AUTOREFERAT ROZPRAWY DOKTORSKIEJ...wskazania i wyniki pomiarów ze stanowiskiem profesjonalnym firmy...
18
POLITECHNIKA ŚLĄSKA w Gliwicach Wydział Automatyki, Elektroniki i Informatyki AUTOREFERAT ROZPRAWY DOKTORSKIEJ Cechy metrologiczne i zastosowanie stanowiska do badania charakterystyk napędów energoelektronicznych mgr inż. Ryszard Janas Rozprawa doktorska napisana pod kierunkiem dr hab. inż. Jerzego Kasprzyka, prof. nadzw. w Politechnice Śląskiej GLIWICE 2016
Transcript of AUTOREFERAT ROZPRAWY DOKTORSKIEJ...wskazania i wyniki pomiarów ze stanowiskiem profesjonalnym firmy...
POLITECHNIKA ŚLĄSKA
w Gliwicach
Wydział Automatyki, Elektroniki i Informatyki
AUTOREFERAT ROZPRAWY DOKTORSKIEJ
Cechy metrologiczne i zastosowanie stanowiska
do badania charakterystyk
napędów energoelektronicznych
mgr inż. Ryszard Janas
Rozprawa doktorska napisana pod kierunkiem dr hab. inż. Jerzego Kasprzyka, prof. nadzw. w Politechnice Śląskiej
GLIWICE 2016
Spis treści 1. Wstęp .............................................................................................................................. 3
1.1. Przedstawienie problemu ..................................................................................... 3
1.2. Zakres pracy .......................................................................................................... 4
1.3. Teza pracy ............................................................................................................. 5
1.4. Układ pracy ........................................................................................................... 5
2. Dotychczasowe metody pomiaru momentu obrotowego ........................................... 6
3. Potrzeby pomiarowe w odniesieniu do napędów energoelektronicznych, stanowisko pomiarowe...................................................................................................................... 7
4. Przeprowadzone pomiary .............................................................................................. 9
5. Niepewność pomiarów prowadzonych na stanowisku ................................................ 12
6. Wnioski końcowe .......................................................................................................... 14
7. Publikacje i osiągnięcia Autora ..................................................................................... 16
1. Wstęp
1.1. Przedstawienie problemu
Obecnie stosowane napędy elektryczne są głównie napędami energoelektronicznymi.
Zarówno w napędach prądu stałego, jak i przemiennego do historii odeszły układy rozrucho-
we i sterujące oparte na rezystorach (w tym wodnych) i przełączaniu uzwojeń, jak również
będące klasyką dla silników asynchronicznych przełączniki gwiazda – trójkąt. Coraz rzadziej
także stosowane są silniki pierścieniowe. Rozruchu i sterowania pracą napędu dokonuje się
za pomocą układów energoelektronicznych, opartych o podzespoły mocy, układy sterujące i
technikę mikroprocesorową. W procesie projektowania, wdrażania, programowania i konfi-
guracji konieczne jest stosowanie innych niż dotychczas metod pomiaru charakterystyk, w
szczególności momentu obrotowego w całej rozpiętości prędkości obrotowej podczas napę-
du i hamowania, jak również przy nieruchomym wale silnika. Zmiany w tym zakresie nie na-
dążają niestety za postępem techniki napędowej. Stosowane zwykle do pomiaru charaktery-
styk silników klasyczne stanowiska wyposażone w hamulce taśmowe lub szczękowe wszel-
kich typów nie spełniają tego zadania, nie jest możliwe za ich pomocą wykonanie niezbęd-
nych pomiarów parametrów i wyznaczenie odpowiednich zależności. Również stosowane w
tym zakresie jako hamulce prądnice prądu stałego lub inne maszyny elektryczne nie umożli-
wiają dokonania niezbędnych pomiarów. Niemożliwe jest bowiem przy ich pomocy badanie
dynamiki napędu, jak również jego parametrów przy małych prędkościach obrotowych, przy
częstotliwości napięcia zasilającego rzędu 1 Hz, a także momentu hamowania nieruchomego
wału. Także coraz częściej stosowane systemy oparte o maszyny elektryczne typu serwo,
posiadające możliwość zaprogramowania wszelkich charakterystyk obciążeń, pracujące jako
hamulce w pełnym zakresie prędkości obrotowej (już od 0 obr/min) nie w pełni spełniają
swoje zadanie. Wykonują one bowiem najczęściej badania w cyklu całkowicie automatycz-
nym, przez co zmniejszone zostają wartości dydaktyczne i poznawcze dotyczące pomiaru.
Przedstawione stanowisko, zaprojektowane przez Autora, składające się z trzech ze-
społów – modułów: hamulca - pompy hydraulicznej, koła zamachowego oraz bębna cięgno-
wego z obciążnikami, jest systemem pomiarowym w pełni umożliwiającym przeprowadzenie
opisanych wyżej pomiarów charakterystyk. Moduły te mogą pracować oddzielnie lub razem,
co umożliwia pomiar złożonych sytuacji napędowych. Przy prowadzonych jednocześnie po-
miarach prądu i napięcia, jak również cos φ, mocy czynnej i biernej w obwodzie zasilającym
przekształtnik lub przemiennik możliwe jest pełne badanie wszystkich parametrów napędu w
przeciwieństwie do dotychczas stosowanych metod.
W rozprawie została przedstawiona budowa stanowiska, jego parametry i zastosowa-
nie, jak również porównanie z innymi metodami i stanowiskami pomiarowymi. Wykazana
zostanie jego przydatność do pomiaru wszystkich parametrów współczesnego napędu ener-
goelektronicznego. Opisana zostanie także wartość dydaktyczna stanowiska – cenna przy
kształceniu kadr w technicznych szkołach średnich i wyższych, jak również specjalistycznych
kursach i szkoleniach, np. dla pracowników serwisu napędów.
1.2. Zakres pracy
Przedmiotem pracy jest przedstawienie zastosowania i cech metrologicznych zaprojek-
towanego przez Autora stanowiska do badania charakterystyk napędów energoelektronicz-
nych małej mocy. Stanowisko to składa się z trzech zespołów, niezbędnych do przeprowa-
dzenia kompleksowego badania napędów:
Hamulca hydraulicznego wychylnego – podstawowej części stanowiska - stosowa-nego do pomiaru charakterystyki mechanicznej silników elektrycznych dowolnego typu i rodzaju,
Koła zamachowego stosowanego do pomiaru dynamicznych właściwości napędo-wych silnika, przy założeniu zredukowania napędzanej maszyny roboczej do obli-czeniowego momentu bezwładności,
Bębna cięgnowego ze zmiennym obciążeniem – stosowanego do badania momentu hamowania zatrzymanego wału silnika każdego rodzaju, momentu obrotowego przy małych prędkościach, jak również charakterystyk przejścia: ruch – bezruch – napęd – hamowanie – zatrzymanie.
Dla wszystkich wyżej wymienionych badań silnika mierzone są:
prędkość obrotowa,
moment obrotowy w ruchu,
moment obrotowy przy małej prędkości obrotowej,
moment hamowania w bezruchu,
czas rozpędzania i hamowania, oraz parametry elektryczne napędu:
wartość prądu silnika,
wartość napięcia silnika,
przebiegi prądu i napięcia na uzwojeniach silnika,
napięcie w obwodzie pośrednim przemiennika,
napięcie i prąd po stronie pierwotnej napędu,
moc czynna pobierana z sieci,
cos φ w obwodzie zasilającym. Prowadzone badania pozwalają na określenie i obliczenie wielu parametrów elektrycznych
napędu jak m.in.:
Dla silników AC:
wymagane podniesienie Umin (przemienniki U/f),
niezbędny poziom hamowania GSB,
częstotliwość przy której następuje włączenie hamowania GSB,
kształt charakterystyki U/f,
częstotliwość robocza,
poziom zabezpieczenia I2t,
sprawności w różnych relacjach i stanach,
sprawności hamulca energoelektronicznego,
parametrów przejścia od stanu zatrzymanego do ruchu (Schneider Electric, 2005),
możliwości odzysku energii. Dla silników DC:
poziom ograniczenia prądu twornika,
napięcie na uzwojeniu wzbudzenia,
napięcie i prąd twornika przy napędzaniu i hamowaniu,
nastawa współczynnika wzmocnienia i czasu całkowania regulatora PI prędkości ob-rotowej,
sprawność napędu,
moc czynna i bierna po stronie pierwotnej.
Przed podjęciem prac nad koncepcją budowy stanowiska przeprowadzona została ana-
liza norm dotyczących prowadzenia pomiaru charakterystyk maszyn elektrycznych. Uwarun-
kowują one sposoby badań maszyn elektrycznych, jak również precyzują niektóre metody
pomiaru, nie opisują one jednak precyzyjnie wszystkich uwarunkowań dotyczących sposobu
ich prowadzenia, umożliwiając tym samym prowadzenie badań w odmienny od tradycyjnego
sposób.
1.3. Teza pracy
Możliwe jest kompleksowe zbadanie przy zastosowaniu opisywanego stanowiska cha-
rakterystyk napędu energoelektronicznego prądu stałego i przemiennego oraz wpływu na
nie parametrów konfiguracyjnych przemiennika lub przekształtnika w zakresie:
przebiegu momentu obrotowego dla całej rozpiętości prędkości obrotowej, jak również dla zatrzymanego wału silnika,
parametrów zasilania po stronie pierwotnej (prąd, napięcie, cos φ) w obwodzie po-średnim dla przemienników AC/AC (napięcie, funkcjonowanie hamulca elektronicz-nego),
parametrów dynamicznych (rozpędzanie, hamowanie, zatrzymanie, utrzymywanie stałej prędkości obrotowej) przy zadanym momencie bezwładności napędzanej ma-szyny oraz momencie oporowym o stałej i zmiennej wartości,
parametrów pracy przerywacza hamulca (choppera) dla przemienników AC/AC.
1.4. Układ pracy
W pracy przedstawiono stanowisko skonstruowane przez Autora, służące do wyzna-
czania charakterystyk mechanicznych silników elektrycznych prądu stałego i przemiennego
zasilanych bezpośrednio z sieci, jak również za pomocą przemienników i przekształtników
energoelektronicznych. Opisano dawne, historyczne metody pomiaru, oraz współczesne,
oparte na zelektronizowanych i skomputeryzowanych stanowiskach pomiarowych. Szczegó-
łowo opisano skonstruowane przez Autora wyposażenie stanowiska do kompleksowych po-
miarów charakterystyk, wyposażonego w unikalny hamulec hydrauliczny zawieszony bezpo-
średnio na osi silnika badanego, jak również koło zamachowe do badania charakterystyk dy-
namicznych oraz zestaw do badania napędu przy małych prędkościach obrotowych i nieru-
chomym wale silnika. Przedstawiono potrzeby pomiarowe dotyczące napędów energoelek-
tronicznych, techniki i sposoby, jak również cel pomiaru prądów, napięć, współczynnika mo-
cy, mocy czynnej, biernej i pozornej oraz sprawności w różnych relacjach w celu badania
wpływu na nie parametrów konfiguracyjnych przemiennika lub przekształtnika. Porównano
wskazania i wyniki pomiarów ze stanowiskiem profesjonalnym firmy Lucas Nulle (Niemcy),
opisano zastosowania dydaktyczne i badawcze. Odniesiono proponowany sposób prowa-
dzenia pomiaru charakterystyk do dydaktyki wskazując wyższość prowadzenia procesu dy-
daktycznego za pomocą metod, stanowisk i sposobów o niższym stopniu symulacji nad wy-
soko symulowanymi, wykonującymi automatycznie kompleksowe pomiary, przy mniejszym
jednak udziale ucznia/studenta, którego uwaga jest skupiona na obsłudze systemu, mniej zaś
na prowadzeniu pomiaru i rozumieniu zjawisk zachodzących na stanowisku.
2. Dotychczasowe metody pomiaru momentu obrotowego
Od czasu powstania pierwszych silników pojawiła się potrzeba pomiaru parametrów je
charakteryzujących, mogących służyć do porównania ich między sobą, jak również odnieść
ich zdolności napędowe do ludzi i zwierząt. Jako jeden z pierwszych mierzony był moment
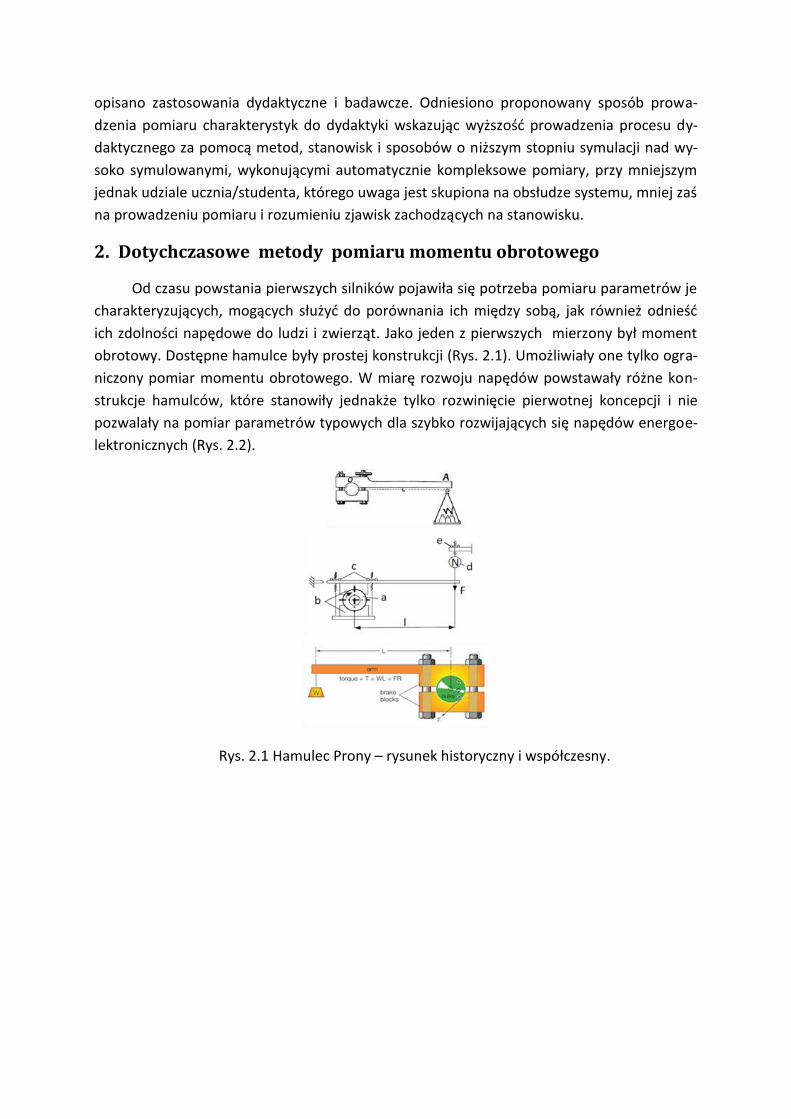
obrotowy. Dostępne hamulce były prostej konstrukcji (Rys. 2.1). Umożliwiały one tylko ogra-
niczony pomiar momentu obrotowego. W miarę rozwoju napędów powstawały różne kon-
strukcje hamulców, które stanowiły jednakże tylko rozwinięcie pierwotnej koncepcji i nie
pozwalały na pomiar parametrów typowych dla szybko rozwijających się napędów energoe-
lektronicznych (Rys. 2.2).
Rys. 2.1 Hamulec Prony – rysunek historyczny i współczesny.
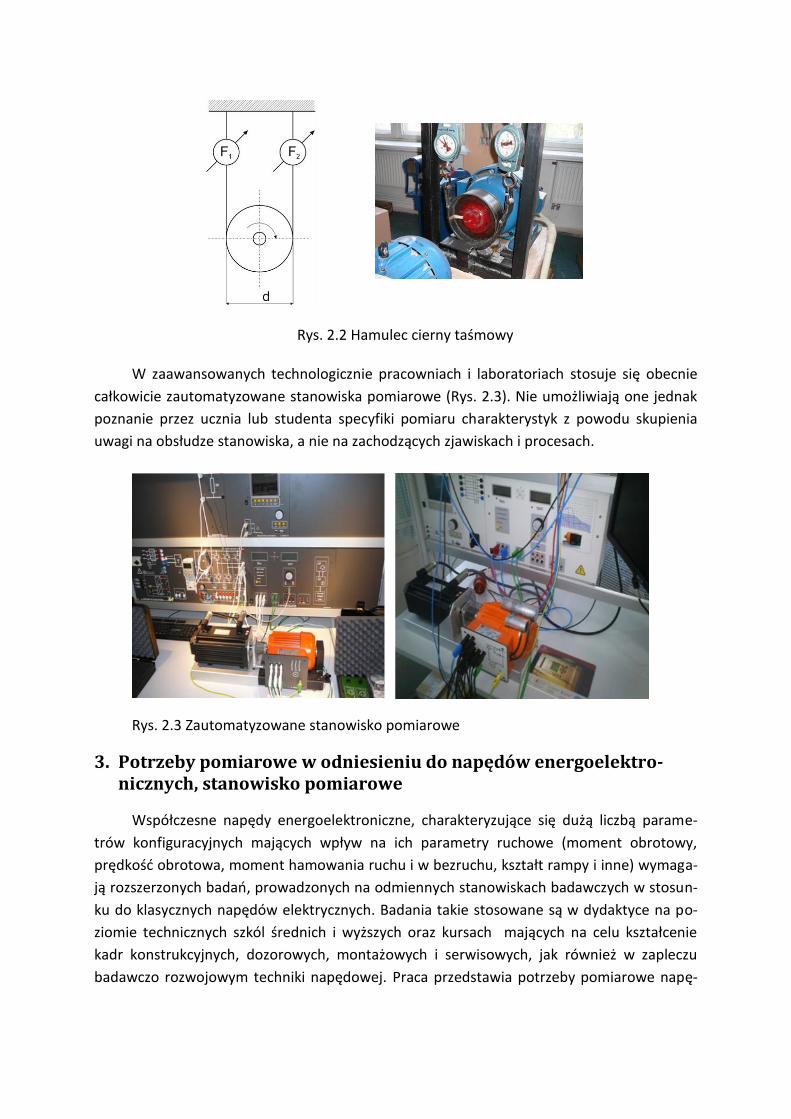
Rys. 2.2 Hamulec cierny taśmowy
W zaawansowanych technologicznie pracowniach i laboratoriach stosuje się obecnie
całkowicie zautomatyzowane stanowiska pomiarowe (Rys. 2.3). Nie umożliwiają one jednak
poznanie przez ucznia lub studenta specyfiki pomiaru charakterystyk z powodu skupienia
uwagi na obsłudze stanowiska, a nie na zachodzących zjawiskach i procesach.
Rys. 2.3 Zautomatyzowane stanowisko pomiarowe
3. Potrzeby pomiarowe w odniesieniu do napędów energoelektro-nicznych, stanowisko pomiarowe
Współczesne napędy energoelektroniczne, charakteryzujące się dużą liczbą parame-
trów konfiguracyjnych mających wpływ na ich parametry ruchowe (moment obrotowy,
prędkość obrotowa, moment hamowania ruchu i w bezruchu, kształt rampy i inne) wymaga-
ją rozszerzonych badań, prowadzonych na odmiennych stanowiskach badawczych w stosun-
ku do klasycznych napędów elektrycznych. Badania takie stosowane są w dydaktyce na po-
ziomie technicznych szkól średnich i wyższych oraz kursach mających na celu kształcenie
kadr konstrukcyjnych, dozorowych, montażowych i serwisowych, jak również w zapleczu
badawczo rozwojowym techniki napędowej. Praca przedstawia potrzeby pomiarowe napę-
dów diametralnie różne od możliwych do pomiaru przy użyciu prostych hamulców w odnie-
sieniu do:
przemienników skalarnych i wektorowych AC/AC,
przekształtników AC/DC, w zakresie:
pomiaru charakterystyki mechanicznej,
pomiaru zdolności napędu elektrycznego do rozpędzenia i hamowania maszyny ro-boczej,
pomiaru momentu hamowania zatrzymanego wału silnika,
pomiaru charakterystyki przejścia napędu ze stanu zatrzymanego do ruchu,
pomiaru funkcjonowania regulatora PI prędkości obrotowej,
pomiaru parametrów elektrycznych przemienników i przekształtników,
pomiaru parametrów sieci zasilającej.
Stanowisko pomiarowe
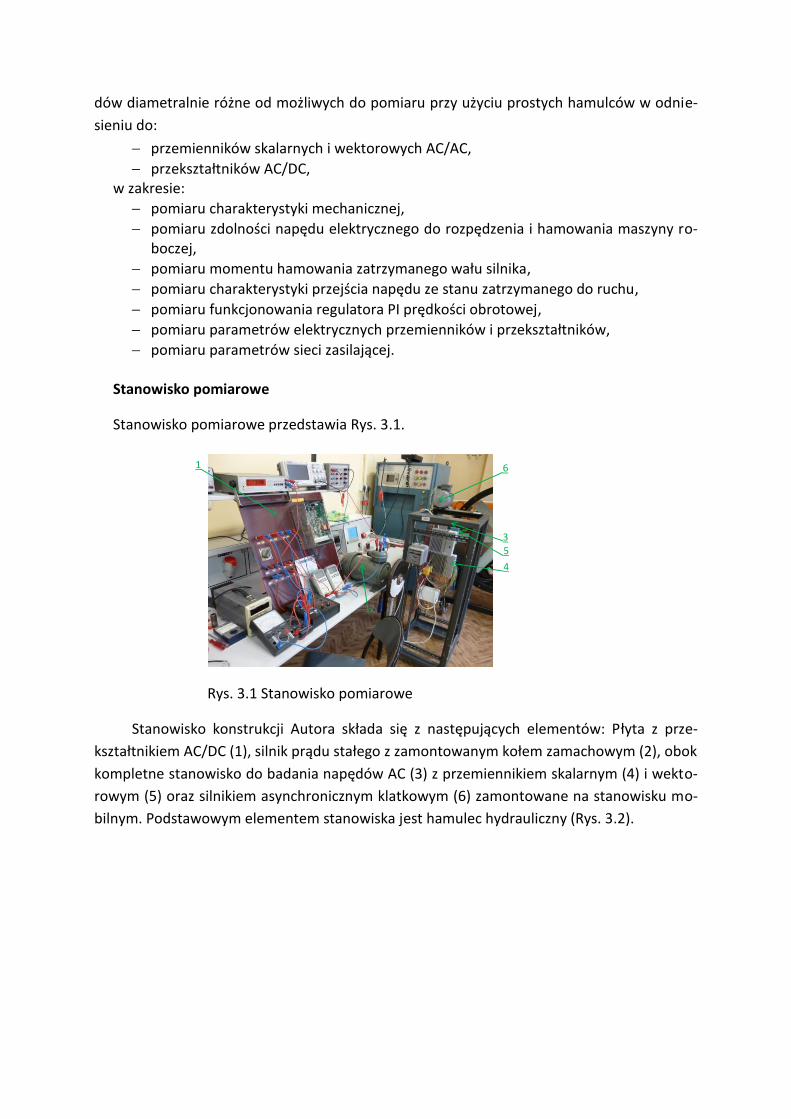
Stanowisko pomiarowe przedstawia Rys. 3.1.
Rys. 3.1 Stanowisko pomiarowe
Stanowisko konstrukcji Autora składa się z następujących elementów: Płyta z prze-
kształtnikiem AC/DC (1), silnik prądu stałego z zamontowanym kołem zamachowym (2), obok
kompletne stanowisko do badania napędów AC (3) z przemiennikiem skalarnym (4) i wekto-
rowym (5) oraz silnikiem asynchronicznym klatkowym (6) zamontowane na stanowisku mo-
bilnym. Podstawowym elementem stanowiska jest hamulec hydrauliczny (Rys. 3.2).
1
2
3
4
5
6
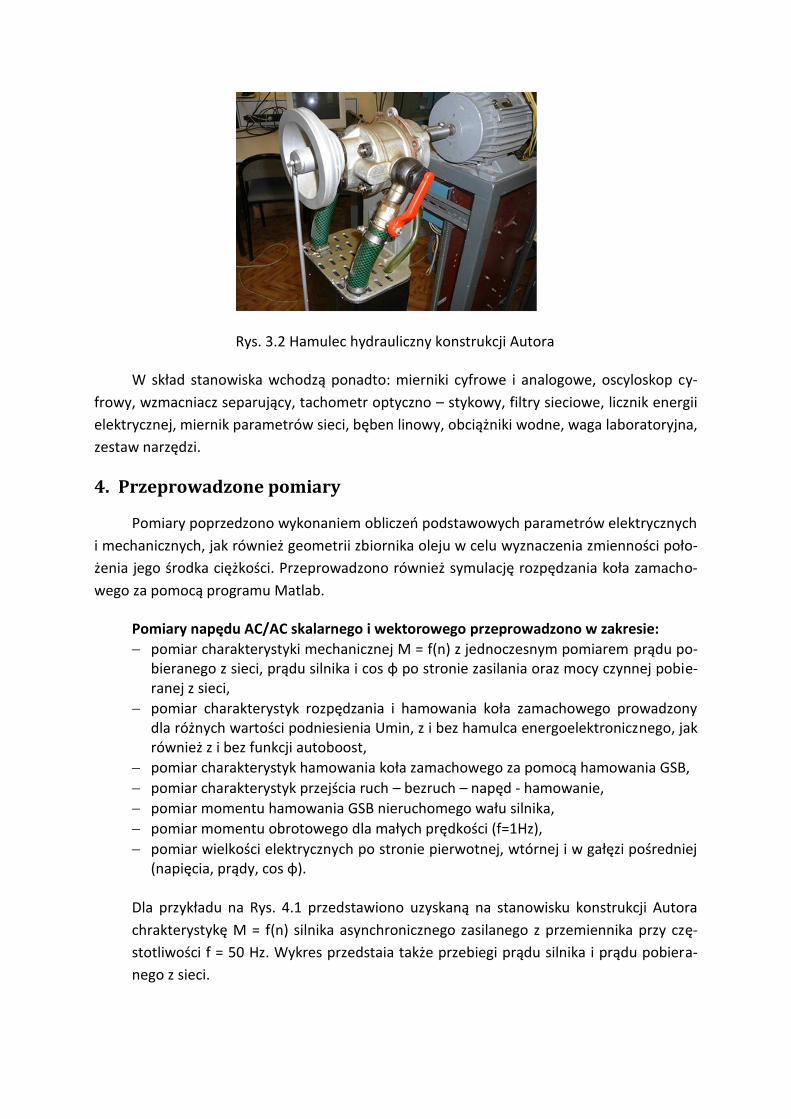
Rys. 3.2 Hamulec hydrauliczny konstrukcji Autora
W skład stanowiska wchodzą ponadto: mierniki cyfrowe i analogowe, oscyloskop cy-
frowy, wzmacniacz separujący, tachometr optyczno – stykowy, filtry sieciowe, licznik energii
elektrycznej, miernik parametrów sieci, bęben linowy, obciążniki wodne, waga laboratoryjna,
zestaw narzędzi.
4. Przeprowadzone pomiary
Pomiary poprzedzono wykonaniem obliczeń podstawowych parametrów elektrycznych
i mechanicznych, jak również geometrii zbiornika oleju w celu wyznaczenia zmienności poło-
żenia jego środka ciężkości. Przeprowadzono również symulację rozpędzania koła zamacho-
wego za pomocą programu Matlab.
Pomiary napędu AC/AC skalarnego i wektorowego przeprowadzono w zakresie:
pomiar charakterystyki mechanicznej M = f(n) z jednoczesnym pomiarem prądu po-bieranego z sieci, prądu silnika i cos φ po stronie zasilania oraz mocy czynnej pobie-ranej z sieci,
pomiar charakterystyk rozpędzania i hamowania koła zamachowego prowadzony dla różnych wartości podniesienia Umin, z i bez hamulca energoelektronicznego, jak również z i bez funkcji autoboost,
pomiar charakterystyk hamowania koła zamachowego za pomocą hamowania GSB,
pomiar charakterystyk przejścia ruch – bezruch – napęd - hamowanie,
pomiar momentu hamowania GSB nieruchomego wału silnika,
pomiar momentu obrotowego dla małych prędkości (f=1Hz),
pomiar wielkości elektrycznych po stronie pierwotnej, wtórnej i w gałęzi pośredniej (napięcia, prądy, cos φ).
Dla przykładu na Rys. 4.1 przedstawiono uzyskaną na stanowisku konstrukcji Autora
chrakterystykę M = f(n) silnika asynchronicznego zasilanego z przemiennika przy czę-
stotliwości f = 50 Hz. Wykres przedstaia także przebiegi prądu silnika i prądu pobiera-
nego z sieci.
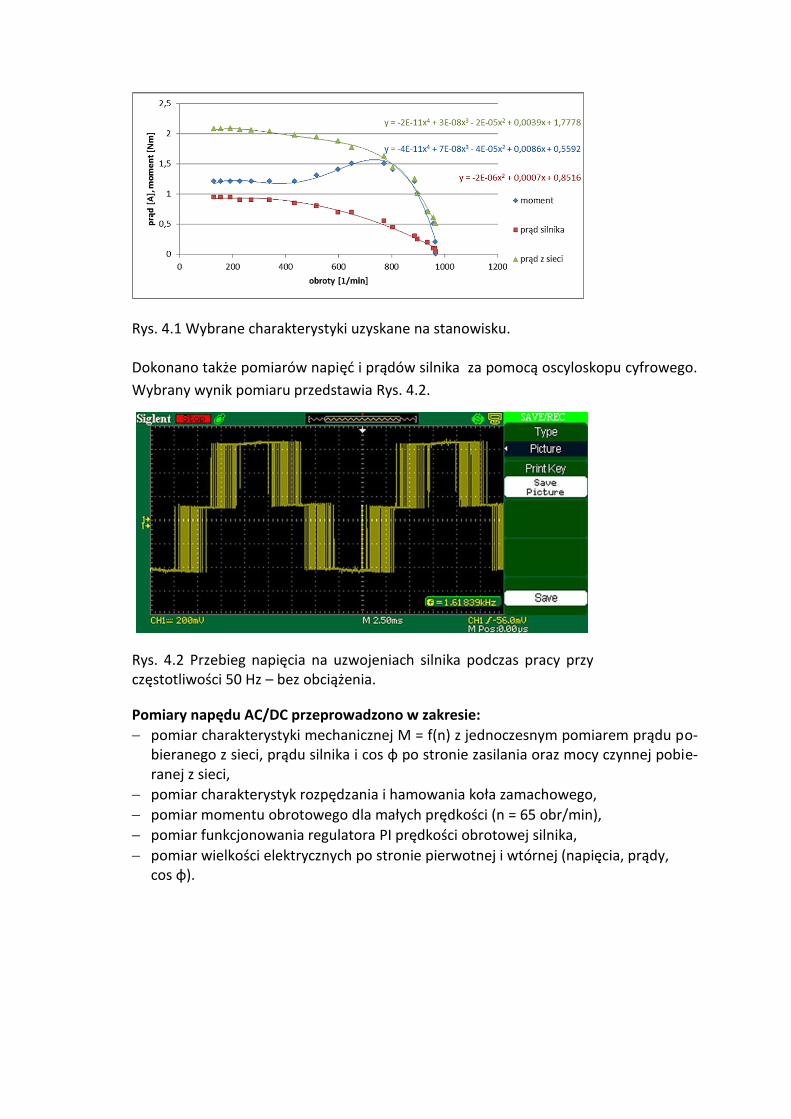
Rys. 4.1 Wybrane charakterystyki uzyskane na stanowisku.
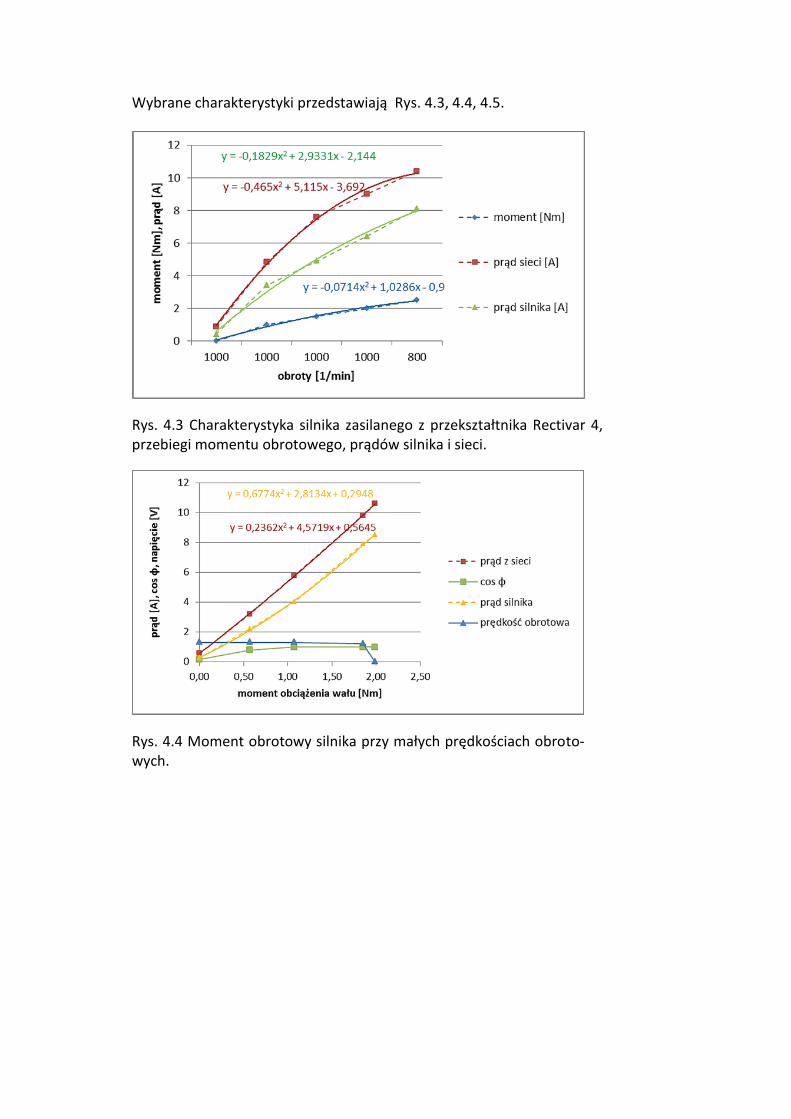
Dokonano także pomiarów napięć i prądów silnika za pomocą oscyloskopu cyfrowego.
Wybrany wynik pomiaru przedstawia Rys. 4.2.
Rys. 4.2 Przebieg napięcia na uzwojeniach silnika podczas pracy przy częstotliwości 50 Hz – bez obciążenia.
Pomiary napędu AC/DC przeprowadzono w zakresie:
pomiar charakterystyki mechanicznej M = f(n) z jednoczesnym pomiarem prądu po-bieranego z sieci, prądu silnika i cos φ po stronie zasilania oraz mocy czynnej pobie-ranej z sieci,
pomiar charakterystyk rozpędzania i hamowania koła zamachowego,
pomiar momentu obrotowego dla małych prędkości (n = 65 obr/min),
pomiar funkcjonowania regulatora PI prędkości obrotowej silnika,
pomiar wielkości elektrycznych po stronie pierwotnej i wtórnej (napięcia, prądy, cos φ).
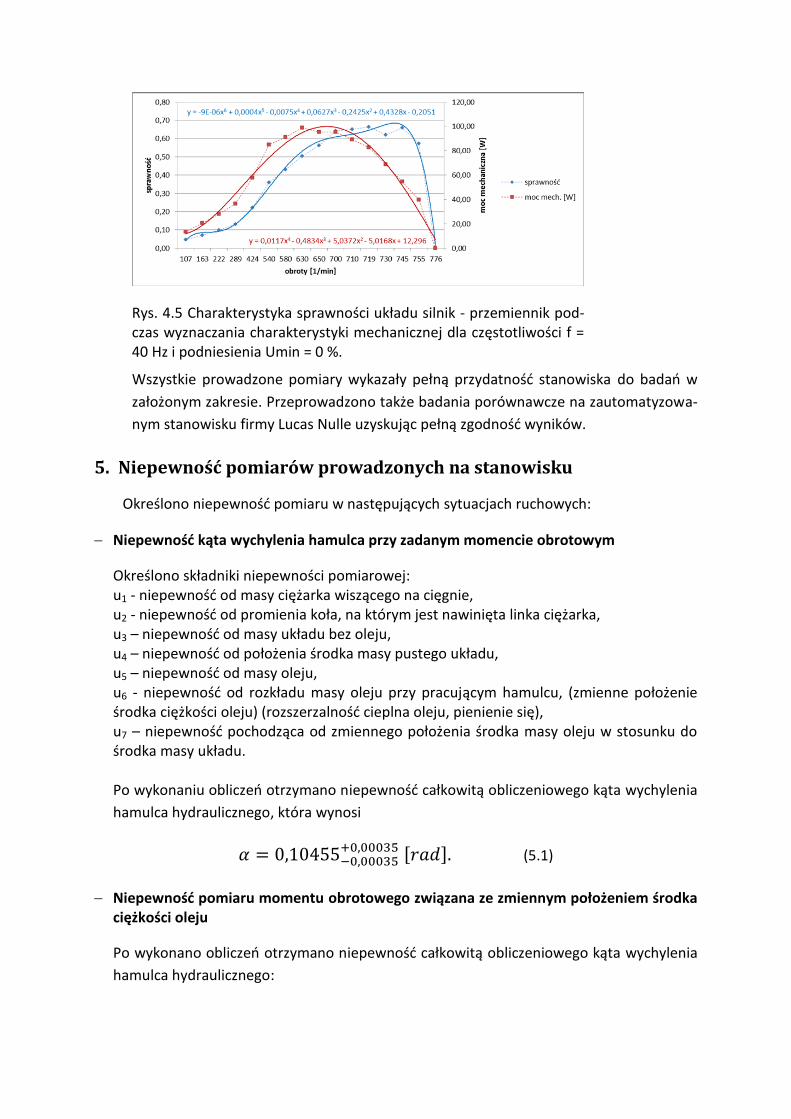
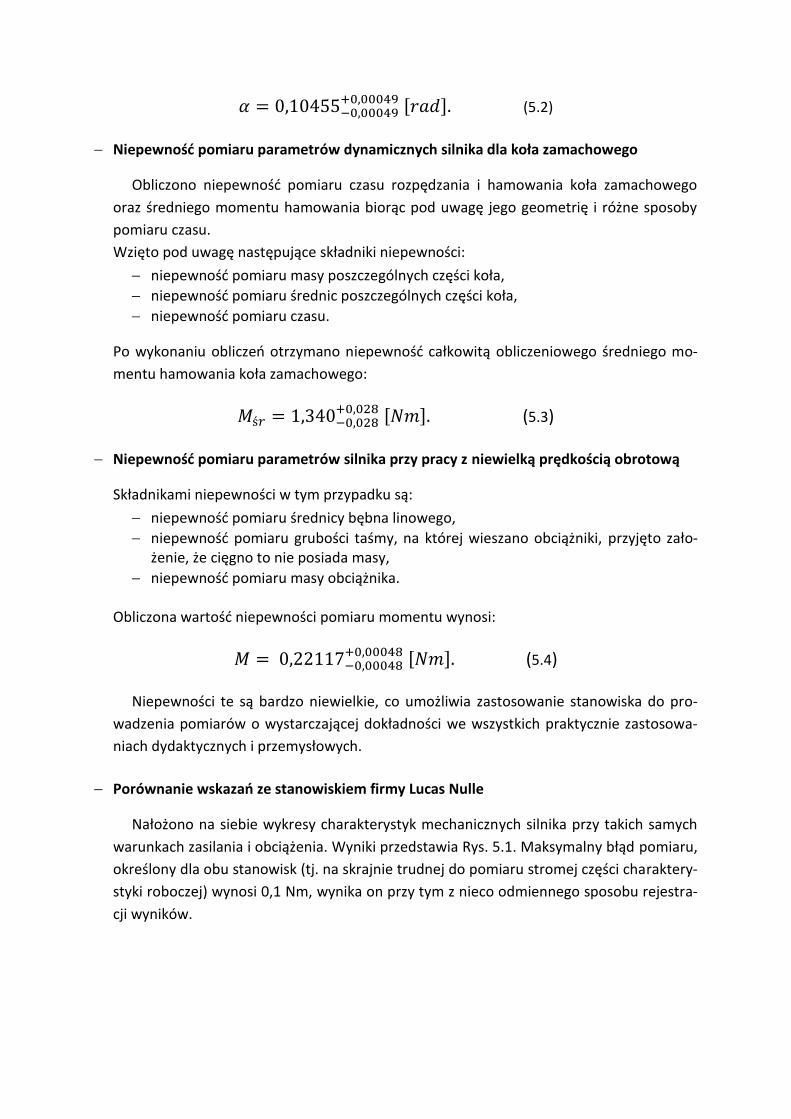
Wybrane charakterystyki przedstawiają Rys. 4.3, 4.4, 4.5.
Rys. 4.3 Charakterystyka silnika zasilanego z przekształtnika Rectivar 4, przebiegi momentu obrotowego, prądów silnika i sieci.
Rys. 4.4 Moment obrotowy silnika przy małych prędkościach obroto-wych.
Rys. 4.5 Charakterystyka sprawności układu silnik - przemiennik pod-czas wyznaczania charakterystyki mechanicznej dla częstotliwości f = 40 Hz i podniesienia Umin = 0 %.
Wszystkie prowadzone pomiary wykazały pełną przydatność stanowiska do badań w
założonym zakresie. Przeprowadzono także badania porównawcze na zautomatyzowa-
nym stanowisku firmy Lucas Nulle uzyskując pełną zgodność wyników.
5. Niepewność pomiarów prowadzonych na stanowisku
Określono niepewność pomiaru w następujących sytuacjach ruchowych:
Niepewność kąta wychylenia hamulca przy zadanym momencie obrotowym
Określono składniki niepewności pomiarowej: u1 - niepewność od masy ciężarka wiszącego na cięgnie, u2 - niepewność od promienia koła, na którym jest nawinięta linka ciężarka, u3 – niepewność od masy układu bez oleju, u4 – niepewność od położenia środka masy pustego układu, u5 – niepewność od masy oleju, u6 - niepewność od rozkładu masy oleju przy pracującym hamulcu, (zmienne położenie środka ciężkości oleju) (rozszerzalność cieplna oleju, pienienie się), u7 – niepewność pochodząca od zmiennego położenia środka masy oleju w stosunku do środka masy układu.
Po wykonaniu obliczeń otrzymano niepewność całkowitą obliczeniowego kąta wychylenia
hamulca hydraulicznego, która wynosi
𝛼 = 0,10455−0,00035+0,00035 [𝑟𝑎𝑑]. (5.1)
Niepewność pomiaru momentu obrotowego związana ze zmiennym położeniem środka ciężkości oleju
Po wykonano obliczeń otrzymano niepewność całkowitą obliczeniowego kąta wychylenia
hamulca hydraulicznego:
𝛼 = 0,10455−0,00049+0,00049 [𝑟𝑎𝑑]. (5.2)
Niepewność pomiaru parametrów dynamicznych silnika dla koła zamachowego
Obliczono niepewność pomiaru czasu rozpędzania i hamowania koła zamachowego
oraz średniego momentu hamowania biorąc pod uwagę jego geometrię i różne sposoby
pomiaru czasu.
Wzięto pod uwagę następujące składniki niepewności:
niepewność pomiaru masy poszczególnych części koła,
niepewność pomiaru średnic poszczególnych części koła,
niepewność pomiaru czasu.
Po wykonaniu obliczeń otrzymano niepewność całkowitą obliczeniowego średniego mo-
mentu hamowania koła zamachowego:
𝑀ś𝑟 = 1,340−0,028+0,028 [𝑁𝑚]. (5.3)
Niepewność pomiaru parametrów silnika przy pracy z niewielką prędkością obrotową
Składnikami niepewności w tym przypadku są:
niepewność pomiaru średnicy bębna linowego,
niepewność pomiaru grubości taśmy, na której wieszano obciążniki, przyjęto zało-żenie, że cięgno to nie posiada masy,
niepewność pomiaru masy obciążnika.
Obliczona wartość niepewności pomiaru momentu wynosi:
𝑀 = 0,22117−0,00048+0,00048 [𝑁𝑚]. (5.4)
Niepewności te są bardzo niewielkie, co umożliwia zastosowanie stanowiska do pro-
wadzenia pomiarów o wystarczającej dokładności we wszystkich praktycznie zastosowa-
niach dydaktycznych i przemysłowych.
Porównanie wskazań ze stanowiskiem firmy Lucas Nulle
Nałożono na siebie wykresy charakterystyk mechanicznych silnika przy takich samych
warunkach zasilania i obciążenia. Wyniki przedstawia Rys. 5.1. Maksymalny błąd pomiaru,
określony dla obu stanowisk (tj. na skrajnie trudnej do pomiaru stromej części charaktery-
styki roboczej) wynosi 0,1 Nm, wynika on przy tym z nieco odmiennego sposobu rejestra-
cji wyników.
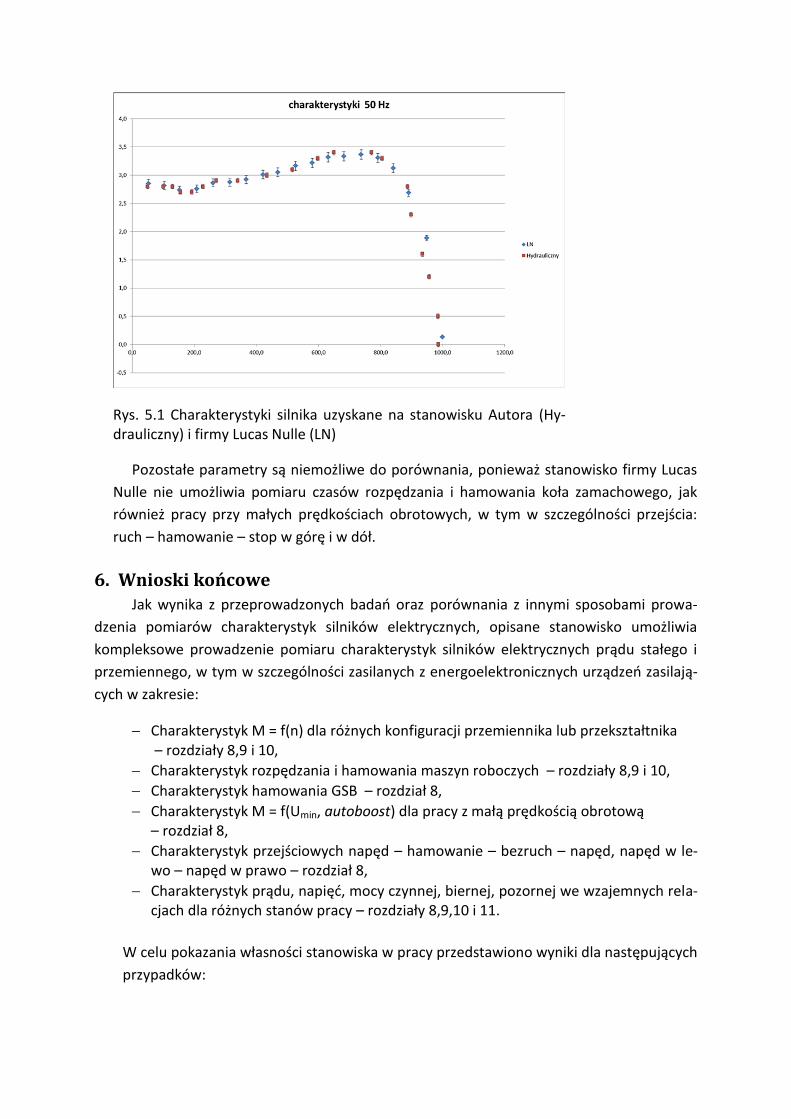
Rys. 5.1 Charakterystyki silnika uzyskane na stanowisku Autora (Hy-drauliczny) i firmy Lucas Nulle (LN)
Pozostałe parametry są niemożliwe do porównania, ponieważ stanowisko firmy Lucas
Nulle nie umożliwia pomiaru czasów rozpędzania i hamowania koła zamachowego, jak
również pracy przy małych prędkościach obrotowych, w tym w szczególności przejścia:
ruch – hamowanie – stop w górę i w dół.
6. Wnioski końcowe
Jak wynika z przeprowadzonych badań oraz porównania z innymi sposobami prowa-
dzenia pomiarów charakterystyk silników elektrycznych, opisane stanowisko umożliwia
kompleksowe prowadzenie pomiaru charakterystyk silników elektrycznych prądu stałego i
przemiennego, w tym w szczególności zasilanych z energoelektronicznych urządzeń zasilają-
cych w zakresie:
Charakterystyk M = f(n) dla różnych konfiguracji przemiennika lub przekształtnika – rozdziały 8,9 i 10,
Charakterystyk rozpędzania i hamowania maszyn roboczych – rozdziały 8,9 i 10,
Charakterystyk hamowania GSB – rozdział 8,
Charakterystyk M = f(Umin, autoboost) dla pracy z małą prędkością obrotową – rozdział 8,
Charakterystyk przejściowych napęd – hamowanie – bezruch – napęd, napęd w le-wo – napęd w prawo – rozdział 8,
Charakterystyk prądu, napięć, mocy czynnej, biernej, pozornej we wzajemnych rela-cjach dla różnych stanów pracy – rozdziały 8,9,10 i 11.
W celu pokazania własności stanowiska w pracy przedstawiono wyniki dla następujących
przypadków:
1. Silnik klatkowy zasilany z przemiennika skalarnego AC/AC.
Przeprowadzono pełne badania napędu z silnikiem asynchronicznym klatkowym zasi-lanym z przemiennika skalarnego Lumel RN 8202E określając charakterystyki we wszystkich stanach jego pracy z wyjątkiem obciążenia momentem o zmiennej cyklicz-nie wartości, występującym np. w napędzie sprężarek tłokowych, szczególnie o małej ilości cylindrów
2. Silnik klatkowy zasilany z przemiennika wektorowego AC/AC. Podczas badań napędu z silnikiem asynchronicznym klatkowym zasilanym z prze-miennika wektorowego Eurotherm 650V, określono jego parametry w zastosowa-niach napędowych jak w p. 9, wskazano różnice w możliwościach i własnościach na-pędowych w odniesieniu do przemiennika skalarnego.
3. Silnik prądu stałego zasilany z przekształtnika AC/DC. Badano pracę napędu prądu stałego z czterokwadrantowym przekształtnikiem Rec-tivar 4, dokonując pomiaru charakterystyki mechanicznej, pracy regulatora PI, zdol-ności do rozpędzania i hamowania koła zamachowego oraz pracy z mała prędkością obrotową przy dodatnim i ujemnym momencie obciążającym.
4. Przemienniki AC/AC i przekształtniki AC/DC. Wykazano, że za pomocą stanowiska możliwe jest zmierzenie ważnych w technice napędowej parametrów elektrycznych napędu w każdym z opisywanych jego zasto-sowań, mianowicie mocy czynnej, biernej i pozornej, cos φ w różnych stanach pracy, jak również sprawności odniesionej do mocy pobieranej z sieci, poboru energii w róż-nych konfiguracjach, w tym podczas hamowania koła zamachowego, podczas którego prąd pobierany z sieci dąży do zera. Badano przebiegi napięcia w obwodzie pośred-nim przemiennika podczas napędzania i hamowania wykazując rolę przerywacza ha-mowania – tzw. choppera.
5. Stanowisko firmy Lucas Nulle. Poprzez porównanie ze specjalistycznym stanowiskiem firmy Lucas Nulle wykazano, że charakterystyki napędu, w tym szczególnie charakterystyka mechaniczna, jest niemalże identyczna z otrzymaną na stanowisku skonstruowanym przez Autora. Po-zostałe parametry są niemożliwe do porównania, ponieważ stanowisko firmy Lucas Nulle nie umożliwia pomiaru czasów rozpędzania i hamowania koła zamachowego, jak również pracy przy małych prędkościach obrotowych, w tym w szczególności przejścia: ruch – hamowanie – stop w górę i w dół.
Określono także niepewność pomiarową dla poszczególnych elementów stanowiska, w
tym w szczególności dla hamulca hydraulicznego, posiadającego wiele zmieniających się pa-
rametrów mających wpływ na końcowy wynik pomiaru momentu obrotowego.
Z dydaktycznego i badawczego punktu widzenia stanowisko umożliwia praktyczne po-
znanie wszystkich parametrów przemienników i przekształtników oraz ich wpływu na pracę
napędu. Zastosowane sposoby przeprowadzenia pomiarów wypełniają lukę w dydaktyce,
jaka istnieje pomiędzy dawnymi, klasycznymi technikami pomiarowymi stosowanymi do ba-
dania napędów, a zautomatyzowanymi stanowiskami, które pozwalają na kompleksowe ba-
dania napędu w zakresie wszystkich parametrów. Automatyzacja stanowisk powoduje, że
uczeń / student podczas tych badań nie ma bezpośredniego wpływu na ich przebieg – jest
prowadzony „za rękę” przez sterujący stanowiskiem system, a co za tym idzie, nie nabywa
umiejętności wielokierunkowej analizy wpływu poszczególnych parametrów na charaktery-
stykę silnika. Opisywane stanowisko wypełnia tę lukę, ćwiczący poprzez bezpośredni wpływ
na jego pracę nabywają umiejętności analizy wpływu poszczególnych parametrów, co po-
zwala na lepsze zrozumienie i utrwalenie wielu zależności. Pozwala to na pełne zrozumienie
przez ucznia/studenta procesu konfiguracji napędów energoelektronicznych oraz wykształ-
cenie umiejętności doboru parametrów napędu podczas prac związanych z uruchamianiem
bądź naprawą układów napędowych. Dodatkową zaletą opisanego rozwiązania jest prosta
budowa poszczególnych elementów, pozwalająca na bezpośrednią obserwację zachodzących
procesów.
7. Publikacje i osiągnięcia Autora
Wykształcenie:
Politechnika Wrocławska we Wrocławiu, Wydział Mechaniczny, kierunek technologiczny, specjalność: obrabiarki, urządzenia wytwórcze i procesy technologiczne. Wrocław 1980r.
Praca końcowa: ,,Wpływ amplitudy i częstotliwości drgań narzędzia na zużycie ostrza w skrawaniu wibracyjnym z drganiami w kierunku promienia przedmiotu obrabianego” Egzamin końcowy – ocena bardzo dobry opiekun naukowy: dr inż. Bronisław Choroszy tytuł: mgr inż. mechanik
Wykształcenie uzupełniające:
1994-1995 studia podyplomowe – Uniwersytet Wrocławski w zakresie informatyki,
1999 drugi stopień specjalizacji zawodowej w zakresie nauczania przedmiotów me-
chanicznych,
30.08.2011 stopień nauczyciela dyplomowanego,
1999-2000 studia podyplomowe - Wałbrzyska Wyższa Szkoła Zarządzania i Przedsiębiorczo-
ści: Zarządzanie w Oświacie,
2000-2001 studia podyplomowe -Wałbrzyska Wyższa Szkoła Zarządzania i Przedsiębiorczo-
ści: Diagnostyka Edukacyjna,
2003-2004 studia podyplomowe -Wałbrzyska Wyższa Szkoła Zarządzania i Przedsiębiorczo-
ści: Pedagogika,
2008-2009 Uniwersytet Warszawski – kurs w wymiarze 120 godz. dydaktycznych - „ Kon-
struowanie zadań egzaminacyjnych, Statystyka w dydaktyce”,
2008-2012 studia doktoranckie - Politechnika Śląska, Wydział Automatyki, Elektroniki i
Informatyki, kierunek Automatyka i Robotyka,
2014 - 2015 studia podyplomowe -Wałbrzyska Wyższa Szkoła Zarządzania i Przedsiębiorczo-
ści: Energetyka Odnawialna.
Publikacje:
1. Ryszard Janas „Wykonanie krzywek sterujących do automatów tokarskich wzdłużnych” Przegląd Mechaniczny 06-1984, str. 23 – 25,
2. Ryszard Janas, Marek Gerlach „Automatyka” – podręcznik do Liceum Technicznego, Wy-dawnictwa Szkolne i Pedagogiczne, 1998,
3. Ryszard Janas „Zastosowanie pompy hydraulicznej i koła zamachowego do wyznaczania charakterystyk silników elektrycznych” PAR 09-2009, str. 5 – 10,
4. Ryszard Janas „Adaptacyjna regulacja temperatury w piecu do wypału płytek ceramicz-nych” PAR 09-2013, str. 108 – 115.
5. Ryszard Janas „Dobór parametrów napędów energoelektronicznych” General and Pro-fessional Education 02-2014, str. 23 – 35.
Udział w konferencjach i sympozjach:
1. Ryszard Janas, „Szacowanie niepewności przy pomiarach momentu obrotowego silników elektrycznych za pomocą hamulca hydraulicznego”, Sympozjum „Niepewność pomiarów” Świnoujście 2010,
2. Ryszard Janas, „Niepewność pomiaru temperatury środowiska dynamicznego czujnikiem o określonej stałej czasowej”, Sympozjum „Niepewność pomiarów” Świnoujście 2011.
3. Udział w Sympozjum „Niepewność pomiarów” w Świnoujściu w latach 2007 – 2013.
Wykaz pozostałych działań i osiągnięć:
1. Praca w Zespole Szkół Politechnicznych „Energetyk” w Wałbrzychu Al. Wyzwolenia 5 od 1 stycznia 1989r. na stanowisku nauczyciela przedmiotów zawodowych, kierowni-ka szkolenia praktycznego, kierownika laboratorium, wicedyrektora., dyrektora. Pro-wadzenie zajęć dydaktycznych w pracowni automatyki i robotyki w zakresie: sterow-ników programowalnych, układów regulacji automatycznej, robotyki i mechatroniki.
Zaprojektowanie od podstaw w 1993 r. jednej z pierwszych w kraju na poziomie szko-ły średniej pracowni automatyki wyposażonej w:
Sterowniki programowalne (PLC) pracujące w sieci Unitelway wraz z pulpitami sy-mulacyjnymi i obiektami własnej konstrukcji (obiekty inercyjne, model dźwigu oso-bowego, model pralki automatycznej, model pomieszczenia, model układu chłodzą-cego),
Napędy energoelektroniczne prądu stałego i przemiennego składające się z silników elektrycznych, przemienników częstotliwości skalarnych i wektorowych, prze-kształtników zasilających, hamulców energoelektronicznych, hamulca hydrauliczne-go, koła zamachowego, bloku linowego z obciążnikiem,
Stanowiska z regulatorami dwupołożeniowymi, PID, PID + Fuzzy Logic, z systemem transferu danych do komputera za pomocą sieci RS 485,
Robot IRP-6 z chwytakiem pneumatycznym i pisakiem.
2. Uruchomienie pierwszego w byłym województwie wałbrzyskim węzła internetowego na potrzeby szkoły i pracodawców w 1995 roku.
3. Praca w Dolnośląskim Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu od 1.09.1995 na stanowisku konsultanta w zakresie przedmiotów zawo-dowych – organizacja, współorganizacja i prowadzenie rocznie około 100 godzin spo-tkań, seminariów i kursów z zakresu merytoryki i dydaktyki, w tym w szczególności:
„Organizacja kształcenia zawodowego w szkołach niemieckich” – wyjazd studyjny Papenburg 2003 – 4 dni, Osterode 2004 – 4 dni,
Seminarium szkoleniowe „Proces kształcenia zawodowego prowadzony we współ-pracy z pracodawcami na przykładzie krajów Unii Europejskiej”, organizator Mini-sterstwo Szkolnictwa Czeskiego w Telczu, 16-20 październik 2007,
Seminarium szkoleniowe „Sterowanie inżynierią procesową”, prowadzone w firmie GUNT w Hamburgu, trzydniowe – 2008,
Seminarium szkoleniowe „Robotino - nowa generacja robotów edukacyjnych”, pro-wadzone w firmie FESTO w Esslingen (Niemcy), pięciodniowe 2008,
Seminarium szkoleniowe „Napędy przekształtnikowe”, prowadzone w firmie Lucas Nulle w Kerpen (Niemcy), jednodniowe 2008,
Europejska Ścieżka Kształcenia Europass- Mobilność „Oprogramowanie obrabiarek CNC”, Budapest Uniwersity of Technology and Economics, Węgry, 5-11 października 2008,
Konferencja „Energetyka jądrowa” – Dukowany (Czechy), dwudniowa 2009 r.
4. Praca w Zespole Programowym ds. Liceum Technicznego, opracowanie w zespole programów nauczania dla profili: elektryczno – energetycznego oraz mechatroniczno – elektronicznego 1993 – 1996.
5. Opracowanie samodzielne kompletnego programu nauczania dla szkoły policealnej w zawodzie technik energoelektronik – 1998.
6. Napisanie 50% podręcznika dla Liceum Technicznego „Automatyka” wydanego przez Wydawnictwa Szkolne i Pedagogiczne w 1998 roku.
7. Praca w komisjach ds. awansu zawodowego nauczycieli w ramach pełnienia funkcji eksperta ds. awansu zawodowego 2002 – 2010.
8. Praca w roli eksperta ds. wyposażenia technodydaktycznego w branży mechatronicz-no – elektronicznej w realizowanym przez Urząd Marszałkowski we Wrocławiu w ra-mach Regionalnego Programu Operacyjnego Projekcie „Modernizacja Centrów Kształcenia Zawodowego na Dolnym Śląsku”. Wartość projektu 70 mln PLN [2007 – 2013]. Współautorstwo w/w projektu.
9. Praca w roli eksperta ds. wyposażenia technodydaktycznego w branży mechanicznej i elektryczno – energetycznej w realizowanym przez Urząd Marszałkowski we Wrocła-wiu w ramach Programu Operacyjnego Kapitał Ludzki Projekcie „Modernizacja Kształ-cenia Zawodowego na Dolnym Śląsku”. Wartość projektu 140 mln PLN [2007 – 2013].
10. Praca w roli autora i recenzenta zadań dla potrzeb egzaminu potwierdzającego kwali-fikacje zawodowe w zawodach branży mechanicznej, mechatronicznej, elektrycznej i elektronicznej [2010 – 2014]
11. Wykonanie na zlecenie Ministerstwa Edukacji Narodowej recenzji 4 podręczników do kształcenia zawodowego [2015 – 2016]:
Przygotowanie konwencjonalnych obrabiarek skrawających do obróbki,
Wykonywanie obróbki na konwencjonalnych obrabiarkach skrawających,
Przygotowanie obrabiarek sterowanych numerycznie do obróbki,
Wykonywanie obróbki na obrabiarkach sterowanych numerycznie, Autorstwa J. Figurskiego i J. Popisa, będących w trakcie procesu wydawniczego, pla-nowanych do wydania w roku 2016 przez Wydawnictwa Szkolne i Pedagogiczne.