Analiza DEM Przenośnika Zgrzebłowego
14
Wykorzystanie symulacyjnych metod obliczeniowych w analizie rozkładu prędkości strugi urobku na rynnie przenośnika zgrzebłowego Piotr Gospodarczyk, Piotr Kulinowski, Wojciech Czuba Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie, Wydział Inżynierii Mechanicznej i Robotyki, Katedra Maszyn Górniczych, Przeróbczych i Transportowych Streszczenie W pracy tej przedstawiono możliwość wykorzystania Metody Elementów Dyskretnych do numerycznej symulacji materiału sypkiego jako discontinuum. Metoda ta pozwala na modelowanie układów fizycznych składających się z wielu odrębnych elementów, przez co znalazła zastosowanie w analizie procesów mechanicznych związanych z transportem urobku na różnego rodzaju przenośnikach. W opracowaniu przedstawiono wyniki symulacji transportu urobku za pomocą przenośnika zgrzebłowego oraz poddano analizie rozkład prędkości w strudze transportowanego materiału. Porównano również wynik obliczeń teoretycznej wydajności przenośnika zgrzebłowego z wynikami uzyskanymi podczas symulacji. The use of simulation methods in computational analysis of excavation stream velocity on the gutter of a scraper conveyor Abstract This work presents the possibility of using Discrete Elements Method for numerical simulation of bulk material as discontinuum. This method allows modeling of physical systems composed of many separate elements, therefore it found application in the analysis of mechanical processes associated with the transportation of excavated material on the various types of conveyors. The paper presents results of simulations of transportation process using a scraper conveyor, and analyzed the velocity distribution in the stream of transported material. Also calculated theoretical efficiency of a scraper conveyor was compared with the results obtained during the simulation.
description
Analiza DEM pracy przenośnika zgrzebłowego
Transcript of Analiza DEM Przenośnika Zgrzebłowego

Wykorzystanie symulacyjnych metod obliczeniowych w analizie rozkładu prędkości strugi urobku na rynnie przenośnika
zgrzebłowego
Piotr Gospodarczyk, Piotr Kulinowski, Wojciech Czuba
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie, Wydział Inżynierii Mechanicznej i Robotyki, Katedra Maszyn Górniczych, Przeróbczych i Transportowych
Streszczenie
W pracy tej przedstawiono możliwość wykorzystania Metody Elementów Dyskretnych do numerycznej symulacji materiału sypkiego jako discontinuum. Metoda ta pozwala na modelowanie układów fizycznych składających się z wielu odrębnych elementów, przez co znalazła zastosowanie w analizie procesów mechanicznych związanych z transportem urobku na różnego rodzaju przenośnikach. W opracowaniu przedstawiono wyniki symulacji transportu urobku za pomocą przenośnika zgrzebłowego oraz poddano analizie rozkład prędkości w strudze transportowanego materiału. Porównano również wynik obliczeń teoretycznej wydajności przenośnika zgrzebłowego z wynikami uzyskanymi podczas symulacji.
The use of simulation methods in computational analysis of excavation stream velocity on the gutter of a scraper conveyor
Abstract
This work presents the possibility of using Discrete Elements Method for numerical simulation of bulk material as discontinuum. This method allows modeling of physical systems composed of many separate elements, therefore it found application in the analysis of mechanical processes associated with the transportation of excavated material on the various types of conveyors. The paper presents results of simulations of transportation process using a scraper conveyor, and analyzed the velocity distribution in the stream of transported material. Also calculated theoretical efficiency of a scraper conveyor was compared with the results obtained during the simulation.

Wstęp
Przenośniki zgrzebłowe są maszynami powszechnie używanymi w transporcie kopalnianym ze względu na możliwość pracy w trudnych warunkach (podwyższona temperatura, zapylenie, wilgoć itp.) panujących w wyrobiskach oraz z uwagi na prostą budowę i elastyczność w łączeniu poszczególnych elementów przenośnika. Umożliwiają one współpracę z ciężkimi maszynami urabiającymi i obudowami oraz charakteryzują się dużą wydajnością przy małych rozmiarach poprzecznych rynny [1]. W podziemiach kopalń przenośniki te stosowane są do odstawy urobku w wyrobiskach ścianowych i podścianowych. Wydajność przenośnika zgrzebłowego zależy od szeregu parametrów wśród których można wyróżnić między innymi prędkość strugi urobku, warunki eksploatacji (nachylenie poprzeczne i podłużne), charakterystykę materiału transportowanego (gęstość usypową, kąt naturalnego usypu, współczynniki tarcia) czy rozwiązanie konstrukcyjne rynny. W praktyce projektowej do obliczenia wydajności masowej przenośnika wykorzystuje się następującą zależność matematyczną.
[kg/s] (1)
gdzie:
vtr - prędkość przemieszczania urobku [m/s]
Ssu - pole przekroju strugi urobku [m2]
ρur - gęstość nasypowa urobku [kg/m3]
Prędkość przemieszczania urobku w całym przekroju strugi przyjmuje się jako równą prędkości cięgna łańcuchowego i wyznacza z zależności:
[m/s] (2)gdzie:
ωns - prędkość kątowa wału silnika w ruchu ustalonym [rad/s]
Dpbl - średnica podziałowa bębna łańcuchowego [m]
irps - przełożenie reduktora układu napędowego
Urobek stanowi ośrodek w przybliżeniu ciągły, ale o niejednorodnej strukturze i składzie, a co za tym idzie o trudnych do ustalenia wartościach takich podstawowych własności jak kąt tarcia wewnętrznego, czy też ruchowy kąt naturalnego usypu. W rzeczywistości prędkości poszczególnych warstw materiału poruszającego się na rynnie nie są sobie równe. Wynika to właśnie z tarcia wewnętrznego występującego w materiale, powodującego dodatkowe opory dla poruszającego się urobku (gdy przekroje główne przemieszczają się na granicy styku z przekrojami bocznymi), z rozbieżności pomiędzy oddziaływaniem na siebie kolejnych warstw materiału a także z nierównomiernego rozkładu nacisków pochodzących od sił oddziaływania rynny na materiał. Przekrój aktywnej strugi urobku również trudno jednoznacznie i dokładnie obliczyć ze względu na to, iż jego wartość jest funkcją wielu niestacjonarnych parametrów. Dla potrzeb obliczeń teoretycznej wydajności przenośnika rzeczywisty przekrój strugi urobku przybliża się do różnego rodzaju wieloboków. Następnie obszar ten dzieli się na elementarne figury płaskie – trójkąty, prostokąty czy trapezy a powierzchnia przekroju jest sumą powierzchni pól tych figur [1]. W ogólnym przypadku można wyróżnić 3 strefy w przekroju urobku:

Aktywną – cały materiał w tej strefie porusza się z prędkością zgrzebeł
Turbulentną – w strefie tej bryły materiału poruszają się ruchem zaburzonym z prędkością mniejszą niż główna struga (prędkość maleje wraz z odległością od przekroju głównego) [2]
Martwą – w strefie tej materiał się nie porusza bądź przemieszczenia urobku są pomijalne w aspekcie wydajności
Dlatego też w praktyce obliczeniowej przyjmuje się (zarówno podczas obliczeń wydajności jak i oporów ruchu) szereg współczynników mających na celu zrównoważenie wpływu zjawiska trudnych do obliczenia i/bądź uwzględnienia w inny sposób. Takie podejście do zagadnienia może dostarczać wyniki zbliżone do rzeczywistych wartości określonych parametrów, ale należy pamiętać, że wartości współczynników równoważących otrzymywane są na bazie długotrwałych obserwacji lub kosztownych badań. Istotne jest również to, że nie w każdym systemie urabiająco-transportowym, takie uniwersalne podejście do sprawy, przyniesie oczekiwane efekty. Ewentualne błędy mogą mieć bardzo duże konsekwencje w trakcie eksploatacji. Jedną z metod usprawnienia procesu projektowania przenośników zgrzebłowych jest możliwość wykorzystania symulacji komputerowych do analizy zachowania się urobku podczas transportu. Dzięki temu można zamodelować i zweryfikować pracę dane rozwiązania konstrukcyjnego, co w przypadku obliczeń analitycznych byłoby bardzo trudne lub wręcz niemożliwe.
Metoda elementów dyskretnych
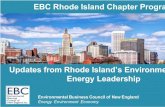
Dzisiejsze możliwości obliczeniowe komputerów pozwalają na wykorzystywanie metod numerycznych do symulacji nawet najbardziej złożonych zjawisk. Metoda elementów dyskretnych (Discrete Element Method – DEM) umożliwia modelowanie układów fizycznych składających się z bardzo wielu odrębnych, oddziałujących na siebie elementów. W odróżnieniu od rozwiązań numerycznych traktujących materiał sypki jako continuum (opartych na teoriach sprężystości i plastyczności), w metodzie elementów dyskretnych ruch i interakcje układu indywidualnych sfer (reprezentujących pojedyncze cząstki) jest symulowany za pomocą cyklicznie powtarzanego schematu, w którym równania ruchu integrowane są przy pomocy numerycznych metod obliczeniowych (metoda różnic skończonych, algorytm Verleta). Algorytm obliczeń oparty jest na zasadach sformułowanych przez Cundalla i Stracka (1979), z kilkoma ulepszeniami takimi jak modele wiązań (bonded contacts, Potyondy & Cundall, 2004), alternatywnymi schematami tłumienia i bardziej ogólną logiką granic (ścian) [11]. Cykl kalkulacji przedstawiony na rys. 1 składa się z dwóch zależnych od siebie algorytmów rozwiązujących dwa typy równań – ruchu i konstytutywne (obliczanie sił działających na elementy będące w kontakcie, których charakterystyka zależy od modelu kontaktu). W obydwu przypadkach, w trakcie rozwiązywania jednego typu równania, dane uzyskane na podstawie wcześniejszych obliczeń są znane i uznawane za stałe [11].

Rys. 1. Typowy cykl kalkulacji w metodzie elementów dyskretnych (po lewej). Implementacja zależności siła-przemieszczenie (po prawej). Źródło [11]
Dla zachowania efektywności obliczeń i pewnych uproszczeń w detekcji kontaktów, elementy reprezentowane są jako sfery lub konglomeraty sfer. Cząstki traktowane są jako sztywne jednak mogą na siebie nachodzić, co traktowane jest jako odkształcenia kontaktowe. Z odkształceń tych z kolei wynikają kontaktowe siły sprężystości działające na elementy. W zależności od dobranego modelu kontaktu, siła może mieć dodatkowe składowe uwzględniające takie zjawiska jak np. adhezja. Przykładowy liniowo-sprężysty model kontaktu przedstawia rys. 2.
Wypadkowa siła i moment działający na cząstkę, wraz z uwzględnieniem jej masy i momentu bezwładności pozwalają na wykorzystanie II prawa dynamiki Newtona do obliczenia przyspieszenia a w konsekwencji do wyprowadzenia równań ruchu. Następnie równania ruchu są integrowane dla bardzo krótkiego kroku czasowego, a element zostaje umieszczony w nowej pozycji. To z kolei powoduje konieczność uruchomienia algorytmu wykrywania nowych kontaktów (które mogły powstać po przemieszczeniu) jak również zlikwidowania już nieistniejących [6]. Cykl kalkulacji jest powtarzany aż wymagany czas symulacji zostanie osiągnięty. Schemat typowej symulacji jest stosunkowo prosty i opiera się na trzech podstawowych etapach [10]
Rys. 2 Liniowo-sprężysty model kontaktu z uwzględnieniem tarcia. Źródło [3]

1. Detekcja kontaktów – skanowanie obszaru symulacji w celu wykrycia nachodzących na siebie elementów
2. Aplikacja sił (prawa konstytutywne) – określenie wartości i charakteru sił działających na każdą cząstkę, w oparciu o właściwości materiału i otoczenia cząstek.
3. Zastosowanie II prawa dynamiki Newtona – przemieszczenie elementów w wyniku działających na nie sił.
Proces symulacji opiera się więc na powtarzających się kolejnych obliczeniach sił działających na wszystkie elementy układu a następnie ich re-lokalizacji w oparciu o podstawowe równania ruchu. Dzisiejsze jednostki obliczeniowe pozwalają na tak obciążające obliczenia, jednak zawsze należy brać pod uwagę fakt, że czas pojedynczego kroku uzależniony jest od masy elementów i ich sztywności. Im większa sztywność, przy mniejszej masie, tym dłuższy czas integracji. Dlatego tak ważne jest odpowiednie skalibrowanie parametrów wejściowych, aby uzyskać najbardziej wiarygodne wyniki, przy odpowiednio efektywnym czasie trwania obliczeń. Często należy przyjmować wartości znacznie mniejsze lub większe od rzeczywistych, aby otrzymać zadawalające rezultaty [4,5,6,7]. Przykładowo, czas integracji pojedynczego kroku symulacji może mieć wartość 1·10-6 s, co oznaczałoby konieczność wykonania 1 000 000 kolejnych obliczeń w celu obliczenia jednej sekundy przepływu materiału [10]. Technologia informatyczna rozwija się w bardzo dynamiczny sposób tak więc, można przypuszczać, że równolegle ewoluować będą algorytmy oparte o założenia DEM, mogące wykorzystać co raz to potężniejsze jednostki obliczeniowe.
Założenia do badań symulacyjnych
Podczas realizacji pracy przeprowadzono symulację procesu transportu urobku na przenośniku zgrzebłowym. Pierwszym etapem było przygotowanie geometrii rynny i zgrzebeł analizowanego układu. Typową konstrukcję przenośnika zgrzebłowego ścianowego przedstawia rysunek 3. W trakcie opracowywania geometrii przenośnika przeznaczonej do symulacji, konieczne było dokonanie pewnych uproszczeń i zrezygnowanie z detali. Jest to proces niezbędny ponieważ im większa złożoność geometrii tym dłuższy czas obliczeń. Zaleca się uproszczenie modelu do postaci umożliwiającej efektywną analizę układu przy zachowaniu odpowiedniego stopnia odwzorowania pracy urządzenia. Model jest odwzorowaniem rzeczywistego rozwiązania konstrukcyjnego, utworzony został na podstawie rysunków i wymiarów zawartych w literaturze [2]. Geometria została wykonana w zewnętrznym programie CAD a następnie wyeksportowana w postaci pliku STL (Stereolitography). W takim formacie model zaimportowano do programu PFC3D. Schemat układu przedstawiono na rys. 4, natomiast podstawowe parametry techniczne zawarte zostały w tabeli 1.
Rys. 3. Widok typowego przenośnika zgrzebłowego ścianowego. Źródło [Glinik]

Rys. 4. Uproszczony schemat układu geometrii rynny przenośnika zgrzebłowego. Wymiary w mm.
Tabela 1. Wybrane parametry układu
Prędkość zgrzebeł 0.8 m/sPodziałka 0.8 mZastawka 0.34 mDł. zasypanego odcinka 3 m
Modelowanie materiału transportowanego oparto na doborze odpowiedniego modelu kontaktu oraz jego parametrów, określeniu wielkości ziaren poszczególnych frakcji oraz analizie kształtu brył materiału (wpływu kształtu na przepływ materiału). W przeprowadzonej symulacji wykorzystany został model kontaktowy „Cohesion” [5]. Oparty jest on na mechanice kontaktu opisanej przez Hertz’a dodatkowo uwzględniając zjawiska takie jak adhezja i opory toczenia brył urobku. W przypadku każdej symulacji, aby możliwa była weryfikacja ilościowa, konieczne jest wykonanie kalibracji parametrów cechujących makroskopowe zachowanie materiału z mikroskopowymi wartościami parametrów indywidualnych elementów. Jedynie w przypadku gdy ziarna materiału są idealnie sferyczne, można bezpośrednio stosować wartości np. Modułu Younga czy sztywności [6]. W rzeczywistości jednak tak nie jest, dlatego też konieczne jest odpowiednie dopasowanie wartości mikro-parametrów tak aby zachowanie materiału sypkiego było jak najbliższe rzeczywistemu przepływowi [3,4,6]. Wartości przyjęte do przeprowadzenia symulacji zostały dobrane bez wykonania kalibracji w laboratorium a jedynie na podstawie wyników doświadczeń z wcześniej przeprowadzonych symulacji. Parametry są więc traktowane jako nieskalibrowane i w takim przypadku z dobrym rezultatem można wykonać jedynie analizę jakościową zachodzących zjawisk [7].

Tabela 2. Charakterystyczne właściwości materiału.
ParametrWartość
Makroskopowa MikroskopowaModuł Younga 0.6÷4.5 [GPa] 1e7 [MPa]
Liczba Poissona 0.14÷0.3 0.23Kąt tarcia wewnętrznego 45 [o] 45 [o]
Współczynnik tarcia o stal 0.7 0.7Sztywność poprzeczna Nie określono 1e6 [N/m]
Współczynnik oporów toczenia [materiał-materiał]
Nie określono 0.5
Współczynnik oporów toczenia [materiał-rynna]
Nie określono 0.3
Współczynnik tłumienia normalnego Nie określono 0.9 [N·s/m]Współczynnik tłumienia poprzecznego Nie określono 0.9 [N·s/m]
Gęstość usypowa 800-1000 [kg/m3] -Gęstość właściwa 1600 [kg/m3] 1600 [kg/m3]
Kąt usypu naturalnego w ruchu 15÷30 [o]Wynika z pozostałych
parametrów
Do obliczeń przyjęto także pewne uproszczenia w rozmiarach ziaren poszczególnych frakcji materiału. Najmniejsza frakcja (0÷0.08 m) została pominięta ponieważ znaczna ilość elementów powodowała by bardzo duże obciążenie dla obliczeń. Wielkości brył oraz kształty wykorzystane w symulacji przedstawia rys. 5. Dzięki różnorodności kształtów, możliwe było odzwierciedlenie zjawiska klinowania się brył, powodującego dodatkowe opory przy ścinaniu. W trakcie trwania symulacji obliczana była masowa wydajność przenośnika. Wyniki zostały porównane z teoretyczną wydajnością masową wyznaczoną na podstawie wzorów zawartych w literaturze [2].
0.08-0.14 0.14-0.3 0.3-0.60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.40.3 0.3
Rozmiar ziarna [m]
Zaw
arto
ść p
oszc
zegó
lnyc
h fr
akcji
[%]
Rys. 5. Rozkład wielkości brył poszczególnych frakcji wraz z zastosowanym kształtem.
Wyniki badań modeli i ich podsumowanie
Aby istniała możliwość porównania wydajności teoretycznej z wydajnością obliczaną podczas wykonywania symulacji, materiał został wygenerowany tak aby jego przekrój „pierwotny” przybrał określony kształt. Wykonane to zostało przy pomocy powierzchni ograniczających (formujących dany przekrój), które przed uruchomieniem symulacji zostały usunięte pozwalając na swobodne dalsze ułożenie się materiału. Uzyskany przekrój

prezentuje rys 6. Przy takich założeniach, według [2] przekrój bazowy ma powierzchnię A30=0,1185 m2 (kąt usypu naturalnego 30o) a przy ruchu ciągłym, przyjmując kąt nasypu naturalnego w ruchu 15o, A15=0,1017 m2.
Rys. 6. Przekrój strugi urobku na początku symulacji (po lewej). Podział na charakterystyczne strefy (po prawej)
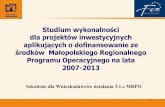
Część przebiegu symulacji prezentuje rys 7. Ukazane są na nim widoki z kolejnych etapów (pierwszych trzech sekund ruchu zgrzebeł po rynnie przenośnika). Analizując uzyskane wyniki można zauważyć charakterystyczne strefy poruszającego się materiału, w których prędkość różni się w zależności od odległości danego obszaru urobku od zgrzebła.
t = 0 s
t = 1 s

Rys 7. Rozkład prędkości strugi urobku w trakcie symulacji transportu. Kolory określają prędkości brył.
Niebieskim kolorem oznaczone są elementy nieruchome, czerwonym – posiadające największą prędkość (>1.2 m/s). Różnice te wynikają między innymi ze sposobu przekazywania pędu przez poszczególne warstwy a także takich zjawisk jak staczanie się urobku w przód po poruszającej się warstwie materiału (prędkość maksymalna) lub wtaczanie się po formującym się przed zgrzebłem zboczu (kolor jasnoniebieski w pewnej odległości od zgrzebła). W ten sposób przed zgrzebłem powstaje skupisko materiału charakterystyczne dla danych warunków początkowych. W przypadku tej analizy, odzwierciedlony został stan, w którym przenośnik nie był zasypywany w sposób ciągły, dlatego też podczas procesu transportu powstają przerwy w strudze materiału. W przypadku transportu ciągłego, po pewnym czasie zostałby ukształtowany odpowiedni tor umożliwiający pełne załadowanie obszaru pomiędzy zgrzebłami. Podobny efekt przy takich warunkach początkowych (danej ilości materiału) mogłoby przynieść zmniejszenie podziałki zgrzebeł.
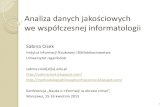
Po przeliczeniu masy materiału wygenerowanej przez program przy danych założeniach (przede wszystkim kształt i rozmiary cząstek), gęstość usypowa materiału w przybliżeniu wynosiła ok. 690 kg/m3. Taka gęstość usypowa została użyta do obliczenia teoretycznej wydajności przenośnika na podstawie literatury [2]. Porównanie rezultatów analitycznych obliczeń ilości przetransportowanego urobku w jednostce czasu, z wynikami symulacji przedstawia rys 8. W pierwszym okresie symulacji (1.5÷2 s) krzywe opisujące ilość przetransportowanego materiału pokrywają się. Po upływie ok. 0.5 s następuje spłaszczenie krzywej symulacji co odzwierciedla obszary pomiędzy zgrzebłami (rys 7), w których nie ma materiału. Można jednak przypuszczać, że gdyby transport urobku był ciągły (ukształtowany tor ruchu umożliwiający wypełnienie całego obszaru pomiędzy zgrzebłami), to wydajności byłyby bardzo zbliżone. Po okresie, w obszar rejestracji przetransportowanego urobku
t = 2 s
t = 3 s

dostaje się kolejna partia materiału i ilość przetransportowanej masy w jednostce czasu znowu jest niemalże identyczna z wynikami obliczeń analitycznych.
0 1 2 3 4 5 6 7 8 90
50
100
150
200
250
AnalitycznieSymulacja
Czas [s]
Ilość
prz
etra
nspo
rtow
aneg
o ur
obku
[kg]
Rys.8. Porównanie ilości przetransportowanego urobku dla obliczeń symulacyjnych i analitycznych
Przy przyjętym kształcie i parametrach pryzmy urobku i przy założeniu, iż wzór teoretyczny jest przez praktykę dostatecznie zweryfikowany można postawić tezę, iż przyjęte do symulacji modele kontaktów i dane wejściowe zostały ustalone prawidłowo i mogą stanowić bazę dla kolejnych badań symulacyjnych.
Celem artykułu było przedstawienie możliwości analizy zachowania się materiałów sypkich z wykorzystaniem metody elementów dyskretnych w odniesieniu do przenośnika zgrzebłowego. Badania będą kontynuowane dla bardziej złożonych sytuacji pracy przenośnika ścianowego, takich jak m. in. zasypywania urobkiem z wydajnością maszyny urabiającej. Metoda ta już teraz jest z powodzeniem stosowana do wspomagania procesu projektowania maszyn i urządzeń transportowych. W najbliższej przyszłości w połączeniu z metodą elementów skończonych prawdopodobnie stanie się standardem powszechnie wykorzystywanym w przemyśle, do analizy zjawisk występujących podczas transportu, przeróbki bądź innych procesów mechanicznych związanych z materiałami granulowanymi.
Literatura
[1] Antoniak J., Urządzenia i systemy transportu podziemnego w kopalniach, wydawnictwo „Śląsk”, Katowice 1990
[2] Antoniak J., Obliczenia przenośników stosowanych w górnictwie, wydawnictwo „Śląsk”, Katowice 1970
[3] Coetzee C.J. et al. Discrete element parameter calibration and the modelling of dragline bucket filling. J Terramechanics (2009)
[4] Coetzee C.J., Els D.N.J., Calibration of granular material parameters for DEM modeling and numerical verification by blade-granular material interaction, Journal of Terramechanics 46 (2009), str. 15-26
[5] Gröger T., Documentation for the User Defined Contact Model „Cohesion“

[6] Gröger T., Katterfeld A., Application of the Discrete Element Method in Material Handling Part 1: Basics and Calibration, Bulk Solids Handling, vol. 27 2007 no. 1, str. 17-23
[7] Gröger T., Katterfeld A., Minkin A., Application of the Discrete Element Method in Material Handling Part 2: Screw and Shaftless Screw Conveyors, Bulk Solids Handling, vol. 27 2007 no. 2, str. 84-93
[8] Gröger T., Katterfeld A., Application of the Discrete Element Method in Material Handling Part 3: Transfer Stations, Bulk Solids Handling, vol. 27 2007 no. 3, str. 158-166
[9] Gröger T., Katterfeld A., Application of the Discrete Element Method in Material Handling Part 4: Bucket Elevators and Scraper Conveyors, Bulk Solids Handling, vol. 27 2007 no. 4, str. 228-234
[10] Kruse D., Lemmon R. , Using the Discrete Element Method as an Everyday Design Tool
[11] www.itascacg.com