8. Geodezyjne opracowanie projektu trasy drogowejgeozsb-brzozow.cba.pl/files/luki.pdf · Projekt...
25
8. Geodezyjne opracowanie projektu trasy drogowej 8.1.Ogólne informacje o podziale i klasyfikacji dróg kołowych Na podstawie ustawy o drogach publicznych z 21.03.1985 r /Dz.U. z 1985r, Nr 14,poz.60 i Dz.U. z 2000r.Nr71,poz.838 – tekst jednolity/ wprowadzono obowiązujący w Polsce podział dróg publicznych. Drogi publiczne ze względu na funkcje w sieci drogowej dzielą się na następujące kategorie: 1. drogi krajowe, 2. drogi wojewódzkie, 3. drogi powiatowe, 4. drogi gminne. Ulice leżące w ciągu dróg wyżej wymienionych należą do tej samej kategorii co te drogi. Drogi publiczne ze względów funkcjonalno-technicznych dzielą się na klasy określone w warunkach technicznych, jakim powinny odpowiadać drogi i ich usytuowanie /Dz.U. z 1999r. Nr 43,poz.430/. Drogi krajowe stanowią własność Skarbu Państwa. Pozostałe drogi stanowią własność właściwego samorządu. Drogi publiczne ze względu na stopień dostępności i obsługi przyległego terenu dzielą się na: 1. drogi ogólnodostępne, 2. drogi ekspresowe, 3. autostrady. Do dróg krajowych zalicza się: 1. autostrady i drogi ekspresowe oraz drogi leżące w ich ciągach do czasu wybudowania autostrad i dróg ekspresowych, 2. drogi międzynarodowe, 3. drogi stanowiące inne połączenia zapewniające spójność dróg krajowych, 4. drogi dojazdowe do ogólnodostępnych przejść granicznych obsługujących ruch osobowy i towarowy bez ograniczeń ciężaru całkowitego pojazdów, 5. drogi alternatywne do autostrad płatnych, 6. drogi stanowiące ciągi obwodnicowe dużych aglomeracji miejskich, 7. drogi o znaczeniu obronnym. Do dróg wojewódzki ch zalicza się drogi stanowiące połączenia między miastami, mające znaczenie dla województwa, i drogi o znaczeniu obronnym nie zaliczone do dróg krajowych.
-
Upload
truongtram -
Category
Documents
-
view
249 -
download
0
Transcript of 8. Geodezyjne opracowanie projektu trasy drogowejgeozsb-brzozow.cba.pl/files/luki.pdf · Projekt...
8. Geodezyjne opracowanie projektu trasy drogowej
8.1.Ogólne informacje o podziale i klasyfikacji dróg kołowych
Na podstawie ustawy o drogach publicznych z 21.03.1985 r /Dz.U. z 1985r, Nr
14,poz.60 i Dz.U. z 2000r.Nr71,poz.838 – tekst jednolity/ wprowadzono
obowiązujący w Polsce podział dróg publicznych.
Drogi publiczne ze względu na funkcje w sieci drogowej dzielą się na
następujące kategorie:
1. drogi krajowe,
2. drogi wojewódzkie,
3. drogi powiatowe,
4. drogi gminne.
Ulice leżące w ciągu dróg wyżej wymienionych należą do tej samej kategorii co te
drogi.
Drogi publiczne ze względów funkcjonalno-technicznych dzielą się na klasy
określone w warunkach technicznych, jakim powinny odpowiadać drogi i ich
usytuowanie /Dz.U. z 1999r. Nr 43,poz.430/.
Drogi krajowe stanowią własność Skarbu Państwa. Pozostałe drogi stanowią
własność właściwego samorządu.
Drogi publiczne ze względu na stopień dostępności i obsługi przyległego terenu
dzielą się na:
1. drogi ogólnodostępne,
2. drogi ekspresowe,
3. autostrady.
Do dróg krajowych zalicza się:
1. autostrady i drogi ekspresowe oraz drogi leżące w ich ciągach do czasu
wybudowania autostrad i dróg ekspresowych,
2. drogi międzynarodowe,
3. drogi stanowiące inne połączenia zapewniające spójność dróg krajowych,
4. drogi dojazdowe do ogólnodostępnych przejść granicznych obsługujących ruch
osobowy i towarowy bez ograniczeń ciężaru całkowitego pojazdów,
5. drogi alternatywne do autostrad płatnych,
6. drogi stanowiące ciągi obwodnicowe dużych aglomeracji miejskich,
7. drogi o znaczeniu obronnym.
Do d r ó g w o j e w ó d z k i c h zalicza się drogi stanowiące połączenia między
miastami, mające znaczenie dla województwa, i drogi o znaczeniu obronnym nie
zaliczone do dróg krajowych.
Do d r ó g p o w i a t o w y c h zalicza się drogi stanowiące połączenie miast
będących siedzibami powiatów z siedzibami gmin i siedzib gmin między sobą.
Do d r ó g g m i n n y c h zalicza się drogi o znaczeniu lokalnym nie zaliczone do
innych kategorii, stanowiące uzupełniającą sieć dróg służących miejscowym
potrzebom, z wyłączeniem dróg wewnętrznych.
Drogi nie zaliczone do żadnej kategorii dróg publicznych, w szczególności drogi w
osiedlach mieszkaniowych, dojazdowe do gruntów rolnych i leśnych, dojazdowe do
obiektów użytkowanych przez podmioty prowadzące działalność gospodarczą, place
przed dworcami kolejowymi, autobusowymi i portami są d r o g a m i
w e w n ę t r z n y m i .
Organ administracji rządowej lub jednostki samorządu terytorialnego, do
właściwości którego należą sprawy z zakresu planowania, budowy, modernizacji,
utrzymania i ochrony dróg, jest zarządcą drogi.
Zarządcami dróg są:
- dla dróg krajowych – Generalny Dyrektor Dróg Krajowych i Autostrad,
- dla dróg wojewódzkich – zarząd województwa,
- dla dróg powiatowych – zarząd powiatu,
- dla dróg gminnych – wójt /burmistrz, prezydent miasta/.
- dla dróg w granicach miasta na prawach powiatu zarządcą wszystkich dróg
publicznych,
z wyjątkiem autostrad i dróg ekspresowych jest prezydent miasta.
- w granicach miasta stołecznego Warszawy zarządcą dróg publicznych /z wyjątkiem
autostrad i dróg ekspresowych/ jest prezydent m.st.Warszawy.
Podstawowe pojęcia i określenia stosowane w trasach drogowych
1. d r o g a lub p a s d r o g o w y – wydzielony pas terenu, przeznaczony do ruchu
lub postoju pojazdów oraz do ruchu pieszych, wraz z leżącymi w jego ciągu
obiektami inżynierskimi, placami, zatokami postojowymi oraz znajdującymi się
w wydzielonym pasie terenu chodnikami, ścieżkami rowerowymi, drogami
zbiorczymi, drzewami i krzewami oraz urządzeniami technicznymi związanymi z
prowadzeniem i zabezpieczeniem ruchu,
2. u l i c a – jest to droga na terenach zabudowy miast i wsi, łącznie z torowiskiem
pojazdów szynowych komunikacji miejskiej, wydzieloną liniami
rozgraniczającymi, która jest przeznaczona do obsługi bezpośredniego
otoczenia oraz umieszczania urządzeń technicznych nie związanych z ruchem
pojazdów i pieszych,
3 . j e z d n i a - to część drogi przeznaczona do ruchu pojazdów,
4 . k o r o n a d r o g i - oznacza jezdnię z poboczami, zatokami autobusowymi, a
przy drogach dwujezdniowych – również z pasami awaryjnego postoju i pasem
dzielącym jezdnie,
5 . d r o g a e k s p r e s o w a – to droga przeznaczona wyłącznie do ruchu pojazdów
samochodowych i nie obsługująca przyległego terenu:
a) wyposażona w jedną lub dwie jezdnie,
b ) posiadająca wielopoziomowe skrzyżowania z przecinającymi ją innymi
drogami komunikacji, z dopuszczeniem wyjątkowo jednopoziomowych
skrzyżowań z drogami publicznymi,
c ) wyposażona w urządzenia obsługi podróżnych, pojazdów i przesyłek,
przeznaczone wyłącznie dla użytkowników drogi,
6. a u t o s t r a d a - droga wyłącznie dla ruch pojazdów samochodowych i nie
obsługująca przyległego terenu:
a) wyposażona przynajmniej w dwie trwale rozdzielone jednokierunkowe
jezdnie,
b) posiadająca wielopoziomowe skrzyżowania ze wszystkimi
przecinającymi
ją drogami komunikacji,
d) wyposażona w urządzenia obsługi podróżnych, pojazdów i przesyłek
przeznaczone wyłącznie dla użytkowników autostrady,
7. o b i e k t m o s t o w y – to most, wiadukt, estakada, tunel, kładka dla
pieszych,
przejście podziemne i przepust,
8. b u d o w a d r o g i – wykonanie nowego połączenia drogowego między
określonymi miejscami lub miejscowościami,
9. m o d e r n i z a c j a d r o g i – to wykonywanie robót, w których wyniku na
stępuje podwyższenie parametrów technicznych i eksploatacyjnych
istniejącej drogi,
10. u t r z y m a n i e d r o g i – to wykonywanie robót remontowych,
przywracających jej pierwotny stan, oraz robót konserwacyjnych,
porządkowych i innych zmierzających do zwiększenia bezpieczeństwa i
wygody ruch, w tym także odśnieżanie i zwalczanie śliskości zimowej,
11. o c h r o n a d r o g i – to działanie mające na celu niedopuszczenie do
przedwczesnego zniszczenia drogi oraz niewłaściwego jej użytkowania.
8.2. Zasady opracowania trasy drogowej
Projekt trasy drogowej jest wykonywany przez specjalistów z zakresu
budownictwa drogowego z uwzględnieniem wszystkich czynników, które mają wpływ
na kształt i rodzaj drogi. Projektanci, wykonując opracowanie układu geometrycznego
trasy drogowej, wykorzystują aktualne mapy sytuacyjno-wysokościowe, na które
wrysowują podstawowe elementy trasy: odcinki prostoliniowe i krzywoliniowe. Odcinki
krzywoliniowe stanowią najczęściej fragmenty pojedynczych łuków kołowych, łuki
koszowe, klotoidy, biklotoidy, krzywe esowe, serpentyny i inne krzywe stosowane w
zależności od sytuacji terenowej i parametrów dynamicznych ruchu pojazdów
mających w przyszłości poruszać się po drodze.
Opracowanie projektu wykonuje się zarówno w płaszczyźnie poziomej jak i
pionowej, nadając projektowanej trasie optymalny kształt ułożenia osi drogi. Czynność
ta nosi nazwę projektowania niwelety drogi i jest wykonywana na podstawie
aktualnego profilu podłużnego terenu, przewidzianego pod budowę drogi. Prawidłowo
zaprojektowana niweleta drogi winna mieć zachowane wszystkie parametry
techniczne przewidziane odpowiednimi normami branżowymi, aby zapewnić
bezpieczeństwo ruchu przyszłych użytkowników i prawidłową eksploatację
wybudowanej drogi.
Po opracowaniu wszystkich niezbędnych założeń projektowych i ustaleniu
koncepcji przebiegu trasy na mapie sytuacyjno-wysokościowej można przystąpić do
geodezyjnego opracowania projektu trasy drogowej. Prace z tym związane dzieli się na
kilka etapów, których efekty końcowe stanowią podstawę wykonywania dalszych
czynności inwestycyjnych.
Pierwszą czynnością geodezyjną jest wyznaczenie w terenie położenia punktu
początkowego i końcowego projektowanego odcinka trasy oraz położenie wszystkich
punktów załamań głównych kierunków trasy, tzw. punktów wierzchołkowych.
Następnie wykonuje się pomiar terenowy długości poszczególnych odcinków kierunków
głównych trasy oraz pomiar kątów na punktach załamań trasy, tzw. kątów zwrotu
stycznych.
Dysponując tymi wielkościami oraz parametrami poszczególnych krzywych
takimi jak: promień krzywizny, parametr klotoidy itp., można przystąpić do
szczegółowego opracowania geodezyjnego poszczególnych krzywych bądź ich
zespołów. Opracowanie to polega na obliczeniu niezbędnych miar kątowych i linowych
pozwalających na wyznaczenie w terenie charakterystycznych punktów projektowanej
trasy oraz na sporządzeniu odpowiednich szkiców dokumentacyjnych.
Kolejnym etapem opracowania projektu trasy jest wyznaczenie kilometrażu
wszystkich punktów trasy oraz określenie niezbędnych miar do realizacji obiektów
towarzyszących takich jak: przepusty, wiadukty, przejazdy kolejowe i inne.
Po wykonaniu opracowania w płaszczyźnie poziomej przystępuje się do
opracowania wysokościowego trasy, polegającego na wykonaniu projektu niwelety
wraz z obliczeniem łuków pionowych oraz wykonaniu przekrojów poprzecznych
projektowanej trasy będących między innymi podstawą do późniejszego obliczenia
objętości robót ziemnych.
Tak opracowany projekt trasy drogowej zostaje zrealizowany w terenie etapami
w trakcie budowy kolejnych odcinków drogi.
8.3 Opracowanie projektu w płaszczyźnie poziomej
8.3.1 Łuk kołowy
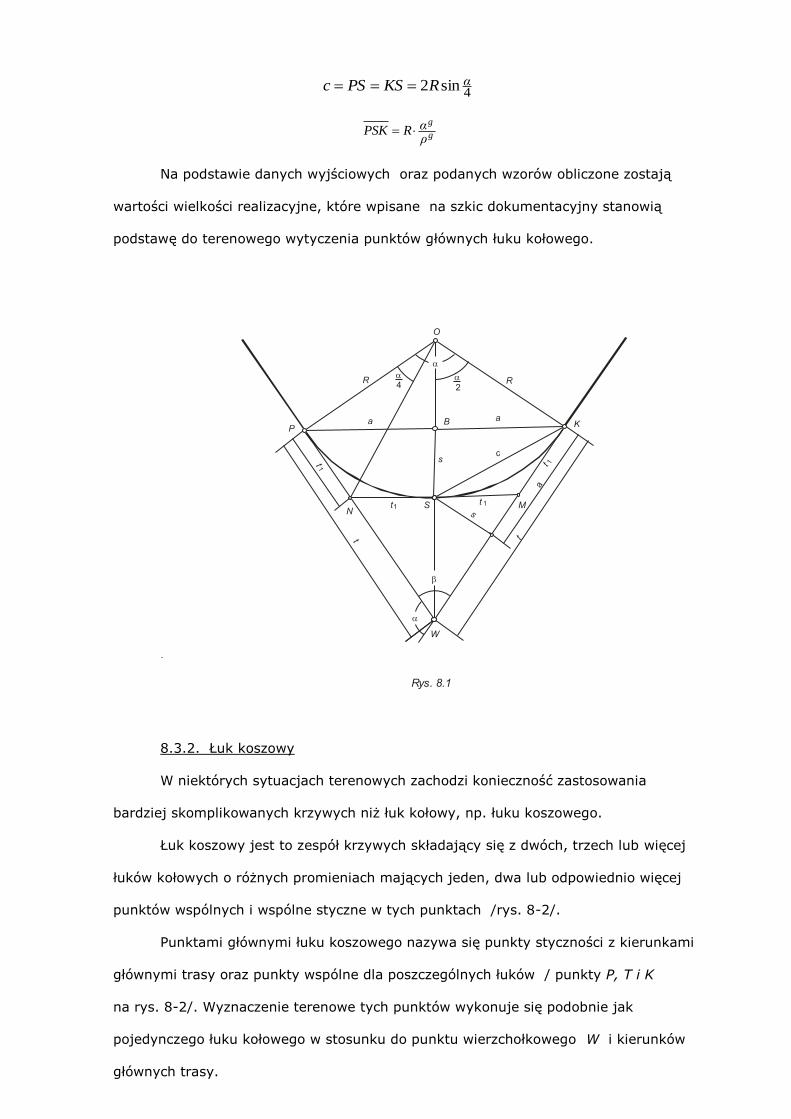
Punktami głównymi łuku kołowego nazywa się punkty styczności łuku z
prostymi głównymi trasy – P i K , oraz punkt środkowy łuku – S /rys. 8 -1/.
Wyznaczenie terenowe tych punktów może być wykonane poprzez odłożenie
odpowiednich miar kątowych i linowych od punktu wierzchołkowego i kierunków
głównych trasy. Punkt początkowy P i końcowy K zostanie wyznaczony w wyniku
odłożenia stycznej głównej t od punktu wierzchołkowego wzdłuż kierunków głównych
trasy. Punkt środkowy S można wyznaczyć kilkoma sposobami, jednakże w celu
kontroli prawidłowości wyznaczenia, należy stosować zasadę wyznaczenia tego punktu
co najmniej dwoma sposobami. Wartości wielkości niezbędnych do wyznaczenia
punktów głównych określa się za pomocą wzorów:
2tg
RWKPWt
12
sec1
2cos
1
2COS
RRR
RRWOWS
2
cos1 αRBSs
4tg1
αRt
4sin2 αRKSPSc
g
g
ραRPSK
Na podstawie danych wyjściowych oraz podanych wzorów obliczone zostają
wartości wielkości realizacyjne, które wpisane na szkic dokumentacyjny stanowią
podstawę do terenowego wytyczenia punktów głównych łuku kołowego.
s
a
tt
O
W
KB
S MN
aa
s
RR
P
c
2
4
t1 t 1
t1 t 1
Rys. 8.1
8.3.2. Łuk koszowy
W niektórych sytuacjach terenowych zachodzi konieczność zastosowania
bardziej skomplikowanych krzywych niż łuk kołowy, np. łuku koszowego.
Łuk koszowy jest to zespół krzywych składający się z dwóch, trzech lub więcej
łuków kołowych o różnych promieniach mających jeden, dwa lub odpowiednio więcej
punktów wspólnych i wspólne styczne w tych punktach /rys. 8-2/.
Punktami głównymi łuku koszowego nazywa się punkty styczności z kierunkami
głównymi trasy oraz punkty wspólne dla poszczególnych łuków / punkty P, T i K
na rys. 8-2/. Wyznaczenie terenowe tych punktów wykonuje się podobnie jak
pojedynczego łuku kołowego w stosunku do punktu wierzchołkowego W i kierunków
głównych trasy.

W łuku koszowym podwójnym /rys. 8-2/ występuje siedem elementów,
których znajomość jest konieczna do wytyczenia łuku w terenie. Są to: promienie R1
i R2, styczne t1 i t2 oraz kąty 1 i 2.
Na podstawie znanych twierdzeń geometrycznych można napisać tylko trzy
równania pozwalające określić trzy elementy. Pozostałe cztery elementy musza być
znane z założeń projektowych. Zgodnie z rysunkiem 8.2 można napisać np.:
W
T
N1N2
W 1
W2
M2
K
P
S1S2
O1
O2
R2
R 1
t 1t2
t’2 t ’ 1
M1
Rys. 8.2
221112
221112
21
coscossin
sinsincos
αRRβRβtR
αRRβRβtt
ααα
Z równania trzeciego można wyznaczyć wartość kąta
21
2112
cossincos
RR
RβRβtα
.
Podstawiając do równania drugiego 2 wyznacza się wartość stycznej t2 ,
natomiast wartość kąta 1 należy obliczyć z równania pierwszego:
1=- 2
Dysponując obliczonymi wielkościami, wyznaczenie pozostałych elementów
liniowych do wytyczenia łuku koszowego wykonuje się tak jak w przypadku
pojedynczego łuku kołowego.
8.3.3. Klotoida jako krzywa przejściowa
Pojazd poruszający się po prostej podlega działaniu dwóch sił: siły ciężkości,
skierowanej pionowo i sile pociągowej, skierowanej wzdłuż kierunku jazdy. Podczas
jazdy na łuku na pojazd działa jeszcze siła odśrodkowa, której wielkość wyraża wzór:
R
vmS
2 lub KvmS 2
gdzie: m – masa pojazdu,
v – prędkość pojazdu,
R – promień łuku po którym porusza się pojazd,
K – krzywizna łuku przy czym R
K1
.
Przyjmując, że krzywizna prostej K= 0 , to siła odśrodkowa na prostej też ma
wartość równą S = 0. Przy wjeździe pojazdu na łuk pojawia się nagle siła
odśrodkowa, której wartość zależy od promienia łuku i prędkości pojazdu. Przy małych
promieniach łuków lub dużych prędkościach, wielkość siły odśrodkowej może być tak
duża, że pojazd zostanie „wypchnięty” z obranej trasy ruchu, co zawsze stwarza
zagrożenie wypadku.
Aby temu zjawisku fizycznemu zapobiec, między prostą a łukiem kołowym
projektuje się odcinek tzw. krzywej przejściowej. Krzywa ta ma zmienny promień, od
R= przy styku z prostą /K = 0/ do wartości R równej wielkości promienia łuku
kołowego /R
K1
/. W związku z powyższym i siła odśrodkowa będzie narastać
stopniowo wraz ze wzrostem krzywizny, od zera na końcu prostej do wielkości S na
łuku kołowym.
Z wielu różnych krzywych matematycznych zapewniających warunek ciągłości
zmiany krzywizny, jako krzywa przejściowa najczęściej jest stosowana klotoida
/rys.8-3/. Klotoida charakteryzuje się m.in. własnością, że przyrost jej krzywizny jest
proporcjonalny do przyrostu długości. Zależność powyższą można zapisać równaniem
naturalnym klotoidy:
L= a2K lub LR = a2 = const.
gdzie: L – długość łuku mierzona od punktu stałego do rozpatrywanego punktu na

krzywej,
K - krzywizna w rozpatrywanym punkcie,
R – promień łuku ,
a2 – współczynnik proporcjonalności.
XS
TD
X
T
H
SY
R
U R
TK
Y
N
X
Rys. 8.3
Dla każdego dowolnego punktu P na klotoidzie zachodzą zależności
matematyczne wiążące podstawowe elementy klotoidy: L, R, a i - kąt zwrotu
stycznej klotoidy według wzorów:
22
222 L
RRLa ,
222
aRR
aL ,
22
2 La
L
aR ,
2
2
2
2
222 a
L
R
a
R
L .
W praktyce geodezyjnej często stosuje się określanie kłotoidy poprzez podanie
współrzędnych prostokątnych punktu P /rys.8.3/:

8
9
4
5
345640 a
L
a
LLX
10
11
6
7
2
3
422403366 a
L
a
L
a
LY
W praktyce w większości przypadków wystarczy uwzględnić tylko 1 lub 2 pierwsze
wyrazy z szeregu.
W projektowaniu tras najczęściej stosuje się klotoidę jako krzywą przejściową
między prostą a łukiem kołowym, przy czym jeżeli w takim zespole krzywych
parametry obu klotoid są takie same to jest to układ symetryczny lub jeżeli parametry
są różne, układ niesymetryczny.
8.3.4. Łuk kołowy z krzywymi przejściowymi
Zaprojektowanie zespołu krzywych złożonego z dwóch odcinków klotoid i łuku
kołowego /rys. 8.4/ jest możliwe tylko wtedy, gdy kąt zwrotu stycznych 2.
O
M
X
YTT
D
HXS
PB
P
RR
O
H X S
M
TK
YN
T’
W’
z’
Z
S
T0
TS
W
Rys. 8.4
Z rysunku widać, że rozpatrując kąty w punkcie S otrzymuje się zależność
=2+
gdzie: - jest kątem środkowym łuku kołowego.

Punkty główne klotoidy są to punkty styczności z prostą z jednej strony i z
łukiem kołowym z drugiej. Wyznaczenie ich w terenie jest wykonywane, podobnie jak
dla łuku kołowego, na podstawie znajomości położenia punktu wierzchołkowego oraz
kierunków głównych trasy. Odpowiednie wielkości liniowe i kątowe konieczne do ich
wyznaczenia określa się na podstawie następujących wzorów /rys. 8.4/:
)12
(sec
)12
(sec
cos
sin
ctg
tg
cos
cos1
sin
...3366
...40
2
222
0
6
7
2
3
4
5
2
2
2
2
RZ
HHRZ
XTT
YN
YT
YXT
YXT
RYHRY
RYH
RXX
a
L
a
LY
a
LLX
a
L
R
L
R
a
SS
K
D
S
S
Należy nadmienić, że podane wzory znajdują zastosowanie tylko do zespołu
krzywych w którym klotoidy mają taki sam parametr, czyli do klotoid symetrycznych.
Z wzorów ogólnych wynika, że dla określonej dopuszczalnej prędkości na danej
trasie siła odśrodkowa jest tym większa, im mniejszy jest promień R łuku, na który
pojazd wjeżdża z odcinka prostego. Z tego względu przy wjeździe na łuk o promieniu
mniejszym, potrzebny jest dłuższy odcinek L krzywej przejściowej, aby siła
odśrodkowa S wprowadzana była wolniej. Dla każdego promienia R można określić
minimalną długość L krzywej przejściowej zależnie od dopuszczalnej prędkości v, i
następnie z równania L R = a2, znając w nim dwie wartości, określić trzecią, czyli
parametr a klotoidy. Uogólniając można stwierdzić, że im większy promień R, tym
mniejsza siła odśrodkowa i tym krótszą krzywą przejściową można stosować, a dla
bardzo dużych promieni nawet zupełnie ją pominąć.
Stosowanie krzywej przejściowej nie jest wymagane przy następujących
promieniach łuków poziomych:
1. dla dróg I i II klasy – gdy R 4 500 m,
2. dla dróg III, IV i V klasy – gdy R 1 500 m dla v 60 km/h,
R 3 000 m dla v 60 km/h.
W projektowaniu tras drogowych najczęściej stosuje się klotoidę jako krzywą
przejściową między prostą a łukiem kołowym, przy czym z obu stron łuku kołowego
można zastosować równe odcinki klotoidy, otrzymując układ symetryczny trasy lub
nierówne klotoidy dające układ niesymetryczny. Znajdują również zastosowanie dwa
symetryczne lub niesymetryczne łuki klotoidy, bez wstawki łuku kołowego między
nimi. Taki zespół krzywych nazywa się biklotoidą symetryczną bądź niesymetryczną.
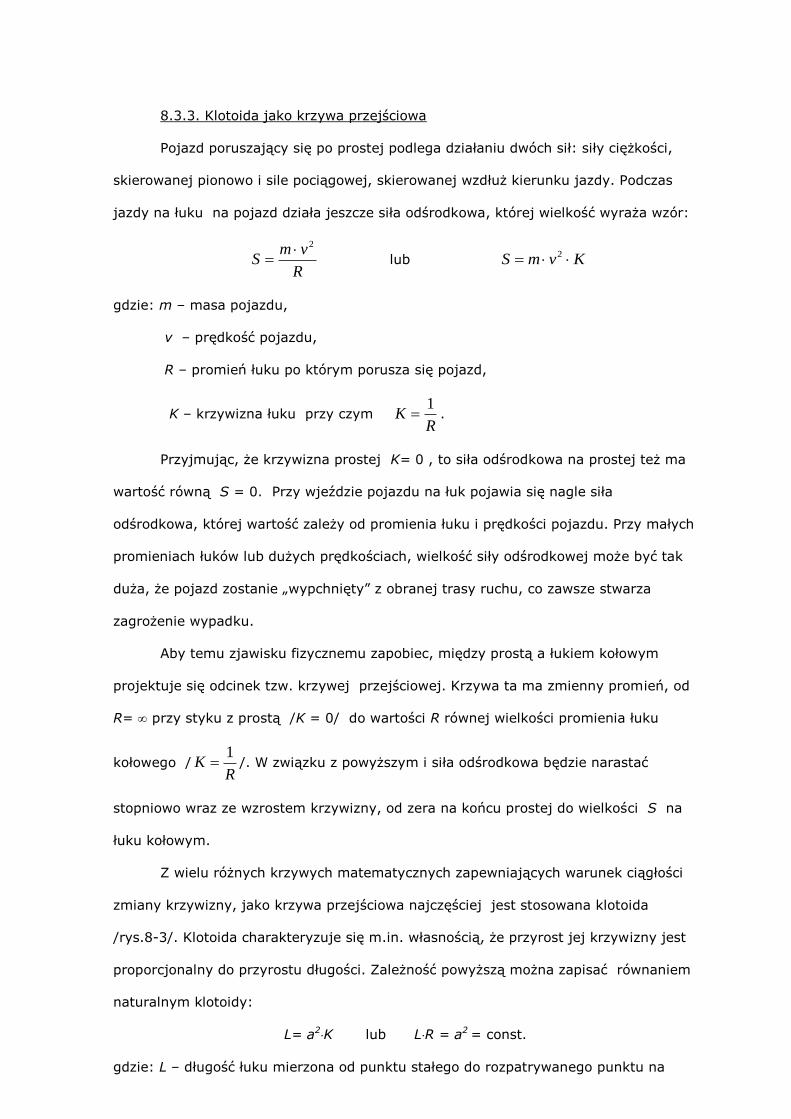
Klotoidę można stosować również jako połączenie dwóch łuków kołowych o równych
lub różnych promieniach otrzymując tzw. krzywą owalną /rys. 8.5/ lub krzywą esową
/ rys.8.6/ .
R1 R 2
a1
a2
Rys. 8.6
R 1
R 2
R 3
a1a2
Rys. 8.5
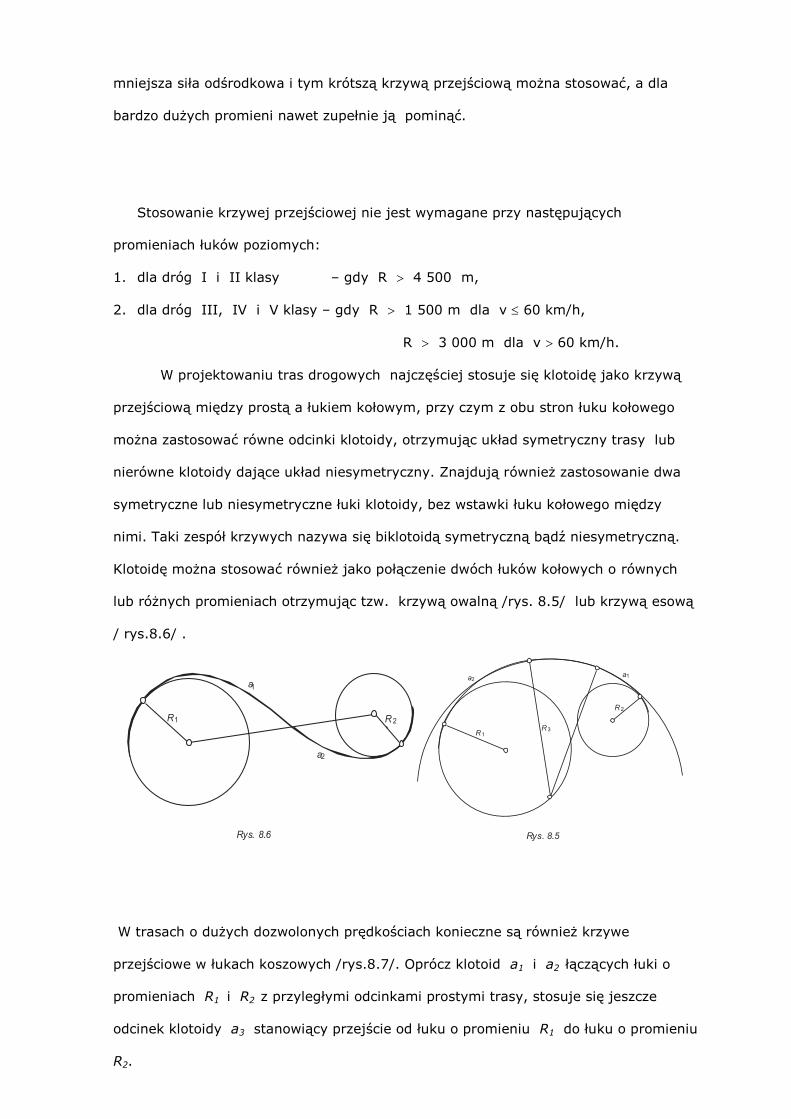
W trasach o dużych dozwolonych prędkościach konieczne są również krzywe
przejściowe w łukach koszowych /rys.8.7/. Oprócz klotoid a1 i a2 łączących łuki o
promieniach R1 i R2 z przyległymi odcinkami prostymi trasy, stosuje się jeszcze
odcinek klotoidy a3 stanowiący przejście od łuku o promieniu R1 do łuku o promieniu
R2.
klotoida a3koł
o
klot
oida
a2
koło
kloto
ida a1
R2
R 1 S1
S2
Rys. 8.7
8.3.5. Wyznaczenie kilometrażu trasy
Dla celów projektowych, realizacyjnych i eksploatacyjnych, każda trasa
drogowa ma określone położenie charakterystycznych punktów poprzez podanie ich
odległości od punktu umownie przyjętego za początkowy czyli poprzez wyznaczenie
tzw. kilometrażu trasy. Na podstawie podstawowych elementów liniowych trasy,
wyznacza się jej długość a następnie dzieli się ją na odcinki o długości 1 kilometra,
uzyskując punkty kilometrowe. Punkty te zaznaczane są na projekcie trasy a po jej
zrealizowaniu, zastabilizowane w terenie na poboczu drogi co 1 km, za pomocą
specjalnych znaków tzw. słupków kilometrowych. Punkty te mają istotne znaczenie w
budowie trasy i jej przyszłej eksploatacji, dając możliwość jednoznaczego
lokalizowania sytuacyjnego elementów trasy i jej obiektów towarzyszących jak mosty,
wiadukty, przepusty, skrzyżowania itp.
Poszczególne odcinki kilometrowe podzielone są dodatkowo na 10 równych
części dając odcinki o długości 100 m, czyli odcinki hektometrowe. Punkty
hektometrowe, podobnie jak kilometrowe zaznaczane są na projekcie oraz
stabilizowane w terenie znakiem z odpowiednim opisem danego kilometra i
hektometra. Dla celów projektowych stosuje się zagęszczenie hektometrażu, poprzez
podzielenie danego odcinka 100 m na krótsze części równe 10m, 20m lub 25m w
zależności od wielkości promienia, uzyskując tzw. pikietaż trasy.
8.3.7.Wyznaczenie punktów pośrednich trasy
Wyznaczenie w terenie punktów głównych łuku kołowego bądź innej krzywej
najczęściej nie wystarcza do prawidłowego wykonania budowy nawierzchni drogi. W
celu dokładniejszego zrealizowania w terenie zaprojektowanego kształtu łuku należy
dodatkowo wyznaczyć tzw. punkty pośrednie pomiędzy początkiem i końcem łuku.
Punkty pośrednie wyznacza się w punktach pikietażu trasy, stosując różne metody
znane w geodezji z których kilka zostanie przedstawionych poniżej.
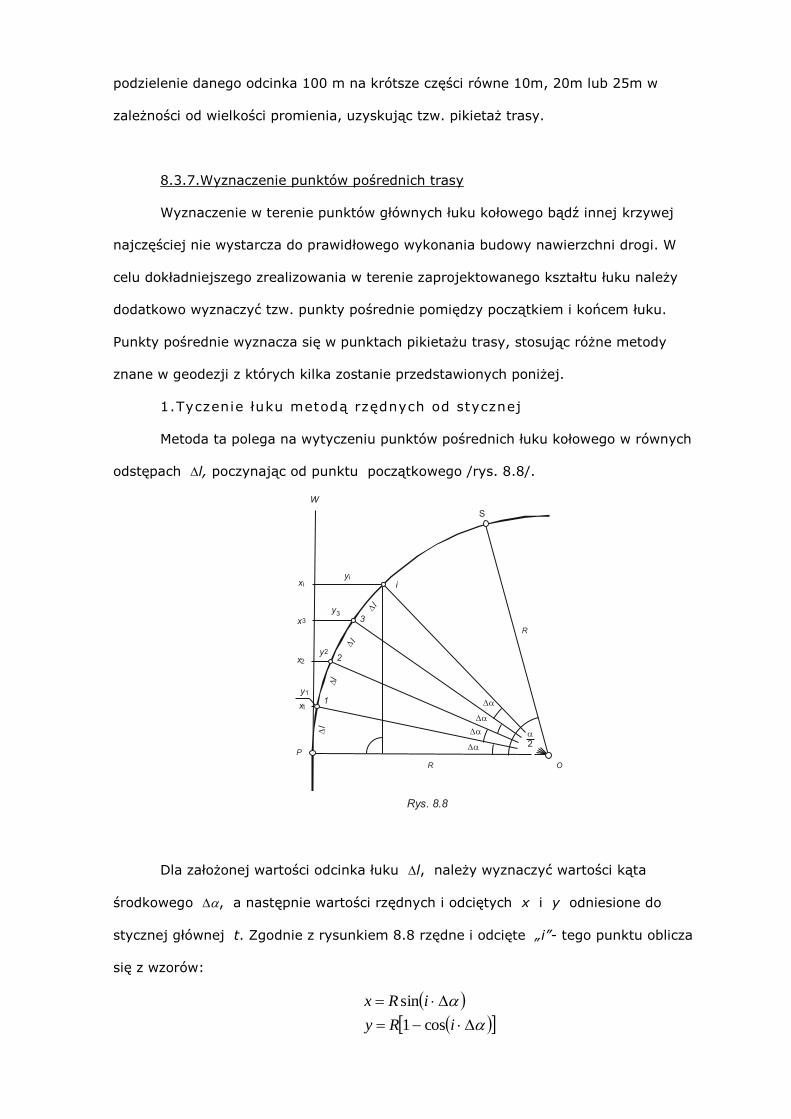
1.Tyczenie łuku metodą rzędnych od stycznej
Metoda ta polega na wytyczeniu punktów pośrednich łuku kołowego w równych
odstępach l, poczynając od punktu początkowego /rys. 8.8/.
i
3
2
1
P
R
R O
W
l
l
l
l
x1
x3
xi
yi
y3
y2
y1
2
S
x2
Rys. 8.8
Dla założonej wartości odcinka łuku l, należy wyznaczyć wartości kąta
środkowego , a następnie wartości rzędnych i odciętych x i y odniesione do
stycznej głównej t. Zgodnie z rysunkiem 8.8 rzędne i odcięte „i”- tego punktu oblicza
się z wzorów:
iRy
iRx
cos1
sin

gdzie: R – promień łuku, gg
R
l
.
Druga wersja tej metody sprowadza się do wyznaczenia położenia punktów
pośrednich na łuku kołowym, przy założeniu tyczenia równych odcinków na stycznej,
czyli znajomości wielkości x dla poszczególnych punktów.
Wartości y oblicza się z wzoru
22 xRRy
lub z wzoru przybliżonego
R
xy
2
2
gdzie: x – założona wartość odcinka na stycznej,
R – promień łuku.
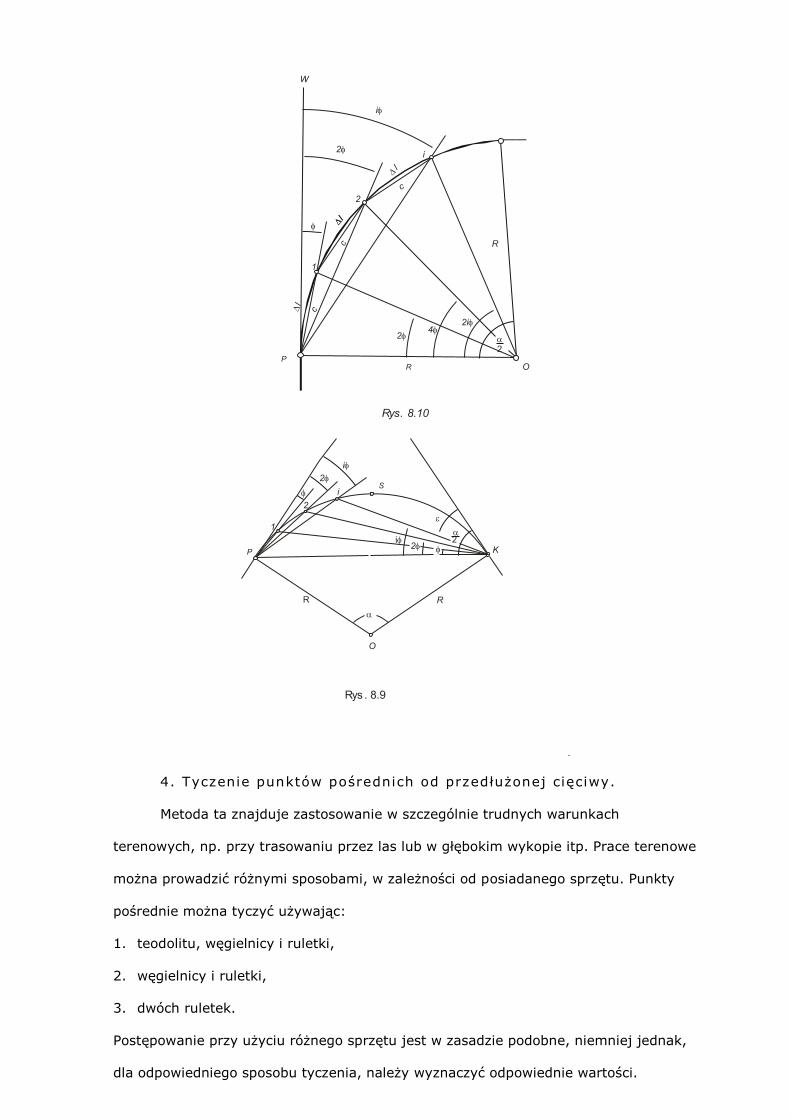
2. Tyczenie punktów pośrednich metodą rzędnych od cięciwy.
Sposób ten, często stosowany w praktyce, polega na wytyczeniu punktów
pośrednich łuku kołowego w równych odstępach, metodą rzędnych od cięciwy /rys.
8.9/.
O
R R
S
PK
1
s
a
xi
yi
x’i
y’i
i
a
Rys . 8.9
W celu wytyczenia punktu „i”, na cięciwie TK odkłada się wartość xi a na
prostopadłej wartość yi . Wielkości te wyznacza się pośrednio na podstawie uprzednio
obliczonych wartości a i s oraz x’ i y’. Te ostatnie wyznacza się identycznie jak przy
tyczeniu punktów pośrednich metodą rzędnych od stycznej dla równych odcinków na
łuku. Szukane wartości wyznacza się z wzorów:

ysy
xax
iRy
iRx
Rs
Ra
i
i
)cos(1
sin
)2
cos1(
2sin
3.Tyczenie punktów pośrednich metodą biegunową.
Metoda ta jest często stosowana, ponieważ można nią łatwo tyczyć punkty w
dowolnie obranych odstępach a powszechność stosowania tachimetrów
elektronicznych pozwala na zachowanie dużej dokładności, zwłaszcza odkładania
wielkości liniowych.
Wytyczenie punktów pośrednich sprowadza się do obliczenia wartości kąta i
odległości d /rys.8.10/, które oblicza się z wzorów:
sin2
sin2
2
2
Rc
iRd
R
l
R
l
i
Miarą kontrolną jest wielkość cięciwy c.
W metodzie tej stanowisko instrumentu /biegun/ może być obrane na punktach
głównych łuku P, S, K lub na punkcie wierzchołkowym W.
Jeżeli warunki terenowe uniemożliwiają pomiary liniowe, bądź nie dysponuje
się tachimetrem, to poszczególne punkty łuku można wyznaczyć jako przecięcia pary
kierunków zrealizowanych dwoma teodolitami ustawionymi na punktach P i K
/rys.8.11/. Kąty wcinające i mogą być odkładane od kierunku stycznej głównej np.
PW i od cięciwy KP lub tylko od stycznych głównych czy też tylko od cięciwy poprzez
realizację kąta i którego wartość obliczona zostaje z zależności
ii
2
gdzie:
R
l
2.
i
2
P
R
R O
W
2
1
24
2i
2
i
Rys. 8.10
l
l
l
l
c
c
c
O
R R
S
2i
i
2
P K
2
i
2
1
Rys . 8.9
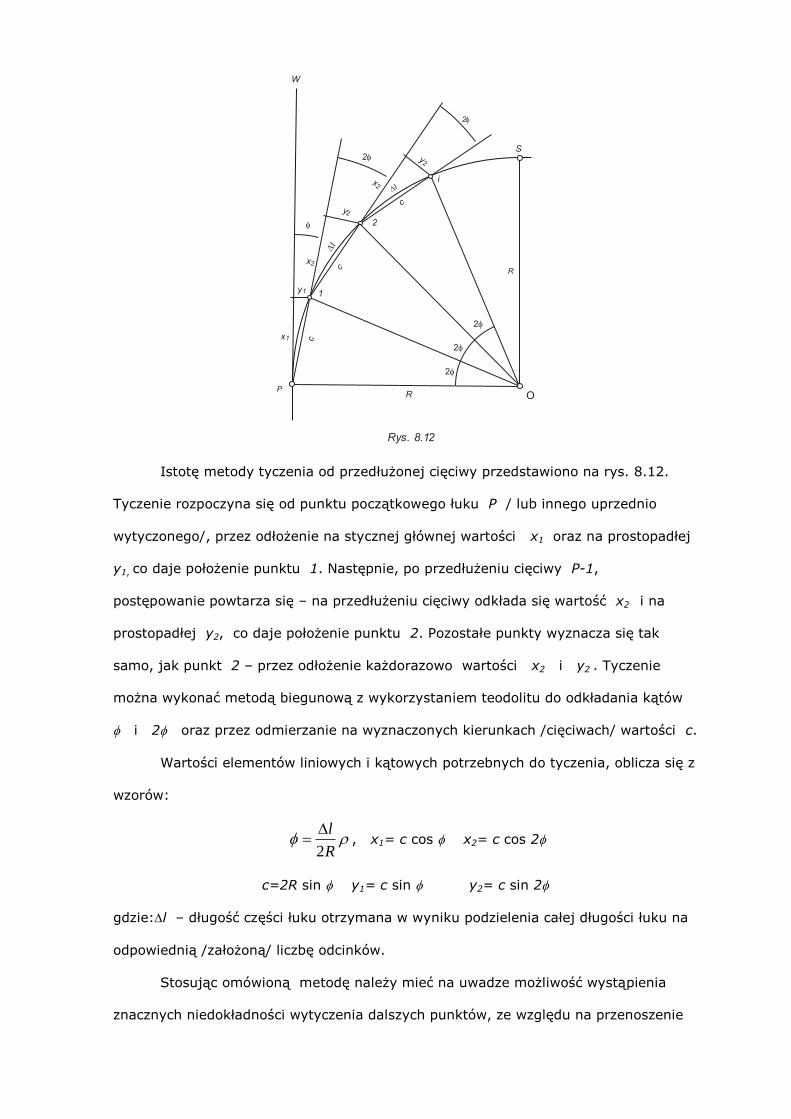
4. Tyczenie punktów pośrednich od przedłużonej cięciwy.
Metoda ta znajduje zastosowanie w szczególnie trudnych warunkach
terenowych, np. przy trasowaniu przez las lub w głębokim wykopie itp. Prace terenowe
można prowadzić różnymi sposobami, w zależności od posiadanego sprzętu. Punkty
pośrednie można tyczyć używając:
1. teodolitu, węgielnicy i ruletki,
2. węgielnicy i ruletki,
3. dwóch ruletek.
Postępowanie przy użyciu różnego sprzętu jest w zasadzie podobne, niemniej jednak,
dla odpowiedniego sposobu tyczenia, należy wyznaczyć odpowiednie wartości.
i
2
1
P
R
R O
W
S
c
c
c
y1
x1
y2
x2
2
2
2
2
2
l
l
y2
x2
Rys. 8.12
Istotę metody tyczenia od przedłużonej cięciwy przedstawiono na rys. 8.12.
Tyczenie rozpoczyna się od punktu początkowego łuku P / lub innego uprzednio
wytyczonego/, przez odłożenie na stycznej głównej wartości x1 oraz na prostopadłej
y1, co daje położenie punktu 1. Następnie, po przedłużeniu cięciwy P-1,
postępowanie powtarza się – na przedłużeniu cięciwy odkłada się wartość x2 i na
prostopadłej y2, co daje położenie punktu 2. Pozostałe punkty wyznacza się tak
samo, jak punkt 2 – przez odłożenie każdorazowo wartości x2 i y2 . Tyczenie
można wykonać metodą biegunową z wykorzystaniem teodolitu do odkładania kątów
i 2 oraz przez odmierzanie na wyznaczonych kierunkach /cięciwach/ wartości c.
Wartości elementów liniowych i kątowych potrzebnych do tyczenia, oblicza się z
wzorów:
R
l
2
, x1= c cos x2= c cos 2
c=2R sin y1= c sin y2= c sin 2
gdzie:l – długość części łuku otrzymana w wyniku podzielenia całej długości łuku na
odpowiednią /założoną/ liczbę odcinków.
Stosując omówioną metodę należy mieć na uwadze możliwość wystąpienia
znacznych niedokładności wytyczenia dalszych punktów, ze względu na przenoszenie

się błędów wytyczenia punktu poprzedniego na punkty następne. Błędne wytyczenie
np. punktu drugiego powoduje błędne wytyczenie wszystkich punktów następnych.
5 . T y c z e n i e p u n k t ó w p o ś r e d n i c h k l o t o i d y .
Punkty pośrednie klotoidy można tyczyć takimi samymi metodami jak punkty
łuku kołowego. Do najczęściej stosowanych należą metody: rzędnych od stycznej i
biegunowa.
Istotę metody rzędnych od stycznej ilustruje rys. 8.13. Dla danego parametru a i
załżonej długości łuku klotoidy l wyznacza się wartości x i y do tyczonych punktów
według wzorów:
ii
ii
i
i
yaY
xaX
liliy
lilix
...3366
...40
73
5
gdzie: xi i yi - wartości odniesione do klotoidy jednostkowej o parametrze a=1,
Xi i Yi - wartości realizacyjne klotoidy o parametrze a.
Chcąc wytyczyć punkty pośrednie metodą biegunową, należy obliczyć miary
realizacyjne do poszczególnych punktów /rys. 8.13/ na podstawie wzorów:
22
tg.
ii
i
i
YXd
X
Yarc
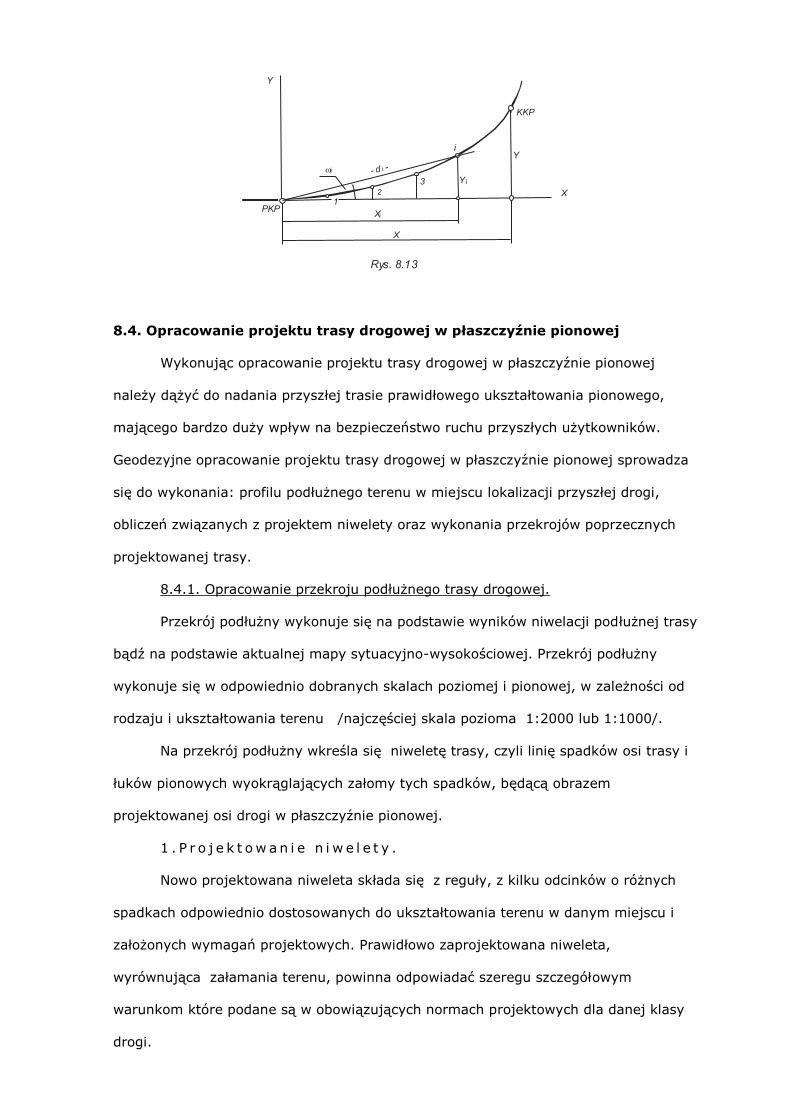
1
Y
X
KKP
PKP
i
32
Y
X
Y i
Xi
- d -ii
Rys. 8.13
8.4. Opracowanie projektu trasy drogowej w płaszczyźnie pionowej
Wykonując opracowanie projektu trasy drogowej w płaszczyźnie pionowej
należy dążyć do nadania przyszłej trasie prawidłowego ukształtowania pionowego,
mającego bardzo duży wpływ na bezpieczeństwo ruchu przyszłych użytkowników.
Geodezyjne opracowanie projektu trasy drogowej w płaszczyźnie pionowej sprowadza
się do wykonania: profilu podłużnego terenu w miejscu lokalizacji przyszłej drogi,
obliczeń związanych z projektem niwelety oraz wykonania przekrojów poprzecznych
projektowanej trasy.
8.4.1. Opracowanie przekroju podłużnego trasy drogowej.
Przekrój podłużny wykonuje się na podstawie wyników niwelacji podłużnej trasy
bądź na podstawie aktualnej mapy sytuacyjno-wysokościowej. Przekrój podłużny
wykonuje się w odpowiednio dobranych skalach poziomej i pionowej, w zależności od
rodzaju i ukształtowania terenu /najczęściej skala pozioma 1:2000 lub 1:1000/.
Na przekrój podłużny wkreśla się niweletę trasy, czyli linię spadków osi trasy i
łuków pionowych wyokrąglających załomy tych spadków, będącą obrazem
projektowanej osi drogi w płaszczyźnie pionowej.
1 . P r o j e k t o w a n i e n i w e l e t y .
Nowo projektowana niweleta składa się z reguły, z kilku odcinków o różnych
spadkach odpowiednio dostosowanych do ukształtowania terenu w danym miejscu i
założonych wymagań projektowych. Prawidłowo zaprojektowana niweleta,
wyrównująca załamania terenu, powinna odpowiadać szeregu szczegółowym
warunkom które podane są w obowiązujących normach projektowych dla danej klasy
drogi.
Najistotniejsze to:
1. niweleta musi przechodzić przez założoną wysokość punktu początkowego i
końcowego trasy oraz przez podane wysokości obowiązkowych punktów
pośrednich,
2. spadki niwelety nie mogą przekraczać spadków maksymalnych, ustalonych przez
odpowiednie instrukcje dla danego rodzaju trasy,
3. roboty ziemne, wynikające z ustalenia danej niwelety, powinny być jak
najmniejsze,
4. objętości nasypów i wykopów winny być zrównoważone.
Tak zaprojektowana niweleta będzie miała załomy, wynikające z zastosowania
różnych spadków. Przy wystąpieniu znacznych różnic między spadkami dwóch
kolejnych odcinków niwelety /ponad 1%/, załamania te winny być złagodzone poprzez
zastosowanie wyokrąglających łuków pionowych. Jako łuki pionowe najczęściej
stosowane są łuki kołowe lub symetryczne odcinki parabol.
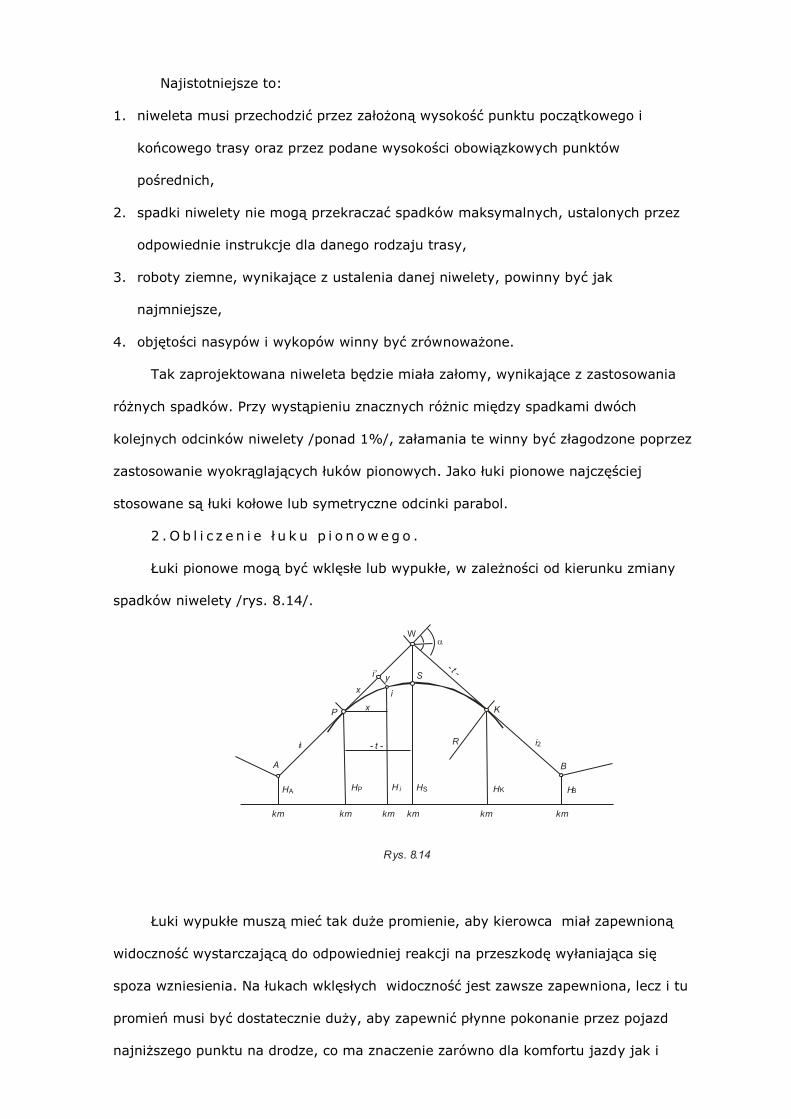
2 . O b l i c z e n i e ł u k u p i o n o w e g o .
Łuki pionowe mogą być wklęsłe lub wypukłe, w zależności od kierunku zmiany
spadków niwelety /rys. 8.14/.
W
- t -
x
y
xP K
S
A B
HA HBHP HS HKH i
i
i’
- t -
km km km km km km
i1 i2
Rys. 8.14
R
Łuki wypukłe muszą mieć tak duże promienie, aby kierowca miał zapewnioną
widoczność wystarczającą do odpowiedniej reakcji na przeszkodę wyłaniająca się
spoza wzniesienia. Na łukach wklęsłych widoczność jest zawsze zapewniona, lecz i tu
promień musi być dostatecznie duży, aby zapewnić płynne pokonanie przez pojazd
najniższego punktu na drodze, co ma znaczenie zarówno dla komfortu jazdy jak i
bezpieczeństwa ruchu. Wielkości promieni łuków pionowych określone są w
odpowiednich instrukcjach i dla dane klasy drogi wynoszą od kilku do kilkunastu
tysięcy metrów.
Wytyczenie łuku pionowego, podobnie jaki i łuku poziomego, polega na
wyznaczeniu w terenie punktów głównych i pośrednich łuku, zarówno sytuacyjnym jak
i wysokościowym.
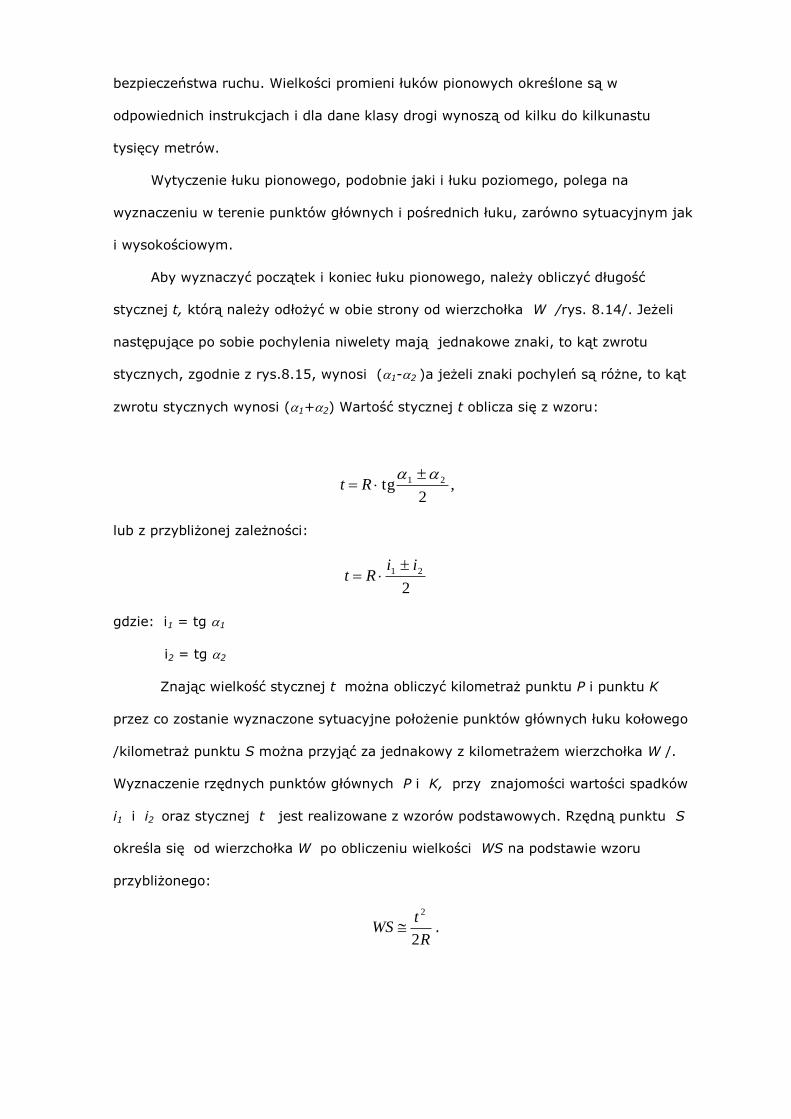
Aby wyznaczyć początek i koniec łuku pionowego, należy obliczyć długość
stycznej t, którą należy odłożyć w obie strony od wierzchołka W /rys. 8.14/. Jeżeli
następujące po sobie pochylenia niwelety mają jednakowe znaki, to kąt zwrotu
stycznych, zgodnie z rys.8.15, wynosi (1-2 )a jeżeli znaki pochyleń są różne, to kąt
zwrotu stycznych wynosi (1+2) Wartość stycznej t oblicza się z wzoru:
,2
tg 21 Rt
lub z przybliżonej zależności:
2
21 iiRt
gdzie: i1 = tg 1
i2 = tg 2
Znając wielkość stycznej t można obliczyć kilometraż punktu P i punktu K
przez co zostanie wyznaczone sytuacyjne położenie punktów głównych łuku kołowego
/kilometraż punktu S można przyjąć za jednakowy z kilometrażem wierzchołka W /.
Wyznaczenie rzędnych punktów głównych P i K, przy znajomości wartości spadków
i1 i i2 oraz stycznej t jest realizowane z wzorów podstawowych. Rzędną punktu S
określa się od wierzchołka W po obliczeniu wielkości WS na podstawie wzoru
przybliżonego:
R
tWS
2
2
.
i1
i2
2W
Si1
i2
W
S
poziompoziom
Rys. 8.15
2
Obliczenie punktów pośrednich sprowadza się do wyznaczenia rzędnych
punktów na stycznych w ustalonym interwale kilometrażu / rys. 8.14 – punkt i’ / a
następnie odjęciu lub dodaniu – w zależności od rodzaju łuku, wielkości y obliczonej z
wzoru:
R
xy
2
2
.
Obliczone rzędne punktów głównych i pośrednich zostają wpisane na przekrój
podłużny trasy stanowiąc dane realizacyjne do wyznaczenia łuku pionowego
wyokrąglającego załom niwelety.
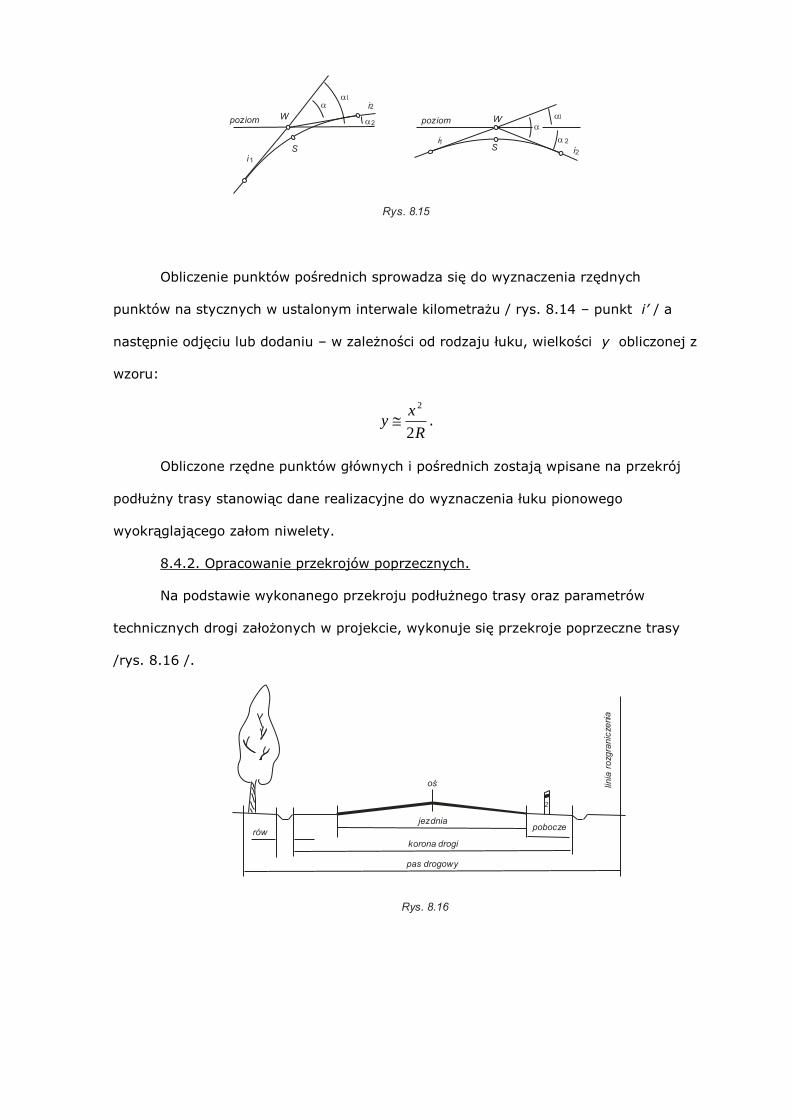
8.4.2. Opracowanie przekrojów poprzecznych.
Na podstawie wykonanego przekroju podłużnego trasy oraz parametrów
technicznych drogi założonych w projekcie, wykonuje się przekroje poprzeczne trasy
/rys. 8.16 /.
jezdniapobocze
rów
pas drogowy
korona drogi
oś linia
rozg
ranic
zeni
a
Rys. 8.16
2
Przekroje poprzeczne wykonuje się zazwyczaj w jednej skali /najczęściej
1:100/, podając podstawowe dane dotyczące drogi, takie jak: rzędne niwelety i
terenu, szerokość jezdni, korony drogi i pasa drogowego, głębokości rowów,
pochylenia poprzeczne jezdni, pochylenia skarp i inne. Przekroje poprzeczne wykonuje
się we wszystkich charakterystycznych miejscach trasy, takich jak: punkty styczności
prostych i odcinków krzywoliniowych, punkty załamań niwelety, punkty hektometrowe,
punkty zmiany szerokości korony drogi, na skrzyżowaniach z innymi drogami i
kolejami, w rejonie wiaduktów i mostów itp.
Przekroje poprzeczne stanowią podstawę do wykonania obliczenia objętości
robót ziemnych, a w czasie budowy drogi do prawidłowego ukształtowania jej
nawierzchni.
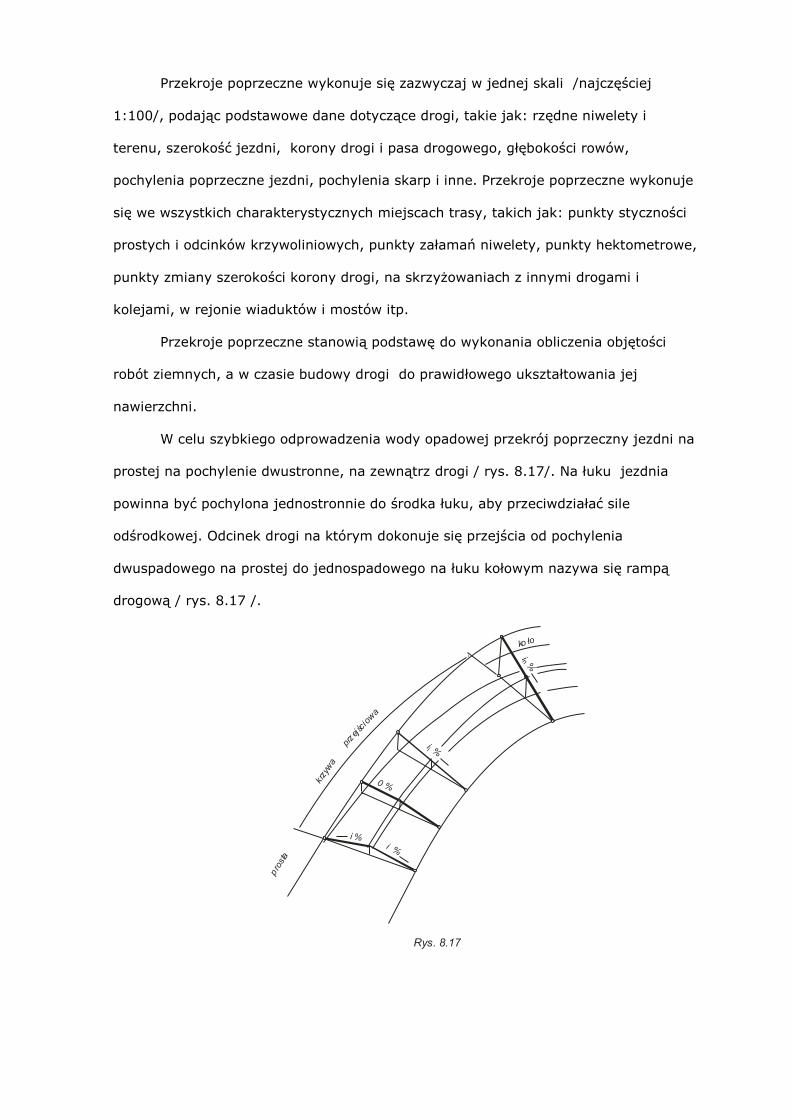
W celu szybkiego odprowadzenia wody opadowej przekrój poprzeczny jezdni na
prostej na pochylenie dwustronne, na zewnątrz drogi / rys. 8.17/. Na łuku jezdnia
powinna być pochylona jednostronnie do środka łuku, aby przeciwdziałać sile
odśrodkowej. Odcinek drogi na którym dokonuje się przejścia od pochylenia
dwuspadowego na prostej do jednospadowego na łuku kołowym nazywa się rampą
drogową / rys. 8.17 /.
krzy
wa
przejściowa
ko ło
i %
i %i
i %n
i %
0 %
pro
sta
Rys. 8.17
Rampę drogową stosuje się zazwyczaj na długości krzywej przejściowej
stopniowo podwyższając rzędną zewnętrznej krawędzi jezdni, aż do uzyskania
jednospadowego pochylenia na początku łuku. Na trasach gdzie nie stosuje się
krzywej przejściowej, rampa drogowa projektowana jest na odcinku prostej
poprzedzającym łuk kołowy.
Należy zaznaczyć, że prawidłowo zaprojektowana rampa drogowa daje
możliwość prawidłowego ułożenia nawierzchni drogi, co ma bardzo istotne znaczenie
dla bezpieczeństwa ruch drogowego na krzywoliniowym odcinku trasy. Źle
zaprojektowana rampa drogowa a tym samym źle ułożona nawierzchnia drogi, stwarza
bezpośrednie zagrożenie wypadkiem, gdyż pojazd jadący ze znaczną prędkością nie
zachowa swojego kierunku jazdy, lecz zjedzie na pas ruchu dla pojazdów jadących z
przeciwka co prawie zawsze prowadzi do katastrofy.
Szczegółowe opracowanie poszczególnych zagadnień związanych z tyczeniem
tras drogowych, czytelnik znajdzie w podręcznikach z zakresu geodezji inżynieryjnej
m.in. w ( GEODEZJI INŻYNIERYJNEJ 1993 ).