Ambient Intelligence - PMiKpmik.imio.pw.edu.pl/pliki/WMS/WMS_8.pdf · Ambient Intelligence (C)...
16
1 (C) Z.Pióro, WMS_w8, zima 2008, slajd 1 Ambient Intelligence (C) Z.Pióro, WMS_w8, zima 2008, slajd 2 „Ambient Intelligence” – definicja EC Zdefiniowana w 2001r. przez The EC Information Society Technologies Advisory Group w wizji The Information Society , Ambient Intelligence kładzie nacisk na większą przyjazność dla uŜytkownika, dostarczanie efektywniejszych usług, działanie w imieniu uŜytkownika i wspomaganie ludzkich interakcji. W tej wizji (do roku 2010) ludzie będą otoczeni inteligentnymi i intuicyjnymi interfejsami wbudowanymi w codzienne obiekty rozpoznające i reagujące na indywidualną obecność w niewidoczny sposób. Jari Ahola, „Ambient Intelligence”, VTT, 2001 (C) Z.Pióro, WMS_w8, zima 2008, slajd 3 I nowszy, firmowy opis „Ambient Intelligence is a vision where environment becomes smart, friendly, context-aware and responsive to any type of human needs. In this world, computing and networking technology coexist with people in a ubiquitous and pervasive way. In this world, numerous miniature and interconnected smart devices create a new intelligence and interact with each other seamlessly.” ST Journal of Research, Vol 4, No 1, 1977, Wireless Sensor Networks (C) Z.Pióro, WMS_w8, zima 2008, slajd 4 „Ambient Intelligence” – definicja EC Ambient Intelligence budowane będzie w oparciu o trzy kluczowe technologie: Ubiquitous Computing (wszechobecny komputing), Ubiquitous Communication (wszechobecną komunikację), Intelligent User Interfaces (inteligentne interfejsy uŜytkownika). śadna z tych technologii nie moŜe obejść się bez zaawansowanych technologii mikrosystemowych. (C) Z.Pióro, WMS_w8, zima 2008, slajd 5 Ambient Intelligence Global System WPAN Ad-Hoc Network of Picocell Ambient Transducers T: transducer C: baseband RF: radio link 1/person 100µW, 1Gops peak (k)bps Ambien t WAN 10m 1m see hear feel WLAN Base stations <1W, 10Gops > 100 Mbps >100/person speak show stimulate WBAN Body Transducers 100µW -(k)bps SoC-SiP (Wearable) Assistant • biometric input • global connectivity • multimedia, games • QoS • GPS • augmented reality • health, security 10..100Gops 0.1-2W R F TC R Hugo De Man, „Nanoscale System Design Challenges: Business as Usual?”, K.U.Leuven/ IMEC WPAN - wireless personal area network (C) Z.Pióro, WMS_w8, zima 2008, slajd 6 Ambient Intelligence - USA CITRIS focuses on using IT to provide solutions to grand-challenge social and commercial problems affecting the quality of life of Californians and people around the world.
Transcript of Ambient Intelligence - PMiKpmik.imio.pw.edu.pl/pliki/WMS/WMS_8.pdf · Ambient Intelligence (C)...
1
(C) Z.Pióro, WMS_w8, zima 2008, slajd 1
Ambient Intelligence
(C) Z.Pióro, WMS_w8, zima 2008, slajd 2
„Ambient Intelligence” – definicja EC
Zdefiniowana w 2001r. przez The EC Information Society
Technologies Advisory Group w wizji The Information Society,
Ambient Intelligence
kładzie nacisk na większą przyjazność dla uŜytkownika,
dostarczanie efektywniejszych usług, działanie w imieniu
uŜytkownika i wspomaganie ludzkich interakcji.
W tej wizji (do roku 2010) ludzie będą otoczeni inteligentnymi
i intuicyjnymi interfejsami wbudowanymi w codzienne obiekty
rozpoznające i reagujące na indywidualną obecność w
niewidoczny sposób.
Jari Ahola, „Ambient Intelligence”, VTT, 2001
(C) Z.Pióro, WMS_w8, zima 2008, slajd 3
I nowszy, firmowy opis
„Ambient Intelligence is a vision where environment becomes smart, friendly, context-aware and responsive to any type of human needs. In this world, computing and networking technology coexist with people in a ubiquitous and pervasive way. In this world, numerous miniature and interconnected smart devices create a new intelligence and interact with each other seamlessly.”
ST Journal of Research, Vol 4, No 1,1977, Wireless Sensor Networks (C) Z.Pióro, WMS_w8, zima 2008, slajd 4
„Ambient Intelligence” – definicja EC
Ambient Intelligence budowane będzie w oparciu o trzy
kluczowe technologie:
� Ubiquitous Computing (wszechobecny komputing),
� Ubiquitous Communication (wszechobecną
komunikację),
� Intelligent User Interfaces (inteligentne interfejsy
uŜytkownika).
śadna z tych technologii nie moŜe obejść się bez
zaawansowanych technologii mikrosystemowych.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 5
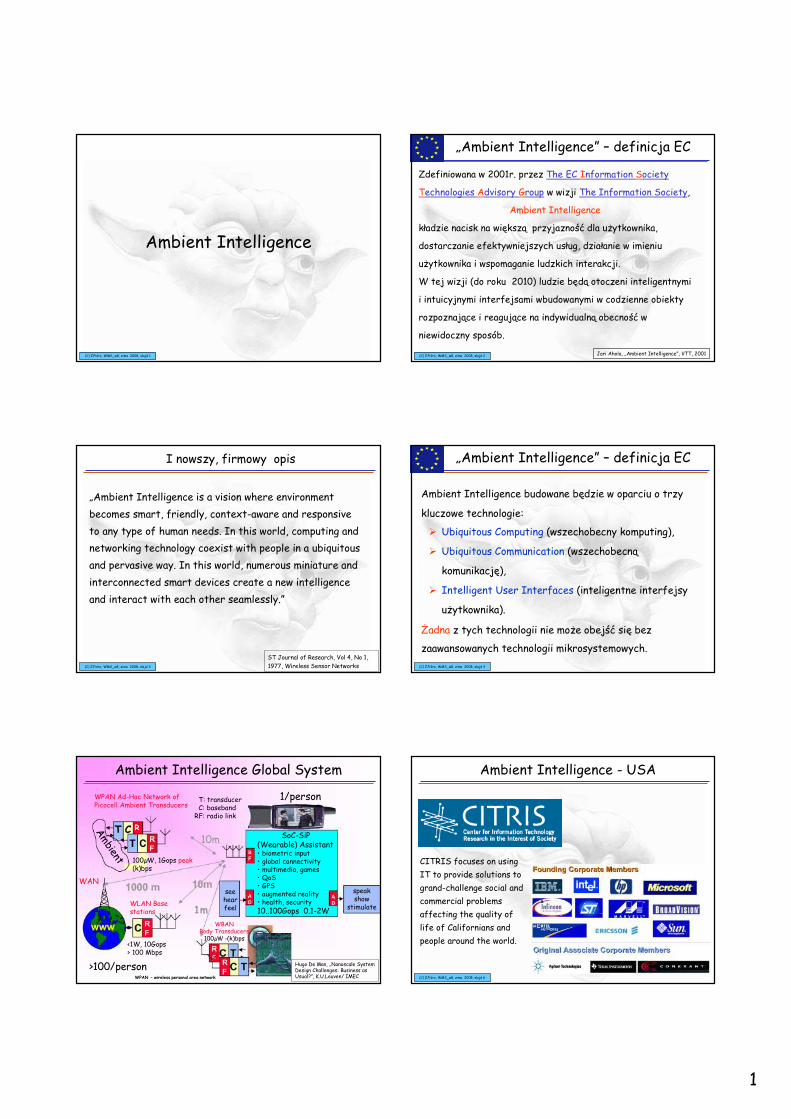
Ambient Intelligence Global System
WPAN Ad-Hoc Network of Picocell Ambient Transducers
T: transducerC: baseband
RF: radio link
1/person
100µW, 1Gops peak(k)bps
Ambient
WAN
10m
1m
seehearfeelWLAN Base
stations
<1W, 10Gops> 100 Mbps
>100/person
speakshow
stimulate
WBANBody Transducers100µW -(k)bps
SoC-SiP(Wearable) Assistant• biometric input• global connectivity• multimedia, games • QoS• GPS• augmented reality• health, security10..100Gops 0.1-2W
RF
T C R
Hugo De Man, „Nanoscale System Design Challenges: Business as Usual?”, K.U.Leuven/ IMECWPAN - wireless personal area network (C) Z.Pióro, WMS_w8, zima 2008, slajd 6
Ambient Intelligence - USA
CITRIS focuses on using IT to provide solutions togrand-challenge social and commercial problemsaffecting the quality of life of Californians andpeople around the world.
2
(C) Z.Pióro, WMS_w8, zima 2008, slajd 7
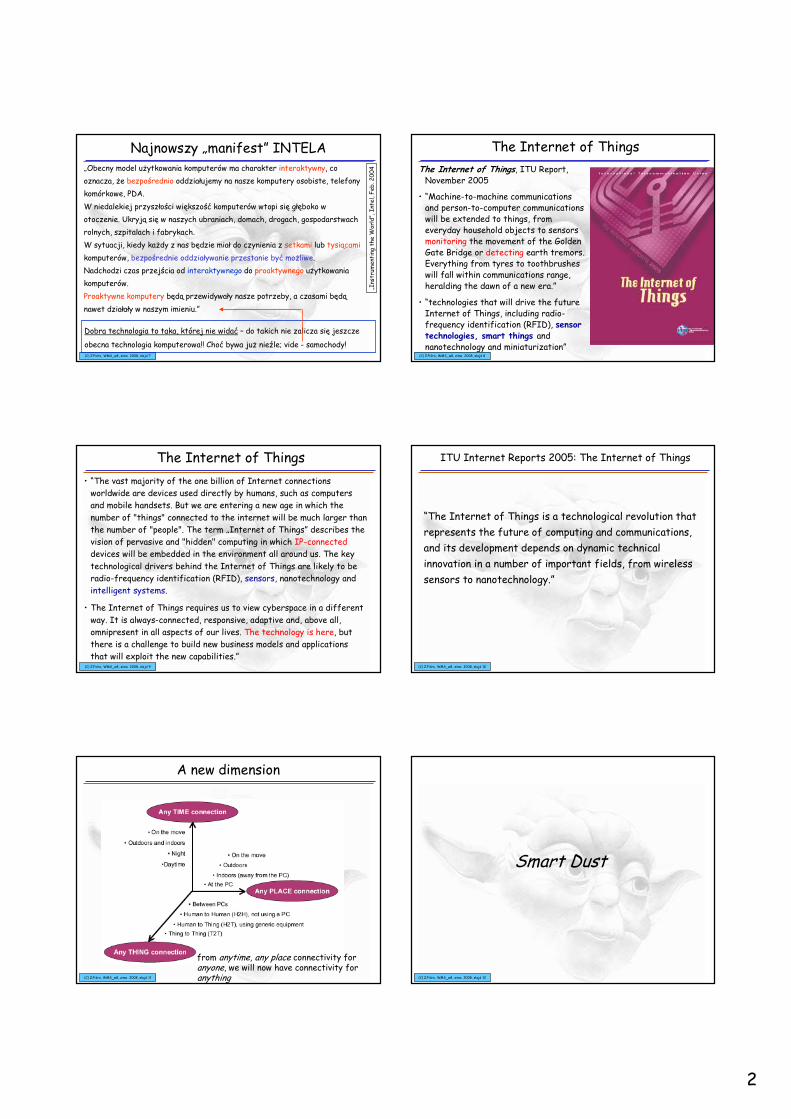
Najnowszy „manifest” INTELA„Obecny model uŜytkowania komputerów ma charakter interaktywny, co oznacza, Ŝe bezpośrednio oddziałujemy na nasze komputery osobiste, telefony komórkowe, PDA.
W niedalekiej przyszłości większość komputerów wtopi się głęboko w otoczenie. Ukryją się w naszych ubraniach, domach, drogach, gospodarstwach rolnych, szpitalach i fabrykach. W sytuacji, kiedy kaŜdy z nas będzie miał do czynienia z setkami lub tysiącami
komputerów, bezpośrednie oddziaływanie przestanie być moŜliwe. Nadchodzi czas przejścia od interaktywnego do proaktywnego uŜytkowania komputerów.Proaktywne komputery będą przewidywały nasze potrzeby, a czasami będą
nawet działały w naszym imieniu.”
„Instrum
enting
the
World”, Intel, F
eb. 2
004
Dobra technologia to taka, której nie widać – do takich nie zalicza się jeszcze
obecna technologia komputerowa!! Choć bywa juŜ nieźle; vide - samochody!(C) Z.Pióro, WMS_w8, zima 2008, slajd 8
The Internet of ThingsThe Internet of Things, ITU Report,November 2005
• “Machine-to-machine communications and person-to-computer communicationswill be extended to things, from everyday household objects to sensorsmonitoring the movement of the Golden Gate Bridge or detecting earth tremors.Everything from tyres to toothbrusheswill fall within communications range,heralding the dawn of a new era.”
• “technologies that will drive the futureInternet of Things, including radio-frequency identification (RFID), sensortechnologies, smart things and nanotechnology and miniaturization”
(C) Z.Pióro, WMS_w8, zima 2008, slajd 9
The Internet of Things• “The vast majority of the one billion of Internet connections worldwide are devices used directly by humans, such as computers and mobile handsets. But we are entering a new age in which the number of "things" connected to the internet will be much larger than the number of "people". The term „Internet of Things” describes the vision of pervasive and "hidden" computing in which IP-connected devices will be embedded in the environment all around us. The key technological drivers behind the Internet of Things are likely to be radio-frequency identification (RFID), sensors, nanotechnology and intelligent systems.
• The Internet of Things requires us to view cyberspace in a different way. It is always-connected, responsive, adaptive and, above all,omnipresent in all aspects of our lives. The technology is here, butthere is a challenge to build new business models and applications that will exploit the new capabilities.”
(C) Z.Pióro, WMS_w8, zima 2008, slajd 10
ITU Internet Reports 2005: The Internet of Things
“The Internet of Things is a technological revolution that represents the future of computing and communications, and its development depends on dynamic technical innovation in a number of important fields, from wireless sensors to nanotechnology.”
(C) Z.Pióro, WMS_w8, zima 2008, slajd 11
A new dimension
from anytime, any place connectivity for anyone, we will now have connectivity for anything (C) Z.Pióro, WMS_w8, zima 2008, slajd 12
Smart Dust
3
(C) Z.Pióro, WMS_w8, zima 2008, slajd 13
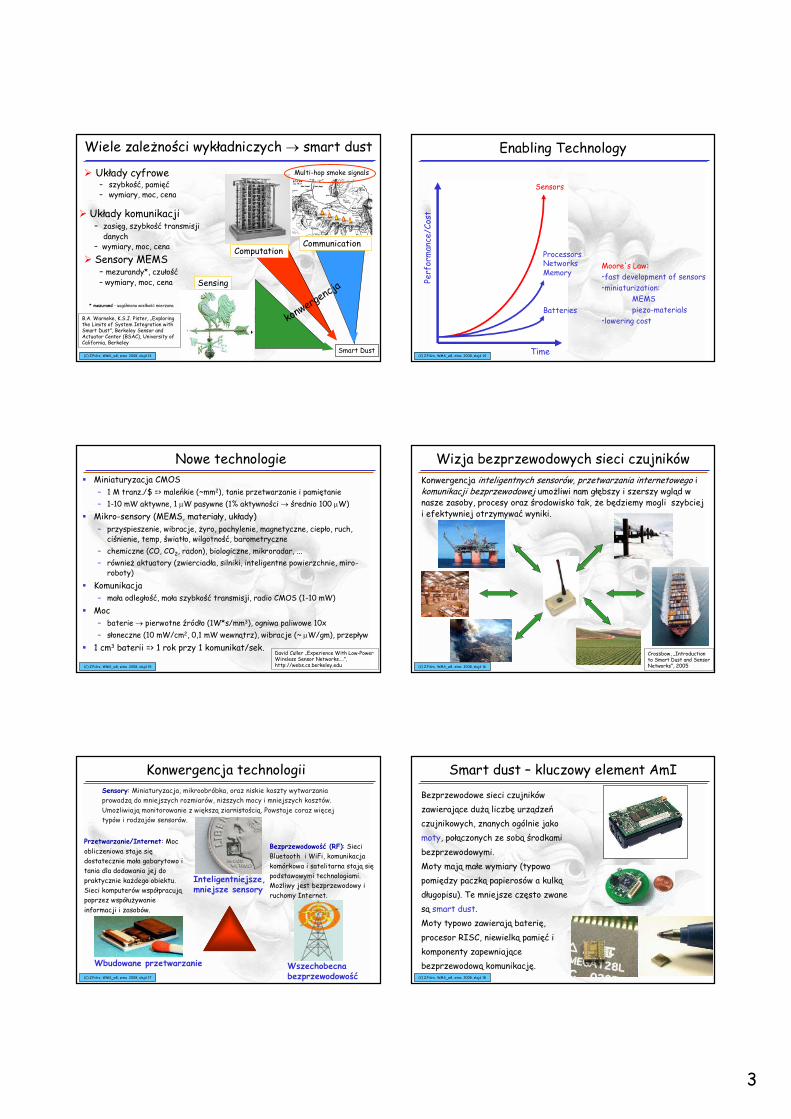
Wiele zaleŜności wykładniczych → smart dust
� Układy cyfrowe– szybkość, pamięć– wymiary, moc, cena
Computation� Sensory MEMS
– mezurandy*, czułość– wymiary, moc, cena Sensing
* mezurand - uogólniona wielkość mierzona
B.A. Warneke, K.S.J. Pister, „Exploring the Limits of System Integration with Smart Dust”, Berkeley Sensor and Actuator Center (BSAC), University of California, Berkeley
Smart Dust
� Układy komunikacji – zasięg, szybkość transmisji
danych – wymiary, moc, cena Communication
Multi-hop smoke signals
konwer
gencja
(C) Z.Pióro, WMS_w8, zima 2008, slajd 14
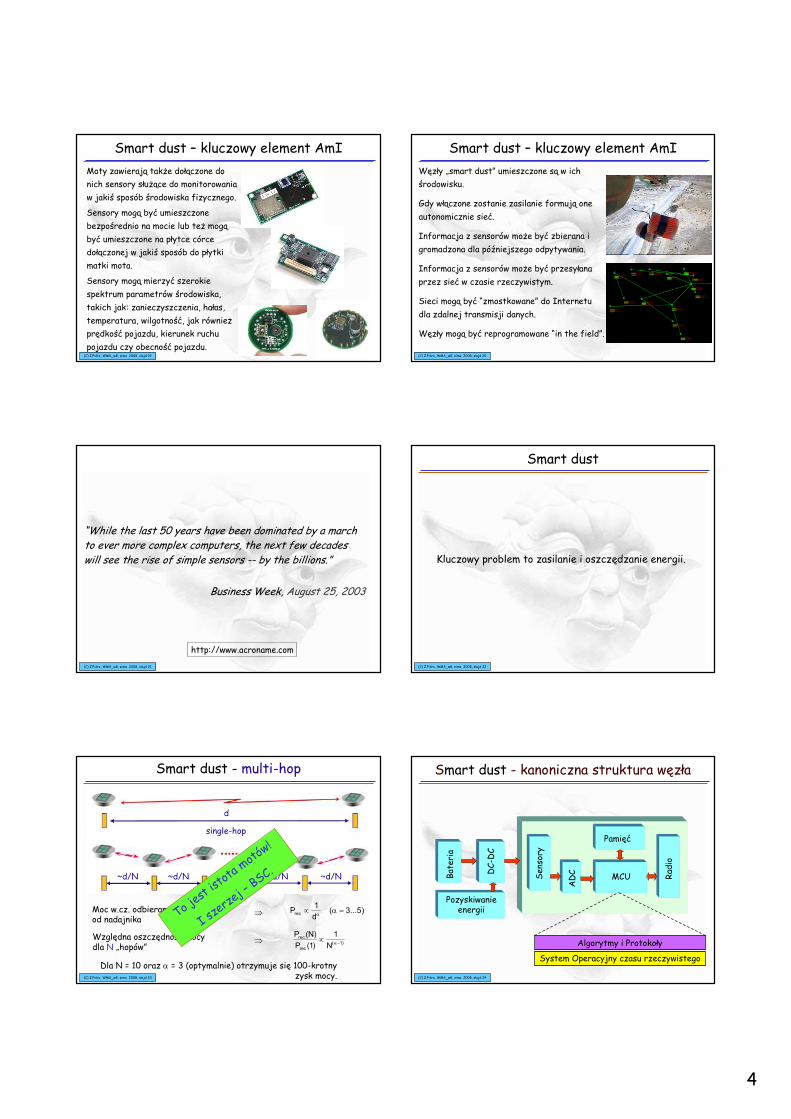
Enabling Technology
Performance
/Cost
Sensors
ProcessorsNetworksMemory
Batteries
Time
Moore's Law:•fast development of sensors•miniaturization:
MEMSpiezo-materials
•lowering cost
(C) Z.Pióro, WMS_w8, zima 2008, slajd 15
Nowe technologie� Miniaturyzacja CMOS
– 1 M tranz./$ => maleńkie (~mm2), tanie przetwarzanie i pamiętanie– 1-10 mW aktywne, 1 µW pasywne (1% aktywności → średnio 100 µW)
� Mikro-sensory (MEMS, materiały, układy)– przyspieszenie, wibracje, Ŝyro, pochylenie, magnetyczne, ciepło, ruch,
ciśnienie, temp, światło, wilgotność, barometryczne– chemiczne (CO, CO2, radon), biologiczne, mikroradar, ...– równieŜ aktuatory (zwierciadła, silniki, inteligentne powierzchnie, miro-
roboty)
� Komunikacja– mała odległość, mała szybkość transmisji, radio CMOS (1-10 mW)
� Moc– baterie → pierwotne źródło (1W*s/mm3), ogniwa paliwowe 10x– słoneczne (10 mW/cm2, 0,1 mW wewnątrz), wibracje (~ µW/gm), przepływ
� 1 cm3 baterii => 1 rok przy 1 komunikat/sek.David Culler „Experience With Low-Power Wireless Sensor Networks....”, http://webs.cs.berkeley.edu (C) Z.Pióro, WMS_w8, zima 2008, slajd 16
Wizja bezprzewodowych sieci czujnikówKonwergencja inteligentnych sensorów, przetwarzania internetowego i komunikacji bezprzewodowej umoŜliwi nam głębszy i szerszy wgląd w nasze zasoby, procesy oraz środowisko tak, Ŝe będziemy mogli szybciej i efektywniej otrzymywać wyniki.
Crossbow, „Introduction to Smart Dust and Sensor Networks”, 2005
(C) Z.Pióro, WMS_w8, zima 2008, slajd 17
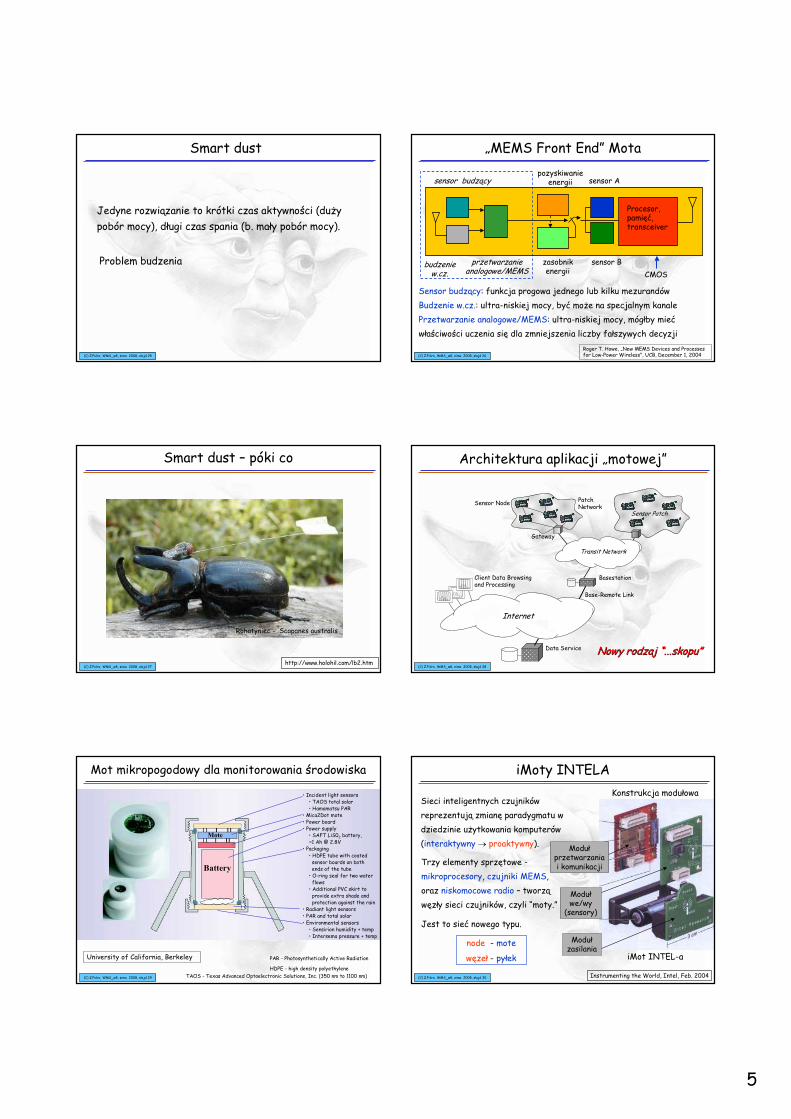
Konwergencja technologiiSensory: Miniaturyzacja, mikroobróbka, oraz niskie koszty wytwarzania prowadzą do mniejszych rozmiarów, niŜszych mocy i mniejszych kosztów. UmoŜliwiają monitorowanie z większą ziarnistością. Powstaje coraz więcej typów i rodzajów sensorów.
Inteligentniejsze, mniejsze sensory
Przetwarzanie/Internet: Moc obliczeniowa staje się dostatecznie mała gabarytowo i tania dla dodawania jej do praktycznie kaŜdego obiektu. Sieci komputerów współpracują poprzez współuŜywanie informacji i zasobów.
Wbudowane przetwarzanie
Bezprzewodowość (RF): SieciBluetooth i WiFi, komunikacja komórkowa i satelitarna stają się podstawowymi technologiami. MoŜliwy jest bezprzewodowy i ruchomy Internet.
Wszechobecna bezprzewodowość (C) Z.Pióro, WMS_w8, zima 2008, slajd 18
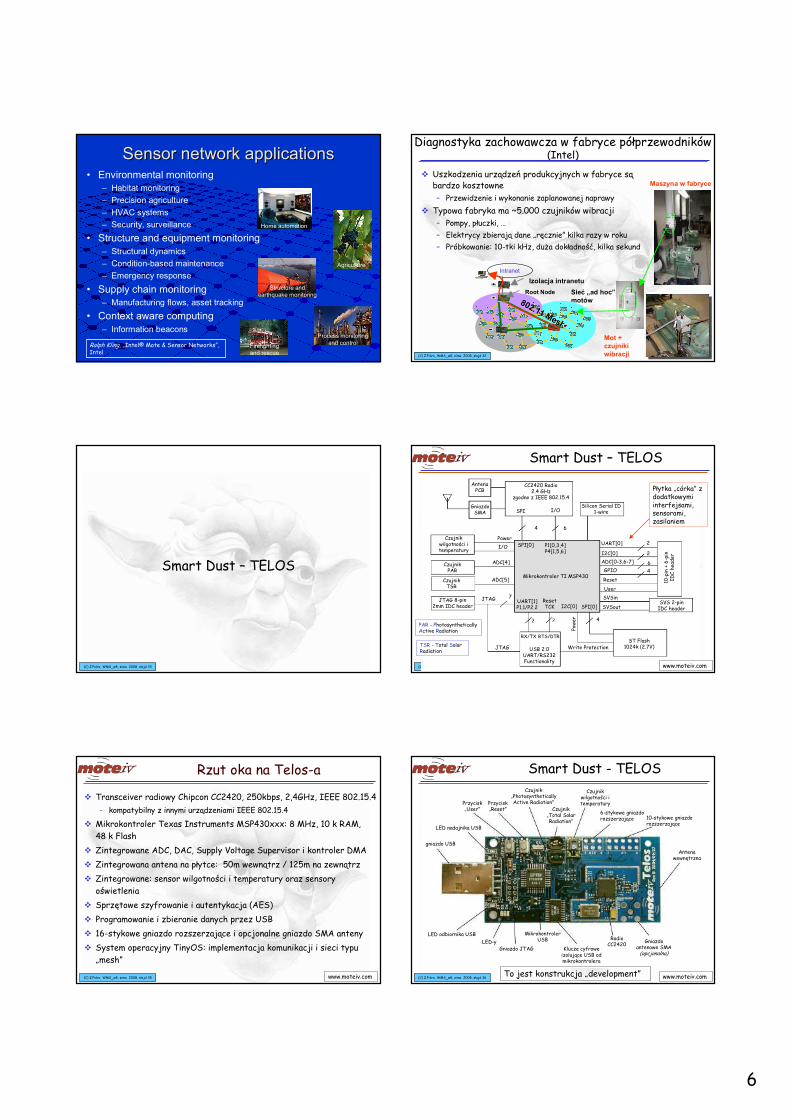
Smart dust – kluczowy element AmI
Bezprzewodowe sieci czujników zawierające duŜą liczbę urządzeń czujnikowych, znanych ogólnie jakomoty, połączonych ze sobą środkami
bezprzewodowymi. Moty mają małe wymiary (typowo pomiędzy paczką papierosów a kulką długopisu). Te mniejsze często zwane są smart dust.Moty typowo zawierają baterię,
procesor RISC, niewielką pamięć i komponenty zapewniające bezprzewodową komunikację.
4
(C) Z.Pióro, WMS_w8, zima 2008, slajd 19
Smart dust – kluczowy element AmIMoty zawierają takŜe dołączone do nich sensory słuŜące do monitorowania w jakiś sposób środowiska fizycznego.
Sensory mogą być umieszczone bezpośrednio na mocie lub teŜ mogą być umieszczone na płytce córce dołączonej w jakiś sposób do płytki matki mota.
Sensory mogą mierzyć szerokie spektrum parametrów środowiska, takich jak: zanieczyszczenia, hałas, temperatura, wilgotność, jak równieŜ prędkość pojazdu, kierunek ruchu pojazdu czy obecność pojazdu.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 20
Smart dust – kluczowy element AmIWęzły „smart dust” umieszczone są w ich środowisku.
Gdy włączone zostanie zasilanie formują one autonomicznie sieć.
Informacja z sensorów moŜe być zbierana i gromadzona dla późniejszego odpytywania.
Informacja z sensorów moŜe być przesyłana przez sieć w czasie rzeczywistym.
Sieci mogą być “zmostkowane” do Internetudla zdalnej transmisji danych.
Węzły mogą być reprogramowane “in the field”.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 21
“While the last 50 years have been dominated by a march to ever more complex computers, the next few decades will see the rise of simple sensors -- by the billions.”
Business Week, August 25, 2003
http://www.acroname.com
(C) Z.Pióro, WMS_w8, zima 2008, slajd 22
Smart dust
Kluczowy problem to zasilanie i oszczędzanie energii.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 23
Smart dust - multi-hop
single-hop
d
~d/N ~d/N ~d/N ~d/N
multi-hop
Dla N = 10 oraz α = 3 (optymalnie) otrzymuje się 100-krotny zysk mocy.
)5...3(d
1Prec =α∝
αMoc w.cz. odbierana w odległości dod nadajnika
⇒
)1(
rec
rec
N
1
)1(P
)N(P−α
∝Względna oszczędność mocy dla N „hopów”
⇒
To jest istota
motów
!
I szer
zej – B
SC.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 24
Smart dust - kanoniczna struktura węzła
Algorytmy i Protokoły
System Operacyjny czasu rzeczywistego
Bateria
DC-DC
Sen
sory
ADC MCU
Pamięć
Radio
Pozyskiwanie energii
5
(C) Z.Pióro, WMS_w8, zima 2008, slajd 25
Smart dust
Jedyne rozwiązanie to krótki czas aktywności (duŜy pobór mocy), długi czas spania (b. mały pobór mocy).
Problem budzenia
(C) Z.Pióro, WMS_w8, zima 2008, slajd 26
„MEMS Front End” Mota
sensor budzący
budzenie w.cz.
przetwarzanie analogowe/MEMS
pozyskiwanie energii
zasobnik energii
sensor A
sensor B
Procesor, pamięć, transceiver
CMOS
Sensor budzący: funkcja progowa jednego lub kilku mezurandów Budzenie w.cz.: ultra-niskiej mocy, być moŜe na specjalnym kanale Przetwarzanie analogowe/MEMS: ultra-niskiej mocy, mógłby mieć właściwości uczenia się dla zmniejszenia liczby fałszywych decyzji
Roger T. Howe, „New MEMS Devices and Processesfor Low-Power Wireless”, UCB, December 1, 2004
(C) Z.Pióro, WMS_w8, zima 2008, slajd 27
Smart dust – póki co
http://www.holohil.com/lb2.htm
Rohatyniec - Scapanes australis
(C) Z.Pióro, WMS_w8, zima 2008, slajd 28
Architektura aplikacji „motowej”
Base-Remote Link
Data Service
Client Data Browsingand Processing
Basestation
Gateway
Sensor Patch
Patch NetworkSensor Node
Nowy rodzaj “...skopu”Nowy rodzaj “...skopu”
Transit Network
Internet
(C) Z.Pióro, WMS_w8, zima 2008, slajd 29
Mot mikropogodowy dla monitorowania środowiska
Battery
Mote
• Incident light sensors• TAOS total solar• Hamamatsu PAR
• Mica2Dot mote• Power board• Power supply
• SAFT LiS02 battery,~1 Ah @ 2.8V
• Packaging• HDPE tube with coatedsensor boards on bothends of the tube
• O-ring seal for two waterflows
• Additional PVC skirt toprovide extra shade andprotection against the rain
• Radiant light sensors• PAR and total solar• Environmental sensors
• Sensirion humidity + temp• Intersema pressure + temp
PAR - Photosynthetically Active Radiation
HDPE - high density polyethyleneTAOS - Texas Advanced Optoelectronic Solutions, Inc. (350 nm to 1100 nm)
University of California, Berkeley
(C) Z.Pióro, WMS_w8, zima 2008, slajd 30
iMoty INTELA
Sieci inteligentnych czujników reprezentują zmianę paradygmatu w dziedzinie uŜytkowania komputerów (interaktywny → proaktywny).
Instrumenting the World, Intel, Feb. 2004
node - mote
węzeł - pyłek
Trzy elementy sprzętowe -mikroprocesory, czujniki MEMS, oraz niskomocowe radio – tworzą węzły sieci czujników, czyli “moty.”
Jest to sieć nowego typu.
iMot INTEL-a
Konstrukcja modułowa
Moduł przetwarzania i komunikacji
Moduł zasilania
Moduł we/wy
(sensory)
6
(C) Z.Pióro, WMS_w8, zima 2008, slajd 31
Sensor network applicationsSensor network applications
Firefighting
and rescue
Process monitoring
and control
Structure and
earthquake monitoring
Agriculture
Home automation
• Environmental monitoring
– Habitat monitoring
– Precision agriculture
– HVAC systems
– Security, surveillance
• Structure and equipment monitoring
– Structural dynamics
– Condition-based maintenance
– Emergency response
• Supply chain monitoring
– Manufacturing flows, asset tracking
• Context aware computing
– Information beacons
Ralph Kling, „Intel® Mote & Sensor Networks”, Intel
(C) Z.Pióro, WMS_w8, zima 2008, slajd 32
Diagnostyka zachowawcza w fabryce półprzewodników (Intel)
Maszyna w fabryce
Mot + czujniki wibracji
Sieć „ad hoc”motów
Intranet
802.11 Mesh
Izolacja intranetu
Root Node
� Uszkodzenia urządzeń produkcyjnych w fabryce są bardzo kosztowne– Przewidzenie i wykonanie zaplanowanej naprawy
� Typowa fabryka ma ~5.000 czujników wibracji– Pompy, płuczki, …– Elektrycy zbierają dane „ręcznie” kilka razy w roku – Próbkowanie: 10-tki kHz, duŜa dokładność, kilka sekund
(C) Z.Pióro, WMS_w8, zima 2008, slajd 33
Smart Dust – TELOS
(C) Z.Pióro, WMS_w8, zima 2008, slajd 34
Smart Dust – TELOS
CC2420 Radio2.4 GHz
zgodne z IEEE 802.15.4
SPI I/O
Antena PCB
Gniazdo SMA
Silicon Serial ID1-wire
Czujnik wilgotności i temperatury
Czujnik PAR
Czujnik TSR
JTAG 8-pin2mm IDC header
Mikrokontroler TI MSP430
USB 2.0UART/RS232Functionality
ST Flash1024k (2.7V)
SVS 2-pinIDC header
10-pin + 6-pin
IDChe
ader
ADC[4]
ADC[5]
I/O
Power
JTAG
JTAG
RTS/DTRRX/TX
Write Protection
Power
UART[0]
SVSout
SVSin
User
Reset
GPIO
ADC[0-3,6-7]I2C[0]
4 6
46
2
2
4
7
P1[0,3,4]P4[1,5,6]
SPI[0]
UART[1]P1.1/P2.2
ResetTCK I2C[0] SPI[0]
PAR - PhotosyntheticallyActive Radiation
TSR - Total SolarRadiation
www.moteiv.comwww.moteiv.com
Płytka „córka” z dodatkowymi interfejsami, sensorami, zasilaniem
(C) Z.Pióro, WMS_w8, zima 2008, slajd 35
Rzut oka na Telos-a
� Transceiver radiowy Chipcon CC2420, 250kbps, 2,4GHz, IEEE 802.15.4- kompatybilny z innymi urządzeniami IEEE 802.15.4
� Mikrokontroler Texas Instruments MSP430xxx: 8 MHz, 10 k RAM, 48 k Flash
� Zintegrowane ADC, DAC, Supply Voltage Supervisor i kontroler DMA� Zintegrowana antena na płytce: 50m wewnątrz / 125m na zewnątrz� Zintegrowane: sensor wilgotności i temperatury oraz sensory
oświetlenia� Sprzętowe szyfrowanie i autentykacja (AES)� Programowanie i zbieranie danych przez USB� 16-stykowe gniazdo rozszerzające i opcjonalne gniazdo SMA anteny � System operacyjny TinyOS: implementacja komunikacji i sieci typu
„mesh”
www.moteiv.comwww.moteiv.com (C) Z.Pióro, WMS_w8, zima 2008, slajd 36
Smart Dust - TELOS
gniazdo USB
LED nadajnika USB
Przycisk „User”
Przycisk „Reset”
Czujnik „PhotosyntheticallyActive Radiation”
Czujnik „Total SolarRadiation”
Czujnik wilgotności i temperatury
6-stykowe gniazdo rozszerzające 10-stykowe gniazdo
rozszerzające
Antena wewnętrzna
Gniazdo antenowe SMA(opcjonalna)
RadioCC2420
Klucze cyfrowe izolujące USB od mikrokontrolera
Mikrokontroler USB
Gniazdo JTAGLED-y
LED odbiornika USB
www.moteiv.comwww.moteiv.comTo jest konstrukcja „development”
7
(C) Z.Pióro, WMS_w8, zima 2008, slajd 37
Smart Dust - TELOS
2 kontakty SVS
Pamięć Flash USB (2kB)
48-bitowy „siliconserial ID”
Pamięć Flashprogramu (1MB)
oscylator 32kHz
Mikrokontroler MSP430F1611
Texas Instruments
65,5 mm
32,2 mm
SVS – SupplyVoltageSupervisor
www.moteiv.comwww.moteiv.com (C) Z.Pióro, WMS_w8, zima 2008, slajd 38
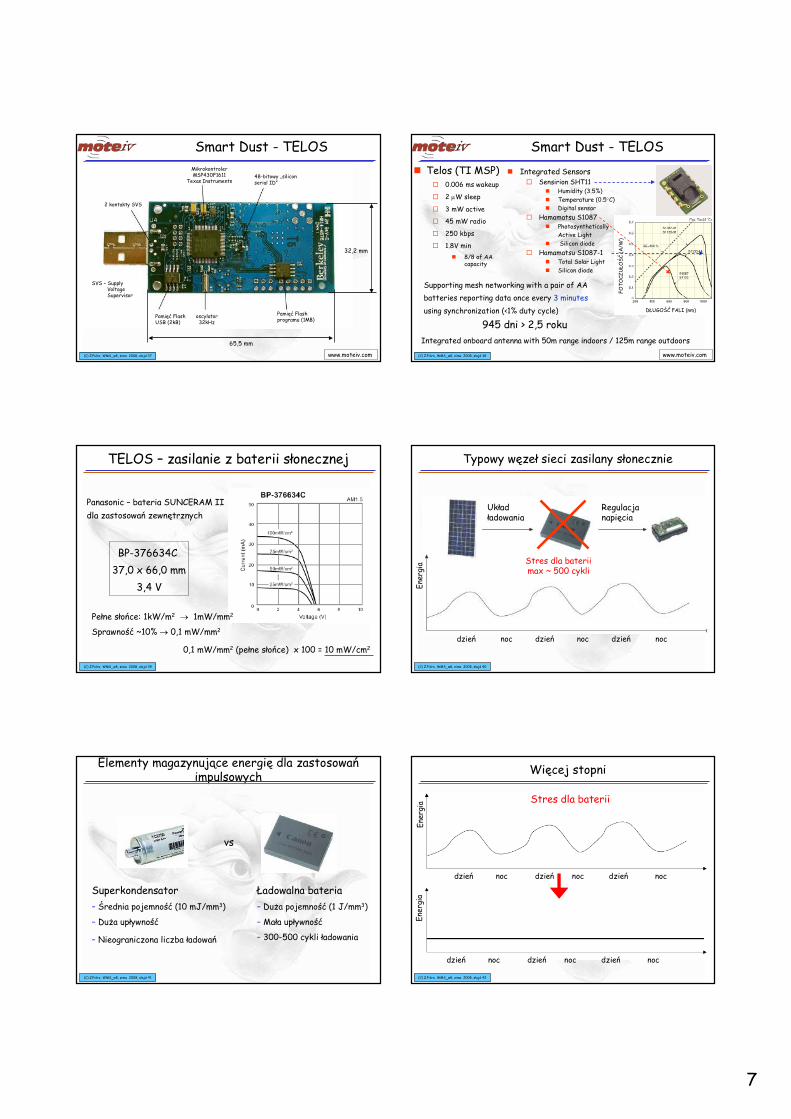
Smart Dust - TELOS� Telos (TI MSP)
� 0.006 ms wakeup
� 2 µW sleep
� 3 mW active
� 45 mW radio
� 250 kbps
� 1.8V min� 8/8 of AA
capacity
Supporting mesh networking with a pair of AA batteries reporting data once every 3 minutes
using synchronization (<1% duty cycle)
945 dni > 2,5 roku
� Integrated Sensors� Sensirion SHT11
� Humidity (3.5%)� Temperature (0.5°C)� Digital sensor
� Hamamatsu S1087� Photosynthetically
Active Light� Silicon diode
� Hamamatsu S1087-1� Total Solar Light� Silicon diode
DŁUGOŚĆ FALI (nm)
FOTOCZ
UŁO
ŚĆ (A
/W)
Integrated onboard antenna with 50m range indoors / 125m range outdoors
www.moteiv.comwww.moteiv.com
(C) Z.Pióro, WMS_w8, zima 2008, slajd 39
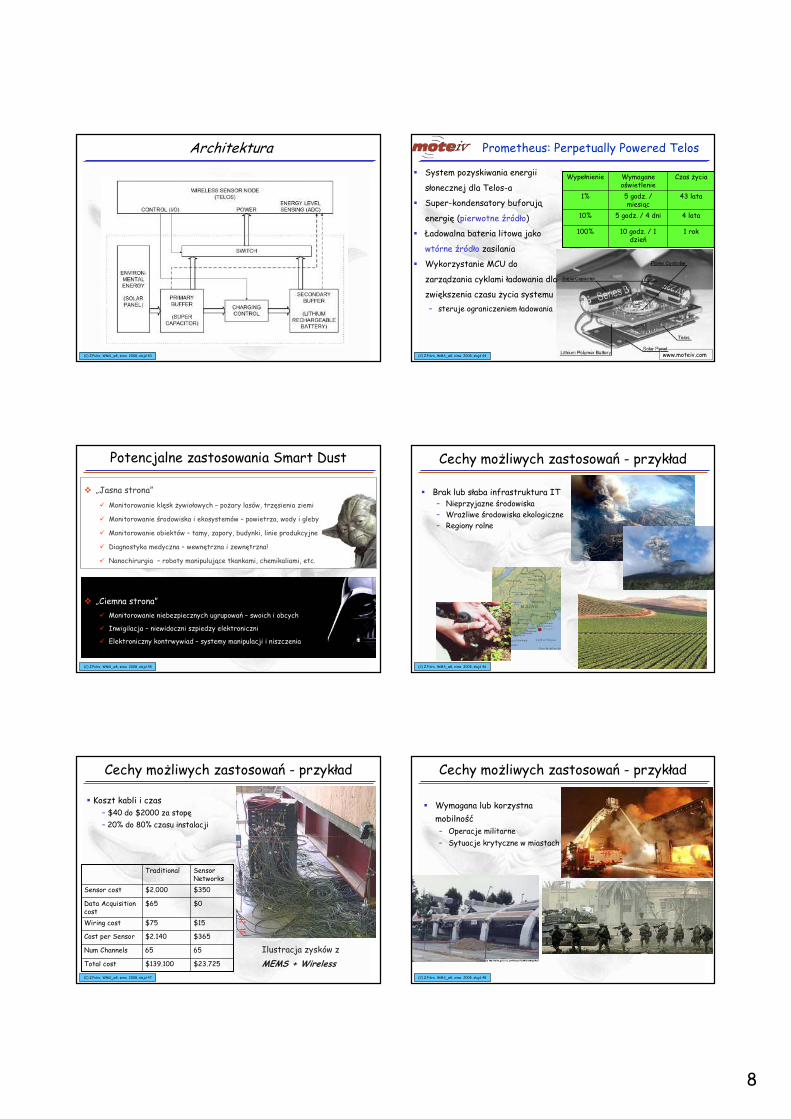
TELOS – zasilanie z baterii słonecznej
BP-376634C 37,0 x 66,0 mm
3,4 V
Panasonic – bateria SUNCERAM II dla zastosowań zewnętrznych
0,1 mW/mm2 (pełne słońce) x 100 = 10 mW/cm2
Pełne słońce: 1kW/m2 → 1mW/mm2
Sprawność ~10% → 0,1 mW/mm2
(C) Z.Pióro, WMS_w8, zima 2008, slajd 40
Typowy węzeł sieci zasilany słonecznie
Układ ładowania
Regulacja napięcia
dzień noc dzień noc dzień noc
Energia Stres dla baterii
max ~ 500 cykli
(C) Z.Pióro, WMS_w8, zima 2008, slajd 41
Elementy magazynujące energię dla zastosowań impulsowych
Superkondensator– Średnia pojemność (10 mJ/mm3)
– DuŜa upływność
– Nieograniczona liczba ładowań
Ładowalna bateria – DuŜa pojemność (1 J/mm3)
– Mała upływność
– 300-500 cykli ładowania
vs
(C) Z.Pióro, WMS_w8, zima 2008, slajd 42
Więcej stopni
Stres dla baterii
Energia
Energia
dzień noc dzień noc dzień noc
dzień noc dzień noc dzień noc
8
(C) Z.Pióro, WMS_w8, zima 2008, slajd 43
Architektura
(C) Z.Pióro, WMS_w8, zima 2008, slajd 44
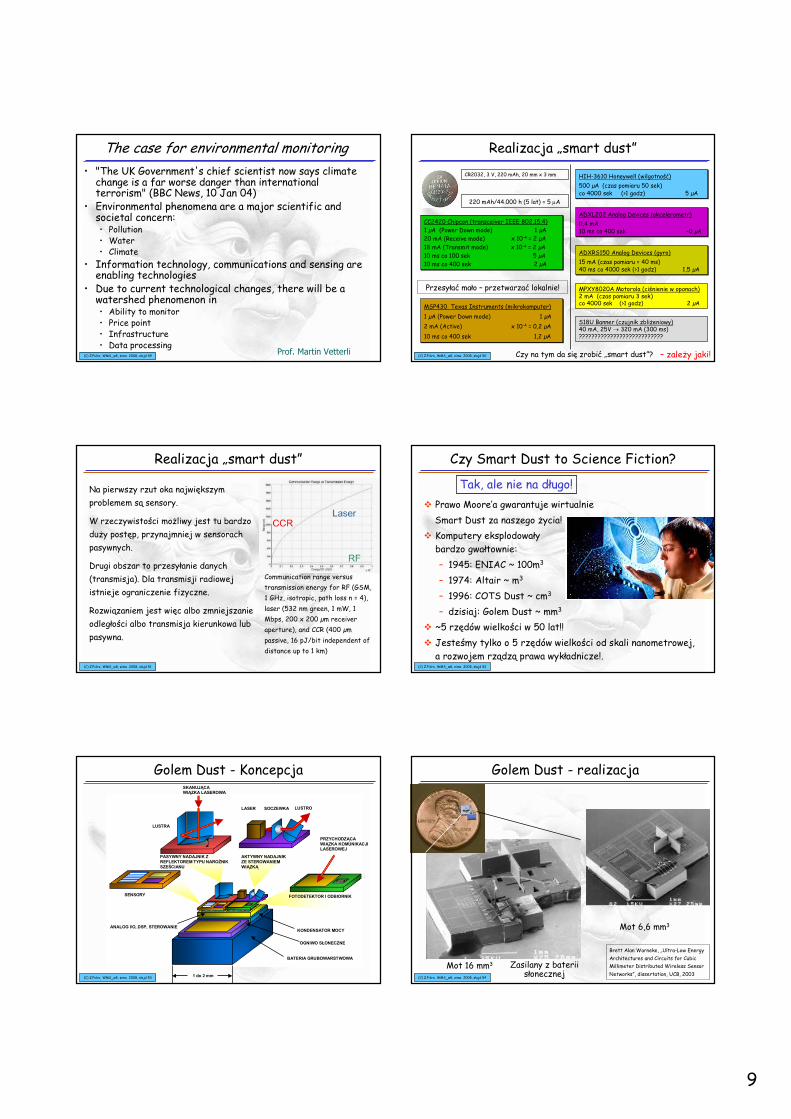
Prometheus: Perpetually Powered Telos
1 rok10 godz. / 1dzień
100%
4 lata5 godz. / 4 dni10%
43 lata5 godz. / miesiąc
1%
Czas ŜyciaWymagane oświetlenie
Wypełnienie
www.moteiv.comwww.moteiv.com
� System pozyskiwania energii
słonecznej dla Telos-a
� Super-kondensatory buforują
energię (pierwotne źródło)
� Ładowalna bateria litowa jako
wtórne źródło zasilania
� Wykorzystanie MCU do
zarządzania cyklami ładowania dla
zwiększenia czasu Ŝycia systemu– steruje ograniczeniem ładowania
(C) Z.Pióro, WMS_w8, zima 2008, slajd 45
Potencjalne zastosowania Smart Dust
� „Ciemna strona”� Monitorowanie niebezpiecznych ugrupowań – swoich i obcych
� Inwigilacja – niewidoczni szpiedzy elektroniczni
� Elektroniczny kontrwywiad – systemy manipulacji i niszczenia
� „Jasna strona”
� Monitorowanie klęsk Ŝywiołowych – poŜary lasów, trzęsienia ziemi
� Monitorowanie środowiska i ekosystemów – powietrza, wody i gleby
� Monitorowanie obiektów – tamy, zapory, budynki, linie produkcyjne
� Diagnostyka medyczna – wewnętrzna i zewnętrzna!
� Nanochirurgia – roboty manipulujące tkankami, chemikaliami, etc.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 46
Cechy moŜliwych zastosowań - przykład
� Brak lub słaba infrastruktura IT– Nieprzyjazne środowiska– WraŜliwe środowiska ekologiczne– Regiony rolne
(C) Z.Pióro, WMS_w8, zima 2008, slajd 47
Cechy moŜliwych zastosowań - przykład
� Koszt kabli i czas– $40 do $2000 za stopę– 20% do 80% czasu instalacji
$23.725$139.100Total cost
6565Num Channels
$365$2.140Cost per Sensor
$15$75Wiring cost
$0$65Data Acquisition cost
$350$2.000Sensor cost
Sensor Networks
Traditional
Ilustracja zysków z MEMS + Wireless
(C) Z.Pióro, WMS_w8, zima 2008, slajd 48
Cechy moŜliwych zastosowań - przykład
� Wymagana lub korzystna mobilność– Operacje militarne– Sytuacje krytyczne w miastach
9
(C) Z.Pióro, WMS_w8, zima 2008, slajd 49
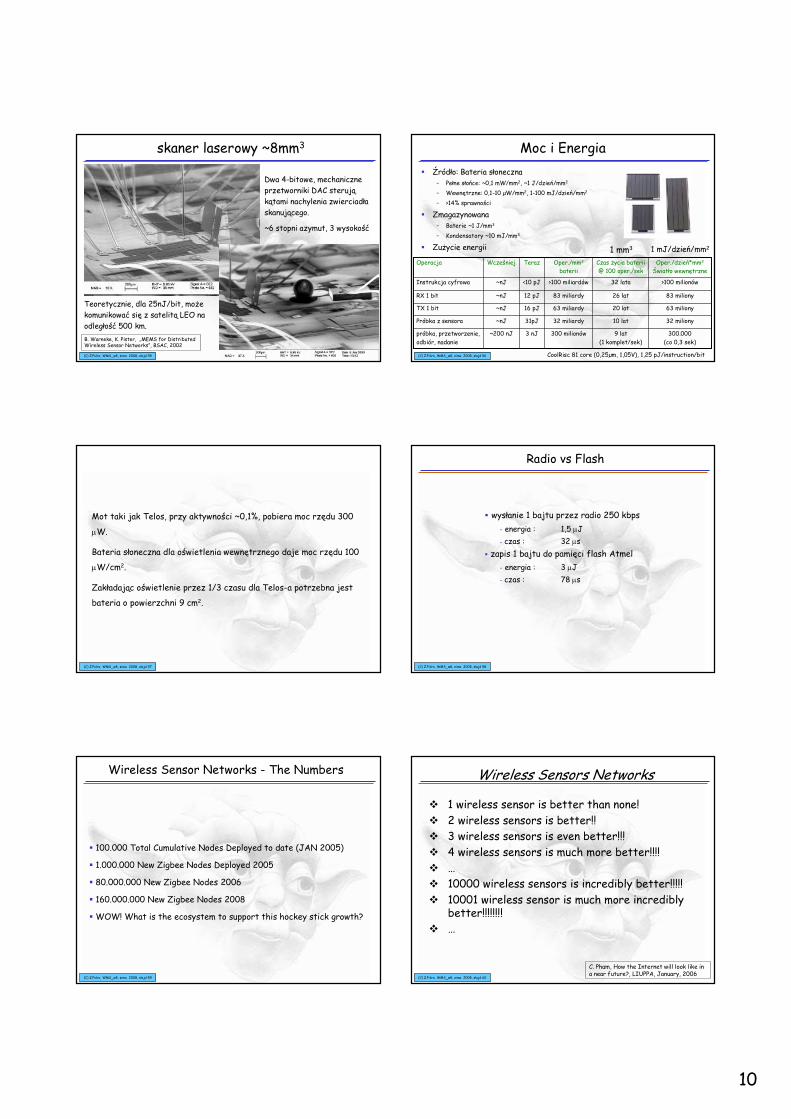
The case for environmental monitoring• "The UK Government's chief scientist now says climate
change is a far worse danger than international terrorism" (BBC News, 10 Jan 04)
• Environmental phenomena are a major scientific and societal concern: • Pollution • Water • Climate
• Information technology, communications and sensing are enabling technologies
• Due to current technological changes, there will be a watershed phenomenon in • Ability to monitor • Price point • Infrastructure • Data processing
Prof. Martin Vetterli(C) Z.Pióro, WMS_w8, zima 2008, slajd 50
Realizacja „smart dust”
CR2032, 3 V, 220 mAh, 20 mm x 3 mm
220 mAh/44.000 h (5 lat) = 5 µA
CC2420 Chipcon (transceiver IEEE 802.15.4)1 µA (Power Down mode) 1 µA 20 mA (Receive mode) x 10-4 = 2 µA 18 mA (Transmit mode) x 10-4 = 2 µA 10 ms co 100 sek 5 µA10 ms co 400 sek 2 µA
CC2420 Chipcon (transceiver IEEE 802.15.4)1 µA (Power Down mode) 1 µA 20 mA (Receive mode) x 10-4 = 2 µA 18 mA (Transmit mode) x 10-4 = 2 µA 10 ms co 100 sek 5 µA10 ms co 400 sek 2 µA
MSP430 Texas Instruments (mikrokomputer)1 µA (Power Down mode) 1 µA 2 mA (Active) x 10-4 = 0,2 µA
10 ms co 400 sek 1,2 µA
MSP430 Texas Instruments (mikrokomputer)1 µA (Power Down mode) 1 µA 2 mA (Active) x 10-4 = 0,2 µA
10 ms co 400 sek 1,2 µA
ADXRS150 Analog Devices (gyro)15 mA (czas pomiaru = 40 ms)40 ms co 4000 sek (>1 godz) 1,5 µA
ADXRS150 Analog Devices (gyro)15 mA (czas pomiaru = 40 ms)40 ms co 4000 sek (>1 godz) 1,5 µA
ADXL202 Analog Devices (akcelerometr)0,4 mA 10 ms co 400 sek ~0 µA
ADXL202 Analog Devices (akcelerometr)0,4 mA 10 ms co 400 sek ~0 µA
HIH-3610 Honeywell (wilgotność)500 µA (czas pomiaru 50 sek)co 4000 sek (>1 godz) 5 µA
HIH-3610 Honeywell (wilgotność)500 µA (czas pomiaru 50 sek)co 4000 sek (>1 godz) 5 µA
MPXY8020A Motorola (ciśnienie w oponach)2 mA (czas pomiaru 3 sek)co 4000 sek (>1 godz) 2 µA
S18U Banner (czujnik zbliŜeniowy)40 mA, 25V → 320 mA (300 ms)???????????????????????????
Czy na tym da się zrobić „smart dust”?
Przesyłać mało – przetwarzać lokalnie!
– zaleŜy jaki!
(C) Z.Pióro, WMS_w8, zima 2008, slajd 51
Realizacja „smart dust”
Na pierwszy rzut oka największym problemem są sensory.
W rzeczywistości moŜliwy jest tu bardzo duŜy postęp, przynajmniej w sensorach pasywnych.
Drugi obszar to przesyłanie danych (transmisja). Dla transmisji radiowej istnieje ograniczenie fizyczne.
Rozwiązaniem jest więc albo zmniejszanie odległości albo transmisja kierunkowa lub pasywna.
Communication range versus transmission energy for RF (GSM, 1 GHz, isotropic, path loss n = 4), laser (532 nm green, 1 mW, 1 Mbps, 200 x 200 µm receiveraperture), and CCR (400 µm passive, 16 pJ/bit independent of distance up to 1 km)
(C) Z.Pióro, WMS_w8, zima 2008, slajd 52
Czy Smart Dust to Science Fiction?
Tak, ale nie na długo!� Prawo Moore’a gwarantuje wirtualnie
Smart Dust za naszego Ŝycia!� Komputery eksplodowały
bardzo gwałtownie:
– 1945: ENIAC ~ 100m3
– 1974: Altair ~ m3
– 1996: COTS Dust ~ cm3
– dzisiaj: Golem Dust ~ mm3
� ~5 rzędów wielkości w 50 lat!!
� Jesteśmy tylko o 5 rzędów wielkości od skali nanometrowej,a rozwojem rządzą prawa wykładnicze!.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 53
Golem Dust - Koncepcja
LUSTRA
SKANUJĄCA WIĄZKA LASEROWA
LASER SOCZEWKA LUSTRO
PASYWNY NADAJNIK ZREFLEKTOREM TYPU NAROśNIK SZEŚCIANU
AKTYWNY NADAJNIKZE STEROWANIEM WIĄZKĄ
PRZYCHODZĄCA WIĄZKA KOMUNIKACJI LASEROWEJ
FOTODETEKTOR I ODBIORNIK
KONDENSATOR MOCY
OGNIWO SŁONECZNE
BATERIA GRUBOWARSTWOWA
1 do 2 mm
SENSORY
ANALOG I/O, DSP, STEROWANIE
(C) Z.Pióro, WMS_w8, zima 2008, slajd 54
Golem Dust - realizacja
Mot 16 mm3
Mot 6,6 mm3
Zasilany z baterii słonecznej
Brett Alan Warneke, „Ultra-Low EnergyArchitectures and Circuits for CubicMillimeter Distributed Wireless Sensor Networks”, dissertation, UCB, 2003
10
(C) Z.Pióro, WMS_w8, zima 2008, slajd 55
skaner laserowy ~8mm3
Dwa 4-bitowe, mechaniczne przetworniki DAC sterują kątami nachylenia zwierciadła skanującego.
~6 stopni azymut, 3 wysokość
Teoretycznie, dla 25nJ/bit, moŜe komunikować się z satelitą LEO na odległość 500 km.B. Warneke, K. Pister, „MEMS for Distributed Wireless Sensor Networks”, BSAC, 2002
(C) Z.Pióro, WMS_w8, zima 2008, slajd 56
Moc i Energia� Źródło: Bateria słoneczna
– Pełne słońce: ~0,1 mW/mm2, ~1 J/dzień/mm2
– Wewnętrzne: 0,1-10 µW/mm2, 1-100 mJ/dzień/mm2
– >14% sprawności
� Zmagazynowana– Baterie ~1 J/mm3
– Kondensatory ~10 mJ/mm3
� ZuŜycie energii
300.000 (co 0,3 sek)
9 lat (1 komplet/sek)
300 milionów3 nJ~200 nJpróbka, przetworzenie,odbiór, nadanie
32 miliony10 lat32 miliardy 31pJ~nJPróbka z sensora
63 miliony20 lat63 miliardy 16 pJ~nJTX 1 bit
83 miliony26 lat83 miliardy 12 pJ~nJRX 1 bit
>100 milionów32 lata>100 miliardów <10 pJ~nJInstrukcja cyfrowa
Oper./dzień*mm2
Światło wewnętrzneCzas Ŝycia baterii @ 100 oper./sek
Oper./mm3
bateriiTerazWcześniejOperacja
1 mm3 1 mJ/dzień/mm2
CoolRisc 81 core (0,25µm, 1,05V), 1,25 pJ/instruction/bit
(C) Z.Pióro, WMS_w8, zima 2008, slajd 57
Mot taki jak Telos, przy aktywności ~0,1%, pobiera moc rzędu 300
µW.
Bateria słoneczna dla oświetlenia wewnętrznego daje moc rzędu 100
µW/cm2.
Zakładając oświetlenie przez 1/3 czasu dla Telos-a potrzebna jest
bateria o powierzchni 9 cm2.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 58
Radio vs Flash
� wysłanie 1 bajtu przez radio 250 kbps– energia : 1,5 µJ– czas : 32 µs
� zapis 1 bajtu do pamięci flash Atmel– energia : 3 µJ– czas : 78 µs
(C) Z.Pióro, WMS_w8, zima 2008, slajd 59
Wireless Sensor Networks - The Numbers
� 100.000 Total Cumulative Nodes Deployed to date (JAN 2005)
� 1.000.000 New Zigbee Nodes Deployed 2005
� 80.000.000 New Zigbee Nodes 2006
� 160.000.000 New Zigbee Nodes 2008
� WOW! What is the ecosystem to support this hockey stick growth?
(C) Z.Pióro, WMS_w8, zima 2008, slajd 60
Wireless Sensors Networks
� 1 wireless sensor is better than none!� 2 wireless sensors is better!!� 3 wireless sensors is even better!!!� 4 wireless sensors is much more better!!!!� …� 10000 wireless sensors is incredibly better!!!!!� 10001 wireless sensor is much more incredibly
better!!!!!!!!� …
C. Pham, How the Internet will look like in a near future?, LIUPPA, January, 2006
11
(C) Z.Pióro, WMS_w8, zima 2008, slajd 61
Berkeley Wireless Research Center (BWRC)� A partnership of UC researchers, industry, and government
� Participating Members:.–Agilent Technologies.–Infineon Technologies.–Intel Corporation.–STMicroelectronics.–Hitachi Ltd.–Hewlett Packard.–Sun Microelectronics
� Associate Members:–Atmel Corporation–Cadence–Ericsson Radio Systems –Samsung–NEC–Qualcomm Incorporated
� Other Funding: DARPA, NSF, ONR, MARCO, MURI
� Operational since Feb. 1999� Downtown Berkeley, 1 block from campus
� 11,000 sq. feet� 55 graduate students, 5 technical staff, 8 faculty
Overall budget: > 5 M$/year
(C) Z.Pióro, WMS_w8, zima 2008, slajd 62
The Center Goals
� Pre-competitive research – beyond 5 years� In close collaboration with industrial partners� Focus on silicon (CMOS) implementation
– Explore novel and disruptive paradigms – Determine relationship between theoretical and algorithmic
advances and implementation– Understand tradeoffs between various implementation
architectures with respect to performance, power and cost– Realize concept-proving prototypes using rapid design flow
from algorithm to implementation
(C) Z.Pióro, WMS_w8, zima 2008, slajd 63
CodeBlue: Wireless Sensor Networks for Medical Care
Division of Engineering and Applied Sciences, Harvard University
In collaboration with:
Boston Medical Center
Spaulding Rehabilitation Hospital
10Blade, Inc.
Boston University School of Management
AID-N, Johns Hopkins Applied Physics Laboratory
(C) Z.Pióro, WMS_w8, zima 2008, slajd 64
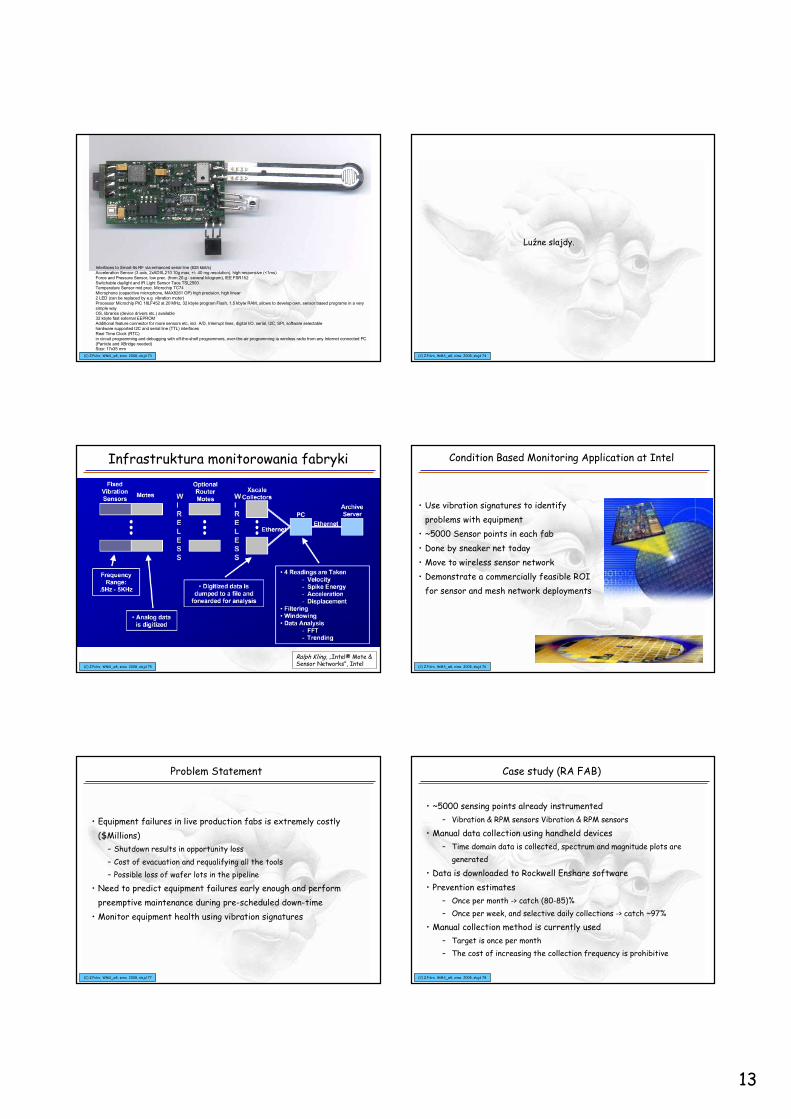
Wireless pulse oximeter sensor
(C) Z.Pióro, WMS_w8, zima 2008, slajd 65
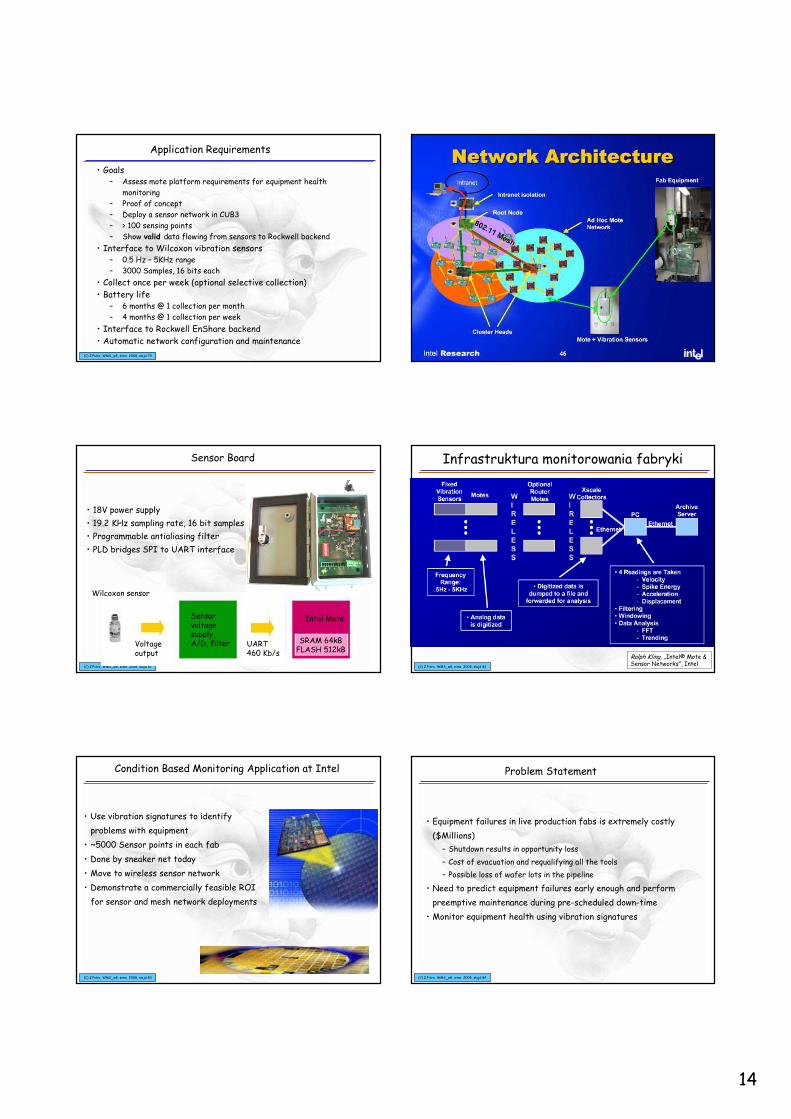
Wireless two-lead EKG
(C) Z.Pióro, WMS_w8, zima 2008, slajd 66
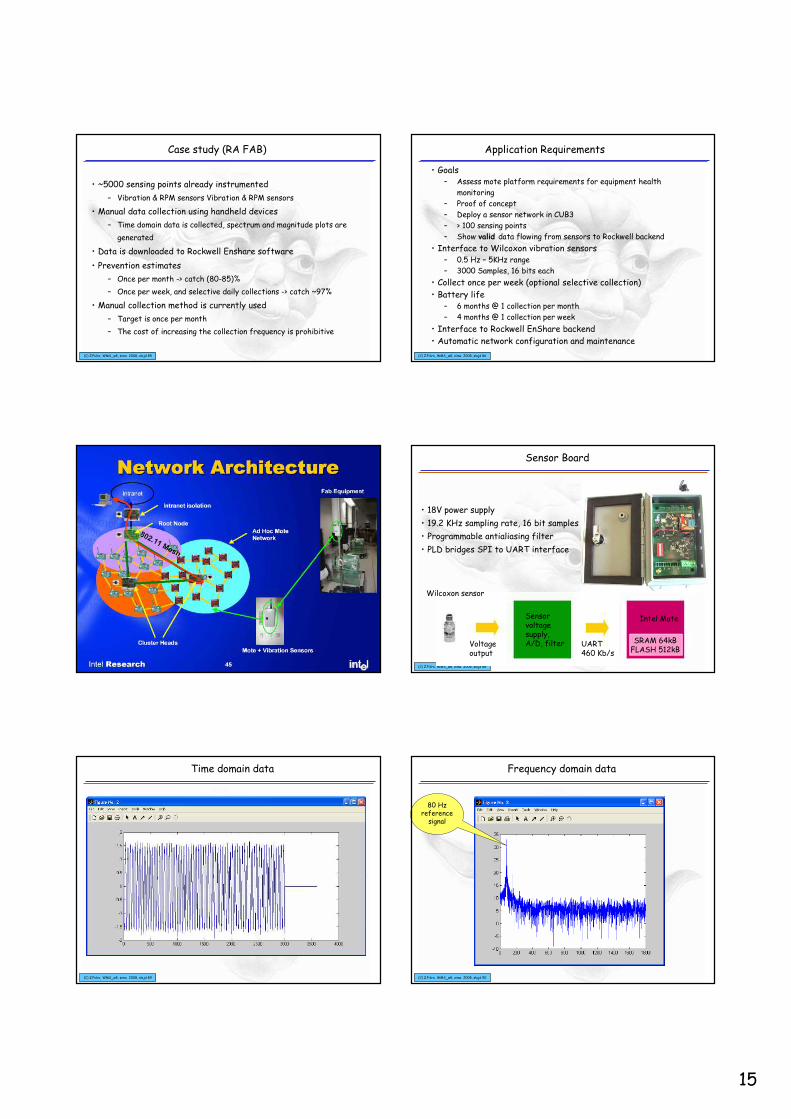
Accelerometer, gyroscope, and electromyogram (EMG) sensor for stroke patient monitoring

12
(C) Z.Pióro, WMS_w8, zima 2008, slajd 67
The Harvard "Pluto" mote, designed to be small and wearable
(C) Z.Pióro, WMS_w8, zima 2008, slajd 68
Pluto mote in case
(C) Z.Pióro, WMS_w8, zima 2008, slajd 69
Pluto mote with case and wriststrap.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 70
Directional Virtual Fencing (DVF)
Current situation:
Global challenge for many of the world’s
4 x 109 domestic animals
that forage on some of the world’s
13 x 109 hectares.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 71
Directional Virtual Fencing (DVF)
Directional Virtual Fencing (DVFTM) defines a novel, new methodology for the control of animals. It involves the control of animal location and direction of movement through the application of ramped audio and or electric shock cues applied to either theanimal’s right or left side to initiate directional movement.
DVFTM combines physics, electronics, biology and ecology to firstdetermine the animal’s location on the landscape using Global Positioning System (GPS) technology, and second using GeographicInformation System (GIS) data to direct the animal to the properlocation, when necessary.
DVFTM capitalizes on animal behavior to accomplish a change in theanimal’s location through instrumental animal conditioning usingprogrammable cues that are applied autonomously in a manner consistent with low-stress animal handling procedures in static, as well as moving Virtual Paddocks (VPTM).
(C) Z.Pióro, WMS_w8, zima 2008, slajd 72
Directional Virtual Fencing (DVF)A schematic representation of how Directional Virtual Fencing (DVFTM) operates with a programmable Virtual Boundary (VBTM) that activates a series of cues ramped from least severe (audio sound only) at the VBTM perimeter that defines a Virtual Paddock (VPTM) to most severe (audio sound + electric shock) on either side of the Virtual Center Line (VCLTM).
Cues are applied to either the animal’s right or left side depending on the angle of the animal’s head with respect to the VCLTMonce the VBTM is penetrated.
The animal’s movement that results from these cues should put the greatest distance between the animal and the VCLTMin the shortest amount of travel, and with the least amount of stress.
13
(C) Z.Pióro, WMS_w8, zima 2008, slajd 73
Interfaces to Smart-Its RF via enhanced serial line (625 kbit/s)
Acceleration Sensor (3 axis, 2xADXL210 10g max, +/- 40 mg resolution), high responsive (<1ms)
Force and Pressure Sensor, low prec. (from 20 g - several kilogram), IEE FSR152
Switchable daylight and IR Light Sensor Taos TSL2500 Temperature Sensor mid prec. Microchip TC74
Microphone (capacitive microphone, MAX8261 OP) high precision, high linear
2 LED (can be replaced by e.g. vibration motor)
Processor Microchip PIC 18LF452 at 20 MHz, 32 kbyte program Flash, 1.5 kbyte RAM, allows to develop own, sensor based programs in a very
simple way
OS, libraries (device drivers etc.) available 32 kbyte fast external EEPROM
Additional feature connector for more sensors etc, incl. A/D, Interrupt lines, digital I/O, serial, I2C, SPI, software selectable
hardware supported I2C and serial line (TTL) interfaces
Real Time Clock (RTC)
in circuit programming and debugging with off-the-shelf programmers, over-the-air programming ia wireless radio from any Internet connected PC
(Particle and XBridge needed) Size: 17x35 mm
(C) Z.Pióro, WMS_w8, zima 2008, slajd 74
Luźne slajdy.
(C) Z.Pióro, WMS_w8, zima 2008, slajd 75
Infrastruktura monitorowania fabryki
Ralph Kling, „Intel® Mote & Sensor Networks”, Intel (C) Z.Pióro, WMS_w8, zima 2008, slajd 76
Condition Based Monitoring Application at Intel
• Use vibration signatures to identify problems with equipment
• ~5000 Sensor points in each fab
• Done by sneaker net today • Move to wireless sensor network • Demonstrate a commercially feasible ROI for sensor and mesh network deployments
(C) Z.Pióro, WMS_w8, zima 2008, slajd 77
Problem Statement
• Equipment failures in live production fabs is extremely costly ($Millions)
– Shutdown results in opportunity loss
– Cost of evacuation and requalifying all the tools– Possible loss of wafer lots in the pipeline
• Need to predict equipment failures early enough and perform preemptive maintenance during pre-scheduled down-time
• Monitor equipment health using vibration signatures
(C) Z.Pióro, WMS_w8, zima 2008, slajd 78
Case study (RA FAB)
• ~5000 sensing points already instrumented– Vibration & RPM sensors Vibration & RPM sensors
• Manual data collection using handheld devices– Time domain data is collected, spectrum and magnitude plots are
generated
• Data is downloaded to Rockwell Enshare software• Prevention estimates
– Once per month -> catch (80-85)%– Once per week, and selective daily collections -> catch ~97%
• Manual collection method is currently used – Target is once per month – The cost of increasing the collection frequency is prohibitive
14
(C) Z.Pióro, WMS_w8, zima 2008, slajd 79
Application Requirements
• Goals– Assess mote platform requirements for equipment health
monitoring– Proof of concept– Deploy a sensor network in CUB3– > 100 sensing points– Show valid data flowing from sensors to Rockwell backend
• Interface to Wilcoxon vibration sensors – 0.5 Hz – 5KHz range – 3000 Samples, 16 bits each
• Collect once per week (optional selective collection) • Battery life
– 6 months @ 1 collection per month – 4 months @ 1 collection per week
• Interface to Rockwell EnShare backend• Automatic network configuration and maintenance
(C) Z.Pióro, WMS_w8, zima 2008, slajd 80
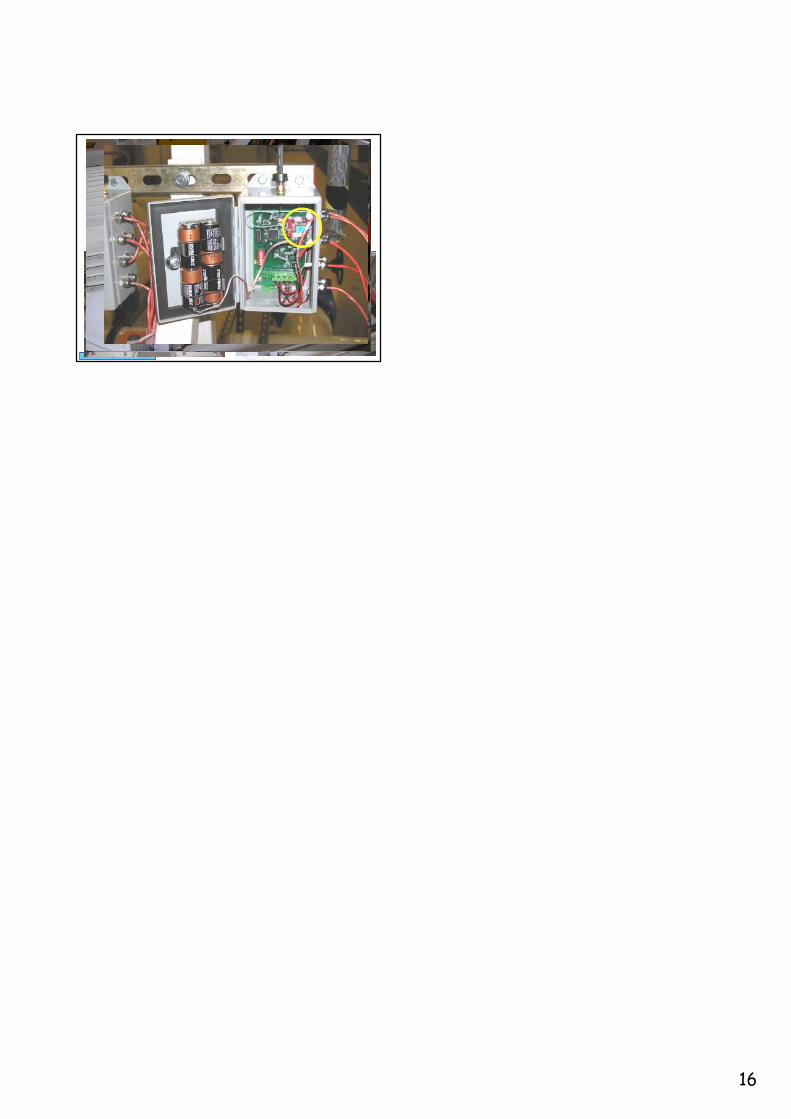
(C) Z.Pióro, WMS_w8, zima 2008, slajd 81
Sensor Board
• 18V power supply• 19.2 KHz sampling rate, 16 bit samples • Programmable antialiasing filter • PLD bridges SPI to UART interface
Wilcoxon sensor
Sensorvoltagesupply,A/D, filterVoltage
outputUART460 Kb/s
Intel Mote
SRAM 64kBFLASH 512kB
(C) Z.Pióro, WMS_w8, zima 2008, slajd 82
Infrastruktura monitorowania fabryki
Ralph Kling, „Intel® Mote & Sensor Networks”, Intel
(C) Z.Pióro, WMS_w8, zima 2008, slajd 83
Condition Based Monitoring Application at Intel
• Use vibration signatures to identify problems with equipment
• ~5000 Sensor points in each fab
• Done by sneaker net today • Move to wireless sensor network • Demonstrate a commercially feasible ROI for sensor and mesh network deployments
(C) Z.Pióro, WMS_w8, zima 2008, slajd 84
Problem Statement
• Equipment failures in live production fabs is extremely costly ($Millions)
– Shutdown results in opportunity loss
– Cost of evacuation and requalifying all the tools– Possible loss of wafer lots in the pipeline
• Need to predict equipment failures early enough and perform preemptive maintenance during pre-scheduled down-time
• Monitor equipment health using vibration signatures
15
(C) Z.Pióro, WMS_w8, zima 2008, slajd 85
Case study (RA FAB)
• ~5000 sensing points already instrumented– Vibration & RPM sensors Vibration & RPM sensors
• Manual data collection using handheld devices– Time domain data is collected, spectrum and magnitude plots are
generated
• Data is downloaded to Rockwell Enshare software• Prevention estimates
– Once per month -> catch (80-85)%– Once per week, and selective daily collections -> catch ~97%
• Manual collection method is currently used – Target is once per month – The cost of increasing the collection frequency is prohibitive
(C) Z.Pióro, WMS_w8, zima 2008, slajd 86
Application Requirements
• Goals– Assess mote platform requirements for equipment health
monitoring– Proof of concept– Deploy a sensor network in CUB3– > 100 sensing points– Show valid data flowing from sensors to Rockwell backend
• Interface to Wilcoxon vibration sensors – 0.5 Hz – 5KHz range – 3000 Samples, 16 bits each
• Collect once per week (optional selective collection) • Battery life
– 6 months @ 1 collection per month – 4 months @ 1 collection per week
• Interface to Rockwell EnShare backend• Automatic network configuration and maintenance
(C) Z.Pióro, WMS_w8, zima 2008, slajd 87 (C) Z.Pióro, WMS_w8, zima 2008, slajd 88
Sensor Board
• 18V power supply• 19.2 KHz sampling rate, 16 bit samples • Programmable antialiasing filter • PLD bridges SPI to UART interface
Wilcoxon sensor
Sensorvoltagesupply,A/D, filterVoltage
outputUART460 Kb/s
Intel Mote
SRAM 64kBFLASH 512kB
(C) Z.Pióro, WMS_w8, zima 2008, slajd 89
Time domain data
(C) Z.Pióro, WMS_w8, zima 2008, slajd 90
Frequency domain data
80 Hzreference
signal
16
(C) Z.Pióro, WMS_w8, zima 2008, slajd 91