I. ELEMENTY TEORII MODELOWANIApojazdy.utp.edu.pl/ksiazki/Model/R1.pdfkomputerowego symulowania...
19
I. ELEMENTY TEORII MODELOWANIA 1. WSTP Slowo "model" powstalo z laciskiego slowa "modus" - "modulus", co znaczy: miara, obraz, sposób. Jego pierwotne znaczenie bylo zwizane z budownictwem i uywano go dla oznaczenia wzorca, lub przedmiotu podobnego do innego przedmiotu [14,26] . Pogldowe obrazy rzeczywistoci, hipotetycznie odtwarzajce rozmaite obiekty, zjawiska i sytuacje istniejce w realnym wiecie, towarzyszyly badaczom od dawna. W cigu ostatnich dwóch wieków, modelowanie stalo si podstaw badania systemów w matematyce, fizyce, chemii, biologii, ekonomii i in. W ostatnim pólwieczu modelowanie jest szeroko wykorzystywane równie w cybernetyce oraz w analizie dynamicznej maszyn [11,12,23, 43]. Opisywane w literaturze procedury bada naukowych i ich weryfikacji na drodze eksperymentu wykazuj, e terminu "model" uywa si w dwóch rónych znaczeniach, a mianowicie [43]: - dla oznaczenia teorii, która jest strukturalnie podobna do innej, co umoliwia przechodzenie od jednej teorii do innej za pomoc zwyklej zmiany terminologii; w tym znaczeniu model jest rodkiem poznania; - dla oznaczenia systemu, do którego odnosi si pewna teoria praktyczna lub teoretyczna dla uproszczonego odzwierciedlenia badanego systemu naturalnego; taki model jest przedmiotem poznania. Model jest realnie istniejcym lub wyobraonym obrazem, zastpujcym badany system naturalny (atom, czsteczk, mechanizm, system sloneczny itp.). Ten obraz odzwierciedla pewne, rzeczywiste lub hipotetyczne wlasnoci badanego systemu, jego budow i jest do niego podobny pod wzgldem wybranych przez badacza osobliwoci strukturalnych. Elementy i relacje zachodzce w modelowanym systemie s odzwierciedlone w postaci innych elementów i relacji, typowych dla danej dziedziny bada. Model jest zatem z zaloenia pewn idealizacj lub uproszczeniem rzeczywistoci. Sam charakter i stopie uproszczenia zaley od wiedzy, potrzeb i wiadomoci badacza i moe si zmienia w zalenoci od celu bada. Wspóln dla teorii i modelu jest wlaciwo odnoszenia si do rzeczywistoci, postrzeganej w uproszczonej, abstrakcyjnej formie. Opis sformalizowany, w którym s dokladnie ustalone: sklad, struktura, elementy wejciowe i reguly przeksztalcania staj si synonimem ilociowego zapisu, badanego systemu naturalnego. Jeeli uda si utosami opis sformalizowany z dowiadczalnie potwierdzon rzeczywistoci, to otrzymujemy model logiczno - matematyczny, lub po prostu model matematyczny, który odzwierciedla badany obiekt, zjawisko lub sytuacj. W naukach technicznych i ekonomicznych taki model bywa coraz czciej wykorzystywany do komputerowego symulowania funkcjonowania systemu, którego odzwierciedla dany model. W procesie poznania poszukuje nowych praw, przechodzc od hipotez do teorii, wykorzystujc przy tym wiedz, dowiadczenie, intuicj oraz fantazj naukow. Modele buduje si i stosuje glównie wtedy, kiedy poznanie zmierzajce od hipotezy do sformulowania teorii nie ogranicza si do zbierania i opisywania poszczegó1nych izolowanych faktów, lecz uwzgldnia równie przemylany i dobrze zaprogramowany eksperyment. Jedna z definicji mówi, e: model jest to taki dajcy si pomyle lub materialnie zrealizowa uklad, który odzwierciedlajc lub odtwarzajc przedmiot badania, zdolny jest zastpowa go tak, e jego badanie dostarcza nam nowej informacji o tym przedmiocie. Inna definicja mówi, e: model jest zastpujc oryginal, przyjt form reprezentacji, wykorzystywan do wyjanienia i przewidywania zachowania si oryginalu w sposób adekwatny z punktu widzenia celu rozwaa. Wspó1n cech wszelkiego rodzaju modeli jest ich zdolno odzwierciedlania
Transcript of I. ELEMENTY TEORII MODELOWANIApojazdy.utp.edu.pl/ksiazki/Model/R1.pdfkomputerowego symulowania...

I. ELEMENTY TEORII MODELOWANIA
1. WST�P Słowo "model" powstało z łaci�skiego słowa "modus" - "modulus", co znaczy: miara,
obraz, sposób. Jego pierwotne znaczenie było zwi�zane z budownictwem i u�ywano go dla oznaczenia wzorca, lub przedmiotu podobnego do innego przedmiotu [14,26] .
Pogl�dowe obrazy rzeczywisto�ci, hipotetycznie odtwarzaj�ce rozmaite obiekty, zjawiska i sytuacje istniej�ce w realnym �wiecie, towarzyszyły badaczom od dawna. W ci�gu ostatnich dwóch wieków, modelowanie stało si� podstaw� badania systemów w matematyce, fizyce, chemii, biologii, ekonomii i in. W ostatnim półwieczu modelowanie jest szeroko wykorzystywane równie� w cybernetyce oraz w analizie dynamicznej maszyn [11,12,23, 43].
Opisywane w literaturze procedury bada� naukowych i ich weryfikacji na drodze eksperymentu wykazuj�, �e terminu "model" u�ywa si� w dwóch ró�nych znaczeniach, a mianowicie [43]: - dla oznaczenia teorii, która jest strukturalnie podobna do innej, co umo�liwia
przechodzenie od jednej teorii do innej za pomoc� zwykłej zmiany terminologii; w tym znaczeniu model jest �rodkiem poznania;
- dla oznaczenia systemu, do którego odnosi si� pewna teoria praktyczna lub teoretyczna dla uproszczonego odzwierciedlenia badanego systemu naturalnego; taki model jest przedmiotem poznania.
Model jest realnie istniej�cym lub wyobra�onym obrazem, zast�puj�cym badany system naturalny (atom, cz�steczk�, mechanizm, system słoneczny itp.). Ten obraz odzwierciedla pewne, rzeczywiste lub hipotetyczne własno�ci badanego systemu, jego budow� i jest do niego podobny pod wzgl�dem wybranych przez badacza osobliwo�ci strukturalnych. Elementy i relacje zachodz�ce w modelowanym systemie s� odzwierciedlone w postaci innych elementów i relacji, typowych dla danej dziedziny bada�.
Model jest zatem z zało�enia pewn� idealizacj� lub uproszczeniem rzeczywisto�ci. Sam charakter i stopie� uproszczenia zale�y od wiedzy, potrzeb i �wiadomo�ci badacza i mo�e si� zmienia� w zale�no�ci od celu bada�. Wspóln� dla teorii i modelu jest wła�ciwo�� odnoszenia si� do rzeczywisto�ci, postrzeganej w uproszczonej, abstrakcyjnej formie.
Opis sformalizowany, w którym s� dokładnie ustalone: skład, struktura, elementy wej�ciowe i reguły przekształcania staj� si� synonimem ilo�ciowego zapisu, badanego systemu naturalnego. Je�eli uda si� uto�sami� opis sformalizowany z do�wiadczalnie potwierdzon� rzeczywisto�ci�, to otrzymujemy model logiczno - matematyczny, lub po prostu model matematyczny, który odzwierciedla badany obiekt, zjawisko lub sytuacj�. W naukach technicznych i ekonomicznych taki model bywa coraz cz��ciej wykorzystywany do komputerowego symulowania funkcjonowania systemu, którego odzwierciedla dany model.
W procesie poznania poszukuje nowych praw, przechodz�c od hipotez do teorii, wykorzystuj�c przy tym wiedz�, do�wiadczenie, intuicj� oraz fantazj� naukow�. Modele buduje si� i stosuje głównie wtedy, kiedy poznanie zmierzaj�ce od hipotezy do sformułowania teorii nie ogranicza si� do zbierania i opisywania poszczegó1nych izolowanych faktów, lecz uwzgl�dnia równie� przemy�lany i dobrze zaprogramowany eksperyment.
Jedna z definicji mówi, �e: model jest to taki daj�cy si� pomy�le� lub materialnie zrealizowa� układ, który odzwierciedlaj�c lub odtwarzaj�c przedmiot badania, zdolny jest zast�powa� go tak, �e jego badanie dostarcza nam nowej informacji o tym przedmiocie.
Inna definicja mówi, �e: model jest zast�puj�c� oryginał, przyj�t� form� reprezentacji, wykorzystywan� do wyja�nienia i przewidywania zachowania si� oryginału w sposób adekwatny z punktu widzenia celu rozwa�a�.
Wspó1n� cech� wszelkiego rodzaju modeli jest ich zdolno�� odzwierciedlania
systemów naturalnych. Istota modelowania zasadza si� na relacji równowa�no�ci mi�dzy systemem a modelem. W metodyce modelowania rozró�nia si� dwa podstawowe sposoby odzwierciedlenia: homomorficzne i izomorficzne. Homomorfizm zapewnia podobie�stwo składu i struktury modelu i systemu modelowanego, które pozwala na jednoznaczne odwzorowanie systemu badanego w model, podobny do niego pod wzgl�dem działania. Izomorfizm za� gwarantuje wzajemnie jednoznaczne podobie�stwo składu i struktury modelu i systemu. Oznacza to, �e na podstawie systemu mo�na zbudowa� model, a na podstawie modelu mo�na odtworzy� system. Takie podobie�stwo odniesione do sposobu działania modelu i systemu modelowanego nazywa si� izofunkcjonalizmem [26]. 2. KLASYFIKACJA MODELI
W ka�dej działalno�ci człowieka, szczególnie w projektowaniu, wytwarzaniu i eksploatacji wykorzystuje si� modele. Istnieje wiele definicji modeli. Oto niektóre z nich:
1) przez model rozumie si� taki daj�cy si� pomy�le� lub materialnie zrealizowa� układ, który odzwierciedlaj�c lub odtwarzaj�c przedmiot badania zdolny jest zast�powa� go tak, ze jego badanie dostarcza nam nowej wiedzy o tym przedmiocie [17];
2) model jest to narz�dzie za pomoc� którego mo�na opisa� system i jego zachowanie si� w ró�nych warunkach zewn�trznych [5];
3) model jest teoretycznym opisem badania obiektów, który charakteryzuje si� nast�puj�cymi cechami, tzn. jest [6]:
- pewnym uproszczeniem rzeczywisto�ci; - w sensie pewnego kryterium zbie�ny z rzeczywisto�ci�; - na tyle prosty, �e mo�liwa jest jego analiza dost�pnymi metodami obliczeniowymi; - �ródłem informacji o obiekcie bada�.
Budow� modeli zajmuje si� dyscyplina nauki nazywana identyfikacja [5,6]. Klasyfikacja modeli pozwala ustali�, jak sposób modelowania zale�y od celu bada� i
specyfiki badanego systemu. Klasyfikacja jest podstaw� do okre�lenia zasadniczych funkcji spełnianych przez modele, a mianowicie: - funkcji praktycznej, któr� spełniaj� modele jako przedmioty poznania naukowego; - funkcji teoretycznej, któr� modele pełni� jako szczególny obraz rzeczywisto�ci,
jednocz�cy elementy logiczne i intuicyjne, konkretne i abstrakcyjne oraz ogó1ne i szczegółowe.
Przyst�puj�c do tworzenia modelu nale�y: - okre�li� cel modelowania, zwi�zane z tym wymagania i �rodki u�yte do budowy modelu; - ustali� jaki segment, jakiego systemu, ma odzwierciedla� model. Podj�te decyzje s� podstaw� dla ustalenia postaci modelu, a w rezultacie dla okre�lenia jego klasy. Proponuje si� wyró�nia� dwie główne klasy modeli: 1. modele strukturalne, które odzwierciedlaj� wybrane elementy systemu oraz relacje mi�dzy nimi; takie modele ukazuj� lokalizacj� geometryczn� elementów oraz ich powi�zania i słu�� do badania poprawno�ci konstrukcji; maj� one na ogół posta� rysunków zło�eniowych lub schematów organizacyjnych; 2. modele funkcjonalne, które odzwierciedlaj� wpływ wybranych elementów i relacji na sposób funkcjonowania i sterowania systemu; te modele mog� przybiera� ró�ne postacie, niekiedy zupełnie innej natury fizycznej ni� modelowany system.
Z praktycznego punktu widzenia, bardziej przydatny jest drugi rodzaj klasyfikacji. Przynale�no�� do danej klasy zale�y od �rodków wykorzystanych do budowy modelu, przy uwzgl�dnieniu sposobu odzwierciedlenia wybranych własno�ci, procesów i zwiqzk6w zachodz�cych w modelowanym systemie oraz celu bada�, któremu jest podporz�dkowany charakter poszukiwanych informacji. Według takich kryteriów, modele mo�na podzieli� na cztery klasy:

1. modele materialne (działaj�ce, rzeczywiste), mog� by� utworzone, specjalnie w celu wykonania bada�, z istniej�cych obiektów o okre�lonym przeznaczeniu u�ytkowym, przy zachowaniu ich fizycznej to�samo�ci z oryginałem. Podczas funkcjonowania, w wybranym segmencie własno�ci, procesów i zwi�zków, generuj� one informacje poszukiwane przez badacza, a po zako�czeniu bada� mog� by� nadal wykorzystywane zgodnie z ich przeznaczeniem. 2. modele idealne, które nie posiadaj� tej samej co badany system natury fizycznej i nie s� do niego podobne ani w sensie fizycznym, ani geometrycznym. Nazwa tych modeli nie wyra�a �ci�le ich charakteru i wynika z istniej�cej tradycji. Jako szczególny rodzaj takiego modelu idealnego mo�na wyró�ni� model cybernetyczny. Jednak model cybernetyczny jest zbyt skomplikowany aby stanowi� przedmiot bezpo�redniego poznania, mo�e jednak stanowi� podstaw� do utworzenia innego, bardziej uproszczonego modelu idealnego. 3. modele sformalizowane, które s� reprezentacj� modeli fizycznych na jeszcze wy�szym poziomie abstrakcji. Tak� reprezentacj� mo�na utworzy� wtedy, gdy poj�cia wyst�puj�ce w modelu fizycznym dadz� si� wyrazi� za pomoc� znaków i relacji matematycznych lub logicznych. Cech� modelu sformalizowanego jest zatem kompletny brak podobie�stwa mi�dzy elementami i relacjami, z których go zbudowano, a składem i struktur� modelowanego systemu. Model jest umowny a nie pogl�dowy i nie ma nic wspólnego z charakterem elementów i relacji tworz�cych modelowany system [26].
Rozwój matematyki i fizyki przyczynił si� do tego, �e w naukach �cisłych i technicznych, modele sformalizowane, zwane po prostu modelami matematycznymi, stanowi� najbardziej reprezentatywn� grup� modeli abstrakcyjnych. S� one zapisywane w postaci równa� ró�niczkowych, całkowych, deterministycznych lub probabilistycznych. Modelowanie matematyczne pozwala wnika� w istot� badanych systemów i udost�pnia szczegółowemu badaniu wiele własno�ci, procesów i zwi�zków, które dot�d wymykały si� analizie. Badanie modeli matematycznych umo�liwia uzyskanie warto�ciowych informacji o systemach technicznych, niezb�dnych m.in. do ich projektowania, wytwarzania i eksploatacji. 4. modele energetyczne s� od niedawna uwzgl�dniane jako oddzielna klasa ze wzgl�du na "tworzywo", z którego s� budowane. Taki model jest budowany w oparciu o przemiany energetyczne zachodz�ce w systemie. Z uwagi na du�e mo�liwo�ci i niski koszt, modele energetyczne s� coraz powszechniej stosowane, zwłaszcza w naukach �cisłych i technice. Rozwój komputeryzacji prac badawczych spowodował znaczne zwi�kszenie mo�liwo�ci technik obliczeniowych. Pozwala to na badanie du�ych modeli energetycznych oraz komputerow� symulacj� funkcjonuj�cych systemów. 3. MODEL BLOKOWY
Schematy blokowe, maj�ce na celu przedstawienie kolejno�ci zdarze� lub wzajemne ich powi�zania, maj� wa�ne zastosowanie zarówno w dziedzinie techniki jak i organizacji. Przy pracy na modelu fizycznym lub matematycznym skomplikowanego układu cz�sto wygodnie jest uwidoczni� za pomoc� schematu blokowego zale�no�ci i zwi�zki mi�dzy podukładami stanowi�cymi składowe rozwa�anego systemu. Umo�liwiaj� one łatwiejszy opis działania układu, uwydatniaj� kolejno�� przyczyn i skutków, wskazuj�c na mo�liwo�� podziału analizy układu mi�dzy podukłady studiowane oddzielnie [20].
Analiza dynamiczna w uj�ciu schematów blokowych i ich modeli matematycznych w ko�cowej fazie musi by� skumulowana, zespalaj�c modele matematyczne dla potrzeb oceny własno�ci dynamicznych całego układu.
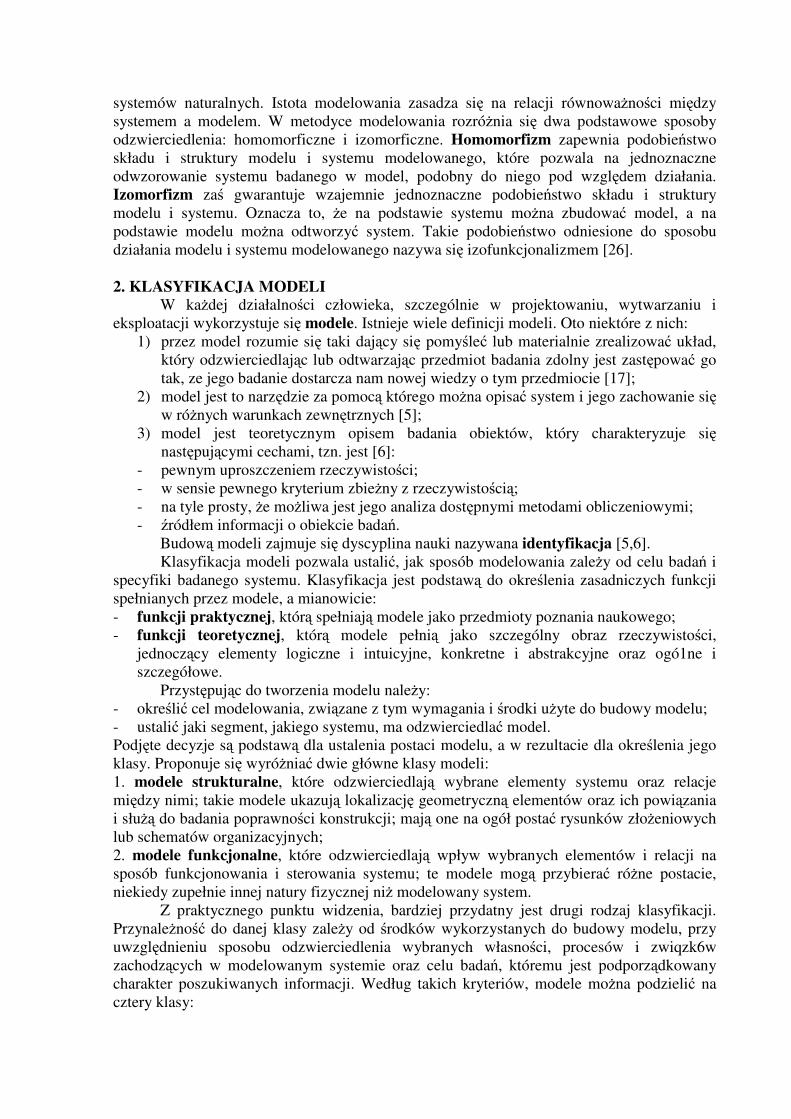
Podstaw� do tworzenia szczegółowych modeli blokowych obiektów rzeczywistych jest model cybernetyczny, przedstawiony schematycznie na rys.1.1, umo�liwiaj�cy analiz� zmian zachodz�cych w systemie.
U(t) ZMIANY STANU Y(t) DYNAMICZNEGO BADANEGO OBIEKTU S(t) Rys.1.1 Model cybernetyczny systemu W badaniach systemów technicznych w czasie "krótkim", wielko�ci opisuj�ce skład i
struktur�, zapisane symbolem S, traktuje si� na ogół jako parametry, które podczas bada�, pozostaj� stałe. Iloczyny kartezja�skie, które wyst�puj� w opisie modelu cybernetycznego s� uporz�dkowanymi zbiorami n-tek (par, trójek itd.), reprezentuj�cych zdarzenia zachodz�ce w systemie. Kolejne przej�cia od jednego do nast�pnego zdarzenia, tworz� transformacje. W modelu s� to transformacje wielko�ci fizycznych, które odzwierciedlaj� zmiany w czasie własno�ci procesów i zwi�zków zachodz�cych w systemie.
Z modelu cybernetycznego (rys.2) mo�na wyprowadzi� nast�puj�ce uproszczone relacje odwzorowania: G(t) : U(t) x S → X(t) (1) Φ(t) : U(t) x S → Y(t) (2) F(t) : X(t) x S → Y(t) (3) Relacja (1) reprezentuje ogó1n� notacj� modelu cybernetycznego typu "wej�cie - stan", natomiast relacje (2) i (3) reprezentuj� ogó1ne notacje modeli typu "wej�cie - wyj�cie" oraz "stan-wyj�cie".
W modelu cybernetycznym systemu technicznego wielko�ci fizyczne, które charakteryzuj� wej�cie, stan i wyj�cie, s� opisane za pomoc� zmiennych, które najcz��ciej s� liniowo niezale�nymi funkcjami czasu. Argument funkcji t∈T, reprezentuje o� czasu "krótkiego", w przedziale T. Dla celów bada� empirycznych oraz niekiedy - teoretycznych (np. w badaniach modeli układów automatycznej regulacji) te zmienne dzieli si� na trzy zbiory, a mianowicie: 1). zmienne wej�ciowe: u1(t), u2(t), ..., uN(t) – przedstawiaj�ce wymuszenia na wej�ciu modelu systemu, zapewniaj�ce jego funkcjonowanie; 2). zmienne wewn�trzne: x1(t), x2(t), ..., xn(t) - za pomoc� których mo�na opisa� badane stany lub własno�ci systemu; 3). zmienne wyj�ciowe: y1(t), y2(t), ..., yp(t) - opisuj�ce objawy funkcjonowania na wyj�ciu modelu systemu.
Podczas funkcjonowania systemu wewn�trzne �ródła zaburze� o sko�czonej wydajno�ci, wytwarzaj� reakcje systemu, które ujawniaj� si�, mi�dzy innymi, w postaci zmian stanu w czasie. Ten stan mo�na zapisa� za pomoc� wektora, którego współrz�dnymi s� zmienne wewn�trzne modelu. Sko�czony zbiór wszystkich mo�liwych stanów tworzy przestrze� stanów badanego systemu. Równocze�nie, zmiany stanu wewn�trznego powoduj�, �e na wyj�ciu modelu pojawiaj� si� zewn�trzne objawy funkcjonowania systemu, które mo�na zapisa� w postaci wektora i przestrzeni wyj�cia modelu cybernetycznego. Wzi�te razem zmienne wej�ciowe, wewn�trzne oraz wyj�ciowe całkowicie opisuj� badany system i tworz� zbiór zmiennych modelu.
Zwi�zek przyczynowo-skutkowy pomi�dzy wej�ciem, stanem i wyj�ciem, uwzgl�dniony w modelu cybernetycznym, mo�na przedstawi� w postaci: G (t) [ u (t), s ] = x (t) (4) ΦΦΦΦ (t) [ u (t), s ] = y (t) (5) F (t) [ x (t), s ] = y (t) (6) Relacje (4), (5) i (6) reprezentuj� ró�ne postacie modelu cybernetycznego. Ka�da z nich mo�e
by� podstaw� do utworzenia modelu fizycznego i matematycznego, badanego systemu technicznego. Relacja (5) okre�la zale�no�� wej�cia od wyj�cia i jest typowym zadaniem dotycz�cym badania "czarnej skrzynki", natomiast relacja (6) przedstawia ogóln� posta� zadania diagnostycznego.
Zwi�zek przyczynowo-skutkowy, który istnieje pomi�dzy wej�ciem oraz stanami i wyj�ciem powoduje, ze dla celów modelowania matematycznego, a tak�e dla identyfikacji i symulacji systemów technicznych, wielko�ci stanu i wyj�cia modelu cybernetycznego s� traktowane ł�cznie jako jedna kategoria. W takim przypadku, stany i wyj�cie s� reakcj� systemu na wymuszenia wej�ciowe; ta reakcja bywa niekiedy nazywana ogólnie stanem. 4. ZASADY MODELOWANIA MATEMATYCZNEGO Model fizyczny
Skład i struktura modelu fizycznego odzwierciedla w uproszczonej formie fragmenty składu i struktury systemu, uwzgl�dnione w modelu cybernetycznym i nale��ce do badanego segmentu systemu. Model cybernetyczny systemu jest opisywany przez szereg zmiennych, znanych i nieznanych. W rezultacie wyboru badanego segmentu systemu oraz uproszcze� dokonanych przez badacza, liczba zmiennych, i co za tym idzie reguł interakcji w modelu fizycznym, zostaje ograniczona. To ograniczenie mo�e by� dokonane poprzez [2,17]: 1. pomijanie niektórych zmiennych i reguł interakcji. W badaniach systemów naturalnych wpływ pewnych zmiennych i ich wzajemnej zale�no�ci jest bardziej znacz�cy, ni� innych. Zakładaj�c, �e te drugorz�dne czynniki w niewielkim stopniu wpływaj� na funkcjonowanie systemu w badanym segmencie, mo�na je pomin�� w ostatecznej wersji modelu fizycznego. 2. zast�powanie kilku zmiennych deterministycznych przez jedn� zmienn� losow�. W pierwszym etapie modelowania przyjmuje si� model, w którym reguły interakcji s� deterministyczne, a nast�pnie wprowadza si� czynnik losowy. 3. uogó1nienie zakresu jednej lub kilku zmiennych. W opisie modelu fizycznego uwzgl�dnia si� warto�� zmiennej dla pewnej chwili oraz zakres okre�lony przez zbiór wszystkich warto�ci jakie ta zmienna ma�e przyjmowa�. 4. grupowanie elementów modelu cybernetycznego w zbiory i opis ka�dego zbioru przez jedn� zmienn� uogólnion�. Oznacza to, �e zmienne modelu fizycznego b�d� okre�la� pewne zbiory elementów modelu cybernetycznego. Zakresy tych zmiennych s� na ogół mniejsze ni� zakresy podstawowych zmiennych opisowych.
Wykorzystuj�c prawa fizyki oraz zasady modelowania te zmienne oraz elementy składu i struktury nale�y zestawi� w relacjach matematycznych, które uwzgl�dni� reguły interakcji. W ten sposób mo�na utworzy� sformalizowany opis modelu fizycznego, który jest ilo�ciow� reprezentacj�: 1). własno�ci, procesów i zwi�zków uwzgl�dnionych w modelu cybernetycznym, nale��cych do badanego segmentu systemu; 2). fragmentów składu i struktury systemu odpowiedzialnych za ich realizacj�.
Utworzenie modelu fizycznego systemu technicznego wymaga gruntownej znajomo�ci jego funkcjonowania, bez wzgl�du na to, czy system istnieje w postaci materialnej, czy te� jest tylko produktem wyobra�ni twórcy. Model fizyczny jest abstrakcyjn� modyfikacj� modelu cybernetycznego, która odzwierciedla system tylko w badanym segmencie. Opis sformalizowany zawsze dotyczy takiego modelu fizycznego. Model matematyczny
Zmienno�� w czasie obserwowanych w naturze zjawisk, obiektów i sytuacji jest obecnie powszechnie akceptowana. Konsekwencj� tego jest dynamika systemów, która ujawnia si� w postaci zmienno�ci ich własno�ci, składu i struktury oraz zachodz�cych w nich
procesów i zwi�zków. Oznacza to, �e zmienne wyst�puj�ce w modelach tych systemów, s� zale�ne od czasu. Ta zale�no�� ma na ogół posta� funkcji, w których czas jest zmienn� niezale�n�. Okre�lenie czasu jako zmiennej niezale�nej nie ma nic wspó1nego z fizycznymi przyczynami lub skutkami zmiennych zale�nych, ale jest po��dane dla odzwierciedlenia dynamiki modelowanego systemu.
Sposób odzwierciedlenia dynamiki w modelu matematycznym zale�y od fizycznego charakteru własno�ci procesów i zwi�zków zachodz�cych w modelowanym segmencie. Dynamiczny model matematyczny pozwala bada� zachowanie systemu, zarówno w stanie równowagi jak i po zadziałaniu jakiego� zaburzenia, np. wymuszenia na wej�ciu, które spowoduje, �e system przejdzie do innego stanu równowagi. Model dynamiczny, jako odzwierciedlenie systemu technicznego, jest szczegó1nie u�yteczny, gdy badania dotycz�: 1). stabilno�ci, 2). procesów przejsciowych, takich jak np. rozruch czy zatrzymanie, 3). niestabilno�ci, b�d�cej rezultatem zmian struktury systemu, a nie wymusze� na wej�ciu.
W wi�kszo�ci przypadków uwzgl�dnienie dynamiki systemu w opisie sformalizowanym jest konieczne dla zachowania wymaganej prawdziwo�ci modelu matematycznego. Jednak w pewnych okoliczno�ciach dynamika mo�e zosta� pomini�ta. Utworzony wtedy model statyczny jest uproszczeniem, które jest dopuszczalne pod warunkiem, ze badacz pragnie prze�ledzi� tylko pewne stany równowagi, osi�gane w specyficznych warunkach.
Czasoprzestrze�, w której istniej� i funkcjonuj� systemy naturalne mo�e by� modelowana w sposób ci�gły lub dyskretny. Czas, który jest zmienn� niezale�n� w funkcjach stanu, wej�cia i wyj�cia, jest wielko�ci� ci�gł� z natury. Tym niemniej, w modelach matematycznych systemów dynamicznych, czas mo�e by� przedstawiony w sposób ci�gły lub dyskretny. Poj�cie "ci�gły" oznacza, �e wspomniane funkcje s� okre�lone w ka�dej chwili, w ka�dym punkcie na osi czasu. Poj�cie "dyskretny" odnosi si� do zbiorów warto�ci okre�lonych tylko dla pewnych chwil. Konsekwencj� tego jest pewna sko�czona odległo�� na osi czasu, mi�dzy ró�nymi elementami zbiorów stanu, wej�cia lub wyj�cia.
Modelami matematycznymi systemów dyskretnych i ci�głych s� najcz��ciej układy równa�. Własno�ci, procesy i zwi�zki, które zostały odzwierciedlone w modelu fizycznym, s� zapisywane w tych równaniach w postaci zale�no�ci matematycznych. Najprostsz� zale�no�ci� jest proporcjonalno��, która da si� zapisa� w postaci funkcji liniowej. Obrazem funkcji f(t) w układzie prostok�tnych współrz�dnych kartezja�skich jest linia prosta. Ogó1nie bior�c mo�na stwierdzi�, �e je�eli sformalizowany opis modelu fizycznego jest utworzony z funkcji liniowych, to uzyskany model matematyczny jest tak�e liniowy.
Liniowo�� pozwala na utworzenie modelu matematycznego w postaci układu równa� liniowych (algebraicznych lub ró�niczkowych), zapewnia mo�liwo�� wykonywania podstawowych operacji algebraicznych (dodawanie, odejmowanie, mno�enie i dzielenie) oraz pozwala na wybór elementu zerowego, przy wektorowym opisie wej�cia, stanu lub wyj�cia systemu. Dlatego, model liniowy jest stosunkowo łatwy do rozwi�zania na drodze analitycznej.
Zło�ono�� badanych systemów powoduje jednak, �e zapisanie zale�no�ci za pomoc� funkcji liniowych, przy równoczesnym zachowaniu wymaganego poziomu prawdziwo�ci modelu, jest cz�sto trudne lub wr�cz niemo�liwe. W konsekwencji model matematyczny musi byt nieliniowy i jego rozwi�zanie mo�e nastr�cza� powa�ne trudno�ci. Aby uzyska� rozwi�zanie i osi�gn�� cel bada�, konieczna jest wtedy linearyzacja modelu, polegaj�ca na zast�powaniu, zale�no�ci nieliniowych - liniowymi.
Zmienne opisowe modelu mo�na sklasyfikowa� według dwóch kryteriów: fizycznego i matematycznego.
Według kryterium fizycznego, mo�na wyró�ni� trzy grupy zmiennych, przy czym

dwie pierwsze grupy opisuj� własno�ci, procesy i zwi�zki zachodz�ce w systemie, jego dynamik� i wzajemne oddziaływanie systemu i �rodowiska. Te trzy grupy zmiennych to: 1. zmienne wej�ciowe opisuj�ce wymuszenia działaj�ce na system; mo�na je dodatkowo podzieli� na zmienne kontrolowane, zwane równie� decyzyjnymi, na które badacz ma wpływ i niezale�ne od badacza zmienne sytuacyjne, 2. zmienne stanu i wyj�cia; niezale�nie od "lokalizacji" w modelu fizycznym, charakteryzuj� one nieznane reakcje systemu (ł�cznie zwane niekiedy stanem), które interesuj� badacza ze wzgl�du na cel bada�, 3. zmienne pomocnicze, opisuj�ce po�rednie zale�no�ci mi�dzy zmiennymi wej�ciowymi oraz reakcjami, a słu�� do uproszczenia zapisu zale�no�ci wyst�puj�cych w modelu.
Według kryterium matematycznego, zmienne opisowe modelu mo�na podzieli� na dwie grupy, a mianowicie: 1. funkcje czasu Zr(t), b�d� innej zmiennej niezale�nej, które w sensowny sposób przyporz�dkowuj� ka�demu zdarzeniu wielko�� o ustalonej nazwie i reprezentuj� zmienne wej�cia, wyj�cia i stanu. Maj� one bezpo�redni wpływ na zachowanie badanego segmentu systemu; odpowiednio uporz�dkowane w szereg, funkcje te tworz� wektor: z(t) = [z1(t), z2(t), ..., zr(t), ..., zΓ1(t)]T (7) W zale�no�ci ad fizycznego charakteru modelowanego systemu i przyj�tego sposobu opisu, współrz�dne zr(t), mog� by� funkcjami zdeterminowanymi, probabilistycznymi lub stochastycznymi. Do opisu sformalizowanego dynamicznych zmian wielko�ci fizycznych, zachodz�cych podczas funkcjonowania systemu, wykorzystuje si� pochodne po czasie wektora z(t) lub jego współrz�dnych zr(t); 2. parametry sξ, które s� wielko�ciami odgrywaj�cymi szczegó1n� rol� w sformalizowanym opisie modelu fizycznego. Ich natura fizyczna czyni je zmiennymi, ale w danym modelu matematycznym pozostaj� stałe. W badaniach systemów technicznych parametry te tworz� zbiór wielko�ci, które opisuj� skład i struktur� badanego segmentu systemu. Mo�na z tych wielko�ci utworzy� wektor:
Tsssss ],...,,...,,[ 21 Θ= ξ (8)
gdzie: ξ = 1 ,2, ..., Θ - sko�czony ci�g indeksów. Przytoczona klasyfikacja jest konsekwencj� fizycznego charakteru modelowanego
segmentu i celu bada� oraz uproszcze� poczynionych przy budowie modelu fizycznego. Zakładaj�c, �e istnieje operator Ψ(t), dla którego zmienne oraz parametry mo�na
zapisa� w postaci wektorów, to ogó1n� posta� modelu matematycznego mo�na przedstawi� jako zmodyfikowan� form� w postaci:
0],,)(
,)(
),()[( 2
2
=Ψ tsdt
tzddt
tdztzt (9)
Wyra�enie to przedstawia ogóln�, ró�niczkow� posta� zapisu modelu matematycznego, który jest odzwierciedleniem modelu fizycznego, badanego segmentu systemu technicznego.
W zale�no�ci od postaci zmiennych opisowych, operatora Ψ(t) oraz parametrów sξ, model mo�e by� równaniem lub układem równa�: algebraicznych, ró�niczkowych zwyczajnych lub cz�stkowych, pierwszego lub wy�szego rz�du; mo�e to by� model deterministyczny, losowy, stochastyczny, statyczny lub dynamiczny, dyskretny lub ci�gły, liniowy lub nieliniowy itd.
U�yteczny model matematyczny, powinien zapewnia�[26]: - istnienie i jednoznaczno�� rozwi�zania równa�, z których jest zbudowany, - mo�liwo�� uzyskania wyników ilo�ciowych, - mo�liwo�� empirycznego porównania tych wyników z wielko�ciami wytwarzanymi przez
modelowany system. Modele matematyczne, uzyskane w rezultacie omówionego procesu modelowania,
pozwalaj� rozwi�zywa� zadania analizy, identyfikacji i syntezy. Zadania analizy polegaj� na wyznaczeniu zmiennych stanu i wyj�cia modelu
fizycznego w zale�no�ci od zmiennych wej�ciowych. W praktyce s� to zadania: 1). wyznaczania warto�ci i przebiegów charakterystyk, okre�laj�cych zachowanie modelowanego systemu, 2). wyznaczania pewnych charakterystyk w funkcji parametrów lub zmiennych decyzyjnych, 3). badania stabilno�ci i czuło�ci modelu na zakłócenia; w rezultacie otrzymuje si� informacje o wpływie oddziaływania wybranych wielko�ci wej�ciowych na charakterystyki systemu, 4). ocena systemu, która polega na porównaniu rzeczywistych charakterystyk z postawionymi wymaganiami, 5). badania poznawcze, maj�ce na celu wykrycie nieznanych dot�d praw i zale�no�ci, zachodz�cych pomi�dzy oddziaływaniem �rodowiska i reakcj� systemu.
Zadania identyfikacji polegaj� na wyznaczeniu takich parametrów i struktury modelu matematycznego, które dla danych zmiennych wej�ciowych umo�liwi� otrzymanie przebiegów zmiennych stanu i wyj�cia takich samych jak te, które wytwarza system. Informacje a rzeczywistych wielko�ciach wej�cia, stanu i wyj�cia badanego systemu uzyskuje si� na drodze empirycznej.
Zadania syntezy polegaj� na wyznaczaniu optymalnych warto�ci parametrów i struktur modelu matematycznego lub zmiennych decyzyjnych oraz na sterowaniu procesami zachodz�cymi w modelu. Zadania syntezy dostarczaj� informacji dla zaprojektowania systemu technicznego, który b�dzie realizowa� zadanie eksploatacyjne w sposób optymalny. Pewna grupa zada� syntezy zajmuje si� sterowaniem procesami eksploatacji istniej�cych systemów. Rezultatem rozwi�zywania zada� nale��cych do tej grupy s� informacje, które umo�liwiaj� podejmowanie racjonalnych decyzji podczas sterowania systemu oraz zapewniaj� optymalny sposób jego obsługiwania. 5. MODELE MATEMATYCZNE SYSTEMÓW TECHNICZNYCH
Wielko�ci charakteryzuj�ce model fizyczny, wyra�one za pomoc� znaków oraz symboli matematycznych i zapisane w postaci odpowiednio sformułowanych warunków równo�ci lub nierówno�ci, stanowi� jego opis sformalizowany. Te warunki to s� dane i niewiadome zgodnie z prawami fizyki, które okre�laj� zachowanie systemu w wybranym do bada� segmencie.
Ogólnie bior�c, opis sformalizowany modelu fizycznego systemu mechanicznego, polega na zapisaniu zgodnie prawami mechaniki, zale�no�ci które ł�cz� przyspieszenia z poło�eniami oraz z pr�dko�ciami uogólnionymi i równocze�nie wi��� ruch systemu z oddziaływaniami mechanicznymi, które gwarantuj� realizacj� tego ruchu.
Wielko�ci tworz�ce współrz�dne uogólnione oraz ich pochodne, a tak�e siły i momenty s� elementami podzbioru, który okre�la przestrze� zmiennych w modelu fizycznym. Ogóln� posta� modelu matematycznego takiego systemu mo�na zapisa� w postaci:
0),,,,,,,,,,,( 2
2
2
2
=Ψ tsMMRPdtd
dtd
dtqd
dtdq
q RP
ϕϕϕ (10)
W zale�no�ci od celu bada�, model mo�e zosta� zapisany dla całego systemu lub dla poszczególnych elementów. Mo�e on odzwierciedla� system mechaniczny uwzgl�dniaj�c statyk�, kinematyk� lub dynamik� własno�ci, procesów lub zwi�zków. Dla odzwierciedlenia statyki systemu, model (10) jest na ogół układem równa� algebraicznych. Dla odzwierciedlenia kinematyki i dynamiki potrzebne s� równania ró�niczkowe pierwszego lub drugiego rz�du, zwane równaniami ruchu.
Aby wyznaczy� stan badanego systemu, model musi si� składa� z tylu równa� ruchu ile jest niewiadomych; rozwi�zywanie modelu polega na całkowaniu tych równa�. Rezultatem całkowania s� funkcje czasu, które okre�laj� zmiany poszukiwanych wielko�ci.
Znaj�c warunki pocz�tkowe lub brzegowe mo�na wyznaczy� ich warto�ci. Całkuj�c równania (10) mo�na rozwi�zywa� dwa typy zada�. Zadania, których celem
jest wyznaczenie głównego wektora oddziaływa� dla danego ruchu systemu, nosz� one miano pierwszego zadania mechaniki. W tym zadaniu, poszukiwane siły i momenty s� nieznanymi zmiennymi. Dane s� poło�enia i pr�dko�ci wzgl�dem współrz�dnych uogólnionych elementów badanego systemu, które zostały uwzgl�dnione w modelu fizycznym. Drugie zadanie mechaniki dotyczy przypadków wyznaczania ruchu systemu, gdy dane s� oddziaływania. W tym zadaniu dane s� siły i momenty, a poszukiwane poło�enia i pr�dko�ci [20].
Zmienno�� w czasie jest jedn� z najwa�niejszych własno�ci, która okre�la dynamik� systemów naturalnych. Istota dynamicznego zachowania polega na tym, �e na wyj�cie i stan systemu w chwili bie��cej, maj� wpływ wielko�ci wej�cia w chwilach wcze�niejszych. System "pami�ta" to co dzieje si� wcze�niej. Na przykład, wzrost ro�liny w danej chwili lub przedziale czasu zale�y od nasłonecznienia i opadów w okresie poprzedzaj�cym obserwacj�. Model matematyczny odzwierciedla t� zdolno�� do "magazynowania" energii lub informacji i do ich "zwrotu" z pewnym opó�nieniem.
Badanie systemów naturalnych (a w szczególno�ci - technicznych), z uwzgl�dnieniem ich dynamiki, jest podstawowym zadaniem modelowania. Ze wzgl�dów praktycznych, takie systemy s� najcz��ciej modelowane w uj�ciu deterministycznym. Ta klasa matematycznych modeli technicznych systemów dynamicznych, które potocznie s� nazywane modelami dynamicznymi, a tak�e klasa modeli statycznych, które s� specyficznym uproszczeniem modeli dynamicznych, b�dzie tematem dalszych rozwa�a�. 5.1 Modele dynamiczne
Zmienne uwzgl�dnione w modelu fizycznym, tworz� zbiór zmiennych opisowych modelu matematycznego. W rezultacie uproszcze� poczynionych przy przej�ciu od modelu cybernetycznego do fizycznego, liczno�� tego podzbioru b�dzie mniejsza. Wektory wej�cia, stanu i wyj�cia w modelu matematycznym b�d� utworzone ze znacznie mniejszej liczby współrz�dnych. Postulat kompletno�ci modelu matematycznego wymaga aby te zmienne oraz zbiory , do których one nale�� były dokładnie opisane [26].
Podział zmiennych opisowych modelu według kryterium fizycznego na: wej�ciowe, stanu i wyj�ciowe, wynika nie tylko z kierunku przepływu strumieni materiałów czy energii. W badaniach systemów dynamicznych ten podział jest konsekwencj�: zdolno�ci do "magazynowania" energii lub informacji i do ich "zwrotu" z opó�nieniem oraz zale�no�ci przyczynowo-skutkowych własno�ci, procesów i zwi�zków.
Postulat obserwowalno�ci, który zapewnia mo�liwo�� weryfikacji modelu na podstawie pomiarów wykonywanych na modelowanym systemie wymaga, aby zmienne wyj�ciowe mo�na było obja�nia�, obserwowa� i mierzy� (np. w badaniach dynamiki systemów technicznych mo�na mierzy� siły, odkształcenia, przyspieszenia itp.).
Modele matematyczne dynamicznych systemów technicznych s� tworzone przy wykorzystaniu uznanych w fizyce praw lub zasad zachowania. Te prawa i zasady okre�laj� reguły interakcji i s� podstaw� układania równa�, które przedstawiaj� wzajemne zale�no�ci zmiennych wej�cia, stanu i wyj�cia. Deterministyczny model matematyczny składa si� na ogół z układu równa� i zawsze reprezentuje jedn� lub kilka relacji odwzorowania wej�cia, stanu i wyj�cia. Postulat u�yteczno�ci modelu wymaga aby istniało jednoznaczne rozwi�zanie takiego układu równa�.
Posta� równa� jest zale�na od celu modelowania, od składu i struktury modelu fizycznego, od własno�ci, procesów i zwi�zków, które zostały w nim odzwierciedlone, ale równie� od przewidywanego sposobu ich rozwi�zywania. Równania tworz�ce model mog� by� algebraiczne lub ró�niczkowe, zwyczajne lub cz�stkowe, pierwszego lub wy�szego rz�du,
zawieraj�ce funkcj� niewiadom� jednej lub wi�cej zmiennych. 5.2 Modele statyczne
Zale�no�� systemu od czasu nie przes�dza o tym, �e jego model b�dzie dynamiczny; wystarczy uwzgl�dni� zale�no�ci tylko mi�dzy wielko�ciami u�rednionymi i w opisie sformalizowanym czas mo�e w ogó1e nie wyst�powa�. Podstawiaj�c pochodne zmiennych niezale�nych od czasu, równe zero równanie (8) mo�na przekształci� do postaci reprezentuj�cej model statyczny:
φ { z , s } = 0 (11) Modele statyczne wykorzystuje si� do bada� systemów o ci�głym, powolnym
przepływie materiałów i energii jak np.: funkcjonuj�ce w cyklu rocznym systemy zbiorników retencyjnych zasilane opadami i odprowadzaj�ce wod� do rzek, systemy produkcji masowej itp. Modele statyczne dobrze odzwierciedlaj� systemy zmienne w czasie, ale pozostaj�ce w równowadze, np. konstrukcje mechaniczne. S� one wykorzystywane w badaniach operacyjnych, słu��cych do podejmowania decyzji w systemach sieciowych, np.: obsługi masowej, podziału ograniczonych zasobów, wyznaczania �cie�ek krytycznych przemieszczania si� w sieci tak, aby koszty lub czas były minimalne. W modelach takich systemów zamiast zmiennych wej�cia i wyj�cia stosuje si� zazwyczaj zmienne decyzyjne i funkcje celu. 5.3 Notacje modeli dynamicznych
Podstaw� opisu stanu dynamicznego jest tworzenie mo�liwych typów modeli, a mianowicie: "wej�cie - stan - wyj�cie", który jest równowa�ny typowi "wej�cie-reakcja" oraz "wej�cie-stan", "wej�cie-wyj�cie" i "stan-wyj�cie". Ogóln� notacj� modelu typu "wej�cie- stan -wyj�cie" dla systemu dynamicznego, mo�na uzyska� zapisuj�c odpowiednio relacj� : ],),(),([)( sttxtuty ψ= (12) W zale�no�ci tej, ψ - jest macierz�, niezale�n� od czasu, która reprezentuje odwzorowanie współrz�dnych wektora stanu i wej�cia we współrz�dne wektora wyj�cia. W systemach technicznych parametrami s� wielko�ci opisuj�ce skład i struktur� systemu takie, jak np.: wymiary konstrukcyjne, współczynniki i warto�ci charakteryzuj�ce zachodz�ce procesy itp.
Zakładaj�c, �e zale�no�� od parametrów zostanie w sposób niejawny uwzgl�dniona w niezale�nej od czasu macierzy ψs równanie to mo�na zapisa� w postaci:
y(t) = ψs [u(t),x(t)] (13) W postaci skalarnej równanie to przedstawia układ równa�, którego charakter jest zale�ny od postaci macierzy ψs i współrz�dnych wektorów.
Aby utworzy� model typu "wej�cie - stan", nale�y okre�li� taki najmniejszy zbiór zmiennych stanu, który w danej chwili t niesie cał� informacj� o przeszło�ci systemu; niezmiennikiem jest liczba elementów tego zbioru. Ogó1n� posta� modelu "wej�cie - stan" mo�na przedstawi� w postaci układu równa� ró�niczkowych rz�du pierwszego:
],),(),([)(
sttutxGdt
tdx = 0)0( xx = (14)
gdzie: G - jest macierz� odwzorowania pochodnych współrz�dnych wektora stanu we współrz�dne tego wektora oraz wektora wej�cia.
Po prawej stronie równa� nie wyst�puj� pochodne po czasie zmiennych modelu. Mog� natomiast wyst�powa� pochodne tych zmiennych wzgl�dem zmiennych przestrzennych.
Zakładaj�c, �e zale�no�� od parametrów jest w sposób niejawny uwzgl�dniona w macierzy Gs układ równa� (14) mo�na upro�ci� do postaci:
)](),([)(
tutxGdt
tdxs= 0)0( xx = (15)

Ze wzgl�du na wyst�powanie pochodnych (mog� to by� równie� pochodne rz�du wy�szego ni� pierwszy), układ równa� (15) dobrze odzwierciedla dynamik� systemu. Jako cało��, układy równa� (15) i (13) tworz� kompletny, deterministyczny model matematyczny badanego systemu dynamicznego.
Model matematyczny typu "wej�cie - wyj�cie" zakłada, �e system przekształca wektor wej�cia w wektor wyj�cia. Zakładaj�c, �e operator Φ działa jak funkcja ϕ(.) niezale�na od czasu, model dla relacji "wej�cie - wyj�cie" mo�na zapisa� w postaci równania ró�niczkowego, wektorowego:
2102120 :],,[:)(],,[:)(, tttgdziettttysttttudtdu
��∈=���
��� ∈φ (16)
Zgodnie z tym równaniem przebieg zmiennej wej�ciowej w przedziale czasu [t0, t2] ma wpływ na przebieg zmiennej wyj�ciowej w przedziale czasu [t1, t2], przy czym chwila t0 jest czasami du�o wcze�niejsza od chwili t1 .
Zale�no�� (16) zapisana za pomoc� wielko�ci skalarnych, przyjmuje posta� układu równa� ró�niczkowych, które poddaje si� niekiedy przekształceniu Laplace'a, uzyskuj�c ich algebraiczn� reprezentacj�, łatwiejsz� do rozwi�zania. Rezultat tego ma na ogół posta� transmitancji, która dobrze opisuje własno�ci dynamiczne systemu.
Model ten mo�na równie� bada� w dziedzinie cz�stotliwo�ci, wykorzystuj�c transformacj� Fouriera. Rozwi�zanie modelu przedstawia wtedy funkcj� transmitancji w dziedzinie cz�stotliwo�ci. Ta funkcja umo�liwia wyznaczenie charakterystyk amplitudowych i fazowych w funkcji cz�stotliwo�ci, które dobrze opisuj� zachowanie systemu dynamicznego.
Model "wej�cie - wyj�cie" jest wykorzystywany w badaniach systemów typu "czarna skrzynka". Ten typ modelu mo�e równie� by� utworzony w postaci statycznej. 6. ZAŁO�ENIA DO BADA� MODELI
Rzeczywiste układy mechaniczne to układy masowo – dyssypacyjno - spr��yste opisywane za pomoc� przemieszcze�, ich pochodnych zwi�zanych z odkształceniami oraz wywołuj�cymi je siłami. Wielko�ci opisuj�ce s� ze sob� sprz��one, s� zmienne w czasie i nazywane s� w dynamice maszyn sygnałami. Sygnały przemieszcze�, pr�dko�ci i przyspiesze� oraz działaj�cych sił maj� charakter uogólniony, tzn. przemieszczenia s� zarówno translacyjne jak i rotacyjne, a siły s� skupione i pary sił s� reprezentowane przez ich momenty. Równania ruchu, opisuj�ce drgania dyskretnego modelu fizycznego, maj� w ogólnym przypadku posta� [20,26,36,54]:
0),,...,...,,,,...,,...,,,,...,,...,,,,...,,( 21
....
2
..
1
...
2
.
1
.
21 =tRRRRqqqqqqqqqqqF wininink (17) gdzie: n - liczba stopni swobody, w – liczba wi�zów, t – czas, Rj – j-ta nieznana siła
uogólniona (reakcja), qi – i-te przemieszczenie, iq.
- i-ta pr�dko�� uogólniona, iq..
- i-te przy�pieszenie uogólnione. Przy modelowaniu dynamicznych własno�ci układów mechanicznych stosuje si� szereg uproszcze� w zakresie opisu i zasad budowy modeli fenomenologicznych.
W celu modyfikacji własno�ci dynamicznych układów mechanicznych buduje si� modele strukturalne, które odzwierciedlaj� organizacj� wewn�trzn� i zachowuj� własno�ci transformacyjne układu.
Ka�dy układ mechaniczny zło�ony jest z elementów: masowych (punkty materialne, nieodkształcalne lub odkształcalne bryły), spr��ystych (spr��yny) i tłumi�cych (np. tłumiki). Mówi si� wi�c o układach m, k, c (masowo – dyssypacyjno - spr��ystych). Tylko w uproszczeniu mo�na mówi� o modelu masowym, masowo-spr��ystym lub masowo-

dyssypacyjnym. Ka�dy układ (model), posiadaj�cy własno�ci spr��yste wytr�cony z poło�enia równowagi, b�dzie realizował ruch przemienny wokół poło�enia równowagi. Taki ruch nazywamy drganiami mechanicznymi.
Drgania mechaniczne w zale�no�ci od: liczby stopni swobody układu, równania (równa�) opisuj�cego ruch, sposobu wytr�cenia z poło�enia równowagi (sposobu wymuszenia), modelu układu, charakteru sygnału przemieszcze� i kierunku ruchu dzielimy na [7,14,36,54]: - drgania układów o jednym stopniu swobody, o wielu stopniach swobody - drgania układów dyskretnych: o niesko�czonej liczbie stopni swobody - drgania układów ci�głych; - drgania liniowe; nieliniowe; - drgania autonomiczne (swobodne); nie autonomiczne (wymuszone: zewn�trznie lub wewn�trznie); - drgania zachowawcze (bez tłumienia); nie zachowawcze (z dyssypacj� energii; lub z tłumieniem); - drgania zdeterminowane; stochastyczne; - drgania wzdłu�ne, poprzeczne, translacyjne, rotacyjne (gi�tne, skr�tne), itp.
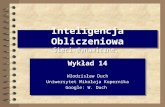
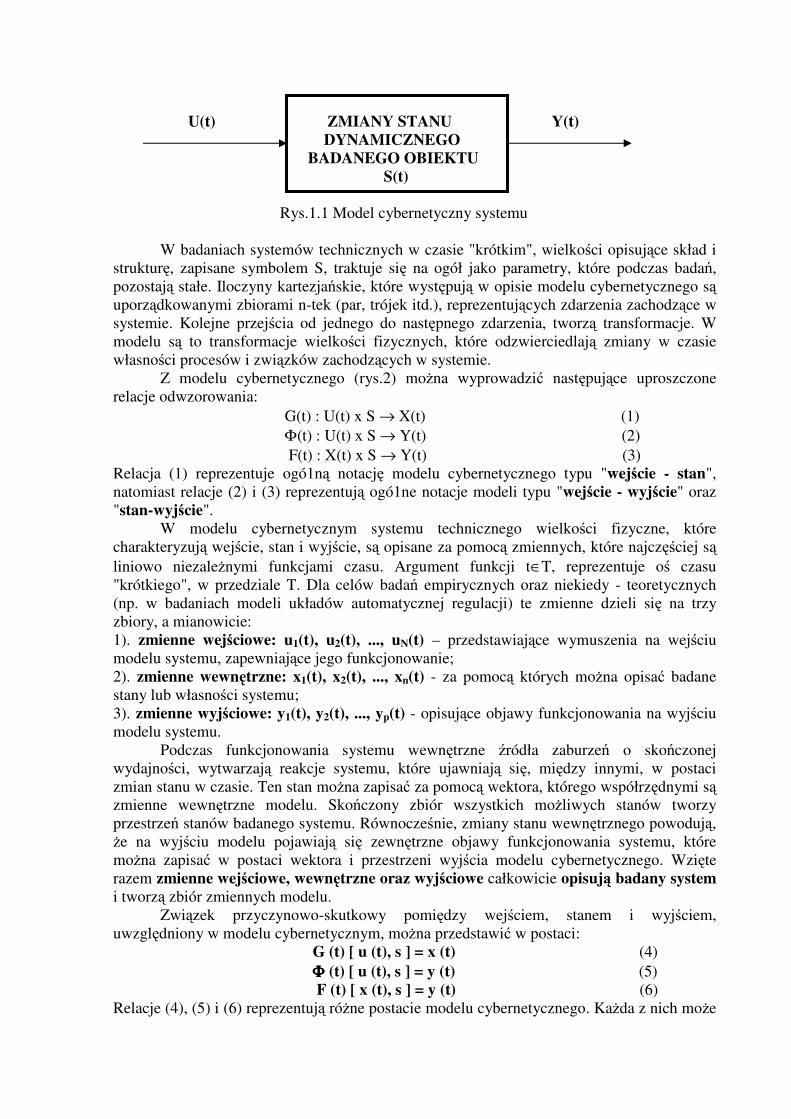
Kluczem do okre�lenia dynamiki obiektów czyli drga� obiektów mechanicznych jest zatem znajomo�� mo�liwych odpowiedzi układu dynamicznego, do którego mo�na zredukowa� badany obiekt. 6.1 Drgania translacyjne i skr�tne W praktycznych zastosowaniach na pocz�tku rozwa�a� modelowane obiekty bada� przedstawiane s� jako elementarne modele drgaj�ce o jednym stopniu swobody. Przykłady takich układów z wymuszeniem siłowym lub momentowym przedstawiono na rys.1.2 [a).model o wymuszeniu siłowym, b). model o wymuszeniu momentowym]. Czy wnioski płyn�ce z analizy drga� typu skr�tnego s� takie same jak dla drga� typu translacyjnego?
Rys.1.2 Schematy modeli fizycznych o jednym stopniu swobody dla drga� translacyjnych a). oraz dla drga� skr�tnych b).
Stosuj�c zasad� d’Alemberta dla ka�dego z modeli otrzymuje si� równania: model translacyjny a). model skr�tny b). � =+ 0bezwli FF � =+ 0bezwlsili MM
.
..
0)( =−−− xmxckxtF 0)(...
=−−− ϕϕϕ ICKtM ostatecznie za�:
)(...
tFkxxcxm =++ )(...
tMKCI =++ ϕϕϕ (18) Otrzymane równania, słuszne nie tylko dla układu o jednym stopniu swobody, s�
identyczne, a wi�c wnioski płyn�ce z analizy ich rozwi�za� b�d� równie� identyczne.
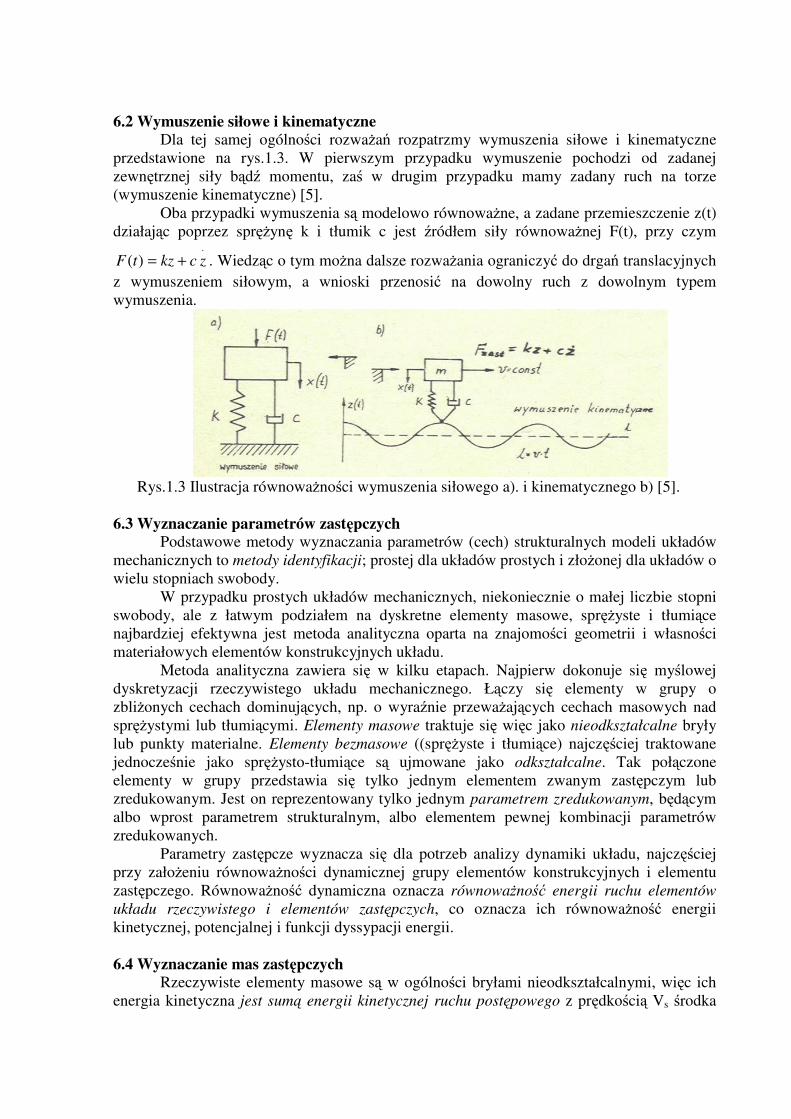
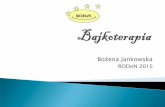
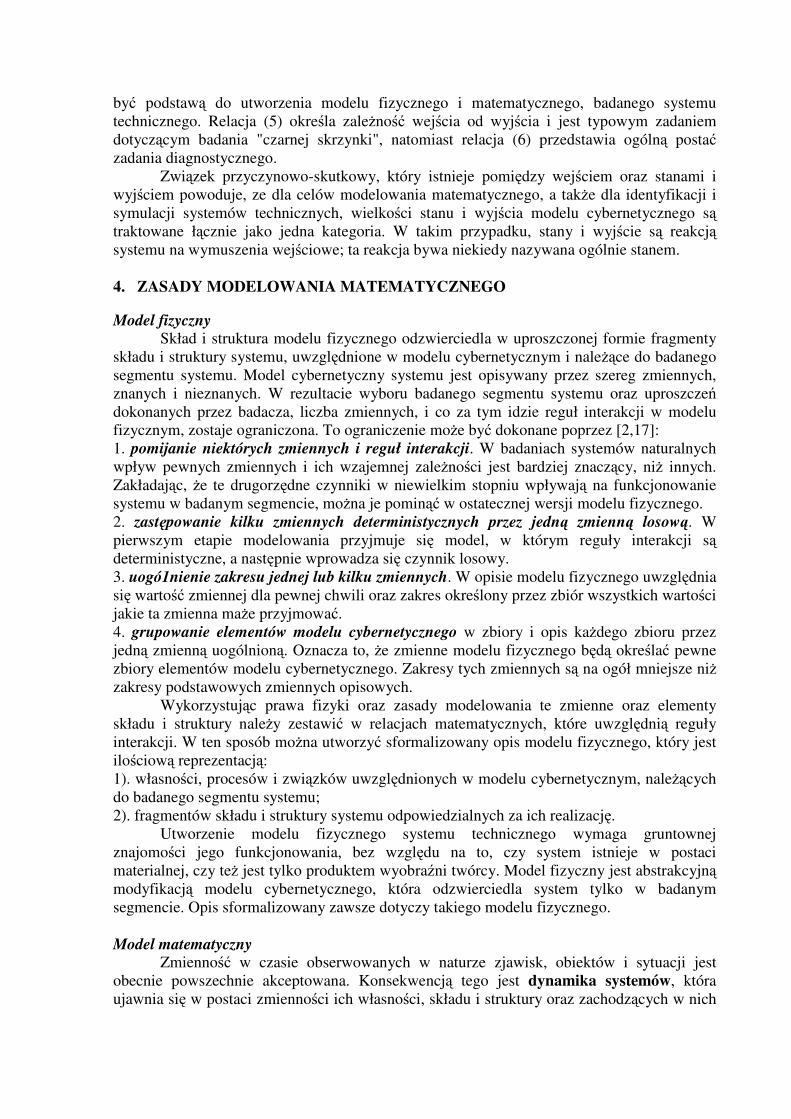
6.2 Wymuszenie siłowe i kinematyczne Dla tej samej ogólno�ci rozwa�a� rozpatrzmy wymuszenia siłowe i kinematyczne przedstawione na rys.1.3. W pierwszym przypadku wymuszenie pochodzi od zadanej zewn�trznej siły b�d� momentu, za� w drugim przypadku mamy zadany ruch na torze (wymuszenie kinematyczne) [5]. Oba przypadki wymuszenia s� modelowo równowa�ne, a zadane przemieszczenie z(t) działaj�c poprzez spr��yn� k i tłumik c jest �ródłem siły równowa�nej F(t), przy czym
.
)( zckztF += . Wiedz�c o tym mo�na dalsze rozwa�ania ograniczy� do drga� translacyjnych z wymuszeniem siłowym, a wnioski przenosi� na dowolny ruch z dowolnym typem wymuszenia.
Rys.1.3 Ilustracja równowa�no�ci wymuszenia siłowego a). i kinematycznego b) [5]. 6.3 Wyznaczanie parametrów zast�pczych
Podstawowe metody wyznaczania parametrów (cech) strukturalnych modeli układów mechanicznych to metody identyfikacji; prostej dla układów prostych i zło�onej dla układów o wielu stopniach swobody.
W przypadku prostych układów mechanicznych, niekoniecznie o małej liczbie stopni swobody, ale z łatwym podziałem na dyskretne elementy masowe, spr��yste i tłumi�ce najbardziej efektywna jest metoda analityczna oparta na znajomo�ci geometrii i własno�ci materiałowych elementów konstrukcyjnych układu.
Metoda analityczna zawiera si� w kilku etapach. Najpierw dokonuje si� my�lowej dyskretyzacji rzeczywistego układu mechanicznego. Ł�czy si� elementy w grupy o zbli�onych cechach dominuj�cych, np. o wyra�nie przewa�aj�cych cechach masowych nad spr��ystymi lub tłumi�cymi. Elementy masowe traktuje si� wi�c jako nieodkształcalne bryły lub punkty materialne. Elementy bezmasowe ((spr��yste i tłumi�ce) najcz��ciej traktowane jednocze�nie jako spr��ysto-tłumi�ce s� ujmowane jako odkształcalne. Tak poł�czone elementy w grupy przedstawia si� tylko jednym elementem zwanym zast�pczym lub zredukowanym. Jest on reprezentowany tylko jednym parametrem zredukowanym, b�d�cym albo wprost parametrem strukturalnym, albo elementem pewnej kombinacji parametrów zredukowanych.
Parametry zast�pcze wyznacza si� dla potrzeb analizy dynamiki układu, najcz��ciej przy zało�eniu równowa�no�ci dynamicznej grupy elementów konstrukcyjnych i elementu zast�pczego. Równowa�no�� dynamiczna oznacza równowa�no�� energii ruchu elementów układu rzeczywistego i elementów zast�pczych, co oznacza ich równowa�no�� energii kinetycznej, potencjalnej i funkcji dyssypacji energii. 6.4 Wyznaczanie mas zast�pczych Rzeczywiste elementy masowe s� w ogólno�ci bryłami nieodkształcalnymi, wi�c ich energia kinetyczna jest sum� energii kinetycznej ruchu post�powego z pr�dko�ci� Vs �rodka

masy oraz energii kinetycznej ruchu obrotowego dookoła osi chwilowego obrotu, przechodz�cej przez �rodek masy.
22
21
21
iiiikz JVmE ω+= (19)
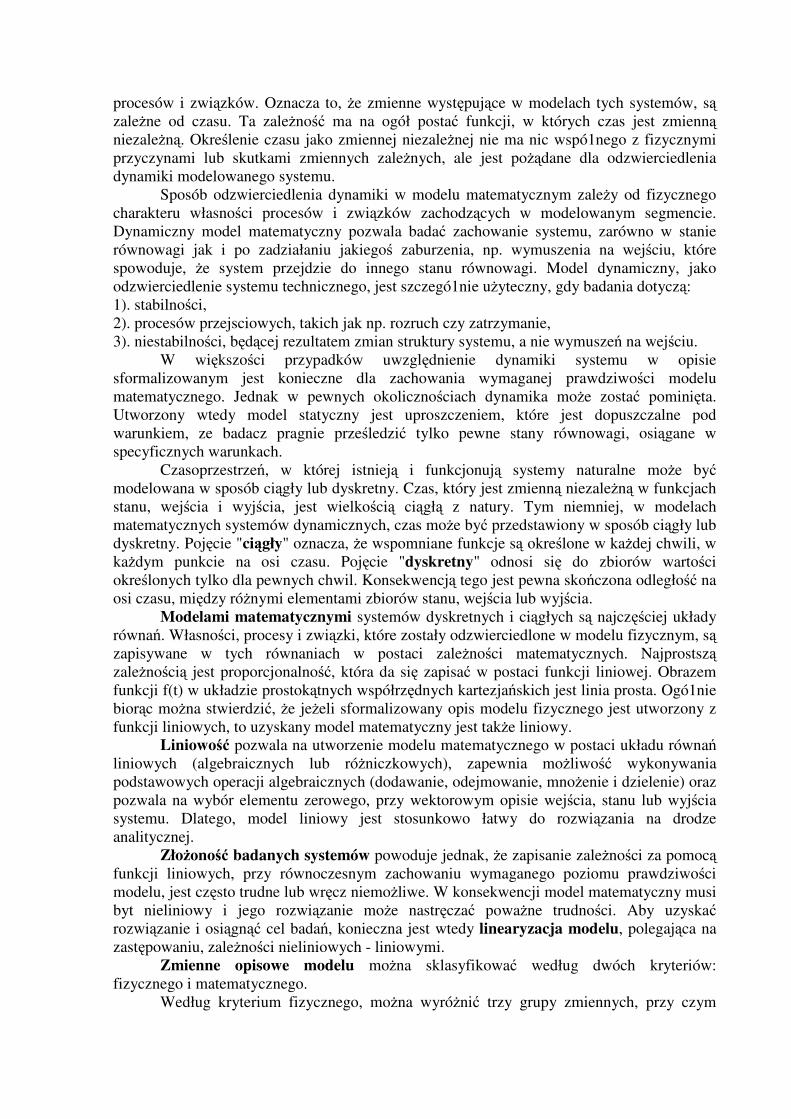
Zast�pczymi elementami masowymi mog� by� albo punkty materialne, albo bryły doskonale sztywne. Zakłada si� najcz��ciej, �e punkty materialne wykonuj� ruch prostoliniowy, a bryły ruch obrotowy dookoła stałej osi. Dokonuj�c redukcji masy korbowodu mechanizmu korbowo-tłokowego (rys.1.4) do dwóch punktów A i B pokrywaj�cych si� z osi� sworznia wału korbowego O oraz z osi� sworznia tłokowego przyjmuje si� oznaczenia: - masa korbowodu mk, - długo�� korbowodu lk, - moment bezwładno�ci Js wzgl�dem osi przechodz�cej przez �rodek masy S odległy od osi
A o a = A S oraz od osi B o b = B S, przy czym a + b = lk.
Rys.1.4 Schemat mechanizmu korbowo - tłokowego. Równowa�no�� dynamiczna energii zachodzi� musi dla dowolnych warto�ci Vs ruchu
post�powego oraz ω ruchu obrotowego, a wi�c równie� dla ich szczególnych warto�ci równych niejednocze�nie zeru. Wynikaj� st�d równania równowa�no�ci mas oraz równowa�no�ci momentów bezwładno�ci wzgl�dem osi przechodz�cej przez �rodek masy S: BAk mmm += dla ω = 0 (20)
22 bmamJ BAS += dla VS = 0 (21) a st�d warto�ci mas zast�pczych mA i mB :
22
2
babmJ
m kSA −
−= (22)
22
2
abamJ
m kSB −
−= (23)
Warunek równowa�no�ci statycznej oznacza równowa�no�� momentów statycznych układu rzeczywistego i zast�pczego: 0=− bmam BA (24) Spełnienie jednocze�nie trzech warunków równowa�no�ci statycznej i dynamicznej wymaga zast�pienia korbowodu trzema punktami materialnymi (A,S,B) i wówczas równania równowagi s� nast�puj�ce:
SBAk mmmm ++= 22 bmamJ BAS += (25)
0=− bmam BA Masy zast�pcze w układzie tym przyjmuj� posta�:
;k
SA al
Jm = ;
k
SB bl
Jm =
abJ
mm SkS −= (26)
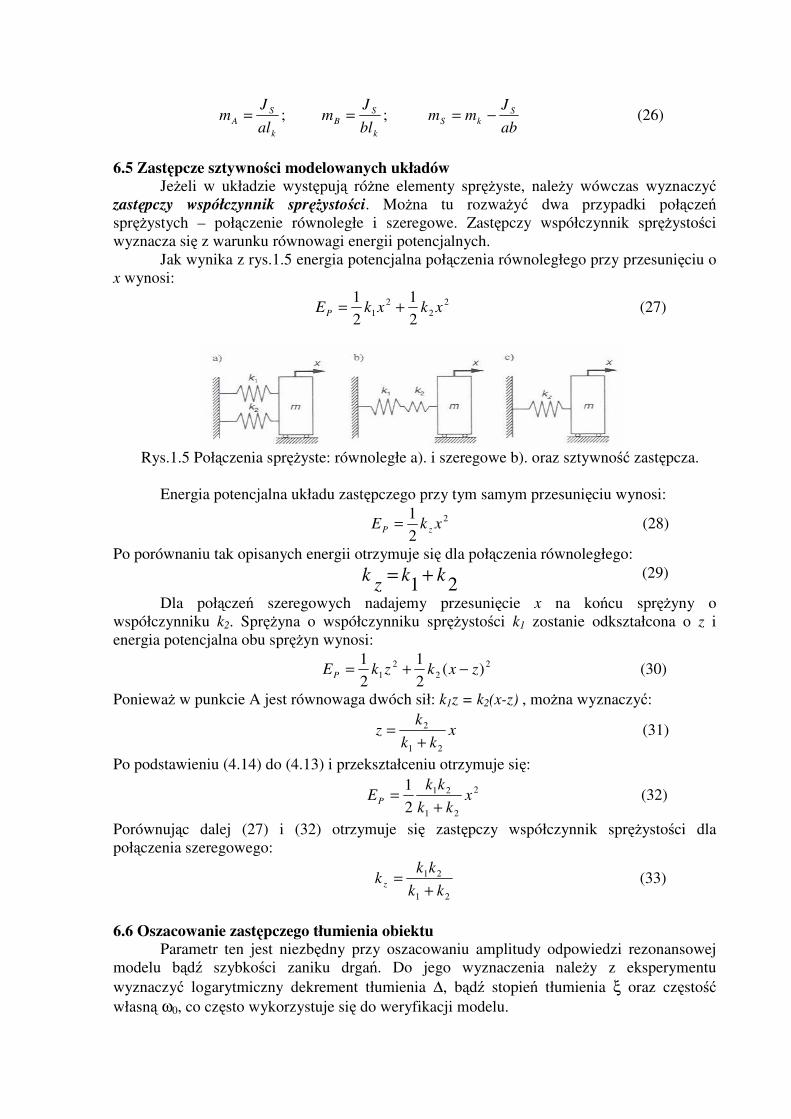
6.5 Zast�pcze sztywno�ci modelowanych układów Je�eli w układzie wyst�puj� ró�ne elementy spr��yste, nale�y wówczas wyznaczy� zast�pczy współczynnik spr��ysto�ci. Mo�na tu rozwa�y� dwa przypadki poł�cze� spr��ystych – poł�czenie równoległe i szeregowe. Zast�pczy współczynnik spr��ysto�ci wyznacza si� z warunku równowagi energii potencjalnych. Jak wynika z rys.1.5 energia potencjalna poł�czenia równoległego przy przesuni�ciu o x wynosi:
22
21 2
121
xkxkEP += (27)
Rys.1.5 Poł�czenia spr��yste: równoległe a). i szeregowe b). oraz sztywno�� zast�pcza.
Energia potencjalna układu zast�pczego przy tym samym przesuni�ciu wynosi:
2
21
xkE zP = (28)
Po porównaniu tak opisanych energii otrzymuje si� dla poł�czenia równoległego:
21 kkzk += (29)
Dla poł�cze� szeregowych nadajemy przesuni�cie x na ko�cu spr��yny o współczynniku k2. Spr��yna o współczynniku spr��ysto�ci k1 zostanie odkształcona o z i energia potencjalna obu spr��yn wynosi:
22
21 )(
21
21
zxkzkEP −+= (30)
Poniewa� w punkcie A jest równowaga dwóch sił: k1z = k2(x-z) , mo�na wyznaczy�:
xkk
kz
21
2
+= (31)
Po podstawieniu (4.14) do (4.13) i przekształceniu otrzymuje si�:
2
21
21
21
xkk
kkEP +
= (32)
Porównuj�c dalej (27) i (32) otrzymuje si� zast�pczy współczynnik spr��ysto�ci dla poł�czenia szeregowego:
21
21
kkkk
k z += (33)
6.6 Oszacowanie zast�pczego tłumienia obiektu Parametr ten jest niezb�dny przy oszacowaniu amplitudy odpowiedzi rezonansowej modelu b�d� szybko�ci zaniku drga�. Do jego wyznaczenia nale�y z eksperymentu wyznaczy� logarytmiczny dekrement tłumienia ∆, b�d� stopie� tłumienia ξ oraz cz�sto�� własn� ω0, co cz�sto wykorzystuje si� do weryfikacji modelu.
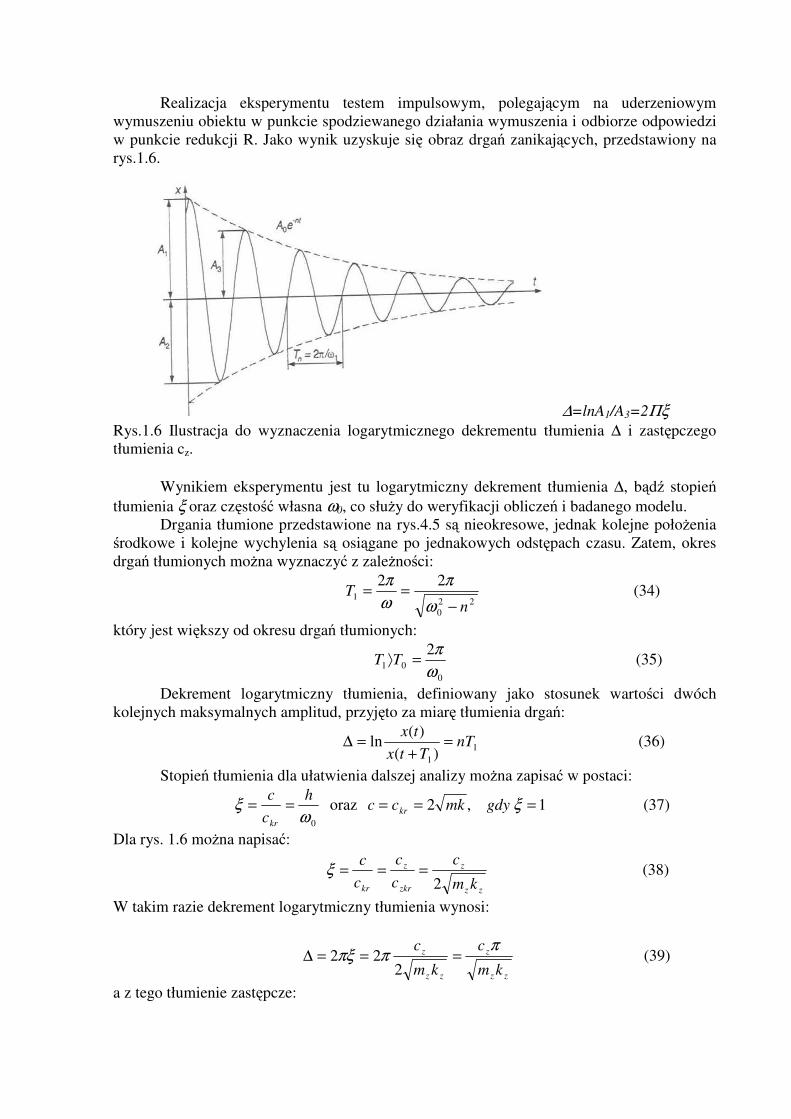
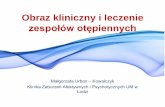
Realizacja eksperymentu testem impulsowym, polegaj�cym na uderzeniowym wymuszeniu obiektu w punkcie spodziewanego działania wymuszenia i odbiorze odpowiedzi w punkcie redukcji R. Jako wynik uzyskuje si� obraz drga� zanikaj�cych, przedstawiony na rys.1.6.
ξΠ==∆ 2ln3
1
AA
∆=lnA1/A3=2Πξ Rys.1.6 Ilustracja do wyznaczenia logarytmicznego dekrementu tłumienia ∆ i zast�pczego tłumienia cz.
Wynikiem eksperymentu jest tu logarytmiczny dekrement tłumienia ∆, b�d� stopie� tłumienia ξ oraz cz�sto�� własna ω0, co słu�y do weryfikacji oblicze� i badanego modelu.
Drgania tłumione przedstawione na rys.4.5 s� nieokresowe, jednak kolejne poło�enia �rodkowe i kolejne wychylenia s� osi�gane po jednakowych odst�pach czasu. Zatem, okres drga� tłumionych mo�na wyznaczy� z zale�no�ci:
22
0
1
22
nT
−==
ωπ
ωπ
(34)
który jest wi�kszy od okresu drga� tłumionych:
0
01
2ω
π=TT (35)
Dekrement logarytmiczny tłumienia, definiowany jako stosunek warto�ci dwóch kolejnych maksymalnych amplitud, przyj�to za miar� tłumienia drga�:
11)(
)(ln nT
Ttxtx =
+=∆ (36)
Stopie� tłumienia dla ułatwienia dalszej analizy mo�na zapisa� w postaci:
0ω
ξ hcc
kr
== oraz 1,2 === ξgdymkcc kr (37)
Dla rys. 1.6 mo�na napisa�:
zz
z
zkr
z
kr km
ccc
cc
2===ξ (38)
W takim razie dekrement logarytmiczny tłumienia wynosi:
zz
z
zz
z
km
c
km
c πππξ ===∆2
22 (39)
a z tego tłumienie zast�pcze:
zzz kmcπ∆= (40)
Znaj�c zatem z eksperymentu dekrement logarytmiczny tłumienia ∆ oraz z dalszych oblicze� zast�pcz� mas� i sztywno�� (mz, kz) mo�na wyznaczy� warto�� zast�pczego tłumienia cz w badanym modelu. Zagadnienia modelowania s� specyficzne dla ró�nych zastosowa�, st�d w dalszej cz��ci tej ksi��ki wielokrotnie przytaczane b�d� ró�ne aspekty podziału i zasad modelowania, co stanowi doskonałe uzupełnienie podanych wcze�niej zasad i specyfiki modelowania. 7. PODSUMOWANIE
Modelowanie stanowi pierwszy etap formalnego uj�cia zagadnie� zwi�zanych zarówno z analiz� działania jak i syntez� obiektów technicznych. Pozwala ono z okre�lonym przybli�eniem odtworzy� zasady organizacji i funkcjonowania obiektu, co dalej umo�liwia uzyskanie informacji o samym modelowanym obiekcie.
Celem modelowania jest uzyskanie wiarygodnego modelu matematycznego, który umo�liwia prze�ledzenie sposobów zachowania si� obiektu w ró�nych warunkach. Przy budowie modelu korzysta si� głównie z praw i aksjomatów fizyki, wyra�aj�cych równowag� sił, momentów, opisuj�cych bilans sił, wydatków, przepływów, z równa� ci�gło�ci i z zale�no�ci geometrycznych. Ka�dy model fizyczny ma odpowiadaj�cy mu model matematyczny. Modelem matematycznym obiektu mechanicznego jest najcz��ciej układ równa� ró�niczkowych o pochodnych cz�stkowych, a tak�e równania całkowe, które opieraj� si� na bilansie energetycznym, materiałowym lub równaniach procesów fizyko-chemicznych. S� one trudne do rozwi�zania zarówno analitycznego jak i przybli�onego (numerycznego). W modelach dyskretnych układów wyst�puj� równania ró�niczkowe zwyczajne i st�d te� s� one cz��ciej stosowane w praktyce. Rzeczywiste układy mechaniczne s� z reguły nieliniowe, gdzie o nieliniowo�ci decyduj� własno�ci reologiczne materiału, wyst�powanie luzów, nieliniowy charakter sił dyssypacyjnych i charakterystyk spr��ystych elementów.
Ograniczone mo�liwo�ci analizy nieliniowych równa� ró�niczkowych skłaniaj� do stosowania modeli liniowych lub wykorzystania procedur linearyzacji. Rozpatrywanie układów jako liniowych ma sens z uwagi na to, �e istnieje du�a klasa obiektów mechanicznych, które z dopuszczaln� dla praktyki dokładno�ci� mog� by� reprezentowane przez modele liniowe. Istnieje wiele sposobów tworzenia modeli obiektów, w wyniku czego powstaj� ró�ne modele, w�ród których wymieni� nale�y: modele strukturalne, modele funkcjonalne oraz modele badawcze (modele ideowe, modele analityczne). Najogólniej podobie�stwo mi�dzy modelem a oryginałem mo�e polega� na podobie�stwie strukturalnym, ukazuj�cym wspólne cechy budowy wewn�trznej modelu i obiektu, lub na podobie�stwie funkcjonalnym, w którym istotna jest zbie�no�� ich wła�ciwo�ci. Zasadno�� działa� zwi�zanych z budow� i wykorzystaniem modeli zale�y od ich jako�ci, czym zajmuje si� dyscyplina nauki nazywana identyfikacj�, która mo�e dotyczy� zarówno budowy modeli obiektu jak i odtworzenia stanu badanego obiektu. LITERATURA 1. Awrejcewicz J.: Drgania deterministyczne układów dyskretnych. WNT, Warszawa 1996. 2. Bendat J.S., Piersol A.G.: Metody analizy i pomiaru sygnałów losowych. PWN, Warszawa, 1996. 3. Bishop R.D., Gladwell G.M., Michaelson S.: Macierzowa analiza drga�. PWN, Warszawa, 1972. 4. Bishop R.E.D., Johnson D.C.: The mechanics of vibration. Cambridge University Press, 1960. 5. Cempel C.: Drgania mechaniczne - wprowadzenie. Politechnika Pozna�ska, 1982.
6. Cempel C.: Wibroakustyka stosowana. Warszawa, PWN, 1989. 7. Cempel C.: Podstawy wibroakustycznej diagnostyki maszyn. WNT, Warszawa, 1982. 8. Cempel C.: Modele diagnostyki wibroakustycznej. DMRiP, Borówno,1994 (s.25-44). 9. Cempel C.: Niezawodno�� symptomowa i jej zastosowanie w drganiowej diagnostyce
maszyn. Zeszyty Naukowe, Politechnika Pozna�ska, Nr 34, 1990 (s.157-169). 10. Cempel C.: Vibroacoustical Condition Monitoring. Ellis Hor. Ltd., Chichester, New York, 1991. 11. Cempel C.: Teoria In�ynierii Systemów, skrypt, Zakład Dynamiki i Wibroakustyki Systemów,
Politechnika Pozna�ska, 2000. 12. Cholewa W., Kici�ski J.: Diagnostyka techniczna. Odwrotne modele diagnostyczne.
Wydawnictwo Politechniki �l�skiej, Gliwice 1997. 13. Chmielewski T., Zembaty Z.: Podstawy dynamiki budowli. Arkady, Warszawa 1998. 14. Dietrych J.: System i konstrukcja. WNT, Warszawa, 1985. 15. Dietrych M. ii : Podstawy konstrukcji maszyn. WNT, Warszawa 1995, tom 1. 16. Dobry M. W.: Optymalizacja przepływu energii w systemie człowiek - narz�dzie - podło�e.
Politechnika Pozna�ska, Rozprawy nr 330, Pozna�, 1998. 17. Eykhoff P. : Identyfikacja w układach dynamicznych. BNIn�. Warszawa.1980. 18. Fritzen C. P., Kiefer T.: Lokalization and Correction of Errors in Analytical Models. Proceedings
of the l Oth International Modal Analisis Conference, San Diego, CA, 1999, pp.1064-1071. 19. Giergiel J., Uhl T.: Identyfikacja układów mechanicznych. PWN, Warszawa, 1990. 20. Giergiel J. : Drgania mechaniczne. AGH, Kraków 2000. 21. Grifin M.J.: Handbook of human vibration. Academic Press, 1990. 22. Gutowski R., Swietlicki W.: Dynamika i drgania układów mechanicznych.
PWN,Warszawa, 1986. 23. Harris C. M.: Shock and Vibration Handbook. Third Edition, McGraw-Hill Book
Company, 1988. 24. Kaczmarek J.: Podstawy teorii drga� i dynamiki maszyn. Wy�sza Szkoła Morska,
Szczecin 1993. 25. Konderla P., Kasprzak T.: Komputerowe metody w teorii spr��ysto�ci. Dolno�l�skie
Wydawnictwo Edukacyjne, Wrocław 1997. 26. Kurowski W.: Modelowanie obiektów technicznych. R�kopis opracowania, Płock 2001. 27. Ka�mierczak H., Kromulski J.: Identyfikacja i minimalizacja obci��e� dynamicznych w
maszynach rolniczych metodami eksperymentalnej analizy modalnej. Projekt Badawczy nr 708819101 Raport Ko�cowy, PIMR 1993.
28. Ka�mierczak H., Kromulski J.: Identyfikacja własno�ci dynamicznych i obci��e� eksploatacyjnych maszyn w zastosowaniu do diagnostyki (na przykładzie prasy Z224). Prace PIMR, XXXVIII, Pozna� 1993, Nr 2, str. 70-87.
29. Ka�mierczak H., Kromulski J.: Metody identyfikacji parametrycznej w zastosowaniu do diagnostyki konstrukcyjnej. Problemy Eksploatacji 6/93 MCNEMT Radom 1993.
30. Ka�mierczak H.: Analiza dynamiczno�ci konstrukcji metod� eksperymentalnej analizy modalnej. I Szkoła Analizy Modalnej, AGH Kraków, 11-12 grudnia 1995.
31. Ka�mierczak H.: Zadawanie wymuszenia w eksperymentalnej analizie modalnej w aspekcie minimalizacji bł�dów modelowania. Szkoła Analizy Modalnej, Szczyrk, 1999.
32. Kici�ski J., Materny P.: Symulacyjne katalogi relacji diagnostycznych dla bazy wiedzy systemu. KDT. Warszawa, 2000.
33. Kruszewski J., Wittbrodt E.: Drgania układów mechanicznych w uj�ciu komputerowym. Tom I. Zagadnienia Liniowe, WNT, Warszawa, 1992.
34. Kucharski T.: Metoda obliczania odpowiedzi dynamicznych układów opisanych równaniami o zmiennych w czasie parametrach. I Krajowa Konferencja U�ytkowników MATLAB-a, AGH-Kraków, 1995.
35. Morel J.: Drgania maszyn i diagnostyka ich stanu technicznego. Polskie Towarzystwo Diagnostyki Technicznej, Warszawa, 1994.

36. Morrison F.: Sztuka modelowania układów dynamicznych. WNT, Warszawa, 1996. 37. Muller L., Wilk A.: Teoria podobie�stwa w badaniach modeli fizycznych i
matematycznych. Wydawnictwo Politechniki �l�skiej, Gliwice 1997. 38. Rakowski G., Kacprzyk Z.: Metoda elementów sko�czonych w mechanice konstrukcji.
Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa 1993. 39. Tylicki H.: Optymalizacja procesu prognozowania stanu technicznego pojazdów
mechanicznych. Rozprawa habilitacyjna nr 86, ATR Bydgoszcz, 1999. 40. Uhl T.: Historia i rozwój analizy modalnej. Materiały z obchodów 70-lecia urodzin i 45-
lecia pracy naukowej prof. dr hab. in�. Józefa Giergiela oraz V Szkoly Analizy Modalnej, s. 294-305., Kraków 200.
41. Uhl T., Batko W.: Wybrane problemy diagnostyki maszyn. CCATIE, Kraków, 1996. 42. Uhl T.: Komputerowo wspomagana identyfikacja modeli konstrukcji mechanicznych.
WNT, Warszawa 1997. 43. Zeigler B.: Teoria modelowania i symulacji. PWN.1984. 44. Zienkiewicz O.C.: Metoda elementów sko�czonych. Arkady, Warszawa 1972. 45. ółtowski B.: Identyfikacja diagnostyczna obiektów technicznych. Zagadnienia
Eksploatacji Maszyn. Z.1 (105). PAN. 1996. 46. ółtowski B.: Podstawy diagnostyki maszyn. Wyd. ATR, Bydgoszcz, 1996. 47. ółtowski B., wik Z.: Leksykon diagnostyki technicznej. Wyd.ATR,1996. 48. ółtowski B.: Uwarunkowania klasyfikacji stanów w diagnostyce maszyn. Diagnostyka,
niezawodno�� i bezpiecze�stwo. Radom–Krynica. KBM PAN 4’97 (27), (s.37 – 51). 49. ółtowski B.: Vibrodiagnosis experiments of machines. COMADEM. Sheffield'96,UK. 50. ółtowski B.: Diagnostic identification of real objects (part I). COMADEM 97. Helsinki.
Finland. 1997.(Vol.2, s.224-235). 51. ółtowski B.: Diagnosis experiments of machines. LAMDAMAP’97, Huddersfield, UK,
1997. (s.43-55). 52. ółtowski B.: Diagnostic identification of machines (part II). ISROMAC-7. Dynamics II.
vol. B Honolulu. HAWAII. USA. 1998 (s.832-840). 53. ółtowski B.: Application of modal analysis to diagnosis of machines. ISPE. Trynidad.
and Tobago. 2000. 54. ółtowski B.: Badania dynamiki maszyn. ATR, Bydgoszcz 2002.