Drgania, dynamika nieliniowa i chaos...
68
Drgania, dynamika nieliniowa i chaos deterministyczny Katarzyna Weron
Transcript of Drgania, dynamika nieliniowa i chaos...
Drgania, dynamika nieliniowa i chaos deterministyczny
Katarzyna Weron
Polecana literatura
Polecam też skrypt:David Morin, Waveshttp://www.people.fas.harvard.edu/~djmorin/waves
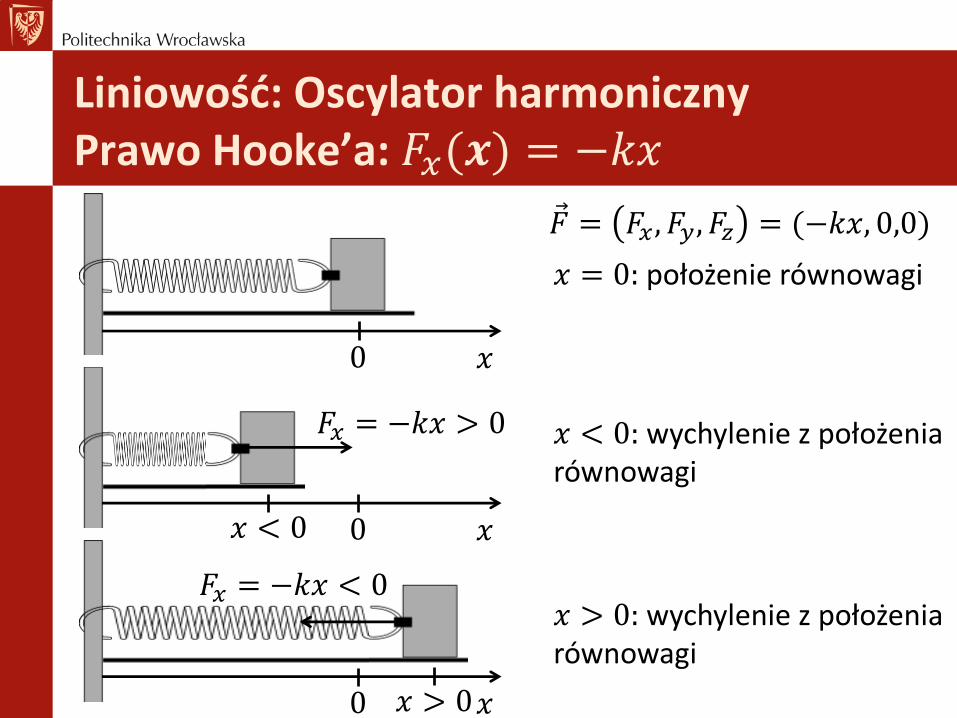
Liniowość: Oscylator harmonicznyPrawo Hooke’a: 𝐹𝑥(𝒙) = −𝑘𝑥
𝑥0
𝑥0𝑥 < 0
𝐹𝑥 = −𝑘𝑥 > 0
𝑥0 𝑥 > 0
𝐹𝑥 = −𝑘𝑥 < 0
𝑥 = 0: położenie równowagi
𝑥 < 0: wychylenie z położenia równowagi
𝑥 > 0: wychylenie z położenia równowagi
Ԧ𝐹 = 𝐹𝑥 , 𝐹𝑦, 𝐹𝑧 = (−𝑘𝑥, 0,0)
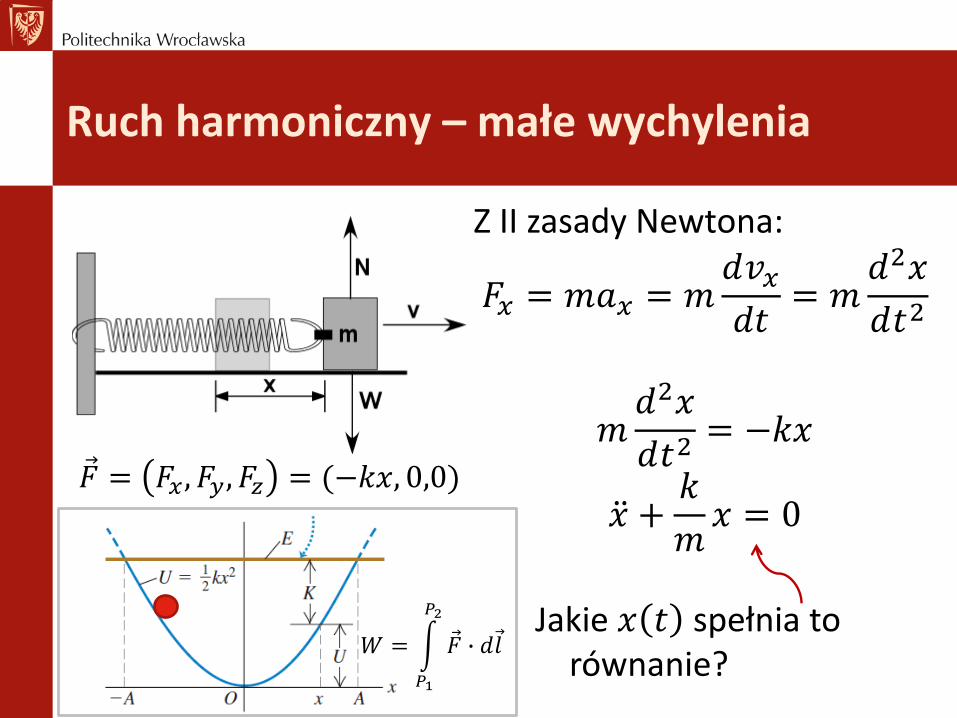
Ruch harmoniczny – małe wychylenia
Z II zasady Newtona:
𝐹𝑥 = 𝑚𝑎𝑥 = 𝑚𝑑𝑣𝑥𝑑𝑡
= 𝑚𝑑2𝑥
𝑑𝑡2
𝑚𝑑2𝑥
𝑑𝑡2= −𝑘𝑥
ሷ𝑥 +𝑘
𝑚𝑥 = 0
Jakie 𝑥 𝑡 spełnia to równanie?
𝑊 = න
𝑃1
𝑃2
Ԧ𝐹 ∙ 𝑑Ԧ𝑙
Ԧ𝐹 = 𝐹𝑥 , 𝐹𝑦, 𝐹𝑧 = (−𝑘𝑥, 0,0)
Ruch harmoniczny – rozwiązanie
ሷ𝑥 +𝑘
𝑚𝑥 = 0 (∗)
Spróbujmy: 𝑥 𝑡 = 𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙ሶ𝑥 = −𝐴𝜔 sin 𝜔𝑡 + 𝜙 , ሷ𝑥 = −𝐴𝜔2𝑐𝑜𝑠 𝜔𝑡 + 𝜙
Wstawiamy do ∗ :
−𝐴𝜔2𝑐𝑜𝑠 𝜔𝑡 + 𝜙 +𝑘
𝑚𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙 = 0
−𝜔2 +𝑘
𝑚𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙 = 0
Ruch harmoniczny – rozwiązanie
ሷ𝑥 +𝑘
𝑚𝑥 = 0
Spróbujmy: 𝑥 𝑡 = 𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙
−𝜔2 +𝑘
𝑚𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙 = 0
Spełnione dla każdego 𝑡 jeśli:
𝜔2 =𝑘
𝑚→ 𝜔 =
𝑘
𝑚
Częstość kątowa
ሷ𝑥 +𝑘
𝑚𝑥 = 0, 𝑥 𝑡 = 𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙
𝑥 𝑡 +2𝜋
𝜔= 𝐴𝑐𝑜𝑠 𝜔 𝑡 +
2𝜋
𝜔+ 𝜙
= 𝐴𝑐𝑜𝑠 𝜔𝑡 + 2𝜋 + 𝜙 = 𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙 = 𝑥(𝑡)
𝑇 =2𝜋
𝜔okres
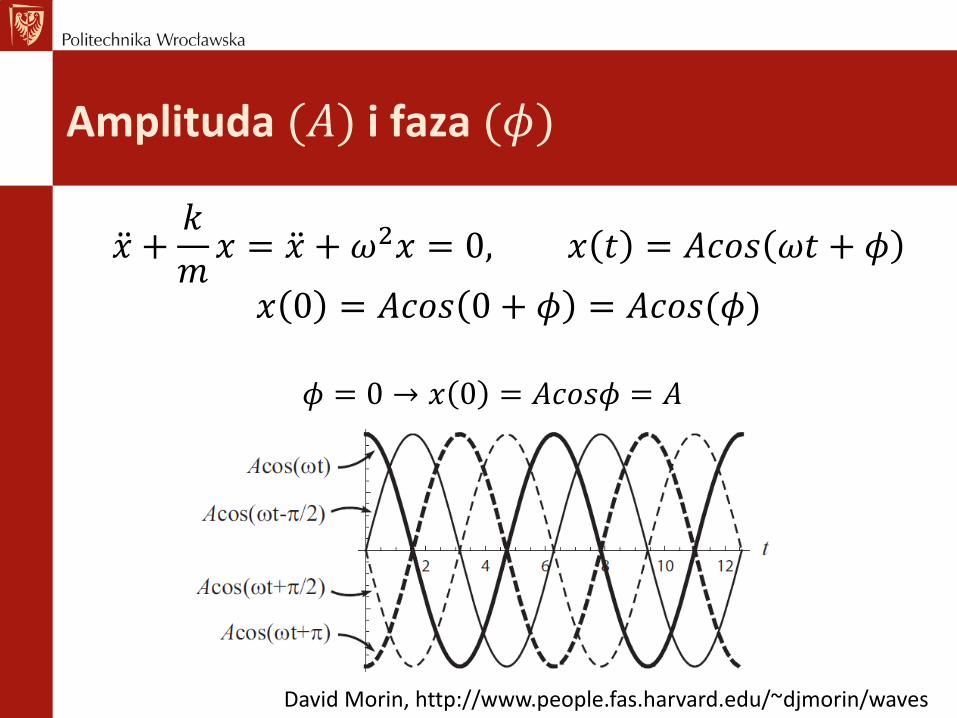
Amplituda (𝐴) i faza (𝜙)
ሷ𝑥 +𝑘
𝑚𝑥 = ሷ𝑥 + 𝜔2𝑥 = 0, 𝑥 𝑡 = 𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙
𝑥 0 = 𝐴𝑐𝑜𝑠 0 + 𝜙 = 𝐴𝑐𝑜𝑠(𝜙)
𝜙 = 0 → 𝑥 0 = 𝐴𝑐𝑜𝑠𝜙 = 𝐴
David Morin, http://www.people.fas.harvard.edu/~djmorin/waves
Inne formy rozwiązań
ሷ𝑥 +𝑘
𝑚𝑥 = ሷ𝑥 + 𝜔2𝑥 = 0,
𝑥 𝑡 = 𝐴𝑐𝑜𝑠 𝜔𝑡 + 𝜙= 𝐴𝑠𝑖𝑛 𝜔𝑡 + 𝜙′= 𝐵𝑐𝑐𝑜𝑠 𝜔𝑡 + 𝐵𝑠𝑠𝑖𝑛 𝜔𝑡
= 𝐶𝑒𝑖𝜔𝑡 + 𝐶∗𝑒−𝑖𝜔𝑡
𝐵𝑐= 𝐴𝑐𝑜𝑠𝜙, 𝐵𝑠 = −𝐴𝑠𝑖𝑛𝜙
Wiesz skąd te inne formy?
Wzór Eulera i rozwiązanie ogólne
𝑒𝑖𝜙 = 𝑐𝑜𝑠𝜙 + 𝑖𝑠𝑖𝑛𝜙 wzór Eulera𝑒−𝑖𝜙 = 𝑐𝑜𝑠𝜙 − 𝑖𝑠𝑖𝑛𝜙Stąd:
2𝑐𝑜𝑠𝜙 = 𝑒𝑖𝜙 + 𝑒−𝑖𝜙, 2𝑖𝑠𝑖𝑛𝜙 = 𝑒𝑖𝜙 − 𝑒−𝑖𝜙
Szukamy zwykle ogólnego rozwiązania w postaci:𝑥 𝑡 = 𝐶𝑒𝑟𝑡 , ሶ𝑥 = 𝐶𝑟𝑒𝑟𝑡 , ሷ𝑥 = 𝐶𝑟2𝑒𝑟𝑡
ሷ𝒙 +𝒌
𝒎𝒙 = 𝟎
𝐶𝑟2𝑒𝑟𝑡 +𝑘
𝑚𝐶𝑒𝑟𝑡 = 0 → 𝑟2 +
𝑘
𝑚= 0 → 𝑟 = ±𝑖𝜔
równanie charakterystyczne
Rozwiązanie ogólne
Szukamy zwykle ogólnego rozwiązania w postaci:𝑥 𝑡 = 𝐶𝑒𝑟𝑡
Otrzymaliśmy: 𝑟 = ±𝑖𝜔
Mamy dwa rozwiązania:𝑥1 𝑡 = 𝐶1𝑒
𝑖𝜔𝑡 , 𝑥2 𝑡 = 𝐶2𝑒−𝑖𝜔𝑡
Zasada superpozycji w układach liniowych:
𝑥 𝑡 = 𝑥1 𝑡 + 𝑥2 𝑡 = 𝐶1𝑒𝑖𝜔𝑡 + 𝐶2𝑒
−𝑖𝜔𝑡
Rozwiązanie musi być rzeczywiste
𝑥 𝑡 = 𝑥1 𝑡 + 𝑥2 𝑡 = 𝐶1𝑒𝑖𝜔𝑡 + 𝐶2𝑒
−𝑖𝜔𝑡
Żeby 𝑥 𝑡 było rzeczywiste to 𝐶1 = 𝐶2∗
Czyli: 𝐶1 = 𝐶 = 𝐶0𝑒𝑖𝜙, 𝐶2 = 𝐶∗ = 𝐶0𝑒
−𝑖𝜙
𝑥 𝑡 = 𝐶0𝑒𝑖𝜙𝐶0𝑒
𝑖𝜔𝑡 + 𝐶0𝑒−𝑖𝜙𝐶0𝑒
−𝑖𝜔𝑡
= 2𝐶0cos(𝜔𝑡 + 𝜙)
Czyli faktycznie tożsame formy
W równaniach liniowych obowiązuje zasada superpozycji
• 𝑥1 𝑡 i 𝑥2 𝑡 - rozwiązania liniowego równania różniczkowego
• Rozwiązaniem jest też dowolna kombinacja liniowa 𝑥 𝑡 = 𝐶1𝑥1 𝑡 + 𝐶2𝑥2(𝑡)
• Liniowe jednorodnego równania różniczkowego rzędu 𝑛: 𝑛 liniowo niezależnych rozwiązań.
• Każda kombinacja liniowa tych 𝑛 rozwiązań jest rozwiązaniem.
• Liniowa niezależność funkcji: żadna z tych funkcji nie jest równa kombinacji liniowej pozostałych.
UNIVERSITY PHYSICS, Copyright ©2012 Pearson Education, Inc., publishing as Addison-Wesley
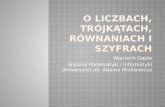
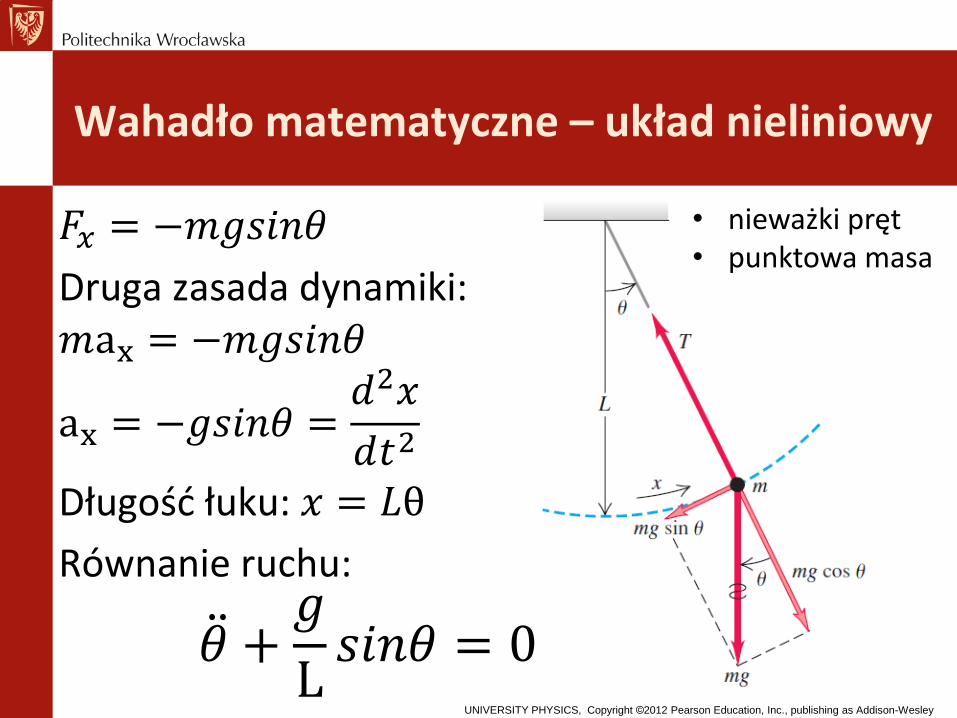
Wahadło matematyczne – układ nieliniowy
𝐹𝑥 = −𝑚𝑔𝑠𝑖𝑛𝜃
Druga zasada dynamiki:𝑚ax = −𝑚𝑔𝑠𝑖𝑛𝜃
ax = −𝑔𝑠𝑖𝑛𝜃 =𝑑2𝑥
𝑑𝑡2
Długość łuku: 𝑥 = 𝐿θ
Równanie ruchu:
ሷ𝜃 +𝑔
L𝑠𝑖𝑛𝜃 = 0
• nieważki pręt• punktowa masa
Jak to rozwiązać?
ሷ𝜃 +𝑔
L𝑠𝑖𝑛𝜃 = 0
𝑠𝑖𝑛𝜃 = 𝜃 −𝜃3
3!+
𝜃5
5!−⋯
Jeśli założysz, że 𝜃 → 0, wtedy 𝑠𝑖𝑛𝜃 = 𝜃
ሷ𝜃 +𝑔
L𝜃 = 0
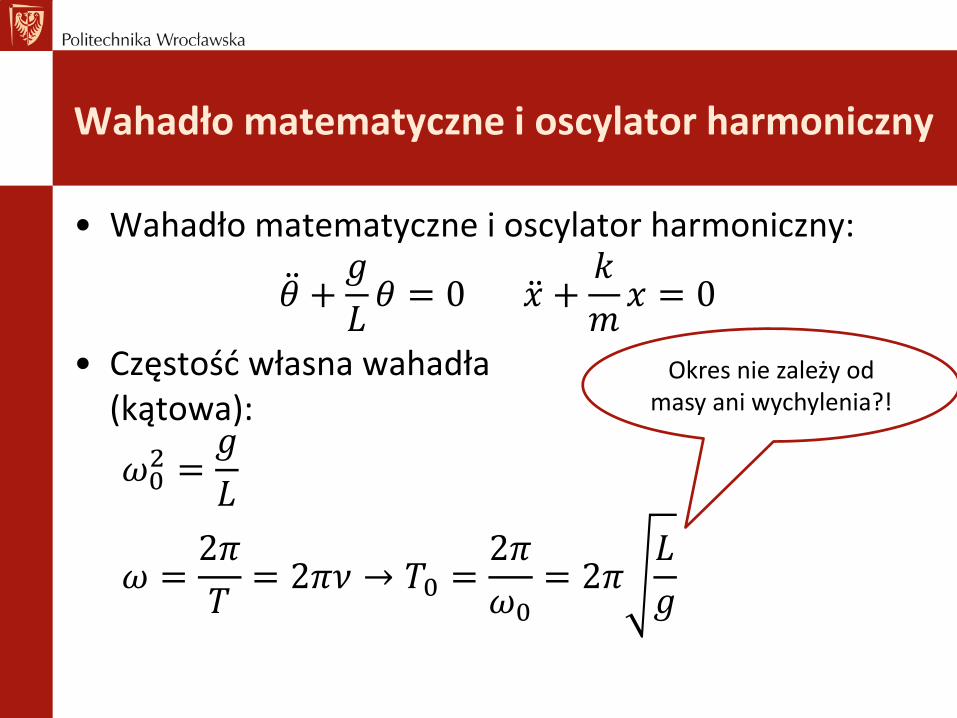
Wahadło matematyczne i oscylator harmoniczny
• Wahadło matematyczne i oscylator harmoniczny:
ሷ𝜃 +𝑔
𝐿𝜃 = 0 ሷ𝑥 +
𝑘
𝑚𝑥 = 0
• Częstość własna wahadła(kątowa):
𝜔02 =
𝑔
𝐿
𝜔 =2𝜋
𝑇= 2𝜋𝜈 → 𝑇0 =
2𝜋
𝜔0= 2𝜋
𝐿
𝑔
Okres nie zależy od masy ani wychylenia?!
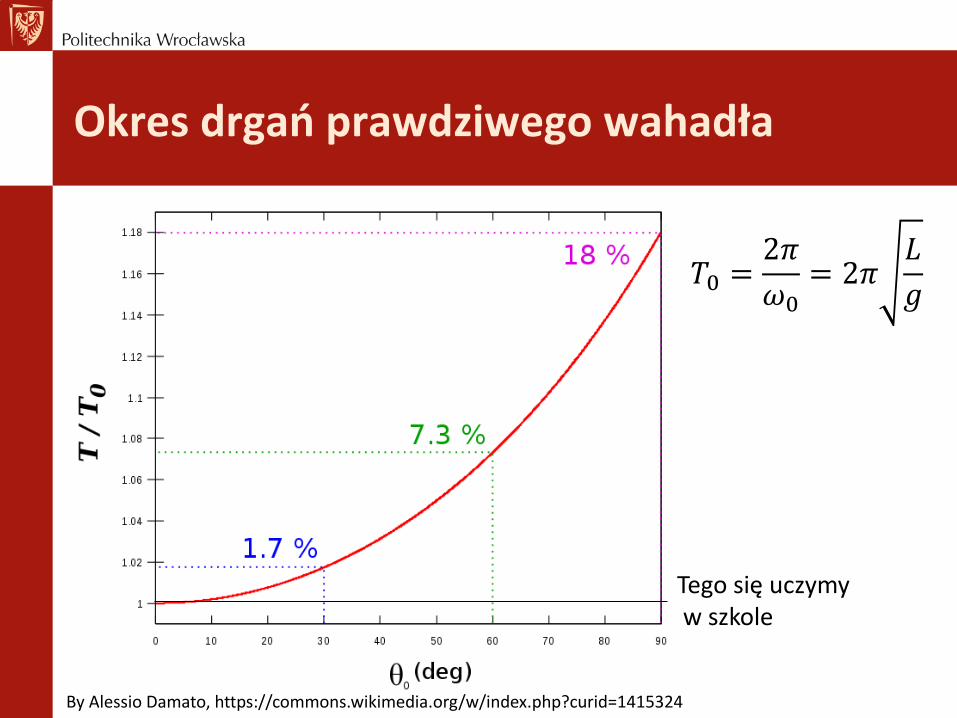
Okres drgań prawdziwego wahadła
𝑇0 =2𝜋
𝜔0= 2𝜋
𝐿
𝑔
By Alessio Damato, https://commons.wikimedia.org/w/index.php?curid=1415324
Tego się uczymyw szkole
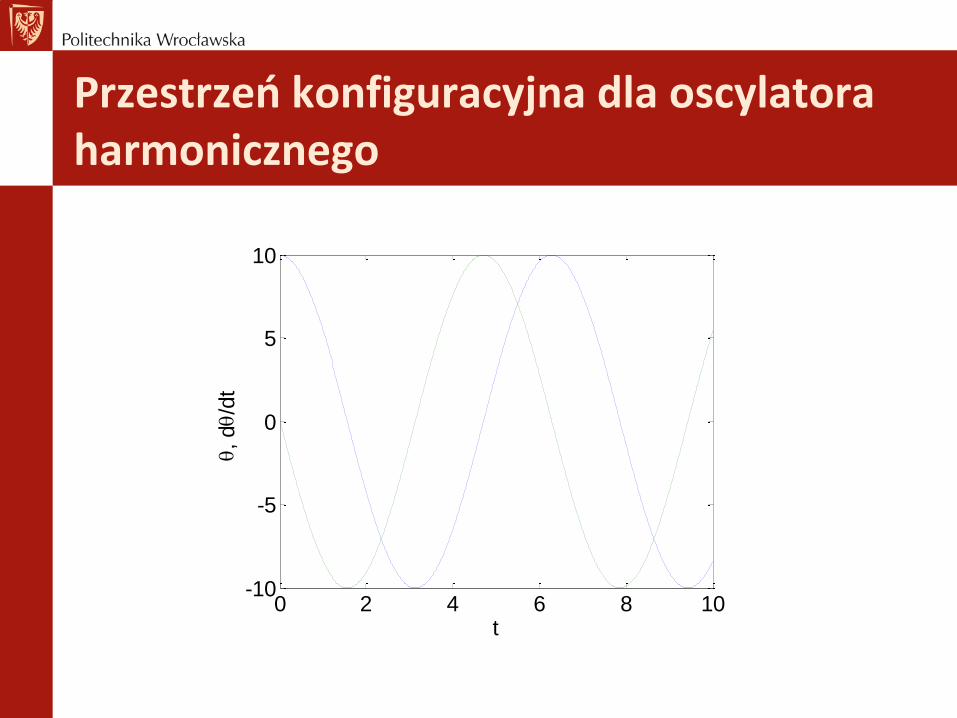
Przestrzeń konfiguracyjna dla oscylatora harmonicznego
0 2 4 6 8 10-10
-5
0
5
10
t
, d/d
t
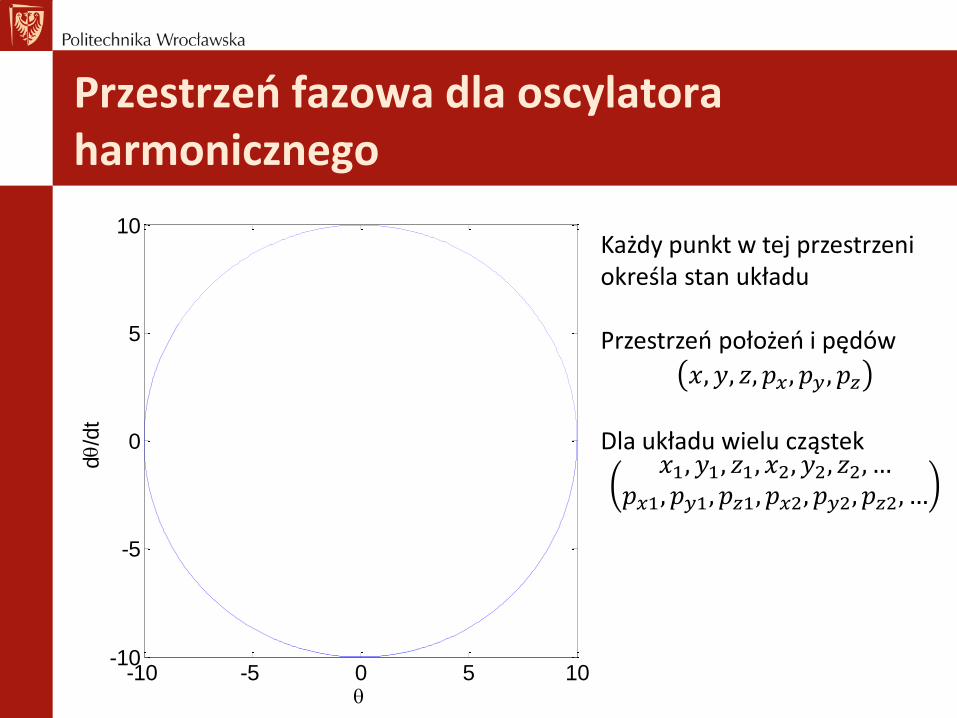
Przestrzeń fazowa dla oscylatora harmonicznego
-10 -5 0 5 10-10
-5
0
5
10
d/d
t
Każdy punkt w tej przestrzeniokreśla stan układu
Przestrzeń położeń i pędów
𝑥, 𝑦, 𝑧, 𝑝𝑥, 𝑝𝑦 , 𝑝𝑧
Dla układu wielu cząstek𝑥1, 𝑦1, 𝑧1, 𝑥2, 𝑦2, 𝑧2, …
𝑝𝑥1, 𝑝𝑦1, 𝑝𝑧1, 𝑝𝑥2, 𝑝𝑦2, 𝑝𝑧2, …
A jeśli interesują nas duże kąty?
ሷ𝜃 +𝑔
L𝑠𝑖𝑛𝜃 = 0
• Jak to rozwiązać?
• A co jeśli jakieś dodatkowe siły?
– Tłumienie
– Wymuszanie cykliczne
• Wahadło może zadziwić!

Oscylator tłumiony i wymuszany
𝑚 ሷ𝑥 + 𝑘𝑥 = 0 oscylator harmoniczny (liniowe jednorodne)
𝑚 ሷ𝑥 + 𝑏 ሶ𝑥 + 𝑘𝑥 = 0 tłumienie (liniowe jednorodne)
𝑚 ሷ𝑥 + 𝑏 ሶ𝑥 + 𝑘𝑥 = 𝐹(𝑡) wymuszanie (liniowe niejednorodne)
ሷ𝑥 +𝑏
𝑚ሶ𝑥 +
𝑘
𝑚𝑥 =
𝐹 𝑡
𝑚= 𝑓 𝑡 = 𝑓0sin(𝜔𝑡)
• Liniowe równania różniczkowe dla położenia klocka 𝑥
• Brak niespodzianek
• Liniowe jednorodne – bardzo łatwe do rozwiązania
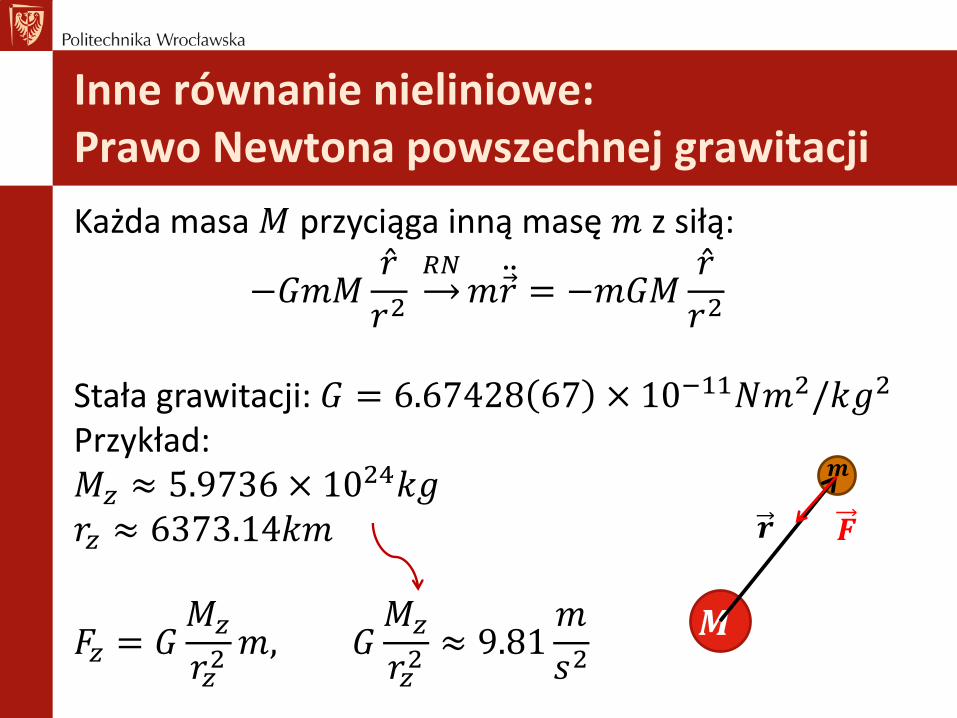
Inne równanie nieliniowe: Prawo Newtona powszechnej grawitacji
Każda masa 𝑀 przyciąga inną masę 𝑚 z siłą:
−𝐺𝑚𝑀Ƹ𝑟
𝑟2𝑅𝑁
𝑚 ሷԦ𝑟 = −𝑚𝐺𝑀Ƹ𝑟
𝑟2
Stała grawitacji: 𝐺 = 6.67428 67 × 10−11𝑁𝑚2/𝑘𝑔2
Przykład:𝑀𝑧 ≈ 5.9736 × 1024𝑘𝑔𝑟𝑧 ≈ 6373.14𝑘𝑚
𝐹𝑧 = 𝐺𝑀𝑧
𝑟𝑧2𝑚, 𝐺
𝑀𝑧
𝑟𝑧2≈ 9.81
𝑚
𝑠2𝑴
𝑭𝒓
𝒎
Czy układ słoneczny jest stabilny?
• 1887 król Szwecji Oscar II: nagroda
• H. Poincare (1854-1912), francuski matematyk
• Za co?
(c) Wikipedia
Co zrobił Poincare?
• “Problem 3 ciał i równaniadynamiki”, 1890 (270 stron)
• Zaskakująco skomplikowane zachowanie
• Problem stabilności układu słonecznego nie jest rozwiązany do dziś
• Podwaliny teorii chaosu
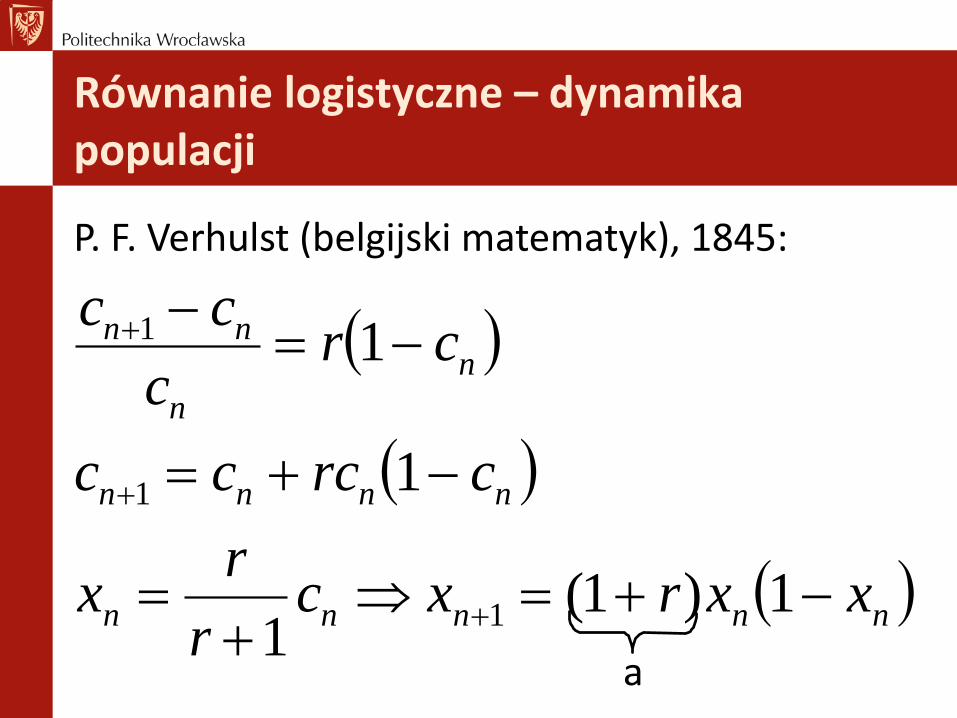
Równanie logistyczne – dynamika populacji
nnnnn
nnnn
n
n
nn
xxrxcr
rx
crccc
crc
cc
1)1(1
1
1
1
1
1
a
P. F. Verhulst (belgijski matematyk), 1845:
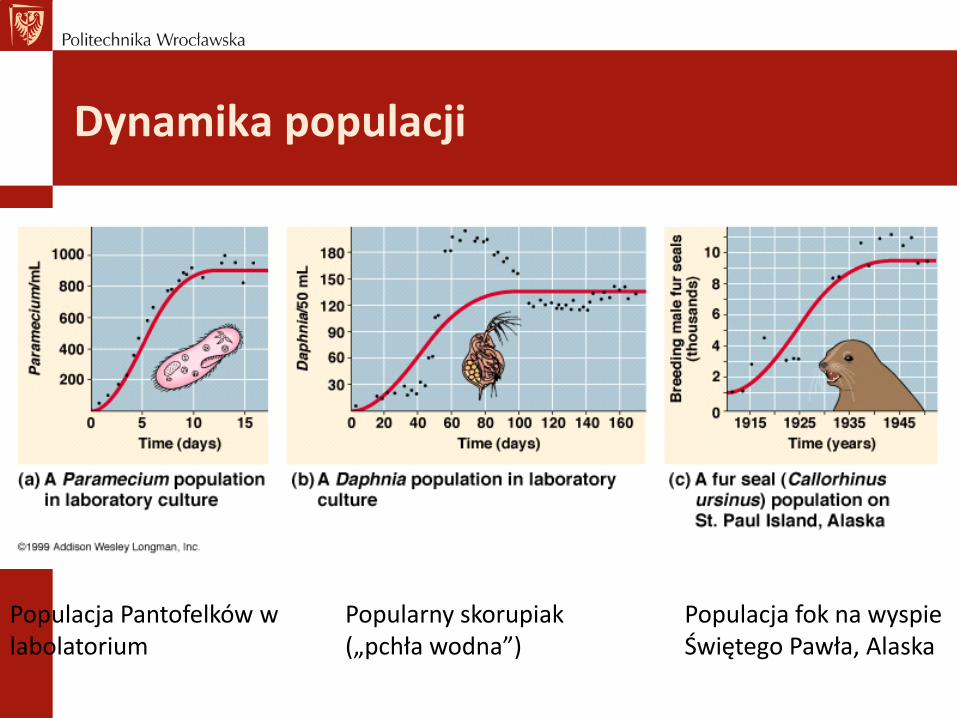
Dynamika populacji
Populacja fok na wyspieŚwiętego Pawła, Alaska
Populacja Pantofelków w labolatorium
Popularny skorupiak („pchła wodna”)
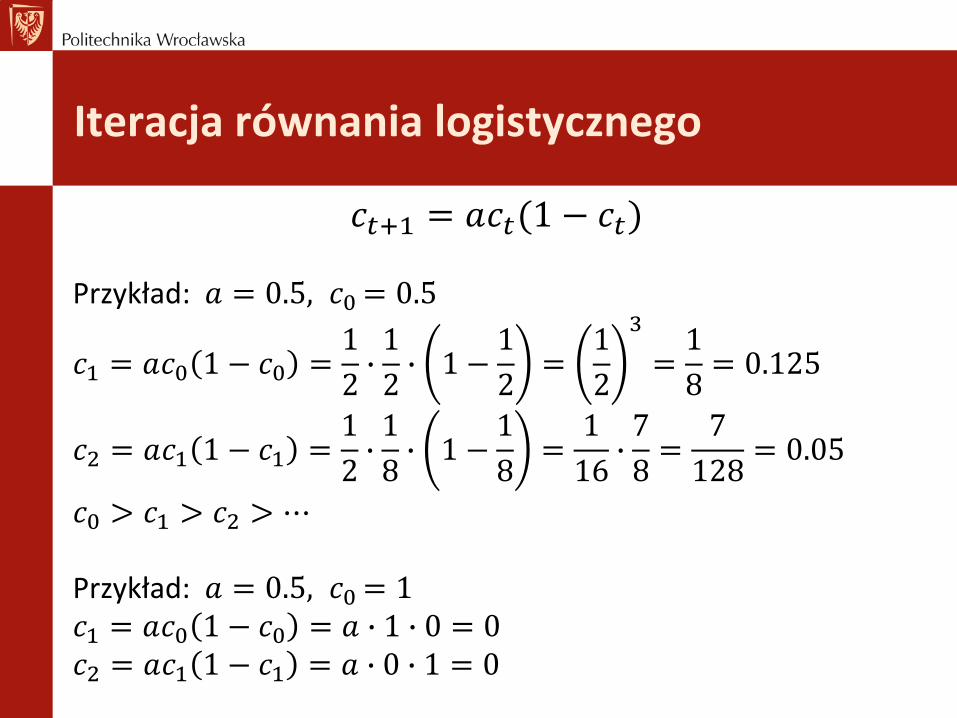
Iteracja równania logistycznego
𝑐𝑡+1 = 𝑎𝑐𝑡(1 − 𝑐𝑡)
Przykład: 𝑎 = 0.5, 𝑐0= 0.5
𝑐1 = 𝑎𝑐0 1 − 𝑐0 =1
2∙1
2∙ 1 −
1
2=
1
2
3
=1
8= 0.125
𝑐2 = 𝑎𝑐1 1 − 𝑐1 =1
2∙1
8∙ 1 −
1
8=
1
16∙7
8=
7
128= 0.05
𝑐0 > 𝑐1 > 𝑐2 > ⋯
Przykład: 𝑎 = 0.5, 𝑐0= 1𝑐1 = 𝑎𝑐0 1 − 𝑐0 = 𝑎 ∙ 1 ∙ 0 = 0𝑐2 = 𝑎𝑐1 1 − 𝑐1 = 𝑎 ∙ 0 ∙ 1 = 0
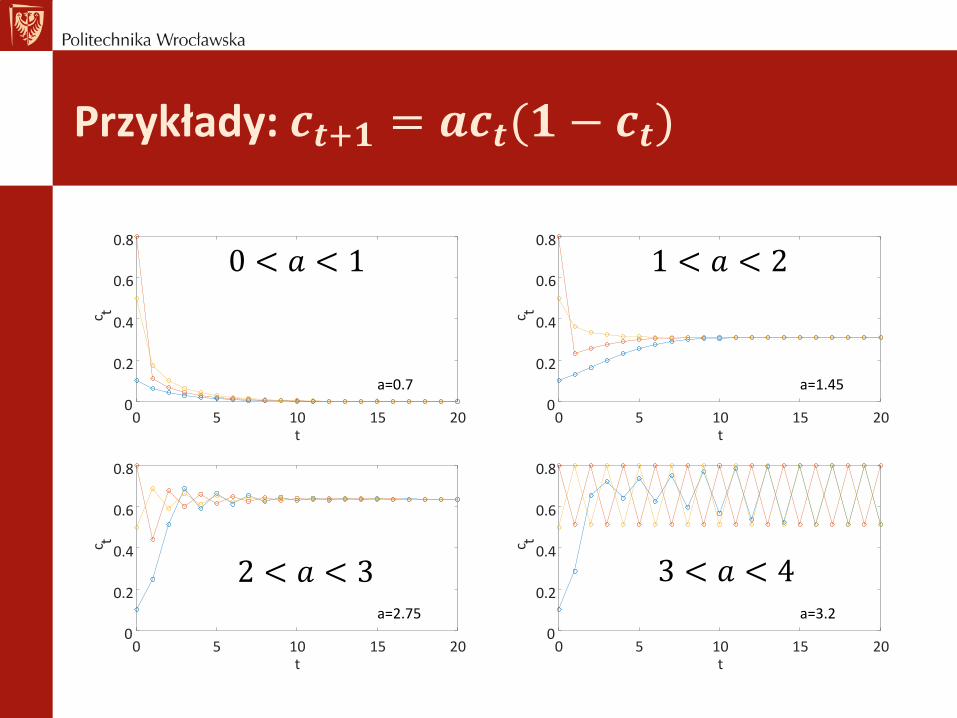
Przykłady: 𝒄𝒕+𝟏 = 𝒂𝒄𝒕(𝟏 − 𝒄𝒕)
0 < 𝑎 < 1
0 5 10 15 20t
0
0.2
0.4
0.6
0.8
c t
a=0.7
1 < 𝑎 < 2
0 5 10 15 20t
0
0.2
0.4
0.6
0.8
c t
a=1.45
0 5 10 15 20t
0
0.2
0.4
0.6
0.8
c t
a=2.75
0 5 10 15 20t
0
0.2
0.4
0.6
0.8
c t
a=3.2
2 < 𝑎 < 3 3 < 𝑎 < 4
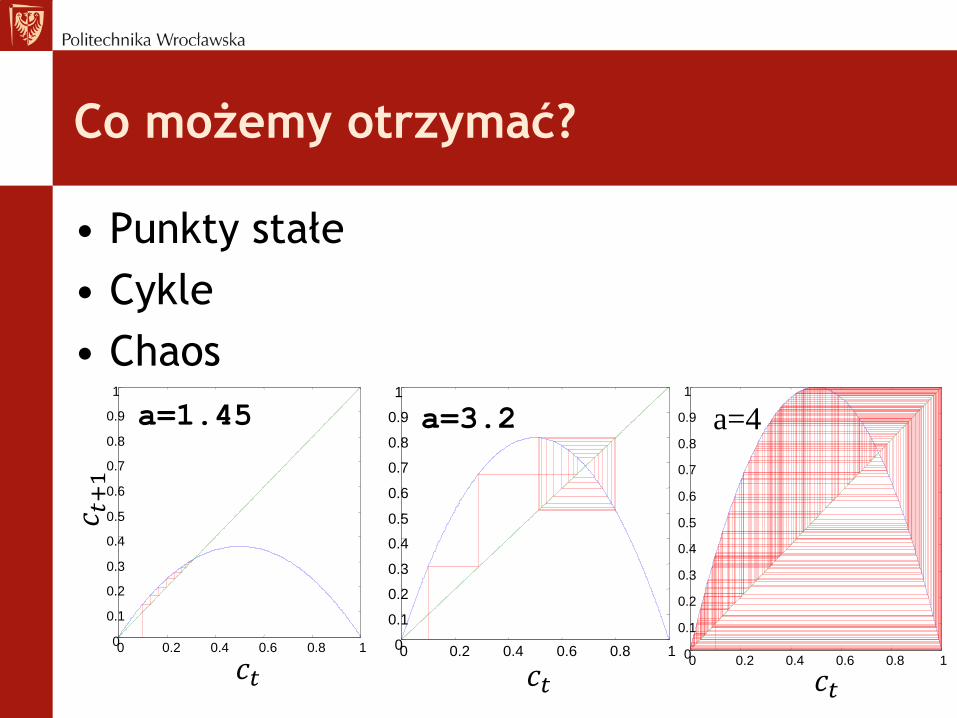
Co możemy otrzymać?
• Punkty stałe
• Cykle
• Chaos
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
𝑐𝑡
a=1.45
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
a=3.2
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
a=4
𝑐 𝑡+1
𝑐𝑡 𝑐𝑡
Punkty stałe
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
a=2.75
𝑐 𝑡+1
𝑐𝑡
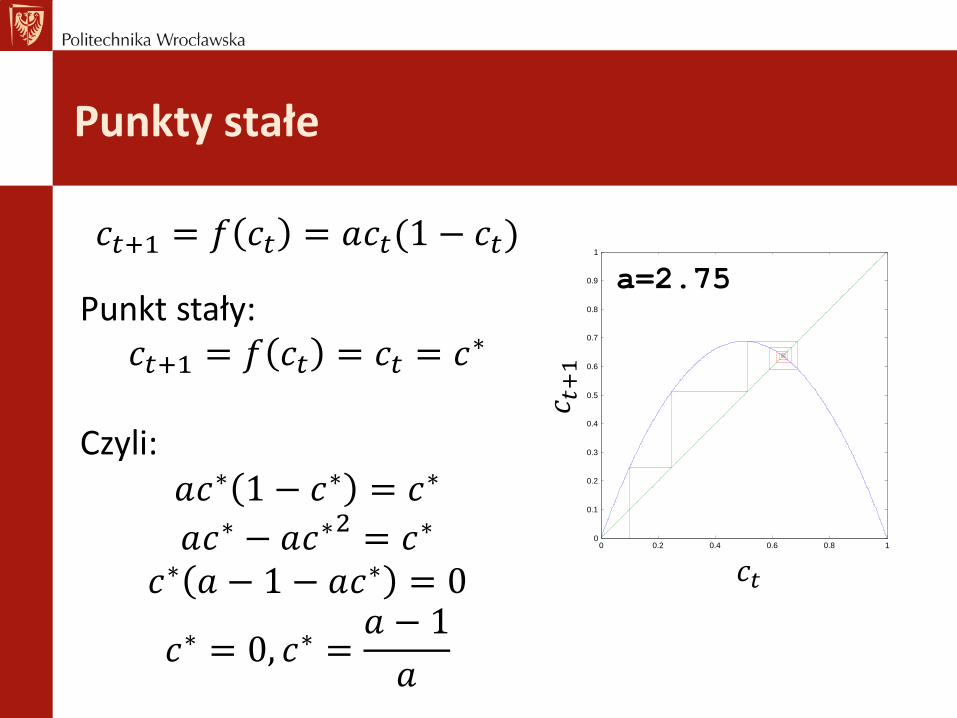
𝑐𝑡+1 = 𝑓 𝑐𝑡 = 𝑎𝑐𝑡(1 − 𝑐𝑡)
Punkt stały:𝑐𝑡+1 = 𝑓 𝑐𝑡 = 𝑐𝑡 = 𝑐∗
Czyli:𝑎𝑐∗ 1 − 𝑐∗ = 𝑐∗
𝑎𝑐∗ − 𝑎𝑐∗2 = 𝑐∗
𝑐∗ 𝑎 − 1 − 𝑎𝑐∗ = 0
𝑐∗ = 0, 𝑐∗ =𝑎 − 1
𝑎
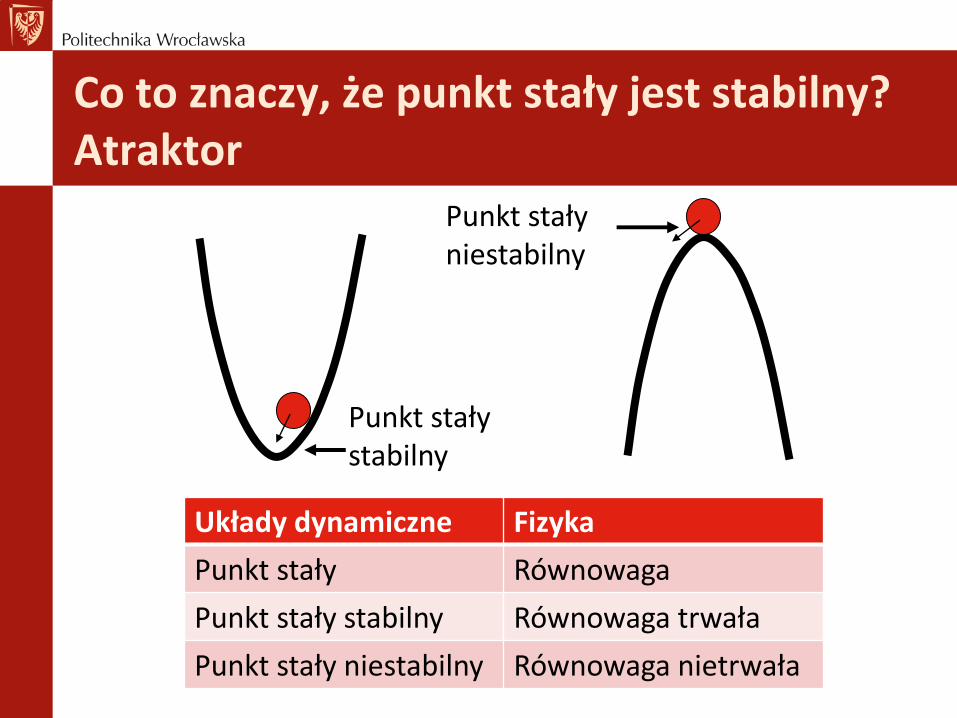
Co to znaczy, że punkt stały jest stabilny? Atraktor
Punkt stałystabilny
Punkt stałyniestabilny
Układy dynamiczne Fizyka
Punkt stały Równowaga
Punkt stały stabilny Równowaga trwała
Punkt stały niestabilny Równowaga nietrwała
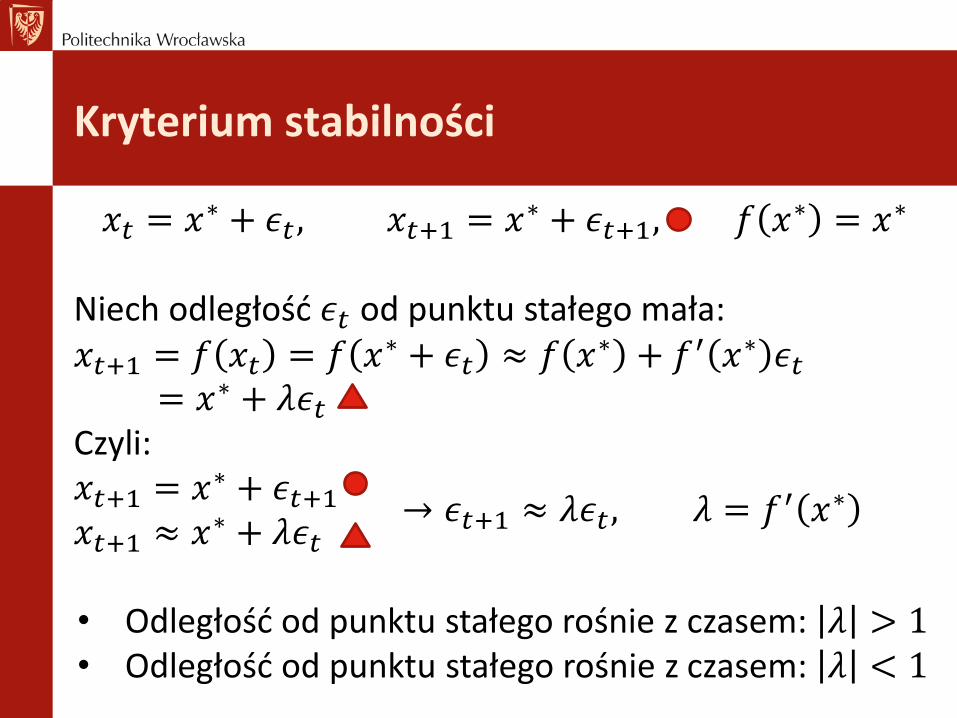
Kryterium stabilności
𝑥𝑡 = 𝑥∗ + 𝜖𝑡 , 𝑥𝑡+1 = 𝑥∗ + 𝜖𝑡+1, 𝑓 𝑥∗ = 𝑥∗
Niech odległość 𝜖𝑡 od punktu stałego mała:𝑥𝑡+1 = 𝑓 𝑥𝑡 = 𝑓 𝑥∗ + 𝜖𝑡 ≈ 𝑓 𝑥∗ + 𝑓′ 𝑥∗ 𝜖𝑡
= 𝑥∗ + 𝜆𝜖𝑡Czyli:𝑥𝑡+1 = 𝑥∗ + 𝜖𝑡+1𝑥𝑡+1 ≈ 𝑥∗ + 𝜆𝜖𝑡
→ 𝜖𝑡+1 ≈ 𝜆𝜖𝑡 , 𝜆 = 𝑓′ 𝑥∗
• Odległość od punktu stałego rośnie z czasem: 𝜆 > 1• Odległość od punktu stałego rośnie z czasem: 𝜆 < 1
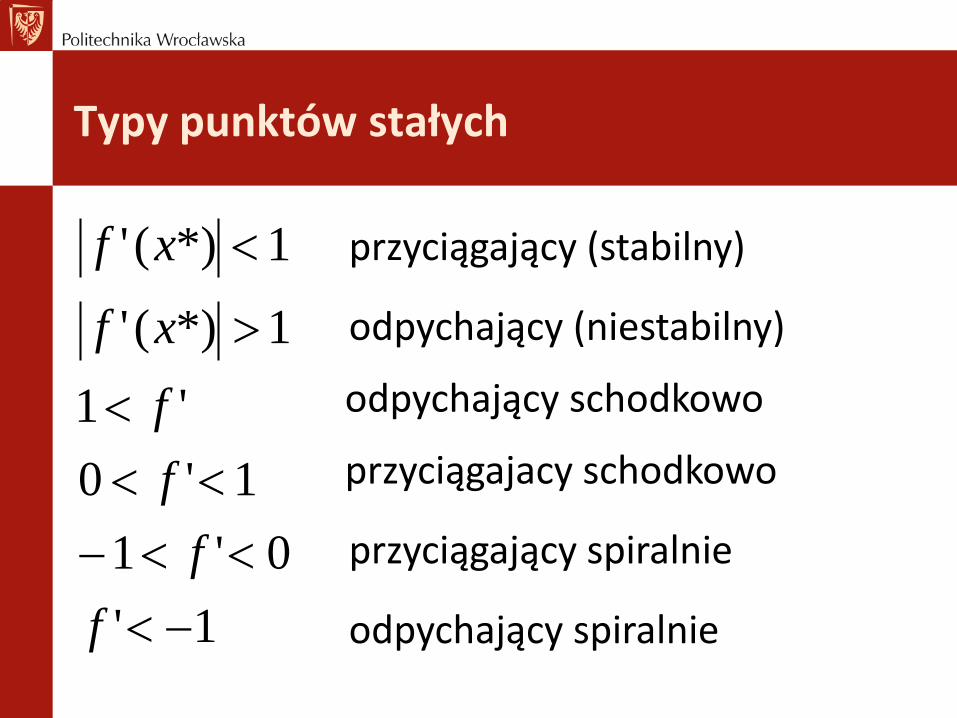
Typy punktów stałych
1'
0'1
1'0
'1
1*)('
1*)('
f
f
f
f
xf
xf przyciągający (stabilny)
odpychający (niestabilny)
odpychający schodkowo
przyciągajacy schodkowo
przyciągający spiralnie
odpychający spiralnie
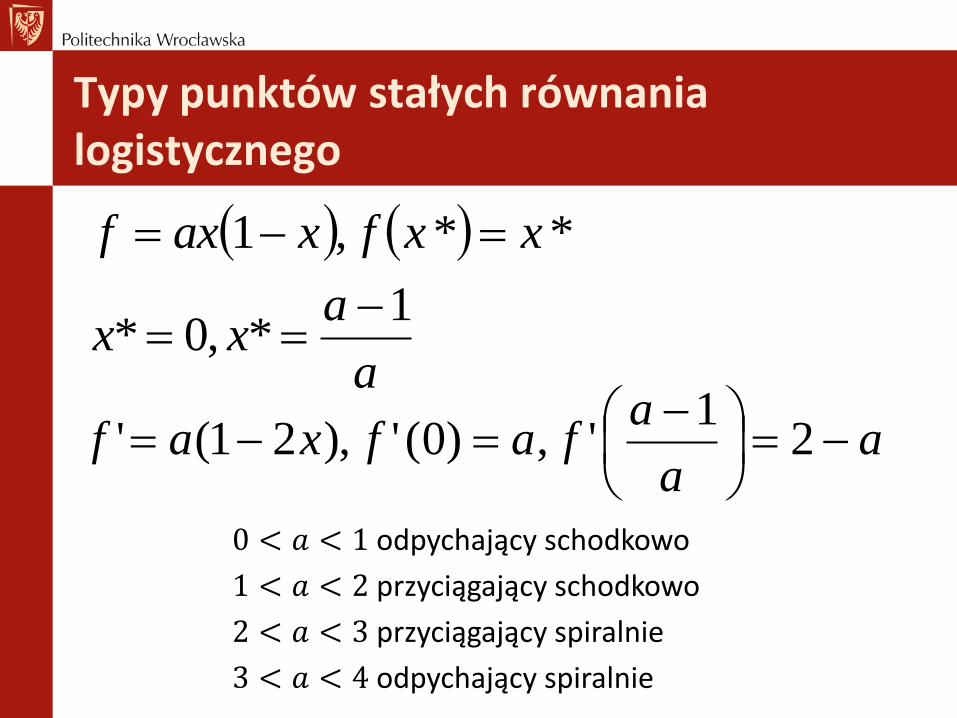
Typy punktów stałych równanialogistycznego
aa
afafxaf
2
1',)0('),21('
a
axx
xxfxaxf
1*,0*
**,1
0 < 𝑎 < 1 odpychający schodkowo
1 < 𝑎 < 2 przyciągający schodkowo
2 < 𝑎 < 3 przyciągający spiralnie
3 < 𝑎 < 4 odpychający spiralnie
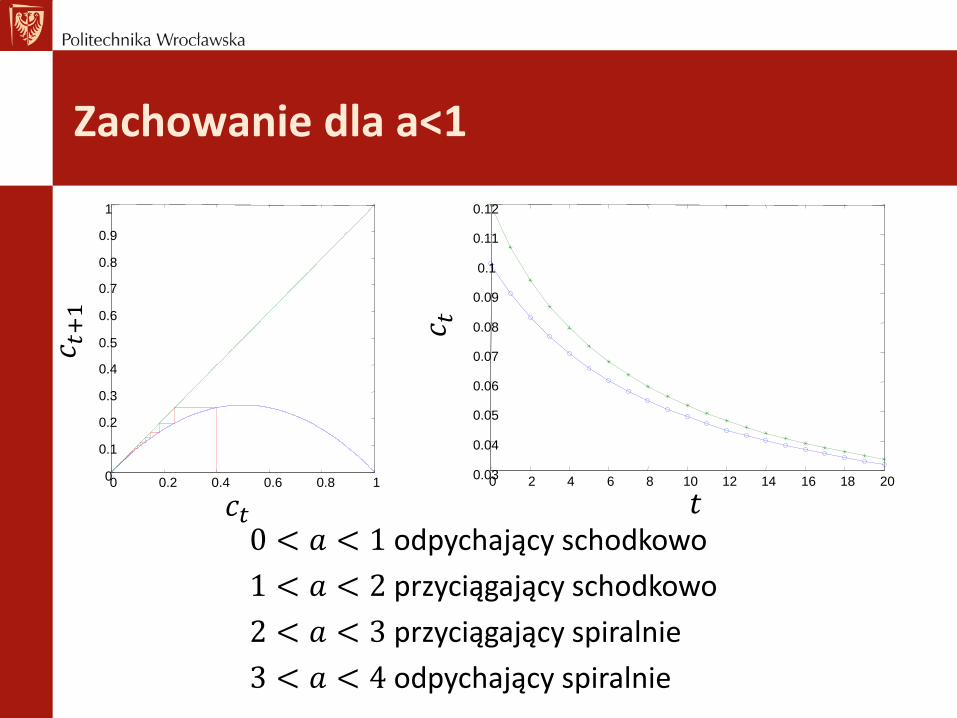
Zachowanie dla a<1
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 200.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
0.12
𝑡
𝑐 𝑡
𝑐 𝑡+1
𝑐𝑡0 < 𝑎 < 1 odpychający schodkowo
1 < 𝑎 < 2 przyciągający schodkowo
2 < 𝑎 < 3 przyciągający spiralnie
3 < 𝑎 < 4 odpychający spiralnie
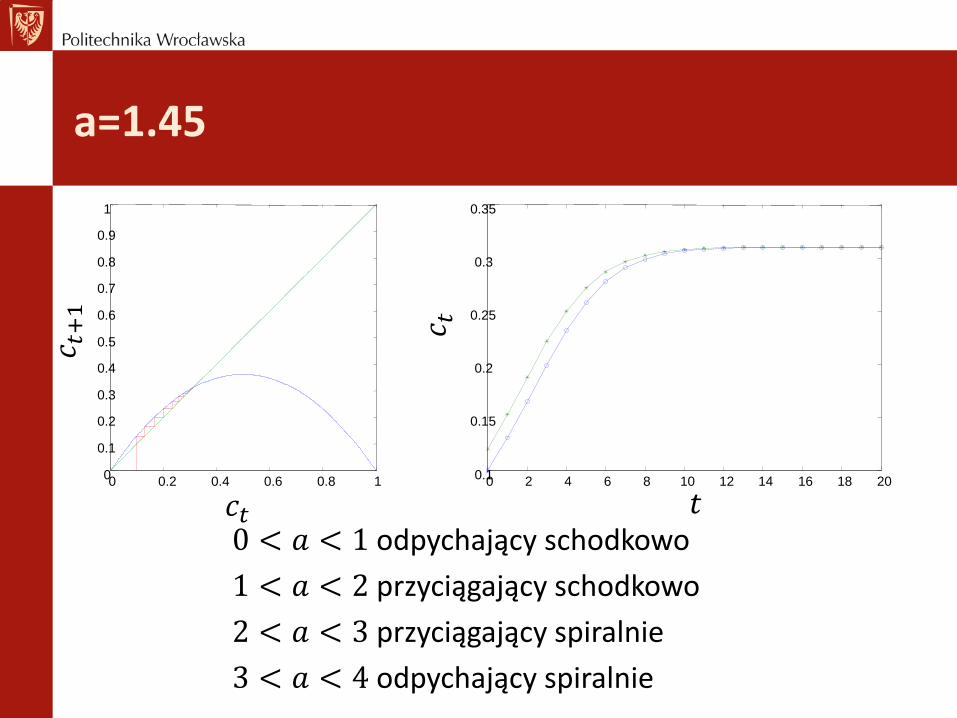
a=1.45
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 200.1
0.15
0.2
0.25
0.3
0.35
𝑡
𝑐 𝑡
𝑐 𝑡+1
𝑐𝑡0 < 𝑎 < 1 odpychający schodkowo
1 < 𝑎 < 2 przyciągający schodkowo
2 < 𝑎 < 3 przyciągający spiralnie
3 < 𝑎 < 4 odpychający spiralnie
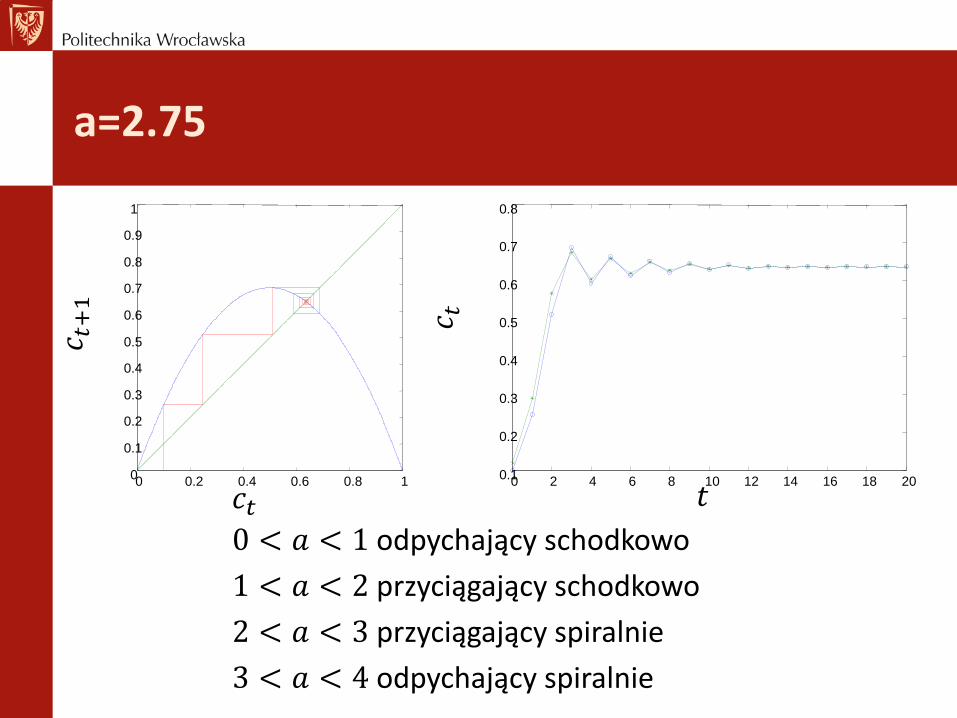
a=2.75
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 200.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
𝑡
𝑐 𝑡
𝑐 𝑡+1
𝑐𝑡0 < 𝑎 < 1 odpychający schodkowo
1 < 𝑎 < 2 przyciągający schodkowo
2 < 𝑎 < 3 przyciągający spiralnie
3 < 𝑎 < 4 odpychający spiralnie
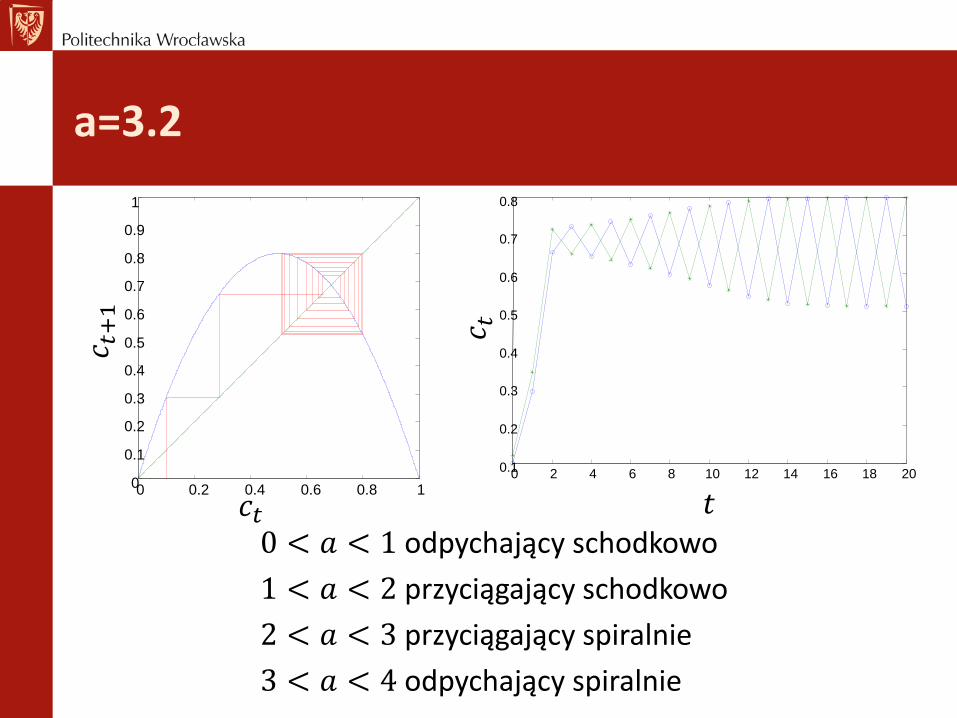
a=3.2
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 200.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
𝑡𝑐 𝑡
𝑐 𝑡+1
𝑐𝑡0 < 𝑎 < 1 odpychający schodkowo
1 < 𝑎 < 2 przyciągający schodkowo
2 < 𝑎 < 3 przyciągający spiralnie
3 < 𝑎 < 4 odpychający spiralnie
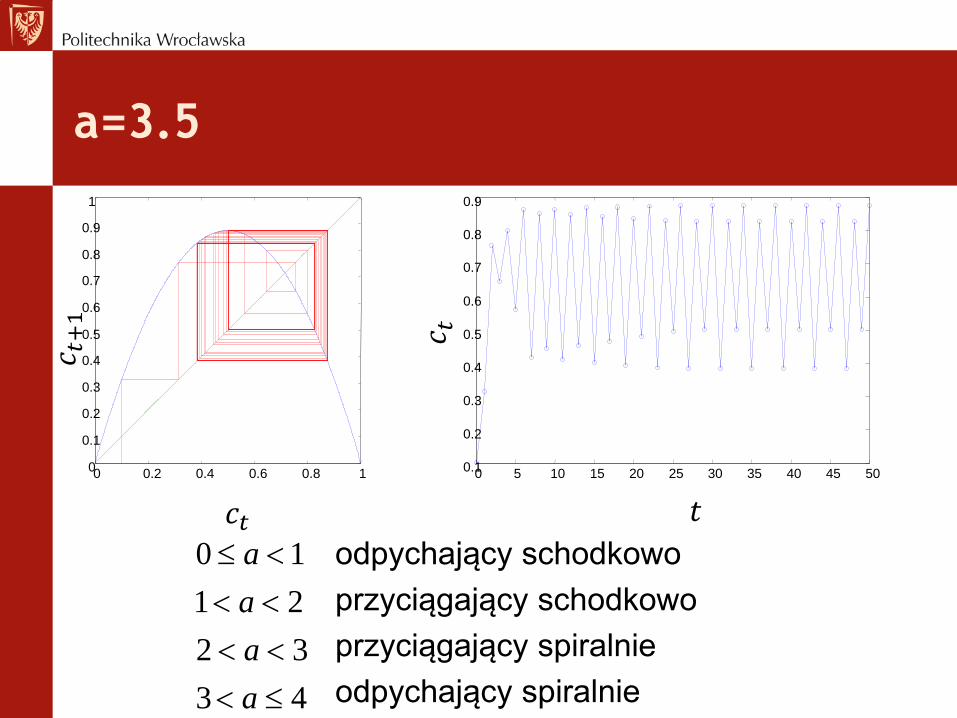
a=3.5
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 5 10 15 20 25 30 35 40 45 500.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
43
32
21
10
a
a
a
a odpychający schodkowo
przyciągający schodkowo
przyciągający spiralnie
odpychający spiralnie
𝑡
𝑐 𝑡
𝑐 𝑡+1
𝑐𝑡
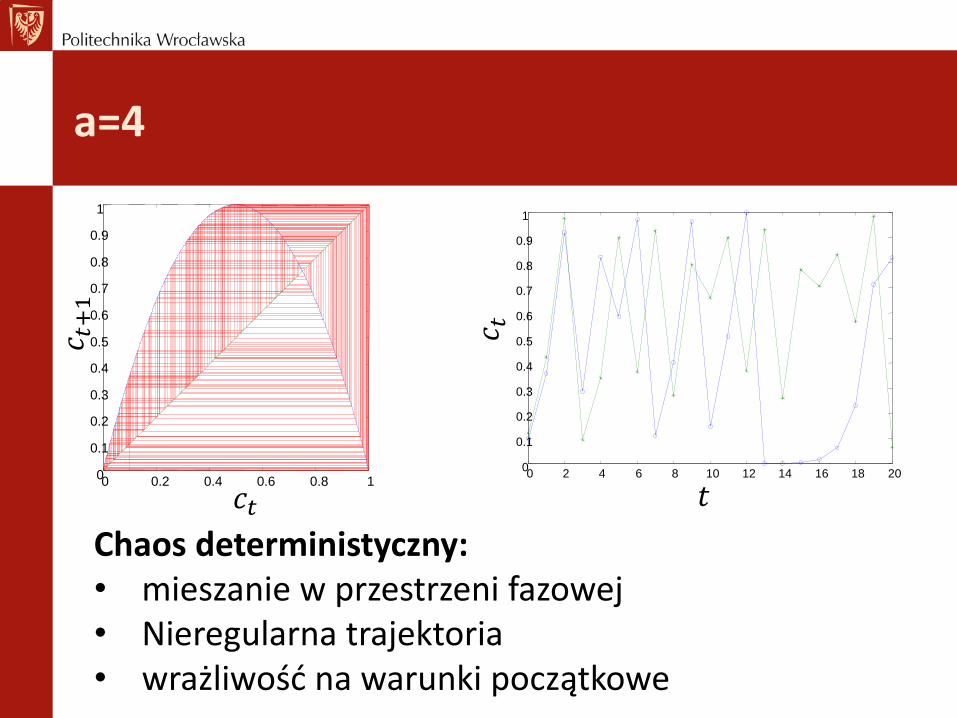
a=4
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Chaos deterministyczny: • mieszanie w przestrzeni fazowej• Nieregularna trajektoria• wrażliwość na warunki początkowe
𝑡𝑐 𝑡𝑐 𝑡+1
𝑐𝑡
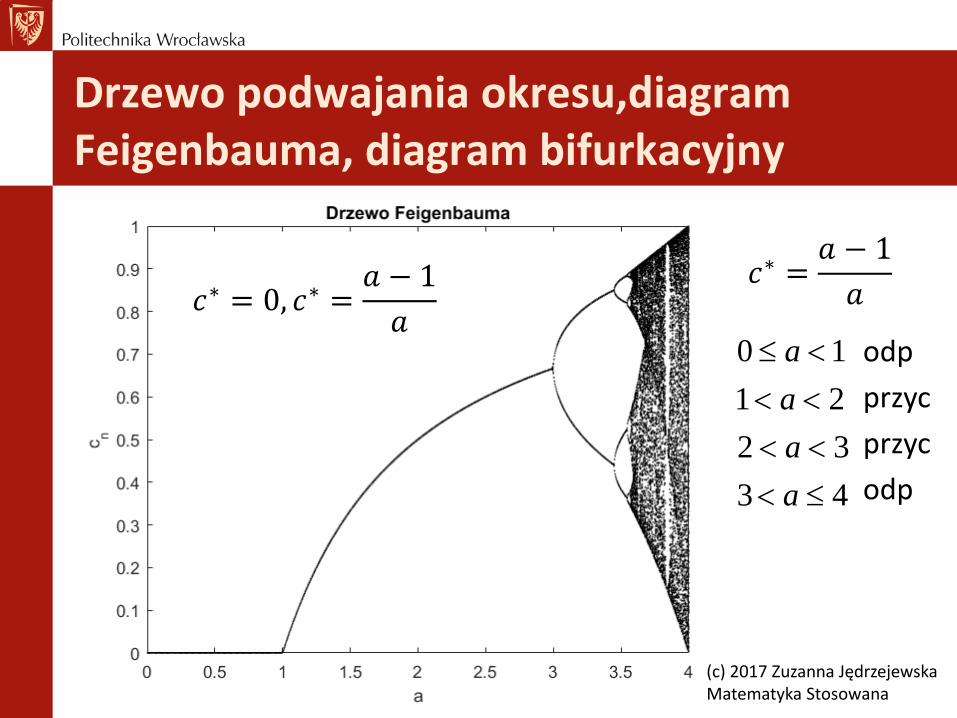
Drzewo podwajania okresu,diagram Feigenbauma, diagram bifurkacyjny
(c) 2017 Zuzanna JędrzejewskaMatematyka Stosowana
𝑐∗ = 0, 𝑐∗ =𝑎 − 1
𝑎
43
32
21
10
a
a
a
a odp
przyc
przyc
odp
𝑐∗ =𝑎 − 1
𝑎
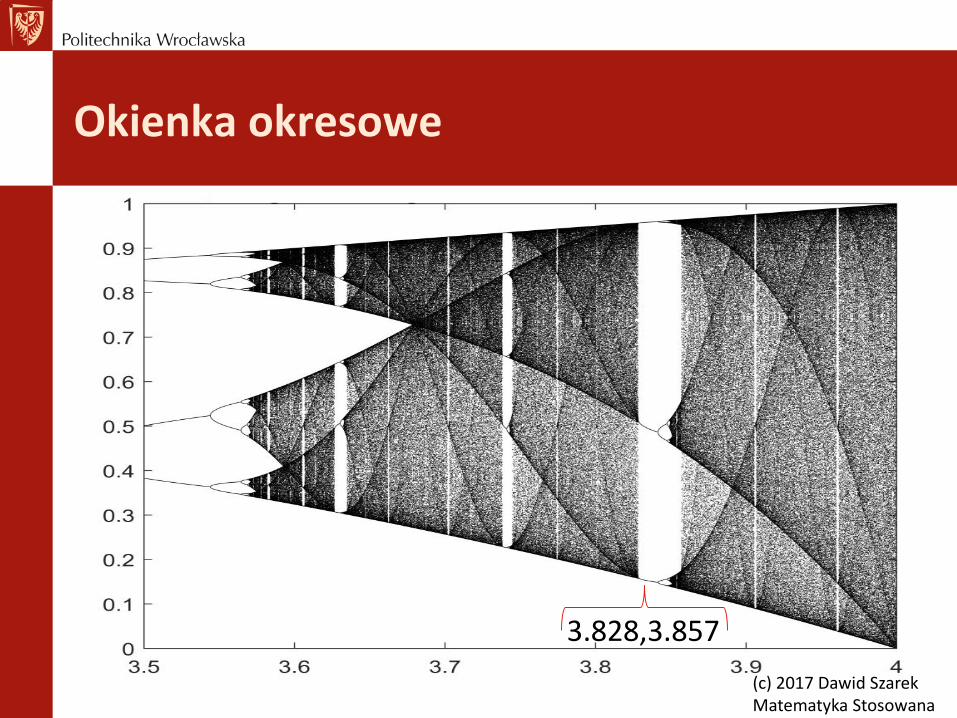
Okienka okresowe
3.828,3.857
(c) 2017 Dawid SzarekMatematyka Stosowana

Intermitencje, EX: 𝑎 = 3.828, 𝑐0 = 0.5przełączanie pomiędzy fazami cyklicznymi i chaosem
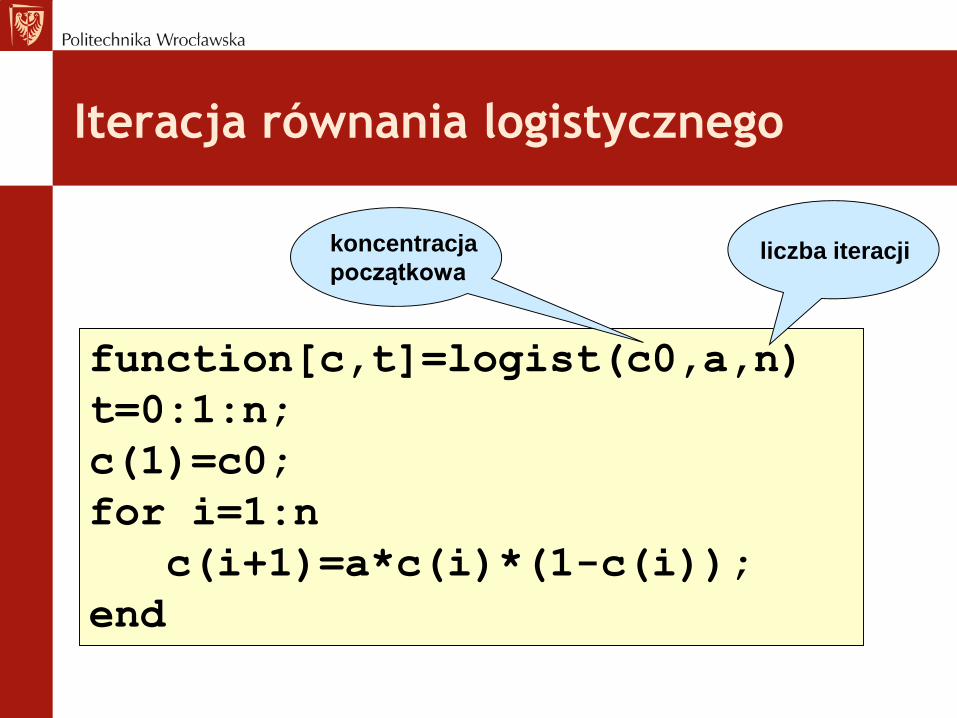
Iteracja równania logistycznego
ttt cacc 11
function[c,t]=logist(c0,a,n)
t=0:1:n;
c(1)=c0;
for i=1:n
c(i+1)=a*c(i)*(1-c(i));
end
koncentracja
początkowaliczba iteracji
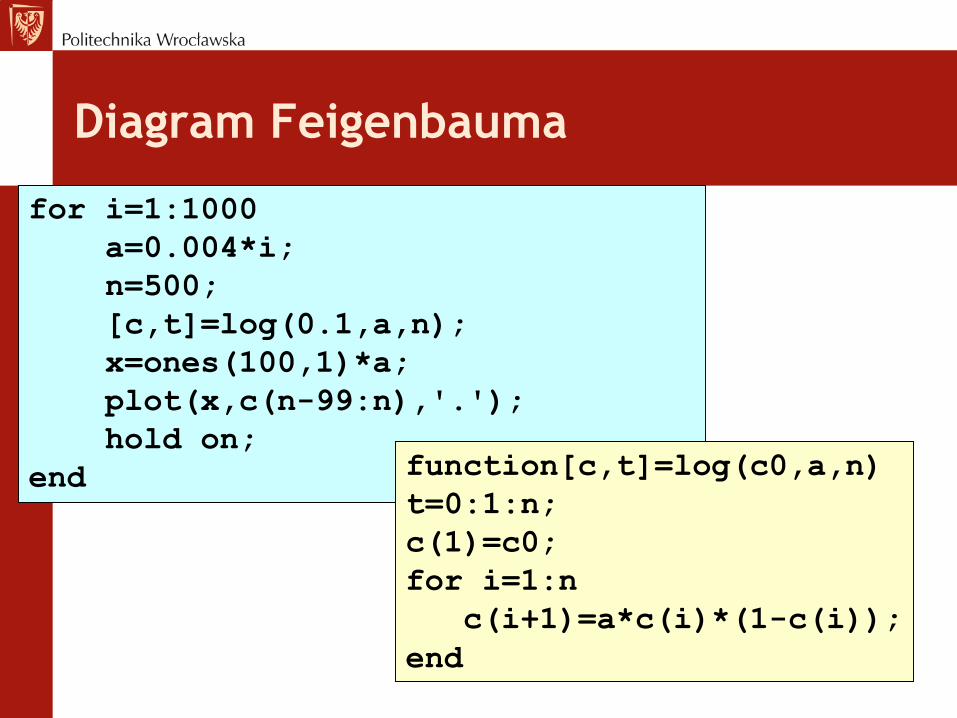
Diagram Feigenbauma
for i=1:1000
a=0.004*i;
n=500;
[c,t]=log(0.1,a,n);
x=ones(100,1)*a;
plot(x,c(n-99:n),'.');
hold on;
end function[c,t]=log(c0,a,n)
t=0:1:n;
c(1)=c0;
for i=1:n
c(i+1)=a*c(i)*(1-c(i));
end
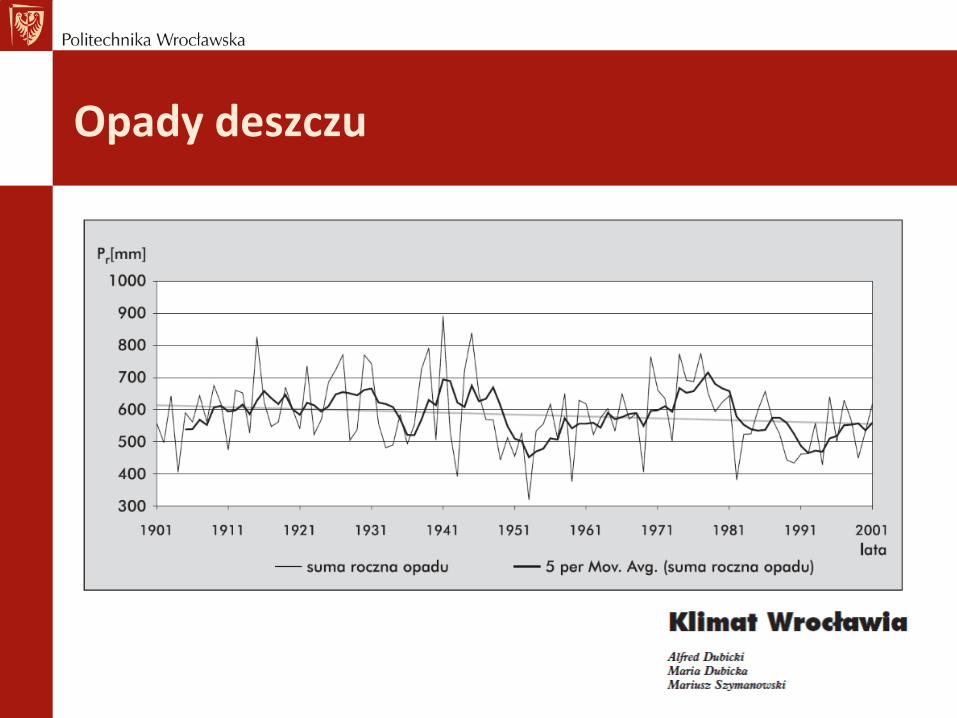
Opady deszczu
Konwekcja
• Gorące powietrze unosi się do góry • chmury burzowe powstają w wyniku konwekcji• 1962, Saltzman – równania dla prostej konwekcji
(c) http://www.satirnet.com (c) http://www.satirnet.com
Model pogody wg. Lorenza
• Edward Lorenz, MIT w 1961 (w wieku 44 lat)
• Przypadek a może lenistwo?
• Odkrycie – małe zmiany warunków początkowych prowadzą do zupełnie innych prognoz pogody.
• Punkt wyjścia – uproszczone równania konwekcji
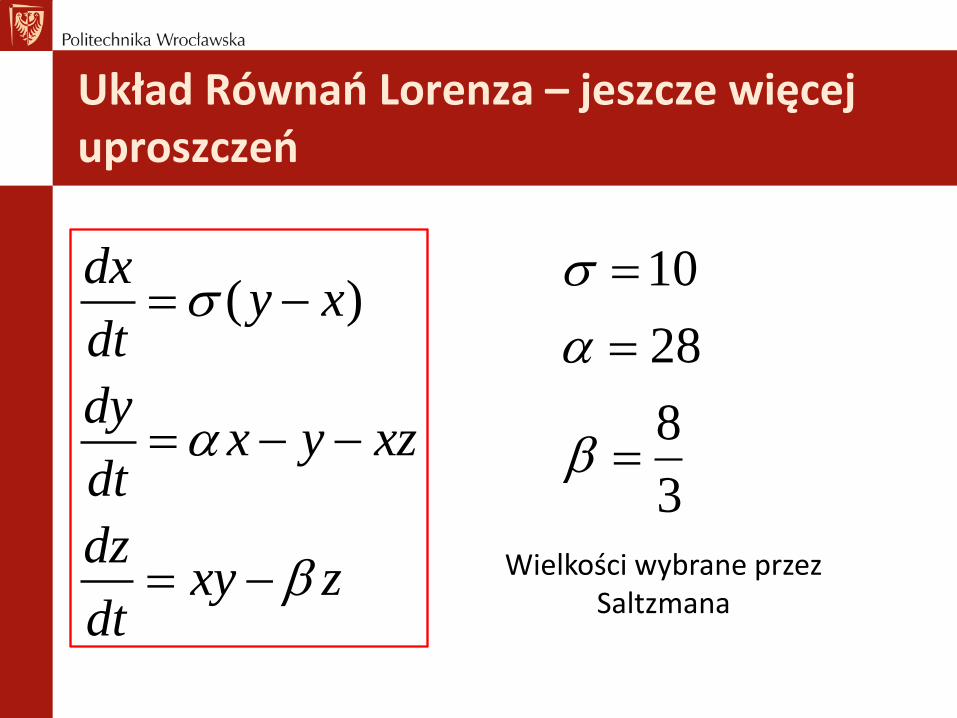
Układ Równań Lorenza – jeszcze więcej uproszczeń
( )dx
y xdt
dyx y xz
dt
dzxy z
dt
3
8
28
10
Wielkości wybrane przez Saltzmana
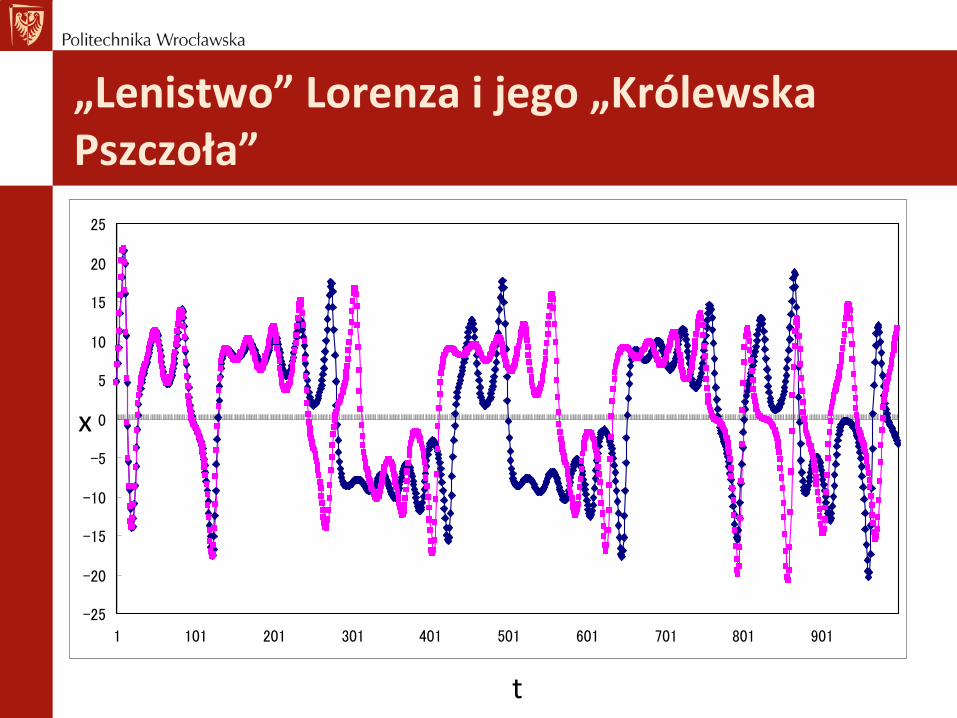
„Lenistwo” Lorenza i jego „Królewska Pszczoła”
-25
-20
-15
-10
-5
0
5
10
15
20
25
1 101 201 301 401 501 601 701 801 901
t
x
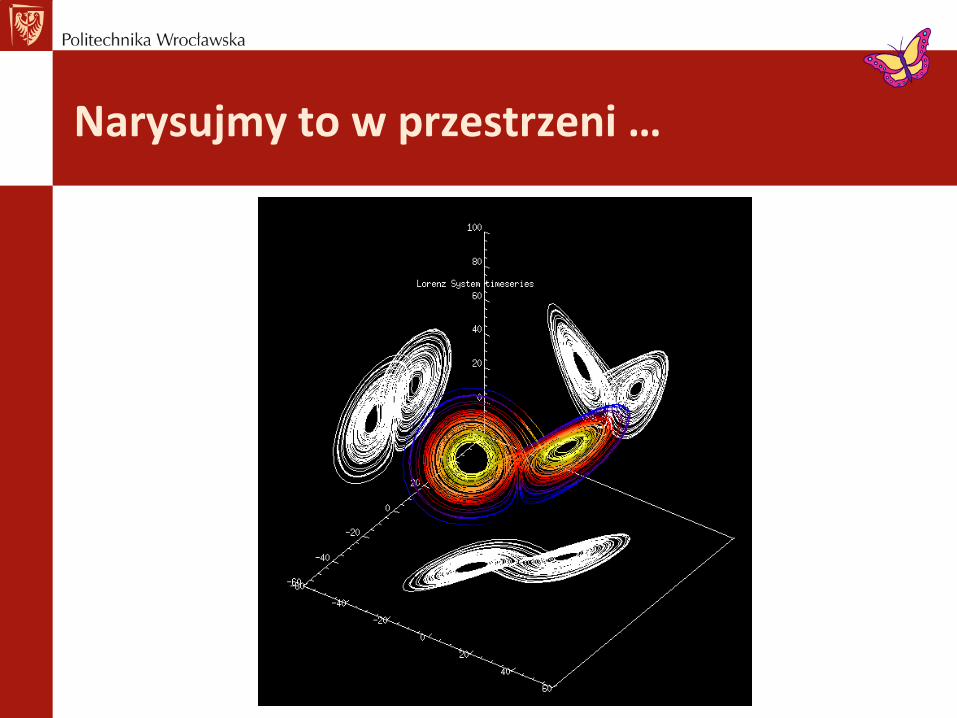
Narysujmy to w przestrzeni …
Cechy atraktora Lorenza
• Trajektorie są przyciągane przez ograniczony obszar przestrzeni fazowej
• Ruch jest nieregularny
• Wrażliwość na warunki początkowe (sekwencja pętli)
• Ten atraktor jest dziwny!
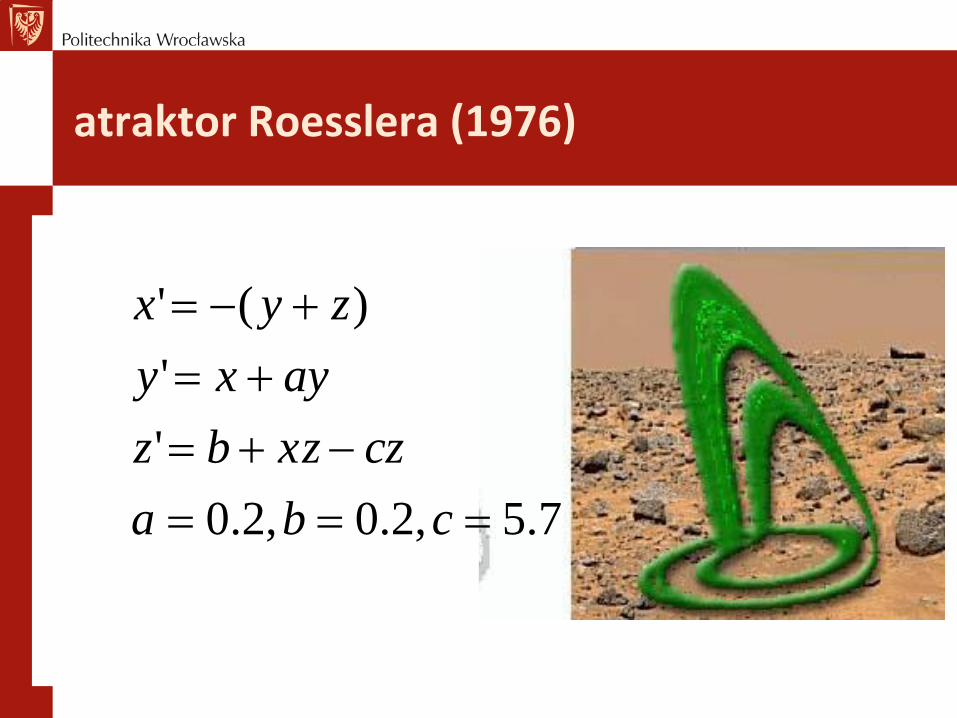
atraktor Roesslera (1976)
7.5,2.0,2.0
'
'
)('
cba
czxzbz
ayxy
zyx
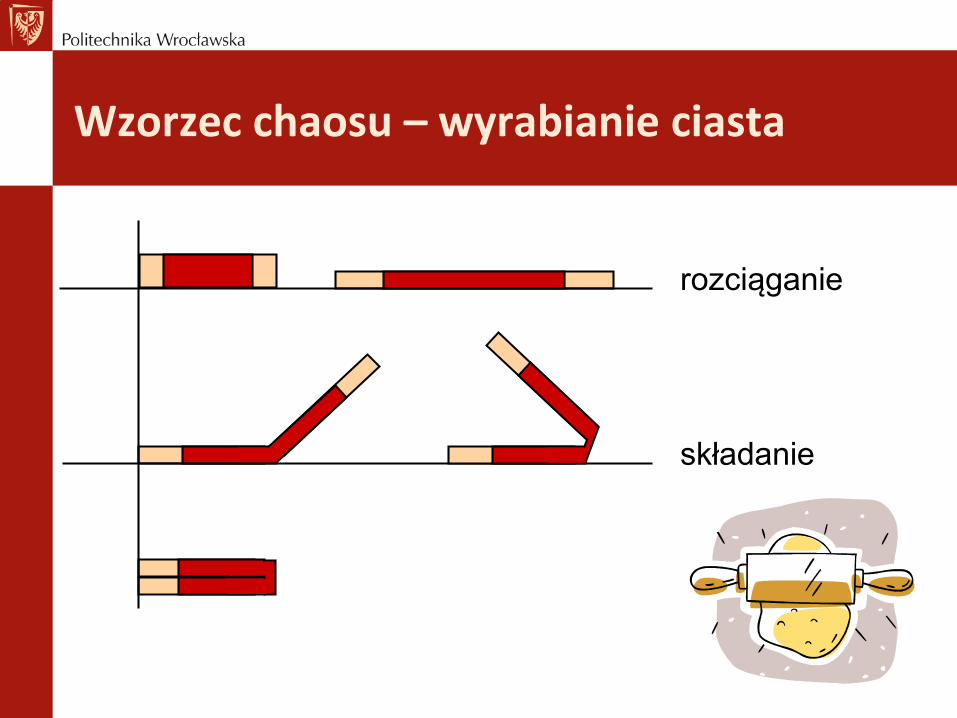
Wzorzec chaosu – wyrabianie ciasta
rozciąganie
składanie
Gdzie są rodzynki?
Odległość
rośnie
wykładniczo
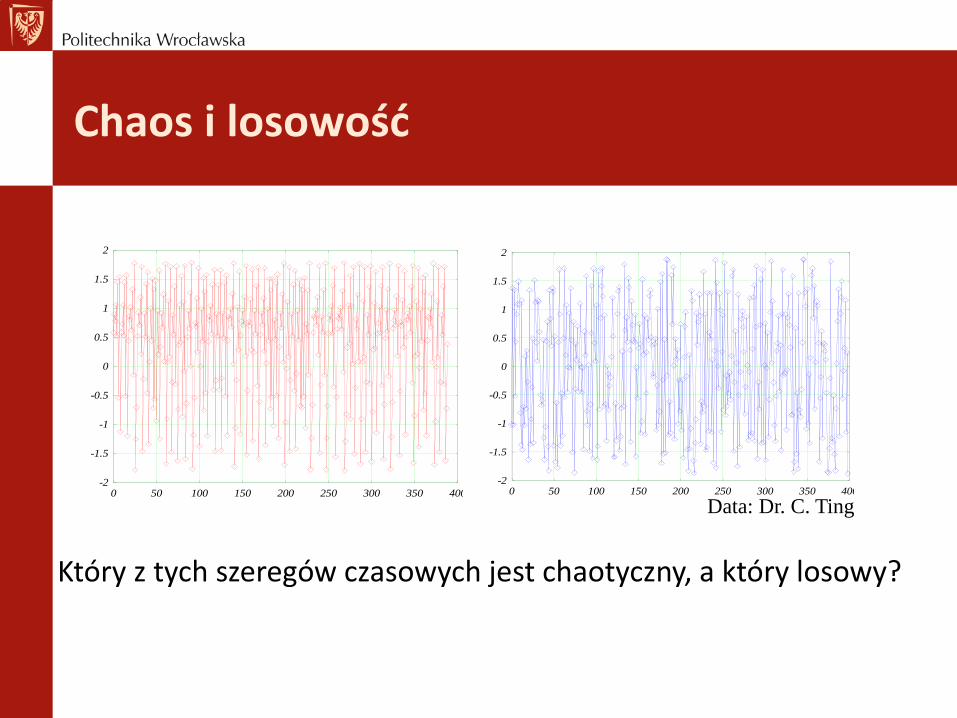
Chaos i losowość
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 50 100 150 200 250 300 350 400
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 50 100 150 200 250 300 350 400
Data: Dr. C. Ting
Który z tych szeregów czasowych jest chaotyczny, a który losowy?
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 50 100 150 200 250 300 350 400
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 50 100 150 200 250 300 350 400
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
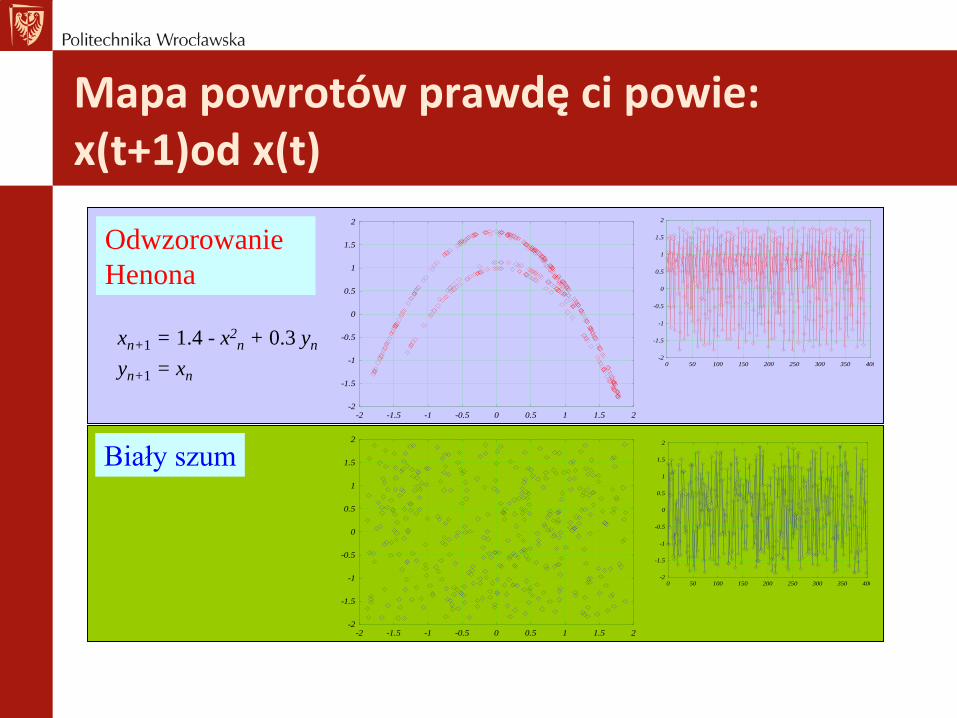
xn+1 = 1.4 - x2n + 0.3 yn
yn+1 = xn
Biały szum
Odwzorowanie
Henona
Mapa powrotów prawdę ci powie: x(t+1)od x(t)
Pomyśl o tym
Ćwiczenie: Drgania tłumione
• Opór powietrza, wody itd. tłumi oscylacje
• Załóżmy, że siła oporu:
𝐹𝑥 = −𝑏𝑣𝑥 = −𝑏𝑑𝑥
𝑑𝑡• II zasada dynamiki:
𝑚𝑎𝑥 = −𝑏𝑣𝑥 − 𝑘𝑥 → 𝑚𝑑2𝑥
𝑑𝑡2= −𝑏
𝑑𝑥
𝑑𝑡− 𝑘𝑥
𝑚 ሷ𝑥 + 𝑏 ሶ𝑥 + 𝑘𝑥 = 0
ሷ𝑥 +𝑏
𝑚ሶ𝑥 +
𝑘
𝑚𝑥 = 0
ሷ𝑥 + 2𝛽 ሶ𝑥 + 𝜔02𝑥 = 0
Ćwiczenie: Drgania tłumione
• Rozwiąż równanie:𝑚 ሷ𝑥 + 2𝛽 ሶ𝑥 + 𝜔0
2𝑥 = 0
• Rozwiązania szukaj w postaci:𝑥 𝑡 = 𝑒𝛼𝑡
• Otrzymasz rozwiązanie:
𝑥 𝑡 = 𝐶1𝑒𝛼1𝑡 + 𝐶2𝑒
𝛼2𝑡 , gdzie 𝛼1,2 = −𝛽 ± 𝛽2 − 𝜔02
𝑥 𝑡 = 𝑒−𝛽𝑡 𝐶1𝑒𝛽2−𝜔0
2𝑡+ 𝐶2𝑒
− 𝛽2−𝜔02𝑡
Ćwiczenie: Drgania tłumione
𝑥 𝑡 = 𝑒−𝛽𝑡 𝐶1𝑒𝛽2−𝜔0
2𝑡+ 𝐶2𝑒
− 𝛽2−𝜔02𝑡
• Drgania nietłumione: 𝛽 = 0
𝑥 𝑡 = 𝐶1𝑒−𝜔0
2𝑡+ 𝐶2𝑒
− −𝜔02𝑡
= 𝐶1𝑒𝑖 𝜔0
2𝑡+ 𝐶2𝑒
−𝑖 𝜔02𝑡= 𝐶1𝑒
𝑖𝜔0𝑡 + 𝐶2𝑒−𝑖𝜔0𝑡
Ćwiczenie: Drgania tłumione
𝑥 𝑡 = 𝑒−𝛽𝑡 𝐶1𝑒𝛽2−𝜔0
2𝑡+ 𝐶2𝑒
− 𝛽2−𝜔02𝑡
• Drgania słabo tłumione 𝛽 < 𝜔0 → 𝛽2 − 𝜔02 < 0
𝑥 𝑡 = 𝑒−𝛽𝑡 𝐶1𝑒𝑖 𝜔0
2−𝛽2𝑡+ 𝐶2𝑒
−𝑖 𝜔02−𝛽2𝑡
𝑥 𝑡 = 𝑒−𝛽𝑡 𝐶1𝑒𝑖𝜔1𝑡 + 𝐶2𝑒
−𝑖𝜔1𝑡 , 𝜔1 = 𝜔02 − 𝛽2
• Drgania krytyczne 𝛽 = 𝜔0
𝑥 𝑡 = 𝐶1𝑒−𝛽𝑡 + 𝐶2𝑡𝑒
−𝛽𝑡
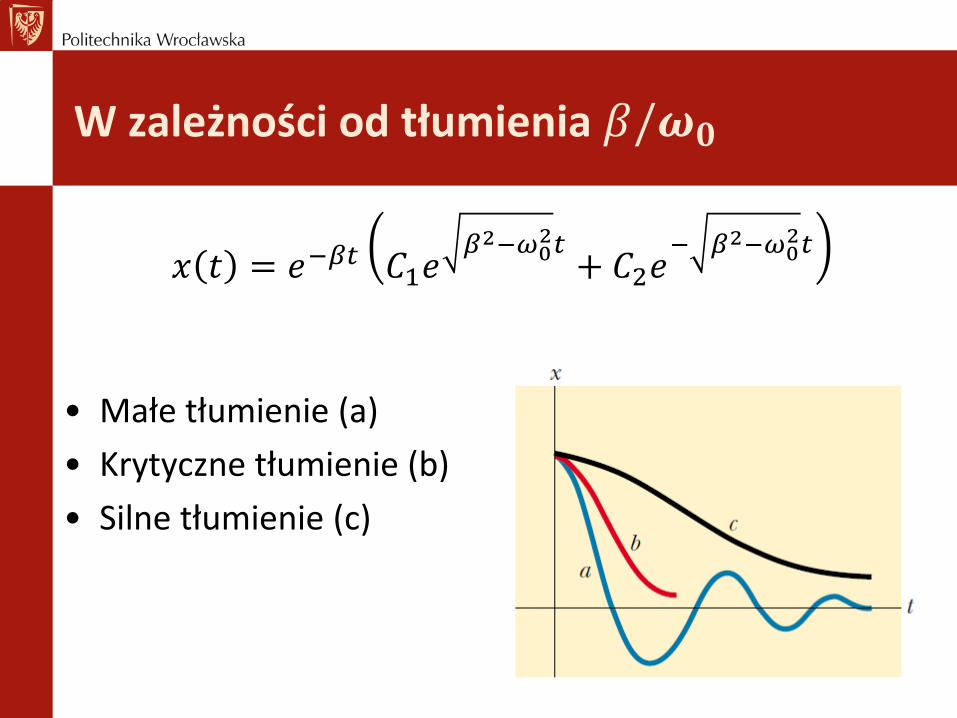
W zależności od tłumienia 𝛽/𝝎𝟎
• Małe tłumienie (a)
• Krytyczne tłumienie (b)
• Silne tłumienie (c)
𝑥 𝑡 = 𝑒−𝛽𝑡 𝐶1𝑒𝛽2−𝜔0
2𝑡+ 𝐶2𝑒
− 𝛽2−𝜔02𝑡
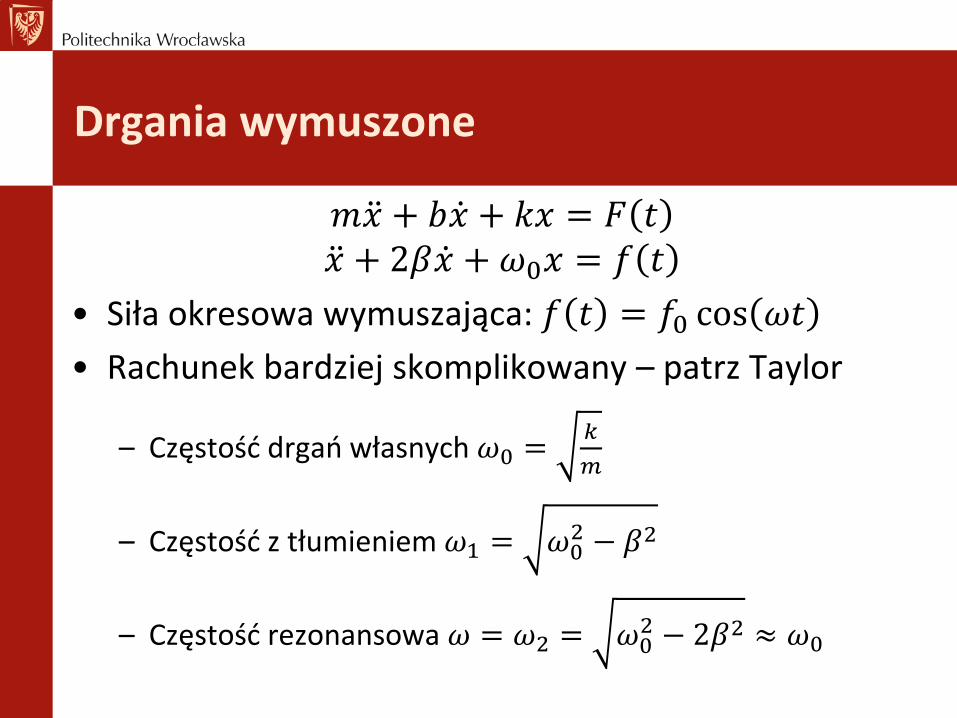
Drgania wymuszone
• Siła okresowa wymuszająca: 𝑓 𝑡 = 𝑓0 cos 𝜔𝑡
• Rachunek bardziej skomplikowany – patrz Taylor
– Częstość drgań własnych 𝜔0 =𝑘
𝑚
– Częstość z tłumieniem 𝜔1 = 𝜔02 − 𝛽2
– Częstość rezonansowa 𝜔 = 𝜔2 = 𝜔02 − 2𝛽2 ≈ 𝜔0
𝑚 ሷ𝑥 + 𝑏 ሶ𝑥 + 𝑘𝑥 = 𝐹 𝑡ሷ𝑥 + 2𝛽 ሶ𝑥 + 𝜔0𝑥 = 𝑓 𝑡
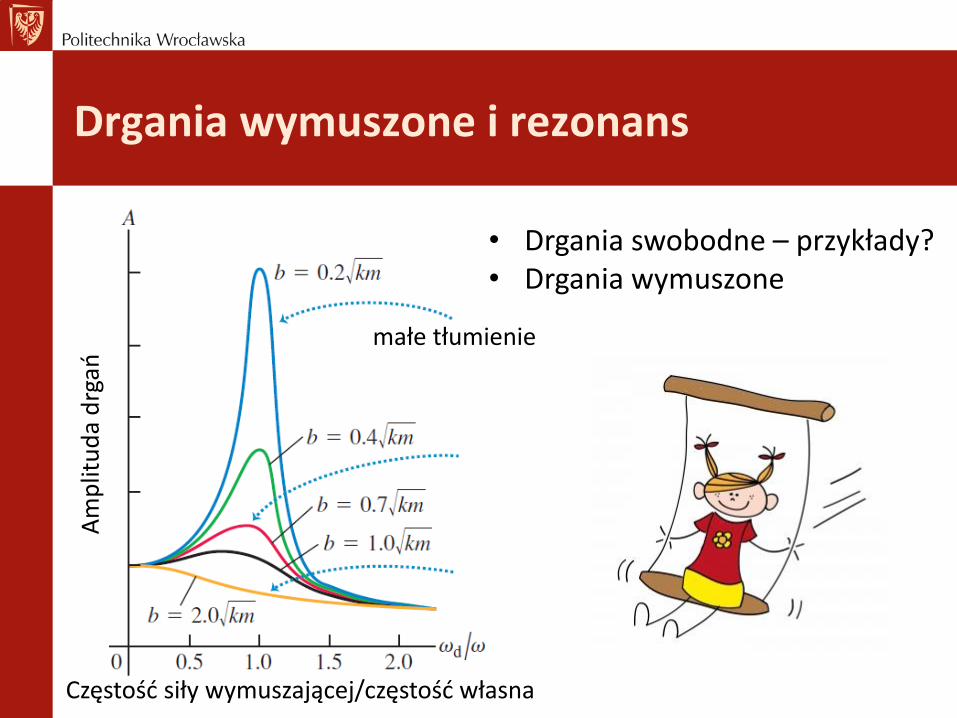
Drgania wymuszone i rezonans
• Drgania swobodne – przykłady?• Drgania wymuszone
Częstość siły wymuszającej/częstość własna
Am
plit
ud
a d
rgań
małe tłumienie
Równania różniczkowe rzędu pierwszego
• Równanie różniczkowe liniowe rzędu pierwszego𝑑𝑦
𝑑𝑥+ 𝑝 𝑥 𝑦 = 𝑓(𝑥),
𝑝 𝑥 , 𝑓(𝑥) funkcje ciągłe na przedziale 𝑎, 𝑏 :
• jednorodne: 𝑓 𝑥 = 0
• niejednorodne: 𝑓 𝑥 ≠ 0
• Rozwiązanie równania jednorodnego𝑑𝑦
𝑑𝑥+ 𝑝 𝑥 𝑦 = 0 →
𝑑𝑦
𝑑𝑥= −𝑝 𝑥 𝑦 →
𝑑𝑦
𝑦= −𝑝 𝑥 𝑑𝑥
ln 𝑦 = −𝑃 𝑥 + 𝑙𝑛𝐶 → 𝑦 = Cexp(−P(x))
𝑃 𝑥 - funkcja pierwotna 𝑝 𝑥
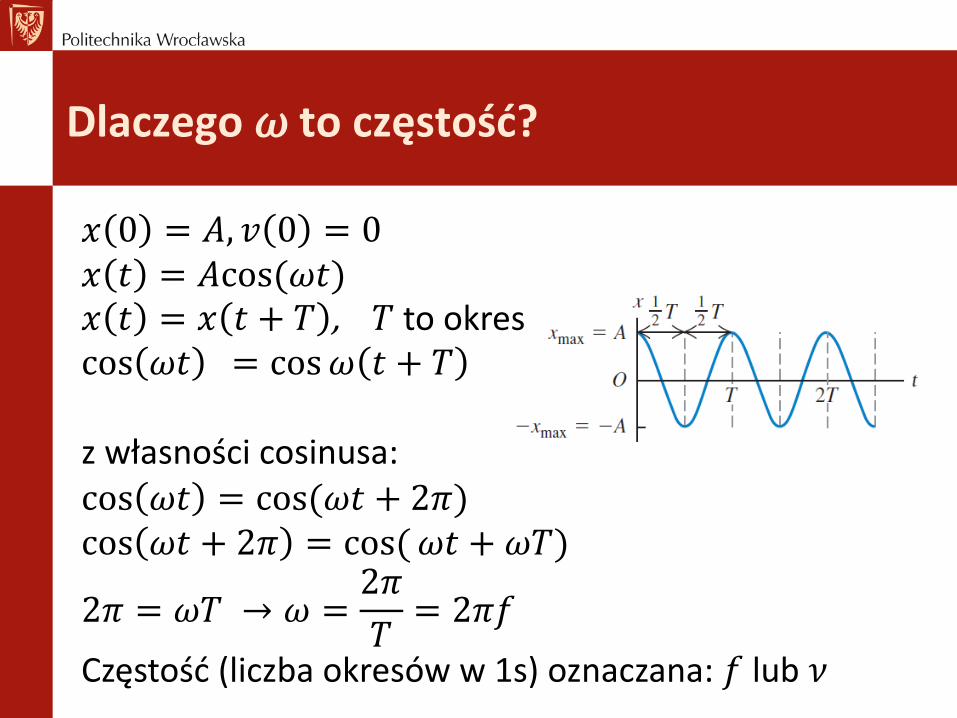
Dlaczego 𝜔 to częstość?
𝑥 0 = 𝐴, 𝑣 0 = 0𝑥 𝑡 = 𝐴cos(𝜔𝑡)𝑥 𝑡 = 𝑥 𝑡 + 𝑇 , 𝑇 to okrescos 𝜔𝑡 = cos𝜔 𝑡 + 𝑇
z własności cosinusa:cos 𝜔𝑡 = cos(𝜔𝑡 + 2𝜋)cos 𝜔𝑡 + 2𝜋 = cos(𝜔𝑡 + 𝜔𝑇)
2𝜋 = 𝜔𝑇 → 𝜔 =2𝜋
𝑇= 2𝜋𝑓
Częstość (liczba okresów w 1s) oznaczana: 𝑓 lub 𝜈
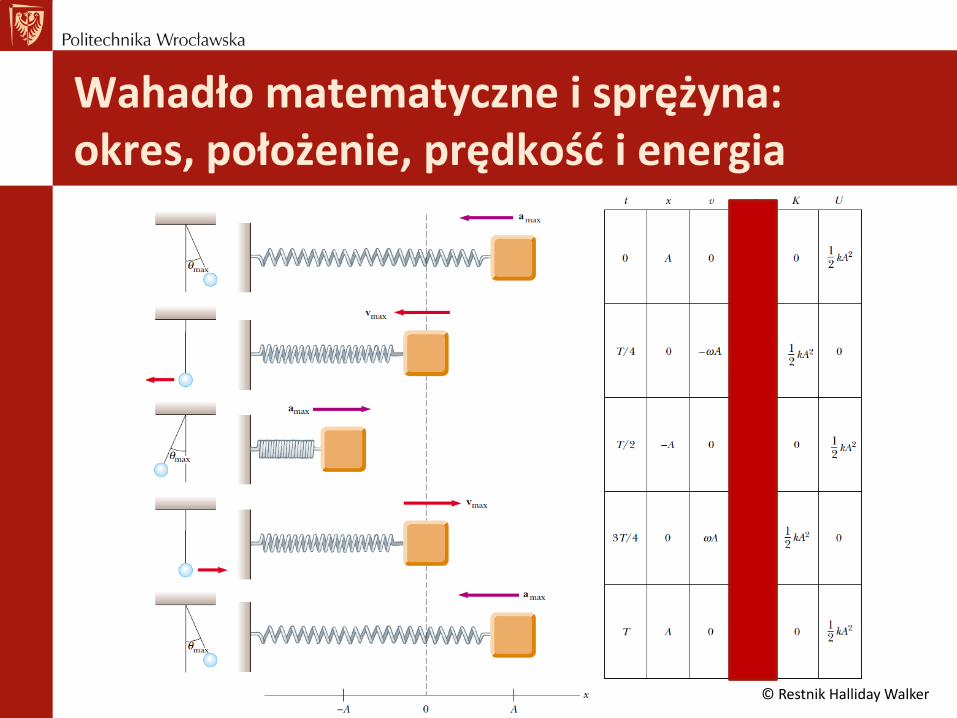
Wahadło matematyczne i sprężyna:okres, położenie, prędkość i energia
© Restnik Halliday Walker