Geometria rózniczkowa• - Urząd Miasta...
121
Geometria r • zniczkowa Jan Kubarski Instytut Matematyki Politechniki dzkiej June 3, 2012 1 Przestrze·nkartezja·nska R n oraz jej struktury wa • zne w elementarnej geometrii r• zniczkowej Na ogstruktury w R 2 i R 3 (wyst epuj ace dalej w elementarnej geometrii r• zniczkowej krzywych i powierzchni) daj a si e okre·sli·c jako szczeglne przypadki odpowiednich struktur w R n : 1.1 Metryka kartezja·nska i iloczyn skalarny W geometrii (analitycznej i r• zniczkowej) w R n rozwa• zamy tzw. metryk e kartez- ja·nsk a okre·slona wzorem Pitagorasa n : R n R n ! R + ; n (x; y) = v u u t n X i=1 (x i y i ) 2 ; x =(x 1 ;:::;x n ); y =(y 1 ;:::;y n ): Norm a punktu x 2 R n nazywamy liczb e kxk rwn a odleg o·sci x od wektora zerowego (oznaczanego te• z przez 0) kxk = n (; x)= v u u t n X i=1 x 2 i : Oczywi·scie jjx yjj = n (x; y) : Odleg o·s·c n (x; y) i norma kxk speniaznane aksjomaty metryki i normy (znane z analizy): (M1) n (x; y) = n (y;x) [symetria], (M2) n (x; y) 0 i n (x; y)=0 () x = y; (M3) n (x; z) n (x; y)= n (y;z) [nier.trjk ata] (N1) kxk 0 i kxk = wtedy i tylko wtedy, gdy x =; (N2) kt xk = jtjkxk; t 2 R; (N3) kx + yk kxk + kyk: 1
Transcript of Geometria rózniczkowa• - Urząd Miasta...

Geometria ró·zniczkowa
Jan KubarskiInstytut Matematyki Politechniki ×ódzkiej
June 3, 2012
1 Przestrzen kartezjanska Rn oraz jej strukturywa·zne w elementarnej geometrii ró·zniczkowej
Na ogó÷struktury w R2 i R3 (wyst¾epuj ¾ace dalej w elementarnej geometriiró·zniczkowej krzywych i powierzchni) daj ¾a si¾e okreslic jako szczególne przypadkiodpowiednich struktur w Rn:
1.1 Metryka kartezjanska i iloczyn skalarny
W geometrii (analitycznej i ró·zniczkowej) w Rn rozwa·zamy tzw. metryk¾e kartez-jansk ¾a okreslona wzorem Pitagorasa
�n : Rn � Rn �! R+;
�n(x; y) =
vuut nXi=1
(xi � yi)2; x = (x1; : : : ; xn); y = (y1; : : : ; yn):
Norm ¾a punktu x 2 Rn nazywamy liczb¾e kxk równ ¾a odleg÷osci x od wektorazerowego � (oznaczanego te·z przez 0)
kxk = �n (�; x) =
vuut nXi=1
x2i :
Oczywiscie jjx� yjj = �n (x; y) : Odleg÷osc �n(x; y) i norma kxk spe÷nia znaneaksjomaty metryki i normy (znane z analizy):
(M1) �n (x; y) = �n (y; x) [symetria],
(M2) �n (x; y) � 0 i �n (x; y) = 0() x = y;
(M3) �n (x; z) � �n (x; y) = �n (y; z) [nier.trójk ¾ata]
(N1) kxk � 0 i kxk = � wtedy i tylko wtedy, gdy x =;
(N2) kt � xk = jtj � kxk; t 2 R;(N3) kx+ yk � kxk+ kyk:
1

De�nition 1 Standardowym iloczynem skalarnym w Rn nazywamy funkcj ¾e
� : Rn � Rn �! R
zde�niowan ¾a wzorem: (x1; : : : ; xn) � (y1; : : : ; yn) =Pn
i=1 xi � yi:
Oczywiscie
x � x = kxk2;kxk =
px � x:
Standardowy iloczyn skalarny ona w÷asnosci (÷atwe do pokazania)
Theorem 2 W÷asnosci iloczynu skalarnego:
(1) symetria:x � y = y � x dla dowolnych x; y 2 Rn;
(2) liniowosc ze wzgl ¾edu na ka·zd ¾a zmienn ¾a (czyli R-dwuliniowosc):
(r � x+ s � y) � z = r � (x � z) + s � (y � z) ;x � (r � y + s � z) = r � (x � y) + s � (x � z) ;
dla dowolnych x; y; z 2 Rn, r; s 2 R;
(3) nieujemnosc:
x � x � 0 dla wszystkich x 2 Rn;
(4) niezdegenerowanie: dla dowolnego x 2 Rn
x � x = 0, x = �:
Remark 3 W dowolnej przestrzeni wektorowej rzeczywistej V przez (abstrak-cyjny) iloczyn skalarny rozumiemy dowolne odwzorowanie dwuliniowe � : V �V ! R spe÷niaj ¾ace powy·zsze 4 warunki (1)-(4). W dowolnym abstrakcyjnymprzypadku cz ¾esciej iloczyn skalarny x � y oznacza si ¾e przez hx; yi : Pokazujesi ¾e [CWICZENIE] (korzystaj ¾ac z ortogonalizacji Gramma-Schmidta) ·ze je·zelih�; �i : V � V ! R jest iloczynem skalarnym i dimV = n to istnieje taka bazav1; :::; vn przestrzeni V dla której hvi; vji = �ij (tzw. baza ortogonalna). Wynikast ¾ad ·ze liniowy izomor�zm f : Rn ! V; f (x1; :::; xn) = �ixi � vi zachowujeiloczyn skalarny hf (x) ; f (y)i = x � y; tzn. je·zeli v = �ixi � vi i w = �iyi � vito hv; wi = �ixi � yi (jest to banalne cwiczenie). Pokazuje to, ·ze w przestrzeniskonczenie wymiarowej uogólnienie klasycznego iloczynu skalarnego na dowolnyabstrakcyjny iloczyn skalarny nie jest istotne.Jako przyk÷adowa literatura do powy·zszego twierdzenia:� Michael Spivak, Analiza na rozmaitosciach. Nowoczesne podejscie. PWN,
2005.
2

Remark 4 W przestrzeniach funkcyjnych (nieskonczenie wymiarowych) iloczynyskalarne cz ¾esto okreslone s ¾a ca÷kami: Niech C b ¾edzie przestrzeni ¾a wektorow ¾awszystkich funkcji rzeczywistych ci ¾ag÷ych na przedziale [0; 1]. Odwzorowanie
h�; �i : C � C �! R; hf; gi =1Z0
f (t) g (t) dt
jest iloczynem skalarnym w C. Ma to podstawowe znaczenie w teorii przestrzeniHilberta.
Z analizy znana jest nierównosc C-S:
Theorem 5 (Nierównosc Cauchy�ego-Schwarza) Dla x; y 2 Rn zachodzinierównosc
jx � yj � kxk � kyk:
W dowodzie [CWICZENIE] wykorzystuje si¾e wyró·znik niedodatni trójmianukwadratowego (t � x+ y) � (t � x+ y) � 0: Równosc ma miejsce wtedy i tylkowtedy gdy wektory x i y s ¾a równoleg÷e, czyli gdy jeden z nich jest iloczynemdrugiego przez sta÷¾a (gdy x 6= � to istnieje t taka, ·ze y = tx) [Cwiczenie].
De�nition 6 Dla niezerowych wektorów x; y 2 E z nierównosci Cauchy�ego-Schwarza wynika, ·ze
�1 � x � ykxk � kyk � 1:
Zatem istnieje dok÷adnie jedna liczba rzeczywista � = ] (x; y) 2 [0;�], ·ze
cos� =x � ykxk � kyk :
Liczb ¾e t ¾e nazywamy k ¾atem (lub bardziej precyzyjniej miar ¾a k ¾ata) mi ¾edzy wek-torami x i y.Wektory niezerowe x, y nazywamy prostopad÷ymi (ortogonalnymi) je·zeli � =
] (x; y) = �2 czyli gdy cos� = 0 co jest równowa·zne z zerowaniem si ¾e iloczynu
skalarnego x�y = 0: Gdy jeden z wektorów x lub y jest zerowy to tak·ze x�y = 0i w zwi ¾azku z tym uznajemy na mocy de�nicji, ·ze wektor zerowy jest prostopad÷ydo ka·zdego wektora. Fakt prostopad÷osci wektorów x; y oznaczamy
x?y:
Remark 7 Niech x b ¾edzie niezerowym wektorem przestrzeni wektorowej E ziloczynem skalarnym h�; �i oraz y = tx dla pewnego t 2 R n f0g. Wektory x; ys ¾a równoleg÷e, sk ¾ad k ¾at mi ¾edzy nimi jest 0 lub �: Dok÷adniej: kosinus k ¾ata �
mi ¾edzy wektorami x i y równa si ¾e cos� =t
jtj = sign (t), sk ¾ad wynika, ·ze � = 0je·zeli t > 0 oraz � = � je·zeli t < 0.
3

Theorem 8 (Twierdzenie Pitagorasa) Dla dowolnych ortogonalnych wektorówx; y 2 Rn zachodzi równosc
kx+ yk2 = kxk2 + kyk2:
Proof. Niech x; y 2 Rn oraz x � y = 0. Wówczas
kx+ yk2 = (x+ y) � (x+ y)= x � x+ x � y + y � x+ y � y= x � x+ y � y= kxk2 + kyk2:
Wprost z w÷asnosci iloczynu skalarnego w Rn i normy wynika tzw. Twierdzeniakosinusów b¾ed ¾ace uogólnieniem twierdzenia Pitagorasa.
Theorem 9 (Twierdzenie kosinusów) (Uogónienie twierdzenia Pitagorasa)Dla dowolnych niezerowych wektorów x; y w Rn zachodzi równosc
jjx� yjj2 = jjxjj2 + jjyjj2 � 2kxk � kyk � cos�;
gdzie � 2 [0;�] jest miar ¾a k ¾ata wektorów x; y.
Proof. Wezmy dowolne x; y 2 Rnnf�g. Z w÷asnosci normy i iloczynu skalarnegooraz de�nicji miary k ¾ata niezerowych wektorów wynika, ·ze
jjx� yjj2 = (x� y) � (x� y)= x � x+ y � y � 2 � (x � y)= jjxjj2 + jjyjj2 � 2kxk � kyk � cos�:
Exercise 10 (O ortogonalnym rozk÷adzie) Niech u; v 2 Rn oraz v 6= �. Wów-czas istniej ¾a taki skalar t 2 R oraz wektor w 2 Rn, ·ze
u = tv + w oraz v � w = 0.
������
������
������
r0
u
rtvCCCCCCCCC
�������������
r
rv
w
Rys. 1
4

(t =v � ujjvjj 2 R oraz w = u� v � u
jjvjj v 2 Rn)
Corollary 11 Z powy·zszego cwiczenia i jego dowodu wynika, ·ze jesli u 2 Rnoraz v 2 Rn n f�g, to istnieje wektor w 2 Rn ortogonalny do v, dla którego
u =v � ujjvjj v + w:
Exercise 12 Udowodnic nierównosc C-S w oparciu o powy·zsze zadanie i Tw.Pitagorasa.
Exercise 13 Pokazac warunek równowa·zny z równosci ¾a jx � yj � kxk � kyk woparciu o cwiczenie o ortogonalnym rozk÷adzie (z dowodu zauwa·zyc, ·ze ma tomiejsce gddy wektor w = �).
Exercise 14 Korzystaj ¾ac z nierównosci Cauchy�ego-Schwarza wykazac tzw. nierównosctrójk ¾ata kx + yk � kxk + kyk oraz znalezc warunek konieczny i dostateczny nato aby w nierównosci trójk ¾ata zachodzi÷a równosc?
Exercise 15 Pokazac, z w÷asnosci normy (N3) nierównosc trójk ¾ata dla me-tryki.
Wiemy z geometrii analitycznej, ·ze je·zeli odwzorowanie f : Rk ! Rn jestizometri ¾a (zachowuje odleg÷osc), to na wektorach swobodnych zachowuje iloczynskalarny. Jesli wi¾ec f (0) = 0 to f zachowuje iloczyn skalarny. Odwrotnie jest÷atwiej pokazac: je·zeli f : Rk ! Rn zachowuje iloczyn skalarny to f (0) = 0 i fjest izometri ¾a czyli zachowuje odleg÷osc:a) niech f (0) = a; wtedy a�a = f (0)�f (0) = 0�0 = 0 z niezdegenerowania
il. skalarnego a = 0:b) niech a; b 2 Rk: Rownosc � (a; b) = � (f (a) ; f (b)) jest równowa·zna kb� ak2 =
kf (b)� f (a)k2 czyli (b� a) � (b� a) = (f (b)� f (a)) � (f (b)� f (a)) którawynika z dwuliniowosci iloczynu skalarnego i zachowywania il. skalarnego przezf:
1.2 Orientacja i iloczyn wektorowy
1.2.1 Orientacja
Dla lepszej widocznosci przymijmy nast¾epuj ¾ace oznaczenia zmiennychx; y; z; :::a ; b �wektory z przestrzeni Rn;e1; :::; en; �baza wersorów osi wspó÷rz¾ednych, e1 = (1; 0; :::), e2 = (0; 1; 0; :::),
en = (:::; 0; 1).a1; :::; an i b1; :::; bn �dowolne bazy uporz ¾adkowane wektorów w Rn:
De�nition 16 Dwie uporz ¾adkowane bazy f = (a1; :::; an) i g = (b1; :::; bn)dowolnej n-wymiarowej przestrzeni wektorowej nazywamy zgodnie zorientowanymi,je·zeli macierz przejscia z jednej bazy do drugiej ma wyznacznik dodatni. Tzn.gdy bi =
Pj xijaj dla xij 2 R to bazy s ¾a zgodnie zorientowane gdy det [xij ] > 0:
W przeciwnym wypadku bazy te nazywamy przeciwnie zorientowanymi.
5

Oznaczmy relacj¾e zgodnego zorientowania przez f � g. Z podstawowychw÷asnosci wyznaczników macierzy wynia, ·ze relacja� jest relacj ¾a równowa·znosci:
1. f � g
2. f � g ) g � f
3. f � g ^ g � h) f � h.
Relacja rozbija rodzin¾e wszystkich baz tej przestrzeni na klasy abstrakcji.Poniewa·z wyznacznik macierzy nieosobliwej mo·ze byc tylko dodatni lub ujemnyto istniej ¾a dwie takie klasy i nazywane s ¾a orientacjami tej przestrzeni. PrzestrzenRn wraz z wybran ¾a orientacj ¾a nazywamy przestrzeni ¾a kartezjansk ¾a n-wym zori-entowan ¾a. Dowolna baza f wyznacza orientacj¾e [f ] - klas¾e abstrakcji zawieraj ¾ac ¾af:Wprzestrzeni Rn istnieje naturalna uporz ¾adkowana baza wersorów osi wspó÷rz¾ed-
nych (e1; :::; en). Dla przestrzeni kartezjanskiej Rn za dodatni ¾a orientacj ¾e uzna-jemy wyznaczon ¾a przez wersory osi wspó÷rz¾ednych w normalnej kolejnosci
(e1; :::; en) :
Je·zeli bi = [bi1; :::; bjn] 2 Rn to bi =P
j bijej ; zatem baza (b1; :::; bn) z÷o·zona zwektorów bi = [bi1; :::; bjn] ; jest dodatnia gdy wyznacznik macierzy wspó÷rz¾ed-nych tych wektorów jest dodatni�������
b11 � � � b1n...
...bn1 � � � bnn
������� > 0:Przestawienie dwu wektorów w danej bazie zmienia orientacj¾e przestrzeni.
Tak·ze, zmiana jednego z wektorów bazy na przeciwny zmienia orientacj¾e przestrzeni.(Cwiczenie: Zobaczyc to dla n = 2 i n = 3 ).
1.2.2 Iloczyn wektorowy w R3
Iloczyn wektorowy wektorów opiszemy najpierw w przestrzeni R3: Potem krótkow Rn: Dla n = 2 b¾edzie to po·zyteczne w teorii krzywych p÷askich. Iloczynwektorowy w 3 b¾edzie to iloczyn dwu wektorów i w wyniku jest równie·z wektor.Iloczyn wektorowy wektorów a i b zapisujemy symbolem
a� b:
De�nition 17 Iloczynem wektorowym wektorów a = [a1; a2; a3] ; b = [b1; b2; b3]w przestrzeni kartezjanskiej R3 nazywamy wektor oznaczany symbolem a� bspe÷niaj ¾acy warunki
Proposition 18 W÷asnosci iloczynu wektorowego wektorów:
(1) a ? a� b; b ? a� b;
6

(2) d÷ugosc wektora jja� bjj jest równa polu równoleg÷oboku rozpi ¾etego na wek-torach a i b; (w szczególnosci a� b = 0 gdy wektory a i b s ¾a liniowo-zale·zne),
(3) jesli wektory a; b s ¾a liniowo-niezale·zne to trójka wektorów (a; b; a� b) jestbaz ¾a dodatni ¾a w R3:
Warunki (1)-(3) wyznaczaj ¾a wektor a� b jednoznacznie.
Theorem 19 Dla dowolnych wektorów a i b zachodzi równosc
a� b =
������e1 e2 e3a1 a2 a3b1 b2 b3
������ ; (1)
(rozwijamy wyznacznik formalnie wed÷ug pierwszego wiersza), inaczej
a� b = e1 ����� a2 a3b2 b3
����� e2 � ���� a1 a3b1 b3
����+ e3 � ���� a1 a2b1 b2
���� (2)
=
����� a2 a3b2 b3
���� ;� ���� a1 a3b1 b3
���� ; ���� a1 a2b1 b2
����� :Proof. Poka·zemy, ·ze wektor z prawej strony równosci (1)
c :=
������e1 e2 e3a1 a2 a3b1 b2 b3
������spe÷nia warunki (1)-(3) z de�nicji iloczynu wektorowego.(1): a ? c; b ? c;
a � c = a1 ����� a2 a3b2 b3
����� a2 � ���� a1 a3b1 b3
����+ a3 � ���� a1 a2b1 b2
����=
������a1 a2 a3a1 a2 a3b1 b2 b3
������ = 0analogicznie b � c = 0; tzn. a i b s ¾a prostopad÷e do c:(2) Jesli jeden z wektorów a lub b jest zerowy to teza zachodzi, bo c = 0
i pole równoleg÷oboku jest tek·ze 0: Za÷ó·zmy teraz, ze oba wektory a i b s ¾aniezerowe. Oznaczmy wyznaczniki (wspó÷rz¾edne wektora c )
c1 =
���� a2 a3b2 b3
���� ; c2 = ����� a1 a3b1 b3
���� ; c3 =
���� a1 a2b1 b2
���� :
7

jjcjj2 = c21 + c22 + c
23
=
���� a2 a3b2 b3
����2 + ���� a1 a3b1 b3
����2 + ���� a1 a2b1 b2
����2= (a2b3 � a3b2)2 + (a1b3 � a3b1)2 + (a1b2 � a2b1)2
=�a21 + a
22 + a
23
� �b21 + b
22 + b
23
�� (a1b1 + a2b2 + a3b3)2
= a2 � b2 � (a � b)2
= a2 � b2 1� (a � b)
2
a2 � b2
!= a2 � b2
�1� cos2 ] (a; b)
�= a2 � b2 sin2 ] (a; b) =
�jjajj2 � jjbjj2 sin2 ] (a; b)
�= (jjajj � jjbjj � sin] (a; b))2
równa si¾e kwadratowi pola równoleg÷oboku rozpi¾etego na wektorach a i b:(3): uk÷ad (a; b; c) jest dodatni (gdy a i b s ¾a liniowo-niezale·zne). W tym
celu wystarcza obliczyc wyznacznik macierzy wspó÷czynników (rozwijamy w/gtrzeciego wiersza) ������
a1 a2 a3b1 b2 b3c1 c2 c3
������= c1 �
���� a2 a3b2 b3
����� c2 � ���� a1 a3b1 b3
����+ c3 � ���� a1 a2b1 b2
����= c21 + c
22 + c
23 > 0:
Z dowodu widzimy (k÷ad ¾ac c = a� b ), ·ze
jja� bjj2 = a2 � b2 � (a � b)2 :
Theorem 20 W÷asnosci iloczynu wektorowego
(1) skosna symetriaa� b = �b� a;
(2) dwuliniowosc
a� (r � b+ s � c) = r � (a� b) + s � (a� c) ;(r � a+ s � b)�c = r � (a� c) + s � (b� c) ;
(3) to·zsamosc Jacobiego
a� (b� c) + b� (c� a) + c� (a� b) = 0
(zatem R3 z iloczynem wektorowym tworzy tzw. algebr¾e Liego),
8

(4) ilooczyn mieszany i jego wartosc (iloczyn mieszany trzech wektorów a; b; cto z def. liczba (a; b; c) := (a� b) � c )
([a1; a2; a3]� [b1; b2; b3]) � [c1; c2; c3] =
������a1 a2 a3b1 b2 b3c1 c2 c3
������ ;w konsekwencji iloczyn mieszany (a; b; c) jako funkcja trzech wektorów jestskosnie symetryczna, w szczególnosci
(a� b) � c =(a; b; c) = � (a; c; b) = � (a� c) � b:
(5) (a1 � a2)� b = a2 � (a1 � b)� a1 � (a2 � b) :
(6) (a1 � a2) � (a3 � a4) = (a1 � a3) � (a2 � a4)� (a1 � a4) � (a2 � a3) ;
(7) jesli i, j, k oznaczaj ¾a wersory osi wspó÷rz ¾ednych to w ci ¾agu i; j;k; i; j;k; :::iloczyn wektorowy dwu s ¾asiednich wektorów jest wektorem nast ¾epnym wtym ci ¾agu, tzn.
i� j = k; j� k = i; k� i = j; itd.
Proof. Cwiczenie samodzielne.
Lemma 21 Jesli a i b s ¾a niezerowe i prostopad÷e do siebie, to w ci ¾agu
a; b; a� b; a; b; :::
iloczyn wektorowy dwu s ¾asiednich wektorowów jest równy wektorowi nast ¾epnemuz dok÷adnosci ¾a do dodatniego czynnika.
Proof. Np.
(a� b)� a(5)= (a � a) � b�
0@b � a|{z}=0
1A � a = jjajj2 � b:Dla b� (a� b) zrobic samemu.
1.2.3 Iloczyn wektorowy w Rn
De�nition 22 Iloczyn wektorowy uk÷adu wektorów (a1; :::;an�1) w Rn (n � 2)jest to wektor a1 � :::� an�1 2 Rn taki, ·ze
(a) a1 � :::� an�1? ai;
(b) ka1 � :::� an�1k jest równa obj ¾etosci równoleg÷oscianu rozpi ¾etego na wek-torach a1; :::;an�1; (w szczególnosci a1 � ::: � an�1 = 0 gddy wektorya1; :::;an�1 s ¾a liniowo zale·zne),
9

(c) uk÷ad wektorów (a1; :::;an�1;a1 � :::� an�1) jest dodatnio zorientowany(gdy a1; :::;an�1 s ¾a liniowo niezale·zne).
Warunki te okreslaj ¾a wektor jednoznacznie.
Remark 23 (1) gdy n = 2 dostajemy operacj ¾e która jednemu wektorowi aprzypisuje wektor a� taki, ·ze a� = 0 gddy a = 0 a gdy a 6= 0 to wektor a�? azas para wektorów (a;a�) jest dodatnio zorientowana oraz kak = ka�k. Oper-acja ta jest fundamentalna w geometrii ró·zniczkowej krzywych p÷askich. Geom-etrycznie, wektor a� powstaje przez obrót wektora a o 900 przeciw wskazówkomzegara.(2) gdy n = 3 dostajemy znan ¾a powy·zej operacj ¾e iloczynu wektorowego a1�a2
dwu wektorów.
Obj¾etosc równoleg÷oscianu rozpi¾etego na k wektorach w Rn opisuje poni·zszetwierdzenie
Theorem 24 Niech a1 = [a1;1; :::; a1;n] ; :::; ak = [ak;1; ::; ak;n] b ¾ed ¾a liniowo-niezale·znymi wektorami w Rn:Wtedy obj ¾etosc k-wymiarowa równoleg÷oboku rozpi ¾etegona wektorach a1; :::;ak jest równavuuut X
i1<:::<ik
������a1;i1 ::: a1;ik:::: :::
ak;i1 ::: ak;ik
������2
:
(Wzór ten uogólnia przypadek dwu wektorów w R3).
Exercise. Cwiczenie teoretyczne�: udowodnic ten wzór induk-cyjnie. Przy pomocy ca÷ek powierzchniowych dowód jest bardzo ÷atwy (Cwicze-nie).Podamy teraz wzór obliczaj ¾acy iloczyn wektorowy w terminach wspó÷rz¾ed-
nych.
Theorem 25 Niech ai = [a1i ; :::; ani ] 2 Rn: Wówczas
a1 � :::� an�1 = det
26664e1 e2 � � � ena11 a21 an1...
......
a1n�1 a2n�1 � � � ann�1
37775rozwijaj ¾ac wyznacznik w/g pierwszego wiersza, gdzie e1; :::; en sa wersorami osiwspó÷rz ¾ednych.
Proof. Trzeba si¾e upewnic o s÷usznosci trzech w÷asnosci prawej strony powy·zszegowzoru, okreslaj ¾acych iloczyn wektorowy. (a) a1 � ::: � an�1? ai: Otó·z iloczynskalarny ai�(a1 � :::� an�1) jest akurat równy wyznacznikowi (dlaczego?) takiemujak wy·zej po wstawieniu w miejsce wersorów wiersza ai = [a1i ; :::; a
ni ]: Oczywiscie
wyznacznik ten jest równy zeru (dwa wiersze jednakowe).
10

(c) Po napisaniu wyznacznika wspó÷rz¾ednych wektorów (a1; :::;an�1;a1 � :::� an�1)26664a11 a21 an1...
......
a1n�1 a2n�1 � � � ann�1(a1 � :::� an�1)1 (a1 � :::� an�1)2 � � � (a1 � :::� an�1)n
37775i rozwini¾eciu w/g ostatniego wiersza widzimy (pokazac), ·ze jest równy
ka1 � :::� an�1k2 =Xi
(a1 � :::� an�1)i � (a1 � :::� an�1)i > 0:
Pozostaje porównac d÷ugosc ka1 � :::� an�1k z obj¾etosci ¾a równoleg÷oscianu rozpi¾etegona wektorach a1; :::;an�1 : patrz Tw. poprzednie.UWAGA: W÷asnosci odwzorowania
� : Rn � ::::� Rn| {z }n�1 czyników
! Rn; (a1; :::;an�1) 7! a1 � :::� an�1
jest to odwzorowanie n� 1-liniowe skosnie symetryczne.Innym wa·znym przyk÷adem odwzorowania skosnie symetrycznego jest wyz-
nacznik jako funkcja wierszy:
Rn � ::::� Rn| {z }n czyników
! R; (v1; :::;vn) 7! det [vi;j ] :
2 ×uki (drogi, przebiegi) w Rn
2.1 D÷ugosc ÷uku
De�nition 26 Krzyw ¾a sparametryzowan ¾a (drog ¾a, ÷ukiem) w Rn nazywamy ci ¾ag÷eodwzorowanie c : I ! Rn, I = [a; b] ; a < b; (okreslone na przedziale domkni ¾e-tym). Gdy dziedzina odwzorowania jest przedzia÷em otwartym to cz ¾esto nazy-wane jest ono w elementarnej geometrii ró·zniczkowej przebiegiem i oznaczaneraczej bywa liter ¾a p
p : (a; b)! Rn; �1 � a < b � +1:
Obraz L drogi c (przebiegu p) nazywa si ¾e jej sladem (a cz ¾esto po prostu krótkokrzyw ¾a). Punkty c (a) i c (b) nazywamy koncami ÷uku c. ×uk c (t) ; t 2 [a; b] ;nazywany jest te·z parametryzacja krzywej L: Argumenty (elementy dziedziny)t 2 I ÷uku (przebiegu) c; nazywamy miejscami. Przebieg jest klasy Ck gdywspó÷rz ¾edne s ¾a klasy Ck; przy czym klasa Ck na przedziale domkni ¾etym oznacza,·ze mo·zna go rozszerzyc na nieco wi ¾ekszy przedzia÷otwarty do przebiegu klasy Ck:
W tym paragra�e rozwa·zamy ÷uki okreslone na przedzia÷ach domkni¾etych,de�niujemy jego d÷ugosc, charakteryzujemy drogi posiadaj ¾ace d÷ugosc i obliczamy
11

d÷ugosc w przypadku drogi ró·zniczkowalnej. Za÷o·zenie domkni¾etosci dziedzinyjest tu potrzebne.Tak okreslone pojecie ÷uku jest dosc ogólne. Zawiera np. ÷uki sta÷e c (t) =
(xo; yo; zo) ; ÷uki posiadajace samoprzeciecia, ÷uki mogace przebiegac krzywa Lwielokrotnie. Istnieja te·z p÷askie ÷uki ciag÷e nigdzie nieró·zniczkowalne którewype÷niaja ca÷y kwadrat (tzw. krzywa Peano). W niektórych dalszych za-gadnieniach takie zjawiska beda niepo·zadane, konieczne beda wtedy dodatkoweza÷o·zenia o ÷ukach które je wyeliminuja.
Example 27 Prostymi przyk÷adami ÷uków (przebiegów) sa:
(a) Prosta. Parametryzacja prostej L w Rn przechodzacej �dla parametru t0�przez punkt (x10; x20; :::; xn0) i równoleg÷ej do wektora v = [v1; v2; :::; vn] :
c (t) = (x10; x20; :::; xn0) + (t� t0) � v; t 2 R;
tzn. 8><>:x1 (t) = x10 + t � v1...
......
xn (t) = xn0 + t � vn
(b) Okr ¾ag w R2: Parametryzacja okregu x2 + y2 = 1
c : R �! R2; c (t) = (cos (t) ; sin (t)) :
×uk ten przebiega okrag nieskonczenie wiele razy; ka·zdy przedzia÷para-metrów o d÷ugosci 2� odwzorowuje sie na ca÷y okrag.
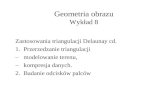
(c) Cykloidac (t) = (t� sin (t) ; 1� cos (t)) ; t 2 R:
0 2 4 6 8 10 12 140
1
2
x
y
Krzywa która opisuje ten ÷uk jest torem punktu na okregu toczacego sie poprostej. Widzimy na rysunku, ·ze w miejscach t = 2k� wystepuja ostrza.Pochodna w tych miejscach
c0 (2k�) = [1� cos (2k�) ;� cos (2k�)] = [0; 0]
jest wektorem zerowym.
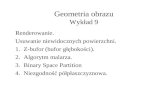
(d) Slimak Pascala
c (t) =�2 cos2 (t) + cos (t) ; 2 sin (t) cos (t) + sin (t)
�; t 2 [0; 2�] :
12

1 2 3
1.51.00.50.00.51.01.5
x
y
×uk ten posiada samoprzeciecia w punkcie (0; 0) odpowiadajace para-metrom 2
3� oraz43�:
� patrz Ksi ¾a·zka Eugeniusz Niczyporowicz, Krzywe p÷askie, wybrane zagad-nienia z geometrii analitycznej i ró·zniczkowej, PWN, 1991.
Przypomnijmy norm¾e Euklidesow ¾a wektora v = [v1; :::; vn]2Rn; kvk =qPn
i=1 (vi)2:
De�nition 28 D÷ugosci ¾a ÷uku c : [a; b] �! Rn, c (t) = (x1 (t) ; x2 (t) ; : : : ; xn (t)),nazywamy liczb ¾e
L (c) = supa=t0<:::<tm=b
m2N
mXi=1
q[x1 (ti)� x1 (ti�1)]2 + :::+ [xn (ti)� xn (ti�1)]2
= supa=t0<:::<tm=b
m2N
mXi=1
kc (ti)� c (ti�1)k :
Geometrycznie oznacza to d÷ugosc ÷amanej wpisanej w wykres ÷uku, tzn. ÷amanejrozpoczynaj ¾acej si ¾e w c (a) i koncz ¾acej si ¾e w c (b) o wierzcho÷kach znajduj ¾acychsi ¾e na wykresie ÷uku. ×uk nazywamy prostowalny je·zeli ma skonczon ¾a d÷ugosc.
Remark 29 Jest jasne, ·ze je·zeli wezmiemy dwa podzia÷y, �t oraz t0; takie, ·zet0 jest drobniejszy od �t (czyli �t � t0; czyli zawiera wi ¾ecej punktów) to suma popunktach z t0 b ¾edzie niemniejsza od sumy po punktach z �t (tzn. ÷amana g ¾esciejszadok÷adniej aproksymuje d÷ugosc ÷uku i d÷ugosc tej g ¾esciejszej jest wi ¾eksza).
Theorem 30 Na to aby ÷uk c : [a; b] �! Rn, c (t) = (x1 (t) ; x2 (t) ; : : : ; xn (t)) ;by÷prostowalny potrzeba i wystarcza aby funkcje x1 (t) ; x2 (t) ; : : : ; xn (t) ; t 2[a; b] ; by÷y funkcjami o wahaniu skonczonym.
Przypomnienie. Wahaniem funkcji f : [a; b] ! R nazywamy liczb¾e(skonczon ¾a lub nie)
W ba (f) = sup
a=t0<:::<tm=bm2N
mXi=1
jf (ti)� f (ti�1)j :
13

Mówimy, ·ze f jest funkcj ¾a o wahaniu skonczonym w [a; b] ; je·zeli W ba (f) < 1:
Wa·zn ¾a klas ¾a funkcji o wahaniu skonczon ¾a tworz ¾a funkcje spe÷niaj ¾ace warunekLipschitza w przedziale [a; b] ; tzn. takie funkcje dla których istnieje sta÷a Mtaka, ·ze jf (y)� f (x)j �M � jy � xj ; bowiem
supa=t0<:::<tm=b
m2N
mXi=1
jf (ti)� f (ti�1)j � supa=t0<:::<tm=b
m2N
mXi=1
M �jti � ti�1j =M �(b� a) :
Klasa ta zawiera funkcje maj ¾ace ci ¾ag÷¾a pochodn ¾a (wówczasM = supt2[a;b] jf 0 (t)j) gdy·z z Tw Lagrange�a mamy
f (ti)� f (ti�1)ti � ti�1
= f 0 (ci)
dla pewnego ci 2 (ti�1; ti) sk ¾ad
jf (ti)� f (ti�1)jjti � ti�1j
= jf 0 (ci)j �M
jf (ti)� f (ti�1)j �M � jti � ti�1j :
Dowód twierdzenia. Z oczywistej w÷asnosci jaj �qjaj2 + jbj2 � jaj + jbj
otrzymujemy
mXi=1
jxs (ti)� xs (ti�1)j �mXi=1
q[x1 (ti)� x1 (ti�1)]2 + :::+ [xn (ti)� xn (ti�1)]2 �
�mXi=1
jx1 (ti)� x1 (ti�1)j+ :::+mXi=1
jxn (ti)� xn (ti�1)j :
Przechodz ¾ac do kresów górnych otrzymujemy
W ba (xs) � L �W b
a (x1) + :::+Wba (xn) :
St ¾ad je·zeli wszystkie wspó÷rz¾edne xs s ¾a funkcjami o wahaniu skonczonym, toL �W b
a (x1)+:::+Wba (xn) <1: Odwrotnie, je·zeli L <1 toW b
a (xs) � L <1:
De�nition 31 Wektorem predkosci ró·zniczkowalnego ÷uku c : [a; b] �! Rn,c (t) = (x1 (t) ; x2 (t) ; : : : ; xn (t)) ; w miejscu t nazywamy wektor
v (t) := c0 (t) =dc
dt= lim
h!0
c (t+ h)� c (t)h
= [x01 (t) ; :::; xn (t)] :
Przyspieszeniem ÷uku c (t) ; t 2 [a; b] ; kl C2 nazywamy wektor
a (t) := v0 (t) =dv
dt=d2c
dt2= c00 (t) :
14

Wektor pr¾edkosci c0 (t) mo·zemy uwa·zac za wektor zaczepiony w punkcie c (t)i rysowac w postaci strza÷ki o pocz ¾atku w c (t) : Jego d÷ugosc (norm¾e Euklides-ow ¾a)
kc0 (t)k =sX
i
(x0i (t))2
nazywamy predkoscia (skalarn ¾a) ÷uku c w miejscu t.
Theorem 32 Je·zeli wspó÷rz ¾edne xs ÷uku c maj ¾a ci ¾ag÷¾a pochodn ¾a na [a; b], to
L (c) =
Z b
a
q(x01 (t))
2+ :::+ (x0n (t))
2dt =
Z b
a
kc0 (t)k dt:
Proof. 1) Poka·zemy, ·ze
L (c) �Z b
a
kc0 (t)k dt:
Z de�nicji d÷ugosci ÷uku L (c) = supa=t0<:::<tm=bm2N
Pmi=1 kc (ti)� c (ti�1)k :Wezmy
dowolny podzia÷a = t0 < ::: < tm = b przedzia÷u [a; b] :Wtedy c (ti)�c (ti�1) =R titi�1
c0 (t) dt - co wynika dla ka·zdej wspó÷rz¾ednej z podstawowego Tw. rachunkuró·zniczkowego i ca÷kowego - sk ¾ad
mXi=1
kc (ti)� c (ti�1)k =mXi=1
Z ti
ti�1
c0 (t) dt
/patrz Ko÷odziej, Analiza matem. VI.§46.3 Tw.3, str 312/
Z b
a
f
�Z b
a
kfk dla funkcji o wartosci w prz. Banacha
�mXi=1
Z ti
ti�1
kc0 (t)k dt =Z b
a
kc0 (t)k dt:
Z dowolnosci podzia÷u wynika teza.2) Poka·zemy, ·ze
L (c) �Z b
a
kc0 (t)k dt:
Z za÷o·zenia c0 (t) jest jest ci ¾ag÷a na przedziale zwartym, jest wi¾ec na mocy Tw.Heinego (Ko÷odziej, I.§17.3, str. 90) jest ci ¾ag÷a jednostajnie. Wezmy " > 0: Zjednostajnej ci ¾ag÷osci
9�>08s;t2[a;b]�js� tj < � =) kc0 (s)� c0 (t)k < "
2 (b� a)
�: (3)
15

Wezmy m 2 N i podzia÷a = t0 < ::: < tm = b taki, ·ze max1�i�m (ti � ti�1) < �:Wówczas dla dowolnego i oraz t 2 [ti�1; ti]
kc0 (t)k = kc0 (t)� c0 (ti) + c0 (ti)k� kc0 (t)� c0 (ti)k+ kc0 (ti)k(*)� "
2 (b� a) + kc0 (ti)k :
Z ti
ti�1
kc0 (t)k dt �Z ti
ti�1
�"
2 (b� a) + kc0 (ti)k
�dt
="
2 (b� a) (ti � ti�1) + kc0 (ti)k (ti � ti�1)
="
2 (b� a) (ti � ti�1) + kc0 (ti) � (ti � ti�1)k
="
2 (b� a) (ti � ti�1) + Z ti
ti�1
c0 (ti) dt
=
"
2 (b� a) (ti � ti�1) + Z ti
ti�1
(c0 (ti)� c0 (t) + c0 (t)) dt
="
2 (b� a) (ti � ti�1) + Z ti
ti�1
(c0 (ti)� c0 (t)) dt+Z ti
ti�1
c0 (t) dt
� "
2 (b� a) (ti � ti�1) + Z ti
ti�1
(c0 (ti)� c0 (t)) dt +
Z ti
ti�1
c0 (t) dt
� "
2 (b� a) (ti � ti�1) +Z ti
ti�1
kc0 (ti)� c0 (t)k dt+ kc (ti)� c (ti�1)k
(*)� "
2 (b� a) (ti � ti�1) +Z ti
ti�1
"
2 (b� a)dt+ kc (ti)� c (ti�1)k
="
2 (b� a) (ti � ti�1) +"
2 (b� a) (ti � ti�1) + kc (ti)� c (ti�1)k
="
(b� a) (ti � ti�1) + kc (ti)� c (ti�1)k
Dodaj ¾ac stronami dla wszystkich i otrzymujemy
mXi=1
Z ti
ti�1
kc0 (t)k dt �mXi=1
�"
(b� a) (ti � ti�1) + kc (ti)� c (ti�1)k�
="
(b� a) (b� a) +mXi=1
kc (ti)� c (ti�1)k
=mXi=1
kc (ti)� c (ti�1)k+ ":
16

St ¾ad z de�nicji d÷ugosci ÷ukuZ b
a
kc0 (t)k dt �mXi=1
kc (ti)� c (ti�1)k+ " � L (c) + ";
a st ¾ad z dowolnosci " wnosimy o tezie.
De�nition 33 Dwa ÷uki c1 : [a; b]! Rn i c2 : [c; d]! Rn nazywamy równowa·znymi(ró·zni ¾acymi si ¾e o zmian ¾e parametryzacji, inaczej o zmian ¾e zmiennych) je·zeli ist-nieje dyfeomor�zm q : [c; d]! [a; b] (tzn. bijekcja kl. C1 dla której q�1 : [a; b]![c; d] jest te·z kl. C1 ) taki, ·ze
c2 = c1 � q:(Analogicznie okreslamy równowa·znosc przebiegów okreslonych na przedzia÷achotwartych).
Theorem 34 ×uki równowa·zne klasy C1 maj ¾a tak ¾a sam ¾a d÷ugosc.
Proof. Niech c1 : [a; b] ! Rn i c2 : [c; d] ! Rn b¾ed ¾a ÷ukami równowa·znymiró·zni ¾acymi si¾e o zmian¾e parametryzacj¾e q : [c; d] ! [a; b] : Z równosci c2 (t) =c1�q (t)mamy c02 (t) = c01 (q (t))�q0 (t) : Zastosujemy wzór na zamiane zmiennychw ca÷ce oznaczonej pojedynczejZ b
a
g (t) dt =
Z d
c
g (q (t)) � jq0 (t)j dt
do funkcji g (u) = kc01 (u)k :Zachodz ¾a dwie mo·zliwosci: q0 > 0; lub q0 < 0; ale udowodnimy równosc
jednoczesnie dla obu.Otrzymujemy
L (c1) =
Z b
a
kc01 (t)k dt
=
Z d
c
kc01 (q (t))k � jq0 (t)j dt
=
Z d
c
kc01 (q (t)) � jq0 (t)jk dt j jq0 (t)j = �q0 (t) ; kvk = k�vk
=
Z d
c
kc01 (q (t)) � q0 (t)k dt
=
Z d
c
kc02 (u)k du
= L (c2) :
Wiadomo z przyk÷adu wy·zej (a), ·ze równaniem parametrycznym prostejprzechodzacej przez punkt c (t0) i równoleg÷ej do wektora c0 (t0) jest
l (t) = c (to) + (t� to) � c0 (to) :
17

Prosta te nazywamy prosta styczna do ÷uku c (klasy C1) w miejscu t0:Wspólna podstawa wzorów: ró·zniczkowania iloczynu skalarnego i wektorowego
÷uków jest nast¾epuj ¾aca:
Exercise 35 Teoretyczne. Niech f : Rn� :::�Rn ! R b ¾edzie odwzorowaniemwieloliniowym. Dla dowolnych ÷uków kl. C1 ci : [a; b]! Rn zachodzi wzór
@
@t(f (c1(t) ; :::; ck (t)) =
kXi=1
f ((c1(t) ; :::; c0i (t) ; :::; ck (t)) :
Lemma 36 (1) Dane s ¾a ró·zniczkowalne funkcje u, v : [a; b] ! R3. Funkcjau� v : [a; b]! R3 jest równie·z ró·zniczkowalna oraz
(u(t)� v(t))0 = u0(t)� v(t) + u(t)� v0(t), t 2 (a; b):
(2) Prawo ró·zniczkowania iloczynu wektorowego dla n � 2
d
dt[a1 (t)� :::� an�1 (t)] =
Xi
a1 (t)� ::::� a0i (t)� :::� an�1;
(3) Niech b (t) i c (t) beda ÷ukami w Rn oraz niech p (t) i q (t) beda funkcjamiskalarnymi (dziedzina taka sama, t 2 [a; b]). Wówczas� prawo ró·zniczkowania sumy:
d
dt[b (t) + c (t)] = b0 (t) + c0 (t) ;
� prawo ró·zniczkowania mno·zenia przez skalary:
d
dt[p (t) � c (t)] = p0 (t) � c (t) + p (t) � c0 (t) ;
� prawo ró·zniczkowania iloczynu skalarnego:
d
dt[b (t) � c (t)] = b0 (t) � c (t) + b (t) � c0 (t) ;
Exercise 37 Wykazac powy·zsze twierdzenie w oparciu o poprzednie cwiczenieteoretyczne.
2.2 ×uki regularne (imersyjne), parametr naturalny
De�nition 38 Ka·zdy punkt t 2 I dla którego c0(t) = 0 nazywamy punktemosobliwym ÷uku c klasy C1 (dotyczy to oczywiscie przebiegów równie·z).
De�nition 39 ×uk (przebieg) c nazywamy regularnym (lub imersyjnym) jesliw ka·zdym miejscu t wektor pr ¾edkosci jest niezerowy
c0(t) 6= 0. (4)
18

De�nition 40 Dwa ÷uki imersyjne c i d przechodz ¾ace przez ten sam punkt a =c (t1) = d (t2) w miejscach t1 i t2 odpowiednio, nazywamy stycznymi w tychmiejscach, je·zeli ich wektory pr ¾edkosci w tych miejscach s ¾a równe, c0 (t1) =d0 (t2) :
De�nition 41 Niech t 2 I, funkcj ¾a d÷ugosci ÷uku regularnego ÷uku c : I ! Rnz punktu t0 de�niujemy wzorem:
s(t) =
tZt0
kc0 (t)k ds. (5)
De�nition 42 Mówimy, ·ze ÷uk c : I ! Rn jest naturalny (inaczej ma parame-tryzacj ¾e naturaln ¾a lub ÷ukow ¾a) o ile:
s(t) = t� t0, t 2 I, (6)
tzn. gdy parametr t mierzy d÷ugosc ÷uku mi ¾edzy dwoma miejscami: d÷ugosccz ¾esci ÷uku od miejsca c (t1) do c (t2) jest równa jt1 � t2j : Parametr naturalnyzwykle oznaczamy zmienn ¾a s:
Theorem 43 ×uk c : I ! R3 ma parametryzacj ¾e naturalna (÷ukow ¾a) wtedy itylko wtedy,
8t2Ikc0 (t)k = 1. (7)
Proof. Za÷ó·zmy, ·ze parametr ÷uku c : I ! R3 jest naturalny. Wówczas
kc0 (t)k = d
dt
tZt0
kc0 (t)k ds (5)= d
dts(t)
(6)=
d
dt(t� t0) = 1,
co nale·za÷o pokazac. Za÷ó·zmy teraz, ·ze dla wszystkich t 2 I zachodzi równosc:
kc0 (t)k = 1:
Sprawdzimy, czy c (t) jest parametryzacj ¾a ÷ukow ¾a:
s(t) =
tZt0
kc0 (t)k ds (7)=tZt0
1ds = t� t0.
Zatem z de�nicji c jest parametryzacj ¾a ÷ukow ¾a.
Theorem 44 Ka·zdy regularny ÷uk jest równowa·zny z ÷ukiem naturalnym (mówimyte·z, ·ze posiada parametryzacj ¾e ÷ukow ¾a).
19

Proof. Niech c : I ! Rn b¾edzie ÷ukiem regularnym. Zde�niujmy funkcj¾ed÷ugosci ÷uku (lc) (t) = s (t) ; t 2 I:
s(t) =
tZt0
kc0 (�)k d� , t 2 I:
Funkcja s jest ró·zniczkowalna oraz
ds
dt=
d
dt
0@ tZt0
kc0 (�)k d�
1A = kc0 (t)k = dcdt
> 0. (8)
Poniewa·z c (t) jest parametryzacj ¾a regularn ¾a to :
ds
dt=
dcdt (4)6= 0.
Pochodna funkcji s nie zeruje si¾e i jest dodatnia, wi¾ec s jest monotoniczna(rosn ¾aca) na ca÷ym przedziale I. Istnieje zatem funkcja odwrotna do niej:
t = s�1;
czyli funkcja zadana wzorem
t(s) = s�1(t), s 2 s(I); o ile s (t) = s (9)
Niech ÷uk d : J = s(I)! Rn, b ¾edzie okreslony wzorem
d(s) = c(t(s)).
Poka·zemy, ·ze d (s) jest parametryzacj ¾a ÷ukow ¾a: ddds = dcdt
� ���� dtds���� (8)= ����dsdt
���� � ���� dtds���� (9)= ����dsdt
���� � ����ds�1dt
���� .Z twierdzenia o pochodnej funkcji odwrotnej otrzymujemy:����dsdt
���� � ����ds�1dt
���� = 1.Pokazalismy, ·ze istnieje parametryzacja ÷ukowa d (s) ÷uku c (t) (sk ¾ad d madok÷adnie ten sam obraz co c).Cz¾esto dla skrótu b¾edziemy pisac parametryzacj¾e naturaln ¾a ÷uku c (t) po
prostu zamieniaj ¾ac zmienn ¾a t na zmienn ¾a "naturaln ¾a" s; czyli c (s) :
3 Geometria ró·zniczkowa p÷askich przebiegów
Literatura podstawowaM. Do Carmo, Di¤erential Geometry of Curves and Surfaces, Prentice-Hall
Inc., Englewood Cli¤s, New Jersey 1976.Michael Spivak, A comprehensive Introduction to Di¤erential Geometry.
Vol.II, Houston, Texas, 1999.
20

3.1 Krzywizna przebiegu p÷askiego
Krzywizna jest jednym z fundamentalnych i najwa·zniejszych poj¾ec geometriiró·zniczkowej. W najprostszym przypadku krzywych (przebiegów) p÷askich [czyliobiektów 1-wymiarowych w R2] krzywizna powinna spe÷niac intuicyjnie-oczywistewarunki:�1) linia prosta nie ma krzywizny,�2) dla okr¾egów o promieniach R > r okr ¾ag o wi¾ekszym promieniu R ma
krzywizn¾e mniejsz ¾a od okr¾egu o mniejszym promieniu r.Numerycznie, krzywizna w tych dwu przypadkach powinna byc okreslona
nast¾epuj ¾aco:�a) krzywizna � linii postej jest równa � = 0;�b) krzywizna � okr¾egu o promieniu r jest równa � = 1
r :Takie okreslenie numeryczne spe÷nia warunki 1) i 2) wy·zej.Rozwa·zaj ¾ac parametryzacje linii prostej c (t) = x0 + (t� t0) � v; t 2 R;
v 6= 0; widzimy, ·ze c0 (t) = v; c00 (t) = 0, kc00 (t)k = 0; zmiana na parametrnaturalny nie zmienia ostatniej równosci: c (s) = x0 +
skvk � v; c
00 (s) = 0:
Dla równania okr¾egu c (t) = (r cos t; r sin t)mamy parametr naturalny c (s) =�r cos sr ; r sin
sr
�i wtedy
c0 (s) =h� sin s
r; cos
s
r
i;
c00 (s) =
��1rcos
s
r;�1
rsin
s
r
�kc00 (s)k =
1
r:
Zaobserwujmy, ·ze wektor c00 (s) jest prostopad÷y do c0 (s) czyli do okr¾egu ijest skierowany do srodka okr¾egu, co sprawdzamy rysunkowo lub analitycznie
0 = c (s) + c � c00 (s) ; dla c =1
kc00 (s)k > 0:
Naszym celem b¾edzie wykrycie de�nicji krzywizny w miejscu t przebieguimersyjnego c (t) która b¾edzie pracowac dla ka·zdej krzywej klasy C2 i b ¾edziezgadzac si¾e z powy·zszymi postulatami a) i b). Koncepcja jes nast¾epuj ¾aca:b ¾edziemy liczyc krzywizn¾e jako odwrotnosc promienia granicznego okr¾egu prze-chodz ¾acego przez trzy miejsca t1; t2; t3 [gdy c (ti) nie s ¾a wspó÷liniowe dla ti zotoczenia t] dla ti ! t: Oka·ze si¾e, ·ze taki okr ¾ag graniczny [gdy punkty c (ti)dla miejsc ti bliskich t nie s ¾a wspó÷liniowe] zawsze istnieje i odwrotnosc jegopromienia jest równa kc00 (s)k dla parametru naturalnego s na naszym ÷uku c:Zatem za krzywizn¾e ÷uku c (s) nale·zy przyj ¾ac zawsze liczb ¾e
� (s) := kc00 (s)k :
Wiadomo, ·ze przez 3 niewspó÷liniowe punkty na p÷aszczyznie przechodzidok÷adnie jeden okr ¾ag. Standardowy iloczyn skalarny w przestrzeni kartez-janskiej wygodniej b ¾edzie oznaczac symbolem h�; �i:
21

Lemma 45 (Lemat 1) Je·zeli dla p÷askiego (lub przestrzennego) przebiegu imer-syjnego c (t) klasy C2 w pewnym otoczeniu miejsca t ·zadne trzy ró·zne punktyc (t1) ; c (t2) ; c (t3) nie s ¾a wspó÷liniowe oraz C (t1; t2:t3) jest srodkiem okr¾eguprzechodz ¾acego przez te trzy punkty i okr ¾ag graniczny przy ti ! t istnieje, tzn.istnieje graniczny srodek tych okr ¾egów C; tzn.
C (t1; t2:t3)! C; gdy ti ! t;
wówczas
(1) hc0 (t) ; c (t)� Ci = 0;
(2) hc00 (t) ; c (t)� Ci = �hc0 (t) ; c0 (t)i:
Proof. Niech t1 < t2 < t3 b¾ed ¾a ró·znymi miejscami z pewnego ma÷ego otoczeniaustalonego miejsca t: Rozwa·zmy funkcj¾e rzeczywist ¾a
t 7�! hc (t)� C (t1; t2:t3) ; c (t)� C (t1; t2:t3)i = kc (t)� C (t1; t2:t3)k2 :
Wartosci tej funkcji s ¾a takie same w miejscach t1; t2; t3 - s ¾a to kwadraty promieniaokr¾egu. Z Tw. Fermata istniej ¾a �1 2 (t1; t2) i �2 2 (t2; t3) ; takie, ·ze pochodnetej funkcji w �1 i �2 s ¾a równe zeru. Z prawo ró·zniczkowania iloczynu skalarnegootrzymujemy
(1�) hc0 (�i) ; c (�i)� C (t1; t2:t3)i = 0:
Analogicznie funkcja rzeczywista
t 7�! hc0 (t) ; c (t)� C (t1; t2:t3)i
musi miec wartosc 0 w pewnym punkcie � 2 (�1; �2) : Poniewa·z pochodna tejfunkcji jest równa
hc00 (t) ; c (t)� C (t1; t2:t3)i+ hc0 (t) ; c0 (t)i
to dla t = � otrzymujemy
(2�) hc00 (�) ; c (�)� C (t1; t2:t3)i = �hc0 (�) ; c0 (�)i:
Niech ti ! t; wtedy �i ! t oraz � ! t: Skoro z za÷o·zenia C (t1; t2:t3) !C; gdy ti ! t; to z (1�) i (2�) w procesie granicznym dostajemy tezy (1) i (2).
Poniewa·z promien granicznego okr¾egu (jako wektor zaczepiony) jest równy����!C c (t) i ma wspólrz¾edne c (t)� C to z (1) otrzymujemy
Conclusion 46 Okr ¾ag graniczny przechodz ¾acy przez c (t) o srodku w C jeststyczny do ÷uku c (t) (czego nale·za÷o si ¾e spodziewac). Istotnie, poniewa·z wektorstyczny do okr ¾egu w danym miejscu jest prostopad÷y do promienia a z (1) c0 (t)te·z jest prostopad÷y do promienia to okr ¾ag i ÷uk s ¾a w tym miejscu styczne.
22

Z (1) otrzymujemy tak·ze
Conclusion 47 Wektory c0 (t) oraz c00 (t) nie s ¾a wspó÷liniowe. Istotnie, gdybyc00 (t) = k � c0 (t) dla pewnego k 2 R to z (2) i (1) otrzymalibysmy sprzecznosc
0 6= hc0 (t) ; c0 (t)i = �hc00 (t) ; c (t)� Ci = �hk � c0 (t) ; c (t)� Ci= �k � hc0 (t) ; c (t)� Ci = 0:
Exercise 48 Równosci (1) (2) wyznaczaj ¾a punkt C jednoznacznie.Istotnie, Niech v b ¾edzie dowolnym niezerowym wektorem prostopad÷ym do
c0 (t) ; v ? c0 (t) : Z (1) c (t)� C = kv dla pewnego k 2 R: St ¾ad z (2)
hc00 (t) ; kvi = �hc0 (t) ; c0 (t)i;k � hc00 (t) ; vi = �hc0 (t) ; c0 (t)i 6= 0:
St ¾ad (co jest zgodne z ostatni ¾a konkluzj ¾a) hc00 (t) ; vi 6= 0 (bo poniewa·z c0 (t)nie jest wspó÷liniowy z c00 (t) to c00 (t) nie jest prostopad÷y do v co znaczy, ·zehc00 (t) ; vi 6= 0). Tak·ze k 6= 0 oraz
k = �hc0 (t) ; c0 (t)ihc00 (t) ; vi :
St ¾ad
c (t)� C = kv
C = c (t)� kv = c (t) + hc0 (t) ; c0 (t)ihc00 (t) ; vi v:
Obliczymy teraz srodek C granicznego okr¾egu pos÷uguj ¾ac si¾e parametryzacj ¾anaturaln ¾a c (s) rozwa·zanego przebiegu.
Lemma 49 (Lemat 2) Za÷ó·zmy, ·ze przebieg naturalny c (s) klasy C2 spe÷nia wotoczeniu miejsca s za÷o·zenia poprzedniego lematu oraz, ·ze c00 (s) 6= 0: Wówczasokr ¾ag graniczny ma promien r = 1
kc00(s)k i srodek C spe÷nia równanie c (s)�C =� 1kc00(s)k2 c
00 (s) ; tzn.
C = c (s) +1
kc00 (s)k2c00 (s) :
Proof. Dla parametru naturalnego c (s) mamy kc0 (s)k = 1; tzn. c0 (s) 2 S1 �R2: Ró·zniczkuj ¾ac równosc hc0 (s) ; c0 (s)i = 1 otrzymujemy
(*) hc00 (s) ; c0 (s)i = 0;
co oznacza, ·zec00 (s) ? c0 (s) :
Z (1) hc0 (s) ; c (s) � Ci = 0 i (*) wektory c00 (s) i c (s) � C s ¾a prostopad÷e doc0 (s) ; zatem s ¾a równoleg÷e. Z za÷o·zenia c00 (s) 6= 0 istnieje sta÷a a taka, ·ze
c (s)� C = a � c00 (s) : (10)
23

Podstawiaj ¾ac do (2) hc00 (s) ; c (s)� Ci = �1 otrzymujemy
hc00 (s) ; a � c00 (s)i = �1a � kc00 (s)k2 = �1
a = � 1
kc00 (s)k2:
Z (10) mamy
kc (s)� Ck = jaj � kc00 (s)k = 1
kc00 (s)k2� kc00 (s)k = 1
kc00 (s)k :
Pokazalismy, ·ze je·zeli C jest srodkiem granicznego okr¾egu to C spe÷nia równaniec (s)�C = � 1
kc00(s)k2 c00 (s) i promien tego okr¾egu jest równy r = kc (t)� Ck =
1kc00(s)k : Nale·zy zauwa·zyc odwrotnie, ·ze punkt C spe÷niaj ¾acy to równanie jestsrodkiem granicznego okr¾egu. Poniewa·z srodek C jest jedynym rozwi ¾azanem(1) i (2) to wystarczy sprawdzic, ·ze C = c (s) + 1
kc00(s)k2 c00 (s) spe÷nia te oba
równania hc0 (s) ; c (s) � Ci = 0; hc00 (s) ; c (s) � Ci = �hc0 (s) ; c0 (s)i = �1 cojest banalnym cwiczeniem.Okazuje si¾e, ·ze za÷o·zenie c00 (s) 6= 0 gwarantuje istnienie granicznego okr¾egu,
w szczególnosci ·ze w otoczeniu miejsca s ·zadne trzy punkty przebiegu nie s ¾awspó÷liniowe.
Theorem 50 Niech c : (a; b)! R2 b ¾edzie p÷askim przebiegiem naturalnym klasyC2:(A) Jesli w miejscu s 2 (a; b) wektor przyspieszenia c00 (s) jest niezerowy,
c00 (s) 6= 0; wówczas
(I) dla miejsc s1; s2; s3 bliskich s punkty c (s1) ; c (s2) ; c (s3) nie le·z ¾a na jednejprostej,
(II) gdy si ! s to okr ¾ag przechodz ¾acy przez punkty c (si) zbiega do pewnegookr ¾egu granicznego stycznego do przebiegu w miejscu s ktorego promienjest równy 1
kc00(s)k a srodek C (s) le·zy na linii przechodz ¾acej przez c (s) i
prostopad÷ej do c0 (s) i jest równy punktowi C (s) = c (s) + 1kc00(s)k2 c
00 (s) ;
(B) Jesli w miejscu s 2 (a; b) wektor przyspieszenia c00 (s) jest zerowy,c00 (s) = 0; wówczas nawet gdy istniej ¾a ci ¾agi miejsc si ! s takie, ·ze punktyc (si) nie le·z ¾a na jednej prostej (a wi ¾ec przechodz ¾a przez nie okr ¾agi) to okr ¾egi tenie zbiegaj ¾a do ·zadnego okr ¾egu granicznego.
Proof. (A) Niech c00 (s) 6= 0 i sk ¾ad w ma÷ym otoczeniu s tak·ze c00 (�) 6= 0 dla� z tego otoczenia.
24

(I) Przypuscmy, ·ze w tym ma÷ym otoczeniu s istniej ¾a miejsca s1 < s2 < s3takie, ·ze punkty c (si) le·z ¾a na pewnej prostej L
Istniej ¾a wtedy punkty �1 2 (s1; s2) i �2 2 (s2; s3) takie, ·ze styczne do przebieguc w tych miejsach s ¾a równoleg÷e do L: Oznacza, to, ·ze krzywa c0 : (a; b) ! S1
o wartosciach na okr¾egu S1 ma jednakowe wartosci w �1 i �2; c0 (�1) = c
0 (�2) :Dla miejsc bliskich s obraz c0 [�1; �2] nie mo·ze byc ca÷ym okr¾egiem, wi¾ec istnieje� 2 (�1; �2) takie, ·ze c
0 (�) jest najdalej odsuni¾ete (licz ¾ac w jednym z dwumo·zliwych kierunków obiegania po okr¾egu) od punktu c0 (�1) = c
0 (�2) : Oznaczato, ·ze c00 (�) = 0: Ale z ci ¾ag÷osci drugiej pochodnej takie miejsce � nie mo·ze bycbliskie s: Sprzecznosc.(II) Poka·zemy, ·ze okr¾egi przechodz ¾ace przez punkty c (si) dla miejsc si blis-
kich s zbiegaj ¾a do pewnego okr¾egu granicznego, tzn. srodki C (s1; s2; s3) tychokr¾egów zbiegaj ¾a do pewnego punktu granicznego. W tym celu wezmy (jedyny- patrz Cwiczenie 48) punkt C - rozwi ¾azanie uk÷adu równan (1) i (2)
hc0 (s) ; c (s)� Ci = 0;
hc00 (s) ; c (s)� Ci = �hc0 (s) ; c0 (s)i = �1:
Poka·zemy, ·ze w÷asnie C (s1; s2; s3) ! C gdy si ! s: Pokazalismy w dowodzieLematu 1, ·ze stniej ¾a � 2 (s1; s2) i � 2 (s1; s3) ; takie, ·ze zachodzi (1�) i (2�)
(*) hc0 (�) ; c (�)� C (s1; s2:s3)i = 0;
(**) hc00 (�) ; c (�)� C (s1; s2:s3)i = �hc0 (�) ; c0 (�)i = �1
Poka·zemy, ·ze dla si bliskich s normy srodków okr¾egów C (s1; s2:s3) s ¾a ogranic-zone, co równowa·zne jest z ograniczonosci ¾a normy c (�) � C (s1; s2:s3) dla �bliskich s (a wi¾ec i z ograniczonosci ¾a promieni tych okr¾egów. Z (*) c (�) �C (s1; s2:s3) ? c0 (�) : Z naturalnosci parametru s wiemy, ·ze c00 (s) ? c0 (s) ;zatem c00 (�) ? c0 (�) : Poniewa·z w rozwa·zanym ma÷ym otoczeniu s mamyc00 (�) 6= 0 to c (�)�C (si) = a� � c00 (�) dla pewnej liczby a�: Zatem ograniczoscpromieni okr¾egów jest rónowa·zna z ograniczonosci ¾a liczb ja�j : Rozwa·zmy drugie
25

równanie (**)
hc00 (�) ; c (�)� C (si)i = �1hc00 (�) ; c (�)� c (�) + c (�)� C (si)i = �1hc00 (�) ; c (�)� c (�) + a� � c00 (�)i = �1
hc00 (�) ; c (�)� c (�)| {z }ma÷e
i+ a� � hc00 (�) ; �c00 (�)i| {z }ograniczone z do÷u dodatnie
= �1
st ¾ad ja�j nie mo·ze miec podci ¾agu uciekaj ¾acego do nieskonczonosci a tym samympromienie okr¾egów dla miejsc si bliskich s s ¾a z góry ograniczone. Nie mo·ze bycdwu ró·znych granic srodków dla podci ¾agów si ! s gdy·z
c0 (�)! c0 (s) ; c00 (�)! c00 (s) ; gdy si ! s;
sk ¾ad z jednoanacznosci rozwi ¾azania (1) i (2) porównuj ¾ac z (*) i (**) widzimy,·ze granice te musz ¾a byc równe w÷asnie temu jedynemu rozwi ¾azaniu C: Zatemgraniczny okrag istnieje. Z Lematu 2 okr ¾ag graniczny ma promien r = 1
kc00(s)ki srodek C (s) równy
C (s) = c (s) +1
kc00 (s)k2c00 (s) :
(B) Niech c00 (s) = 0. Za÷ó·zmy, ·ze dane s ¾a ci ¾agi miejsc si ! s dla którychpunkty c (si) nie s ¾a wspó÷liniowe i niech C (si) b¾ed ¾a srodkami okr¾egów przez tepunkty przechodz ¾acych i przypuscmy, ·ze te srodki zbiegaj ¾a do pewnego punktuC; C (si) ! C: Jak w dowodzie Lematu 1 dla takich miejsc si znajdziemy� 2 (s1; s3) taki, ·ze hc00 (�) ; c (�) � C (si)i = �1; ale skoro dla si ! s mamy� ! s to c (�) ! c (s), c00 (�) ! c00 (s) = 0; C (si) ! C: St ¾ad w granicydostajemy sprzecznosc
0 = h0; c (s)� Ci = �1:
WYK×AD 4-6
Miejscem wyprostowania przebiegu c klasy C2 nazywamy miejsce w krórymc00 (s) = 0; inaczej, gdy � (s) = kc00 (s)k = 0: Z ci ¾aglosci funkcji � (s) ; dla punktus nie b¾ed ¾acego miejscem wyprostowania istnieje jego otoczenie nie zawieraj ¾acemiejsc wyprostowania.
Remark 51 Cz ¾esc A ostatniego twierdzenia sugeruje, ·ze w otoczeniu miejscaniewyprostowania przebieg le·zy z jednej strony stycznej, mianowicie z tej w któr ¾ajest skierowany wektor c00 (s) (srodek okr ¾egu granicznego jest skierowany w t ¾estron ¾e). Dok÷adniej to mo·zna pokazac w oparciu o wzór Taylora dla funkcjiwektorowej (Ko÷odziej, §40, Tw 15, str 258)
c (s+�s) = c (s) + c0 (s) ��s+ 12c00 (s) � (�s)2 + " (�s) � (�s)2
26

gdzie" (�s) �!
�s!90:
Po÷o·zenie ÷uku c (s+�s) wzgl ¾edem stycznej c (s) + c0 (s) � �s mierzy wektorró·znicy
c (s+�s)� c (s) + c0 (s) ��s
= � (�s) � c0 (s) + � (�s) � c00 (s) =�1
2c00 (s) + " (�s)
�� (�s)2
=
�1
2c00 (s) + "� (�s) � c0 (s) + "� (�s) � c00 (s)
�� (�s)2
=
�"� (�s) � c0 (s) +
�1
2+ "� (�s)
�� c00 (s)
�� (�s)2
Jesli �s jest ma÷e to � (�s) =�12 + "� (�s)
�� (�s)2 > 0 co oznacza, ·ze w
rozk÷adzie wektora ró·znicy wspó÷rz ¾edna przy c00 (s) jest dodatni ¾a, zatem przebiegblisko punktu niewyprostowania le·zy po stronie stycznej w któr ¾a jest skierowanywektor c00 (s) = t0 (s) - patrz poni·zsza de�nicja.
De�nition 52 Jesli s nie jest miejscem wyprostowania przebiegu naturalnegoc : I ! R2 klasy C2 to uk÷ad wektorów
t (s) = c0 (s)
n (s) =c00 (s)
kc00 (s)ktworzy baz ¾e ortonormaln ¾a [bo s ¾a to wersory i c0 (s) ? c00 (s)] (niekonieczniedodatni ¾a) p÷aszczyzny R2, zwan ¾a baz ¾a (reperem) Freneta przebiegu p÷askiego c:W punktach, gdzie k(s) 6= 0, wektor jednostkowy n(s) skierowany jest zgodnie zwektorem c00(s) i jest dobrze okreslony przez równanie:
c00(s) = � (s) � n(s). (11)
Theorem 53 Wzory Freneta przebiegu naturalnego p÷askiego:
t0 (s) = � (s) � n(s)n0(s) = �� (s) � t (s) :
Proof. Pierwszy wzór jest oczywisty. Do dowodu drugiego przedstawmy n0(s) =� � t (s)+� �n(s):Wspó÷czynniki �; � wyliczamy mno·z ¾ac skalarnie przez wektoryz reperu Freneta:
� = hn0(s); t (s)i = �hn(s); t0 (s)i /bo ht (s) ; n (s)i = 0 sk ¾ad ht0; ni+ hn; t0i = 0= �hn(s); � (s) � n(s)i = �� (s) ;
� = hn0(s); n (s)i = 0 /bo hn; ni = 1 sk ¾ad hn0; ni+ hn; n0i = 2hn0; ni = 0:
Zauwa·zmy (cwiczenie), ·ze zmieniaj ¾ac przebieg c na przebieg przebiegaj ¾acyod konca do pocz ¾atku, np. d (s) = c (�s) ; obserwujemy, ·ze krzywizna �d (s) wtych samych punktach przebiegów d i c nie zmienia si¾e.
27

3.2 Krzywizna ze znakiem przebiegu p÷askiego
Krzywiznie p÷askiego przebiegu naturalnego c : I ! R2; I = (a; b) � R; mo·znanadac znak, w tym celu wezmiemy inny reper w miejscu s (bez zak÷adania
·ze nie jest to miejsce wyprostowania). De�niujemy wektor�n (s) równy (patrz
iloczyn wektorowy w R2)�n (s) = t (s)
� czyli przez ·z ¾adanie, aby mia÷d÷ugosc
tak ¾a, jak t (s) czyli, by÷to to wersor i aby baza�t (s) ;
�n (s)
�by÷a dodatnia
(czyli orientowa÷a R2 tak samo jak baza wersorów osi wspó÷rz¾ednych (e1; e2)). W ten sposób, w odró·znieniu od pola wektorowego n (s) ; pole
�n (s) jest
okreslone w ka·zdym miejscu bez wzgl¾edu na to, czy krzywizna � (s) jest równazeru czy nie i przedstawia sob ¾a pole klasy C1:We wspó÷rz¾ednych kartezjanskichc (s) = (x (s) ; y (s)) otrzymujemy t (s) = [x0 (s) ; y0 (s)] ; i (proste cwiczenie)
�n (s) = [�y0 (s) ; x0 (s)] :
W punktach nie b ¾ed ¾acych miejscem wyprostowania wektory n (s) i�n (s) s ¾a
wspó÷liniowe i albo�n (s) = n (s) albo
�n (s) = �n (s) :
De�nition 54 Dla przebiegu naturalnego p÷askiego c : I ! R2; I = (a; b) � R;de�niujemy krzywizn ¾e ze znakiem ~� (s) za pomoc ¾a wzoru
t0 (s) = ~� (s) � �n(s):
Mo·ze ona byc dodatnia, ujemna lub zero. Funkcja ~� (s) jest klasy C1:
Drugi wzór Freneta dla bazy�t (s) ;
�n (s)
�ma postac (trywialne cwiczenie)
�n0(s) = �~� (s) � t (s) :
Gdy s nie jest miejscem wyprostowania, tzn. c00 (s) = t0 (s) 6= 0; wówczast0(s)kt0(s)k = n (s) = ��n (s) ; przy czym jesli baza (t (s) ; n (s)) jest dodatnia, tomamy + i wówczas ~� (s) = � (s) ; zas gdy baza jest ujemna, to mamy � iwówczas ~� (s) = �� (s) ; patrz rysunek i uwaga (51):
Exercise 55 Zauwa·zmy (cwiczenie), ·ze zmieniaj ¾ac przebieg c na przebieg dprzebiegaj ¾acy od konca do pocz ¾atku, np. d (s) = c (�s) ; obserwujemy, ·ze krzy-wizna ze znakiem ~�d (s) w tych samych punktach przebiegów d i c ma przeciwneznaki ~�d (s) = �~� (�s) :
28

Istotnie, td (s) = d0 (s) = �c0 (�s) = �t (�s) ; sk ¾ad�nd (s) = �
�n (�s) - aby
baza�td (s) ;
�nd (s)
�by÷a dodatnia. Dalej mamy
t0d (s) = �� t0 (�s) = t0 (�s) = ~� (�s) � �n(�s) = �~� (�s) � �nd (s) = ~�d (s) ��nd (s) ;
�~� (�s) = ~�d (s) :
De�niujemy dla ka·zdego miejsca s k ¾at � (s) jaki tworzy z osi ¾a X-ów wektorstyczny t (s) : Nie jest on wyznaczony jednoznacznie, dwa takie k ¾aty ró·zni ¾a si¾eo wielokrotnosc 2�: Czy mo·zna w sposób ci ¾ag÷y okreslic funkcje � (s) w ca÷ejdziedzinie przebiegu c (s) ? Rozwa·zmy t jako funkcje o wartosciach w okreguS1 � R2;
t : (a; b)! S1:
Punkt z okr¾egu jest postaci (cos �; sin �) dla pewnego k ¾ata jaki punkt tworzyz osi ¾a OX; dwa takie k ¾aty ró·zni ¾a si¾e o wielokrotnosc 2�; ale dana liczba �(interpretowana tutaj k ¾atem) de�niuje punkt z okr¾egu (cos �; sin �) : Oznacza,to ·ze okreslona jest pomocnicza wa·zna funkcja
� : R! S; � (�) = (cos �; sin �)
Szukamy zatem funkcji ci ¾ag÷ej � : (a; b)! R takiej, ·ze
t (s) = (cos � (s) ; sin � (s)) ;
czyli takiej, ·ze t = � � �R
� % # �(a; b)
t�! S1
Przede wszystkim zaobserwujemy niezwykle wa·zn ¾a w÷asnosc odwzorowania� : R ! S; mianowicie jest to tzw. nakrycie, tzn. ka·zdy punkt q 2 S1 maotwarte w S1 otoczenie Uq które jest "prawid÷owo nakryte", tzn. takie, ·ze
29

��1 [Uq] rozk÷ada si¾e na sum¾e roz÷¾acznych spójnych otwartych sk÷adowych i �obci¾ete do ka·zdej takiej sk÷adowej jest homeomor�zmem na Uq
Aby si¾e przekonac o ci ¾ag÷osci odwracania � na takiej sk÷adowej mo·zemy j ¾alokalnie wyrazic wzorem. Gdy q = (x0; y0) i x0 6= 0 oraz na danej sk÷ad-owej � (2k� + �0) = a dla pewnego ca÷kowitego k oraz (1) �0 2
���2 ;
�2
�lub (2)
�0 2��2 ;
3�2
�to funkcja odwrotna musi byc dana wzorem (1) arctan y
x + 2k�;(2) arctan y
x + � + 2k� [cwiczenie]. Gdy zas x0 = 0 to wykorzystujemy funkcjearccot xy : Wzory te okreslaj ¾a funkcje ci ¾ag÷e.
Proposition 56 Dla dowolnej ci ¾ag÷ej funkcji t : (a; b)! S1 [niekoniecznie pochodz ¾acejod przebiegu] istnieje ci ¾ag÷a funkcja � : (a; b) ! R [podniesienie t] taka, ·zet = � � �; dwie takie funkcje ró·zni ¾a si ¾e o wielokrotnosc 2�: Mo·zna tak·ze za÷o·zyc,·ze dziedzina funkcji t jest przedzia÷em domkni ¾etym [a; b] :
Proof. Najpierw zauwa·zymy jednoznacznosc z dok÷adnosci ¾a do wielokrotnosci2� "podniesienia" funkcji t do funkcji �: Niech �1 i �2 b¾ed ¾a dwiema takimifunkcjami. Dla danego argumentu s0 2 (a; b) wartosci tych funkcji ró·zni ¾a si¾eo konkretn ¾a wielokrotnosc 2�; �1 (s0) = �2 (s0) + 2k0�: Odejmuj ¾ac 2k0� od�1 dostajemy dwa podniesienia równe sobie w s0: Jesli wyka·zemy, ·ze takie dwapodniesienia s ¾a identyczne w ca÷ej dziedzinie, to poka·zemy w ten sposób, ·ze dwadowolne podniesienia ró·zni ¾a si¾e globalnie o t¾e sam ¾a wielokrotnosc 2�: Niechzatem �1 (s0) = �2 (s0) : Niech A � (a; b) b¾edzie zbiorem tych s dla których�1 (s) = �2 (s) : Jasne, ·ze A jest podzbiorem domkni¾etym w (a; b) (dwie funkcjeci ¾ag÷e s ¾a zawsze równe na zbiorze domkni¾etym). Poniewa·z � jest lokalnymhomeomor�zmem, to zbiór A musi tak·ze byc otwartym, istotnie, gdy �1 (s1) =�2 (s1) to obraz pewnego ma÷ego spójnego otoczenia Is1 miejsca s1 za pomoc ¾a tzawarty jest Uq dla q = t (s1) : Z drugiej strony, obrazy tego ma÷ego otoczenia zapomoc ¾a �1 i �2 s ¾a spójne, wi¾ec musza byc zawarte w tej samej spójnej sk÷adowejprzeciwobrazu ��1 [Uq] : Ale na tej sk÷adowej � jest homeomor�zmem, wi¾ec gdy�1 (s1) = �2 (s1) to musz ¾a te·z pokrywac si¾e na tym ma÷ym otoczeniu miejsca s;tym samym A jest otwarty. Poniewa·z (a; b) jest spójny, wi¾ec A = (a; b) :
30

Teraz poka·zemy istnienie podniesienia. Ustalmy s0 2 (a; b) [gdyby rozpa-trywac ÷uk na przedziale domkni¾etym wzielibysmy jego lewy koniec]. Niech Jb¾edzie zbiorem tym miejsc s; s0 < s � b; ·ze istnieje podniesienie � na [s0; s):Niech �s b¾edzie kresem górnym tych miejsc s i przypuscmy, ·ze �s < b: Istniejemiejsce s1 < �s takie, ·ze s1 2 I�s (I�s to takie otwarte otoczenie miejsca �s ·zejego obraz za pomoc ¾a t zawarty jest Uq dla q = t (s1) zas Uq jest prawid÷owonakryty). Niech �� b¾edzie podniesieniem na I�s równym w s1 wartosci � (s1) :St ¾ad skoro dwa podniesienia na zbiorze spójnym ró·zni ¾a si¾e o wielokrotnosc 2�i s ¾a równe w jednym punkcie to pokrywaj ¾a si¾e na tym zbiorze. Oznacza to, ·zepodniesienie � mo·zna zde�niowac dalej ni·z na [s0; �s); mianowicie na [s0; �s)[ I�s;wbrew de�nicji �s: Analogicznie pokazujemy w lew ¾a stron¾e od s0:
Lemma 57 Jesli c : I ! R2; I = (a; b) � R; jest naturalnym przebiegiem klasyC2 i � : I ! R jest podniesieniem funkcji t : I ! S1 to w ka·zdym miejscu s(a) � (s) jest k ¾atem zorientowanym jaki z osi ¾a OX tworzy wektor styczny
t (s) ;(b) �0 (s) = ~� (s) :
Proof. (a) Poniewa·z t = � � � to
c0 (s) = t (s) = [cos � (s) ; sin � (s)]
co z de�nicji k ¾ata zorientowanego pokazuje (a).(b) Ró·zniczkuj ¾ac powy·zsz ¾a równosc dostajemy
c00 (s) = t0 (s) =���0 (s) sin � (s) ; �0 (s) cos � (s)
�;
a wraz z równosci ¾a�n(s) = [� sin � (s) ; cos � (s)]
i zwi ¾azkiem t0 (s) = ~� (s) � �n(s) wnosimy, ·ze
~� (s) = ht0 (s) ;�n(s)i= h
���0 (s) sin � (s) ; �0 (s) cos � (s)
�; [� sin � (s) ; cos � (s)]i
= �0 (s) sin2 � (s) + �0 (s) cos2 � (s)
= �0 (s) :
Proposition 58 Mo·zna zrekonstruowac przebieg naturalny c maj ¾ac jego krzy-wizn ¾e zorientowan ¾a (oznakowan ¾a) ~� : I ! R, jeden z punktów przebiegu c (s0)oraz k ¾at � (s0) jaki ma tworzyc wektor styczny c0 (s0) z osi ¾a OX:
Proof. Z równosci ~� (s) = �0 (s) otrzymujemy poprzez ca÷kowanie
� (s) =
Z s
s0
~� (�) d� + � (s0) :
31

St ¾ad
t (s) = � (� (s)) ;
c (s) =
Z s
s0
t (�) d� + c (s0) :
De�nition 59 Niech p÷aski przebieg naturalny kl. C2; c : [a; b] ! R2; b ¾edzieokreslony na przedziale domkni ¾etym [a; b] i niech ~� : [a; b] ! R b ¾edzie jegooznakowan ¾a krzywizn ¾a. Krzywizn ¾a ca÷kowit ¾a przebiegu c nazywamy liczb ¾e
K =
Z b
a
~� (s) ds:
3.3 W÷asnosc globalna krzywizny przebiegu zamkni¾etego
Dalej b ¾edziemy badac przebiegi zamkni¾ete, tzn. takie, ·ze c (a) = c (b) i spe÷nia-j ¾ace warunki t (a) = c0 (a) = c0 (b) = t (b) i c00 (a) = c00 (b) : Przebiegi zamkni¾etemog ¾a miec samoprzeci¾ecia.
Theorem 60 Je·zeli przebieg naturalny kl. C2; c : [a; b] ! R2; jest zamkni ¾etyoraz
t (a) = c0 (a) = c0 (b) = t (b)
wówczas krzywizna ca÷kowita K jest wielokrotnosci ¾a 2�:
Proof. Niech � : [a; b]! R b¾edzie funkcj ¾a "k ¾at" czyli równowa·znie, podniesie-niem t0 : [a; b] ! S1 do nakrycia � : R ! S1: Wówczas k ¾aty z osi ¾a OX wpocz ¾atku i koncu ró·zni ¾a si¾e o wielokrotnosc 2�; sk ¾ad
K =
Z b
a
~� (s) ds =
Z b
a
�0 (s) ds = � (b)� � (a) = 2k�
dla pewnej liczby ca÷kowitej k:
De�nition 61 Dla przebiegu naturalnego zamkni ¾etego c kl. C2 liczb ¾e ca÷kowit ¾aK2� nazywamy indeksem obrotu.
�) Trudniejszy tekst. Przedzia÷[a; b] zwijamy do okr¾egu o promieniu r = b�a2�
a przebieg zamkni¾ety (nie zak÷adamy naturalnosci) o jednakowych wektorachstycznych mo·zna wtedy rozpatrywac jako g÷adkie odwzorowanie c : S1 (r)! R2:Jego jednostkowe pole wektorowe styczne t jest odwzorowaniem w S1: Zak÷ada-j ¾ac tak·ze równosc c00 (a) = c00 (b) dostaniemy g÷adkie odwzorowanie t :S1 (r)!S1: Na okr¾egu S1 rozwa·zamy lokalnie mapy "k ¾at" i oznaczamy je �; ró·zne takiemapy ró·zni ¾a si¾e o 2k�; wi¾ec forma ró·zniczkowa d� jest dobrze okreslona na S1
i jest generatorem H1�S1�:
32

Proposition 62 Krzywizna ca÷kowita przebiegu c jest równa
K =
ZS1(r)
t� (d�) :
Proof. Oznaczmy podniesienie t : [a; b]! S1 do nakrycia � : R! S1 przez ~�
R~� % � #
[a; b] �!t
S1
Wtedy
K =
Z b
a
~�0(t) dt =
Z b
a
~��(dt) =
Z b
a
~��(dt) :
Z drugiej stronyZS1(r)
t� (d�) =
Z b
a
t� (d�) =
Z b
a
�� � ~�
��d�
=
Z b
a
~����d� =
Poniewa·z � i mapa � s ¾a odwrotne z dok÷¾adnoscia do 2k� to ich ró·zniczki s ¾aodwrotne, sk ¾ad ��d� = dt; zatem
=
Z b
a
~��dt = K:
Theorem 63 Dwa regularne przebiegi c1 (t) i c2 (t) na [a; b] g÷adko homotopijneza pomoc ¾a homotopii H przebiegów regularnych cs (t) ; s 2 [0; 1] ; o jednakowychwektorach stycznych w pocz ¾atku i koncu c0s (a) = c
0s (b) ; c
00s (a) = c
00s (b) posiadaj ¾a
jenakowe krzywizny ca÷kowite.
Proof. Homotopia H : [a; b] � [0; 1] ! R2 indukuje homotopie jednostkowychpól stycznych
~H : S1 (r)� [0; 1]! S1
~H (t; s) = ts (t) :
Skoro
Ks =
ZS1(r)
t�s (d�)
a t0 i t1 s ¾a homotopijne to indukuj ¾a identyczne odwzorowanie na kohomologiit#0 = t#1 : H
�S1�! H
�S1 (r)
�: W szczególnosci dla zamkni¾etej formy d�
33

formy t�0 (d�) i t�1 (d�) s ¾a homologiczne, czyli istnieje 0-forma � na S
1 (r) taka,·ze t�0 (d�) = t
�1 (d�) + d�: Stad
K0 =
ZS1(r)
t�0 (d�) =
ZS1(r)
(t�1 (d�) + d�)
=
ZS1(r)
t�1 (d�) +
ZS1(r)
d� =
ZS1(r)
t�1 (d�) + 0
=
ZS1(r)
t�1 (d�) = K1
poniewa·z ca÷ka po rozmaitosci zwartej zorientowanej n wymiarowej z ró·zniczkin� 1 formy jest zero.
Theorem 64 (Hopf) O indkesie krzywej zamkni ¾etej zwyk÷ej. Indeks krzywejzamkni ¾etej zwyk÷ej czyli bez samoprzeci ¾ec jest równy �1:
Proof. Niech c : [0; L]! R2 b¾edzie krzyw ¾a zwyk÷¾a naturaln ¾a klasy C2 i niech
� = f(s1; s2) ; 0 � s1 � s2 � Lg � R2:
De�niujemy odwzorowanie
� : �! S1
wzorem
� (s1; s2) =c (s2)� c (s1)kc (s2)� c (s1)k
dla s1 < s2 i (s1; s2) 6= (0; L) ;
� (s; s) = c0 (s) = t (s) ;
� (0; L) = �c0 (0) = �t (0) :
Mianownik funkcji � (s1; s2) dla s1 < s2 nie jest zerowy z braku saporzeci¾ecprzebiegu c: Odwzorowanie � jest ciag÷e. Nale·zy to sprawdzic na przek ¾atnej iw lewym górnym rogu.(a) niech s1 < s2 i si ! s: Wtedy po wspó÷rz¾ednych odwzorowania �
�k (s1; s2) =ck (s2)� ck (s1)kc (s2)� c (s1)k
=ck (s2)� ck (s1)
s2 � s1� s2 � s1kc (s2)� c (s1)k
:
Istnieje �s 2 (s1; s2) ; ·ze ck(s2)�ck(s1)s2�s1 =
�ck�0(�s) !
�ck�0(s) : Drugi czynnnik
zatem d ¾azy do 1.(b) niech s1 ! 0 s2 ! L: Zwijamy przebieg do okr¾egu, a wtedy ró·znica od
s1 do s2 wynosi L� s2 + s1 = L� (s2 � s1) < 0: St ¾ad
� (s1; s2) =c (s2)� c (s1)kc (s2)� c (s1)k
=c (s2)� c (s1)L� (s2 � s1)
� L� (s2 � s1)kc (s2)� c (s1)k! c0 (0)�(�1) = �c0 (0) :
34

Poniewa·z indeks jest równy 12�
RS1(r)
t� (d�) i nie zale·zy od wyboru homo-topijnej krzywej z t to mo·zemy isc po krzywej homotopijnej z lewa 1 i góry 2 po brzegu �: Poza tym, przesuniemy parametr s i obrócimy krzyw ¾a tak, abyc (0) = 0 oraz t (0) = e1 by÷wersorem osi OX a ca÷y przebieg le·za÷nad osi ¾a OX(obraz przebiegu jest zwarty wi¾ec od do÷u jest ograniczony i do tego miejscaprzesuwamy parametr s aby startowa÷od 0). 1 (s) = � (0; s) = c(s)
kc(s)k 2 S1
dla s 2 (0; L]; � (0; 0) = c0 (0) = e1; � (0; L) = �c0 (0) = �e1; zatem 1 (s)idzie wzd÷u·z pó÷okr¾egu od e1 do �e1 le·z ¾acego w górnym pó÷okr¾egu, wi¾ec funkcjak ¾at nie mo·ze zakreslic ko÷a a zmieni si¾e tylko od 0 do �: Zas 2 (s) = � (s; L)wzd÷u·z dolnego pólokr¾egu i funkcja k ¾at zmieni si¾e od � do 2�;×¾acznie zakres jest2� czyli indeks krzywej zwyk÷ej zorientowanej dodatnio jest +1 (zorientowanejprzeciwnie �1).
3.4 Dwa twierdzenia ekstremalne o krzywych zwyk÷ych
3.4.1 Nierównosc izoperymetryczna
Na pocz ¾atek przypomnimy twierdzenie Greena, które b¾edzie nam potrzebne doudowodnienia prawdziwosci nierównosci izoperymetrycznej. Obraz przebiegurózniczkowalnego bez samoprzeci¾ecia b¾edziemy nazywac krzyw ¾a zwyk÷¾a. Jesliid ¾ac zgodnie z obiegiem parametru mamy obszar ograniczony krzyw ¾a z lwejstrony, wówczas mówimy o orientacji dodatniej przebiegu.
Theorem 65 (Greena) Niech c(t) = (x(t); y(t)), t 2 [a; b] b ¾edzie przedzi-a÷ami ró·zniczkowaln ¾a parametryzacj ¾a zamkni ¾etej krzywej zwyk÷ej C, dodatniozorientowanej. Niech A oznacza obszar ograniczony przez c (jego brzegiem jest
35

krzywa zwyk÷a C o parametryzacji c (t)) oraz p = p(x; y), q = q(x; y) b ¾ed ¾a funkc-jami rzeczywistymi, okreslonymi na ca÷ym obszarze A i na krzywej C o ci ¾ag÷ychpochodnych cz ¾astkowych, wówczas:ZA
�dq
dx� dp
dy
�dxdy =
Z@A
(pdx+ qdy) =
Z b
a
�p (x (t) ; y (t)) � dx
dt+ q (x (t) ; y (t)) � dy
dt
�dt.
(12)
Example 66 Po÷ó·zmy w (12) funkcje p = �y oraz q = x, wówczas
2 � jAj =ZA
(1 + 1)dxdy =
Z@A
(�ydx+ xdy) =Z b
a
�x(t) � dy
dt� y(t) � dx
dt
�dt
sk ¾ad
jAj =ZA
dxdy =1
2�ZA
(1 + 1)dxdy =1
2�Z b
a
(x � y0 � x0 � y) dt. (13)
K÷ad ¾ac p = �y oraz q = 0 otrzymujemy
jAj =ZA
(0� (�1)) dxdy =Z@A
(�ydx) =Z b
a
�y (t) � x0 (t) dt =Z b
a
(�y � x0) dt:
K÷ad ¾ac p = 0; q = x otrzymujemy
jAj =ZA
dxdy =
ZA
(1 + 0) dxdy =
Z@A
xdy =
Z b
a
x (t) � y0 (t) dt =Z b
a
x � y0dt:
St ¾ad
jAj = �Z b
a
x0 � ydt =Z b
a
x � y0dt = 1
2�Z b
a
(x � y0 � y � x0) dt. (14)
Theorem 67 (nierównosc izoperymetryczna) [do Carmo, str. 33] NiechC b ¾edzie zamkni ¾et ¾a krzyw ¾a zwyk÷¾a, l oznacza d÷ugosc tej krzywej, zas jAj polepowierzchni obszaru ograniczonego t ¾a krzyw ¾a, wówczas:
l2 � 4 � � � jAj > 0
tzn.
jAj � l2
4�( = pole ko÷a o obwodzie l ),
przy czym równosc zachodzi wtedy i tylko wtedy, gdy C jest okr ¾egiem.
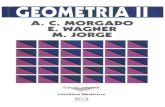
Proof. Niech C b¾edzie zamkni¾eta krzyw ¾a zwyk÷¾a o d÷ugosci l i parametryzacji÷ukowej c(s) = (x(s); y(s)), s 2 [0; l] takiej, ·ze krzywa C jest dodatnio zori-entowana. Wezmy dwie równoleg÷e proste E i E0, niespotykaj ¾ace si¾e z krzyw ¾a
36

C. Przesunmy je w stron¾e krzywej C, do momentu a·z po raz pierwszy przetn ¾asi¾e z C. W ten sposób otrzymalismy dwie równoleg÷e styczne do C, L i L0.Punkty stycznosci z L i L0 oznaczmy odpowiednio przez c(0) i c(s0), gdzie c(0)jest pocz ¾atkiem krzywej C. Poniewa·z krzywa C jest zamkni¾eta, to c(0) = c(l).Zauwa·zmy, ·ze krzywa C jest ca÷kowicie zawarta w pasie ograniczonym przez Li L0. Stwórzmy okr ¾ag S o srodku O styczny do obu prostych, ale nie przecina-j ¾acy si¾e z krzyw ¾a C. Przyjmijmy uk÷ad wspó÷rz¾ednych o pocz ¾atku w punkcie Otaki, ·ze os OX jest prostopad÷a do prostych L i L0. Sparametryzujmy okr ¾ag Su·zywaj ¾ac wspó÷rz¾ednych x parametryzacji c i wyznaczaj ¾ac drug ¾a wspó÷rz¾edn ¾az równania okr¾egu:
��(s) = (�x(s); �y(s)) =
�(x(s);�
pr2 � x2(s)), 0 6 s 6 s0
(x(s);+pr2 � x2(s)), s0 6 s 6 l,
(15)
gdzie r jest promieniem okr¾egu S.
37

Oznaczmy przez jAj pole obszaru ograniczonego krzyw ¾a C, zas przez�� �A�� pole
ko÷a S. Ze wzoru (14) otrzymujemy:
jAj =Z l
0
x � y0ds,
38

�� �A�� = � � r2 = �lZ0
�y � x0ds.
W ten sposób:
jAj+ �r2 =
Z l
0
(xy0 � �yx0) ds 6Z l
0
jxy0 � �yx0j ds =Z l
0
p(xy0 � �yx0)2ds(16)
=
Z l
0
qx2(y0)2 � 2xy0�yx0 + (�y)2 (x0)2ds.
Zauwa·zmy, ·ze
0 6 (xx0 + �yy0)2 = x2(x0)2 + 2xx0�yy0 + (�y)2(y0)2
�2xx0�yy0 6 x2(x0)2 + (�y)2(y0)2, (17)
zatem
jAj+ �r2 =
Z l
0
qx2(y0)2 � 2xy0�yx0 + (�y)2 (x0)2ds (18)
(17)6
Z l
0
qx2(y0)2 + x2(x0)2 + (�y)2(y0)2 + (�y)
2(x0)2ds
6Z l
0
q(x2 + (�y)
2) � ((x0)2 + (y0)2)ds (15)=
Z l
0
q(�x)
2+ (�y)
2 � jc0j ds.
Z równania okr¾egu i za÷o·zenia, ·ze parametryzacja c jest ÷ukowa (jc0(s)j = 1,s 2 s 2 [0; l]) otrzymujemy:
jAj+ �r2 6Z l
0
r � 1ds = lr: (19)
Z faktu, ·ze srednia geometryczna dwóch dodatnich liczb jest mniejsza lub równaich sredniej arytmetycznej, mamy:p
jAj �p�r2 6 1
2� (jAj+ �r2)
(19)6 1
2� lr, (20)
a st ¾ad:4 � jAj�r2 6 l2r2
l2 � 4 � � jAj > 0: (21)
Zauwa·zmy, ·ze równosc w (21) otrzymamy, gdy wsz¾edzie w (16), (18), (19) oraz(20) b¾edzie znak równosci.Z pierwszej nierównosci (20) otrzymujemy wzór na pole powierzchni obszaru
A oraz d÷ugosc krzywej C:
4 � jAj � �r2 = jAj2 + 2 � jAj � �r2 + �2r4 , jAj2 � 2 � jAj � �r2 + �2r4 = 0, (jAj � �r2)2 = 0 , jAj = �r2,
39

2 � �r2 = lr , l = 2 � �r. //
Za÷ó·zmy, ·ze w nierównosci (21) mamy równosc, wówczas powy·zej mamy znakirównosci oraz jAj = �r2 i l = 2 � �r: Poniewa·z w tym ci ¾agu nierównosci kolejnefunkcje sa niemalej ¾ace, to z równosci ca÷ek wynika równosc funkcji, zatem popodniesieniu do kwadratu
(xy0 � �yx0)2 = (x2 + �y2) � (x02 + y02);x2y02 � 2xy0�yx0 + �y2x02 ��� = x2x02 + �y2x02 ���+ x
2y02 + �y2y02
(xx0 + �yy0)2= 0
xx0 + �yy0 = 0x
y0= � �y
x0:
Poniewa·z x02+y02 = 1 i x2
y02 =�y2
x02 to u÷amek ten jest równy x2+ �y2 [rachunkowe
cwiczenie]:�x2 + �y2
�x02 =
�x2 + �y2
� �1� y02
�= x2 + �y2 � x2y02 � �y2y02
= �y2 + x2�1� y02
�� �y2y02 = �y2 + x2x02 � �y2y02
= �y2
St ¾adx
y0= � �y
x0= �
px2 + �y2 = �
p�x2 + �y2 = �r;
zatemx = �ry0:
Poniewa·z r nie zale·zy od kierunku prostej L mo·zemy zamienic x i y w tej relacjii otrzymac y = �rx0: Zatem
x2 + y2 = r2�x02 + y02
�= r2;
co oznacza, ·ze C jest okr¾egiem.
3.4.2 Twierdzenie o czterach wierzcho÷kach
De�nition 68 Wierzcho÷kiem przebiegu c nazywamy punkt c (s)w którym krzy-wizna znakowana jest zerowa ~� (s) = 0:
Theorem 69 Ka·zda krzywa zamkni ¾eta zwyk÷a posiada conajmniej 4 wierzcho÷ki.
Przyk÷adem jest elipsa maj ¾aca dok÷adnie 4 wierzcho÷ki.Proof. Niech c : [0; L]! R2 b¾edzie przebiegiem naturalnym zwyk÷ym zamkni¾e-tym. Krzywizna ~� (s) ma conajmniej 2 punkty ró·zne ekstremalne, maksimum iminimum i w nich s ¾a wierzcho÷ki. Wybierzmy system wspó÷rz¾ednych taki, aby
40

aby os OX przechodzi÷a przez te dwa wierzcho÷ki. Przypomnijmy wzory Frenetadla tego przebiegu
t0 (s) = ~� (s) � �n(s)�n0(s) = �~� (s) � t (s) :
Ca÷kuj ¾ac przez cz¾esci dostajemyZ L
0
~�0 (s) c (s) ds = �Z L
0
~� (s) c0 (s) ds = �Z L
0
~� (s) t0 (s) ds
=
Z L
0
�n0(s)ds =
�n (L)� �
n (0) = 0:
Analogicznie, stosuj ¾ac ró·zniczkowanie iloczynu skalarnego i dwuliniowosc (cwicze-nie) pokazujemy, ·ze Z L
0
~�0 (s) hc (s) ; e2ids = 0: (**)
Powy·zej osi OX wyra·zenie hc (s) ; e2i jest dodatnie, zas poni·zej ujemne. Gdybynie by÷o trzeciego wierzcho÷ka to w jednej pó÷p÷aszczyznie ~�0 (s) > 0 a w drugiej~�0 (s) < 0: Ale wtedy ~�0 (s) hc (s) ; e2i by÷oby w oby pó÷p÷aszczyznach tegosamego znaku, wbrew powy·zszej równosci (**). Zatem musi istniec conajm-niej jeszcze jeden wierzcho÷ek. Argument powy·zszy tak·ze pokazuje, ·ze przebiegc nie mo·ze byc utworzony z dwu ÷uków z ~�0 (s) > 0 na jednym i ~�0 (s) < 0 nadrugim z nich. Tak·ze, poniewa·z gdzies krzywizna jest zerowa, przebieg c niemo·ze byc utworzony z dwu ÷uków z ~�0 (s) � 0 na jednym i ~�0 (s) � 0 na drugim znich. Gdyby nie by÷o czwartego wierzcho÷ka, wówczas pewna para z tych trzechwierzcho÷ków dzieli÷a by przebieg na dwa ÷uki z ~�0 (s) � 0 na jednym i ~�0 (s) � 0wbrew takiej mo·zliwosci.
WYK×AD 7-9
4 Geometria ró·zniczkowa przebiegów w R3
4.1 P÷aszczyzna scisle styczna i krzywizna
Uzasadnimy, ·ze za krzywizn¾e ÷uku c (s) w R3 nale·zy przyj ¾ac zawsze liczb ¾e
� (s) := kc00 (s)k :
Po pierwsze je·zeli okr ¾ag graniczny przy si ! s rodziny okregów przechodz ¾acychprzez trzy bliskie punkty c (s1) ; c (s2) ; c (s3) istnieje to jego srodek C spe÷niate same równania (1) i (2) z Lematu 1, jednak·ze warunki te nie wyznaczaj ¾apunktu C jednoznacznie. Zbadamy najpierw, czy istnieje graniczna p÷aszczyznaprzechodz ¾aca przez rzy bliskie punkty c (s1) ; c (s2) ; c (s3) ; gdy si ! s:
41

Proposition 70 Jesli c : (a; b) ! R3 jest przebiegiem naturalnym klasy C2
takim,·ze w miejscu s wektor c00 (s) jest niezerowy, c00 (s) 6= 0; to dla miejscsi bliskich s punkty c (s1) ; c (s2) ; c (s3) nie s ¾a wspó÷liniowe. Gdy si ! s toistnieje graniczne po÷o·zenie p÷aszczyzn �(si) przechodz ¾acych przez c (si) i jestto p÷aszczyzna �1 (s) rozpi ¾eta przez wektory c0 (s) i c00 (s) :
Proof. a) za÷ó·zmy, na razie ·ze punkty c (s1) ; c (s2) ; c (s3) s1 < s2 < s3 nies ¾a wspó÷liniowe i niech � (si) b¾edzie jednostkowym wektorem prostopad÷ym do
�(si) zale·znym ci ¾agle od si (np. iloczyn wektorowy��������!c (s1) c (s2) �
��������!c (s1) c (s3)
podzielony przez d÷ugosc). Wtedy funkcja
(*) s 7�! hc (s)� c (s2) ; � (si)i
jest równa 0 w punktach si: St ¾ad jej pochodna w pewnych punktach posred-nich �1 2 (s1; s2) i �2 2 (s2; s3) jest zerowa
(1a) hc0 (�i) ; � (si)i = 0;
a dalej w pewnym punkcie posrednim � 2 (�1; �2) pochodna funkcji s 7�!hc0 (s) ; � (si)i te·z b¾edzie zerowa
(2a) hc00 (�) ; � (si)i = 0:
Gdy si ! s to �i ! s oraz � ! s a poniewa·z � (si) s ¾a jednostkowe, tozbiegaj ¾a do jednostkowego wektora prostopad÷ego do c0 (s) i c00 (s) : Zatem �(si)zbiegaj ¾a do �:b) gdyby punkty c (si) dla miejsc bliskich s by÷y wspó÷liniowe, to, do tej
linii istnia÷by ca÷y okr ¾ag wektorów jednostkowych, a wi¾ec okr ¾ag wektorów dlaktórych funkcja (*) zeruje si¾e w si: Powtarzaj ¾ac rozumowanie, wnosimy, ·ze gdyjest ci ¾ag miejsc sni ! s dla których punkty c (sni ) i = 1; 2; 3 s ¾a wspó÷liniowe,to istniej ¾a okr¾egi Sn wektorów jednostkowych prostopad÷e do bliskich miejcu spunktów c0 (�ni ) i c
00 (�n) : Ale c0 (�ni )! c0 (s) i c00 (�n)! c00 (s) : Wybie·zmy wSn dwa wektory prostopad÷e vn i wn; Skoro s ¾a to wektory jednostkowe, to s ¾azawarte w sferze S2 która jest zwarta. Mo·zna zatem wybrac podci ¾agi zbie·znei za÷ó·zmy, ·ze vn ! v oraz wn ! w: St ¾ad tak·ze v i w s ¾a prostopad÷e, a wi¾ecliniowo niezale·zne oraz z procesu granicznego v i w s ¾a prostopad÷e do c0 (s) ic00 (s) co jest niemo·zliwe z liniowej niezale·znosci tych ostatnich.
De�nition 71 P÷aszczyzna �1 (s) otrzymana w powy·zszym Stwierdzeniu nazywasi ¾e p÷aszczyzn ¾a scisle styczn ¾a do przebiegu w miejscu niewyprostowania s: Jestto p÷aszczyzna rozpi ¾eta przez wektory c0 (s) i c00 (s) :
Jest jasne, ·ze graniczny okr ¾ag le·zy na tej p÷aszczyznie. Powtarzaj ¾ac rozu-mowania jak w lematach 1 i 2 i uwzgl¾edniaj ¾ac, ·ze graniczny okr ¾ag le·zy na tejp÷aszczyznie, wniskujemy, ·ze okr ¾ag graniczny ma promien r = 1
kc00(s)k i jego
srodek C (s) le·z ¾acy na �1 (s) spe÷nia równanie c (s)� C (s) = � 1kc00(s)k2 c
00 (s) ;
tzn.C (s) = c (s) +
1
kc00 (s)k2c00 (s) :
42

Zatem za krzywizn¾e przebiegu w R3 nale·zy tak·ze przyj ¾ac
� (s) = kc00 (s)k = kt0 (s)k
i to nawet gdy c00 (s) = 0:
4.2 Reper Freneta-Serreta
De�nition 72 W punkcie niewyprostowania (c00 (s) 6= 0; czyli � (s) 6= 0) prze-biegu naturalnego c klasy C2 de�niujemy baz ¾e (reper) dodatni ¾a Freneta-Serretawersorów
t (s) = c0 (s) wektor stycznyn (s) = t0(s)
kt0(s)k =t0(s)�(s) wektor normalny g÷ówny
b (s) = t (s)� n (s) wektor binormalny
P÷aszczyzny rozpi ¾ete przez ka·zde dwa z nich i przesuni ¾ete do c (s) tworz ¾a tzw.trójscian Freneta, przy czym p÷aszczyzny te nazywamy
�1 = Lin (t (s) ; n (s)) - p÷aszczyzna scisle styczna,
�2 = Lin (n (s) ; b (s)) - p÷aszczyzna normalna
�3 = Lin (t (s) ; b (s)) - p÷aszczyzna prostuj ¾aca
Lemma 73 Wektory n (s) i b0 (s) s ¾a wspó÷liniowe.
Proof. Poniewa·z hb (s) ; b (s)i = 1 to po zró·zniczkowaniu hb0 (s) ; b (s)i = 0co oznacza, ·ze b0 (s) jest kombinacj ¾a t (s) i n (s) : Ale tak·ze hb (s) ; t (s)i = 0i hb (s) ; n (s)i = 0 to
hb0 (s) ; t (s)i = �hb (s) ; t0 (s)i = �hb (s) ; kt0 (s)k � n (s)i = 0
co oznacza, ·ze b0 (s) jest prostopad÷y do t (s) zatem, musi byc wspó÷liniowy zn (s) :
4.3 Skr¾ecenie i jego interpretacja
Conclusion 74 W miejscu niewyprostowania istnieje liczba � (s) taka, ·ze
b0 (s) = �� (s) � n (s)
i nazywa si ¾e skr¾eceniem przebiegu c w miejscu s:
Lemma 75 Przy braku punktów wyprostowania funkcja skr ¾ecenie � = 0 gddyprzebieg jest p÷aski.
Proof. Istotnie, gdy c jest p÷aski, to wektor b (s) = t (s)�n (s) jest prostopad÷ydo p÷aszczyzny przebiegu, sk ¾ad jest sta÷y i b0 (s) = 0: Odwrotnie, gdy � = 0 tob0 (s) = 0 i ca÷kuj ¾ac dostajemy, ·ze b (s) = const = b0: Pociaga to za sob ¾arównosc
hc (s) ; b0i0 = hc0 (s) ; b0i = ht (s) ; b0i = 0
43

sk ¾adhc (s) ; b0i = const:
Zatem dla dowolnego s0
hc (s)� c (s0) ; b0i = 0
co daje prostopad÷osc wektora zaczepionego�������!c (s0) c (s) z wektorem b0; i w
konsekwencji le·zenie ca÷ego przebiegu c (s) w p÷aszczy·znie przechodz ¾acej przezc (s0) i prostopad÷ej do wektora b0:Skr¾ecenie jest zatem miar ¾a odst¾epstwa przebiegu c od p÷askosci. Obraz
funkcji (÷uku) b : (a; b) ! S2 jest jednym punktem gdy przebieg c jest sta÷y.Zinterpretujemy wartosc bezwzgl¾edn ¾a skr¾ecenia w terminach pr¾edkosci zmiand÷ugosci ÷uku b: D÷ugosc ÷uku b od miejsca s0 jest wyra·zona ca÷k ¾a
l (b) (s) =
Z s
s0
kb0 (u)k du =Z s
s0
j� (u)j du
zatem j� (s)j jest pochodn ¾a d÷ugosci ÷uku b :
j� (s)j = (l (b))0 (s) :
W pewnym sensie, j� (s)j jest miar ¾a szybkosci opuszczania p÷aszczyzny scislestycznej przez przebieg c:Wy·zej pokazano, ·ze krzywizna znakowana ~� (s) krzywej p÷askiej jest pochodn ¾a
funkcji k ¾at zorientowany �0 (s) : Krzywizna zwyk÷a � (s) = kt0 (s)k winna bycpochodn ¾a k ¾ata niezorientowanego dla t (s) :
Proposition 76 � (s) = limh!0+^(t(s+h);t(s))
h :
Analogicznie wartosc bezwgl¾edna skr¾ecenia
j� (s)j = kb0 (s)k = limh!0
b (s+ h)� b (s)h
= lim
h!0
b (s+ h)� b (s)h
= limh!0+
kb (s+ h)� b (s)kh
winna byc pochodn ¾a k ¾ata niezorientowanego dla b (s) :
Proposition 77 j� (s)j = limh!0^(b(s+h);b(s))
h+ :
Proof. (Dowody obu granic przebiegaj ¾a identycznie).Wezmy
! (h) = ^ (b (s+ h) ; b (s)) :Skoro trójk ¾at o wierzcho÷kach 0; b (s+ h) ; b (s) jest równoramienny, to
sin1
2! (h) =
12 kb (s+ h)� b (s)k
kb (s)k =1
2kb (s+ h)� b (s)k :
44

Poó·zmy
f (h) =
(sin 1
2!(h)12!(h)
; ! (h) 6= 01; ! (h) = 0
Poniewa·z ! (h) = ^ (b (s+ h) ; b (s)) = arccos (b (s+ h) ; b (s)) /bo s ¾a to wer-sory/ jest ci ¾ag÷a, to f (h) jest te·z ci ¾ag÷a i f (0) = 1: Z powy·zszego
! (h) =2 sin 12! (h)
f (h)
tak·ze gdy ! (h) = 0: St ¾ad
limh!0+
^ (b (s+ h) ; b (s))h
= limh!0+
! (h)
h= lim
h!0+
2 sin 12! (h)
f (h) � h = limh!0
1
f (h)� limh!0+
2 sin 12! (h)
h
= 1 � limh!0+
2 12 kb (s+ h)� b (s)kh
= j� (s)j :
4.4 Interpretacja znaku skr¾ecenia
Przejdziemy do zinterpretowania znaku skr¾ecenia.
Lemma 78 Dla przebiegu naturalnego c klasy C3 bez punktów wyprostowania
� =1
�2(c0; c00; c000) /iloczyn mieszany.
Proof.
� = h�n; b0i = h�n; (t� n)0i = h�n; t0�n+ t� n0i= h�n; t� n0i /bo t0�n = 0 - wektory t0 i n s ¾a równoleg÷e
= h�c00
�; c0�
�c00
�
�0i = h�c
00
�; c0�c
000�� �0c00�2
i
= h�c00
�; c0�c
000
�i /bo c0 � c00?c00
= � 1�2hc0�c000; c00i
=1
�2hc0�c00; c000i = 1
�2(c0; c00; c000) :
Ostatnia równosc wynika z postaci wyznacznikowej iloczynu mieszanego (skosnasymetria).
45

Conclusion 79 � > 0 gdy wektory (c0; c00c000) tworz ¾a baz ¾e dodatni ¾a R3; corównowa·znie oznacza, ·ze wektor c000 le·zy po tej stronie p÷aszczyzny scisle sty-cznej, co wektor binormalny b: Gdy � < 0 - odwrotnie.
Theorem 80 (Interpretacja znaku skr¾ecenia) Gdy � (s) 6= 0 to przebiegprzebija p÷aszczyzn ¾e scisle styczn ¾a.a) Gdy � (s) > 0 wtedy przebieg przechodzi w otoczeniu s spod p÷aszczyzny
scisle stycznej nad ni ¾a (tzn. punkty c (s+ h) dla ma÷ych h > 0 le·z ¾a po tej samejstronie p÷. scisle st. co wektor binormalny b (s) ; a dla ma÷ych h < 0 - poprzeciwnej),b) gdy � (s) < 0 to odwrotnie, z nad p÷. scisle st. pod ni ¾a.
Proof. W formule Taylora
c (s+ h) = c (s) + h � c0 (s) + h2
2� c00 (s) + h3
2� c000 (s) + o
�h3�
sk÷adnik c (s) + h � c0 (s) + h2
2 � c00 (s) le·zy na p÷aszczyznie scisle stycznej w
s; zatem c (s+ h) ��c (s) + h � c0 (s) + h2
2 � c00 (s)
�wskazuje punkty spoza tej
p÷aszczyzny. Gdy c000 (s) 6= 0; to pokazuje to, ·ze przebieg przebija t¾e p÷aszczyzn¾ei punkty c (s+ h) dla ma÷ych h > 0 le·z ¾a po stronie c000 (s) ; a dla h < 0 - poprzeciwnej. W swietle poprzedzaj ¾acego wniosku dostajemy tez¾e.
4.5 Wzory Freneta-Serreta
Theorem 81 (Wzory Freneta-Serreta) Dla przebiegu naturalnego c klasyC3 w punkcie niewyprostowania zachodz ¾a równosci
t0 (s) = � (s) � n (s)n0 (s) = �� (s) � t (s) + � (s) � b (s)b0 (s) = �� (s) � n (s)
Proof. Przypomnijmy relacje de�niuj ¾ace krzywizn¾e i skr¾ecenie (pierwszy itrzeci wzór Freneta)
t0 (s) = � (s) � n (s)b0 (s) = �� (s) � n (s)
Poniewa·z hn; ni = 1 to hn0; ni = 0: sk ¾ad n0 jest prostopad÷y do n a to znaczy, zejest kombinacj ¾a t i b: niech n0 (s) = ��t (s)+��b (s) :Wówczas /hn; ti = 0 = hn; bi;
� = hn0 (s) ; t (s) i = �hn (s) ; t0 (s) i = �hn (s) ;� (s) � n (s) i =� � (s) ;� = hn0 (s) ; b (s) i = �hn (s) ; b0 (s) i = �hn (s) ;� � (s) � n (s) i =� (s) :
Dalsza teoria przebiegów z u·zyciem grup Liego, g÷ównie, GL (3;R) ; S0 (3) ;SL (2) oraz teoria w wymiarze dowolnym n - ksi ¾a·zka Spivaka.
46

5 Powierzchnie klasy C1 w R3
5.1 Ró·zniczka odwzorowania, odwzorowania regularne iTw. o dyfeomor�zmie
Pewne przypomnienie z analizy funkcji wielu zmiennych. Umówmy si¾e, ·ze napisRm � [z inkluzj ¾a w t¾e tylko stron¾e] oznacza÷b¾edzie, ·ze jest zbiorem ot-wartym w Rm: Rózniczk ¾a odwzorowania f : Rm � ! Rn klasy C1 w punkciex0 2 nazywamy odwzorowanie liniowe
f�x0 : Rm ! Rn
okreslone wzorem poni·zszym z u·zyciem pochodnej kierunkowej oznaczanej zwycza-jowo przez f 0jh (x0) [czasem
@f@h (x0)} oraz pochodnych cz ¾astkowych f
0jei (x0) oz-
naczanych przez @f@xi
(x0) lub (za R.Sikorskim fji (x0) aby uniezale·znic si¾e odnazwy zmiennej a tylko jej numeru)
f�x0 (h) = limt!0
f (x0 + th)� f (x0)t
=Xm
i=1hi � fji (x0)
(gdy f =�f1; :::; fn
�to fji (x0) =
hf1ji (x0) ; :::; f
nji (x0)
i). Macierz
(Jf)x0 :=hf jji (x0)
ii�mj�n
nazywa si¾e macierz ¾a Jacobiego odwzorowania f w x0: Niech e1; :::; em b¾edziebaz ¾a wersorów osi wspó÷rz¾ednych w Rm zas ~e1; :::;~en - w Rn: Wtedy
f�x0 (ei) =Xm
k=1�ki �fjk (x0) = fji (x0) =
hf1ji (x0) ; :::; f
nji (x0)
i=
nXj=1
f jji (x0) �~ej
sk ¾ad macierzhaji
ii�mj�n
taka, ·ze
f�x0 (ei) =nXj=1
aji~ej
jest po prostu macierz ¾a Jacobiego odwzorowania f:Z elementarnej algebry liniowej wiemy, ·ze dim Im f�x0 = rank (Jf)x0 : Rz¾e-
dem odwzorowania f w x0 nazywa si¾e wymiar obrazu ró·zniczki dim Im f�x0 ;czyli rank (Jf)x0 : Odwzorowanie f nazywamy regularnym w x0 jesli jego rz ¾adjest maksymalny mo·zliwie, tzn. równy min (m;n) : Gdy m � n to rz ¾ad odw-zorowania regularnego jest n; równowa·znie ró·zniczka jest epimor�zmem. Norm ¾amacierzy Jacobiego (Jf)x0 nazywamy pierwiastek kwadratowy z sumy kwadratówwszystkich podwyznaczników kwadratowych maksymalnego wymiarumin (m;n) :
47

Gdym = n jest to tzw. modu÷Jacobianu - t.j. modu÷wyznacznika det (Jf) (x0) =
dethf jji (x0)
i: Obserwujemy
det (Jf)x0 = dethf jji (x0)
ii�mj�n
= dethaji
ii�mj�n
; gdzie f�x0 (ei) =nXj=1
aji ej :
Gdy m = 1 t.j. f = c jest przebiegiem, wówczas macierz Jacobiego (Jc) (t) =h�c1�0(t) ; :::; (cn)
0(t)ijest po prostu wektorem stycznym do przebiegu c:
Jednym z podstawowych twierdzen z analizy jest
Theorem 82 (a) Gdy m � n i odwzorowanie f : Rm � ! Rn klasy C1jest regularne w x0 to istnieje otoczenie U [otwarte z def] punktu x0; x0 2U � takie, ·ze f jU : Rm � U ! f [U ] � Rn jest homeomor�zmem (tzn. jestró·znowartosciowe i odwrotne do niego f�1 : f [U ]! U jest ci ¾ag÷e, gdzie na f [U ]rozwa·zamy topologi ¾e indukowan ¾a z Rn:(b) (Twierdzenie o dyfeomor�zmie) Gdy m = n j f jest klasy Ck;
k = 1; 2; :::;1; to istnieje otoczenie U punktu x0 takie, ·ze f [U ] jest zbioremotwartym w Rn oraz f jU : Rn � U ! f [U ] � Rn jest dyfeomor�zmem klasyCk: Je·zeli f jest te·z globalnie ró·znowartosciowe to f [U ] jest zbiorem otwartymw Rn i f : Rm � ! f [] � Rn jest dyfeomor�zmem.
Remark 83 Dla m < n z tego, ·ze f jest regularne w ka·zdym punkcie i globalnieró·znowartosciowe nie wynika, ·ze jest homeomor�zmem ! (przyk÷ad: p ¾etelka).
5.2 Powierzchnie i przyk÷ady
De�nition 84 Powierzchni ¾a klasy C1 (tzn. g÷adk ¾a) w R3 nazywamy ka·zdyniepusty podzbiór S � R3 wraz z topologi ¾a indukowan ¾a z R3 o tej w÷asnosci, ·zedla dowolnego punktu x 2 S istnieje jego otoczenieW w S (a wi ¾ec otwarte w S) iodwzorowanie regularne klasy C1 ' : R2 � U ! R3 takie, ·ze Im' = ' [U ] =Wi ' : U ! W jest homeomor�zmem. Ka·zde takie odwzorowanie ' : U ! Wnazywa si ¾e parametryzacj ¾a [lokaln ¾a] powierzchni S: Odwzorowania odwrotne do' : U ! W czyli '�1 : W ! U nazywane s ¾a mapami lub systemami lokalnychwspó÷rz ¾ednych. Mapy cz ¾esto oznaczane s ¾a stylizowan ¾a liter ¾a x =
�x1; x2
�- na
powierzchni 2 wymiarowej s ¾a dwie wspó÷rz ¾edne dla danej mapy. Atlasem nazywasi ¾e zbiór map których dziedziny pokrywaj ¾a ca÷¾a powierzchni ¾e.
×atwo uogólnic t ¾a de�nicj¾e na hiperpowierzchnie klasy Ck wymiaru m wRn: Zwykle 1-wymiarowe hiperpowierzchnie nazywane s ¾a krzywymi i dlategounikamy tego terminu dla ÷uku czy przebiegu.Ci ¾ag÷osc odwzorowania odwrotnego '�1 : W ! U do parametryzacji nie
wynika z pozosta÷ych za÷o·zen (przyk÷ad p¾etelka mno·zona kartezjansko przezodcinek). Ale je·zeli ju·z sk ¾adin ¾ad wiemy, ·ze S jest powierzchnia to wynika:
Theorem 85 Je·zeli S jest powierzchni ¾a j/w to ka·zde ró·znowartosciowe odw-zorowanie regularne ' : U ! Im' =W � S klasy C1 jest parametryzacj ¾a, tzn.' : U ! Im' jest homeomor�zmem (odwrotne jest ci ¾ag÷e).
48

Dowód na wyk÷adzie analizy na rozmiatosciach na st. dokt.Pokazuje si¾e (dowód na analizie), ·ze ka·zdy punkt hiperpowierzchni k-wymiarowej
M � Rn ma parametryzacj¾e ', dla której odwrotna mapa x ='�1 jest rzu-towaniem na pewne k osi. U÷atwia to szereg obserwacji.
De�nition 86 Niech S b ¾edzie pow. j.w oraz '1 : U1 ! S i '2 : U1 ! S dwiemaparametryzacjami otoczen punktu x0 2 S; tzn. x0 2 W = Im'1 \ Im'2 � S:Funkcj ¾a przejscia od '1 do '2 (zmiana zmiennych) nazywamy odwzorowanie
'�12 � '1 : '�11 [W ]! '�12 [W ] :
Theorem 87 Funkcje przejscia s ¾a C1-dyfeomor�zmami.
Dowód na wyk÷adzie analizy na rozmaitosciach na st. dokt.
Theorem 88 Je·zeli F : R3 � ! R jest C1-odwzorowaniem oraz dla a 2ImF ka·zdy z punktów x 2 F�1 [fag] jest punktem regularnosci, tzn. F�x :R3 ! R jest epimor�zmem (równowa·znie jest niezerowe) to S = F�1 [fag] jestpowierzchni ¾a klasy C1:
Dowód na wyk÷adzie analizy na rozmaitosciach na st. dokt. Twierdzenieuogólnia si¾e na dowolne odwzorowanie F : Rm � ! Rn; m > n i wartoscregularn ¾a y 2 ImF; tzn. tak ¾a, ·ze w ka·zdym punkcie x 2 F�1 [fyg] ró·zniczka F�xjest epimor�zmem. Podzbiór F�1 [fyg] jest wtedy hiperpowierzchni ¾a wymiarum� n:
Example 89 (1) sfera S2 =�x2 + y2 + z2 = 1
jest powierzchni ¾a. Przyk÷adami
parametryzacji s ¾a np: 'i : K ((0; 0) ; 1) ! S2 dane wzorami poni·zszymi, któreparametryzuj ¾a pó÷sfery, znalezc przyk÷adowo funkcje przejscia
'1 (x; y) =�x; y;
p1� x2 � y2
�'2 (x; y) =
�x; y;�
p1� x2 � y2
�'3 (x; z) =
�x;p1� x2 � z2; z
�'4 (x; z) =
�x;�
p1� x2 � z2; z
�itd
(regularnosc, ró·znowartosciowosc i ci ¾ag÷osc odwrotnego - proste cwiczenie). Zostatniego twierdzenia ÷atwo zobaczyc, ·ze jest to powierzchnia. Rozwa·zamyfunkcje
F : R3 ! R; (x; y; z) 7�! x2 + y2 + z2;
S2 = F�1 [f1g] :
Poka·zemy, ·ze ka·zdy punkt x 2 S2 jest regularny. W tym celu liczymy macierzJacobiego w (x; y; z) 2 R3
(JF )x = [2x; 2y; 2z] :
49

Macierz ta ma rz ¾ad � 1 i równy niemaksymalnemu tylko gdy rz ¾ad= 0; a tak jesttylko dla x = y = z = 0 ale ten punkt nie le·zy w S2: Zatem S2 sk÷ada si ¾e tylkoz punktów regularnych sk ¾ad jest to powierzchnia.
Exercise 90 Pokazac, ·ze powierzchnia obrotowa S powsta÷a z obrotu wykresuC1-funkcji f (x) ; x 2 (a; b) ; f (x) > 0; dooko÷a osi OX; jest powierzchni ¾a.Znalezc jej parametryzacje. Hint: S =
�(x; y; z) ; x 2 (a; b) ; y2 + z2 = f2 (x)
:
Exercise 91 Pokazac, ·ze powierzchnia obrotowa S powsta÷a z obrotu przebieguy = ' (v) > 0; z = (v) ; wokó÷osi OZ jest powierzchni ¾a. Typowe parametryza-cje: do Carmo str 161.
Exercise 92 Przyk÷ady konkretne, narysowac: (a) katenoida: obrót linii ÷ancu-chowej wokó÷osi OX
y = a � cosh�xa
�; x 2 R;
(b) psedosfera, narysowac: obrót traktrysy (krzywej pogoni) wokó÷osi OY�x = a sin (u)y = a ln
�tan u2 + cosu
�; u 2
��2 ; �
�
50

(c) helikoida, narysowac: obrót odcinka wokó÷srodka z przesuwaniem od-cinka po linii prostopad÷ej do odcinka w jego srodku S = Im'; dla
' (u; t) = (u � cos t; u � sin t; v � t) ; u 2 R; t 2 (a; b) ; v > 0 jest ustalonym parametrem
Na rysunku zwrócmy uwag ¾e na porz ¾adek osi OX i OY (jest odwrotnie ni·z nor-malnie - za to zgodnie z plikiem animowanym)
(d) torus, narysowac: obrót okr ¾egu zawartego w p÷aszczyznie OXZ nie przeci-naj ¾acego osi OZ; np. okr ¾egu (x� 2)2 + z2 = 1; wokó÷osi OZ: Hint: dojsc do
51

równania torusa�p
x2 + y2 � 2�2+ z2 = 1: Podac parametryzacje.
(e) �wst ¾ega Möbiusa: rozwa·zamy okr ¾ag x2 + y2 = 4 i otwarty odcinek ABw p÷aszczyznie OY Z zadany równaniem y = 2; jzj < 1: Poruszamy srodek tegoodcinka po okr ¾egu obracaj ¾ac ten odcinek dwa razy wolniej, tzn. gdy srodek prz-sunie si ¾e po okr ¾egu o k ¾at u wówczas odcinek obrócimy o k ¾at u2 : Dojsc do równanparametrycznych
' (u; v) =
8<: x (u; v) =�2� v � sin u2
�sinu
y (u; v) =�2� v � sin u2
�cosu
z (u; v) = v � cos u2 ;;
u 2 (0; 2�) ; v 2 (�1; 1)u 2 (��; �) ; v 2 (�1; 1)
(problem z pokazaniem ci ¾ag÷osci odwrotnych odwzorowan). Na rysunku trzeba
52

zwrócic uwag ¾e na oznaczenia osi.
WYK×AD 10-12
De�nition 93 Niech S b ¾edzie j/w. Funkcj ¾e f : S ! R nazywamy klasy C1
(g÷adk ¾a) je·zeli dla ka·zdego punktu x0 2 S i pewnej [ka·zdej] parametryzacji ' :U ! S pewnego otoczenia punktu x0 zachodzi
f � ' : U ! R
jest klasy C1: Wszystkie funkcje g÷adkie na S oznaczamy C1 (S) ; jest to piers-cien, a nawet R-algebra. De�nicje mo·zna stosowac do dowolnych hiperpowierzchniM klasy Ck: Funkcje klasy Ck na M tworz ¾a j/w pierscien (R-algebr ¾e).
� Cwiczenie. Pokazuje si¾e, ·ze gdy f :M ! R; M � Rm; jest klasy Ck to dlaka·zdego punktu x0 2M istnieje jego otwarte otoczenie � Rm i funkcja g÷adka(w zwyk÷ym sensie t.j. o ci ¾ag÷ych pochodnych cz ¾astkowych ka·zdego rz¾edu) g :! R taka, ·ze f jS \ = gjS \ ; czyli inaczej mówi ¾ac, gdy f mo·zna lokalnierozszerzyc do funkcji g÷adkiej w zwyk÷ym sensie na zbiór otwarty w Rm:
De�nition 94 NiechM i N b ¾ed ¾a dwiema hiperpowierzchniami klasy Ck (wymi-ary mog ¾a byc ró·zne i mog ¾a byc zanurzone w ró·znych przestrzeniach Euklides-owych). Odwzorowanie
F :M ! N
nazywamy klasy Ck je·zeli dla ka·zdego punktu x0 2 M i pewnych [dowolnych]parametryzacji ' : U !M i : V ! N otoczen punktów x0 i F (x0) odpowied-nio, takich, ·ze F [Im'] � Im z÷o·zenie
�1 � F � '
jest klasy Ck: Je·zeli N = Rn to F =�F 1; :::; Fn
�jest klasy Ck gdy jego
wspó÷rz ¾edne F i s ¾a funkcjami klasy C� na M:
53

×atwo zobaczyc, ·ze z÷o·zenie odwzorowan klasy Ck mi¾edzy hiperpowierzch-niami jest te·z klasy Ck i, ·ze dla F :M ! N klasy Ck odwzorowanie
F � : Ck (N)! Ck (M) ; f 7�! f � F;
jest homomor�zmem pierscieni (R-algebr). Je·zeli F : M ! Rn jest g÷adkie ijego wartosci le·z ¾a na hiperp÷aszczyznie N � Rn to indukowane odwzorowanieF :M ! N jest te·z g÷adkie.
5.3 Wektory i przestrzenie styczne do powierzchni
Niech S � R3 b¾edzie j/w. Oznaczmy wspó÷rz¾edne w R3 przez (x; y; z) zas w R2przez (u; v) lub (u0; v0) :
De�nition 95 Wektorem stycznym do powierzchni S w punkcie p 2 S nazy-wamy wektor styczny c0 (0) 2 R3 do przebiegu c : (�"; ")! S klasy C1 takiego,·ze c (0) = p: (Analogiczna de�nicja obowi ¾azuje dla dowolnej hiperpowierzchni).
Theorem 96 Niech ' : U ! S b ¾edzie parametryzacj ¾a S w otoczeniu punktu p =' (q) ; q 2 U: Wówczas 2-wymiarowa przestrzen wektorowa Im'�q = '�q
�R2��
R3 pokrywa si ¾e ze zbiorem wszystkich wektorów stycznych do S w p:
Proof. Niech w = c0 (0) dla c jak w def. Wezmy �c ='�1 � c : (�"; ") ! U:Wówczas c =' � �c;�c (0) = q i
w = c0 (0) = (' � �c)0 (0) = '�q (�c0 (0)) 2 Im'�q:
Odwrotnie, niech w = '�q (v) ; v 2 R2: Wektor v jest styczny np. do przebiegu� : (�"; ")! U danego wzorem � (t) = q + t � v: St ¾ad
w = '�q (v) = '�q��0 (0)
�= (' � �)0 (0)
jest styczny do przebiegu ' � �:
Conclusion 97 Przestrzen wektorowa Im'�q nie zale·zy od wyboru parame-tryzacji ' i punktu q takiego, ·ze ' (q) = p:
Baz ¾a przestrzeni Im'�q; q = (u; v) ; jest uk÷ad wektorów
'�q
�@
@u jq
�; '�q
�@
@v jq
�oznaczany krócej przez
'ju (q) ; 'jv (q) :
Ró·zniczka'�(u;v) : R2 ! R3
okreslona jest wi¾ec wzorem
'�(u;v) (u0; v0) = u0 � 'ju (u; v) + v0 � 'jv (u; v) :
(Niech x ='�1 b¾edzie map ¾a odwrotn ¾a do '; wtedy wektory te [ogólnie na dowol-nej hiperpowierzchni M ] oznaczamy cz¾esto przez @
@xi jp).
54

De�nition 98 Przestrzen wektorow ¾a Im'�q � R3 nazywamy przestrzeni ¾a sty-czn ¾a do powierzchni S i oznaczamy przez TpS; gdzie p = ' (q) : tak wi ¾ec dlaustalonej parametryzacji ' : U ! S ró·zniczka '�q ustala izomor�zm liniowy
'�q : R2�=�! TpS; p = ' (q) :
Remark 99 Przestrzen styczna w x do hiperpowierzchni F�1 [fyg] (F (x) = y)dla wartosci regularnej y odwzorowania F : Rm � ! Rn; y 2 ImF; jest równa
Tx�F�1 [fyg]
�= kerF�x:
Istotnie, poniewa·z przestrzenie wektorowe Tx�F�1 [fyg]
�i kerF�x s ¾a tego samego
wymiaru wystarcza pokazac zawieranie w jedn ¾a stron ¾e. Niech v 2 Tx�F�1 [fyg]
�b ¾edzie wektorem stycznym do przebiegu c : (�"; ")! F�1 [fyg] : Wówczas
F�x (v) = F�x (c0 (0)) = (F � c)0 (0) = 0
bo F � c jest sta÷y, F � c (t) = y: St ¾ad v 2 kerF�x:
Zde�niujemy ró·zniczk¾e (df)p : TpM ! Tf(p)N odwzorowania mi¾edzy hiper-powierzchniami f :M ! N:
Lemma 100 Je·zeli v 2 TpM jest wektorem stycznym do przebiegu c : (�"; ")!M; v = c0 (0), wówczas wektor (f � c)0 (0) 2 Tf(p)N nie zale·zy od wyboru prze-biegu c: Oznaczamy go przez (df)p (v) : Odwzorowanie
(df)p : TpM ! Tf(p)N; v 7�! (df)p (v) ;
jest liniowe.
Proof. Wezmy dowoln ¾a parametryzacj¾e ' : U ! M w otoczeniu punktu p iprzebieg �c : (�"; ")! U taki, ·ze c = ' � �c: Oczywiscie c0 (0) = '�q (�c0 (0)) gdzieq = '�1 (p) : Je·zeli d jest innym przebiegiem naM takim, ·ze d0 (0) = v wówczas
v = c0 (0) = d0 (0) = '�q (�c0 (0)) = '�q
��d0 (0)
�i z monotonicznosci '�q wynika, ·ze �c
0 (0) = �d0 (0) : St ¾ad
(f � c)0 (0) = (f �' � �c)0 (0) = (f �')�q (�c0 (0)) = (f �')�q
��d0 (0)
�=
�f �' � �d
�0(0) = (f � d)0 (0) :
Poka·zemy teraz (wygl ¾adaj ¾acy na oczywisty) wzór
(df)p�'�q (w)
�= (f �')�q (w) ; w 2 Rm: ((*))
Wektor w jest styczny np. do przebiegu d : (�"; ")! U; d (t) = q + t � w: St ¾ad
(df)p�'�q (w)
�= (df)p
�'�q (d
0 (0))�= (df)p
�(' � d)0 (w)
�def= (f �' � d)0 (w) = (f �')�q (d
0 (0)) = (f �')�q (w) :
55

Poniewa·z (f �')�q : Rm ! Tf(p)N jest odwzorowaniem liniowym i '�q : Rm !TpM jest izomor�zmem, zas z (*) wynika, ·ze
(df)p = (f �')�q ��'�q
��1;
to (df)p jest odwzorowaniem liniowym jako superpozycja odwzorowan liniowych.
Odwzorowanie (df)p : TpM ! Tf(p)N nazywamy ró·zniczk ¾a odwzorowania fw punkcie p; albo odwzorowaniem stycznym do f w punkcie p: Jasne, ·ze je·zeliM = U jest otwartym podzbiorem przestrzeni Euklidesowej Rn to TpM = Rnoraz dla odwzorowania f : U ! N obie ró·zniczki (df)p i f�p s ¾a identyczne.Wykorzystuj ¾ac parametryzacje wokó÷danych punktów na hiperpowierzchni
jest jasne, ·ze zachodzi tw. o dyfeomor�zmie na hiperpowierzchniach tego samegowymiaru::
Theorem 101 Jesli f : M ! N jest g÷adkim odwzorowaniem mi ¾edzy hiper-powierzchniami tego samego wymiaru, p 2M; takim, ·ze (df)p : TpM ! Tf(p)Njest izomor�zmem. Wówczas istnieje otoczenie U �M punktu p takie, ·ze f [U ]jest otwartym podzbiorem N i
f jU : U ! f [U ]
jest dyfeomor�zmem.
6 Odwzorowanie Gaussa na powierzchni
6.1 Pola wektorowe na powierzchni
De�nition 102 Polem wektorowym (g÷adkim) na powierzchni S � R3 nazy-wamy odwzorowanie klasy C1
V : S ! R3
(pole jest g÷adkie gddy wspó÷rz ¾edne V i pola V =�V 1; V 2; V 3
�s ¾a funkcjami g÷ad-
kimi).Pole wektorowe V nazywamy styczne do S je·zeli
V (p) 2 TpS; dla ka·zdego p 2 S:
Notation 103 Dowolna parametryzacja ' : U ! S wyznacza 3 pola g÷adkie(g÷adkosc - proste cwiczenie) 'u; 'v; N okreslone na otwartym w S podzbiorze' [U ] :
� 'u (p) = 'ju�'�1 (p)
�; - pole styczne do S;
� 'v (p) = 'jv�'�1 (p)
�; - pole styczne do S;
56

� N' (p) = 'u (p)�'v (p) ; p 2 ' [U ] ; jest to pole prostopad÷e [normalne]do S: G÷adkosc pola N wynika z tego, ·ze jego wspó÷rz ¾edne s ¾a kombinacjamiiloczynów wspó÷rz ¾ednych pól 'u; 'v (2).
Poniewa·z dla ka·zdego p 2 ' [U ] wektory 'u (p) ; 'v (p) ; N' (p) stanowi ¾abaz¾e [dodatni ¾a] przestrzeni R3 to dla ka·zdego pola V na ' [U ] � S istniej ¾ajednoznacznie wyznczone funkcje �; �; : ' [U ]! R takie, ·ze
V = � � 'u + � � 'v + �N':
Proposition 104 Pole V jest g÷adkie gddy funkcje �; �; s ¾a g÷adkie.
Proof. "(= " oczywiste bo wspó÷rz¾edne pól 'u; 'v; N' s ¾a g÷adkie, to iwspó÷rz¾edne V i = � � 'iu + � � 'iv + �N i
' s ¾a g÷adkie."=) " CWICZENIE.{[�; �; ] (p) �A (p) =
�V 1; V 2; V 3
�(p) dla macierzy o wierszach 'u; 'v; N':
Jest to macierz nieosobliwa, wspó÷rz¾edne macierzy odwrotnej s ¾a g÷adkie sk ¾ad[�; �; ] (p) =
�V 1; V 2; V 3
�(p) �A�1 (p) s ¾a g÷adkie.}
6.2 Orientacja powierzchni
Przypomijmy, ·ze orientacj ¾a skonczenie wymiarowej rzeczywistej przestrzeni wek-torowej V nazywamy klas¾e abstrakcji relacji równowa·znosci zgodnego zorien-towania baz tej przestrzeni. Przestrzen V wraz z wyborem jednej z dwu orien-tacji nazywamy przestrzeni ¾a wektorow ¾a zorientowan ¾a. Przyk÷adowo orientacj¾e(klas¾e abstrakcji) zorientowanej n-wym. przestrzeni wektorowej V oznaczmyprzez OV : Dla danej bazy (a1; :::; an) albo (a1; :::; an) 2 OV i wtedy mówimy obazie dodatniej albo (a1; :::; an) =2 OV i wtedy mówimy o bazie ujemnej.Aby zorientowac powierzchni¾e S � R3 nale·zy zorientowac ka·zd ¾a jej przestrzen
styczn ¾a TpS ale tak aby w pewien sposób orientacja zale·za÷a "w sposób ci ¾ag÷y"od punktu. Sposobem tym jest aby wybrac tak baz¾e dodatni ¾a w punkcie pi w otoczeniu U , (Vp0 ;Wp0) ; p
0 2 U; aby utworzone pola V i W by÷y ci ¾ag÷e.Przyk÷adem takich ci ¾ag÷ych pól mog ¾a byc 'u; 'v; dlatego przyjmiemy nast¾epu-j ¾ac ¾a d�nicj¾e.
De�nition 105 Powierzchni ¾e S nazywamy orientowaln ¾a [dwustronn ¾a] je·zelimo·zna tak wybrac orientacj ¾e ka·zdej przestrzeni wektorowej TpS; p 2 S; abyw otoczeniu ka·zdego punktu istnia÷a parametryzcja ' : U ! S taka, ·ze wektory('u (p) ; 'v (p)) tworzy÷y baz ¾e dodatni ¾a TpS dla p 2 U: Jesli S jest orientowalnai spójna to ma dwie mo·zliwe orientacje, S wraz z wyborem jednej z orientacjinazywamy powierzchni ¾a zorientowan ¾a. Ka·zd ¾a parametryzacj ¾e ' : U ! S taka,·ze wektory ('u (p) ; 'v (p)) tworz ¾a baz ¾e dodatni ¾a TpS dla p 2 U nazywamyparametryzacj ¾a zgodn ¾a z zadan ¾a orientacj ¾a. Dla dwu zgodnych parametryzacji' i macierz przejscia od bazy ('u (p) ; 'v (p)) do bazy ( u (p) ; v (p)) jestdodatnia (bo obie bazy s ¾a z tej samej orientacji przestrzeni TpS).
Przyk÷adem powierzchni nieorientowalnej (jednostronnej) jest tzw. wst¾egaMöbiusa
57

Figure 1: Wstega Mobiusa
Remark 106 Obserwacja: jesli ' i s ¾a dwiema parametryzacjami zorien-towanej powierzchni S z otoczenia punktu p 2 S; zgodnymi z zadan ¾a orientacj ¾a,to Jacobian funkcji przejscia '�12 � '1 od ' do ; czyli modu÷wyznacznika dlaq = ('1)
�1(p) ��J �'�12 � '1� (q)�� = ����'�12 � '1�jji (q)���i;j�2
jest dodatni. istotnie, poniewa·z baza wersorów (e1; e2) w R2 przechodzi przezró·zniczk ¾e parametryzcji na baz ¾e ('u (p) ; 'v (p)) [analogicznie dla ] to Ja-cobian ten (patrz ¾ac na pocz ¾atek wyk÷adu) jest dok÷adnie równy wyznacznikowimacierzy przejscia od bazy ('u (p) ; 'v (p)) do bazy ( u (p) ; v (p)) a wi ¾ec jestdodatni. Dla powierzchni zorientowanej wybieramy podatlas f'�g parametryza-cji zgodnych z zadan ¾a orientacj ¾a i atlas tem charakteryzuje si ¾e tym, ·ze funkcjeprzejscia maj ¾a dodatni Jacobian. Odwrotnie, maj ¾ac taki atlas mo·zemy jednoz-nacznie zorientowac powierzchni ¾e orientuj ¾ac TpS dla dowolnego p 2 S poprzezwybór orientacji wyznaczonej przez baz ¾e ('u (p) ; 'v (p)) dla dowolnej parame-tryzacji ' z tego atlasu (taka obserwacja pozwala uogólnic orientowalnosc nadowolne hiperpowierzchnie i rozmaitosci ró·zniczkowe).
Powierzchni¾e mo·zna tak·ze zorientowac równowa·znie (ogólniej ka·zd ¾a hiper-powierzchni¾e kowymiaru 1 czyli wymiaru n� 1 w Rn) za pomoc ¾a ci ¾ag÷ego polawektorowego jednostkowego i prostopadlego do S: Zaczniemy od pomocniczegolematu.
58

Lemma 107 Niech A =haji
ib ¾edzie macierz ¾a przejscia od bazy ('u (p) ; 'v (p))
do bazy ( u (p) ; v (p)) : Wówczas
u (p)� v (p) = detA � 'u (p)� 'v (p) :
Proof. Ze skosnej symetrii iloczynu wektorowego
u (p)� v (p) =�a11'u (p) + a
21'v (p)
���a12'u (p) + a
22'v (p)
�= 0 + a11a
22 � 'u (p)� 'v (p) + a
21a12 � 'v (p)� 'u (p) + 0
=�a11a
22 � a21a12
�� 'u (p)� 'v (p)
= detA � 'u (p)� 'v (p) :
Theorem 108 Powierzchnia S � R3 jest orientowalna gddy istnieje na niejci ¾ag÷e pole wektorowe niezeruj ¾ace si ¾e i prostopad÷e do S:
Proof. "=)" Niech S b¾edzie powierzchni ¾a zorientowan ¾a. W otoczeniu ka·zdegopunktu p 2 S wybieramy dowolnie parametryzacj¾e ' : U ! S zgodn ¾a z zadan ¾aorientacj ¾a. Wówczas pole wektorowe na Im'
N (p0) ='u (p
0)� 'v (p0)
k'u (p0)� 'v (p0)k
jest nie tylko ci ¾ag÷e, prostopad÷e do S ale jeszcze jednostkowe. W otoczeniu p niezale·zy ono od wyboru parametryzacji dzi¾eki poprzedniemu lematowi i dlategode�niuje globalnie okreslone pole wektorowe na S o szukanych w÷asnosciach."(=" Niech N : S ! R3 b¾edzie dowolnym ci ¾ag÷ym polem wektorowym na
S niezerowym i prostopad÷ym do S: Orientujemy ka·zd ¾a przestrzen TpS poprzezzadanie bazy (a; b) takiej, ·ze uk÷ad (a; b;N (p)) jest baz ¾a doatni ¾a R3: Dla dowol-nego punktu p 2 S wybierzmy dowolnie parametryzacj¾e ' z otoczenia spójnegopunktu p tak ¾a, aby w p wektory ('u (p) ; 'v (p)) tworzy÷y baz¾e dodati ¾a. Istniejewtedy dodatnia liczba r > 0 taka, ·ze 'u (p)� 'v (p) = � (p) �N (p) : Tak·ze jestfunkcja � niezerowa taka, ·ze 'u � 'v = � � N i równa r w p; � (p) = r: Zci ¾ag÷osci pól funkcja � jest ciag÷a, wi¾ec funkcja � > 0 co dowodzi, ·ze N zale·zyw sposób ci ¾ag÷y od punktu a tym samym, ·ze S jest orientowalna.Oczywiscie powierzchnia posiadaj ¾aca parametryzacj¾e globaln ¾a S = ' [U ] jest
orientowalna.
6.3 Odswzorowanie Gaussa
De�nition 109 Niech S b ¾edzie powierzchni ¾a zorientowan ¾a przez pole ci ¾ag÷eniezerowe prostopad÷e N : S ! R3: Skoro
kN (p)k = 1; p 2 S;
59

to wartosci pola N le·z ¾a na sferze 2-wymiarowej S2 � R3; pole N wyznacza wi ¾ecodwzorowanie (oznaczane t ¾a sam ¾a liter ¾a)
N : S ! S2
które nazywa si ¾e odwzorowaniem Gaussa powierzchni zorientowanej S: Jest onog÷adkie [CWICZENIE].
Remark 110 Wa·zna obserwacja. Poniewa·z N (p) 2 S2 to wektor wodz ¾acyN (p) (
����!0 N (p)) jest prostopad÷y do sfery S2 a sk ¾ad i do przestrzeni stycznej do
sfery w N (p) ;N (p) ? TN(p)S2:
Tak·ze przestrzen styczna TpS jest prostopad÷a do wektora N (p) ;
N (p) ? TpS;
zatem obie jako 2-wymiarowe przestrzenie wektorowe TN(p)S2 i TpS w R3 prostopad÷edo tego samego wektora N (p) s ¾a identyczne
TpS = TN(p)S2:
W konsekwencji ró·zniczka odwzorowania N w punkcie p 2 S jest liniowym en-domor�zmem przestrzeni wektorowej TpS
(dN)p : TpS ! TpS:
Remark 111 Je·zeli S = S2 jest sfer ¾a zorientowan ¾a na zewn ¾atrz przez pole �Nwówczas �N (p) =
�!0p = p (równosc wspó÷rz ¾ednych) i
�d �N�p= IdTpS ; zas gdy do
wewn ¾atrz przez pole=
N = � �N , to=
N (p) = ��!0p = �p i wtedy�d=
N
�p
= � IdTpS :
Poniewa·z dla dowolnej powierzchni S � R3 przestrzen styczna TpS jest pod-przestrzeni ¾a wektorow ¾a R3; mo·zna do niej obci ¾ac standardowy iloczyn skalarnyh�; �i : R3�R3 ! R; h(x; y; z) ; (x0; y0; z0)i =
P3i=1 xi �x0i otrzymuj ¾ac tak·ze iloczyn
skalarnyh�; �ip : TpS � TpS ! R
(czyli odwzorowanie dwuliniowe symetryczne i niezdegenerowane).
Exercise 112 Otrzymane pole iloczynów skalarnych h�; �ip; p 2 S; g÷adko zale·zyod p w tym sensie, ·ze dla dowolnych g÷adkich pól wektorowych stycznych doS; V1 i V2; ich iloczyn skalarny liczony punkt po punkcie jest funkcj ¾a g÷adk ¾ahV1; V2i : S ! R; hV1; V2i (p) = hV1 (p) ; V2 (p)ip: Pole tych iloczynów skalarnychnazywamy polem Riemanna powierzchni S:
Poni·zsza dedinicja jest ogólna dla dowolnej przestrzeni wektorowej z iloczynemskalarnym.
60

WYK×AD 13-15
De�nition 113 Niech W b ¾edzie skonczenie wymiarow ¾a przestrzeni ¾a wektorow ¾az iloczynem skalarnym h�; �i :W�W ! R: Endomor�zm A :W !W nazywamysamosprz ¾e·zonym je·zeli
hAv;wi = hv;Awi; dla v; w 2W:
Theorem 114 Dla powierzchni zorientowanej S ró·zniczka (dN)p : TpS ! TpSodwzorowania Gaussa w dowolnym punkcie p 2 S jest endomor�zmem samo-sprz ¾e·zonym h(dN)p (v) ; wip = hv; (dN)p (w)ip; dla v; w 2 TpS:
Proof. Z powodu dwuliniowosci iloczynu skalarnego wystarczy równosc sprawdzicdla wektorów (w1; w2) stanowi ¾acych dowoln ¾a ustalon ¾a baz¾e TpS:Wezmy parametryzacj¾e ' z otoczenia U punktu p = ' (u; v) i baz¾e ('u (p) ; 'v (p)) :
Poka·zemy równosc
h(dN)p ('u (p)) ; 'v (p)ip = h'u (p) ; (dN)p ('v (p))ip:
Poniewa·z
(dN)p ('u (p)) = (dN)p ('u (' (u; v))) = (dN)p
�'ju (u; v)
�(N � ')ju (u; v)
to wystarcza pokazac równosc funkcji na
h(N � ')ju ; 'jvi = h'ju;�N � 'jv
�:
Poniewa·z pole N jest prostopad÷e do S a pola 'u; 'v s ¾a styczne to
hN � ';'jui = hN � ';'jvi = 0: (22)
St ¾ad ró·zniczki tych funkcji po v i u s ¾a równe te·z zeru, s ¾a wi¾ec jednakowe.Ró·zniczkuj ¾ac je po v i u dostajemy
hN � ';'juijv = 0 = hN � ';'jvijuh(N � ')jv ; 'jui+ hN � ';'juvi = h(N � ')ju ; 'jvi+ hN � ';'jvui:
Skoro pochodne mieszane s ¾a równe to h(N � ')jv ; 'jui = h(N � ')ju ; 'jvi:
6.4 Teoria endomor�zmu samosprz¾e·zonego w wymiarze 2
Celem pragrafu jest pokazanie twierdzenia mówi ¾acego, ·ze dla endomor�zmusamosprz¾e·zonego istnieje baza ortonormalna w której macierz tego endomor-�zmu jest diagonalna.
Lemma 115 Niech W b ¾edzie dowoln ¾a skonczenie wymiarow ¾a przestrzeni ¾a wek-torow ¾a z iloczynem skalarnym h�; �i: Endomor�zm A : W ! W jest samo-sprz ¾e·zony gddy jego macierz w pewnej bazie ortonormalnej jest symetryczna.
61

Proof. Niech (a1; :::; an) b¾edzie baz ¾a ON przestrzeniW i niech A =haji
ib¾edzie
macierz ¾a endomor�zmu A w tej bazie. Skoro
hAai; aji = hXk
aki � ak; aji =Xk
aki � hak; aji =Xk
aki � �kj = aji
hai; Aaji = hai;Xk
akj aki = ::: = aij
tohAai; aji = hai; Aaji () aji = aij :
Dowód w stron¾e(= otrzymamay korzystaj ¾ac z dwuliniowosci iloczynu skalarnego.
Odwzorowanie liniowe A :W !W de�niuje odwzorowanie dwuliniowe
B : W �W ! RB (v; w) = hAv;wi:
Wprost z de�nicji widzimy, ·ze A jest samosprz¾e·zony gddy B jest symetryczne.
De�nition 116 Funkcj ¾e Q :W ! R nazywamy form ¾a kwadratow ¾a gdy istniejeodwzorowanie dwuliniowe symetryczne B :W �W ! R takie, ·ze
Q (v) = B (v; v) :
Exercise 117 ! Znajomosc formy kwadratowej Q wystarcza do odtworzenia en-domor�zmu A z uwagi na niezdegenerowanie iloczynu skalarnego h�; �i i równosc
hAv;wi = B (v; w) =1
2(Q (v + w)�Q (v)�Q (w)) : (23)
Exercise 118 Wykazac, ·ze dowolna forma kwadratowa Q na przestrzeni R2 zestandardowym iloczynem skalarnym jest postaci
Q (x; y) = a � x2 + 2b � x � y + c � y2: (24)
Pomocniczy Lemat:
Lemma 119 Je·zeli forma kwadratowa (24) na R2 po obci ¾eciu do okr ¾egu S1 :x2 + y2 = 1 ma maksimum w punkcie (1; 0) to b = 0:
Proof. Parametryzujemy okr ¾ag k ¾atem x = cos t; y = sin t i obliczamy
~Q (t) = Q (x (t) ; y (t)) = a � cos2 t+ 2b � cos t � sin t+ c � sin2 t= a � cos2 t+ b � sin 2t+ c � sin2 t:
Maksimum w punkcie (1; 0) = (cos 0; sin 0) formyQ na okr¾egu S1 jest równowa·znamaksimum funkcji ~Q (t) w punkcie t = 0 a to pociaga znikanie pochodnej tejfunkcji w tym punkcie ~Q0 (0) = 0. Skoro
~Q0 (t) = 2a � cos t � sin t+ 2b � cos 2t+ 2c � sin t � cos t
62

to~Q0 (0) = 2b = 0
daje równosc b = 0:
Proposition 120 Niech Q b ¾edzie form ¾a kwadratow ¾a na 2-wymiarowej przestrzeniwektorowejW z iloczynem skalarnym, wówczas istnieje baz ON (e1; e2) przestrzeniW taka, ·ze
Q (x � e1 + y � e2) = �1 � x2 + �2 � y2
dla pewnych liczb rzeczywistych �1 i �2; przy czym liczby te s ¾a równe odpowiedniomaksimum i minimum formy Q na okr ¾egu jednostkowym kvk = 1:
Proof. Niech �1 b¾edzie równe maksimum formy Q na ok¾egu kvk = 1 i oz-naczmy przez e1 wektor jednostkowy (ke1k = 1) dla którego �1 = Q (e1) :Wezmy dowolny drugi wektor jednostkowy e2 prostopad÷y do e1 i po÷ó·zmy �2 =Q (e2) : Uk÷ad wektorów (e1; e2) stanowi baz¾e ON przestrzeni W: Obliczamy dlav = x � e1+ y � e2 i odwzorowania dwuliniowego symetrycznego B :W �W ! Rwyznaczaj ¾acego Q
Q (v) = B (v; v) = B (x � e1 + y � e2; x � e1 + y � e2)= x2 �Q (e1) + x � y �B (e1; e2) + y � x �B (e2; e1) + y2 �Q (e2)= �1 � x2 + 2b � x � y + �2 � y2
dlab = B (e1; e2) :
Z za÷o·zenia Q ma maksimum w punkcie e1 = 1 � e1 + 0 � e2 co oznacza, ·ze
~Q (x; y) := �1 � x2 + 2b � x � y + �2 � y2
ma maksimum w punkcie (1; 0) : Z lematu pomocniczego b = 0 co daje równosc
Q (v) = �1 � x2 + �2 � y2
dla v = x � e1 + y � e2: Pozostaje sprawdzic, ·ze �2 jest równe minimum formyQ na okr¾egu kvk = 1: Okr ¾ag ten w bazie ON (e1; e2) sk÷ada si¾e z wektorówv = x � e1 + y � e2 dla których x2 + y2 = 1: Przede wszystkim �1 � �2 bo �1 jestwartosci ¾a maksymaln ¾a. Dla dowolnego wektora v jednostkowego
Q (v) = �1 � x2 + �2 � y2 � �2 � x2 + �2 � y2 = �2 ��x2 + y2
�= �2:
Theorem 121 Niech A : W ! W b ¾edzie odwzorowaniem samosprz ¾e·zonym nana 2-wymiarowej przestrzeni wektorowej W z iloczynem skalarnym h�; �i: Wów-czas istnieje baza ON (e1; e2) przestrzeni W dla której
A (e1) = �1 � e1 i A (e2) = �2 � e2
63

dla pewnych jednoznacznie wyznaczonych liczb rzeczywistych takich, ·ze �1 � �2:W takiej bazie macierz przekszta÷cenia A jest diagonalna i równa si ¾e�
�1 00 �2
�:
Liczby �1 i �2 s ¾a odpowiednio wartosci ¾a maksymaln ¾a i minimaln ¾a formy kwadra-towej Q (v) = hAv; vi na okr ¾egu jednostkowym fv : kvk = 1g :Wektory e1 i e2 s ¾a wektorami w÷asnymi przekszta÷cenia A zas �1 i �2 wartos-
ciami w÷asnymi przynale·znymi tym wektorom w÷asnym.Je·zeli �1 6= �2 to wektory e1 i e2 s ¾a wyznaczone jednoznacznie z dok÷adnosci ¾a
do sta÷ej �1 (tzn. kierunki wyznaczone przez wektory w÷asne s ¾a wyznaczonejednoznacznie).
Proof. Rozwa·zmy form¾e kwadratow ¾a Q (v) = hAv; vi: Na mocy Stwierdzeniaistnieje baza ON (e1; e2) w przestrzeni W taka, ·ze Q (x � e1 + y � e2) = �1 � x2 +�2 � y2; przy czym �1 i �2 s ¾a odpowiednio maximum i minimum wartosci formyQ na okr¾egu fv; kvk = 1g : Oczywiscie Q (e1) = �1 � �2 = Q (e2) : Pozostajesprawdzic równosci A (e1) = �1 � e1 i A (e2) = �2 � e2: Otó·z
hAe1; e1i = Q (e1) = �1 = h�1e1; e1i
zas z (23) hAv;wi = 12 (Q (v + w)�Q (v)�Q (w))
hAe1; e2i =1
2(Q (1 � e1 + 1 � e2)�Q (e1)�Q (e2)) =
1
2
��1 � 12 + �2 � 12 � �1 � �2
�= 0 = h�1e1; e2i:
Zatem z dwuliniowosci iloczynu skalarnego dla dowolnego wektora v
hAe1; vi = h�1e1; vi:
Z niezdegenerowania iloczynu skalarnego Ae1 = �1e1; analogicznie pokazujemydrug ¾a równosc A (e2) = �2 � e2:
6.5 Pierwsza i druga podstawowa forma kwadratowa powierzchni
Iloczyn skalarny h�; �ip : TpS � TpS ! R jako odwzorowanie dwuliniowe sym-etryczne indukuje form¾e kwadratow ¾a
Ip : TpS ! RIp (v) = hv; vip = kvk2 � 0:
De�nition 122 Forma kwadratowa Ip na przestrzeni TpS okreslona powy·zejjest nazywana pierwsz ¾a podstawow ¾a form ¾a kwadratow ¾a powierzchni S w punkciep:
Wyrazimy teraz pierwsz ¾a form¾e kwadratow ¾a I powierzchni S w termiachdowolnej parametryzacji ' : U ! S we wspó÷rz¾ednych (u; v) 2 U i bazie 'ju;'jv ('ju (u; v) = 'u (' (u; v)) ...): Wprost z de�nicji otrzymujemy:
64

Lemma 123 Dla wektora v = u0 �'ju (u; v)+v0 �'jv (u; v) i p = ' (u; v) zachodzi
Ip (v) = E (u; v) � (u0)2 + 2 � F (u; v) � u0 � v0 +G (u; v) � (v0)2
dla
E (u; v) = h'ju (u; v) ; 'ju (u; v)ip = 'ju (u; v) 2 ; (25)
F (u; v) = h'ju (u; v) ; 'jv (u; v)ip;
G (u; v) = h'jv (u; v) ; 'jv (u; v)ip = 'jv (u; v) 2 :
Na otoczeniu U mamy pole form kwadratowych
I (v) = E � (u0)2 + 2 � F � u0 � v0 +G � (v0)2 :
WspólczynnikiE;F;G nazywaj ¾a si¾e wspó÷czynnikami pierwszej formy kwadra-towej I w bazie 'ju; 'jv (t.j. dla parametryzacji ').
Exercise 124 Znalezc pierwsz ¾a form ¾e kwadratow ¾a dla (a) p÷aszczyzny P oparametryzacji ' (u; v) = p0 + u � w1 + v � w2 dla bazy ON (w1; w2) ; (b) dlahelikoidy ' (u; v) = (cosu; sinu; v) :
Exercise 125 Znalezc pierwsz ¾a form ¾e kwadratow ¾a powierzchni obrotowej ogól-nej z przyk÷adu (91) o prametryzacji ' (u; v) = (f (v) cosu; f (v) sinu; g (v)) ;a � v � b; 0 < u < 2�; f (v) > 0: W szczególnosci zastosowac dla katenoidyx = a cosh v; z = av; v 2 R:
Liniowy endomor�zm (dN)p : TpS ! TpS (z racji, ·ze jest samosprz¾e·zony)i iloczyn skalarny okreslaj ¾a odwzorowanie dwuliniowe symetryczne B (v; w) =h� (dN)p (v) ; wi a to z kolei wyznacza form¾e kwadratow ¾a.
De�nition 126 Niech S b ¾edzie powierzchni ¾a zorientowan ¾a zas N : S ! S2 jejodwzorowaniem Gaussa. Dla punktu p 2 S forma kwadratowa
IIp : TpS ! RIIp (v) = h� (dN)p (v) ; vi
wyznaczona przez samosprz ¾e·zone odwzorowanie � (dN)p : TpS ! TpS nazywasi ¾e drug ¾a podstawow ¾a form ¾a kwadratow ¾a powierzchni zorientowanej S:
Example 127 Dla sfery S2 zorientowanej przez pole skierowane na zewn ¾atrz�N; to IIp (v) = �hv; vi i w dowolnej bazie ON (e1; e2) mamy IIp (x � e1 + y � e2) =�x2�y2: Dla orientacji przeciwnej przez pole do wewn ¾atrz N; IIp (x � e1 + y � e2) =x2 + y2:
Exercise 128 Rozwa·zmy powierzchni ¾e obrotow ¾a S powsta÷¾a przez obrót krzywejz = y4 dooko÷a osi OZ: Napisac (standardow ¾a) parametryzacj ¾e globaln ¾a ' (u; v)i znalezc (z de�nicji) IIp (v) dla p = ' (u; v) : Zauwa·zyc, ·ze dla p = (0; 0; 0)IIp = 0:
65

Wyrazimy teraz drug ¾a form¾e kwadratow ¾a II powierzchni S w termiachdowolnej parametryzacji ' : U ! S we wspó÷rz¾ednych (u; v) 2 U i bazie 'ju;'jv:
Proposition 129 Dla wektora v = u0 � 'ju (u; v) + v0 � 'jv (u; v) i p = ' (u; v)zachodzi
IIp (v) = e (u; v) � (u0)2 + 2 � f (u; v) � u0 � v0 + g (u; v) � (v0)2
dla
e = hN � ';'juui; (26)
f = hN � ';'juvi;g = hN � ';'jvvi:
Wspólczynniki e; f; g nazywaj ¾a si¾e wspó÷czynnikami drugiej formy kwadra-towej II w bazie 'ju; 'jv (t.j. dla parametryzacji ').Proof.
IIp
�u0 � 'ju + v0 � 'jv
�= h� (dN)p
�u0 � 'ju + v0 � 'jv
�; u0 � 'ju + v0 � 'jvi
= �h(dN)p�'ju
�; 'jui � (u0)
2 ��h(dN)p
�'ju
�; 'jvi+ h(dN)p
�'jv
�; 'jui
�� u0 � v0 �
�h(dN)p�'jv
�; 'jvi � (v0)
2
= �h(N � ')ju 'jui � (u0)2 �
�h(N � ')ju 'jvi+ h(N � ')jv 'jui
�� u0 � v0 � h(N � ')jv 'jvi � (v
0)2:
Poniewa·z N i 'ju ('jv) s ¾a ON to hN � ';'jui = 0 = hN � ';'jvi sk ¾ad pozró·zniczkowaniu
h(N � ')ju ; 'jui+ hN � ';'juui = 0 (i)
h(N � ')jv ; 'jvi+ hN � ';'jvvi = 0 (ii)
h(N � ')jv ; 'jui+ hN � ';'juvi = 0 (iii)
h(N � ')ju ; 'jvi+ hN � ';'jvui = 0 (iv)
Z (iii) i (iv) wobec równosci pochodnych mieszanych
h(N � ')jv ; 'jui = h(N � ')ju ; 'jvi = �hN � ';'juvi = �hN � ';'jvui; (27)
co z (i) i (ii) daje tez¾e.
Exercise 130 Sprawdzic raz jeszcze z tych wzorów poprzednie cwiczenie.
66

7 Geometria zewn¾etrzna powierzchni
7.1 Krzywe na powierzchni
Niech S b¾edzie powierzchni ¾a zorientowan ¾a z odwzorowaniem Gaussa N : S !S2: Wezmy punkt p 2 S i przebieg naturalny c (s) 2 S; s 2 (�"; ") ; le·z ¾acy naS taki, ·ze c (0) = p którego moejsce s = 0 nie jest miejscem wyprostowania.Pole t =c0 jest polem wektorów stycznych jednostkowych i liczba � (p) = kt0 (0)kto krzywizna przebiegu c [nie zale·zy ona od orientacji c; tzn. dla przebiegu wprzeciwn ¾a stron¾e jest taka sama].Wektor t0 (0) nie jest na ogó÷styczny do S i rozk÷adamy go na cz¾esc styczn ¾a
t0s (0) i prostopad÷¾a [czyli tzw. normaln ¾a] t0n (0)
t0 (0) = t0s (0) + t0n (0) 2 TpS � Lin (N (p)) :
De�nition 131 Liczb ¾e �n (p) taka, ·ze
t0n (0) = �n (p) �N (p)
nazywamy krzywizn ¾a normalna przebiegu c na powierzchni S:
Krzywizna normalna oczywiscie zmienia znak przy zmianie orientacji powierzchniS (z pola N na �N) ale nie zmienia znaku przy zmiaanie orientacji przebieguc..
Lemma 132 �n = � � cos � dla � = ^ (N; t0) :
Proof.ht0; Ni = ht0s + t0n; Ni = ht0n; Ni = h�n �N;Ni = �n (28)
sk ¾ad
�n = ht0; Ni = kt0k �ht0; Nikt0k � kNk = � � cos �:
Theorem 133 �n (p) = IIp (c0 (0)) :
Proof. Oczywist ¾a równoschN � c; c0i = 0
ró·zniczkujemyh(N � c)0 ; c0i+ hN � c; c00i = 0
sk ¾ad
IIp (c0 (0)) = �h(dN)p (c
0 (0)) ; c0 (0)i = �h(N � c)0 (0) ; c0 (0)i
= hN � c (0) ; c00 (0)i = hN (p) ; t0 (0)i (28)= �n (p) :
67

Conclusion 134 (Meusnier) Krzywizna normalna �n (p) zale·zy jedynie od wek-tora stycznego do przebiegu c; tzn. wszystkie przebiegi c na zorientowanej powierzchniS maj ¾ace w punkcie p dany wektor styczny maj ¾a w tym punkcie takie same kzy-wizny normalne.
Exercise 135 Rozwa·zmy powierzchni ¾e obrotow ¾a z cwiczenia (128) z =�x2 + y2
�2:
Znalezc krzywizn ¾e normaln ¾a ze wzoru (28) przebiegu c (s) =�s � cos t; s � sin t; s4
�w miejscu s = 0 czyli punkcie (0; 0; 0) :
7.2 Krzywizny g÷ówne
Z wczesniejszych twierdzen: dla powierzchni zorientowanej S i punktu p 2 Sistnieje baza ON (e1; e2) przestrzeni stycznej TpS z÷o·zona z wektorów w÷asnychodwzorowania (dN)p : TpS ! TpS: Przy czym, je·zeli przyj ¾ac, ·ze
(dN)p (e1) = �k1 � e1; (29)
(dN)p (e2) = �k2 � e2
(czyli �k1; �k2 s ¾a wartosciami w÷asnymi odpowiadaj ¾acymi wektorom w÷asnyme1 i e2) i k1 � k2 to
IIp (e1) = k1 i IIp (e2) = k2
oraz, ·ze k1 i k2 realizuj ¾a maximum i minimum wartosci drugiej formy kwadra-towej IIp na okr¾egu jednostkowym S1 � TpS: Równowa·znie (z ostatniegotwierdzenia) k1 i k2 realizuj ¾a maximum i minimum krzywizny normalnej powierzchniS w p: W bazie (e1; e2) druga forma kwadratowa IIp ma postac
IIp (x � e1 + y � e2) = �h(dN)p (x � e1 + y � e2) ; x � e1 + y � e2i = x2 � k1 + y2 � k2:
Z tej postaci (i z wczesniejszych interpretacji) widac, ·ze�gdy k1 = k2 to wszystkie to wszystkie krzywizny normalne s ¾a jednakowe.
De�nition 136 Liczby k1 i k2 tj. max. i min. krzywizny normalnej powierzchnizorientowanej S w punkcie p nazywamy krzywiznami g÷ównymi pow. S w p:Kierunki wyznaczone przez wektory w÷asne odwzorowania (dN)p nazywami kierunk-ami g÷ównymi.
Gdy k1 6= k2 to istniej ¾a dok÷adnie dwa kierunki g÷ówne. Gdy k1 = k2 toka·zdy kierunek jest g÷ówny. Punkt p w którym k1 = k2 nazywa si¾e umbilikalny.
Exercise 137 Pokazac, ·ze na p÷aszczyznie i na sferze wszystkie kierunki s ¾ag÷ówne.
De�nition 138 Lini ¾a krzywiznow ¾a powierzchni S nazywamy przebieg regularnyc (t) le·z ¾acy na S taki, ·ze proste styczne do dowolnego jej punktu s ¾a kierunkamig÷ównymi.
68

Proposition 139 (Olinde Rodriques) Niech c (t) b ¾edzie przebiegiem regularnymklasy C1 na pow. zorientowanej S przez pole normalne N: Na to aby c by÷alini ¾a krzywiznow ¾a potrzeba i wystarcza aby istnia÷a funkcja klasy C1 taka, ·ze
(N � c)0 (t) = � (t) � c0 (t) :
Gdy � (t) jest tak ¾a funkcj ¾a, to � (t) jest krzywizn ¾a g÷ówn ¾a w kerunku c0 (t) :
Proof. Gdy c jest lini ¾a krzywiznow ¾a to (z def.) wektor c0 (t) jest wektoremw÷asnym odwzorowania (dN)p ; dla p = c (t) : St ¾ad, istnieje liczba � (t) taka,
·ze (dN)p (c0 (t)) = � (t) � c0 (t) czyli (N � c)0 (t) = � (t) � c0 (t) : G÷adkosc funkcji
� (t) wynika z równosci
� (t) =h(N � c)0 (t) ; c0 (t)i
kc0 (t)k :
Odwrotnie, gdy (N � c)0 (t) = � (t) � c0 (t) to (dN)p (c0 (t)) = � (t) � c0 (t) cooznacza, ·ze c0 (t) jest wektorem w÷asnym odwzorowania (dN)p czyli, ·ze kierunekwyznaczony przez wektor c0 (t) jest g÷ówny.
Theorem 140 (Formu÷a Eulera) Gdy k1 i k2 s ¾a krzywiznami g÷ównymi, (e1; e2)jest baz ¾a ON wektorów w÷asnych i zachodz ¾a zwi ¾azki (29) (dN)p (ei) = �ki � ei tokrzywizna normalna �n w kierunku jednostkowego wektora v = cos � �e1+sin � �e2wynosi
�n = k1 � cos2 � + k2 � sin2 �:
Proof.
�n = IIp (v) = �h(dN)p (v) ; vi= �h(dN)p (cos � � e1 + sin � � e2) ; cos � � e1 + sin � � e2i= hcos � � k1 � e1 + sin � � k2 � e2; cos � � e1 + sin � � e2i= k1 � cos2 � + k2 � sin2 �:
7.3 Krzywizna Gaussa, krzywizna srednia, klasy�kacja punk-tów powierzchni
Lemma 141 Je·zeli A : W ! W jest liniowym endomor�zmem n-wymiarowejrzeczywistej przestrzeni wektorowej W , (v1; :::vn) jest baz ¾a przestrzeni W i a =haji
ijest macierz ¾a przekszta÷cenia A a tej bazie, tzn. Avi = �ja
ji � vj ; to liczby
(a) det a;(b) tr a := a11 + :::+ a
nn /tzw. slad macierzy a;
nie zale·z ¾a od bazy (v1; :::; vn) :
69

Proof. Standard (algebra liniowa).(a) Dla bazy (w1; :::; wn) o macierzy przejscia x =
hxji
i; tj. wi = �jx
ji � vj
sk ¾ad vr = �j�x�1
�jrwj ; macierz b przekszta÷cenia A w bazie (wi) jest równa
b = x � a � x�1
Awi = A
Xk
xki � vk
!=Xk
xki �Avk =Xk;r
xki � ark � vr =Xk;r;j
xki � ark ��x�1
�jrwj :
Dlatego
bji =Xk;r
xki � ark ��x�1
�jr=�x � a � x�1
�ji;
b = x � a � x�1
det b = det�x � a � x�1
�= detx � det a � detx�1 = det a:
(b) Zauwa·zymy najpierw równosc
tr a =Xi
v�i (Avi) ;
gdzie (v�i ) jest baz ¾a dualn ¾a do bazy (vi) przestrzeni dualnej W� :
Xi
v�i (Avi) =Xi
v�i
0@Xj
aji � vj
1A =Xi;j
aji �v�i (vj) =Xi;j
aji ��ij =Xi
aii = tr a:
Dla innej bazy (wi) o macierzy przejscia x j/w macierz ¾a przejscia od bazydualnej (v�i ) do bazy dualnej (w
�i ) jest macierz transponowana
�x�1
�T: gdy
w�i = �yji � v�j to
yji = w�i (vj) = w�i
Xk
�x�1
�kjwk
!=Xk
�x�1
�kj� �ik =
�x�1
�ij=��x�1
�T�ji:
St ¾ad
Xi
w�i (Awi) =Xi
0@Xj
��x�1
�T�ji� v�j
1A A Xk
xki � vk
!!
=Xj;k
Xi
��x�1
�T�ji� xki � v�j (Avk) =
Xj;k
Xi
�x�1
�ij� xki � v�j (Avk)
=Xj;k
�x�1 � x
�kjv�j (Avk) =
Xj;k
�kj v�j (Avk) =
Xj
v�j (Avj) :
70

W/g powy·zszego twierdzenia mo·zna mówic o wyznaczniku i sladzie liniowegoendomor�zmu A :W !W:W dalszym ci ¾agu badania powierzchni S zorientowanej przez odwzorowanie
Gaussa N : S ! S2 wykorzystamy liczbowe charakterystyki endomor�zmu(dN)p : TpS ! TpS; jego wyznacznik i slad
det (dNp) ; tr (dNp) :
De�nition 142 (a) Liczb ¾e K = det (dNp) nazywamy krzywizn ¾a Gaussa powierzchniS w punkcie p;(b) liczb ¾e H = � 12 � tr (dNp) nazywamy krzywizn ¾a sredni ¾a powierzchni S w
punkcie p:
W bazie ON (e1; e2) dla której zachodz ¾a równosci (29) (dN)p (ei) = �ki � eimacierz przekszta÷cenia (dN)p jest postaci�
�k1 00 �k2
�sk ¾ad
K = k1 � k2 - iloczyn krzywizn g÷ównych,
H =1
2(k1 + k2) - srednia arytmetyczna krzywizn g÷ównych.
Lemma 143 Krzywizny g÷ówne k1; k2 spe÷niaj ¾a równanie kwadratowe
k2 � 2H � k +K = 0;
w szczególnosci wyró·znik tego równania 4H2 � 4K � 0; t.j.
H2 �K � 0;
iki = H �
pH2 �K:
Proof.
2H = k1 + k2;
ki = 2H � kj ; i 6= j:
Zatem dla i 6= j
K = kj � ki = kj � (2H � kj) = �k2j + 2H � kj
co oznacza, ·ze obie krzywizny spe÷niaj ¾a równanie k2 � 2H � k + K = 0: Jegowyró·znik jest wi¾ec nieujemny 4H2 � 4K � 0; t.j. H2 � K � 0 i ki = H �pH2 �K:
71

Z powy·zszego wynika, ·ze liczby K i H determinuj ¾a jednoznacznie krzywiznyg÷ówne k1 i k2 (o ile przyj ¾ac k1 � k2)Uzmienniaj ¾ac punkt p 2 S otrzymujemy dwie funkcje rzeczywiste
k1; k2 : S ! R:
Poniewa·z det (dN)p i tr (dNp) s ¾a funkcjami klasy C1 punktu p [wybieramy
dowolnie baz¾e stycznych pól g÷adkich w otoczeniu p i dla tych wektorów liczymymacierz (dN)p i te dwie liczby] to funkcje H i K s ¾a klasy C1: Wzory ki =
H �pH2 �K pokazuj ¾a, ·ze krzywizny g÷ówne k1 i k2 s ¾a funkcjami ci ¾ag÷ymi na
S i co wi¾ecej wsz¾edzie oprócz byc mo·ze punktów umbilikalnych (gdy k1 = k2) -równowa·znie gdy H2 �K = 0 - s ¾a funkcjami klasy C1:
De�nition 144 (Klasy�kacja punktów powierzchni zorientowanej). Punkt p 2S nazywa si ¾e1) eliptyczny gdy K > 0;2) hieperboliczny gdy K < 0;3) paraboliczny gdy K = 0 i (dN)p 6= 0;4) p÷aski gdy (dN)p = 0; wówczas k1 = k2 = 0 sk ¾ad K = 0 i
IIp = 0:
Remark 145 Klasy�kacja punktów powierzchni jest niezale·zna od wyboru ori-entacji tej powierzchni bowiem po zmianie orientacji N na �N mamy (d (�N))p =� (dN)p ; co wobec parzystosci wymiaru przestrzeni TpS daje równosc wyznacznikówdet (d (�N))p = det (dN)p czyli krzywizn Gaussa. Powy·zsz ¾a klasy�kacj ¾e mo·znarównie·z przeprowadzic dla powierzchni nieorientowalnej S; mianowicie, wystar-czy w tym celu zorientowac pewne otoczenie punktu i sprawdzic która z powy·zszychewentualnosci zachodzi dla tego kawa÷ka zorientowanej powierzchni.
Remark 146 (1) W punkcie eliptycznym krzywizna Gaussa jest dodatnia, wi ¾ecobie krzywizny g÷ówne s ¾a tego samego znaku. Zgodnie z formu÷¾a Eulera (�n =k1 � cos2 � + k2 � sin2 � w kierunku v = cos � � e1 + sin � � e2) krzywizny normalnew dowolnym kierunku s ¾a niezerowe i s ¾a tego samego znaku. Zatem, wszystkieprzebiegi przechodz ¾ace przez ten punkt maj ¾a wektor normalny t0n skierowany wt ¾e sam ¾a stron ¾e p÷aszczyzny stycznej (t0n = �n �N).W poni·zszych de�nicjach wykorzystac tylko de�nicje krzywiznyCWICZENIE. Np. na sferze ka·zdy punkt jest eliptyczny. Sfera ma sta÷¾a
dodatni ¾a krzywizn ¾e Gaussa.CWICZENIE. Na paraboloidzie z = x2 + ky2; k > 0; krzywizny g÷ówne w
punkcie (0; 0; 0) s ¾a równe �2; �2k; s ¾a wi ¾ec obie ujemne.(2) W punkcie hiperbolicznym krzywizna Gaussa jest ujemna, wi ¾ec krzywizny
g÷ówne s ¾a ró·znych znaków.CWICZENIE ! Pokazac, ·ze krzywzina Gaussa pseudosfery jest sta÷a
ujemna.(3) W punkcie parabolicznym krzywizna Gaussa jest równa 0; st ¾ad jedna z
krzywizn g÷ównych jest 0 a druga jest 6= 0:Np. wszystkie punkty na cylindrze s ¾a paraboliczne (cwiczenie).
72

(4) W punkcie sp÷aszcznia obie krzywizny g÷ówne s ¾a równe 0:P÷aszczyzna ma krzywizn ¾e Gaussa sta÷¾a równa 0:Np. na powierzchni obrotowej z = x4+ y4 punkt (0; 0; 0) jest takim punktem
(cwiczenie).
Example 147 Sklasy�kowac punkty powierzchni obrotowej powsta÷ej z obrotukrzywej z = y3 dooko÷a osi OY (narysowac najpierw powierzchni ¾e i przewidziecrezultat)/
Remark 148 W punkcie umbilikalnym (k1 = k2 = k) (dN)p (ei) = �k �ei sk ¾ad(dN)p = �k � Id: Zatem
IIp (v) = h� (dN)p (v) ; vi = hk � v; vi = k � Ip (v)
co znaczy, ·ze pierwsza i druga forma kwadratowa Ip i IIp s ¾a proporcjonalne.Odwrotnie, gdy IIp (v) = k �Ip (v) dla pewnej liczby k wówczas krzywizny g÷ówneki musza byc obie równe k (niech ei b ¾edzie baz ¾a ON dla której (dN)p (ei) =�ki � ei; wtedy dla v = vi mamy k � hei; eii = IIp (ei) = h� (dN)p (ei) ; eii = ki).
Theorem 149 Je·zeli wszystkie punkty spójnej powierzchni S s ¾a umbilikalne toalbo S � S2r (p0) albo S �p÷aszczyzna.
Dowód pomijamy. do Carmo str 155.
WYK×AD 16-18
7.4 Odwzorowanie Gaussa i jego rózniczka w dowolnychwspó÷rz¾ednych
Niech ' b¾edzie dowoln ¾a parametryzacj ¾a zorientowanej przez pole N powierzchniS zgodn ¾a z zadan ¾a orientacj ¾a (tzn. 'u � 'v = C � N dla C > 0). Wtedyodwzorowanie Gaussa N = 'u�'v
k'u�'vk: Przypomnijmy, ·ze w bazie 'ju; 'jv formy
Ip i IIp maj ¾a postac
Ip (v) = E � (u0)2 + 2 � F � u0 � v0 +G � (v0)2
IIp = e � (u0)2 + 2 � f � u0 � v0 + g � (v0)2
dla pierwszej formy (25)
E = h'ju; 'juip = 'ju 2 ;
F = h'ju; 'jvip;
G = h'jv; 'jvip = 'jv 2 ;
i dla drugiej (26)
e = hN � ';'juui;f = hN � ';'juvi;g = hN � ';'jvvi:
73

De�nition 150 Liczby
E �G� F 2 oraz e � g � f2
nazywaj ¾a si ¾e odpowiednio wyró·znikiem pierwszej i drugiej formy kwadratowejpodstawowej powierzchni S w punkcie p:
Poniewa·z liczba
E �G� F 2 = 'ju 2 � 'jv 2 � h'ju; 'jvi2 = 'ju � 'jv 2
jest (geometria analityczna - proste cwiczenie) kwadratem pola równoleg÷obokurozpi¾etego na wektorach liniowo niezale·znych 'ju i 'jv to jest dodatnia, zatemwyró·znik pierwszej formy kwadratowej jest dodatni
E �G� F 2 > 0:
Proposition 151 Wspó÷czyniki macierzy przekszta÷cenia (dN)p : TpS ! TpSw bazie ('u; 'v)
(dN)p ('u) = a11 � 'u + a21 � 'v(dN)p ('v) = a12 � 'u + a22 � 'v
równowa·znie
(N � ')ju = a11 � 'ju + a21 � 'jv (30)
(N � ')jv = a12 � 'ju + a22 � 'jv
okreslone s ¾a poprzez zwi ¾azek macierzowy��e �f�f �g
�=
�a11 a21a12 a22
���E FF G
�: (31)
Natomiast bezposrednio przez równosci
a11 =fF � eGEG� F 2 ; a21 =
eF � fEEG� F 2 ; a12 =
gF � fGEG� F 2 ; a22 =
fF � gEEG� F 2 : (32)
Proof. Wczesniej wykazlismy równosci (27)
h(N � ')jv ; 'jui = h(N � ')ju ; 'jvi = �hN � ';'juvi = �hN � ';'jvui
oraz (i) - (iv)
h(N � ')ju ; 'jui+ hN � ';'juui = 0 (i)
h(N � ')jv ; 'jvi+ hN � ';'jvvi = 0 (ii)
h(N � ')jv ; 'jui+ hN � ';'juvi = 0 (iii)
h(N � ')ju ; 'jvi+ hN � ';'jvui = 0 (iv)
74

Z postaci wspólczynników e; f; g otrzymujemy
�e = �hN � ';'juui = h(N � ')ju ; 'jui = ha11 � 'ju + a21 � 'jv; 'jui = a11 � E + a21 � F;
�f = �hN � ';'juvi = h(N � ')jv ; 'jui = ha12 � 'ju + a22 � 'jv; 'jui = a12 � E + a22 � F;
= �hN � ';'jvui = h(N � ')ju ; 'jvi = ha11 � 'ju + a21 � 'jv; 'jvi = a11 � F + a21 �G
�g = �hN � ';'jvvi = h(N � ')jv ; 'jvi = ha12 � 'ju + a22 � 'jv; 'jvi = a12 � F + a22 �G:
czyli macierzowo (31). St ¾ad te·z�a11 a21a12 a22
�=
��e �f�f �g
���E FF G
��1=
��e �f�f �g
��� G
EG�F 2 � FEG�F 2
� FEG�F 2
EEG�F 2
�=
"�eG+fFEG�F 2
eF�fEEG�F 2
�fG+gFEG�F 2
fF�gEEG�F 2
#:
De�nition 152 Równania (30) w których wspó÷czynniki aji okreslone s ¾a wzo-rami (32) nazywaj ¾a si ¾e wzorami Weingartena.
Theorem 153 (a) Krzywizna Gaussa K jest równa ilorazowi wyró·zników drugieji pierwszej formy kwadratowej
K =eg � f2EG� F 2 :
(b) Krzywizna srednia H wyra·za si ¾e wzorem
H =1
2� eG� 2fF + gE
EG� F 2 :
Proof. (a)
K = dethaji
i= det
���e �f�f �g
��� G
EG�F 2 � FEG�F 2
� FEG�F 2
EEG�F 2
��= (�1)2
�eg � f2
� EG� F 2
(EG� F 2)2
=eg � f2EG� F 2 :
(b)
H = �12� tr (dNp) = �
1
2��a11 + a
22
�= �1
2���eG+ fFEG� F 2 +
fF � gEEG� F 2
�=
1
2� eG� 2fF + gE
EG� F 2 :
75

Conclusion 154 Poniewa·z EG�F 2 > 0 to o charakterze punktu decyduje znakwyró·znika drugiej formy kwadratowej eg � f2:
Mo·zna dowiesc (pominiemy dowody), ·ze jesli p 2 S jest punktem elipty-cznym to istnieje otoczenie tego punktu le·z ¾ace ca÷kowicie po jednej stroniep÷aszczyzny stycznej. Jesli p 2 S jest punktem hiperbolicznym to dowolnieblisko p le·z ¾a punkty po obu stronach p÷aszczyzny stycznej.
Exercise 155 Obliczyc krzywizn ¾e Gaussa ró·znych punktów na torusie (zobaczycrysunkowo).
Exercise 156 Obliczyc krzywizn ¾e Gaussa ró·znych punktów powierzchni obro-towej (zobaczyc rysunkowo) z Przyk÷adu ogólnego (91) a nast ¾epnie uszczegó÷owicwynik gdy przebieg y = ' (v) > 0; z = (v) jest naturalny (wyczuc klasy�kacjerysunkowo) do Carmo 261-162.
Exercise 157 Obliczyc krzywizn ¾e Gaussa powierzchni S która jest wykresemfunkcji ró·zniczkowalnej z = h (x; y) ; (x; y) 2 U:Zastosowac rezultat dla kwadryg niezdegenerowanych (wspólczynniki a; b; c
> 0 ): - (zrobic rysunki)
Example 158 � � elipsoida, x2
a2 +y2
b2 +z2
c2 � 1 = 0; rozwa·zyc po÷ow ¾e
z = c
r�1� x2
a2 +y2
b2
�� hiperboloida jednopow÷okowa, x
2
a2 +y2
b2 �z2
c2 � 1 = 0; rozwa·zyc po÷ow ¾ez = c
qx2
a2 +y2
b2 � 1
� hiperboloida dwupow÷okowa, x2
a2 +y2
b2 �z2
c2 + 1 = 0; rozwa·zyc po÷ow ¾e
z = cq
x2
a2 +y2
b2 + 1
� paraboloida eliptyczna, z = x2
a2 +y2
b2 ;
� paraboloida hiperboliczna, z = x2
a2 �y2
b2 ; lub gdy a = b to tak·ze z = axy
� sto·zek, x2
a2 +y2
b2 �z2
c2 = 0; rozwa·zyc po÷ow ¾e z = cq
x2
a2 +y2
b2 :
Example 159 Powierzchnie obrotowe o sta÷ej krzywiznie. Rozwa·zmyparametryzacje �' (u; v) = (' (v) cosu; ' (v) sinu; (v)) ; ' (v) > 0, o naturalnejparametryzacji tworz ¾acej (' (v) ; (v)) ; t.j. ('0 (v))2+
� 0 (v)
�2= 1; (Zad 7 a-e
do Carmo str 169-170(a) K = �'
00
' ;
(b) Klasy�kacja powierzchni o krzywiznie sta÷ej +1, przecinaj ¾acych prostopa-dle os OXY :
' (v) = C cos v; (v) =
Z v
o
p1� C2 sin2 vdv; C > 0
76

(zakres zmiennosci taki, aby ca÷ka mia÷a sens), tylko gdy C = 1 mamy sfer ¾e[zatem: krzywizn ¾e sta÷¾a +1 maj ¾a nie tylko sfery!](c) Klasy�kacja powierzchni o krzywiznie sta÷ej K = �11)
' (v) = C cosh v; (v) =
Z v
0
p1� C2 sinh2 vdv;
2)
' (v) = C sinh v; (v) =
Z v
0
p1� C2 cosh2 vdv;
3)
' (v) = ev; (v) =
Z v
0
p1� e2vdv;
znalezc zakresy na v i rzuty na p÷aszczyzn ¾e OXZ.Hint (ca÷kujemy równanie z (a)(d) tylko 3) jest pseudosfer ¾a [zatem krzywizn ¾e sta÷¾a -1ma nie tylko pseudos-
fera ma !](e) jedyne obrotowe o krzywiznie K = 0 sa(1) cylindry(2) sto·zki obrotowe(3) oraz p÷aszczyzna (jak sobie wyobrazic p÷aszczyzn ¾e jako powierzchni ¾e obro-
tow ¾a?)
8 Geometria wewn¾etrzna powierzchni
8.1 Izometrie
De�nition 160 Niech S i �S b ¾ed ¾a dowolnymi powiwrzchniami. Dyfeomor�zmf : S ! �S nazywamy izometri ¾a je·zeli dla dowolnego p 2 S i w1:w2 2 TpS
hw1; w2ip = h(df)p w1; (df)p w2if(p):
Lemma 161 Dyfeomor�zm f : S ! �S jest izometri ¾a gddy zachowuje pierwsze
formy kwadratowe, tzn. Ip (w) = If(p)
�(df)p w
�; p 2 S; w 2 TpS:
Proof. "=)" Jesli f : S ! �S jest izometri ¾a to
Ip (w) = hw;wip = h(df)p w; (df)p wif(p) = If(p)
�(df)p w
�:
"(=" Jesli f zachowuje pierwsze formy kwadratowe to na mocy (23) -wyra·zanie formy dwuliniowej przez stowarzyszon ¾a form¾e kwadratow ¾a -
hw1; w2ip =1
2� (Ip (w1 + w2)� Ip (w1)� Ip (w2))
=1
2��If(p)
�(df)p (w1) + (df)p (w2)
�� If(p)
�(df)p (w1)
�� II(p)
�(df)p (w2)
��= h(df)p (w1) ; (df)p (w2)ip:
77

Proposition 162 Niech ' : U ! S i �' : U ! �S b ¾ed ¾a parametryzacjamipowierzchni S i �S takimi, ·ze wspó÷czynniki pierwszych form kwadratowych E;F;Gi �E; �F ; �G (s ¾a to funkcje na przestrzeni parametrów U) s ¾a odpowiednio sobierówne
E = �E; F = �F ; G = �G:
Wtedy dyfeomor�zmf := �' � '�1 : ' [U ]! �' [U ]
jest izometri ¾a.
Proof. Wezmy p 2 ' [U ] ; p = ' (u; v) i w 2 TpS;
w = '�(u;v) (u0; v0) = u0 � 'ju + v0 � 'jv;
Wtedy
(df)p (w) = d��' � '�1
�p
�'�(u;v) (u
0; v0)�=��' � '�1 � '
��(u;v) (u
0; v0)
= �'�(u;v) (u0; v0) = u0 � �'ju + v0 � �'jv
Poka·zemy ·ze f zachowuje pierwsze formy kwadratowe
Ip (w) = Ip
�u0 � 'ju + v0 � 'jv
�= E (u; v) � (u0)2 + 2F (u; v) � u0 � v0 +G (u; v) � (v0)2
= �E (u; v) � (u0)2 + 2 �F (u; v) � u0 � v0 + �G (u; v) � (v0)2
= If(p)
�u0 � �'ju + v0 � �'jv
�= If(p)
�(df)p (w)
�:
Example 163 Cylinder i p÷aszczyzna s ¾a lokalnie izometryczne. Rozwa·zmy cylin-der S = S1�R i p÷aszczyzn ¾e � = p+Lin (w1; w2) gdzie (w1; w2) jest baz ¾a ON.Parametryzacjami s ¾a
' (u; v) = (cosu; sinu; v) ; u 2 (0; 2�) ; v 2 R; /druga u 2 (��; �)�' (u; v) = p+ u � w1 + v � w2; u; v 2 R:
Obliczamy trywialnie wspó÷czynniki (cwiczonko) pierwszych form kwadratowychE = �E = 1; F = �F = 0; G = �G = 1 co dowodzi, ·ze f = �'�'�1 jest izometri ¾acylindra S pozbawionego jednego po÷udnika i otwartego podzbioru p÷aszczyzny �:
Exercise 164 Katenoida i helikoida s ¾a lokalnie izometryczne. HINT: zmienicparametryzacje helikoidy �' (�u; �v) = (�v � cos �u; �v � sin �u; �u) na now ¾a sk÷adaj ¾ac zdyfeomor�zmem �v = a � sinh v; �u = u: Zobaczyc plik ruchomy Helicatenoid.gif.
78

Lemma 165 Gdy f : S ! �S jest izometri ¾a, to d÷ugosc ÷uku c na S równa si ¾ed÷ugosci jego obrazu f � c na �S:
Proof.
dl (c) =
Z b
a
kc0 (t)k dt =Z b
a
qIc(t) (c0 (t))dt =
Z b
a
qIf�c(t)
�dfc(t)c0 (t)
�dt
=
Z b
a
qIf�c(t)
�(f � c)0 (t)
�dt =
Z b
a
(f � c)0 (t) dt = dl (f � c) :
Remark 166 Na spójnej powierzchni S mo·zna wprowadzic odleg÷osc punktówwzorem
d (p; q) = inf dl (c) ;
gdzie c przebiega zbiór wszystkich przebiegów ÷¾acz ¾acych p i q: Wtedy d jestmetryk ¾a i topologia wyznaczona przez t ¾e metryk ¾e jest identyczna z topologi ¾apowierzchni S indukowan ¾a z R3: Dyfeomor�zm f : S ! �S jest izometri ¾a gddyzachowuje odleg÷osc.
8.2 Twierdzenie Egregium Gaussa (Remarkable theorem;twierdzenie wyj ¾atkowe)
Niech S b¾edzie powierzchni ¾a zorientowan ¾a i ' : U ! S jej parametryzacj ¾a. Dlap 2 ' [U ] ; p = ' (u; v) ; trójka wktorów
('u (p) ; 'v (p) ; N (p))
to jest �'ju (u; v) ; 'jv (u; v) ; �N (u; v)
�gdzie �N (u; v) = N � ' (u; v) ; stanowi baz¾e przestrzeni R3: Mo·zna wi¾ec przed-stawic wektory 'juu; 'juv; 'jvv; w tej bazie:
'juu = �111 � 'ju + �211 � 'jv + L1 � �N (33)
'juv = �112 � 'ju + �212 � 'jv + L2 � �N= 'jvu = �
121 � 'ju + �221 � 'jv + L2 � �N
'jvv = �122 � 'ju + �222 � 'jv + L3 � �N
De�nition 167 �kij nazywamy symbolami Christo¤ela parametryzacji ': S ¾a tofunkcje klasy C1 na U:
Example 168 Dla plaszczyzny � = p+Lin (w1; w2) o parametryzacji ' (u; v) =p+ u � w1 + v � w2; u; v 2 R; mamy
'ju = w1; 'jv = w2; 'juu = 'juv = 'jvv = 0
wi ¾ec�kij = 0:
79

Example 169 Obliczyc wspólczynniki Christo¤ela dla powierzchni obrotowej(91) - podane s ¾a do Carmo 255.
E;F;G; e; f; g to wspólczynniki form I i II dla parametryzacji.
Theorem 170 Zachodz ¾a zwi ¾azki:(a) �112 = �
121; �
212 = �
221; - symetria w dolnych wskaznikach,
(b) L1 = e; L2 = f; L3 = g;(c)
�111 � E + �211 � F =1
2� Eju (34)
�111 � F + �211 �G = Fju �1
2� Ejv
�112 � E + �212 � F =1
2� Ejv (35)
�112F + �212 �G =
1
2�Gju
�122 � E + �222 � F = Fjv �1
2�Gju (36)
�122 � F + �222 �G =1
2�Gjv
Proof. (a) oczywiste.(b) dostajemy po wykorzystaniu wzorów (26) e = hN � ';'juui; f = hN �
';'juvi; g = hN � ';'jvvi i pomno·zeniu równan (33) skalarnie przez �N:(c) Pierwsze z równan (33 mno·zymy skalarnie przez 'ju
h'juu; 'jui = h�111 � 'ju + �211 � 'jv + L1 � �N;'jui = �111 � E + �211 � F + 0:
Z drugiej strony
Eju = h'ju; 'juiju = h'juu; 'jui+ h'ju; 'juui = 2 � h'juu; 'jui
sk ¾ad otrzymujemy pierwszy ze wzorów (34)
�111 � E + �211 � F = h'juu; 'jui =1
2Eju:
Aby dostac drugi mno·zymy skalarnie przez 'jv
h'juu; 'jvi = h�111 � 'ju + �211 � 'jv + L1 � �N;'jvi = �111 � F + �211 �G+ 0:
Z drugiej strony
Ejv = h'ju; 'juijv = h'juv; 'jui+ h'ju; 'juvi = 2 � h'ju; 'juvi;
80

Fju = h'ju; 'jviju = h'juu; 'jvi+ h'ju; 'jvui = h'juu; 'jvi+1
2Ejv
sk ¾ad
�111 � F + �211 �G = h'juu; 'jvi = Fju �1
2Ejv:
Analogicznie pokazujemy (cwiczonko) (35) i (36). Np. pierwszy ze wzorów (35)
h'juv; 'jui = h�112 � 'ju + �212 � 'jv + L2 � �N;'jui = �112 � E + �212 � F + 0
Ejv = 2 � h'juv; 'jui
�112 � E + �212 � F =1
2Ejv:
Conclusion 171 Ka·zdy z trzech uk÷adów (34), (35) i (36) ma wyznacznik g÷ównyEG�F 2 > 0 jest wi ¾ec uk÷adem Cramerowskim. Po ich rozwi ¾azaniu widzimy, ·ze�kij wyra·zaj ¾a si ¾e w terminach pierwszej formy kwadratowej powierzchni S : za po-moc ¾a jej wspó÷czynników i ich pochodnych. Tym samym, w÷asnosci powierzchniwyra·zone w terminach �kij s ¾a niezmiennikami izometrii (t.j. nale·z ¾a do geometriiwewn ¾etrznej powierzchni S).
Theorem 172 (Twierdzenie Egregium Gaussa) Krzywizna Gaussa wyra·zasi ¾e wzorem
K � ' = � 1E
��212ju � �211jv + �112 � �211 + �212 � �212 � �111 � �212 � �211 � �222
�;
(37)(z którego wynika fakt fundamentalny: krzywizna Gaussa jest poj ¾eciem geometriiwewn ¾etrznej - da si ¾e wyrazic za pomoc ¾a pierwszej formy kwadratowej !!)
Proof. Korzystaj ¾ac z wzorów Weingartena
(N � ')ju = a11 � 'ju + a21 � 'jv(N � ')jv = a12 � 'ju + a22 � 'jv
i postaci aji danych wzorami (32) oraz ze wzorów (33)
a21 =eF � fEEG� F 2 ; a22 =
fF � gEEG� F 2
przekszta÷camy równosc'juuv = 'juvu�
�111 � 'ju + �211 � 'jv + e � �N�jv=��112 � 'ju + �212 � 'jv + f � �N
�ju
�111jv � 'ju + �111 � 'juv + �211jv � 'jv + �211 � 'jvv + ejv � �N + e � �Njv= �112ju � 'ju + �112 � 'juu + �212ju � 'jv + �212 � 'jvu + fju � �N + f � �Nju
81

�111jv � 'ju + �111 ���112 � 'ju + �212 � 'jv + f � �N
�+ �211jv � 'jv + �211 �
��122 � 'ju + �222 � 'jv + g � �N
�+
+ejv � �N + e ��a12 � 'ju + a22 � 'jv
�= �112ju � 'ju + �112 �
��111 � 'ju + �211 � 'jv + e � �N
�+ �212ju � 'jv + �212 �
��112 � 'ju + �212 � 'jv + f � �N
�+
+fju � �N + f ��a11 � 'ju + a21 � 'jv
�:
Poniewa·z wektory 'ju; 'jv; �N s ¾a liniowo niezale·zne mo·zna zatem porównacwspólczynniki w ostatniej równosci przy 'jv :
�111 � �212 + �211jv + �211 � �222 + e � a22 = �112 � �211 + �212ju + �212 � �212 + f � a21
sk ¾ad
e � a22 � f � a21 = �112 � �211 +�212ju +�212 � �212 � �111 � �212 � �211jv � �211 � �222 (38)
Wykorzystuj ¾ac wy·zej przypomniane wzory Weingartena a21 =eF�fEEG�F 2 ; a22 =
fF�gEEG�F 2
e � a22 � f � a21 = e � fF � gEEG� F 2 � f �
eF � fEEG� F 2
=efF � egE � feF + f2E
EG� F 2 =�egE + f2EEG� F 2
= E � �eg + f2
EG� F 2 = �E �eg � f2EG� F 2
= �E �K
K = � 1E
�e � a22 � f � a21
�:
i wstawiaj ¾ac (38) otrzymujemy tez¾e.
Remark 173 [Cwiczonko] (a) Porównuj ¾ac wspó÷czynniki przy 'ju dostaniemyinny wzór
F �K � ' = �112ju � �111jv + �212 � �112 � �211 � �122 (39)
(b) Porównuj ¾ac wspó÷czynniki przy �N dostaniemy
ejv � fju = e � �112 + f ���212 � �111
�� g � �211 (40)
Remark 174 [Cwiczenie] Stosuj ¾ac wy·zej stosowany proces do równosci 'jvvu ='jvuv otrzymamy wzór
fjv � gju = e � �122 + f ���222 � �112
�� g � �212: (41)
Rownania (40) i (41) nazywaj ¾a si¾e równaniami Mainardiego-Codazziegoa wraz z równaniem Gaussa (37) s ¾a znane w teorii powierzchni pod nazw ¾a rów-nan zgodnosci. Naturalne jest pytanie: Czy s ¾a jakies jeszcze inne relacje
82

mi¾edzy pierwsz ¾a a drug ¾a form ¾a kwadratow ¾a które by si¾e nie wyra·za÷y za po-moc ¾a równan zgodnosci?Twierdzenie Bonneta pokazuje, ·ze nie ma. Zadanie wspó÷czynników -
funkcji - E;F;G; e; f; g na otwartym zbiorze U 0 � R2 spe÷niaj ¾acych warunkiE > 0; G > 0; EG � F 2 i warunki zgodnosci w których �kij s ¾a rozwi ¾azaniamirównan (34), (35), (36) s ¾a lokalnie (w pewnym otoczeniu U zadanego punktu p 2U 0) wspó÷czynnikami pierwszej i drugiej formy kwadratowej pewnej powierzchnijednoznacznie wyznaczonej z dok÷adnosci ¾a do obrotu i przesuni¾ecia [czyli tzw.ruchu sztywnego, albo inaczej izometrii].
8.3 Pochodna kowariantna i przeniesienie równoleg÷e
De�niujemy bardzo wa·zny obiekt geometrii ró·zniczkowej: pochodn ¾a kowari-antn ¾a pola wektorowego stycznego do powierzchni w kierunku wektora tak·zestycznego do powierzchni.Niech S b¾edzie dowoln ¾a powierzchni ¾a, p 2 S jej punktem,W dowolnym g÷ad-
kim polem wektorowym na S stycznym do S okreslonym w otwartym otoczeniupunktu p: Dla wektora v 2 TpS wybierzmy dowolnie przebieg c : (�"; ") ! Staki, ·ze c (0) = p oraz c0 (0) = v: De�niujemy pole wektorowe wzd÷u·z przebieguc wyznaczone przez W wzorem
~W (t) =W (c (t)) 2 Tc(t)S; t 2 (�"; ") :
Pole to traktujemy jak funkcj¾e ~W : (�"; ") ! R3: Jest ona klasy C1: Jegopochodna ~W 0 (t) 2 R3 nie musi byc wektorem stycznym do powierzchni S:
De�nition 175 Pochodn ¾a kowariantn ¾a pola W w kierunku wektora v nazy-wamy wektor oznaczany symbolem
rvW 2 TpS
okreslony jako rzut ortogonalny na p÷aszczyzn ¾e styczna TpS wektora d ~Wdt jt=0 (=
~W 0 (0))
rvW = rzut
d ~W
dt jt=0
!:
Poka·zemy, ·ze rvW nie zale·zy od wyboru pomocniczego przebiegu c a pozatym, ·ze jest to poj¾ecie geometrii wewn¾etrznej (wyra·za si¾e za pomoc ¾a wspó÷czyn-ników Christo¤ela a st ¾ad za pomoc ¾a wspó÷czynników pierwszej formy kwadra-towej.
Theorem 176 Niech ' b ¾edzie parametryzacj ¾a S wokó÷p zas c (t) = ' (u (t) ; v (t)) ;t 2 (�"; ") : Za÷ó·zmy, ·ze pole ~W ma w bazie 'ju; 'jv wspó÷rz ¾edne a i b; t.j.
~W (t) = a (t) � 'ju (u (t) ; v (t)) + b (t) � 'jv (u (t) ; v (t)) ; t 2 (�"; ") :
83

Wtedy
rvW =�a0 + a �
��111 � u0 + �112 � v0
�+ b �
��112 � u0 + �122 � v0
��� 'ju +(42)
+�b0 + a �
��211 � u0 + �212 � v0
�+ b �
��212 � u0 + �222 � v0
��� 'jv
gdzie a; b; pochodne a0; b0; u0; v0 s ¾a obliczone w punkcie t = 0 zas �kij w punkcie(u (0) ; v (0)) :
Proof.
d ~W
dt= a0 � 'ju + a �
�'juu � u0 + 'juv � v0
�+ b0 � 'jv + b �
�'jvu � u0 + 'jvv � v0
�:
Stojemy wzory (33) z pomini¾eciem sk÷adników normalnych
'juu = �111 � 'ju + �211 � 'jv + :::'juv = 'jvu = �
112 � 'ju + �212 � 'jv + :::
'jvv = �122 � 'ju + �222 � 'jv + :::
i dostajemy (proste rachunki) tez¾e
rvW = a0 � 'ju + a ����111 � 'ju + �211 � 'jv
�� u0 +
��112 � 'ju + �212 � 'jv
�� v0�+
+b0 � 'jv + b ����112 � 'ju + �212 � 'jv
�� u0 +
��122 � 'ju + �222 � 'jv
�� v0�
=�a0 + a �
��111 � u0 + �112 � v0
�+ b �
��112 � u0 + �122 � v0
�)�� 'ju +
+�b0 + a �
��211 � u0 + �212 � v0
�+ b �
��212 � u0 + �222 � v0
��� 'jv:
Conclusion 177 Pochodna kowariantna rvW nie zale·zy od wyboru pomoc-niczego przebiegu c i lokalnej orientacji powierzchni S wokó÷punktu p: Do-datkowo widac ze wzoru (42), ·ze pochodna kowariantna jest poj ¾eciem geometriiwewn ¾etrznej powierzchni.
Example 178 W szczególnosci wybieraj ¾ac jako przebiegi c ÷uki linii wspó÷rz ¾ed-nych (np. dla v = 'u (' (u0; v0)) bierzemy c (t) = ' (t+ u0; v0) ; u (t) = t+ u0;v (t) = v0) mamy dla pól 'u i 'v (np. dla W = 'u mamy ~W (t) = 1 �'ju (t+ u0; v0) + 0 � 'jv (t+ u0; v0) ; t 2 (�"; ") ) otrzymujemy
r'u'u = �111 � '�1 � 'u + �211 � '�1 � 'v;r'u'v = �112 � '�1 � 'u + �212 � '�1 � 'v;r'v'v = �122 � '�1 � 'u + �222 � '�1 � 'v;
(sk÷adanie �kij �'�1 jest dlatego, ·ze pola 'u; 'v s ¾a na powierzchni zas wspó÷czyn-niki Christo¤ela s ¾a tutaj na przestrzeni parametrów).
84

(Uwaga: gdyby zmienic oznaczenia zmiennych (u; v) po których okreslamypola po wspó÷rz ¾ednych na liczby (1; 2) wówczas by÷oby po prostu
r'i'j =Xk
�kij � '�1 � 'k )
Example 179 Na p÷aszczyznie � = p0+Lin (w1; w2) dla pola wektorowego sty-cznego W = a�w1+b�w2 (a; b - funkcje g÷adkie na S) i wektora v 2 Tp� zachodziwzór (wprost na mocy (42) lub bezposrednio z de�nicji /proste cwiczonko)
rvW = a0jv � w1 + b0jv � w2:
WYK×AD 19-21
Spójrzmy na operator rXW , wzgl¾edem X zale·zy w danym punkcie p odwartosci pola X (p) ; (rXW ) (p) = rX(p)W; zatem jest to tensor wzgl¾edem X
rfXW = f � rXW; f 2 C1 (S) :
A co wzgl¾edem W? czyli jak wyrazic rX (fW ) za pomoc ¾a rXW oraz f ?Ustalamy punkt p 2 S i niech v = X (p) : Bierzemy dowolny przebieg c stycznyw 0 do wektora v; Wtedy gfW (t) = f � c (t) � a (t) � 'ju (u (t) ; v (t)) + f � c (t) �b (t) � 'jv (u (t) ; v (t)) i stosujemy wzór na rvW z poprzedniego twierdzenia
rvW =�a0 + a �
��111 � u0 + �112 � v0
�+ b �
��112 � u0 + �122 � v0
��� 'ju +
+�b0 + a �
��211 � u0 + �212 � v0
�+ b �
��212 � u0 + �222 � v0
��� 'jv
i otrzymujemy
rv (fW ) =
�d
dt j0(f � c (t) � a (t)) + f � c (0) � a (0) � (:::) + f � c (0) � b (0) � (:::)
�� 'ju +
+
�d
dt j0(f � c (t) � b (t)) + f � c (0) � a (0) � (:::) + f � c (0) � b (0) � (:::)
�� 'jv
=d
dt j0(f � c (t)) � a (0) � 'ju + f (p) � a0 (0) � 'ju +
d
dt j0(f � c (t)) � b (0) � 'jv + f (p) � b0 (0) � 'jv
+f (p) � a (0) � (:::) + f (p) � b (0) � (:::) � 'ju ++f (p) � a (0) � (:::) + f (p) � b (0) � (:::) � 'jv
=d
dt j0(f � c (t)) �
ha (0) � 'ju + b (0) � 'jv
i+ f (p) � rvW
= dfp (c0 (0)) �W (p) + f (p) � rvW
= v (f) �W (p) + f (p) � rvW
rv (fW ) = v (f) �W (p) + f (p) � rvW:Reasumuj ¾ac operatorrXW na polach stycznych do powierzchni ma nast¾epuj ¾acew÷asnosci
rfXW = f � rXW;rX (fW ) = X (f) �W + f � rXW
85

Ka·zdy taki operator nazywa si¾e pochodn ¾a kowariantn ¾a w wi ¾azce stycznej TS:Uogólnia si¾e go nan pochodn ¾a kowariantn ¾a w dowolnej wi ¾azce wektorowej nadpowierzchni ¾a S (czy dowoln ¾a rozmaitosci ¾a M).W dalszym ci ¾agu paragrafu przebiegi b ¾ed ¾a okreslone na domkni¾etych przedzi-
a÷ach.
De�nition 180 Polem wektorowym na powierzchni S wzd÷u·z przebiegu c : [a; b]!S nazywamy przyporz ¾adkowanie
W =�[a; b] 3 t 7�!W (t) 2 Tc(t)S � R3
�:
Pole W nazywamy klasy C1 je·zeli jako odwzorowanie W : [a; b]! R3 jest klasyC1 co jest równowa·zne temu, ·ze jego wspó÷rz ¾edne w dowolnej parametryzacjipowierzchni S s ¾a klasy C1:
Przyk÷adem pola g÷adkiego na S wzd÷u·z przebiegu c jest pole styczneW = c0
(a tak·ze - dla przebiegu regularnego - trzy pola z trójscianu Frenata t; n; b).
De�nition 181 Pochodn ¾a kowariantn ¾a polaW wzd÷u·z przebiegu c na powierzchniS nazywamy rzut ortogonalny pola dW
dt na p÷aszczyzn ¾e styczn ¾a,
rWdt
= rzut
�dW
dt
�:
Jesli W (t) = a (t) � 'ju + b (t) � 'jv; to rWdt wyra·za si¾e oczywiscie wzorem
(42).W geometrii analitycznej wa·zn ¾a rol¾e odgrywa przesuwanie wektora zaczepi-
onego w danym punkcie do innego punktu. Otrzymany wektor nazywa÷si¾erówny (równowa·zny) do wyjsciowego. Klasa abstracji tej relacji to wektor swo-bodny. Jak jednak "przesun ¾ac" równolegle wektor styczny do powierzchni takaby dalej by÷styczny do powierzchni i aby to nowe poj¾ecie uogólnia÷o przy-padek p÷aski "zwyczajnego przesuwania wektora po linijce". Zobaczmy, ·ze nap÷aszczyznie � = p0 + Lin (w1; w2) pole wektorowe styczne do powierzchniW (p) = a (p) � w1 + b (p) � w2; p 2 �; ma wartosci rownoleg÷e w ró·znych punk-tach w zwyk÷ym sensie [czyli równe wspó÷rz¾edne] gdy funkcje a i b s ¾a sta÷e,tzn. gdy ich pochodne s ¾a zerowe, czyli gdy dW
dt = 0. Poza tym pole dWdt dalej
jest styczne do powierzchni, czego nie mo·zna powiedziec o polu na dowolnejpowierzchni, ale rzut ortogonalny i pochodna kowariantna rW
dt sprowadzaj ¾a polez powrotem do pola stycznego. W zwi ¾azku z tym w÷asnie wykorzystanie pochod-nej kowariantnej prowadzi do nowego fundamentalnego poj¾ecia geometrycznegona powierzchni: do równoleg÷ego przesuwania wektora wzd÷u·z przebiegu w/gponi·zszej de�nicji.
De�nition 182 Pole wektoroweW wzd÷u·z przebiegu c na powierzchni S nazywasi ¾e polem wektorów równoleg÷ych (lub polem r-sta÷ym wzd÷u·z przebiegu) je·zeli
rWdt
= 0
(co oznacza, ·ze wektory dWdt jt s ¾a prostopad÷e do powierzchni).
86

Jak zauwa·zylismy, na p÷aszczyznie � = p0+Lin (w1; w2) pole W (t) = a (t) �w1 + b (t) � w2 wzd÷u·z dowolnego przebiegu c (t) jest r-sta÷e gddy funkcje a i bs ¾a sta÷e.Okazuje si¾e jednak, ·ze przesuwanie równoleg÷e z jednego punktu do drugiego
wzd÷u·z przebiegu ÷¾acz ¾acego te punkty zale·zy na ogó÷od wyboru przebiegu(przyk÷ady pózniej). [Na p÷aszczyznie oczywiscie nie zale·zy].
Proposition 183 Je·zeli V iW s ¾a polami r-sta÷ymi wzd÷u·z przebiegu c : [a; b]!S to
hV (t) ;W (t)i = const:
W szczególnosci, (bior ¾ac W = V ) pole V r-sta÷e ma sta÷¾a d÷ugosc kV (t)k =const: Jesli pola V i W s ¾a niezerowe i r-sta÷e to ^ (V (t) ;W (t)) = const:
Proof. Niech pola V i W b¾eda r-sta÷e. Skoro rzut ortogonalny dWdt jt na
p÷aszczyzn¾e Tc(t)S jest równy zeru to poledWdt jest prostopad÷e do S: St ¾ad dla
pól V i W mamy rownosc hV (t) ; dWdt jti = 0: Analogicznie hdVdt jt;W (t)i = 0:
Otrzymujemy st ¾ad
d
dthV;W i = hdV
dt;W i+ hV; dW
dti = 0
co implikuje sta÷osc funkcji hV;W i; hV (t) ;W (t)i = const: Rozpatruj ¾ac W = V
widzimy, ·ze hV (t) ; V (t)i = kV (t)k2 = const co oznacza, ·ze wektory pola r-sta÷ego maj ¾a sta÷¾a d÷ugosc. Poza tym gdy pola sa niezerowe, to
cos^ (V (t) ;W (t)) =hV (t) ;W (t)ikV (t)k � kW (t)k = const:
Example 184 (pola r-sta÷e na sferze). Pole jednostkowe W styczne do ko÷awielkiego na sferze jest r-sta÷e.Istotnie: niech c b ¾edzie parametryzacj ¾a naturalna ko÷a wielkiego, wówczas
W = c0 = t (po uzgodnieniu orientacji). Poniewa·z kWk = 1 to W?W 0: Zdrugiej strony ko÷o wielkie jest krzyw ¾a p÷ask ¾a wi ¾ecW 0 = t0 le·zy w jej p÷aszczyznie,co wi ¾ecej, jest skierowany do srodka ko÷a a tym samym jest prostopad÷y do sfery.Jej rzut ortogonalny na p÷aszczyzn ¾e styczn ¾a jest wi ¾ec wektorem zerowym co im-plikuje relacje rW
dt = 0; czyli, ·ze wektory jednostkowe styczne do ko÷a wielkiegos ¾a równoleg÷e (na sferze).
De�nition 185 Przesuni ¾eciem równoleg÷ym wektora v 2 TpS wzd÷u·z przebieguc : [a; b]! S takiego, ·ze c (t0) = p nazywamy pole wektorowe W wzd÷u·z c którejest r-sta÷e.
Poni·zsze twierdzenie jest wnioskiem z rownosci (42).
Theorem 186 Przesuni ¾ecie równoleg÷e wektora v 2 TpS wzd÷u·z przebiegu c :[a; b] ! S takiego, ·ze c (t0) = p i le·zacego w otoczeniu wspó÷rz ¾ednosciowymjednej parametryzacji istnieje i jest wyznaczone jednoznacznie.
87

Proof. Je·zeli przebieg c le·zy w otoczeniu wspó÷rz¾ednosciowym jednej parame-tryzacji to wspó÷rz¾edne pola r-sta÷ego spe÷niaj ¾a uk÷ad równan ró·zniczkowychzwyczajnych
a0 = ��a ���111 � u0 + �112 � v0
�+ b �
��112 � u0 + �122 � v0
��(43)
b0 = ��a ���211 � u0 + �212 � v0
�+ b �
��212 � u0 + �222 � v0
��wraz z odpowiednim warunkiem pocz ¾atkowym. Istnienie i jednoznacznosc prze-niesienia równoleg÷ego wynika z odpowiedniego twierdzenia z teorii równanró·zniczkowych.
Remark 187 Przesuni ¾ecie rownoleg÷e wzd÷u·z przebiegu c : [a; b] ! S de�niujeodwzorowanie przestrzeni stycznych (które jest izometri ¾a)
Pc : Tc(a)S ! Tc(b)S
okreslone nast ¾epuj ¾aco: bierzemy v 2 Tc(a)S i pole Wv równe v w a które jestr-sta÷e. Jest jednoznacznie okreslone, wi ¾ec wartosc Wv (b) 2 Tc(b)S jest do-brze okreslona, k÷adziemy Pc (v) = Wv (b) : Z wczesniejszego Stwierdzenia �czachowuje iloczyn skalarny, zatem jest izometri ¾a.
Lemma 188 Je·zeli c : [a; b] ! S jest przebiegiem na powierzchni S to prze-niesienie równoleg÷e dowolnego wektora v 2 Tc(a)S wzd÷u·z c nie zale·zy od wyboruparametryzacji przebiegu ró·zni ¾acej si ¾e o dyfeomor�zm.
Proof. Wezmy inn ¾a parametryzacj¾e d : [c; d]! S tego przebiegu ró·zni ¾ac ¾a si¾e odyfeomor�zm q : [c; d] ! [a; b] ; tzn. c � q = d: Niech W b¾edzie przeniesieniemrównoleg÷ym wektora v 2 Tc(a)S wzd÷u·z c; tzn. rWdt =rzut
�dWdt
�= 0: Poka·zemy,
·ze W � q jest przesuni¾eciem równoleg÷ym wzd÷u·z d :
r (W � q)dt
= rzut�d (W � q)
dt
�= rzut
�dW
dt� q � dq
dt
�= rzut
�dW
dt� q��dqdt= 0:
8.4 Geodezyjne
Linia prosta na p÷aszczyznie charakteryzuje si¾e tym, ·ze wektor styczny do niejw jednym punkcie po przesuni¾eciu równoleg÷ym pozostaje nadal stycznym dotej prostej. Ta idea ma zastosowanie do powierzchni w kwestii zde�niowania"linii prostej" na dowolnej powierzchni: wektor styczny do linii któr ¾a chcemyuznac za "prost ¾a" w geometrii powierzchni powinien po równoleg÷ym przesuni¾e-ciu wzd÷u·z tej "linii prostej" pozostac stycznym. Takie linie proste nazywacb¾edziemy geodezyjnymi na powierzchni.
De�nition 189 Geodezyjn ¾a na powierzchni S nazywamy przebieg regularny :(a; b) ! S (jest wi ¾ec ró·zny od sta÷ego) dla którego pole styczne 0 jest polemr-sta÷ym, t.j. r 0
dt = 0:
88

Example 190 Na p÷aszczyznie jedynymi geodezyjnymi s ¾a linie proste w zwyk÷ymsensie x = a1 + t � v1; y = a2 + t � v2:Na sferze ko÷a wielkie s ¾a geodezyjnymi (i innych nie ma) - ni·zej b ¾edzie
pokazana jednoznacznosc geodezyjnej przechodz ¾acej przez dany punkt i stycznejdo danego wektora, co w÷asnie pokazuje brak innych geodezyjnych na sferze.Przez dwa antypodyczne punkty przechodzi nieskonczenie wiele geodezyjnych.
Remark 191 Poniewa·z pochodna kowariantna pola jest poj ¾eciem geometrii wewn ¾etrznejto dla izometrii f : S ! �S przebieg c : (a; b)! S jest geodezyjn ¾a na S gddy f �cjest geodezyjn ¾a na �S:
Exercise 192 Na cylindrze x2 + y2 = 1; z 2 R; geodezyjnymi (jedynymi) s ¾a(a) okr ¾egi x2 + y2 = 1; z = z0 (prostopad÷e do osi obrotu),(b) linie srubowe x = cos (a � u+ a0) ; y = sin (a � u+ a0) ; z = b � u+ b0:Hint: rozwin ¾ac izometrycznie cylinder na p÷aszczyzn ¾e (do Carmo 247-248)Zauwa·zyc, ·ze przez dowolne dwa punkty cylindra nie le·z ¾ace na kole prostopad÷ym
do osi OZ przechodzi nieskonczenie wiele geodezyjnych.
Remark 193 Na powierzchni S geodezyjna mo·ze miec samoprzecicia i to wnieskonczenie wielu miejscach.
Remark 194 Udowadnia si ¾e, choc nie jest to trywialne, ·ze geodezyjna lokalnie(a wi ¾ec dla punktów blisko le·z ¾acych) ma najmniejsz ¾a d÷ugosc z wszystkich liniina S ÷¾acz ¾acych te dane punkty. Udowadnia si ¾e równie·z (ogólniej w geometriiRiemannowskiej) ·ze ka·zdy punkt ma otoczenie takie, ·ze ka·zde dwa punkty ztego otoczenia mo·zna po÷¾aczyc jedyn ¾a geodezyjn ¾a zawart ¾a w tym otoczeniu irealizuje ta geodezyjna odleg÷osc punktów, t.j. jest najkrutsz ¾a z krzywych ÷¾acz ¾a-cych na powierzchni te dwa punkty. W szczególnosci ka·zde trzy punkty z tegootoczenia nie le·z ¾ace na jednej geodezyjnej de�niuj ¾a trójk ¾at (geodezyjny) o bokachgeodezyjnych. K ¾aty wewn ¾etrzne takiego trójk ¾ata s ¾a mniejsze ni·z � i suma d÷u-gosci dwu boków jest wi ¾eksza od boku trzeciego. Takie trójkaty b ¾edziemy nazywacma÷ymi. Istniej ¾a na powierzchniach trójk ¾aty geodezyjne "nie ma÷e" w którychk ¾aty wewn ¾etrzne mog ¾a byc wi ¾eksze ni·z � i suma d÷ugosci dwu boków mo·ze bycmniejsza ni·z trzeci bok. Np na sferze: bierzemy dwa krótkie odcinki kó÷wielkichwychodz ¾ace z jednego punktu a nast ¾epnie konce tych odcinków ÷¾aczymy d÷u·zszymz odcinków ko÷a wielkiego przechodz ¾acego przez te konce.
Przedstawimy teraz równanie ró·zniczkowe geodezyjnej w danej parametryza-cji ' : U ! S powierzchni S: Niech c : (�"; ") ! S b¾edzie geodezyjn ¾a za-wart ¾a w Im' i niech c ma równania w uk÷adzie (u; v) postaci (u (t) ; v (t)) , tzn.c (t) = ' (u (t) ; v (t)) : Wówczas
c0 (t) = 'ju (u (t) ; v (t)) �u0 (t)+'jv (u (t) ; v (t)) � v0 (t) = 'ju �u0 (t)+'jv � v0 (t) :
Wstawiaj ¾ac a = u0 i b = v0 do równan (43) ró·zniczkowych pola r-sta÷ego
a0 = ��a ���111 � u0 + �112 � v0
�+ b �
��112 � u0 + �122 � v0
��b0 = �
�a ���211 � u0 + �212 � v0
�+ b �
��212 � u0 + �222 � v0
��89

otrzymujemy uk÷ad równan rózniczkowych
u00 = ��111 � (u0)2 � 2�112 � u0 � v0 � �122 � (v0)
2
v00 = ��211 � (u0)2 � 2�212 � u0 � v0 � �222 � (v0)
2:
Z teorii równan rózniczkowych (Tw. o istnieniu i jednoznacznosci) otrzymu-jemy wa·zny wniosek (rozwa·zamy warunki pocz ¾atkowe (u (0) ; v (0)) = (u0; v0) i(u0 (0) ; v0 (0)) = (u00; v
00) - równowa·znie punkt p = c (0) = ' (u0; v0) ; i wektor
styczny w0 = c0 (0) = 'ju � u00 + 'jv � v00)
Theorem 195 Dla danego punktu p 2 S i wektora w0 2 TpS, w 6= 0, istnieje" > 0 i jedyna sparametryzowana geodezyjna c : (�"; ")! S taka, ·ze c (0) = p ic0 (0) = w:
Example 196 Korzystaj ¾ac z obliczonych wspó÷czynników Christo¤ela powierzchniobrotowej znalezc równanie ró·zniczkowe geodezyjnej na powierzchni obrotowej -do Carmo 255 - a nast ¾epnie znalezc geodezyjne zak÷adaj ¾ac ·ze tworz ¾aca powierzchniobrotowej ma parametr naturalny: Najpier pokazac, ·ze po÷udniki s ¾a geodezyjnymi,b) znalezc równole·zniki które s ¾a geodezyjnymi (narysowac), c) [ciut trudniejsze]znalezc równanie pozosta÷ych geodezyjnych [nie po÷udników i nie równole·zników]- równanie (6) do Carmo strona 258. Czy równanie Clairaut�s dzia÷a w dwiestrony? (jesli opisuje równole·znik to nie, je·zeli nierównole·znik to tak)
Example 197 Znalezc geodezyjne na paraboloidzie z = x2 + y2 - do Carmo258.
Example 198 ?? A jak na pseudosferze wygl ¾adaj ¾a geodezyjne, nawet do Carmonie zrobi÷tego.
Example 199 �) Zadanie 18 strona 262 do Carmo (geodezyjna d ¾a·zy do równole·znika).
WYK×AD 22-23
8.5 Krzywizna geodezyjna
Krzywizna geodezyjna jest analogonem krzywizny zorientowanej krzywej p÷ask-iej.
Lemma 200 Je·zeli W jest jednostkowym polem wzd÷u·z przebiegu c na zorien-towanej pzez pole normalne N powierzchni S; to
rWdtkN �W:
Proof. Rozk÷adamy dWdt na cz¾esc normaln ¾a i styczn ¾a
dW
dt= A �N +
rWdt
:
90

Skoro kWk = 1 to W ? dWdt ; zatem
0 = hdWdt
;W i = hA �N +rWdt
;W i = A � hN;W i+ hrWdt
;W i = hrWdt
;W i
co oznacza, ·ze rWdt ? W: Jednoczesnie, rWdt ? N sk ¾ad teza rW
dt kN �W:
De�nition 201 Dla pola jednostkowegoW wzd÷u·z przebiegu c na zorientowanejpowierzchni S liczb ¾e
�rWdt
�tak ¾a, ·ze
rWdt
=
�rWdt
�� (N �W )
nazywamy algebraiczn ¾a wartosci ¾a pochodnej kowariantnej pola W:
Oczywiscie rWdt = 0 gddy
�rWdt
�= 0:
Lemma 202 �rWdt
�= hdW
dt;N �W i:
Proof. Skoro kNk = 1 i kWk = 1 oraz N ? W to kN �Wk = 1; zatem
hdWdt
;N�W i = hA�N+rWdt
;N�W i = A�hN;N�W i+h�rWdt
��(N �W ) ; N�W i =
�rWdt
��1:
Liczba�rWdt
�zmienia znak przy zmianie orientacji powierzchni S:
De�nition 203 Krzywizn ¾a geodezyjn ¾a �g przebiegu naturalnego c na na zorien-towanej powierzchni S nazywamy algebraiczn ¾a wartosc pochodnej kowariantnejpola jednostkowego W = c0; t.j.
�g =
�rc0ds
�:
Lemma 204 Niech t0 = t0s + t0n b ¾edzie rozk÷adem wektora t0 na cz ¾esc styczn ¾a i
normaln ¾a, gdzie t =c0 dla przebiegu naturalnego. Wtedy(a) rc0
ds = t0s;
(b) j�gj = kt0sk :
Proof. (a)
rc0ds
= rzut�dc0
ds
�= rzut (t0) = rzut (t0s + t
0n) = t
0s;
(b)
t0s =rc0ds
=
�rc0ds
�� (N � c0) = �g � (N � t)
kt0sk = j�gj � kN � tk = j�gj
91

Exercise 205 Krzywizna geodezyjna przebiegu zmienia znak si ¾e po zmianie ori-entacji przebiegu (lub orientacji powierzchni).
Remark 206 Krzywizna geodezyjna przebiegu jest uogólnieniem krzywizny zori-entowanej przebiegu p÷askiego. Istotnie, jesli
�n jest polem wzd÷u·z p÷askiego prze-
biegu naturalnego c (s) normalnym do t =c0 i takim, ·ze�t;�n�jest baz ¾a ON
dodatni ¾a to liczba � taka, ·ze t0 = � � �n nazywana by÷a krzywizn ¾a zorientowan ¾aprzebiegu c: Trójka wektorów
�t;�n; e3
�jest baz ¾a ON dodatni ¾a w R3 i
�n = e3� t;
zatem dla W = c0 i N = e3 mamy
�g =
�rc0ds
�= hdW
ds;N �W i = hdc
0
ds;N � c0i
= hc00; e3 � ti = ht0;�ni = �:
Lemma 207 Zwi ¾azek mi ¾edzy krzywizn ¾a, krzywizn ¾a normaln ¾a i krzywizn ¾a geo-dezyjn ¾a wyra·zony jest w równosci
�2 = �2n + �2g:
Proof. Przypomnijmy de�nicje krzywizny normalnej: rozk÷adamy wektor t0 nacz¾esc styczn ¾a i normaln ¾a t0 = t0s + t
0n i krzywizna normalna zde�niowana jest
równosci ¾a t0n = �n �N: St ¾ad skoro t0s i t0n s ¾a prostopad÷e to z Tw Pitagorasa
�2 = kt0k2 = kt0nk2+ kt0sk
2= �2n + �
2g:
Exercise 208 Obliczyc krzywizn ¾e goedezyjn ¾a równole·znika na sferze. (Odp.�g = cot').
De�nition 209 (K ¾at zorientowany mi ¾edzy polami wektorowymi wzd÷u·z prze-biegów). Niech V;W : [c; d] ! R3 b ¾ed ¾a jednostkowymi polami wektorowymiwzd÷u·z przebiegu c na zorientowanej powierzchni S (tzn. stycznymi do S):Okreslamy pole ~V : [c; d] ! S wzorem ~V = N � c � V (jest to pole takie,
·ze uk÷ad wektorów�V (t) ; ~V (t)
�nale·zy do orientacji Tc(t)S - bowiem zgodnie
z lematem o iloczynach wektorowych w ci ¾agu jednostkowych pól prostopad÷ych�V (t) ; ~V (t) ; N (c (t)) ; V (t) ; ~V (t) ; :::
�iloczyn dwu sasi ¾ednich daje pole nast ¾epne).
K ¾atem zorientowanym od V (t) do W (t) nazywamy liczb ¾e (t) taka, ·ze gdy
W (t) = a (t) � V (t) + b (t) � ~V (t) (44)
to cos (t) = a (t) i sin (t) = b (t) : Liczba (t) dla danego parametru tjest wyznaczona jednoznacznie z dok÷adnosci ¾a do wielokrotnosci 2�: Oczywisciea2 (t) + b2 (t) = 1:
92

Dla danych pól V i W szukamy funkcji ci ¾ag÷ej : [c; d] ! R takiej, ·ze dlaka·zdego t 2 [c; d] (t) jest k ¾atem zorientowanym od V (t) do W (t) : Funkcjetak ¾a oznaczamy ^ (V;W ) : Jej istnienie stwierdza i podaje konstrukcje poni·zszyLemat.
Lemma 210 Niech dane b¾ed ¾a dwie funkcje a; b : [c; d] ! R klasy C1 takie, ·zea2 (t) + b2 (t) = 1: Ustalmy t0 2 [c; d] i 0 niech b¾edzie liczb ¾a tak ¾a, ·ze a (t0) =cos 0 i b (t0) = sin 0: Wówczas funkcja
(t) =
Z t
t0
(a (u) � b0 (u)� b (u) � a0 (u)) du + 0; t 2 [c; d] ;
jest klasy C1 i spe÷nia równosci
cos (t) = a (t) i sin (t) = b (t) ; (t0) = 0: (45)
Gdy a i b spe÷niaj ¾a (44) to = ^ (V;W ) :
Proof. Funkcja spe÷nia (45) gddy
(a (t)� cos (t))2 + (b (t)� sin (t))2 = 0:
Ale lewa strona tej równosci jest równa
a2 � 2a cos + cos2 + b2 � 2b sin + sin2 = 2 (1� a cos � b sin )
wi¾ec zachodzi gddy
A (t) := a (t) � cos (t) + b (t) � sin (t) = 1:
Wobec faktu, ·ze pochodna górnej granicy ca÷kowania jest funkcj ¾a podca÷kow ¾aoraz ró·zniczkuj ¾ac równosc a2 (t) + b2 (t) = 1 otrzymujemy zwi ¾azki
0 = a � b0 � b � a0 oraz a � a0 + b � b0 = 0
z których dostajemy
A0 (t) = a0 � cos � a � sin � 0 + b0 � sin + b � cos � 0
= a0 � cos + b0 � sin � (a � sin ) � (a � b0 � b � a0) + b � cos � (a � b0 � b � a0)= a0 � cos + b0 � sin � a2 � b0 � sin + ab � a0 � sin + ba � b0 � cos � b2 � a0 � cos = a0 � cos + b0 � sin � a2 � b0 � sin � b2 � b0 � sin � a2 � a0 � cos � b2 � a0 � cos = a0 � cos + b0 � sin � b0 � sin �
�a2 + b2
�� a0 � cos �
�a2 + b2
�= 0:
Zatem A (t) = const a poniewa·z w miejscu t0 jest równa 1
A (t0) = a (t0) � cos (t0) + b (t0) � sin (t0) = cos2 (t0) + sin2 (t0) = 1
to A (t) = 1:
93

Proposition 211 Niech V;W : [c; d] ! S b ¾eda dwoma jednostkowymi polamiwektorowymi wzd÷u·z naturalnego przebiegu c na zorientowanej powierzchni S:Wówczas ró·znica wartosci algebraicznych pochodnych kowariantnych pól W i Vwynosi �
rWdt
���rVdt
�=d
dt
gdzie = ^ (V;W ) jest k ¾atem zorientowanym od pola V do W:
Proof. Wezmy ~V = N � c� V i ~W = N � c�W: WówczasW = cos � V + sin � ~V
zas (skoro w ci ¾agu�V (t) ; ~V (t) :N (c (t)) ; V (t) ; ~V (t) ; :::
�iloczyn dwu sasi¾ed-
nich daje pole nast¾epne to N � c� V = ~V i N � c� ~V = �V )
~W = N � c�W = N � c��cos � V + sin � ~V
�= cos � ~V � sin � V:
W konsekwencji
dW
dt= � sin � 0 � V + cos � V 0 + cos � 0 � ~V + sin � ~V 0
i�rWdt
�= hdW
dt;N � c�W i = hdW
dt; ~W i
= h� sin � 0 � V + cos � V 0 + cos � 0 � ~V + sin � ~V 0; cos � ~V � sin � V i= sin2 � 0 � hV; V i+ cos2 � hV 0; ~V i � cos � sin � hV 0; V i| {z }
0
+ cos2 � 0 � h ~V ; ~V i
+sin � cos � h ~V 0; ~V i � sin2 � h ~V 0; V i= sin2 � 0 + cos2 � hV 0; ~V i+ cos2 � 0 � sin2 � h ~V 0; V i= 0 + cos2 � hV 0; ~V i � sin2 � h ~V 0; V i:
Po zró·zniczkowaniu równosci hV; ~V i = 0 dostajemy hV 0; ~V i + hV; ~V 0i = 0sk ¾ad h ~V 0; V i = �hV 0; ~V i i�rWdt
�= 0 +
�cos2 + sin2
�� hV 0; ~V i = 0 + hV 0; ~V i = 0 + hdV
dt;N � c� V i
=d
dt+
�rVdt
�:
Conclusion 212 Je·zeli c jest przebiegiem naturalnym i V jest polem wektorówrównoleg÷ych wzd÷u·z c (czyli r-sta÷ym) to k÷ad ¾acW = c0 dostajemy wzór wyra·za-j ¾acy krzywizn ¾e geodezyjn ¾a przebiegu c
�g =
�rc0ds
�=d
dt+
�rVdt
�=d
dt
gdzie = ^ (V; c0) :
94

8.6 Parameryzacja ortogonalna
Ogromnie upraszczaj ¾acymi rachunki okazuje si¾e byc istnienie wokó÷dowolnegopunktu powierzchni tzw. parametryzacji ortogonalnej to jest takiej parame-tryzacji ' dla której linie wspó÷rz¾ednych ' (�; v) i ' (u; �) s ¾a wzajemnie prostopad÷e,inaczej mówi ¾ac dla której
F = h'ju; 'jvi = 0:
Do wykazania tego faktu potrzebne s ¾a pewne uzupe÷niaj ¾ace wiadomoscidotycz ¾ace pól wektorowych na powierzchniach (i na p÷aszczyznie).
De�nition 213 Niech X b ¾edzie polem wektorowym okreslonym na powierzchniS. Trajektori ¾a pola X nazywamy przebieg c w dziedzinie pola X taki, ·ze
Xc(t) = c0 (t) :
Wiadomo z teorii pól wektorowych, ·ze przez ka·zdy punkt przechodzi dok÷ad-nie jedna o maksymalnej dziedzinie trajektoria pola. Np gdy Xp = 0 trajektori ¾ajest przebieg sta÷y.
De�nition 214 Ca÷k ¾a pierwsz ¾a pola X w otoczeniu punktu p nazywamy ka·zd ¾afunkcj ¾e rzeczywist ¾a f okreslon ¾a w otoczeniu punktu p tak ¾a, ·ze
10) (df)q 6= 0 z tego otoczenia,
20) f jest sta÷a na ka·zdej spójnej trajektorii pola X zawartej w tym otoczeniu.
Remark 215 ×atwo spostrzec, ·ze je·zeli f jest ca÷k ¾a pierwsz ¾a pola X to spójnesk÷adowe zbioru L := fq; f (q) = constg s ¾a trejktoriami pola. Istotnie z twierdzeniao przeciwobrazie wartosci regularnej wynika, ·ze L jest 1-jednowymiarow ¾a hiper-powierzchni ¾a, czyli krzyw ¾a. Z drugiej strony skoro na trajektorii przechodz ¾acejprzez q0 2 L funkcja f jest sta÷a to trajektoria jest zawarta w L: Zatem wektorX (q0) jest styczny do L co z dowolnosci q0 dowodzi, ·ze ka·zda spójna sk÷adowaL jest trajektori ¾a pola X:
Theorem 216 W otoczeniu dowolnego punktu p 2 S dla którego X (p) 6= 0istnieje ca÷ka pierwsza pola X okreslona w pewnym otoczeniu tego punktu.
Przy pomocy parametryzacji wokó÷p sprowadzamy zagadnienie do pola naobszarze p÷askim i stosujemy klasyczne twierdzenie do pola na tym obszarze.W dowodzie wykorzystuje si¾e strumien (potok) pola wektorowego.Powy·zsze twierdzenie teraz wykorzystamy.
Proposition 217 Niech X1; X2 b ¾ed ¾a polami wektorowymi na otwartym podzbiorzeU 0 powierzchni S liniowo niezale·znymi w pewnym punkcie p 2 U 0 (a wi ¾ec i wotoczeniu). Wtedy w pewnym otoczeniu tego punktu istnieje parametryzacja 'taka, ·ze linie wspó÷rz ¾ednosciowe ' (�; v) oraz ' (u; �) s ¾a styczne do pól X1 i X2
odpowiednion (tzn. 'ukX1 i 'vkX2).
95

Proof. Niech W b¾edzie otoczeniem punktu p na którym s ¾a okreslone ca÷kipierwsze f1 i f2 pól X1 i X2 odpowiednio. De�niujemy odwzorowanie
x :W ! R2
wzoremx (q) = (f1 (q) ; f2 (q)) ; q 2W:
Poniewa·z f1 jest sta÷a na trajektoriach pola X1 to (df1)p (X1 (p)) = 0 (istotnie,bierzemy trajektorie c pola X1 przechodz ¾ac ¾a przez p; czyli c (0) = p i c0 (t) =X1 (c (t)) ; i mamy (df1)p (X1 (p)) = (df1)p (c
0 (0)) = ddt j0 (f1 � c (t)) = 0 bo
f1 � c = const ). Analogicznie (df2)p (X2 (p)) = 0. Zatem
(dx)p (X1 (p)) =�(df1)p (X1 (p)) ; (df2)p (X1 (p))
�=�0; (df2)p (X1 (p))
�;
(dx)p (X2 (p)) =�(df1)p (X2 (p)) ; (df2)p (X2 (p))
�=�(df1)p (X2 (p)) ; 0
�:
Skoro wektory X1 (p) i X2 (p) s ¾a baz ¾a TpS oraz (df2)p 6= 0 i (df2)p (X2 (p)) = 0to a := (df2)p (X1 (p)) 6= 0; analogicznie b := (df1)p (X2 (p)) 6= 0: Wynika st ¾ad,·ze macierz przekszta÷cenia (dx)p w bazie (X1 (p) ; X2 (p)) równa�
0 ab 0
�jest nieosobliwa. Z twierdzenia o dyfeomor�zmie x jest dyfeomor�zmem pewnegootoczenia W 0 �W punktu p na pewne otwarte otoczenie U punktu x (p) 2 R2:Odwzorowanie
' = (xjW 0)�1
jest szukan ¾a parametryzacj ¾a poniewa·z linie wspó÷rz¾ednosciowe ' (c1; �) i ' (�; c2)sa wobec równosci x�' = (f1; f2) �' = id postaci f1 (q) = const i f2 (q) = const[(f1; f2) �' (c1; �) = (c1; �) ; f1 (' (c1; �)) = c1; wi¾ec ' (c1; �) sk÷ada si¾e z punktówq dla których f1 (q) = c1 = const] a te s ¾a w mysl poprzedzaj ¾acej uwagi stycznedo pól X1 i X2 odpowiednio tzn. 'ukX1 i 'vkX2:
Theorem 218 W otoczeniu dowolnego punktu powierzchni S istnieje parame-tryzacja ortogonalna.
Proof. Wystarcza wzi ¾ac dwa pola niezerowe wzajemnie prostopad÷e i wyko-rzystac ostatnie stwierdzenie. Do wykazania istnienia takich pól wezmy dowoln ¾aparametryzacj¾e ' wokó÷punktu p i niech E;F;G b¾eda wspó÷czynnikami pier-wszej formy kwadratowej dla parametryzacji ': Wówczas pola
X1 = 'u; :::X2 = �F
E� 'u + 'v
s ¾a prostopad÷e, istotnie
hX1; X2i = h'u;�F
E� 'u + 'vi = �
F
E� h'u; 'ui+ h'u; 'vi = �
F
E�E + F = 0:
96

Wykorzystamy teraz istnienie parameryzacji ortogonalnych.Pierwsze zastosowanie:
Theorem 219 Niech ' b ¾edzie parametryzacj ¾a ortogonaln ¾a powierzchni S zgodn ¾az zadana orientacj ¾a zasW polem klasy C1 wektorów jednostkowych wzd÷u·z prze-biegu c (t) = ' (u (t) ; v (t)) ; t 2 (a; b) : Wtedy algebraiczna wartosc pochodnejkowariantnej pola W jest równa�
rWdt
�=
1
2 �pEG
�Gju �
dv
dt� Ejv �
du
dt
�+d
dt
gdzie jest k ¾atem zorientowanym mi ¾edzy polami 'ju (u (�) ; v (�)) i W (�) :
Proof. Wezmy pola jednostkoweX1 iX2 okreslone wzd÷u·z przebiegu c wzorami
X1 (t) ='jupE(u (t) ; v (t)) ; X2 (t) =
'jvpG(u (t) ; v (t)) : (46)
Skoro parametryzacja ' jest zgodna z zadan ¾a orientacj ¾a to pole orientuj ¾ace Njest równe
N = X1 �X2:
Ze Stwierdzenia (211) �rWdt
�=
�rX1
dt
�+d
dt
gdzie = ^ (X1;W ) jest k ¾atem zorientowanym od pola X1 do W: Z lematu(202) mamy
�rX1
dt
�= hdX1
dt;N �X1i = h
d�'jupE(u (t) ; v (t))
�dt
;X2i
= h�'jupE
�ju� u0 +
�'jupE
�jv� v0;
'jvpGi
= h�'jupE
�ju;'jvpGi � u0 + h
�'jupE
�jv;'jvpGi � v0
= h'juu �
pE � 'ju �
�pE�ju
E;'jvpGi � u0 + h
'juv �pE � 'ju �
�pE�jv
E;'jvpGi � v0 =
Poniewa·z F = h'ju; 'jvi = 0 to dostajemy
= h'juu �
pE
E;'jvpGi � u0 + h
'juv �pE
E;'jvpGi � v0
=h'juu; 'jvip
EG� u0 +
h'juv; 'jvipEG
� v0 (*)=
97

Obliczymy h'juu; 'jvi i h'juv; 'jvi wykorzystuj ¾ac dalej F = 0
0 = Fju = h'ju; 'jviju = h'juu; 'jvi+ h'ju; 'jvui
orazEjv = h'ju; 'juijv = h'juv; 'jui+ h'ju; 'juvi = 2 � h'juv; 'jui:
Dostajemy st ¾ad
h'juu; 'jvi = �h'ju; 'jvui = �1
2� Ejv:
AnalogicznieGju = h'jv; 'jviu = 2 � h'jvu; 'jvi
sk ¾ad
h'juv; 'jvi = h'jvu; 'jvi =1
2�Gju:
Tak wi¾ec �rX1
dt
�(*)=� 12 � Ejvp
EG� u0 +
12 �GjupEG
� v0
=1
2 �pEG
�Gju � v0 � Ejv � u0
:
Ostatecznie�rWdt
�=
�rX1
dt
�+d
dt=
1
2 �pEG
�Gju � v0 � Ejv � u0
+d
dt:
Podamy teraz inny dowód istnienia i jednoznacznosci przeniesienia równoleg÷egowektora wzd÷u·z przebiegu.
Theorem 220 Dla dowolnego przebiegu c : [a; b] ! S na powierzchni S (niezak÷adamy orientowalnosci) i wektora v 2 Tc(a)S istnieje dok÷adnie jedno g÷adkiepole wektorowe W wektorów równoleg÷ych wzd÷u·z c takie, ·ze X (a) = v:
Proof. 1 krok. Za÷ó·zmy, ·ze obraz/slad Im c = c [[a; b]] jest zawarty w jed-nym otoczeniu wspó÷rz¾ednosciowym odpowiadaj ¾acym jednej parametryzacji '(t.j. Im c � Im'). Otoczenie to orientujemy za pomoc ¾a ': Jesli v = 0 tooczywiscie W = 0: Gdy v 6= 0 to wystarczy twierdzenie pokazac dla wektorajednostkowego (gdy·z pole r-sta÷e pomno·zone przez sta÷¾a pozostaje r-sta÷e).Warunkiem równoleg÷osci pola W jest zerowanie si¾e pochodnej kowariantnejrWdt tego pola lub co na jedno wychodzi zerowanie si¾e jej algebraicznej wartosci�rWdt
�: Za÷ó·zmy, ·ze kvk = 1: Z Twierdzenia ostatniego zerowanie si¾e
�rWdt
�= 0
jest równowa·zne
d
dt= B (t) : � 1
2 �pEG
�Gju �
dv
dt� Ejv �
du
dt
�
98

gdzie jest k ¾atem zorientowanym mi¾edzy polami 'ju (u (�) ; v (�)) i W (�) : Jesli 0 oznacza dowolny k ¾at mi¾edzy wektorami 'ju (u (a) ; v (a)) = 'u (c (a)) i vwówczas funkcja k ¾at jest dok÷adnie równa
(t) = 0 +
Z t
a
B (�) d� :
Tym samym pole W wynosi
W (t) = cos (t) �X1 + sin (t) �X2
gdzieX1 iX2 s ¾a to pola (46)X1 (t) ='jupE(u (t) ; v (t)) ; X2 (t) =
'jvpG(u (t) ; v (t))
Jest ono klasy C1:2 krok. Gdy Im c nie le·zy w jednym otoczeniu wspó÷rz¾ednosciowym to pokry-
wamy Im c skonczon ¾a ilosci ¾a otoczen i w ka·zdym kolejno przed÷u·zamy.
WYK×AD 24-26
Drugie zastosowanie parametryzacji ortogonalnej.
Theorem 221 Je·zeli ' jest parametryzacj ¾a ortogonaln ¾a powierzchni S to krzy-wizna Gaussa wyra·za si ¾e wzorem
K � ' = � 1
2 �pEG
(�EjvpEG
�jv+
�GjupEG
�ju
):
Proof. Przypomnijmy wzór Gaussa wyra·zaj ¾acy krzywizn¾e w terminch wspó÷czyn-ników Christo¤ela
K � ' = � 1E
��212ju � �211jv + �112 � �211 + �212 � �212 � �111 � �212 � �211 � �222
�Na podstawie wzorów (34), (35), (36)
�111 � E + �211 � F =1
2� Eju
�111 � F + �211 �G = Fju �1
2� Ejv
�112 � E + �212 � F =1
2� Ejv
�112F + �212 �G =
1
2�Gju
�122 � E + �222 � F = Fjv �1
2�Gju
�122 � F + �222 �G =1
2�Gjv
99

uwzgl¾edniaj ¾ac F = 0 dostajemy
�111 =1
2�Eju
E; �211 = �
1
2�Ejv
G; �112 =
1
2�Ejv
E; �212 =
1
2�Gju
G; �122 = �
1
2�Gju
E; �222 =
1
2�Gjv
G:
Wstawiamy te wartosci do wzoru Gaussa i wykonujemy stosowne przekszta÷ceniaotrzymuj ¾ac tez¾e �212ju � �211jv + �112 � �211 + �212 � �212 � �111 � �212 � �211 � �222
K � ' = � 1E(1
2��Gju
G
�ju+1
2��Ejv
G
�jv� 14�Ejv � EjvE �G +
1
4�Gju �GjuG �G +
�14�Eju �GjuE �G +
1
4�Ejv �GjvG �G )
= � 1E(1
2�Gjuu �G�Gju �Gju
G �G +1
2�Ejvv �G� Ejv �Gjv
G �G � 14�Ejv � EjvE �G +
1
4�Gju �GjuG �G +
�14�Eju �GjuE �G +
1
4�Ejv �GjvG �G )
= � 1E(Gjuu
2 �G �1
2�Gju �GjuG �G +
Ejvv
2 �G �1
2�Ejv �GjvG �G � 1
4�Ejv � EjvE �G +
1
4�Gju �GjuG �G +
�14�Eju �GjuE �G +
1
4�Ejv �GjvG �G )
= � 1
2E(Gjuu
G� 12�Gju �GjuG �G � 1
2�Eju �GjuE �G +
Ejvv
G� 12�Ejv �GjvG �G � 1
2�Ejv � EjvE �G
Z drugiej strony
� 1
2 �pEG
(�EjvpEG
�jv+
�GjupEG
�ju
)
= � 1
2 �pEG
8<:Ejvv �pEG� Ejv �
Ejv�G+E�Gjv
2pEG
EG+Gjuu �
pEG�Gju �
Eju�G+E�Gju
2pEG
EG
9=;= � 1
2
�Ejvv
EG�Ejv � Ejv �G+ Ejv � E �Gjv
2EGEG+Gjuu
EG�Gju � Eju �G+Gju � E �Gju
2EGEG
�= � 1
2E
�Ejvv
G�Ejv � Ejv2 � E �G �
Ejv �Gjv2 �G �G +
Gjuu
EG�Gju � Eju2 � E �G �
Gju �Gju2 �G �G
�otrzymujemy to samo wyra·zenie.
9 Twierdzenie Gaussa-Bonneta i jego zastosowa-nia
9.1 Lokalne Twierdzenie Gaussa-Bonneta
B¾edzie potrzebna wersja Tw. Greena dla obszarów p÷askich o brzegu kawa÷kamig÷adkim ([Ko÷odziej, str. 442-443]. Jest to szczególny przyk÷ad Twierdzenia
100

Stokesa dla regularnych podzbiorów hiperpowierzchni o brzegu "nie ca÷kiemg÷adkim". (A.Birkholc, "Analiza matematyczna, funkcje wielu zmiennych" PWN-jedyna ksi ¾a·zka po polsku zw wzorem Stokesa dla brzegów z osobliwosciami).Niech A b¾edzie zwartym podzbiorem k wymiarowej hiperpowierzchni M �
Rm (bez brzegu). Niech IntA oznacza wn¾etrze zbioru A w przestrzeni topolog-icznej M i rozwa·zmy brzeg zbioru A
@A = AnIntA:
Punkt p 2 @A nazywamy regularnym jesli cz¾esc wspólna zbioru @A i pewnegootoczenia punktu p w M jest podhiperpowierzchni ¾a g÷adk ¾a k � 1-wymiarow ¾a.Pozosta÷e punkty z brzegu @A nazywamy punktami osobliwymi. Oznaczmypodzbiór punktów regularnych przez @rA a osobliwych przez @sA (osobliwy =singularny, st ¾ad indeks s ).Podzbiór A � M nazywamy regularny je·zeli ka·zdy punkt p 2 @rA nale·zy
do domkni¾ecia wn¾etrza IntA; @rA � IntA: (Rysunek c) ze str 424 w Birkholcujest przyk÷adem zbioru nieregularnego, na plaszczyznie przyk÷adem jest ko÷o zwysuni¾etym odcinkiem).
Theorem 222 Ogólne Tw Stokesa dla podzbiorów regularnych w hiperpowierzch-niach. (Birkholc, Tw 8.1 + uwaga 3)Niech M � Rm b ¾edzie g÷adk ¾a k wymiarow ¾a hiperpowierzchni ¾a zorientowan ¾a
i A � M regularnym zwartym podzbiorem M , oraz ! - g÷adk ¾a k � 1-form ¾aró·zniczkow ¾a na M: Zak÷admy, ·ze� brzeg osobliwy @sA zbioru A zawiera si ¾e w przeliczalnej rodzinie podhiper-
powierzchni o wymiarach mniejszych od k � 1;� podhiperpowierzchnie k � 1 wymiarowe wchodz ¾ace w sk÷ad brzegu regu-
larnego @rA s ¾a zorientowane dodatnio wzgl ¾edem A i ca÷kaR@rA
! istnieje.Wtedy zachodzi wzór StokesaZ
A
d! =
Z@rA
!:
Dla 1-formy na p÷aszczyznie ! = Pdx+Qdy jej ró·zniczka wynosi
d! = d (Pdx+Qdy) = dP ^ dx+ (�1)stP P � ddx|{z}=0
+ dQ ^ dy + (�1)stQQ � ddy
=
�@P
@x� dx+ @P
@y� dy�^ dx+
�@Q
@x� dx+ @Q
@y� dy�^ dy
=@P
@x� dx ^ dx| {z }
=0
+@P
@y� dy ^ dx| {z }=�dx^dy
+@Q
@x� dx ^ dy + @Q
@y� dy ^ dy
= �@P@y� dx ^ dy + @Q
@x� dx ^ dy
=
�@Q
@x� @P
@y
�� dx ^ dy
101

Ca÷ka z dwu formy�@Q@x �
@P@y
�� dx ^ dy po obszarze p÷askim A jest ca÷k ¾a
Lebesqu�a (Riemanna) z funkckji�@Q@x �
@P@y
�.
Remark 223 Wyjasnijmy jeszcze dodatni ¾a orientacj ¾e podhiperpowierzchni k�1wymiarowych zawartych w brzegu regularnym @rA (@rA jest sum ¾a roz÷¾acznychspójnych k � 1 wymiarowych podhiperpowierzchni, wi ¾ec jest sam rownie·z k � 1wymiarow ¾a podhiperpowierzchni ¾a. Orientacja w Tp (@rA) dana reperem (v1; :::; vn�1)jest dodatnia je·zeli, dla wektora w 2 TpM skierowanego do wewn ¾atrz zbioru A[tzn. w = �0 (0) dla ÷uku � : [0; a) ! M takiego, ·ze � [(0; a)] � AnFrrA;� (0) = p] baza (�w; v1; :::; vn�1) jest dodatnia.
Dla obszaru p÷askiego M � R2 o brzegu kawa÷kami g÷adkim dodatnia ori-entacja brzegu jest nast¾epuj ¾aca: Niech M � R2 b¾edzie obszarem domkni¾etym[domkni¾ecie zbioru otwartego U , M = �U ] którego brzeg @M sk÷ada si¾e z krzy-wych przedzia÷¾ami klasy Ck. Orientacja brzegu @M jest dodatnia gdy: id ¾acwzd÷u·z brzegu mamy obszar U po lewej r¾ece. Uzasadnienie. W punkcie g÷ad-kosci brzegu p 2 @M wektor v styczny do brzegu, v 2 Tp@M nale·zy do dodatniejorientacji krzywej @M gdy dla wektora w skierowanego do wewn ¾atrz U para(�w; v) jest dodatnia, czyli para (v; w) jest dodatnia, czyli zgodna z wersoramiosi wspó÷rz¾ednych, czyli id ¾ac w stron¾e v mamy wektor w (t.j. obszar M) polewej stronie.W przypadku gdy zbiór regularny A nie ma punktów osobliwych, @A = @rA
wówczas A jest po prostu hiperpowierzchni ¾a z brzegiem @A i mamy klasycznywzór Stokesa na hiperpowierzchni zorientowanej z brzegiem. Niech M b¾edzietak ¾a hiperpowierzchni ¾a n wymiarow ¾a z brzegiem @M dodatnio zorientowanym,wtedy dla n � 1 formy ró·zniczkowej ! jest wzór Stokesa
RMd! =
R@M
!: Wszczególnosci gdy M nie ma brzegu, @M = ? to
RMd! = 0: Ten wniosek ju·z
dawno wykorzystalismy przy dowodzie homotopijnej niezmienniczosci krzywiznyzorientowanej krzywej p÷askiej.Przejdzmy do szczegolnego przypadku Tw. Stokesa jakim jest Twierdzenie
Greena dla obszaru (domkni¾ecie zbioru otwartego) p÷askiego o brzegu kawa÷kamiklasy C1. { k = 2; brzeg osobliwy @sA zbioru A zawiera si¾e w przeliczalnejrodzinie podhiperpowierzchni o wymiarach mniejszych od 2�1 czyli mniejszychni·z 1 a wi¾ec 0; czyli jest dyskretny - sk÷ada si¾e z izolowanych poszczególnychpunktów, zatem brzeg regularny @rA jest sum ¾a przeliczalnej ilosci przebiegów,a·zeby zabezpieczyc istnienie ca÷ki bo brzegu regularnym wystarczy ·z ¾adac, abybrzeg @A by÷sum ¾a przebiegów przedzia÷ami ró·zniczkowalnych regularnych}.B¾edzie nam potrzebna nast¾epuj ¾aca wersja:
Theorem 224 (Tw. Greena dla obszarów o brzegu kawa÷kami g÷ad-kim regularnym) Je·zeli obszar domkni ¾ety p÷aski A � R2 jest ograniczonyprzebiegiem zamkni ¾etym przedzia÷ami klasy C1 c (t) = (u (t) ; v (t)) ; t 2 [a; b] ;regularnym o wierzcho÷kach (u (ti) ; v (ti)), i = 0; :::; k + 1; a = t0 < t1 < ::: <tk < tk+1 = b (tzn. cj [ti; ti+1] jest klasy C1 i regularny) wówczas dla funkcji Pi Q klasy C1 okreslonych na pewnym zbiorze otwartym zawieraj ¾acym A zachodzi
102

wzór Z@rA
(Pdu+Qdv) =
ZA
d (Pdu+Qdv) =
ZA
�@Q
@u� @P
@v
�dudv;
czyli szczegó÷owiej pisz ¾ac
kXi=0
Z ti+1
ti
�P (u (t) ; v (t)) � du
dt+Q (u (t) ; v (t)) � dv
dt
�dt =
ZZA
�@Q
@u(u; v)� @P
@v(u; v)
�dudv:
Zde�niujemy teraz zorientowane k ¾aty zewn¾etrzne w wierzcho÷kach (u (ti) ; v (ti)),czyli punktach w których pochodne lewostronne s ¾a inne od prawostronnychc0�t�i�6= c0
�t+i�: Wierzcho÷ki s ¾a dwojakiego rodzaju: albo jest to ostrze i
c0�t�i�= �c0
�t+i�(czyli k ¾at niezorientowany jest �) albo nie jest to ostrze
c0�t�i�6= �c0
�t+i�i k ¾at niezorientowany jest z przedzia÷u (0; �) : Nadamy k ¾a-
towi znak. Wyjasniaj ¾a to rysunki pogl ¾adowo.
103

Formalnie tak: dla nieostrza znak jest dodatni gdy para�c0�t�i�; c0�t+i��do-
datnio orientuje przestrzen styczn ¾a Tc(ti)S a znak jest ujemny gdy orientujeujemnie, równowa·znie bez u·zywania przestrzeni stycznych, gdy trzy wektory wR3�c0�t�i�; c0�t+i�; Nc(t)
�orientuj ¾a R3 dodatnio lub odpowiednio ujemnie.
Dla ostrza trzeba wzi ¾ac bliskie punkty w stosunku do ostrza i rozwa·zycorientacj¾e R3 przez te trójki
�c0�t�"i�; c0�t+"i�; Nc(t)
�:
B¾edzie te·z potrzebne inne Tw Hopfa te·z z pracy Hopfa, Compositio Math-ematica 2 (1935), 50-62 (z przebiegu naturalnego g÷adkiego na przedzia÷amiregularny maj ¾acy wierzcho÷ki i k ¾aty zewn¾etrzne. Nawet do Carmo nie podajedowodu !
Theorem 225 (O obrocie stycznej) Niech ' : U ! S b ¾edzie dodatniaparametryzacj ¾a zorientowanej powierzchni S tak ¾a, ·ze U jest homeomor�cznyz otwartym ko÷em. Niech c : [a; b] ! ' [U ] � S b ¾edzie przebiegiem zamkni ¾e-tym bez samoprzeci ¾ec przedzia÷ami regularnym o wierzchokach c (ti) ; k ¾atachzewn ¾etrznych �i i niech i : [ti; ti+1] ! R b ¾edzie k ¾atem zorientowanym mi ¾edzypolami 'u i c
0i; i = ^ ('u; c0i) (gdzie ci = cj [ti; ti+1] ). Wówczas
kXi=0
( i (ti+1)� i (ti)) +kXi=0
�i = 2�:
Gdy c jest g÷adki, nie ma k ¾atów t0 = a; t1 = b wtedy (b) � (a) = 2�co jest widoczne rysunkowo i uogólnia p÷aski przypadek Tw. Hopfa o indeksie.Gdy powierzchnia S jest p÷aska i kawa÷ki ci s ¾a odcinkami wówczas funkcje k ¾at s ¾asta÷e sk ¾ad i (ti+1) = i (ti) i pierwsza suma jest zero. Otrzymujemy równoscPk
i=0 �i = 2�:
104

Theorem 226 (Lokalne twierdzenie Gaussa-Bonneta) Niech ' : U ! Sb ¾edzie ortogonaln ¾a dodatni ¾a parametryzacj ¾a zorientowanej powierzchni S tak ¾a,·ze U jest homeomor�czny z otwartym ko÷em. Je·zeli R � Im' jest obszaremdomkni ¾etym którego brzegiem jest jeden przebieg zamkni ¾ety c : [a; b] ! S do-datnio zorientowany przedzia÷ami naturalny bez samoprzeci ¾ec o wierzcho÷kachc (ti) i k ¾atach zewn ¾etrznych �i wówczas
kXi=0
Z ti+1
ti
�g (s) ds+
ZZR
KdS +kXi=0
�i = 2�
gdzie �g oznacza krzywizn ¾e geodezyjn ¾a regularnych cz ¾esci przebiegu c zas K jestkrzywizn ¾a Gaussa powierzchni S:
Remark 227 Przed dowodem zwrócmy uwag ¾e na pewien bardzo szczegolny przy-padek ju·z zbadany: mianowicie gdy powierzchnia jest p÷aszczyzn ¾a to krzywiznageodezyjna �g jest krzywizn ¾a zorientowan ¾a � (Uwaga 206), krzywizna Gaussap÷aszczyzny jest równa 0 i dla przebiegu naturalnego g÷adkiego (bez wierzcho÷ków,brak k ¾atów zewn ¾etrznych ) zamkni ¾etego bez samoprzeci ¾ec dodatnio zorientowanegotwierdzenie Hopfa orzeka, ·ze krzywizna ca÷kowita przebiegu jest rowna 2�: Jestto szczególny przypadek powy·zszego wzoru
R ba� (s) ds +
RRR0dS + 0 = 2�. Dla
przebiegu p÷askiego który jest ÷aman ¾a - tam krzywizny zorientowane s ¾a 0 - mamyPki=0 �i = 2�, tzn. za krzywizne globaln ¾a odpowiadaj ¾a k ¾aty zewn ¾etrzne. Np. dla
prostok ¾ata k ¾aty zewn ¾etrzne to �2 ; jest ich 4 i w sumie daj ¾a tyle co trzeba 2�:
Dla n-k ¾ata foremnego ÷atwo policzyc k ¾aty zewn ¾etrzne: � 2n -cwiczonko - sk ¾ad wsumie n takich k ¾atów wychodzi te·z 2�.
Proof. lokalnego tw G-B.Przypomnijmy: (Def. (203) krzywizn ¾a geodezyjn ¾a �g przebiegu naturalnego
c na na zorientowanej powierzchni S nazywamy algebraiczn ¾a wartosc pochodnejkowariantnej pola jednostkowego W = c0; t.j.
�g =
�rc0ds
�:
Na mocy Tw. (219) w parametryzacji ortogonalnej jest równa
�g =1
2 �pEG
�Gju �
dv
ds� Ejv �
du
ds
�+d ids
gdzie i jest k ¾atem zorientowanymmi¾edzy polami 'ju (u (�) ; v (�)) i c0 (�) ; ^�'ju; c
0�
dla odpowiedneij cz¾esci przebiegu c: Calkuj ¾ac w granicach od ti do ti+1 i sumu-
105

j ¾ac otrzymujemy
kXi=0
Z ti+1
ti
�g (s) ds
=kXi=0
Z ti+1
ti
1
2 �pEG
�Gju �
dv
ds� Ejv �
du
ds
�ds+
kXi=0
Z ti+1
ti
d ids
ds
=kXi=0
Z ti+1
ti
�1
2�GjupEG� dvds� 12�EjvpEG� duds
�ds+
kXi=0
( i (ti+1)� i (ti))
Z twierdzenia Greena zastosowanego do obszaru p÷askiego domkni¾etego A ='�1 [R] ograniczonego zamkni¾etym dodatnio zorientowanym przedzia÷ami reg-ularnym przebiegiem (u (s) ; v (s)) = '�1 (c (s)) ; s 2 [a; b] ; mamy dla P =
� 12 �EjvpEG
; Q = 12 �
GjupEG
oraz z Twierdzenia o obrocie stycznej
=
ZZA
"�1
2�GjupEG
�ju���12�EjvpEG
�jv
#dudv +
2� �
kXi=0
�i
!:
Z Tw (221) mamy zatem K � ' = � 12�pEG
=
ZZA
��pEG �K � ' dudv
�+ 2� �
kXi=0
�i
Cwiczenie zamiana ca÷ki powierzchniowej na podwojn ¾a
=
ZZR
�K dS + 2� �kXi=0
�i:
Obliczymy przyrost k ¾ata po przesuni¾eciu wektora v 2 Tc(0)S po przebieguc bez samoprzeci¾ecia zawartego w dziedzinie parametryzacji ortogonalnej ' :U ! S o dziedzinie U homeomor�cznej z ko÷em.
Theorem 228 (O przyroscie k ¾ata wektorów równoleg÷ych) Niech b¾ed ¾aspe÷nione za÷o·zenia poprzedniego twierdzenia. Wezmy wektor jednostkowy v 2Tc(0)S styczny do S w punkcie startu przebiegu c : [a; b] ! ' [U ] � S i prze-niesmy go równolegle wzd÷u·z c otrzymuj ¾ac pole jednostkowe wektorów równoleg÷ychW: Oznaczmy przez : [a; b] ! R k ¾at zorientowany mi ¾edzy 'ju i W: Wówczasprzyrost k ¾ata � jest niezale·zny od wyboru v i równa si ¾e
� =
ZZR
KdS:
gdzie R � Im' jest obszarem domkni ¾etym którego brzegiem jest c:
106

Proof. Równoleg÷osc pola W oznacza znikanie pochodnej kowariantnej rWd =0: W/g Tw. (219) dostajemy równosc
0 =1
2 �pEG
�Gju �
dv
ds� Ejv �
du
ds
�+d
ds
któr ¾a ca÷kujemy w przedziale [a; b]
0 =kXi=0
Z ti+1
ti
�1
2 �pEG
�Gju �
dv
ds� Ejv �
du
ds
��+
kXi=0
Z ti+1
ti
d
ds
=kXi=0
Z ti+1
ti
�1
2�GjupEG� dvds� 12�EjvpEG� duds
�+
kXi=0
( (ti+1)� (ti))
=kXi=0
Z ti+1
ti
�1
2�GjupEG� dvds� 12�EjvpEG� duds
�+ (b)� (a)
= �ZZ
R
KdS +� :
Ostatnia równosc otrzymalismy tak samo jak w dowodzie lokalnego Tw G-Bkorzystaj ¾ac z Twierdzenia Greena i wzoru na krzywizn¾e (Tw. 221).Zastosujemy lokalne Twierdzenie Gaussa-Bonneta do ma÷ych trójk ¾atów
geodezyjnych, tzn. trójk ¾atów zawartych w dziedzinie parametryzacji ortogo-nalnej o dziedzinie homeomor�cznej z ko÷em i którego brzeg sk÷ada si¾e z trzechgeodezyjnych ÷¾acznie daj ¾acych przebieg przedzia÷ami naturalny i którego k ¾atywewn¾etrzne s ¾a mniejsze ni·z � a nast¾epnie obliczymy sum¾e jego k ¾atów wewn¾etrznych.Zwrócmy uwag¾e, ·ze na sferze (prawy rysunek) zewn¾etrze zakreskowanego trójk ¾atate·z jest trójk ¾atem o tych samych bokach homeomor�cznym z ko÷em a jego k ¾atywewn¾etrzne s ¾a wi¾eksze od �:
107

Zauwa·zmy, ·ze w ka·zdym wierzcho÷ku suma k ¾ata wewn¾etrzenego �j i zewn¾etrznego�j jest równa �; �j + �j = �; sk ¾ad
�j = � � �j
Kat zewnetrzny i wewnetrzny dla trojkatadodatnio zorientowanrgo
Theorem 229 Suma k ¾atów wewn ¾etrznych �3i=1�i ma÷ego trójk ¾ata geodezyjnegoT na powierzchi S o krzywiznie K (p) ; p 2 S; wynosi
�3i=1�i = � +
ZZT
KdS:
Proof. Geodezyjna ma krzywizn¾e geodezyjn ¾a zerow ¾a, �g (s) = 0, st ¾ad z lokalnegoTwierdzenia Gaussa otrzymujemy
0 +
ZZT
KdS +
3Xi=1
�i = 2�
gdzie �i s ¾a k ¾atami zewn¾etrznymi trójk ¾ata T: Sk ¾ad z równosci �j = � � �jotrzymujemy ZZ
T
KdS +3Xi=1
(� � �i) = 2�
ZZT
KdS + 3� �3Xi=1
�i = 2�
3Xi=1
�i = � +
ZZT
KdS:
Dlatego na powierzchni o krzywiznie dodatniej suma k ¾atów wewn¾etrznychtrójk ¾ata jest wi¾eksza od �; zas na powierzchni o krzywiznie ujemnej jest mniejszaod �:
108

Z Twierdzenia o przyroscie miary k ¾ata po równoleg÷ym przesuni¾eciu wzd÷u·zboków ma÷ego geodezyjnego trójk ¾ata otrzymujemy
� =
ZZR
KdS =3Xi=1
�i � �:
LiczbaP3
i=1 �i � � nazywa si¾e nadmiarem lub defektam trójk ¾ata geodezyjnegoT i jest równa
RRRKdS oraz przyrostowi miary k ¾ata po jego równoleg÷ym prze-
suni¾eciu wzd÷u·z boków.
WYK×AD 27-30
9.2 Globalne Twierdzenie Gaussa-Bonneta
Przebieg zamkni¾ety, przedzia÷ami regularny bez samoprzeci¾ec nazywac b¾edziemyprzebiegiem prostym. Jego obraz nazywac b¾edziemy krzyw ¾a zamkni¾et ¾aprzedzia÷ami regularn ¾a.
De�nition 230 Obszar domkni ¾ety (czyli domkni ¾ecie zbioru otwartego) R � Snazywamy regularnym je·zeli jest zwarty i jego brzeg @R (w przestrzeni topolog-icznej S) jest sum ¾a krzywych zamkni ¾etych przedzia÷ami regularnych nieprzeci-naj ¾acych si ¾e ze sob ¾a.Na powierzchni zorientowanej S ka·zda z tych krzywych zawartych w @R mo·ze
byc dodatnio zorientowana wzgl ¾edem R (patrz uwaga (223).Powierzchni ¾e zwart ¾a S uwa·zamy za obszar domkni ¾ety regularny z pustym
brzegiem. Ka·zda zwarta powierzchnia S � R3 jest orientowalna. W R4 ju·z nie,mo·zna wyci ¾ac na sferze ko÷o i w brzeg tego ko÷a wkleic brzeg wst ¾egi Möbiusa.Otrzymana powierzchnia nie daje si ¾e zanurzyc w R3 bez samoprzecinania si ¾e(jest to topologicznie to samo co butelka Kleina) ale daje si ¾e zanurzyc homeo-mor�cznie w R4:
De�nition 231 Trójk ¾atem na powierzchni S nazywamy obszar domkni ¾ety reg-ularny ktorego brzeg jest jedn ¾a krzyw ¾a zamkni ¾et ¾a przedzia÷ami regularn ¾a o trzechwierzcho÷kach.
Proposition 232 Triangulacj ¾a regularnego obszaru R � S nazywamy skonc-zon ¾a rodzin ¾e F trojk ¾atów Ti � S; i = 1; :::; n; tak ¾a, ·ze1)STi = R;
2) gdy Ti \ Tj 6= ? to Ti \ Tj jest albo wspóln ¾a kraw ¾edzi ¾a ca÷¾a obu trójk ¾atówalbo wspólnym wierzcho÷kiem,3) ka·zdy wierzcho÷ek nale·z ¾acy do którejs z krzywych ograniczaj ¾acych obszar
R jest wierzcho÷kiem któregos z trojk ¾atów Ti:
Wprowadzmy dla danej triangulacji F obszaruR � S nast¾epuj ¾ace oznaczenia:F = ilosc scian (t.j. trójk ¾atów),E = ilosc boków (t.j. kraw¾edzi),V = ilosc wierzcho÷ków.
109

De�nition 233 Liczba� = F � E + V
nazywa si ¾e charakterystyk ¾a Eulera-Poincarégo triangulacji F :
Podamy bez dowodu podstawowe fakty dotycz ¾ace triangulacji i jej charak-terystyki Eulera-Poincarégo.
Theorem 234 1) Ka·zdy obszar regularny R � S dopuszcza triangulacj ¾e.2) Je·zeli S jest powierzchni ¾a zorientowan ¾a i f'�g jest skonczon ¾a rodzin ¾a
parametryzacji ortogonalnych zgodnych z zadan ¾a orientacj ¾a to istnieje triangu-lacja F obszaru R taka, ·ze ka·zdy trójk ¾at T 2 F jest zawarty w pewnym otoczeniuwspó÷rz ¾ednosciowym Im'� i je·zeli brzeg ka·zdego trójk ¾ata zorientowac dodatnio(patrz Uwaga (223) ) to granicz ¾ace trójk ¾aty maj ¾a przeciwne orientacje na wspól-nej kraw ¾edzi.3) Charakterystyka Eulera-Poincarégo obszaru regularnego R nie zale·zy od
wyboru triangulacji tego obszaru. Oznaczamy j ¾a
� (R) :
Dwa regularne obszary homeomor�czne maj ¾a jednakowe charakterystyki Eulera-Poincarégo.4) Je·zeli S i S0 s ¾a dwiema zwartymi powierzchniami w R3 o jednakowych
charakterystykach Eulera-Poincarégo � (S1) = � (S2) to S jest homeomor�czna zS0: Jedynymi liczbami b ¾ed ¾acymi charakterystykami Eulera-Poincarégo zwartychpowierzchni w R3 s ¾a
2; 0; �2; �4; :::; �2n; :::Powierzchniami o takich charakterystykach s ¾a- sfera, � = 2;- sfera z jedn ¾a r ¾aczk ¾a (torus), � = 0;- sfera z n-r ¾aczkami (n-torus), � = 2� 2n:W konsekwencji ka·zda zwarta powierzchnia S w R3 jest homeomor�czna ze
sfer ¾a z pewn ¾a ilosci ¾a r ¾aczek. Liczba r ¾aczek
2� � (S)2
nosi nazw ¾e genusu powierzchni S:
Theorem 235 (Globalne twierdzenie Gaussa-Bonneta) Niech R � Sb ¾edzie obszarem regularnym na zorientowanej powierzchni S którego brzeg sk÷adasi ¾e z krzywych zamkni ¾etych przedzia÷ami regularnych C1; :::; Cn: Za÷ó·zmy, ·zeka·zda krzywa Ci jest naturalnie sparametryzowana, dodatnio zorientowana wzgl ¾e-dem R i �1; :::; �k jest zbiorem wszystkich k ¾atów zewn ¾etrznych zorientowanychwszystkich tych krzywych. Wówczas
nXi=0
Z ti+1
ti
�g (s) ds+
ZZR
KdS +
kXj=0
�j = 2� � � (R) :
110

W szczególnosci gdy R = S t.j. gdy brzeg @R jest pusty, wówczas brak jestkrzywych Ci i k ¾atów i wówczasZZ
S
KdS = 2� � � (R) :
Proof. Wezmy triangulacj¾e F obszaru R tak ¾a, ·ze ka·zdy trójk ¾at Tj z tej tri-angulacji jest ma÷y i jest zawarty w otoczeniu wspó÷rz¾ednosciowym 'j [Uj ] dlapewnej ortogonalnej parametryzacji zgodnej z zadan ¾a orientacj ¾a 'j takiej, ·zeUj jest homeomor�czny z otwartym ko÷em. Brzeg ka·zdego trójk ¾ata Tj ; @Tj ; zF orientujemy dodatnio i stosujemy lokalne Twierdzenie Gaussa-Bonneta dlaka·zdego trójk ¾ata TjZ
@Tj
�g (s) ds+
ZZTj
KdS +3Xi=1
�j;i = 2� (47)
gdzie �j;1; �j;2; �j;3 oznaczaj ¾a trzy k ¾aty zorientowane zewn¾etrzne trójk ¾ata Tj :Na wspólnym brzegu dwu trójk ¾atów mamy orientacje przeciwne, krzywizna geo-dezyjna przebiegu zmienia znak przy zmianie orientacji (Cwiczenie (205)) wi¾ecdwie ca÷ki skalarne po takich bokach znosz ¾a si¾e. Po dodaniu równosci (47) dlawszystkich j = 1; 2; :::; F (F - ilosc trójk ¾atów w triangulacji F) dostajemy
nXi=0
Z ti+1
ti
�g (s) ds+
ZZR
KdS +FXj=1
3Xi=1
�j;i = 2� � F: (48)
[Gdy gdy R = S t.j. gdy brzeg @R jest pusty, wówczas brak jest krzywych Ci ik ¾atów i wszystkie ca÷ki po kraw¾edziach trójk ¾atów Tj znosz ¾a si¾e i otrzymujemywniosek
RRSKdS +
PFj=1
P3i=1 �j;i = 2� � F ].
Poniewa·z trójkaty Tj s ¾a dodatnio zorientowane to k ¾aty zewn¾etrzne zorien-towane s ¾a dodatnie z zakresu (0; �) : Po÷ó·zmy
�j;i = � � �j;i:
Jest to k ¾at wewn¾etrzny trójk ¾ata Tj przy i-tym wierzcho÷ku.(patrz rysunek wy·zej).Par indeksów (j; i) jest oczywiscie 3F sk ¾ad
FXj=1
3Xi=1
�j;i =FXj=1
3Xi=1
(� � �j;i) = 3F � � �FXj=1
3Xi=1
�j;i: (49)
Wprowadzmy pomocnicze oznaczenia:Ee - liczba zewn¾etrznych boków triangulacji F (t.j. takich, które nale·z ¾a do
którejs z krzywych Ci),Ei - liczba wewn¾etrznych boków triangulacji F (t.j. takich, które nie nale·z ¾a
do ·zadnej z krzywych Ci),Ve - liczba zewn¾etrznych wierzcho÷ków triangulacji F ((t.j. takich, które
nale·z ¾a do którejs z krzywych Ci),
111

Vec = k - liczba zewn¾etrznych wierzcho÷ków triangulacji F które s ¾ajednoczesnie wierzcho÷kami krzywych Ci (tyle co k ¾atów zewn¾etrznych),
Vet - liczba zewn¾etrznych wierzcho÷ków triangulacji F które nie s ¾a jed-noczesnie wierzcho÷kami krzywych Ci;
Vi - liczba wewn¾etrznych wierzcho÷ków triangulacji F (t.j. takich, które nienale·z ¾a do ·zadnej z krzywych Ci).Oczywiscie
E = Ee + Ei
Ee = Ve
V = Ve + Vi
Ve = Vec + Vet:
Ka·zdy trójk ¾at ma 3 boki, przy czym boki wewn¾etrzne s ¾a w dwu trójk ¾atach,zewn¾etrzne zas w jednym, zatem
3F = 2Ei + Ee:
Pozwala to dalej ci ¾agn ¾ac równosc (49):Xj;i
�j;i = 3F � � �Xj;i
�j;i
= � � (2Ei + Ee)�Xj;i
�j;i
= 2� � E1 + 2� � Ee � � � Ee �Xj;i
�j;i
= 2� � (E1 + Ee)� � � Ee �Xj;i
�j;i
= 2� � E � � � Ee �Xj;i
�j;i:
K ¾aty �j;i dzielimy na trzy grupy:- a) wewn¾etrzne - suma tych k ¾atów przy jednym wierzcho÷ku wynosi 2�,
÷¾acznie przy wszystkich tych wierzcho÷kach suma wynosi 2� � Vi;- b) zewn¾etrzne o wierzcho÷ku nale·z ¾acym do którejs z krzywych Ci ogranicza-
j ¾acych obszar R; suma tych k ¾atów przy jednym wierzcho÷ku wraz z zorien-towanym k ¾atem zewn¾etrznym przy tym wierzcho÷ku wynosi � [zobaczyc ry-sunkowo w ró·znych sytuacjach] st ¾ad suma tych k ¾atów przy jednym wierzcho÷kuodpowiadaj ¾acym k ¾atowi zewn¾etrznemu �j wynosi �� �j ; skoro ilosc tych wierz-cho÷ków jest równa Vec to ÷¾acznie przy wszystkich tych wierzcho÷kach sumawynosi
kXj=1
(� � �j) = � � Vec �kXj=1
�j ;
112

- c) zewn¾etrzne pozosta÷e - suma k ¾atów przy jednym takim wierzcho÷kuwynosi � a ilosc tych wierzcho÷ków jest Vet wi¾ec ÷¾acznie suma tych k ¾atów równasi¾e � � Vet:Tak wi¾ecX
j;i
�j;i = 2� � E � � � Ee �Xj;i
�j;i
= 2� � E � � � Ee �
0@2� � Vi + � � Vec � kXj=1
�j + � � Vet
1A= 2� � E � � � Ee � � � (Vec + Vet)� 2� � Vi +
kXj=1
�j
= 2� � E � � � Ee � � � Ve � 2� � Vi +kXj=1
�j
= 2� � E � 2� � (Ve + Vi) +kXj=1
�j
= 2� � E � 2� � V +kXj=1
�j
St ¾ad wynika równosc
kXj=1
�j =Xj;i
�j;i � 2� � E + 2� � V:
Z (49)P
j;i �j;i = 3F ���P
j;i �j;i i równosci powy·zszej oraz (48) otrzymujemy
nXi=0
Z ti+1
ti
�g (s) ds+
ZZR
KdS +kXj=0
�j
=nXi=0
Z ti+1
ti
�g (s) ds+
ZZR
KdS +Xj;i
�j;i � 2� � E + 2� � V
= 2� � F � 2� � E + 2� � V= 2� � (F � E + V )= 2� � � (R) :
Example 236 Sprawdzic niezale·znosc charakterystyki Eulera-Poincarégo od tri-angulacji na przyk÷adzie ró·znych triangulacji trójk ¾ata (� (R) = 1).
Example 237 Obliczyc charakterystyk ¾e Eulera-Poincarégo obszaru ograniczonyjedn ¾a krzyw ¾a przedzia÷ami regularn ¾a bez samoprzeci ¾ec (na kilku przyk÷adach)(� (R) = 1).
113

Example 238 Obliczyc charakterystyk ¾e Eulera-Poincarégo pierscienia (z wi ¾eci homeomor�cznego z nim cylindra) (� (R) = 0).
Example 239 Obliczyc charakterystyk ¾e Eulera-Poincarégo podwójnego piers-cienia.
Example 240 Obliczyc charakterystyk ¾e Eulera-Poincarégoa) sfery, �S2 = 2; oto przyk÷adowa triangulacja sfery (aby to zobaczyc
zwijamy odcinek 1 � 2 � 3 � 1 do okr ¾egu uto·zsamiaj ¾ac konce [st ¾ad konce s ¾atym samym punktem na sferze], kraw ¾edzie 1� 4 oraz 1� 5 ÷¾acznie s ¾a na sferzepo÷udnikiem ÷¾acz ¾acym biegun pó÷nocny N = 4 z biegunem po÷udniowym S = 5:
sfery
19:pdf
ilosc wierzcho÷ków - 5
ilosc kraw ¾edzi - 9
ilosc trójk ¾atów - 6
�S2 = 5� 9 + 6 = 2
genus g =2� 22
= 0 - sfera bez r ¾aczek
b) torusa, �T = 0; przyk÷adowa triangulacja (zwijamy pasek papieru do rurkisklejaj ¾ac górny odcinek z dolnym w tym samym kierunku, potem zwijamy "do
114

srodka" lewy i prawy odcinek sklejaj ¾ac w tym samym kierunku)
torus
20:pdf
ilosc wierzcho÷ków - 9
ilosc kraw ¾edzi - 27
ilosc trójk ¾atów - 18
�T = 9� 27 + 18 = 0
genus g =2� 02
= 1 sfera z 1 r ¾aczk ¾a
c) wst ¾egi Möbiusa,d) torusa z wyci ¾etym ko÷em,e) sfery z wyci ¾etymi trzema ko÷ami.f) powierzchni powsta÷ej ze sfery po wyci ¾eciu ko÷a i wklejeniu tam wst ¾egi
Möbiusa (� (R) = 1 ). Dla nieorientowalnej powierzchni zwartej - butelki Kleina= przestrzen rzutowa = wycinamy w sferze ko÷o i zaklejamy wst ¾eg ¾a Möbiusa(równowa·znie sklejamy punkty antypodyczne). Na rysunku zewn ¾etrzny okr ¾agobrazuje wyci ¾ete ko÷o i uto·zsamiamy punkty antypodyczne ponumerowane tymi
115

samymi cyframi i kraw ¾edzie ÷¾acz ¾ace wierzcho÷ki o takich samych wierzcho÷kach
klein
21:pdf
ilosc wierzcho÷ków - 6
ilosc kraw ¾edzi - 15
ilosc trójk ¾atów - 10
�K = 6� 15 + 10 = 1
Z globalnego Twierdzenia Gaussa-Bonneta wynikaj ¾a wnioski:
Conclusion 241 Je·zeli R � S jest obszarem regularnym prostym, tzn. ogranic-zonym jedn ¾a krzyw ¾a bez samoprzeci ¾ec i homeor�cznym z ko÷em to
nXi=0
Z ti+1
ti
�g (s) ds+
ZZR
KdS +
kXj=0
�j = 2�:
Napisac i porównac ze sob ¾a dwa takie wzory dla sfery S = S2 oraz R1 = T -ma÷ego trójk ¾ata i R2 dla jego dope÷nienia R2 = S2�T:
Conclusion 242 Gdy R = S t.j. gdy brzeg @R jest pusty, wówczas brak jestkrzywych Ci i k ¾atów i wówczas �j toZZ
S
KdS = 2� � � (S) :
Znaczy to, ·ze ca÷ka z krzywizny Gaussa powierzchni zwartej orientowalnej jestniezmiennikiem topologicznym.
116

Conclusion 243 Je·zeli obszar regularny R � S jest ograniczony zamkni ¾etymigeodezyjnymi (np. dowolnym trójk ¾atem geodezyjnym) toZZ
R
KdS = 2� � � (R) :
9.3 Zastosowania globalnego Twierdzenia Gaussa-Bonneta
Theorem 244 Zwarta orientowalna powierzchnia o nieujemnej lecz nie wsz ¾edzierównej zeru krzywiznie Gaussa jest homeomor�czna ze sfer ¾a.
Proof. Poniewa·z 2� � � (S) =RRSKdS > 0 to z Tw. (234(4)) wynika, ·ze
jedyn ¾a mo·zliw ¾a wartosci ¾a charakterystyki E-P jest liczba 2 a dalej, ·ze S jesthomeomor�czna ze sfar ¾a.
Theorem 245 Na powierzchni S o krzywiznie � 0 nie istnieje zamkni ¾eta geo-dezyjna ograniczaj ¾aca obszar prosty.
Proof. Niech R � S b¾edzie obszarem prostym ograniczonym geodezyjn ¾a.Poniewa·z charakterystyka E-P obszaru postego jest 1 to ostatniej konkluzjimielibysmy sprzecznosc.
2� =
ZZR
KdS � 0:
Znane jest choc ma trudny dowód Tw. Jordana o rozcinaniu: krzywazamkni¾eta przedzia÷ami regularna bez samoprzeci¾ec na p÷aszczyznie lub na sferzejest brzegiem obszaru prostego (tzn. homeomor�cznego z ko÷em) [krzywa rozcinap÷aszczyzn¾e /sfer¾e/ na dwa obszary których jest brzegiem].
Theorem 246 Je·zeli �1 i �2 s ¾a dwiema zamkni ¾etymi geodezyjnymi na zwartejpowierzchni orientowalnej o dodatniej krzywiznie to geodezyjne te przecinaj ¾a si ¾e�1 \ �2 6= ?:
Proof. Przypuscmy, ·ze si¾e nie przecinaj ¾a. Z pierwszego Twierdzenia tego para-grafu powierzchnia jest homeomor�czna ze sfer ¾a. Twierdzenie Jordana orzeka,·ze �1 i �2 s ¾a brzegami obszarów prostych, przy czym mo·zna je wybrac aby by÷yroz÷¾aczne. Po ich wyci¾eciu ze sferydostajemy obszar R homeomor�czny z cylin-drem ~R = S1 � [0; 1] którego charakterystyka E-P jest równan 0: Z globalnegoTw. Gaussa-Bonneta zastosowanego do cylindra R (oba denka na cylindrze s ¾ana nim geodzyjnymi) dostajemy sprzecznosc
0 = 2� � ��~R�= 2� � � (R) =
ZZR
KdS > 0:
Zastosujemy Tw. globalne do dowolnego trójk ¾ata geodezyjnego, niekonieczniema÷ego. Mo·ze to byc np. zewn¾etrze ma÷ego trójk ¾ata, którego k ¾aty wewn¾etrzne sa2� minus k ¾aty wewn¾etrzne tego ma÷ego trójk ¾ata. Nale·zy zauwa·zyc, ·ze w wierz-cho÷ku dowolnego trójk ¾ata suma k ¾ata wewn¾etrznego � 2 (0; 2�) i zewnetrzenegozorientowanego � 2 (��; �) zawsze jest �; �+ � = �; sk ¾ad � = � � �:
117

Theorem 247 Suma k ¾atów wewn ¾etrznych doowolnego obszaru zwartego T � Sograniczonego trzema odcinkami geodezyjnych (czyli dowolnego trójk ¾ata geo-dezyjnego niekoniecznie ma÷ego) wynosi
3Xj=1
�j =
ZZT
KdS + 3� � 2� � � (T ) :
Je·zeli T jest prosty (homeomor�czny z ko÷em, czy jak kto woli z p÷askim trójk ¾atem)to (� (T ) = 1)
3Xj=1
�j =
ZZT
KdS + �:
Proof. Z Tw. globalnego Gaussa-Bonneta dla obszaru T ograniczonego geo-dezyjnymi dostajemy ZZ
R
KdS +3Xj=1
�j = 2� � � (T ) :
Poniewa·z �j = � � �j toZZR
KdS +3Xj=1
(� � �j) = 2� � � (T )
ZZR
KdS + 3� �3Xj=1
�j = 2� � � (T ) :
Sk ¾ad dostajemy tezeP3
j=1 �j =RRTKdS + 3� � 2� � � (T ) :
Mo·zna powy·zszy rezultat zastosowac do zewn¾etrza ma÷ego trójk ¾ata na sferze,który to obszar tak·ze jest prosty i
P3j=1 �j =
RRTKdS + � co jest zgodne z
wnioskiem z tw Jordana: ka·zdy trójk ¾at na sferze jest prosty. Poniewa·z na sferzeo promieniu r = 1 krzywizn jest 1 to
RRTKdS = jT j : Zatem
3Xj=1
�j = � + jT j :
Dla dowolnych trójkatów prostych T na powierzchniach zorientowanych Smamy zatema)P3
j=1 �j = � gdy K = 0;
b)P3
j=1 �j > � gdy K > 0 (np. na sferze),
c)P3
j=1 �j < � gdy K < 0 (np. na pseudosferze).
118

9.4 UZUPE×NIENIE: Kompleks de Rhama, grupy ko-homologii, charakterystyka Eulera-Poincarégo i genuspowierzchni
Podamy tu de�nicj¾e charakterystyki Eulera-Poincarégo w terminach wymiarówgrup kohomologii oraz wprowadzimy genus (rodzaj) powierzchni [2 wymiarowej].Kompleksem de Rhama hiperpowierzchniM nazywamy ci ¾ag przestrzeni form
ró·zniczkowych k (M) i operatorów dk ró·zniczkowania form
0! 0 (M)d0! 1 (M)
d1! :::dn�2! n�1 (M)
dn�1! n (M)dn=0! 0:
W kompleksie tym z÷o·zenie dwu s ¾asiednich odwzorowan dd daje 0; dd = 0: St ¾adIm dk�1 � ker dk: Iloraz
HkdR (M) := ker d
k= Im dk�1
jest przestrzeni ¾a wektorow ¾a zwan ¾a k-t ¾a grup ¾a kohomologii de Rhama hiper-powierzchni M: Ka·zdy element przestrzeni Hk
dR (M) nazywa si¾e klas ¾a koho-mologii.
De�nition 248 Forma ró·zniczkowa ! nazywa si ¾e zamkni ¾eta gdy d! = 0; tzn.gdy ! 2 ker d:
ker d = f! 2 (M) ; d! = 0g =: Z (M) :
Forma ró·zniczkowa ! nazywa si ¾e dok÷adna (lub zupe÷na) gdy jest ró·zniczk ¾apewnej formy, t.j. gdy ! = d� dla pewnej formy �; tzn. gdy ! 2 Im d.
Im d = f�; 9!� = d!g =: B (M) :
Klas ¾e kohomologii formy zamkni ¾etej ! oznaczamy [!] : Klasa ta jest zerowawtedy i tylko wtedy gdy forma ! jest dok÷adna.
Hk (M) = 0 gddy gdy ka·zda k-forma zamkni¾eta jest dok÷adna. Np. LematPoincarégo mówi, ·ze na otwartym obszarze gwiazdzistym U � Rn ka·zda k-forma(k � 1) zamkni¾eta jest dok÷adna, a tym samym Hk (U) = 0 dla k � 1:Gdy M jest spójna to H0 (M) = R: Istotnie, gdy df = 0 to f = const;
sk ¾ad ker d0 = R i H0 (M) = R=f0g = R: Gdy M jest zwarta i zorientowanan-wymiarowa to Hk (M) �= Hn�k (M) - dualnosc Poincarégo. W szczególnoscigdy M jest spójna, zwarta i zorientowana to Hn (M) = R: Gdy M nie jestzwarta lub jest nieorientowalna to Hn (M) = 0:
Theorem 249 Niech n = dimM: a) Je·zeli M jest spójna to H0 (M) = R; b)je·zeli M jest zwarta i orientowalna to Hn (M) = R; w pozosta÷ych przypadkach(niezwarta lub nieorientowalna) Hn (M) = 0:
Theorem 250 Je·zeli M jest zwart ¾a hiperpowierzchni ¾a to wszystkie grupy ko-homologii Hk (M) s ¾a skonczenie wymiarowe.
119

De�nition 251 Je·zeli Hk (M) jest przestrzeni ¾a skonczenie wymiarow ¾a, to jejwymiar dimHk (M) oznaczamy przez bk;
bk = dimHk (M) ;
i nazywamy k-t ¾a liczb ¾a Bettiego hiperpowierzchni M: Wielomian PM (t) =Pnk=0 bkt
k nazywamy wielomianem Poincarégo hiperpowierzchni M:
Gdy M jest zwarta i zorientowana to bk = bn�k: W szczególnosci b0 = bn:Np. dla okr¾egu S1 mamy H0
�S1�= R =H1
�S1�czyli b0 = b1 = 1: Zatem
wielomian Poincarégo okr¾egu to 1+t: Jest twierdzenie o wielomianie Poincarégodla iloczynu kartezjanskiego M � N; mianowicie PM�N (t) = PM (t) � PN (t) :Rozwa·zmy dla prostego przyk÷adu torus T =S1�S1; jego wielomian Poincarégoto iloczyn wielomianów (1 + t) � (1 + t) = 1 + 2t+ t2 sk ¾ad mamy b1 = 2:
De�nition 252 Je·zeli wszystkie grupy kohomologii Hk (M) s ¾a skonczenie wymi-arowe [np. tak jest dla zwartych hiperpowierzchni] i bk = dimHk (M) s ¾aliczbami Bettiego to liczba
�M =nXk=0
(�1)k bk
nazywa si ¾e charakterystyk ¾a Eulera-Poincarégo hiperpowierzchni M:
Dalej ograniczmy si¾e do n = 2; t.j. powierzchni 2-wymiarowych oznaczanychraczej przez S. Wsród nich s ¾a tzw. powierzchnie Riemanna. Aby je lep-iej zobaczyc, uto·zsamiamy p÷aszczyzn¾e z liczbami zespolonymi R2 = C: Je·zelifunkcje przejscia dla takiej S s ¾a holomor�czne, to S nazywamy powierzchni ¾aRiemanna - s ¾a to rozmaitosci zespolone wymiaru zespolonego 1. Dla powierzchni2-wymairowych
�S = b0 � b1 + b2:Jesli S jest zwarta i zorientowana to b0 = 1 = b2 zatem wtedy �S = 2� b1:
Theorem 253 (Dowód np. u Rotmana): Dla danej powierzchni zwartej S za-chodzi równosc
�S = �F ;
w szczególnosci �F nie zale·zy od wyboru triangulacji.
Teraz dojdziemy do genusu i zwi ¾a·zemy go z �S oraz wyjasnimy jego znacze-nie.Formalnie�dla zwartej orientowalnej powierzchni S genus to liczba
g =2� �S2
ale dalej nie widac co ona oznacza. Za pomoc ¾a liczb Bettiego mamy
g =2� (2� b1)
2=b12:
120

Przyk÷adowo dla sfery S2 mamy H1�S2�= 0 sk ¾ad b1 = 0 i �S1 = b0 � b1 =
0 oraz g = 0: Dla torusa T = S1 � S1 ÷atwo obliczylismy wy·zej b1 = 2 sk ¾ad�T = 2� b1 = 0 i g = 1:
Theorem 254 Ka·zda zwarta powierzchnia S w R3 jest homeomor�czna ze sfer ¾az pewn ¾a ilosci ¾a r ¾aczek (jest wi ¾ec te·z orientowalna) . Sfera z n-r ¾aczkami (n-torus) ma charakterystyk ¾e Eulera-Poincarégo � = 2 � 2n: St ¾ad liczba r ¾aczek ndla powierzchni S o charakterystyce Eulera-Poincarégo �S wynosi
2� �S2
i jest to w÷asnie genus powierzchni S:
121