1. 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ
17
Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 1 1. 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 1.1. Wstęp Podstawowym narzędziem służącym do rozwiązywania zadań metodą przemieszczeń są wzory transformacyjne. Pozwalają one określić wartości sił przywęzłowych na podstawie parametrów geometrycznych pręta (sztywność EJ, długość l) oraz przemieszczeń węzłów pręta (liniowych i obrotowych). Jeden ze sposobów wyznaczenia wzorów transformacyjnych polega na określeniu reakcji w podporach belki jednoprzęsłowej. Będą one zależały od typu podpór. Zadanie sprowadza się do rozwiązania belek statycznie niewyznaczalnych (rys. 1.1) metodą sił. Zakładamy wpływy zewnętrzne w postaci klasycznych osiadań podpór (przemieszczenia liniowe prostopadłe do osi belki, przemieszczenia kątowe). a) c) b) l EJ EJ EJ EJ EJ l l Rys. 1.1. Schematy belek statycznie niewyznaczalnych Przed przystąpieniem do obliczeń należy przyjąć umowę dotyczącą znaków poszczególnych wielkości. Najwygodniejsza dla metody przemieszczeń będzie taka, która uprości obliczenia i wyeliminuje w jak największym stopniu różnice znaków poszczególnych wyrazów w równaniach. W związku z tym będziemy traktować jako dodatnie : • momenty działające przy węzłach prętów zgodnie z ruchem wskazówek zegara (układ prawoskrętny) (rys. 1.2), • siły poprzeczne obracające odciętą część pręta zgodnie z ruchem wskazówek zegara (rys. 1.2), • kąty obrotu przekrojów węzłowych φ zgodne z ruchem wskazówek zegara (rys. 1.3), • przemieszczenia Δ zgodne z kierunkiem i zwrotem przyjętego układu współrzędnych (rys. 1.3). Wielkości ujemne będą miały zwroty przeciwne w stosunku do wymienionych. Ponadto tak jak dotychczas wykresy momentów zginających będziemy odkładać po stronie włókien rozciąganych, czyli od wypukłej strony osi odkształconej. T>0 T<0 M>0 M>0 M>0 M<0 Rys. 1.2. Znakowanie momentów zginających i sił poprzecznych Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater
Transcript of 1. 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 1
1.
1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ
1.1. WstępPodstawowym narzędziem służącym do rozwiązywania zadań metodą przemieszczeń są wzory
transformacyjne. Pozwalają one określić wartości sił przywęzłowych na podstawie parametrówgeometrycznych pręta (sztywność EJ, długość l) oraz przemieszczeń węzłów pręta (liniowych i obrotowych).
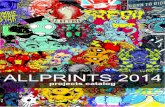
Jeden ze sposobów wyznaczenia wzorów transformacyjnych polega na określeniu reakcji w podporachbelki jednoprzęsłowej. Będą one zależały od typu podpór. Zadanie sprowadza się do rozwiązania belekstatycznie niewyznaczalnych (rys. 1.1) metodą sił. Zakładamy wpływy zewnętrzne w postaci klasycznychosiadań podpór (przemieszczenia liniowe prostopadłe do osi belki, przemieszczenia kątowe).
a) c)b)
l
EJ EJ EJ
EJ EJ
l l
Rys. 1.1. Schematy belek statycznie niewyznaczalnych
Przed przystąpieniem do obliczeń należy przyjąć umowę dotyczącą znaków poszczególnych wielkości.Najwygodniejsza dla metody przemieszczeń będzie taka, która uprości obliczenia i wyeliminuje w jaknajwiększym stopniu różnice znaków poszczególnych wyrazów w równaniach.
W związku z tym będziemy traktować jako dodatnie:
• momenty działające przy węzłach prętów zgodnie z ruchem wskazówek zegara (układ prawoskrętny)(rys. 1.2),
• siły poprzeczne obracające odciętą część pręta zgodnie z ruchem wskazówek zegara (rys. 1.2),
• kąty obrotu przekrojów węzłowych φ zgodne z ruchem wskazówek zegara (rys. 1.3),
• przemieszczenia Δ zgodne z kierunkiem i zwrotem przyjętego układu współrzędnych (rys. 1.3).
Wielkości ujemne będą miały zwroty przeciwne w stosunku do wymienionych. Ponadto tak jakdotychczas wykresy momentów zginających będziemy odkładać po stronie włókien rozciąganych, czyli odwypukłej strony osi odkształconej.
T>0
T<0
M>0 M>0
M>0 M<0
Rys. 1.2. Znakowanie momentów zginających i sił poprzecznych
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 2
i k
k
i
Δi>0
Δk>0
φi>0
φk>0
z
x
Rys. 1.3. Znakowanie kątów obrotu φ i przemieszczeń pionowych Δ węzłów podporowych
Procedurę wyprowadzania wzorów transformacyjnych omówimy analizując różne przypadki podparciapręta.
1.2. Belka utwierdzona
Rozpatrzmy belkę obustronnie utwierdzoną o długości l i sztywności EJ (rys. 1.4), której podporydoznają przemieszczeń φi, φk, Δi, Δk.
i kΔ
i
Δk
φi φk
z
x
EJ
l
Rys. 1.4. Schemat belki obustronnie utwierdzonej poddanej przemieszczeniom podpór
Narysujmy stan po przemieszczeniu podpór i, k o zadane wartości (rys. 1.5). W rozważaniachprzemieszczenia podpór będą dowolne, lecz z uwagi na czynione uproszczenia przyjmujemy, że ich wartościsą niewielkie (małe w stosunku do wymiarów pręta).
i k
Δi
Δk
φi φk
z,w
x
Ψik
Rys. 1.5. Stan po przemieszczeniu belki
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 3
Na rys. 1.5 symbol ψik oznacza obrót cięciwy wynikający z pionowych przemieszczeń podpór Δ:
tgik=k−i
l=k
l−i
l(1.1)
ponieważ dla małych kątów tg ψik ≈ ψik , to możemy zapisać:
ik=k
l−i
l=k−i
l(1.2)
Aby rozwiązać zadanie metodą sił trzeba przyjąć układ podstawowy oraz odpowiadające mu warunkiprzemieszczeniowe.
X1 X2
Δi Δk
φi
φk
X3
Rys. 1.6. Układ podstawowy
1 =0 2 =0 3 =0
Ponieważ pomijamy w obliczeniach wpływ sił normalnych współczynniki δ3i (siła X3 wywołuje tylko siłęnormalną) będą równe zero, a układ równań kanonicznych ograniczy się do dwóch równań:
11⋅X 112⋅X 21=0
21⋅X 122⋅X 22=0(1.3)
W celu obliczenia przemieszczeń z układu (1.3) narysujemy wykresy momentów w stanach X1 = 1 i X2 = 1.
X1=1H = 0
l
Rk(1)=R
i(1)=
1
M1[-]
X2=1H = 0
l
Rk(2)=R
i(2)=
1
M2[-]
i
k ik
1l
1l
1l
1l
Rys. 1.7. Reakcje i momenty zginające w stanach X1 = 1 i X2 = 1
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 4
Obliczamy współczynniki macierzy podatności metodą Wiereszczagina-Mohra:
11=1
EJ⋅1
2⋅1 ⋅l⋅2
3⋅1 = l
3 EJ
22=1
EJ⋅1
2⋅1 ⋅l⋅2
3⋅1 = l
3 EJ
12=21=1
EJ⋅1
2⋅1 ⋅l⋅1
3⋅1 =− l
6 EJ
A wyrazy wolne ΔiΔ według wzoru:
i =−i−∑j
R ji ⋅ j (1.4)
gdzie:i - rzeczywiste, narzucone przemieszczenie zgodne z kierunkiem niewiadomej Xi,
R ji - reakcja w podporze j, w stanie Xi = 1,
j - przemieszczenie narzucone po kierunki reakcji R ji .
1=−i−1l⋅i
1l⋅k=−iik
2=−k−1l⋅i
1l⋅k=−kik
Po podstawieniu otrzymanych wartości równanie kanoniczne (1.3) uzyskuje postać
l3 EJ
⋅X 1−l
6 EJ⋅X 2ik−i =0
− l6 EJ
⋅X 1l
3 EJ⋅X 2ik−k =0
(1.5)
Rozwiązanie układu (1.5) prowadzi do wartości sił nadliczbowych:
X 1=2 EJ
l⋅2ik−3ik (1.6)
X 2=2 EJ
l⋅i2 k−3ik (1.7)
W przyjętym układzie podstawowym siły nadliczbowe Xi oznaczają reakcje podporowe, a zarazemrównoważne im wewnętrzne siły przypodporowe (rys. 1.8). Można zapisać:
X 1=M ik
X 2=M ki
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 5
gdzie:M ik to przęsłowy, przywęzłowy moment zginający w przekroju i,M ki to przęsłowy, przywęzłowy moment zginający w przekroju k.
i k
Mik
Mki
Mk
Mi
Rys. 1.8. Momenty podporowe i przywęzłowe momenty zginające
Obliczmy jeszcze reakcje Ri i Rk.
∑M i=0 ⇔2 EJ
l⋅2ik−3ik
2 EJl
⋅i2 k−3ik Rk⋅l=0 (1.8)
Rk=−6 EJl 2 ⋅ik−2ik (1.9)
Ri=−6 EJ
l 2 ⋅ik−2ik (1.10)
Ponieważ reakcje węzłowe są równoważne wewnętrznym siłom przywęzłowym (rys. 1.9)
Rk=T ki Ri=T ik
to siła tnąca wynosi:
T ik=T ki=−6 EJl 2 ⋅ik−2ik (1.11)
gdzie:T ik , T ki oznaczają przęsłowe, przywęzłowe siły poprzeczne.
i kTikTki
Rk
Ri
Rys. 1.9. Reakcje podporowe i przywęzłowe siły poprzeczne
Gdy znamy już wartości wszystkich sił, to możemy narysować wykresy rzeczywistych sił wewnętrznych.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 6
X1= (2φi+φk-3Ψik)
l
RkR
i
M[kNm]
i k
X2= (φi+2φk-3Ψik)
Mik
Mk i
T[kN]T
ik=T
ki=- (φ
i+φ
k-2Ψ
ik)-
2EJ l
2EJ l
6EJ l2
Rys. 1.10. Wykresy rzeczywistych sił wewnętrznych dla belki obustronnie utwierdzonej, obciążonejprzemieszczeniami φi, φk, Δi, Δk
Ostatecznie dla belki obustronnie utwierdzonej (rys. 1.4) otrzymaliśmy komplet wzorówtransformacyjnych:
M ik=2 EJ
l⋅2ik−3ik
M ki=2 EJ
l⋅i2 k−3ik
(1.12)
T ik=−6 EJl 2 ⋅ik−2ik
T ki=−6 EJl 2 ⋅ik−2ik
(1.13)
Należy przypomnieć, że wzory transformacyjne metody przemieszczeń zależą od warunkówbrzegowych belki i przedstawiają relacje między przęsłowymi, przywęzłowymi siłami wewnętrznymi, auogólnionymi przemieszczeniami jej podpór.
1.3. Równanie osi odkształconej
Napiszemy równanie osi odkształconego, obustronnie utwierdzonego pręta (rys. 1.5) poddanegowpływom osiadań podpór φi, φk, Δi, Δk (nie obciążonego siłami zewnętrznymi).
Aby rozwiązać to zadanie korzystamy z równania różniczkowego linii ugięcia.
[EJ w' ' x ] ' '=q x
Ponieważ nie ma obciążeń zewnętrznych q x =0 otrzymujemy równanie jednorodne
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 7
[EJ w' ' x ] ' '=0
które następnie całkujemy
[EJ w' ' x ] '=c
EJ w' ' x =cxd
EJ w' x =c⋅x2
2dxe (1.14)
Ostatecznie funkcja osi odkształconej jest wielomianem trzeciego stopnia
EJ w x =c⋅x3
6d⋅x2
2ex f (1.15)
Stałe całkowania wyznaczamy z warunków brzegowych, które dla belki przedstawionej na rys. 1.4 wyrazimyprzez wielkości kinematyczne (przemieszczenia):
{w x=0 =i
w' x=0=i
w x=l =k
w' x=l =k
(1.16)
Po podstawieniu warunków brzegowych (1.16) do równań (1.14) i (1.15) uzyskujemy układ równań:
{EJ i= fEJ i=e
EJ k=cl 3
6dl 2
2el f
EJ k=cl 2
2dle
Podstawienie dwóch pierwszych związków do dwóch ostatnich równań
{EJ k=cl 3
6dl 2
2EJ i⋅lEJ i
EJ k=cl 2
2d⋅lEJ i
po przekształceniach
d⋅l=EJ k−cl 2
2−EJ i
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 8
d= EJl
k−cl2− EJ
li
EJ k=cl 3
6 EJ
lk−
cl2− EJ
li⋅l 2
2EJ i⋅lEJ i
cl 3
6− cl 3
4=EJ k−EJ i−EJ i⋅l− EJ
2k⋅l EJ
2i⋅l
prowadzi do wartości stałych c i d:
c=6 EJl 2 ⋅ik
12 EJl 3 ⋅i−k
d= EJl
k−EJl
i−l2⋅[6 EJ
l 2 ⋅ik 12 EJ
l 3 ⋅i−k ]d=−2 EJ
lk−
4 EJl
i−6 EJ
l 2 ⋅i−k
Równanie osi odkształconej pręta obustronnie utwierdzonego poddanego przemieszczeniu węzłówpodporowych wyraża się funkcją:
EJ wx =[6 EJl 2 ⋅ik
12 EJl 3 ⋅i−k ]⋅x3
6[−2 EJ
lk2i −
6 EJl 2 ⋅i−k ]⋅x2
2EJ i xEJ i
wx =[ik 2l⋅i−k ]⋅x3
l 2 [−k2i −3l⋅i−k ]⋅x2
li⋅xi
1.4. Belka utwierdzona jednostronnie
Rozpatrzmy belkę utwierdzoną z jednej strony (rys. 1.11), której podpory ulegają przemieszczeniom φi,Δi, Δk. Poniższy przykład rozwiążemy dwoma metodami: metodą sił (analogicznie do punktu 1.2) orazkorzystając z gotowych wyników otrzymanych w punkcie 1.2 (przyjmując odpowiednie warunki brzegowe).
Δi
Δk
φi
i k
l
Rys. 1.11. Schemat belki jednostronnie utwierdzonej
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 9
Metoda I – metoda sił
Zgodnie z zasadami metody sił przyjmujemy układ podstawowy
Δi
Δk
φi
i k
l
X1
Rys. 1.12. Układ podstawowy
w którym przemieszczenie po kierunku zwolnionego więzu musi być równe zero (δ1 = 0). Wynikające z tegowarunku równanie kanonicznych będzie miało następującą postać:
11⋅X 11=0 (1.17)
Aby obliczyć współczynniki równania narysujemy wykresy momentów w stanie X1 = 1 (analogicznie jak narys. 1.7).
i
k
l
X1=1
H = 0
1
M1[-]
1l
1l
Rys. 1.13. Reakcje i momenty zginające w stanie X1 = 1
i wyznaczamy wartości przemieszczeń:
11=1
EJ⋅1
2⋅1 ⋅l⋅2
3⋅1 = l
3 EJ
1=−i−1l⋅i
1l⋅k=−iik
Po podstawieniu otrzymanych wyników do równania kanonicznego (1.17)
l3 EJ
⋅X 1ik−i =0
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 10
uzyskujemy wartość nadliczbowej siły
X 1=3 EJ
l⋅i−ik (1.18)
Niewiadoma X1 jest reakcją podporową, której wartość odpowiada wewnętrznej sile przywęzłowej
X 1=M ik
M ik to przęsłowy, przywęzłowy moment zginający w przekroju i. Natomiast przęsłowy, przywęzłowymoment zginający w przekroju k jest równy zero (przegub).
M ki=0
Obliczmy wartości reakcji Ri i Rk.
∑M k=0 ⇔3 EJ
l⋅i−ik Ri⋅l=0
Ri=−3 EJl 2 ⋅i−ik (1.19)
Rk=−3 EJl 2 ⋅i−ik (1.20)
które pokrywają się z wartościami sił tnących (przęsłowych, przywęzłowych)
T ik=T ki=−3 EJ
l 2 ⋅i−ik (1.21)
Znając wartość nadliczbowej X1 możemy narysować wykres rzeczywistych sił wewnętrznych.
i
k
l
H=0
Ri
Mik
X1= (φ
ik-Ψ
ik)
M[kNm]
T[kN]
Tik=T
ki=- (φ
i-Ψ
ik)
RK
-
3EJ l
3EJ l2
Rys. 1.14. Wykresy rzeczywistych sił wewnętrznych dla belki utwierdzonej z jednej strony,obciążonej przemieszczeniami φi, Δi, Δk
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 11
Metoda II
W tej metodzie wzory (1.12), (1.13) potraktujemy jako uniwersalne i po podstawieniu odpowiednichwarunków brzegowych wyprowadzimy wzory transformacyjne dla rozpatrywanego przypadku.
Wiemy, że dla belki (rys. 1.11) utwierdzonej z lewej strony i podpartej prętem ze strony prawej momentprzęsłowy, przywęzłowy Mki = 0, a zatem na podstawie równania (1.12) możemy zapisać:
M ki=2 EJ
l⋅i2 k−3ik =0 (1.22)
Z równania tego wyznaczamy funkcję kąta obrotu φk
i2 k−3ik=0
k=3ik−i
2(1.23)
Po podstawieniu funkcji φk do równań (1.12), (1.13) otrzymujemy komplet wzorów transformacyjnych dlabelki jednostronnie utwierdzonej (utwierdzenie z lewej strony):
M ik=2 EJ
l⋅2i
3ik−i
2−3ik=3 EJ
l⋅i−ik (1.24)
M ki=0 (1.25)
T ki=T ik=−6 EJl 2 ⋅i
3ik−i
2−2ik=−3 EJ
l 2 ⋅i−ik (1.26)
Dla belki o podobnych podporach (rys.1.15) jednak ułożonych przeciwnie, czyli będącej lustrzanymodbiciem układu z rys. 1.11 można zapisać gotowe wzory transformacyjne.
Δi
Δk
φk
i k
l
Rys. 1.15. Schemat belki utwierdzonej z prawej strony
M ik=0 (1.27)
M ki=3 EJ
l⋅k−ik (1.28)
T ki=T ik=−3 EJ
l 2 ⋅k−ik (1.29)
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 12
1.5. Belka obustronnie utwierdzona z przesuwem
Rozpatrzmy belkę o schemacie przedstawionym na rys. 1.16, której podpory doznają przemieszczeń φi,φk. Przemieszczenie pionowe podpory i o Δi spowoduje ruch całej belki i nie wywoła sił wewnętrznych, dlategoten wpływ pomijamy. Poniższy przykład taj jak poprzednio rozwiążemy dwoma metodami.
i k
φi φk
l
Rys. 1.16. Schemat belki utwierdzonej z przesuwem
Metoda I – metoda sił
Przyjmujemy układ podstawowy.
i k
φi
φk
l
X1
X2
Rys. 1.17. Układ podstawowy
i zapisujemy równanie kanoniczne (nie uwzględniamy sił normalnych):
1 =11⋅X 11=0 (1.30)
Aby obliczyć współczynniki równania rysujemy wykres momentów w stanie X1 = 1.
i
k
l
X1=1
Mi=1
H = 0
Ri=0
M1[-]
1
Rys. 1.18. Reakcje i momenty zginające w stanie X1 = 1
Obliczamy współczynniki równania kanonicznego.
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 13
11=1
EJ⋅1 ⋅l⋅1= l
EJ
1=−ki
Po podstawieniu otrzymanych wyników do równania (1.30)
lEJ
⋅X 1i−k =0 (1.31)
Otrzymujemy wartości nadliczbowej siły:
X 1=EJl⋅−ik (1.32)
Reakcja w podporze odpowiada momentowi zginającemu w przekroju podporowym:
M ki=X 1=EJl⋅−ik
M ki to przęsłowy, przywęzłowy moment zginający w przekroju k. Natomiast przęsłowy, przywęzłowymoment zginający w przekroju i wynosi.
M ik=−X i=EJl⋅i−k
Siła tnąca przy braku obciążeń zewnętrznych jest równa reakcji
T ik=T ki=Ri=0 (1.33)
Na koniec rysujemy wykresy rzeczywistych sił wewnętrznych.
i
k
l
M[kNm]
X1= (-φ
i+φ
k)
Mi= (-φ
i+φ
k)
T[kN]
0
EJ l
EJ l
Mk i= (-φ
i+φ
k)EJ
lMi k= (φ
i-φ
k)EJ
l
Rys. 1.19. Wykresy rzeczywistych sił wewnętrznych dla belki obustronnie utwierdzonej,obciążonej przemieszczeniami φi, φk
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 14
Metoda II
Wykorzystujemy wzory (1.12), (1.13) (traktujemy je jako uniwersalne) i podstawiamy odpowiedniewarunki brzegowe. W ten sposób otrzymujemy wzory transformacyjne dla rozpatrywanego przypadku.
Wiemy, że dla belki przedstawionej na rys. 1.16 siły tnące Tki = Tik = 0, a zatem na podstawierównania (1.13) możemy zapisać:
T ik=−6 EJl 2 ⋅ik−2ik =0 (1.34)
Z równania (1.34) wyliczamy ψik
ik−2ik=0 (1.35)
ik=ik
2(1.36)
Jeśli podstawimy ψik do równań (1.12), to otrzymamy komplet wzorów transformacyjnych:
M ik=2 EJ
l⋅2ik−3 ⋅
ik
2 = EJl⋅i−k (1.37)
M ki=2 EJ
l⋅i2 k−
3 ⋅ik
2 = EJl⋅−ik (1.38)
T ik=T ki=0 (1.39)
Dla belki o schemacie podanym na rys. 1.20 (lustrzane odbicie do rys. 1.16) wzory transformacyjne są takiesame jak w powyższym przykładzie.
i k
φi φk
l
i
k
M[kNm]
X1= (φ
i-φ
k)
Mk= (φ
i-φ
k)
EJ l
EJ l
Mk i= (φ
k-φ
i)EJ
lMi k= (φ
i-φ
k)EJ
l
T[kN]0
Rys. 1.20. Schemat belki
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 15
Wyniki rozważań zestawiono w tabeli 1.1. Podano wartości przywęzłowych sił wewnętrznych wzależności od sposobu podparcia belki wywołane jednostkowymi przemieszczeniami węzłów podporowych.Natomiast w tabeli 1.2 zestawiono wykresy sił wewnętrznych (przywęzłowych) dla trzech schematów belek odobciążeń zewnętrznych (przęsłowych).
Uwaga: w tabelach narysowane są wykresy momentów zginających “po inżyniersku”, tzn. wykres po stroniewłókien rozciąganych. Natomiast ich wartości podano zgodnie z zasadami metody przemieszczeń, tzn.momenty dodatnie działają zgodnie z ruchem wskazówek zegara (prawoskrętnie).
Tabela 1.1. Wykresy momentów zginających i sił poprzecznych od jednostkowych przemieszczeń podporowych
Schemat belki M T
i k
φi=1
l
EJ4EJ l
2EJ l 6EJ
l-6EJ
l-
i k
φk=1
l
EJ2EJ l
4EJ l 6EJ
l-6EJ
l-
i kΔ
i=1
l
EJ
6EJ l2
6EJ l2 12EJ
l3-12EJ
l3-
i k
Δk=1l
EJ6EJ l2
6EJ l2
-
- 12EJ l3
12EJ l3
i k
φi=1
l
EJ3EJ l
3EJ l2
3EJ l2
iΔ
i=1
l
EJ
3EJ l2
3EJ l3
3EJ l3
i k
Δk=1
l
EJ
3EJ l2
- 3EJ l3
3EJ l3
- -
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 16
Schemat belki M T
i k
φi=1
l
EJ EJ l
EJ l
- 0
i k
φk=1
l
EJ EJ l
- EJ l 0
Tabela 1.2. Wykresy momentów zginających i sił poprzecznych od przęsłowych obciążeń
Schemat belki M T
P
l2
l2 Pl
8
Pl8
-Pl 8
P2
-
+P2
q
l
ql2 12
- ql2 12
ql 2 -
+ ql 2
M
l2
l2
M 4
M 4
3M 2l- - 3M
2l-
P
l2
l2
-3Pl16 0
11P16
-
+5P16
q
l
ql2 8
-0
5ql 8 +
3ql 8-
M
l2
l2
M 8
0 9M 16
7M 16 9M
8l- 9M
8l--
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater

Część 2 1. WZORY TRANSFORMACYJNE METODY PRZEMIESZCZEŃ 17
Schemat belki M T
P
l2
l2
-3Pl8
-Pl8
P +
q
l
ql2 3
- ql2 6
- ql +
M
l2
l2
M2 M
20
P
ξ= xl ξ'= l-x
l
xl Plξ'ξ
2-Plξξ' 2-Pξ
2(3-2ξ)
-
+
Pξ' (1+ξ-2ξ 2)
ξ= xl ξ'= l-x
l
xl
M Mξ' (2-3ξ' )
Mξ(2-3ξ)-6M
lξξ'
6M l
ξξ'
Dobra D., Dziakiewicz Ł., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A. AlmaMater