
Abcpw.bg.pw.edu.pl/Content/767/12zdau_kryterium.pdf · Kryterium Routha-Hurwitza Równanie...
16
156 Podstawiaj c (6.38) do (6.37), znaleziono j<J t r \ i ° • x Q cos(w o t) + jsin(w Q t)l, 3S(u t) jsinfw t) . 0 0 1 J - x o e (6.39) Obydwa rozwi zania (6.39) s zespolone. Jeżeli teraz przyjmie si , że x=(x+x)/2, to z (6.39) otrzyma si odpowiedź rzeczy 1 2 wista (i zgodn z intuicj ) x = x cos (w Q (6.40) 6.3.2. Kryterium Routha Hurwitza Równanie charakterystyczne układu liniowego (6.31) lub (6.35) można przedstawić w postaci 4) a Q s n + a^"" 1 + + a s nl a=0. (6.41) Warunkiem koniecznym globalnej stabilności asymptotycznej układu o równaniu charakterystycznym (6.41) jest wymóg aby wszystkie współczynniki a równania (6.41) spełniały warunek Warunkiem dostatecznym aby wszystkie podwyznaczniki Ai (i=2,3,. . . ,n l) wyznacznika An o budowie: i=2: A i-3l A 3 = itd aż do i=n l (6.42) były wi ksze od zera. Jeżeli jeden lub wi cej niż jeden podwyznacznik (6.42) jest równy zeru, to układ jest stabilny globalnie ale nie asympto tycznie (w układzie wyst puj niegasn ce drgania o stałej am plitudzie) . 4) Spotyka si również inn postać tego równania: współczynnik przy najwyższej pot dze s, a wi c iT jest a , a nie a . Czy telnik za chwil sprawdzi, ze postać (6.41) prowadzi do łat wiejszych do zapami tania algorytmów badania stabilności.
Transcript of Abcpw.bg.pw.edu.pl/Content/767/12zdau_kryterium.pdf · Kryterium Routha-Hurwitza Równanie...
- 156 -
Podstawiając (6.38) do (6.37), znaleziono
j<J t r \
i ° • xQ cos(wot) + jsin(w Q t)l,
3S(u t ) - jsinfw t) .0 0 1
J
- x o e
( 6 . 3 9 )
Obydwa rozwiązania (6.39) są zespolone. Jeżel i teraz przyjmie
s i ę , że x=(x+x)/2, to z (6.39) otrzyma się odpowiedź rzeczy-1 2
wista (i zgodną z intuicją)x = x cos (wQ
(6.40)
6.3.2. Kryterium Routha-Hurwitza
Równanie charakterystyczne układu liniowego (6.31) lub
(6.35) można przedstawić w postaci4)
aQsn + a^""1 + + a sn-l
a = 0 . (6.41)
Warunkiem koniecznym globalnej stabilności asymptotycznej
układu o równaniu charakterystycznym (6.41) jest wymóg aby
wszystkie współczynniki a równania (6.41) spełniały warunek
Warunkiem dostatecznym - aby wszystkie podwyznaczniki Ai
( i=2,3, . . . ,n-l) wyznacznika An o budowie:
i=2: A i-3l A3 = itd aż do i=n-l
(6.42)były większe od zera.
Jeżeli jeden lub więcej niż jeden podwyznacznik (6.42) jestrówny zeru, to układ jest stabilny globalnie ale nie asympto-tycznie (w układzie występują niegasnące drgania o stałej am-plitudzie) .
4)Spotyka się również inną postać tego równania: współczynnikprzy najwyższej potędze s, a więc iT jest a , a nie a . Czy-telnik za chwilę sprawdzi, ze postać (6.41) prowadzi do ł a t -wiejszych do zapamiętania algorytmów badania stabilności.

- 157 -
Przykład 6.6Równanie charakterystyczne układu ma postać 2s3+4s2+10s+3=0.
Sprawdzić stabilność układu.Warunek konieczny jest tu spełniony, bo wszystkie współ-
czynniki wielomianu są dodatnie i różne od zera. Dla sprawdze-nia warunku dostatecznego wprowadza się oznaczenia: a =2, a =4,a =10 oraz a =3. Stopień n wielomianu charakterystycznego jesttu równy 3. Wystarczy więc sprawdzić jeden podwyznacznik:
= 40-6 = 34 > 0.4 3
2 10
Układ jest więc stabilny globalnie i asymptotycznie.
Przykład 6.7
Ponawia się zadanie przykładu 6.6 dla równania charakterys-tycznego: 3s4+2s3+5sz+3s+4=0.
Warunek konieczny jest tu spełniony. Badania podwyznaczni-ków dają
2 3 03 5 4 = -13 < 0.0 2 3
A =2
= 10-9 = 1 > 0;
0.
Badany układ jest niestabilny.
Przykład 6.8
W tym przykładzie równanie charakterystyczne ma postać
4s3+2s2+4 , 5s+2 , 25=0 .
Warunek konieczny jest tu spełniony, ale
2 2,25
2 4 4,5
Tym samym układ jest stabilny globalnie ale nie asymptotycznie.
Przykład 6.9
Rozpatruje się podobne równanie charakterystyczne jak w
przykładzie 6.7 ale dla aa=0: 3s4+2s3+3s+4=0.
Układ jest niestabilny ponieważ nie jest spełniony warunek
konieczny (a =0).
Przykład 6.10
Dla utrzymania stałości prędkości kątowej u śmigła samolotu
niezbędne jest przestawianie kąta natarcia <p śmigła w zależnoś-

- 158 -
ci od wysokości lotu.
Na rys.6.4a pokazano układ automatycznej regulacji prędkoś-
ci w przez zmianę kąta <p (schemat aparaturowy) . Schemat blokowy
tego układu pokazano na rys.6.4b.
a) % J
Nastawienie
b)
AM, fs) łx-v AM/s)O
AM IsJ
(moment)
CZŁONNASTAW.
SILNIK = OBIEKT
ńw(s)CZtONWYKON. Auls)
m
(s)
(s)
G2(s) =
REGULATORtOOOk
0,12sz+3s*1000
Ryr.6.4. Układ automatycznej regulacji kąta <p natarcia śmigłasamolotu: a) schemat aparaturowy; b) schemat blokowy

- 159 -
Transmitancja operatorowa układu otwartego
G (s) = 1 0 0 Q k .0 (s+1)(0,12s2+3s+1000)S
Należy określić wartość k, dla której układ z ujemnym sprzęże-
niem zwrotnym jest jeszcze stabilny.
Równanie charakterystyczne układu zamkniętego otrzymuje się
po uwzględnieniu (6.45): (s+1) (0,12sz+3s+1000) s+1000k=0, czyli
0,12s*+3,12s3+1003s2+1000s+1000k=0. Ponieważ A 2 = | Q ' ^ |
to należy określić A i znaleźć taką wartość k, dla której
A =0, czyli zachodzi stabilność obojętna3
3,12 1000 0
0,12 1003 lOOOk
0 3,12 1000
= 3,12(1003-1000-3,12-1000k) +
- 1000'0,12-1000 = 0.
Po rozwiązanniu równania A =0 względem k otrzymano k=309,15.
Układ jest więc stabilny asymptotycznie gdy k<309,15.
6.3.3. Kryterium Nyąuista
Kryterium Nyąuista pozwala na określenie stabilności układu
zamkniętego na podstawie charakterystyki amplitudowo-fazowej
układu otwartego, wyznaczonej analitycznie lub doświadczalnie.
Ma ono duże znaczenie praktyczne, szczególnie w przypadku ukła-
dów rzeczywistych, które może być trudno opisać analitycznie.
Na rys.6.5 pokazano, jak z układu zamkniętego uzyskuje się
układ otwarty (przerwanie pętli sprzężenia zwrotnego przed węz-
łem sumacyjnym). Transmitancje operatorowe układów zamkniętych
G (s) oraz G (s) dla przypadku a) i b) sa_ różne ale trans-z,a ztb
mitancje obydwu układów otwartych są takie same
L («)L (a)
Warto tu wyjaśnić, że równania charakterystyczne układów otwar-tych
<pQ(s) - M^sJM^s) = 0 (6.44)
oraz zamkniętych
są w obydwu przypadkach również identyczne
+M i(s)M z(s), (6.45)

- 160 -
a)
Ljts!
Mi'S>
02!s)
Li(s,
G2(s) =L2(s)
M2(s)
L2(s)
M2(s)
Y/s!
Yts)
Rys.6.5. Pojęcie układu otwartego i zamkniętego
Przed sformułowaniem kryterium Nyquista rozpatruje się
wstępnie równanie charakterystyczne dowolnego układu (zamknię-
tego lub otwartego), wykorzystując (6.31), zakładając występo-
wanie tylko pierwiastków jednokrotnych oraz podstawiając s=jw
<p(jw) = (ju-Sj) (ju-sz) ... (ju-sj = 0. (6.46)
W równaniu tym n jest stopniem równania charakterystycznego a
s są jego pierwiastkami.
Równanie (6.46) jest iloczynem liczb zespolonych, tym samym
n- TT l(J«-s.)l oraz arg £ arg(jw-s ). (6.47)
i
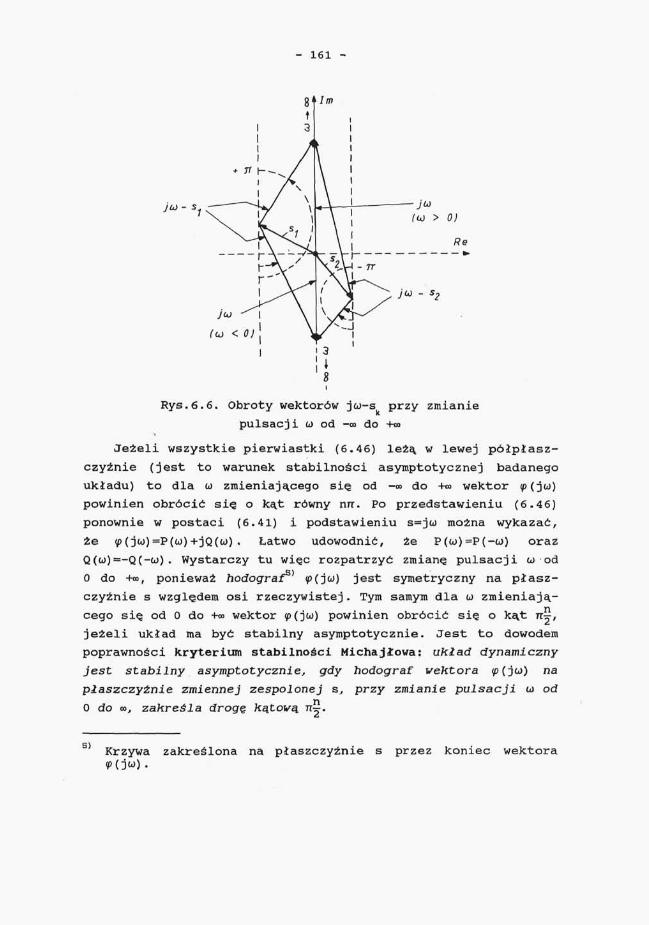
Na rys.6.6 przedstawiono poglądowo na płaszczyźnie zmiennejzespolonej s różnicę dwóch wektorów j(j i s , umieszczając przy-kładowo dwa pierwiastki w lewej i prawej półpłaszczyźnie. Jeże-li pulsacja u zmienia się od -co do +a> to wektor jw-s dokonujeobrotu o +71 dla pierwiastka s znajdującego się w lewej pół-
płaszczyźnie s
płaszczyźnie.i obrotu o -TT dla pierwiastka s w prawej pół-
- 161 -
Im
jej - s
(u < 01
Rys.6.6. Obroty wektorów jto-s przy zmianie
pulsacji w od -co do -h»
Jeżeli wszystkie pierwiastki (6.46) leżą w lewej półpłasz-
czyźnie (jest to warunek stabilności asymptotycznej badanego
układu) to dla w zmieniającego się od -« do +oo wektor p(jw)
powinien obrócić się o kąt równy mr. Po przedstawieniu (6.46)
ponownie w postaci (6.41) i podstawieniu s=ju można wykazać,
że <p (jw)=P(u) +jQ(w) . Łatwo udowodnić, że P((o)=P(-u) oraz
Q(w)=-Q(-a>) . Wystarczy tu więc rozpatrzyć zmianę pulsacji u od
0 do +oo, ponieważ hodografs) (p(jw) jest symetryczny na płasz-
czyźnie s względem osi rzeczywistej. Tym samym dla u zmieniają-
cego się od 0 do +» wektor p(jw) powinien obrócić się o kąt TT^,
jeżeli układ ma być stabilny asymptotycznie. Jest to dowodem
poprawności kryterium stabilności Michajłowa: układ dynamiczny
jest stabilny asymptotycznie, gdy hodograf weHtora p(jw) na
płaszczyźnie zmiennej zespolonej s, przy zmianie pulsacji ca od
0 do oo, zakreśla drogę kątową, n1—.
B) Krzywa zakreślona na płaszczyźnie s przez koniec wektora

- 162 -
Z braku miejsca kryterium to nie będzie w dalszym ciągu
ilustrowane przykładami.
Dla obydwu schematów na rys.6.5 mianownik transmitancji
Gz(s) układu zamkniętego jest równy l+GQ(s). Po podstawieniu
s=jw można napisać
(jw)L (jw)+M (ju)M (jw) ip (ju>)( 6 - 4 8 )
Tym samym zmianę argumentu funkcji l+GQ(jw) przedstawia się w
postaci
A arg [l+G (jw)] = A arg [ip (ju)] - A arg |>0(ju)]. (6.49)
Jeżeli układ otwarty jest stabilny asymptotycznie i ma po-
zostać tak samo stabilny po zamknięciu, to przyrost argumentu
1+G (ju) dla oswsco powinien być równy zeru, zgodnie z kryteriumG
Michajłowa, ponieważ wielomiany ¥>0(s) i ł>z(s) są tego samego
stopnia n. Warunek ten jest spełniony, gdy dla hodografu
1+G (jw) na płaszczyźnie s rozpoczynającego się na osi rzeczy-
wistej (w=0) i na niej kończącego (w=«), punkt (-l,jO) znajduje
się na zewnątrz hodografu.
Wykres G (ju) na płaszczyźnie zmiennej zespolonej s jest
charakterystyką amplitudowo-fazową układu otwartego- Jeżeli
charakterystyka ta dla O^wsm nie obejmuje punktu (-l,jO), to
punkt ten znajduje się na zewnątrz hodografu 1+G (ju) . Tym sa-
mym układ zamknięty jest stabilny asymptotycznie, jeżeli odpo-
wiadający mu układ otwarty jest również stabilny, a wykres
Go(jw) nie obejmuje punktu (-l,jO).
Kryterium Nyąuista dla tego przypadku można ująć następują-
co.
Jeżeli układ otvarty jest stabilny asymptotycznie, to pozo-
staje tak samo stabilny po zamknięciu, gdy charakterystyka
Go(jw) dla oswsm nie obejmuje punktu (-l,jO). Gdy charakterys-
tyka GQ(JCJ) przechodzi przez punkt (-l,jo), to układ zamknięty
jest na granicy stabilności (stabilny ale nie asymptotycznie).
Przykład 6.11
-ST
Zbadać stabilność układu, dla którego G (s)= ~ .
Po podstawieniu s=jw otrzymuje się po przekształceniach
- 163 -
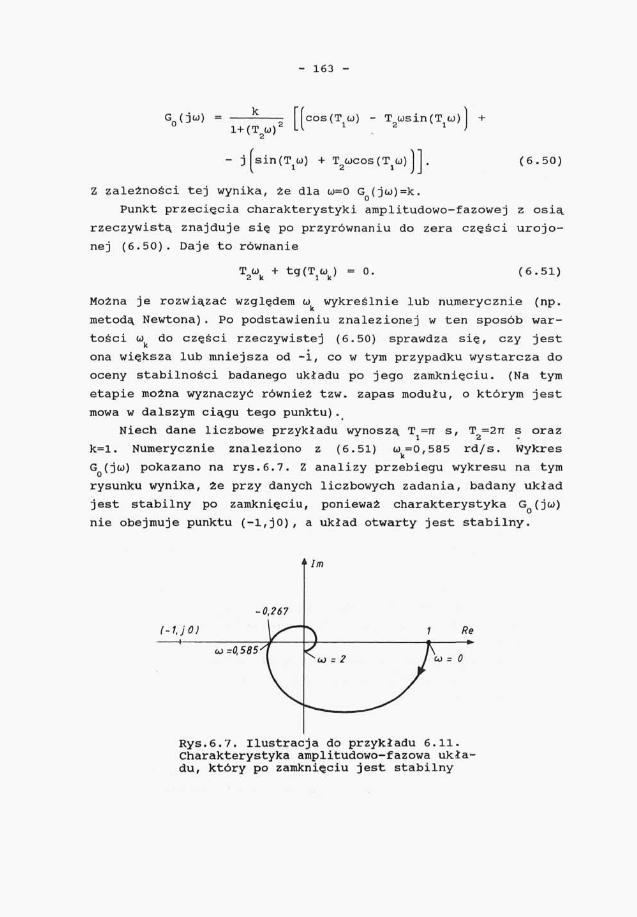
l+(TzU)'cos (Tu) - T wsin(T w) +
- j sin(Tu) + T wcos(T u) 11. (6.50)
Z zależności tej wynika, że dla w=0 G (ju)=k.
Punkt przecięcia charakterystyki amplitudowo-fazowej z osią
rzeczywistą znajduje się po przyrównaniu do zera części urojo-
nej (6.50). Daje to równanie
Tu + tq(T u ) = 0 .2 k ^ v 1 k'
(6.51)
Można je rozwiązać względem u wykreślnie lub numerycznie (np.
metodą Newtona). Po podstawieniu znalezionej w ten sposób war-
tości u^ do części rzeczywistej (6.50) sprawdza się, czy jest
ona większa lub mniejsza od -i, co w tym przypadku wystarcza do
oceny stabilności badanego układu po jego zamknięciu. (Na tym
etapie można wyznaczyć również tzw. zapas modułu, o którym jest
mowa w dalszym ciągu tego punktu)._
Niech dane liczbowe przykładu wynoszą T =n s, T 2=2TT S oraz
k=l. Numerycznie znaleziono z (6.51) w =0,585 rd/s. WykresG (Jw) pokazano na rys.6.7. Z analizy przebiegu wykresu na tym
rysunku wynika, 2e przy danych liczbowych zadania, badany układ
jest stabilny po zamknięciu, ponieważ charakterystyka G Q
nie obejmuje punktu (-l,jO), a układ otwarty jest stabilny.
* Im
Rys.6.7. Ilustracja do przykładu 6.11.Charakterystyka amplitudowo-fazowa ukła-du, który po zamknięciu jest stabilny

- 164 -
Jeżeli dla tych samych stałych: T^n s i T2=27T S przyjmie
się inną niż 1 wartość k, to początkiem charakterystyki GQ(ju)
będzie punkt k na osi Re, a punktem jej przecięcia z tą osią -
punkt -0,267k. Łatwo stąd wyznaczyć wartość graniczną kgr=3,75,
powyżej której badany układ po zamknięciu staje się niestabil-
ny.
Na rys.6.8 pokazano charakterystykę, którą dla tego samego
układu uzyskano dla k=2, 0̂ =4 s i T2=2 s. Tym razem układ po
zamknięciu będzie niestabilny, bo charakterystyka obejmuje
punkt (-1,jO).
kim
Re
Rys.6.8. Charakterystyka układu niestabil-nego po zamknięciu
Ważną zaletą kryterium Nyąuista, której nie mają inne kry-teria, jest łatwość określenia zapasu stabilności badanegoukładu.
W pobliżu granicy stabilności stany nieustalone są oscyla-cyjne o tym mniejszym tłumieniu, im bliżej tej granicy znajdujesię układ. Wynika stąd wymóg zapewnienia układowi odpowiedniegozapasu stabilności.
Operując pojęciami charakterystyk częstotliwościowych ukła-dów stabilnych, określa się dla nich dwie wielkości:- zapas modułuoraz
- zapas fazy.
Zapas modułu jest współczynnikiem a, przez jaki należy
przemnożyć wzmocnienie układu, przy nie zmienionym argumencie
transmitancji widmowej układu otwartego, aby doprowadzić układ
- 165 -
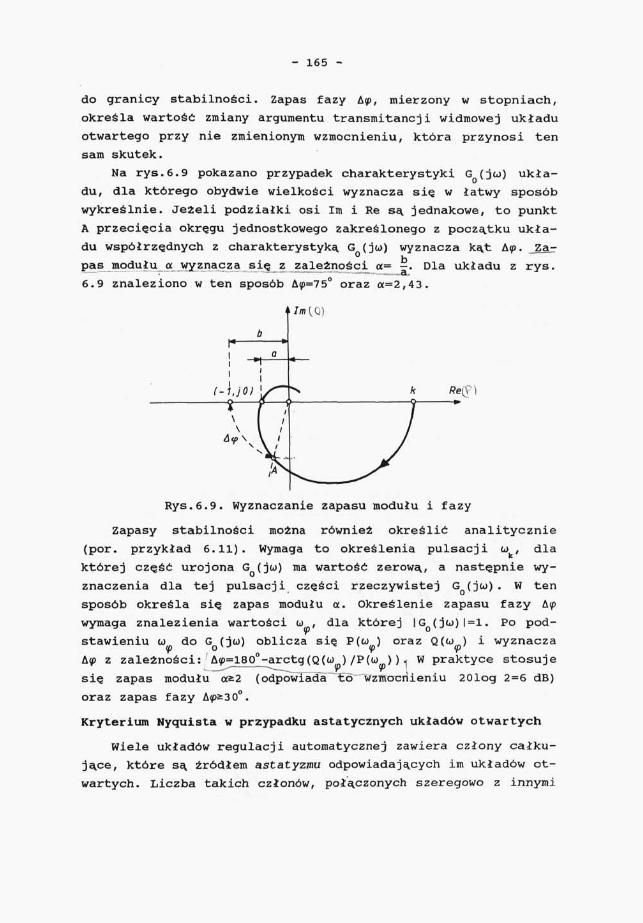
do granicy stabilności. Zapas fazy kip, mierzony w stopniach,określa wartość zmiany argumentu transmitancji widmowej układuotwartego przy nie zmienionym wzmocnieniu, która przynosi tensam skutek.
Na rys.6.9 pokazano przypadek charakterystyki G (ju) ukła-du, dla którego obydwie wielkości wyznacza się w łatwy sposóbwykreślnie. Jeżeli podziałki osi Im i Re są jednakowe, to punktA przecięcia okręgu jednostkowego zakreślonego z początku ukła-du współrzędnych z charakterystyką G (ju) wyznacza kąt A». Za-
bpas modułu a wyznacza się z zależności a= —. Dla układu z rys.' • II f\
6.9 znaleziono w ten sposób Ap=75° oraz a=2,43.
Rys.6.9. Wyznaczanie zapasu modułu i fazy
Zapasy stabilności można również określić analitycznie
(por. przykład 6.11). Wymaga to określenia pulsacji IÓ , dla
której część urojona G (ju) ma wartość zerową, a następnie wy-
znaczenia dla tej pulsacji części rzeczywistej G (jw). W tensposób określa się zapas modułu a. Określenie zapasu fazy hęwymaga znalezienia wartości w , dla której |Go(jcj)|=l. Po pod-stawieniu u do G (jw) oblicza się P(w ) oraz Q(<-O i wyznaczaAy z zależności: ' Ap=1800-arctg(Q(c<> )/P(u ))^ W praktyce stosujesię zapas modułu O<Ł2 (odpowiada "to~"wzmocnieniu 201og 2=6 dB)
oraz zapas fazy
Kryterium Nyquista w przypadku astatycznych układów otwartych
Wiele układów regulacji automatycznej zawiera człony całku-
jące, które są źródłem astatyzmu odpowiadających im układów ot-
wartych. Liczba takich członów, połączonych szeregowo z innymi

- 166 -
członami elementarnymi nie przekracza w praktyce dwóch. Rozpat-
ruje się więc zwykle tylko układy z jednym członem całkującym
(układy astatyczne pierwszego rzędu) i z dwoma takimi członami
(układy astatyczne drugiego rzędu).
Wykreślenie pełnej charakterystyki amplitudowo-fazowej
G (jw) dla OSŁfcsra w obydwu przypadkach jest utrudnione nieogra-
niczonym wzrostem modułu \G (ju)I dla pulsacji zbliżonej do ze-
ra. Nie jest to zresztą potrzebne, bo istotne dla badania sta-
bilności układu informacje zawarte są w tych fragmentach, które
przebiegają w okolicach punktu krytycznego (-l,jO) i kończą się
dla w=« - w początku układu współrzędnych.
Metoda Nyąuista badania stabilności układów, które po ot-
warciu sa astatyczne, jest podobna do omawianej już metody ba-
dania układów statycznych. Różnica polega tylko na tym, że cha-
rakterystykę amplitudowo-fazową astatycznego układu otwartego
uzupełnia się fragmentem umownego okręgu o nieskończenie dużym
promieniu, tak aby rozpoczynała się ona na dodatnim odcinku osi
Re. Metoda ta, której uzasadnienie teoretyczne jest podane
m.in. w pracach [2] i [7], zostanie zilustrowana prostym przy-
kładem.
Przykład £.12
Rozpatruje się otwarty układ astatyczny pierwszego rzędu o
transmitancji Gp(s>~s(T s+1) (/s+1) (T s+l) ' Jest to dość ogólny
1 2 3
przypadek członu całkującego połączonego szeregowo z trzema
członami inercyjnymi pierwszego rzędu, które łącznie odpowiada-
ją jednemu członowi inercyjnemu trzeciego rzędu. Przy zerowej
wartości jednej ze stałych czasowych otrzymuje się człon iner-
cyjny drugiego rzędu, a gdy tylko jedna stała różni się od zera
- pierwszego rzędu.
Po podstawieniu s=jw do GQ(s) i odpowiednich przekształce-
niach otrzymano
arg
Re
Im
c
G c
Go
( j
.(ju)
(jw)
to) ==
P(U)
= Q(w) . -k(lCt)
- arctg
"i
-</c)N '
2
oifau2
c- b )
( 6 .
( 6 .
( 6 .
52)
53)
54)

- 167 -
przy oznaczeniach: a=T T T : b=T +T +T ; c=T T +T T +T T oraz1 2 3 1 2 3 ' 1 2 1 3 2 3
N = (j2(awz-b)2 + ( i - w 2 c ) 2 . (6.55)
Po przyrównaniu Q(u) do zera znaleziono pulsację w , dlaktórej charakterystyka G (ju) przecina oś Re
1u =k
(6.56)
Jeżeli wartości tej odpowiada P(w)=-l, to układ otwarty pozamknięciu znajdzie się na granicy stabilności.
Po podstawieniu (6.56) do (6.52) i przyrównaniu do -1otrzymano graniczną wartość k=kk, dla której układ po zamknię-ciu przestaje być stabilny
\ = ^ - (6.57)
Z postaci wzorów (6.56) i (6.57) wynika, że obydwie wartoś-ci krytyczne: u i k zależą od wartości stałych T , T i T .
k K 1 2 3
Po przyjęciu k=l uzyskano przykładowy wykres fragmentu
charakterystyki układu otwartego dla T =1 s, T =2 s oraz T =3 s1 2 3
(rys.6.10a). Dla tych danych układ po zamknięciu będzie niesta-bilny, ponieważ punkt krytyczny -l,jo jest objęty przez charak-terystykę układu otwartego (uzupełnioną ćwierćokręgiem o nie-skończenie dużym promieniu). Wynik ten potwierdza uzyskana war-tość z (6.57) kk=0,4959, ponieważ k=l > kk=0,4959. Układ tenbędzie stabilny po zamknięciu jeżeli wzmocnienie k zostaniezmniejszone do wartości mniejszej od k̂ .
m
7
b)
s—•—<
ImT1 = 9,25
T2= 9,5
T3= 1
= 2
^ \
/
Re
I
1
Rys.6.10. Badanie stabilności układów otwartych z astatyzmempierwszego rzędu: a) układ, który po zamknięciu jest niestabil-
ny; b) układ, który po zamknięciu jest stabilny

- 168 -
Po zmianie wartości stałych na 1^=0,25, T2=0,5 oraz T3=luzyskano przebieg charakterystyki, która dla k=l nie obejmujejuż punktu krytycznego (rys.6.l0b), a więc dotyczy układu,który po zamknięciu będzie stabilny.
Ze wzorów (6.52), (6.53) oraz (6.55) wynika, że dla w—>+0P(u)—>-kb oraz Q(w)—»-«. Charakterystyka układu otwartego dlaw—H-0 zbliża się do półprostej leżącej w trzeciej ćwiartce,równoległej do osi Im i odległej od niej o kb.
W przykładzie 6.12 omówiono przypadek, w którym przy odpo-wiednim doborze parametrów można było uzyskać stabilność układuzamkniętego, mimo że układ otwarty był astatyczny. Istniejąjednakże układy, w których żadne zmiany parametrów nie zapew-niają stabilności. Na przykład, jeżeli układ otwarty jest sze-regowym połączeniem co najmniej dwóch członów całkujących orazczłonu inercyjnego dowolnego rzędu, to jego charakterystyka am-plitudowo-fazowa (uzupełniona odpowiednim fragmentem okręgu onieskończenie dużym promieniu) obejmuje punkt krytyczny przydowolnych (ale dodatnich) wartościach współczynnika wzmocnie-nia oraz stałych czasowych. Dla zapewnienia stabilności układujest w tym przypadku niezbędna zmiana jego struktury. Dlatego otakich układach mówi się, że są niestabilne strukturalnie.
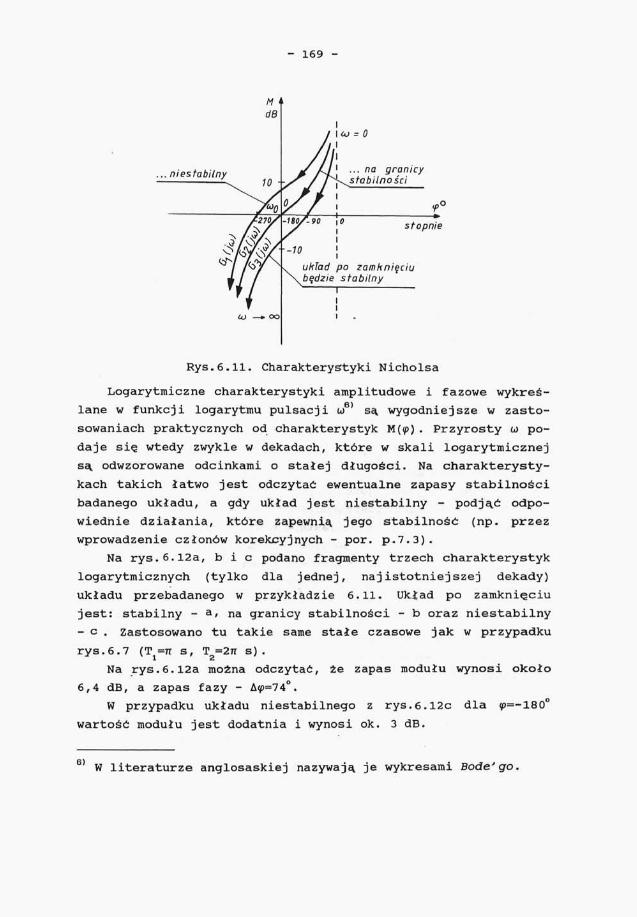
Logarytmiczne kryterium Nyquista
Po zastąpieniu modułu |G (ju) | transmitancji układu otwar-tego przez M=201og|Go(jw) I (w decybelach) i wykreśleniu zależ-ności M(*>), gdzie- ̂ =arg GQ(jo>), otrzymuje się logarytmicznącharakterystykę amplitudowo-fazową (Nicholsa) , na której odpo-wiednikiem punktu krytycznego (-l,jO) jest punkt (0 dB,-180°).Kryterium Nyquista można wtedy, z pewnym uproszczeniem, sformu-łować następująco:
Jeżeli punkt (0 dB,-180°) pozostaje stale po prawej stroniedla obserwatora przemieszczającego się wzdłuż amplitudowo--fazowej charakterystyki logarytmicznej układu otwartego, dlapulsacji u dążących od 0 do <*>, to układ po zamknięciu będziestabilny. Jeżeli punkt ten jest stale po stronie lewej, toukład jest niestabilny, a gdy charakterystyka przechodzi przezpunkt krytyczny, to układ jest na granicy stabilności.
Wszystkie te trzy przypadki ilustruje rys.6.11.
- 169 -
...na granicystabilności
Rys.6.11. Charakterystyki Nicholsa
Logarytmiczne charakterystyki amplitudowe i fazowe wykreś-lane w funkcji logarytmu pulsacji we) są wygodniejsze w zasto-sowaniach praktycznych od charakterystyk VL(<p) . Przyrosty u po-daje się wtedy zwykle w dekadach, które w skali logarytmicznejsą odwzorowane odcinkami o stałej długości. Na charakterysty-kach takich łatwo jest odczytać ewentualne zapasy stabilnościbadanego układu, a gdy układ jest niestabilny - podjąć odpo-wiednie działania, które zapewnią jego stabilność (np. przezwprowadzenie członów korekcyjnych - por. p.7.3).
Na rys.6.12a, b i c podano fragmenty trzech charakterystyklogarytmicznych (tylko dla jednej, najistotniejszej dekady)układu przebadanego w przykładzie 6.11. Ukiad po zamknięciujest: stabilny - a/ na granicy stabilności - b oraz niestabilny- c . Zastosowano tu takie same stałe czasowe jak w przypadkurys. 6.7 (T^TT S, T =2n s) .
Na rys.6.l2a można odczytać, że zapas modułu wynosi około6,4 dB, a zapas fazy - Ay=74°.
W przypadku układu niestabilnego z rys.6.12c dla ^=-180°wartość modułu jest dodatnia i wynosi ok. 3 dB.
6) W literaturze anglosaskiej nazywają je wykresami Bodę' go.

- 170 -
a)20
10
b) c)
-10
-20
dB
t = 2
-90"
-130c
-270c
dB
-270c
dB
Mlu)
0
-10
>)
ł . s
- 90
-270°
0,1 co, rad/s 1 0,1 1 0,1
Rys.6.12. Logarytmiczne charakterystyki amplitudowe i fazowe:a) układ po zamknięciu stabilny; b) układ na granicy stabilnoś-
ci; c) układ niestabilny
Na zakończenie tego przykładu warto zanotować ogólne spo-
strzeżenie:
Układ otwarty jest po zamknięciu stabilny, gdy:
dla <p(w)=-180° M((j)<0,
dla M(w)=0 dB °
Wykreślanie dokładnych charakterystyk logarytmicznych wyma-ga żmudnych obliczeń, jeżeli wykonuje się je na kalkulatorze.Stosowana jest więc powszechnie pewna uproszczona metoda, wktórej charakterystyki M(w) zastępuje się odcinkami linii pros-tych (asymptot przebiegów dokładnych), a przebiegi <p(u)) - szki-cuje wg pewnych punktów charakterystycznych dla poszczególnychczłonów. Sposób postępowania wyjaśniony już był w rozdziale 4.Przykłady różnych, rozwiązanych w ten sposób zadań, Czytelnikznajdzie w pracach [2], [5] i [7]. Obecnie znacznie dokładnieji szybciej rozwiązuje się takie zadania przy użyciu komputera.W rozdziale 7 zamieszczono opis programu LOG4, który jest mię-dzy innymi przeznaczony do tych celów.
Bibliografia
1. Gibson J.E.: Nieliniowe układy sterowania automatycznego.(INT, Warszawa 1968.
2. Kaczorek T. : Teoria układów regulacji automatycznej. CzęśćII, zeszyt 2. WPW, Warszawa 1974.

- 171 -
Mazurek J., Vogt H. , Żydanowicz W.: Podstawy automatyki.WPW, Warszawa 1983.
P.A. ( p e a . ) : MeToflw wcc/ieaoBaHMfl He/iMHeŃHbixaBTOMaTMHecKoro ynpaB/ieHMfl. Itofl. HayKa, MocKBa 1 9 7 5 .
5. Pełczewski W.: Teoria sterowania. WNT, Warszawa 1980.
6. Thaler G.J., Pastel M.P.: Nieliniowe układy automatycznegosterowania. WNT, Warszawa 1965.
7. Żelazny M.: Podstawy automatyki. PWN, Warszawa 1967.













![Program Strzelań z Broni Strzeleckiej DD 7.0.2 (z Poprawkami Nr 1 i Nr 2)[767]](https://static.fdocuments.pl/doc/165x107/55cf905d550346703ba5368c/program-strzelan-z-broni-strzeleckiej-dd-702-z-poprawkami-nr-1-i-nr-2767.jpg)



