GR NŻ R S - we.po.opole.pl · m-funkcji i wybrane obrazy modeli w programie MATLAB®/Simulink. 2...
41
POLITECHNIKA OPOLSKA WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI MGR INŻ. RAFAŁ STANISŁAWSKI IDENTYFIKACJA SYSTEMÓW DYNAMICZNYCH O ZŁOŻONEJ STRUKTURZE NA PRZYKŁADZIE OBIEKTU ENERGETYCZNEGO PRACA DOKTORSKA A U T O R E F E R A T PROMOTOR: DR HAB. INŻ. KRZYSZTOF LATAWIEC PROF. POLITECHNIKI OPOLSKIEJ OPOLE 2005
Transcript of GR NŻ R S - we.po.opole.pl · m-funkcji i wybrane obrazy modeli w programie MATLAB®/Simulink. 2...

POLITECHNIKA OPOLSKA WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI
MGR INŻ. RAFAŁ STANISŁAWSKI
IDENTYFIKACJA SYSTEMÓW DYNAMICZNYCH O ZŁOŻONEJ STRUKTURZE NA PRZYKŁADZIE
OBIEKTU ENERGETYCZNEGO
PRACA DOKTORSKA A U T O R E F E R A T
PROMOTOR: DR HAB. INŻ. KRZYSZTOF LATAWIEC PROF. POLITECHNIKI OPOLSKIEJ
OPOLE 2005

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
ii

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
iii
TECHNICAL UNIVERSITY OF OPOLE DEPARTMENT OF ELECTRICAL ENGINEERING AND AUTOMATIC CONTROL
Ph.D. Thesis
on
“Identification of complex-structure systems with an electric power unit application”
by
RAFAŁ STANISŁAWSKI M.Sc.
Advisor:
KRZYSZTOF LATAWIEC Ph.D., D.Sc.
OPOLE 2005 Abstract
This dissertation presents new results in parametric and nonparametric identification of linear dynamic complex-structure (or interconnected) systems. Nonparametric off-line active-experiment identification is run in the frequency domain, whereas parametric on-line passive-experiment identification, constituting the main body of the dissertation, is approached in the discrete time domain.
In the frequency-domain methodology, the existing parameter estimation schemes for complex-structure static systems are extended to dynamic ones and new, single-stage and two-stage algorithms are developed for effective estimation of frequency characteristics of all subsystems of the complex-structure system.
In the time-domain approach, new multivariable ARX and OBF (orthonormal basis functions) models are introduced. In particular, the inverse OBF modeling concept is extended to multivariable systems corrupted with both measurable and unmeasurable disturbances. In particular, new multivariable inverse Laguerre models are effectively constructed to cover open-loop unstable underdamped stochastic systems. Unknown parameters of these models are estimated using accordingly modified recursive/adaptive RLS, ALS and LMS estimation algorithms. A comparative estimation accuracy analysis is based on simulations run in the MATLAB® environment.
In the dissertation, certain topological solutions for complex-structure systems are also effectively extended.
New results of this research work are applied in the problem of identification of a BP-1150 boiler proper at the “Opole” Electric Power Plant. The boiler proper is a complex-structure, complex-dynamic, open-loop unstable system whose identification can only be accomplished under normal operating conditions, that is under closed-loop control. Taking account of (strong nonstationary) measurable disturbances plays a crucial role for the identification performance. Results of identification for a complex-structure system approach are positively verified with those obtained for identification of a classical multivariable system. Very low prediction errors obtained prove the usefulness of the presented identification methodology.

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
iv
iv

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
Spis Treści Abstract .............................................................................................................................. iii 1 Wstęp ............................................................................................................................ 1 2 Blok energetyczny wraz z kotłem BP-1150 ............................................................... 3
2.1 Przepływowe kotły energetyczne ............................................................................ 3 2.2 Model parownika kotła BP-1150............................................................................. 6
3 Modele systemu złożonego .......................................................................................... 8
3.1 Model sterowanych podsystemów .......................................................................... 8 3.2 Model jednowarstwowy ......................................................................................... 10
4 Identyfikacja systemów o złożonej strukturze w dziedzinie częstotliwości............ 11
4.1 Identyfikacja fizykalnego modelu parownika w dziedzinie częstotliwości ............ 13 5 Przegląd wybranych modeli i algorytmów identyfikacji w dziedzinie czasu ......... 15
5.1 Wielowymiarowe modele proste (MIMO).............................................................. 16 5.2 Estymacja parametrów modeli obiektów wielowymiarowych................................ 20 5.3 Filtracja sygnałów ................................................................................................... 21 5.4 Estymacja parametrów systemów złożonych.......................................................... 23
6 Identyfikacja modelu parownika kotła BP-1150 w dziedzinie czasu ..................... 23
6.1 Weryfikacja otrzymanych modeli ........................................................................... 24 6.2 Badanie modeli wielowymiarowych i filtrów adaptacyjnych ................................. 26 6.3 Badanie własności estymatorów.............................................................................. 28 6.4 Identyfikacja parownika jako systemu o złożonej strukturze.................................. 29
7 Kierunki dalszych badań ............................................................................................ 30 8 Wnioski ......................................................................................................................... 31 Wybrane pozycje literaturowe ......................................................................................... 32 Dorobek publikacyjny autora .......................................................................................... 34
v


Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
1. Wstęp
Do rozwiązania wielu problemów sterowania systemami niezbędne są modele matematyczne tych systemów, adekwatne w zadanym przedziale amplitud i częstotliwości. Modele matematyczne systemów mogą być tworzone na dwa sposoby: 1) przez modelowanie zjawisk np. fizykochemicznych zachodzących w systemie, 2) na podstawie identyfikacji, w szczególności identyfikacji parametrycznej rozważanej głównie w niniejszej pracy. W pierwszym przypadku model otrzymywany jest w oparciu o opis matematyczny procesów np. fizykochemicznych zachodzących w rzeczywistym obiekcie. Identyfikacja parametryczna natomiast polega na wyznaczaniu parametrów matematycznego modelu „eksperymentalnego” (nie fizykochemicznego) w oparciu o znajomość sygnałów uzyskanych z obiektu (danych eksperymentalnych). Również w przypadku 1 elementy identyfikacji są niezbędne ze względu na konieczność weryfikacji modeli matematycznych otrzymanych w wyniku modelowania np. fizykochemicznego. W dalszym ciągu będziemy odnosić nasze rozważania do złożonych procesów technologicznych, gdzie rozpatrywane są głównie modele fizykochemiczne. Jednak przedstawiona w pracy metodologia identyfikacji może znaleźć zastosowanie w przypadku złożonych systemów ekonomicznych, biologicznych, socjologicznych, politycznych i innych. Modele fizykochemiczne są zazwyczaj bardzo złożone i zwykle nie mogą być wykorzystane do celów sterowania. Prostsze modele „eksperymentalne” (lub „arbitralne”) będą przedmiotem rozważań niniejszej pracy, gdyż mogą one być z powodzeniem wykorzystane do celów sterowania. Prostota modeli eksperymentalnych ma istotne znaczenie w przypadku systemów złożonych (lub „wielkich”), gdzie obciążenie obliczeniowe zarówno na etapie identyfikacji, jak i sterowania, jest zwykle bardzo duże.
Należy podkreślić, że nie ma ścisłej definicji systemu złożonego i określenie to może mieć różne znaczenie dla różnych zastosowań. Jako system złożony może być traktowany taki układ, do którego opisu niezbędna jest duża liczba i złożoność równań. Wówczas granica rozdzielająca systemy złożone od prostych jest nieformalna i bardzo płynna. Częściej jednak stosuje się bardziej formalną definicję, gdzie systemem złożonym nazywa się układ składający się z pewnej liczby rozróżnialnych elementów (podsystemów), które wzajemnie na siebie wpływają w określony i znany sposób. Wpływ ten jest nazywany topologią połączeń podsystemów w systemie. W pracy efektywnie rozszerzono pewne rozwiązania topologiczne dla systemów statycznych na systemy dynamiczne.
W niniejszej pracy przedstawiono nowe rezultaty parametrycznej i nieparametrycznej identyfikacji (off-line i on-line) liniowych dynamicznych systemów złożonych w eksperymencie biernym. Specyfika rozważanego, energetycznego obiektu niestabilnego (bez samowyrównania) sprawia, że identyfikacja musiała być przeprowadzona w trakcie normalnej pracy zamkniętego układu regulacji obiektem. Uzasadnia to konieczność identyfikacji w eksperymencie biernym, a także upoważnia do przyjęcia liniowych modeli dla całego systemu i jego podsystemów. Ilustrację praktyczną przedstawionych rezultatów stanowi identyfikacja parownika kotła BP-1150 pracującego w Elektrowni Opole S.A. Jest to system złożony, posiadający bardzo zróżnicowane własności dynamiczne. Parownik znajduje się stale w dwóch układach regulacji. Pierwszy reguluje ilość podawanej wody (układ regulacji poziomu wody), a drugi steruje ilością czynnika roboczego podawanego do kotła (układ regulacji ciśnienia). Poznanie własności takiego systemu poprzez opracowanie modeli dokładnie predykujących w sposób ciągły wartości wyjść z systemu jest pierwszym krokiem w kierunku opracowania nowoczesnego algorytmu sterowania systemem. Nieco inny cel ma próba wniknięcia w strukturę wewnętrzną systemu poprzez wyznaczenie własności poszczególnych elementów wchodzących w skład parownika. Zadanie to ma charakter poznawczy i pozwoli lepiej zrozumieć ten złożony proces technologiczny.
1
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
Cel, teza i zakres pracy Celem niniejszej pracy jest opracowanie metod identyfikacji dla liniowych systemów
dynamicznych o złożonej strukturze, zarówno w dziedzinie częstotliwości (model nieparametryczny), jak i czasu (modele parametryczne), a także implementacji opracowanych algorytmów i przeprowadzenie analizy ich efektywności w zadaniu identyfikacji parownika kotła BP-1150.
Wobec powyższego teza pracy została sformułowana następująco:
Możliwa jest efektywna identyfikacja – dla celów sterowania – własności dynamicznych systemów o złożonej, znanej strukturze w oparciu o nieparametryczne i parametryczne modele matematyczne podsystemów. Przykładowe realizacje algorytmów identyfikacji dla parownika kotła BP-1150 umożliwiają budowę modeli podsystemów,
rzydatnych dla celów sterowania. p
Celem naukowym pracy jest:
• opracowanie metod identyfikacji systemów o złożonej strukturze w dziedzinie częstotliwości,
• opracowanie efektywnych modeli i algorytmów adaptacyjnej identyfikacji systemów złożonych w dziedzinie czasu,
• pokazanie możliwości zastosowania opracowanych modeli do identyfikacji własności dynamicznych parownika kotła BP-1150 (w Elektrowni Opole S.A.) dla celów sterowania,
• opracowanie implementacji programowych w/w algorytmów i modeli.
Przeprowadzona w pracy analiza teoretyczna rozszerzy zakres stosowalności istniejących modeli systemów złożonych (model sterowanych podsystemów – nazywany w pracy modelem Hasiewicza) oraz wykorzysta nowoczesne techniki modelowania za pomocą tzw. Funkcji Bazy Ortonormalnej (ang.: Orthonormal Basis Functions - OBF), a także koncepcji modelowania odwrotnego OBF, wprowadzonej przez grupę prof. Latawca. Analiza numeryczna i badania symulacyjne będą oparte na narzędziach programowych środowiska MATLAB®.
Struktura niniejszej pracy jest następująca. Po wstępnym omówieniu w rozdziale 1 zagadnień identyfikacji i systemów złożonych, w rozdziale 2 przedstawiono praktyczny obiekt zainteresowania pracy – parownik kotła energetycznego BP-1150 pracujący w Elektrowni Opole S.A. W rozdziale 3 przedstawiono dwa typy modeli systemów złożonych oraz określono topologiczne warunki identyfikowalności takich systemów. Metodologię identyfikacji oraz algorytmy estymacji właściwości elementów w dziedzinie częstotliwości dla systemów przedstawionych w rozdziale 3 podano w rozdziale 4. W tym rozdziale pokazano również wyniki częstotliwościowej identyfikacji fizykalnego modelu parownika kotła BP-1150. W rozdziale 5 przedstawiono metody identyfikacji systemów złożonych w dziedzinie czasu dyskretnego, podano algorytmy oparte zarówno na modelach nie wnikających w strukturę wewnętrzną systemu, jak też na modelach poszczególnych podsystemów wchodzących w skład systemu złożonego. Rozdział 6 ilustruje zastosowania modeli i algorytmów estymacji z rozdziału 5 do identyfikacji parownika kotła BP-1150. Uzyskana wysoka dokładność identyfikacji, w sensie bardzo małych błędów predykcji pomiędzy wyjściami modelu a wyjściami obiektu, wskazuje, że zadanie identyfikacji parownika zostało efektywnie rozwiązane. W rozdziale 7 omówiono kierunki dalszych badań, a w rozdziale 8 podsumowano osiągnięcia niniejszej pracy. W końcowej części pracy zawarto wykaz literatury, a także dołączono m.in. dowody wybranych twierdzeń, opisy niektórych m-funkcji i wybrane obrazy modeli w programie MATLAB®/Simulink.
2
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
2. Blok energetyczny wraz z kotłem BP-1150
W tym rozdziale poddano analizie praktyczny obiekt zainteresowania pracy, którym jest blok energetyczny funkcjonujący w Krajowym Systemie Energetycznym (KSE), będącym częścią systemu europejskiego. Szczególną uwagę zwrócono na bloki energetyczne o mocy 360 MW, zainstalowane w elektrowniach w Bełchatowie i w Opolu (łącznie 18 bloków energetycznych o łącznej mocy 6480 MW, stanowiących ok. 25% mocy zainstalowanej w KSE). W skład bloków energetycznych o mocy 360 MW wchodzą kotły przepływowe o wydajności 1150 ton/h pary.
Zainteresowanie pracy blokiem energetycznym o mocy 360 MW wynika z następujących powodów:
• wieloletnia współpraca Politechniki Opolskiej z Elektrownią Opole S.A.,
• dostępne, opracowane w Katedrze Automatyki, Elektroniki i Informatyki modele matematyczne (fizykalne) kotła przepływowego BP-1150,
• dostępność danych pomiarowych uzyskanych podczas eksploatacji bloku energetycznego,
• kocioł bloku energetycznego jest dobrym przykładem systemu o złożonej strukturze, zarówno ze względu na wielką złożoność modeli matematycznych, jak również ze względu na rozbudowaną strukturę powiązań podsystemów,
• parownik kotła znajduje się stale pod działaniem dwóch, bardzo istotnych z punktu widzenia działania bloku energetycznego, układów regulacji, co uzasadnia konieczność identyfikacji dla celów sterowania.
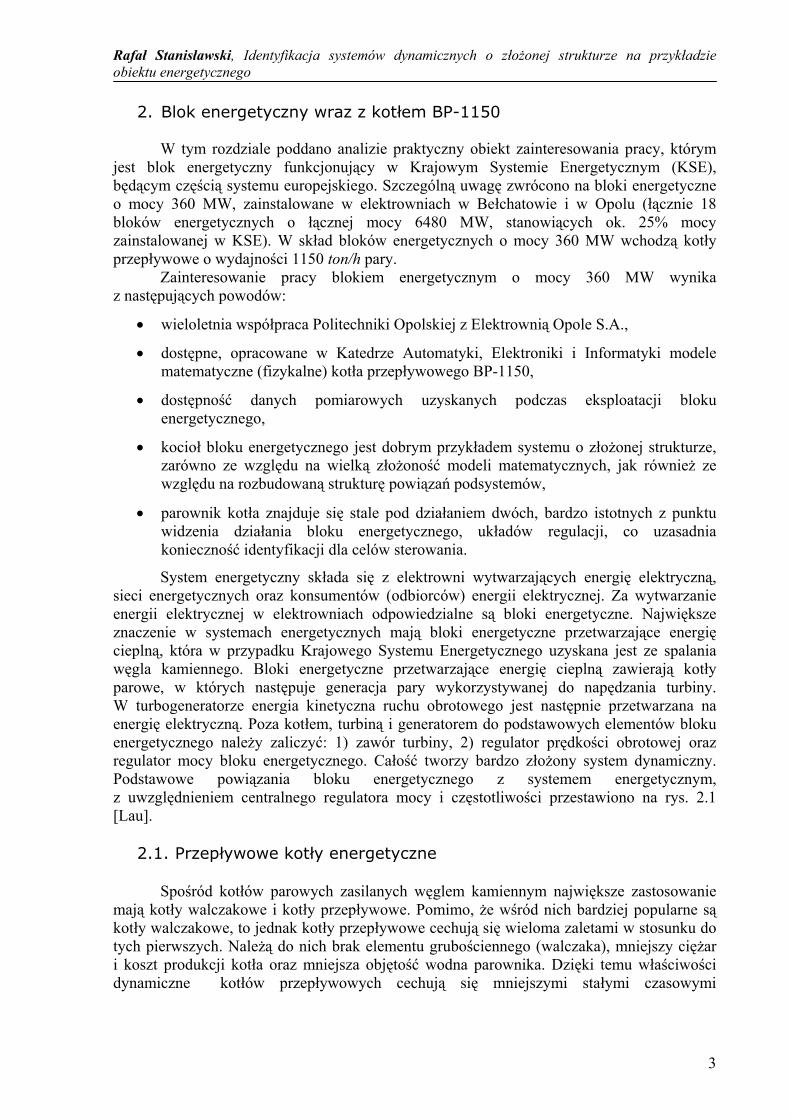
System energetyczny składa się z elektrowni wytwarzających energię elektryczną, sieci energetycznych oraz konsumentów (odbiorców) energii elektrycznej. Za wytwarzanie energii elektrycznej w elektrowniach odpowiedzialne są bloki energetyczne. Największe znaczenie w systemach energetycznych mają bloki energetyczne przetwarzające energię cieplną, która w przypadku Krajowego Systemu Energetycznego uzyskana jest ze spalania węgla kamiennego. Bloki energetyczne przetwarzające energię cieplną zawierają kotły parowe, w których następuje generacja pary wykorzystywanej do napędzania turbiny. W turbogeneratorze energia kinetyczna ruchu obrotowego jest następnie przetwarzana na energię elektryczną. Poza kotłem, turbiną i generatorem do podstawowych elementów bloku energetycznego należy zaliczyć: 1) zawór turbiny, 2) regulator prędkości obrotowej oraz regulator mocy bloku energetycznego. Całość tworzy bardzo złożony system dynamiczny. Podstawowe powiązania bloku energetycznego z systemem energetycznym, z uwzględnieniem centralnego regulatora mocy i częstotliwości przestawiono na rys. 2.1 [Lau].
2.1. Przepływowe kotły energetyczne
Spośród kotłów parowych zasilanych węglem kamiennym największe zastosowanie
mają kotły walczakowe i kotły przepływowe. Pomimo, że wśród nich bardziej popularne są kotły walczakowe, to jednak kotły przepływowe cechują się wieloma zaletami w stosunku do tych pierwszych. Należą do nich brak elementu grubościennego (walczaka), mniejszy ciężar i koszt produkcji kotła oraz mniejsza objętość wodna parownika. Dzięki temu właściwości dynamiczne kotłów przepływowych cechują się mniejszymi stałymi czasowymi
3
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
SYSTEM ENERGETYCZNY
∆N/N0
1/c
∆f/f0
TURBINA - GENERATOR
1
∆M/M0
∆N/N0
1
REGULATORMOCY BLOKUENERGETYCZ
NEGO
Zmiana mocy przekazywanej do systemu∆N/N0
+
-
M = M(L, P)
++
+ -
∆P/P0 = ∆Μ/Μ0 − ∆A/A0
Przepływ paryprzez zawory
turbiny
∆A/A0
∆M/M0
∆P/P0
Zmiana zapotrzebowania naenergię w systemie
energetycznym ∆Ns/N0
∆L/L0
KOCIOŁ
∆P/P0
Zmiana częstotliwości wsystemie energetycznym
CENTRALNYREGULATOR
MOCY WSYSTEMIE
ENERGETYCZNYM
Moc zadanabloku
energetycznego
"ZDOLNOŚĆAKUMULACYJNA"∆P/P0
∆M/M0
Zmiana przepływupary po
zaburzeniuciśnieniem
"BEZWŁADNOŚĆ CIEPLNA"
∆L/L0
∆M/M0 P=const
Przepływ paryświeżej po zmianiezadanej mocy bloku
dla P=const.
++
Zmiana stopnia otwarciazaworów regulacyjnych
Z m ia n a c iśn ie n ia n a w ylo c ie z k o t ła
Z m ia n a ilo śc i p a liw a d o sta rcza neg o do ko t ła
Z m ia n a p rz ep ływ u m aso w eg o p a r y n a w ylo c ie z k o t ła
Rys.2.1. Uproszczony schemat powiązań bloku energetycznego ze środowiskiem
i opóźnieniami. Kotły przepływowe potrafią szybciej reagować na zmiany zapotrzebowania na energię elektryczną, a przez to wydają się być bardziej konkurencyjne na ryku energii elektrycznej.
Kocioł BP-1150, którego parownik jest obiektem zainteresowania tej pracy, jest
kotłem przepływowym, opracowanym przez firmę SULZER (Szwajcaria). Jest przystosowany do współpracy z turbiną parową o mocy 360 MW. Jego wydajność to 1150 [ton/h] pary przy ciśnieniu znamionowym 20.3 [MPa]. W parowniku przepływowym kotła BP-1150 funkcjonują dwa główne układy regulacji:
• układ regulacji zasilania, ustalający przepływ masowy wody zasilającej kocioł na podstawie pomiaru poziomu wody w separatorze (regulacja poziomu wody w separatorze),
• układ regulacji ciśnienia w kotle, ustalający wielkość strumienia cieplnego dopływającego do kotła na podstawie pomiaru ciśnienia wylotowego.
Obydwa układy regulacji funkcjonują nieprzerwanie podczas pracy kotła, a ich wyłączenie jest niemożliwe ze względu na astatyzm (brak samowyrównania) obiektu.
Uproszczony schemat układu regulacji ciśnienia kotła BP-1150 przedstawiono na rys. 2.2 [DTR].
4

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
G
RT
RN
NZ
P
PZ
RP
/
MP
RKRB
Rn1
~
Σ
+
-
+ -
+ -
+ -
+ -
+ -
Nn
f(Nz)
Rys.2.2. Uproszczona struktura układów regulacji ciśnienia i mocy w blokach
energetycznych 360 MW
Wartość zadana układu regulacji mocy czynnej NZ jest określona przez regulator centralny ARCM (Automatyczna Regulacja Częstotliwości i Mocy) Państwowej Dyspozycji Mocy i przekazywana do bloku energetycznego dwoma sygnałami regulacyjnymi: wolnej Y0 i szybkiej Y1 zmiany mocy regulacyjnej. Regulator mocy RN zmienia z kolei wartość zadaną prędkości obrotowej regulatora turbiny RT, co powoduje zmiany stopnia otwarcia zaworu regulacyjnego turbiny i zmiany przepływu masowego pary Mp przepływającej do turbiny. Oddziaływania układu regulacji mocy turbozespołu stanowią główne zakłócenie dla układu regulacji ciśnienia pary w kotle. Regulator ciśnienia RP, na podstawie różnicy między ciśnieniem zadanym a rzeczywistym ciśnieniem wylotowym kotła, określa wartość zadaną regulatora paliwa, która jest modyfikowana przez układ RK wyznaczania wartości opałowej (kaloryczności) węgla. Regulator paliwa RB wypracowuje wartości zadane dla regulatorów Rn1 do Rn6 prędkości obrotowych podajników węgla, funkcjonujących na poszczególnych młynach węglowych. Młyny węglowe zasilają kocioł sumaryczną ilością węgla Σ. Wartość zadana układu regulacji ciśnienia PZ może być zmieniana, jednak przy obciążeniu energobloku powyżej 86% praca bloku odbywa się w zasadzie przy stałym ciśnieniu.
Uproszczony schemat układu regulacji poziomu wody w separatorze (układu regulacji
zasilania) przedstawiono na rys. 2.3 [DTR].
5
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
Hsep z
RH
Psep MP sep
ddt
Rnp
M
Rne
Rprz
+-
+
-
+-+-
+-
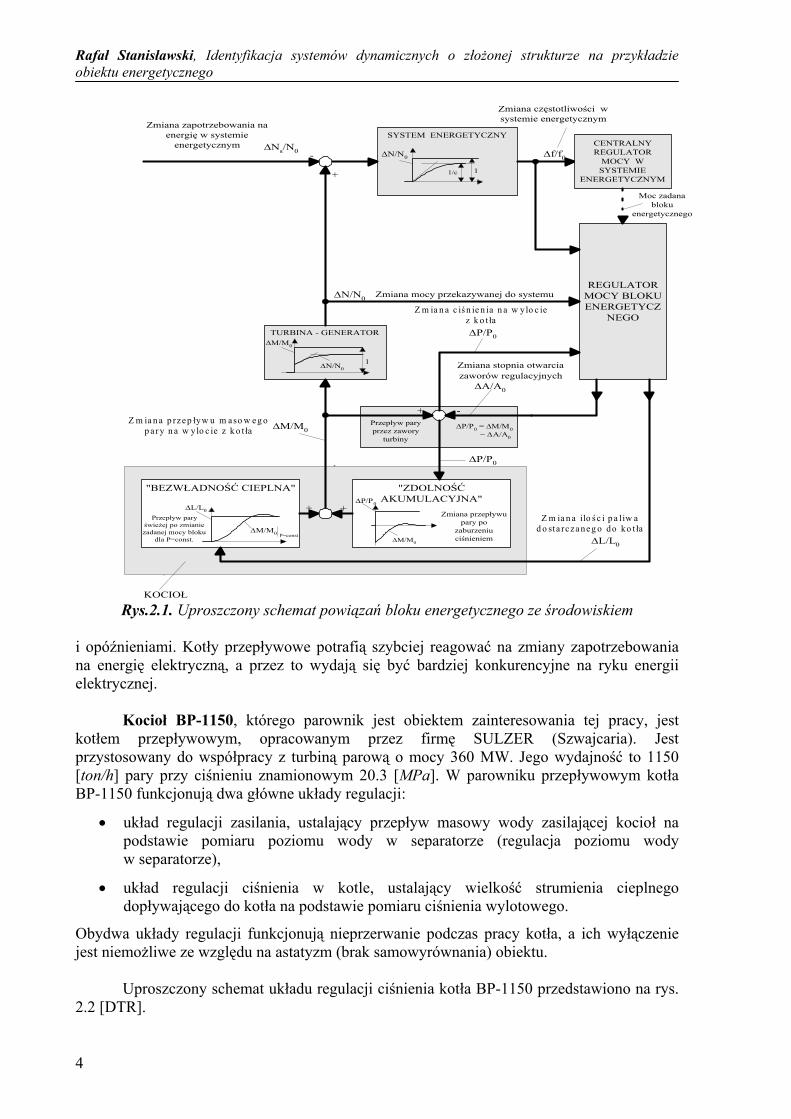
Rys.2.3. Uproszczona struktura układu regulacji zasilania kotła BP-1150
Poziom wody w separatorze jest wyznaczany na podstawie różnicy ciśnień
hydrostatycznych w górnej i dolnej części separatora. Sygnał wyjściowy z regulatora poziomu wody w separatorze RH jest powiększany o przepływ pary na wylocie separatora, oraz zmniejszany o pochodną ciśnienia w separatorze. Uwzględnienie sygnału korekcyjnego w postaci pochodnej ciśnienia wynika z faktu przejściowego spadku poziomu wody w separatorze w wyniku narastania ciśnienia. Tak wypracowany sygnał stanowi wartość zadaną dla układu regulacji przepływu wody zasilającej do kotła. Rzeczywisty przepływ wody dopływającej do parownika wyznaczany jest jako różnica przepływu zasilającego i przepływu wody do wtryskowych schładzaczy pary. Sygnał wyjściowy regulatora przepływu wody zasilającej Rprz stanowi wartość zadaną dla układów regulacji prędkości obrotowych pomp zasilających.
2.2. Model parownika kotła BP-1150
Uproszczony schemat blokowy modelu parownika został przedstawiony na rys.2.4.
6
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
SEPARATOREKRAN
MIESZALNIK,FILTR,
RUROCIĄGIŁĄCZĄCE
POMPA
MS1
MZAS
hZAS
q∼
MPsep
PSEP
HSEP
MCYR
MKOND
PSEP
PSEP
hw MSEP
hSEP
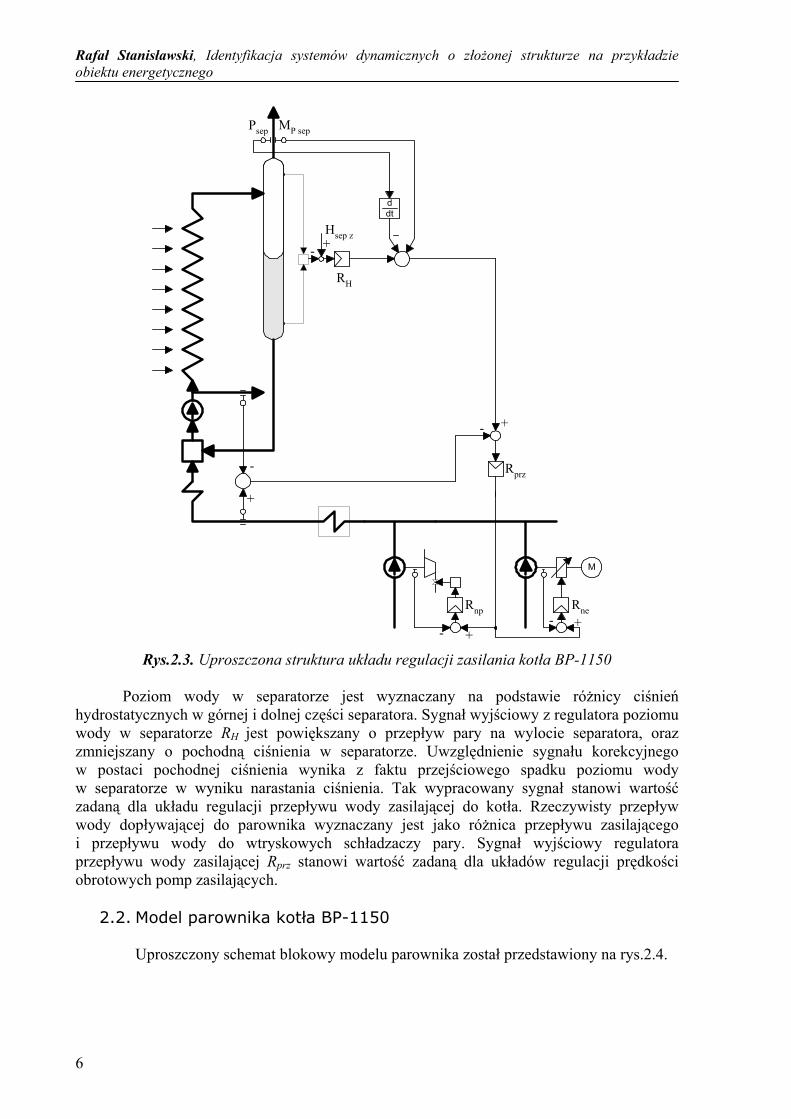
Rys.2.4. Schemat blokowy parownika kotła BP-1150
Model składa się z czterech podsystemów: 1) pompy cyrkulacyjnej, 2) podsystemu zawierającego filtr, mieszalnik oraz rurociągi doprowadzające, 3) ekranu komory paleniskowej i 4) separatora. Pokrótce zostaną omówione poszczególne elementy.
Pompa cyrkulacyjna. Wejściami systemu są: przepływ wody zasilającej Mzas oraz przepływ masowy wody pobieranej do schładzaczy pary Ms1. Natomiast wyjścia systemu to przepływ masowy kondensatu pobieranego z separatora Mkond i przepływ masowy przez pompę cyrkulacyjną Mcyr. Dynamika procesów zachodzących w pompie cyrkulacyjnej jest pomijalna w porównaniu do procesów zachodzących w pozostałych podsystemach parownika.
Mieszalnik, filtr i rurociągi łączące. Model ten zawiera trzy elementy, które zostały połączone w jeden ze względu na prostotę zjawisk tam zachodzących oraz sąsiednie położenie. Wejściami modelu są: przepływy masowe wody przez pompę cyrkulacyjną Mcyr, kondensatu pobieranego z separatora Mkond i wody zasilającej Mzas, wartość entalpii wody zasilającej kocioł hzas oraz ciśnienie pary w separatorze Psep. Wartością wyznaczaną przez ten model jest entalpia wody pobieranej do rur ekranowych komory paleniskowej hw.
Rury ekranowe komory paleniskowej. Sygnały wejściowe do modelu rur ekranowych to: wartość entalpii wody podawanej do rur hw, ciśnienie pary w separatorze Psep i względna wartość strumienia cieplnego podawanego do komory paleniskowej q~. Wartości wyznaczane przez ten model to przepływ (Msep) i entalpia pary mokrej (hsep) na wlocie do separatora. Model rur ekranowych posiada bardzo złożone własności dynamiczne i jest układem o parametrach rozłożonych wzdłuż jednej zmiennej przestrzennej (długości rur ekranowych parownika).
Separator. Sygnałami wejściowymi modelu separatora jest entalpia hsep oraz przepływy masowe wody Msep wpływającej do separatora, pary pobieranej na turbinę parową MPsep i kondensatu pobieranego z separatora Mkond. Sygnały wyjściowe to ciśnienie pary Psep i poziom wody Hsep w separatorze. Zachodzą tu zjawiska głównie związane z oddzielaniem wody od pary. Przedstawiony model parownika kotła znalazł zastosowanie w zadaniach identyfikacji w dalszej części pracy.
7

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
3. Modele systemu złożonego
W pracy zostały przedstawione dwa modele opisujące topologię połączeń. Pierwszym jest model sterowanych podsystemów, wprowadzony i opisany w pracach [Ha2, Ha3], drugi natomiast, wprowadzony przez autora, nazwany został modelem o strukturze jednowarstwowej. W literaturze stosuje się również inne modele do opisu takich systemów np. opis Fresewinkela [Fre, FrU], lub opis przedstawiony w pracy [MiM]. Opracowania przedstawione w tym rozdziale są wynikiem analizy literaturowej jak i prac własnych autora [St1, St2, St3, SL1, SL2].
3.1. Model sterowanych podsystemów
Model sterowanych podsystemów (Hasiewicza) [Ha2, Ha3] upraszcza złożoność systemu dla określonej grupy układów sterowania. Jest on dedykowany dla obiektów, w których występuje zdecentralizowane sterowanie poszczególnymi częściami układu (podsystemami). Podsystemy te posiadają wówczas własne lokalne układy regulacji, na które podawane są odrębne wartości zadane.
Ideę proponowanego opisu stanowi przedstawienie obiektu w postaci hierarchicznego modelu składającego się z dwóch warstw. Warstwę dolną (zerową) stanowią poszczególne elementy wraz z lokalnymi układami sterowania. Schemat blokowy przykładowego i-tego elementu, i=1,…,n, w warstwie dolnej został przedstawiony na rys.3.1.
Ri
EDiui yi
ci
ei Rys.3.1. Element systemu złożonego
Warstwa górna (pierwsza) modelowana jest jako zbiór wypadkowych modeli zawierających podsystemy razem z regulatorami, które połączone są ze sobą wg określonej topologii, opisanej za pomocą macierzy H (rys.3.2). Poszczególne składowe tej macierzy przyjmują wartości 0 lub 1, w zależności od tego czy występuje połączenie między poszczególnymi podsystemami, czy też nie.
Przy założeniu, że właściwości wszystkich podsystemów wchodzących w skład systemu złożonego są zestawione w macierzach blokowo-diagonalnych A(.) i B(.)
(3.1)
=
(.)0000
00(.)0000(.)
(.) 2
1
nA
AA
A
L
MO
=
(.)0000
00(.)0000(.)
(.) 2
1
nB
BB
B
L
MO
8

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
B1A1
B2A2
BnAn
H
C1 C2Cn
Y1
Y2
Yn
ξ1
ξ2
ξn
δ1
δ2
δn
Un
U2
U1
Rys.3.2. System Hasiewicza z elementami wielowymiarowymi
o wymiarach oraz wektory
C(.), Y(.) i U(.) są wektorami blokowymi ( dim , ,
) w postaci
×
=
×
= ∑∑∑∑
====
n
ii
n
ii
n
ii
n
ii ncnyBnunyA
1111(.))dim(,(.))dim(
( ) nynyYn
ii == ∑
=1(.) dim
=i ncnc
( ) ∑=
=n
iinuU
1(.)
( ) ∑=
=n
iC
1(.)dim
=
(.)
(.)(.)
1
nY
YY M
=
(.)
(.)(.)
1
nU
UU M
=
(.)
(.)(.)
1
nC
CC M
gdzie Yi(.), Ci(.), Ui(.) są wektorami kolumnowymi związanymi z sygnałami mierzonymi na i-tym podsystemie, system można opisać równaniem
(.)(.)(.)
(.)(.)(.)(.)(.)(.)δ
ξ+=
++=HYU
CBUAY (3.2)
Należy podkreślić, że podsystemy mogą być opisane modelem zdefiniowanym w dowolnej dziedzinie. Na przykład elementy A(.) i B(.) mogą zostać opisane transmitancją widmową A(jω) i B(jω), wówczas sygnały występujące w systemie są opisane w dziedzinie częstotliwości: Y(jω), U(jω), C(jω). Natomiast gdy A(.) i B(.) reprezentują opisy transmitancyjne elementów dyskretnych, wówczas mamy A(q-1) i B(q-1) (lub A(z) i B(z)), gdzie q-1 jest operatorem jednostkowego przesunięcia wstecz (a z jest operatorem zespolonym), natomiast sygnały mogą być opisane w dziedzinie czasu dyskretnego t, tj. Y(t), U(t), C(t).
Z modelem systemu złożonego bezpośrednio związane są pewne warunki stawiane topologii połączeń podsystemów. Nazywane są one warunkami topologicznej identyfikowalności. Spełnienie tych warunków jest konieczne i gwarantuje identyfikowalność jedynie w warunkach deterministycznych.
9

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
WARUNEK 3.1 System jest dobrze określony, tzn. dla każdej wartości funkcji C(.), δ(.), ξ(.) układu o strukturze H, istnieje dokładnie jedno rozwiązanie w postaci sygnałów U(.), Y(.) spełniające układ równań (3.2). WARUNEK 3.2 System jest identyfikowalny topologicznie, tzn. dla sygnałów C(.), Y(.) oraz znanej struktury połączeń H, istnieje jednoznaczne rozwiązanie w postaci Ai(.), Bi(.) dla i=1,2,...,n, przy zerowych zakłóceniach δ(.) i ξ(.). TWIERDZENIE 3.1 Załóżmy, że istnieją funkcje A(.) i B(.) dla skończonej wartości argumentu (.). System Hasiewicza jest dobrze określony, gdy jest spełniony warunek
0)(.)det( ≠− HAI (3.3)
TWIERDZENIE 3.2 Załóżmy, że system Hasiewicza jest dobrze określony (spełniony jest warunek opisany
w twierdzeniu 3.1). Podsystem Si (i=1,2,..,n) jest identyfikowalny topologicznie, gdy zachodzi warunek
( ))dim((.)))(i
ii UGHrank = (3.4)
gdzie G(i)(.) jest podmacierzą macierzy blokowej G(.) po usunięciu i-tej kolumny ( [ ]T
inii GGG (.)(.)(.) 1 L= ), przy czym G(i)(.) ma wymiary ny×(nc-nci).
Twierdzenia 3.1, 3.2, dla opisu systemów dynamicznych opisanych w dziedzinie częstotliwości zostały przedstawione w pracach autora [St2, SL1, SL2], natomiast dla systemów statycznych w pracy [Ha3].
3.2. Model jednowarstwowy
Proponowany w pracy opis stanowi modyfikację modelu sterowanych podsystemów. Modyfikacja polega na zmianie modeli podsystemów tak, że nie posiadają one dwóch rodzajów wejść (zewnętrznych oraz interakcyjnych) lecz wspólne wejście, na które podawana jest suma sygnałów zewnętrznych i interakcyjnych, albo – jeżeli tak jest w modelowanym elemencie, tylko sygnał interakcyjny lub zewnętrzny.
Topologie połączeń charakteryzują dwie macierze zerojedynkowe: H i H~ . Macierz H pokazuje, które sygnały interakcyjne podawane są na wejścia podsystemów. Informacje o tym, jakie wejścia zewnętrzne podawane są na podsystemy, zawiera macierz H~ . System złożony opisany modelem jednowarstwowym został przedstawiony na rys.3.3.
Równanie modelu jednowarstwowego przyjmuje postać
(.)(.)~(.)(.)
(.)(.)(.)(.)
δ
ξ
++=
+=
CHYHU
UAY (3.5)
gdzie A(.) jest macierzą blokowo-diagonalną zawierającą elementy Ai(.), w których znajdują się opisy poszczególnych podsystemów.
10
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
A1
A2
An
H
C1 C2 Cn
Y1
Y2
Yn
ξ1
ξ2
ξn
δ1
δ2
δn
Un
U2
U1
H~
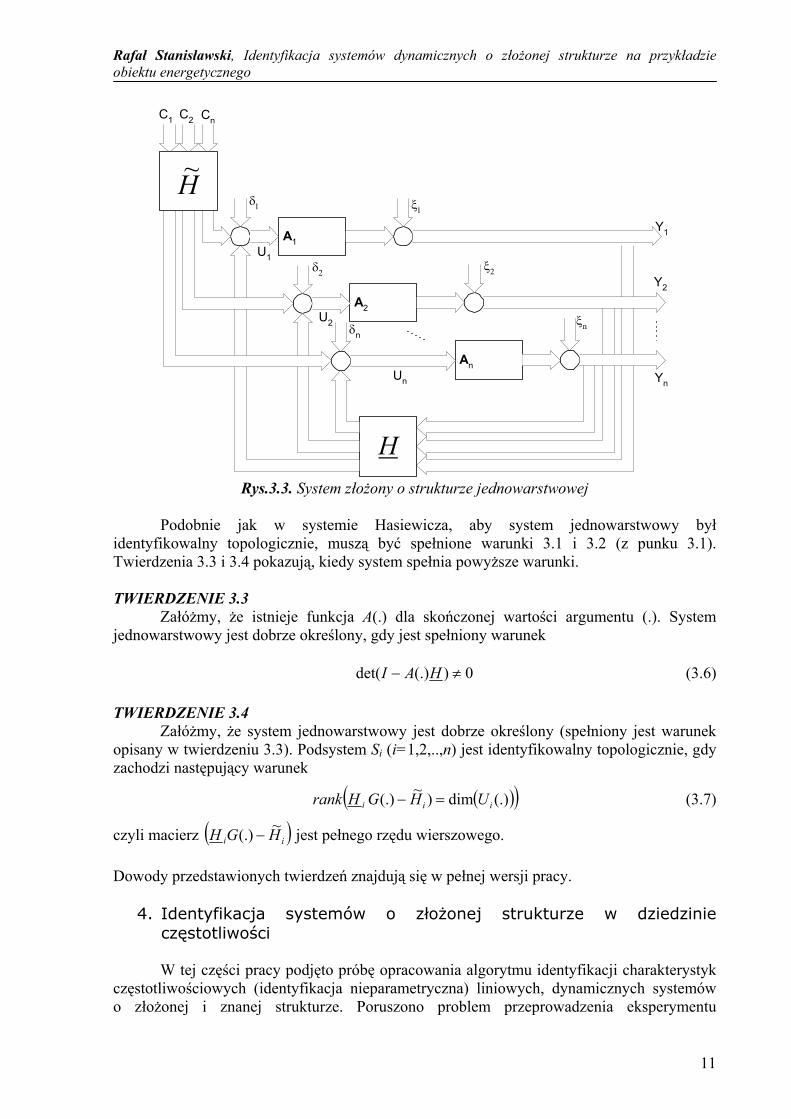
Rys.3.3. System złożony o strukturze jednowarstwowej
Podobnie jak w systemie Hasiewicza, aby system jednowarstwowy był
identyfikowalny topologicznie, muszą być spełnione warunki 3.1 i 3.2 (z punku 3.1). Twierdzenia 3.3 i 3.4 pokazują, kiedy system spełnia powyższe warunki. TWIERDZENIE 3.3 Załóżmy, że istnieje funkcja A(.) dla skończonej wartości argumentu (.). System jednowarstwowy jest dobrze określony, gdy jest spełniony warunek 0)(.)det( ≠− HAI (3.6) TWIERDZENIE 3.4
Załóżmy, że system jednowarstwowy jest dobrze określony (spełniony jest warunek opisany w twierdzeniu 3.3). Podsystem Si (i=1,2,..,n) jest identyfikowalny topologicznie, gdy zachodzi następujący warunek
( )( )(.)dim)~(.) iii UHGHrank =− (3.7)
czyli macierz ( )ii HGH ~(.) − jest pełnego rzędu wierszowego. Dowody przedstawionych twierdzeń znajdują się w pełnej wersji pracy.
4. Identyfikacja systemów o złożonej strukturze w dziedzinie częstotliwości
W tej części pracy podjęto próbę opracowania algorytmu identyfikacji charakterystyk
częstotliwościowych (identyfikacja nieparametryczna) liniowych, dynamicznych systemów o złożonej i znanej strukturze. Poruszono problem przeprowadzenia eksperymentu
11

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
identyfikacyjnego, estymacji charakterystyk częstotliwościowych podsystemów oraz weryfikacji otrzymanych wyników identyfikacji.
Pojęcie eksperyment identyfikacyjny będzie oznaczało szereg czynności: 1) zaplanowanie sygnałów testujących, 2) dokonanie pomiarów wszystkich wymaganych wielkości podczas wprowadzania do systemu zaplanowanych sygnałów wejściowych oraz 3) dokonanie wstępnej obróbki częstotliwościowej mierzonych wielkości w celu otrzymania punktów widm częstotliwościowych omawianych sygnałów. W pracy omówiono techniki przeprowadzenia eksperymentu z sinusoidalnym sygnałem testującym oraz z sygnałem wielo-harmonicznym.
W wyniku przeprowadzenia eksperymentu identyfikacyjnego otrzymuje się punkty widm częstotliwościowych sygnałów pomiarowych xi(t), i=1,…,n, w postaci wartości zespolonych , i=1,…,n, j=1,…,N)( j
ki jX ω ω, k=1,…,K. Wartości te są dane dla każdej
częstotliwości ωj, j=1,…, Nω, z określonym krokiem ∆ω, przy czym liczba repetycji punktów dla każdej częstotliwości wynosi K. W zapisie wektorowym dysponujemy zatem wektorem
, j=1,…,N)( jk jX ω ω, k=1,…,K. Zadanie estymacji polega na wyznaczeniu metodą punkt po
punkcie charakterystyk częstotliwościowych podsystemów dla wszystkich częstotliwości. Rozważania w ramach tego rozdziału opierają się na następujących założeniach:
• wartości Ck(jωj) (wejścia do systemu) tworzą ciąg niezależnych zmiennych nie skorelowanych z zakłóceniami, j=1,…,Nω, k=1,…,K,
• wartości Yk(jωj)(wyjścia z systemu) można zmierzyć dla każdej realizacji wektorów Ck(jωj), j=1,…,Nω, k=1,…,K.
W pracy przedstawiono dwa algorytmy estymacji charakterystyk częstotliwościowych zarówno dla modelu Hasiewicza, jak i modelu o strukturze jednowarstwowej.
Algorytmami o mniejszej złożoności obliczeniowej są algorytmy jednostopniowe. Działanie algorytmów polega na określeniu wartości U(jωj) (j=1, 2,…, Nω) na podstawie pomiarów sygnałów wyjściowych oraz struktury systemu, a następnie wyznaczaniu punktów charakterystyki częstotliwościowej podsystemów na podstawie wyznaczonych sygnałów wejściowych U(jωj), C(jωj) oraz wyjściowych Y(jωj) dla wszystkich częstotliwości (j= 1, 2, ..., Nω) i wszystkich podsystemów (i=1, 2, ..., n). Stosowalność algorytmów jednostopniowych jest ograniczona do systemów szeregowo równoległych.
Algorytmami o szerszej stosowalności są algorytmy dwustopniowe. W tych algorytmach wyznaczenie punktu charakterystyki częstotliwościowej odbywa się w dwóch etapach. Pierwszy etap polega na wyznaczeniu właściwości systemu złożonego jako całości (macierz G(jωj) dla j=1,2,...,Nω). Natomiast drugi etap polega na wyznaczeniu właściwości poszczególnych podsystemów na podstawie właściwości całego systemu oraz topologii połączeń podsystemów. Schematy blokowe algorytmów dwustopniowych dla modelu Hasiewicza i jednowarstwowego zostały przedstawione na rys.4.1.
Przeprowadzono również analizę wiarygodności rezultatów wyników identyfikacji z wykorzystaniem logarytmicznych funkcji wrażliwości. Wyznaczanie logarytmicznych funkcji wrażliwości dla dowolnych topologii połączeń podsystemów w systemie jest możliwe, okazało się jednak implementacyjnie trudne do zrealizowania. Dlatego wyznaczano funkcje wrażliwości w mniej dokładny, ale za to prostszy implementacyjnie sposób. Metoda polega na symulowaniu nieznacznych względnych zmian (np. o 5%) właściwości poszczególnych modeli podsystemów dla określonej częstotliwości i wyznaczaniu względnych zmian właściwości całego modelu systemu w poszczególnych torach. Można w ten sposób otrzymać wrażliwości dla określonych punktów charakterystyk częstotliwościowych.
12

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
j = 1
i = 1
i < n ?
j < Nω ?
Ti = i + 1
j = j + 1
START
STOP
)()(ˆ)( **j
Kjij
Ki jCjGHjU ωωω =
[ ] ( ) 1* )()()()()(ˆ)(ˆ −
= j
Tijij
Tij
Kijiji jWjWjWjYjBjA ωωωωωω
KROK 4a
KROK 5a
KROK 4b
N
T
N
)(ˆ)(ˆ)(ˆ)(ˆ
)(ˆ)(ˆ)(ˆ)(ˆ)(ˆ1
)()()()(
ji
ijijiiji
T
ji
iji
i
T
ji
iji
iji
jGHjAjGjB
jGHjGHjGHjGjA
ωωωω
ωωωωω
−=
=
−
1**** )()()()()(ˆ
−
= j
TK
jK
j
TK
jK
j jCjCjCjYjG ωωωωωj = 1
i = 1
i < n ?
j = Nω ?
T
N
i = i + 1
j = j + 1
START
STOP
)(~)()(ˆ)( ***j
Kij
Kjij
Ki jCHjCjGHjU ωωωω +=
T
N
1**** )()()()()(ˆ
−
= j
TK
jK
j
TK
jK
j jCjCjCjYjG ωωωωω
1**** )()()()()(ˆ
−
= j
TKii
Kij
TKij
Kij
Ki jUjUjUjYjA ωωωωω
a) model Hasiewicza b) model jednowarstwowy
Rys.4.1. Schemat blokowy dwustopniowego algorytmu estymacji systemów Hasiewicza
4.1. Identyfikacja fizykalnego modelu parownika w dziedzinie częstotliwości
Powyższy algorytm dwustopniowy wykorzystano do identyfikacji fizykalnego modelu parownika kotła BP-1150. Zastosowanie wspomnianej procedury do identyfikacji samego parownika, a nie jego modelu fizykalnego, okazało się niemożliwe z dwóch powodów: 1) ograniczona dostępność pomiarowa w systemie (sygnały Mcyr, hw, Msep, hsep nie są mierzone), przez co nie jest możliwe wyznaczenie właściwości poszczególnych podsystemów parownika oraz 2) nieokresowy charakter mierzonych sygnałów. Wymagane jest, aby składowa zmienna tych sygnałów była okresowa i posiadała możliwie bogate widmo częstotliwościowe, a sygnały pomiarowe nie spełniają żadnego z tych warunków.
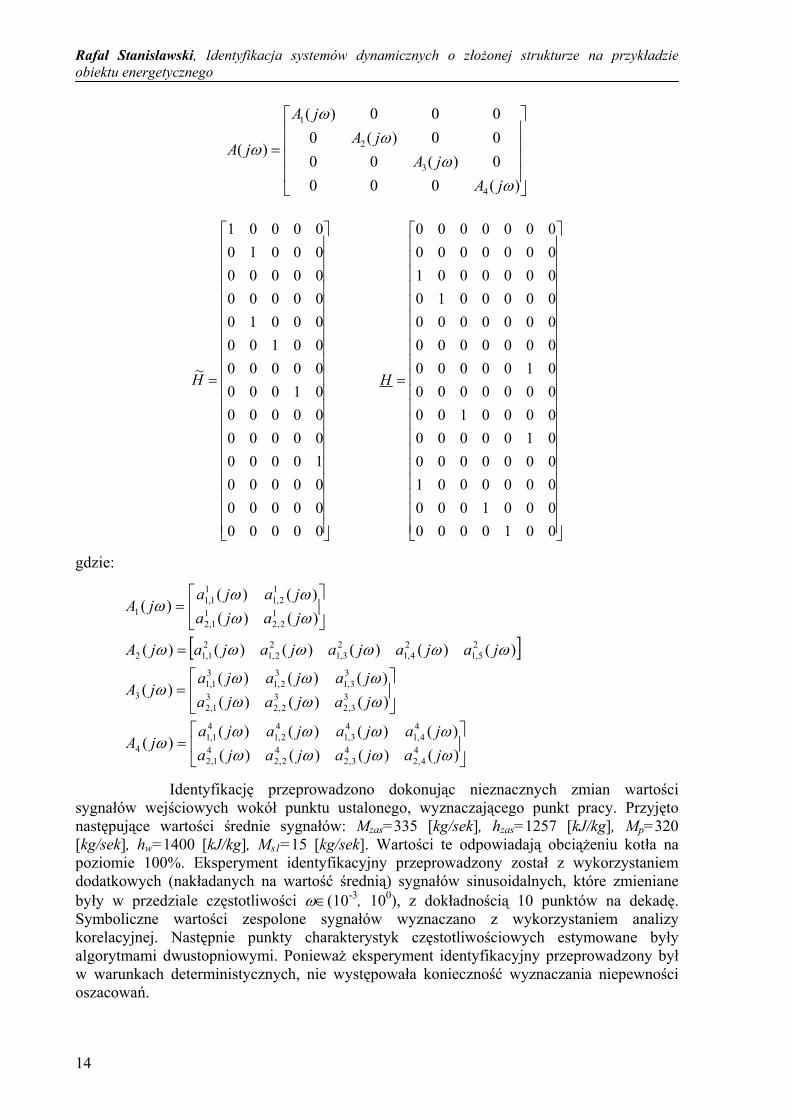
Model parownika, którego schemat blokowy został przedstawiony na rys 2.4, może zostać opisany zarówno strukturą Hasiewicza, jak i modelem jednowarstwowym. Założono następującą kolejność podsystemów: 1) pompa, 2) mieszalnik, filtr i rurociągi doprowadzające, 3) rury ekranowe, 4) separator. W takim przypadku dla struktury jednowarstwowej macierze A(jω), H oraz H~ są następujące
13
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
=
)(0000)(0000)(0000)(
)(
4
3
2
1
ωω
ωω
ω
jAjA
jAjA
jA
=
0000000000000001000000000000000100000000001000001000000000000001000001
~H
=
00100000001000000000100000000100000000010000000000100000000000000000000000010000000100000000000000
H
gdzie:
=
)()()()(
)( 12,2
11,2
12,1
11,1
1 ωωωω
ωjajajaja
jA
)()()( 22,1
21,12 ωωω jajajA = [ ])()()( 2
5,12
4,12
3,1 ωωω jajaja
=
)()()()()()(
)( 33,2
32,2
31,2
33,1
32,1
31,1
3 ωωωωωω
ωjajajajajaja
jA
=
)()()()()()()()(
)( 44,2
43,2
42,2
41,2
44,1
43,1
42,1
41,1
4 ωωωωωωωω
ωjajajajajajajaja
jA
Identyfikację przeprowadzono dokonując nieznacznych zmian wartości sygnałów wejściowych wokół punktu ustalonego, wyznaczającego punkt pracy. Przyjęto następujące wartości średnie sygnałów: Mzas=335 [kg/sek], hzas=1257 [kJ/kg], Mp=320 [kg/sek], hw=1400 [kJ/kg], Ms1=15 [kg/sek]. Wartości te odpowiadają obciążeniu kotła na poziomie 100%. Eksperyment identyfikacyjny przeprowadzony został z wykorzystaniem dodatkowych (nakładanych na wartość średnią) sygnałów sinusoidalnych, które zmieniane były w przedziale częstotliwości ω∈(10-3, 100), z dokładnością 10 punktów na dekadę. Symboliczne wartości zespolone sygnałów wyznaczano z wykorzystaniem analizy korelacyjnej. Następnie punkty charakterystyk częstotliwościowych estymowane były algorytmami dwustopniowymi. Ponieważ eksperyment identyfikacyjny przeprowadzony był w warunkach deterministycznych, nie występowała konieczność wyznaczania niepewności oszacowań.
14
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
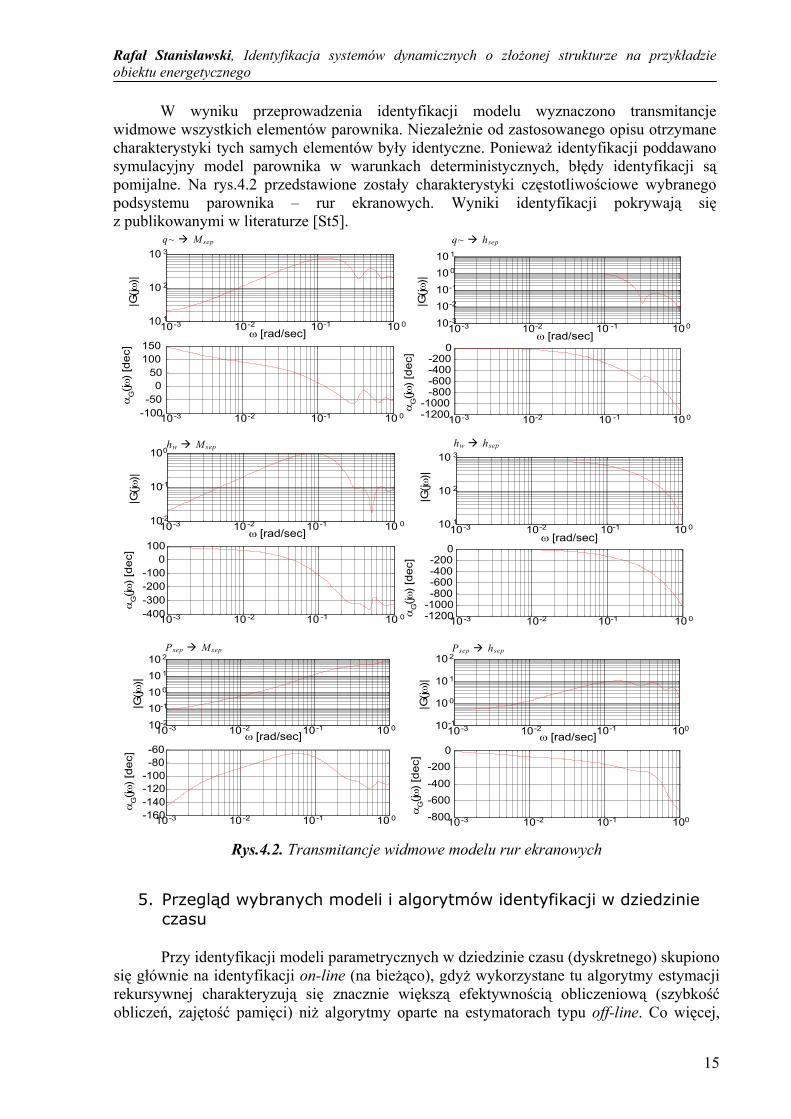
W wyniku przeprowadzenia identyfikacji modelu wyznaczono transmitancje widmowe wszystkich elementów parownika. Niezależnie od zastosowanego opisu otrzymane charakterystyki tych samych elementów były identyczne. Ponieważ identyfikacji poddawano symulacyjny model parownika w warunkach deterministycznych, błędy identyfikacji są pomijalne. Na rys.4.2 przedstawione zostały charakterystyki częstotliwościowe wybranego podsystemu parownika – rur ekranowych. Wyniki identyfikacji pokrywają się z publikowanymi w literaturze [St5].
10-3 10-2 10 -1 10010-3
10-2
10-1
10 0
10 1
10-3 10-2 10 -1 100-1200-1000
-800-600-400-200
0ω [rad/sec]
|G(jω
)|α
G(jω
) [d
ec]
10-3 10-2 10-1 10010-1
10 0
10 1
10 2
10-3 10-2 10-1 100-800-600-400
-2000
|G(jω
)|α
G(jω
) [d
ec]
ω [rad/sec]
Psep hsep
10-3 10-2 10-1 10 010 1
10 2
10 3
10-3 10-2 10-1 10 0-1200-1000-800-600-400-200
0ω [rad/sec]
αG(jω
) [d
ec]
|G(jω
)|
q~ hsep
10-3 10-2 10-1 10 010-2
10-1
10 0
10 1
10 2
10-3 10-2 10-1 10 0-160-140-120-100-80-60
ω [rad/sec]
|G(jω
)|α
G(jω
) [d
ec]
Psep M sep
10-3 10-2 10-1 10 010 1
10 2
10 3
10-3 10-2 10-1 10 0-100-50
050
100150
ω [rad/sec]
αG(jω
) [d
ec]
|G(j ω
)|
q~ M sep
10-3 10-2 10-1 10 010-2
10-1
100
10-3 10-2 10 -1 10 0-400-300-200-100
0100
hw M sep
|G(jω
)|α
G(jω
) [d
ec]
ω [rad/sec]
hw hsep
Rys.4.2. Transmitancje widmowe modelu rur ekranowych
5. Przegląd wybranych modeli i algorytmów identyfikacji w dziedzinie czasu
Przy identyfikacji modeli parametrycznych w dziedzinie czasu (dyskretnego) skupiono
się głównie na identyfikacji on-line (na bieżąco), gdyż wykorzystane tu algorytmy estymacji rekursywnej charakteryzują się znacznie większą efektywnością obliczeniową (szybkość obliczeń, zajętość pamięci) niż algorytmy oparte na estymatorach typu off-line. Co więcej,
15

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
wykorzystane tu algorytmy estymacji adaptacyjnej umożliwiają śledzenie zmian parametrów niestacjonarnego systemu.
Rozważany w pracy schemat procesu identyfikacji systemu liniowego został przedstawiony na rys. 5.1. Schemat ten jest słuszny także dla pewnej klasy systemów nieliniowych [LM2].
System
Regresorx
Estymator
Z(t)
U(t) Y(t)
Filtr
Filtr Filtr
)(ˆ tY
)(tY )(ˆ tY
)(tΦ
θ̂
e(t)
x - iloczyn macierzy
Rys.5.1. Schemat blokowy procesu identyfikacji Rozpatrywany system wielowymiarowy posiada nu wejść ui(t), i=1,2,…,nu, ny wyjść yi(t), i=1,2,…,ny, oraz nz zakłóceń mierzalnych zi(t), i=1,2,…,nz, ponadto oddziałują na niego dodatkowe, niemierzalne zakłócenia oznaczane symbolem e(t).
Z problemem identyfikacji on-line związane są następujące zagadnienia:
• Dobór klasy modelu, który może zostać przedstawiony w formie liniowego równania regresji, tj. jako iloczyn regresora Φ(t) oraz wektora lub macierzy nieznanych parametrów θ. Z rodzajem modelu powiązana jest postać regresora.
• Dobór estymatora rekursywnego, czyli algorytmu rekursywnie wyznaczającego kolejne przybliżenia optymalnych oszacowań wektora (lub macierzy) nieznanych parametrów θ.
θ̂
• Dobór filtrów adaptacyjnych, stosowanych w celu „wygładzenia” sygnałów pomiarowych.
• W przypadku identyfikacji systemu z uwzględnieniem podziału na podsystemy przy znanej topologii połączeń, występuje dodatkowy problem polegający na identyfikacji własności poszczególnych podsystemów na podstawie wyznaczonych parametrów całego systemu.
5.1. Wielowymiarowe modele proste (MIMO)
Spośród modeli wielowymiarowych poddane analizie zostały dobrze znane modele
szeroko wykorzystywane w wielu zastosowaniach (ARX w pełnej formie wielomianowej,
16
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
w postaci diagonalnej), modele wykorzystywane dotychczas jedynie w układach jednowymiarowych, a uogólnione na postać wielowymiarową przez autora (modele oparte na funkcjach bazy ortonormalnej, koncepcji modelowania inwersyjnego OBF i modele w wersji „Offset Deviational”) oraz modele zaproponowane przez autora pracy (modele „z całkowaniem” i ARX ze wspólnym mianownikiem).
Filtry ortonormalne z grupy OBF (ang. Orthonormal Basis Functions) skupiają
ostatnio znaczne zainteresowanie w zakresie teorii i zastosowania ich do identyfikacji systemów. Do podstawowych prac poświęconych tej tematyce należą [WaM, HHB]. Istnieje także wiele opracowań dotyczących rekursywnej identyfikacji z wykorzystaniem modeli opartych na filtrach Laguerre’a i Kautza należących do klasy OBF [BHN, Dum, LM1, LRM, LRO, SML], dotyczących jednak wyłącznie obiektów jednowymiarowych.
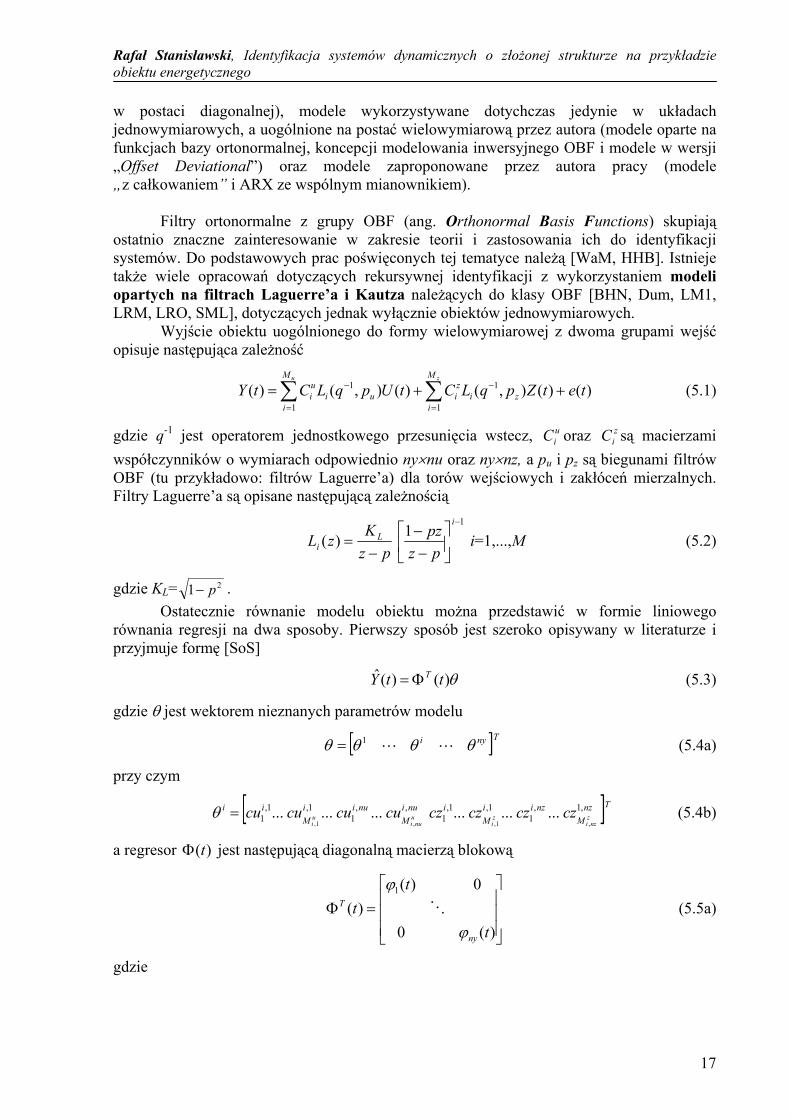
Wyjście obiektu uogólnionego do formy wielowymiarowej z dwoma grupami wejść opisuje następująca zależność
(5.1) )()(),()(),()(1
1
1
1 tetZpqLCtUpqLCtYzu M
izi
zi
M
iui
ui ++= ∑∑
=
−
=
−
gdzie q-1 jest operatorem jednostkowego przesunięcia wstecz, oraz są macierzami współczynników o wymiarach odpowiednio ny×nu oraz ny×nz, a p
uiC z
iCu i pz są biegunami filtrów
OBF (tu przykładowo: filtrów Laguerre’a) dla torów wejściowych i zakłóceń mierzalnych. Filtry Laguerre’a są opisane następującą zależnością
1
1)(−
−
−−
=i
Li pz
pzpz
KzL i=1,...,M (5.2)
gdzie KL= 21 p− . Ostatecznie równanie modelu obiektu można przedstawić w formie liniowego
równania regresji na dwa sposoby. Pierwszy sposób jest szeroko opisywany w literaturze i przyjmuje formę [SoS]
(5.3) θ)()(ˆ ttY TΦ=
gdzie θ jest wektorem nieznanych parametrów modelu
[ ]Tnyi θθθθ LL1= (5.4a)
przy czym
[ ]TnzM
nziiM
inuiM
nuiiM
iznzi
zi
unui
ui
czczczczcucucucu ,1,1
1,1,1
,,1
1,1,1
,1,,1,..................=iθ (5.4b)
a regresor jest następującą diagonalną macierzą blokową )(tΦ
(5.5a)
=Φ)(0
0)()(
1
t
tt
ny
T
ϕ
ϕO
gdzie
17

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
=
−−−−
−−−−
)(),(...)(),(...)(),(...)(),(
)(),(...)(),(...)(),(...)(),()(
,1
,1
111,1
11,1
1
,1
,1
111,1
11,1
1
,1,
,1,
tzpqLtzpqLtzpqLtzpqL
tupqLtupqLtupqLtupqLt
nzznziMnz
znzi
ziM
zi
nuu
nuiMnuu
nuiuiM
ui
iz
nzizi
unui
uiϕ
(5.5b)
Wadą zapisu (5.3) jest fakt, że regresor )(tΦ jest macierzą rzadką. Duża liczba zer w regresorze negatywnie wpływa na właściwości macierzy kowariancyjnej przy estymacji parametrów (szczególnie przy estymacji algorytmem ALS), co z kolei pogarsza jakość identyfikacji takich modeli [La1].
O wiele lepsze właściwości statystyczne posiadają modele opisane za pomocą następującego równania [La1]
(5.6) )()(ˆ ttY T Φ= θ
gdzie θ jest macierzą nieznanych parametrów, zaś )(tΦ jest wektorem regresora. Wielkości te dla równania systemu (5.1) można przedstawić w postaci
=θ (5.7)
nznyM
nznynyM
ny
nzM
nzM
nunyM
nunynyM
ny
nuM
nuM
znz
z
znz
z
unu
u
unu
u
czczczcz
czczczcz
cucucucu
cucucucu
,,1
1,1,1
,1,11
1,11,11
,,1
1,1,1
,1,11
1,11,11
......
......
......
......
1
1
1
1
MM
T
nzznzMnz
znz
zM
z
nuunuMnu
unu
uM
u
tzpqLtzpqLtzpqLtzpqL
tupqLtupqLtupqLtupqLt
znz
z
unu
u
=Φ
−−−−
−−−−
)(),(...)(),(...)(),(...)(),(
)(),(...)(),(...)(),(...)(),()(
11111
111
11
11111
111
11
1
1
(5.8)
Regresor (5.8) w tej metodzie jest wektorem pełnym, co daje dobre własności macierzy kowariancyjnej przy estymacji metodą ALS, a przez to lepsze wyniki identyfikacji w porównaniu z przypadkiem, gdy wykorzystane jest równanie (5.3). Zatem jeśli stosowanie postaci (5.3) równania regresji nie jest niezbędne, rekomenduje się postać (5.6).
Koncepcja modelowania odwrotnego została wprowadzona przez grupę prof. Latawca w pracach [LM2, LMH, LMR], które dotyczą jedynie systemów jednowymiarowych. Modele wykorzystujące tę koncepcję są w szczególności rekomendowane do modelowania systemów znajdujących się w pobliżu granicy stabilności i systemów niestabilnych, a także systemów nieliniowych. Ostatecznie wyprowadzone w pracy odwrotne modele Laguerre’a dla rozpatrywanego systemu są następujące
Y (5.9a) )(),()()(),()(ˆ1
10
1
1z
M
iui
ziu
M
iyi
yi dtZpqLCdtUtYpqLCt
ZY
−+−+−= ∑∑=
−
=
− β
gdzie , albo ( )+= 000
URβ
Y (5.9b) )()(),()(),()(ˆ0
1
1
1
1z
M
iuui
ui
M
iyi
yi dtZdtUpqLCtYpqLCt
UY
−+−+−= ∑∑=
−
=
− β
gdzie , przy czym jest prawostronną inwersją minimalnonormową lub lewostronną inwersją minimalnokwadratową współczynnika macierzowego R
( )+= 000
ZRβ ( )+
00R0 [RaM, LBT,
18

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
LHS]. Równania (5.9a) i (5.9b) mogą ponownie zostać przedstawione w formie regresji liniowej zarówno (5.3), jak i (5.6).
Uwagi:
1) Zauważmy, że przy finalnym wykorzystaniu modeli (5.9a) i (5.9b) do estymacji, nie ma potrzeby posługiwania się żadnymi inwersjami uogólnionymi. Faktycznie, estymacji podlegają bezpośrednio parametry filtrów Laguerre’a i współczynnik β0, niezależnie od tego, jakie są ich związki z parametrami wielomianów macierzowych
i (oraz G i G ). )( 1−qRU )( 1−qRZ )( 1−qU )( 1−qZ
2) W praktyce ostateczny wybór jednego z modeli (5.9a) lub (5.9b) zależy od tego, które z wymuszeń, tj. wejście U czy zakłócenie mierzalne Z, jest bardziej zaszumione. Jeśli wariancja sygnału wejściowego jest większa niż wariancja zakłóceń mierzalnych, wówczas wybieramy model (5.9a) (unikamy obecności większej liczby mocno zaszumionych pomiarów wejścia w regresorze). Jeśli natomiast wariancja zakłóceń mierzalnych jest większa od sygnału wejściowego, wówczas wybieramy model (5.9b).
Przy identyfikacji systemu na bazie odwrotnych modeli Laguerre’a, oprócz założenia biegunów wiodących p dla obu grup filtrów Laguerre’a, należy dobrać opóźnienia w torach U Y (opóźnienie du) oraz Z Y (opóźnienie dz). Stanowi to utrudnienie zadania identyfikacji, jednak nawet bardzo zgrubny i niedokładny dobór parametrów może zapewniać dobre rezultaty otrzymywane za pomocą omawianego modelu [LM1, LM2, LMH, LMR].
Przy założeniu, że badany system znajduje się na granicy stabilności można z góry przyjąć, że jeden z jego biegunów przyjmuje wartość z0=1. System posiada wówczas całkujący charakter, który może zostać uwzględniony poprzez tworzenie modelu „z całkowaniem”. Równanie systemu z rys.5.1 opisuje wówczas zależność
)()()()1(
1)()()1(
1)( 11
11 tetZqG
qtUqG
qtY zu +
−+
−= −
−−
− (5.10)
gdzie )()1()( 111 −−− −= qGqqG uu i )()1()( 111 −−− −= qGqq zzG . Traktując jako operator różnicowania, równanie (5.10) może zostać przedstawione w postaci
11 −−=∆ q
)(')()()()()( 11 tetZqGtUqGtY zu ++=∆ −− (5.11)
gdzie . Wyznaczane są zatem przez model nie wartości wyjść lecz ich przyrosty. Następnie w celu wyznaczenia Y(t) należy sygnał wyjściowy z systemu poddać całkowaniu (dyskretnemu).
)()(' tete ∆=
Modele „z całkowaniem” ograniczają wpływ zjawisk nieliniowości oraz zmian punktów pracy zachodzących w badanych systemach. Jednak wadą takiego modelowania jest „wzmocnienie” składowej stochastycznej, szczególnie w systemach z „szybkimi” zakłóceniami. Dlatego w praktyce należy takie modelowanie łączyć z algorytmami filtrującymi sygnały pomiarowe w celu usunięcia składowych wysokoczęstotliwościowych widma. Wybranym technikom filtrowania poświęcony został osobny podrozdział pracy.
Wyjście modelu „z całkowaniem” przy wykorzystaniu odwrotnych modeli Laguerre’a wyznaczane jest przez następujące zależności
Y = (5.12) )(),()()(),()(ˆ1
10
1
11z
M
izi
ziu
M
iyi
yi dtZpqLCdtUtYpqLCqt
ZY
−+−+
− ∑∑
=
−
=
−− β
dla modelu (5.9a) oraz
19
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
Y = (5.13) )()(),()(),()(ˆ0
1
1
1
11z
M
iuui
ui
M
iyi
yi dtZdtUpqLCtYpqLCqt
UY
−+−+
+ ∑∑
=
−
=
−− β
dla modelu (5.9b).
5.2. Estymacja parametrów modeli obiektów wielowymiarowych
Estymacja parametrów modelu badanego systemu może odbywać się na dwa sposoby. Pierwszy sposób polega na wykonaniu eksperymentu identyfikacyjnego w celu zebrania wszystkich danych pomiarowych, a następnie na ich podstawie przeprowadza się estymację parametrów. Takie metody nazywa się off-line albo metodami wsadowymi. Drugi natomiast polega na wyznaczaniu parametrów rekursywnie, tzn. każdy kolejny pomiar sygnałów na bieżąco aktualizuje wartości estymat. Te metody są nazywane rekursywnymi albo on-line. Metody rekursywne mają znacznie szersze zastosowania od metod off-line i do głównych ich zalet należą: 1) małe wymagania dotyczące pamięci, ponieważ nie wymagają gromadzenia historycznych danych pomiarowych, 2) mogą być stosowane do algorytmów działających w czasie rzeczywistym, używanych do śledzenia parametrów systemów niestacjonarnych.
Analizowano metody LMS (ang: Least Mean Squares), RLS (ang: Recursive Least Squares) oraz algorytm ALS (ang.: Adaptive Least Squares).
Estymator rekursywny/adaptacyjny parametrów modelu według najmniejszych kwadratów (RLS/ALS) ma postać [La1]
[ ])(ˆ)()()1(ˆ)(ˆ tYtYtLtt TT −+−= θθ (5.14)
gdzie:
) (5.15a) 1(ˆ)1()(ˆ −−Φ= tttY TT θ
−Φ−−Φ+−Φ−= )1()1()1()(
)(/)1()1()(2
1 ttPtttttPtL T
λλ (5.15b)
[ ] )(/)1()1()()( 1 ttPttLItP T λ−−Φ−= (5.15c)
przy czym λ1(t) oraz λ2(t) są współczynnikami zapominania, L(t) jest wzmocnieniem Kalmana, P(t) jest macierzą kowariancyjną, a i są wartościami początkowymi algorytmu. Często przyjmuje się 0 , P(0)=10
)0(θ̂ )0(P)0(ˆ =θ 5 I.
Dla systemów stacjonarnych przyjmuje się 1)()( 21 == tt λλ , a algorytm (5.14, 5.15a-c) nazywany jest algorytmem RLS. Zalety algorytmu RLS takie, jak szybka zbieżność, czy w wersji adaptacyjnej dobre zdolności śledzenia zmian parametrów, zostały dokładnie opisane w literaturze [ArF, AW3, ILM, NGW, SK3, SK4]. Wprowadzając do algorytmu RLS mechanizm zapominania wykładniczego zakłada się λ1(t)≠λ2(t) i 1)(1 <tλ , 2)(2 <tλ . Wówczas algorytm (5.14, 5.15a-c) nazywany jest algorytmem ALS. Posiada on własności śledzenia zmian parametrów w systemach niestacjonarnych [Lj1, LjG]. Z drugiej jednak strony estymator ALS nie jest odporny na słabe pobudzenie, co może prowadzić do „wybuchania” macierzy kowariancyjnej [AW3, LHT, Lan]. Konieczny jest zatem ekspercki nadzór nad wartościami elementów macierzy kowariancyjnej, co może skomplikować algorytm ALS.
20

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
Algorytm LMS jest algorytmem rekursywnym znacznie prostszym od omówionego wcześniej. Zasada działania takiego algorytmu jest podobna do RLS, jedyną różnicą jest zastąpienie wzmocnienia Kalmana L(t) (wzory (5.15b-c)) prostą zależnością
)()( ttL Φ= µ (5.16)
przy czym µ jest współczynnikiem wzmocnienia dobieranym w zależności od szybkości zmian parametrów w systemie. Zbyt wysoka wartość µ prowadzi do niestabilności numerycznej algorytmu i należy ją dobierać indywidualnie do każdego modelu. Przedstawiony algorytm LMS posiada zarówno istotne zalety, jak i pewne wady. Główną zaletą jest brak problemów związanych z „wybuchaniem” macierzy kowariancyjnej (w przeciwieństwie do algorytmu ALS). Do głównych wad natomiast można zaliczyć mniejszą szybkość zbieżności takiego algorytmu w porównaniu z ALS. Estymator LMS rekomenduje się do stosowania wszędzie tam, gdzie algorytm RLS/ALS nie mógł znaleźć zastosowania ze względu na problemy obliczeniowe i numeryczne. Dokładniejszą analizę algorytmów LMS można znaleźć w pracach [SLA, ALS, WK1].
5.3. Filtracja sygnałów
Przy estymacji parametrów modeli na podstawie sygnałów pomiarowych zawierających silne składowe stochastyczne, błędy estymacji parametrów mogą być duże. Aby ograniczyć to zjawisko, można stosować filtrowanie wielkości pomiarowych [AW3, DeG, HLT, Lan, LSM, MSH, RPS, SMS, YoC]. Parametry modelu są wówczas wyznaczane na podstawie sygnałów filtrowanych. W ten sposób ograniczany zostaje wpływ składowych stochastycznych, a otrzymane modele prowadzą do uzyskania zdecydowanie mniejszych błędów predykcji. Do filtrowania sygnałów w takim zastosowaniu najbardziej efektywne wydają się być filtry adaptacyjne, ponieważ cechują się one dużą szybkością oraz możliwością dostosowywania się do zmian właściwości sygnałów. W pracy zastosowano dwa rodzaje filtrów adaptacyjnych. Jako pierwszy zostanie przedstawiony filtr I-go rzędu z przełączaniem, natomiast jako drugi filtr LMS oparty na modelu FIR również z przełączaniem.
Filtr I-go rzędu z przełączaniem polega na równoległym działaniu dwóch filtrów I-go rzędu o różnych wartościach parametru α. Wyznaczane są jednocześnie dwie wartości wyjściowe filtrów
( ) )()1(1)( 1111 txtxtx ff αα +−−= (5.17a) ( ) )()1(1)( 2222 txtxtx ff αα +−−= (5.17b)
przy czym parametry α1, α2 spełniają zależność α1 > α2. Jako sygnał wyjściowy z filtra wybierany jest albo w zależności od tego, czy względny błąd odpowiedzi filtra fx1
fx2
xxx f −
=δ przekroczy pewną wartość progową δ0. Opisuje to równanie
≤−
>−
=
02
2
02
1
)()()(
)(
)()()(
)()(
δ
δ
txtxtx
dlatx
txtxtx
dlatxtx f
f
ff
f (5.18)
21

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
W przypadku, kiedy błąd odpowiedzi filtra jest mniejszy od δ0, wówczas można filtrować „mocniej”. Kiedy natomiast błąd odpowiedzi przekroczy wartość progową, wówczas należy filtrować „słabiej”, aby sygnał filtrowany nadążał za zmianami sygnału wejściowego. Zastosowanie procedury przełączania w zadaniu filtracji za pomocą filtrów I-go rzędu sprawia, że filtr posiada dobre własności śledzenia (dzięki włączaniu „szybkiego” filtru przy dużych błędach śledzenia) i jednocześnie dobre właściwości filtrowania.
Filtrowanie LMS oparte na modelu FIR jest zdecydowanie bardziej zawansowanym algorytmem w porównaniu do algorytmu I-go rzędu „z przełączaniem”. Schemat blokowy układu został przedstawiony na rys.5.2.
FIR
LMS
x xf
θ̂
Rys. 5.2. Schemat blokowy filtra LMS
Sygnał wejściowy jest filtrowany przez model FIR, który wyznacza wartość wyjścia na podstawie zależności
(5.19) ∑=
−=n
iif itxbtx
0)()(
gdzie n oznacza rząd modelu, natomiast bi – współczynniki określające właściwości modelu. Równanie (5.19) może zostać przedstawione w postaci liniowego równania regresji
)(ˆ)( ttx Tf Φ= θ
gdzie
(5.20a) [ )1()2()1()()( +−−−=Φ ntxtxtxtxtT K ] [ ]n
T bbbb K210=θ (5.20b)
Estymator jest wyznaczany na podstawie algorytmu LMS. Parametr µ estymatora, podobnie jak w filtrach I-go rzędu, może przyjmować jedną z dwóch wartości
θ̂
≤−
>−
=
02
2
02
1
)()()(
)(
)()()(
)(
δµ
δµµ
txtxtx
dlat
txtxtx
dlat
f
f
(5.21)
przy czym µ1 > µ2. Kiedy błąd odpowiedzi filtra jest poniżej wartości δ0, wówczas algorytm LMS posiada dobrze dobrane parametry i współczynnik µ odpowiedzialny za prędkość zmian oszacowań może być niewielki. Kiedy natomiast różnica przekroczy δθ̂ 0, wówczas µ powinno przyjąć większą wartość tak, aby model nadążył za zmianami własności sygnałów.
22
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
5.4. Estymacja parametrów systemów złożonych
Rozważania w poprzednich podrozdziałach dotyczyły identyfikacji systemu bez wydzielania podsystemów. Opierając się na modelach systemu złożonego przedstawionych w rozdziale 3, autor rozwinął algorytmy identyfikacji on-line na systemy składające się ze zbioru podsystemów z określoną strukturą połączeń między nimi.
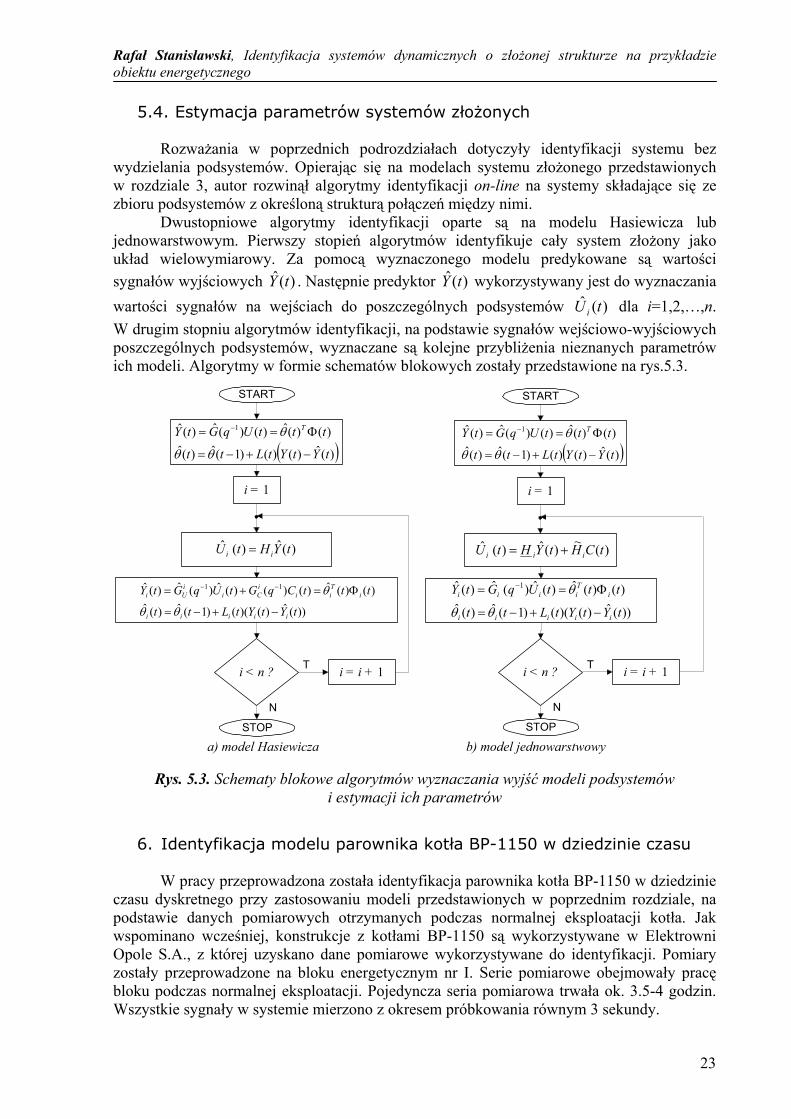
Dwustopniowe algorytmy identyfikacji oparte są na modelu Hasiewicza lub jednowarstwowym. Pierwszy stopień algorytmów identyfikuje cały system złożony jako układ wielowymiarowy. Za pomocą wyznaczonego modelu predykowane są wartości sygnałów wyjściowych Y . Następnie predyktor Y wykorzystywany jest do wyznaczania wartości sygnałów na wejściach do poszczególnych podsystemów U dla i=1,2,…,n. W drugim stopniu algorytmów identyfikacji, na podstawie sygnałów wejściowo-wyjściowych poszczególnych podsystemów, wyznaczane są kolejne przybliżenia nieznanych parametrów ich modeli. Algorytmy w formie schematów blokowych zostały przedstawione na rys.5.3.
)(ˆ t )(ˆ t)(ˆ ti
i = 1
)(ˆ)(ˆ tYHtU ii =
T
N
i = i + 1
START
STOP
i < n ?
( ))(ˆ)()()1(ˆ)(ˆ)()(ˆ)()(ˆ)(ˆ 1
tYtYtLtt
tttUqGtY T
−+−=
Φ== −
θθ
θ
))(ˆ)()(()1(ˆ)(ˆ)()(ˆ)()()(ˆ)(ˆ)(ˆ 11
tYtYtLtt
tttCqGtUqGtY
iiiii
iTii
iCi
iUi
−+−=
Φ=+= −−
θθ
θ
Wszystkie sygnały w systemie mierzono z okresem próbkowania równym 3 sekundy.
i = 1
)(~)(ˆ)(ˆ tCHtYHtU iii +=
T
N
i = i + 1
START
STOP
i < n ?
( ))(ˆ)()()1(ˆ)(ˆ)()(ˆ)()(ˆ)(ˆ 1
tYtYtLtt
tttUqGtY T
−+−=
Φ== −
θθ
θ
))(ˆ)()(()1(ˆ)(ˆ)()(ˆ)(ˆ)(ˆ)(ˆ 1
tYtYtLtt
tttUqGtY
iiiii
iTiiii
−+−=
Φ== −
θθ
θ
a) model Hasiewicza b) model jednowarstwowy
Rys. 5.3. Schematy blokowe algorytmów wyznaczania wyjść modeli podsystemów i estymacji ich parametrów
6. Identyfikacja modelu parownika kotła BP-1150 w dziedzinie czasu
W pracy przeprowadzona została identyfikacja parownika kotła BP-1150 w dziedzinie
czasu dyskretnego przy zastosowaniu modeli przedstawionych w poprzednim rozdziale, na podstawie danych pomiarowych otrzymanych podczas normalnej eksploatacji kotła. Jak wspominano wcześniej, konstrukcje z kotłami BP-1150 są wykorzystywane w Elektrowni Opole S.A., z której uzyskano dane pomiarowe wykorzystywane do identyfikacji. Pomiary zostały przeprowadzone na bloku energetycznym nr I. Serie pomiarowe obejmowały pracę bloku podczas normalnej eksploatacji. Pojedyncza seria pomiarowa trwała ok. 3.5-4 godzin.
23
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
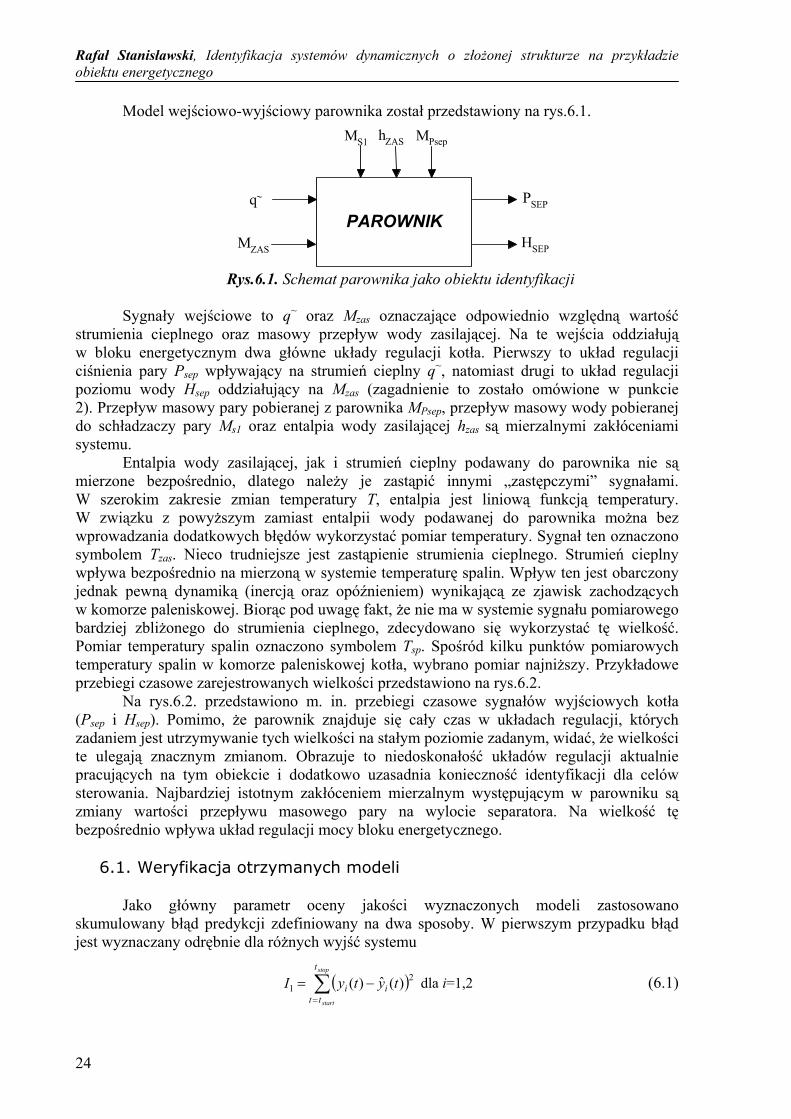
Model wejściowo-wyjściowy parownika został przedstawiony na rys.6.1.
hM M
PAROWNIKMZAS
q∼ PSEP
HSEP
ZASS1 Psep
Rys.6.1. Schemat parownika jako obiektu identyfikacji Sygnały wejści lędną wartość
strumienia cieplnego oraz masowy przepływ wody zasilającej. Na te wejścia oddziałują w blok
bezpośrednio, dlatego należy je zastąpić innymi „zastępczymi” sygnałami. W sze
h regulacji, których zadanie
wyznaczonych modeli zastosowano umulowany błąd predykcji zdefiniowany na dwa sposoby. W pierwszym przypadku błąd
jest wy
la i=1,2 (6.1)
owe to q~ oraz Mzas oznaczające odpowiednio wzg
u energetycznym dwa główne układy regulacji kotła. Pierwszy to układ regulacji ciśnienia pary Psep wpływający na strumień cieplny q~, natomiast drugi to układ regulacji poziomu wody Hsep oddziałujący na Mzas (zagadnienie to zostało omówione w punkcie 2). Przepływ masowy pary pobieranej z parownika MPsep, przepływ masowy wody pobieranej do schładzaczy pary Ms1 oraz entalpia wody zasilającej hzas są mierzalnymi zakłóceniami systemu.
Entalpia wody zasilającej, jak i strumień cieplny podawany do parownika nie są mierzone
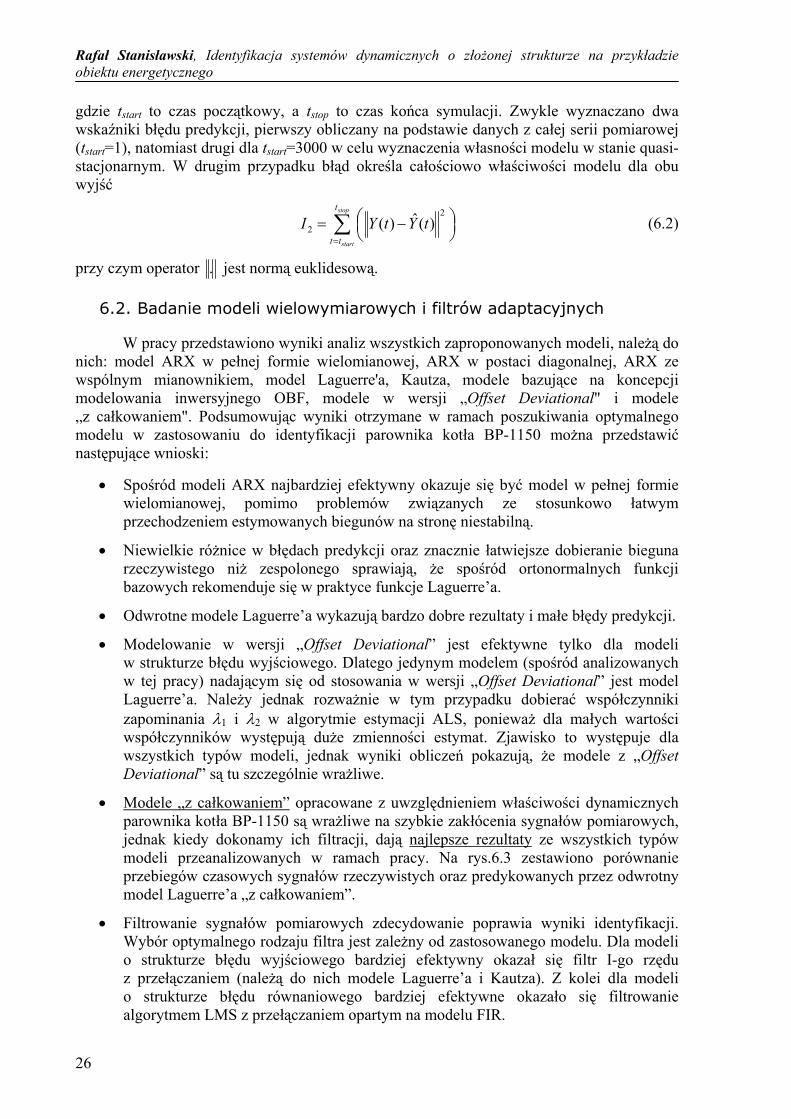
rokim zakresie zmian temperatury T, entalpia jest liniową funkcją temperatury. W związku z powyższym zamiast entalpii wody podawanej do parownika można bez wprowadzania dodatkowych błędów wykorzystać pomiar temperatury. Sygnał ten oznaczono symbolem Tzas. Nieco trudniejsze jest zastąpienie strumienia cieplnego. Strumień cieplny wpływa bezpośrednio na mierzoną w systemie temperaturę spalin. Wpływ ten jest obarczony jednak pewną dynamiką (inercją oraz opóźnieniem) wynikającą ze zjawisk zachodzących w komorze paleniskowej. Biorąc pod uwagę fakt, że nie ma w systemie sygnału pomiarowego bardziej zbliżonego do strumienia cieplnego, zdecydowano się wykorzystać tę wielkość. Pomiar temperatury spalin oznaczono symbolem Tsp. Spośród kilku punktów pomiarowych temperatury spalin w komorze paleniskowej kotła, wybrano pomiar najniższy. Przykładowe przebiegi czasowe zarejestrowanych wielkości przedstawiono na rys.6.2.
Na rys.6.2. przedstawiono m. in. przebiegi czasowe sygnałów wyjściowych kotła (Psep i Hsep). Pomimo, że parownik znajduje się cały czas w układac
m jest utrzymywanie tych wielkości na stałym poziomie zadanym, widać, że wielkości te ulegają znacznym zmianom. Obrazuje to niedoskonałość układów regulacji aktualnie pracujących na tym obiekcie i dodatkowo uzasadnia konieczność identyfikacji dla celów sterowania. Najbardziej istotnym zakłóceniem mierzalnym występującym w parowniku są zmiany wartości przepływu masowego pary na wylocie separatora. Na wielkość tę bezpośrednio wpływa układ regulacji mocy bloku energetycznego.
6.1. Weryfikacja otrzymanych modeli
Jako główny parametr oceny jakościsk
znaczany odrębnie dla różnych wyjść systemu
( )∑ −=stopt
ii tytyI 21 )(ˆ)( d
= starttt
24

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
0 2000 4000 6000 8000 10000 12000850
900
950
1000
1050
1100
1150
t [s]
Mza
s [to
n/h]
0 2000 4000 6000 8000 10000 120000
20
40
60
80
100
120
140
t [s]
Ms1
[ton
/h]
0 2000 4000 6000 8000 10000 12000268
269
270
271
272
273
274
275
276
t [s]
T zas [
stop
nie
C]
0 2000 4000 6000 8000 10000 12000770
780
790
800
810
820
830
840
850
860
t [s]
T sp [s
topn
ie C
]
0 2000 4000 6000 8000 10000 12000820
840
860
880
900
920
940
960
980
t [s]
MPs
ep [t
on/h
]
0 2000 4000 6000 8000 10000 12000180
182
184
186
188
190
192
194
t [s]
Pse
p [B
ar]
0 2000 4000 6000 8000 10000 1200010.5
11
11.5
12
12.5
13
13.5
14
14.5
15
Hse
p [m
]
t [s]
Rys.6.2. Przebiegi czasowe sygnałów wejściowych i wyjściowych kotła
25
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
gdzie tstart to czas początkowy, a tstop to czas końca symulacji. Zwykle wyznaczano dwa wskaźniki błędu predykcji, pierwszy obliczany na podstawie danych z całej serii pomiarowej (tstart=1), natomiast drugi dla tstart=3000 w celu wyznaczenia własności modelu w stanie quasi-stacjonarnym. W drugim przypadku błąd określa całościowo właściwości modelu dla obu wyjść
∑=
−=
stop
start
t
tttYtYI
2
2 )(ˆ)( (6.2)
przy czym operator . jest normą euklidesową.
6.2. Badanie modeli wielowymiarowych i filtrów adaptacyjnych
W pracy przedstawiono wyniki analiz wszystkich zaproponowanych modeli, należą do nich: model ARX w pełnej formie wielomianowej, ARX w postaci diagonalnej, ARX ze wspólnym mianownikiem, model Laguerre'a, Kautza, modele bazujące na koncepcji modelowania inwersyjnego OBF, modele w wersji „Offset Deviational" i modele „z całkowaniem". Podsumowując wyniki otrzymane w ramach poszukiwania optymalnego modelu w zastosowaniu do identyfikacji parownika kotła BP-1150 można przedstawić następujące wnioski:
• Spośród modeli ARX najbardziej efektywny okazuje się być model w pełnej formie wielomianowej, pomimo problemów związanych ze stosunkowo łatwym przechodzeniem estymowanych biegunów na stronę niestabilną.
• Niewielkie różnice w błędach predykcji oraz znacznie łatwiejsze dobieranie bieguna rzeczywistego niż zespolonego sprawiają, że spośród ortonormalnych funkcji bazowych rekomenduje się w praktyce funkcje Laguerre’a.
• Odwrotne modele Laguerre’a wykazują bardzo dobre rezultaty i małe błędy predykcji.
• Modelowanie w wersji „Offset Deviational” jest efektywne tylko dla modeli w strukturze błędu wyjściowego. Dlatego jedynym modelem (spośród analizowanych w tej pracy) nadającym się od stosowania w wersji „Offset Deviational” jest model Laguerre’a. Należy jednak rozważnie w tym przypadku dobierać współczynniki zapominania λ1 i λ2 w algorytmie estymacji ALS, ponieważ dla małych wartości współczynników występują duże zmienności estymat. Zjawisko to występuje dla wszystkich typów modeli, jednak wyniki obliczeń pokazują, że modele z „Offset Deviational” są tu szczególnie wrażliwe.
• Modele „z całkowaniem” opracowane z uwzględnieniem właściwości dynamicznych parownika kotła BP-1150 są wrażliwe na szybkie zakłócenia sygnałów pomiarowych, jednak kiedy dokonamy ich filtracji, dają najlepsze rezultaty ze wszystkich typów modeli przeanalizowanych w ramach pracy. Na rys.6.3 zestawiono porównanie przebiegów czasowych sygnałów rzeczywistych oraz predykowanych przez odwrotny model Laguerre’a „z całkowaniem”.
• Filtrowanie sygnałów pomiarowych zdecydowanie poprawia wyniki identyfikacji. Wybór optymalnego rodzaju filtra jest zależny od zastosowanego modelu. Dla modeli o strukturze błędu wyjściowego bardziej efektywny okazał się filtr I-go rzędu z przełączaniem (należą do nich modele Laguerre’a i Kautza). Z kolei dla modelo s iltrowanie algorytmem LMS z przełączaniem opartym na modelu FIR.
i trukturze błędu równaniowego bardziej efektywne okazało się f
26

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
2
192.5
19
193.5
194
p
194.5
3
[Bar
]
19
P se
190
190.5
191
191.5
4550
4600
4650
4700
4750
4800
t [s]
3400 3450 3500 3550 3600 3650 3700 3750
13.2
12
12.2
12.4
12.6
12.8
13
Hse
p [m
]
Rcza
t [s]
ys.6.3. Fragment przebiegu czasowego sygnałów wyjściowych rzeczywistych (kolor rny) oraz modelowanych za pomocą odwrotnego modelu Laguerre’a „z całkowaniem”
(kolor czerwony)
27
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
6.3. Badanie własności estymatorów
Estymatory RLS/ALS. W większości przypadków otrzymane błędy predykcji przy estymacji z zastosowaniem algorytmu RLS nie różniły się istotnie w porównaniu do ALS. Oczywiście zmniejszenie współczynnika λ1 do wartości λ1=0.999÷0.995 (przy λ2=1) powodowało poprawę wyników identyfikacji, jednak na ogół różnica nie była na tyle istotna, aby można było stwierdzić, że uwzględnianie niestacjonarności parownika było konieczne. Aby przyjrzeć się bliżej temu problemowi przeprowadzono eksperyment składający się z trzech części. W pierwszej kolejności estymowany był model systemu algorytmem RLS. Następnie opracowany w ten sposób model użyty został do predykowania sygnałów wyjściowych parownika, dla tych samych danych pomiarowych, na podstawie których był estymowany. Na koniec powtórzono eksperyment dla innej serii pomiarowej. Badanie przeprowadzono dla modeli „z całkowaniem”, ponieważ są one najbardziej efektywne w omawianym zastosowaniu spośród przebadanych modeli.
Błędy predykcji otrzymane na podstawie modelu wyznaczonego w oparciu o inną serię pomiarową, okazały się znacząco większe od błędów dla tej samej serii pomiarowej. W zależności od typu modelu wzrosły one o 50% dla bardzo odpornych na niestacjonarność systemu odwrotnych modeli Laguerre’a, aż do 1000% dla wrażliwych na to zjawisko prostych modeli Laguerre’a. Oznacza to, że w okresie między seriami pomiarowymi znacząco zmieniły się właściwości modelowanego parownika. W ramach jednej serii pomiarowej niestacjonarność była niewielka (wskazywały na to zbliżone wyniki identyfikacji RLS oraz ALS). Wynika z tego, że parametry obiektu zmieniają się na tyle wolno, że w ramach jednej serii pomiarowej niestacjonarność jest prawie niezauważalna. Jednak dla serii pomiarowych odległych w czasie zmiany właściwości systemu są już nie do pominięcia. Uzasadnia to stosowanie w pracy algorytmów estymacji adaptacyjnej.
Zaskakujący jest fakt, że zmiany parametrów nie wynikają wyłącznie ze zmiany punktu pracy parownika, a również zależą od innych nieznanych czynników. Wywnioskować to można z tego, że zmiana punktu pracy w każdej serii pomiarowej była dość istotna, a zmiany optymalnych parametrów modeli niewielkie. W różnych seriach pomiarowych parownik pracował w podobnych punktach pracy, jednak parametry różniły się dość znacznie. Na podstawie powyższych rozważań należy stwierdzić, że uwzględnianie w modelu niestacjonarności parownika jest niezbędne. Wyjątkiem mogą być odwrotne modele Laguerre’a. Modele te, nawet uśrednione, dają zadowalające rezultaty bez uwzględniania zmian parametrów. Powyższy eksperyment powtórzono dla modeli z estymatorem ALS dla współczynnika zapominania λ1=0.999. W symulacji drugiej (seria B), zamiast modelu uśrednionego zastosowano modele z estymatorem ALS. Jako parametry początkowe tych modeli wykorzystano końcowe estymaty modeli z identyfikacji (serii A). Algorytmy estymacji uwzględniające niestacjonarność parownika, nawet bardzo wolnozmienną (λ1=0.999), wykazywały bardzo dobrą dokładność identyfikacji systemu, zarówno dla serii A, jak i serii B. Estymator LMS. Jedną z istotnych wad algorytmu ALS jest możliwość występowania dużych wartości elementów macierzy kowariancyjnej podczas estymacji parametrów. Zjawisko to jest spowodowane sposobem wyznaczania macierzy kowariancyjnej P. W ekstremalnych przypadkach macierz kowariancyjna P może „wybuchnąć”. Mówimy wówczas o nie y kow
stabilności numerycznej algorytmu. Przebiegi czasowe zmian śladu macierzariancyjnej w czasie estymacji przedstawiono na rysunku 6.4.
28
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
t [s]1500 3000 4500 6000 7500 9000 10500
500
1000
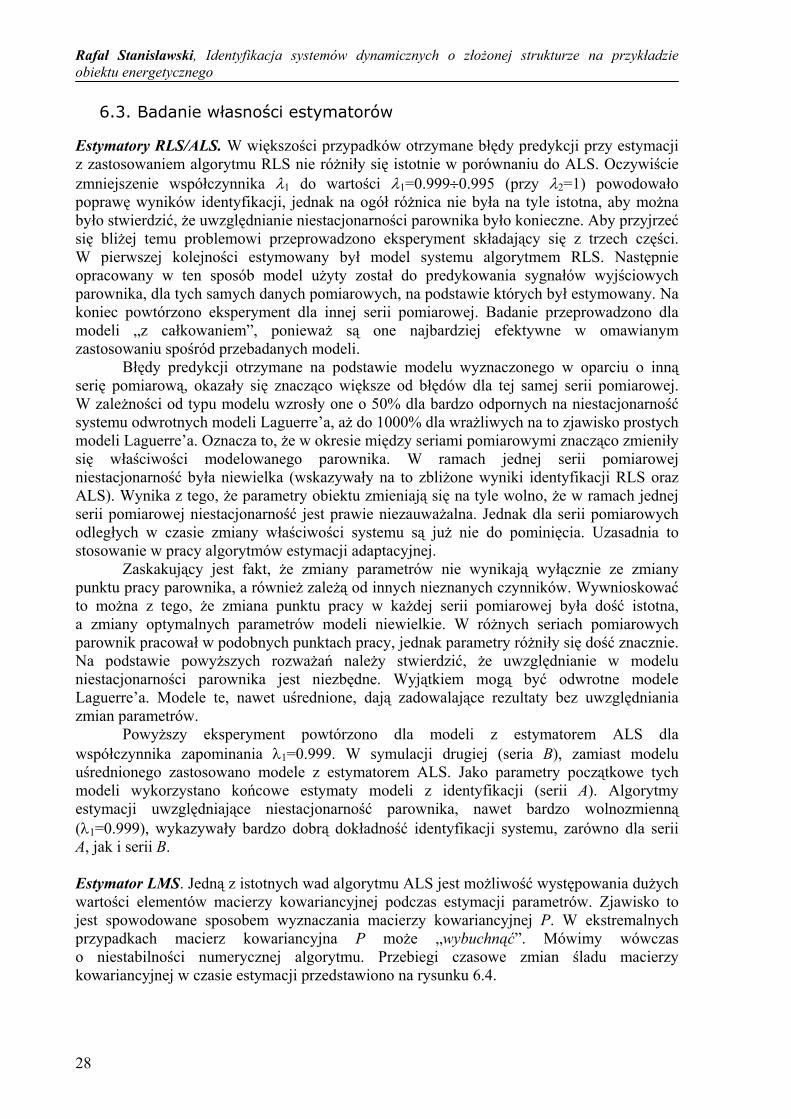
Rys.6.4. Przebiegi czasowe śladu macierzy kowariancyjnej podczas estymacji algorytmem ALS ze współczynnikiem λ1=0.99 (Kolory: niebieski – estymacja modelu ARX, czerwony –
estymacja odwrotnego Laguerre’a, zielony – estymacja parametrów Laguerre’a)
Rysunek pokazuje, że wartość śladu macierzy kowari
4500
1500
2000
2500
3000
3500
4000tr
[P(t)
]
ancyjnej zależy bardzo istotnie od
ć lepszą alternatywą od ALS.
wicza, jak i modelem jednowarstwowym. Podstawowym wymogiem iezbędnym do identyfikacji takiego systemu jest pełna dostępność pomiarowa wszystkich
• entalpia wody wpływającej do rur ekranowych parownika, • masa mieszaniny parowo-wodnej wpływającej do separatora,
rodzaju modelu. We wszystkich jednak przypadkach widoczny jest jego powolny trend wzrostowy. Przy długim czasie trwania identyfikacji ślad tej macierzy mógłby zacząć przyjmować wartości „niebezpieczne” dla modeli. Przed tym zagrożeniem można się zabezpieczyć np. resetując algorytm estymacji w momencie, kiedy wartość śladu przekroczy pewną krytyczną wartość. Można również wykorzystać inny, bardziej odporny algorytm estymacji LMS. Algorytmy z estymatorami LMS, jak pokazano w pracy, dają błędy predykcji większe od ALS, ale mniejsze niż algorytmy RLS. Kiedy więc nacisk przy identyfikacji jest położony na szybkość i niezawodność estymatora, a nie na minimalność błędu predykcji, algorytm LMS może by
6.4. Identyfikacja parownika jako systemu o złożonej strukturze
W pracy została przeprowadzona próba identyfikacji podsystemów parownika w dziedzinie czasu dyskretnego jako systemu o złożonej strukturze. Schemat powiązań podsystemów parownika został przedstawiony na rys.2.4 i może być opisany zarówno modelem Hasienwyróżnionych na rys.2.4 sygnałów. Okazuje się natomiast, że jedynym (z wymienionych na rys.2.4) mierzonym sygnałem wewnętrznym jest przepływ masowy wody przez pompę cyrkulacyjną Mcyr. Pozostałe sygnały wewnętrzne nie są dostępne pomiarowo. Należą do nich:
• masa kondensatu wypływającego z separatora,
29

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
• entalpia mieszaniny parowo wodnej wpływającej do separatora.
W celu rozwiązania powyższego problemu wykorzystano fizykalny model parownika kotła BP-1150. Sygnały niedostępne pomiarowo zostały wyznaczone na podstawie symulacji modelu w warunkach zbliżonych do panujących w systemie w czasie przeprowadzenia serii pomiarowej. Analiza pracy parownika pokazuje, że otrzymane wyniki symulacji modelu są obciążone około 7% błędem, który przekłada się na niższą jakość identyfikacji podsystemów. Jednak z drugiej strony, wykorzystanie wspomnianych „pomiarów” symulacyjnych w ogóle umożliwia wyznaczenie własności podsystemów.
Błędy predykcji sygnałów wyjściowych Psep i Hsep, generowane przez model systemu uwzględniającego podział na podsystemy, są dlatego około 5-krotnie większe niż w przypadku identyfikacji parownika jako obiektu wielowymiarowego. Wprowadzenie złożonego dwustopniowego algorytmu estymacji daje możliwości wyznaczania parametrów podsystemów. Jest to jednak realizowane kosztem własności modelu systemu jako całości (wielowymiarowego). Jeszcze większe wartości błędów predykcji otrzymane zostały dla niektórych sygnałów wewnętrznych, takich jak Mkond, Msep, czy Mcyr, co wskazuje na niedoskonałości wyznaczonych modeli podsystemów. Niewątpliwie istotny wpływ na jakość identyfikacji ma „uczestniczenie” w procesie estymacji parametrów „nierzeczywistych” sygnałów wyznaczanych na podstawie modelu fizykalnego, czyli „pomiarów” symulacyjnych.
wych systemów dynamicznych o złożonej strukturze. W przypadku modeli parametrycznych
zwrotnego. W zakresie nieliniowych systemów prostych otrzymano tu już wiele interesujących, nowych rezultatów [Gre, Ha4, LM ożliwie um obciążeniu obliczeniowym, jest warte wysiłku badawczego w przyszłości.
danie analizie innych wsadowych algorytmów estymacji, takich jak m etoda największej wiarygodności. Do k towania i przeprowadzenia eks y gorytmów identyfikacji
7. Kierunki dalszych badań W niniejszej pracy rozważano zagadnienia związane z identyfikacją linio
opisanych w czasie dyskretnym istotnym rozwinięciem może być przeniesienie przedstawionej metodologii na systemy nieliniowe. Ogólne podejście, traktujące model całego systemu jako hierarchiczny, zaś modele podsystemów jako uniwersalne aproksymatory w postaci sztucznych sieci neuronowych, prowadziłoby jednak w wielu praktycznych przypadkach do znacznych obciążeń obliczeniowych. Prostszym obliczeniowo rozwiązaniem byłoby przyjęcie modeli podsystemów w postaci połączenia statycznego elementu nieliniowego i dynamicznego elementu liniowego. Sposób połączeń elementów tworzących modele podsystemów będzie zależeć od przyjętej struktury podsystemów. Można wówczas otrzymać modele podsystemów np. w formie modeli Hammersteina, Wienera, Voltery, czy też z nieliniowością w pętli sprzężenia
H, LM2]. Rozszerzenie tych rezultatów na systemy złożone, przy miarkowanym
Z drugiej strony spośród rekursywnych algorytmów estymacji zostały poddane analizie algorytmy RLS / ALS oraz LMS. Niezbędne w ramach dalszych prac wydaje się być przeanalizowanie innych, nowszych algorytmów rekursywnej estymacji takich jak Newton LMS, Kalman LMS czy innych. Analiza efektywności przedstawionych algorytmów przeprowadzona była jedynie dla parownika kotła BP-1150, może więc być zbyt szczególna. Dokonanie głębszej analizy na innych procesach technologicznych może przynieść bardziej ogólne wnioski dotyczące własności wprowadzonych modeli. W przypadku identyfikacji nieparametrycznej wykorzystywano jedynie metodę najmniejszych kwadratów, natomiast wydaje się być wskazane pod
etoda zmiennych instrumentalnych, czy mdat owo, przeprowadzenie głębszej dyskusji zagadnienia projekper mentu identyfikacyjnego może podnieść stosowalność al
30
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
charakt zczególnego zadania
nież nowy dynamiczny model systemu złożonego nazwany systemem dn
dziedzinie częstotliwości na bazie istniejących algoryt
erystyk częstotliwościowych (nie było to konieczne dla sidentyfikacji parownika).
W części praktycznej pracy, wyznaczenie dla celów sterowania modelu parownika stanowi jedynie element w kierunku opracowania nowoczesnego systemu sterowania tym systemem. Natomiast analiza przebiegów sygnałów wyjściowych wskazuje, że systemy sterowania są niedoskonałe i niewątpliwie istnieją możliwości ich znaczącej poprawy.
Wreszcie zauważywszy, że niektóre podsystemy parownika (np. pompa, mieszalnik) można traktować jako wielowymiarowe obiekty niekwadratowe, tzn. obiekty o różnych liczbach wejść i wyjść. Obiekty takie wzbudziły ostatnio żywe zainteresowanie badawcze w kontekście „zer wielowymiarowych”, własności minimalnofazowości i sterowania minimalnowariancyjnego [La1, LaH, LBT, LHL, LHS, Tok]. Analiza niekwadratowych podsystemów parownika w takim kontekście mogłaby poszerzyć wiedzę o własnościach parownika i możliwościach jego ulepszonego sterowania (w porównaniu z tym, co oferują istniejące, klasyczne regulatory).
8. Wnioski
W pracy opracowano algorytmy identyfikacji dynamicznych liniowych systemów o złożonej strukturze, zarówno w dziedzinie częstotliwości jak i czasu (dyskretnego).
pracowano rówOje owarstwowym.
la systemów opisanych wDmów estymacji parametrów systemów statycznych opracowano jednostopniowe oraz
dwustopniowe algorytmy estymacji charakterystyk częstotliwościowych podsystemów systemu złożonego. Algorytmy zaimplementowano w programie MATLAB® jednak zastosowanie ich do identyfikacji parownika kotła BP-1150 okazało się niemożliwe co najmniej z dwóch powodów. Pierwszy polega na ograniczonej dostępności pomiarowej w systemie (nie wszystkie sygnały niezbędne do identyfikacji parownika z podziałem na podsystemy są mierzone), przez co nie jest możliwe wyznaczenie właściwości poszczególnych podsystemów parownika. Drugi powód wyznaczany jest przez charakter mierzonych sygnałów. Wymagane jest, aby składowa zmienna tych sygnałów była okresowa i posiadała możliwie bogate widmo częstotliwościowe. Natomiast rzeczywiste zmiany sygnałów nie mają charakteru okresowego, a ich widmo ogranicza się do występowania kilku wiodących składowych charakterystyki częstotliwościowej o dużej energii oraz niskoenergetycznych pozostałych składowych widma. Powyższe powody sprawiły, że zastosowano metodologię identyfikacji charakterystyk częstotliwościowych do identyfikacji fizykalnego modelu parownika (a nie rzeczywistego obiektu). Otrzymane wyniki potwierdzają własności modelu prezentowane w literaturze. W dziedzinie czasu (dyskretnego) wprowadzono nowy model wielowymiarowy z grupy modeli autoregresywnych nazwany ARX ze wspólnym mianownikiem, uogólniono na postać wielowymiarową modele Laguerre’a i Kautz’a. Uogólniono również na postać wielowymiarową, z uwzględnieniem dwóch rodzajów wejść systemu, koncepcję modelowania odwrotnego OBF, wprowadzając dwa odwrotne modele Laguerre’a. Rozszerzono koncepcje modelowania „Offset Deviational” („odchyleniowe ze składową stałą”) na wielowymiarowe modele Laguerre’a oraz odwrotne modele Laguerre’a. Znacząco podniesiono w ten sposób efektywność wielowymiarowych modeli Laguerre’a. I wreszcie wprowadzono wielowymiarowe modele „z całkowaniem” dedykowane dla systemów pracujących na granicy stabilności (a takim jest układ parownika kotła BP-1150). Wszystkie w/w modele estymowano w wersji on-line, z wykorzystaniem estymatorów RLS, ALS i LMS. Modele zaimplementowano w programie MATLAB®/SIMULINK i zastosowano do
31

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego
identyfikacji parownika kotła BP-1150. Na podstawie otrzymanych wyników przeprowadzono analizę efektywności modeli pod kątem identyfikacji wspomnianego obiektu
no, że filtrow
ywano w wyniku symulacji fizykalnego odelu parownika w tych samych warunkach pracy. Otrzymane wyniki potwierdziły
efe lgorytmu.
dentyfikacji systemów dynamicznych o złożonej strukturze w dziedzinie
go” obiektu wielowymiarowego,
. Szczególnie dobre rezultaty otrzymano za pomocą modeli „z całkowaniem”, choć większość pozostałych modeli również uzyskiwała dobre rezultaty (wyjątkiem jest tutaj model Kautza). W ramach pracy wprowadzono pewne modyfikacje dwóch rodzajów filtrów adaptacyjnych (filtra I-go rzędu oraz filtra LMS opartego na modelu FIR) i wykaza
anie/wygładzanie sygnałów posiadających znaczne składowe stochastyczne pozytywnie wpływa na wyniki identyfikacji. Opracowano algorytm umożliwiający identyfikację systemu za pomocą wymienionych wcześniej modeli, z uwzględnieniem podsystemów wchodzących w jego skład oraz topologii połączeń między nimi. Wspomniane wcześniej ograniczenia pomiarowe w systemie parownika wymusiły konieczność identyfikacji na podstawie danych „mieszanych”. Do identyfikacji używano tych sygnałów, które były mierzone w systemie, natomiast sygnały nie dostępne pomiarowo otrzymm
ktywność w/w a
Oryginalny dorobek naukowy rozprawy obejmuje zatem następujące osiągnięcia:
• Opracowanie modelu jednowarstwowego systemu złożonego. • Opracowanie - w oparciu o istniejące algorytmy identyfikacji systemów statycznych -
metodologii iczęstotliwości, zarówno dla systemów Hasiewicza, jak i systemów jednowarstowych.
• W przypadku identyfikacji w dziedzinie czasu: o wprowadzenie wielowymiarowego modelu ARX ze wspólnym mianownikiem, o uogólnienie na postać wielowymiarową modelu Laguerre’a oraz Kautza, o opracowanie koncepcji odwrotnego modelowania OBF dla wielowymiarowych
systemów z dodatkową grupą zakłóceń mierzalnych, o rozszerzenie koncepcji modelu „Offset Deviational” („odchyleniowego ze
składową stałą”) na modele Laguerre’a i odwrotne modele Laguerre’a, o opracowanie modeli „z całkowaniem” przeznaczonych do identyfikacji
systemów znajdujących się na granicy stabilności, o uogólnienie w/w na systemy Hasiewicza oraz jednowarstwowe.
• Wyznaczenie charakterystyk częstotliwościowych podsystemów fizykalnego modelu parownika kotła BP-1150.
• Przeprowadzenie analizy porównawczej rozważanych modeli, pod kątem identyfikacji parownika kotła BP-1150.
• Wyznaczenie efektywnych modeli na bieżąco predykujących wartości wyjść parownika kotła BP-1150, zarówno jako „klasycznejak też systemu o złożonej strukturze.
Wybrane pozycje literaturowe [ALS] Ahlén A., Libdom L., Sternad M., Channel tracking with WLMS algorithms: high performance at LMS
computational load. Signals and Systems, Proc. 2000 IEEE 51st Vehicular Technology Conference, 15-18 May 2000, Tokyo, Japan, pp. 16-20.
[ArF] Arruda L.V.R., Favier G., A review and comparison of robust estimation methods. Proc. 10th IFAC Symp. on Ident. and Sys. Par. Estim., Budapest, pp. 1027-1031.
[AW3] Astrom K.J., Wittenmark B., Adaptive control. Addison-Wesley, New York, 1989.
32

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego [BHN] Bokor, J., Heuberger, P., Ninness, B., Oliveira e Silva, T., Van den Hof, P., Wahlberg, B., Modelling
and identification with orthogonal basis functions. In Proc. Preconference Workshop, 14th IFAC World Congress, Beijing, P.R. China, 1999.
[DeG] Delopoulos A., Giannakis G.B., Consistent identification of stochastic linear systems with noisy input-output data. Automatica, 1994, vol. 30, pp. 1271-1294.
[DTR] Dokumentacja Techniczno-Ruchowa Kotła BP-1150, Raciborska Fabryka Kotłów. RAFAKO.
[Dum] Dumont G.A., From LUST to Brainwave: fifteen years of persistent excitation. In Proc. IFAC Workshop on Adaptive Systems in Control and Signal Processing, Glasgow, Scotland, 1998, pp. 472-479.
[Fre] Fresewinkel T., Hierarchische Identifikation großer Systeme komplexer Struktur mit rekursiven, teilsystemorientierten Parameterschätzverfahren. Fortschr.-Ber. VDI Reihe 8, Nr. 118, Dűsseldorf, 1986.
[FrU] Fresewinkel T., Unbehauen H., On the identification of subsystems of decomposed large scale systems. 7TH IFAC Symposium on Identification and System Parameter Estimation, York, vol. 1, pp. 267-272.
[Gre] Greblicki W., Nonparametric approach to Wiener system identification. IEEE Transactions on Circuits and Systems, 1997, no. 44, pp. 538-545.
[HLT] Hang C.C., Lim K.W., Tay
T.T., On practical implementations of adaptive control. In.: Adaptive and Learning Systems: Theory and Applications. Ed.: K.S. Narendra Plenum Press, New York, 1986.
a2] mory 7-2449.
[Ha
[HHB]
[ILM
[Lan] Lan
[LSM] Lanbiotpp. 2681
[La1] Lat e MIMO sys
[LBT] LatAnn c. of the IFAC World Congress, Beij
[LaH 2-5 September 2002, Szczecin, pp. 411-416.
[LH –2 September 2004, Międzyzdroje, pp. 251-256.
[LRM]
RO] Latawiec K.J., Rojek R., Oliveira G.H.C., Marciak C., Adaptive parameter estimation of OBF models. th dzyzdroje, Poland, 2000, pp. 927-932.
au] Laubli F., Current status of boiler d namics. Sulzer Report, no. 1184, 1973.
[LjG]
nchmark example. Automatica, 1994, vol. 30, pp. 605-613.
H Hasiewicz Z., Applicability of least-squares to the parameter estimation of large-scale no-me[linear composite systems. Int. J. Systems Sci., 1989, vol. 20, no. 12, pp. 242
3] Hasiewicz Z., Identyfikacja sterowanych systemów o złożonej strukturze. Zeszyty naukowe Wydziału Elektroniki Politechniki Wrocławskiej, Seria Monografie, nr 22, WPW 1993. Van den Hof, P.M.J, Heuberger, P.S.C., Bokor, J., System identification with generalized orthonormal basis functions. Automatica, 31, 1995, pp. 1821-1834.
] Isermann R., Lachmann K.-H., Matko D., Adaptive control systems. Prentice-all. New York, 1992. . dau I.D., System Identification and Control Design. Prentice-Hall, Englewood Cliffs, NJ, 1990
dau I.D., Samaan M., M'Saad, M., Robust performance oriented adaptive control for echnological processes - a tutorial. Proc. ACC, 1990, San Diego, CA,
-2687.
awiec K., Contributions to Advanced Control and Estimation for Linear Discrete-Timtems. OW Politechniki Opolskiej, seria: Studia i Monografie, z. 102, 1998. awiec K., Bańka S., Tokarzewski J., Control zeros and nonminimum phase LTI MIMO systems.
Reviews in Control, 2000, vol. 24, pp. 105-112; also in Proual ing, P.R. China, 1999, vol. D, pp. 397-404.
] Latawiec K., Hunek W., Control zeros for continuous-time LTI MIMO systems. Proc. 8th IEEE IC MMAR 2002,
L] Latawiec K., Hunek W., Łukaniszyn M., A new type of control zeros for LTI MIMO systems. Proc. 10th IEEE IC MMAR 2004, 30 AugustLatawiec K.J, Rojek R., Marciak C., Oliveira G.H.C., Adaptive estimation of Laguerre models with time-varying delay. In Proc. 2nd IFAC Workshop on Linear Time Delay Systems, Ancona, Italy, 2000, pp. 163-167.
[LIn Proc. 6 MMAR Conference, Mie
y[L
[Lj1] Ljung L., System Identification. Prentice-Hall, Englewood Cliffs, NJ, 1987.
Ljung L., Gunnarson S., Adaptation and tracking in system identification - a survey. Automatica, 1990, vol. 26, pp. 7-21.
[MiM] Michel A.N., Miller R.K., Qualitative Analysis of Large Scale Dynamical Systems. Mathematic in Science and Engineering, vol. 134, New York, 1977.
[MSH] M'Saad M., Hejda I., Partial state reference model (adaptive) control of a be
33
Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego [NGW] Niness B., Gomez J.C., Weller S., Frequency domain analysis of adaptive tracking algorithms. Proc.
11th IFAC Symp. on System Identification (SYSID’97), Kitakyushu, Japan, 1997, vol. 4, pp. 1747-1752.
[RaM] Rao C.R., Mitra S.K., Generalised Inverse of Matrices and its Applications. John Wiley & Sons, New York, 1971.
[RPS] Rivera D.E., Pollard J.F., Sterman L.E., Garcia C.E., An industrial perspective on control-relevant
[SMS] 61.
[SK4] .T.M., Kailath T., Numerically stable fast transversal filters for recursive least squares adaptive
[SoS]
4, WPO 2001.
ark
Dorob
ethods and Models in
[LMH] systems. Proc. the 7 World Multi-Conference on
[LM1] lation experiments using
[LM2] principle in
ch systemów o złożonej PO 2003,str. 49-67. terowania w warunkach
), nr 1-2’2003.
j strukturze. Materiały konferencyjne XIV Krajowej Konferencji Automatyki, Zielona Góra 2002, str.383-388.
identification. Proc. ACC, 1990, San Diego, CA, pp. 2406-2411.
Shook D.S., Mohtadi C., Shah S.L., Adaptive filtering and GPC. Proc. ACC, 1990, San Diego, CA, pp. 556-5
[SK3] Slock D.T.M., Kailath T., Fast transversal filters with data sequence weighting. IEEE Trans. on ASSP, 1989, vol. 37, pp. 346-352. Slock Dfiltering. IEEE Trans. on SP, 1991, vol. 39, pp. 92-114. Söderström T., Stoica P., Identyfikacja Systemów. PWN, 1997.
[St5] Stanisławski W., Modelowanie i symulacja komputerowa parowników przepływowych kotłów energetycznych. Studia i Monografie z.12
[SLA] Sternad M., Libdom L., Ahlén A., Wiener design of adaptation algorithms with time-invariant gains. IEEE trans. of Signal Processing, vol. 50, no. 8, 2002, pp. 1895-1907.
[Tok] Tokarzewski J., Zeros in Linear Systems: a Geometric Approach. Warsaw University of Technology Press, Warszawa, 2002.
[WaM] Wahlberg B., Mäkilä P.M., On approximation of stable linear dynamical systems using Laguerre and Kautz functions. Automatica, 32, 1996 pp. 693-708.
[WK1] Widrow B., Kamenetsky M., Statistical efficiency of adaptive algorithms. Neural Network, no. 16, 2003, pp. 735-744.
[YoC] Yoon T.-W., Clarke D.W., Adaptive predictive control of the benchmplant. Automatica, 1994, vol. 30, pp. 621-624.
ek publikacyjny autora
[LHS] Latawiec K., Hunek W., Stanisławski R., Łukaniszyn M., Control zeros versus transmission zeros intriguingly revisited. Proc. of 9th IEEE International Conference on MAutomation and Robotics (MMAR 2004), 25-28 August 2003, Miedzyzdroje, Poland, pp 449-454.
Latawiec K.J., Marciak C., Hunek W., Stanisławski R., A new analytical design methodology for adaptive control of nonlinear block-oriented th
Systemics, Cybernetics and Informatics, Orlando, Florida, USA, 2003, XI, 215-220.
Latawiec K., Marciak C., Stanisławski R., Hunek W., Adaptive noise cancelLaguerre filters. In Proc. XXVII IC SPETO, Niedzica, 26-29 May 2004, vol. 2, pp. 453-456.
Latawiec K., Marciak C., Stanisławski R., Oliveira, G.H.C., The mode separabilitythmodeling of linear and nonlinear block-oriented systems. Proc. of 10 IEEE International Conference
on Methods and Models in Automation and Robotics (MMAR 2004), 30 August – 2 September 2004, Miedzyzdroje, Poland, pp. 479-484.
[St1] Stanisławski R., Identyfikacja charakterystyk częstotliwościowych obiektów sterowania o złożonej strukturze. Chemia Dydaktyka Ekologia Metrologia (CDEM-2001), nr 1-2’2001, str. 47-53.
[St2] Stanisławski R., Algorytmy estymacji charakterystyk częstotliwościowystrukturze. Zeszyty Naukowe Politechniki Opolskiej, Seria Elektryka z. 52, W
] Stanisławski R., Częstotliwościowa identyfikacja złożonych obiektów s[St3deterministycznych. Zeszyty Naukowe Politechniki Opolskiej, Seria Elektryka z. 52, WPO 2003, str. 153-167.
[St4] Stanisławski R., Parametryczna identyfikacja dynamicznych systemów szeregowo równoległych. Chemia Dydaktyka Ekologia Metrologia (CDEM-2003
[SL1] Stanisławski R., Latawiec K., Dwustopniowy algorytm identyfikacji charakterystyk częstotliwościowych systemów o złożone
34

Rafał Stanisławski, Identyfikacja systemów dynamicznych o złożonej strukturze na przykładzie obiektu energetycznego [SL2] Stanisławski R., Latawiec K., New algorithms for frequency response identification of complex
structure systems. Proc. of 8th IEEE International Conference on Methods and Models in Automation and Robotics (MMAR 2002), 2-5 September 2002, Szczecin, Poland, pp 501-506.
em Funkcji bazy ortonormalnej. Zeszyty Naukowe Politechniki Opolskiej, Seria Elektryka
[StZ] tryzacji w układzie z wirującą tarczą.
[ZmS] ., Stanisławski R., Analiza stanów przejściowych elektryzacji statycznej w układzie z
[ZyS] aliza metod kompresji sygnału EKG. Materiały IV Sympozjum
[SML] Stanisławski R., Marciak C., Latawiec K., Hunek W., Adaptacyjne tłumienie zakłóceń z wykorzystaniz.54, WPO 2004, str. 133-147.
Stanisławski R., Zmarzły D., Analiza dynamiki zmian prądu elekPrzegląd Elektrotechniczny (Materiały WZEE’2002), nr 5s’2002, str.210-213.
Zmarzły Dwirującą tarczą. Zastosowania Komputerów w Elektrotechnice, Poznań/Kiekrz 2002, str.215-218.
Zygarlicki J., Stanisławski R., AnModelowanie i Pomiary w Medycynie (MPM’04), 9-13 maja 2004, Krynica, str. 99-102.
35