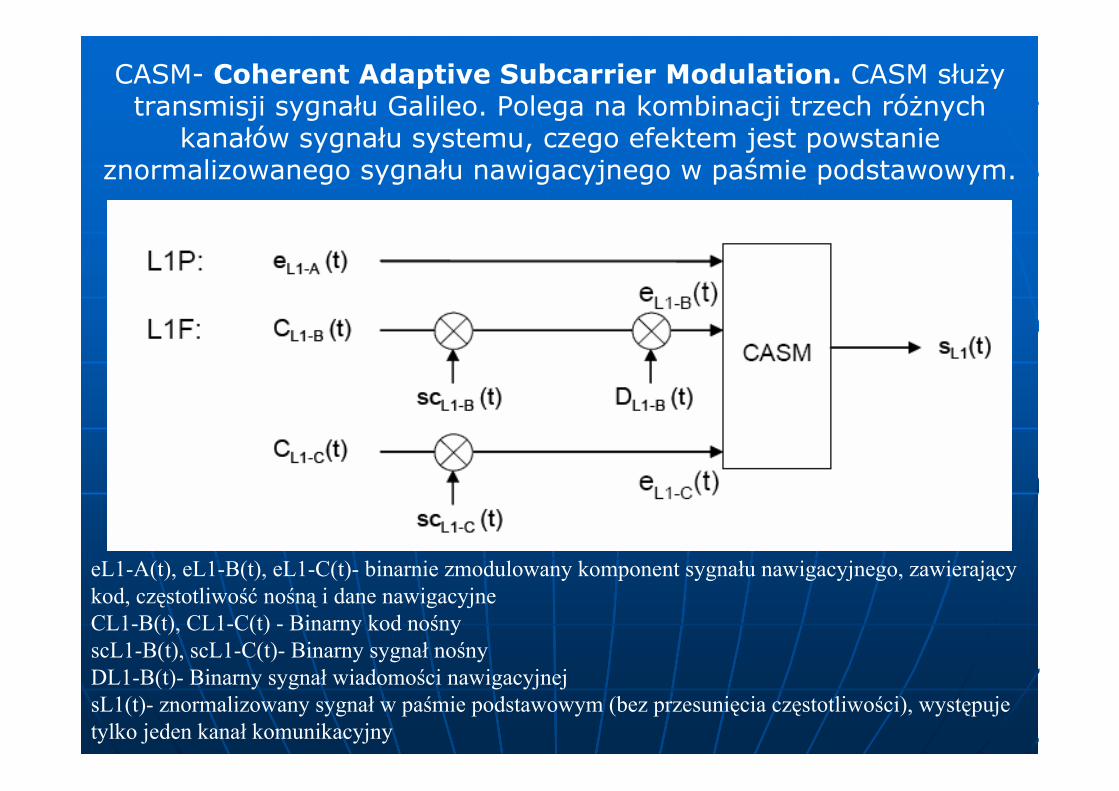
CASM- Coherent Adaptive Subcarrier Modulation. CASM służy transmisji sygnału Galileo. Polega na kombinacji trzech różnych
kanałów sygnału systemu, czego efektem jest powstanie znormalizowanego sygnału nawigacyjnego w paśmie podstawowym.
eL1-A(t), eL1-B(t), eL1-C(t)- binarnie zmodulowany komponent sygnału nawigacyjnego, zawierający kod, częstotliwość nośną i dane nawigacyjneCL1-B(t), CL1-C(t) - Binarny kod nośnyscL1-B(t), scL1-C(t)- Binarny sygnał nośnyDL1-B(t)- Binarny sygnał wiadomości nawigacyjnejsL1(t)- znormalizowany sygnał w paśmie podstawowym (bez przesunięcia częstotliwości), występuje tylko jeden kanał komunikacyjny
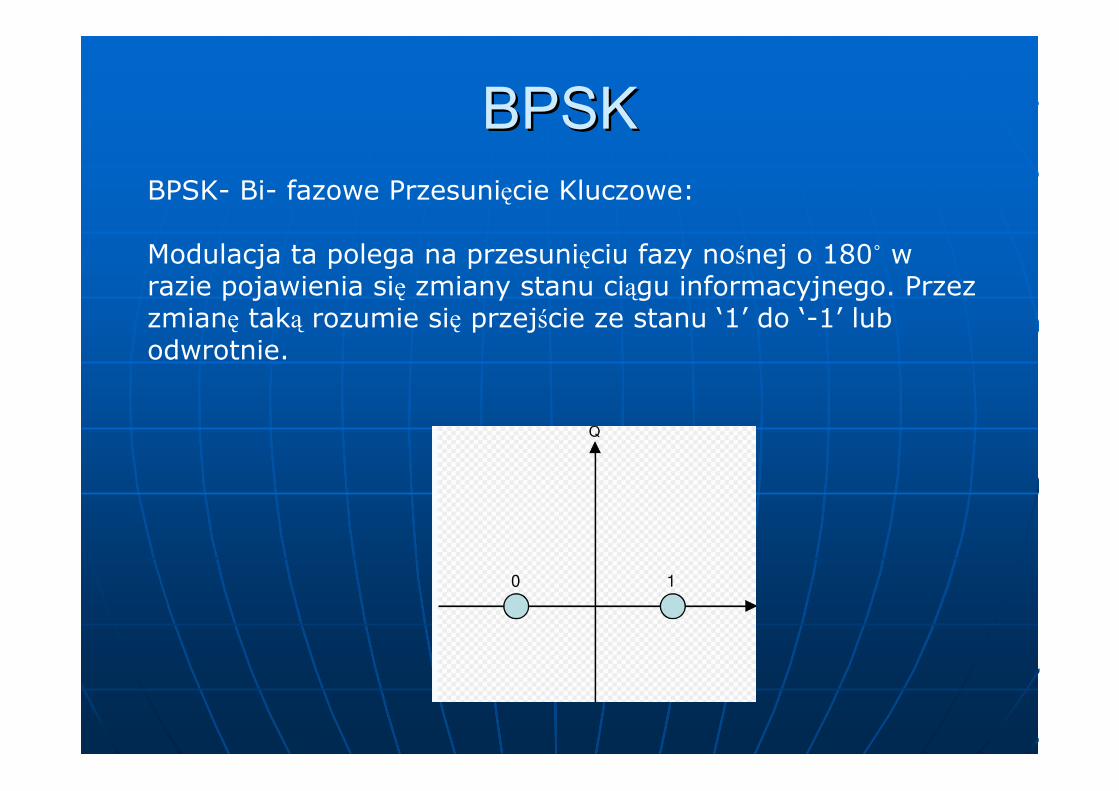
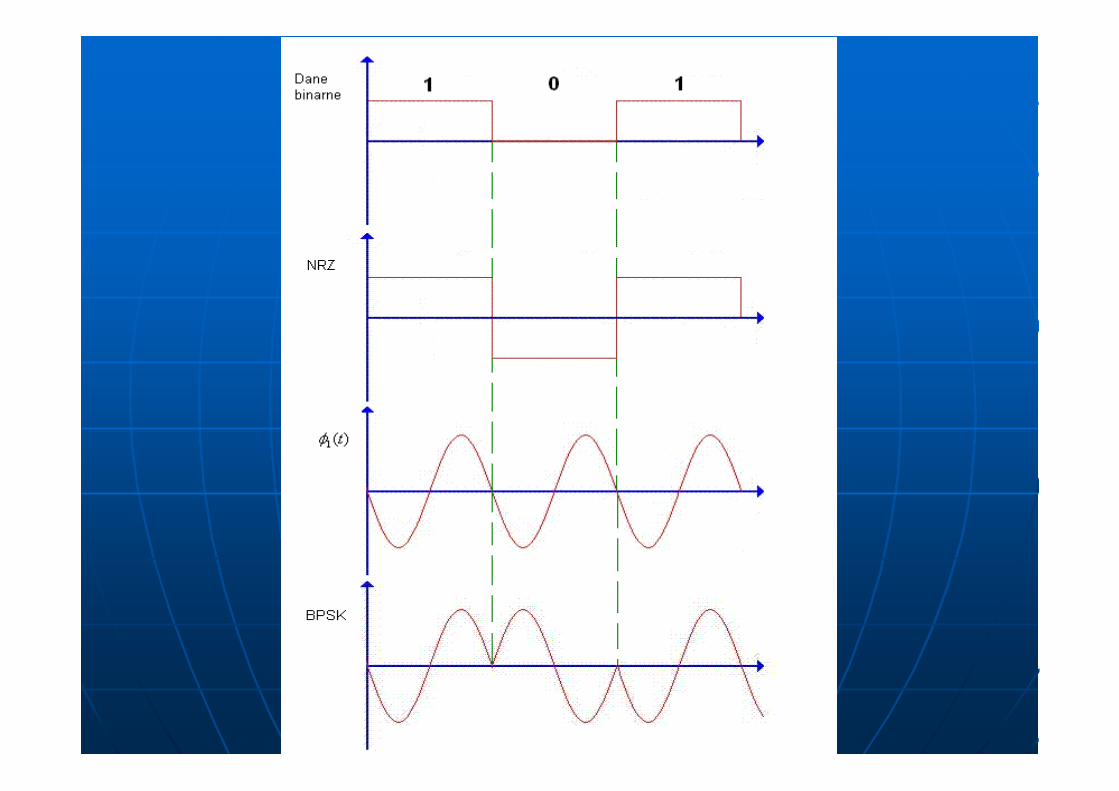
BPSKBPSKBPSK- Bi- fazowe Przesunięcie Kluczowe:
Modulacja ta polega na przesunięciu fazy nośnej o 180˚ w razie pojawienia się zmiany stanu ciągu informacyjnego. Przez zmianę taką rozumie się przejście ze stanu ‘1’ do ‘-1’ lub odwrotnie.
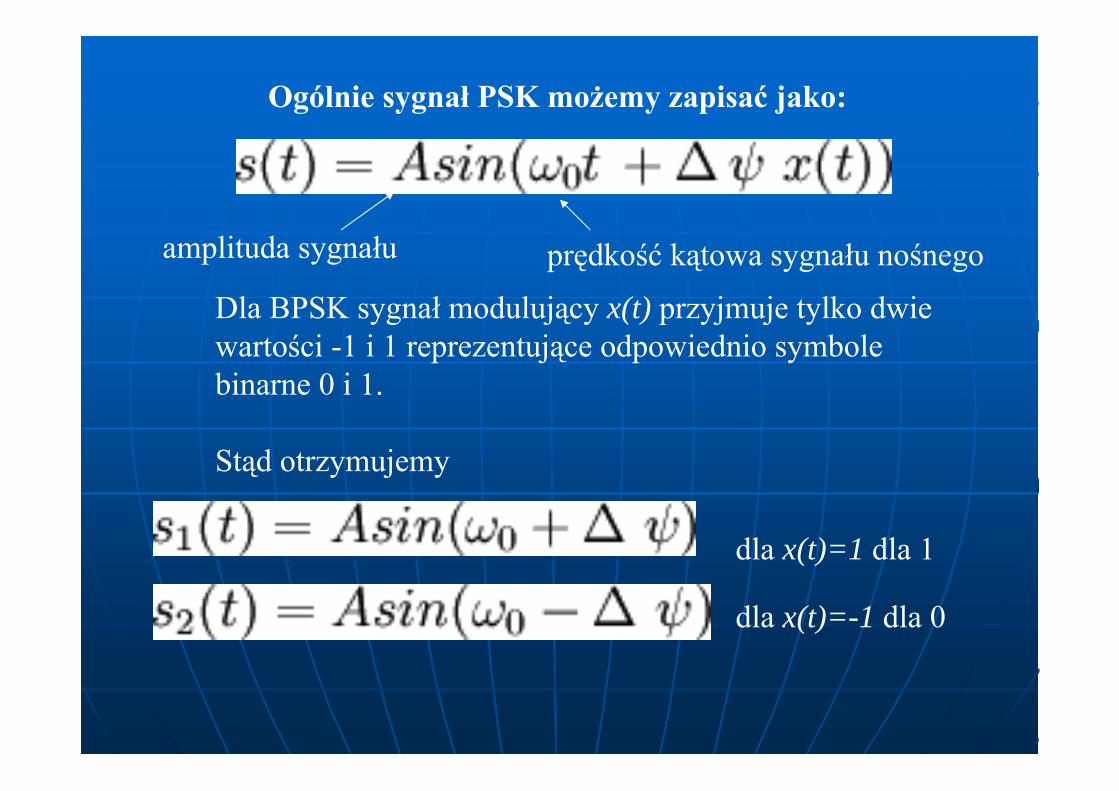
Ogólnie sygnał PSK możemy zapisać jako:
amplituda sygnału
Dla BPSK sygnał modulujący x(t) przyjmuje tylko dwie wartości -1 i 1 reprezentujące odpowiednio symbole binarne 0 i 1.
Stąd otrzymujemy
prędkość kątowa sygnału nośnego
dla x(t)=1 dla 1
dla x(t)=-1 dla 0
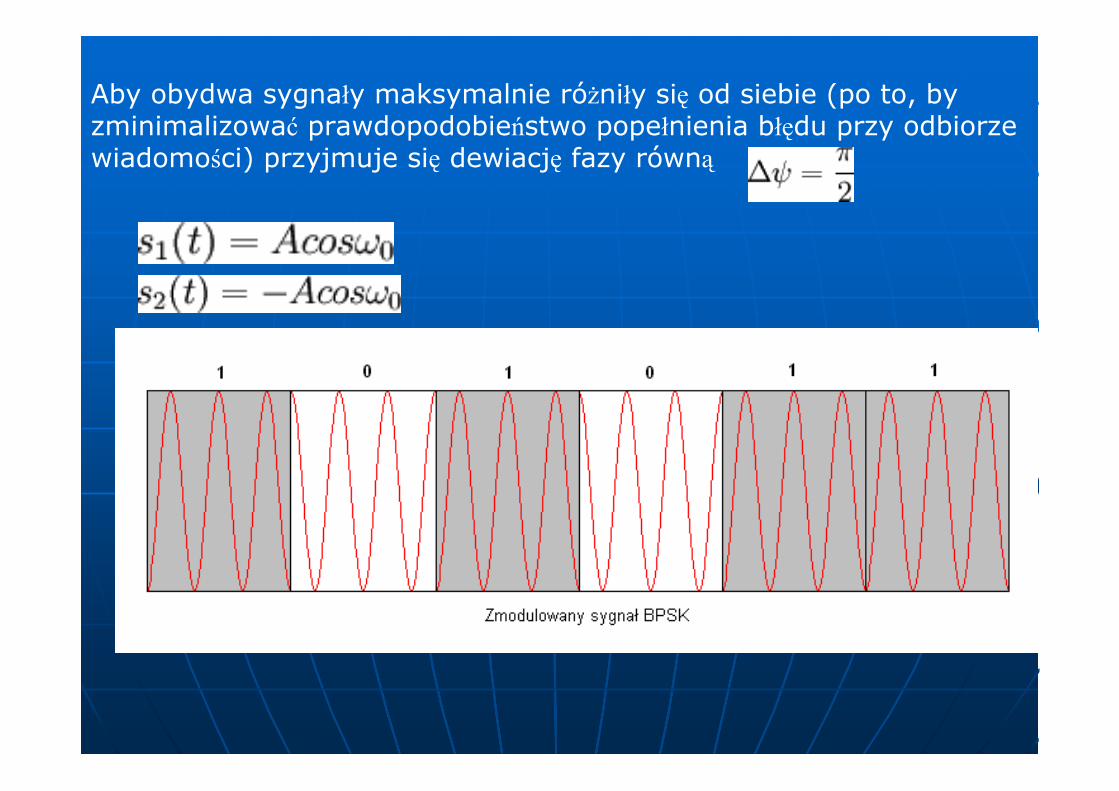
Aby obydwa sygnały maksymalnie różniły się od siebie (po to, by zminimalizować prawdopodobieństwo popełnienia błędu przy odbiorze wiadomości) przyjmuje się dewiację fazy równą

ModulacjaModulacja BOCBOCStandardowa modulacja BOC jest kwadratem modulacji sygnału
nośnego na sygnał BPSK:
Modulacja BOC o zadanej częstotliwości nośnej i chipowaniuzapisywana jest w następujący sposób: BOC (fs ,fc), gdzie fs to wielokrotność 1,023 MHz, a rata chipowania fc to wielokrotność1,023 Mcps
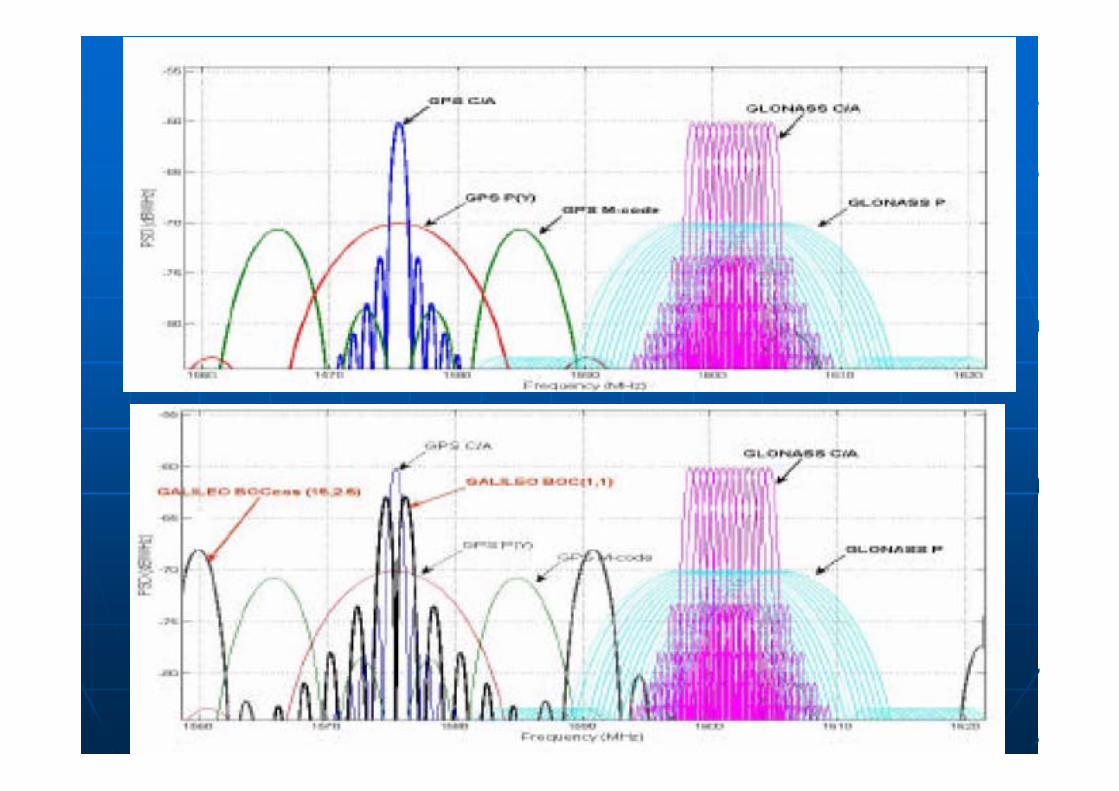
BOCcos(15,2.5)BOC(1,1)
BOC(10,5)
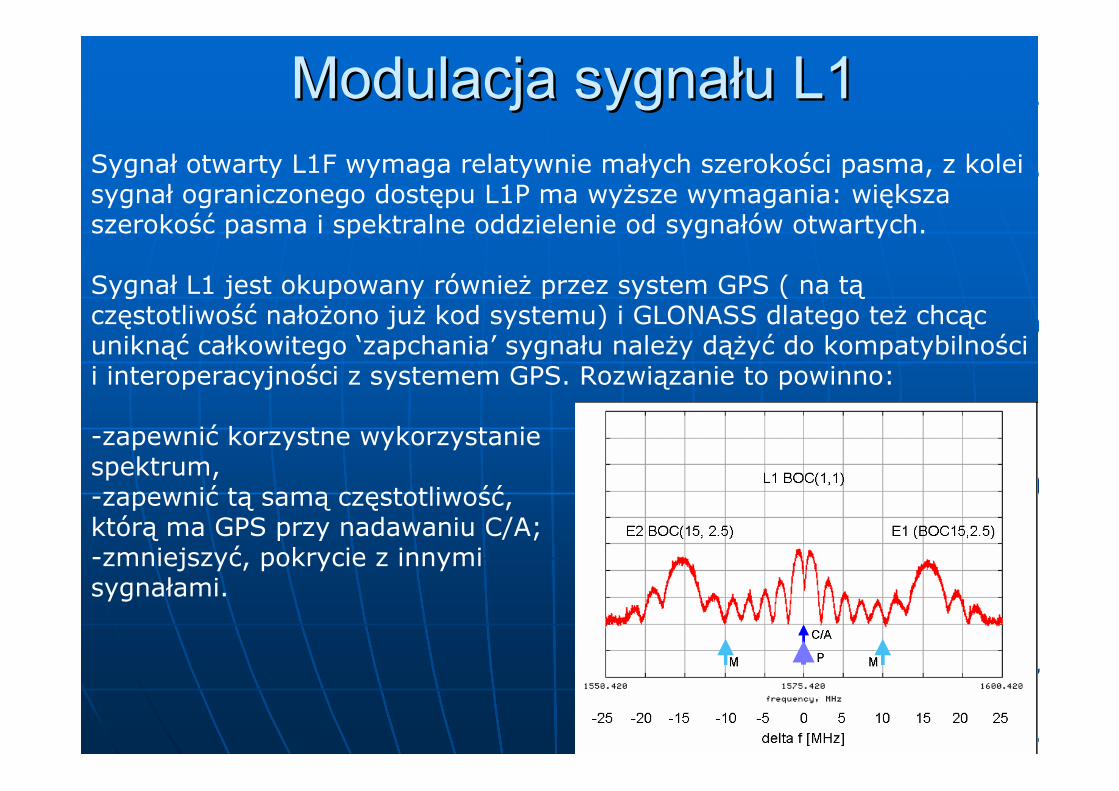
ModulacjaModulacja sygnasygnałłuu L1L1Sygnał otwarty L1F wymaga relatywnie małych szerokości pasma, z kolei sygnał ograniczonego dostępu L1P ma wyższe wymagania: większa szerokość pasma i spektralne oddzielenie od sygnałów otwartych.
Sygnał L1 jest okupowany również przez system GPS ( na tączęstotliwość nałożono już kod systemu) i GLONASS dlatego też chcąc uniknąć całkowitego ‘zapchania’ sygnału należy dążyć do kompatybilności i interoperacyjności z systemem GPS. Rozwiązanie to powinno:
-zapewnić korzystne wykorzystanie spektrum,-zapewnić tą samą częstotliwość, którą ma GPS przy nadawaniu C/A;-zmniejszyć, pokrycie z innymi sygnałami.
MBOCMBOC
MBOC ( MBOC ( MultiplexMultiplex BinaryBinary Offset Offset CarrierCarrier) ) jest rezultatem pojest rezultatem połąłączenia BOC(1,1) i czenia BOC(1,1) i BOC(5,1). Jego idea zrodziBOC(5,1). Jego idea zrodziłła sia sięę z z potrzeby modulacji, ktpotrzeby modulacji, któóra dara dałłaby sygnaaby sygnałłdostdostęępny Serwisowi Otwartemu, jak pny Serwisowi Otwartemu, jak rróówniewnieżż spespełłniajniająący oczekiwania sektora cy oczekiwania sektora bezpieczebezpieczeńństwa. Ostatecznie eksperci z stwa. Ostatecznie eksperci z USA i Europy zoptymalizowali modulacjUSA i Europy zoptymalizowali modulacjęęMBOC (6,1) dla L1CS i E1 OS sygnaMBOC (6,1) dla L1CS i E1 OS sygnałłu u Galileo.Galileo.
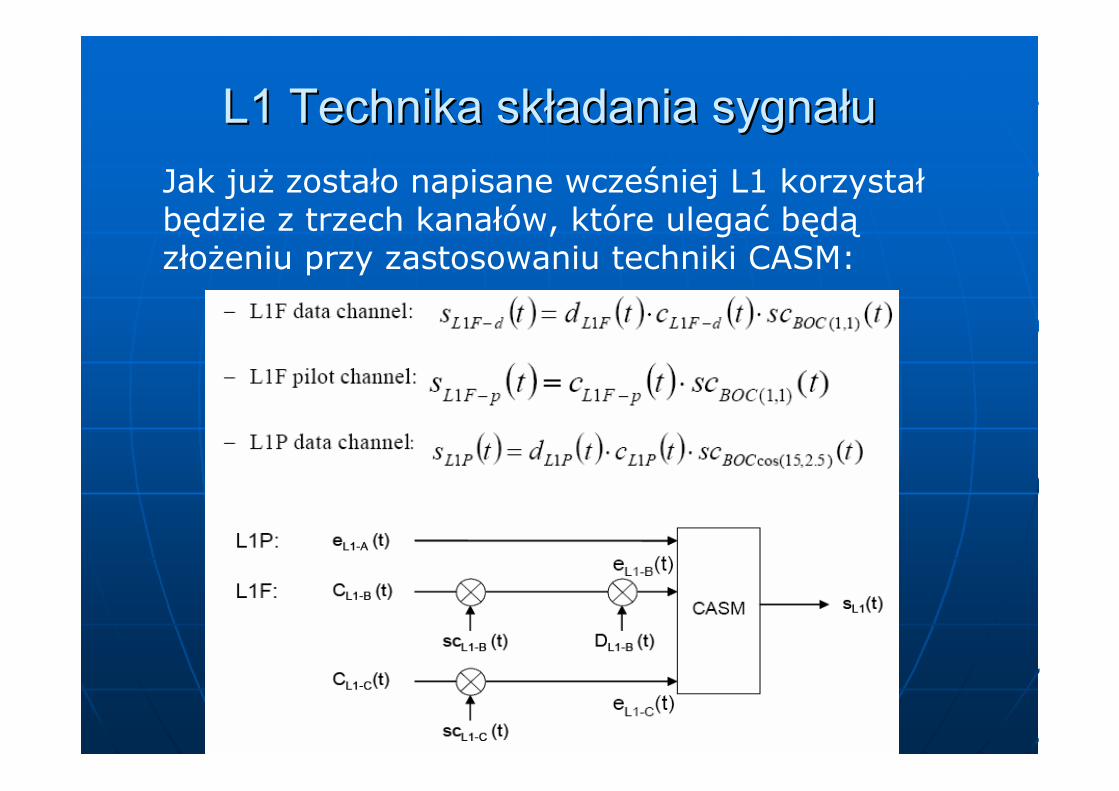
L1 Technika skL1 Technika skłładania sygnaadania sygnałłuuJak już zostało napisane wcześniej L1 korzystałbędzie z trzech kanałów, które ulegać będązłożeniu przy zastosowaniu techniki CASM:
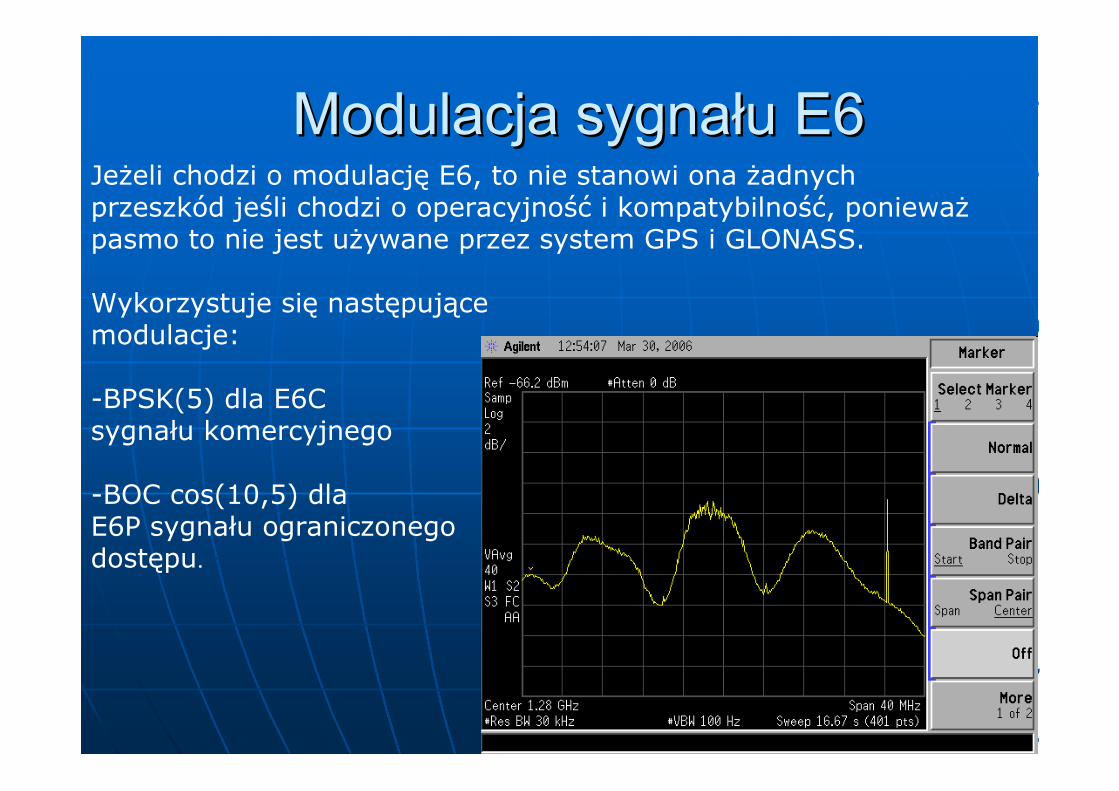
Modulacja sygnaModulacja sygnałłu E6u E6Jeżeli chodzi o modulację E6, to nie stanowi ona żadnych przeszkód jeśli chodzi o operacyjność i kompatybilność, ponieważpasmo to nie jest używane przez system GPS i GLONASS.
Wykorzystuje się następujące modulacje:
-BPSK(5) dla E6C sygnału komercyjnego
-BOC cos(10,5) dla E6P sygnału ograniczonego dostępu.
Jeśli chodzi o technikę złożenia sygnału, znów pojawia się tu CASM. Występują tu również trzy kanały transmisji:
E6 technika skE6 technika skłładania sygnaadania sygnałłuu
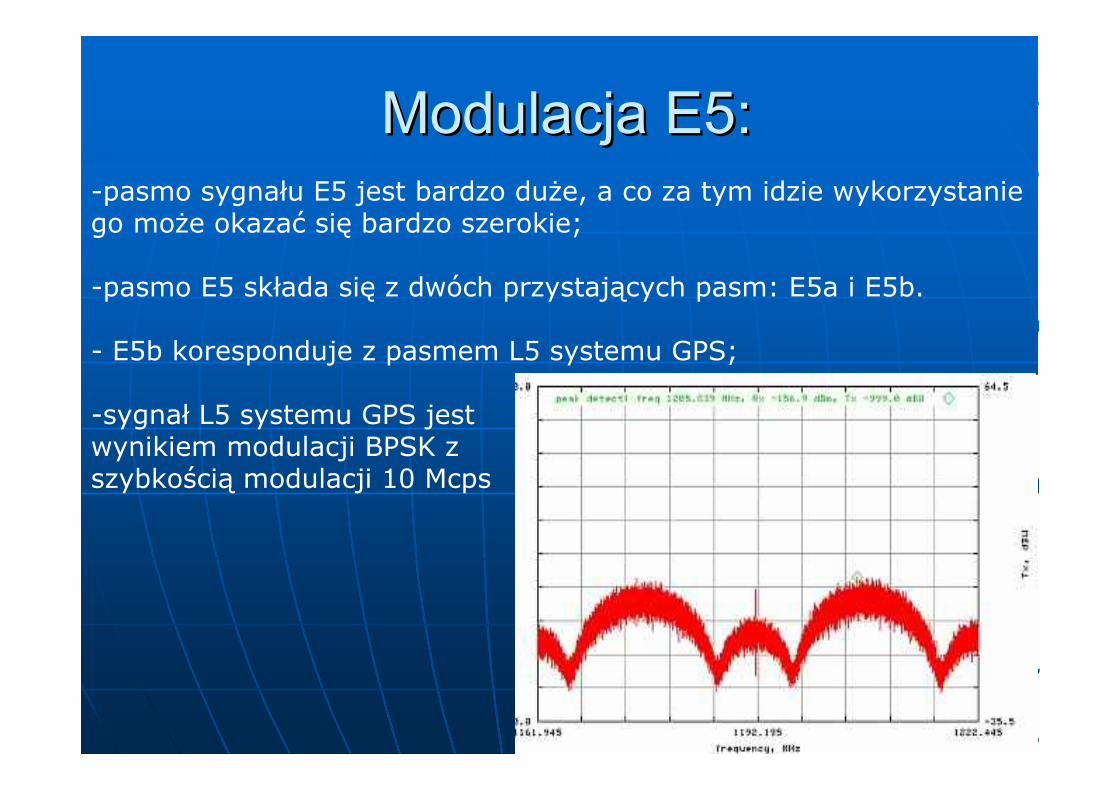
ModulacjaModulacja E5:E5:-pasmo sygnału E5 jest bardzo duże, a co za tym idzie wykorzystanie go może okazać się bardzo szerokie;
-pasmo E5 składa się z dwóch przystających pasm: E5a i E5b.
- E5b koresponduje z pasmem L5 systemu GPS;
-sygnał L5 systemu GPS jest wynikiem modulacji BPSK z szybkością modulacji 10 Mcps
E5 technika zE5 technika złłoożżenia sygnaenia sygnałłuu
Jeżeli chodzi o złożenia sygnału, ulegną mu cztery kanały:
Istnieją dwie możliwości złożenia przystających do siebie sygnałów E5a i E5b (gdzie każdy zawiera kanał danych i kanał pilotażowy):
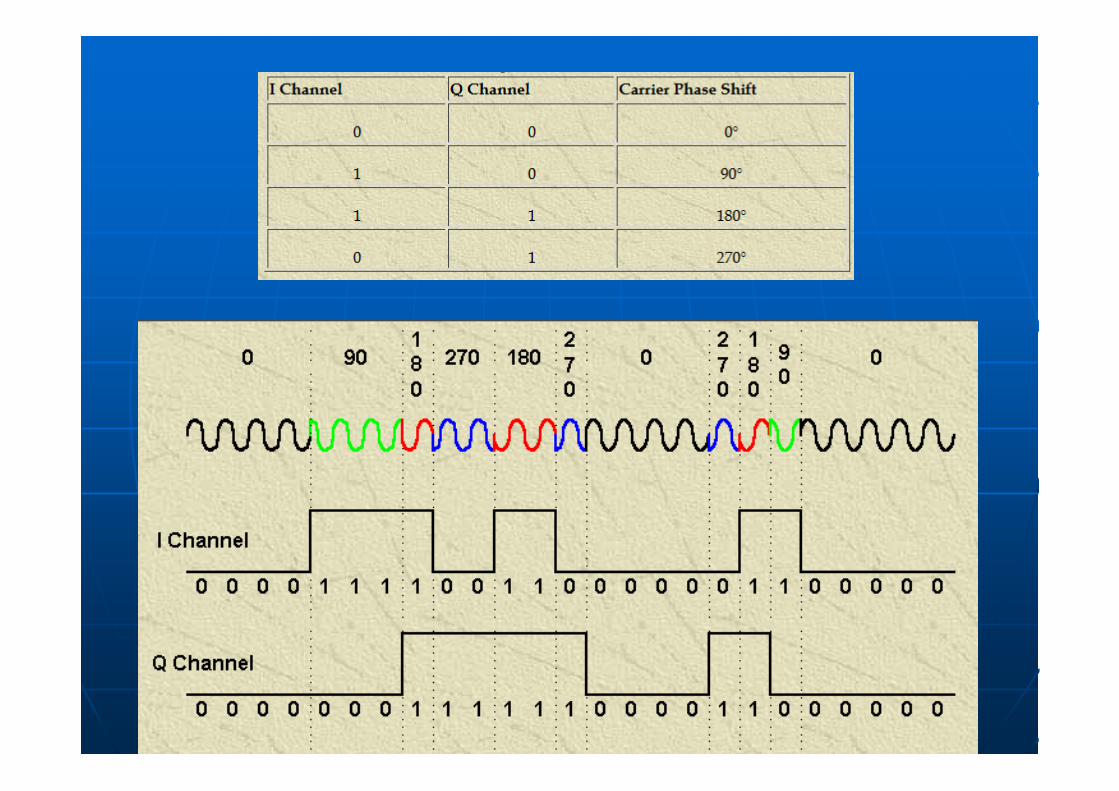
1. Zastosowanie dwóch różnych sygnałów QPSK:Modulacja QPSK (Quadrature Phase Shift Keying).
2. Zastosowanie metody AltBOC przy zwielokrotnianiu Sygnału.
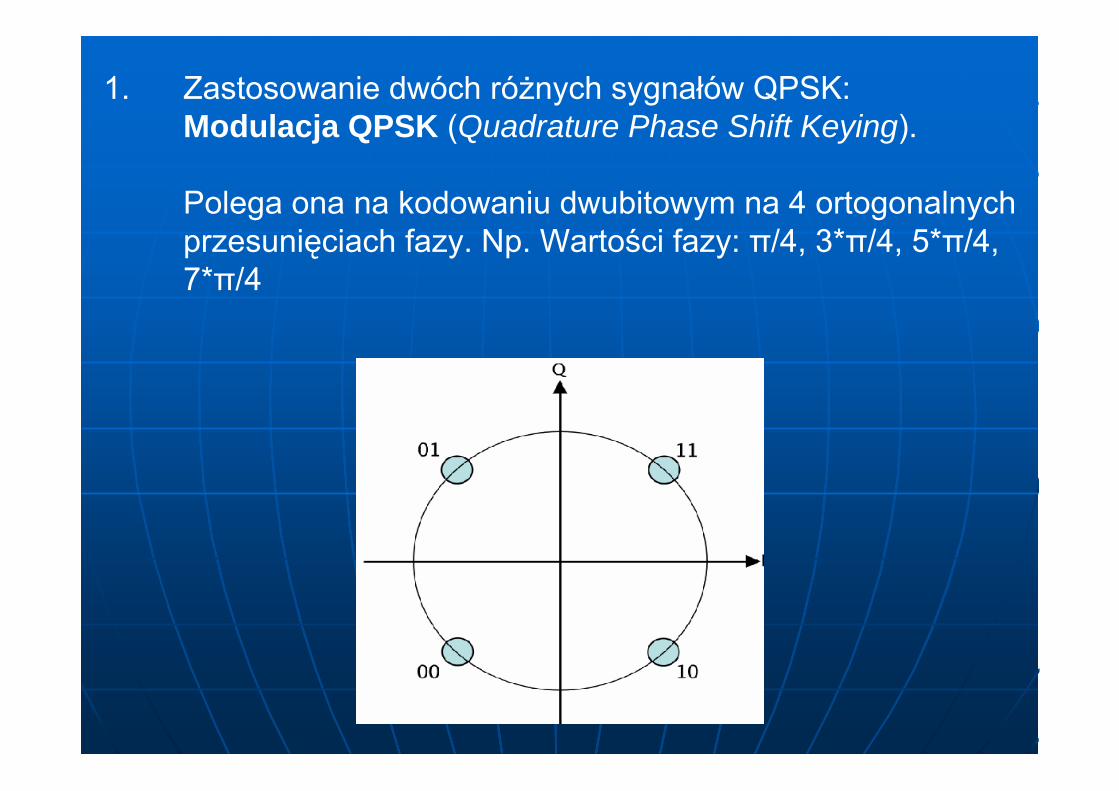
1. Zastosowanie dwóch różnych sygnałów QPSK:Modulacja QPSK (Quadrature Phase Shift Keying).
Polega ona na kodowaniu dwubitowym na 4 ortogonalnych przesunięciach fazy. Np. Wartości fazy: π/4, 3*π/4, 5*π/4, 7*π/4
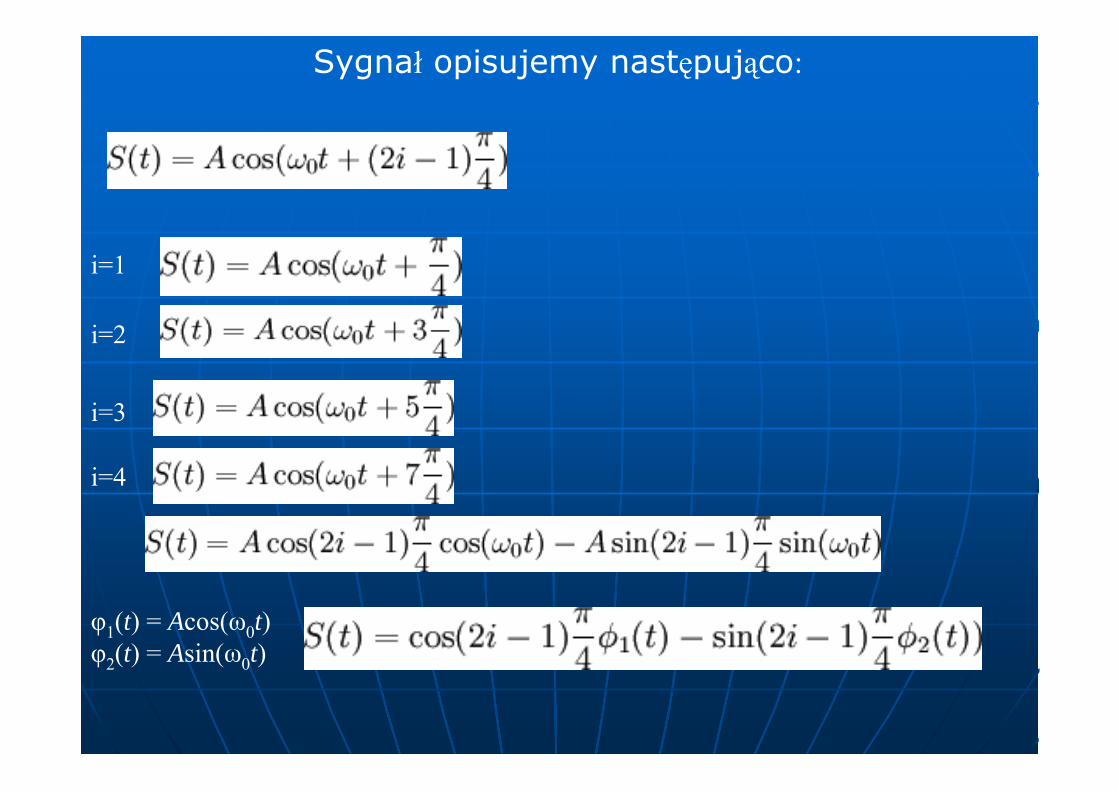
Sygnał opisujemy następująco:
i=1
i=2
i=3
i=4
φ1(t) = Acos(ω0t)φ2(t) = Asin(ω0t)
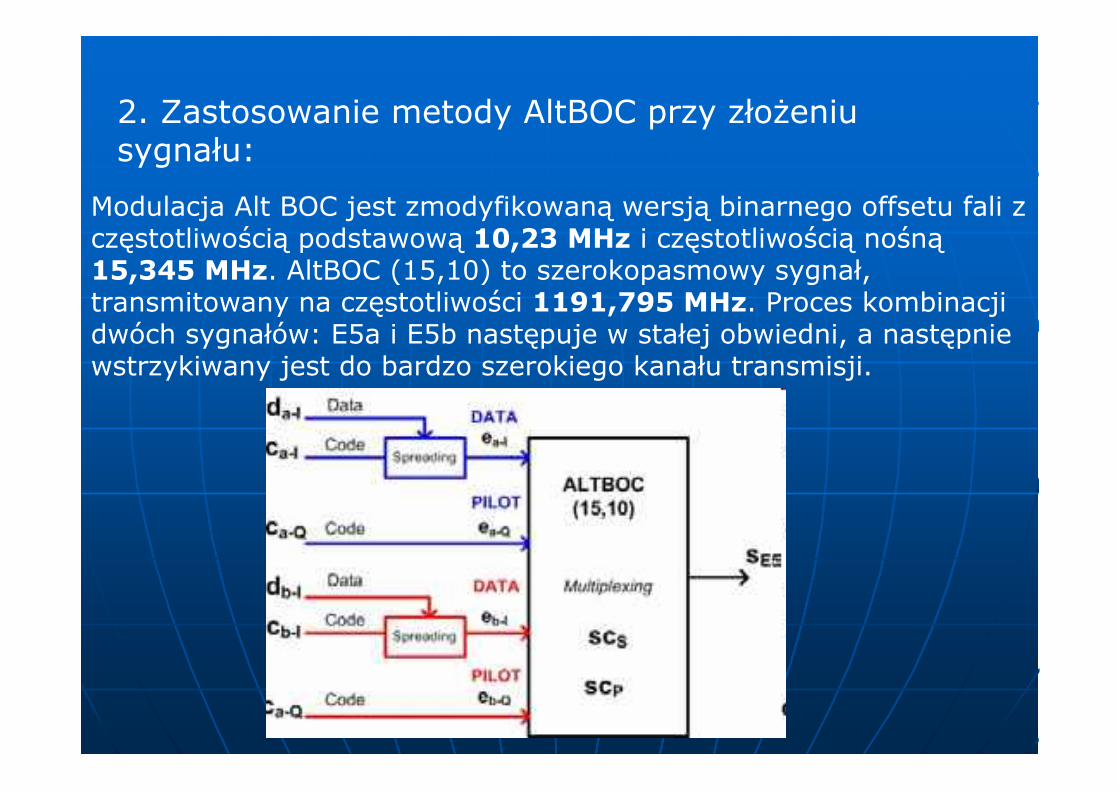
2. Zastosowanie metody AltBOC przy złożeniu sygnału:
Modulacja Alt BOC jest zmodyfikowaną wersją binarnego offsetu fali z częstotliwością podstawową 10,23 MHz i częstotliwością nośną15,345 MHz. AltBOC (15,10) to szerokopasmowy sygnał, transmitowany na częstotliwości 1191,795 MHz. Proces kombinacji dwóch sygnałów: E5a i E5b następuje w stałej obwiedni, a następnie wstrzykiwany jest do bardzo szerokiego kanału transmisji.
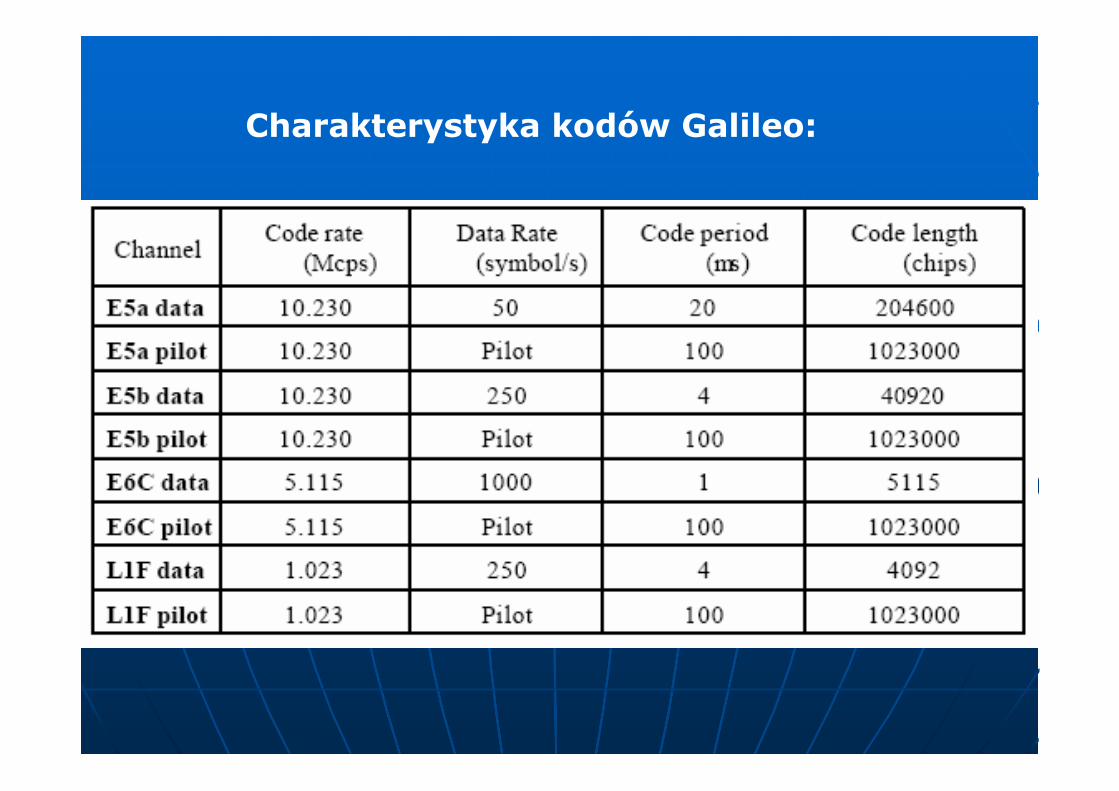
Charakterystyka kodów Galileo:
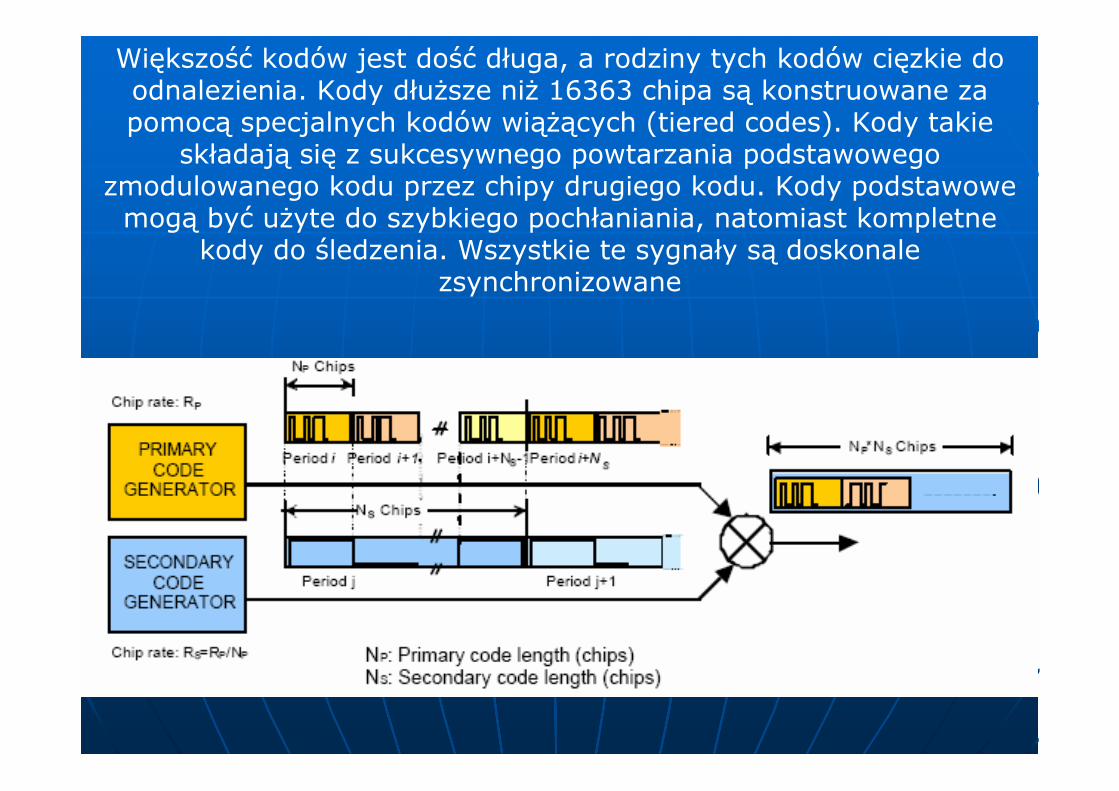
Większość kodów jest dość długa, a rodziny tych kodów cięzkie do odnalezienia. Kody dłuższe niż 16363 chipa są konstruowane za pomocą specjalnych kodów wiążących (tiered codes). Kody takie
składają się z sukcesywnego powtarzania podstawowego zmodulowanego kodu przez chipy drugiego kodu. Kody podstawowe
mogą być użyte do szybkiego pochłaniania, natomiast kompletne kody do śledzenia. Wszystkie te sygnały są doskonale
zsynchronizowane

Kody Gold’a są przykładem kodów podstawowych. Generowane sątechniką LSFR (Linear Feedback Shift Register- Rejestr przesuwający z liniowym sprzężeniem zwrotnym)
Kody Golde’a stanowią sumę modulo 2 dwóch kodów pseudoprzypadkowych o maksymalnej długości, choć same tej długości nie posiadają. Ich szczególnymi cechami, w porównaniu z binarnymi sekwencjami pseudoprzypadkowymi, są:
- powstają z sekwencji binarnych o maksymalnej długości, lecz same takimi nie są;- charakteryzują się łatwością generowania w pętli sprzężenia zwrotnego;- znaczna liczba kombinacji kodowych umożliwia wykorzystanie ich w telekomunikacji
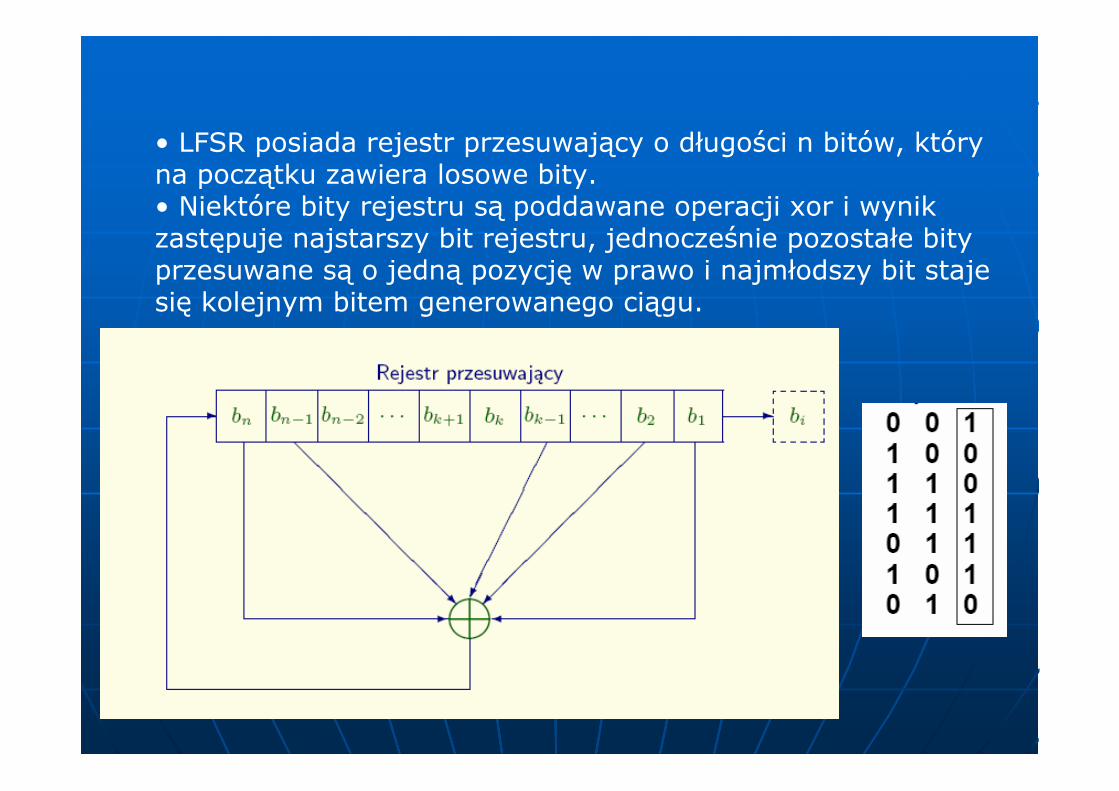
• LFSR posiada rejestr przesuwający o długości n bitów, któryna początku zawiera losowe bity.• Niektóre bity rejestru są poddawane operacji xor i wynikzastępuje najstarszy bit rejestru, jednocześnie pozostałe bityprzesuwane są o jedną pozycję w prawo i najmłodszy bit stajesię kolejnym bitem generowanego ciągu.

Większość kodów drugiego rzędu jest generowana losowo:
Ciągi pseudolosowe to ciągi, które spełniają statystyczne własności ciągów losowych, ale generowane są w sposób
deterministyczny: generator startujący z takiego samego stanu początkowego generuje taki sam ciąg bitów. Ciągi takie
generuje się za pomocą rejestrów przesuwnych ze sprzężeniem zwrotnym. Jak nie trudno zauważyć ciągi pseudoprzypadkowe powtarzają się. Stąd wśród kodów cyklicznych generowanych przez rejestry przesuwne olbrzymie znaczenie mają kody o
najdłuższej sekwencji (kody Gold’a).
Depesza nawigacyjna systemu Galileo stanowi element sygnałowy systemu. Przez to pojęcie należy rozumieć
informację transmitowaną przez satelity Galileo, która po przetworzeniu w odbiorniku umożliwia wyznaczenie pozycji i
czasu, jak również dostarcza szeregu dodatkowych informacji, niezbędnych w prawidłowym funkcjonowaniu systemu. Stanowi
ją zestaw danych, wartości lub znaków przekazywanych w formie binarnej, które po demodulacji podlegają przetworzeniu
przez odbiornik użytkownika.
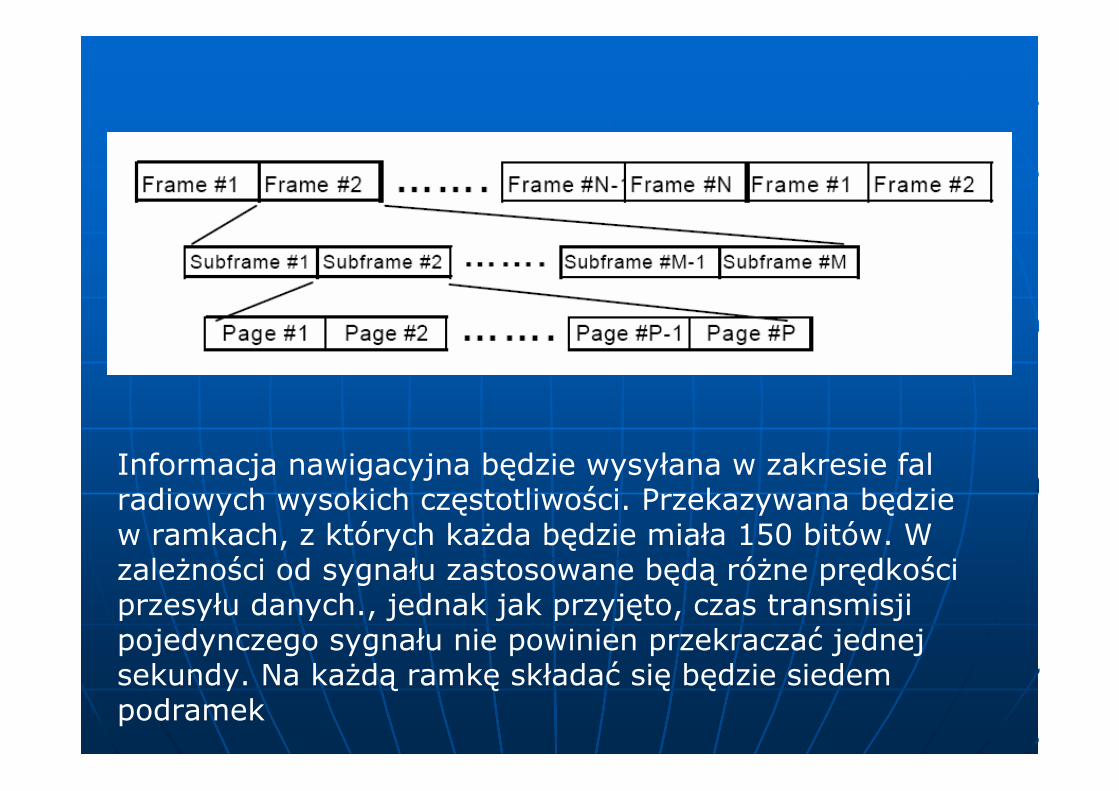
Informacja nawigacyjna będzie wysyłana w zakresie fal radiowych wysokich częstotliwości. Przekazywana będzie w ramkach, z których każda będzie miała 150 bitów. W zależności od sygnału zastosowane będą różne prędkości przesyłu danych., jednak jak przyjęto, czas transmisji pojedynczego sygnału nie powinien przekraczać jednej sekundy. Na każdą ramkę składać się będzie siedem podramek

SYNC- podramka zsynchronizująca• czas trwania 0,04 s;• długość 6 bitów;• używana do określenia granic ramki I bitów przesłanych danych;• raz zidentyfikowana, potwierdza, że synchronizacja nie została
przerwana.
SNF ( Satellite Navigation Frame)- wartość indeksu satelitarnej ramki nawigacyjnej
• czas trwania 0,02 s;• długość 3 bity;• skojarzona z każdą ramką danych;• służy do wyróżnienia przesyłanej informacji nawigacyjnej
Frame ID- podramka identyfikująca• czas trwania 0,04 s;• długość 6 bitów;• określa typ wiadomości przesyłanych w następnej podramce;• umozliwia przesłanie danych w dowolnej kolejności;
Integrity- integralność•zawiera dane uruchamiające alarm w sytuacji, gdy sygnały docierające z satelitów nie spełniają określonych wymogów, wówczas odbiornik użytkownika sam może zablokować sygnały pochodzące od satelitów, których ten alarm dotyczy. •wymogiem jest tutaj jak najmniejsze opóźnienie w odbiorze alarmu
Checksum (suma kontrolna)•podramka służąca do zweryfikowania poprawności nadawanej wiadomości;•długość 27 bitów.
Tail Bits- podramka zamykająca;•- czas trwania 0,04 s;•- sekwencja siedmiu zer.
Depesza nawigacyjna składać się będzie z dwóch zasadniczych części. Pierwszą stanowić będą dane efemerydalne, a drugą almanach.
Efemerydy każdego satelity systemu składać się będą z 17 parametrów:
- 6 elementów orbity Keplera- 6 współczynników harmonicznych- kąt inklinacji orbity- rzędu poprawek LAN (Longitude of the Ascending Node) węzła wstępującego- średnie poprawki ruchu- referencyjny czas efemeryd- dane na moment rozpoczęcia transmisji depeszy IODE , liczące 8 bitów lub parametr IOD (Issue Of Data) liczący 6 bitów i wyżej opisaną ramkę SNF.
Almanach systemu składał się będzie z danych o konfiguracji satelitów, poprawki dla pokładowego wzorca czasowego (16 bitów), poprawki służącej odniesieniu do czasu UTC (104 bity) i korelacji z systemem GPS (72 bity). Dane opisujące konfigurację satelitów to:
- 12 parametrów opisujących każdą z trzech orbit systemu, po cztery dla każdej: pierwiatek kwadratowy dużej półosi elipsy błędów, promień mimośrodu, kąt inklinacji oraz długość geograficzna węzła wstępującego, łącznie 240 bitów;- 3 parametry zawierające argumenty perygeum pierwszego satelity dla każdej orbity; łącznie 72 bity;- 30 parametrów zawierających średnią anomalię dla każdego z 30 satelitów, łącznie 720 bitów.
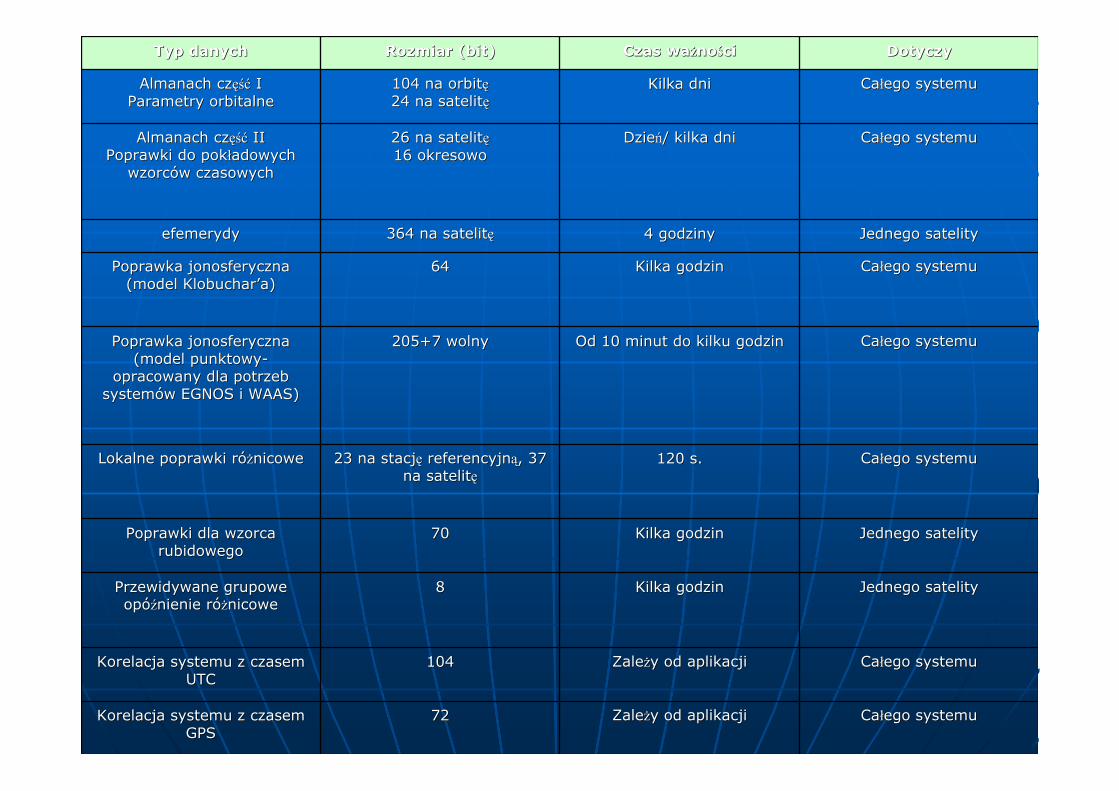
CaCałłego systemuego systemuZaleZależży od aplikacjiy od aplikacji7272Korelacja systemu z czasem Korelacja systemu z czasem GPSGPS
CaCałłego systemuego systemuZaleZależży od aplikacjiy od aplikacji104104Korelacja systemu z czasem Korelacja systemu z czasem UTCUTC
Jednego satelityJednego satelityKilka godzinKilka godzin88Przewidywane grupowe Przewidywane grupowe opopóóźźnienie rnienie róóżżnicowenicowe
Jednego satelityJednego satelityKilka godzinKilka godzin7070Poprawki dla wzorca Poprawki dla wzorca rubidowegorubidowego
CaCałłego systemuego systemu120 s.120 s.23 na stacj23 na stacjęę referencyjnreferencyjnąą, 37 , 37 na satelitna satelitęę
Lokalne poprawki rLokalne poprawki róóżżnicowenicowe
CaCałłego systemuego systemuOd 10 minut do kilku godzinOd 10 minut do kilku godzin205+7 wolny205+7 wolnyPoprawka jonosferyczna Poprawka jonosferyczna (model punktowy(model punktowy--
opracowany dla potrzeb opracowany dla potrzeb systemsystemóów EGNOS i WAAS)w EGNOS i WAAS)
CaCałłego systemuego systemuKilka godzinKilka godzin6464Poprawka jonosferyczna Poprawka jonosferyczna (model Klobuchar(model Klobuchar’’a)a)
Jednego satelityJednego satelity4 godziny4 godziny364 na satelit364 na satelitęęefemerydyefemerydy
CaCałłego systemuego systemuDzieDzieńń/ kilka dni/ kilka dni26 na satelit26 na satelitęę16 okresowo16 okresowo
Almanach czAlmanach częśćęść IIIIPoprawki do pokPoprawki do pokłładowych adowych
wzorcwzorcóów czasowychw czasowych
CaCałłego systemuego systemuKilka dniKilka dni104 na orbit104 na orbitęę24 na satelit24 na satelitęę
Almanach czAlmanach częśćęść IIParametry orbitalneParametry orbitalne
DotyczyDotyczyCzas waCzas ważżnonośściciRozmiar (bit)Rozmiar (bit)Typ danychTyp danych
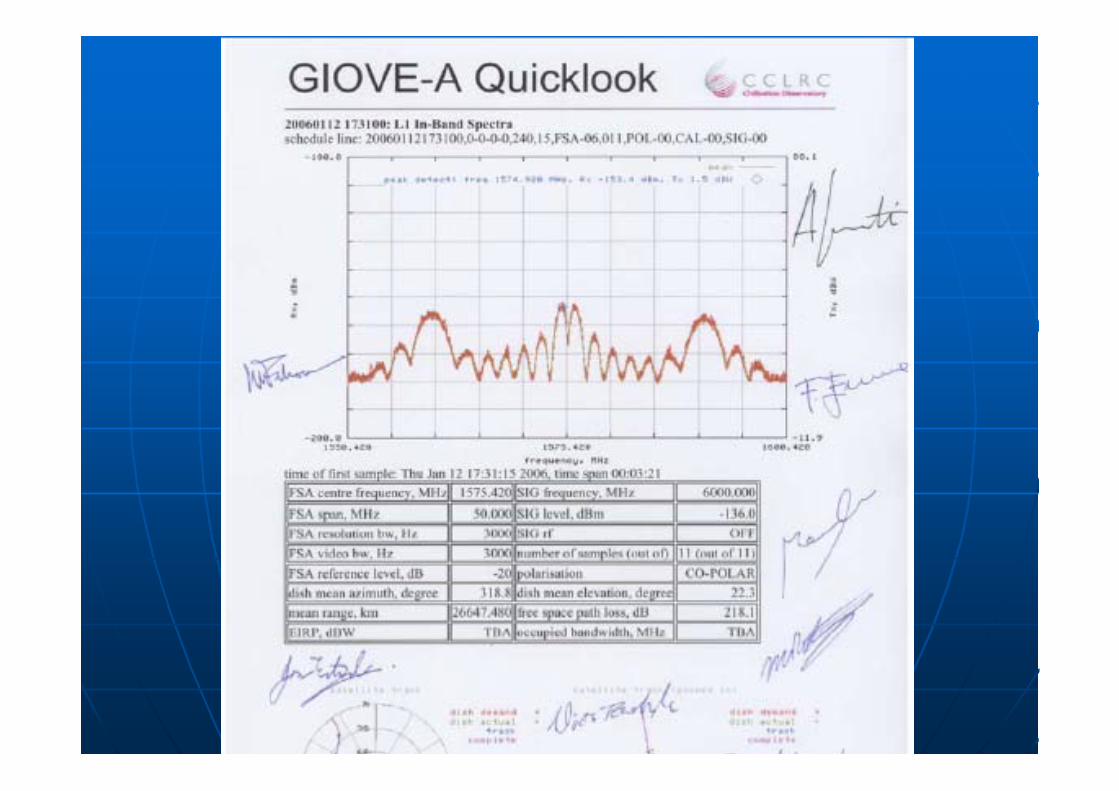
Jak wiemy, budowa systemu Galileo wciJak wiemy, budowa systemu Galileo wciążąż sisięęopopóóźźnia. Wynika to z wielu przyczyn. Jednaknia. Wynika to z wielu przyczyn. Jednakżże e Galileo poszczyciGalileo poszczycićć sisięę momożże dwoma satelitami e dwoma satelitami krkrążąążącymi po jego orbitach. Pierwszy z nich cymi po jego orbitach. Pierwszy z nich wystrzelony, 22 lutego 2006 roku wystrzelony, 22 lutego 2006 roku GioveGiove-- A, A, wkrwkróótce btce bęędzie miadzie miałł swoje trzecie urodziny, swoje trzecie urodziny, drugi z nich drugi z nich GioveGiove-- B wyniesiony zostaB wyniesiony zostałł na na orbitorbitęę w zeszw zeszłłym roku, dnia 27 kwietnia. ym roku, dnia 27 kwietnia. Satelity transmitujSatelity transmitująą jujużż sygnasygnałły. y.
GioveGiove--AA
PodsumowujPodsumowująąc trzyletnic trzyletniąą pracpracęę GioveGiove A A momożżemy zestawiemy zestawićć nastnastęępujpująące dane:ce dane:
-- operacyjnooperacyjnośćść L1L1--E5 podczas 3 lat E5 podczas 3 lat wynosi 65,3%wynosi 65,3%
-- operacyjnosoperacyjnosćć L1L1--E6 wynosi 24.3 %E6 wynosi 24.3 %-- operacyjnooperacyjnośćść innych to 2.4%innych to 2.4%-- okres bez transmisji okres bez transmisji żżadnego sygnaadnego sygnałłu u
to zaledwie 8% w skali 3 lat.to zaledwie 8% w skali 3 lat.
GioveGiove--BBWielkim sukcesem okazaWielkim sukcesem okazałło sio sięę wystrzelenie wystrzelenie GioveGiove--BB, kt, któóry jako pierwszy zaczry jako pierwszy zacząłął transmitowatransmitowaććGPSGPS--GalileoGalileo sygnasygnałły, uy, użżywajywająąc do tego c do tego zoptymalizowanej MBOCzoptymalizowanej MBOC-- MultiplexedMultiplexed BinaryBinaryOffset Offset CarrierCarrier. . 7 Maja uda7 Maja udałło sio sięę odebraodebraćć sygnasygnałły wysy wysłłane z ane z GioveGiove--BB. . JakoJakośćść sygnasygnałłu nadawanego z satelity u nadawanego z satelity bbęędzie miadzie miałła wielki wpa wielki wpłływ na dokyw na dokłładnoadnośćśćpozycjonowania. Obecnie sygnapozycjonowania. Obecnie sygnałł jest poddany jest poddany analizie. analizie.
Plan częstotliwości i sygnałów Galileo zostałsfinalizowany, pozostaje już tylko czekać na jego realizację i ostatecznie wdrożyć teorię w praktykę.






![Modulacje cyfrowe - zastosowaniastaff.elka.pw.edu.pl/~jfalkiew/pdfy/w9_tsim.pdf · Przepustowość łącza (szybkość przesyłania danych): Rb = 1 Tb [bit/s] Przykład: modulacja](https://static.fdocuments.pl/doc/165x107/5c77b81009d3f2c43b8c5d87/modulacje-cyfrowe-jfalkiewpdfyw9tsimpdf-przepustowosc-lacza-szybkosc.jpg)