Algebra linowa w pigułce -...
61
Algebra Algebra linowa w pigulce Aleksander Denisiuk [email protected] Polsko-Japo ´ nska Wy ˙ zsza Szkola Technik Komputerowych Wydzial Informatyki w Gda ´ nsku ul. Brzegi 55 80-045 Gda ´ nsk Algebra – p. 1
Transcript of Algebra linowa w pigułce -...
Algebra
Algebra linowa w pigułce
Aleksander Denisiuk
Polsko-Japonska Wyzsza Szkoła Technik Komputerowych
Wydział Informatyki w Gdansku
ul. Brzegi 55
80-045 Gdansk
Algebra – p. 1
Algebra linowa w pigułce
Najnowsza wersja tego dokumentu dostepna jest pod adresemhttp://users.pjwstk.edu.pl/~denisjuk/
Algebra – p. 2
Układ równan linowych
{
x+ 2y = 6,
3x− y = 4
Algebra – p. 3
Układ równan linowych
{
x+ 2y = 6,
3x− y = 4⇒
{
y = 2,
x = 2(1)
Algebra – p. 3
Drugi układ
{
x+ 2y = 6,
3x+ 6y = 4
Algebra – p. 4
Drugi układ
{
x+ 2y = 6,
3x+ 6y = 4⇒ 0 = 14? (2)
Algebra – p. 4
Trzeci układ
{
x+ 2y = 6,
3x+ 6y = 18
Algebra – p. 5
Trzeci układ
{
x+ 2y = 6,
3x+ 6y = 18⇒ 0 = 0? (3)
Algebra – p. 5
Układ (2) jest sprzecznym
{
x+ 2y = 6,
3x+ 6y = 4
• brak rozwiazan
Algebra – p. 6
Układ (3) nie jest układem
{
x+ 2y = 6,
3x+ 6y = 18
Algebra – p. 7
Układ (3) nie jest układem
{
x+ 2y = 6,
3x+ 6y = 18⇐⇒ x+ 2y = 6
Algebra – p. 7
Układ (3) nie jest układem
{
x+ 2y = 6,
3x+ 6y = 18⇐⇒ x+ 2y = 6
• wiele rozwiazan:
◦ x = 2, y = 2◦ x = 4, y = 1◦ x = 6, y = 0
◦ x = 1
2, y = 11
4
Algebra – p. 7
Układ (3) nie jest układem
{
x+ 2y = 6,
3x+ 6y = 18⇐⇒ x+ 2y = 6
• wiele rozwiazan:
◦ x = 2, y = 2◦ x = 4, y = 1◦ x = 6, y = 0
◦ x = 1
2, y = 11
4
• x = 1, y = 1 nie jest rozwiazaniem
Algebra – p. 7
Układ (3) nie jest układem
{
x+ 2y = 6,
3x+ 6y = 18⇐⇒ x+ 2y = 6
• wiele rozwiazan:
◦ x = 2, y = 2◦ x = 4, y = 1◦ x = 6, y = 0
◦ x = 1
2, y = 11
4
• x = 1, y = 1 nie jest rozwiazaniem
• Rozwiazanie ogólne x = a, y = 1
2(6− a)
Algebra – p. 7
Podsumowanie
• Układ moze:
◦ miec jedyne rozwiazanie
◦ nie miec rozwiazan
◦ miec nieskonczenie wiele rozwiazan
• Układ nie moze miec dokładnie 2 rozwiazan
Algebra – p. 8
Wieksza ilosc niewiadomych
x+ 4y − 2z + 3t = 9,
2x− y − z − t = 4,
5x+ 7y + z − 2t = 7,
3x− 2y − 8z + 5t = 21.
• 2R1 + 3R2 −R3 ⇒ sprzecznosc
Algebra – p. 9
Wieksza ilosc niewiadomych
x+ 4y − 2z + 3t = 9,
2x− y − z − t = 4,
5x+ 7y + z − 2t = 7,
3x− 2y − 8z + 5t = 23.
• 2R1 + 3R2 −R3 ⇒ trzy równania, cztery niewiadome, układnieokreslony
Algebra – p. 10
Wieksza ilosc niewiadomych
{
x+ y + z + t = 1,
2x+ 2y + 2z + 2t = 0.
• Równan wiecej, niz niewiadomych, układ sprzeczny
Algebra – p. 11
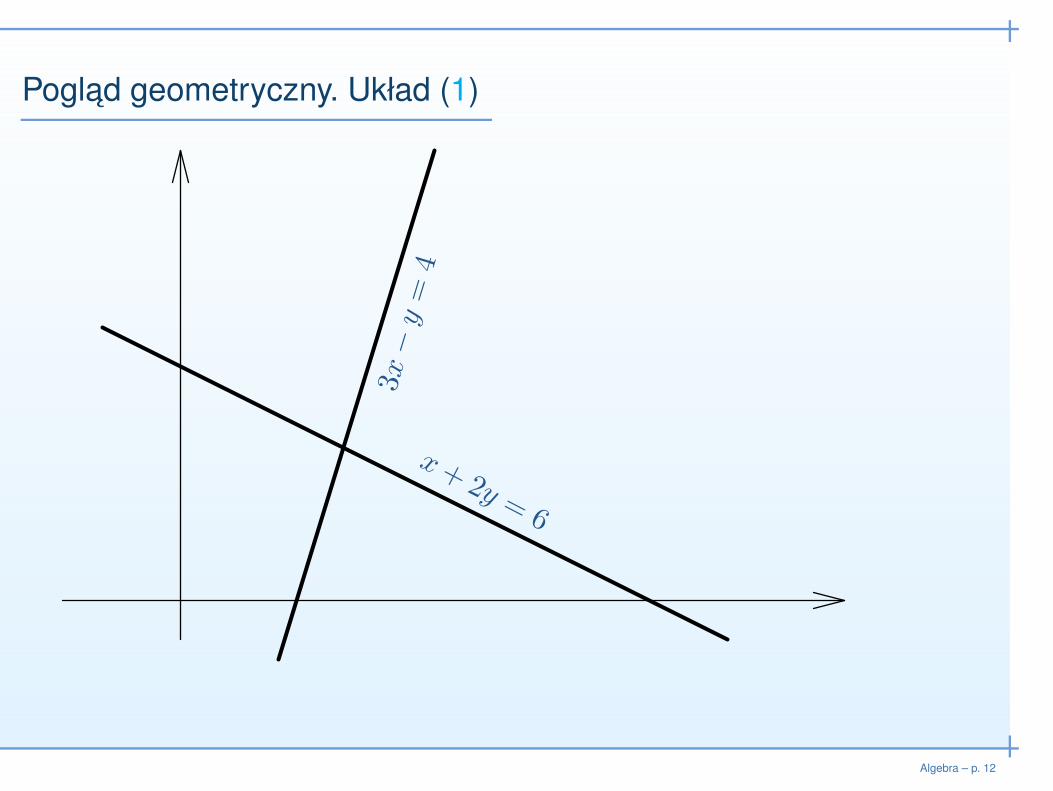
Poglad geometryczny. Układ (1)
x+ 2y = 6
3x−y=
4
Algebra – p. 12
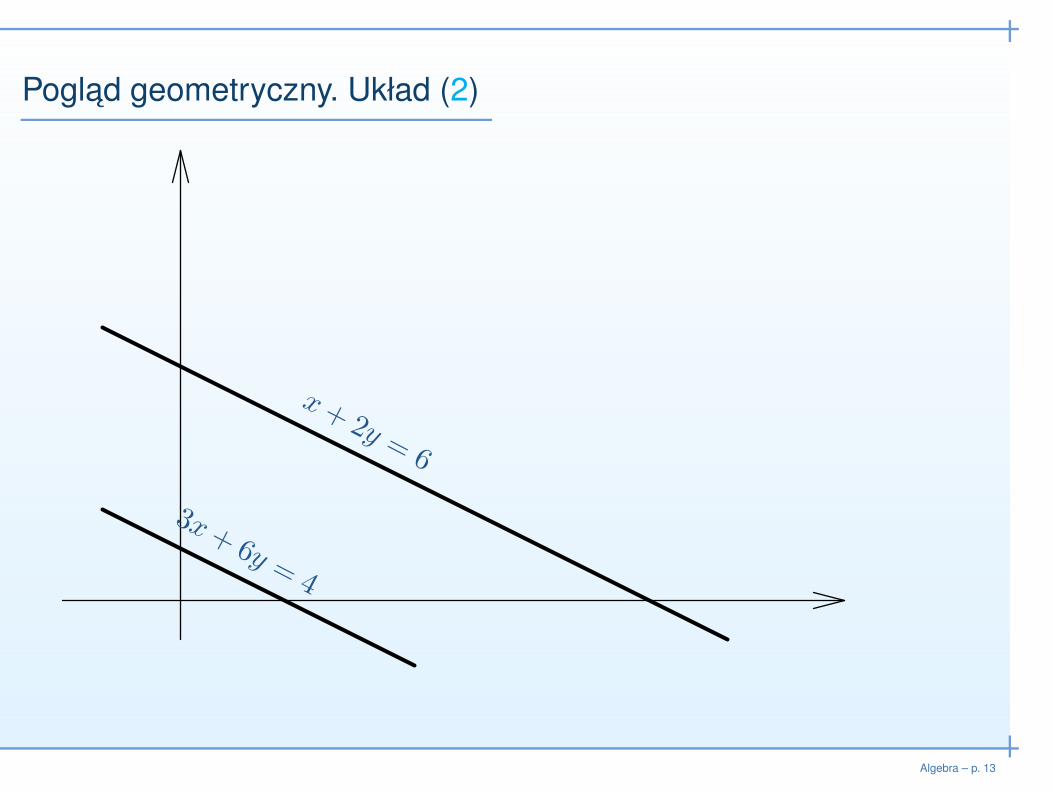
Poglad geometryczny. Układ (2)
x+ 2y = 6
3x+ 6y = 4
Algebra – p. 13
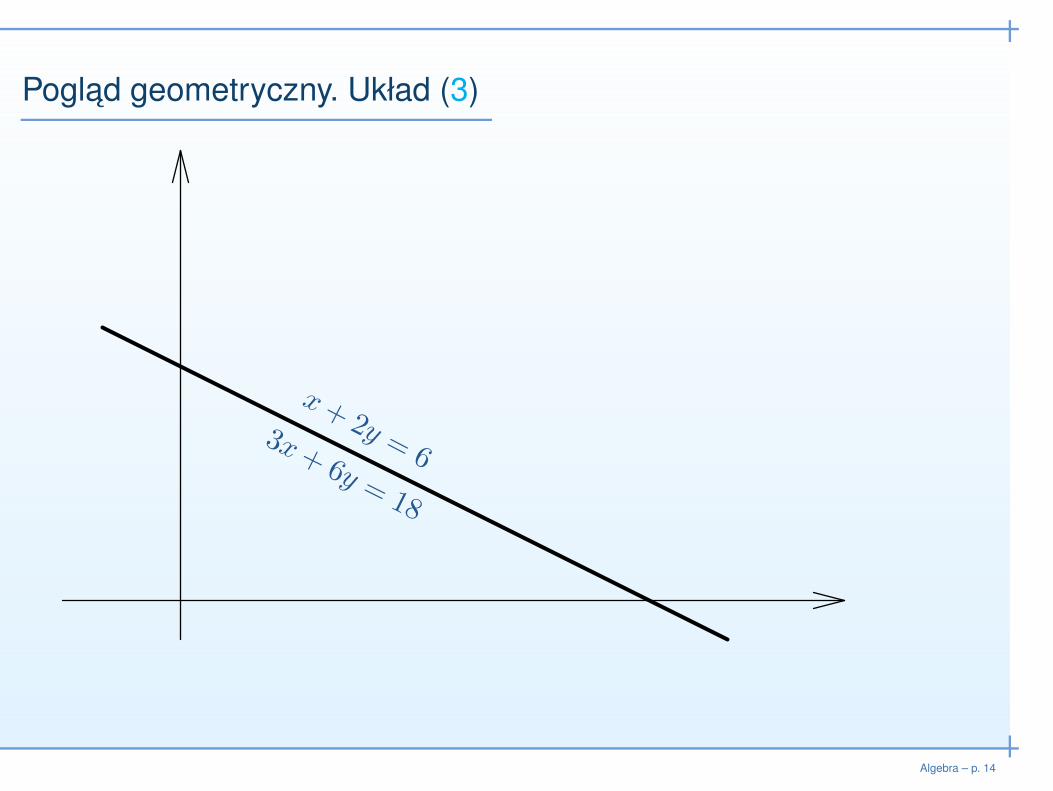
Poglad geometryczny. Układ (3)
x+ 2y = 63x+ 6y = 18
Algebra – p. 14
Ogólne podejscie geometryczne
• Dwie płaszczyzny (dwa układy współrzednych): (x, y)oraz (X,Y ).
• Kazdemu punktowi (x, y) przyporzadkujemy punkt (X,Y ),taki ze
{
x+ 2y = X,
3x− y = Y.
• Zeby rozwiazac układ (1), trzeba znalezc taki punkt (x, y),ze dla odpowiedniej pary (X,Y ) spełniona była równosc
(X,Y ) = (6, 4).
Algebra – p. 15
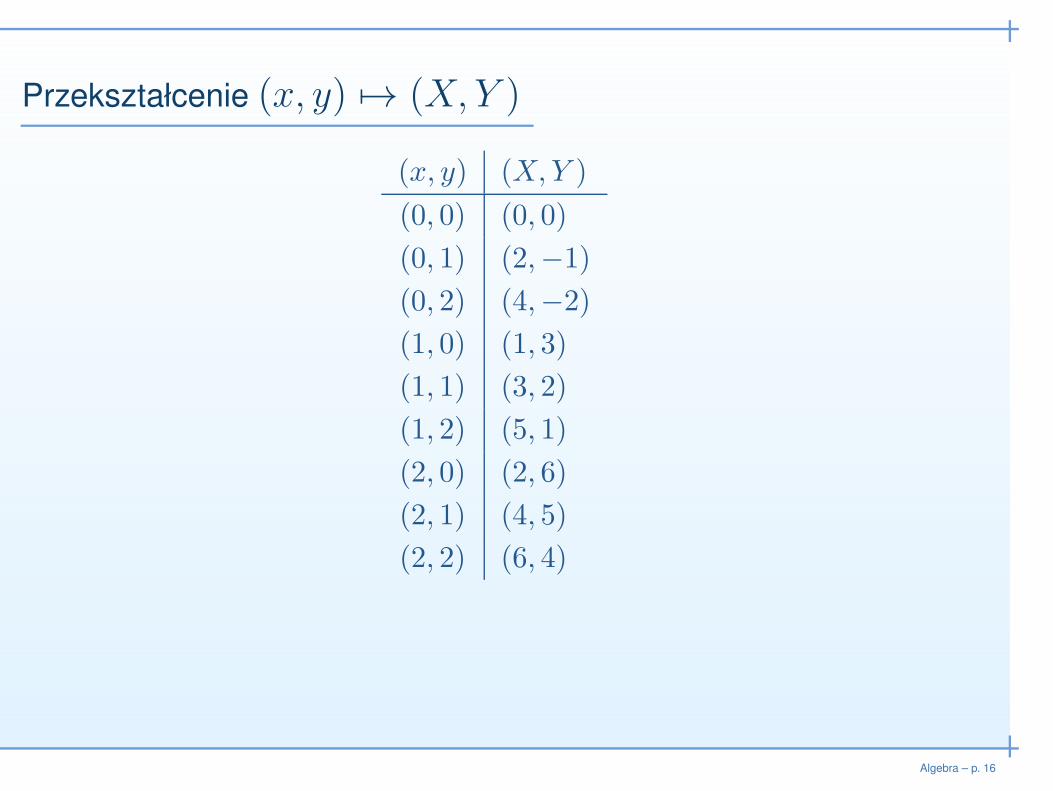
Przekształcenie (x, y) 7→ (X,Y )
(x, y) (X,Y )
(0, 0) (0, 0)
(0, 1) (2,−1)
(0, 2) (4,−2)
(1, 0) (1, 3)
(1, 1) (3, 2)
(1, 2) (5, 1)
(2, 0) (2, 6)
(2, 1) (4, 5)
(2, 2) (6, 4)
Algebra – p. 16
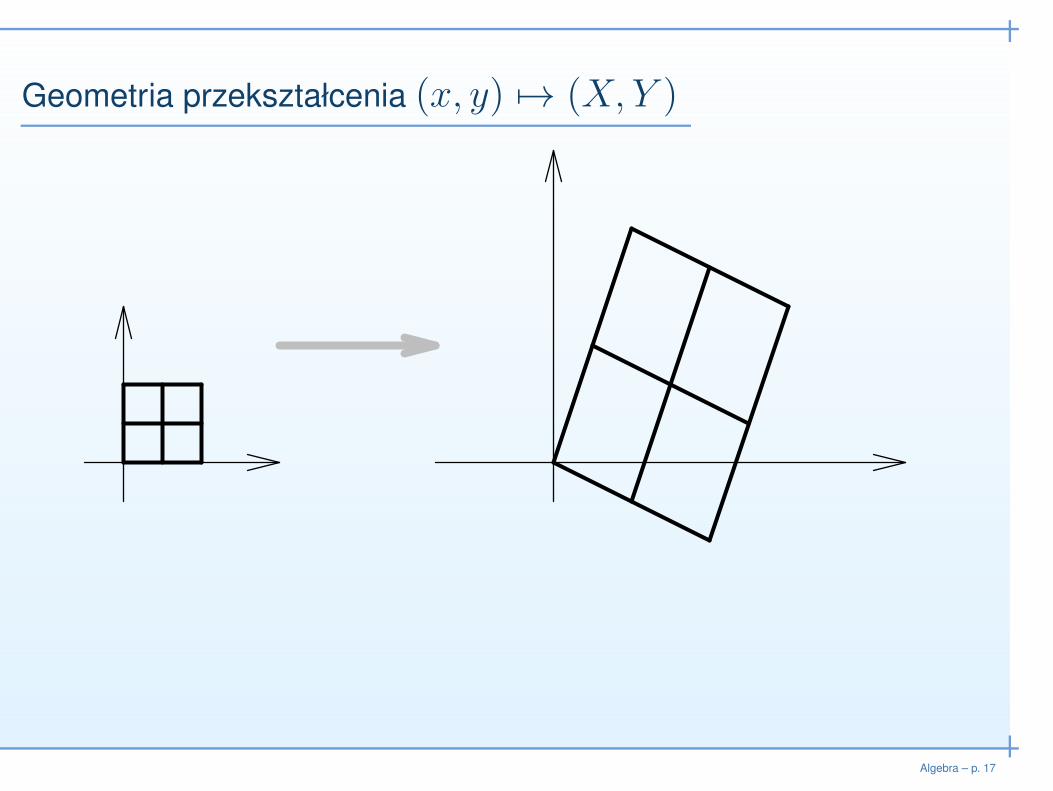
Geometria przekształcenia (x, y) 7→ (X,Y )
Algebra – p. 17
Analiza układu (1)
• Obrazem kwadratów sa równoległoboki.
• Kazdy punkt na płaszczyznie (X,Y ) jest obrazem pewnego
punktu (x, y) ⇒ dla kazdych (X,Y ) układ bedzie miałrozwiazanie.
• Rózne (x, y) przechodza do róznych (X,Y ) ⇒ rozwiazaniejest jednoznaczne.
Algebra – p. 18
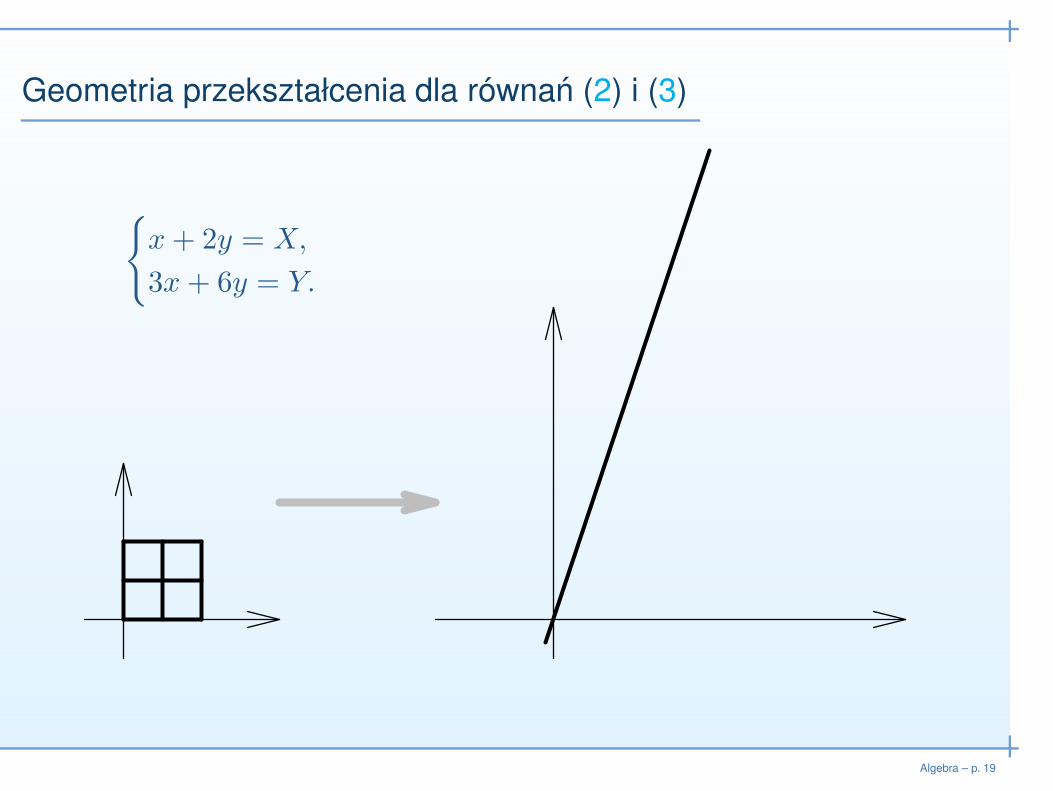
Geometria przekształcenia dla równan (2) i (3)
{
x+ 2y = X,
3x+ 6y = Y.
Algebra – p. 19
Analiza układów (2) i (3)
• Obrazem całej płaszczyzny jest prosta.
• (6, 4) nie lezy na tej prostej ⇒ układ (2) nie ma rozwiazan.
• (6, 18) lezy na prostej ⇒ układ (3) ma rozwiazania.
• Cała prosta x+ 2y = 6 zostaje spłaszczona do punktu(6, 18) ⇒ układ (3) ma nieskonczenie wiele rozwiazan.
Algebra – p. 20
Analiza ogólnego układu
{
ax+ by = X
cx+ dy = Y
• Własciwosci układu zaleza od własciwosci przekształcenia(x, y) 7→ (ax+ by, cx+ dy)
ax+ by + cz = X
dx+ ey + fz = Y
gx+ hy + kz = Z
• (x, y, z) 7→ (ax+ by + cz, dx+ ey + fz, gx+ hy + kz)
Algebra – p. 21
Jezyk teorii mnogosci
{
ax+ by = X,
cx+ dy = Y.
• Układ ma rozwiazanie ⇐⇒ (X,Y ) nalezy do obrazu
przekształcenia T (x, y) 7→ (ax+ by, cx+ dy)
(X,Y ) ∈ Im(T )
Algebra – p. 22
Jaki moze byc obraz T ?
• Płaszczyzna — układ (1)
• Prosta — układy (2) oraz (3)
Algebra – p. 23
Jaki moze byc obraz T ?
• Płaszczyzna — układ (1)
• Prosta — układy (2) oraz (3)
• Punkt — układ trywialny :
{
0x+ 0y = X,
0x+ 0y = Y.
Algebra – p. 23
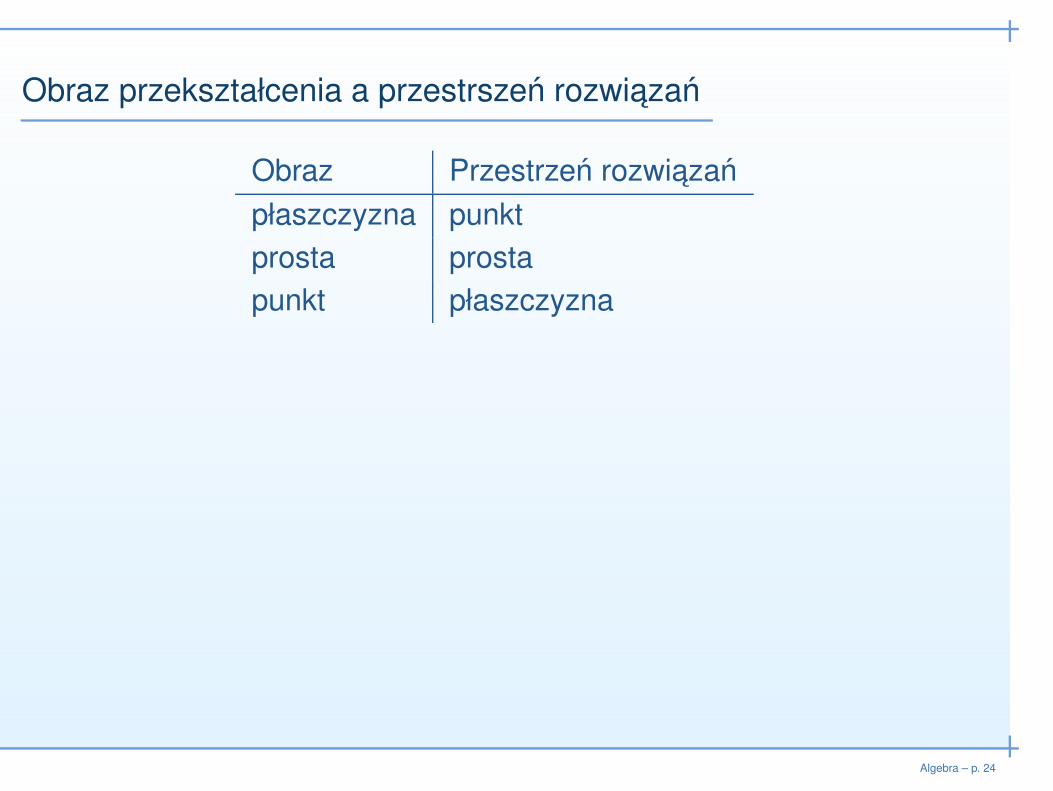
Obraz przekształcenia a przestrszen rozwiazan
Obraz Przestrzen rozwiazan
płaszczyzna punkt
prosta prosta
punkt płaszczyzna
Algebra – p. 24
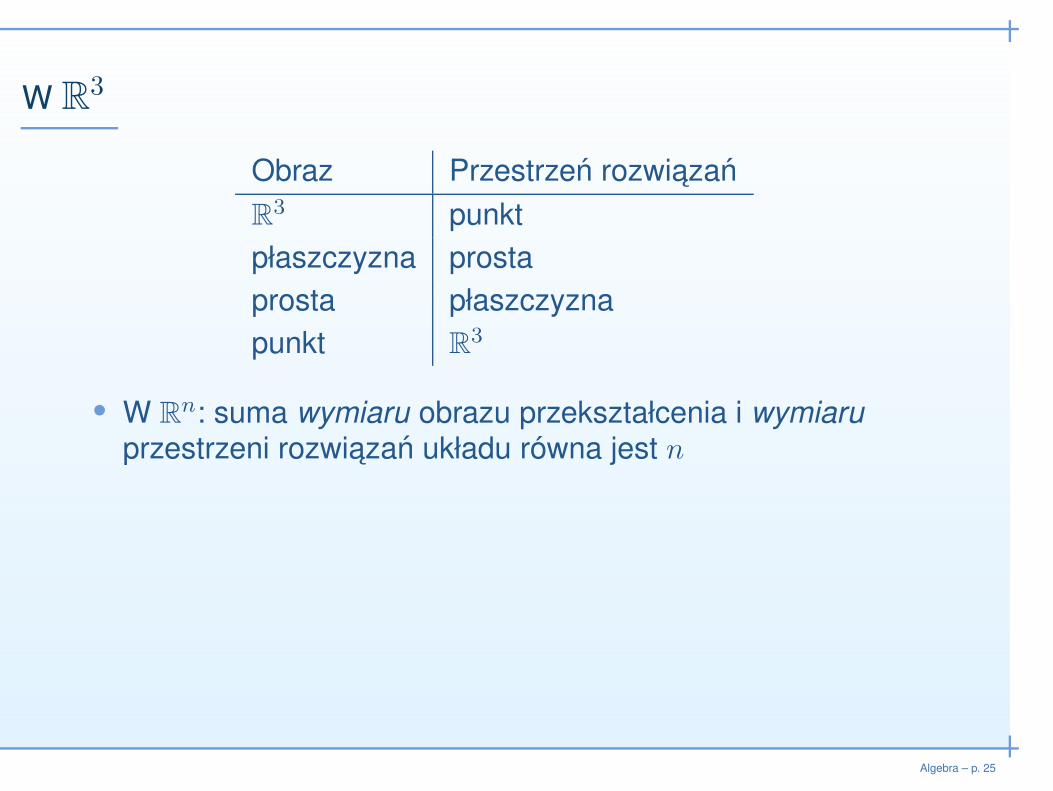
W R3
Obraz Przestrzen rozwiazan
R3 punkt
płaszczyzna prosta
prosta płaszczyzna
punkt R3
• W Rn: suma wymiaru obrazu przekształcenia i wymiaru
przestrzeni rozwiazan układu równa jest n
Algebra – p. 25
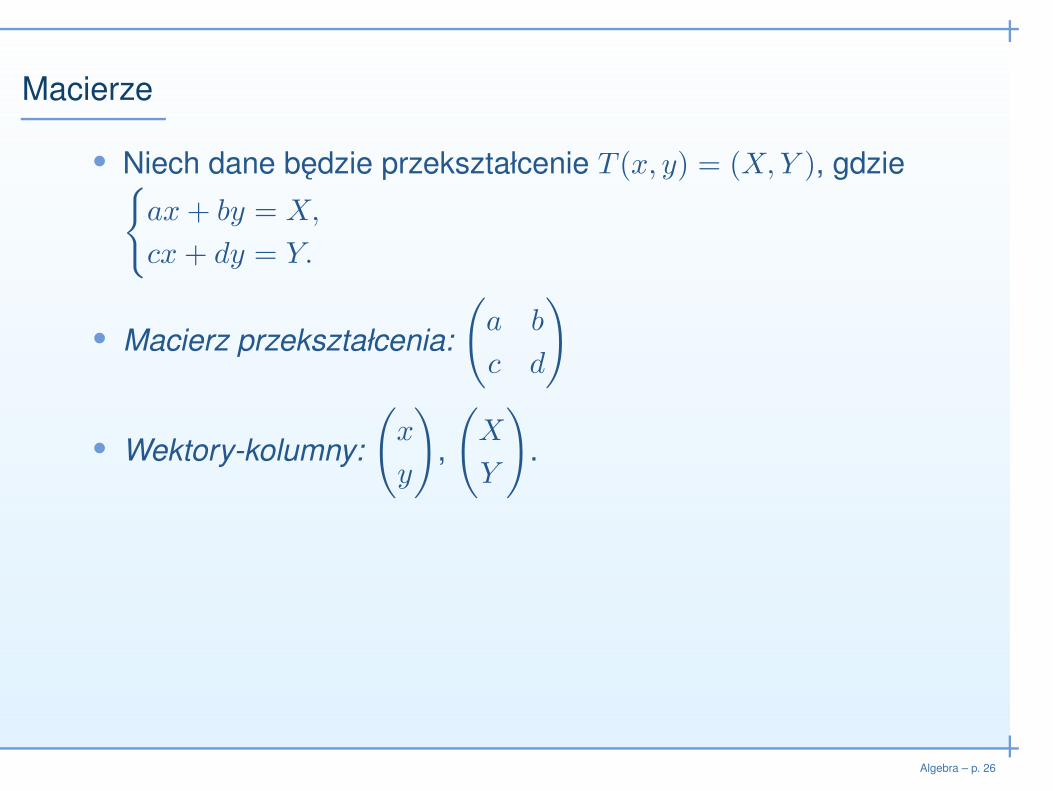
Macierze
• Niech dane bedzie przekształcenie T (x, y) = (X,Y ), gdzie{
ax+ by = X,
cx+ dy = Y.
• Macierz przekształcenia:
(
a b
c d
)
• Wektory-kolumny:
(
x
y
)
,
(
X
Y
)
.
Algebra – p. 26
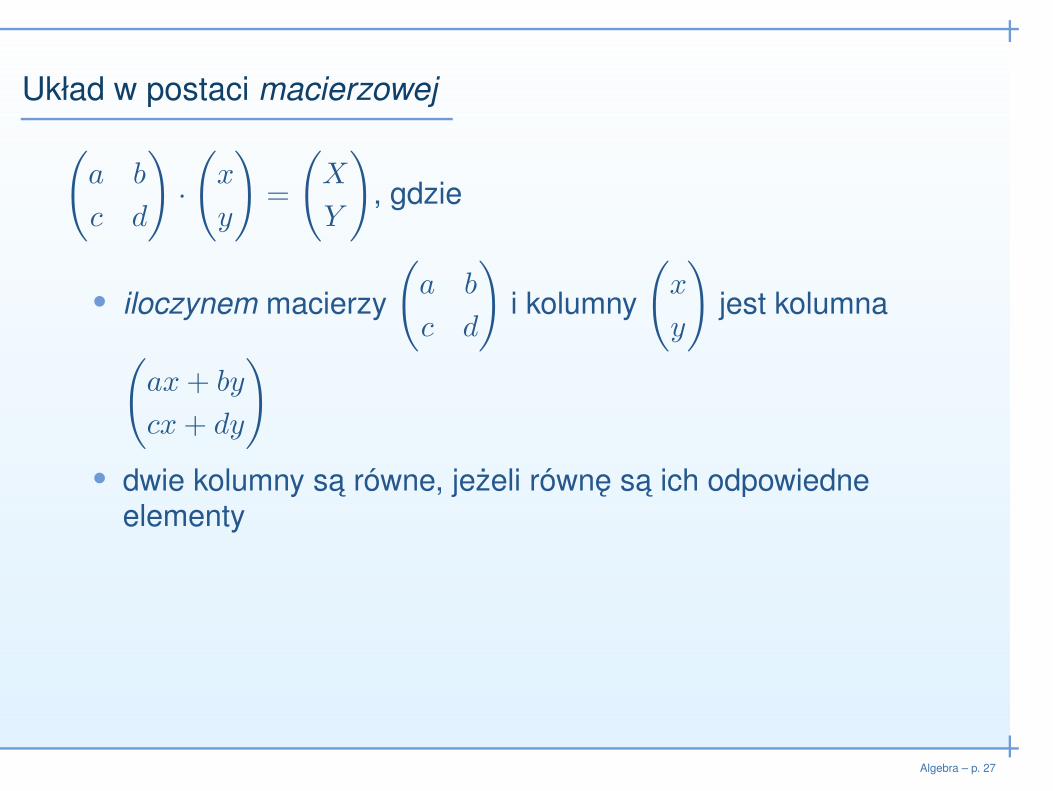
Układ w postaci macierzowej
(
a b
c d
)
·
(
x
y
)
=
(
X
Y
)
, gdzie
• iloczynem macierzy
(
a b
c d
)
i kolumny
(
x
y
)
jest kolumna
(
ax+ by
cx+ dy
)
• dwie kolumny sa równe, jezeli równe sa ich odpowiedneelementy
Algebra – p. 27
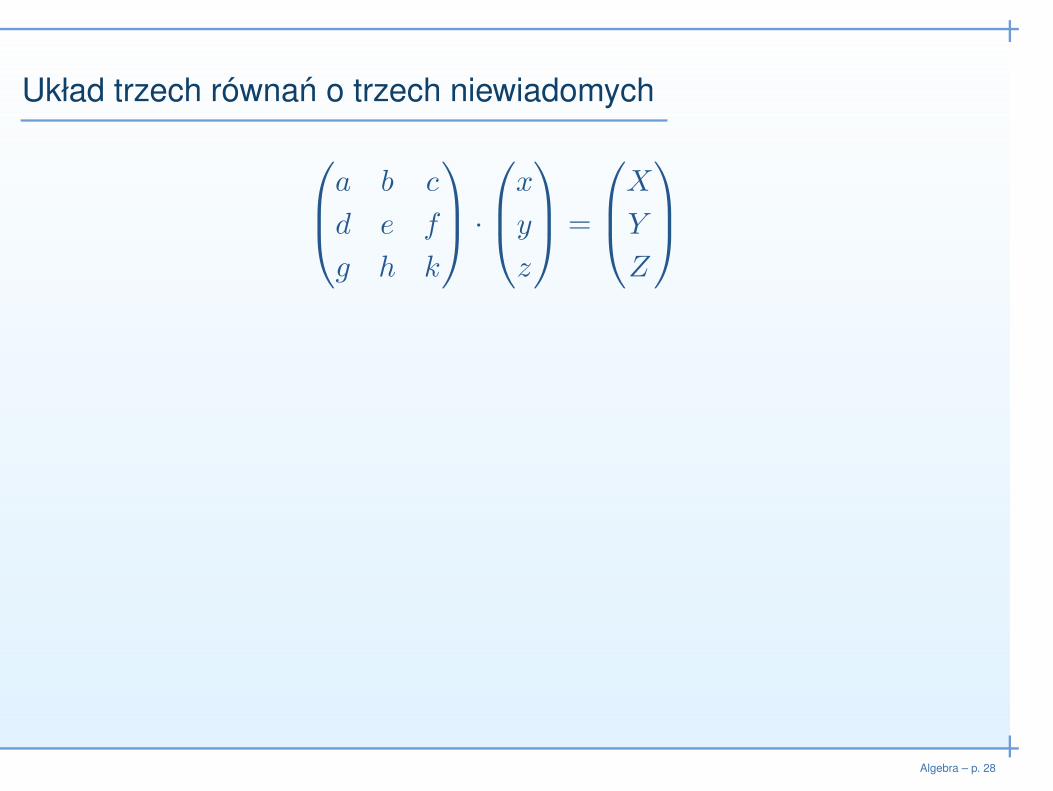
Układ trzech równan o trzech niewiadomych
a b c
d e f
g h k
·
x
y
z
=
X
Y
Z
Algebra – p. 28
Mnozenie przekształcen
• Niech dane bedzie drugie przekształcenie,
U(X,Y ) = (X,Y), gdzie
{
AX +BY = X,
CX +DY = Y.czyli
(
A B
C D
)
·
(
X
Y
)
=
(
X
Y
)
• Iloczynem przekształcen T i U jest przekształcenie złozoneUT (x, y) = U(X,Y ) = (X,Y)
Algebra – p. 29
Macierz iloczynu przekształcen
• X = AX +BY = A(ax+ by) +B(cx+ dy) =(Aa+Bc)x+ (Ab+Bd)y
• Y = CX +DY = C(ax+ by) +D(cx+ dy) =(Ca+Dc)x+ (Cb+Dd)y
•
(
Aa+Bc Ab+Bd
Ca+Dc Cb+Dd
)
·
(
x
y
)
=
(
X
Y
)
•
(
A B
C D
)
·
(
a b
c d
)(
x
y
)
=
(
X
Y
)
Algebra – p. 30
Definicja iloczynu macierzy
(
A B
C D
)
·
(
a b
c d
)
=
(
Aa+Bc Ab+Bd
Ca+Dc Cb+Dd
)
Algebra – p. 31
Przykład
• Niech G bedzie symetria wzgledem osi Ox
• Niech H obrotem dookoła srodka współrzednych o kat 90◦
zgodnie ze wskazuwka zegara.
• G(x, y) = (x,−y), macierz G =
(
1 0
0 −1
)
.
• H(x, y) = (y,−x), macierz H =
(
0 1
−1 0
)
.
• Macierz GH =
(
1 0
0 −1
)
·
(
0 1
−1 0
)
=
(
0 1
1 0
)
Algebra – p. 32
Obrót
• Niech Rθ bedzie obrotem o kat θ.
• Macierz Rθ =
(
cos θ − sin θ
sin θ cos θ
)
.
• Niech Rϕ bedzie obrotem o kat ϕ.
• Macierz Rϕ =
(
cosϕ − sinϕ
sinϕ cosϕ
)
.
• Iloczyn obrotów RθRϕ = Rθ+ϕ
• Macierz Rθ+ϕ =
(
cos(θ + ϕ) − sin(θ + ϕ)
sin(θ + ϕ) cos(θ + ϕ)
)
Algebra – p. 33
Obrót
• Iloczyn macierzy
RθRϕ =
(
cos θ − sin θ
sin θ cos θ
)
·
(
cosϕ − sinϕ
sinϕ cosϕ
)
=
(
cos θ cosϕ− sin θ sinϕ − cos θ sinϕ− sin θ cosϕ
sin θ cosϕ+ cos θ sinϕ − sin θ cosϕ+ cos θ cosϕ
)
=
(
cos(θ + ϕ) − sin(θ + ϕ)
sin(θ + ϕ) cos(θ + ϕ)
)
.
• Wniosek:
◦ cos(θ + ϕ) = cos θ cosϕ− sin θ sinϕ,
◦ sin(θ + ϕ) = sin θ cosϕ+ cos θ sinϕ.
Algebra – p. 34
Wektory n-wymiarowe
• Zmiana oznazcen
•
(
x
y
)
(
x1
x2
)
x1...
xn
•
x
y
z
x1
x2
x3
x1...
xn
Algebra – p. 35
Dodawanie wektorów
(
x
y
)
+
(
z
t
)
=
(
x+ z
z + t
)
(
x1
x2
)
+
(
y1
y2
)
=
(
x1 + y1
x2 + y2
)
x1...
xn
+
y1...
yn
=
x1 + y1...
xn + yn
Algebra – p. 36
Mnozenie wektorów przez α ∈ R
α
(
x
y
)
=
(
αx
αy
)
α
(
x1
x2
)
=
(
αx1
αx2
)
α
x1...
xn
=
αx1...
αxn
Algebra – p. 37
Macierze n-wymiarowe
(
a b
c d
)
(
a11 a12
a21 a22
)
a11 · · · a1n...
. . ....
an1 · · · ann
Algebra – p. 38
Mnozenie macierzy przez wektor
(
a b
c d
)(
x
y
)
=
(
ax+ by
cx+ dy
)
(
a11 a12
a21 a22
)(
x1
x2
)
=
(
a11x1 + a12x2
a21x1 + a22x2
)
a11 · · · a1n...
. . ....
an1 · · · ann
x1...
xn
=
a11x1 + · · ·+ a1nxn...
an1x1 + · · ·+ annxn
Algebra – p. 39
Wygodne oznaczenie dla sumy
• x1 + · · ·+ xn =n∑
i=1
xi
Algebra – p. 40
Wygodne oznaczenie dla sumy
• x1 + · · ·+ xn =n∑
i=1
xi
• a11x1 + · · ·+ a1nxn =n∑
i=1
a1ixi
Algebra – p. 40
Wygodne oznaczenie dla sumy
• x1 + · · ·+ xn =n∑
i=1
xi
• a11x1 + · · ·+ a1nxn =n∑
i=1
a1ixi
•
a11 · · · a1n...
. . ....
an1 · · · ann
x1...
xn
=
n∑
i=1
a1ixi
...n∑
i=1
anixi
Algebra – p. 40
Abstrakcyjna przestrzen wektorowa
• Zbiór X, na którym okreslone sa dwa dzalania
◦ dodawanie+ : X× X → X
(X,Y ) 7→ X + Y
◦ mnozenie przez liczbe rzeczywista (skalowanie)
· : R× X → X
(α,X) 7→ α ·X(= αX)
◦ nawyza sie przestrzenia wektorowa (liniowa), jezelispełnione sa warunki:
Algebra – p. 41
Przestrzen wektorowa. Dodawanie
• Dodawanie wektorów jest łaczne:
◦ ∀X,Y,Z ∈ X zachodzi (X + Y ) + Z = X + (Y + Z)
• Dodawanie wektorów jest przemienne:
◦ ∀X,Y ∈ X jest X + Y = Y +X
• Dodawanie wektorów ma element neutralny:
◦ ∃0 ∈ X, nazywany wektorem zerowym, ze X +0 = X dladowolnego X ∈ X.
• Dodawanie wektorów pozwala na odejmowanie:
◦ ∀X ∈ X istnieje element X ′ ∈ X, nazywany wektoremprzeciwnym do X, taki, ze X +X ′ = 0 (wygodne
oznaczenie: X ′ = −X).
Algebra – p. 42
Przestrzen wektorowa. Skalowanie
• Skalowanie jest rozdzielne wzgledem dodawania wektorów:
◦ ∀λ ∈ R X,Y ∈ X zachodzi α(X + Y ) = αX + αY
• Skalowanie jest rozdzielne wzgledem dodawania liczb:
◦ ∀α, β ∈ R X ∈ X jest (α+ β)X = αX + βX
• Skalowanie jest zgodne z mnozeniem liczb:
◦ ∀α, β ∈ R X ∈ X jest α(βX) = (αβ)X
• ∀X ∈ X jest 1 ·X = X.
Algebra – p. 43
Przestrzen wektorowa. Przykłady
• Rn
• Wielomiany R[x]
• Wielomiany dwóch zmiennych R[x, y]
• Szeregi potegowe R[[x]]
◦ a0 + a1x+ a2x2 + · · · =
∞∑
i=0
aixi
Algebra – p. 44
Przekształcenia liniowe
• Przekształcenie L : X → X, X 7→ L(X) = LX nazywa sieliniowym, jezeli:
◦ ∀X,Y ∈ X spełniono jest L(X + Y ) = LX + LY
◦ ∀α ∈ R,∀X ∈ X spełniono jest L(αX) = αLX
Algebra – p. 45
• Uporzadkowac strony (wyniki wyszukiwania)
• Waznosc strony P jest W (P )
• Niech strona Pj ma li odnosników
• Jezeli Pj ma link na Pi, strona Pj przekazuje W (Pj)/ljswojej waznosci na Pi
• Waznosc Pi wyniesie
W (Pi) =∑
Pj∈Bi
W (Pj)
lj,
gdzie Bi jest zbiorem stron z odnosnikami do Pi
Algebra – p. 46
Google — podejscie algebraiczne
• Macierz hiperlinków H:
hij =
1
lj, jezeli pj ∈ Bi
0 w pozostałych przypadkach
◦ hij > 0
◦∑
i hij = 1
◦ H jest macierza stochastyczna
• Wektor waznosci W =
w1
.
.
.
wn
Algebra – p. 47
Google — Równanie waznosci
• Wi =∑
Pj∈Bi
Wj
lj=
n∑
j=1
hijWj
• Równanie waznosci W = HW
• W jest wektorem stacjonarnym przekształcenia H
• Dla stochastycznej macierzy istnieje jednoznacznieokreslony wektor stacjonarny o dodatnich współrzednych
Algebra – p. 48
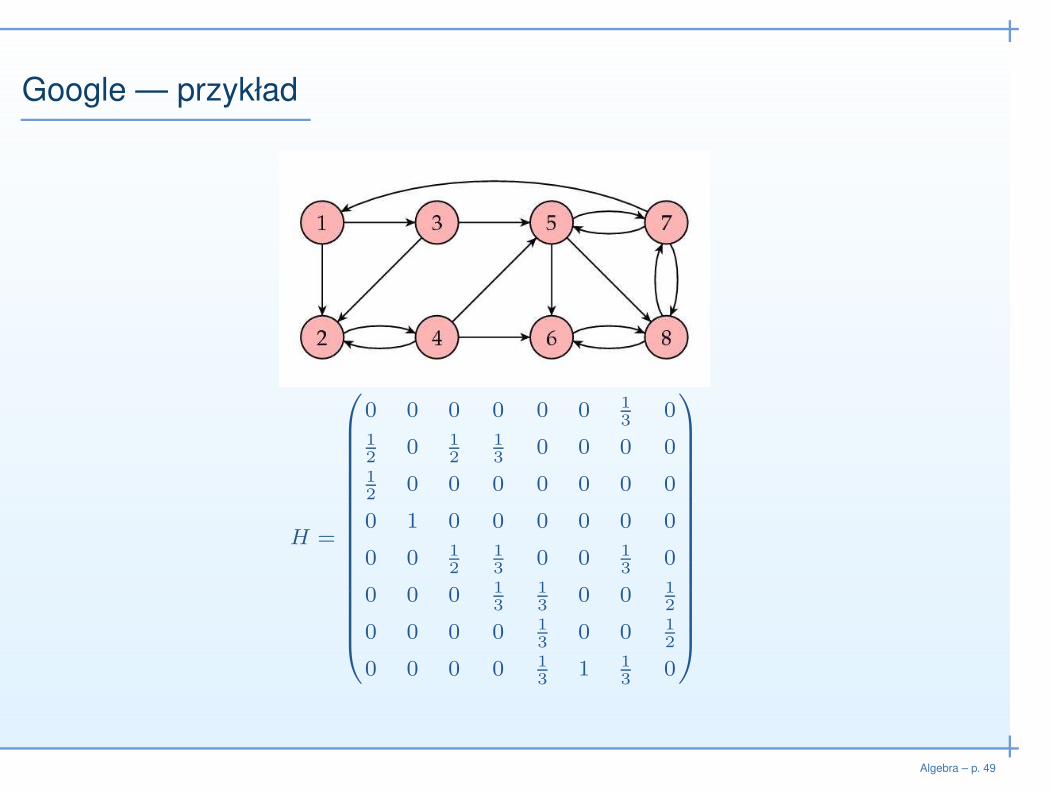
Google — przykład
H =
0 0 0 0 0 01
30
1
20
1
2
1
30 0 0 0
1
20 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 01
2
1
30 0
1
30
0 0 01
3
1
30 0
1
2
0 0 0 01
30 0
1
2
0 0 0 01
31
1
30
Algebra – p. 49
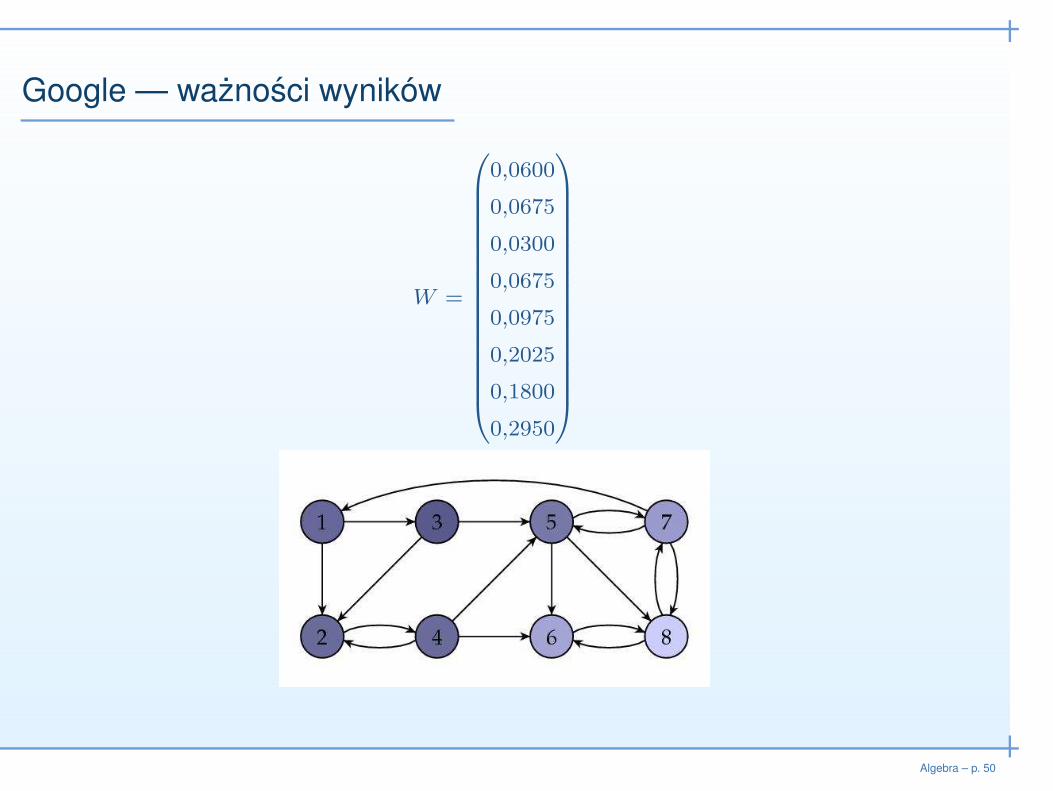
Google — waznosci wyników
W =
0,0600
0,0675
0,0300
0,0675
0,0975
0,2025
0,1800
0,2950
Algebra – p. 50
Literatura
Literatura
[1] IAN STEWART: Concepts of Modern Mathematics, PenguinBooks, 1975.
[2] DAVID AUSTIN: How Google Finds Your Needle in the Web’sHaystack, AMS Feature Column, December 2006,http://www.ams.org/samplings/feature-column/fcarc-pagerank.
Algebra – p. 51