1. Analiza chodu człowieka...kinematyki chodu człowieka może znaleźć zastosowanie w...
10
1 Magdalena Żuk Materiały do laboratorium w ramach kursu Mechatronika w Medycynie Temat: Analiza chodu człowieka z zastosowaniem optycznego systemu śledzenia ruchu 1. Analiza chodu człowieka Chód jako podstawowy i naturalny sposób przemieszczania się człowieka jest jedną z najbardziej złożonych czynności ruchowych wykonywanych w życiu codziennym. Analiza chodu jest przedmiotem zainteresowania klinicystów, gdyż lepsze zrozumienie mechanizmów lokomocji pozwala na skuteczniejszą diagnostykę i terapię. Ocena wizualna chodu, będącego złożeniem ruchów segmentów ciała w przestrzeni trójwymiarowej, jest trudna, a diagnoza funkcjonalna powinna być oparta na badaniach obiektywnych. Rozwój metod pomiarowych pozwala na Ilościowy, trójpłaszczyznowy opis kinematyki chodu człowieka. Chód to cykliczna aktywność ruchowa polegająca na powtarzaniu się wzorców koordynacyjnych kończyn dolnych oraz towarzyszących im współruchów kończyn górnych, tułowia oraz głowy. Charakterystyczny dla człowieka, dwunożny chód, Kapandji zdefiniował jako cykl kontrolowanych i zatrzymywanych w porę upadków [1], co jest konsekwencją wybitnie niestabilnej pionowej postawy ciała. Powtarzalność czasowa cechująca chód nazywa się cyklem chodu. Cykl chodu obejmuje czynności i ruchy wykonywane przez idącego pomiędzy kontaktem pięty z podłożem kończyny a powtórnym jej zetknięciem [2,3]. Ilościowy opis kinematyki chodu człowieka obejmuje dwie grupy parametrów: parametry czasowo-przestrzenne (Rysunek 1), jak: o długość kroku: odległość pomiędzy punktem odłożenia pięty jednej nogi a punktem odłożenia drugiej nogi, średnia wartość dla chodu prawidłowego to 0,72 m, o długość podwójnego kroku (całego cyklu chodu): odległość pomiędzy punktem odłożenia pięty a punktem ponownego kontaktu pięty tej samej stopy z podłożem, średnia wartość wynosi 1,44 m, o szerokość kroku, rozstęp pomiędzy piętami, wartość średnia wynosi 0,08 m, o kąt kroków: kąt pomiędzy osią długą stopy a kierunkiem ruchu, średnia wartość wynosi 7° o częstość kroków – liczba cykli chodu wykonanych w jednostce czasu, o czas trwania pełnego cyklu chodu- czas od momentu kontaktu pięty z podłożem do momentu ponownego kontaktu piety tej samej kończyny z podłożem, o prędkość chodu,
Transcript of 1. Analiza chodu człowieka...kinematyki chodu człowieka może znaleźć zastosowanie w...
-
1
Magdalena Żuk
Materiały do laboratorium w ramach kursu Mechatronika w Medycynie
Temat: Analiza chodu człowieka z zastosowaniem optycznego systemu śledzenia ruchu
1. Analiza chodu człowieka
Chód jako podstawowy i naturalny sposób przemieszczania się człowieka jest jedną z najbardziej
złożonych czynności ruchowych wykonywanych w życiu codziennym. Analiza chodu jest przedmiotem
zainteresowania klinicystów, gdyż lepsze zrozumienie mechanizmów lokomocji pozwala na
skuteczniejszą diagnostykę i terapię. Ocena wizualna chodu, będącego złożeniem ruchów segmentów
ciała w przestrzeni trójwymiarowej, jest trudna, a diagnoza funkcjonalna powinna być oparta na
badaniach obiektywnych. Rozwój metod pomiarowych pozwala na Ilościowy, trójpłaszczyznowy opis
kinematyki chodu człowieka.
Chód to cykliczna aktywność ruchowa polegająca na powtarzaniu się wzorców koordynacyjnych
kończyn dolnych oraz towarzyszących im współruchów kończyn górnych, tułowia oraz głowy.
Charakterystyczny dla człowieka, dwunożny chód, Kapandji zdefiniował jako cykl kontrolowanych
i zatrzymywanych w porę upadków [1], co jest konsekwencją wybitnie niestabilnej pionowej postawy
ciała. Powtarzalność czasowa cechująca chód nazywa się cyklem chodu. Cykl chodu obejmuje czynności
i ruchy wykonywane przez idącego pomiędzy kontaktem pięty z podłożem kończyny a powtórnym jej
zetknięciem [2,3].
Ilościowy opis kinematyki chodu człowieka obejmuje dwie grupy parametrów:
parametry czasowo-przestrzenne (Rysunek 1), jak:
o długość kroku: odległość pomiędzy punktem odłożenia pięty jednej nogi a punktem
odłożenia drugiej nogi, średnia wartość dla chodu prawidłowego to 0,72 m,
o długość podwójnego kroku (całego cyklu chodu): odległość pomiędzy punktem
odłożenia pięty a punktem ponownego kontaktu pięty tej samej stopy z podłożem,
średnia wartość wynosi 1,44 m,
o szerokość kroku, rozstęp pomiędzy piętami, wartość średnia wynosi 0,08 m,
o kąt kroków: kąt pomiędzy osią długą stopy a kierunkiem ruchu, średnia wartość
wynosi 7°
o częstość kroków – liczba cykli chodu wykonanych w jednostce czasu,
o czas trwania pełnego cyklu chodu- czas od momentu kontaktu pięty z podłożem do
momentu ponownego kontaktu piety tej samej kończyny z podłożem,
o prędkość chodu,
-
2
o czas trwania faz chodu,
o udział faz w cyklu chodu,
parametry kinematyczne, jak:
o kąty w stawach,
o prędkości kątowe i liniowe,
o przyspieszenia kątowe i liniowe.
Rysunek 1 Wybrane parametry przestrzenne związane z cyklem chodu
Szczegółowy opis wyznaczania parametrów czasowo-przestrzennych można znaleźć w pracach [2-5].
Sam pomiar parametrów czasowo-przestrzennych nie wymaga zastosowania zaawansowanych
systemów śledzenia ruchu w przeciwieństwie do parametrów kinematycznych.
Podczas jednego cyklu każda z kończyn dolnych przechodzi przez dwie fazy:
• fazę podporu (obciążania): zajmująca około 60% czasu cyklu chodu podczas przeciętnie
szybkiego chodu; faza podporu rozpoczyna się w momencie zetknięcia pięty z podłożem kończyny,
a kończy w chwili oderwania palucha od podłoża,
• fazę przenoszenia (wykroku): stanowiąca około 40% czasu cyklu chodu; faza rozpoczyna się
w momencie oderwania palucha kończyny od podłoża, a kończy w chwili zetknięcia pięty tej samej
kończyny z podłożem.
W trakcie cyklu chodu występuje również faza podwójnego podparcia [2-3]. Faza podwójnego
podparcia jest to krótki okres podwójnego podporu, w trakcie którego paluch nogi zakrocznej jeszcze
nie oderwał się od podłoża, a pięta nogi wykrocznej już się z nim zetknęła. Czas trwania fazy podwójnego
podporu skraca się wraz ze wzrostem prędkości chodu, podczas przeciętnie szybkiego chodu stanowi
około 10% cyklu, natomiast w trakcie biegu faza ta nie występuje.
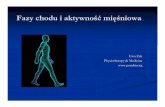
J. Perry podzieliła cykl chodu na osiem faz, które spełniają trzy podstawowe zadania
(Rysunek 2):
1. Przejęcie ciężaru ciała:
Faza I: początkowy kontakt
Faza II: przyparcie całej stopy
2. Podparcie:
Faza II: środkowa faza podparcia
-
3
Faza IV: końcowa faza podparcia
3. Przenoszenie kończyny
Faza V: Przedprzenoszenie
Faza VI: Wstępne przenoszenie
Faza VII: Środkowa faza przenoszenia
Faza VIII: Końcowa faza przenoszenia
Wśród parametrów kinematycznych chodu człowieka najczęściej analizuje się przebieg kątów w stawach
podczas pełnego cyklu chodu. W praktyce klinicznej kinematykę stawu opisuje się trzema rotacjami
w stawie odzwierciedlającymi ruch w różnych płaszczyznach anatomicznych: płaszczyźnie strzałkowej,
płaszczyźnie czołowej i płaszczyźnie poprzecznej. Ideową reprezentację anatomicznych rotacji
w stawach, stosowaną w praktyce klinicznej, przedstawiono na rysunku poniżej (Rysunek 3).
Parametry kinematyczne najczęściej są wyznaczane na podstawie trajektorii markerów umieszczonych
na ciele badanej osoby, zmierzonych przy pomocy optycznych systemów śledzenia ruchu. W analizie
kinematyki chodu, zakłada się, że segmenty są ciałami sztywnymi wykonującymi obrót wokół pewnego
stałego punktu będącego środkiem stawu lub osi. Najczęściej stosowaną metodą ilościowego opisu
wzajemnej orientacji segmentów ciała to metoda Cardana, gdzie ruch w stawie reprezentowany jest
jako złożenie trzech rotacji wokół trzech różnych osi (Rysunek 4). Z każdym segmentem kończyny
związany jest układ współrzędnych zdefiniowany przez umieszczone na ciele markery. Zaletą stosowania
kątów jest pewna intuicyjność anatomiczna, gdyż osie obrotu można powiązać z osiami anatomicznymi,
a uzyskane wyniki mają lepsze odniesienie do terminów klinicznych.
Rysunek 2 Podział cyklu chodu na fazę podporu i przenoszenia oraz 8 podfaz według J. Perry
-
4
Rysunek 3 Definicje ruchów w stawach kończyn dolnych
Rysunek 4 Ilościowa reprezentacja kinematyki stawów podczas chodu
2. Systemy śledzenia ruchu
Ilościowy, trójpłaszczyznowy opis kinematyki chodu człowieka jest możliwy dzięki rozwojowi metod
pomiarowych. Wśród najczęściej wykorzystywanych systemów przechwytywania ruchu możemy
wyróżnić (Rysunek 5):
optoelektroniczne systemy śledzenia ruchu- wielokamerowe systemy mierzące trajektorie
znaczników (markerów) umieszczanych na ciele pacjenta (przykładowe systemy: Vicon,
BTS, Optitrack),
systemy inercyjne - czujniki umieszczane na ciele pacjenta mierzące przyspieszenie oraz
wzajemną orientację segmentów ciała (przykładowe systemy: Xsens, Vicon IMU Blue
Thunder) ,
-
5
systemy wideo- systemy bezmarkerowe, rejestrujące obraz w świetle widzialnym,
wykorzystujące metody analizy obrazu (przykładowy system: Simi),
systemy akustyczne- wykorzystujące pomiar czasu dotarcia lub przesunięcie w fazie
wygenerowanej fali ultradźwiękowej (przykładowy system: Zebris),
elektroniczne goniometry-pomiar kątów w stawie w wybranej płaszczyźnie.
Rysunek 5 Różne technologie śledzenia ruch człowieka: system inercyjny, system akustyczny, goniometry oraz
optoelektroniczny system śledzenia ruchu
Optoelektroniczne systemy śledzenia ruchu
Zdecydowanie najczęściej wykorzystywanymi systemami śledzenia ruchu, zarówno w praktyce
klinicznej, laboratoriach badawczych, jak i na potrzeby tworzenia realistycznych animacji
komputerowych są optoelektroniczne systemy śledzenia ruchu stanowiące „złoty standard” wśród
innych technik pomiarowych. Technologia ta pozwala na pomiar położenia znaczników (tzw. markerów)
w przestrzeni z dużą dokładnością (ok. 0,1 mm ). Najczęściej systemy te składają się z zestawu kamer,
które emitują promieniowanie z zakresu podczerwieni i rejestrują promieniowanie odbite od
pasywnych, odblaskowych markerów (Rysunek 6).
-
6
Rysunek 6 Technologia śledzenia ruchu wykorzystująca pasywne, odblaskowe markery oraz zestaw kamer podczerwieni
Zastosowanie optoelektronicznych systemów śledzenia ruchu w analizie chodu
W praktyce klinicznej najczęściej wykorzystuje się optoelektroniczne systemy śledzenia ruchu
wraz z pasywnymi markerami. Przykładowe wyposażenie laboratorium zamieszczono na
rysunku Rysunek 7. Laboratorium takie zaopatrzone jest w zestaw kamer, zazwyczaj co najmniej 6
kamer podczerwieni i 1-2 kamery wideo rozmieszczone tak, aby możliwa była rejestracja chodu na
ścieżce pomiarowej o długości ok. 5-6 m. Istotną częścią systemu jest oprogramowanie do analizy
biomechanicznej uzyskanych danych pomiarowych.
Rysunek 7 Laboratorium analizy chodu wyposażone w system śledzenia ruchu
Badanie poprzedzone jest przygotowaniem pacjenta. Na ciele pacjenta umieszcza się markery zgodnie
z przyjętym modelem biomechanicznym (tzw. protokołem analizy chodu). Model biomechaniczny
najczęściej stosowany w praktyce klinicznej oraz przygotowanie pacjenta przedstawiono na rysunku
poniżej ( Rysunek 8).
-
7
Rysunek 8 Przygotowywanie pacjenta do pomiaru ( po lewej ), najczęściej stosowany w praktyce klinicznej model
biomechaniczny (po prawej): rozmieszczenie markerów na kończynie dolnej .
3. Zastosowania ilościowej analizy ruchu człowieka
Współcześnie ilościowa analiza ruchu człowieka stosowana jest na dwóch płaszczyznach: w praktyce
klinicznej oraz w badaniach naukowych. W praktyce klinicznej analiza kinematyki chodu znalazła
zastosowanie głównie w trzech obszarach: w ocenie funkcjonalnej pacjenta polegającej na określeniu
w jakim stopniu chód odbiega od wzorca dla osób zdrowych, w ocenie postępów leczenia
operacyjnego, farmakologicznego, czy rehabilitacyjnego oraz w celu opisania stereotypu chodu
różnych jednostek chorobowych [6]. Dotychczas analiza kinematyki chodu przeprowadzona była dla
wielu jednostek chorobowych, a w literaturze można znaleźć wiele prac opisujących chód pacjentów
z takimi schorzeniami, jak mózgowe porażenie dziecięce, uszkodzenie centralnego układu nerwowego,
choroba Parkinsona, choroby zwyrodnieniowe i zapalenia reumatoidalne stawów, amputacje kończyn,
deformacje szkieletowe, jak również pacjentów po alloplastyce stawów. Ponadto ilościowy opis
kinematyki chodu człowieka może znaleźć zastosowanie w projektowaniu protez, ortez, czy
egzoszkieletów. Chociaż sama analiza kinematyki ma charakter głównie opisowy, gdyż rozważany jest
sam ruch bez wnikania w siły, które go wywołują, to wykorzystanie ilościowego opisu kinematyki
w symulacjach dynamicznych daje możliwości wyjaśnienia tych mechanizmów.
-
8
4. Przebieg laboratorium
Celem ćwiczenia jest przeprowadzenie badania kinematyki kończyny dolnej podczas chodu oraz
identyfikacja wybranych parametrów na podstawie zebranych danych pomiarowych.
Podczas badania wykorzystany zostanie optoelektroniczny system śledzenia ruchu Optotrak Certus
firmy NDI. System składa się z :
lokalizatora ( złożonego z 3 kamer podczerwieni),
jednostki głównej,
zestawu aktywnych markerów oraz ramek referencyjnych,
wskaźnika z nawigowaną końcówką z zamontowanymi markerami,
komputera wraz z oprogramowaniem.
Elementy systemu przedstawiono na rysunku Rysunek 9Rysunek 1.
System ten mierzy położenie aktywnych markerów z wysoką dokładnością i częstotliwością. Aktywne
markery (diody IR LED) generują promieniowanie z zakresu podczerwieni (850 nm). Lokalizator złożony
z trzech kamer podczerwieni identyfikuje położenie markerów w przestrzeni z wykorzystaniem
algorytmów triangulacji. Obszar oraz parametry pomiaru przedstawiono na rysunku (Rysunek 10).
Rysunek 9 System do analizy ruchu Optotrak Certus firmy NDI digital składający się z lokalizatora, jednostki głównej,
transmitera, strobera, aktywnych markerów, komputera, odpowiedniego oprogramowania oraz zestawu przewodów
-
9
Rysunek 10 Parametry pomiaru z zastosowaniem systemu śledzenia ruchu Optotrak Certus NDI
Szczegółowy przebieg pomiarów, przygotowanie ochotników do pomiaru, jak również format
uzyskanych danych omówione zostaną w trakcie zajęć laboratoryjnych.
Zadania do wykonania
W ramach pracy własnej należy opracować uzyskane wyniki oraz przygotować sprawozdanie
z ćwiczenia.
Na podstawie zebranych danych pomiarowych należy wyznaczyć:
czas pełnego cyklu chodu,
długość dwukroku ,
średnią prędkość chodu,
udział poszczególnych faz chodu w cyklu wraz z wizualizacją na wykresie.
Dla każdego parametru należy wyznaczyć średnią i odchylenie standardowe. Na rysunku poniżej
zamieszczono materiały pomocnicze do uproszczonej identyfikacji wybranych faz cyklu chodu na
podstawie zmian położenia pięty i śródstopia w czasie (Rysunek 11).
-
10
Rysunek 11 Uproszczony schemat identyfikacji wybranych faz chodu na podstawie położenia pięty i śródstopia
Literatura:
1. Kapandji A., Anatomia funkcjonalna stawów, tom 2, Elsevier Urban and Partner, Wrocław,2009.
2. Kirtley C. ,Clinical Gait Analysis.Theory and Practise, Oxford : Elsevier, 2006.
3. Vaughan C., Dynamic of Human Gait, Cape Town : Kiboho Publisher, 1992.
4. Levine D., Richards J., Whittle M., Analiza chodu, Elsevier Urban and Partner, 2014.
5. Winter D., Biomechanics and motor control of human movement, John Wiley and Sons, 2009.
6. Syczewska M., Lebiedowski M., Kalinowska M., Biomechanika i Inżynieria Rehabilitacyjna.,rozdz.
Analiza chodu w praktyce klinicznej, 2004.