![Tech Info share 2015 Q2 CDA Team 2...許容最大負荷:0.25 [N*m] 許容最大負荷:0.24 [N*m] センサ付き Simulink APIを用いたパラメータスタディ例 ... Tech](https://static.fdocuments.pl/doc/165x107/5f4ad584cd69c8669a4eaa56/tech-info-share-2015-q2-cda-team-2-eoeeei025-nm-eoeeei024.jpg)
Część I. Model dynamiczny maszyny z uzwojeniem wzbudzenia. · Weryfikacja modelu i symulacja...
18
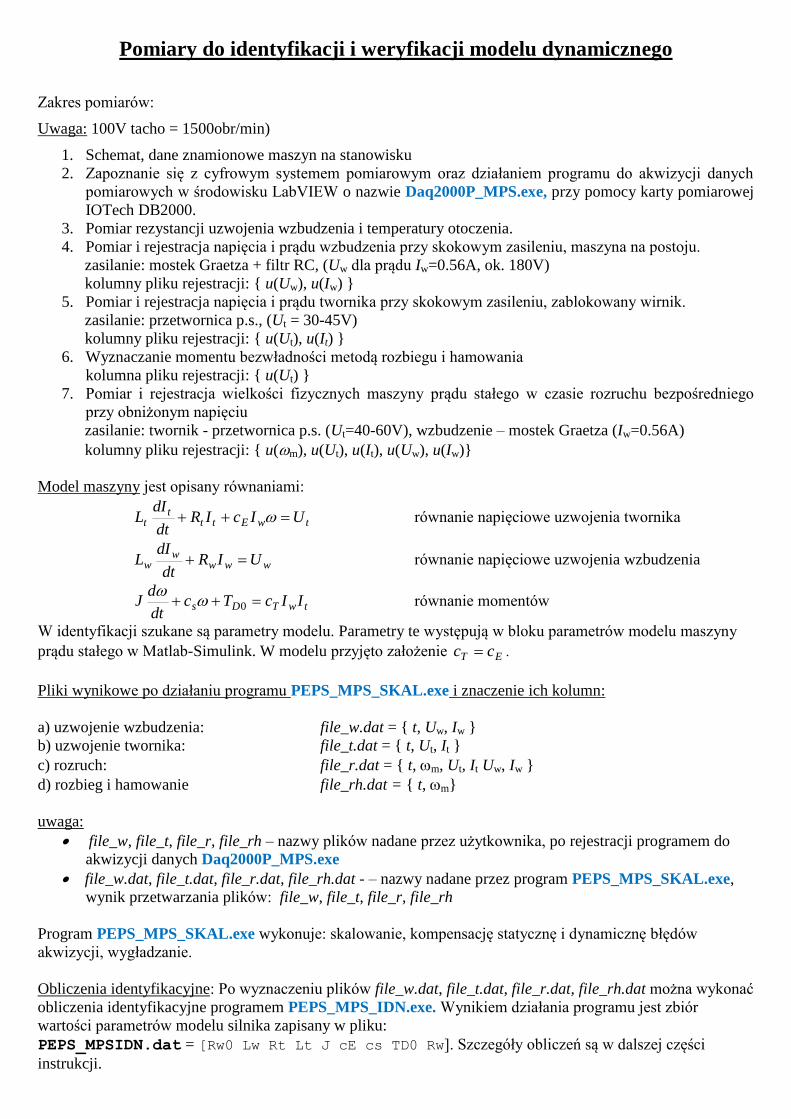
Wiesław Jażdżyński INSTRUKCJA I MATERIAŁY POMOCNICZE Ćwiczenie Przedmiot: Podzespoły Elektryczne Pojazdów Samochodowych MPS_1-3 Temat: Modele maszyn prądu stałego Część I. Model dynamiczny maszyny z uzwojeniem wzbudzenia. Zakres ćwiczenia: 1. Pomiary do identyfikacji i weryfikacji modelu dynamicznego maszyny p.s. o mocy P N =3.3kW 2. Opracowanie wyników pomiarowych i wyznaczanie modelu 3. Weryfikacja modelu i symulacja dynamiki w Matlab-Simulink Zakres pomiarów : 1. Wyznaczanie parametrów uzwojenia wzbudzenia 2. Wyznaczanie parametrów uzwojenia twornika (zablokowany wirnik) 3. Wyznaczanie momentu bezwładności 4. Rozruch Stanowisko pomiarowe: Rys. 1 Schemat układu pomiarowego stanowiska MPS1.
-
Upload
trinhnguyet -
Category
Documents
-
view
214 -
download
0
Transcript of Część I. Model dynamiczny maszyny z uzwojeniem wzbudzenia. · Weryfikacja modelu i symulacja...
Wiesław Jażdżyński
INSTRUKCJA I MATERIAŁY POMOCNICZE
Ćwiczenie Przedmiot: Podzespoły Elektryczne Pojazdów Samochodowych
MPS_1-3 Temat: Modele maszyn prądu stałego
Część I. Model dynamiczny maszyny z uzwojeniem wzbudzenia.
Zakres ćwiczenia:
1. Pomiary do identyfikacji i weryfikacji modelu dynamicznego maszyny p.s. o mocy PN=3.3kW
2. Opracowanie wyników pomiarowych i wyznaczanie modelu
3. Weryfikacja modelu i symulacja dynamiki w Matlab-Simulink
Zakres pomiarów:
1. Wyznaczanie parametrów uzwojenia wzbudzenia
2. Wyznaczanie parametrów uzwojenia twornika (zablokowany wirnik)
3. Wyznaczanie momentu bezwładności
4. Rozruch
Stanowisko pomiarowe:
Rys. 1 Schemat układu pomiarowego stanowiska MPS1.
Pomiary do identyfikacji i weryfikacji modelu dynamicznego
Zakres pomiarów:
Uwaga: 100V tacho = 1500obr/min)
1. Schemat, dane znamionowe maszyn na stanowisku
2. Zapoznanie się z cyfrowym systemem pomiarowym oraz działaniem programu do akwizycji danych
pomiarowych w środowisku LabVIEW o nazwie Daq2000P_MPS.exe, przy pomocy karty pomiarowej
IOTech DB2000.
3. Pomiar rezystancji uzwojenia wzbudzenia i temperatury otoczenia.
4. Pomiar i rejestracja napięcia i prądu wzbudzenia przy skokowym zasileniu, maszyna na postoju.
zasilanie: mostek Graetza + filtr RC, (Uw dla prądu Iw=0.56A, ok. 180V)
kolumny pliku rejestracji: u(Uw), u(Iw)
5. Pomiar i rejestracja napięcia i prądu twornika przy skokowym zasileniu, zablokowany wirnik.
zasilanie: przetwornica p.s., (Ut = 30-45V)
kolumny pliku rejestracji: u(Ut), u(It)
6. Wyznaczanie momentu bezwładności metodą rozbiegu i hamowania
kolumna pliku rejestracji: u(Ut)
7. Pomiar i rejestracja wielkości fizycznych maszyny prądu stałego w czasie rozruchu bezpośredniego
przy obniżonym napięciu
zasilanie: twornik - przetwornica p.s. (Ut=40-60V), wzbudzenie – mostek Graetza (Iw=0.56A)
kolumny pliku rejestracji: u(m), u(Ut), u(It), u(Uw), u(Iw)
Model maszyny jest opisany równaniami:
twEttt
t UIcIRdt
dIL równanie napięciowe uzwojenia twornika
wwww
w UIRdt
dIL równanie napięciowe uzwojenia wzbudzenia
twTDs IIcTcdt
dJ 0
równanie momentów
W identyfikacji szukane są parametry modelu. Parametry te występują w bloku parametrów modelu maszyny
prądu stałego w Matlab-Simulink. W modelu przyjęto założenie ET cc .
Pliki wynikowe po działaniu programu PEPS_MPS_SKAL.exe i znaczenie ich kolumn:
a) uzwojenie wzbudzenia: file_w.dat = t, Uw, Iw
b) uzwojenie twornika: file_t.dat = t, Ut, It
c) rozruch: file_r.dat = t, m, Ut, It Uw, Iw
d) rozbieg i hamowanie file_rh.dat = t, m
uwaga:
file_w, file_t, file_r, file_rh – nazwy plików nadane przez użytkownika, po rejestracji programem do
akwizycji danych Daq2000P_MPS.exe
file_w.dat, file_t.dat, file_r.dat, file_rh.dat - – nazwy nadane przez program PEPS_MPS_SKAL.exe,
wynik przetwarzania plików: file_w, file_t, file_r, file_rh
Program PEPS_MPS_SKAL.exe wykonuje: skalowanie, kompensację statycznę i dynamicznę błędów
akwizycji, wygładzanie.
Obliczenia identyfikacyjne: Po wyznaczeniu plików file_w.dat, file_t.dat, file_r.dat, file_rh.dat można wykonać
obliczenia identyfikacyjne programem PEPS_MPS_IDN.exe. Wynikiem działania programu jest zbiór
wartości parametrów modelu silnika zapisany w pliku:
PEPS_MPSIDN.dat = [Rw0 Lw Rt Lt J cE cs TD0 Rw]. Szczegóły obliczeń są w dalszej części
instrukcji.

Opracowanie wyników pomiarowych
Wszystkie wartości liczbowe wielkości fizycznych są podane w instrukcji w jednostkach SI.
1. Skokowe załączenie napięcia na uzwojenie wzbudzenia
Zarejestrowane są napięcie Uw i prąd wzbudzenia Iw od załączenia do uzyskania stanu ustalonego.
Wyznaczane są parametry Rw i Lw równania:
wwww
w UIRdt
dIL
metodą regresji liniowej.
interface programu do akwizycji danych Daq2000P_MPS.exe po pomiarze.
Wynik działania programu: file_w u(Uw), u(Iw)
file_w – nazwa pliku akwizycji danych wprowadzona przez użytkownika
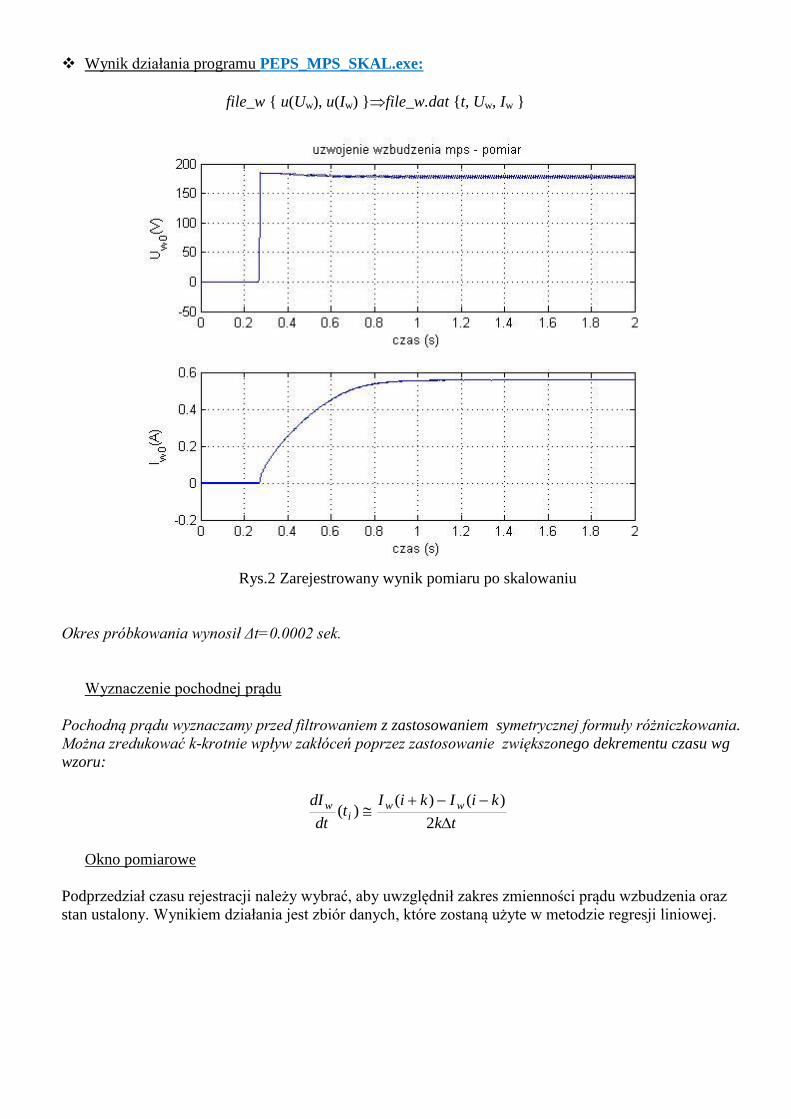
Wynik działania programu PEPS_MPS_SKAL.exe:
file_w u(Uw), u(Iw) file_w.dat t, Uw, Iw
Rys.2 Zarejestrowany wynik pomiaru po skalowaniu
Okres próbkowania wynosił Δt=0.0002 sek.
Wyznaczenie pochodnej prądu
Pochodną prądu wyznaczamy przed filtrowaniem z zastosowaniem symetrycznej formuły różniczkowania.
Można zredukować k-krotnie wpływ zakłóceń poprzez zastosowanie zwiększonego dekrementu czasu wg
wzoru:
tk
kiIkiIt
dt
dI wwi
w
2
)()()(
Okno pomiarowe
Podprzedział czasu rejestracji należy wybrać, aby uwzględnił zakres zmienności prądu wzbudzenia oraz
stan ustalony. Wynikiem działania jest zbiór danych, które zostaną użyte w metodzie regresji liniowej.

Rys.2 Wybrane okno pomiarowe z uwzględnieniem funkcji pochodnej prądu
Kolor czerwony – po zastosowaniu filtru cyfrowego.
Jako wynik pośredni na dysku jest zapisany plik MPS_WZBf.dat = [t Uw Uwf Iw Iwf dIw dIwf]
Litera „f” oznacza wielkość po zastosowaniu filtru cyfrowego dolnoprzepustowego.
Wyznaczenie parametrów uzwojenia wzbudzenia metodą regresji liniowej.
BAAAL
R TT
wr
wr
1)( ,
i
w
iwdt
dIIA ,
iwUB
W analizowanym przykładzie uzyskano wynik: Rwr = 314.56 [Ω], Lwr = 72.654 [H]
Uwaga: parametry można wyznaczyć kolejno – najpierw Rw0 z prawa Ohma dla stanu ustalonego, a następnie
Lw metodą regresji liniowej. Wtedy w przykładzie otrzymuje się: Rw0 = 319.04 [Ω], Lw = 71.486 [H]

2. Skokowe załączenie napięcia na uzwojenie twornika przy zablokowanym
wirniku
Zarejestrowane są napięcie Ut i prąd twornika It do uzyskania stanu ustalonego.
Przy zablokowanym wirniku SEM rotacji w uzwojeniu twornika jest równe zero i równanie obwodu twornika
ma postać:.
tttt
t UIRdt
dIL
Parametry Rt i Lt równania są wyznaczane metodą regresji liniowej.
Postępowanie, kolejność operacji i uwagi są podobne jak w przypadku uzwojenia wzbudzenia.
interface programu do akwizycji danych Daq2000P_MPS.exe po pomiarze.
Wynik działania programu: file_t u(Ut), u(It)
file_t – nazwa pliku akwizycji danych wprowadzona przez użytkownika

Wynik działania programu PEPS_MPS_SKAL.exe: `
file_t u(Ut), u(It) file_t.dat t, Ut, It
Rys. 3a. Zarejestrowany wynik pomiaru po skalowaniu (okres próbkowania Δt=0.0001sek).
Rys. 3b. Okno pomiarowe z pochodną prądu
Pochodną prądu twornika względem czasu liczono podobnie jak w przypadku prądu wzbudzenia.
W przykładzie otrzymano wynik: Rt = 0.9548 [Ω], Lt = 0.025623 [H]
Jako wynik pośredni na dysku jest zapisany plik MPS_TWRf.dat = [t Ut Utf It Itf dIt dItf]

3. 4. Wyznaczanie momentu bezwładności.
interface programu do akwizycji danych Daq2000P_MPS.exe po pomiarze.
Wynik działania programu: file_rh u(Ut)
file_rh – nazwa pliku akwizycji danych wprowadzona przez użytkownika
Funkcja prędkości kątowej silnika ωm jest zarejestrowana przy pomocy tachoprądnicy („n” na schemacie
układu pomiarowego)
Z mechanicznych równań ruchu silnika w stanie rozbiegu, a następnie hamowania silnika po osiągnięciu przez
masę m podłoża, wynika, że moment bezwładności J można wyznaczyć z zależności:
)()( **
dt
d
dt
d
mgrJ
hr
gdzie )(tr i )(th są funkcjami prędkości kątowej silnika odpowiednio w czasie rozbiegu i hamowania, m –
masa ciężaru nadająca układowi ruch pod wpływem siły ciężkości w czasie rozbiegu, g – przyspieszenie
ziemskie, a r – promień elementu, na który nawinięta jest linka. Zależność zachodzi teoretycznie dla dowolnego
max*0 .
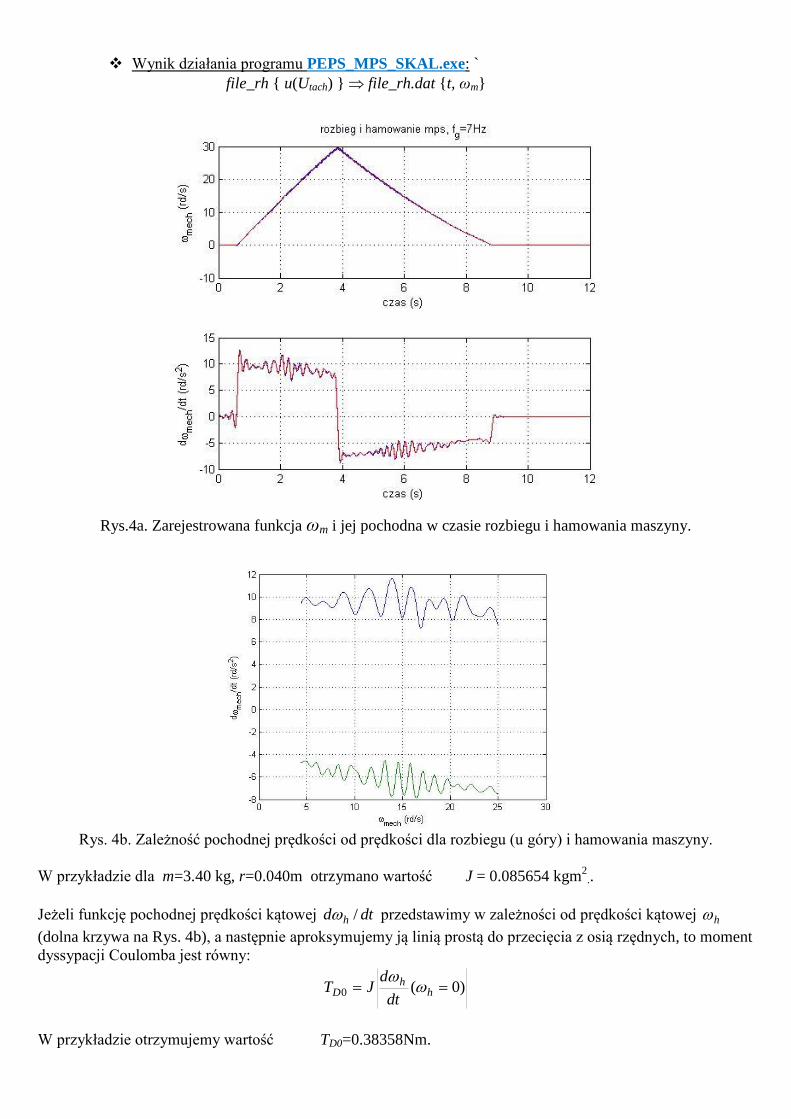
Wynik działania programu PEPS_MPS_SKAL.exe: `
file_rh u(Utach) file_rh.dat t, ωm
Rys.4a. Zarejestrowana funkcja ωm i jej pochodna w czasie rozbiegu i hamowania maszyny.
Rys. 4b. Zależność pochodnej prędkości od prędkości dla rozbiegu (u góry) i hamowania maszyny.
W przykładzie dla m=3.40 kg, r=0.040m otrzymano wartość J = 0.085654 kgm2
..
Jeżeli funkcję pochodnej prędkości kątowej dtd h / przedstawimy w zależności od prędkości kątowej h
(dolna krzywa na Rys. 4b), a następnie aproksymujemy ją linią prostą do przecięcia z osią rzędnych, to moment
dyssypacji Coulomba jest równy:
)0(0 hh
Ddt
dJT
W przykładzie otrzymujemy wartość TD0=0.38358Nm.

Rozruch bezpośredni dla obniżonego napięcia twornika, Iw=IwN
W rozruchu cały przedział pomiaru jest wykorzystany:
- początkowy dynamiczny fragment rozruchu– do weryfikacji z wynikami modelu w Simulinku
- stan ustalony – do wyznaczenia parametrów modelu: cE, cs., oraz Rw
interface programu do akwizycji danych Daq2000P_MPS.exe po pomiarze.
Wynik działania programu PEPS_MPS_SKAL.exe: `
file_r u(Utach), u(Ut), u(It), u(Uw), u(Iw) file_r.dat t, m, Ut, It Uw, Iw
file_r – nazwa pliku akwizycji danych wprowadzona przez użytkownika
Wynik rejestracji w postaci graficznej jest na rys. 5.
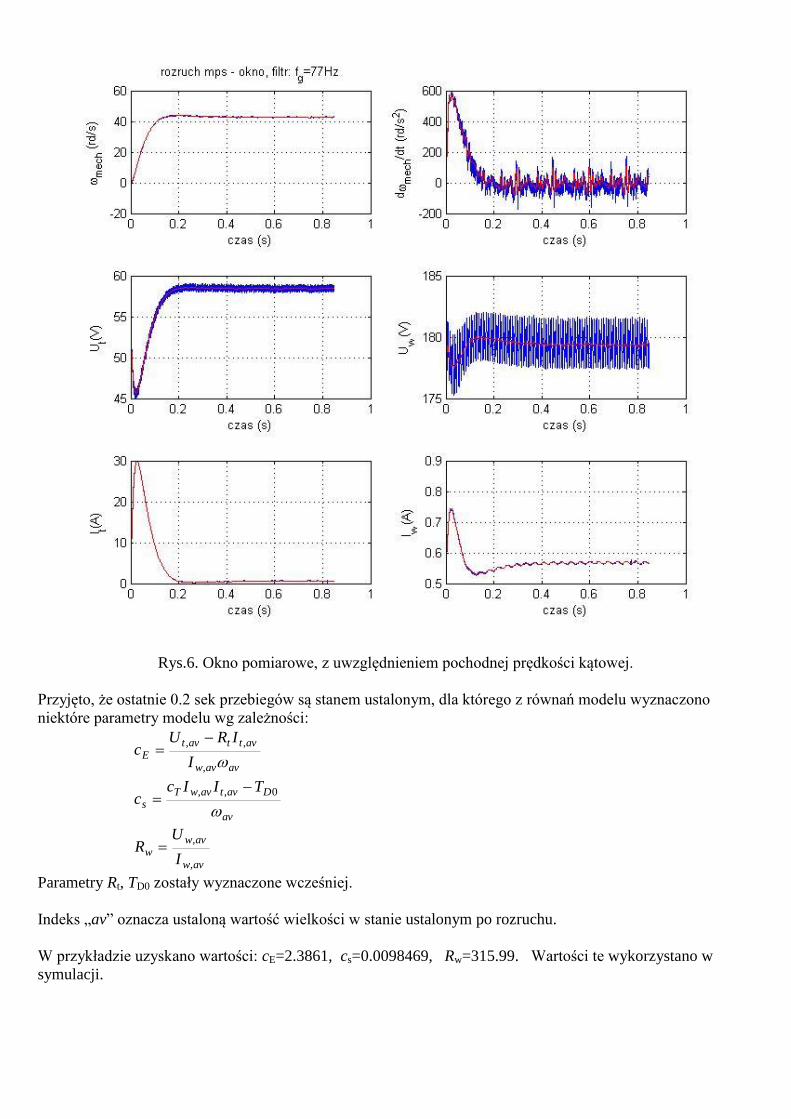
Rys.5. Zarejestrowane przebiegi w czasie rozruchu, po skalowaniu.
W dalszych obliczeniach wyznaczono pochodną prędkości kątowej silnika, zdefiniowano okno pomiarowe oraz
wykonano filtrowanie przebiegów. Poniższy rysunek przedstawia otrzymany wynik, włącznie z funkcją
pochodnej czasowej prędkości kątowej silnika.
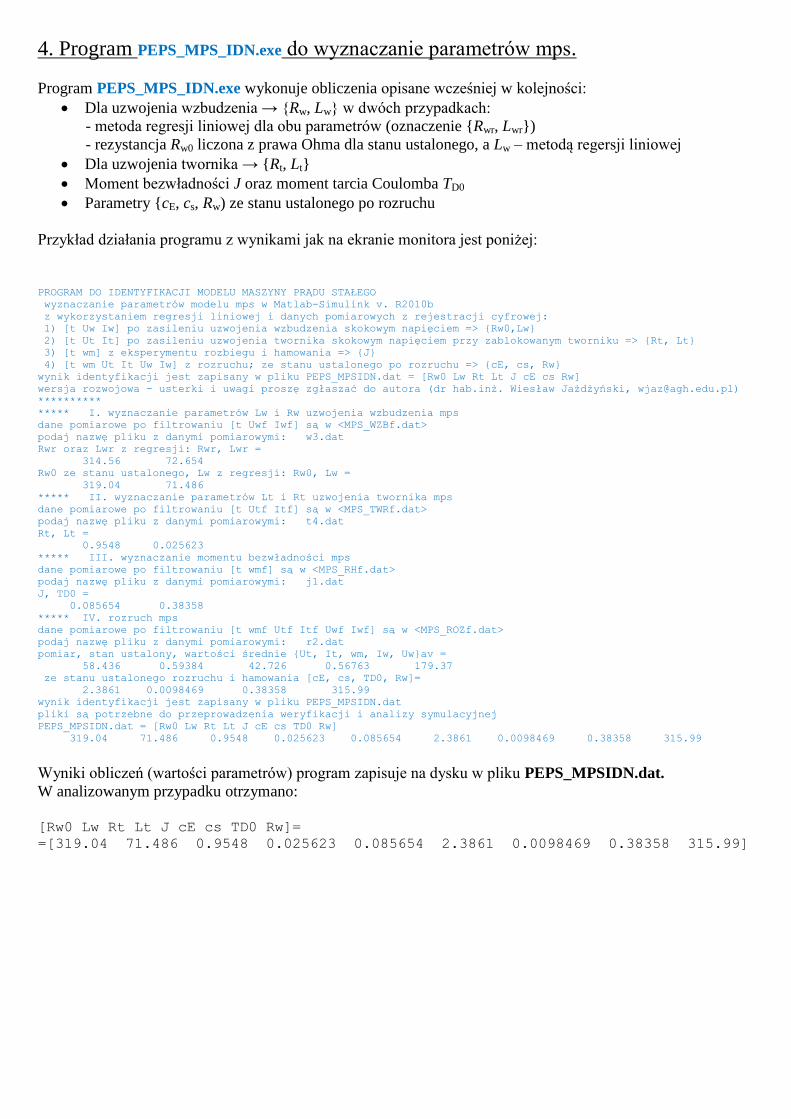
Rys.6. Okno pomiarowe, z uwzględnieniem pochodnej prędkości kątowej.
Przyjęto, że ostatnie 0.2 sek przebiegów są stanem ustalonym, dla którego z równań modelu wyznaczono
niektóre parametry modelu wg zależności:
avavw
avttavtE
I
IRUc
,
,,
av
DavtavwTs
TIIcc
0,,
avw
avww
I
UR
,
,
Parametry Rt, TD0 zostały wyznaczone wcześniej.
Indeks „av” oznacza ustaloną wartość wielkości w stanie ustalonym po rozruchu.
W przykładzie uzyskano wartości: cE=2.3861, cs=0.0098469, Rw=315.99. Wartości te wykorzystano w
symulacji.
4. Program PEPS_MPS_IDN.exe do wyznaczanie parametrów mps.
Program PEPS_MPS_IDN.exe wykonuje obliczenia opisane wcześniej w kolejności:
Dla uzwojenia wzbudzenia → Rw, Lw w dwóch przypadkach:
- metoda regresji liniowej dla obu parametrów (oznaczenie Rwr, Lwr)
- rezystancja Rw0 liczona z prawa Ohma dla stanu ustalonego, a Lw – metodą regersji liniowej
Dla uzwojenia twornika → Rt, Lt
Moment bezwładności J oraz moment tarcia Coulomba TD0
Parametry cE, cs, Rw) ze stanu ustalonego po rozruchu
Przykład działania programu z wynikami jak na ekranie monitora jest poniżej:
PROGRAM DO IDENTYFIKACJI MODELU MASZYNY PRĄDU STAŁEGO
wyznaczanie parametrów modelu mps w Matlab-Simulink v. R2010b
z wykorzystaniem regresji liniowej i danych pomiarowych z rejestracji cyfrowej:
1) [t Uw Iw] po zasileniu uzwojenia wzbudzenia skokowym napięciem => Rw0,Lw
2) [t Ut It] po zasileniu uzwojenia twornika skokowym napięciem przy zablokowanym tworniku => Rt, Lt
3) [t wm] z eksperymentu rozbiegu i hamowania => J
4) [t wm Ut It Uw Iw] z rozruchu; ze stanu ustalonego po rozruchu => cE, cs, Rw
wynik identyfikacji jest zapisany w pliku PEPS_MPSIDN.dat = [Rw0 Lw Rt Lt J cE cs Rw]
wersja rozwojowa - usterki i uwagi proszę zgłaszać do autora (dr hab.inż. Wiesław Jażdżyński, [email protected])
**********
***** I. wyznaczanie parametrów Lw i Rw uzwojenia wzbudzenia mps
dane pomiarowe po filtrowaniu [t Uwf Iwf] są w <MPS_WZBf.dat>
podaj nazwę pliku z danymi pomiarowymi: w3.dat
Rwr oraz Lwr z regresji: Rwr, Lwr =
314.56 72.654
Rw0 ze stanu ustalonego, Lw z regresji: Rw0, Lw =
319.04 71.486
***** II. wyznaczanie parametrów Lt i Rt uzwojenia twornika mps
dane pomiarowe po filtrowaniu [t Utf Itf] są w <MPS_TWRf.dat>
podaj nazwę pliku z danymi pomiarowymi: t4.dat
Rt, Lt =
0.9548 0.025623
***** III. wyznaczanie momentu bezwładności mps
dane pomiarowe po filtrowaniu [t wmf] są w <MPS_RHf.dat>
podaj nazwę pliku z danymi pomiarowymi: j1.dat
J, TD0 =
0.085654 0.38358
***** IV. rozruch mps
dane pomiarowe po filtrowaniu [t wmf Utf Itf Uwf Iwf] są w <MPS_ROZf.dat>
podaj nazwę pliku z danymi pomiarowymi: r2.dat
pomiar, stan ustalony, wartości średnie Ut, It, wm, Iw, Uwav =
58.436 0.59384 42.726 0.56763 179.37
ze stanu ustalonego rozruchu i hamowania [cE, cs, TD0, Rw]=
2.3861 0.0098469 0.38358 315.99
wynik identyfikacji jest zapisany w pliku PEPS_MPSIDN.dat
pliki są potrzebne do przeprowadzenia weryfikacji i analizy symulacyjnej
PEPS_MPSIDN.dat = [Rw0 Lw Rt Lt J cE cs TD0 Rw]
319.04 71.486 0.9548 0.025623 0.085654 2.3861 0.0098469 0.38358 315.99
Wyniki obliczeń (wartości parametrów) program zapisuje na dysku w pliku PEPS_MPSIDN.dat.
W analizowanym przypadku otrzymano:
[Rw0 Lw Rt Lt J cE cs TD0 Rw]=
=[319.04 71.486 0.9548 0.025623 0.085654 2.3861 0.0098469 0.38358 315.99]

Weryfikacja modelu m.p.s. w Matlab-Simulink (R2010b)
Schemat modelu:
Blok parametrów maszyny:
Model w pliku *.mdl jest wywoływany przez oddzielny m-plik, w którym odczytuje się z dysku wartości
parametrów modelu zapisane wcześniej w pliku PEPS_MPSIDN.dat przez program PEPS_MPS_IDN.exe.
Dodatkowo w tym m-pliku:
1. Zadana jest wartość początkowa prądu wzbudzenia Iw(t=0):
w
avww
R
UtI
,)0(
2. Zdefiniowana jest macierz, której kolumnami są zarejestrowane w czasie rozruchu wielkości
twt IIUt
Macierz ta, w przykładzie o nazwie TUtIfwIt, jest podana jako wejściowa w bloku „From
workspace” Simulinka, przy czym:
Napięcie Ut zasila uzwojenie twornika W przykładzie prąd Iw nie jest aktywny.
Funkcje prędkości kątowej silnika ω oraz prądu twornika It są wykorzystane do weryfikacji
modelu polegającej w przykładzie na porównaniu tych wielkości z analogicznymi
symulacyjnymi.
3. Wyznaczona jest wartość Uf0= Uw,av napięcia zasilającego uzwojenie wirnika jako wartość ustalona
po rozruchu.
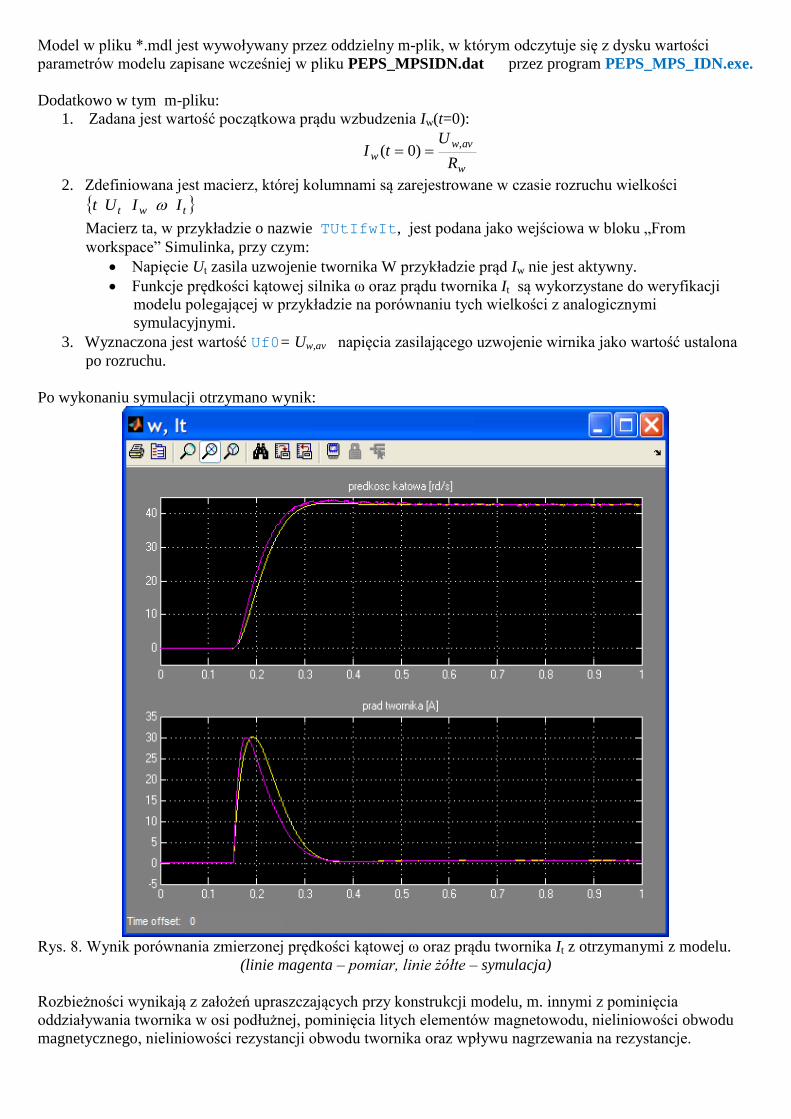
Po wykonaniu symulacji otrzymano wynik:
Rys. 8. Wynik porównania zmierzonej prędkości kątowej ω oraz prądu twornika It z otrzymanymi z modelu.
(linie magenta – pomiar, linie żółte – symulacja)
Rozbieżności wynikają z założeń upraszczających przy konstrukcji modelu, m. innymi z pominięcia
oddziaływania twornika w osi podłużnej, pominięcia litych elementów magnetowodu, nieliniowości obwodu
magnetycznego, nieliniowości rezystancji obwodu twornika oraz wpływu nagrzewania na rezystancje.

Propozycje tematów symulacji:
1. praca maszyny dla różnych rodzajów zasilania:
a) stałe
b) z Hoppera
c) z mostka Graetza
d) ze sterowanego mostka tyrystorowego
2. obciążenie skokowe dla różnych relacji stałych czasowych elektrycznej i el-mechanicznej
3. rozruch ze sprzężeniem:
a) napięciowym
b) b)prędkościowym

Część II. Model maszyny z magnesami trwałymi (PMDC) dla stanu
ustalonego.
Zakres ćwiczenia:
1. Pomiary do wyznaczenia współczynników równań stanu ustalonego maszyny prądu stałego z
magnesami trwałymi napędu pomocniczego (dyferencjał) samochodu (BMW, Jaguar)
2. Wyznaczenie obliczeniowe charakterystyk mechanicznych silnika i porównanie z charakterystykami
odniesienia producenta.
Zakres pomiarów:
1. Wyznaczanie parametrów równania napięciowego uzwojenia twornika.
2. Wyznaczanie parametrów momentu dyssypacji reprezentującego tarcie Coulomba i wiskotyczne.
Stanowisko pomiarowe:
Równania ruchu silnika badanego w stanie ustalonym:
tttt UEIR tE
mtD TIT
gdzie:
Rt – rezystancja uzwojenia twornika
Ψ – parametr reprezentujący pole główne maszyny (wzbudzenie)
TD – moment dyssypacji reprezentujący tarcie Coulomba TD0 oraz wiskotyczne csω , czyli:
sDD cTT 0
Tm – zewnętrzny moment obciążenia
Algorytm postępowania w celu wyznaczenia charakterystyk mechanicznych:
1. Uruchomiony jest silnik napędowy do ok. 2000 obr/min, a zasilacz odłączony. Parametr Ψ jest
wyznaczany z zależności:
tU
gdzie 30/**50 U
2. Mierzona jest rezystancja Rt uzwojenia wirnika metodą techniczną przy pomocy zasilacza dla
zablokowanego wirnika. Prąd zasilacza Iz, max = 20A. W obliczeniach można uwzględnić spadek
napięcia na szczotkach i komutatorze – dla większych prądów ΔUsz=~0.5V.
A
V V
M 1~
Ez
Et
Ut
It
Uω
silnik
badany
tachoprądnica
silnik
napędowy
zasilacz
3. Silnik badany jest zasilony z zasilacza przy odłączonym silniku napędowym. Mierzone są prąd twornika
It oraz napięcie tachoprądnicy Uω dla dwóch różnych napięć twornika Ut≤12V. Odpowiadające
prędkości kątowe ω są wyznaczane z zależności:
30/**50 U
Z równania:
tsD IcT 0
wyznaczane są parametry TD0, cs poprzez rozwiązanie układu dwóch niejednorodnych równań
liniowych.
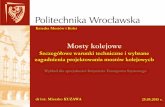
4. Charakterystyki mechaniczne są wyznaczane dla napięcia znamionowego silnika badanego Ut=12V
przy założeniu, że zmienną niezależną jest prąd twornika It. Wtedy kolejno:
ttt IRU
sDtm cTIT 0
5. Charakterystyki są wyznaczane w postaci funkcji:
)( mt TfI oraz )( mTfn , gdzie: /*30n ,
a następnie umieszczone na poniższym rysunku zawierającym obszar dopuszczalnych charakterystyk
dla tego silnika. Linie kropkowane na rysunku dotyczą przykładowych pomiarów i obliczeń
wykonanych wg instrukcji.
Należy ocenić wynik porównania.
UWAGA: Zastosowano podejście uproszczone. W podejściu dokładniejszym należy uwzględnić
np. rezystancję przewodów (wobec Rt<0.5 Ohm), spadek napięcia na szczotkach (wobec UtN=12V),
oraz fakt, że bieg jałowy dotyczy zespołu maszyn.












![WPŁYW PRZEMIENNEGO NAPIĘCIA WZBUDZENIA NA ...Paszek W.: Dynamika maszyn elektrycznych prądu przemiennego. Wydawnictwo Helion, Gliwice 1998r. [3]. Zalas P.: Analiza procesu synchronizacji](https://static.fdocuments.pl/doc/165x107/610dc490fbb11c7c792bcc31/wpyw-przemiennego-napicia-wzbudzenia-na-paszek-w-dynamika-maszyn-elektrycznych.jpg)


