Budowa okrętu i wyposażenie pokładowe IV sem wykł · PDF fileRysunek 1 pokazuje siły i...
54
Projekt wspólfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Spolecznego Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie” Akademia Morska w Szczecinie, ul. Waly Chrobrego 1-2, 70-500 Szczecin 1 Materialy dydaktyczne Budowa okrętu i wyposażenie pokladowe Semestr IV Wyklady
Transcript of Budowa okrętu i wyposażenie pokładowe IV sem wykł · PDF fileRysunek 1 pokazuje siły i...

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
1
Materiały dydaktyczne
Budowa okrętu i wyposażenie pokładowe
Semestr IV
Wykłady

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
2
Temat 1 (1 godzina): Pływalność statku
Jeżeli woda znajduje się w spoczynku, to ciśnienie hydrostatyczne w danym punkcie pod
powierzchnią wody zależy od głębokości, na jakiej ten punkt się znajduje. Zależność ta wyraża się
wzorem [5]:
p = pA + ρ ⋅ g ⋅ h = pA + γ ⋅ h (1)
gdzie:
p − ciśnienie hydrostatyczne [Pa],
pA − ciśnienie atmosferyczne [Pa],
ρ − gęstość wody zaburtowej (masa właściwa) [kg/m3],
g − przyspieszenie ziemskie [m/s2],
h − głębokość, na jakiej rozpatrywane jest ciśnienie [m],
γ − ciężar właściwy wody zaburtowej [N/m3]; γ = ρ ⋅ g.
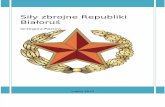
Ciśnienie wyrażone wzorem (1) działa prostopadle na zanurzoną część poszycia statku. Na rysunku 1
pokazany jest rozkład ciśnienia hydrostatycznego w poprzecznym przekroju statku w rejonie owręża.
[5]
Rys. 1. Rozkład ciśnienia hydrostatycznego na poszycie statku [5]
Pływalnością statku nawodnego nazywamy jego zdolność do utrzymywania się na
powierzchni wody. Pływalność jest zapewniona, jeżeli ciężar statku zrównoważony jest siłami
wytwarzanymi przez wodę. Ciężar statku wynika z istnienia grawitacji (tzw. siła masowa). Źródłem sił
wytwarzanych przez wodę (tzw. siły powierzchniowe) jest ciśnienie działające na powierzchnię
pA
pA

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
3
poszycia kadłuba znajdującą się pod wodą. Siły wytwarzane przez wodę klasyfikuje się w podziale na
dwie grupy:
1. Siły hydrostatyczne, wynikające z ciśnienia hydrostatycznego działającego na poszycie statku
pływającego swobodnie na nieruchomej powierzchni wody, z zerową prędkością postępową −
rysunek 1.
2. Siły hydrodynamiczne, wynikające z zaburzenia ciśnienia hydrostatycznego. Zaburzenie to
może być spowodowane ruchem statku lub wody (np. falowaniem).
W pewnym uproszczeniu, zakładając między innymi brak falowania, warunek pływalności statku
można wyrazić następującym wzorem [5]:
2
2vACVggmW ZC ⋅⋅⋅+⋅⋅=⋅= ρρ (2)
gdzie:
W − ciężar statku [N],
m − masa statku (wyporność) [kg],
g − przyspieszenie ziemskie [m/s2],
ρ − gęstość wody zaburtowej (masa właściwa) [kg/m3],
VC − całkowita objętość podwodnej części kadłuba [m3],
C − współczynnik zależny od kształtu kadłuba [−],
AZ − pole powierzchni poszycia podwodnej części kadłuba (tzw. pole powierzchni zwilżonej)
[m2],
v − prędkość postępowa statku względem wody [m/s].
Pierwszy składnik prawej strony równania (2) związany jest z ciśnieniem o charakterze
hydrostatycznym, natomiast drugi związany jest z o charakterze hydrodynamicznym.
Na statek w warunkach eksploatacji mogą działać w kierunku pionowym inne siły, nie ujęte w
równaniu (2). Można wśród nich wyróżnić siły skupione, wynikające na przykład z kontaktu statku z
gruntem. W takim przypadku do prawej strony równania (2) należy dopisać dodatkowy element
symbolizujący siłę skupioną [2]:
Rv
ACVggmW ZC +⋅⋅⋅+⋅⋅=⋅=2
2
ρρ (3)
gdzie:
R − siła skupiona [N]. [5]

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
4
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
5
Temat 2-3 (3 godziny): Początkowa wysokość metacentryczna.Stateczność początkowa.
Jeżeli statek pływa bez przechyłu, to podwodna część kadłuba jest symetryczna. Wtedy środek
wyporu Bo, jako geometryczny środek podwodzia leży na płaszczyźnie symetrii statku. Jeżeli pod
wpływem zewnętrznego momentu przechylającego statek przechyli się o pewien kąt, to po przechyle
podwodna część kadłuba statku nie jest symetryczna. Wtedy środek wyporu odsuwa się od
płaszczyzny symetrii w stronę burty bardziej zanurzonej − Bϕ. [5]
Rys. 1. Przemieszczanie się środka wyporu wskutek przechyłu statku:
K − ślad linii stępki (punkt odniesienia), Bo − środek wyporu statku bez przechyłu,
Bϕ − środek wyporu statku przechylonego o kąt ϕ. [5]
Środek wyporu, przemieszczając się w miarę zwiększania się kąta przechyłu statku od punktu Bo
do punktu Bϕ, zakreśla pewną krzywą. Krzywa ta nazywa się krzywą środków wyporu. Jeżeli
rozpatrzymy wszystkie możliwe kąty przechyłu od 0 do 360 stopni, to krzywa środków wyporu jest
krzywą zamkniętą (rys. 1) Można założyć, że w zakresie małych kątów przechyłu rzeczywisty
przebieg krzywej środków wyporu może być zastąpiony łukiem okręgu. Ten okrąg zastępujący
rzeczywisty przebieg krzywej środków wyporu w zakresie małych kątów przechyłu może być opisany
w ten sposób, że podane zostaną: położenie jego środka i promień. Środek okręgu leży na płaszczyźnie
symetrii statku i nazywa się punktem metacentrycznym M (metacentrum) (rys. 2). Promień okręgu
nazywa się promieniem metacentrycznym. [5]
ϕ
Bϕ

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
6
W zakresie małych kątów przechyłu przyjmuje się, że punkt metacentryczny M nie zmienia
swojego położenia i wtedy ramie prostujące GZ (czyli odległość pomiędzy wypadkowymi wektorami
ciężkości i wyporu) jest równe:
GZ = GM·sinϕ,. (1),
gdzie:
ϕ - kąt przechyłu bocznego statku,
GM – początkowa wysokość meta centryczna.
Z rysunku 2 wynika, że początkowa poprzeczna wysokości metacentryczna GM może być
wyznaczona z zależności:
GM = KM – KG. (2),
gdzie:
KM – wzniesienie metacentrum M czyli pionowa odległość pomiędzy punktem K i M,
KG – wzniesienie środka ciężkości, czyli pionowa odległość pomiędzy punktem K i G.
Rys. 1. Punkt metacentryczny M, ramię prostujące GZ i wysokość metacentrryczna GM
Wartość parametru KM zależy od kształtu podwodzia statku i KM odczytuje się z dokumentacji
statku. Wartość wzniesienia środka ciężkości statku KG zależy od rozmieszczenia ciężarów na statku.
Zachowanie statku w zakresie małych kątów przechyłu wielu autorów określa mianem tzw.
stateczności początkowej. W takim przypadku parametrem opisującym to zachowanie (czyli
stateczność początkową) jest początkowa poprzeczna wysokość metacentryczna.
Bϕ ϕ

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
7
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
8
Temat 4,5,6 (6 godzin): Moment wychylający i moment prostujący. Stateczność przy dużych
kątach przechyłu. Krzywe ramion stateczności statycznej, pantokanery.
Rozpatrzmy przypadek, gdy na statek pływający swobodnie na spokojnej powierzchni wody działa
statycznie moment przechylający w płaszczyźnie poprzecznej. W takim przypadku na statek działają
trzy czynniki [5]:
a) siła ciężkości W, przyłożona w środku ciężkości statku G, działająca w dół prostopadle do
powierzchni wody;
b) siła wyporu D, przyłożona w środku wyporu Bϕ, działająca do góry prostopadle do
powierzchni wody;
c) zewnętrzny moment przechylający MH, powodujący obrót statku w płaszczyźnie poprzecznej.
Dodatni znak momentu MH przyjmuje się, jeżeli zwrot momentu jest zgodny z ruchem
wskazówek zegara, patrząc od rufy statku. Pod wpływem tego momentu statek przechyla się
zwiększając zanurzenie prawej burty [5].
Zewnętrzny moment przechylający MH powoduje przechył statku o pewien kąt. Wskutek tego
podwodna część kadłuba statku przechylonego nie jest symetryczna. W związku z tym środek wyporu,
jako geometryczny środek podwodzia, odsuwa się od płaszczyzny symetrii w stronę burty bardziej
zanurzonej [5]. Załóżmy, że:
− przechył statku nie spowodował przemieszczenia się na nim żadnych ciężarów składających
się na stan załadowania;
− statek załadowany jest symetrycznie − środek ciężkości statku znajduje się na płaszczyźnie
symetrii.
Powyższe założenia nie zawsze dokładnie opisują rzeczywistość, zwłaszcza dla dużych kątów
przechyłu statku, awarii polegającej na przesunięciu się ładunku itp. Niemniej jednak, w przypadku
oceny stateczności statku przed wyjściem w morze przyjmujemy założenie: środek ciężkości statku
przechylonego pozostaje na płaszczyźnie symetrii.
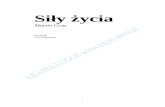
Rysunek 1 pokazuje siły i momenty działające w omawianym przypadku na statek przechylony.
Wektory siły ciężkości W i siły wyporu D nie leżą na jednej prostej. Są one równe co do wartości,
równoległe do siebie i przeciwnie skierowane. Tworzą parę sił, będącą momentem działającym na
statek w płaszczyźnie poprzecznej, przeciwnie do kierunku momentu przechylającego. Ze względu na
kierunek działania omawiana para sił nazywa się momentem prostującym. Wytworzenie
odpowiedniego momentu prostującego jest warunkiem koniecznym do tego, aby statek, na który

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
9
działa zewnętrzny moment przechylający (statyczny) mógł pozostawać w położeniu równowagi,
pływając z określonym kątem przechyłu ϕ. [5]
Rys. 1. Siły i momenty działające na statek przechylony:
G − środek ciężkości, Bϕ − środek wyporu statku przechylonego o kąt ϕ, Z − punkt wynikający z rzutowania
środka ciężkości statku na linię działania siły wyporu, W − siła ciężkości, D − siła wyporu, MH − zewnętrzny
moment przechylający o charakterze statycznym, ϕ − kąt przechyłu, K − punkt odniesienia (ślad linii stępki),
lK − odległość linii działania siły wyporu od punktu odniesienia (ramię stateczności kształtu), lC − odległość linii
działania siły ciężkości od punktu odniesienia (ramię stateczności ciężaru). [5]
Moment prostujący może być obliczony zgodnie ze wzorem (1) [5]:
MST = D ⋅ GZ (1)
gdzie:
MST − moment prostujący,
D − wypór statku (równy ciężarowi statku),
GZ – ramię prostujące czyliodległość między linią działania siły wyporu a linią działania siły
ciężkości, dla danego kąta przechyłu (ramię momentu prostującego) [m].
Z zasady równowagi sił i momentów wynika następujący wniosek: statek pod wpływem
zewnętrznego momentu przechylającego o charakterze statycznym przyjmie taki kąt przechyłu,
przy którym moment przechylający jest zrównoważony momentem prostującym.
lC
lK
DPP
P S
Bϕ
ZG
W
K
MH
ϕ Bϕ

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
10
Im większy jest moment prostujący, tym większa jest zdolność statku do utrzymania określonego
położenia równowagi, a także zdolność do powrotu do tego położenia, jeżeli statek zostanie z niego
wytrącony. Wartość momentu prostującego decyduje o stateczności statku. Wielkością stosowaną do
określania i oceny stateczności statku jest ramię momentu prostującego − ramię prostujące.
Ramieniem prostującym GZ nazywamy odległość między linią działania siły wyporu a linią
działania siły ciężkości.
Ramię prostujące zależy od:
a) kształtu kadłuba − przede wszystkim od stosunku szerokości bocznej statku do zanurzenia, a
także od wolnej burty;
b) stanu załadowania statku, czyli:
− ciężaru statku wpływającego na jego zanurzenie,
− wzniesienia środka ciężkości;
c) kąta przechyłu statku.
Zgodnie z oznaczeniami przyjętymi na rysunku 1, wzór na ramię prostujące ma następującą postać:
GZ = lK – lC (2)
gdzie:
GZ − ramię prostujące [m],
lK − ramię stateczności kształtu [m] (rys. 2),
lC − ramię stateczności ciężaru [m].
Ramię stateczności kształtu lK to odległość między linią działania siły wyporu a punktem
odniesienia (rys. 2). Jego wartość zależy od kształtu kadłuba, zanurzenia i kąta przechyłu statku.
Ramię stateczności kształtu może być obliczone w trakcie projektowania statku. Wyniki obliczeń
podane są w formie rysunku lub tabeli. Element dokumentacji statku zawierający wyniki obliczeń
ramion stateczności kształtu nazywa się pantokarenami.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
11
Rys. 2. Opis położenia linii działania siły wyporu za pomocą kąta przechyłu i ramienia stateczności kształtu [5]
Ramię stateczności ciężaru lC to odległość między linią działania siły ciężkości a punktem
odniesienia. Jego wartość zależy od wzniesienia środka ciężkości KG i od kąta przechyłu statku.
Krzywa ramion prostuj ących to funkcja przedstawiająca zależność ramienia prostującego
od kąta przechyłu dla danego stanu załadowania statku (rys. 3).
Wykres ramion prostujących nazywany jest przez praktyków krzywą Reeda. Krzywa ramion
prostujących zawiera następującą informację: jak daleko linia działania siły wyporu odległa jest od
linii działania siły ciężkości w zależności od kąta przechyłu statku.[5]
Rys. 3. Krzywa ramion prostujących [5]
lK
lKD
PP
P S
K
MH
ϕ [ ]ο
GZ [m]
10 20 30 40 50 60 70
ϕ Bϕ
ϕ

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
12
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
13
Temat 7 (2 godziny): Stateczność dynamiczna, określenie kąta przechyłu dynamicznego.
Do oceny stateczności statku zakłada się, że pod wpływem dowolnego ramienia przechylającego
statek uzyskuje taki kąt przechyłu, przy którym „praca” ramienia przechylającego zrównoważona jest
przez „pracę” ramienia prostującego. „Praca” ramienia prostującego ld, wykonana przy przechyle
statku od zera do danego kąta przechyłu ϕ, wyrażona jest wzorem (1). „Praca” ta nazywa się
ramieniem stateczności dynamicznej i oblicza się wg wzoru 1 [5]:
∫ ⋅=ϕ
ϕ0
dGZl d (1)
Interpretacją geometryczną pracy ramienia prostującego jest pole pod wykresem ramion prostujących
(rys. 1).
Rys. 1. Pole powierzchni pod krzywą ramion prostujących „praca” ramienia prostującego) [5]
Krzywa ramion prostujących GZ zależy dla danego kształtu kadłuba od stanu załadowania statku.
Dlatego „praca” ramienia prostującego wykonana w danym przedziale kątów przechyłu, jako całka z
krzywej ramion prostujących, zależy także od stanu załadowania statku.
W eksploatacji statku przyjmuje się, że jeżeli w celu przechylenia statku w danym przedziale
kątów należy wykonać odpowiednio dużą pracę, to stateczność statku w danym stanie załadowania
jest wystarczająca. Z tego względu „praca” ramienia prostującego jest bardzo ważną wielkością
opisującą bezpieczeństwo statecznościowe statku i jest stosowana jako miernik stateczności.
ϕ

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
14
Istnieje związek między krzywą ramion prostujących a krzywą stateczności dynamicznej. Wynika
on z tego, że krzywa stateczności dynamicznej jest krzywą całkową dla krzywej ramion prostujących.
Związek, o który chodzi można ująć w następujących stwierdzeniach:
1. Kąt, przy którym występuje maksymalna wartość ramienia prostującego jest równy kątowi,
przy którym występuje punkt przegięcia krzywej stateczności dynamicznej.
2. Kąt zakresu krzywej ramion prostujących jest równy kątowi, dla którego występuje
maksymalna wartość ramienia stateczności dynamicznej.
Związek ten zilustrowany jest na rysunku 2, przedstawiającym krzywą ramion stateczności
dynamicznej, gdzie dodatkowo naniesiono odpowiadającą jej krzywą ramion prostujących.
Z wykresu ramion stateczności dynamicznej można odczytać, jaką „prac ę” wykonuje rami ę
prostujące przy przechyle statku od zera do danego kąta przechyłu.
Rys. 2. Wykres ramienia prostującego i ramienia statyczności dynamicznej [5]
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.
ϕ
[o]
ld [m rad]⋅
10 20 30 40 50 60 70
ramię statecznościdynamicznej
ramięprostujące

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
15
Temat 8 (2 godziny): Kryteria statecznościowe, wpływ swobodnych powierzchni cieczy w
zbiornikach na stateczność.
Stateczność poprzeczną statku w danym stanie załadowania, przed wyjściem w morze, uznaje się
za wystarczającą, jeżeli spełnione są kryteria oceny stateczności wynikające ze standardów
stateczności.
Kryteria oceny stateczności sformułowane są zwykle w formie nierówności [5]:
(rozpatrywana wielkość) ≥ (wartość graniczna),
lub
(rozpatrywana wielkość) ≤ (wartość graniczna).
Jeżeli dana nierówność jest spełniona, to stateczność statku z punktu widzenia rozpatrywanej
wielkości jest uznana za wystarczającą.
Kryteria oceny służą do oceny projektu statku (z punktu widzenia stateczności) jeszcze przed jego
zbudowaniem, jak również używane są do oceny stateczności przed wyjściem w morze.
Standardy i kryteria oceny stateczności zawarte są w rozdziale 3 Kodeksu stateczności statków.
Zostały ponumerowane tylko w celu ich uporządkowania i łatwiejszego omówienia. Wielkości
wymienione w standardach należy obliczać biorąc pod uwagę wzniesienie środka ciężkości statku nad
PP skorygowane o poprawkę uwzględniającą wpływ swobodnej powierzchni cieczy w niecałkowicie
zapełnionych zbiornikach.
1. Pole powierzchni zawarte pod krzywą ramion prostujących musi być:
− nie mniejsze niż 0,055 m⋅rad licząc od 0° do 30° przechyłu;
− nie mniejsze niż 0,090 m⋅rad licząc od 0° do 40° przechyłu lub do kąta zalewania, jeżeli
kąt zalewania jest mniejszy niż 40°;
− nie mniejsze niż 0,030 m⋅rad licząc od 30° do 40° przechyłu, lub od 30° do kąta
zalewania, jeżeli kąt zalewania jest mniejszy niż 40°.
2. Ramię prostujące musi wynosić co najmniej 0,2 m przy kącie przechyłu równym lub
większym niż 30°.
3. Maksymalne ramię prostujące musi wystąpić przy kącie przechyłu nie mniejszym niż 25°.
Zaleca się, aby ten kąt przechyłu przekroczył 30°.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
16
4. Początkowa wysokość metacentryczna musi być nie mniejsza niż 0,15 m.
5. Dodatkowo dla statków pasażerskich, kąt przechyłu statycznego, spowodowany
zgromadzeniem się pasażerów przy jednej burcie, nie może przekroczyć 10°.
6. Dodatkowo dla statków pasażerskich, kąt przechyłu statycznego, spowodowany cyrkulacją,
nie może przekroczyć 10°.
Ocenę stateczności statku prowadzi się w oparciu o różne parametry statecznościowe charakteryzujące
stan załadowania. Jednym z tych parametrów jest ramię prostujące, które zależy m.in. od położenia
środka ciężkości statku. Położenie środka ciężkości statku oblicza się w oparciu o rozkład ciężarów
wykorzystując moment statyczny ciężaru, zakładając m.in. że statek jest bryłą sztywną. Takie
podejście nie pozwala na uwzględnienie w obliczeniach wszystkich elementów statku, ponieważ
niektóre elementy statku zmieniają swój środek ciężkości w czasie ruchów kadłuba, tj. ciecze w
częściowo zapełnionych zbiornikach lub ciężary podwieszone. Aby uwzględnić wpływ tych zjawisk
na stateczność statku oblicza się odpowiednie poprawki, np. poprawkę wzniesienia środka ciężkości
uwzględniającą swobodną powierzchnię cieczy.
Powierzchnia cieczy zawsze dąży do tego, aby przyjąć położenie poziome. Jeżeli statek się przechyla,
to ciecz w niecałkowicie zapełnionych zbiornikach przemieszcza się. Powierzchnia cieczy, mająca
możliwość przemieszczania się przy przechyle statku, nazywa się swobodną powierzchnią cieczy.
Jeżeli przemieszcza się ciecz w zbiorniku, to przemieszcza się także środek ciężkości tej cieczy, a co
za tym idzie, przemieszcza się środek ciężkości statku. Zjawisko to zobrazowane jest na rysunku 1.
Symbolem g oznaczono położenie środka ciężkości cieczy w zbiorniku. Symbolem G oznaczono
położenie środka ciężkości statku. Indeks „o” oznacza położenie tych punktów przed przechyłem
statku. Indeks „1” oznacza położenie tych punktów po przechyle statku.
a) b)
Rys. 1. Przemieszczanie się cieczy w niecałkowicie zapełnionym zbiorniku:
a) statek bez przechyłu, b) statek z przechyłem [5]
GoG1
K K
go g1
Linia działaniasiły ciężkości
W W

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
17
Wraz z przechylaniem się statku następuje przemieszczenie środka ciężkości z punktu G0 do punktu
G1 i wraz z tym zmniejszenie ramienia prostującego (rys. 2).
Rys. 2. Linia działania siły ciężkości i siły wyporu po przemieszczeniu się cieczy [5]
Pionową odległość między faktycznym środkiem ciężkości statku bez przechyłu Go a pozornym
środkiem ciężkości G, leżącym na płaszczyźnie symetrii i na linii działania siły ciężkości, nazywamy
poprawką na swobodne powierzchnie cieczy.
Poprawka na swobodne powierzchnie cieczy, to odległość, o jaką należy zwiększyć wzniesienie
środka ciężkości statku (Go) wynikające z rozkładu masy, aby uwzględnić w obliczeniach
statecznościowych przemieszanie się cieczy w niecałkowicie zapełnionych zbiornikach, spowodowane
przechyłami statku.
Na statku w warunkach eksploatacji zawsze znajdują się zbiorniki, które nie są zapełnione całkowicie.
Są to zbiorniki zawierające paliwo, oleje, wodę, ścieki itp. Ciężary cieczy w tych zbiornikach mogą
być znaczące w stosunku do ciężaru statku. Przemieszczanie się środka ciężkości statku przy
przechyle, spowodowane istnieniem swobodnych powierzchni cieczy, musi być uwzględnione w
obliczeniach statecznościowych.
D
Go
G1
G
∆GM
K
MH
lC
lC
g1
lK
go
o
Bϕ

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
18
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
19
Temat 9 (2 godziny): Stateczność wzdłużna, przegłębienie.
Położenie równowagi statku to takie położenie, w którym statek może przez czas nieograniczony
spoczywać względem otaczającej go wody, zakładając, że nie działają na niego oprócz sił ciężkości i
wyporu hydrostatycznego żadne dodatkowe siły lub momenty zewnętrzne. Utrzymanie statku w
odpowiednim położeniu równowagi jest jednym z kluczowych zagadnień w jego eksploatacji. Położenie
równowagi wpływa na możliwość użytkowania statku jako środka transportu, jego bezpieczeństwo,
efekty ekonomiczne, komfort załogi i pasażerów oraz inne mniej istotne właściwości. Pożądanym
położeniem równowagi przed wyjściem w morze, do którego dąży się w przypadku większości
statków, jest pływanie bez przechyłu, z rufą zanurzoną trochę głębiej niż dziób (najczęściej rzędu
kilkudziesięciu centymetrów).
Jeżeli statek w danym stanie załadowania, opisanym wyporem i współrzędnymi środka ciężkości,
pływa swobodnie na spokojnej powierzchni wody, to:
1. Statek przyjmie takie zanurzenie, dla którego ciężar wypartej wody, wynikający z objętości
podwodzia, jest równy jego ciężarowi,
2. Dla danej objętości podwodzia statek przyjmie takie położenie względem powierzchni wody,
opisane zanurzeniem średnim, kątem przechyłu i przegłębieniem, dla którego środek wyporu,
jako geometryczny środek podwodzia, i środek ciężkości znajdą się na jednej prostej
prostopadłej do powierzchni wody. Wynika to z tego, że suma momentów dwóch równych
co do wartości i przeciwnie skierowanych sił może być równa zero tylko wtedy, gdy linie
działania tych sił pokrywają się.
Powyższe stwierdzenie zobrazowane jest na rysunku 1. Aby uogólnić przypadek przyjęto na
rysunku 1 b, że środek ciężkości statku nie leży na płaszczyźnie symetrii (yG ≠ 0).
Na rysunku 1 symbolami lS i lK oznaczono odległość wspólnej linii działania siły wyporu i siły
ciężkości od punktu odniesienia − odpowiednio w rzucie na płaszczyznę symetrii i na płaszczyznę
owręża. [5]

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
20
a) b)
Rys. 1 Wzajemne położenie środka ciężkości i środka wyporu statku pływającego swobodnie na spokojnej
powierzchni wody: a) rzut na płaszczyznę symetrii, b) rzut na płaszczyznę owręża [5]
Przegłębienie statku jest to różnica między zanurzeniem określonym na pionie dziobowym a
zanurzeniem określonym na pionie rufowym. Obliczane jest zgodnie ze wzorem (1) [5]:
RD TTt −= (1)
gdzie:
t − przegłębienie,
TD − zanurzenie na pionie dziobowym,
TR − zanurzenie na pionie rufowym.
W związku z tym przegłębienie ma znak dodatni, jeżeli dziób statku zanurzony jest bardziej niż rufa.
Przegłębienie statku jest wielkością, do której przywiązuje się znaczną uwagę w eksploatacji
statku. Wpływa ono na takie właściwości statku jak: opory ruchu, zużycie paliwa, manewrowność,
stateczność, stateczność i inne. Na podstawie rysunku 1 można określić zależność między
przegłębieniem a kątem przegłębienia. Zależność ta dana jest wzorem:
PPPP
RD
L
t
L
TT =−=)(tg ψ (2)
gdzie:
ψ − kąt przegłębienia.
⊗

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
21
W praktyce na znacznej liczbie statków stosuje się przegłębienie obliczane odwrotnie, niż to
pokazano wzorem (2). Wynik obliczeń ma wtedy tę samą wartość bezwzględną, ale przeciwny znak.
Dlatego, aby uniknąć nieporozumienia przy obliczaniu przegłębienia na danym statku, korzystaniu z
dokumentacji i przekazywaniu informacji o przegłębieniu, należy zwrócić uwagę na definicję
przegłębienia i wynikające z niej znaki. [5]
Rys. 2. Zanurzenie na pionie dziobowym i rufowym:
TD − zanurzenie na pionie dziobowym, TR − zanurzenie na pionie rufowym, LPP − długość statku między
pionami, ψ − kąt przegłębienia, t − przegłębienie, PP − płaszczyzna podstawowa, PD − pion dziobowy, PR −
pion rufowy, h − grubość stępki, F − środek wodnicy. [5]
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.
LPP
TD
TR
Fψ
ψ
PR PD
hh PP
t

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
22
Temat 10 (2 godziny): Stateczność przy dokowaniu i osadzaniu na mieliźnie.
Podparcie kadłuba statku w czasie dokowania lub na mieliźnie powoduje nacisk kadłuba na
grunt, i co się z tym wiąże zmianę równowagi oraz stateczności statku. Wizualnym efektem podparcia
(np. na mieliźnie) może być wynurzenie części kadłuba.
Nacisk kadłuba na grunt opisuje się za pomocą siły podparcia, zmianę równowagi za pomocą
zanurzenia, przegłębiania i przechyłu, natomiast zmianę stateczności przedstawia się za pomocą
początkowej poprzecznej wysokości metacentrycznej.
W obliczeniach przyjmuje się, że wielkość siły podparcia R jest równa różnicy pomiędzy siłą
wyporu statku podpartego D i ciężarem statku P:
R = D – P (1)
gdzie:
R – siła podparcia (reakcja podłoża na statek),
D – siła wyporu,
P – ciężar statku.
Siłę wyporu statku podpartego oblicza się w oparciu o pomiar zanurzenia statku podpartego,
natomiast ciężar statku oblicza się w oparciu o wypór statku pływającego swobodnie przed
podparciem.
Współrzędne punktu podparcia oblicza się w oparciu o stan równowagi statku przed
podparciem i po podparciu (zanurzenie, przegłębienie i przechył).
Wpływ siły poparcia na stateczność poprzeczną jest taki, jak gdyby ze statku odładowano
ciężar równy sile podparcia R z punktu podparcia (czyli najczęściej punktu leżącego na dolnej
krawędzi stępki). Powoduje to przesunięcie środka ciężkości. Pionowe przesunięcie środka ciężkości
GG’ można opisać następującą zależnością:
�� ′ = �(����)
(2)
gdzie:
GG’ – pionowe przesunięcie środka ciężkości,
z – pionowa współrzędna punktu podparcia,
KG –wzniesienie środka ciężkości statku przed podparciem.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
23
Z drugiej strony następstwem wynurzenie części kadłuba statku jest zmiana wzniesienia
metacentrum poprzecznego. Oba te zjawiska powodują zmianę poprzecznej początkowej wysokości
metacentrycznej do nowej wartości:
GM = KM – (KG+GG’) (3)
gdzie:
GM – wysokość metacentryczna statku podpartego,
KM – wzniesienie metacentrum statku podpartego.
Często, przed przystąpieniem do dokowania, symuluje się zmianę wysokości metacentrycznej
i przeprowadza się ocenę stateczności w czasie dokowania.
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
24
Temat 11 (2 godziny): Niezatapialność. Normy bezpieczeństwa statku.
Niezatapialność to zdolność do utrzymywania się na powierzchni wody przy wystarczającej
stateczności, po uszkodzeniu poszycia zewnętrznego i przedostaniu się wody zaburtowej do wnętrza
statku.
Niezatapialność – dział teorii okrętu zajmujący się warunkami jakie muszą być spełnione, by
statek po uszkodzeniu poszycia zachował pływalność i dostateczną stateczność.
O stopniu niezatapialności decydują głównie dwa wzajemne zależne od siebie czynniki:
1) Zapas pływalności w stanie nieuszkodzonym, czyli objętość szczelnego kadłuba w części
wystającej ponad powierzchnię wody (kadłub szczelny - część kadłuba ograniczona od góry
pokładem grodziowym, do którego sięgają wszystkie grodzie wodoszczelne).
2) Podział wnętrza kadłuba statku na mniejsze przedziały wodoszczelne utrudniający
rozprzestrzenianie się wody zaburtowej wlewającej się do wnętrza statku po uszkodzeniu poszycia
i zmniejszający jej ilość. Zachowanie się statku po awarii zależy głównie od wielkości zalanych
przedziałów (w stosunku do zapasu pływalności) oraz od ich usytuowania i kształtów.
Niezatapialność zajmuje się:
- określeniem położenia i stateczności statku po awarii,
- określaniem liczb grodzi oraz pokładów wodoszczelnych oraz odległości między nimi.
Kryteria niezatapialności PRS.*
Kryteriom niezatapialności określonym na podstawie konwencji SOLAS 1974 podlegają
następujące statki:
- pasażerskie (powyżej 12 pasażerów), - przetwórnie,
- o poziomym systemie ładowania (ro-ro), - holowniki pełnomorskie,
- przeznaczone do pływania w lodach, - pogłębiarki powyżej 60 m. długości.
Według kryteriów statek po awarii:
1) Nie może zanurzyć się w żadnym miejscu głębiej niż do linii granicznej leżącej trzy cale poniżej
linii pokładu grodziowego.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
25
2) Musi mieć dodatnią początkową wysokość metacentryczną obliczoną metodą stałej wyporności
wynoszącą min. dwa cale, GM ≥ 0.05 m.
3) Przechył nie może w żadnym przypadku być większy niż 15° dla niesymetrycznego zalania, a po
zastosowaniu środków przeciwprzechyłowych - 7° dla statków pasażerskich i 12° dla innych
statków.
Ponadto PRS wymaga aby:
- krzywa ramion prostujących miała dodatni zakres do co najmniej 20°przechyłu dla przypadku
niesymetrycznego zalania i 30° dla symetrycznego,
- maksymalne ramię momentu prostującego GZmax wynosiło co najmniej 0.1 m,
- pole pod krzywą ramion stateczności statycznej wynosiło co najmniej 0.0175 m⋅rad.
Każdy statek podlegający przepisom o niezatapialności powinien być wyposażony w dokument
pt. „Informacja o niezatapialności”, w którym będą zawarte:
- obliczenia stateczności i położenia statku w typowych stanach załadowania,
- środki zaradcze stosowane w celu wyrównania przechyłów,
- obowiązujące zamknięcia. [2]
Metody określenia stateczności awaryjnej statku z zalanym przedziałem:
1) Metoda stałej wyporności(utraconej wyporności) - przyjmujemy, że wielkość wyporności po
awarii nie zmienia się, ale zmienia się jej kształt (bo zalany przedział myślowo wyłączamy z
części podwodnej statku.
2) Metoda przyjętego ciężaru (zmiennej wyporności) - wodę w zalanym przedziale traktujemy jako
ciężar przyjęty na statek.
3) Metoda kolejnych przybliżeń (bazująca na metodzie przyjętego ciężaru) – przyjmujemy, że woda
zalewa przedział do poziomu wynikającego z zanurzenia statku przed awarią, ale takie zalanie
przedziału powoduje przegłębienie statku, którego efektem będzie dostanie się do wnętrza statku
dodatkowej wody wynikającej z różnicy między wodnicami pływania przed i po awarii, więc w
kolejnym kroku przyjmujemy masę wody wynikającą z tej różnicy, co powoduje dalsze
przegłębienie, które w kolejnym kroku należy uwzględnić. Tok obliczeń przerywamy gdy wyniki
następujących po sobie przybliżeń stają się niewielkie.
Współczynniki zatopienia.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
26
Określają stopień zatapialności (zatopienia) przedziału, czyli stosunek rzeczywistej ilości wody
jaka może wypełnić przedział do teoretycznej objętości przedziału. Rzeczywista ilość wody jest
mniejsza od teoretycznej ze względu na występujące w przedziałach elementy konstrukcyjne,
wyposażenie czy też ładunek. Wyróżnia się:
- współczynnik zatopienia objętości przedziału:
µ = v/vt (1)
gdzie v – rzeczywista objętość wody w przedziale,
vt – teoretyczna objętość przedziału (odczytywana z linii teoretycznych statku)
- współczynnik zatopienia powierzchni cieczy w przedziale µ a = a/at ,
- współczynniki zatopienia momentu bezwładności (poprzecznego i wzdłużnego) powierzchni
cieczy znajdującej się w przedziale po awarii µiξ = iξ/iξt i µiη = iη/iηi .
Przy obliczeniach zwykle przyjmuje się µ =µ a = µiξ = µiη . [2]
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Kabaciński J.: Stateczność i niezatapialność statku, Szczecin 1998 r.
3. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
27
Temat 12 (1 godzina): Dynamika okrętu, opis ruchów statku w warunkach morskich.
Środowisko morskie opisuje się złożonymi czasowo-przestrzennymi procesami losowymi, dlatego
ruch statku w takich warunkach można opisać następującym stochastycznym układem nieliniowych
równań różniczkowych:
��( ,�)����(�)� = ����( )���(�), ��(�), �(�)�� + ���( )��(�), ���
k, l = 1,2, … 6 (1)
gdzie:
��( ,�)� - macierz uogólnionych mas jednostki,
��(�)(�), ��(�)(�), �(�)(�) – uogólnione losowe przyspieszenia, prędkości i przemieszczenia jednostki
pływającej,
����( )� - uogólnione siły hydromechaniczne,
���( )� - uogólnione siły wymuszające od środowiska morskiego,
Uogólnione zewnętrzne siły hydrodynamiczne ����( )� można przedstawić w postaci:
����( )� = ����( )���(�)�� + ���( )���(�)�� + ����( )��(�)�� (2)
gdzie:
����( )���(�)�� - wektor uogólnionych hydrodynamicznych sił bezwładnościowych, które w
kołysaniach statku przedstawia się w postaci liniowej zależności od przyspieszeń:
����( )���(�)�� = −� ( ,�)����(�)� (31)
gdzie � ( ,�)� jest macierzą uogólnionych mas hydrodynamicznych,
���( )���(�)�� - wektor uogólnionych sił tłumienia, które w przypadku dużych prędkości jednostki
pływającej są w postaci nieliniowej, natomiast w kołysaniach statku są przedstawione w postaci
liniowej:
���( )���(�)�� = −�!( ,�)����(�)� (42)
gdzie �!( ,�)� jest macierzą współczynników uogólnionych hydrostatycznych sił
przywracających,
����( )��(�)�� - wektor uogólnionych hydrostatycznych sił przywracających, które w kołysaniach
statku, szczególnie dla małych wartości kołysań, są przedstawione w postaci liniowej:
����( )��(�)�� = −�"�( ,�)���(�)�
k, l = 1,2, … 6 (5)

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
28
gdzie �"�( ,�)� - jest macierzą współczynników uogólnionych hydrostatycznych sił
przywracających.
Uogólnione siły wymuszające ���( )� od środowiska morskiego można przedstawić w postaci:
���( )��(�), ��� = ���#( )��(�)�� + ���( )��(�), ��� (3)
gdzie:
���#( )� – jest quasi-statyczną częścią siły wymuszającej, która w prognozach krótkoterminowych jest
wartością stałą niezależną od czasu,
���( )� – jest dynamiczną częścią siły wymuszającej, jest przedstawiana w postaci liniowej (liniowo
proporcjonalnej do amplitudy fali).
Przyjmując liniową zależność zewnętrznych sił wymuszających od parametrów ruchu statku i
parametrów falowania, kołysania statku na fali regularnej (harmonicznej) danej równaniem (równanie
fali harmonicznej) można opisać układem liniowych równań różniczkowych:
���( ,�)� + � ( ,�)�����(�)� + �!( ,�)����(�)� + �"( ,�)���(�)� = ���( )�
k, l = 1,2, … 6 (74)
gdzie:
��( ,�)� – macierz uogólnionych mas statku,
� ( ,�)� – macierz uogólnionych mas hydrodynamicznych statku,
�!( ,�)� – macierz współczynników uogólnionych sił tłumienia,
�"( ,�)� – macierz współczynników uogólnionych hydrostatycznych sił przywracających,
��(�)�, ���(�)�, ���(�)� – wektory uogólnionych przemieszczeń, prędkości i przyspieszeń od kołysań,
���( )� – wektor uogólnionych falowych sił wymuszających kołysania.
Ponieważ układ: kołyszący się statek – falowanie jest liniowy, to kołysania wywołane falą, której
profil zapisany w nieruchomym układzie współrzędnych, dany wyrażeniem:
])sincos([ 00 tyxkieA
ωµµζζ −+−⋅= , (8)
gdzie:
ζA – amplituda fali,
– kierunek falowania,
x0, y0 – współrzędne w nieruchomym układzie współrzędnych O0,x0,y0,z0.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
29
Rys. 1 Układy współrzędnych względem: O0, x0, y0, z0 – nieruchomy w przestrzeni, G, x, y, z – ruchomy,
związany ze statkiem
, mają postać:
�(�) = �$(�)%�&('(�)*(+)) (9)
gdzie:
l – kołysanie statku (kołysania wzdłużne, burtowe, nurzanie, boczne, kiwanie, myszkowanie), zgodnie
z rys. 2
SA – amplituda kołysania l,
εu – kąt przesunięcia fazowego kołysań u względem fali ζ.
Rys. 2 Kołysania statku

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
30
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
31
Temat 13 (2 godziny):Stabilizacja kołysań.
Stabilizator (lub stabilizator kołysania) - element konstrukcji statku redukujący jego kołysanie. Wśród
stabilizatorów wyróżnia się bierne i czynne.
Stabilizatory czynne
Zwane też stabilizatorami aktywnymi, stabilizatorami Denny-Browna lub żyroskopowymi. Do swego
funkcjonowania wymagają zasilania energią wytwarzaną na statku. Przeznaczone są do zmniejszania
amplitudy kołysań statku (okrętu).
Wyróżniamy:
• stabilizatory Denny-Browna - działają na zasadzie podobnej do lotek w samolocie. Mają
postać wysuwanych z części podwodnej kadłuba płetw (sterów) wychylających się dookoła
swojej osi. Wytwarzają moment hydrodynamiczny przeciwdziałający przechyłom, dzięki
skoordynowaniu swoich wychyleń z falowaniem morza. Dzięki automatyce płetwy ustawiane
są w ten sposób, tak aby składowe pionowe naporu wody tworzyły moment stabilizacyjny. Do
swego działania wymagają ruchu jednostki pływającej. Stosowane są przede wszystkim na
statkach pasażerskich (liniowce, wycieczkowce, promy), niektórych okrętach wojennych
(fregaty). Stabilizatory Denny-Brown posiadał polski prom pasażersko samochodowy
Rogalin.
• stabilizatory żyroskopowe - wykorzystują właściwości symetrycznych ciał wirujących, czyli
stabilność i precesję. Zasada ich działania polega na umieszczeniu masywnego żyroskopu w
płaszczyźnie symetrii statku, w rejonie jego śródokręcia. Przez to wirujący żyroskop dążąc do
zachowania pierwotnego położenia, przeciwdziała momentowi przechylającemu jednostkę
pływającą. Do wad tego rozwiązania należy zaliczyć dużą masę i objętość jakie zajmuje to
urządzenie, jego energochłonność. Zaletą natomiast jest działanie również przy stawaniu w
dryfie. Stosowany na mniejszych jednostkach oraz na statkach pasażerskich. Stabilizator
żyroskopowy posiadał TSS Stefan Batory.
• sterowane zbiorniki stabilizacyjne - instalacja, w której stosowany jest układ zbiorników,
rurociągów, wysokowydajnych pomp oraz sterowania komputerowego w celu równoważenia
przechyłów masą przepompowywanej wody. Stosowane są rzadko, w większości przypadków
na promach kolejowych, gdzie zastosowanie tego rozwiązania jest również wykorzystywane

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
32
przy załadunku i rozładunku składów pociągów. Sterowane zbiorniki stabilizacyjne posiada m
in. prom MF Polonia.
Stabilizatory bierne
Zwane też stabilizatorami pasywnymi, przelewowi zbiornikami stabilizacyjnymi, zbiornikami Frahma,
cysternami Frahma oraz stępkami przechyłowymi. Służą temu samemu celowi co stabilizatory
pasywne.
Rodzaje:
• przelewowe zbiorniki stabilizacyjne - działają na zasadzie przelewania się wody między
dwoma częściowo napełnionymi zamkniętymi burtowymi zbiornikami wody słonej. Woda
przelewa się między nimi przez zwężający się regulowany kanał denny, który dzięki zmianie
przekroju czynnego powodującego też zmianę oporu przepływu cieczy pomiędzy zbiornikami
oraz zmianę momentu stabilizacyjnego. Stosowane są znacznie rzadziej od stabilizatorów
aktywnych z powodu na zajmowanie dużej objętości kadłuba oraz z uwagi na występowanie
wolnych powierzchni cieczy mogących wpłynąć ujemnie na stateczność statku. Stabilizatory
tego typu stosowane były m in, na statku szkolnym Antoni Garnuszewski.
• odmianą tego rozwiązania są tzw. zbiorniki czynne posiadające układy automatyki sterującej
przepływem wody.
• spotyka się również działające na podobnej zasadzie, tzw. zbiorniki otwarte mające
bezpośrednie połączenie z wodą zaburtową. Przy przechyłach woda wlewa się lub wylewa z
nich, napełniając je dając w ten sposób moment stabilizacyjny. W rozwiązaniu tym
przeciwległe zbiorniki połączone są kanałem powietrznym zaopatrzonym w zawór
regulacyjny.
• stępki przechyłowe - listwy szerokości do 1,2 metra i długości dochodzącej do 40% długości
linii wodnej biegnące po obu burtach kadłuba. Zlokalizowane są przy wyobleniach części
podwodnej kadłuba. Służą do stabilizacji przy dużych kątach przechyłu. Stosowane
powszechnie na jednostkach pływających.
Stabilizatory Denny-Brown mogą być również używane jako stabilizatory bierne np. w przypadku
pełnego i jednakowego wysunięcia podczas postoju w porcie. Zbiorniki przelewowe aktywne z racji
stosowania w nich układów sterownia mogą zostać zaliczone do stabilizatorów aktywnych.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
33
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1
Temat 14 (1 godzina): Oddziaływanie steru na ruch statku.
Zadaniem steru jest zapewnienie okr
ograniczeniu sił, potrzebnych do jego wychylenia. D
steru spowodowało niemal całkowite wyparcie sterów płaskich, płytowych, przez stery oprofilowane,
o profilu symetrycznym w kształcie tzw. płata no
okrętu.
Ster jest tym urządzeniem podczas manewrów, które obok nap
manewrowania. Efektywność działania steru zale
ster (w zależności od warunków pracy).
1 - wielkosci płaszczyzny pióra sterowego,
2 - kąta wychylenia tej płaszczyzny do płaszczyzny symetrii statku,
3 – strumienia wody, który uderza w płaszczyzn
Na ster działa siła naporu „P” przyło
symetrii płata (rys. 1, rys. 2). Rzeczywista
rzeczywistej nie jest prostopadła do kierunku pr
wpływu sił lepkości cieczy rzeczywistej. Po rozło
prędkości przepływu niezakłóconego i równoległ
rzeczywistą silę oporu R (rys. 1). Opór ten przy płacie o sko
indukowanego i oporu profilowego, spowodowanego oporem tarcia i oporem ci
odrywania się warstwy granicznej i wywołanych tym ró
profilu.
środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
34
Oddziaływanie steru na ruch statku.
Zadaniem steru jest zapewnienie okrętowi należytej sterowności przy moż
potrzebnych do jego wychylenia. Dążenie do uzyskania optymalnych wyników pracy
steru spowodowało niemal całkowite wyparcie sterów płaskich, płytowych, przez stery oprofilowane,
o profilu symetrycznym w kształcie tzw. płata nośnego, zapewniające znacznie l
dzeniem podczas manewrów, które obok napędu głównego decyduje o skuteczno
ść działania steru zależy bezpośrednio od siły obracają
ci od warunków pracy). Siła obracająca zależy od:
wielkosci płaszczyzny pióra sterowego,
ta wychylenia tej płaszczyzny do płaszczyzny symetrii statku,
strumienia wody, który uderza w płaszczyznę pióra sterowego.
Na ster działa siła naporu „P” przyłożona w środku płata steru i skierowana prostopadle do osi
symetrii płata (rys. 1, rys. 2). Rzeczywista siła hydrodynamiczna P, działają
rzeczywistej nie jest prostopadła do kierunku prędkości, lecz będzie od niej odchy
ci cieczy rzeczywistej. Po rozłożeniu tej siły na dwie składowe: prostopadł
ci przepływu niezakłóconego i równoległą do niej, otrzymamy rzeczywist
1). Opór ten przy płacie o skończonej rozpiętości b
indukowanego i oporu profilowego, spowodowanego oporem tarcia i oporem ciś
warstwy granicznej i wywołanych tym różnicami ciśnień na przedniej i tylnej cz
Rys. 1 Rozkład sił na sterze
rodków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
kierunków technicznych w Akademii Morskiej w Szczecinie”
500 Szczecin
ci przy możliwie największym
nia optymalnych wyników pracy
steru spowodowało niemal całkowite wyparcie sterów płaskich, płytowych, przez stery oprofilowane,
ce znacznie lepszą sterowność
du głównego decyduje o skuteczności
rednio od siły obracającej jaką dysponuje
rodku płata steru i skierowana prostopadle do osi
działająca na płat w cieczy
dzie od niej odchylona wskutek
eniu tej siły na dwie składowe: prostopadłą do
rzeczywistą siłę nośną L oraz
ę ści będzie sumą oporu
indukowanego i oporu profilowego, spowodowanego oporem tarcia i oporem ciśnienia, wynikłym z
na przedniej i tylnej części

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
35
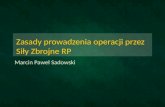
Wielkość siły naporu na ster zależy od przepływu wokół płata (czyli prędkości statku i naporu
pędnika). Kierunek ruchu statku i kierunek wychylenia wpływa na kierunek obrotu statku (rys. 2). Na
rys. 3 rzeczywistą siłę nosną oznaczono Ts, natomiast siłę oporu Rs. Z tego rysunku wynika, że
maksymalna siła nośna występuje w zakresie = 35-40o przy jednocześnie umiarkowanych
wartościach siły oporu – jest to najkorzystniejszy zakres kąta wychylanie steru. W praktyce klasyczne
stery są budowane tak, aby nie przekraczać tego kąta.
Rys. 2
Rys. 3 Siła nośna Ts i opór Rs w zależności od kąta wychylenia steru

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
36
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
37
Temat 15 (2 godziny): Zakres przeglądów okresowych, dokowanie.
Klasa statku o ile nie jest zaznaczone inaczej, nadawana jest na okres 5-ciu lat. Jednakże utrzymanie i
ewentualne przedłużenie ważności klasy wymaga przeprowadzenia przeglądów okresowych:
• roczny (w celu potwierdzenia klasy),
• pośredni,
• klasowy (w celu nadania klasy - klasyfikacyjny lub przedłużenia klasy - reklasyfikacyjny).
Ponadto wymagane jest przeprowadzenie przeglądów przedmiotowych: podwodnej części kadłuba –
w zależności od typu statku corocznie (pasażerskie, wodoloty, lodołamacze, statki z klasą lodową L1A
i L1) lub co 2 – 3 lata dla statków innych typów, wału śrubowego co 5 lat, kotłów co 2 lata, a po
ośmiu latach co roku.
Zakres tych przeglądów jest określony w przepisach każdej instytucji klasyfikacyjnej. W przypadku
jakiejkolwiek awarii, niezależnie od jej naprawy, może być wymagany przegląd określonej części
statku.
Dokowanie statku
Przeglądy części podwodnej wykonywane w celu odnowienia klasy wymagają dokowania statku, w
pozostałych przypadkach (pośrednie i coroczne) mogą być wykonane przez nurków o ile statek jest do
tego przystosowany.
Statki powinny być dokowane w miarę potrzeby. To znaczy w miarę zużycia malarskich powłok
ochronnych i obrastania kadłuba, co oprócz przyspieszenia zużycia poszycia zewnętrznego powoduje
spadek prędkości statku, ujemnie wpływając na efekt ekonomiczny eksploatacji statku.
W wodach południowych, gdzie obrastanie bardzo szybko postępuje, dokowanie powinno odbywać
się co najmniej dwa razy w roku, w wodach północnych znacznie rzadziej. W każdym wypadku
dokowanie pożądane jest raz do roku, najlepiej przed okresem wzmożonej eksploatacji.
Przepisy instytucji klasyfikacyjnych wymagają dokonania przeglądu podwodnej części kadłuba – w
zależności od typu statku corocznie (pasażerskie, wodoloty, lodołamacze, statki z klasą lodową L1A i
L1) lub co 2 – 3 lata dla statków innych typów. Zakres przeglądu jest określony w przepisach każdej
instytucji klasyfikacyjnej. W przypadku jakiejkolwiek awarii, niezależnie od jej naprawy, może być
wymagany przegląd określonej części statku, także podwodnej. Przeglądy części podwodnej

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
38
wykonywane w celu odnowienia klasy wymagają dokowania statku, w pozostałych przypadkach
(pośrednie i coroczne) mogą być wykonane na wodzie (przez nurków) o ile statek jest do tego
przystosowany.
Aby uniknąć kosztownego specjalnego dokowania, należy tak rozplanować prace, które mogą być
wykonane tylko w doku, aby, o ile to możliwe, mogły być wykonane podczas standardowych,
okresowych przeglądów w doku.
Prace w doku
Wprowadzenie statku do doku, które jest obowiązkowe przy przeglądach okresowych lub przy
uszkodzeniu dna, powinno być wykorzystane do wykonania prac, które nie mogą być wykonane na
wodzie.
1. Oczyszczenie dna z rdzy i obrostów i malowanie świeżą farbą.
2. Wymiana anod ochrony katodowej (należy uważać by nie uległy zamalowaniu).
3. Sprawdzenie kingstonów zatapiania i innych zaworów podwodnych. Przeprowadzić próbę
działania (powinny działać sprawnie, bez zacięć). Uszkodzone powinny być bezwzględnie naprawione
lub wymienione.
4. Sprawdzenie łańcuchów i kotwic w doku oraz ich pomalowanie. Kotwicę opuszcza się i odłącza
od łańcucha, który kładzie się na rozciągające się wzdłuż doku specjalne dębowe chodniki lub gdy ich
nie ma na specjalnie przygotowane podkłady. Kotwicę się rozbiera, oczyszcza, miejsca tarcia smaruje,
a same kotwice maluje. Łańcuch poddaje się oględzinom, ewentualnie zmieniając kierunek i kolejność
przęseł lub odsyłając je do próby na rozciąganie. Złożone na nowo łańcuchy maluje się i ewentualnie
odnawia oznaczenia.
5. Korzystając z postoju w doku, dokonuje się przeglądu i oczyszcza stery strumieniowe, membrany
podwodnych akustycznych przyrządów, log i inne podwodne mechanizmy.
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
39
Temat 16 (2 godziny): Teoria i budowa okrętu
Opór
W problematyce napędu statku na pierwszy plan wysuwa się jego opór, czyli siła przeciwna napędowi.
Określanie oporu statku odgrywa znaczącą rolę w dziedzinie projektowania i eksploatacji statku. Na
opór statku maja przede wszystkim wpływ takie czynniki jak prędkość, wyporność statku oraz kształt
kadłuba. Całkowity opór RT można rozdzielić na trzy główne podgrupy:
• opór tarcia;
• opór resztowy;
• opór powietrza.
Wpływ oporów tarcia i resztowego zależy od części zanurzonej kadłuba statku (podwodzia), natomiast
na opór powietrza wpływa część nawodna statku (powyżej wodnicy pływania). Większy wpływ oporu
powietrza będzie występował na kontenerowcach, kontenerowcach dużą liczba kontenerów
umieszczonych na pokładzie.
Opór tarcia (RF) zależy od powierzchni zwilżonej kadłuba AS oraz współczynnika oporu tarcia CF.
Tarcie wzrasta z zanieczyszczaniem kadłuba (obrastaniem). Opór tarcia stanowi znaczącą część oporu
całkowitego (70~90 %) przy małych zakresach prędkości (masowce i zbiornikowce) oraz do 40%
oporu całkowitego w przypadku statków szybkich (liniowce oraz statki pasażerskie).
Opór resztowy (RR) obejmuje opór falowy oraz opór wirowy. Opór falowy ma związek ze stratą
energii spowodowaną przez fale generowane ruchem statku, natomiast opór wirowy powoduje straty
spowodowane oderwaniem się warstwy przyściennej tworzącej wiry, szczególnie w rufowej części
statku.
Opór falowy przy małych prędkościach jest proporcjonalny do kwadratu prędkości, przyrastając o
wiele szybciej dla dużych prędkości. Opór resztowy stanowi 8~25 % oporu całkowitego dla statków
wolnych, natomiast 40~60 % dla statków szybkich. Na opór resztowy może mieć wpływ również
obszar pływania – wody płytkie, z powodu większej trudności w przemieszczaniu się wody pod
statkiem.
Na wodzie spokojnej opór powietrza (RA) jest proporcjonalny do kwadratu prędkości statku oraz pola
powierzchni bocznej statku powyżej wodnicy pływania. Opór powietrz typowo stanowi 2% oporu
całkowitego]. W przypadku kontenerowców opór ten może wzrosnąć do 10 %.
Basen modelowy
Okrętowe baseny modelowe są przeznaczone do badań:

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
40
• charakterystyk oporowo-napędowych kadłuba,
• właściwości morskich,
• charakterystyk śrub (tunele kawitacyjne),
• zachowania statku w lodach.
Typowy basen modelowy ma kilkanaście metrów szerokości i kilkaset metrów długości. Zwykle jest
wyposażony w pomost holowniczy na którym jest holowany model i zamocowana aparatura
pomiarowo-rejestrująca. Istotna jest prędkość przemieszczania pomostu, może wynosić do 12 m/s.
Basen jest zwykle wyposażony w generator fal regularnych oraz fal nieregularnych.
Pędnik okrętowy jest to mechaniczne urządzenie napędowe, które wytwarza siłę naporu wprawiającą
okręt w ruch postępowy, poruszające się wraz z okrętem.
Śruba okr ętowa jest pędnikiem hydraulicznym o osi poziomej, wzdłużnej, składającym się z szeregu
(dwa do siedmiu) skrzydeł usytuowanych promieniowo w piaście, w jednakowych odstępach
kątowych od siebie. Przy jednoczesnym, jednostajnym ruchu obrotowym śruby i jednostajnym ruchu
postępowym statku punkty skrzydeł opisują w przestrzeni regularne linie śrubowe. Kształt skrzydeł
jest taki, że w wyniku obrotów śruby woda odrzucana jest w stronę przeciwną do ruchu śruby. Reakcja
odrzucanych mas wody odrzucana jest w stronę przeciwną do ruchu śruby.
- śruby o skoku ustalonym,
- śruby o skoku nastawnym (śruby nastawne),
- zespoły dysza-śruba,
- śruby w pełni kawitujące (śruby superkawitacyjne); dzięki specjalnym, klinowym kształtom
profilów w zakresie dużych prędkości, przy całkowicie rozwiniętej kawitacji, odznaczają się
wysokimi sprawnościami,
- śruby tandem (dwustopniowe) współbieżne i przeciwbieżne; zachowując zalety napędu
pojedynczym wałem odciążają i zmniejszają śruby.
Pędnik cykloidalny jest pędnikiem o osi pionowej, w którym napór powstaje na łopatkach
zamocowanych pionowo na obwodzie poziomego bębna. W wyniku ruchu postępowego okrętu i
ruchu obrotowego bębna oś łopatki porusza się po cykloidzie, natomiast łopatka względem osi
wykonuje ruchy kątowo-zwrotne, sterowane. Przez zmianę ustawienia osi łopatek można uzyskać
zmienną co do kierunku i wartości siłę naporu pędnika. Ster staje się zbędny. Inną zaletą pędnika jest
stały kierunek i stała liczba obrotów bębna, dzięki czemu silnik napędowy nie musi być rewersyjny.
Ma jednak wiele wad. Aby go zastosować należy specjalnie projektować kształt statku. Jest bardzo

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
41
skomplikowany i drogi, mało pewny w działaniu, delikatny – wymaga fachowej obsługi. Nie może
być stosowany na wodach płytkich i zanieczyszczonych. Jego sprawność jest nieco niższa od
sprawności śruby okrętowej. Stosowany jest na holownikach portowych, promach, tramwajach
wodnych i dźwigach pływających.
Pędnik strugowodny to element roboczy (najczęściej pompa) umieszczony w specjalnym
kanale, który jest częścią kadłuba, zasysający wodę przez specjalne otwory i wyrzucający ja przez
kanały wylotowe położone poniżej, na lub powyżej linii wodnej. W zależności od konstrukcji
elementu roboczego rozróżnia się pędniki strugowodne z pompami śrubowymi osiowymi, pędniki
strugowodne z pompami odśrodkowymi i pędniki odrzutowe pracujące bez pompy na mieszaninę
gazów spalinowych i wody. Wylot pędników strugowodnych bardzo często wyposażony jest w
urządzenie zmieniające kierunek odrzucanych mas wody lub gazu i wody (dysze obrotowe, zastawki,
stery). Umożliwia to zmianę kierunku naporu. Taki pędnik jest jednocześnie urządzeniem sterującym.
Pozwala także uzyskać napęd wsteczny bez zmiany kierunku obrotów silnika napędowego. Inną zaletą
pędników strugowodnych jest łatwość ochrony ruchomych części pędnika przed uszkodzeniem
mechanicznym, co ma szczególnie istotne znaczenie dla statków śródlądowych eksploatowanych na
bardzo płytkich wodach.
Koło łopatkowe jest pędnikiem częściowo zanurzonym, o osi poziomej, poprzecznej, w którym
napór powstaje na łopatkach poruszających się po cykloidzie. W starych konstrukcjach nieruchome
(względem koła) łopatki rozmieszczone były promieniowo. Taka łopatka wchodząc do wody uderzała
o jej powierzchnię, a wychodząc z wody zagarniała ją usiłując podnieść. Zjawiska te były przyczyną
strat energetycznych oraz uderzeniowych obciążeń konstrukcji. Konstrukcję poprawiono, nadając
łopatce dodatkowy ruch kątowo-zwrotny tak sterowany, aby kąt dopływu wody do łopatki podczas
wchodzenia do wody i wychodzenia z wody był bliski zeru (wchodzenie i wychodzenie
bezuderzeniowe), natomiast w dolnym położeniu łopatki osiągał wartość około 90°. Koło łopatkowe
umieszcza się po burtach lub na rufie okrętu. Jest ono konstrukcją bardzo skomplikowaną, kłopotliwą
w montażu i obsłudze, dużą i ciężką. Bardzo czułe na zmiany zanurzenia, kołysania boczne i
falowanie, dlatego nie nadaje się do napędu okrętów morskich. Dobrze zaprojektowane koło
łopatkowe osiąga sprawność śruby okrętowej, a na wodzie płytkiej znacznie ją przewyższa, dlatego
bywa stosowane na szerokich i płytkich wodach śródlądowych. Inną wadą jest bardzo mała liczba
obrotów koła łopatkowego, co zmusza do zastosowania wielostopniowej przekładni.
Geometria śruby
Dokumentacja geometrii śruby okrętowej obejmuje:

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
42
• rysunek powierzchni wyprostowanej skrzydła wraz z rysunkiem profilów skrzydła na
poszczególnych promieniach,
• rysunek rzutu normalnego oraz rysunek rzutu bocznego skrzydła wraz z rysunkiem piasty i
wykresem maksymalnych grubości skrzydła.
Strona skrzydła zwrócona w kierunku ruchu statku nazywa się stroną ssącą, a stronę przeciwną –
stroną cisnącą. Krawędź skrzydła zwrócona w kierunku obrotu śruby nazywa się krawędzią natarcia, a
krawędź przeciwną – krawędzią spływu.
Na rzucie bocznym poza obrysem rzutu skrzydła, wykreśla się tzw. wzdłużny przekrój skrzydła – jest
to przekrój umowny otrzymany przez odłożenie od osi skrzydła OC największych grubości profili
skrzydła na danych promieniach. Na rzucie tym wymiarujemy:
• piastę,
• e – największe grubości skrzydła na kolejnych promieniach,
• ew – grubość skrzydła przy wierzchołku,
• m – odchylenie skrzydła przy wierzchołku
Do podstawowych parametrów definiujących śrubę zalicza się:
• średnica śruby (d);
• liczba skrzydeł śruby (z);
• współczynnik pola śrubowego;
• współczynnik skoku śruby (p/d);
• skok śruby (p);
• poślizg śruby (S);
• współczynniki posuwu (J), momentu (KQ) i naporu (KT).
Rys. 1 Ruch śruby

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
43
Średnica śruby (d)
Jest ona odległością między dwoma przeciwnymi wierzchołkami śruby. W celu osiągnięcia
najwyższej możliwej sprawności dąży się do jak największej średnicy śruby (oczywiście w możliwym
zakresie – okno śrubowe). Kształt rufy może znacznie różnić się w zależności od typu statku,
natomiast odległość wierzchołka śruby od kadłuba różni się w zależności od rodzaju zastosowanego
pędnika.
W przypadku masowców i zbiornikowców, które często pływają pod balastem wymaga się, aby
pędnik był całkowicie zanurzony właśnie w tym stanie co znacznie ogranicza średnicę śruby.
Ograniczenie to nie jest tak ważne w przypadku kontenerowców, gdyż one rzadko pływają w stanie
pod balastem.
Zazwyczaj nie podaje się ograniczenia dotyczącego samej średnicy śruby, podaje się natomiast
warunki oparte na doświadczeniach co do stosunku średnicy śruby do zanurzenia statku (d/T).
Proporcja ta powinna mieścić się w określonych wartościach:
d/T < 0.65 – dla masowców i zbiornikowców;
d/T < 0.74 – dla kontenerowców.
Z wytrzymałościowych i produkcyjnych powodów średnica śruby nie powinna przekraczać 10
metrów.
Liczba skrzydeł śruby (z)
Śruby mogą być wykonywane ze skrzydłami w liczbie od 2~6. Im mniejsza liczba skrzydeł śruby tym
większa sprawność pędnika. Standardowo statki pływają z pędnikiem z 4-5 skrzydłami. Ze względów
wytrzymałościowych śruba poddana ciężkiemu obciążeniu nie może być 2-3 skrzydłowa - pędniki 2-
skrzydłowe używane są na jednostkach małych.
Statki o relatywnie wysokiej mocy z mocno dociążonym pędnikiem (np. kontenerowce) posiadają
śruby 5-6 skrzydłowe. W niektórych przypadkach śruby o określonej liczbie skrzydeł mogą
powodować wibracje w wyniku których następuje wzbudzanie naturalnych częstotliwości kadłuba
statku lub nadbudówki.
Współczynnik pola śrubowego
Współczynnik ten określa pole powierzchni rozwiniętej śruby w odniesieniu do pola śrubowego.
Wartość 0.55 przyjmowana jest jako dobra. Dla statków ze szczególnie obciążonymi śrubami (5-6
skrzydłowe) wartości mogą być wyższe, osiągając dla okrętów wojennych nawet 1.2.
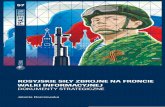
Współczynnik skoku (p/d) i skok śruby (p)
Współczynnik ten wyraża stosunek skoku śruby(p) do jego średnicy (d), ukazany na rys. 1.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
44
Skok (p) teoretycznie jest dystansem mierzonym po linii prostej wykonanym przez śrubę w czasie
jednego obrotu wału. Ponieważ skok może zmieniać się wzdłuż promienia skrzydła współczynnik
skoku jest odnoszony do skoku na 0.7 promienia skrzydła.
W celu osiągnięcia najwyższej sprawności napędu należy powiązać właściwie średnicę śruby, jej skok
oraz prędkość obrotową. Przy wymaganych mniejszych obrotach współczynnik skoku wzrasta i
odwrotnie kosztem sprawności.
Współczynniki posuwu (J), momentu (KQ) i naporu (KT)
Teoria pędnika opiera się na modelach, jednak dla ułatwienia używania tej teorii niektóre
niewymiarowe współczynniki zostały
przedstawione w odniesieniu do średnicy
śruby (d), prędkości obrotowej (n) oraz
gęstości wody (ρ).
Przy użyciu wykresów śrubowych
zawierających krzywe współczynników
momentu oraz naporu śruby w funkcji
współczynnika posuwu jest możliwe
określenie wymiarów śruby, jej sprawności,
siły naporu oraz moment obrotowego.
Charakterystyki śruby
Normalną praktyką jest uwzględnianie
dodatkowego zapasu mocy nazywanego
dodatkiem żeglugowym, przyjmowanym
zazwyczaj zgodnie z praktyką morską na 15
%. Dodatek ten uwzględnia dodatkowy opór
związany z warunkami pogodowymi (fala i
wiatr). Dodatek żeglugowy ma zapewnić
prędkość projektową statku w pogorszonych
warunkach pogodowych. Oczywiście
warunki sztormowe mogą spowodować większy wzrost oporu, jednak wówczas nie da się utrzymać
prędkości projektowej.
Na rys. 2 przedstawiona jest moc napędu w funkcji prędkości statku z uwzględnieniem dodatku
żeglugowego.
Rys. 2. Moc napędu w funkcji prędkości statku z
uwzględnieniem dodatku żeglugowego

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
45
Wzrost oporu wymaga wzrostu mocy zapotrzebowanej (15 % dodatku) dla utrzymania prędkości
projektowej. Punkt pracy przesuwa się z punktu A do punktu B.
Rysunek 3 przedstawia natomiast moc napędu w funkcji obrotów śruby. Zakłada się, że punkt A
przesunie się do punktu B’ z powodu niezmiennych obrotów śruby z niezmiennym jej skokiem,
niestety ruch śruby w wodzie powoduje jej poślizg, wzrost naporu spowodowanym wzrostem oporu
kadłuba. Zatem punkt A przesunie się do punktu B bardzo blisko krzywej śrubowej A. Punkt B będzie
umiejscowiony na krzywej śrubowej lekko przeciążonej w porównaniu do krzywej dla czystego
kadłuba i wody spokojnej.
Rys. 3. Moc napędu w funkcji obrotów śruby
Niekiedy, gdy kadłub jest porośnięty oraz gdy statek pływa w trudnych warunkach, wzrost oporu
może być znacznie większy, odpowiadający dodatkowi mocy 100 % a nawet wyższej. Przypadek ten
ilustruje rysunek 4.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
46
Rys. 4. Moc napędu odniesiona do trudnych warunków pływania
W przypadku tym, gdy 100 % mocy daje założoną prędkość w punkcie A, w punkcie C przy
spokojnych warunkach pogodowych i czystym kadłubie wymagana jest moc 50 %. Jednakże w
ciężkich warunkach może być możliwe uzyskanie jedynie mniejszej prędkości przy obciążeniu 100
procent podążając wzdłuż punktu A do D (rys.4). Punkt pracy D może więc znajdować się relatywnie
daleko na lewo od punktu A (śruba mocno obciążona).
W czasie żeglugi w trudnych warunkach pływania (z dużym oporem od fal) śruba może być obciążona
o 7~8 % bardziej, przy tej samej mocy, niż na wodzie spokojnej. Ukazuje to przykład pomiarów
dokonanych na małym kontenerowcu w ciągu 1 roku uwzględniający wpływ jedynie warunków
pogodowych (rys. 5).

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
47
Rys. 5. Wyniki pomiarowe obciążeń śruby dla kontenerowca jednośrubowego
Urządzenia sterowe
Okrętowe urządzenia sterowe - pod tym pojęciem rozumiemy urządzenia służące do sterowania
statkiem, to znaczy nadawania mu odpowiedniego kierunku ruchu.
Zasada działania steru polega na wytworzeniu siły skierowującej kadłub statku w odpowiednią
stronę.
Wyróżniamy dwa zasadnicze typy urządzeń sterowych:
a) aktywne - działają nawet przy zerowej prędkości statku względem wody (np. ster strumieniowy),
b) bierne - siła reakcji zależy od prędkości wody omywającej kadłub, działają tym lepiej, im
większą prędkość ma statek (np. płetwa sterowa).
Stery strumieniowe to urządzenia, które zmieniają kierunek ruchu statku lub położenie jego względem
osi wzdłużnej w wyniku przepompowywania wody. Powstaje reakcja przeciwna do kierunku
wyrzucanego strumienia wody. (rys. 6).

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
48
Rys. 6. Rodzaje poprzecznych kanałów sterów strumieniowych:
a-prosty kanał poprzeczny, b-daszkowy kanał poprzeczny, c-poprzeczny kanał piętrowy z przepływem w
kształcie litery Z,
Właściwości manewrowe
Okręt o dobrych właściwościach manewrowych powinien posiadać cechy dobrej sterowności, a więc
zarówno dobrej sterowności, jak i stateczności kursowej.
stateczność kursowa, zwrotność
(wielkość cyrkulacji, zdolność przyspieszania, zdolność hamowania, minimalna szybkość manewrowa
Sterownością okrętu nazywamy jego zdolność do zmiany kierunku ruchu. Cecha ta decyduje
o właściwościach manewrowych okrętu i z tego też powodu gra ważną rolę w ogólnych wymaganiach
stawianych okrętowi.
Zapewnienie sterowności i stateczności kursowej okrętu uzyskujemy dzięki sterom,
umieszczonym z reguły w rufowej części okrętu. Obie te cechy zależeć będą od wielkości, kształtu i
miejsca umieszczenia steru, jednakże poważny wpływ będzie miał na nie również kształt kadłuba.
Podstawowe cechy manewrowe statku to przede wszystkim:
• stateczność kursowa – zdolność do utrzymywania obranego kursu i przeciwstawienia się
działaniu sił zewnętrznych (wiatru i fali), prowadzących do zmiany kierunku jego ruchu. Brak
stateczności kursowej, objawiający się samorzutnym odchylaniem się okrętu od danego kursu
i trudnością utrzymania kursu powoduje wzrost oporów okrętu przez wychylenia steru, spadek
średniej prędkości okrętu i zwiększenie zużycia paliwa.
• zdolność utrzymania prędkości – możliwość jednostki w zakresie zachowania dowolnej
prędkości w istniejących warunkach lub pomimo ich zmiany. Ta cecha statku jest niezwykle
ważna dla statków eksploatowanych w tzw. żegludze liniowej.

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
49
• zdolność przyspieszania – zdolność statku w zakresie rozwijania prędkości. Dotyczy to
zarówno przyspieszania od zera do szybkości maksymalnej jak i do przyspieszania od
dowolnej szybkości do innej dowolnie większej.
• zdolność zatrzymywania – zdolność hamowania jednostki w zakresie zmniejszania prędkości.
Dotyczy to zarówno hamowania z maksymalnej prędkości do całkowitego zatrzymania jak i
do zwalniania z dowolnej szybkości do dowolnej mniejszej. Zdolność deceleracji determinuje
drogę hamowania, co ma związek bezpośrednio z bezpiecznym zatrzymaniem sie statku przed
przeszkoda, czy niekorzystną sytuacją nawigacyjną. Najłatwiej zatrzymać statek o dużym
oporze. Do tej grupy należą wielkie statki masowe, zbiornikowce czy inne o pełnotliwych
kształtach.
•
Literatura
1. Dudziak J.: Teoria okrętu, Gdańsk 1988.
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.
6. Konwencja STCW’95,
7. Konwencja SOLAS,
8. Orszulok W., Wiewiórski S. – Wyposażenie pokładowe statku handlowego,

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
50
Temat 17 (2 godziny): Wyposażenie ratownicze.
Zakres wyposażenia ratunkowego, skład, konstrukcja i rozmieszczenie na statku regulują przepisy
konwencji SOLAS 74 i Pozaklasyfikacyjne Przepisy Wyposażenia Statków Morskich PRS.
W skład wyposażenia ratunkowego wchodzą:
1. Zbiorowe środki ratunkowe:
- łodzie ratunkowe wraz z urządzeniami do opuszczania ich na wodę,
- pneumatyczne tratwy ratunkowe z urządzeniami do spuszczania ich na wodę,
- sztywne tratwy ratunkowe,
- pływaki ratunkowe,
- wyrzutnie linki ratunkowej.
2. Indywidualne środki ratunkowe:
- koła ratunkowe,
- pasy ratunkowe.
URZĄDZENIA ŁODZIOWE
W skład urządzenia łodziowego wchodzą:
1. Łodzie ratunkowe wraz z osprzętem i wyposażeniem.
2. Żurawiki łodziowe i inne urządzenie spustowe łodzi.
3. Podstawy do ustawiania łodzi na pokładzie.
4. Wciągarki łodziowe.
1. Łodzie ratunkowe.
Konstrukcja, sposób obliczania pływalności, nośności i pojemności łodzi ratunkowych musi
odpowiadać ściśle wymaganiom konwencji SOLAS.
a. Wielkość - jest określona przez liczbę osób i długość:
najmniejsze wg przepisów mają długość 7,3 m (w wyjątkowych wypadkach min. 4,9),
największe zabierają 150 osób lub ich masa z ludźmi i wyposażeniem wynosi maksymalnie 20,3 t.
b. Materiały do budowy kadłuba:
łodzie ciężkie:

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
51
- drewno,
- stal (kadłub spawany, elem. wewn. takie jak ławy i szalunki często z drewna),
łodzie lekkie:
- lekkie stopy (aluminium),
- laminaty poliestrowo-szklane.
Najcięższe są łodzie stalowe i drewniane, najlżejsze z laminatów, które ponadto są niezmiernie
trwałe i nie wymagają konserwacji. Trudne warunki przechowywania łodzi na statku, duże
wahania temperatury i wilgotności powodują korozję łodzi metalowych i rozsychanie lub
butwienie łodzi drewnianych, co wpłynęło na rozwój produkcji i stosowania prawie wyłącznie
łodzi z laminatów.
Laminat składa się z:
- żywic poliestrowych lub epoksydowych, o odpowiednich własnościach mechanicznych
(wytrzymałość na rozerwanie i zginanie wg określonej próby) i fizycznych (odporność na
działanie wody morskiej, produktów naftowych i temperatury, musi być samogasnący),
- zbrojenia z włókna szklanego w postaci mat, taśm lub włókna ciągłego o odpowiednich
własnościach mechanicznych i jak najmniejszej nasiąkliwości, masa włókna szklanehgo w
laminacie powinna wynosić 28 – 38 % masy laminatu.
Grubość poszycia łodzi z laminatu wynosi od 5 do 10 mm w zależności od wielkości łodzi.
Kadłub jest wykonywany jako monolit lub jako dwie połówki połączone stępką, dziobnicą i
tylnicą wykonaną ze stopów aluminium. Poszycie łodzi jest usztywniane wewnętrzną konstrukcją
łodzi, czyli grodziami, ławami wzdłużnymi i poprzecznymi oraz zbiornikami, a w razie potrzeby
stosuje się także wzdłużniki, denniki i wręgi. Poszycie może być wykonane jako konstrukcja
przekładkowa, w której zewnętrzne warstwy są wykonane z laminatu, a przekładka z materiału
piankowego.
c. Konstrukcja – wymiary poszczególnych elementów konstrukcyjnych oblicza się na podstawie
przepisów IK w zależności od wielkości łodzi. Poza tym ławy należy umieszczać możliwie nisko,
a ich odległość od górnej krawędzi okrężnicy (listwa na górnej krawędzi burty) powinna wynosić
według przepisów min. 230-280 mm, w zależności od wielkości łodzi.
d. Wytrzymałość musi być taka, aby można było wodować łódź w stanie pełnego obciążenia. Nie
powinno powodować trwałych odkształceń przeciążenie łodzi drewnianej o 25%, łodzi z
laminatów o 50%

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
52
e. Pływalność łodzi ratunkowych musi być zapewniona przez wbudowane komory pływalnościowe
(łodzie z laminatu, stali i stopów aluminium) lub wyjmowane zbiorniki.
f. Nośność dla łodzi określana jako ilość osób (m = 75 kg), jest funkcją pojemności łodzi V lub
ustala się ją w zależności od rzeczywistej liczby miejsc o znormowanych wymiarach w łodzi, przy
zachowaniu wolnej burty łodzi równej większej wartości z dwóch – 0,06L lub 0,44H (L,H –
wymiary główne łodzi).
g. Kształt określa współczynnik pełnotliwości podwodzia łodzi, który dla łodzi drewnianych wynosi
min. 0,6 a dla innych 0,64. Wymiary główne i ich stosunki także muszą zawierać się w
określonych granicach.
h. Napęd.
Konwencja dopuszcza łodzie:
- wiosłowe,
- żaglowe,
- wiosłowo-żaglowe,
- z ręcznym napędem śruby.
- motorowe.
Łodzie 60-100 osobowe muszą mieć ręczny napęd śruby lub motorowy a zabierające ponad 100 osób
napęd motorowy. Najczęstszym rodzajem napędu jest napęd śrubowy, chociaż jeszcze do niedawna
wyposażenie wiosłowo- żaglowe stanowiło obowiązkowe wyposażenie łodzi ratunkowych.
Ożaglowanie – typu rejkowego, maszt osadzony przy jednej z ław poprzecznych, osadzony w
gnieździe na stępce i zamocowany jarzmem przy ławie. Wiosła – na okrężnicy instaluje się gniazda do
dulek dla wioseł. Łodzie do 8,5 m mają co najmniej 6 dulek, większe 8. Śruba – ruch dźwigni od
siebie do siebie, przez przekładnię uzyskujemy ruch obrotowy śruby pozwalający na osiągnięcie
prędkości ok. 4 węzłów.
Motorowe – wyposażone są w wysokoprężny silnik spalinowy:
- umieszczony w bryzgoszczelnej osłonie do wysokości górnych ław,
- ogrodzony wraz ze zbiornikiem paliwa od pozostałej przestrzeni,
- posiadający przekładnię nawrotną, umożliwiającą ruch wprzód i wstecz,
- uruchamiany ręcznie (rozruch elektryczny wyłącznie jako zapasowy), w czasie krótszym niż 1
min,
- rozruch możliwy przy temp. -15ºC dla statków ze wzmocnieniami przeciwlodowymi i -5ºC dla
innych,

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
53
- zapas paliwa powinien wystarczyć na 24 h pływania w pełni obciążonej łodzi z prędkością 6 w
(statki pasażerskie i zbiornikowce) lub 4 w inne statki, czyli, odpowiednio, łódź może przebyć 140
Mm i 95 Mm.
Na statku musi występować co najmniej jedna łódź motorowa (do holowania).
Radiostacja – stała musi być zainstalowana na statkach pasażerskich (jedna na statkach powyżej 199
pasażerów, dwie na statkach powyżej 1500 pasażerów), w przypadku braku łodzi ze stałą radiostacją
na statku musi znajdować się przenośny aparat radiowy odpowiadający wymaganiom konwencji (w
rozkładzie alarmowym jest określona osoba, która musi go przenieść).
Każda łódź motorowa jest wyposażona w reflektor.
Literatura
1. Międzynarodowa konwencja o bezpieczeństwie życia na morzu SOLAS, IMO 1974
2. Orszulok W., Wiewiórski S. – Wyposażenie pokładowe statku handlowego

Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
54
Wykaz literatury podstawowej i uzupełniającej
Wykaz literatury podstawowej do wykładów
1. Dudziak J.: Teoria okrętu, Gdańsk 1988.
2. Pacześniak J.: Projektowanie okrętów. Cz. 3, Specyficzne cechy różnych odmian morskich
statków handlowych. Gdańsk 1980.
3. Pacześniak J.: Projektowanie okrętów. Cz. 2, Gdańsk 1976.
4. Pacześniak J.: Projektowanie okrętów. Cz. 1, Gdańsk 1977.
5. Szozda Z. Stateczność statku morskiego, Szczecin 2002 r.
6. Litwi ński Z.: Techniczne zabezpieczenia okrętów. Szczecin 1988.
7. Wełnicki W.: Mechanika Ruchu Okrętu. Skrypt PG,Gdańsk 1989.
8. Wełnicki W.: Sterowność Okrętu. PWN, Warszawa 1966.
9. Konwencja STCW’95,
10. Konwencja SOLAS,
11. Orszulok W., Wiewiórski S. – Wyposażenie pokładowe statku handlowego,
12. Urbański P.: Siłownie okrętowe,
13. Vademecum nawigatora,
Wykaz literatury uzupełniającej do wykładów
Strony internetowe:
14. www. gl-group.com
15. www.prs.gda.pl
16. www.dnv.com
17. www.eagle.org
18. www.imo.org