6 do SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA - Elektrycznych w ... · 2 3. Mikrometr zewnętrzny 0 - 25 mm...
18
Załącznik nr 6 do SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA „Dostawa i montaż wyposażenia w Zespole Szkół Mechaniczno - Elektrycznych w ramach zadania pn.: „Modernizacja infrastruktury edukacyjnej wspierająca dostosowanie do lokalnego rynku pracy”” 1. Dla części zamówienia nr 1 – „Pracownia technologii mechanicznej i rysunku technicznego”: Nazwa pracowni Nazwa wyposażenia Charakterystyka wyposażenia Ilość [komplet] Pracownia technologii mechanicznej i rysunku technicznego Stanowisko dydaktyczno - egzaminacyjn e technologii mechanicznej Stanowisko dydaktyczno - egzaminacyjne technologii mechanicznej obejmujące szafę metalową warsztatową zamontowaną w sali i wyposażoną w narzędzia i przyrządy pomiarowe. SPRZĘT POWINIEN BYĆ KOMPATYBILNY Z ISTNIEJĄCĄ W SZKOLE INFRASTRUKTURĄ, TECHNOLOGIĄ SPRZĘTU ORAZ WYKORZYSTYWANYM OPROGRAMOWANIEM. Gwarancja minimum 24 miesiące 8 Specyfikacja sprzętu: Lp. Niezbędne wyposażenie Ilość (szt.) Dodatkowe parametry 1. Głębokościomierz suwmiarkowy: Głębokość mierzona (mm): 80 Długość poprzeczki (mm): 50 6 Głębokość mierzona (mm): 80 Długość poprzeczki (mm): 50 Ze stali nierdzewnej. Podziałka chromowana na matowo. Z wymiennym, hartowanym trzpieniem stalowym. Podziałka w mm, wyposażona w noniusz o rozdzielczości 1/20 mm. Z zaciskiem ustalającym. Tolerancja wg DIN 862 lub równoważnej. 2. Wysokościomierz suwmiarkowy L=300 mm, noniusz 0,02 mm albo 0,05 mm 3 Wykonanie precyzyjne. Podziałka chromowana na matowo. Wyskalowanie w mm. Ze śrubą dokładnej regulacji i noniuszem o rozdzielczości 0,02 mm albo 0.05 mm. Zgodność z DIN 862 lub równoważną.
-
Upload
nguyenkhanh -
Category
Documents
-
view
216 -
download
0
Transcript of 6 do SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA - Elektrycznych w ... · 2 3. Mikrometr zewnętrzny 0 - 25 mm...

Załącznik nr 6 do SIWZ
OPIS PRZEDMIOTU ZAMÓWIENIA
„Dostawa i montaż wyposażenia w Zespole Szkół Mechaniczno - Elektrycznych w ramach zadania
pn.: „Modernizacja infrastruktury edukacyjnej wspierająca dostosowanie do lokalnego rynku pracy””
1. Dla części zamówienia nr 1 – „Pracownia technologii mechanicznej i rysunku technicznego”:
Nazwa
pracowni
Nazwa
wyposażenia Charakterystyka wyposażenia
Ilość
[komplet]
Pracownia
technologii
mechanicznej
i rysunku
technicznego
Stanowisko
dydaktyczno -
egzaminacyjn
e technologii
mechanicznej
Stanowisko dydaktyczno - egzaminacyjne technologii mechanicznej obejmujące szafę metalową
warsztatową zamontowaną w sali i wyposażoną w narzędzia i przyrządy pomiarowe.
SPRZĘT POWINIEN BYĆ KOMPATYBILNY Z ISTNIEJĄCĄ W SZKOLE
INFRASTRUKTURĄ, TECHNOLOGIĄ SPRZĘTU ORAZ WYKORZYSTYWANYM
OPROGRAMOWANIEM.
Gwarancja minimum 24 miesiące
8
Specyfikacja sprzętu:
Lp. Niezbędne wyposażenie Ilość
(szt.) Dodatkowe parametry
1.
Głębokościomierz suwmiarkowy:
Głębokość mierzona (mm): 80
Długość poprzeczki (mm): 50
6
Głębokość mierzona (mm): 80 Długość poprzeczki (mm): 50
Ze stali nierdzewnej. Podziałka chromowana na matowo. Z wymiennym, hartowanym
trzpieniem stalowym. Podziałka w mm, wyposażona w noniusz o rozdzielczości 1/20 mm. Z
zaciskiem ustalającym. Tolerancja wg DIN 862 lub równoważnej.
2.
Wysokościomierz suwmiarkowy
L=300 mm, noniusz 0,02 mm albo
0,05 mm
3
Wykonanie precyzyjne. Podziałka chromowana na matowo. Wyskalowanie w mm. Ze śrubą
dokładnej regulacji i noniuszem o rozdzielczości 0,02 mm albo 0.05 mm. Zgodność z DIN 862
lub równoważną.
2
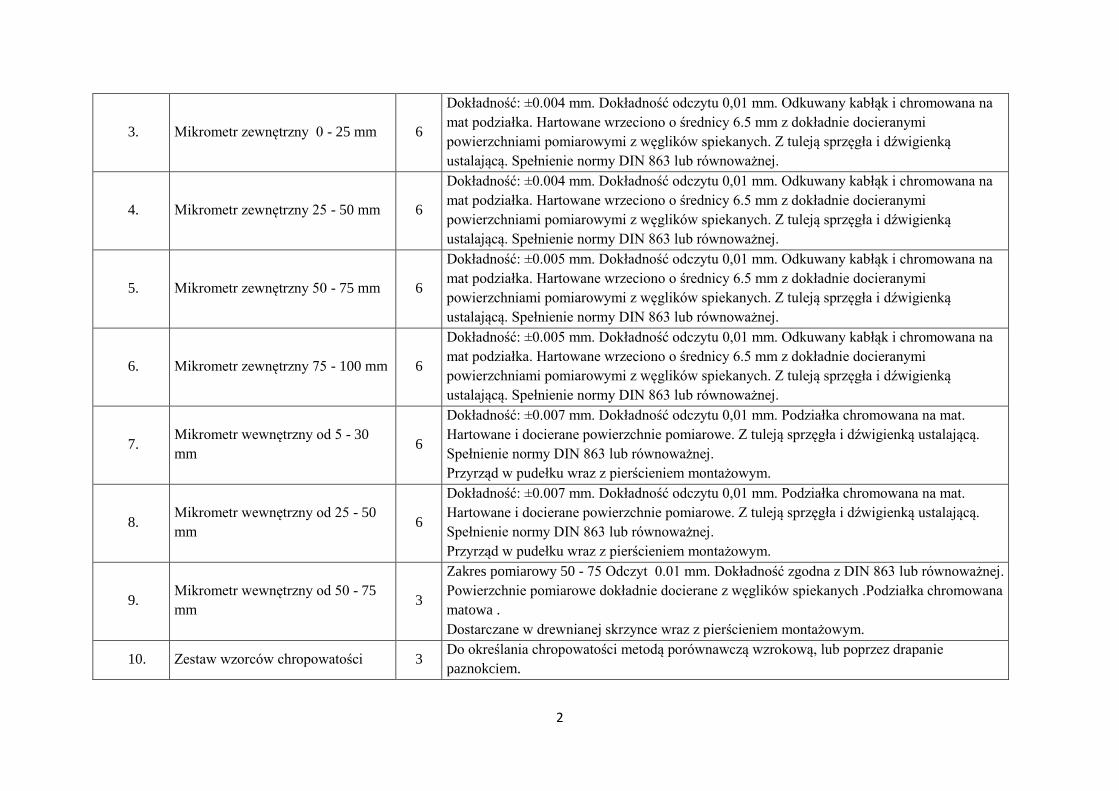
3. Mikrometr zewnętrzny 0 - 25 mm 6
Dokładność: ±0.004 mm. Dokładność odczytu 0,01 mm. Odkuwany kabłąk i chromowana na
mat podziałka. Hartowane wrzeciono o średnicy 6.5 mm z dokładnie docieranymi
powierzchniami pomiarowymi z węglików spiekanych. Z tuleją sprzęgła i dźwigienką
ustalającą. Spełnienie normy DIN 863 lub równoważnej.
4. Mikrometr zewnętrzny 25 - 50 mm 6
Dokładność: ±0.004 mm. Dokładność odczytu 0,01 mm. Odkuwany kabłąk i chromowana na
mat podziałka. Hartowane wrzeciono o średnicy 6.5 mm z dokładnie docieranymi
powierzchniami pomiarowymi z węglików spiekanych. Z tuleją sprzęgła i dźwigienką
ustalającą. Spełnienie normy DIN 863 lub równoważnej.
5. Mikrometr zewnętrzny 50 - 75 mm 6
Dokładność: ±0.005 mm. Dokładność odczytu 0,01 mm. Odkuwany kabłąk i chromowana na
mat podziałka. Hartowane wrzeciono o średnicy 6.5 mm z dokładnie docieranymi
powierzchniami pomiarowymi z węglików spiekanych. Z tuleją sprzęgła i dźwigienką
ustalającą. Spełnienie normy DIN 863 lub równoważnej.
6. Mikrometr zewnętrzny 75 - 100 mm 6
Dokładność: ±0.005 mm. Dokładność odczytu 0,01 mm. Odkuwany kabłąk i chromowana na
mat podziałka. Hartowane wrzeciono o średnicy 6.5 mm z dokładnie docieranymi
powierzchniami pomiarowymi z węglików spiekanych. Z tuleją sprzęgła i dźwigienką
ustalającą. Spełnienie normy DIN 863 lub równoważnej.
7. Mikrometr wewnętrzny od 5 - 30
mm 6
Dokładność: ±0.007 mm. Dokładność odczytu 0,01 mm. Podziałka chromowana na mat.
Hartowane i docierane powierzchnie pomiarowe. Z tuleją sprzęgła i dźwigienką ustalającą.
Spełnienie normy DIN 863 lub równoważnej.
Przyrząd w pudełku wraz z pierścieniem montażowym.
8. Mikrometr wewnętrzny od 25 - 50
mm 6
Dokładność: ±0.007 mm. Dokładność odczytu 0,01 mm. Podziałka chromowana na mat.
Hartowane i docierane powierzchnie pomiarowe. Z tuleją sprzęgła i dźwigienką ustalającą.
Spełnienie normy DIN 863 lub równoważnej.
Przyrząd w pudełku wraz z pierścieniem montażowym.
9. Mikrometr wewnętrzny od 50 - 75
mm 3
Zakres pomiarowy 50 - 75 Odczyt 0.01 mm. Dokładność zgodna z DIN 863 lub równoważnej.
Powierzchnie pomiarowe dokładnie docierane z węglików spiekanych .Podziałka chromowana
matowa .
Dostarczane w drewnianej skrzynce wraz z pierścieniem montażowym.
10. Zestaw wzorców chropowatości 3 Do określania chropowatości metodą porównawczą wzrokową, lub poprzez drapanie
paznokciem.

3
Zakresy Ra = 12.5 6.3 3.2 1.6 0.8 0.4 1.6 0.8 0.4 0.2 0.1 0.005
11. Sprawdzian grzebieniowy do
gwintów rurowych 6 6 płytek odchylanych, hartowanych. Do gwintów rurowych G wewnętrznych i zewnętrznych.
12. Sprawdzian grzebieniowy do
gwintów metrycznych 6
24 płytki odchylane, hartowane. Do gwintów metrycznych wewnętrznych i zewnętrznych o
skoku od 0.25 mm do 6 mm
13. Mikrometr do pomiaru gwintów 0 -
25 mm 3
Dokładność: ±0.004 mm. Dokładność odczytu 0,01 mm. Kabłąk odkuwany, podziałka
chromowana na mat.
Hartowane wrzeciono z wymiennymi końcówkami pomiarowymi dla poszczególnych skoków
gwintów. Tuleja ze sprzęgłem ciernym, dźwigienka ustalająca. Spełnienie normy DIN 863 lub
równoważnej.
14. Mikrometr do pomiaru gwintów 25 -
50 mm 3
Dokładność: ±0.004 mm. Dokładność odczytu 0,01 mm. . Kabłąk odkuwany, podziałka
chromowana na mat. Hartowane wrzeciono z wymiennymi końcówkami pomiarowymi dla
poszczególnych skoków gwintów. Tuleja ze sprzęgłem ciernym, dźwigienka ustalająca.
Spełnienie normy DIN 863 lub równoważnej.
15. Mikrometr do pomiaru gwintów 50 -
75 mm 3
Dokładność: ±0.004 mm. Dokładność odczytu 0,01 mm. . Kabłąk odkuwany, podziałka
chromowana na mat. Hartowane wrzeciono z wymiennymi końcówkami pomiarowymi dla
poszczególnych skoków gwintów. Tuleja ze sprzęgłem ciernym, dźwigienka ustalająca.
Spełnienie normy DIN 863 lub równoważnej.
16. Promieniomierz od 1 - 7 mm 6
Z odchylanymi płytkami do pomiaru promieni powierzchni zaokrąglonych, wklęsłych i
wypukłych.
Ilość ostrzy szt.: 17 wklęsłych + 17 wypukłych
Średnice co: (1-3)=0.25mm (3-17)=0.5 mm
17. Promieniomierz od 7,5 - 15 mm 6
Z odchylanymi płytkami do pomiaru promieni powierzchni zaokrąglonych, wklęsłych i
wypukłych.
Ilość ostrzy szt.: 16 wklęsłych + 16 wypukłych
Średnice co: 0.5 mm
18. Szczelinomierz płytkowy 20 ostrzy,
zakres pomiarowy 0.05-1.00 6 20 ostrzy, zakres pomiarowy 0.05-1.00, długość płytek 100 mm
19. Suwmiarka modułowa analogowa 3 Ze stali nierdzewnej.
4
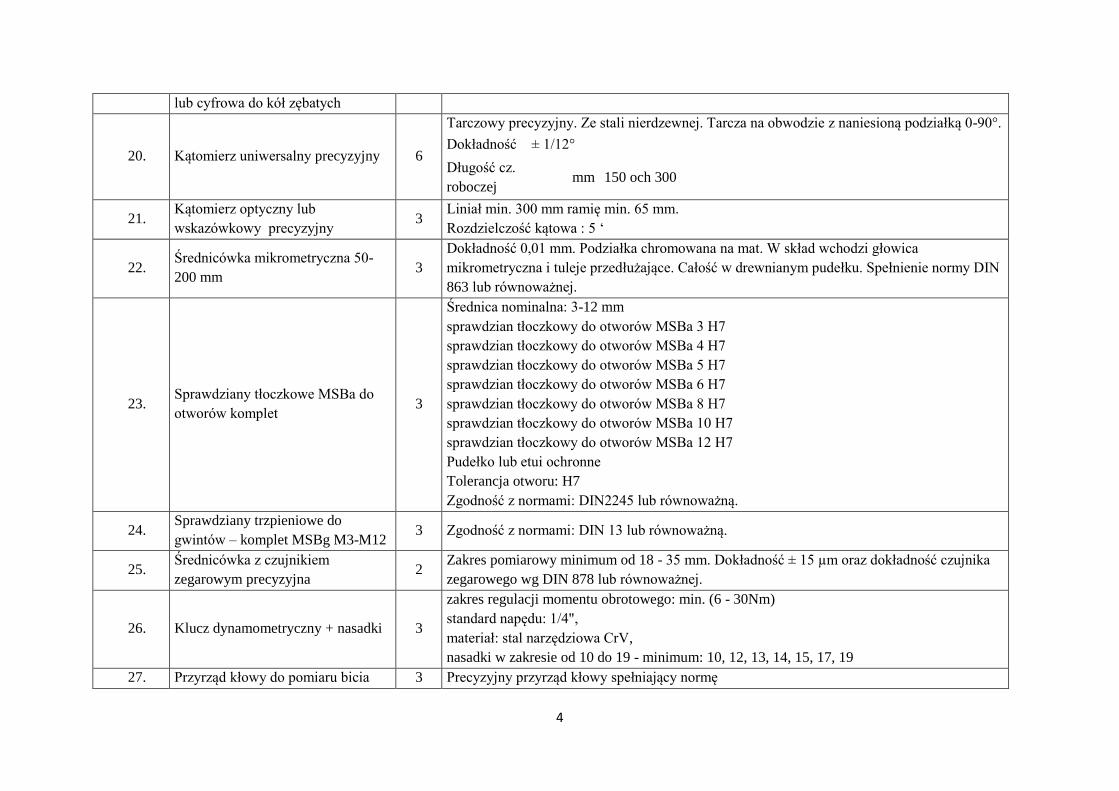
lub cyfrowa do kół zębatych
20. Kątomierz uniwersalny precyzyjny 6
Tarczowy precyzyjny. Ze stali nierdzewnej. Tarcza na obwodzie z naniesioną podziałką 0-90°.
Dokładność
± 1/12°
Długość cz.
roboczej mm 150 och 300
21. Kątomierz optyczny lub
wskazówkowy precyzyjny 3
Liniał min. 300 mm ramię min. 65 mm.
Rozdzielczość kątowa : 5 ‘
22. Średnicówka mikrometryczna 50-
200 mm 3
Dokładność 0,01 mm. Podziałka chromowana na mat. W skład wchodzi głowica
mikrometryczna i tuleje przedłużające. Całość w drewnianym pudełku. Spełnienie normy DIN
863 lub równoważnej.
23. Sprawdziany tłoczkowe MSBa do
otworów komplet 3
Średnica nominalna: 3-12 mm
sprawdzian tłoczkowy do otworów MSBa 3 H7
sprawdzian tłoczkowy do otworów MSBa 4 H7
sprawdzian tłoczkowy do otworów MSBa 5 H7
sprawdzian tłoczkowy do otworów MSBa 6 H7
sprawdzian tłoczkowy do otworów MSBa 8 H7
sprawdzian tłoczkowy do otworów MSBa 10 H7
sprawdzian tłoczkowy do otworów MSBa 12 H7
Pudełko lub etui ochronne
Tolerancja otworu: H7
Zgodność z normami: DIN2245 lub równoważną.
24. Sprawdziany trzpieniowe do
gwintów – komplet MSBg M3-M12 3 Zgodność z normami: DIN 13 lub równoważną.
25. Średnicówka z czujnikiem
zegarowym precyzyjna 2
Zakres pomiarowy minimum od 18 - 35 mm. Dokładność ± 15 µm oraz dokładność czujnika
zegarowego wg DIN 878 lub równoważnej.
26. Klucz dynamometryczny + nasadki 3
zakres regulacji momentu obrotowego: min. (6 - 30Nm)
standard napędu: 1/4",
materiał: stal narzędziowa CrV,
nasadki w zakresie od 10 do 19 - minimum: 10, 12, 13, 14, 15, 17, 19
27. Przyrząd kłowy do pomiaru bicia 3 Precyzyjny przyrząd kłowy spełniający normę
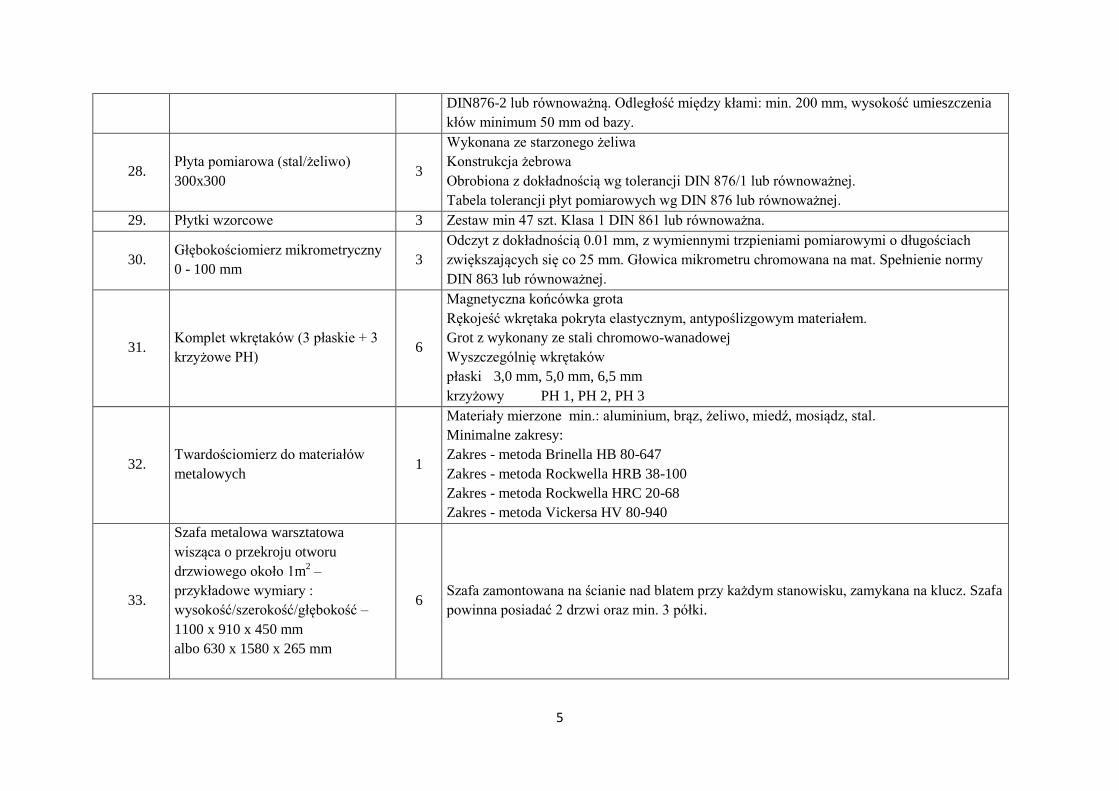
5
DIN876-2 lub równoważną. Odległość między kłami: min. 200 mm, wysokość umieszczenia
kłów minimum 50 mm od bazy.
28. Płyta pomiarowa (stal/żeliwo)
300x300 3
Wykonana ze starzonego żeliwa
Konstrukcja żebrowa
Obrobiona z dokładnością wg tolerancji DIN 876/1 lub równoważnej.
Tabela tolerancji płyt pomiarowych wg DIN 876 lub równoważnej.
29. Płytki wzorcowe 3 Zestaw min 47 szt. Klasa 1 DIN 861 lub równoważna.
30. Głębokościomierz mikrometryczny
0 - 100 mm 3
Odczyt z dokładnością 0.01 mm, z wymiennymi trzpieniami pomiarowymi o długościach
zwiększających się co 25 mm. Głowica mikrometru chromowana na mat. Spełnienie normy
DIN 863 lub równoważnej.
31. Komplet wkrętaków (3 płaskie + 3
krzyżowe PH) 6
Magnetyczna końcówka grota
Rękojeść wkrętaka pokryta elastycznym, antypoślizgowym materiałem.
Grot z wykonany ze stali chromowo-wanadowej
Wyszczególnię wkrętaków
płaski 3,0 mm, 5,0 mm, 6,5 mm
krzyżowy PH 1, PH 2, PH 3
32. Twardościomierz do materiałów
metalowych 1
Materiały mierzone min.: aluminium, brąz, żeliwo, miedź, mosiądz, stal.
Minimalne zakresy:
Zakres - metoda Brinella HB 80-647
Zakres - metoda Rockwella HRB 38-100
Zakres - metoda Rockwella HRC 20-68
Zakres - metoda Vickersa HV 80-940
33.
Szafa metalowa warsztatowa
wisząca o przekroju otworu
drzwiowego około 1m2 –
przykładowe wymiary :
wysokość/szerokość/głębokość –
1100 x 910 x 450 mm
albo 630 x 1580 x 265 mm
6 Szafa zamontowana na ścianie nad blatem przy każdym stanowisku, zamykana na klucz. Szafa
powinna posiadać 2 drzwi oraz min. 3 półki.
6
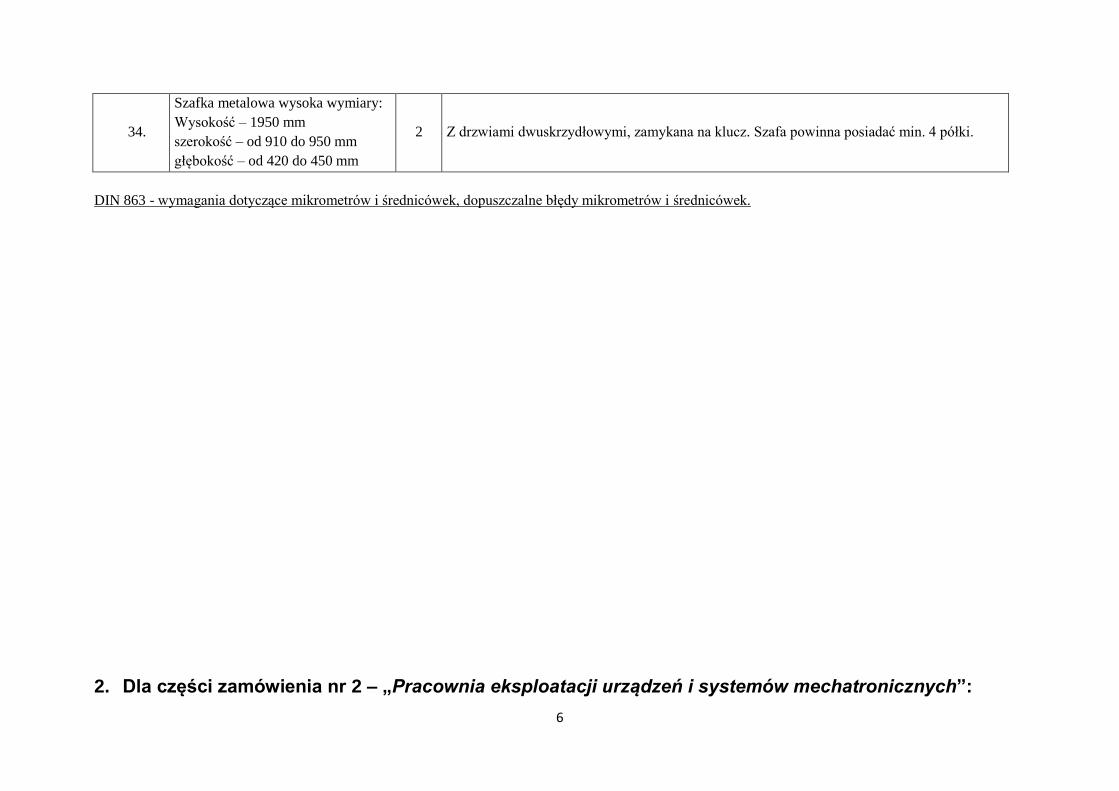
34.
Szafka metalowa wysoka wymiary:
Wysokość – 1950 mm
szerokość – od 910 do 950 mm
głębokość – od 420 do 450 mm
2 Z drzwiami dwuskrzydłowymi, zamykana na klucz. Szafa powinna posiadać min. 4 półki.
DIN 863 - wymagania dotyczące mikrometrów i średnicówek, dopuszczalne błędy mikrometrów i średnicówek.
2. Dla części zamówienia nr 2 – „Pracownia eksploatacji urządzeń i systemów mechatronicznych”:
7
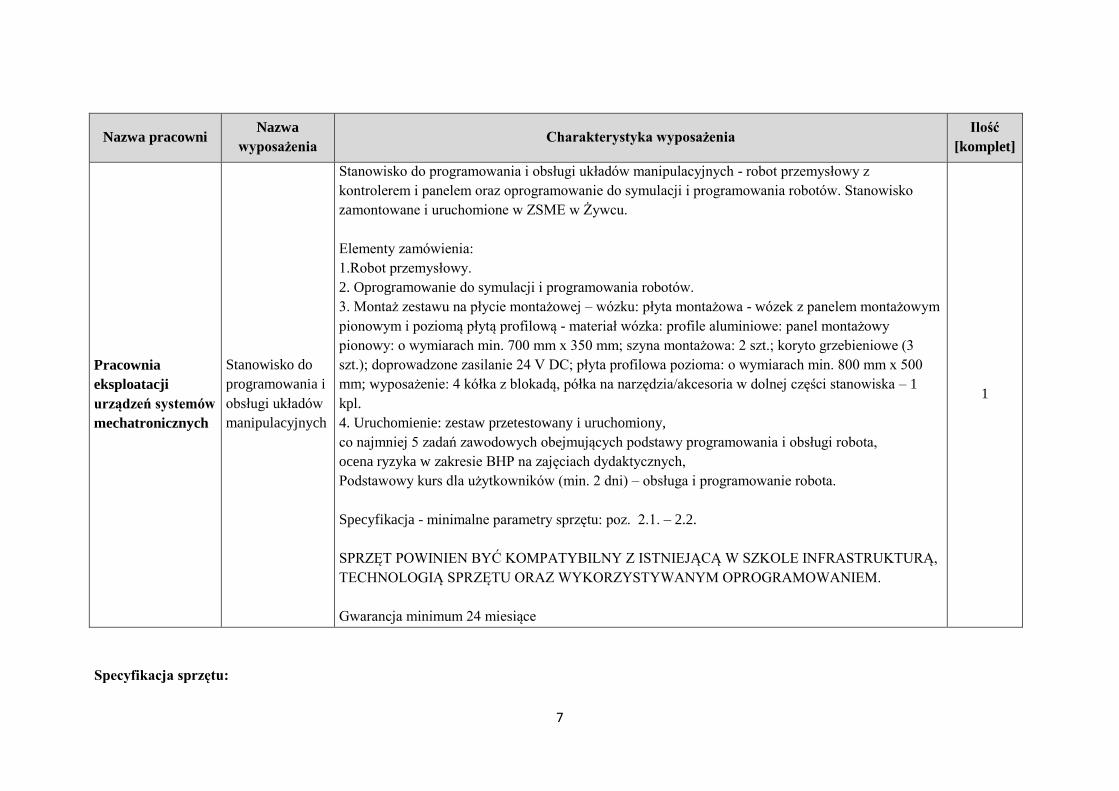
Nazwa pracowni Nazwa
wyposażenia Charakterystyka wyposażenia
Ilość
[komplet]
Pracownia
eksploatacji
urządzeń systemów
mechatronicznych
Stanowisko do
programowania i
obsługi układów
manipulacyjnych
Stanowisko do programowania i obsługi układów manipulacyjnych - robot przemysłowy z
kontrolerem i panelem oraz oprogramowanie do symulacji i programowania robotów. Stanowisko
zamontowane i uruchomione w ZSME w Żywcu.
Elementy zamówienia:
1.Robot przemysłowy.
2. Oprogramowanie do symulacji i programowania robotów.
3. Montaż zestawu na płycie montażowej – wózku: płyta montażowa - wózek z panelem montażowym
pionowym i poziomą płytą profilową - materiał wózka: profile aluminiowe: panel montażowy
pionowy: o wymiarach min. 700 mm x 350 mm; szyna montażowa: 2 szt.; koryto grzebieniowe (3
szt.); doprowadzone zasilanie 24 V DC; płyta profilowa pozioma: o wymiarach min. 800 mm x 500
mm; wyposażenie: 4 kółka z blokadą, półka na narzędzia/akcesoria w dolnej części stanowiska – 1
kpl.
4. Uruchomienie: zestaw przetestowany i uruchomiony,
co najmniej 5 zadań zawodowych obejmujących podstawy programowania i obsługi robota,
ocena ryzyka w zakresie BHP na zajęciach dydaktycznych,
Podstawowy kurs dla użytkowników (min. 2 dni) – obsługa i programowanie robota.
Specyfikacja - minimalne parametry sprzętu: poz. 2.1. – 2.2.
SPRZĘT POWINIEN BYĆ KOMPATYBILNY Z ISTNIEJĄCĄ W SZKOLE INFRASTRUKTURĄ,
TECHNOLOGIĄ SPRZĘTU ORAZ WYKORZYSTYWANYM OPROGRAMOWANIEM.
Gwarancja minimum 24 miesiące
1
Specyfikacja sprzętu:
8
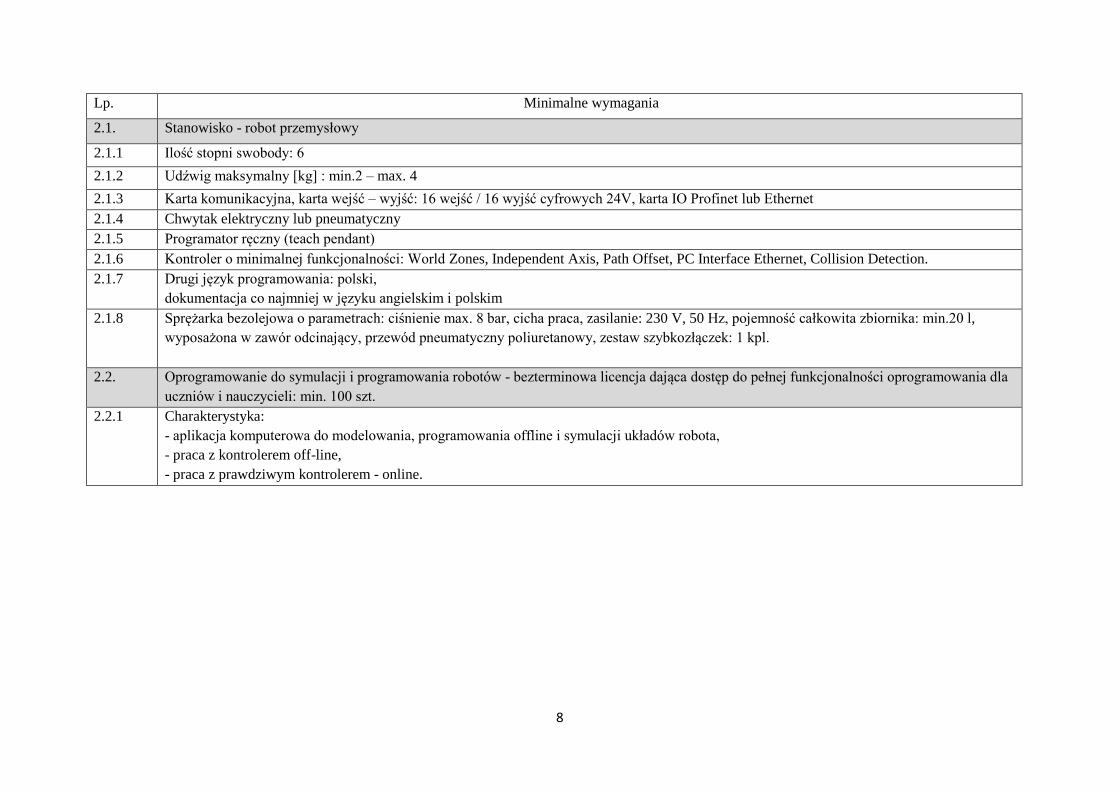
Lp. Minimalne wymagania
2.1. Stanowisko - robot przemysłowy
2.1.1 Ilość stopni swobody: 6
2.1.2 Udźwig maksymalny [kg] : min.2 – max. 4
2.1.3 Karta komunikacyjna, karta wejść – wyjść: 16 wejść / 16 wyjść cyfrowych 24V, karta IO Profinet lub Ethernet
2.1.4 Chwytak elektryczny lub pneumatyczny
2.1.5 Programator ręczny (teach pendant)
2.1.6 Kontroler o minimalnej funkcjonalności: World Zones, Independent Axis, Path Offset, PC Interface Ethernet, Collision Detection.
2.1.7 Drugi język programowania: polski,
dokumentacja co najmniej w języku angielskim i polskim
2.1.8 Sprężarka bezolejowa o parametrach: ciśnienie max. 8 bar, cicha praca, zasilanie: 230 V, 50 Hz, pojemność całkowita zbiornika: min.20 l,
wyposażona w zawór odcinający, przewód pneumatyczny poliuretanowy, zestaw szybkozłączek: 1 kpl.
2.2. Oprogramowanie do symulacji i programowania robotów - bezterminowa licencja dająca dostęp do pełnej funkcjonalności oprogramowania dla
uczniów i nauczycieli: min. 100 szt.
2.2.1 Charakterystyka:
- aplikacja komputerowa do modelowania, programowania offline i symulacji układów robota,
- praca z kontrolerem off-line,
- praca z prawdziwym kontrolerem - online.

9
3. Dla części zamówienia nr 3 – „Stanowiska do badania napędów elektrycznych i sterowania
procesów”:
Nazwa pracowni Nazwa
wyposażenia Charakterystyka wyposażenia
Ilość
[komplet]
Pracowania
montażu i
eksploatacji
maszyn,
instalacji
elektrycznych
oraz instalacji
urządzeń
elektronicznych
Stanowiska do
testowania
maszyn
elektrycznych
(3 trenażery)
Stanowiska do testowania maszyn elektrycznych - z osprzętem, zabudowane i uruchomione. Szczegółowa
charakterystyka funkcji:
- poszukiwanie błędów i uszkodzeń w maszynach elektrycznych,
- badanie silników asynchronicznych z wirnikiem: klatkowym, z magnesem trwałym, z uzwojeniem
otwartym.
- badanie silników synchronicznych wirnikiem: pierścieniowym, synchronicznym, reluktancyjnym.
Na jeden komplet składają się 3 trenażery.
Specyfikacja dodatkowe parametry sprzętu: poz. 1.1 – 1.3
SPRZĘT POWINIEN BYĆ KOMPATYBILNY Z ISTNIEJĄCĄ W SZKOLE INFRASTRUKTURĄ,
TECHNOLOGIĄ SPRZĘTU ORAZ WYKORZYSTYWANYM OPROGRAMOWANIEM:
w szkole wykorzystywane są stanowiska Uni Train z oprogramowaniem, dostarczony sprzęt powinien
być kompatybilny z obecnym wyposażeniem.
Gwarancja minimum 24 miesiące
1
Stanowisko
pomiarowe
obwodów
elektrycznych
Stanowisko pomiarowe obwodów elektrycznych - z osprzętem, zabudowane i uruchomione .
Szczegółowa charakterystyka:
1. Stanowisko bazowe + trenażery z układami elektrycznymi i elektronicznymi przystosowane do badań i
pomiarów: napięcia, natężenia prądu, rezystancji, pojemności, indukcyjności, częstotliwości, mocy;
2. Oprogramowanie komputerowe umożliwiające symulację obwodów elektrycznych.
Na jeden komplet składa się interfejs pomiarowy, stanowisko doświadczalne i akcesoria pomiarowe.
2
10
Specyfikacja dodatkowe parametry sprzętu: poz. 2.1 – 2.3
SPRZĘT POWINIEN BYĆ KOMPATYBILNY Z ISTNIEJĄCĄ W SZKOLE INFRASTRUKTURĄ,
TECHNOLOGIĄ SPRZĘTU ORAZ WYKORZYSTYWANYM OPROGRAMOWANIEM:
w szkole wykorzystywane są stanowiska Uni Train z oprogramowaniem, dostarczony sprzęt powinien
być kompatybilny z obecnym wyposażeniem.
Gwarancja minimum 24 miesiące
Pracownia
eksploatacji
urządzeń
systemów
mechatronicznyc
h
Stanowisko
dydaktyczno -
egzaminacyjne
do obsługi
układów
wykonawczych
opartych na
urządzeniach o
napędzie
elektrycznym
(4 trenażery)
Stanowisko dydaktyczno - egzaminacyjne do obsługi układów wykonawczych opartych na urządzeniach
o napędzie elektrycznym z osprzętem, zabudowane i uruchomione.
Charakterystyka wyposażenia:
1. napęd zasilany z z przetwornicy częstotliwości,
2. napęd z silnikiem krokowym,
3. napęd z silnikiem BLCD (serwomotor),
4. napęd z silnikiem liniowym.
Na jeden komplet składają się 4 trenażery.
Specyfikacja dodatkowe parametry sprzętu: poz. 3.1 – 3.4
SPRZĘT POWINIEN BYĆ KOMPATYBILNY Z ISTNIEJĄCĄ W SZKOLE INFRASTRUKTURĄ,
TECHNOLOGIĄ SPRZĘTU ORAZ WYKORZYSTYWANYM OPROGRAMOWANIEM.
Gwarancja minimum 24 miesiące
1
Stanowisko do
badania
procesów
ciągłych
(obiekt
Charakterystyka:
1. Obiekty regulacji:
• temperatury,
1
11
regulacji oraz
układ regulacji
i sterowania)
• poziomu,
• pozycji,
• prędkości,
• oświetlenia.
2. Układy regulacji i sterowania:
• z otwartą i zamkniętą pętlą sterującą,
• z użyciem kontrolerów impulsowych i ciągłych,
• pozycji na osi liniowej,
• kontrolerów: P, I, D oraz ich kombinacji,
• analogowego kontrolera PID.
Na jeden komplet składa się obiekt regulacji oraz układ regulacji i sterowania.
Specyfikacja dodatkowe parametry sprzętu: poz. 4.1 – 4.2
SPRZĘT POWINIEN BYĆ KOMPATYBILNY Z ISTNIEJĄCĄ W SZKOLE INFRASTRUKTURĄ,
TECHNOLOGIĄ SPRZĘTU ORAZ WYKORZYSTYWANYM OPROGRAMOWANIEM.
Gwarancja minimum 24 miesiące
Specyfikacja sprzętu:
Lp. Przedmiot Ilość / j.m.
1. Stanowiska do testowania maszyn elektrycznych, w tym: 1 kpl.
1.1 Badanie maszyn asynchronicznych – trenażer z oprogramowaniem. 1 kpl.
1.2 Badanie maszyn synchronicznych i pierścieniowych – trenażer z oprogramowaniem. 1 kpl.
1.3 Prostowniki samosterowalne – trenażer z oprogramowaniem. 1 kpl.
2. Stanowiska pomiarowe obwodów elektrycznych, w tym: 2 kpl.
2.1 Interfejs pomiarowy z wirtualnymi instrumentami. 2 szt.
12
2.2 Stanowisko doświadczalne. 2 szt.
2.3 Akcesoria pomiarowe. 2 szt.
3. Stanowiska dydaktyczno - egzaminacyjne do obsługi układów wykonawczych opartych na urządzeniach o napędzie
elektrycznym, w tym:
1 kpl.
3.1 Napęd zasilany z z przetwornicy częstotliwości – trenażer z oprogramowaniem. 1 kpl.
3.2 Napęd z silnikiem krokowym – trenażer z oprogramowaniem. 1 kpl.
3.3 Napęd z silnikiem BLCD (serwomotor) – trenażer z oprogramowaniem. 1 kpl.
3.4 Napęd z silnikiem liniowym – trenażer z oprogramowaniem. 1 kpl.
4. Stanowisko do badania procesów ciągłych, w tym: 1 kpl.
4.1 Obiekty regulacji: temperatury, poziomu, pozycji, prędkości, oświetlenia. 1 kpl.
4.2. Układy regulacji i sterowania: z otwartą i zamkniętą pętlą sterującą, z użyciem kontrolerów impulsowych i ciągłych, pozycji na
osi liniowej, kontrolerów: P, I, D oraz ich kombinacji, analogowego kontrolera PID.
1 kpl.
Dodatkowe parametry:
1.1. Badanie maszyn asynchronicznych – trenażer z oprogramowaniem:
• karta stanowiska doświadczalnego ze stojanem z uzwojeniem trójfazowym, kondensatorami rozruchowymi i roboczymi, czujnikami temperatury,
• wirniki: wirnik klatkowy, wirnik z magnesem trwałym, wirnik z uzwojeniem otwartym.
Treści nauczania:
• zapoznanie z najważniejszymi elementami maszyn o wirującym polu magnetycznym: wirnik i stojan,
• doświadczalne udowodnienie powstawania momentu obrotowego i zasady działania prądnicy,
• zasada działania transformatora obrotowego,
• pomiarowe badanie maszyny o wirującym polu magnetycznym przy połączeniu w gwiazdę i w trójkąt,
• pomiar prądu i napięcia międzyprzewodowego i fazowego,
• pomiar prądu i napięcia wirnika,
• pomiarowe badanie charakterystyki roboczej o wirniku z magnesem trwałym,
• pomiarowe badanie charakterystyki roboczej silnika kondensatorowego,
• pomiar temperatury uzwojenia przy pracującej maszynie,
• wyszukiwanie błędów - możliwość aktywowania błędów.

13
1.2. Badanie maszyn synchronicznych i pierścieniowych – trenażer z oprogramowaniem:
• karta stanowiska doświadczalnego ze stojanem z uzwojeniem trójfazowym oraz opornikami rozruchowymi maszyny pierścieniowej,
• wirniki: wirnik pierścieniowy, wirnik synchroniczny i wirnik reluktancyjny,
• stroboskop – do pomiaru obrotów.
Treści nauczania:
• zapoznanie z najważniejszymi elementami maszyn synchronicznych, pierścieniowych i reluktancyjnych (m.in. wirnik jawnobiegunowy, wirnik
pełnobiegunowy, wirnik reluktancyjny),
• zapoznanie ze schematem połączeń, schematem montażowym i danymi znamionowymi maszyn synchronicznych, pierścieniowych i reluktancyjnych,
• zapoznanie z zasadą zmiany liczby obrotów maszyny pierścieniowej,
• doświadczalne badanie charakterystyki roboczej maszyny pierścieniowej: pomiar napięć wirnika przy otwartym i zwartym wirniku, zachowanie z
opornikami rozruchowymi, wyznaczenie poślizgu i liczby obrotów za pomocą pomiarów napięcia,
• zapoznanie z zasadą zmiany liczby obrotów maszyny synchronicznej,
• doświadczalne badanie charakterystyki roboczej maszyny synchronicznej: charakterystyka rozruchowa, pomiar liczby obrotów,
• doświadczalne badanie charakterystyki roboczej maszyny reluktancyjnej: powstawanie momentu obrotowego, charakterystyka rozruchowa, praca
asynchroniczna i synchroniczna, zmiana kierunku obrotów.
1.3 Prostowniki samosterowalne – trenażer z oprogramowaniem:
• karta stanowiska doświadczalnego z prostownikiem samosterowalnym, mikrokontrolerem sterowanym układem z modulacją szerokości impulsu
(PWM), sterowanym programowo multiplekserem do równoczesnego pomiaru napięć i prądów, układem wizualizacji stanów łączeniowych
tranzystorów,
• karta stanowiska doświadczalnego z trójfazowym obciążeniem rezystancyjnym, rezystancyjno-indukcyjnym i układem wizualizacji prądów
obciążenia i wektora pola wirującego.
Treści nauczania:
zasada działania układu modulacji szerokości impulsu (PWM) – wytwarzanie napięcia przemiennego,
charakterystyki obciążenia w trybie pracy jedno- i czterokwadrantowej,
charakterystyki sterowania i charakterystyk roboczych w trybie pracy jedno- i czterokwadrantowej,
pomiary sygnałów przekształtników prądu przemiennego przy modulacji amplitudowej i sygnałowej,
budowa i zasada działania falownika trójfazowego,
14
zasady komutacji blokowej, modulacji sinusoidalnej, super-sinusoidalnej, metoda wektora przestrzennego do wytwarzania trójfazowych napięć
przemiennych,
pomiarowa analiza metod modulacji na podstawie pomiarów przebiegów sygnałów.
2.1. Interfejs pomiarowy z wirtualnymi instrumentami – parametry minimalne:
interfejs USB, szybkość transmisji danych min. 12 Mbit/s,
moduł WLAN/WIFI, 2.4 GHz, IEEE 802.11 b/g/n,
wyjście analogowe, +/- 10 V; 0,2 A; DC — 5 MHz, poprzez gniazda BNC i gniazda 2 mm,
4 analogowe wejścia wzmacniacza różnicowego o szerokości pasma 10 MHz, wytrzymałość napięciowa do 100 V, szybkość próbkowania 100
megasampli, 9 zakresów pomiarowych, pamięć 4 x 8 k x 10 bits, dostęp poprzez gniazda BNC (2 wejścia) i gniazda 2-mm (4 wejścia),
2 wejścia analogowe do pomiaru prądu, zabezpieczenie nadprądowe do 5A, szybkość próbkowania 250 kilosampli, 2 zakresy pomiarowe, rozdzielczość
12 bitów, gniazda 2-mm,
16-bitowe wyjścia sygnałowe, w tym 8-bitowe na gniazdach 2 mm, TTL/CMOS, częstotliwość taktowania 0–100 kHz, wytrzymałość napięciowa +/- 15
V,
16-bitowe wejścia sygnałowe, do tego 8-bitowe na gniazdach 2 mm, pamięć 16-bitowa x 2k, TTL/CMOS, częstotliwość próbkowania 0–100 kHz,
wytrzymałość napięciowa +/- 15 V,
8 przekaźników, 24 V DC/1 A, do tego 4 przekaźniki na gniazdach 2 mm,
zasilacz sieciowy z możliwością zasilania w zakresie: 100-264 V, 47-63 Hz, wyjście 24 V/5 A,
Instrumenty wirtualne (przyrządy pomiarowe i źródła) – parametry minimalne:
2 x woltomierz VI, 2 x amperomierz VI: AC, DC, 9 zakresów od 100 mV do 50 V, TrueRMS,
1 x moduł VI z 8 przekaźnikami, 1 x miernik uniwersalny VI:
1 x 2-kanałowy amperomierz VI: AC, DC, 2 zakresy pomiarowe, 300 mA i 3 A, TrueRMS, AV,
1 x 2-kanałowy woltomierz VI: AC, DC, 9 zakresów pomiarowych, 100 mV to 50 V, TrueRMS, AV,
1 2-/4-kanałowy oscyloskop: szerokość pasma 10 MHz, 25 zakresów czasu, 100 ns/div do 10 s/div, 9 zakresów 20 mV/div do 10 V/div, przerzutnik i
przerzutnik wstępny, tryb XY i XT, funkcje kursora, dodawanie i mnożenie funkcji dla 2 kanałów,
1 x regulowany zasilacz napięcia stałego VI 0–10 V,
1 x generator funkcyjny VI: 0,5 Hz – 5 MHz, 0–10 V, przebieg sinusoidalny, prostokątny i trójkątny,
1 x generator arbitralny VI, 1 x generator impulsów VI,
15
1 x moduł VI z 16 wyjściami cyfrowymi, 1 x moduł VI z 16 wejściami cyfrowymi, 1 x moduł z 16 wejściami/wyjściami cyfrowymi: wskaźnik binarny,
wyświetlacz liczb szesnastkowych, dziesiętnych, ósemkowych,
1 x zasilacz prądu trójfazowego VI 0–150 Hz, 0–14 Vrms, 2 A,
1 x regulowany zasilacz prądu stałego VI 3 x (od -20 V do +20 V), 2 A ,
1 x zasilacz prądu trójfazowego VI z regulowanym przesunięciem fazowym i częstotliwością.
2.2 Stanowisko doświadczalne – minimalne parametry:
moduł sprzęgający do podłączania do interfejsu z kartami ćwiczeń,
przyłącze dla kart stanowiska doświadczalnego,
możliwość zamontowania interfejsu w ramach z szyn o formacie DIN A4,
gniazda 2 mm (min.8 sztuk) udostępniające stałe i zmienne napięcia systemu.
2.3. Akcesoria pomiarowe:
zestaw przewodów pomiarowych o długości 15 – 45 cm zakończonych wtykami bananowymi, boczników pomiarowych i gniazd bananowych.
3.1. Napęd zasilany z z przetwornicy częstotliwości – trenażer z oprogramowaniem:
• karta stanowiska doświadczalnego z układem obwodu pośredniego przetwornicy częstotliwości, z układem wyłącznika prądu zwrotnego dla
kondensatorów obwodu pośredniego i tranzystorem mocy rozładowującym kondensatory poprzez rezystor - Brems-Chopper.
Treści nauczania:
• budowa nowoczesnych przetwornic częstotliwości,
• sposób wytwarzania napięcia obwodu pośredniego,
• charakterystyka napięcie/częstotliwość i układ zasilacza podwyższającego napięcie do korekcji (Boost),
• eksploatacja silników trójfazowych z przetwornicami częstotliwości,
• budowa i zasada działania tranzystorów mocy rozładowujących kondensatory poprzez Brems-Chopper,
• wyznaczenie i analiza prądów, napięć i mocy przetwornicy częstotliwości.
3.2 Napęd z silnikiem krokowym – trenażer z oprogramowaniem:
• karta stanowiska doświadczalnego z 2-fazowym silnikiem krokowym i tarczą przyrostową,
• układ wzbudzenia z 6 wejściami sterującymi i stopniem wzmacniacza mocy, zintegrowanym układem regulacji prądu, z możliwością przełączania na
układ komutacji oporowej,

16
• wskaźnik przeciążenia i statusu.
Treści nauczania:
• budowa i zasada działania silników krokowych: silnik krokowy z magnesem trwałym, silnik krokowy reluktancyjny i silnik krokowy hybrydowy,
• zalety i wady różnych typów silników krokowych,
• zasady wysterowania silników krokowych (unipolarnych i bipolarnych),
• tryby pracy pełno- i półkrokowej,
• doświadczalne wyznaczenie kąta kroku, maksymalnej częstotliwości pracy,
• pomiarowe badanie sygnałów sterujących w trybie pół- i pełno krokowym,
• zapoznanie z różnymi metodami regulacji prądu w silnikach krokowych,
• doświadczalne badanie układu regulacji prądu oraz sygnałów sterujących,
• tworzenie programu do pozycjonowania silnika krokowego.
3.3 Napęd z silnikiem BLCD (serwomotor) – trenażer z oprogramowaniem:
• karta stanowiska doświadczalnego z silnikiem BLDC, układem sterowania liczby obrotów i momentu obrotowego oraz z czujnikami Halla do
wyznaczania liczby obrotów.
Treści nauczania:
• budowa, zasada działania, typowe zastosowania silników BLDC,
• doświadczalne badanie zasad działania, wady zalety silników BLDC,
• modele zasilania silników BLDC: blokowy i sinusoidalny przebieg prądu,
• metody określania położenia wirnika: czujniki Halla, indukcja zwrotna, wykrywanie biegunów, czujnik położenia kątowego (resolver) i czujnik
inkrementalny (przyrostowy),
• pomiarowe badanie położenia za pomocą czujników Halla,
• układy regulacji prądu i liczby obrotów w przypadku silników BLDC,
• doświadczalne badanie układu regulacji liczby obrotów,
• parametryzacja układu regulacji liczby obrotów.
3.4 Napęd z silnikiem liniowym – trenażer z oprogramowaniem:
• karta stanowiska doświadczalnego -bezrdzeniowy, przezroczysty silnik liniowy
• droga przesuwu min. 32 cm,

17
• mikroprocesorowy układ sterowania,
• stopień wzmacniacza mocy o mocy wyjściowej,
• układ wizualizacji wektora wysterowania,
• czujniki Halla do określania położenia.
Treści nauczania:
• zastosowania i zasada działania silnika liniowego,
• konstrukcje silników liniowych,
• zalety i wady silników liniowych w porównaniu z maszynami wirującymi,
• określenie stałych silnika, pozycjonowanie za pomocą silników liniowych,
• metody określania położenia (kodery, czujniki Halla),
• różnice między pozycjonowaniem bezwzględnym i względnym,
• określenie położenia (bezwzględnego i względnego) za pomocą analogowych czujników Halla
4.1 Obiekty regulacji: temperatury, poziomu, pozycji, prędkości, oświetlenia.
• płyta doświadczalna z możliwością regulacji parametrów obiektów w zakresie: temperatury, poziomu, pozycji, prędkości, oświetlenia,
• kontrolery P, I i D z możliwością dowolnego kombinowania i z niezależnie konfigurowanymi parametrami,
• dwu- i trój-pozycyjne kontrolery z regulowaną histerezą przełączania,
• regulowany, analogowy kontroler PID
4.2. Układy regulacji i sterowania: z otwartą i zamkniętą pętlą sterującą, z użyciem kontrolerów impulsowych i ciągłych, pozycji na osi liniowej,
kontrolerów: P, I, D oraz ich kombinacji, analogowego kontrolera PID.
Zakres ćwiczeń i pomiarów:
• sterowanie temperaturą z użyciem kontrolerów impulsowych i ciągłych,
• sterowanie prędkością dla 4-kwadrantowego systemu napędowego,
• sterowanie pozycją na osi liniowej,
• pomiar charakterystyki pętli sterującej w czasie,
• badanie charakterystyki sterowania kontrolerów ciągłych,
• charakterystyki układów sterowania i reakcji na zmiany zmiennych referencyjnych i zakłócających,
• badanie zamkniętych pętli sterujących.
18
Treści nauczania:
• zasady działania układów sterowania z otwartą i zamkniętą pętlą,
• budowa i działanie kontrolerów ciągłych i nieciągłych,
• budowa sterownika oświetlenia w pomieszczeniu,
• charakterystyki sterowania kontrolerów ciągłych,
• ustawienia parametrów i optymalizacja pętli sterujących.