Dynamika, stabilność i dokładność układu ze sprzężeniem...
7
PRz – AiRA 1 Dynamika, stabilność i dokładność układu ze sprzężeniem zwrotnym 1. Dynamika i stabilność układu ze sprzężeniem zwrotnym
Transcript of Dynamika, stabilność i dokładność układu ze sprzężeniem...

PRz – AiRA
1
Dynamika, stabilność i dokładność układu ze sprzężeniem
zwrotnym
1. Dynamika i stabilność układu ze sprzężeniem zwrotnym

PRz – AiRA
2
Uwaga
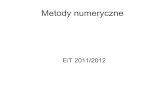
Pojawienie się dodatkowego bieguna w transmitancji układu zamkniętego powoduje
wydłużenie czasu regulacji i zwiększenie czasu narastania (niekorzystne), może jednak
powodować zmniejszenie przeregulowania (korzystne).
L=1;
M=[1 1 1];
roots(M)
t=0:0.01:14;
y=step(L,M,t);
ym=step(L,conv(M,[0.1 1]),t);
ys=step(L,conv(M,[0.7 1]),t);
yd=step(L,conv(M,[4 1]),t);
plot(t,y,'b-',t,ym,'r-',t,yd,'g-',t,ys,'k-');grid
Pojawienie się dodatkowego zera w transmitancji układu zamkniętego powoduje wzrost
przeregulowania nie wpływając znacząco na czas regulacji (niekorzystne).
L=1;
M=[1 1 1];
roots(M)
t=0:0.01:14;
y=step(L,M,t);
yd=step(conv(L,[1 1 ]),M,t);
plot(t,y,'b-',t,yd,'r-');grid
0 2 4 6 8 10 12 140
0.2
0.4
0.6
0.8
1
0 2 4 6 8 10 12 140
0.2
0.4
0.6
0.8
1
1.2
1.4

PRz – AiRA
3

PRz – AiRA
4
2. Dokładność układu ze sprzężeniem zwrotnym

PRz – AiRA
5
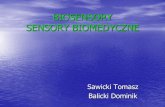
W systemach sterowania obrabiarek CNC zastosowanie regulatorów wprowadzających błędy
śledzenia trajektorii wpływa na błędy realizacji detali.
Schemat symulacyjny:
Realizacja trajektorii kołowej i kwadratowej w układzie z filtrem wstępnym i bez filtru.
y axis
u pos
x axis
u pos
sin
cos
Step 1
Step
Scope 2
Scope 1
Repeating
Sequence 1
Repeating
Sequence
PreFilter 1
xalpha
s+xalpha
PreFilter
yalpha
s+yalpha
PID y
PID
PID x
PID
switch1
switch
2
2
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.94 0.95 0.96 0.97 0.98 0.99 1 1.01 1.02 1.03 1.04
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.955 0.96 0.965 0.97 0.975 0.98 0.985 0.99 0.995 1 1.005
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

PRz – AiRA
6
Schemat symulacyjny

PRz – AiRA
7
„Poprzedzać punkt wejścia” – dotyczy toru głównego.