KONCEPCJA OPTYMALIZACJI WASNOCI JEZDNYCH … · Koncepcja optymalizacji wasnoci jezdnych platformy...
12
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 71 Transport 2009 Zbigniew Seta Politechnika Radomska Wydzia Transportu i Elektrotechniki Instytut Automatyki i Telematyki Rkopis dostarczono, grudzie 2008 KONCEPCJA OPTYMALIZACJI WASNOCI JEZDNYCH PLATFORMY ROBOTA MOBILNEGO Streszczenie: W artykule zwrócono uwag na konieczno poprawy wasnoci jezdnych platformy robota mobilnego, zbudowanej na bazie podwozia koowego. Skupiono si na zagadnieniu przechyów tego podwozia przy pokonywaniu przeszkody. Wskazano na problemy wynikajce z przemieszczania si takiego pojazdu w trudnym terenie, oraz w zwizku z tym, na jako wykonania przez pojazd wyznaczonego zadania. Uzasadniono ograniczenia dotyczce kryterium jakoci w optymalizacji wasnoci jezdnych platform mobilnych. Dokonano analizy teoretycznej ruchu koa pneumatycznego po utwardzonym podou. Przedstawiono konstrukcj eksperymentalnej platformy mobilnej, której uyto do bada. Opisano przeprowadzone na tym etapie badania eksperymentalne, których celem byo okrelenie moliwoci praktycznej realizacji przyjtej koncepcji optymalizacji wasnoci jezdnych. Sowa kluczowe: robot mobilny, platforma mobilna, sterowanie i optymalizacja, waciwoci jezdne 1. WPROWADZENIE Analiza przypadków poruszania si rónych platform robotów mobilnych w trudnym terenie daje informacj o ich zdolnociach do pokonywania rónorodnych przeszkód. Ma to due znaczenie np. w przypadku pojazdów przeznaczonych do dziaa w ekstremalnie trudnym rodowisku (pojazdy wojskowe, ratownicze czy coraz czciej spotykane pojazdy specjalne – roboty mobilne lub bezzaogowe platformy wspierajce dziaania operatora). Badajc zakres przemieszczania si platformy mobilnej w terenie mona wzi pod uwag nastpujce kryteria oceny: zdolno do pokonywania przeszkód z punktu widzenia ich geometrii (kamienie, drzewa, rowy, zagbienia, itp.); zdolno do pokonywania terenu pod ktem waciwoci gruntu (piasek, wir, boto, czarnoziem, torf, itp.); zdolno do realizacji naznaczonego zadania operacyjnego bez wzgldu na istniejce utrudnienia rodowiskowe.
Transcript of KONCEPCJA OPTYMALIZACJI WASNOCI JEZDNYCH … · Koncepcja optymalizacji wasnoci jezdnych platformy...
-
P R A C E N A U K O W E P O L I T E C H N I K I W A R S Z A W S K I E J z. 71 Transport 2009
Zbigniew Seta
Politechnika Radomska Wydzia� Transportu i Elektrotechniki
Instytut Automatyki i Telematyki
R�kopis dostarczono, grudzie� 2008
KONCEPCJA OPTYMALIZACJI W�ASNO�CI JEZDNYCH PLATFORMY ROBOTA MOBILNEGO
Streszczenie: W artykule zwrócono uwag� na konieczno� poprawy w�asno�ci jezdnych platformy robota mobilnego, zbudowanej na bazie podwozia ko�owego. Skupiono si� na zagadnieniu przechy�ów tego podwozia przy pokonywaniu przeszkody. Wskazano na problemy wynikaj�ce z przemieszczania si� takiego pojazdu w trudnym terenie, oraz w zwi�zku z tym, na jako� wykonania przez pojazd wyznaczonego zadania. Uzasadniono ograniczenia dotycz�ce kryterium jako�ci w optymalizacji w�asno�ci jezdnych platform mobilnych. Dokonano analizy teoretycznej ruchu ko�a pneumatycznego po utwardzonym pod�o�u. Przedstawiono konstrukcj� eksperymentalnej platformy mobilnej, której u�yto do bada�. Opisano przeprowadzone na tym etapie badania eksperymentalne, których celem by�o okre�lenie mo�liwo�ci praktycznej realizacji przyj�tej koncepcji optymalizacji w�asno�ci jezdnych. S�owa kluczowe: robot mobilny, platforma mobilna, sterowanie i optymalizacja, w�a�ciwo�ci jezdne
1. WPROWADZENIE
Analiza przypadków poruszania si� ró�nych platform robotów mobilnych w trudnym terenie daje informacj� o ich zdolno�ciach do pokonywania ró�norodnych przeszkód. Ma to du�e znaczenie np. w przypadku pojazdów przeznaczonych do dzia�a� w ekstremalnie trudnym �rodowisku (pojazdy wojskowe, ratownicze czy coraz cz��ciej spotykane pojazdy specjalne – roboty mobilne lub bezza�ogowe platformy wspieraj�ce dzia�ania operatora). Badaj�c zakres przemieszczania si� platformy mobilnej w terenie mo�na wzi� pod uwag� nast�puj�ce kryteria oceny:
� zdolno� do pokonywania przeszkód z punktu widzenia ich geometrii (kamienie, drzewa, rowy, zag��bienia, itp.);
� zdolno� do pokonywania terenu pod k�tem w�a�ciwo�ci gruntu (piasek, �wir, b�oto, czarnoziem, torf, itp.);
� zdolno� do realizacji naznaczonego zadania operacyjnego bez wzgl�du na istniej�ce utrudnienia �rodowiskowe.
-
222 Zbigniew Seta
Testy poligonowe opracowanego ju� prototypu podwozia mobilnego okre�laj� zazwyczaj zasadno� przyj�tej koncepcji konstrukcyjnej. W zakresie bada� zdolno�ci terenowych pojazdów wojskowych testy „sprawno�ciowe” przeprowadza si� wed�ug wymaga� odpowiednich norm [10], natomiast w zakresie podobnych bada� ale dla innych pojazdów, np. robotów mobilnych problematyka ta nie jest jednoznacznie rozwi�zana.
Jak pokazuje póniejsza praktyka nie wszystkie przetestowane konstrukcje podwozi mobilnych s� w stanie pokona zastane �rodowisko, w którym s� docelowo wykorzystywane. Wydaje si�, �e przyczyn� takiego stanu rzeczy jest to, i� w znacznej cz��ci wniosków wyp�ywaj�cych z testów poligonowych mo�e nie by uwzgl�dniana w analizie poprawka zwi�zana ze zmian� charakterystyki pierwotnego pod�o�a, po którym testowany pojazd si� porusza (poligon do�wiadczalny wyeksploatowany na skutek wielokrotnych testów ró�nych pojazdów – czyli np. grunt mocno utwardzony zamiast naturalnego, np. zaoranego pola, które mia�o pierwotnie pos�u�y do analizy poruszania si� pojazdu w trudnym terenie).
Bior�c powy�sze pod uwag� i wskazuj�c na cel bada� nad nowymi rozwi�zaniami uk�adów podwozi mobilnych zaproponowano w�asn� koncepcj� optymalizacji w�asno�ci jezdnych platformy dla robota mobilnego. Zaproponowana koncepcja optymalizacji polega na odpowiedniej dynamicznej modyfikacji wspó�czynnika spr��ysto�ci opony pneumatycznej ko�a podczas ruchu robota w terenie. Badania eksperymentalne niezb�dne na tym etapie realizacji pracy sprowadzono do ruchu odpowiednio skonstruowanej platformy mobilnej po powierzchni p�askiej z umieszczon� przeszkod� pionow� o odpowiednim kszta�cie i wysoko�ci, dostosowanej do wymiarów kó� i ogumienia. Platforma mobilna zosta�a zrealizowana jako pierwszy etap prac nad konstrukcj� podwozia do budowanego robota mobilnego.
2. ZAGADNIENIE RUCHU POJAZDU MOBILNEGO W
TERENIE Testy poligonowe, o których by�a ju� mowa pomimo realizacji procedur testuj�cych
wed�ug odpowiednich norm, realizowane s� najcz��ciej „pod u�ytkownika”, który stawia okre�lone wymagania co do sposobu u�ytkowania przez niego pojazdu. U�ytkownikami pojazdów mobilnych, które realizuj� zadania w trudnym terenie s� najcz��ciej: wojsko, policja, stra� lub inne s�u�by.
Nale�y zaznaczy, �e w opracowanym ju� i przetestowanym docelowym podwoziu zakres modyfikacji parametrów jezdnych przez u�ytkownika jest ju� z regu�y niewielki. W konkretnym zadaniu przy za�o�eniu, �e rzeba i rodzaj terenu by�y rozpoznane wcze�niej (np. poprzez wojskowy wywiad terenowy) wprowadzi mo�na ju� tylko dostosowanie kó� (opon) pojazdu do terenu, lub cz��ciow� modyfikacj� parametrów zawieszenia (resory, spr��yny, amortyzatory, itp.). W terenie przypadkowym (niezdeterminowanym) skuteczno� realizacji zada� przez pojazd mobilny z wcze�niej ustalonymi parametrami podwozia mo�e by problematyczna. Wcze�niej dobrane ko�a lub opony sprawdz� si� w danym terenie, a w innym ju� nie – pojazd w najlepszym przypadku zdo�a si� wycofa lub
-
Koncepcja optymalizacji w�asno�ci jezdnych platformy robota mobilnego 223
omin� zbyt trudny teren. Jest tak, gdy� ró�norodno� funkcji spe�nianych przez ogumienie powoduje, �e jego dobór jest wynikiem kompromisu mi�dzy wieloma wymaganiami, dotycz�cymi zarówno realizacji zadania jak i p�ynno�ci ruchu.
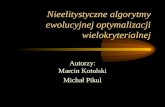
Dla przyk�adu rys. 1 pokazuje dwa przypadki pokonywania terenu o ró�nych w�a�ciwo�ciach przez eksperymentaln� platform� ko�ow� o osiach nieresorowanych, zbudowan� przez autora na potrzeby bada� eksperymentalnych. Rysunek 1a pokazuje pokonywanie wy��obienia terenu w postaci poprzecznego rowu, za� rys. 1b pokonywanie drogi, na której umieszczono drewniany klocek.
Nale�y zaznaczy, �e w przypadkach, w których nie jest to wymagane zagadnienie przemieszcze� poprzecznych p�aszczyzny platformy (np. wskutek najechania na przeszkod� pionow� – jak na rys. 1b) nie musi by brane pod uwag� – podwozie mobilne pokona przeszkod� i b�dzie kontynuowa�o swój ruch dalej. W innych przypadkach, tzn. wsz�dzie tam, gdzie celem np. robota policyjnego jest wykonanie okre�lonego zadania w ograniczonej przestrzeni z du�� precyzj� (np. w zbyt w�skim korytarzu budynku, wykluczaj�cym pole manewru pojazdem), przechy� platformy w p�aszczynie poprzecznej mo�e uniemo�liwi lub utrudni realizacj� „powierzonego” zadania. Przypadek taki ilustruje schematycznie rys. 2.
Rys. 1. Poruszanie si� eksperymentalnej platformy ko�owej w trudnym terenie:
a) przejazd przez wy��obienie terenu, b) przejazd przez klocek drewniany
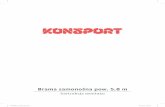
Rys. 2. Zadanie precyzyjnego umieszczania przedmiotu przez manipulator robota mobilnego:
a) ruch platformy mobilnej w terenie bez przeszkody, b) najechanie na przeszkod�
a) b)
OK.! ! NO.!
a) b)
-
224 Zbigniew Seta
Analizuj�c rys. 2 wida, �e ka�dorazowo próba umieszczenia okre�lonego przedmiotu (np. �adunku wybuchowego) przez manipulator robota policyjnego poruszaj�cego si� po terenie p�askim ko�czy si� powodzeniem (rys. 2a). W przypadku najechania ko�a platformy na przeszkod� (rys. 2b) umieszczenie przedmiotu w otworze jest ju� niemo�liwe (tutaj ruch ramienia manipulatora w kierunku dó� jest ograniczony, gdy� wynika to z przyj�tej konstrukcji robota).
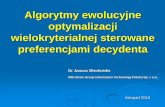
Cz��ciowym rozwi�zaniem problemów zwi�zanych z poruszaniem si� pojazdów mobilnych ma�ogabarytowych w trudnym terenie jest oparcie ich podwozia na odpowiednio zaawansowanej konstrukcyjnie tzw. platformie wielocz�onowej. Ilustruje to rysunek 3, pokazuj�cy jednocze�nie cechy w tym zakresie robota bojowego o oznaczeniu IBIS[13].
Rys. 3. Pokonywanie przeszkód przez robot bojowy IBIS
Nap�dzana w�asnym nap�dem przednia o� kó� platformy robota IBIS mo�e skr�ca si� osiowo w p�aszczynie pod�u�nej platformy. Najechanie na przeszkod� (np. kamienie, grudy ziemi, itp. – rys. 3) powoduje obrót osi kó� przednich przy zachowaniu pierwotnego wychylenia ca�o�ci platformy. Uchwycony (domy�lny) przedmiot mo�e „odbywa” drog� w ustalonej wcze�niej p�aszczynie ruchu platformy.
Dok�adna analiza spotykanych konstrukcji platform ko�owych oraz poruszania si� ich w trudnym terenie pozwala stwierdzi, �e spotykane najcz��ciej rozwi�zania nie gwarantuj� nale�ytej adaptacji podwozia pojazdu do napotkanych warunków jazdy. Poprzedzony wywiadem terenowym dobór kó� lub nastrojenie zawieszenia nie gwarantuje optymalnych cech platformy do danego terenu. Na przyk�ad przy najcz��ciej spotykanym w�ród platform robotów mobilnych zawieszeniu osi kó� sztywnym nieresorowanym (ze wzgl�du na ograniczone miejsce zabudowy), najazd platformy na przeszkod� wykluczy mo�e realizacj� zadania (rys. 2b). Jak pokazano na rys. 3 pewnym rozwi�zaniem mo�e by platforma wielocz�onowa. Jednak bior�c pod uwag� z�o�ono� jej konstrukcji rozpowszechnienie tego typu rozwi�za� na tle innych b�dzie zarezerwowane tylko dla pojazdów do unikalnych zastosowa�.
-
Koncepcja optymalizacji w�asno�ci jezdnych platformy robota mobilnego 225
3. ZAGADNIENIA TEORETYCZNE
Realizacja zawieszenia platformy ko�owej zawsze w sposób optymalny do charakteru pokonywania terenu jest mo�liwa tylko przy za�o�eniu, i� b�dzie mo�na wp�ywa w sposób zmienny w czasie na charakterystyk� elementów zawieszenia. Mo�na to zrealizowa poprzez zastosowanie uk�adu automatycznej regulacji (UAR) o cechach sterowania mikroprocesorowego. Na wej�cia UAR wprowadza nale�y sygna�y charakteryzuj�ce profil terenu, za� realizacja algorytmu sterowania wyzwoli powinna sygna�y doprowadzone do tzw. si�owników zawieszenia, które „przestroj�” elementy takie jak amortyzatory czy miechy pneumatyczne. Jako� procesu sterowania zale�a�a b�dzie mi�dzy innymi od szybko�ci zastosowanego mikrokomputera oraz wbudowanego do niego algorytmu. Wyja�nia to rys. 4.
Rys. 4. Idea optymalnego sterowania zawieszeniem pojazdu mobilnego:
„odczytanie” sygna�u o przeszkodzie spowodowa�o zmian� po�o�enia osi ko�a
W przypadkach, w których wyst�powa�by ograniczony obszar eksploatacji platformy mo�na by przyj�, �e w�a�ciwy dobór opony ko�a zapewnia�by konstrukcj� podwozia zbli�on� do optymalnej. Funkcja kryterialna warunkuj�ca poprawny dobór opony dla kó� platformy powinna by wtedy okre�lona uwzgl�dniaj�c nast�puj�ce wskaniki:
� warto�ci maksymalnych ugi� ogumienia, obserwowane podczas pokonywania przeszkód (nierówno�ci) o zadanym profilu;
� prawdopodobie�stwo utraty kontaktu ko�a z nawierzchni� drogi; � amplitudy przechy�ów nadwozia i zmiany reakcji normalnych na ko�ach; � odchylenie standardowe ugi� ogumienia.
Ograniczenia na�o�one na ruch platformy w celu spe�nienia m.in. kryterium prostoliniowego ruchu w terenie mo�na by wtedy opisa za pomoc� nast�puj�cych relacji[5]:
,])([
,])([,25,0
25,0
,
,
DOPDOP
DOPKsK
DOPDOPXX
sDOPYY
ptpp
pytyppxy
HH
��
HH
����
�K�
����
��
��
(1)
gdzie:
OK.!
przeszkoda
UK�AD STEROWNIKA
OPTYMALNEGO:
Al t
Sygna�y o otoczeniu: rozpoznana przeszkoda
Sygna�y steruj�ce si�ownikami zawieszenia
-
226 Zbigniew Seta
ys - statyczne ugi�cie ogumienia; DOPx - dopuszczalne ugi�cie zawieszenia; y(t), H(t) - ugi�cie ogumienia i k�t poprzecznego przechy�u platformy; �Y, �X - odchylenia standardowe ugi� ogumienia i zawieszenia; p� K - prawdopodobie�stwo utraty styku kó� z drog�; pH - prawdopodobie�stwo nadmiernego przechy�u platformy.
Przyjmuj�c, �e rozpatrujemy ruch platformy ko�owej wyposa�onej w osie sztywne nieresorowane, poruszaj�cej si� z niewielk� pr�dko�ci�, oraz zak�adaj�c zerow� podatno� konstrukcji platformy na odkszta�cenia w pokonywanym terenie, mo�na nie rozpatrywa cz��ci ogranicze� zwi�zanych z ugi�ciem zawieszenia, czyli xDOP, �X oraz prawdopodobie�stwa p� K i pH i wyrugowa je z zale�no�ci (1). Ko�cowa funkcja kryterialna b�dzie wtedy uzale�niona od charakterystyki zastosowanej w kole opony. Przyj�to zatem, �e nale�y rozwa�y zachowanie si� ko�a pneumatycznego (opony gumowej) podczas ruchu po pod�o�u jako elementu podwozia platformy, którego charakterystyk� b�dzie mo�na zmienia w trakcie ruchu platformy po pod�o�u.
Do analizy przyj�to zatem przypadek toczenia si� odkszta�calnej opony nie obci��onej si�ami poprzecznymi a obci��onej tylko si�� pionow�, wynikaj�c� z masy platformy. Przyj�to dalej, �e ko�o pneumatyczne toczy si� z niewielk� pr�dko�ci� k�tow�. Ostatnie za�o�enie pozwoli�o wyeliminowa z przeprowadzanej analizy rozwa�anie przypadków drga� platformy pod wp�ywem najechania na przeszkod�, oraz pomin� rozpatrywanie t�umienia wewn�trznego opony.
Najechanie ko�a na przeszkod� powoduje powstanie si� reakcji pod�o�a. Opona pneumatyczna, b�d�ca elementem podatnym przenosi si�y reakcji pod�o�a na pozosta�e elementy podwozia. Poniewa� spr��ysto� opony jest funkcj� zarówno sk�adowej si�y pionowej reakcji pod�o�a dzia�aj�cej na ko�o Fz jak i ugi�cia materia�u opony pod jej wp�ywem, wyrazi to mo�na za po�rednictwem podstawowej zale�no�ci opisuj�cej elementy spr��yste[2]:
$ % � m/NddFk zo �
� � (2)
gdzie: � - ugi�cie opony; ko - wspó�czynnik spr��ysto�ci uwzgl�dniaj�cy materia� opony i ci�nienie w kole. Przyjmuj�c, �e modu� si�y pionowej Fz jest równy co do warto�ci sile nacisku promieniowego na opon� Gk otrzymujemy zale�no� na odkszta�calno� promieniow� opony w postaci[7]:
hChCGF kz G�G�� 22
1 (3) gdzie: C1(p), C2(p) - wspó�czynniki zale�ne od ci�nienia p w kole; wspó�czynniki te mo�na
wyznaczy z krzywych odzwierciedlaj�cych zale�no�ci h = F(Gk) oraz h=f(p);
h - ró�nica pomi�dzy promieniem ko�a nieobci��onego Ro a promieniem dynamicznym Rs po obci��eniu ko�a si�� Gk. (ilustruje to rys. 5).
-
Koncepcja optymalizacji w�asno�ci jezdnych platformy robota mobilnego 227
Rys. 5. Ilustracja ugi�cia opony pod wp�ywem si�y promieniowej Gk
Nale�y zaznaczy, �e opon� mo�emy scharakteryzowa równie� za pomoc� tzw. �redniej sta�ej spr��ysto�ci C�r, która jest funkcj� wspó�czynników C1 i C2. �rednia sta�a spr��ysto�ci C�r jest wielko�ci� zmienn� i zale�y od ci�nienia w oponie. Statyczny zakres zmian C�r mo�na okre�li przy zdejmowaniu charakterystyk opony. Rysunek 6 pokazuje eksperymentalnie okre�lon� zale�no� ugi�cia samochodowej opony radialnej 205/65R15 firmy Vrestein od ci�nienia w oponie p przy sta�ej warto�ci si�y Gk. Pomiary wykonano przy upuszczaniu ci�nienia z opony (przebieg 1) i podczas pompowania ogumienia (przebieg 2).
Rys. 6. Charakterystyka ugi�cia opony h od ci�nienia p: 1 – upuszczanie powietrza, 2 – pompowanie opony
Poniewa� charakterystyka spr��ysto�ci opony zwi�zana jest m.in. z warto�ci� ci�nienia
w kole, do równania (3) nale�y wprowadzi tzw. wspó�czynnik koryguj�cy. Równanie to wed�ug Knoroza przyjmuje wtedy posta[7]:
hChCGF kz G�G�� 22
132 (4)
Ci�nienie [bar]
Ugi�cie [cm]
1
2
Gk=const
-
228 Zbigniew Seta
Po przekszta�ceniu zale�no�ci (4) równanie definiuj�ce C�r jest nast�puj�ce :
2132 ChCC�r �G� (5)
Poniewa� wspó�czynniki C1 i C2 zale�� od ci�nienia p w oponie, ko�cow� posta sta�ej spr��ysto�ci opony mo�emy wyrazi nast�puj�co[7]:
dh
dGC kpr � (6)
Zale�no�ci (6) i (2) s� to�same. Modyfikuj�c ci�nienie p w oponie podczas ruchu ko�a
pneumatycznego po pod�o�u (za po�rednictwem odpowiedniego uk�adu wykonawczego) wp�ywamy na warto� h osi�gaj�c tym samym zmian� charakterystyki wspó�czynnika spr��ysto�ci opony ko podczas ruchu pojazdu. Uwzgl�dnienie tego faktu stanowi pod�o�e do dalszych bada� nad konstrukcj� i optymalizacj� dynamiczn� zawieszenia dla pojazdu mobilnego poruszaj�cego si� w �rodowisku niezdeterminowanym.
4. PROTOTYP EKSPERYMENTALNEJ PLATFORMY MOBILNEJ
G�ównym za�o�eniem konstrukcyjnym by�o dostosowanie platformy do poruszania si� (docelowo) w trudnym terenie z mo�liwo�ci� przenoszenia przez p�aszczyzn� platformy du�ych nacisków, a przez ko�a du�ych obci��e� promieniowych. Przyj�to, �e wielko� powierzchni p�aszczyzny powinna by taka, by umo�liwi w przysz�o�ci zamontowanie dodatkowych urz�dze� mechatronicznych.
Konstrukcja mechaniczna platformy oparta zosta�a na metalowej ramie - kratownicy, wykonanej z p�askownika 50 x 5 mm o wymiarach: 400 x 600 mm. Do ramy w odpowiedni sposób umocowano dwie osie nie nap�dzane z ko�ami pneumatycznymi. Zastosowano przy tym �o�yska �lizgowe (panewki).
Wed�ug przyj�tych za�o�e� jednym z elementów bada� eksperymentalnych mia�a by dynamiczna zmiana wspó�czynnika spr��ysto�ci opony pneumatycznej ko poprzez modyfikacj� warto�ci ci�nienia p w kole platformy. Poniewa� warto� wspó�czynnika ko zale�na jest równie� od struktury materia�u opony przyj�to, �e w�a�ciw� do eksperymentów b�dzie taka, której stosunek szeroko�ci opony do jej wysoko�ci b�dzie jak najmniejszy. Innymi s�owy wspó�czynnik ko w du�ym przybli�eniu powinien zale�e tylko od bie��cego ci�nienia p w kole platformy. Rodzaj wybranej opony platformy ilustruje rys. 7.
-
Koncepcja optymalizacji w�asno�ci jezdnych platformy robota mobilnego 229
Rys. 7. Opona ko�a eksperymentalnej platformy
Na podstawie powy�szego dobrano opony o wymiarach: 3.40 x 10, które mo�na napompowa do ci�nienia roboczego 2,5 bara.
Dla realizacji bada� nad koncepcj� dynamicznego kszta�towania wspó�czynnika spr��ysto�ci opony wed�ug zale�no�ci (6) i (2) opracowano prototypowy uk�ad wykonawczy do sterowania pneumatycznego pompowaniem / upuszczaniem powietrza dla pojedynczego ko�a ogumionego platformy. Rysunek 8 ilustruje schemat ideowy tego rozwi�zania.
Rys. 8. Uk�ad sterowania pneumatycznego dla pojedynczego ko�a platformy ko�owej
Nale�y zaznaczy, �e pewna trudno� realizacji praktycznej sterowania pneumatycznego z rys. 8 polega�a na tym, �e za�o�ono zmian� ci�nienia w kole w sposób dynamiczny, tzn. podczas obracania si� ko�a w terenie pokonywanym przez platform�. Problemy wynikaj�ce z tego faktu na tym etapie bada� pomini�to, poniewa� ruch platformy podczas bada� eksperymentalnych ograniczono do krótkiego dystansu. (Konstrukcj� piasty pneumatycznej, która wyeliminuje powy�sze trudno�ci pozostawiono na dalszy etap realizacji pracy badawczej). Zagadnienie trwa�ego dostarczenia ci�nienia ze spr��arki do zaworu (wentyla) opony pneumatycznej (poprzez zacisk 1 zaworu Z2)
-
230 Zbigniew Seta
rozwi�zano poprzez zastosowanie pneumatycznego w��a elastycznego typu PE J8mm. W docelowym rozwi�zaniu platformy planuje si� wykorzystanie m.in. zbiorniczka ci�nieniowego na spr��one powietrze oraz spr��arki ma�ogabarytowej, które b�d� zamontowane na platformie.
5. BADANIA EKSPERYMENTALNE
Celem bada� eksperymentalnych by�o okre�lenie zakresu zmian przemieszcze� poprzecznych p�aszczyzny platformy na skutek zmian ci�nienia w pojedynczym kole pojazdu na skutek najechania na przeszkod�. Aby wyeliminowa wp�yw zmian w�a�ciwo�ci gruntu w czasie kolejnych prób eksperymentalnych na potrzeby bada� przyj�to rozwa�y poruszanie si� eksperymentalnej platformy ko�owej po twardej powierzchni p�askiej (pod�oga laboratorium). Platform� obci��ono robotem dydaktycznym o masie 30kg, a w tzw. chwytaku robota umieszczono pisak typu Marker. Na drodze ruchu jednego ko�a platformy jako przeszkod� umieszczono klocek o wymiarach 35 x 35 mm, przyklejony trwale do pod�o�a. Klocek umieszczono w takim oddaleniu od �ciany, aby moment nanoszenia punktu (pomiaru) nast�powa� dla klocka le��cego pod osi� poprzeczn� ko�a, czyli aby ugi�cie opony na skutek najechania na klocek by�o maksymalne.
Zadanie eksperymentalne polega�o na wielokrotnym doje�d�aniu pchanej platformy do �ciany i nanoszeniu punktów na ekran przez pisak celem okre�lenia rozrzutu tych punktów przy kolejnych próbach dojazdu. W czasie dojazdu do �ciany bez przeszkody ci�nienie w kole wynosi�o p=2,4 bar, natomiast przy przeje�d�aniu przez klocek przy kolejnych próbach dokonywano modyfikacji ci�nienia powietrza w kole pneumatycznym w sposób r�czny wed�ug schematu sterowania z rys. 8. Cechy metodyki bada� ilustruje rys. 9.
Rys. 9. Metoda oceny w�asno�ci jezdnych platformy ko�owej: przejazd przez przeszkod�
Pisak zamocowany w chwytaku robota dydaktycznego po dojechaniu platformy do �ciany nanosi� na plansz� punkty o rozrzucie uzale�nionym od aktualnej warto�ci ci�nienia
-
Koncepcja optymalizacji w�asno�ci jezdnych platformy robota mobilnego 231
p w modyfikowanym kole (w pozosta�ych trzech ko�ach ci�nienie wynosi�o 2,4 bar). Poniewa� ogumienie charakteryzuje tzw. pe�zanie, próby dojazdu dla konkretnej warto�ci ci�nienia p realizowano po trzy razy. Rysunek 10 ilustruje plansz� z naniesionymi punktami obrazuj�cymi rozrzut ich po�o�enia w zale�no�ci od ci�nienia p w kole pneumatycznym.
Rys.10. Punkty naniesione przez pisak podczas doje�d�ania platformy do planszy
Zilustrowana na rysunku 10 plansza z naniesionymi punktami jest jedn� z wielu uzyskanych podczas realizacji bada� eksperymentalnych.
6. WNIOSKI
Przeprowadzone testy nanoszenia przez pisak punktów podczas dojazdu do planszy pokaza�y, �e ich po�o�enie zale�y od warto�ci ci�nienia p w tym kole pneumatycznym platformy mobilnej, które naje�d�a aktualnie na przeszkod� (tutaj: klocek o prostopad�o�ciennym kszta�cie). Pozosta�e ko�a toczy�y si� po powierzchni p�askiej. Rozrzut po�o�enia punktów wynika z faktu po�redniego oddzia�ywania pod�o�a na konstrukcj� platformy za pomoc� ko�a pojazdu; ró�na warto� ci�nienia p kszta�tuje okre�lony wspó�czynnik spr��ysto�ci ko opony jako elementu podatnego wed�ug zale�no�ci (2) i (6). Z rys. 10 wida, �e punkty pomiaru umiejscowione s� na promieniu krzywizny zakre�lanym przez pisak przy ró�nych warto�ciach ci�nienia w kole pneumatycznym (punkty 1 do 4). Po�o�enie punktu oznaczonego jako 5 (ci�nienie powietrza wynosi�o „0” bar) wynika z nadmiernego odchylenia poprzecznego platformy na skutek podatno�ci poprzecznej opony pozbawionej ci�nienia oraz obluzowania opony na obr�czy.
Przyj� zatem mo�na, �e modyfikuj�c podczas ruchu platformy mobilnej warto� ci�nienia p w kole pneumatycznym osi�gn� mo�na popraw� mo�liwo�ci funkcjonalnych pojazdu podczas poruszania si� w trudnym terenie. Rozwi�za przy tym nale�y odpowiednie zadanie optymalizacji przy zadanym wskaniku jako�ci dotycz�cym w�a�ciwo�ci funkcjonalnych, polegaj�ce na minimalizacji funkcji celu optymalizuj�cej warto� ci�nienia w oponie na podstawie informacji o przeszkodach na torze jazdy ko�a
1 – bez przeszkody (p = 2,4bar); 2 – z przeszkod� (p = 2,4bar); 3 – z przeszkod� (p = 1bar); 4 – z przeszkod� (p = 0,5bar); 5 – z przeszkod� (p = 0bar)
-
232 Zbigniew Seta
pneumatycznego. Sygna�em wyj�ciowym algorytmu optymalizacyjnego b�dzie informacja przeznaczona dla uk�adu wykonawczego o strukturze zilustrowanej na rys. 8. Realizacja takiego uk�adu sterowania optymalnego jest mo�liwa w praktyce i zamierzeniem autora jest kontynuowanie bada� w tym kierunku.
Bibliografia
1. Athans M., Falb P. L.: Sterowanie optymalne. Wst�p do teorii i jej zastosowania. Wydawnictwo WNT, Warszawa 1966.
2. Dziewiecki K., Misiak J.: �wiczenia laboratoryjne z wytrzyma�o�ci materia�ów. Wydawnictwo Wy�szej Szko�y In�ynierskiej. Radom 1996.
3. http://iair.mchtr.pw.edu.pl/p/robotyka_mobilna/menu.html. 4. http://pryzmat.pwr.wroc.pl/Pryzmat_129/129dud.html. 5. Kasprzyk T., Prochowski L.: Teoria samochodu. Obci��enia dynamiczne zawiesze�. Wyd. WK�,
Warszawa 1990. 6. Lammel L., Osiadacz A.: Pneumatyczne przetworniki Automatyki. Wyd. WNT, ’78. 7. Lanzendoerfer J.: Badania pojazdów samochodowych. Wydawnictwa Komunikacji i ��czno�ci.
Warszawa 1977. 8. Lanzendoerfer J., Szczepaniak C., Szosland A.: Teoria ruchu samochodu. Wydawnictwo Politechniki
�ódzkiej. �ód 1988. 9. Orze�owski S.: Budowa podwozi i nadwozi samochodowych. Wyd. PWSZ, ’72. 10. Orze�owski S.: Eksperymentalne badania samochodów i ich zespo�ów. Wydawnictwo WNT, Warszawa
1995. 11. Rotenberg R. W.: Zawieszenie samochodu. Wydawnictwo WK�, Warszawa 1974. 12. Szenajch W.: Nap�d i sterowanie pneumatyczne. Wyd. WNT, Warszawa 1997. 13. www.antiterrorism.eu. 14. uchowski A.: Pomiary dynamiczne. Wyd. Politechnika Szczeci�ska, Szczecin 1984.
THE CONCEPT OF OPTIMIZING RIDE PROPERTIES OF A MOBILE ROBOT PLATFORM
Summary: The attention is paid in this article to the necessity of improving ride properties of a mobile robot constructed on the basis of a vehicular chassis. The tilt of a chassis while overcoming an obstacle fixes the attention here. The problems resulting from relocating of such a robot in a difficult terrain, that influences the quality of fulfilling the task by this vehicle, are under discussion as well. The limits concerning the criteria of the quality of ride properties of mobile platforms are justified, too. Moreover, theoretical analysis of a movement of a pneumatic wheel on a hardened ground is also conducted. Lots of attention is devoted to the construction of an experimental vehicular platform which was used during the research. Finally, experimental researches carried out at this stage are described of which the main purpose is to define the practical possibility of realization of an accepted concept of optimising the ride properties of a mobile robot. Keywords: Mobile robots, mobile platform, steering and optimization, ride properties.
Recenzent: Krzysztof Zboi�ski