IV. WPROWADZENIE DO MES - Zakład Wytrzymałości Materiałó 04.pdf · Konderla P. Metoda...
7
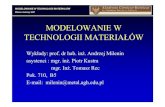
Konderla P. Metoda Elementów Skończonych, teoria i zastosowania ________________________________________________________________________________________ 27 IV. WPROWADZENIE DO MES Poszukiwanie rozwiązań przybliżonych bazujących na metodach residualnych i wariacyjnych napotyka na trudności w doborze funkcji bazowych określonych na całym obszarze. Metoda elementów skończonych pokonuje te trudności – w MES stosuje się zlokalizowane funkcje bazowe. 1. Sformułowanie algorytmu MES dla przestrzennego/płaskiego/liniowego zagadnienia teorii sprężystości Założenie: – sformułowanie Rayleigha-Ritza, – szczegóły algorytmy pokazano na przykładzie zagadnienia dwuwymiarowego. 1. Obszar Ω dzielimy na elementy skończone Ω e e=1,2,....,E – proste geometryczne kształty, – wyróżniamy punkty węzłowe a 1 , a 2,....., a N, ogólnie ) , ( 2 1 i i i a a = a i=1,2,...,N, N - liczba punktów węzłowych. 2. Element skończony Geometria elementu – może być zdefiniowany lokalny układ dla każdego elementu. Będziemy przyjmowali, że i e i x x = ) ( . Punkty węzłowe – zwykle w narożach ) , ( ) ( 2 ) ( 1 ) ( e e e a a α α α = a α =1,2,..., N e Rys. 4.1. Schemat statyczny i model dyskretny obszaru Ω
Transcript of IV. WPROWADZENIE DO MES - Zakład Wytrzymałości Materiałó 04.pdf · Konderla P. Metoda...

Konderla P. Metoda Elementów Skończonych, teoria i zastosowania ________________________________________________________________________________________
27
IV. WPROWADZENIE DO MES
Poszukiwanie rozwiązań przybliżonych bazujących na metodach residualnych i wariacyjnych napotyka na trudności w doborze funkcji bazowych określonych na całym obszarze.
Metoda elementów skończonych pokonuje te trudności – w MES stosuje się zlokalizowane funkcje bazowe.
1. Sformułowanie algorytmu MES dla przestrzennego/płaskiego/liniowego
zagadnienia teorii sprężystości
Założenie: – sformułowanie Rayleigha-Ritza, – szczegóły algorytmy pokazano na przykładzie zagadnienia dwuwymiarowego.
1. Obszar Ω dzielimy na elementy skończone Ωe e=1,2,....,E
– proste geometryczne kształty, – wyróżniamy punkty węzłowe a1, a2,....., aN, ogólnie ),( 21 iii aa=a i=1,2,...,N, N - liczba
punktów węzłowych.
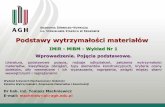
2. Element skończony
Geometria elementu – może być zdefiniowany lokalny układ dla każdego elementu. Będziemy przyjmowali,
że ie
i xx =)( . Punkty węzłowe – zwykle w narożach ),( )(
2)(
1)( eee aa ααα =a α =1,2,..., Ne
Rys. 4.1. Schemat statyczny i model dyskretny obszaru Ω

Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: luty 2007) ________________________________________________________________________________________
28
Aproksymacja przemieszczenia – dobieramy funkcje bazowe
φ(x)(e) = [φ1(e), φ2
(e),..., φNe(e)], (4.1)
– parametry węzłowe
q(e) =
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
(e)Ne
(e)2
(e)1
q
M, (4.2)
– aproksymacja przemieszczenia u(e)(x)= φ(e)(x) q(e) = φα
(e) qα(e), (4.3)
– funkcje bazowe
φα(e)(aβ(e))=
⎩⎨⎧
β≠αβ=α
dla dla
0I
(4.4)
są klasy Cn-1 gdzie n jest rzędem najwyższej pochodnej występującej w wyrażeniu energii potencjalnej Пp[u(x)] (ogólnie: w funkcjonale opisującym zagadnienie),
– dla zagadnienia dwuwymiarowego
)()(
)(
3
2
1)(
333231
232221
131211)(
3
2
1)( ee
eee
e
qqq
uuu
αα
αα
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ϕϕϕϕϕϕϕϕϕ
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧= qu ϕ . (4.5)
Odkształcenie ε(e) = Du(e) = Dφα
(e)qα(e) = Bα
(e)qα. (4.6)
Naprężenie σ(e) = C ε(e) = C Bα
(e)qα. (4.7)
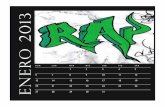
3. Funkcjonał - energia potencjalna układu
Zapisujemy energię potencjalną układu pokazanego na rys. 4.3.
Rys. 4.2. Element skończony

Konderla P. Metoda Elementów Skończonych, teoria i zastosowania ________________________________________________________________________________________
29
Πp[u]= )(dˆd]ˆ21[ TTT Ω∂−Ωρ−∫ ∫
Ω Ω∂
tufu σε . (4.8)
Energię potencjalną zapisujemy jako sumę energii potencjalnej z poszczególnych elementów. Jest to konsystentnie równoważne jeżeli całka po wspólnych brzegach podobszarów )(eΩ∂ jest równa zeru. Tak jest, jeżeli funkcje kształtu są odpowiedniej klasy ciągłości.
Tak więc
∑=
Π≅ΠE
e
ee
1
)()(p ][u , (4.9)
gdzie – energia potencjalna pojedynczego elementu skończonego
Πp(e)[u(e)]= ∫
Ω
=Ωρ− d]ˆ21[ )e(T(e)T(e) fuσε =Ωρ−⋅Ω ∫∫
Ωαα
Ωββαα
ee
dqd eTeTeeeTeT fqCBBq ˆ21 )()()()()()( ϕ
=−= ααβαβα)()()()()(
21 eeTeeeT Qqqkq ][ )()( ee qΠ , (4.10)
– macierz sztywności elementu ∫
Ωβααβ Ω=
e
eee d)()(T)( CBBk , (4.11)
– wektor równoważników statycznych obciążenia ∫
Ωαα Ωρ=
e
ee dˆ)(T)( fQ ϕ . (4.12)
4. Agregacja układu ES
Globalny wektor parametrów węzłowych q = [q1, q2,...,qi,..., qN]T (4.13)
Macierz incydencji
Rys. 4.3.

Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: luty 2007) ________________________________________________________________________________________
30
q(e)α=Λ(e)
αi qi, (4.14)
gdzie Λ (e)αi=
⎩⎨⎧ =α
przypadku przeciwnym w jeżeli
0aaI i
e)( (4.15)
Funkcjonał Πp[u] = Πp[q] =
= ∑∑∑∑=
αα=
βαβα==
−=Π=ΠE
e
eeii
E
ej
ej
eeii
E
e
eeeE
e
ee
1
)()(TT
1
)()()(TT
1
)()()(
1
)()( ][][ QΛqqΛkΛqqΛq =
∑=
−=E
eiijiji
1
TT QqqKq , (4.16)
gdzie
∑ βαβα=e
ej
eeiij ,)()()(T ΛkΛK ∑ αα=
e
eeii
)()(T QΛQ . (4.17)
Minimalizacja funkcjonału
ijiji
p QqKq
=⇒=∂
Π∂0 lub QKq = . (4.18)
Jeżeli u(e) nie są kinematycznie dopuszczalne, wówczas na układ powyższy należy dodatkowo nałożyć warunki brzegowe kinematyczne.
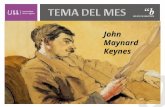
Przykład – ściskanie pręta prostego - zagadnienie jednowymiarowe.
Element skończony e-ty
- wektor parametrów )(
2
1)(e
e
⎭⎬⎫
⎩⎨⎧
=q ,
Rys. 4.4. Schemat statyczny zagadnienia jednowymiarowego pręta

Konderla P. Metoda Elementów Skończonych, teoria i zastosowania ________________________________________________________________________________________
31
- funkcje bazowe: ⎭⎬⎫
⎩⎨⎧
−=ϕϕ=e
e
e
eeeee
lx
lxxx
)()()()(2
)(1
)( ,1)(),(φ ,
- wektor przemieszczenia: u(e) = φα(x(e))q(e)α = φ(e)q(e),
- wektor odkształcenia: )(
2
1)()()()()( ]11[e
e
ee
eeee
llu
x ⎭⎬⎫
⎩⎨⎧
−==∂∂
= αα qBε ,
- wektor naprężenia: )()()()()()( eeeeee AEAEAE αα==== qBεεCεσ )()( ee N=σ
- macierz sztywności:
⎥⎦
⎤⎢⎣
⎡−
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=⋅⎥⎦
⎤⎢⎣
⎡−⋅
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−== ∫ 11
1111
111,1
1
1
22
22
0
)()()(
e
ee
eeee
ee
e
el
eeTe
lEA
ll
llEAllll
l
lAEe
CBBk ,
- wektor równoważników statycznych obciążenia:
⎭⎬⎫
⎩⎨⎧
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧−
=⎭⎬⎫
⎩⎨⎧ −
== ∫∫ 11
22
22
22
)()( e
e
ee
el
e
el
ee pll
ll
lpdx
xxl
lppdx
ee
φQ ,
- macierz koincydencji dla elementu e=1:
⎥⎦
⎤⎢⎣
⎡=
0000001000000001)1(Λ
transformacja do układu globalnego – agregacja układu:
q(e)=Λ(e) q,
Globalny układ równań MES:
Kq = Q w szczególności:
8
12221
11121
121121
11
4
5
4
3
2
1
pl
qqqqq
lEA
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−
−−−−
−
,
Po podstawieniu warunku kinematycznego: q5=0, rozwiązujemy układ równań otrzymując:
[ ] .7,12,15,16
32T
2
EApl
=q

Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: luty 2007) ________________________________________________________________________________________
32
2. Sformułowanie algorytmu MES dla zagadnienia linowej dynamiki
Wykorzystujemy zasadę Hamiltona:
Kinematycznie dopuszczalne pole przemieszczeń u(x) przyjmujące rzeczywiste wartości w chwilach tp i tk minimalizuje funkcjonał
0)( =Πδ⇒τΠ−=Π ∫ H
t
tpH
k
p
dK (4.19)
gdzie:
energia kinetyczna: Ωρ= ∫Ω
dTuu &&
21K , (4.20)
energia potencjalna: )(ˆ]ˆ21[ Ω∂−Ωρ−=Π ∫∫
Ω∂Ω
dd TTT tufuσεp . (4.21)
Po zapisaniu poszczególnych składników
,21
21
d21d
21
T
1
)()()(T
1
)()()(T)(T
1
)()()(T)(T
qMqqmq
qqqq
&&&&
&&&&
==
=Ωρ=Ωρ=
∑
∑ ∫∑ ∫
=
= Ω= Ω
E
e
eee
E
e
eeeeE
e
eeee
ee
K ϕϕϕϕ
(4.22)
QqKqq TT −=Π21
p . (4.23)
Podstawiając do zasady Hamiltona, mamy
0d)(0 TTT =τδ+δ−δ⇒=Πδ ∫k
p
t
tH QqKqqqMq && . (4.24)
Całkujemy pierwszy składnik przez części
0d)(|d TTT 2
1=τδ+δ−+δ+τδ− ∫ ∫
k
p
k
p
t
t
t
t
tt QqKqqqqMqMq &&& , (4.25)
gdzie drugie wyrażenie jest równe zeru ponieważ z założenia 02
1 ≡δ==ttttq .
Stąd
0d)(( T =τ+−−δ∫k
p
t
t
QKqqMq && , (4.26)
QKqqM =+&& . (4.27)
W przypadku uwzględnienia tłumienia
Rys. 4.5

Konderla P. Metoda Elementów Skończonych, teoria i zastosowania ________________________________________________________________________________________
33
QKqqCqM =++ &&& , (4.28)
gdzie macierz tłumienia zwykle przyjmowana jest w postaci: C=α1M+α2K, (4.29)
α1, α2 – współczynniki zależne od częstości dragań ω.
Zagadnienie linowej dynamiki sprowadzone zostało do układu równań różniczkowych zwyczaj-nych drugiego rzędu. Opracowanych jest szereg metod całkowania numerycznego tego układu równań z warunkami początkowymi
.ˆ)0(
,ˆ)0(
&& =
= (4.30)
Agregacja macierzy mas przedstawia się następująco
∑=
=E
e
eee
1
)()()( ΛmΛM T , (4.31)
gdzie macierz mas dla elementu wyznacza się jako – macierz konsystentna:
Ωρ= ∫Ω
dT )()()( eee
e
φφm , (4.32)
– macierz niekonsystentna (przyjmuje się masy rozłożone w węzłach)
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
eN
e
m
mm
L
MOMM
L
L
00
0000
2
1
)(m . (4.33)