ALGEBRA Tematyka LITERATURA - lisiecki.org.pl · 2. det(A·B) = det(B·A) = detA·detB. Twierdzenie...
33
ALGEBRA Tematyka Podstawowe pojęcia algebry: dzialania, wlasności dzialań. Struktury algebraiczne: grupy, pierścienie, ciala, przestrzenie liniowe. Ciala liczbowe: cialo liczb wymiernych, cialo liczb rzeczywistych, cialo liczb zespolonych. Algebra macierzy. Definicja i wlasności wyznacz- ników. Rozklady macierzy. Uklady równań liniowych. Twierdzenie Cramera. Twierdzenie Kroneckera-Capelliego. Wektory, dzialania na wektorach, iloczyny wektorów. Plaszczyzna i prosta. Sfera i okrąg w przestrzeni. Powierzchnie w przestrzeni. Definicja i przyklady prze- strzeni liniowych. Liniowa niezależność wektorów, baza i wymiar, wspólrzędne wektora w bazie. Przeksztalcenia liniowe. Wartości wlasne i wektory wlasne, wielomian charaktery- styczny. Diagonalizacja macierzy. Przyklady zastosowań algebry. LITERATURA 1. K.Lisiecki - Elementy algebry i geometrii analitycznej, wyd. SCIRE, Lódź, 2012 2. T. Jurlewicz, Z. Skoczylas - Algebra liniowa 1. Definicje, twierdzenia, wzory. Wyd. GiS, Wroclaw, 2002 3. T. Jurlewicz, Z. Skoczylas - Algebra liniowa 1. Przyklady i zadania. Wyd. GiS, Wro- claw, 2002 4. J. Klukowski, I. Nabialek - Algebra dla studentów, Wydawnictwo Naukowo-Techniczne, Warszawa, 1999 5. http://wazniak.mimuw.edu.pl 6. K.F. Riley, M.P. Hobson, S.J. Bence - Mathematical methods for physics and engi- neering, Cambridge University Press, 2003 1
Transcript of ALGEBRA Tematyka LITERATURA - lisiecki.org.pl · 2. det(A·B) = det(B·A) = detA·detB. Twierdzenie...
ALGEBRA
TematykaPodstawowe pojęcia algebry: działania, własności działań. Struktury algebraiczne: grupy,pierścienie, ciała, przestrzenie liniowe. Ciała liczbowe: ciało liczb wymiernych, ciało liczbrzeczywistych, ciało liczb zespolonych. Algebra macierzy. Definicja i własności wyznacz-ników. Rozkłady macierzy. Układy równań liniowych. Twierdzenie Cramera. TwierdzenieKroneckera-Capelliego. Wektory, działania na wektorach, iloczyny wektorów. Płaszczyzna iprosta. Sfera i okrąg w przestrzeni. Powierzchnie w przestrzeni. Definicja i przykłady prze-strzeni liniowych. Liniowa niezależność wektorów, baza i wymiar, współrzędne wektora wbazie. Przekształcenia liniowe. Wartości własne i wektory własne, wielomian charaktery-styczny. Diagonalizacja macierzy. Przykłady zastosowań algebry.
LITERATURA
1. K.Lisiecki - Elementy algebry i geometrii analitycznej, wyd. SCIRE, Łódź, 2012
2. T. Jurlewicz, Z. Skoczylas - Algebra liniowa 1. Definicje, twierdzenia, wzory. Wyd.GiS, Wrocław, 2002
3. T. Jurlewicz, Z. Skoczylas - Algebra liniowa 1. Przykłady i zadania. Wyd. GiS, Wro-cław, 2002
4. J. Klukowski, I. Nabiałek - Algebra dla studentów, Wydawnictwo Naukowo-Techniczne,Warszawa, 1999
5. http://wazniak.mimuw.edu.pl
6. K.F. Riley, M.P. Hobson, S.J. Bence - Mathematical methods for physics and engi-neering, Cambridge University Press, 2003
1

STRUKTURY ALGEBRAICZNEDefinicja 1. Niech A i B będą dowolnymi zbiorami.Zbiór A × B = {(a, b) : a ∈ A ∧ b ∈ B} wszystkich par uporządkowanych (a, b) takich, żea ∈ A i b ∈ B nazywamy iloczynem kartezjańskim zbiorów A i B.Definicja 2. Działaniem jednoargumentowym w niepustym zbiorze A nazywamy przypo-rządkowanie każdemu elementowi a ∈ A pewnego elementu b ∈ A , inaczej
A 3 a 7→ b ∈ A
.Uwaga 1. W szczególności, gdy każdemu elementowi a ∈ A przyporządkowujemy ten samelement a, to także działanie jednoelementowe nazywamy działaniem identycznościowymlub tożsamościowym.Definicja 3. Działaniem dwuargumentowym wewnętrznym w niepustym zbiorze A nazy-wamy odwzorowanie iloczynu kartezjańskiego A×A w zbiór A.
O zbiorze, w którym określone jest działanie dwuargumentowe wewnętrzne mówimy, że jestzamknięty ze względu na to działanie. Działanie dwuargumentowe oznaczamy zwykle ”◦”,”∗ ”, ”• łub ”+”.Wówczas zamiast (a, b) 7→ c piszemy a ◦ b , a ∗ b , a • b lub ”a+ b.Zbiór A z określonym w nim działaniem wewnętrznym ” ◦ ” oznaczamy (A, ◦).Definicja 4. Działanie dwuargumentowe wewnętrzne ” ◦ ” w zbiorze A nazywamy
1. przemiennym, gdy ∧a,b∈A
a ◦ b = b ◦ a,
2. łącznym, gdy ∧a,b,c∈A
a ◦ (b ◦ c) = (a ◦ b) ◦ c.
Definicja 5. Niech (A, ◦) będzie zbiorem z określonym w nim dwuargumentowym działa-niem wewnętrznym. Element e ∈ A nazywamy elementem neutralnym względem działania”◦ ”, gdy ∧
a∈Aa ◦ e = e ◦ a = a.
Twierdzenie 1. Jeśli w zbiorze A określone jest działanie ”◦ ”i istnieje element neutralnytego działania, to jest on dokładnie jeden.Definicja 6. Załóżmy teraz, że w zbiorze A określone jest działanie ”◦”posiadające ele-ment neutralny e oraz niech a ∈ A . Element b ∈ A nazywamy elementem odwrotnym(przeciwnym, symetrycznym) do elementu a, gdy
a ◦ b = b ◦ a = e
Element odwrotny do elementu a oznaczamy zwykle a−1 lub −a.
2

Twierdzenie 2. Dla dowolnego elementu a ∈ A, jeżeli istnieje element odwrotny, to jeston dokładnie jeden.Definicja 7. Niech K i A będą dowolnymi niepustymi zbiorami. Lewostronnym (prawo-stronnym) działaniem dwuargumentowym zewnętrznym (działaniem zbioru K na zbiór A)nazywamy przyporządkowanie każdemu elementowi iloczynu kartezjańskiego K×A dokład-nie jednego elementu ze zbioru A.Definicja 8. Grupą nazywamy parę (A, ◦) złożoną z niepustego zbioru A i określonego wnim działania wewnętrznego ”◦ ”, które spełnia warunki:
1. ∧a,b,c∈A
a◦, (b ◦ c) = (a ◦ b) ◦ c (łączność działania),
2. ∨e∈A
∧a∈A
a ◦ e = e ◦ a = a (istnienie elementu neutralnego),
3. ∧a∈A
∨a−1∈A
a ◦ a−1 = a−1 ◦ a = e (istnienie elementu odwrotnego).
Jeżeli dodatkowo działanie ′′◦′′ jest przemienne, to grupę nazywamy przemiennąlub abelową.Definicja 9. Pierścieniem nazywamy trójkę (A,+, ◦) , w której
1. para (A,+) jest grupą przemienną (abelową),
2. działanie ”◦”jest łączne,
3. działanie ”◦”jest rozdzielne względem działania ”+”.
Gdy dodatkowo działanie ”◦”jest przemienne, to pierścień nazywamy pierścieniem prze-miennym.Jeżeli istnieje element neutralny mnożenia ”◦” , to oznaczać będziemy go przez 1, a pier-ścień taki nazywać będziemy pierścieniem z jednością.
Definicja Ciałem nazywamy strukturę algebraiczną (A,+, ◦) , w której
1. (A,+) jest grupą przemienną (abelową),
2. (A \ {0}, ◦) jest grupą przemienną (abelową),
3. działanie ”◦”(mnożenie) jest rozdzielne względem działania ”+”(dodawania).Uwaga 2. Wprost z definicji wynika, że ciało zawiera co najmniej dwa elementy; są toelementy neutralne obu działań.
3

Przykład 1. Rozważmy zbiór C = (a, b) : a ∈ R ∧ b ∈ R . W zbiorze C wprowadzamy dzia-łania dodawania i mnożenia w nastepujący sposób:∧
(a,b)∈C
∧(c,d)∈C
(a, b) + (c, d) = (a+ c, b+ d),
∧(a,b)∈C
∧(c,d)∈C
(a, b) · (c, d) = (ac− bd, ad+ bc).
Można łatwo sprawdzić, że trójka (C,+, ·) jest ciałem.Ciało to nazywamy ciałem liczb zespolonych, a jego elementy liczbami zespolonymi.
Ciało liczb zespolonych jest rozszerzeniem ciała liczb rzeczywistych.
Przekształceniem, które ’wkłada’ zbiór liczb rzeczywistych w zbiór liczb zespolonych jestfunkcja
φ : R→ C
określona dla x ∈ wzoremφ(x) = (x, 0).
W ciele liczb zespolonych wyróżniamy parę (0, 1) oznaczając ja literą i. Wobec utożsamienialiczby x z parą (x, 0), parę (x, y) możemy zapisać w postaci
(x, y) = (x, 0) + (0, y) = x+ (0, 1)y = x+ iy.
Postać z = x+ iy nazywamy postacią kanoniczną liczby zespolonej z.
Liczbę rzeczywistą x nazywamy częścią rzeczywistą liczby zespolonej z, zaś liczbę rzeczy-wistą y nazywamy częścią urojoną liczby zespolonej z.
Liczbę zespoloną z = x− iy nazywamy liczbą sprzężoną z liczbą z = x+ iy.Twierdzenie 3. (zasadnicze twierdzenie algebry (d’Alembert/Gauss))Każdy wielomian stopnia dodatniego ma w ciele liczb zespolonych co najmniej jeden pier-wiastek.Wniosek 1. Każdy wielomian stopnia n ma w ciele liczb zespolonych dokładnie n pier-wiastków.Wniosek 2. Jeżeli liczba zespolona z = x+ iy jest pierwiastkiem wielomianu o współczyn-nikach rzeczywistych
anxn + an−1x
n−1 + · · ·+ a1x+ a0
to liczba z nią sprzężona z = x− iy też jest pierwiastkiem tego wielomianu.Definicja 10. Przestrzenią liniową (wektorową) nad ciałem (K,+, ◦) nazywamy grupęprzemienną (V,⊕) z działaniem zewnętrznym ∗ : K × V → V ciała K na grupę V spełnia-jącym warunki:
4

1.∧a∈K
∧v,w∈V
a ∗ (v ⊕ w) = a ∗ v ⊕ a ∗ w
2.∧a,b∈K
∧v∈V
(a+ b) ∗ v = a ∗ v ⊕ b ∗ v
3.∧a,b∈K
∧v∈V
(a · b) ∗ v = a ∗ (b ∗ v)
4.∧v,w∈V
1 ∗ v = v, gdzie 1 oznacza element jednostkowy ciała K.
5

MACIERZE I WYZNACZNIKIDefinicja 11. Rzeczywistą (zespoloną) macierzą prostokątną o m wierszach i n kolum-nach nazywamy funkcję o wartościach rzeczywistych (zespolonych) określoną na iloczyniekartezjańskim {1, 2, . . . ,m} × {1, 2, . . . , n}.
Macierze oznaczamy dużymi, pogrubionymi literami alfabetu i zapisujemy w postaci tablicyprostokątnej
A =
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...am1 am2 · · · amn
O takiej macierzy mówimy, że ma wymiar m × n . Symbol aij oznacza element macierzy(liczbę), który znajduje się w i-tym wierszu i j-tej kolumnie.Często macierze zapisujemy w postaci skróconej A = [aij ]i¬m,j¬n.Gdy m = n, macierz nazywamy macierzą kwadratową stopnia n.Definicja 12. Elementy aii macierzy [aij ]i,i¬n tworzą główną przekątną macierzy zwanąteż diagonalą, a same nazywane są elementami diagonalnymi.Definicja 13. Macierzą zerową nazywamy macierz 0 ∈ M(m,n)(C), której wszystkie ele-menty są zerami.Uwaga 3. Wymiar macierzy zerowej zwykle wynika z kontekstuDefinicja 14. Macierzą diagonalną nazywamy macierz kwadratową spełniającą warunek:
aij = 0, gdyi 6= j.
Oznaczenia:M(m,n)(R)- zbiór macierzy rzeczywistych o m wierszach i n kolumnach,M(m,n)(C)- zbiór macierzy zespolonych o m wierszach i n kolumnach,Mn(R) zbiór macierzy rzeczywistych stopnia n,Mn(C) zbiór macierzy zespolonych stopnia n.Definicja 15. Niech A ∈M(m,n)(C). Macierzą transponowaną do macierzy A = [aij ]i¬m,j¬nnazywamy macierz
AT = [aji]j¬n,i¬n
Definicja 16. Macierzą diagonalną nazywamy macierz kwadratową spełniającą warunek:
aij = 0, gdyi 6= j
Definicja 17. Macierzą jednostkową (identycznościową) stopnia n nazywamy macierz dia-
6

gonalną, której wszystkie elementy na przekątnej są równe 1:
1n = diag(1, 1, . . . , 1) =
1 0 · · · 00 1 · · · 0...
.... . .
...0 0 · · · 1
Uwaga 4. Macierz jednostkową oznaczamy 1n. Kiedy 1 pojawia się bez indeksu, stopieńmacierzy wynika z kontekstu. Często używa się też oznaczeń In oraz I.Definicja 18. Macierzą symetryczną nazywamy macierz kwadratową A, która spełnia wa-runek A = AT , tzn., gdy ∧
i,j∈1,...,n
aij = aji.
Definicja 19. Sumą macierzy A = [aij ]i¬m,j¬n oraz B = [bij ]i¬m,j¬n nazywamy macierz
A+B = [aij + bi,j ]i¬m,j¬n
Definicja 20. Iloczynem macierzy A = [aij ]i¬m,j¬n przez liczbę (rzeczywista lub zespoloną)k nazywamy macierz
k ·A = [k · aij ]i¬m,j¬nTwierdzenie 4. Zbiór M(m,n)(R) wraz z działaniami dodawania macierzy i mnożeniamacierzy przez liczby rzeczywiste jest przestrzenią liniową nad ciałem liczb rzeczywistych.Definicja 21. Iloczynem A · B macierzy A = [aij ]i¬m,j¬p przez macierz B = [bij ]i¬p,j¬nnazywamy macierz C = [cij ]i¬m,j¬n której elementy określone są wzorami:
cij =p∑k=1
aik · bkj i = 1, . . . ,m, j = 1, . . . , n.
Uwaga 5. Aby pomnożyć dwie macierze liczba kolumn pierwszej z nich musi być równaliczbie wierszy drugiej macierzy!Twierdzenie 5. Dla dowolnych macierzy zespolonych (rzeczywistych) A,B,C oraz stałychα, β ∈ C (lub R), prawdziwe są równości (zakładamy, że wymiary macierzy pozwalają nawykonanie wskazanych działań):
1. A+B = B +A,
2. (A+B) + C = A+ (B + C),
3. α · (A+B) = α ·A+ α ·B,
4. (α+ β) ·A = α ·A+ β ·A,
5. α · (β ·A) = (αβ) ·A = β · (α ·A),
7

6. 1 ·A = A · 1 = A,
7. α · (A ·B) = (α ·A) ·B = A · (α ·B) = (A ·B) · α,
8. (A ·B) · C = A · (B · C),
9. (A+B) · C = A · C +B · C,
10. C · (A+B) = C ·A+ C ·B,
11. A ·B 6= B ·A
12. (AT )T = A,
13. (A ·B)T = BT ·AT ,Definicja 22. Niech A = [aij ]i,j¬n będzie macierzą rzeczywistą (zespoloną) stopnia n.Wyznacznikiem macierzy A nazywamy liczbę detA określoną następująco:
1. detA = a11, gdy n = 1
2. detA =∑nk=1(−1)1+k · a1k ·A1k, gdy n > 1,
gdzie A1k jest wyznacznikiem macierzy stopnia (n− 1) powstałej z macierzy A przez usu-nięcie pierwszego wiersza oraz k-tej kolumny.
Liczbę A∗ij = (−1)i+j · Aij nazywamy dopełnieniem algebraicznym elementu aij ma-cierzy A.Wyznacznik macierzy stopnia n nazywamy wyznacznikiem stopnia n.Definicja 23. Macierzą dopełnień algebraicznych macierzy A ∈M(n,n)(C) nazywamy
macierz[A∗ij
]i,j¬n
której elementami są dopełnienia algebraiczne elementów macierzy A.
Twierdzenie 6. (Laplace)Wartość wyznacznika macierzy kwadratowej jest równa sumie iloczynów kolejnych elemen-tów dowolnego wiersza (lub dowolnej kolumny) przez odpowiadające im dopełnienia alge-braiczne.Twierdzenie 7. Jeżeli A i B są macierzami kwadratowymi stopnia n, to
1. det(AT)
= detA,
2. det(A ·B) = det(B ·A) = detA · detB.Twierdzenie 8. Wartość wyznacznika jest równa zero, gdy
1. wszystkie elementy dowolnego wiersza (lub dowolnej kolumny) są równe zero lub
2. dwa wiersze (lub dwie kolumny) są identyczne lub
3. wszystkie elementy pewnego wiersz (lub pewnej kolumny) są proporcjonalne do odpo-wiednich elementów innego wiersza (kolumny) lub
8

4. dowolny wiersz (lub dowolna kolumna) jest kombinacją liniową pozostałych wierszy(kolumn).
Twierdzenie 9. Wyznacznik macierzy trójkątnej dolnej (górnej) jest równy iloczynowielementów diagonalnych tej macierzy (elementów leżących na głównej przekątnej).Twierdzenie 10. Wartość wyznacznika nie zmieni się, gdy do elementów pewnego wiersza(lub pewnej kolumny) dodamy odpowiednie elementy innego wiersz (kolumny) pomnożoneprzez tę sama liczbę.Twierdzenie 11. Pomnożenie wyznacznika przez dowolną liczbę jest równoważne pomno-żeniu przez tę liczbę dowolnego wiersza (lub dowolnej kolumny) tego wyznacznika.Definicja 24. Niech A,B ∈Mn(C). Macierz B nazywamy macierzą odwrotną do macierzyA (odwrotną względem macierzy A), gdy
A ·B = B ·A = 1n
Uwaga 6. Jeżeli macierz B istnieje, to jest wyznaczona jednoznacznie.Definicja 25. Macierzą nieosobliwą nazywamy macierz kwadratową, której wyznacznikjest rożny od zera.Definicja 26. Macierzą osobliwą nazywamy macierz kwadratową, której wyznacznik jestrówny zero.Twierdzenie 12. Macierz kwadratowa A ∈Mn(C) posiada macierz odwrotną wtedy i tylkowtedy, gdy jest nieosobliwa.Twierdzenie 13. Jeżeli macierz kwadratowa A ∈ Mn(C) jest nieosobliwa, to macierzodwrotna A−1 ∈Mn(C) jest postaci
A−1 =1
detA·AD
gdzie AD jest macierzą dołączoną macierzy A, czyli transponowaną macierzą dopełnieńelementów macierzy A.
Rozważmy równania
A ·X = B
A ·X = B |A−1·A−1 ·A ·X = A−1 ·B
1 ·X = A−1 ·BX = A−1 ·B
X ·A = B
X ·A = B | ·A−1
X ·A ·A−1 = B ·A−1
X · 1 = B ·A−1
X = B ·A−1
9

UKŁADY RÓWNAŃDefinicja 27. Układem m równań liniowych o n niewiadomych nazywamy układ równańpostaci
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2...
......
......
am1x1 + am2x2 + · · ·+ amnxn = bm
(1)
Z układem równań (1) związane są cztery ważne macierze:
macierz współczynników przy niewiadomych
A =
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...am1 am2 · · · amn
,
macierz niewiadomych
X =
x1
x2...xn
,
macierz wyrazów wolnych
B =
b1b2...bm
oraz macierz uzupełniona
U =
a11 a12 · · · a1n b1a21 a22 · · · a2n b2...
.... . .
......
am1 am2 · · · amn bm
,
która powstaje przez dopisanie do macierzy współczynników kolumny macierzy wyrazówwolnych.Uwaga 7. Układ równań (1) można równoważnie zapisać w postaci równania macierzo-wego
A ·X = B.
10

Definicja 28. Układ równań (1), w którym macierz B złożona jest z samych zer nazywamyjednorodnym.Twierdzenie 14. (Cramera)Układ n równań liniowych z n niewiadomymi
a11x1 + a12x2 + · · · a1nxn = b1a21x1 + a22x2 + · · · a2nxn = b2...
......
......
an1x1 + an2x2 + · · · annxn = bn
(2)
ma dokładnie jedno rozwiązanie wtedy i tylko wtedy, gdy macierz współczynników przyniewiadomych jest nieosobliwa.Rozwiązanie to wyraża się wzorami Cramera
xi =AidetA
i = 1, 2, . . . , n (3)
gdzie Ai jest wyznacznikiem macierzy powstałej z macierzy A przez zastąpienie i-tej ko-lumny kolumną wyrazów wolnych (macierzą kolumnową B).Wniosek 3. Jednorodny układ n równań liniowych z n niewiadomymi o nieosobliwej ma-cierzy współczynników przy niewiadomych ma dokładnie jedno rozwiązanie. Jest to rozwią-zanie zerowe.Definicja 29. Minorem stopnia k macierzy A ∈Mm,n(C), k ¬ min{m,n} nazywamywyznacznik dowolnej macierzy kwadratowej stopnia k powstałej przez usunięciez macierzy A (m− k) wierszy i (n− k) kolumnDefinicja 30. Niech A ∈ M(m,n)(C). Rzędem macierzy A nazywamy liczbę r, gdy wmacierzy tej istnieje niezerowy minor stopnia r i jednocześnie nie istnieje w tej macierzyniezerowy minor stopnia wyższego niż r. Rząd macierzy oznaczamy r(A).Uwaga 8. Wprost z definicji wynika, że jeśli macierz A ∈ M(m,n)(C) (macierz ma mwierszy oraz n kolumn), to
0 ¬ r(A) ¬ min{m,n}.
Twierdzenie 15. Jeżeli r(A) = r, to r(AT ) = r.Twierdzenie 16. Rząd macierzy nie zmieni się jeżeli:
1. usuniemy wiersz lub kolumnę złożoną z samych zer,
2. usuniemy jeden z dwóch identycznych lub proporcjonalnych wierszy,
3. usuniemy jedną z dwóch identycznych lub proporcjonalnych kolumn,
4. dodamy do elementów pewnego wiersza (lub kolumny) odpowiednie elementy innegowiersza (lub kolumny) pomnożone przez tę samą liczbę,
5. pomnożymy (lub podzielimy) elementy dowolnego wiersza (lub kolumny) przez dowolnąliczbę różną od zera
11

Twierdzenie 17. (Kronecker-Capella) Układ równań zawierający m równań oraz n nie-wiadomych ma rozwiązanie wtedy i tylko wtedy, gdy rząd macierzy współczynników przyniewiadomych jest równy rzędowi macierzy uzupełnionej.Rozwiązanie to jest zależne od liczby parametrów równej różnicy pomiędzy liczbą niewiado-mych a wspólnym rzędem macierzy.W przypadku, gdy wspomniane rzędy są różne układ jest sprzeczny.
Procedura wyznaczania rozwiązania (rozwiązań) w przypadku, gdy istnieje jest następu-jąca:
1. ustalamy wspólny rząd r macierzy współczynników A i macierzy uzupełnionej U ,
2. w macierzy A znajdujemy różny od zera minor stopnia r,
3. odrzucamy równania nie objęte tym minorem (jeśli minor obejmuje wszystkie rów-nania, to oczywiście żadnego nie odrzucamy),
4. nieobjęte tym minorem niewiadome traktujemy jako parametry (jeśli minorem objętesą wszystkie parametry, to układ ma dokładnie jedno rozwiązanie),
5. uzyskany w ten sposób układ równań rozwiązujemy dowolną metodą (np. stosującwzory Cramera).
12

GEOMETRIA ANALITYCZNA W PRZESTRZENI R3.Definicja 31. Wektorem nazywać będziemy uporządkowany odcinek (P,Q) o początku wpunkcie P i końcu w punkcie Q. Wektor (P,Q) oznaczać będziemy symbolem
−−→PQ lub, jeśli
nie jest dla nas istotne wyróżnienie początku i końca wektora, symbolami −→u ,−→v ,−→w , ... .Definicja 32. Wektorem przeciwnym do wektora
−−→PQ nazywamy wektor
−−→QP , w którym
punkty są uporządkowane przeciwnie. Mówimy wówczas, że wektor−−→QP ma zwrot przeciwny
do wektora−−→PQ.
Jeżeli początek i koniec wektora pokrywają się, to wyznaczają wektor zerowy. Będziemyoznaczali go symbolem
−→0 .
Definicja 33. Długością wektora−−→PQ nazywać będziemy długość odcinka PQ i oznaczać
będziemy |−−→PQ|. W szczególności, |−→0 | = 0.
Definicja 34. Dwa wektory mają ten sam kierunek, gdy są równoległe.Definicja 35. Dwa wektory nazywać będziemy równymi, jeżeli mają tę samą długość orazten sam kierunek i zwrot.Definicja 36. Sumą wektorów −→u oraz −→v nazywamy wektor −→u + −→v , którego początkiemjest początek wektora −→u , zaś końcem – koniec wektora −→v .Twierdzenie 18. Dodawanie wektorów jest przemienne i łączne, tzn. dla dowolnych wek-torów −→u ,−→v oraz −→w zachodzą równości
~u+ ~v = ~v + ~u,
(~u+ ~v) + ~w = ~u+ (~v + ~w).
Dla dowolnego wektora −→v prawdziwa jest też równość
−→v +−→0 = −→v .
Definicja 37. Iloczynem niezerowego wektora −→u przez liczbę rzeczywistą k nazywamy wek-tor k−→u określony następująco:1. gdy k > 0, to wektor k−→u ma ten sam zwrot i kierunek co wektor −→u ,a jego długość |k−→u | = k|−→u |,2. gdy k < 0, to wektor k−→u ma kierunek wektora −→u , zwrot do niego przeciwny, a długość|k−→u | = |k| · |−→u |,3. gdy k = 0, to wektor k−→u jest wektorem zerowym.Gdy −→u =
−→0 , to dla dowolnego k ∈ R przyjmujemy k−→u =
−→0 .
Wniosek 4. Mnożenie wektora przez liczbę jest rozdzielne względem dodawania wektorów
k(~u+ ~v) = k~u+ k~v.
Twierdzenie 19. Dwa niezerowe wektory −→u i −→v są równoległe wtedy i tylko wtedy, gdyistnieje liczba rzeczywista k 6= 0 taka, że
−→u = k−→v
13

Definicja 38. Różnicą wektorów ~u i ~v nazywamy wektor
~u− ~v = ~u+ (−1)~v.
Definicja 39. Zespół złożony z punktu O, uporządkowanej trójki osi (Ox,Oy,Oz) orazwersorów
−→i ,−→j ,−→k nazywamy kartezjańskim układem współrzędnych w przestrzeni trój-
wymiarowej.
Taki układ współrzędnych nazywamy układem prawoskrętnym (lub układem o orientacjidodatniej). Mówiąc bardziej obrazowo, układ prawoskrętny możemy wyobrazić sobie na-stępująco:jeśli osią pewnej śruby z tzw. „prawym gwintem” (obracając w prawo wkręcamy śrubę) jestoś Oz i obracamy tę śrubę od osi Ox do osi Oy, to przesuwa się ona zgodnie z dodatnimzwrotem osi Oz.
Równoważnie można zdefiniować układ lewoskrętny jako zespół złożony z punktu O, upo-rządkowanej trójki osi (Oy,Ox,Oz) oraz wersorów
−→j ,−→i ,−→k .
Trzy wzajemnie prostopadłe płaszczyzny dzielą trójwymiarową przestrzeń na osiem częścizwanych oktantami (podobnie jak dwie prostopadłe proste dzielą płaszczyznę na czteryćwiartki). W prawoskrętnym układzie współrzędnych oktanty numerujemy rzymskimi licz-bami od I do VIII jak na poniższym rysunku.
W tabeli, przedstawiono znaki współrzędnych x, y, z punktu P (x, y, z) w zależności odoktantu, w którym punkt jest położony.
Dla dowolnych dwóch punktów P1(x1, y1, z1) oraz P2(x2, y2, z2) definiujemy ich odległość|P1P2| wzorem
|P1P2| =√
(x2 − x1)2 + (y2 − y1)2 + (z2 − z1)2.
Definicja 40. Wektorem zaczepionym w punkcie P1 (początku wektora)o końcu w punkcie P2 nazywamy uporządkowaną parę punktów (P1, P2).Wektor (P1, P2) oznaczać będziemy
−−−→P1P2.
14

oktant znak x znak y znak zI + + +II - + +III - - +IV + - +V + + -VI - + -VII - - -VII + - -
Tablica 1: Znaki współrzędnych w poszczególnych oktantach.
Definicja 41. Długością wektora−−−→P1P2 nazywać będziemy odległość punktów P1 i P2.
Zatem|−−−→P1P2| = |P1P2|.
Każdy wektor ~v przestrzeni R3 zaczepiony w punkcie (0, 0, 0) można przedstawić w postacitzw. kombinacji liniowej wersorów osi (czyli sumy wersorów pomnożonych przez pewneliczby rzeczywiste), to znaczy
~v = a~i+ b~j + c~k.
Liczby a, b, c nazywamy współrzędnymi wektora ~v. Oczywiście liczby te są współrzędnymipunktu, który jest końcem wektora ~v.Uwaga 9. Wersory osi możemy zapisać następująco:
~i = 1 ·~i+ 0 ·~j + 0 · ~k,~j = 0 ·~i+ 1 ·~j + 0 · ~k,~k = 0 ·~i+ 0 ·~j + 1 · ~k.
Dla dowolnych punktów P1(x1, y1, z1) oraz P2(x2, y2, z2) wektor−−−→P1P2 można przedstawić
w postaci
−−−→P1P2 = (x2 − x1)~i+ (y2 − y1)~j + (z2 − z1)~k =
= [x2 − x1, y2 − y1, z2 − z1] .
Liczby (x2 − x1), (y2 − y1), (z2 − z1) nazywamy współrzędnymi wektora−−−→P1P2. W tym
zapisie wersory osi mają następującą postać
~i = [1, 0, 0] , ~j = [0, 1, 0] , ~k = [0, 0, 1] .
15

Definicja 42. Iloczynem skalarnym dwóch niezerowych wektorów −→u ,−→v ∈ R3 nazywamyliczbę −→u · −→v będącą iloczynem długości obu wektorów i cosinusa zawartego pomiędzy nimikąta,
−→u · −→v = |−→u | |−→v | · cos∠(−→u ,−→v ).
Jeśli któryś z wektorów jest wektorem zerowym przyjmujemy, że ich iloczyn skalarny jestrówny zero.
−→u · −→v = −→v · −→u .
Twierdzenie 20. Dla dowolnych wektorów −→u ,−→v ,−→w ∈ R3 oraz liczby k ∈ R zachodząnastępujące równości
−→u · (−→v +−→w ) = −→u · −→v +−→u · −→w ,
k · (−→u · −→v ) = (k−→u ) · −→v = −→u · (k−→v ).
Twierdzenie 21. Dla wersorów−→i ,−→j ,−→k osi Ox,Oy,Oz układu współrzędnych, zachodzą
równości −→i · −→i =
−→j · −→j =
−→k ·−→k = 1,
−→i · −→j =
−→i ·−→k =
−→j ·−→k = 0.
Twierdzenie 22. Jeżeli −→u = [ux, uy, uz] oraz −→v = [vx, vy, vz], to −→u · −→v = uxvx+ uyvy +uzvz .Wniosek 5. Dla dowolnego wektora ~u zachodzi równość |~u| =
√~u · ~u
cos∠(~u,~v) =~u · ~v|~u| · |~v|
,
więc
∠(−→u ,−→v ) = arccos−→u · −→v|−→u | · |−→v |
.
Wniosek 6. Dwa niezerowe wektory są prostopadłe wtedy i tylko wtedy, gdy ich iloczynskalarny jest równy zero.Definicja 43. Iloczynem wektorowym dwóch niezerowych i nierównoległych wektorów ~u i~v nazywamy wektor oznaczany ~u× ~v określony następująco:1. |~u× ~v| = |~u| · |~v| · sin∠(~u,~v),2. wektor ~u× ~v jest prostopadły do wektora ~u i do wektora ~v,3. zwrot wektora ~u×~v jest taki, aby trójka (~u,~v, ~u×~v) miała orientację zgodną z orientacjąukładu współrzędnych.Gdy wektory ~u i ~v są równoległe lub choć jeden z nich jest wektorem zerowym, przyjmujemy,że ich iloczyn wektorowy jest wektorem zerowym.
16

−→i ×−→i =
−→0 ,
−→i ×−→j =
−→k ,
−→i ×−→k = −−→j ,
−→j ×−→i = −
−→k ,
−→j ×−→j =
−→0 ,
−→j ×−→k =
−→i ,
−→k ×−→i =
−→j ,
−→k ×−→j = −−→i ,
−→k ×−→k =
−→0 .
Twierdzenie 23. Dla dowolnych wektorów ~u,~v, ~w oraz dowolnego k ∈ Rprawdziwe są równości:
~v × ~u = −(~u× ~v),
~u× (~v + ~w) = ~u× ~v + ~u× ~w,
k(~u× ~v) = (k~u)× ~v = ~u× (k~v).
Ponadto, dla niezerowych wektorów ~v1 oraz ~v2 równość ~v1 × ~v2 = ~0 zachodzi wtedy i tylkowtedy, gdy wektory ~v1 i ~v2 są równoległe.Twierdzenie 24. Dla dowolnych wektorów −→u = [ux, uy, uz] oraz −→v = [vx, vy, vz] ichiloczyn wektorowy można obliczyć korzystając z symbolu wyznacznika (choć formalnie, wy-znacznik jest liczbą, a nie wektorem, zapis ten jednak ułatwia obliczenia)
−→u ×−→v =
∣∣∣∣∣∣∣−→i−→j−→k
ux uy uzvx vy vz
∣∣∣∣∣∣∣ .
Twierdzenie 25. Pole równoległoboku wyznaczonego przez dwa nierównoległe wektory jestliczbowo równe długości iloczynu wektorowego tych wektorów
|P | = |−→u ×−→v |.
Wniosek 7. Pole trójkata o wierzchołkach w punktach A,B,C nieleżących na jednej pro-stej jest równe
P∆ABC =12· |−−→AB ×
−→AC|.
Definicja 44. Iloczynem mieszanym wektorów −→u ,−→v oraz −→w nazywamy liczbę
(−→u ×−→v ) · −→w .
17

Twierdzenie 26. Jeżeli~u = [ux, uy, uz], ~v = [vx, vy, vz], ~w = [wx, wy, wz] ∈ R3, to
(~u× ~v) · ~w =
∣∣∣∣∣∣∣ux uy uzvx vy vzwx wy wz
∣∣∣∣∣∣∣ .Ponadto,
(~u× ~v) · ~w = (~w × ~u) · ~v = (~v × ~w) · ~u.
Twierdzenie 27. Iloczyn mieszany trzech niezerowych wektorów o wspólnym początku jestrówny zero wtedy i tylko wtedy, gdy leżą w jednej płaszczyźnie.Definicja 45. Trzy niezerowe wektory nazywamy komplanarnymi (współpłaszczyznowymi),gdy ich iloczyn mieszany jest równy zero.Twierdzenie 28. Objętość równoległościanu wyznaczonego przez trzy niekomplanarne inierównoległe wektory jest równa wartości bezwzględnej iloczynu mieszanego tych wektorów,a objętość czworościanu wyznaczonego przez te wektory jest równa jednej szóstej objętościwyznaczonego przez nie równoległościanu.
18

Płaszczyzna w przestrzeni R3
Załóżmy, że dana jest płaszczyzna π, pewien punkt P0(x0, y0, z0) leżący w tej płaszczyź-nie oraz wektor ~v = [A,B,C] 6= ~0 do tej płaszczyzny prostopadły. Równanie opisującepłaszczyznę π ma postać
A(x− x0) +B(y − y0) + C(z − z0) = 0.
Równanie ogólne płaszczyzny ma postać
Ax+By + Cz +D = 0.
Równanie płaszczyzny w postaci odcinkowej
x
p+y
q+z
r= 1.
równaniem wektorowymWeźmy pod uwagę dwa nierównoległe wektory ~u = [ux, uy, uz] oraz ~v = [vx, vy, vz] o wspól-nym początku w punkcie P0(x0, y0, z0).Niech P (x, y, z) będzie dowolnym punktem płaszczyzny różnym od punktu P0. Punkt Pnależy do płaszczyzny π wtedy i tylko wtedy, gdy wektor
−−→P0P leży w tej płaszczyźnie.
A tak jest wtedy i tylko wtedy, gdy wektory ~u, ~v oraz−−→P0P leżą w tej samej płaszczyźnie.
Oznacza to, że muszą istnieć takie liczby rzeczywiste α i β, że
−−→P0P = α~u+ β~v.
19

Otrzymane równanie nazywamy równaniem wektorowym płaszczyzny.Wykorzystując fakt, że dwa wektory są równe wtedy i tylko wtedy, gdy mają równe odpo-wiednie współrzędne, możemy przekształcić otrzymane równanie wektorowe
−−→P0P = α~u+β~v
do układu równań skalarnych następująco:
−−→P0P = α~u+ β~v ⇔
⇔ [x− x0, y − y0, z − z0] = α[ux, uy, uz] + β[vx, vy, vz]
⇔ [x− x0, y − y0, z − z0] = [αux + βvx, αuy + βvy, αuz + βvz],
a stąd
−−→P0P = α~u+ β~v ⇔
x = x0 + αux + βvxy = y0 + αuy + βvyz = z0 + αuz + βvz .
Otrzymane równania nazywamy równaniami parametrycznymi płaszczyzny.Twierdzenie 29. Odległość punktu P0(x0, y0, z0) od płaszczyzny π danej równaniem Ax+By + Cz +D = 0 jest równa
d =|Ax0 +By0 + Cz0 +D|√
A2 +B2 + C2.
Wniosek 8. Odległość płaszczyzny danej równaniem Ax+By + Cz +D = 0 od początkuukładu współrzędnych obliczamy ze wzoru
d =|D|√
A2 +B2 + C2.
Wzajemne położenie płaszczyznDwie płaszczyzny mogą być wzajemnie położone na trzy istotnie różne sposoby: być rów-noległe nie pokrywając się, pokrywać się lub przecinać się wzdłuż linii prostej. Załóżmy, żedane są dwie płaszczyzny π1 oraz π2 określone równaniami
π1 : A1x+B1y + C1z +D1 = 0,π2 : A2x+B2y + C2z +D2 = 0.
Zapiszmy te równania w postaci układu równań{A1x+B1y + C1z = −D1
A2x+B2y + C2z = −D2 .
Analitycznie wzajemne położenie dwóch płaszczyzn poznajemy po wzajemnej relacji po-między rzędem macierzy współczynników przy niewiadomych
A =
[A1 B1 C1
A2 B2 C2
],
20
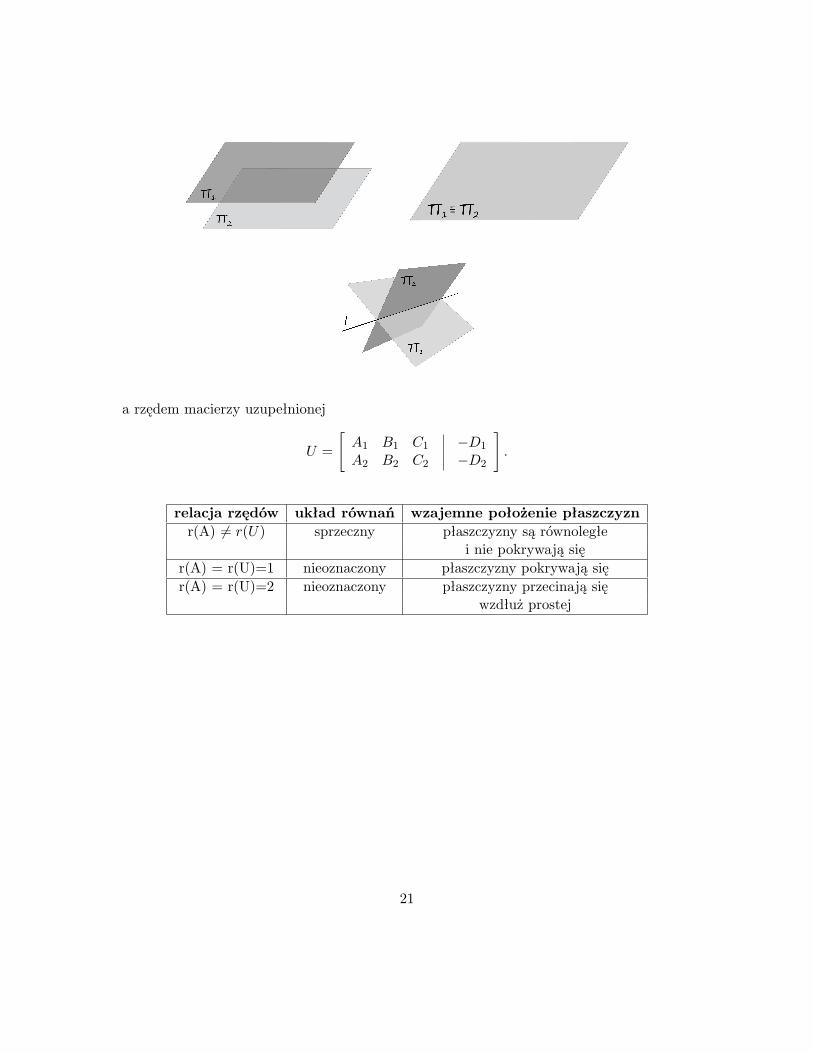
a rzędem macierzy uzupełnionej
U =
[A1 B1 C1 −D1
A2 B2 C2 −D2
].
relacja rzędów układ równań wzajemne położenie płaszczyznr(A) 6= r(U) sprzeczny płaszczyzny są równoległe
i nie pokrywają sięr(A) = r(U)=1 nieoznaczony płaszczyzny pokrywają sięr(A) = r(U)=2 nieoznaczony płaszczyzny przecinają się
wzdłuż prostej
21

Prosta w przestrzeni R3
Rozważmy prostą l w przestrzeni R3. Niech dany będzie punkt P0(x0, y0, z0) leżący na tejprostej i wektor −→v = [a, b, c] równoległy do niej. Weźmy teraz dowolny punkt P (x, y, z) 6=P0(x0, y0, z0). Punkt ten leży na prostej l wtedyi tylko wtedy, gdy wektory
−−→P0P = [x − x0, y − y0, z − z0] oraz −→v = [a, b, c] są równoległe,
czyli gdy istnieje liczba rzeczywista t taka, że
−−→P0P = −→v · t. (4)
Otrzymane równanie nazywamy równaniem wektorowym prostej l, a wektor −→v nazywamywektorem kierunkowym tej prostej.
Równania parametryczneRównanie wektorowe prostej l możemy zapisać w postaci równości
[x− x0, y − y0, z − z0] = [a, b, c] · t, t ∈ R.
Równość tych wektorów zachodzi wówczas, gdy spełniony jest układ równańx− x0 = aty − y0 = btz − z0 = ct.
A ten z kolei, równoważny jest układowix = x0 + aty = y0 + bt t ∈ R.z = z0 + ct,
(5)
Otrzymane równania nazywamy równaniami parametrycznymi prostej l. Zauważmy, żemając dane równania parametryczne prostej, bez trudu odczytujemy z nich współrzednewektora kierunkowego ~v = [a, b, c].
Równania kierunkoweZałóżmy teraz, że współrzędne a, b, c wektora kierunkowego ~v są jednocześnie różne od zera.Wówczas z każdego z równań parametrycznych prostej l możemy wyznaczyć parametr t
t =x− x0
a
t =y − y0
b
t =z − z0
c.
Wobec równości lewych stron, równe są też prawe strony tych równań
22

x− x0
a=y − y0
b=z − z0
c. (6)
Otrzymane równania nazywamy równaniami kierunkowymi prostej l. Z równań tych beztrudu odczytujemy współrzedne wektora kierunkowego ~v = [a, b, c].
Równanie krawędzioweWcześniejsze rozważania o wzajemnym położeniu dwóch płaszczyzn pokazały, że dwie nie-równoległe płaszczyzny mają wspólną prostą (dokładnie jedną).
Rysunek 1: Prosta jako wspólna krawędź dwóch płaszczyzn.
Fakt ten pozwala napisać równania tej prostej w postaci układu równań dwóch płaszczyzn,które przecinając się tworzą prostą.Niech prosta l będzie częścią wspólną płaszczyzn
π1 : A1x+B1y + C1z +D1 = 0 oraz π2 : A2x+B2y + C2z +D2 = 0
przy czymA1
A26= B1
B2lub
A1
A26= C1
C2. Wówczas układ równań
{A1x+B1y + C1z +D1 = 0A2x+B2y + C2z +D2 = 0
(7)
nazywamy równaniami krawędziowymi prostej l.
Pęk płaszczyznKażda prosta jest częścią wspólną nieskończenie wielu nierównoległych płaszczyzn. Tworząone tzw. pęk płaszczyzn (wyobraźcie sobie kartki otwartej książki jako płaszczyzny, którychwspólną krawędzią jest grzbiet książki).Wszystkie płaszczyzny należące do takiego pęku można opisać za pomocą równania para-metrycznego.
23

Rysunek 2: Pęk płaszczyzn.
Jeżeli prosta l dana jest równaniami krawędziowymi
l :
{A1x+B1y + C1z +D1 = 0A2x+B2y + C2z +D2 = 0,
to równanie
λ1 (A1x+B1y + C1z +D1) + λ2 (A2x+B2y + C2z +D2) = 0, (8)
w którym parametry λ1 oraz λ2 nie są jednocześnie równe zeru, opisuje wszystkie płasz-czyzny, których częścią wspólną jest prosta l.Wniosek 9. Znając równanie pęku płaszczyzn zawierających daną prostą bez trudu możemywyznaczyć tę płaszczyznę z pęku, która spełnia jakiś dodatkowy warunek, np. jest równoległa(prostopadła) do innej danej płaszczyzny lub przechodzi przez dany punkt (patrz zadaniarozwiązane).
Wzajemne położenie prostychJak wiemy dwie proste mogą się przecinać, być równoległe i nie pokrywać się, być równole-głe i pokrywać się lub, nie być równoległe i nie mieć punktów wspólnych. W tym ostatnimprzypadku mówimy, że proste są skośne. Symbolicznie możemy te przypadki opisać nastę-pująco:
wzajemne położenie prostych l1 i l2 opis symbolicznyproste przecinają się l1 ∩ l2 = {punkt}
proste są równoległe i nie pokrywają się l1 ‖ l2 ∧ l1 ∩ l2 = ∅proste są równoległe i pokrywają się l1 ≡ l2
proste są skośne l1 6‖ l2
24
Sfera i okrąg w przestrzeni trójwymiarowej
Definicja 46. Sferą o środku w punkcie O(x0, y0, z0) i promieniu o długości R nazywamyzbiór wszystkich punktów przestrzeni, których odległość od punktu O jest równa R.
Wprost z powyższej definicji wynika, że punkt P (x, y, z) należy do sfery o środku w punkcieO(x0, y0, z0) i promieniu o długości R wtedy i tylko wtedy, gdy jego współrzędne spełniająrównanie
(x− x0)2 + (y − y0)2 + (z − z0)2 = R2.
Równanie to nazywamy równaniem sfery o środku w punkcie O(x0, y0, z0) i promieniu odługości R.
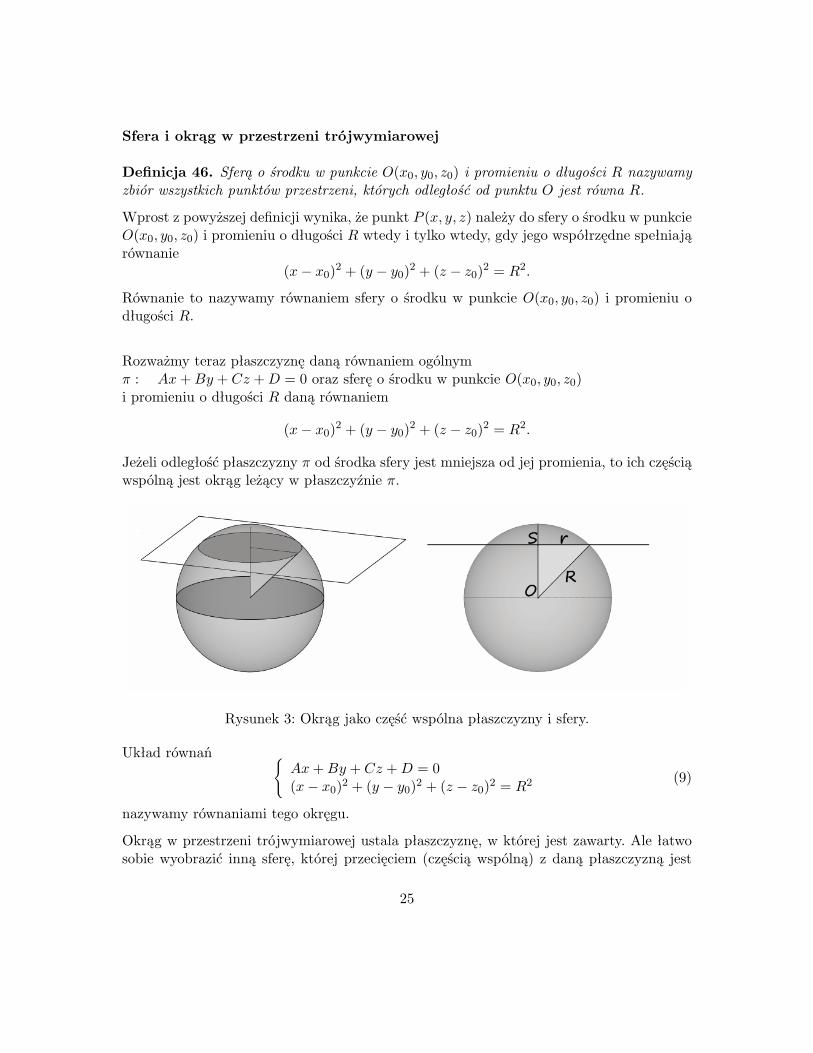
Rozważmy teraz płaszczyznę daną równaniem ogólnymπ : Ax+By + Cz +D = 0 oraz sferę o środku w punkcie O(x0, y0, z0)i promieniu o długości R daną równaniem
(x− x0)2 + (y − y0)2 + (z − z0)2 = R2.
Jeżeli odległość płaszczyzny π od środka sfery jest mniejsza od jej promienia, to ich częściąwspólną jest okrąg leżący w płaszczyźnie π.
Rysunek 3: Okrąg jako część wspólna płaszczyzny i sfery.
Układ równań {Ax+By + Cz +D = 0(x− x0)2 + (y − y0)2 + (z − z0)2 = R2 (9)
nazywamy równaniami tego okręgu.
Okrąg w przestrzeni trójwymiarowej ustala płaszczyznę, w której jest zawarty. Ale łatwosobie wyobrazić inną sferę, której przecięciem (częścią wspólną) z daną płaszczyzną jest
25
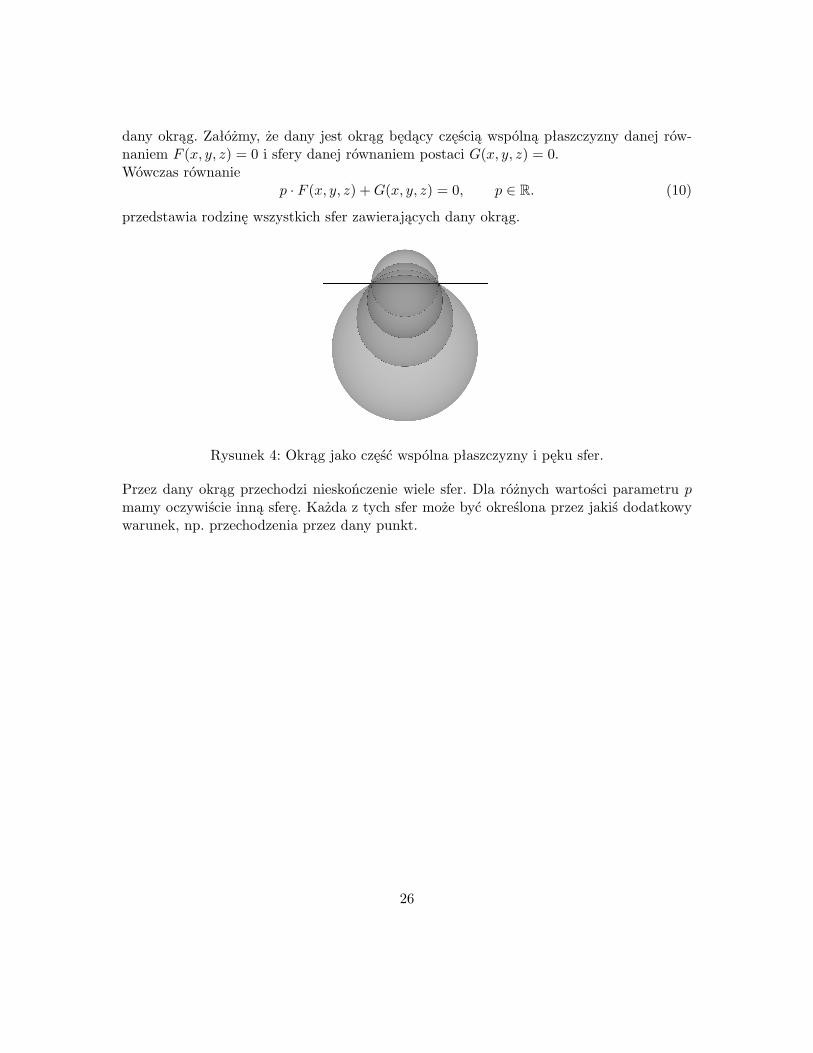
dany okrąg. Załóżmy, że dany jest okrąg będący częścią wspólną płaszczyzny danej rów-naniem F (x, y, z) = 0 i sfery danej równaniem postaci G(x, y, z) = 0.Wówczas równanie
p · F (x, y, z) +G(x, y, z) = 0, p ∈ R. (10)
przedstawia rodzinę wszystkich sfer zawierających dany okrąg.
Rysunek 4: Okrąg jako część wspólna płaszczyzny i pęku sfer.
Przez dany okrąg przechodzi nieskończenie wiele sfer. Dla różnych wartości parametru pmamy oczywiście inną sferę. Każda z tych sfer może być określona przez jakiś dodatkowywarunek, np. przechodzenia przez dany punkt.
26

PRZESTRZENIE LINIOWE I PRZEKSZTAŁCENIA LINIOWEDefinicja 47. Przestrzenią liniową (wektorową) nad ciałem (K,+, ◦) nazywamygrupę przemienną (V,⊕) z działaniem zewnętrznym ∗ : K × V → V ciała K na grupęV spełniającym warunki:
1. ∧a∈K
∧~v,~w∈V
a ∗ (~v ⊕ ~w) = a ∗ ~v ⊕ a ∗ ~w,
2. ∧a,b∈K
∧~v∈V
(a+ b) ∗ ~v = a ∗ ~v ⊕ b ∗ ~v,
3. ∧a,b∈K
∧~v∈V
(a · b) ∗ ~v = a ∗ (b ∗ ~v),
4. ∧~v∈V
1 ∗ ~v = ~v, gdzie 1 oznacza element jednostkowy ciała K.
Przestrzeń liniową zapisujemy jako czwórkę (V,⊕,K, ◦) lub krótko V .Twierdzenie 30. Każde ciało (K,+, ◦) jest przestrzenią liniową (K,+,K, ◦) nad ciałemK.Wniosek 10. (R,+,R, ·) jest przestrzenią liniową nad ciałem R.Twierdzenie 31. Niech (K,+, ◦) będzie ciałem. Wówczas czwórka (Kn,+,K, ◦) z dzia-łaniami określonymi następująco:
• (x1, x2, . . . , xn) + (y1, y2, . . . , yn) = (x1 + y1, x2 + y2, . . . , xn + yn)dla (x1, x2, . . . , xn), (y1, y2, . . . , yn) ∈ Kn,
• α ◦ (x1, x2, . . . , xn) = (α ◦ x1, α ◦ x2, . . . , α ◦ xn) dla (x1, x2, . . . , xn) ∈ Kn, α ∈ K
jest przestrzenią liniową nad ciałem K (Kn = K ×K . . .×K︸ ︷︷ ︸n egzemplarzy
).
Wniosek 11. (Rn,+,R, ·) jest przestrzenią liniową nad ciałem R.Definicja 48. Przestrzeń liniową W nad ciałem K nazywamy podprzestrzenią liniowąprzestrzeni liniowej V nad ciałem K, jeżeli W ⊂ V oraz działania w przestrzeni W sądziałaniami w przestrzeni V ograniczonymi do zbioru W .Twierdzenie 32. Podzbiór W ⊂ V z działaniami z przestrzeni liniowej V ograniczonymido zbioru W jest podprzestrzenią liniową przestrzeni liniowej V nad ciałem K, wtedyi tylko wtedy, gdy dla dowolnych wektorów ~v1, ~v2 ∈W oraz dowolnego a ∈ K
~v1 + ~v2 ∈W oraz a~v1 ∈W.
27

Definicja 49. Niech V będzie przestrzenią liniową nad ciałem K. Niech ~v1, ~v2, . . . , ~vnbędą dowolnymi wektorami przestrzeni liniowej V oraz α1, α2, . . . , αn niech będą dowolnymielementami ciała K. Wektor
~v = α1~v1 + α2~v2 + . . .+ αn~vn
nazywamy kombinacją liniową wektorów ~v1, ~v2, . . . , ~vn o współczynnikach α1, α2, . . . , αn.Definicja 50. Wektory ~v1, ~v2, . . . , ~vn ∈ V nazywamy liniowo niezależnymi, jeżeli kom-binacja liniowa tych wektorów jest wektorem zerowym wtedy i tylko wtedy, gdy wszystkiewspółczynniki tej kombinacji liniowej są równe zeru.w zapisie symbolicznym
~v = α1~v1 + α2~v2 + . . .+ αn~vn = ~0 ⇔ α1 = α2 = . . . = αn = 0.
Definicja 51. Wektory ~v1, ~v2, . . . , ~vn ∈ V nazywamy liniowo zależnymi, jeżeli nie sąliniowo niezależne. Innymi słowy, gdy istnieje taka kombinacja liniowa tych wektorów~v = α1~v1 + α2~v2 + . . . + αn~vn = ~0, której nie wszystkie współczynniki α1, α2, . . . , αn sązerami.Twierdzenie 33. Wektory ~v1, ~v2, . . . , ~vn ∈ V są liniowo zależne wtedy i tylko wtedy, gdyjeden z nich jest kombinacją liniową pozostałych.Definicja 52. Układ wektorów ~v1, ~v2, . . . , ~vn ∈ V przestrzeni liniowej V nazywamy mak-symalnym układem liniowo niezależnym, gdy dodanie dowolnego innego wektora czynigo układem liniowo zależnym.Definicja 53. Niech U będzie dowolnym podzbiorem przestrzeni liniowej V nad ciałemK. Liniowym domknięciem zbioru U nazywamy zbiór Lin U wszystkich kombinacjiliniowych wektorów ze zbioru U .Twierdzenie 34. Dla dowolnego podzbioru U ⊂ V przestrzeni liniowej nad ciałem K jegoliniowe domkniecie jest podprzestrzenią liniową nad ciałem K przestrzeni liniowej V .Twierdzenie 35. Niech V będzie przestrzenią liniową nad ciałem K oraz U1 ⊂ V orazU2 ⊂ V . Wówczas
1. Lin U1 ∪ Lin U2 ⊂ Lin (U1 ∪ U2),
2. Lin (U1 ∩ U2) ⊂ Lin U1 ∩ LinU2
Definicja 54. Układ wektorów {~v1, ~v2, . . . , ~vn} przestrzeni V nazywamy bazą przestrzeniliniowej V nad ciałem K, jeżeli:
1. wektory ~v1, ~v2, . . . , ~vn są liniowo niezależne,
2. Lin {~v1, ~v2, . . . , ~vn} = V .Twierdzenie 36. Dla dowolnego układu wektorów {~v1, ~v2, . . . , ~vn} przestrzeni liniowej Vnad ciałem K następujące warunki są równoważne
1. wektory {~v1, ~v2, . . . , ~vn} tworzą bazę przestrzeni liniowej V ,
28

2. układ wektorów {~v1, ~v2, . . . , ~vn} jest maksymalnym układem liniowo niezależnym,
3. dowolny wektor ~v można jednoznacznie przedstawić w postaci~v = α1~v1 + α2~v2 + . . .+ αn~vn, gdzie α1, α2, . . . , αn ∈ K.
Uwaga 10. Wektor ~v mający w bazie {~v1, ~v2, . . . , ~vn} przedstawienie~v = α1~v1 + α2~v2 + . . .+ αn~vn zapisywać będziemy krócej
~v = [α1, α2, . . . , αn].
Uwaga 11. W różnych bazach ten sam wektor może mieć różne przedstawienie, a zatemróżne współrzędne.Definicja 55. Wymiarem przestrzeni liniowej nazywamy liczbę elementów jej bazy.Twierdzenie 37. (Steinitz’a) Każdy układ m (m < n) liniowo niezależnych wektorów n-wymiarowej przestrzeni liniowej V można uzupełnić do bazy tej przestrzeni. Innymi słowy,jeśli wektory {~v1, ~v2, . . . , ~vm}, m < n, przestrzeni liniowej V są liniowo niezależne, to ist-nieje n−m wektorów {~vm+1, . . . , ~vn} należących do tej przestrzeni takich, że układ wektorów{~v1, ~v2, . . . , ~vn} tworzy bazę tej przestrzeni.Twierdzenie 38. Każdy układ n liniowo niezależnych wektorów n-wymiarowej przestrzeniliniowej V tworzy bazę tej przestrzeni.Definicja 56. Bazę przestrzeni liniowej (Rn,+,R, ·), którą tworzą wektory
~e1 = [1, 0, . . . , 0], ~e2 = [0, 1, . . . , 0], . . . , ~en = [0, 0, . . . , 1]
nazywamy bazą kanoniczną tej przestrzeni.Definicja 57. Dwie przestrzenie liniowe (U,+,K, ·) oraz (V,⊕,K,�) nad tym samym cia-łem K nazywamy izomorficznymi, jeżeli istnieje wzajemnie jednoznaczne przekształcenieh : U → V przestrzeni U na V takie, że
1. h(~u1 + ~u2) = h(~u1)⊕ h(~u2) dla ~u1, ~u2 ∈ U ,
2. h(a · ~u) = a� h(~u) dla a ∈ K oraz ~u ∈ U .
Odwzorowanie h nazywamy izomorfizmem przestrzeni liniowych.Twierdzenie 39. Każda przestrzeń liniowa V wymiaru n nad ciałem K jest izomorficznaz przestrzenią liniową Kn.Definicja 58. Niech V i W będą przestrzeniami liniowymi nad tym samym ciałem K.Przekształceniem liniowym przestrzeni V w przestrzeń W nazywamy funkcję
f : V →W
taką, że dla dowolnych wektorów ~v1, ~v2 ∈ V i dowolnych α, β ∈ K zachodzi równość
f(α~v1 + β~v2) = αf(~v1) + βf(~v2).
29

Definicja 59. Obrazem przekształcenia liniowego f : V → W przestrzeni V w prze-strzeń W nazywamy zbiór =f tych wektorów w ∈W , dla których istnieje taki wektor ~v ∈ V ,że f(~v) = ~w, tzn.
=f = {~w ∈W : f(~v) = ~w} ⊂W.Definicja 60. Jądrem przekształcenia liniowego f : V → W przestrzeni V w prze-strzeń W nazywamy zbiór ker f tych wektorów ∈ V , dla których f(~v) = ~0, tzn.
ker f = {~v ∈ V : f(~v) = ~0} ⊂ V.
Twierdzenie 40. Obraz przekształcenia liniowego f : V →W przestrzeni V w przestrzeńW jest podprzestrzenią liniową przestrzeni liniowej W .Twierdzenie 41. Jądro przekształcenia liniowego f : V →W przestrzeni V w przestrzeńW jest podprzestrzenią liniową przestrzeni liniowej V .Twierdzenie 42. Niech f : V → W będzie przekształceniem liniowym przestrzeni V wprzestrzeń W nad tym samym ciałem K. Jeżeli przestrzeń V ma skończony wymiar, to
dim ker f + dim=f = dimV.
Definicja 61. Niech f : V → W będzie przekształceniem liniowym przestrzeni V w prze-strzeń W nad tym samym ciałem K. Niech wektory {~v1, ~v2, . . . , ~vn} będą bazą przestrzeniV , a wektory {~w1, ~w2, . . . , ~wm} bazą przestrzeni W . Każdy wektor f(~vi) , i = 1, . . . , n majednoznaczne przedstawienie w bazie przestrzeni W postaci
f(~vi) =m∑j=1
ajiwj , i = 1, . . . , n.
Macierzą przekształcenia f nazywać będziemy macierz
Af = [aji], i = 1, . . . , n, j = 1, . . . ,m.
Uwaga 12. Jeżeli macierz Af jest macierzą przekształcenia f : V →W , to:
1. liczba wierszy macierzy Af jest równa wymiarowi przestrzeni W ,
2. liczba kolumn macierzy Af jest równa wymiarowi przestrzeni V ,
3. kolumny macierzy Af są utworzone ze współrzędnych wektorów f(~vi), które są obra-zami wektorów bazy przestrzeni V ,
4. jeżeli dimV = dimW = n, to macierz Af jest macierzą kwadratową stopnia n.Przykład 2. Wyznaczyć macierz przekształcenia liniowego f : R2 → R3 określonego(w bazach kanonicznych) wzorem
f(~x) = f
([x1
x2
] )=
2x1 − x2
x1 + x2
2x2
.
30

Rozwiązanie:Mamy:
f
([10
] )=
210
oraz f
([01
] )=
−112
.
Stąd
Af =
2 −11 10 2
.
Twierdzenie 43. Jeśli f : V → W jest przekształceniem liniowym przestrzeni V w prze-strzeń W nad tym samym ciałem K, bazami przestrzeni V i W są odpowiednio układywektorów {~v1, ~v2, . . . , ~vn} i {~w1, ~w2, . . . , ~wm} oraz macierzą przekształcenia f w tych ba-zach jest macierz Af , to dla dowolnego wektora ~u ∈ V
f(~u) = Af · ~u
Przykład 3. Niech f będzie przekształceniem liniowym określonym w poprzednim przykła-
dzie i niech ~u =
[35
]. Wówczas
f(~u) = f
([35
])=
2 −11 10 2
· [ 35
]=
1810
.
Uwaga 13. aa
1. Różnym przekształceniom liniowym odpowiadają różne macierze.
2. Równym przekształceniom liniowym odpowiadają równe macierze.Definicja 62. Przekształcenie liniowe f : V → V nazywamy endomorfizmem przestrzeniV w siebie.Wniosek 12. Macierz endomorfizmu przestrzeni n-wymiarowej jest macierzą kwadratowąstopnia n.Twierdzenie 44. Niech f1 : V → W oraz f2 : W → U będą dwoma przekształceniamiliniowymi przestrzeni liniowych nad tym samym ciałem K i niech A1, A2 będą odpowiedniomacierzami tych przekształceń w ustalonych bazach. Wówczas:
1. złożenie f2 ◦ f1 : V → U jest przekształceniem liniowym,
2. macierz A przekształcenia f2 ◦ f1 jest iloczynem macierzy tych przekształceń, tzn.A = A2 ·A1 ,
3. dla dowolnego wektora ~v ∈ V
(f2 ◦ f1)(~v) = A2 ·A1 · ~v.
31

Definicja 63. Rozważmy endomorfizm f : V → V przestrzeni V nad ciałem K w sie-bie. Podprzestrzenią niezmienniczą względem przekształcenia f nazywamy podzbiór Uprzestrzeni V taki, że ∧
~u∈Uf(~u) ∈ U.
Twierdzenie 45. Jądro i obraz endomorfizmu f : V → V są podprzestrzeniami niezmien-niczymi względem przekształcenia f przestrzeni V .Definicja 64. Rozważmy przekształcenie liniowe f : Kn → Kn przestrzeni liniowej Kn
w siebie. Niezerowy wektor ~v ∈ Kn nazywamy wektorem własnym przekształcenia fodpowiadającym wartości własnej λ ∈ K, gdy
f(~v) = λ~v.
Twierdzenie 46. Jeżeli ~v jest wektorem własnym endomorfizmu f : Kn → Kn, to zbiórLin{~v} jest podprzestrzenią niezmienniczą względem przekształcenia f .Twierdzenie 47. Zbiór wektorów własnych endomorfizmu f : Kn → Kn odpowiadają-cych tej samej wartości własnej λ wraz z wektorem zerowym tworzą podprzestrzeń liniowąprzestrzeni liniowej Kn.Uwaga 14. Z definicji wektora własnego ~v przekształcenia liniowego f : Kn → Kn odpo-wiadającego wartości własnej λ wynika, że jeśli A jest macierzą przekształcenia f , to
f(~v) = A · ~v = λ~v,
więc(A− λ · In) · ~v = ~0.
In oznacza macierz jednostkową stopnia n.Definicja 65. Wielomianem charakterystycznym przekształcenia liniowego f : Kn → Kn
nazywamy wyznacznikW (λ) = det(A− λ · In).
Uwaga 15. Wielomian charakterystyczny przekształcenia liniowego f : Kn → Kn jestwielomianem stopnia n.Twierdzenie 48. Wielomian charakterystyczny przekształcenia liniowego f : Kn → Kn
nie zależy od wyboru bazy przestrzeni Kn.Definicja 66. Równaniem charakterystycznym przekształcenia liniowego f : Kn → Kn
nazywamy równanieW (λ) = 0,
czyli równaniedet(A− λ · In) = 0.
Twierdzenie 49. Liczba λ ∈ K jest wartością własna przekształcenia liniowegof : Kn → Kn wtedy i tylko wtedy, gdy jest pierwiastkiem równania charakterystycznegotego przekształcenia.
32

Wniosek 13. Przekształcenie liniowe przestrzeni n-wymiarowej w siebie ma co najwyżejn wartości własnych.
33