· 4 Biofizyka jest nauk „fizycznych aspektów biologii”, wł czaj c w to zastosowanie praw...
53
1 K P B . 2.1
Transcript of · 4 Biofizyka jest nauk „fizycznych aspektów biologii”, wł czaj c w to zastosowanie praw...
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
1
Wrocław, listopad 2004
KURS PODSTAW BIOFIZYKI VER. 2.1 dla studentów Wychowania Fizycznego i Fizjoterapii

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
2
S P I S T R E Ś C I :
1. M ECHANIKA CIAŁ STAŁYCH ...........................................................................................4 1.1. WIELKOŚCI FIZYCZNE I ICH JEDNOSTKI.............................................................................. 4 1.2. K INEMATYKA RUCHU POSTĘPOWEGO I RUCHU PO OKRĘGU ................................................ 5
1.2.1. Ruch postępowy (liniowy)...............................................................................6
1.2.2. Rzut ukośny. ...................................................................................................8
1.2.3. Ruch obrotowy................................................................................................9
2. DYNAMIKA RUCHU PROSTOLINIOWEGO .......................................................................11 2.1. ŚRODEK MASY................................................................................................................. 11 2.2. PĘD PUNKTU MATERIALNEGO. ......................................................................................... 12 2.3. ZASADY DYNAMIKI NEWTONA ........................................................................................ 12 2.4. ZASADA ZACHOWANIA PĘDU. .......................................................................................... 12 2.5. PRACA I ENERGIA ............................................................................................................ 13
2.5.1. Praca mechaniczna........................................................................................13
2.5.2. Energia potencjalna.......................................................................................14
2.5.3. Energia kinetyczna........................................................................................14
2.5.4. Moc ..............................................................................................................14
2.5.5. Zasada zachowania energii............................................................................15 2.6. DYNAMIKA BRYŁY SZTYWNEJ......................................................................................... 15
2.6.1. Moment siły ..................................................................................................16
2.6.2. Moment pędu................................................................................................16
2.6.3. Zasady dynamiki Newtona dla ruchu obrotowego .........................................16
2.6.4. Zachowanie momentu pędu...........................................................................17
2.6.5. Moment bezwładności...................................................................................17
2.6.6. Ruch obrotowo-postępowy............................................................................18
3. M ECHANIKA PŁYNÓW ..................................................................................................20 3.1. CIŚNIENIE I GĘSTOŚĆ ....................................................................................................... 20
3.1.1. Ciśnienie hydrostatyczne...............................................................................21
3.1.2. Ciśnienie atmosferyczne................................................................................21
3.1.3. Prawo Pascala ...............................................................................................21
3.1.4. Prawo Archimedesa ......................................................................................22
3.1.5. Ogólny opis przepływu płynów.....................................................................22
3.1.6. Równanie Bernoulliego.................................................................................24
3.1.7. Dynamiczna siła nośna..................................................................................24
3.1.8. Siła oporów aerodynamicznych.....................................................................25
4. FALA AKUSTYCZNA (DŹWIĘKOWA ) .............................................................................26 4.1. NATĘśENIE I POZIOM NATĘśENIA DŹWIĘKU; ................................................................... 27 4.2. ZAŁAMANIE I ODBICIE FALI DŹWIĘKOWEJ....................................................................... 28 4.3. ZJAWISKO DOPPLERA......................................................................................................30
5. TERMODYNAMIKA .......................................................................................................30 5.1. GAZ DOSKONAŁY ............................................................................................................ 30 5.2. TEMPERATURA, RÓWNANIE STANU GAZU DOSKONAŁEGO................................................ 31
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
3
5.2.1. Zerowa zasada termodynamiki ......................................................................31
5.2.2. Kinetyczna interpretacja temperatury ............................................................31
5.2.3. Równanie stanu gazu doskonałego ................................................................31
5.2.4. Pomiar temperatury, skale temperatur ...........................................................32 5.3. EKWIPARTYCJA ENERGII.................................................................................................. 32 5.4. PIERWSZA ZASADA TERMODYNAMIKI .............................................................................. 33 5.5. CIEPŁO WŁAŚCIWE........................................................................................................... 34 5.6. BILANS CIEPLNY.............................................................................................................. 34 5.7. ZASADA BILANSU CIEPLNEGO: ......................................................................................... 35 5.8. PROCESY ODWRACALNE I NIEODWRACALNE, CYKL CARNOTA ......................................... 35 5.9. ENTROPIA I DRUGA ZASADA TERMODYNAMIKI................................................................. 35 5.10. ENTROPIA........................................................................................................................ 36
5.10.1. Entropia a nieuporządkowanie.......................................................................37 5.11. STANY RÓWNOWAGI, ZJAWISKA TRANSPORTU................................................................. 37
5.11.1. Stany równowagi fazowej .............................................................................37
5.11.2. Zjawiska transportu.......................................................................................38
6. ELEKTRYCZNO ŚĆ I MAGNETYZM ................................................................................39 6.1. ELEKTROSTATYKA .......................................................................................................... 40
6.1.1. Spoczywający ładunek elektryczny ...............................................................40 6.2. ELEKTRODYNAMIKA ........................................................................................................ 40
6.2.1. Rodzaje prądu ...............................................................................................41
6.2.2. Charakterystyka prądu elektrycznego ............................................................41
6.2.3. Prąd zmienny, impedancja (zawada) układu RLC:.........................................43
6.2.4. Transport jonów w błonach i potencjały błonowe. .........................................43
6.2.5. Wpływ prądu stałego na organizm.................................................................44
6.2.6. Elektroterapia w „pigułce” ............................................................................44 6.3. REZONANS MAGNETYCZNY.............................................................................................. 45
6.3.1. Moment magnetyczny ...................................................................................45 6.4. POLE ELEKTROMAGNETYCZNE......................................................................................... 45
6.4.1. Powstawanie światła laserowego...................................................................47
7. PROMIENIOWANIE CIEPLNE .........................................................................................49 7.1. PRAWO PROMIENIOWANIA K IRCHHOFFA.......................................................................... 50 7.2. PRAWO PROMIENIOWANIA PLANCKA ............................................................................... 50 7.3. PRAWO PRZESUNIĘĆ WIENA: ........................................................................................... 51 7.4. PRAWO PROMIENIOWANIA STEFANA – BOLTZMANNA : ..................................................... 51 7.5. TERMOGRAFIA................................................................................................................. 52
8. PROMIENIOWANIE NIEJONIZUJ ĄCE (W PRZYGOTOWANIU ):............................52 9. PROMIENIOWANIE JONIZUJĄCE: (W PRZYGOTOWANIU ) ..................................52
10. UZUPEŁNIENIA....................................................................................................53 10.1. ALFABET GRECKI. ........................................................................................................... 53 10.2. WYBRANE STAŁE FIZYCZNE............................................................................................. 53 10.3. LITERATURA.................................................................................................................... 53
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
4
Biofizyka jest nauką „fizycznych aspektów biologii”, włączając w to zastosowanie praw fizyki i techniki do opisu procesów zachodzących w Ŝywych organizmach (w szczególności człowieku). Działy fizyki w niniejszych materiałach (tj. mechanika ciał stałych, cieczy i gazów, akustyka, termodynamika, elektryczność i magnetyzm, promieniowanie ciał oraz elementy fizyki współczesnej) zostały dobrane w taki sposób aby w moŜliwie uproszczony sposób wyjaśnić niektóre zjawiska fizyczne zachodzące w organizmie człowieka. Niniejsze materiały mają stanowić jedynie pomocnicze źródło wiedzy do poznawanych zagadnień, dlatego uprzejmie zachęca się czytelnika do sięgnięcia równieŜ do innych pozycji literaturowych w szerokim wachlarzu ofert dostępnych na rynku wydawniczym.
autor
1. M ECHANIKA CIAŁ STAŁYCH
Mechanika jest działem fizyki zajmującym się opisem ruchu ciał materialnych lub ich części wynikający z ich wzajemnych oddziaływań oraz badaniem stanu równowagi pomiędzy nimi. WyróŜnia się mechanikę klasyczną (opartą na teorii Isaaka Newtona) oraz mechanikę relatywistyczną (uwzględniającą efekty przewidywane przez teorię względności Alberta Einsteina). Mechanikę dzieli się na kinematykę i kinetykę (dynamikę):
Kinematyka jest działem mechaniki zajmującym się geometrycznym (matematycznym) opisem ruchu ciał bez analizowania sił, które ten ruch wywołały.
Kinetyka (teŜ dynamika) dział mechaniki badający ruch wywołany działaniem na układ określonych sił.
1.1. WIELKOŚCI FIZYCZNE I ICH JEDNOSTKI Prawa fizyki wyraŜają związki między róŜnymi wielkościami fizycznymi. Prawa te
formułowane są w postaci równań matematycznych wyraŜających ścisłe ilościowe relacje między tymi wielkościami, a to wiąŜe się zawsze z pomiarami określającymi liczbowo stosunek danej wielkości do przyjętej jednostki .
Wiele z wielkości fizycznych jest współzaleŜnych. Na przykład prędkość jest długością podzieloną przez czas, gęstość masą podzieloną przez objętość itd. Dlatego z pośród wszystkich wielkości fizycznych wybieramy pewną ilość tak zwanych wielkości podstawowych, za pomocą których wyraŜamy wszystkie pozostałe wielkości nazywane wielkościami pochodnymi. Z tym podziałem związany jest równieŜ wybór jednostek. Jednostki podstawowe wielkości podstawowych są wybierane (ustalane), a jednostki pochodne definiuje się za pomocą jednostek podstawowych.
Aktualnie obowiązującym w Polsce układem jednostek jest układ SI (Systeme International d'Unites). Uklad SI ma siedem jednostek podstawowych i dwie uzupełniające niezbędne w sformułowaniach praw fizyki. Wielkości podstawowe i ich jednostki są zestawione w tabeli 1.1 poniŜej.
Definicje jednostek podstawowych są związane albo ze wzorcami jednostek albo z pomiarem. Przykładem jednostki związanej ze wzorcem jest masa. Obecnie światowym wzorcem kilograma (kg) jest walec platynowo – irydowy przechowywany w Międzynarodowym Biurze Miar i Wag w Sevres (Francja). Natomiast przykładem jednostki związanej z pomiarem jest długość. Metr (m) definiujemy jako długość drogi przebytej w próŜni przez światło w czasie 1/299792458 s.
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
5
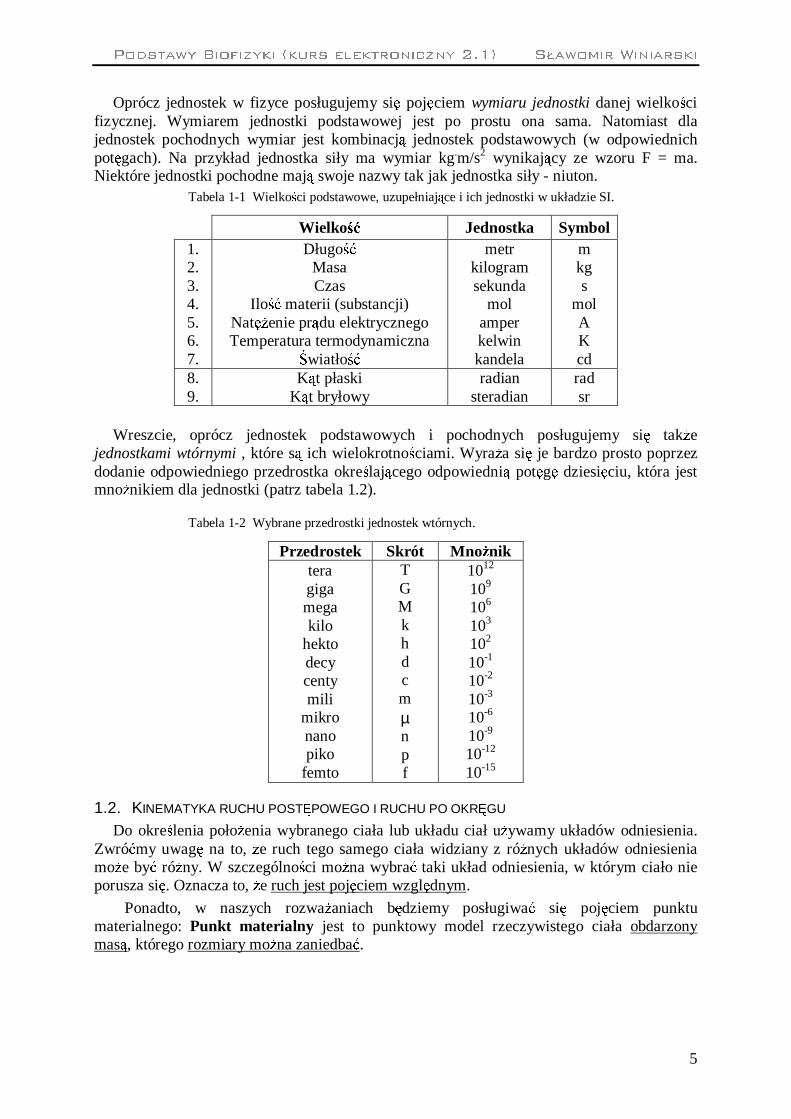
Oprócz jednostek w fizyce posługujemy się pojęciem wymiaru jednostki danej wielkości fizycznej. Wymiarem jednostki podstawowej jest po prostu ona sama. Natomiast dla jednostek pochodnych wymiar jest kombinacją jednostek podstawowych (w odpowiednich potęgach). Na przykład jednostka siły ma wymiar kg.m/s2 wynikający ze wzoru F = ma. Niektóre jednostki pochodne mają swoje nazwy tak jak jednostka siły - niuton.
Tabela 1-1 Wielkości podstawowe, uzupełniające i ich jednostki w układzie SI.
Wielkość Jednostka Symbol 1. 2. 3. 4. 5. 6. 7.
Długość Masa Czas
Ilość materii (substancji) NatęŜenie prądu elektrycznego Temperatura termodynamiczna Światłość metr
kilogram sekunda
mol amper kelwin kandela
m kg s
mol A K cd
8. 9.
Kąt płaski Kąt bryłowy
radian steradian
rad sr
Wreszcie, oprócz jednostek podstawowych i pochodnych posługujemy się takŜe jednostkami wtórnymi , które są ich wielokrotnościami. WyraŜa się je bardzo prosto poprzez dodanie odpowiedniego przedrostka określającego odpowiednią potęgę dziesięciu, która jest mnoŜnikiem dla jednostki (patrz tabela 1.2).
Tabela 1-2 Wybrane przedrostki jednostek wtórnych.
Przedrostek Skrót MnoŜnik tera giga mega kilo
hekto decy centy mili
mikro nano piko
femto
T G M k h d c m µ n p f
1012 109 106 103 102 10-1 10-2 10-3 10-6 10-9 10-12 10-15
1.2. KINEMATYKA RUCHU POSTĘPOWEGO I RUCHU PO OKRĘGU Do określenia połoŜenia wybranego ciała lub układu ciał uŜywamy układów odniesienia.
Zwróćmy uwagę na to, Ŝe ruch tego samego ciała widziany z róŜnych układów odniesienia moŜe być róŜny. W szczególności moŜna wybrać taki układ odniesienia, w którym ciało nie porusza się. Oznacza to, Ŝe ruch jest pojęciem względnym.
Ponadto, w naszych rozwaŜaniach będziemy posługiwać się pojęciem punktu materialnego: Punkt materialny jest to punktowy model rzeczywistego ciała obdarzony masą, którego rozmiary moŜna zaniedbać.

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
6
Rzeczywiste ciała mają zawsze skończoną objętość, ale dopóki rozpatrujemy ich ruch postępowy (ciała nie obracają się, ani nie wykonują drgań) to z dobrym przybliŜeniem moŜemy je traktować jako punkty materialne. To przybliŜenie moŜe być z powodzeniem stosowane do opisu ruchu obiektów o róŜnej wielkości, zarówno "małych" cząsteczek, jak i "duŜych" planet.
1.2.1. Ruch postępowy (liniowy) Jest to ruch wzdłuŜ linii prostej (1 stopień swobody=1DOF).
JeŜeli ciało porusza się ruchem jednostajnym (ze stałą prędkością) i jeŜeli w pewnej chwili t0 znajdowało się w połoŜeniu x0 to po czasie t znajdzie się w połoŜeniu x danym wzorem:
( ) ( )00 ttvxtx −⋅+= (1)
Dwa przykłady zaleŜności między połoŜeniem x i czasem t pokazano na rysunku poniŜej dla dwóch ciał (np. pojazdów). Jak wynika z powyŜszego wzoru nachylenie wykresu x(t) przedstawia prędkość danego ciała. RóŜne nachylenia wykresów x(t) odpowiadają więc róŜnym prędkościom. Prędkość v (wektor) moŜe być dodatnia albo ujemna; jej znak wskazuje kierunek ruchu. Wektor v dodatni - ruch w kierunku rosnących x, ujemny to ruch w kierunku malejących x.
Rysunek 1. Przykład ruchu postępowego. Jednowymiarowy ruch mierzony względem startu drugiego (2) ciała. Pomimo, Ŝe w chwili początkowej (t=0s) pierwsze ciało było dwa metry za drugim, zdąŜyło go wyprzedzić (miało większą prędkość) i jako pierwsze dotarło do mety (ośmiometrowej).
Prędkość definiujemy jako zmianę połoŜenia ciała w jednostce czasu. W kinematyce rozróŜnia się pomiędzy prędkością średnią a prędkością chwilową.
Gdy samochód przyspiesza lub hamuje to wskazania prędkościomierza zmieniają się i nie moŜemy mówić o "jednej" stałej prędkości. Prędkość zmienia się i w kaŜdej chwili jest inna. Ograniczając się do bardzo małych wartości róŜnic x–x0=∆x) czyli równieŜ bardzo małego przedziału czasu ∆t=t–t0 (chwili). Prędkość chwilową w punkcie x otrzymamy gdy nasze przedziały czasowe ∆t dąŜą do zera (małe odstępy czasu):
dt
ds
t
sv
def
tch lim
0. =
∆∆=
→∆ ( 2)
Jak widzimy prędkość chwilowa jest z definicji pierwszą pochodną drogi po czasie.
Przy szacowaniu czasu dojazdu do wybranej miejscowości często nie jesteśmy w stanie przewidzieć wszystkich parametrów podróŜy wpływających na prędkość takich jak natęŜenie ruchu, konieczność ograniczenia prędkości w terenie zabudowanym itp. Posługujemy się wtedy pojęciem prędkości średniej:
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
7
Prędkość średnia – stosunek przyrostu drogi do przyrostu czasu (czasami stosunek całkowitej drogi do całkowitego czasu):
pk
pk
tt
ss
t
sv
−−
=∆∆=śr. (3)
gdzie indeksami k i p oznaczono stany końcowe i początkowe ruchu.
Przyspieszenie. Przyspieszeniem nazywamy tempo zmiany prędkości. RozróŜnia się pomiędzy przyspieszeniem chwilowym i średnim.
Przyspieszenie chwilowe jest pierwszą pochodną prędkości po czasie (drugą pochodną drogi po czasie):
2
2
0. lim
dt
sd
dt
dv
t
va
def
tch ==
∆∆=
→∆
( 4)
Prędkość średnia dotyczy skończonych przedziałów i wyraŜa się wzorem:
pk
pk
tt
vv
t
va
−−
=∆∆=śr. (5)
Ruch jednostajny, to ruch ze stałą prędkością. v = const. i zerowym przyspieszeniem: a=0. Wartość drogi w danym momencie t moŜna obliczyć ze wzoru (1-1), otrzymując:
( ) tvsts ⋅+= 0 , gdzie s0 jest początkową wartością przebytej drogi.
Ruch jednostajnie zmienny. Ruch ten, ze względu na niezerową wartość współczynnika przyspieszenia, dzielimy na ruch jednostajnie przyspieszony (a>0) i ruch jednostajnie opóźniony (a<0). Stąd, jeŜeli a≠0, wartość prędkości w dowolnej chwili czasu t obliczyć moŜemy ze wzoru (1-2): ( ) tavtv ⋅+= 0 , natomiast drogę obliczymy całkując równanie (1-1):
( ) 200 2
1tatvsts ⋅+⋅+= , gdzie s0 i v0 są początkowymi wartościami drogi i prędkości. W
poniŜszej tabeli znajduje się podsumowanie i zestawienie wzorów na przyspieszenie, prędkość i drogę dla róŜnych typów ruchów:
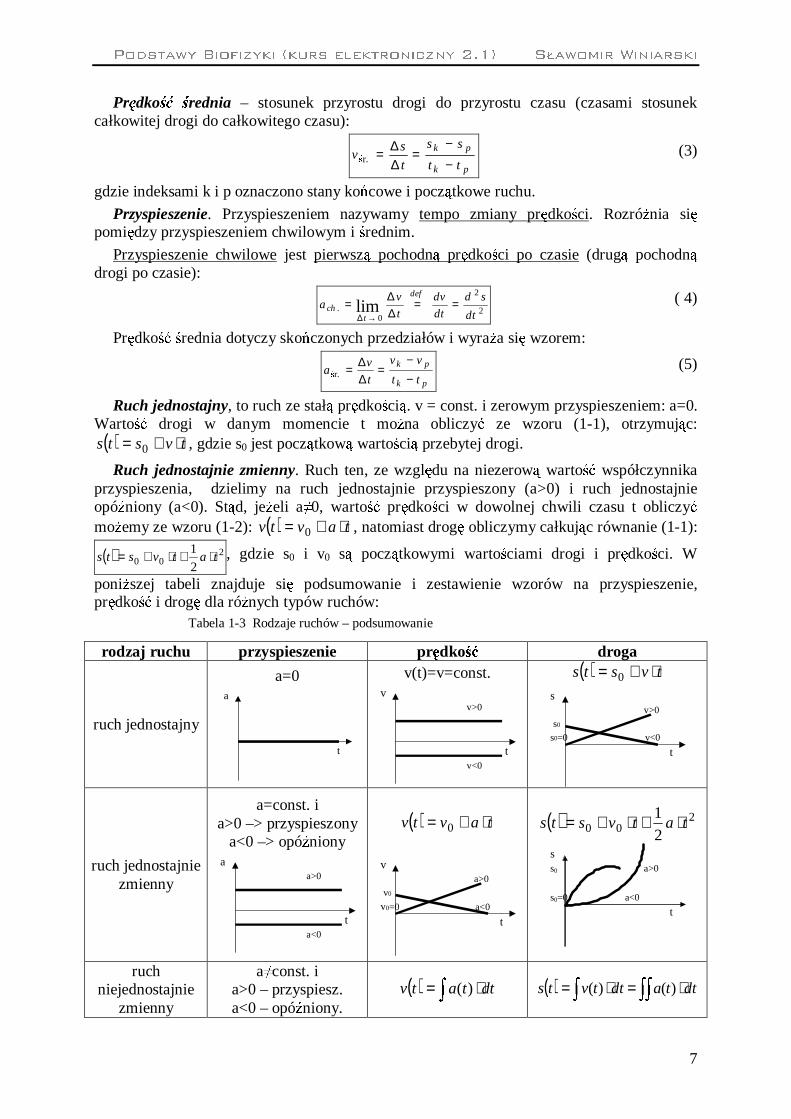
Tabela 1-3 Rodzaje ruchów – podsumowanie
rodzaj ruchu przyspieszenie prędkość droga
ruch jednostajny
a=0 a
t
v(t)=v=const. v
v>0
tv<0
( ) tvsts ⋅+= 0
s v>0
s0
s0=0 v<0
t
ruch jednostajnie zmienny
a=const. i a>0 –> przyspieszony
a<0 –> opóźniony a
a>0
ta<0
( ) tavtv ⋅+= 0
v
a>0
v0
v0=0 a<0
t
( ) 200 2
1tatvsts ⋅+⋅+=
s
s0 a>0
s0=0 a<0
t
ruch niejednostajnie
zmienny
a≠const. i a>0 – przyspiesz. a<0 – opóźniony.
( ) ∫ ⋅= dttatv )( ( ) ∫ ∫∫ ⋅=⋅= dttadttvts )()(

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
8
1.2.2. Rzut ukośny. Piłka kopnięta przez piłkarza lub rzucona przez koszykarza, oszczep lub dysk rzucony
przez atletę czy wreszcie pocisk wystrzelony z działa poruszają się poruszają się po torze krzywoliniowym. Naszym celem jest znalezienie prędkości i połoŜenia rzuconego ciała w dowolnej chwili, opisanie toru ruchu i wyznaczenie zasięgu rzutu.
JeŜeli pominiemy opory powietrza to ruch odbywa się ze stałym przyspieszeniem grawitacyjnym g (g≈10m/s2). MoŜemy więc zastosować równania dla ruchu jednostajnie zmiennego. PoniewaŜ przyspieszenie jest skierowane "w dół" wygodnie jest wybrać układ współrzędnych tak, Ŝe x będzie współrzędną poziomą, a y pionową. Ponadto, przyjmijmy, Ŝe początek układu współrzędnych pokrywa się z punktem, z którego wylatuje ciało oraz, Ŝe prędkość w chwili początkowej t = 0 jest równa v0 i tworzy kąt α z dodatnim kierunkiem osi x (rysunek poniŜej).
ZauwaŜmy, Ŝe rzut (np. pokazany z prawej strony rzut piłką tenisową) rozłoŜyć moŜemy
na dwa ruchy: ruch jednostajny względem osi podłuŜnej (x) oraz ruch jednostajnie zmienny względem osi pionowej (y). Dla składowych poziomej i pionowej prędkości zapisać moŜemy:
gtvgtvtv
vvtv
xy
xx
−=−===
ααsin)(
cos)(
00
00 ( 6)
a znając prędkości obliczyć moŜemy przemieszczenia odpowiednio poziome i pionowe:
20
20
0
2
1sin
2
1)(
cos)(
gttvgttvty
tvtx
x −⋅=−=
⋅=
α
α (7)
Sprawdźmy teraz po jakim torze porusza się nasz obiekt tzn. znajdźmy równanie krzywej y(x). Równanie y(x) moŜemy obliczyć eliminując czas t z tych równań. Z zaleŜności x(t) obliczamy t, a następnie wstawiamy do równania y(t), które przyjmuje postać
222
0 cos2tg)( x
v
gxxy ⋅−⋅=
αα ( 8)
Jest to parabola z ramionami skierowanymi w dół (rysunek poniŜej).
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
9
Z powyŜszych równań łatwo pokazać, Ŝe:
a) maksymalna wysokość, na jaką wzniesie się ciało wynosi:
g
v
g
vh
y
2
sin
2
220
2
maxθ
== (9)
b) całkowity czas ruchu:
g
v
g
vt
y θsin22 0⋅=⋅= (10)
c) zasięg rzutu (maksymalny dystans):
g
v
g
vvtvz x
)2sin(sin2cos
200
0θθ
θ =⋅== (11)
PowyŜsze wzory przydatne są do określenia zasięgu, oraz maksymalnej wysokości rzutów w lekkoatletyce.
1.2.3. Ruch obrotowy. RozwaŜać będziemy ciało poruszające się ze stałą prędkością (liniową) po okręgu o
promieniu R. Prędkość kątowa (obrotowa) zdefiniowana jest jako zmiana kąta do zmiany czasu.
Prędkość kątowa średnia wyraŜa się wzorem:
t∆∆= αωśr (12)
natomiast prędkość kątowa chwilowa wzorem:
dt
dαω =ch (13)
i jak widzimy jest to pierwsza pochodna kąta po czasie.
Na zasadzie analogii pomiędzy ruchem obrotowym i liniowym zauwaŜymy, Ŝe przyspieszenie chwilowe kątowe jest pierwszą pochodną prędkości kątowej po czasie:
dt
dch
ωε = (14)
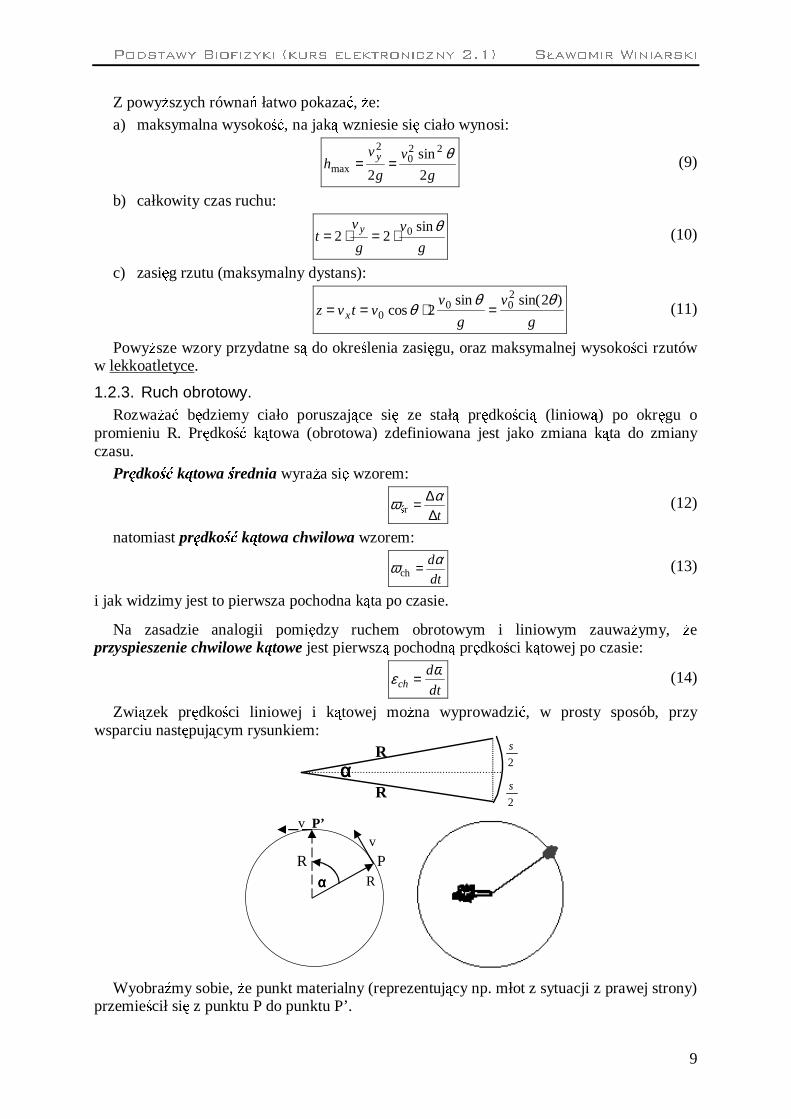
Związek prędkości liniowej i kątowej moŜna wyprowadzić, w prosty sposób, przy wsparciu następującym rysunkiem:
v P’v
R P αααα R
Wyobraźmy sobie, Ŝe punkt materialny (reprezentujący np. młot z sytuacji z prawej strony)
przemieścił się z punktu P do punktu P’.
R 2
s
R 2
sαααα
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
10
ZałóŜmy równieŜ, Ŝe przemieszczenie s było nieskończenie małe (rysunek).
Prowadząc dwusieczną kąta α obliczmy sinus α/2 powstałego w ten sposób trójkąta
prostokątnego: R
s
R
s
22
2sin ==α .
Skorzystajmy z tego, Ŝe kąt α jest nieskończenie małym kątem (dla małych kątów sinz≈z), dostaniemy:
R
s
222sin =≈ αα , a stąd: s= α.R.
Przekształcając dalej moŜemy otrzymać związek pomiędzy prędkością liniową a kątową:
Rv ⋅= ω (15)
oraz pomiędzy przyspieszeniem liniowym a kątowym:
Ra ⋅= ε (16)
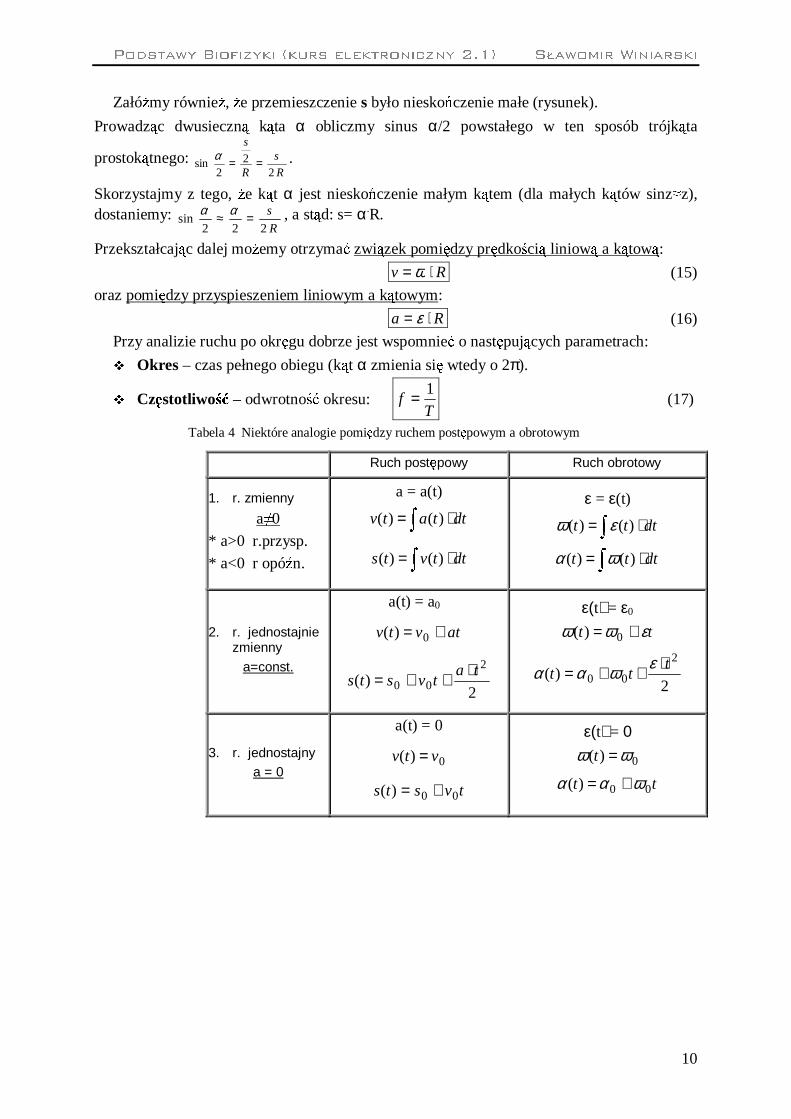
Przy analizie ruchu po okręgu dobrze jest wspomnieć o następujących parametrach: Okres – czas pełnego obiegu (kąt α zmienia się wtedy o 2π). Częstotliwość – odwrotność okresu: T
f1= (17)
Tabela 4 Niektóre analogie pomiędzy ruchem postępowym a obrotowym
Ruch postępowy Ruch obrotowy
1. r. zmienny a≠0
* a>0 r.przysp.
* a<0 r opóźn.
a = a(t) ∫ ⋅= dttatv )()( ∫ ⋅= dttvts )()(
ε = ε(t) ∫ ⋅= dttt )()( εω ∫ ⋅= dttt )()( ωα
2. r. jednostajnie zmienny
a=const.
a(t) = a0
atvtv += 0)(
2)(
2
00ta
tvsts⋅++=
ε(t) = ε0
tt εωω += 0)(
2)(
2
00t
tt⋅++= εωαα
3. r. jednostajny a = 0
a(t) = 0
0)( vtv =
tvsts 00)( +=
ε(t) = 0
0)( ωω =t
tt 00)( ωαα +=
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
11
2. DYNAMIKA RUCHU PROSTOLINIOWEGO
Dynamika zajmuje się opisem ruchu ciał pod działaniem sił. Do tego celu słuŜą róŜne rodzaje równań ruchu w zaleŜności od modelu zastosowanego. WyróŜnia się dynamikę punktu materialnego, bryły sztywnej, aerodynamikę i hydrodynamikę. 2.1. ŚRODEK MASY
Dotychczas przedmioty traktowaliśmy jak punkty materialne, tzn. obdarzone masą cząstki bezwymiarowe (o zerowej objętości) co wystarczało w przypadku ruchu postępowego ciał bo ruch jednego punktu odzwierciedlał ruch całego ciała. Jednak rzeczywiste ciała są układami ogromnej liczby atomów, a ich ruch moŜe być bardzo skomplikowany. Ciało moŜe wirować lub drgać, w trakcie ruchu cząstki mogą zmieniać swoje wzajemne połoŜenie. Przykład takiego ruchu jest przedstawiony na rysunku-animacji poniŜej.
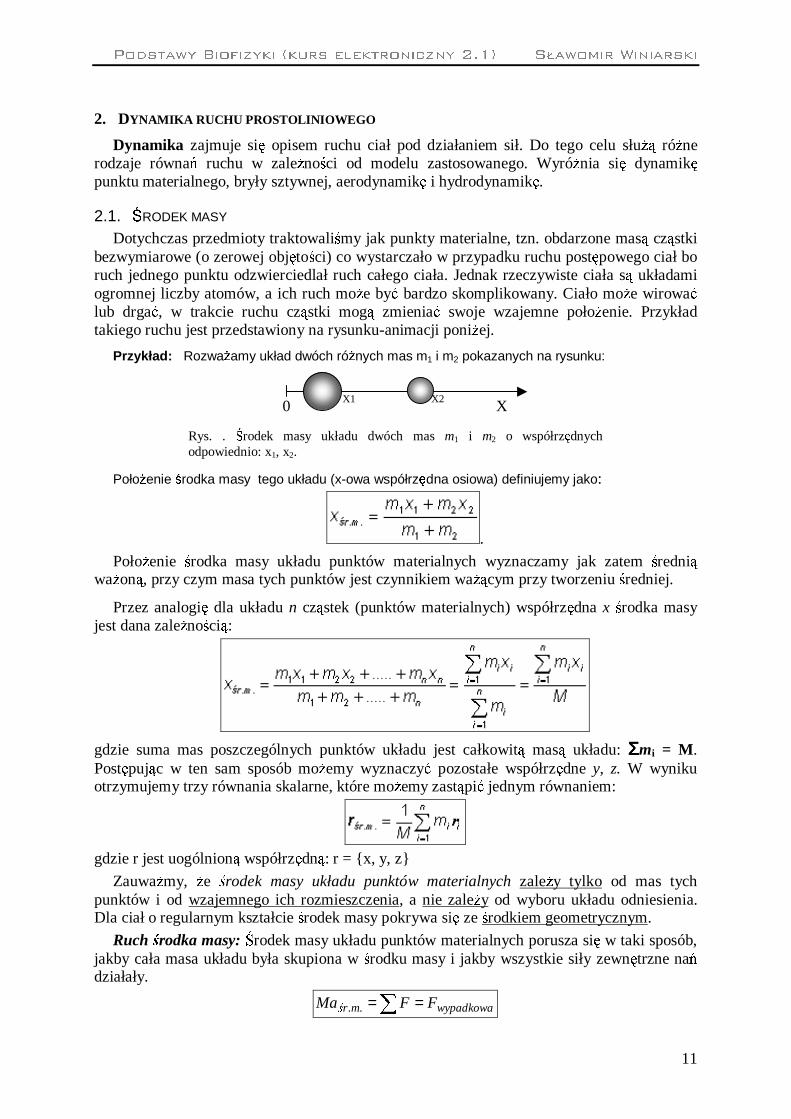
Przykład: RozwaŜamy układ dwóch róŜnych mas m1 i m2 pokazanych na rysunku:
0 X1
X2
X
Rys. . Środek masy układu dwóch mas m1 i m2 o współrzędnych odpowiednio: x1, x2.
PołoŜenie środka masy tego układu (x-owa współrzędna osiowa) definiujemy jako:
.
PołoŜenie środka masy układu punktów materialnych wyznaczamy jak zatem średnią waŜoną, przy czym masa tych punktów jest czynnikiem waŜącym przy tworzeniu średniej.
Przez analogię dla układu n cząstek (punktów materialnych) współrzędna x środka masy jest dana zaleŜnością:
gdzie suma mas poszczególnych punktów układu jest całkowitą masą układu: ΣΣΣΣmi = M. Postępując w ten sam sposób moŜemy wyznaczyć pozostałe współrzędne y, z. W wyniku otrzymujemy trzy równania skalarne, które moŜemy zastąpić jednym równaniem:
gdzie r jest uogólnioną współrzędną: r = x, y, z
ZauwaŜmy, Ŝe środek masy układu punktów materialnych zaleŜy tylko od mas tych punktów i od wzajemnego ich rozmieszczenia, a nie zaleŜy od wyboru układu odniesienia. Dla ciał o regularnym kształcie środek masy pokrywa się ze środkiem geometrycznym.
Ruch środka masy: Środek masy układu punktów materialnych porusza się w taki sposób, jakby cała masa układu była skupiona w środku masy i jakby wszystkie siły zewnętrzne nań działały.
wypadkowamśr FFMa ==∑..

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
12
Z twierdzenia o ruchu środka masy wynika, Ŝe nawet ciała materialne będące układami złoŜonymi z duŜej liczby punktów materialnych moŜemy w pewnych sytuacjach traktować jako pojedynczy punkt materialny. Tym punktem jest środek masy.
To twierdzenie obowiązuje dla kaŜdego układu punktów materialnych. W szczególności układ moŜe być ciałem o budowie ciągłej (np. ciało stałe). Wtedy przy obliczeniach środka
masy sumowanie Σ zastępujemy całkowaniem ∫. Układ moŜe teŜ być zbiorem cząstek, w którym występują wszystkie rodzaje ruchu wewnętrznego. Pojęcie środka masy jest bardzo uŜyteczne np. do obliczania energii kinetycznej cząsteczek, wypadkowej siły, pędu, itp.
2.2. PĘD PUNKTU MATERIALNEGO. Jest to iloczyn masy tego punktu oraz jego prędkości. Podobnie jak prędkość pęd jest
jednostką wektorową (posiada wartość, kierunek i zwrot).
vmprr ⋅= (18)
2.3. ZASADY DYNAMIKI NEWTONA1 Trzy podstawowe prawa fizyczne mechaniki, których treść jest następująca:
1. JeŜeli na punkt materialny (p.m.) nie działa siła (lub działające siły równowaŜą się), to ciało to spoczywa lub porusza się ruchem jednostajnym prostoliniowym.
2. JeŜeli na punkt materialny działa niezerowa siła, to ciało porusza się ruchem przyspieszonym (lub opóźnionym). Przyspieszenie ciała jest wprost proporcjonalne do siły zgodnie ze wzorem: amF ⋅= , (19) gdzie stała proporcjonalności m jest masą przyspieszanego p.m.
3. JeŜeli jeden punkt materialny działa na drugi p.m. siłą F1, to ten drugi działa na pierwszy z tą samą siłą ale o przeciwnym zwrocie: F2 = –F1.
Znana jest jeszcze inna postać drugiej zasady dynamiki. Przekształćmy równanie F=ma.
Otrzymamy: dt
dp
dt
mvd
dt
dvmamF ==⋅=⋅= )(
, przy załoŜeniu o stabilności masy w czasie.
Czyli: dt
dpF = (20)
2.4. ZASADA ZACHOWANIA PĘDU. JeŜeli na układ ciał nie działają siły zewnętrzne (F=0) (lub się one równowaŜą), to w myśl
drugiej zasady dynamiki: 0=dt
dp , a to implikuje, Ŝe dp=0 czyli pęd układu pozostaje stały.
const.p to,0 jezeli ==F (21)
Analogicznie posługując się zasadą zachowania pędu moŜna wytłumaczyć na przykład zjawisko odrzutu występujące przy strzelaniu z broni palnej. Zjawisko odrzutu ma jednak waŜne praktyczne znaczenie. Zostało wykorzystane w silnikach odrzutowych i rakietowych, w których wyrzucane spaliny nadają samolotowi (rakiecie) przeciwnie skierowany pęd. Zjawisko to jednak róŜni się od opisanych powyŜej, bo w przeciwieństwie do układów gdzie masa elementów składowych pozostawała stała masa wyrzucanych spalin i masa rakiety zmieniają się.
1 Sir Isaac Newton (1643-1727)
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
13
Wiemy juŜ, Ŝe jeŜeli wypadkowa sił zewnętrznych działających na układ jest równa zeru to spełniona jest zasada zachowania pędu. W takim układzie mogą jednak działać siły wewnętrzne, na przykład siły występujące przy zderzeniach między cząsteczkami gazu. I właśnie dlatego moŜemy skorzystać z zasady zachowania pędu do opisu zderzeń.
2.5. PRACA I ENERGIA Znajomość zagadnień związanych z szeroko rozumianym pojęciem energii jest
konieczna dla wszelkich rozwaŜań zarówno technologicznych, ekonomicznych, ekologicznych jak i społecznych. śeby się o tym przekonać wystarczy sprawdzić jak istotną pozycją w budŜecie domowym stanowią wydatki związane z zapotrzebowaniem na energię (zakupy Ŝywności, opłaty za prąd, gaz, ogrzewanie czy paliwo do samochodu). Z energią związana jest najwaŜniejsza chyba zasada całej fizyki - zasada zachowania energii. Nakłada ona sztywne granice na przetwarzanie energii i jej wykorzystanie. Do zasady tej będziemy się odwoływali wielokrotnie w kolejnych rozdziałach dotyczących róŜnych zagadnień fizyki. W mechanice zasada zachowania energii pozwala obliczać w bardzo prosty sposób ruch ciał, stanowi alternatywę do stosowania zasad dynamiki Newtona.
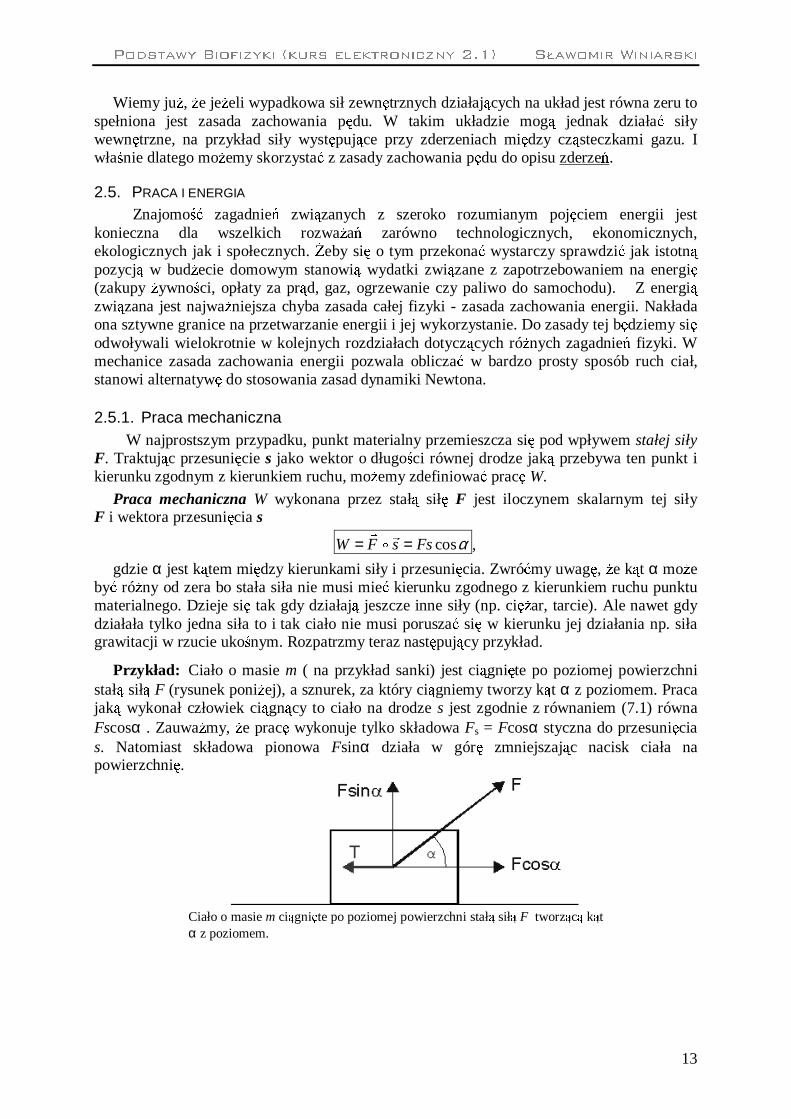
2.5.1. Praca mechaniczna W najprostszym przypadku, punkt materialny przemieszcza się pod wpływem stałej siły
F. Traktując przesunięcie s jako wektor o długości równej drodze jaką przebywa ten punkt i kierunku zgodnym z kierunkiem ruchu, moŜemy zdefiniować pracę W.
Praca mechaniczna W wykonana przez stałą siłę F jest iloczynem skalarnym tej siły F i wektora przesunięcia s
αcosFssFW ==ror
,
gdzie α jest kątem między kierunkami siły i przesunięcia. Zwróćmy uwagę, Ŝe kąt α moŜe być róŜny od zera bo stała siła nie musi mieć kierunku zgodnego z kierunkiem ruchu punktu materialnego. Dzieje się tak gdy działają jeszcze inne siły (np. cięŜar, tarcie). Ale nawet gdy działała tylko jedna siła to i tak ciało nie musi poruszać się w kierunku jej działania np. siła grawitacji w rzucie ukośnym. Rozpatrzmy teraz następujący przykład.
Przykład: Ciało o masie m ( na przykład sanki) jest ciągnięte po poziomej powierzchni stałą siłą F (rysunek poniŜej), a sznurek, za który ciągniemy tworzy kąt α z poziomem. Praca jaką wykonał człowiek ciągnący to ciało na drodze s jest zgodnie z równaniem (7.1) równa Fscosα . ZauwaŜmy, Ŝe pracę wykonuje tylko składowa Fs = Fcosα styczna do przesunięcia s. Natomiast składowa pionowa Fsinα działa w górę zmniejszając nacisk ciała na powierzchnię.
Ciało o masie m ciągnięte po poziomej powierzchni stałą siłą F tworzącą kąt α z poziomem.

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
14
Praca moŜe przyjmować zarówno wartości dodatnie gdy α < 90°, jak i ujemne gdy α > 90°. W omawianym przykładzie, poza siłą ciągnącą ciało, działa jeszcze siła tarcia kinetycznego T (rysunek 7.1) przeciwstawiająca się ruchowi (α = 180°). Praca wykonana przez siłę tarcia jest ujemna W = T⋅⋅⋅⋅ s = Ts cos180° = -Ts. W szczególności praca moŜe być równa zeru, gdy kierunek siły jest prostopadły do kierunku przesunięcia (α = 90°, cos90° = 0).
Przykładem moŜe być praca dla siły dośrodkowej. Przyspieszenie dośrodkowe jest prostopadłe do toru więc siła dośrodkowa nie wykonuje pracy. Rozpatrzmy jeszcze raz powyŜszy przykład ale w sytuacji gdy człowiek ciągnący ciało porusza się ze stałą prędkością. Z pierwszej zasady dynamiki wynika, Ŝe wtedy Fwyp = 0. W kierunku poziomym Fwyp = Fcosa − T = 0, zatem "dodatnia" praca wykonana przez człowieka jest równa co do wartości bezwzględnej "ujemnej" pracy wykonanej przez siłę tarcia.
2.5.2. Energia potencjalna Przy podnoszeniu w górę (ze stałą prędkością) ciała o masie m na wysokość h zauwaŜmy, Ŝe w trakcie podnoszenia ciała człowiek działa siłą F równą cięŜarowi ale przeciwnie
skierowaną, więc "dodatnia" praca W = mgh wykonana na drodze h przez siłę F (człowieka) jest równa co do wartości "ujemnej" pracy wykonanej przez siłę cięŜkości.
Pracę tą nazywamy energią potencjalną Ep. Ep=mgh. (22)
Poprzez związek energii potencjalnej z wysokością, moŜemy stwierdzić, Ŝe energia potencjalna, to energia ciała na jakiejś wysokości.
2.5.3. Energia kinetyczna Rozpatrzmy jeszcze raz ruch ciała pod wpływem stałej, niezrównowaŜonej siły F i
obliczmy pracę jaką wykonuje ona na drodze s. Stałość siły oznacza, Ŝe ruch odbywa się ze stałym przyspieszeniem a. Zakładamy ponadto, Ŝe kierunek siły F i przyspieszenia a pokrywa się z kierunkiem przesunięcia s. Dla ruchu jednostajnie przyspieszonego moŜemy napisać:
tsatvv
attvs
2
v-v i
t
v-va 2
00
0
2
0 ==+=
+= (23)
Wykonana praca jest zatem równa:
222
v-v
t
v-v 20
200 mvmv
tmsmaFsW −==⋅== (24)
i jest równa przyrostowi tzw. energii kinetycznej: W = ∆Ek.
Energią kinetyczną Ek nazywamy połowę iloczynu masy ciała i kwadratu prędkości ciała o masie m. Energia kinetyczna jest energią ciała w ruchu.
2
2mvEk = (25)
Z twierdzenia o pracy i energii wynika, Ŝe jednostki pracy i energii są takie same.
Jednostki: Jednostką pracy i energii jest w układzie SI dŜul (J); 1J = 1N·m. W fizyce atomowej powszechnie uŜywa się jednostki elektronowolt (eV); 1eV = 1.6·10-19 J.
2.5.4. Moc Z punktu widzenia zastosowań praktycznych często istotnym jest nie to ile energii moŜna
uzyskać ze źródła ale to jak szybko moŜna ją uzyskać (zamienić w uŜyteczną postać).

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
15
Na przykład, waŜnym parametrem samochodu, istotnym przy wyprzedzaniu, jest to jak szybko samochód przyspiesza tzn. jak szybko silnik wykonuje pracę związaną z rozpędzaniem samochodu. Inny przykład to, gdy chcemy zlecić komuś pracę do wykonania. Bierzemy wtedy pod uwagę nie tylko koszty ale i czas wykonania zlecenia (pracy).
Moc definiujemy jako ilość wykonanej pracy (lub przekazanej energii) do czasu w jakim została ona wykonana (moc mechaniczna średnia).
t
WPsr ∆
∆=. (26)
Moc chwilowa określa natomiast szybkość wykonywania pracy, bo jest pochodną pracy po czasie:
dt
dWPchw =.
(27)
Moc jest parametrem, który mierzy takŜe tempo przemiany (przekazywania) energii.
Praca obliczona dla stałej siły F przyjmuje dodatkową postać: P = W / t = F . s / t = F . v
P = F . v. (28)
Jednostką mocy w układzie SI jest wat (W); 1 W = 1 J/ s. Dla celów praktycznych powszechnie stosowaną jednostką mocy jest kilowat (kW), a jednostką energii elektrycznej (iloczyn mocy i czasu) jest kilowatogodzina (kWh).
2.5.5. Zasada zachowania energii Zasada zachowania energii mechanicznej mówi, Ŝe dla ciała podlegającego działaniu siły
zachowawczej, suma energii kinetycznej i potencjalnej jest stała.
Em = Ek + Ep = constans (29)
Podaliśmy zasadę zachowania energii mechanicznej dla pojedynczego ciała, ale ta zasada jest bardziej ogólna i obowiązuje dla wszystkich odosobnionych układów ciał. Układy odosobnione to takie, na które nie działają siły zewnętrzne (spoza układu). W takich układach suma energii kinetycznych i potencjalnych wszystkich ciał pozostaje stała bez względu na oddziaływania w nich zachodzące.
Siła tarcia zmienia energię mechaniczną układu (zmniejsza ją bo tarcie jest siłą rozpraszającą). Pozostaje wyjaśnić co stało się ze "straconą" energią mechaniczną. Okazuje się, Ŝe zostaje ona przekształcona na energię wewnętrzną U, która objawia się wzrostem temperatury ciała i otoczenia. Zmiana energii wewnętrznej ∆U jest równa rozproszonej energii mechanicznej.
Energia całkowita, tj. suma energii kinetycznej, energii potencjalnej i energii wewnętrznej w układzie odosobnionym nie zmienia się. Mamy więc zasadę zachowania energii całkowitej. Inaczej mówiąc energia moŜe być przekształcana z jednej formy w inną, ale nie moŜe być wytwarzana ani niszczona; energia całkowita jest wielkością stałą.
Ec = Ek + Ep + ∆U = constans. (30)
2.6. DYNAMIKA BRYŁY SZTYWNEJ Bryła sztywna jest to wyidealizowany obiekt fizyczny, w którym odległości pomiędzy jego
punktami nie ulegają zmianie.
Jak wynika z naszego codziennego doświadczenia w ruchu obrotowym waŜna jest nie tylko wartość siły, ale to gdzie i pod jakim kątem jest ona przyłoŜona. Na przykład, drzwi najłatwiej jest otworzyć przykładając siłę na ich zewnętrznej krawędzi i pod kątem prostym do płaszczyzny drzwi. Siła przyłoŜona wzdłuŜ płaszczyzny drzwi jak i siła przyłoŜona w miejscu zawiasów nie pozwalają na ich obrót.

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
16
2.6.1. Moment siły Dla ruchu obrotowego wielkością, która odgrywa rolę analogiczną do siły w ruchu
postępowym jest moment siły (tzw. moment obrotowy, skręcający) ΜΜΜΜ. JeŜeli siła F jest przyłoŜona w pewnym punkcie to moment siły ΜΜΜΜ względem tego punktu jest definiowany jako:
FrMrrr
×= (31)
gdzie wektor r reprezentuje połoŜenie punktu względem wybranego inercjalnego układu odniesienia. Moment siły jest wielkością wektorową, której:
a) wartość wynosi:
M = r.F.sin(α) = R.F. (32)
Wielkość R = r.sin(α) nazywamy ramieniem siły. (Z równania wynika, Ŝe tylko składowa siły prostopadła do ramienia F⊥ = Fsinθ wpływa na moment siły.)
b) kierunek jest prostopadły do wektora wodzącego r i wektora siły F (tzn. do płaszczyzny wyznaczonej przez r i F), a
c) zwrot określa reguła „śruby prawoskrętnej” (lub reguła „trzech palców”).
2.6.2. Moment pędu Zdefiniujmy teraz wielkość, która w ruchu obrotowym odgrywa rolę analogiczną do pędu.
Wielkość L nazywamy momentem pędu i definiujemy jako:
prLrrr
×= (33)
gdzie p jest pędem punktu materialnego, a r reprezentuje jego połoŜenie względem wybranego inercjalnego układu odniesienia. Sama wartość wektora L , z definicji iloczynu wektorowego wynosi:
L = r.p.sin(α). 34
Istnieje bezpośrednia zaleŜność pomiędzy momentem siły i momentem pędu. śeby ją wyprowadzić zróŜniczkujmy obie strony równania:
(35)
PoniewaŜ wektory v oraz p są zawsze równoległe to ich iloczyn wektorowy jest równy zeru. Otrzymujemy więc zaleŜność, która będzie inną postacią drugiej zasady dynamiki w ruchu obrotowym:
dt
LdM
rr= (36)
2.6.3. Zasady dynamiki Newtona dla ruchu obrotowego a) Drugie prawo dynamiki Newtona dla ruchu obrotowe go:
Wypadkowy moment siły działający na punkt materialny jest równy prędkości zmian momentu pędu. (równanie wyŜej)
Jest to sformułowanie drugiej zasadę dynamiki dla ruchu obrotowego. Równanie na M jest analogiczne do odpowiedniego równania na F dla ruchu postępowego.
Analogicznie moŜemy sformułować pierwszą zasadę dynamiki ruchu obrotowego: b) Pierwsze prawo dynamiki Newtona dla ruchu obrotow ego:

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
17
Ciało sztywne, na które nie działa moment siły pozostaje w spoczynku lub porusza się ruchem obrotowym jednostajnym.
c) Trzecie prawo dynamiki Newtona dla ruchu obrotowe go:
JeŜeli dwa ciała oddziałują wzajemnie, to moment siły z jakim działa ciało drugie na ciało pierwsze jest równy i przeciwnie skierowany do momentu siły, z jakim ciało pierwsze działa
na drugie.
2.6.4. Zachowanie momentu pędu Dla układu n cząstek moŜemy zsumować momenty sił działające na poszczególne punkty
materialne, otrzymując:
dt
LdM
wypadkowywypadkowy
rr= (37)
JeŜeli na układ nie działa zewnętrzny moment siły (lub wypadkowy moment sił zewnętrznych jest równy zeru) to całkowity moment pędu układu pozostaje stały:
gdy Mwypadkowy=0, to: L=constans. (38)
2.6.5. Moment bezwładności Większość ciał w przyrodzie to nie punkty materialne ale rozciągłe ciała sztywne.
Przeanalizujmy teraz ruch takiej bryły sztywnej obracającej się ze stałą prędkością kątową ω wokół stałej osi obrotu w układzie środka masy. ZauwaŜmy, Ŝe chociaŜ wszystkie punkty mają te samą prędkość kątową ω to punkty znajdujące się w róŜnych odległościach od osi obrotu mają róŜną prędkość liniową v. Prędkość i -tego punktu o masie ∆mi wynosi vi = r i ω gdzie r i jest odległością od osi obrotu.
Obliczamy teraz wartość momentu pędu L tego ciała:
(39)
Wielkość w nawiasie nazywamy momentem bezwładności I, który definiujemy jako:
(40) dla punktowego (tzw. dyskretnego) rozkładu masy, oraz dla rozkładu ciągłego:
(41)
Zwróćmy uwagę, Ŝe moment bezwładności (I) zaleŜy od masy oraz odległości do osi obrotu i określa sposób rozmieszczenia masy względem osi obrotu dla obracającego się ciała. MoŜemy teraz wyrazić moment pędu poprzez moment bezwładności:
(42)
a poniewaŜ zgodnie z równaniem M = dL /dt = d(I.ω)/dt = I . ε
M = I . εεεε. , (43)
gdzie M jest momentem siły, εεεε – przyspieszeniem kątowym. Obliczmy teraz energi ę kinetyczn ą obracaj ącego si ę ciała :
(44)
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
18
czyli: (45)
Zestawmy teraz odpowiednie wielkości obliczone dla ruchu obrotowego z ich odpowiednikami dla ruchu postępowego (tabela poniŜej).
Tabela 5. Zestawienie wielkości opisujących ruch postępowy i ruch obrotowy
Ruch postępowy Ruch obrotowy druga zasada dynamiki F = m . a M = I . εεεε
pęd / moment pędu
p = m . v L = I . ωωωω
inna postać drugiej zasady dynamiki dt
rr=
dt
LdM
rr=
energia kinetyczna 2
2mvEk =
2
2ωIEk =
Z tego porównania widać, Ŝe moment bezwładności I jest analogiczną wielkością do masy m w ruchu postępowym. Zwróćmy uwagę, Ŝe w przeciwieństwie do masy moment bezwładności zaleŜy od osi, wokół której obraca się ciało. Momenty bezwładności niektórych ciał sztywnych są podane w tabeli poniŜej:
Ciało moment bezwładno ści I Obręcz, pierścień o promieniu R, względem osi obręczy MR2
KrąŜek, walec względem osi walca ½ MR2 Pręt o długości L, względem osi symetrii prostopadłej do pręta 1/12 ML2
Pełna kula o promieniu R, względem średnicy 2/5 MR2 Czasza kulista o promieniu R, względem średnicy 2/3 MR2
Często do obliczania momentu bezwładności wygodnie jest posłuŜyć się twierdzeniem Steinera. Podaje ono zaleŜność pomiędzy momentem bezwładności I ciała względem danej osi, a momentem bezwładności I0 tego ciała względem osi przechodzącej przez jego środek masy (tzw. osi centralnej) i równoległej do pierwszej. Związek ten wyraŜa się zaleŜnością:
20 MdII += (46)
gdzie d jest odległością między osiami, a M jest masą obracającego się ciała.
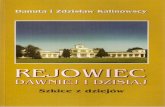
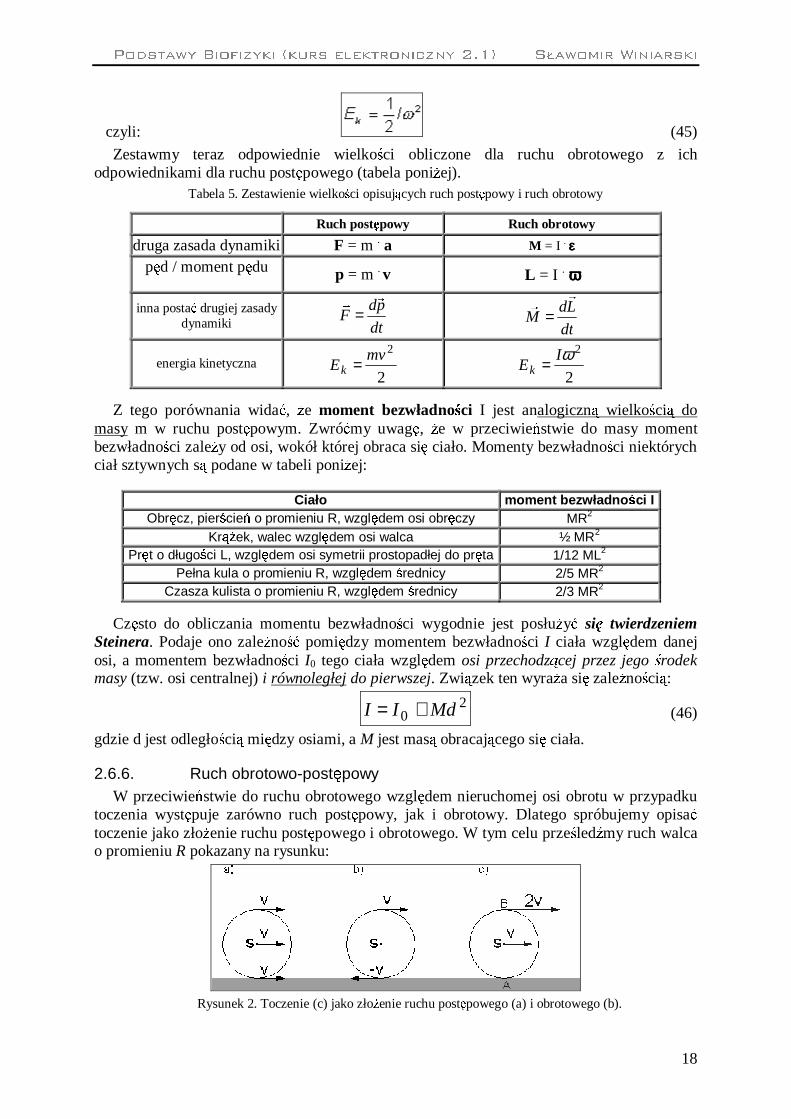
2.6.6. Ruch obrotowo-postępowy W przeciwieństwie do ruchu obrotowego względem nieruchomej osi obrotu w przypadku
toczenia występuje zarówno ruch postępowy, jak i obrotowy. Dlatego spróbujemy opisać toczenie jako złoŜenie ruchu postępowego i obrotowego. W tym celu prześledźmy ruch walca o promieniu R pokazany na rysunku:
Rysunek 2. Toczenie (c) jako złoŜenie ruchu postępowego (a) i obrotowego (b).

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
19
W ruchu postępowym, rysunek (a), wszystkie punkty poruszają się z takimi samymi prędkościami, natomiast w ruchu obrotowym wokół środka masy S, rysunek (b), przeciwległe punkty poruszają się z przeciwnymi prędkościami, a środek jest nieruchomy. Na rysunku (c) pokazano wynik złoŜenia (sumowania) odpowiednich wektorów z rysunków (a) i (b). Zwróćmy uwagę, Ŝe podstawa walca (punkt A styczności z podłoŜem) w kaŜdej chwili spoczywa (prędkość chwilowa vA = 0). Natomiast prędkość liniowa punktów S i B jest proporcjonalna do ich odległości od punktu A (punkt B w odległości 2R ma prędkość dwukrotnie większą niŜ punkt S w odległości R). Jeszcze pełniej widać to na rysunku 11.6 gdzie narysowane są prędkości chwilowe kilku punktów na obwodzie toczącego się walca.
Rysunek 3. Toczenie się walca jako obrót wokół punktu A.
Widać, Ŝe prędkość kaŜdego z tych punktów jest prostopadła do linii łączącej ten punkt z podstawą A i proporcjonalna do odległości tego punktu od A. Takie zachowanie jest charakterystyczne dla ciała wykonującego ruch obrotowy względem nieruchomej osi. Oznacza to, Ŝe opisywany walec obraca się wokół punktu A, a co za tym idzie, Ŝe moŜemy toczenie opisywać równieŜ wyłącznie jako ruch obrotowy ale względem osi przechodzącej przez punkt A styczności z powierzchnią, po której toczy się ciało.
W celu zilustrowania równowaŜności obu opisów obliczymy teraz energię kinetyczną walca o masie m toczącego się z prędkością v. Najpierw potraktujemy toczenie jako złoŜenie ruchu postępowego i obrotowego względem środka masy. Energię kinetyczną obliczamy jako sumę energii ruchu postępowego i obrotowego:
(47)
Ruch ciała będący złoŜeniem ruchu postępowego środka masy i obrotowego względem osi przechodzącej przez środek masy jest równowaŜny ruchowi obrotowemu wokół osi przechodzącej przez punkt styczności ciała z powierzchnią, po której się ono toczy.

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
20
3. M ECHANIKA PŁYNÓW
Powszechnie przyjęty jest podział materii na ciała stałe i płyny. Pod pojęciem substancji, która moŜe płynąć rozumiemy zarówno ciecze jak i gazy. Płyny, w odróŜnieniu od ciał sztywnych, mających określony rozmiar i kształt, łatwo zmieniają swój kształt, a w przypadku gazów przyjmują objętość równą objętości naczynia. Mówimy, Ŝe płyny nie mają spręŜystości kształtu, a mają spręŜystość objętości. Dlatego rozwiązanie zagadnień z mechaniki płynów wymaga posługiwania się nowymi pojęciami takimi jak ciśnienie i gęstość. 3.1. CIŚNIENIE I GĘSTOŚĆ
RóŜnica w działaniu siły powierzchniowej na płyn i na ciało stałe jest związana z tym, Ŝe w cieczy siły występują tylko przy zmianie objętości, a nie jak w ciałach stałych przy ich deformacji (zmianie kształtu). W związku z tym w cieczy siła powierzchniowa, zwana siłą parcia, musi być zawsze prostopadła do powierzchni płynu podczas gdy w ciele stałym moŜe mieć dowolny kierunek. Spoczywający płyn nie moŜe równowaŜyć sił stycznych (warstwy płynu ślizgałyby się po sobie) i dlatego moŜe zmieniać kształt i płynąć. W związku z tym będziemy opisywać siłę działającą na płyn za pomocą ciśnienia p zdefiniowanego następująco:
Ciśnienie definiujemy jako: stosunek siły parcia (F) działającej na jednostkę powierzchni do wielkości tej powierzchni (S).
S
Fp
parcia= (48)
Ciśnienie jest wywierane zarówno na ścianki naczynia jak i na dowolne przekroje płynów zawsze prostopadle do tych ścianek i przekrojów.
Ciśnienie jest wielkością skalarną. Jednostką ciśnienia jest pascal (Pa); 1 Pa = 1 N/m2. Inne stosowane jednostki to bar (1 bar = 105 Pa), atmosfera (1 atm = 101325 Pa), milimetr słupka rtęci (760 mm Hg = 1atm).
Do opisu płynów stosujemy równieŜ pojęcie gęstości ρ wyraŜonej jako:
V
m
objetosc
masa ==ρ (49)
Gęstość płynów zaleŜy od wielu czynników takich jak temperatura, czy ciśnienie. W tablicy przedstawiony jest zakres gęstości spotykanych w przyrodzie:
Tabela 6. >Od najmniejszych do największych gęstości<.
Materiał ρρρρ [kg/m 3] przestrzeń międzygwiezdna 10−18 - 10−21
najlepsza próŜnia laboratoryjna 10−17 powietrze (1 atm 0°C) 1.3 powietrze (50 atm 0°C) 6.5
drewno 600-900 Lód (0°C) 917
Woda destylowana 998 Woda morska 1025
Ziemia: skorupa 2800 Ziemia: rdzeń 9500
Ziemia: wartość średnia 5520 białe karły 108 - 1015 jądro uranu 1017

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
21
3.1.1. Ciśnienie hydrostatyczne Równanie p = F/S opisywało ciśnienie wywierane przez płyn na powierzchnię, która go
ogranicza. MoŜemy takŜe mówić o ciśnieniu wewnętrznym płynu (tzw. ciśnienie hydrostatyczne). W tym celu rozpatrzmy element płynu w kształcie cienkiego dysku znajdującego się na głębokości h pod powierzchnią płynu pokazany na rysunku. Grubość dysku wynosi dh, a powierzchnia podstawy wynosi S.
Rysunek 4. Siły działające na element cieczy znajdujący się na głębokości h.
Masa takiego elementu wynosi ρSdh a jego cięŜar ρgSdh. Pamiętajmy, Ŝe siły działające na element są w kaŜdym punkcie prostopadłe do powierzchni. Siły poziome wywołane jedynie przez ciśnienie płynu równowaŜą się. Siły pionowe są wywoływane nie tylko przez ciśnienie płynu ale teŜ przez jego cięŜar. PoniewaŜ płyn jest nieruchomy więc wypadkowa siła działająca na element płynu jest równa zeru.
Ciśnienie hydrostatyczne zmienia się z głębokością płynu. Powodem jest cięŜar warstwy płynu leŜącej pomiędzy punktami, dla których mierzymy róŜnicę ciśnień. Wielkość ρg nazywamy cięŜarem właściwym płynu. Dla cieczy zazwyczaj ρ jest stałe (ciecze są praktycznie nieściśliwe) więc moŜemy obliczyć całkowite ciśnienie cieczy na głębokości h, otrzymując (wzór na całkowite ciśnienie hydrostatyczne na głębokości h):
hgρpp wody0cal.hydro. ⋅⋅+= (50)
gdzie p0 jest ciśnieniem na powierzchni cieczy (h=0). Zazwyczaj jest to ciśnienie atmosferyczne (przyjmuje się ciśnienie standardowe: p0=1013hPa) . Równanie powyŜsze nie tylko pokazuje, Ŝe ciśnienie rośnie wraz z głębokością ale teŜ, Ŝe jest jednakowe dla punktów o tej samej głębokości, a nie zaleŜy od kształtu naczynia (paradoks hydrostatyczny).
ZałoŜenie o stałej gęstości ρ nie jest jednak prawdziwe dla gazów gdy mamy do czynienia ze znaczną róŜnicą wysokości (np. gdy wznosimy się w atmosferze). Ciśnienie zmienia się wtedy znacznie i zmienia się teŜ ρ.
3.1.2. Ciśnienie atmosferyczne. Do obliczenia całkowitego ciśnienia atmosferycznego na wysokości h (ponad poziomem
morza) stosować moŜemy następujący wzór:
hgphCpp powietrzaatmocal ⋅⋅−≅⋅−⋅= ρ00.. )exp( (51)
gdzie: po jest ciśnieniem standardowym, natomiast C=0,116km-1 jest stałą. Eksponenta exp(x), (lub ex) jest funkcją wykładniczą. Ze wzoru tego widzimy, Ŝe ciśnienie atmosferyczne maleje wykładniczo wraz z wysokością i z dobrym przybliŜeniem (dla małych wysokości) da się zastąpić funkcją liniową.
3.1.3. Prawo Pascala
Ciśnienie zewnętrzne wywierane na zamknięty płyn jest przekazywane niezmienione na kaŜdą część płynu oraz na ścianki naczynia. (rozchodzi się jednakowo we wszystkich
kierunkach przestrzeni)

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
22
Prawo to jest konsekwencją praw mechaniki płynów podobnie jak prawo Archimedesa.
3.1.4. Prawo Archimedesa Kiedy ciało jest zanurzone w całości lub częściowo w spoczywającym płynie to płyn ten
wywiera ciśnienie na kaŜdą, będącą z nim w kontakcie, część powierzchni ciała.
Wypadkowa siła jest skierowana ku górze i nazywa się siłą wyporu (lub siłą Archimedesa). Gdy przyjmiemy przykładowo, Ŝe w cieczy zostało zanurzone ciało w kształcie walca o powierzchni podstawy równej S (tak jak na rysunku) to wypadkowa siła działająca na to ciało jest związana z róŜnicą ciśnień na głębokościach h1 i h2 odpowiednio nad i pod walcem.
Rysunek 5. Walec o powierzchni podstawy S zanurzony w płynie.
Siła działająca na walec jest równa cięŜarowi cieczy wypartej przez ten walec. ZauwaŜmy, Ŝe ta siła nie zaleŜy od kształtu ciała, a tylko od jego objętości.
Podsumowując, prawo Archimedesa moŜna streścić zdaniem:
„Ciało w całości lub częściowo zanurzone w płynie jest wypierane ku górze siłą (wyporu) równą cięŜarowi wypartego przez to ciało płynu.” Siła wyporu natomiast zaleŜy od gęstości
płynu, oraz objętości części zanurzonej ciała:
gVgmF zanplynuplynuwyporu ⋅⋅=⋅= .ρ (52)
gdzie mp jest masą płynu, ρp. jego gęstością, natomiast Vz jest objętością części zanurzonej ciała.
Na kaŜde zanurzone w płynie ciało działają siła wyporu i siła cięŜkości. Dla ciała o masie m i objętości V całkowicie zanurzonego w płynie wypadkowa tych dwóch sił wynosi
)( cialaplynucialaplynuciezkosciwyporuwypadkowa VgVgVgFFF ρρρρ −=−=−= (53)
gdzie ρplynu jest gęstością płynu, a ρciala średnią gęstością ciała. Widzimy, Ŝe zwrot siły wypadkowej zaleŜy od róŜnicy gęstości płynu i ciała.
Na przykład ciało zanurzone w cieczy o gęstości ρρρρ < ρρρρ1 tonie, a dla gęstości ρρρρ > ρρρρ1 pływa częściowo zanurzone.
3.1.5. Ogólny opis przepływu płynów Przejdziemy teraz do opisu ruchu płynu czyli zajmiemy się dynamiką płynów. Znane są
dwa podejścia do opisu ruchu płynu. MoŜemy albo zająć się opisem ruchu poszczególnych cząsteczek płynu albo opisywać gęstość płynu i jego prędkość w kaŜdym punkcie przestrzeni w funkcji czasu.
Na wstępie poznamy ogólne pojęcia charakteryzujące przepływ.
• Przepływ moŜe być ustalony (laminarny ) lub nieustalony. Ruch płynu jest ustalony, gdy prędkość płynu v w dowolnie wybranym punkcie jest stała w czasie tzn. kaŜda cząsteczka przechodząca przez dany punkt zachowuje się tak samo. Warunki takie osiąga się przy niskich prędkościach przepływu.
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
23
• Przepływ moŜe być wirowy lub bezwirowy. Przepływ jest bezwirowy, gdy w Ŝadnym punkcie cząsteczka nie ma wypadkowej prędkości kątowej.
• Przepływ moŜe być ściśliwy lub nieściśliwy. Przepływ jest nieściśliwy gdy gęstość płynu jest stała. Zazwyczaj przepływ cieczy jest nieściśliwy. RównieŜ przepływ gazu moŜe być w pewnych warunkach nieściśliwy. Przykładem moŜe tu być ruch powietrza względem skrzydeł samolotu podczas lotu z prędkością mniejszą od prędkości dźwięku.
• Przepływ moŜe być lepki lub nielepki. Lepkość w ruchu płynów jest odpowiednikiem tarcia w ruchu ciał stałych. Charakteryzuje opór płynów przeciw płynięciu pod działaniem sił zewnętrznych. Lepkość jest istotną cechą wielu produktów na przykład smarów
ZałoŜenie: W naszych rozwaŜaniach ograniczymy się do przepływów ustalonych, bezwirowych, nieściśliwych i nielepkich !!!
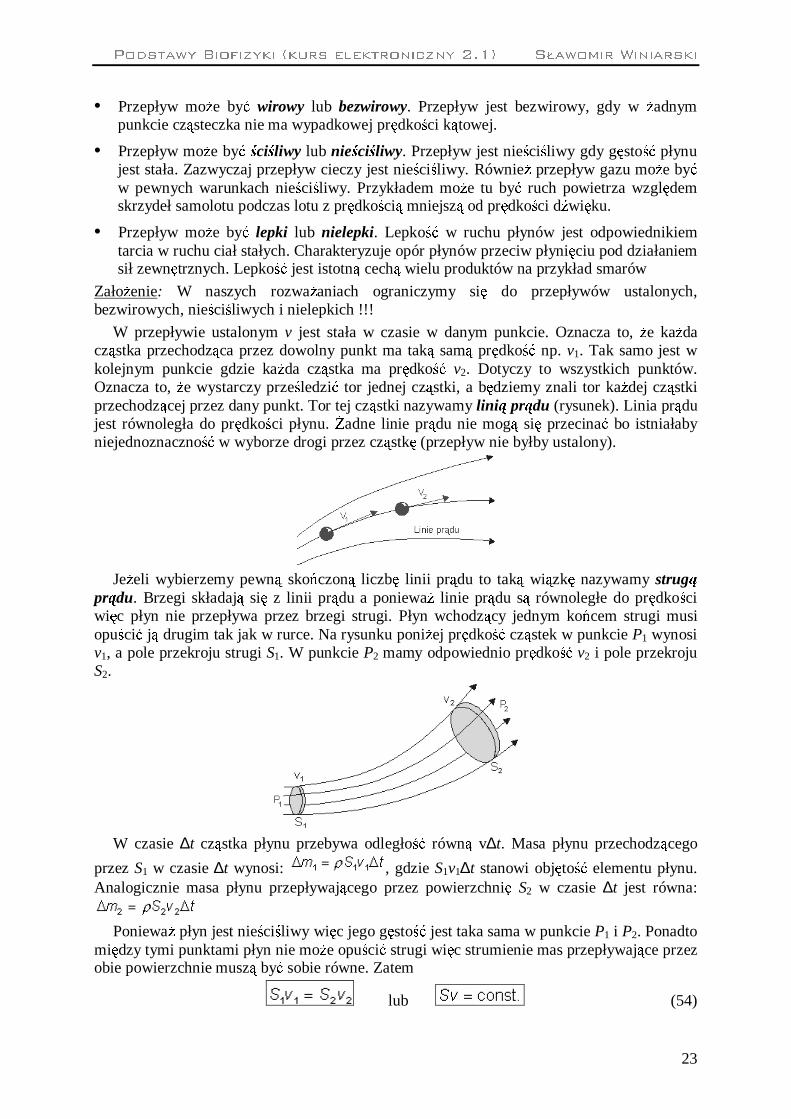
W przepływie ustalonym v jest stała w czasie w danym punkcie. Oznacza to, Ŝe kaŜda cząstka przechodząca przez dowolny punkt ma taką samą prędkość np. v1. Tak samo jest w kolejnym punkcie gdzie kaŜda cząstka ma prędkość v2. Dotyczy to wszystkich punktów. Oznacza to, Ŝe wystarczy prześledzić tor jednej cząstki, a będziemy znali tor kaŜdej cząstki przechodzącej przez dany punkt. Tor tej cząstki nazywamy lini ą prądu (rysunek). Linia prądu jest równoległa do prędkości płynu. śadne linie prądu nie mogą się przecinać bo istniałaby niejednoznaczność w wyborze drogi przez cząstkę (przepływ nie byłby ustalony).
JeŜeli wybierzemy pewną skończoną liczbę linii prądu to taką wiązkę nazywamy strugą
prądu. Brzegi składają się z linii prądu a poniewaŜ linie prądu są równoległe do prędkości więc płyn nie przepływa przez brzegi strugi. Płyn wchodzący jednym końcem strugi musi opuścić ją drugim tak jak w rurce. Na rysunku poniŜej prędkość cząstek w punkcie P1 wynosi v1, a pole przekroju strugi S1. W punkcie P2 mamy odpowiednio prędkość v2 i pole przekroju S2.
W czasie ∆t cząstka płynu przebywa odległość równą v∆t. Masa płynu przechodzącego
przez S1 w czasie ∆t wynosi: , gdzie S1v1∆t stanowi objętość elementu płynu. Analogicznie masa płynu przepływającego przez powierzchnię S2 w czasie ∆t jest równa:
PoniewaŜ płyn jest nieściśliwy wi ęc jego gęstość jest taka sama w punkcie P1 i P2. Ponadto
między tymi punktami płyn nie moŜe opuścić strugi więc strumienie mas przepływające przez obie powierzchnie muszą być sobie równe. Zatem
lub (54)

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
24
Otrzymany związek nosi nazwę równania ciągłości (lub prawa przepływu strugi). Wynika z niego między innymi, Ŝe
Prędkość płynu nieściśliwego przy ustalonym przepływie jest odwrotnie proporcjonalna do pola przekroju strugi.
Linie prądu muszą się zagęszczać w węŜszej części a rozrzedzać w szerszej. To znaczy, rzadko rozmieszczone linie oznaczają obszary niskiej prędkości, linie rozmieszczone gęsto obszary wysokiej prędkości płynu.
3.1.6. Równanie Bernoulliego RozwaŜmy, pokazany na rysunku, nielepki, ustalony, nieściśliwy przepływ płynu w
strudze. Płyn na rysunku przemieszcza się w stronę prawą. W czasie ∆t powierzchnia S1 przemieszcza się o odcinek v1∆t. Analogicznie powierzchnia S2 przemieszcza się o odcinek v2∆t. Na powierzchnię S1 działa siła F1 = p1S1, a na powierzchnię S2 siła F2 = p2S2.
Rysunek 6. Struga płynu (gazu lub cieczy) przepływa w taki sposób, Ŝe zmienia się wysokość przepływu, oraz prędkość przepływu (bo zmienia się średnica strugi). Musi mieć to oczywiście wpływ na zmianę ciśnienia, jakie zmierzymy (tzw. ciśnienie punktowe), ale w przewidywalny sposób (por. prawo Bernoulliego).
Dla tej strugi moŜna pokazać, Ŝe:
(55)
lub (56)
Równanie to nosi nazwę równania Bernoulliego dla przepływu ustalonego, nielepkiego i nieściśliwego. Jest to podstawowe równanie mechaniki płynów. WyraŜa fakt, Ŝe z przepływem płynu związane jest (oprócz ciśnienia statycznego i hydrostatycznego) ciśnienie dynamiczne. Wynika z niego, Ŝe: suma trzech ciśnień: statycznego (teŜ punktowego), hydrostatycznego (związanego z wysokością przepływu) i dynamicznego (związanego z prędkością przepływu) nie zmienia się. Przepływ cieczy w strudze moŜe być wywołany róŜnicą ciśnień na końcach strugi lub róŜnicą poziomów tych końców.
3.1.7. Dynamiczna siła nośna W odróŜnieniu od statycznej siły nośnej, którą jest siła wyporu działającą zgodnie z
prawem Archimedesa na przykład na balon czy statek, dynamiczna siła nośna wywołana jest ruchem ciał w płynie na przykład na skrzydła samolotu czy śmigła helikoptera.
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
25
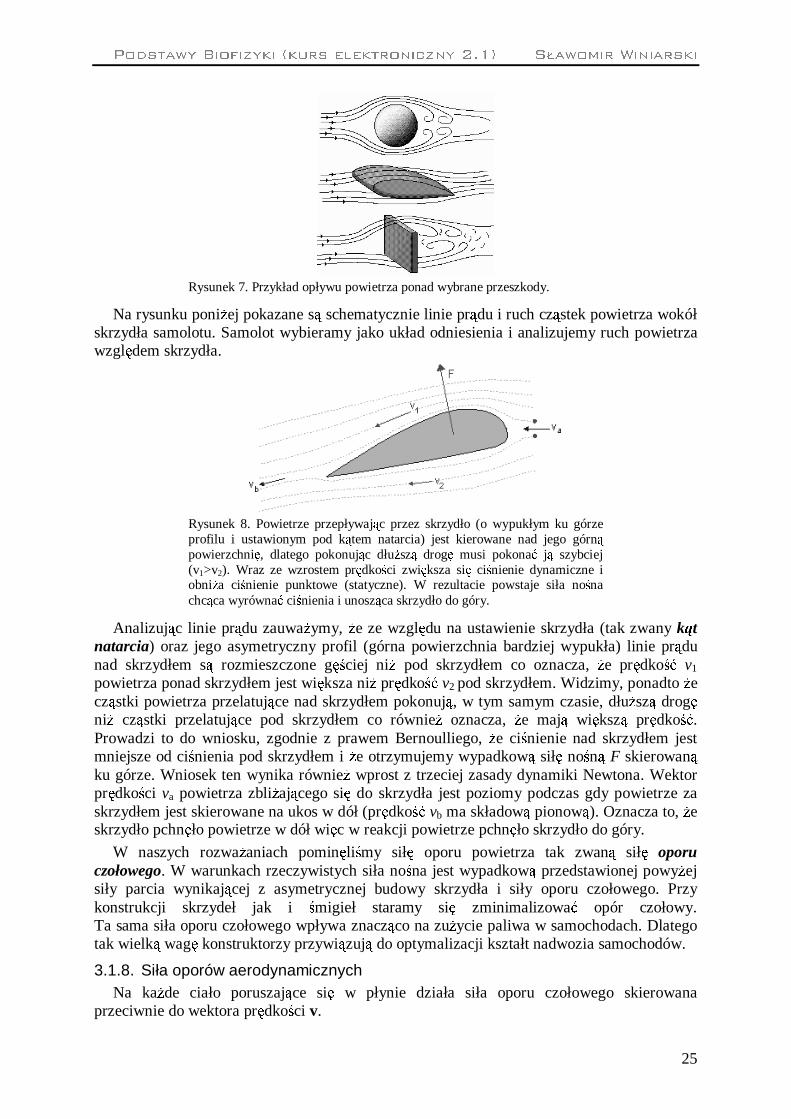
Rysunek 7. Przykład opływu powietrza ponad wybrane przeszkody.
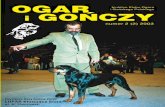
Na rysunku poniŜej pokazane są schematycznie linie prądu i ruch cząstek powietrza wokół skrzydła samolotu. Samolot wybieramy jako układ odniesienia i analizujemy ruch powietrza względem skrzydła.
Rysunek 8. Powietrze przepływając przez skrzydło (o wypukłym ku górze profilu i ustawionym pod kątem natarcia) jest kierowane nad jego górną powierzchnię, dlatego pokonując dłuŜszą drogę musi pokonać ją szybciej (v1>v2). Wraz ze wzrostem prędkości zwiększa się ciśnienie dynamiczne i obniŜa ciśnienie punktowe (statyczne). W rezultacie powstaje siła nośna chcąca wyrównać ciśnienia i unosząca skrzydło do góry.
Analizując linie prądu zauwaŜymy, Ŝe ze względu na ustawienie skrzydła (tak zwany kąt natarcia) oraz jego asymetryczny profil (górna powierzchnia bardziej wypukła) linie prądu nad skrzydłem są rozmieszczone gęściej niŜ pod skrzydłem co oznacza, Ŝe prędkość v1 powietrza ponad skrzydłem jest większa niŜ prędkość v2 pod skrzydłem. Widzimy, ponadto Ŝe cząstki powietrza przelatujące nad skrzydłem pokonują, w tym samym czasie, dłuŜszą drogę niŜ cząstki przelatujące pod skrzydłem co równieŜ oznacza, Ŝe mają większą prędkość. Prowadzi to do wniosku, zgodnie z prawem Bernoulliego, Ŝe ciśnienie nad skrzydłem jest mniejsze od ciśnienia pod skrzydłem i Ŝe otrzymujemy wypadkową siłę nośną F skierowaną ku górze. Wniosek ten wynika równieŜ wprost z trzeciej zasady dynamiki Newtona. Wektor prędkości va powietrza zbliŜającego się do skrzydła jest poziomy podczas gdy powietrze za skrzydłem jest skierowane na ukos w dół (prędkość vb ma składową pionową). Oznacza to, Ŝe skrzydło pchnęło powietrze w dół więc w reakcji powietrze pchnęło skrzydło do góry.
W naszych rozwaŜaniach pominęliśmy siłę oporu powietrza tak zwaną siłę oporu czołowego. W warunkach rzeczywistych siła nośna jest wypadkową przedstawionej powyŜej siły parcia wynikającej z asymetrycznej budowy skrzydła i siły oporu czołowego. Przy konstrukcji skrzydeł jak i śmigieł staramy się zminimalizować opór czołowy. Ta sama siła oporu czołowego wpływa znacząco na zuŜycie paliwa w samochodach. Dlatego tak wielką wagę konstruktorzy przywiązują do optymalizacji kształt nadwozia samochodów.
3.1.8. Siła oporów aerodynamicznych Na kaŜde ciało poruszające się w płynie działa siła oporu czołowego skierowana
przeciwnie do wektora prędkości v.

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
26
2
2
1vCSFop ⋅⋅= ρ (57)
gdzie ρ jest gęstością płynu, C jest współczynnikiem kształtu, a S – powierzchnią efektywną (czołową)
Powierzchnia czołowa S i współczynnik kształtu C moŜna dość łatwo wyznaczyć dla brył o prostych kształtach (np. dla kuli o promieniu R mamy S= πR2 i C≈0,5). Jednak w przypadku ciała człowieka wygodniej jest wyznaczyć doświadczalnie cały iloczyn C.S dla róŜnych pozycji. PoniŜszy rysunek przedstawia wyniki takich pomiarów przeprowadzonych w tunelu aerodynamicznym na osobie o długości ciała 1,8 m i masie 71,8 kg.
Przykład 1: siła oporu powietrza, którą musi pokonać sprinter.
V = 10 m/s
CS= 0,84m2 F= 0,5*!,3*102*0,84 = 54,6 [N]
Przykład 2: siła oporu wody, którą musi pokonać pływak.
V = 2 m/s
CS=O,11 m2 F=0,5*1000*22*0,11 = 220 [N]
4. FALA AKUSTYCZNA (DŹWIĘKOWA )
Dźwiękiem nazywamy falę mechaniczną przenoszoną przez drgania cząsteczek ośrodka poprzez naprzemienne ich zagęszczanie i rozrzedzanie (fala ciśnień). Dźwięki rozchodzą się zarówno w ośrodkach gazowych, płynnych i stałych. Nie rozchodzą się natomiast w próŜni!
Parametry bezpośrednio charakteryzujące falę to jej prędkość propagacji (v), jej częstotliwość (f), długość fali (λ) i amplituda (a) oraz natęŜenie (I). Dodatkowo fale dzieli się na okresowe lub nieokresowe.
Jeśli fala jest okresowa to jej powierzchnia falowa (o tej samej fazie) porusza się jedna za drugą w stałych odległościach wzajemnych. Odległość taką nazywa się długością fali , λλλλ, (zob. rysunek poniŜej) a okres, T, jest czasem przebycia jednej takiej długości fali:
vT
λ= (58)
Częstotliwością, f, natomiast określa się liczbę pełnych cykli fali do czasu wykonania tych cykli albo odwrotność okresu (jeden cykl przez czas trwania tego cyklu):
Tt
nf
1== (59)
Łącząc dwa powyŜsze wzory moŜemy otrzymać wzór wiąŜący częstotliwość i długość fali postaci:

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
27
λv
Tf == 1
(60)
Amplituda fali zdefiniowana została jako maksymalne wychylenie od wartości średniej. Dla fali sinusoidalnej (rysunek) jest to połowa wychylenia pomiędzy jej kolejnymi ekstremami (maksimum - minimum).
λv
a a x
a
Rysunek 9. Propagacja okresowej fali sinusoidalnej z prędkością v w kierunku x. λλλλ jest długością fali, a – jej amplitudą
Ze względu na to, Ŝe dla ucha ludzkiego słyszalne są tylko dźwięki z przedziału od ok. 20Hz do ok. 20kHz (20 000Hz) fale dźwiękowe dzielimy na trzy główne kategorie: infrad źwięki (poniŜej 20 Hz) dźwięki słyszalne i ultrad źwięki (powyŜej 20kHz). Ultradźwięki powyŜej 100MHz (108Hz) nazywa się czasami hiperdźwiękami.
Infradźwięki są generowane przez źródła o duŜych rozmiarach (towarzyszą trzęsieniom ziemi, wyładowaniom atmosferycznym, itp.). Infradźwięki są słabo tłumione w skorupie ziemskiej i w wodzie i mogą się rozchodzić na znaczne odległości. Przy odpowiednim poziomie ciśnienia akustycznego mogą oddziaływać powodując zaniepokojenie i nudności.
Ultradźwięki wytwarza i umie odbierać wiele zwierząt (psy, koty, delfiny, nietoperze), występują jako składowe drgań wytwarzanych przez naturalne źródła (wichury, wodospady, wyładowania atmosferyczne). Sztucznie, ultradźwięki generowane są najczęściej poprzez elektryczne pobudzanie do drgań kryształu kwarcu (odwrotny efekt piezoelektryczny). Ze względu na silną zaleŜność właściwości rozchodzenia się ultradźwięków w danym ośrodku od jego budowy, słuŜą one do badania struktury róŜnych ciał, m.in. organizmów Ŝywych (tzw. ultrasonografia). Zogniskowanych wiązek ultradźwięków uŜywa się do odrywania ciał stałych z bardziej elastycznego podłoŜa (usuwanie kamienia nazębnego, rozbijanie kamieni nerkowych, oczyszczanie powierzchni metali przed lutowaniem itd.). Energia drgań ultradźwięków moŜe być teŜ wykorzystana do rozpylania aerozoli i emulsji, a nawet do spawania!
4.1. NATĘśENIE I POZIOM NATĘśENIA DŹWIĘKU; Poza widmem częstotliwości dźwięki charakteryzuje się podając jego natęŜenie (lub
poziom natęŜenia). NatęŜenie dźwięku (inaczej natęŜenie akustyczne) zdefiniowane jest jako średnia moc dźwięku (P) (energia w jednostce czasu) przypadająca na jednostkę powierzchni ustawionej prostopadle do kierunku ruchu fali, S :
⊥⊥
=⋅
=S
P
St
EI (61)
Jednostką podstawową natęŜenia dźwięku jest W/m2 (wat na metr2).
Ze względu na ‘logarytmiczną’ charakterystykę ucha ludzkiego w akustyce stosuje się wielkość podobną do natęŜenia dźwięku, tzw. poziom natęŜenia dźwięku, ΛΛΛΛ (lambda). Zdefiniowany jest on jako stosunek danego dźwięku I do tzw. dźwięku odniesienia I0=10-12 W/m2 przyjętego za dźwięk porównawczy. Związek pomiędzy natęŜeniem i jego poziomem jest następujący:
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
28
⋅=Λ0
log10I
I (62)
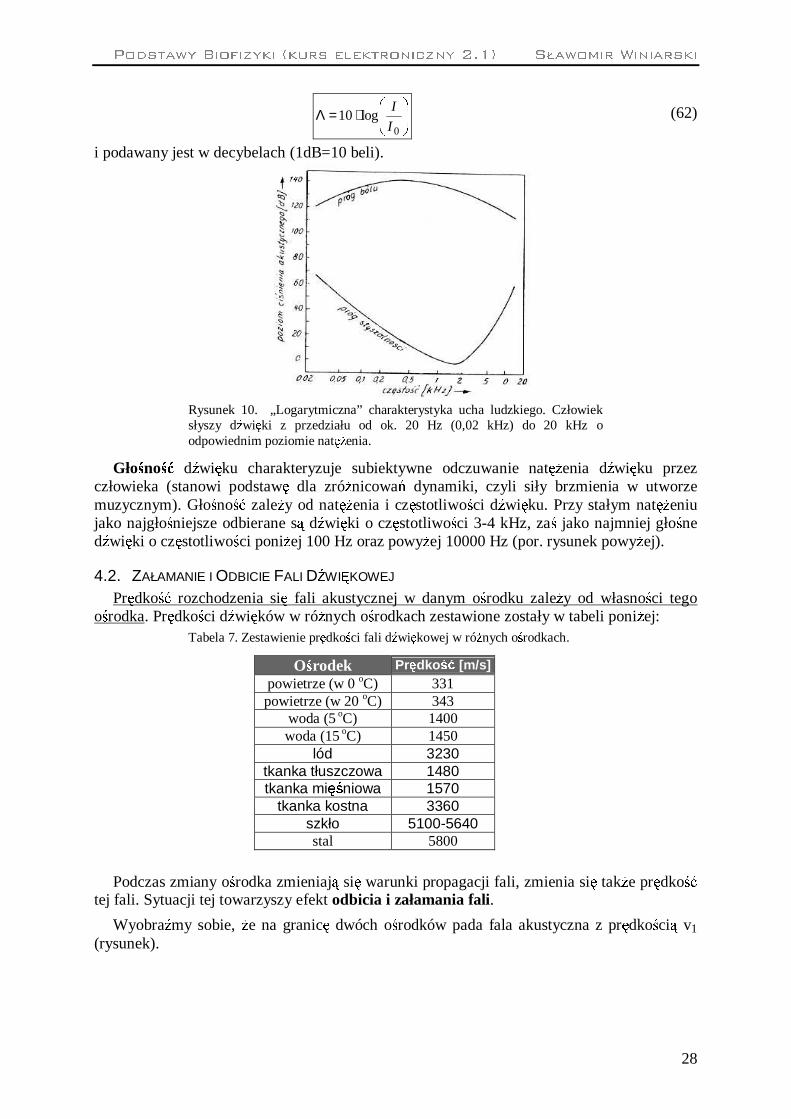
i podawany jest w decybelach (1dB=10 beli).
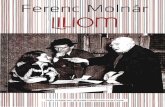
Rysunek 10. „Logarytmiczna” charakterystyka ucha ludzkiego. Człowiek słyszy dźwięki z przedziału od ok. 20 Hz (0,02 kHz) do 20 kHz o odpowiednim poziomie natęŜenia.
Głośność dźwięku charakteryzuje subiektywne odczuwanie natęŜenia dźwięku przez człowieka (stanowi podstawę dla zróŜnicowań dynamiki, czyli siły brzmienia w utworze muzycznym). Głośność zaleŜy od natęŜenia i częstotliwości dźwięku. Przy stałym natęŜeniu jako najgłośniejsze odbierane są dźwięki o częstotliwości 3-4 kHz, zaś jako najmniej głośne dźwięki o częstotliwości poniŜej 100 Hz oraz powyŜej 10000 Hz (por. rysunek powyŜej).
4.2. ZAŁAMANIE I ODBICIE FALI DŹWIĘKOWEJ Prędkość rozchodzenia się fali akustycznej w danym ośrodku zaleŜy od własności tego
ośrodka. Prędkości dźwięków w róŜnych ośrodkach zestawione zostały w tabeli poniŜej: Tabela 7. Zestawienie prędkości fali dźwiękowej w róŜnych ośrodkach.
Ośrodek Prędko ść [m/s] powietrze (w 0 oC) 331 powietrze (w 20 oC) 343
woda (5 oC) 1400 woda (15 oC) 1450
lód 3230 tkanka tłuszczowa 1480 tkanka mięśniowa 1570
tkanka kostna 3360 szkło 5100-5640 stal 5800
Podczas zmiany ośrodka zmieniają się warunki propagacji fali, zmienia się takŜe prędkość tej fali. Sytuacji tej towarzyszy efekt odbicia i załamania fali.
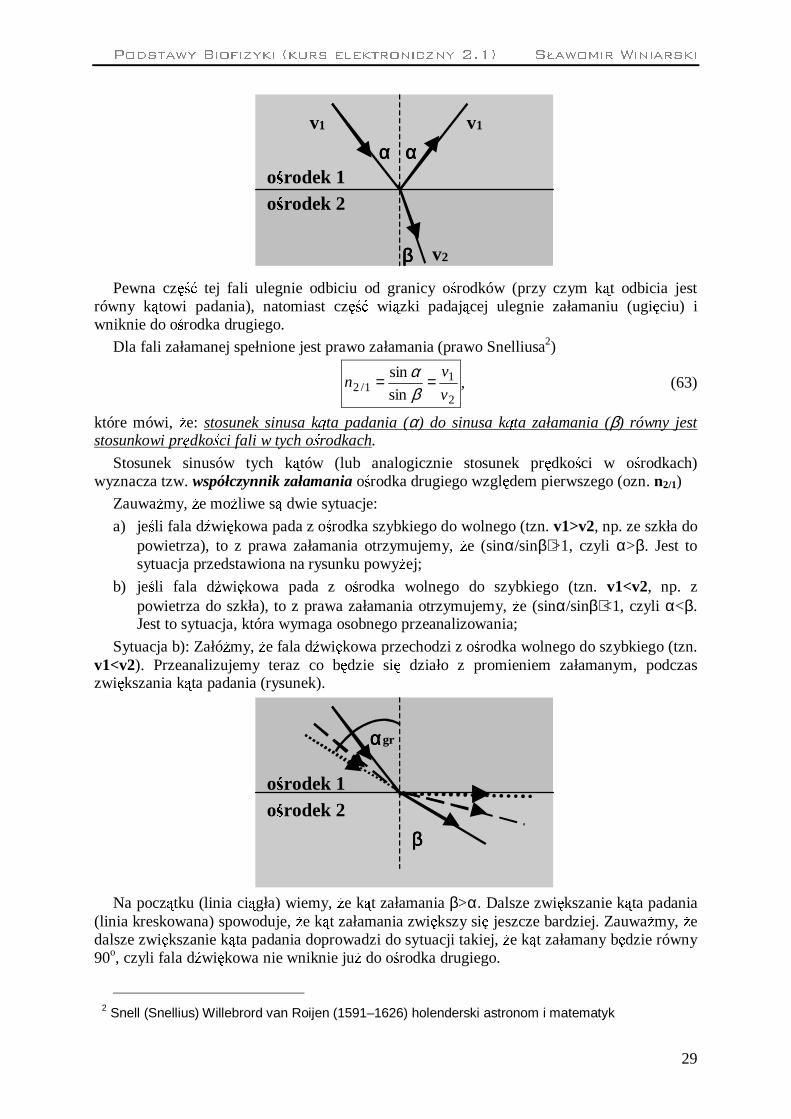
Wyobraźmy sobie, Ŝe na granicę dwóch ośrodków pada fala akustyczna z prędkością v1 (rysunek).
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
29
v1 v1
α αα αα αα αośrodek 1ośrodek 2
ββββ v2
Pewna część tej fali ulegnie odbiciu od granicy ośrodków (przy czym kąt odbicia jest równy kątowi padania), natomiast część wiązki padającej ulegnie załamaniu (ugięciu) i wniknie do ośrodka drugiego.
Dla fali załamanej spełnione jest prawo załamania (prawo Snelliusa2)
2
11/2 sin
sin
v
vn ==
βα
, (63)
które mówi, Ŝe: stosunek sinusa kąta padania (α) do sinusa kąta załamania (β) równy jest stosunkowi prędkości fali w tych ośrodkach.
Stosunek sinusów tych kątów (lub analogicznie stosunek prędkości w ośrodkach) wyznacza tzw. współczynnik załamania ośrodka drugiego względem pierwszego (ozn. n2/1)
ZauwaŜmy, Ŝe moŜliwe są dwie sytuacje:
a) jeśli fala dźwiękowa pada z ośrodka szybkiego do wolnego (tzn. v1>v2, np. ze szkła do powietrza), to z prawa załamania otrzymujemy, Ŝe (sinα/sinβ)>1, czyli α>β. Jest to sytuacja przedstawiona na rysunku powyŜej;
b) jeśli fala dźwiękowa pada z ośrodka wolnego do szybkiego (tzn. v1<v2, np. z powietrza do szkła), to z prawa załamania otrzymujemy, Ŝe (sinα/sinβ)<1, czyli α<β. Jest to sytuacja, która wymaga osobnego przeanalizowania;
Sytuacja b): ZałóŜmy, Ŝe fala dźwiękowa przechodzi z ośrodka wolnego do szybkiego (tzn. v1<v2). Przeanalizujemy teraz co będzie się działo z promieniem załamanym, podczas zwiększania kąta padania (rysunek).
ααααgr
ośrodek 1ośrodek 2
ββββ
Na początku (linia ciągła) wiemy, Ŝe kąt załamania β>α. Dalsze zwiększanie kąta padania
(linia kreskowana) spowoduje, Ŝe kąt załamania zwiększy się jeszcze bardziej. ZauwaŜmy, Ŝe dalsze zwiększanie kąta padania doprowadzi do sytuacji takiej, Ŝe kąt załamany będzie równy 90o, czyli fala dźwiękowa nie wniknie juŜ do ośrodka drugiego.
2 Snell (Snellius) Willebrord van Roijen (1591–1626) holenderski astronom i matematyk
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
30
Kąt padania, dla którego kąt załamania jest prosty nosi nazwę kąta granicznego (αgr.) i został zaznaczony na rysunku. Propagację fali pod kątem większym od kąta granicznego nazywa się całkowitym wewnętrznym odbiciem (c.w.o.).
Warunkiem zaistnienia c.w.o. jest zatem, aby fala przechodziła z ośrodka wolnego (o mniejszej gęstości) do szybkiego (o większej gęstości) tzn.: v1<v2 lub v1/v2<1. ZauwaŜmy, Ŝe dla padania pod kątem granicznym α=αgr. z prawa załamania otrzymamy:
..
1/2 sin90sin
sin
sin
singr
grn α
αβα === o (64)
4.3. ZJAWISKO DOPPLERA Z efektem Dopplera3 mamy do czynienia, gdy źródło fali dźwiękowej lub jego odbiornik
poruszają się względem siebie. Obserwuje się wtedy rozbieŜność pomiędzy częstotliwością wysłanego dźwięku a jego wartością zarejestrowaną.
W ogólnym przypadku, gdy nadajnik (źródło) zbliŜa się z prędkością vn do odbiornika zbliŜającego się z prędkością vo, jeśli przez fn oznaczymy częstotliwość fali nadanej, to częstotliwość fali odebranej (fo) moŜna obliczyć ze wzoru:
n
ono vv
vvff
−+
⋅= , (65)
gdzie v jest prędkością dźwięku w ośrodku (najczęściej w powietrzu).
Uwaga 1: Wzór ten dotyczy sytuacji, gdy źródło i odbiornik poruszają się w tym samym kierunku (po tej samej prostej).
Uwaga 2: Gdyby nadajnik lub odbiornik oddalały się od siebie naleŜy zmienić znak wartości jego prędkości w powyŜszym wzorze.
5. TERMODYNAMIKA
Termodynamika zajmuje się właściwościami cieplnymi i przemianami energetycznymi układów makroskopowych, zaniedbując (w odróŜnieniu od mechaniki statystycznej) mikroskopową budowę ciał tworzących układ. Gdybyśmy chcieli ściśle określić stan fizyczny układu zawierającego ogromną liczbę cząsteczek, na przykład porcji gazu, to musielibyśmy znać stan kaŜdej cząsteczki oddzielnie to znaczy musielibyśmy podać połoŜenie kaŜdej cząsteczki, jej prędkość oraz siły nań działające. Takie obliczenia ze względu na duŜą liczbę cząsteczek są niemoŜliwe. Okazuje się jednak, Ŝe posługując się metodami statystycznymi (rachunkiem prawdopodobieństwa) moŜemy znaleźć związki między wielkościami mikroskopowymi (dotyczącymi poszczególnych cząsteczek), a wielkościami makroskopowymi opisującymi cały układ.
Chcąc opisać gaz jako całość moŜemy więc badać jedynie wielkości makroskopowe takie jak ciśnienie, temperatura czy objętość bez wdawania się w zachowanie poszczególnych cząsteczek.
5.1. GAZ DOSKONAŁY Rozpocznijmy nasze rozwaŜania od definicji wyidealizowanego gazu doskonałego.
Zrobimy to podając następujące załoŜenia dotyczące cząsteczek gazów:
3 Doppler, Christian Johann (1803–1853) austriacki fizyk

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
31
Cząsteczki gazu doskonałego traktujemy jako: punkty materialne (objętość cząsteczek gazu jest o wiele mniejsza niŜ objętość zajmowana przez gaz i dlatego z dobrym przybliŜeniem przyjmujemy, Ŝe ich objętość jest równa zeru); W gazie doskonałym zderzenia z innymi cząsteczkami oraz ze ściankami naczynia są spręŜyste i dlatego całkowita energia cząsteczek jest równa ich energii kinetycznej; energia potencjalna jest stale równa zeru (nie ma przyciągania ani odpychania pomiędzy cząsteczkami).
5.2. TEMPERATURA, RÓWNANIE STANU GAZU DOSKONAŁEGO
5.2.1. Zerowa zasada termodynamiki Potocznie temperaturę rozumiemy jako miarę ciepłoty układu. Za pomocą dotyku,
moŜemy np. stwierdzić, które z dwóch ciał jest cieplejsze. Mówimy o nim, Ŝe ma wyŜszą temperaturę. MoŜemy równieŜ stwierdzić, Ŝe gdy dwa ciała o róŜnych temperaturach zetkniemy ze sobą (i odizolujemy od innych) to po dostatecznie długim czasie ich temperatury wyrównają się. Mówimy wtedy, Ŝe te ciała są w równowadze termicznej ze sobą. Formułujemy teraz postulat nazywany zerowa zasadą termodynamiki:
„JeŜeli ciała 1 i 3 są w równowadze termicznej, a takŜe ciała 2 i 3 są w równowadze termicznej to ciała 1 i 2 są w tej samej równowadze termicznej”
Jako kryterium równowagi cieplnej między ciałami wprowadzamy pojęcie temperatury. Umawiamy się, Ŝe układom fizycznym, które mogą być jednocześnie ze sobą w stanie równowagi cieplnej, przypisujemy tę samą temperaturę. 5.2.2. Kinetyczna interpretacja temperatury
Teraz gdy zapoznaliśmy się z pojęciem temperatury poznamy jej definicję na gruncie teorii kinetycznej, czyli przy podejściu mikroskopowym.
Temperaturę bezwzględną definiujmy jako wielkość wprost proporcjonalną do średniej energii kinet ycznej cz ąsteczek .
(66)
Czynnik (2/3k) jest współczynnikiem proporcjonalności. Wartość stałej k, zwanej stałą Boltzmana, wynosi k = 1.38·10−23 J/K. Z tej definicji wynika, Ŝe średnie energie kinetyczne ruchu postępowego (na cząsteczkę) dla dwu kontaktujących się gazów są równe.
5.2.3. Równanie stanu gazu doskonałego Równanie stanu gazu doskonałego (Clapeyrona4) jest postaci :
(67)
PoniewaŜ przy opisie własności gazów wygodnie jest posługiwać się liczbą moli n to równanie stanu gazu często przedstawia się w postaci poniŜszej:
(68)
gdzie stała R = 8.314·J/mol K jest uniwersalną stałą gazową związaną ze stałą Boltzmana i liczbą Avogadra NAv relacją R = kNAv. Stała Avogadra NAv = 6.023·1023 1/mol, określa liczbę cząsteczek w jednym molu.
Przypomnijmy, Ŝe 1 mol jest ilością materii układu zawierającego liczbę cząsteczek równą liczbie atomów zawartych w 0.012 kg węgla 12C (równą NAv).
4 Benoit Pierre Clapeyron [czyt. Klaperą] (1799–1864);

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
32
Równanie stanu gazu doskonałego zostało sformułowane w XIX w. przez Clapeyrona na podstawie trzech praw empirycznych odkrytych wcześniej przez innych badaczy:
• prawa Boyle'a-Mariotte'a, które stwierdza, Ŝe w stałej temperaturze iloczyn ciśnienia i objętości danej masy gazu jest stały pV = const. (przemiana izotermiczna );
• prawa Charlesa, które mówi, Ŝe przy stałej objętości gazu stosunek ciśnienia i temperatury danej masy gazu jest stały p/T = const.(przemiana izochoryczna );
• prawa Gay-Lussaca, które stwierdza, Ŝe dla stałego ciśnienia stosunek objętości do temperatury danej masy gazu jest stały V/T = const (przemiana izobaryczna );
Clapeyron podsumował te wyniki podając ogólną zaleŜność: (69)
zgodną z równaniem stanu dla gazu doskonałego mówiące, Ŝe: iloczyn ciśnienia i objętości i podzielny przez temperaturę nie zmienia się podczas przemiany termodynamicznej gazu doskonałego. Równanie to opisuje równieŜ z dobrym przybliŜeniem rozrzedzone gazy rzeczywiste (w tym powietrze).
5.2.4. Pomiar temperatury, skale temperatur śeby wyznaczyć temperaturę na podstawie definicji musielibyśmy wyznaczyć energię kinetyczną cząsteczek gazu co jest bardzo trudne. Ale moŜemy się posłuŜyć równaniem stanu gazu doskonałego. Łatwo bowiem jest zmierzyć iloczyn pV na przykład dla gazu pod stałym ciśnieniem lub przy stałej objętości. Termometr gazowy słuŜył przez wiele lat jako wzorzec temperatury. Za jego pomocą określono doświadczalnie punkty odniesienia, takie jak na przykład punkt wrzenia wody, dla praktycznych pomiarów temperatur. W praktyce w powszechnym uŜyciu jest skala Celsjusza. W tej skali temperatura równowagi wody i lodu wynosi 0° C, a temperatura równowagi wody i pary wodnej wynosi 100° C. Natomiast w fizyce stosujemy bezwzględną termodynamiczną skalę temperatur nazywaną skalą Kelvina5.
Jednostką temperatury bezwzględnej jest kelwin (K). PoniewaŜ w obu skalach Kelvina i Celsjusza róŜnica pomiędzy temperaturą zamarzania i wrzenia wody wynosi 100 stopni więc wielkość stopnia jest taka sama w obu skalach.
Między temperaturą w skali Celsjusza tC a temperaturą w skali bezwzględnej T zachodzi związek:
(70)
5.3. EKWIPARTYCJA ENERGII Wiemy juŜ, Ŝe w równowadze termodynamicznej średnie energie kinetyczne ruchu
postępowego wszystkich cząsteczek są równe. Powstaje pytanie czy cząsteczka moŜe gromadzić energię w innej postaci niŜ energia ruchu postępowego?
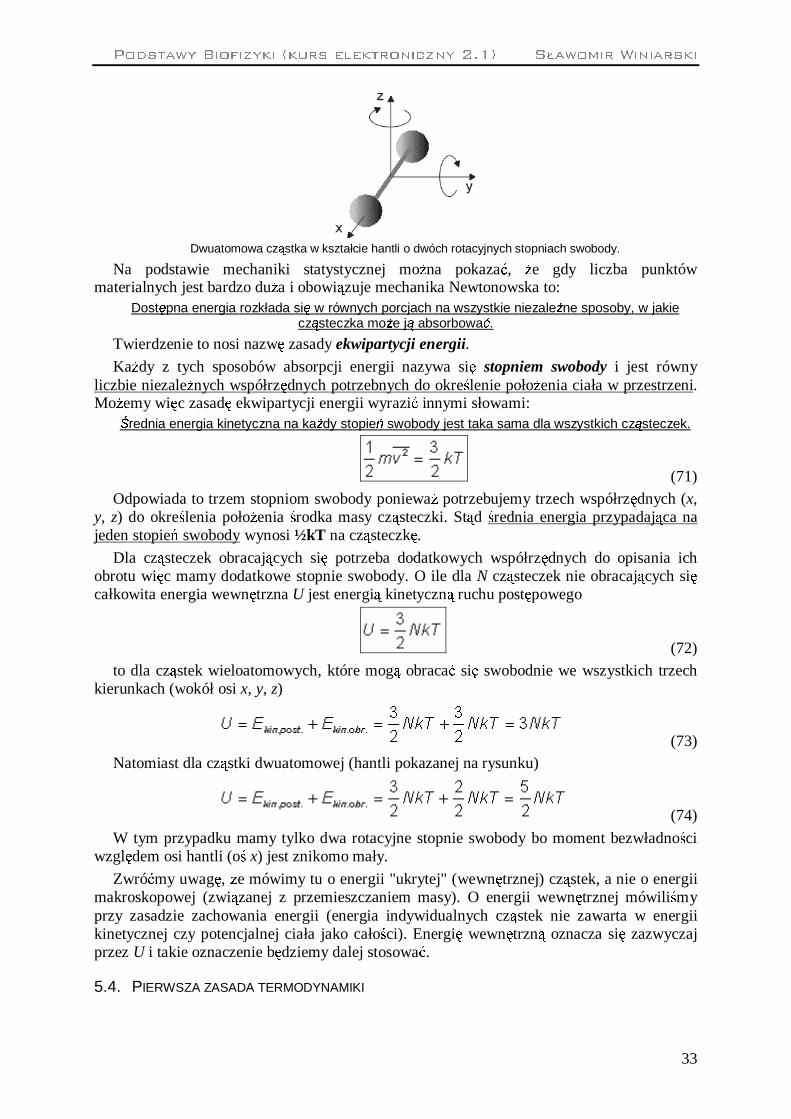
Odpowiedź jest twierdząca: jeŜeli tylko cząsteczka nie ma kształtu kulki (cząsteczka jednoatomowa), a ma pewną strukturę wewnętrzną to moŜe wirować i drgać. Przykładowo, dwuatomowa cząsteczka w kształcie hantli (rysunek) będzie się obracać po zderzeniu z inną cząsteczką.
5 Thomson William, lord Kelvin (1824–1907)
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
33
Dwuatomowa cząstka w kształcie hantli o dwóch rotacyjnych stopniach swobody.
Na podstawie mechaniki statystycznej moŜna pokazać, Ŝe gdy liczba punktów materialnych jest bardzo duŜa i obowiązuje mechanika Newtonowska to:
Dostępna energia rozkłada się w równych porcjach na wszystkie niezaleŜne sposoby, w jakie cząsteczka moŜe ją absorbować.
Twierdzenie to nosi nazwę zasady ekwipartycji energii. KaŜdy z tych sposobów absorpcji energii nazywa się stopniem swobody i jest równy
liczbie niezaleŜnych współrzędnych potrzebnych do określenie połoŜenia ciała w przestrzeni. MoŜemy więc zasadę ekwipartycji energii wyrazić innymi słowami: Średnia energia kinetyczna na kaŜdy stopień swobody jest taka sama dla wszystkich cząsteczek.
(71)
Odpowiada to trzem stopniom swobody poniewaŜ potrzebujemy trzech współrzędnych (x, y, z) do określenia połoŜenia środka masy cząsteczki. Stąd średnia energia przypadająca na jeden stopień swobody wynosi ½kT na cząsteczkę.
Dla cząsteczek obracających się potrzeba dodatkowych współrzędnych do opisania ich obrotu więc mamy dodatkowe stopnie swobody. O ile dla N cząsteczek nie obracających się całkowita energia wewnętrzna U jest energią kinetyczną ruchu postępowego
(72)
to dla cząstek wieloatomowych, które mogą obracać się swobodnie we wszystkich trzech kierunkach (wokół osi x, y, z)
(73) Natomiast dla cząstki dwuatomowej (hantli pokazanej na rysunku)
(74)
W tym przypadku mamy tylko dwa rotacyjne stopnie swobody bo moment bezwładności względem osi hantli (oś x) jest znikomo mały.
Zwróćmy uwagę, Ŝe mówimy tu o energii "ukrytej" (wewnętrznej) cząstek, a nie o energii makroskopowej (związanej z przemieszczaniem masy). O energii wewnętrznej mówiliśmy przy zasadzie zachowania energii (energia indywidualnych cząstek nie zawarta w energii kinetycznej czy potencjalnej ciała jako całości). Energię wewnętrzną oznacza się zazwyczaj przez U i takie oznaczenie będziemy dalej stosować. 5.4. PIERWSZA ZASADA TERMODYNAMIKI

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
34
W mechanice rozwaŜaliśmy zmiany energii mechanicznej układu będące wynikiem pracy wykonanej przez siły zewnętrzne. W przemianach termodynamicznych moŜliwy jest inny (nie mechaniczny) sposób przekazywania energii. Gdy dwa układy o róŜnych temperaturach zetkniemy ze sobą to ciepło Q przepływa z ciała cieplejszego do chłodniejszego.
Zgodnie z zasadą zachowania energii:
„Energia wewnętrzna układu ∆∆∆∆U (suma energii kinetycznej i potencjalnej atomów i cząsteczek) moŜe być zmieniana tylko poprzez wykonywanie pracy W przez układ (lub nad
układem) lub poprzez pobranie (lub oddanie) ciepła Q”
QWU +=∆ (75)
Jest to sformułowanie pierwszej zasady termodynamiki. W tym zapisie mamy rozdzieloną energię ciała na część makroskopową (energię mechaniczną) i mikroskopową (energia wewnętrzną). Widzimy, Ŝe zmiana energii wewnętrznej związana jest z ciepłem pobieranym (Q>0) lub oddawanym (Q<0) przez układ oraz z pracą wykonaną przez układ (W<0) lub nad układem (W>0).
Pamiętamy, Ŝe w mechanice praca sił zachowawczych wykonana nad punktem materialnym poruszającym się między dwoma punktami zaleŜała tylko od tych punktów, a nie od łączącej je drogi. W termodynamice stwierdzamy, Ŝe :
Zmiana energii wewnętrznej układu, przy przejściu pomiędzy dwoma stanami, zaleŜy wyłącznie od tego jaki jest stan początkowy i końcowy przejścia.
Oznacza to, Ŝe chociaŜ Q i W z osobna zaleŜą od drogi przejścia to U ma określoną wartość niezaleŜną od sposobu przejścia układu do stanu końcowego. Taką wielkość fizyczną (funkcję tego typu), która charakteryzuje stan układu, i której wartości nie zaleŜą od sposobu w jaki układ został do danego stanu doprowadzony nazywamy funkcją stanu.
5.5. CIEPŁO WŁAŚCIWE
Ciepło właściwe substancji definiujemy jako:
Tm
Qcw ∆⋅
∆= (76)
czyli ilość ciepła, którą trzeba dostarczyć do jednostki masy, Ŝeby spowodować jednostkową zmianę jej temperatury.
Gdy masę wyraŜamy w kilogramach to mówimy o cieple właściwym wagowym, a gdy wyraŜamy ją w molach to mamy do czynienia z molowym ciepłem właściwym.
5.6. BILANS CIEPLNY Energie cieplną (Ciepło) przepływającą w momencie zmiany temperatury określa związek:
( ) TcmTTcmQ wpkw ∆⋅⋅=−⋅⋅= (77)
gdzie: m – masa, cw – ciepło właściwe, ∆∆∆∆T – róŜnica temperatur (końcowa - początkowa).
Ciepło przemiany fazowej – Qpf: Qpf = ± m.L (78)
gdzie: m – masa, L – ciepło przemiany fazowej na kg masy ciała i określa ilość ciepła (pobranego lub oddanego) potrzebnego na przeprowadzenie określonej przemiany fazowej.
Uwaga: Umowa: ciepło pobrane „+”, ciepło oddane „–”
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
35
5.7. ZASADA BILANSU CIEPLNEGO: Dla układu zamkniętego (bezstratnego, izolowanego adiabatycznie) całkowita suma ilości
ciepła przekazanego przez ciała jest równa zero:
0...21 =+++ nQQQ (79)
a dla układu otwartego:
EQQQ n ∆=+++ ...21 (80)
gdzie: ∆∆∆∆E jest sumą strat (∆E<0) lub zysków (∆E>0) energetycznych z otoczenia.
5.8. PROCESY ODWRACALNE I NIEODWRACALNE, CYKL CARNOTA Rozpatrzmy dwa przypadki izotermicznego spręŜania gazu. W pierwszym, tłok
przesuwamy bardzo szybko i czekamy aŜ ustali się równowaga z otoczeniem. W czasie takiego procesu ciśnienie i temperatura gazu nie są dobrze określone bo nie są jednakowe w całej objętości.
W drugim tłok przesuwamy bardzo powoli tak, Ŝe ciśnienie i temperatura gazu są w kaŜdej chwili dobrze określone. PoniewaŜ zmiana jest niewielka to gaz szybko osiąga nowy stan równowagi. MoŜemy złoŜyć cały proces z ciągu takich małych przesunięć tłoka i wtedy podczas całego procesu gaz jest bardzo blisko równowagi. JeŜeli będziemy zmniejszać nasze zmiany to w granicy dojdziemy do procesu idealnego, w którym wszystkie stany pośrednie (pomiędzy początkowym i końcowym) są stanami równowagi.
Pierwszy proces nazywamy procesem nieodwracalnym , a proces drugi procesem odwracalnym .
Proces nazywamy odwracalnym gdy za pomocą bardzo małej zmiany otoczenia moŜna wywołać proces odwrotny do niego tzn. przebiegający po tej samej drodze w przeciwnym kierunku bez zmian w
otoczeniu.
Przykładem cyklu odwracalnego jest cykl Carnota. Jest to bardzo waŜny cykl odwracalny poniewaŜ wyznacza granicę naszych moŜliwości zamiany ciepła na pracę.
Pewna ilość ciepła Q została zamieniona na pracę W. MoŜemy powtarzać ten cykl uzyskując potrzebną ilość pracy. Takie urządzenie nazywamy silnikiem cieplnym. Sprawność η silnika cieplnego definiujemy jako:
(81)
Część pobranego ciepła Q1 jest w silniku zamieniana na pracę W, a część oddawana jako ciepło Q2. Sprawność termodynamiczną określa się takŜe jako: stosunek pracy wykonanej (W) przez dany układ do całkowitej energii cieplnej (Q) zuŜytej przezeń do jej wykonania i podaje w procentach:
%100Q
W
pobrane cieplo
wykonanapracaη ⋅== (82)
5.9. ENTROPIA I DRUGA ZASADA TERMODYNAMIKI Zwróćmy jeszcze raz uwagę na to, Ŝe w trakcie pracy (cyklu) silnika cieplnego część
pobieranego ciepła była oddawana do zbiornika o niŜszej temperaturze i w konsekwencji ta ilość ciepła nie była zamieniana na pracę. Powstaje pytanie, czy moŜna skonstruować urządzenie, które pobierałoby ciepło i w całości zamieniałoby je na pracę? Moglibyśmy wtedy wykorzystać ogromne (z naszego punktu widzenia nieskończone) ilości ciepła zgromadzone w oceanach, które byłyby stale uzupełniane poprzez promieniowanie słoneczne.
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
36
Negatywna, niestety, odpowiedź na to pytanie jest zawarta w drugiej zasadzie termodynamiki. PoniŜej podane zostały równowaŜne sformułowania tej zasady
NiemoŜliwa jest przemiana, której jedynym wynikiem byłaby zamiana na pracę ciepła pobranego ze źródła mającego wszędzie jednakową temperaturę.
Oznacza to, Ŝe nie moŜemy zbudować doskonałego silnika cieplnego, bo nie moŜemy wytwarzać pracy pobierając jedynie ciepło z jednego zbiornika bez oddawania pewnej ilości ciepła do zbiornika zimniejszego. śadna cyklicznie pracująca maszyna nie moŜe bez zmian w otoczeniu przenosić w sposób
ciągły ciepła z jednego ciała do drugiego o wyŜszej temperaturze.
Wiemy, z doświadczenia, Ŝe ciepło przepływa od ciała cieplejszego do ciała zimniejszego. śeby zmienić ten kierunek musi zostać wykonana praca przez czynnik zewnętrzny. Nie moŜna więc zbudować doskonałej maszyny chłodzącej, która bez dodatkowych efektów (wydatkowania pracy z zewnątrz) przenosiłaby w sposób ciągły ciepło z ciała zimniejszego do cieplejszego. śadna cykliczna maszyna cieplna pracująca pomiędzy temperaturami T1 i T2 nie moŜe
mieć sprawności większej niŜ (T1 − T2)/T1.
Oznacza to, Ŝe Ŝadna maszyna cieplna nie moŜe mieć sprawności większej od sprawności silnika Carnota.
5.10. ENTROPIA Zerowa zasada termodynamiki wiąŜe się z pojęciem temperatury. Pierwsza zasada
termodynamiki wiąŜe się z pojęciem energii wewnętrznej. Natomiast drugą zasadę termodynamiki wiąŜemy z pojęciem entropii.
Druga zasada termodynamiki mówi, Ŝe:
W układzie zamkniętym entropia S nie moŜe maleć. dS ≥ 0. (83)
Entropia S jest termodynamiczna funkcją stanu, zaleŜy tylko od początkowego i końcowego stanu układu, a nie od drogi przejścia pomiędzy tymi stanami. Entropia jest funkcją określoną dla stanu równowagi, taką Ŝe dla procesu odwracalnego:
T
dQdS= (84)
gdzie dQ jest ciepłem dostarczanym do układu w procesie odwracalnym.
Z tego punktu widzenia szczególnie interesujące są procesy adiabatyczne nie związane z przepływem ciepła pomiędzy układem i otoczeniem. W procesie adiabatycznym dQ = 0, więc dla procesu odwracalnego dS = 0. Oznacza to, Ŝe:
Entropia układu izolowanego adiabatycznie, w którym zachodzą procesy odwracalne, jest stała. Jednocześnie moŜna pokazać, Ŝe dla procesu adiabatycznego nieodwracalnego,
entropia układu rośnie.
MoŜna uogólnić zasadę wzrostu entropii na układy nieizolowane adiabatycznie to znaczy takie, które wymieniają ciepło z otoczeniem. Traktujemy wtedy nasz układ i otoczenie razem jako jeden "większy" układ ponownie izolowany adiabatycznie. Wtedy
(85)

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
37
gdzie dSo jest zmianą entropii otoczenia. Zmienia się więc entropia naszego układu i otoczenia. JeŜeli proces jest odwracalny to podczas przenoszenia ciepła dQ z otoczenia do naszego układu entropia otoczenia maleje o dQ/T, a entropia układu rośnie o tę samą wartość dQ/T, więc całkowita zmiana entropii jest równa zeru.
Zatem posługując się entropią (zgodnie z drugą zasadą termodynamiki) moŜemy stwierdzić czy dany proces moŜe zachodzić w przyrodzie.
5.10.1. Entropia a nieuporządkowanie Entropię układu moŜna opisać na gruncie mechaniki statystycznej. W takim podejściu
entropia jest miarą nieuporządkowania układu cząstek. Zgodnie z drugą zasadą termodynamiki dla procesów zachodzących w przyrodzie entropia układu (wraz z otoczeniem) rośnie to znaczy, Ŝe rośnie równieŜ nieuporządkowanie (układu wraz z otoczeniem). Oznacza to, Ŝe im większy jest stan nieporządku (połoŜeń i prędkości cząstek) w układzie tym większe jest prawdopodobieństwo, Ŝe układ będzie w tym stanie.
Z definicji entropia układu jest równa: (86)
gdzie, k jest stałą Boltzmana, a w –prawdopodobieństwem, Ŝe układ znajdzie się w danym stanie (w odniesieniu do wszystkich pozostałych stanów).
Podsumowując, w ujęciu termodynamicznym stan równowagi odpowiada stanowi o największej entropii, a w ujęciu statystycznym jest stanem najbardziej prawdopodobnym.
5.11. STANY RÓWNOWAGI, ZJAWISKA TRANSPORTU
5.11.1. Stany równowagi fazowej W dotychczasowych naszych rozwaŜaniach posługiwaliśmy się pojęciem stanu
równowagi układu, czyli stanu, w którym Ŝaden z parametrów potrzebnych do makroskopowego opisu układu nie zaleŜy od czasu. Zajmowaliśmy się procesami, które zaczynały się jednym stanem równowagi, a kończyły innym stanem równowagi. Dla układu jednorodnego (przykładowo gazu) w stanie równowagi do jego opisu wystarcza znajomość dwu podstawowych parametrów stanu na przykład ciśnienia i objętości. Opis komplikuje się gdy mamy układ niejednorodny na przykład ciecz w równowadze z parą. Dla danej temperatury stan równowagi tego układu jest moŜliwy przy róŜnych objętościach układu (od objętości zaleŜy ilość fazy ciekłej i gazowej). Natomiast temperatura i ciśnienie przestają być niezaleŜne. W kaŜdej temperaturze równowaga jest moŜliwa tylko przy określonym ciśnieniu (pary nasyconej). Przy wyŜszym istnieje tylko ciecz, przy niŜszym para. Podobnie ciecz i ciało stałe mogą istnieć w równowadze tylko w temperaturze topnienia, która jest funkcją ciśnienia. Wreszcie ciało stałe współistnieje w równowadze z parą nasyconą, której ciśnienie jest funkcją temperatury. Krzywe równowagi pokazane na rysunku:
Krzywe równowagi fazowej dla układu niejednorodnego. Obszar I - ciało stałe, obszar II - ciecz, obszar III - gaz
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
38
Literą a oznaczona jest krzywa równowagi ciało stałe - ciecz (związek temperatury topnienia z ciśnieniem). Krzywa a' przedstawia tę zaleŜność dla kilku nietypowych substancji, które przy topnieniu zmniejszają objętość na przykład dla lodu. Krzywa b + b' pokazuje zaleŜność ciśnienia pary nasyconej od temperatury. Odcinek b' to krzywa równowagi ciało stałe - para, a odcinek b to krzywa równowagi ciecz - para. Krzywa równowagi ciecz - para kończy się w punkcie krytycznym K. Dla temperatury wyŜszej od temperatury punktu krytycznego K zanika róŜnica pomiędzy fazą ciekłą i gazową. Dlatego warunkiem skroplenia gazu jest ochłodzenie go poniŜej jego temperatury krytycznej.
Punkt P, w którym łączą się krzywe nazywamy punktem potrójnym . W tym punkcie mogą znajdować się w równowadze wszystkie trzy stany skupienia. Dla wody odpowiada to ciśnieniu p = 610.6 Pa i T = 273.16 K (0.01 °C).
5.11.2. Zjawiska transportu Znajomość dochodzenie układów do stanów równowagi jest równie waŜna jak znajomość
ich własności w stanach równowagi, a kaŜdy układ pozostawiony samemu sobie przez dostatecznie długi czas dochodzi do stanu równowagi.
Teraz zapoznamy się z bardzo uproszczonym opisem zjawisk, które zachodzą gdy układy dąŜą do stanów równowagi. W zjawiskach tych mamy zawsze do czynienia z przenoszeniem (transportem) materii, energii, pędu lub ładunku elektrycznego. Wszystkie te zjawiska transportu opisujemy w pierwszym przybliŜeniu za pomocą takiego samego równania róŜniczkowego, które przedstawia propagację (rozprzestrzenianie się) pewnej wielkości fizycznej j mającą na celu osiągnięcie równowagi
(87)
W tym równaniu j jest gęstością strumienia wielkości fizycznej ϕ, a K jest stałą charakteryzującą daną sytuację fizyczną. Stałą K wiąŜemy z właściwościami mikroskopowymi rozpatrywanego układu statystycznego. Są to tak zwane współczynniki transportu.
Omówimy teraz krótko wybrane zjawiska transportu:
1) Dyfuzja w gazie, czyli przenoszenie cząstek (masy) w kierunku obszarów o mniejszej koncentracji n (dąŜenie do wyrównania koncentracji). Równanie (16.31) nosi teraz nazwę równania dyfuzji i ma postać
(88)
gdzie jD jest gęstością strumienia cząstek, dn/dx jest róŜnicą stęŜeń występującą na odległości dx, a D współczynnikiem dyfuzji. Równanie to znane jest pod nazwą prawa Ficka. PoniewaŜ dyfuzja jest przenoszeniem cząstek (z miejsc o większym stęŜeniu do miejsc o mniejszym stęŜeniu) więc mamy do czynienia z transportem masy.
2) Przewodnictwo cieplne czyli transport energii cieplnej (ciepła) – zjawisko polegające na samorzutnym wyrównywaniu się temperatury w całym układzie bez Ŝadnych makroskopowych ruchów materii. Transport energii cieplnej zachodzi najszybciej w metalach, a najwolniej w gazach. Miarą szybkości przewodnictwa cieplnego jest współczynnik przewodnictwa cieplnego κ, występujący w równaniu transportu ciepła:
(89)
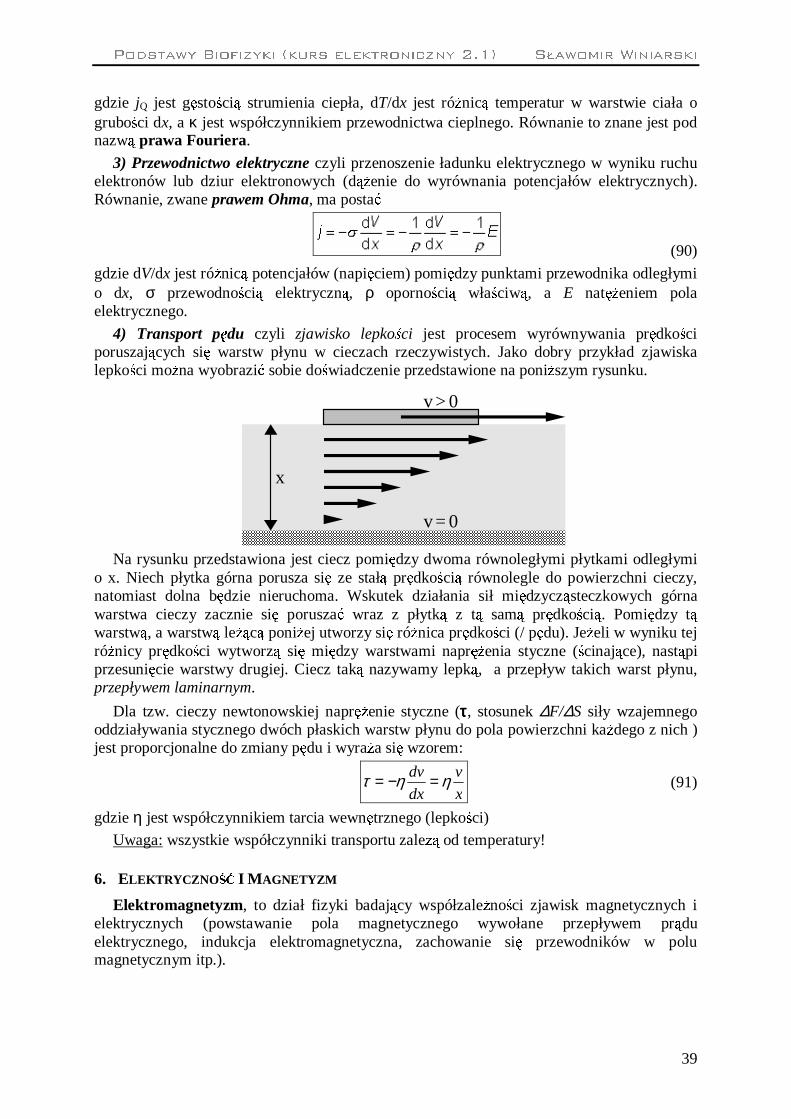
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
39
gdzie jQ jest gęstością strumienia ciepła, dT/dx jest róŜnicą temperatur w warstwie ciała o grubości dx, a κ jest współczynnikiem przewodnictwa cieplnego. Równanie to znane jest pod nazwą prawa Fouriera.
3) Przewodnictwo elektryczne czyli przenoszenie ładunku elektrycznego w wyniku ruchu elektronów lub dziur elektronowych (dąŜenie do wyrównania potencjałów elektrycznych). Równanie, zwane prawem Ohma, ma postać
(90)
gdzie dV/dx jest róŜnicą potencjałów (napięciem) pomiędzy punktami przewodnika odległymi o dx, σ przewodnością elektryczną, ρ opornością właściwą, a E natęŜeniem pola elektrycznego.
4) Transport pędu czyli zjawisko lepkości jest procesem wyrównywania prędkości poruszających się warstw płynu w cieczach rzeczywistych. Jako dobry przykład zjawiska lepkości moŜna wyobrazić sobie doświadczenie przedstawione na poniŜszym rysunku.
v> 0
x
v= 0
Na rysunku przedstawiona jest ciecz pomiędzy dwoma równoległymi płytkami odległymi o x. Niech płytka górna porusza się ze stałą prędkością równolegle do powierzchni cieczy, natomiast dolna będzie nieruchoma. Wskutek działania sił międzycząsteczkowych górna warstwa cieczy zacznie się poruszać wraz z płytką z tą samą prędkością. Pomiędzy tą warstwą, a warstwą leŜącą poniŜej utworzy się róŜnica prędkości (/ pędu). JeŜeli w wyniku tej róŜnicy prędkości wytworzą się między warstwami napręŜenia styczne (ścinające), nastąpi przesunięcie warstwy drugiej. Ciecz taką nazywamy lepką, a przepływ takich warst płynu, przepływem laminarnym.
Dla tzw. cieczy newtonowskiej napręŜenie styczne (ττττ, stosunek ∆F/∆S siły wzajemnego oddziaływania stycznego dwóch płaskich warstw płynu do pola powierzchni kaŜdego z nich ) jest proporcjonalne do zmiany pędu i wyraŜa się wzorem:
x
v
dx
dv ηητ =−= (91)
gdzie η jest współczynnikiem tarcia wewnętrznego (lepkości)
Uwaga: wszystkie współczynniki transportu zaleŜą od temperatury!
6. ELEKTRYCZNO ŚĆ I MAGNETYZM
Elektromagnetyzm, to dział fizyki badający współzaleŜności zjawisk magnetycznych i elektrycznych (powstawanie pola magnetycznego wywołane przepływem prądu elektrycznego, indukcja elektromagnetyczna, zachowanie się przewodników w polu magnetycznym itp.).

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
40
++ —— F1 F2
Początek elektromagnetyzmowi dały prace H.Ch. Oersteda (odkrycie powstawania pola magnetycznego wokół przewodnika, przez który płynie prąd elektryczny, 1820), J.B. Biota i F. Savarta. Dalsze etapy jego rozwoju wyznaczają m.in. badania A.M. Ampere'a, M. Faradaya i J.C. Maxwella.
6.1. ELEKTROSTATYKA Elektrostatyka, to część elektrodynamiki klasycznej dotycząca zagadnień związanych z
statycznymi polami elektrycznymi i spoczywającymi ładunkami elektrycznymi.
6.1.1. Spoczywający ładunek elektryczny
Na spoczywający ładunek działają siły elektrostatyczne pochodzące od innych ładunków. Dwa ładunki róŜnoimienne (patrz rysunek) przyciągają się elektrostatyczną siłą Coulomba równą co do wartości:
221
021 4
1
r
qqFF
rεπε== ( 92)
Pole elektryczne, jakie powstaje pomiędzy tymi ładunkami równe jest natęŜeniu pola działającego na ładunek próbny pochodzące od ładunku q:
2
00 4
1
r
q
q
FE
rεπε== (93)
Pole jednorodne powstające pomiędzy okładkami naładowanego kondensatora6 jest róŜnicą potencjałów (napięciem) pomiędzy jego okładkami podzieloną przez odległość tych okładek:
d
U
dE =
−= 21 ϕϕ
(94)
Pojemność takiego kondensatora (kondensatora płaskiego) wyraŜa się wzorem:
d
S
U
QC rεε 0== , (95)
gdzie Q jest całkowitym ładunkiem zgromadzonym na płytkach kondensatora, er przenikalnością elektryczną warstwy izolującej kondensator, S powierzchnią okładek kondensatora.
6.2. ELEKTRODYNAMIKA Elektrodynamika zajmuje się uporządkowanym ruchem (przepływem) ładunków, czyli
prądem elektrycznym. Ciała, w których istnieją ładunki swobodne (tzw. nośniki prądu elektrycznego) mogące się swobodnie poruszać pod wpływem przyłoŜonego, zewnętrznego pola, nazywa się przewodnikami, natomiast ciała, które nie posiadają swobodnych nośników nazywa się izolatorami.
6 kondensator elektryczny – układ dwóch lub więcej przewodników (okładki) odizolowanych od siebie próŜnią lub dielektrykiem (warstwa izolująca) posiadający własność gromadzenia ładunków elektrycznych pod wpływem przyłoŜonego napięcia elektrycznego U. Przykładając napięcie do okładek kondensatora powodujemy ładowanie kondensatora polegające na przemieszczeniu z jednej okładki ładunków jednego znaku na drugą i stworzeniu róŜnicy potencjałów.

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
41
Istnieje grupa ciał zmieniająca właściwości przewodzenia pod wpływem warunków zewnętrznych (np. temperatury) są to tzw. półprzewodniki. Do przewodników zalicza się przede wszystkim metale (np. srebro, miedź, aluminium) ale i ciecze (elektrolity7), do izolatorów zalicza się gazy, oraz ciała stałe (tj. woda destylowana, oleje, smary, guma, szkło, papier, drewno). Do najczęściej wykorzystywanych półprzewodników moŜna zaliczyć krzem, german, arsen.
6.2.1. Rodzaje prądu Prąd elektryczny, pod względem natęŜenia, dzieli się na prąd stały i prąd zmienny. Prąd
stały płynie w stałym kierunku i ma stałe natęŜenie. Prąd zmienny ma zaleŜne od czasu, zmienne natęŜenie i oscyluje ono wokół wartości średniej. Czas powtórzenia oscylacji nazywa się okresem, natomiast liczbę okresów w jednej sekundzie nazywa się częstotliwością.
Prąd zmienny ma naturę falową. Drgające cząsteczki wpływają na ruch następnych poruszają się w sposób uporządkowany w tej samej fazie drgań. Długość fali związana jest z okresem drgań zaleŜnością: λ=cT=1/f , podobnie jak przy falach mechanicznych. Znaczy to, Ŝe im większa częstotliwość drgań prądu tym krótsza jest długość fali. Od czasu trwania okresu i wysokości amplitudy fali (/natęŜenia) zaleŜy działanie draŜniące prądu.[]
Występujący w sieci elektrycznej prąd zmienny o częstotliwości 50Hz musi być zmieniony (zmodulowany) zanim zostanie zastosowany w elektroterapii. Po przepuszczeniu takiego prądu przez prostownik (filtr) zostaje z niego tylko jedna połówka (dodatnia lub ujemna) – prostowanie jednokierunkowe. Podczas prostowania całkowitego następuje ‘odbicie’ ujemnych wartości prądu tak, Ŝe prąd wyjściowy ma dwukrotnie większą częstotliwość (czyli w naszym przyp. 100Hz). Częstotliwość fal moŜna modulować zmieniając ilość połówek fali przechodzących przez prostownik.
Prądy wykorzystywane w elektrolecznictwie moŜna podzielić na prądy:
1. małej częstotliwości (od 0Hz do 1kHz) + prąd galwaniczny (wyk. w galwanizacji, elektrolizie, jonoforezie, kąpielach elektryczno-wodnych )
2. średniej częstotliwości (od 1kHz do 100kHz) – prądy zmienne, interferencyjne, modulowane średniej częstotliwości;
3. wysokiej częstotliwości (od 500kHz do 5000MHz) – fale krótkie (o długości λ=11m), fale decymetrowe (λ=0,7m), mikrofalowe (λ=0,125m);
( Kontynuacja, patrz rozdział: Elektrolecznictwo)
6.2.2. Charakterystyka prądu elektrycznego Prąd elektryczny moŜna scharakteryzować za pomocą podania następujących parametrów: NatęŜenie prądu, I, jest miarą ilości elektryczności (ładunku) przepływającej przez przekrój jakiegoś przewodnika w ciągu sekundy. W układzie jednostek SI wyraŜa się w amperach [A]:
t
qI
∆∆= (96)
7 elektrolitami nazywamy przewodniki elektryczne zawierające ruchome jony. Są nimi najczęściej roztwory wodne soli, kwasów i zasad oraz roztopione kryształy jonowe (np. soli kuchennej). Pod wpływem pola elektrycznego dysocjuj ą na jony (np. kwas siarkowy na kationy wodorkowe i aniony reszt kwasowych);

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
42
Gęstość prądu elektrycznego, j oznacza stosunek natęŜenia prądu (I) do wielkości powierzchni, przez który ten prąd przepływa (S):
S
Ij = (97)
W medycynie zabiegowej wartość gęstości prądu elektrycznego podaje się w miliamperach na centymetr2 [mA/cm2].
Gęstość prądu jest związana z wartością pola elektrycznego (E) poprzez wzór:
Ej ⋅= σ (98)
gdzie σ – przewodnictwo właściwe (przewodność) wyraŜone w (Ωm)-1.
Opór elektryczny, R, na jaki natrafia przepływający prąd zaleŜy od kształtu (długości l i przekroju S) i właściwości elektrycznych (oporności właściwej ρρρρ) przewodnika:
S
lR ⋅= ρ , (99)
gdzie oporność właściwa jest odwrotnością przewodności właściwej: ρρρρ=1/σσσσ i wyraŜona jest w tzw. omometrach (Ω.m). Przewodnictwo elektryczne – to odwrotność oporu elektrycznego:
]1
[ 1
SR
=Ω
=κ (100)
i wyraŜone jest w simensach (ozn. S) Jak juŜ wspomniano opór (/oporność) właściwy charakteryzuje właściwości elektryczne
materiału przewodnika i tak:
- dla ρ < 10-6 Ωm materiałem jest przewodnik;
- dla 10-6Ωm>ρ<108Ωm materiałem jest półprzewodnik;
- dla ρ > 108Ωm materiałem jest izolator; Pomiędzy natęŜeniem przepływającego prądu przez przewodnik (I ) a spadkiem napięcia na
tym przewodniku (U) zachodzi liniowa zaleŜność, zwana prawem Ohma :
IRU ⋅= [V = Ω . A] (101)
gdzie stała proporcjonalności R nazywana jest oporem elektrycznym (in. rezystancją). Prawo Ohma mówi, Ŝe, w stałej temperaturze, natęŜenie prądu (I) jest wprost proporcjonalne do spadku napięcia na przewodniku (U), a stałą proporcjonalności jest opór elektryczny R;
Prawo Ohma dotyczy prądu stałego i prądu zmiennego niskoczęstotliwościowego. Nie jest spełnione natomiast dla prądu zmiennego (wysokoczęstotliwościowego).
Skóra ludzka (naskórek) posiada pewien (stosunkowo duŜy) opór elektryczny oraz opór pojemnościowy. MoŜna ją traktować jako izolator. Opór całkowity skóry zmniejsza się wraz ze wzrostem częstotliwości impulsów elektrycznych. W układach elektrycznych oporniki (odbiorniki elektryczne) moŜna łączyć w obwodach
szeregowo (koniec poprzedniej części jest początkiem nowej części) lub równolegle (osobno łączy się wejścia odbiorników i ich wyjścia). ZaleŜności pomiędzy natęŜeniami, spadkami napięć i opornościami przedstawione zostały w tabeli poniŜej:

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
43
Tabela 8. RóŜnice pomiędzy połączeniem szeregowym (nierozgałęzionym) a równoległym (rozgałęzionym). W połączeniu szeregowym prąd płynący przez kaŜdy rezystor ma taką samą wartość, natomiast suma spadków napięć na kaŜdym rezystorze równa jest całkowitem spadkowi napięcia w obwodzie. Dla połączenia równoległego napięcia na poszczególnych rezystorach są sobie równe i równe spadkowi napięcia w całym układzie, natomiast prąd rozgłęzia się na sumaryczne składowe.
POŁĄCZENIE NATĘśENIE NAPIĘCIE OPÓR ZASTĘPCZY szeregowe
R1 R2 RN
I=I1=I2=...=IN U=U1+U2+...+UN R=R1+R2+...+RN
równoległe
R1
R2
RN
I=I1+I2+...+IN U=U1=U2=...=UN NRRRR
1...
111
21
+++=
Praca prądu elektrycznego jest to iloczyn spadku napięcia na odbiorniku i przenoszonego ładunku:
tIUQUW ⋅⋅=⋅= (102)
i wyraŜa się najczęściej w dŜulach lub w elektronowoltach8 [1eV = 1,6.10-19 J]. Moc prądu elektrycznego, to stosunek średniej pracy prądu elektrycznego ∆W wykonywanej w odcinku czasu ∆t:
IUt
WP ⋅=
∆∆= (103)
6.2.3. Prąd zmienny, impedancja (zawada) układu RLC: Impedancja (zawada) układu zawierającego opornik (rezystor), solenoid (zwojnica, cewka)
i kondensator, to inaczej opór zastępczy takiego układu i wyraŜa się wzorem:
22 1 −+=
ωω
CLRZ (104)
gdzie: R-opór omowy, L-indukcyjność solenoidu, C-Pojemność kondensatora, natomiast ω-częstotliwość kołowa (częstość) i ma związek z częstotliwością poprzez wzór: .ω = 2π.f .
6.2.4. Transport jonów w błonach i potencjały błonowe. Pole elektryczne, E, przenoszące jony przez błonę komórkową wyraŜa się podobnym wzorem jak pole elektryczne wewnątrz kondensatora:
d
UE m= , (105)
gdzie: Um – spoczynkowy potencjał membranowy (błonowy) – określa róŜnicę potencjałów elektrycznych pomiędzy wnętrzem i zewnętrzem komórki;
8 jeden elektronowolt (1eV) jest to praca potrzebna na przeniesienie elementarnego ładunku elektrycznego przez róŜnicę potencjałów równą 1V.
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
44
natęŜenie prądu, I
I=const.
czas, t
d – grubość błony komórkowej;
Wartości potencjałów spoczynkowych dla niektórych komórek przedstawione zostały w poniŜszej tabeli:
Rodzaj komórki Potencjał spoczynkowy Akson kałamarnicy - 70 mV
Komórka mięśniowa - 90 mV Erytrocyt - 10 mV
Neuron kota - 80 mV
6.2.5. Wpływ prądu stałego na organizm Ciało człowieka pod względem elektrycznym składa się z układu szeregowo lub
równolegle połączonych komórek, tkanek, elektrolitów o róŜnym przewodnictwie elektrycznym. Tkanki i płyny ustrojowe wykazują róŜnice w przewodnictwie elektrycznym, które zaleŜą przede wszystkim od uwodnienia i nasycenia (stęŜenia) elektrolitów. Największe przewodnictwo elektryczne wykazuje płyn mózgowo-rdzeniowy, później w kolejności malejącej: osocze krwi, krew, mięśnie, wątroba, mózg, tkanka łączna, tkanka kostna. W zabiegach elektroleczniczych naleŜy pamiętać o słabym przewodnictwie skóry (duŜa oporność). Prąd przepływa zawsze drogą o najmniejszym oporze elektrycznym. [].
Przepływowi przez tkanki towarzyszy szereg zjawisk elektrochemicznych (elektroliza), elektrokinetycznych (elektroforeza i elektroosmoza) i elektrotermicznych (prawo Joule’a-Lenza) scharakteryzowanych pokrótce poniŜej: Elektroliza – rozpad elektrolitu na jony pod wpływem przepływu prądu elektrycznego,
połączony z odkładaniem się substancji na elektrodach; Elektroforeza - ruch ładunków elektrolitu (zawiesiny lub cieczy) pod wpływem przyłoŜonego zewnętrznego pola elektrycznego (cząstki obdarzone ładunkiem ujemnym poruszają się w kierunku elektrody dodatniej (katody), dodatnim – w stronę anody); Elektroosmoza – ruch jonów przez przegrodę (lub kapilarę) pod wpływem przyłoŜonego zewnętrznego pola elektrycznego; Prawo Joule’a - Lenza – prawo określające ilość ciepła wydzielającą się w przewodniku (tkance) o oporze R przy przepływie prądu o natęŜeniu I w ciągu czasu t:
RtIQ 2= (106)
6.2.6. Elektroterapia w „pigułce” Prąd elektryczny wykorzystywany w fizjoterapii moŜna podzielić na: Prąd stały.
Galwanizacja, to uŜycie w zabiegu prądu stałego;
Jontoforeza (inaczej: jontogalwanizacja), to zabieg polegający na wprowadzeniu do ciała pacjenta, przy pomocy prądu galwanicznego, leczniczo działających jonów. Zabieg ten moŜe być wykonywany z zastosowaniem wanny (komory) napełnionej wodą lub roztworem leków (kąpiele wielokomorowe);
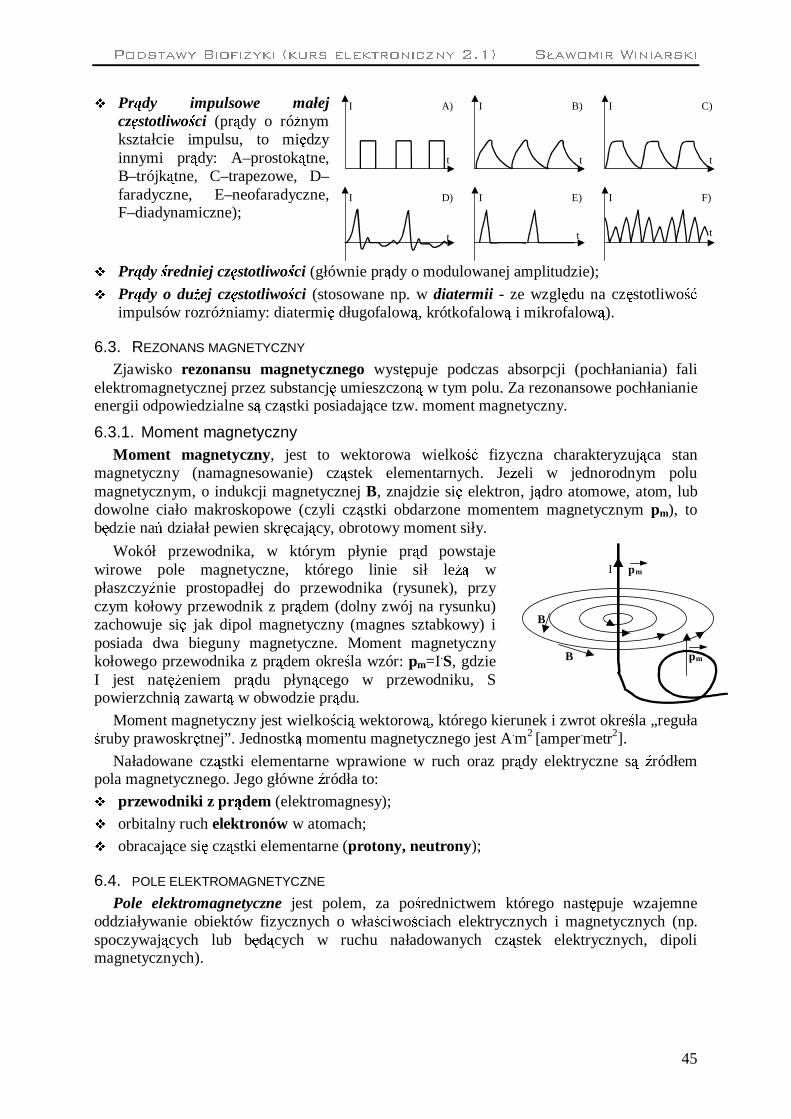
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
45
I B)
t
I A)
t
I C)
t
I E)
t
I D)
t
I F)
t
Prądy impulsowe małej częstotliwości (prądy o róŜnym kształcie impulsu, to między innymi prądy: A–prostokątne, B–trójkątne, C–trapezowe, D–faradyczne, E–neofaradyczne, F–diadynamiczne); Prądy średniej częstotliwości (głównie prądy o modulowanej amplitudzie); Prądy o duŜej częstotliwości (stosowane np. w diatermii - ze względu na częstotliwość impulsów rozróŜniamy: diatermię długofalową, krótkofalową i mikrofalową).
6.3. REZONANS MAGNETYCZNY Zjawisko rezonansu magnetycznego występuje podczas absorpcji (pochłaniania) fali
elektromagnetycznej przez substancję umieszczoną w tym polu. Za rezonansowe pochłanianie energii odpowiedzialne są cząstki posiadające tzw. moment magnetyczny.
6.3.1. Moment magnetyczny Moment magnetyczny, jest to wektorowa wielkość fizyczna charakteryzująca stan
magnetyczny (namagnesowanie) cząstek elementarnych. JeŜeli w jednorodnym polu magnetycznym, o indukcji magnetycznej B, znajdzie się elektron, jądro atomowe, atom, lub dowolne ciało makroskopowe (czyli cząstki obdarzone momentem magnetycznym pm), to będzie nań działał pewien skręcający, obrotowy moment siły.
Wokół przewodnika, w którym płynie prąd powstaje wirowe pole magnetyczne, którego linie sił leŜą w płaszczyźnie prostopadłej do przewodnika (rysunek), przy czym kołowy przewodnik z prądem (dolny zwój na rysunku) zachowuje się jak dipol magnetyczny (magnes sztabkowy) i posiada dwa bieguny magnetyczne. Moment magnetyczny kołowego przewodnika z prądem określa wzór: pm=I.S, gdzie I jest natęŜeniem prądu płynącego w przewodniku, S powierzchnią zawartą w obwodzie prądu.
Moment magnetyczny jest wielkością wektorową, którego kierunek i zwrot określa „reguła śruby prawoskrętnej”. Jednostką momentu magnetycznego jest A.m2 [amper.metr2].
Naładowane cząstki elementarne wprawione w ruch oraz prądy elektryczne są źródłem pola magnetycznego. Jego główne źródła to: przewodniki z prądem (elektromagnesy); orbitalny ruch elektronów w atomach; obracające się cząstki elementarne (protony, neutrony);
6.4. POLE ELEKTROMAGNETYCZNE Pole elektromagnetyczne jest polem, za pośrednictwem którego następuje wzajemne
oddziaływanie obiektów fizycznych o właściwościach elektrycznych i magnetycznych (np. spoczywających lub będących w ruchu naładowanych cząstek elektrycznych, dipoli magnetycznych).
I pm
B
B pm
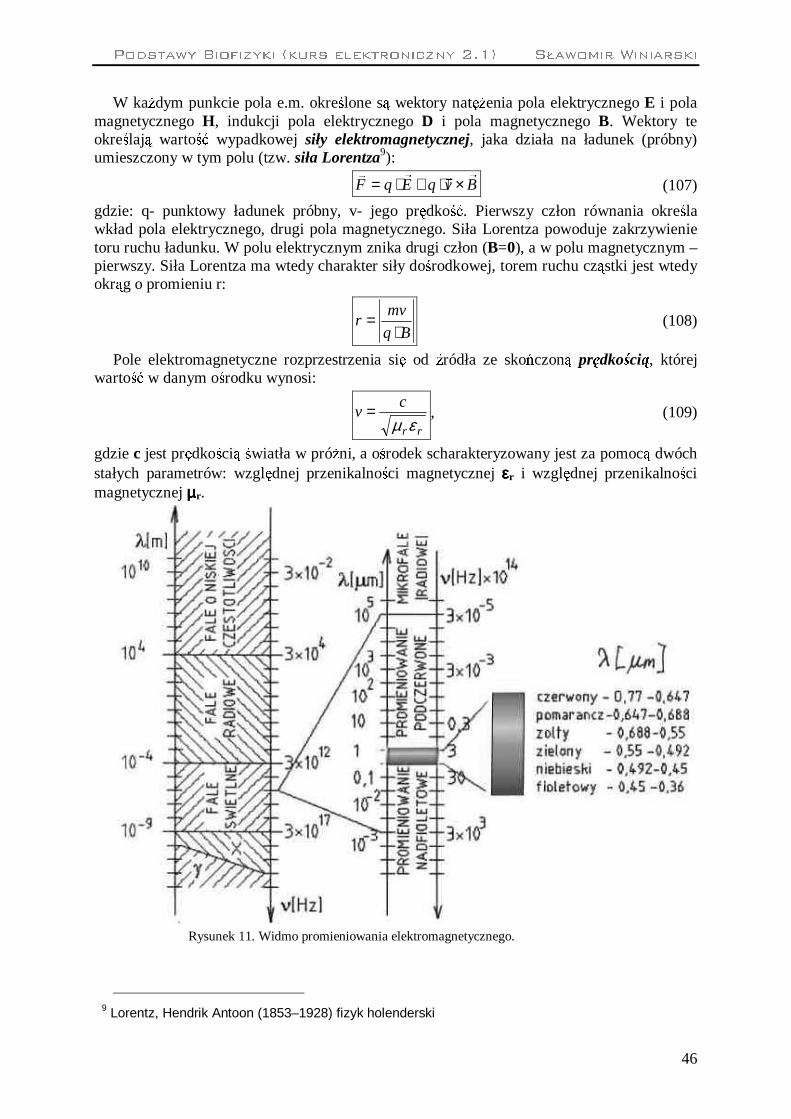
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
46
W kaŜdym punkcie pola e.m. określone są wektory natęŜenia pola elektrycznego E i pola magnetycznego H, indukcji pola elektrycznego D i pola magnetycznego B. Wektory te określają wartość wypadkowej siły elektromagnetycznej, jaka działa na ładunek (próbny) umieszczony w tym polu (tzw. siła Lorentza9):
BvqEqFrrrv
×⋅+⋅= (107)
gdzie: q- punktowy ładunek próbny, v- jego prędkość. Pierwszy człon równania określa wkład pola elektrycznego, drugi pola magnetycznego. Siła Lorentza powoduje zakrzywienie toru ruchu ładunku. W polu elektrycznym znika drugi człon (B=0), a w polu magnetycznym –pierwszy. Siła Lorentza ma wtedy charakter siły dośrodkowej, torem ruchu cząstki jest wtedy okrąg o promieniu r:
Bq
mvr
⋅= (108)
Pole elektromagnetyczne rozprzestrzenia się od źródła ze skończoną prędkością, której wartość w danym ośrodku wynosi:
rr
cv
εµ= , (109)
gdzie c jest prędkością światła w próŜni, a ośrodek scharakteryzowany jest za pomocą dwóch stałych parametrów: względnej przenikalności magnetycznej εεεεr i względnej przenikalności magnetycznej µµµµr.
Rysunek 11. Widmo promieniowania elektromagnetycznego.
9 Lorentz, Hendrik Antoon (1853–1928) fizyk holenderski

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
47
Wysyłane przez słońce promieniowanie elektromagnetyczne rozciąga się od promieniowania γ (gamma) przez promieniowanie rentgenowskie, nadfioletowe, widzialne i podczerwone, aŜ do fal radiowych (patrz rysunek). Składa się ono w ok. 40% z promieniowania widzialnego, w ok. 60% promieniowania podczerwonego i ok. 2-3% promieniowania nadfioletowego. Do ziemi dociera zaledwie 30% promieniowania słonecznego. Reszta absorbowana jest przez atmosferę ziemską.
KaŜdy element światła słonecznego wywiera biologicznie istotny wpływ na organizm człowieka Światło widzialne polepsza samopoczucie i jest źródłem radości. Światło czerwone (650nm) wywiera pobudzający wpływ na psychikę człowieka, łagodzi podraŜnienia skóry powstające np. podczas przedawkowania promieni UV. Światło niebieskie (400nm) działa uspokajająco i zmniejsza ból. Stosuje się je do naświetleń miejscowych przy krwawych wysiękach w stawach, po urazach, w nerwobólach, świądzie, zapaleniu Ŝył, zaburzeniach krąŜenia, cukrzycy, odmroŜeniach.
6.4.1. Powstawanie światła laserowego Według teorii budowy atomu Bohra10: w centrum atomowym znajduje się dodatnie
naładowane jądro atomowe wokół którego „krąŜą” ujemnie naładowane elektrony w takiej liczbie, aby wypadkowy ładunek atomu był równy zero. Liczne poziomy energetyczne w atomach i cząsteczkach pozwalają elektronom na przejścia między-orbitalne.
Promień n-tej orbity Bohra dany jest przez wyraŜenie:
21
220
2
nrnme
hrn ⋅=⋅=
πε
, (110)
natomiast energia n-tego poziomu zaleŜnością:
21220
2
4 11
8 nE
nh
meEn ⋅−=⋅−=
ε, (111)
gdzie: h=6,62.10-34J.s jest stałą Plancka, m i e=1.6·10-19C są odpowiednio masą i ładunkiem elektronu, r1=0,0503 nm i E1=–13.6 eV odpowiednio promieniem i energią na pierwszej
orbicie elektronowej, ε0 = 8.854·10-12C2/(Nm2) przenikalnością elektryczną próŜni, natomiast n numeruje kolejne poziomy (orbity) elektronowe i nazywane jest główną liczbą kwantową.
Elektron przeskakując z jednego poziomu na drugi wypromieniowuje lub pochłania kwant energii (tzw. foton, por. rysunek poniŜej). Kwant energii to najmniejsza porcja energii jaką niesie ze sobą foton i równa jest róŜnicy energii pomiędzy poziomami atomu:
nn EEfhE −=⋅=∆ +1 (112)
gdzie. f jest częstotliwością fali świetlnej (kwantu promieniowania).
10 Niels Bohr (1885–1962) fizyk duński
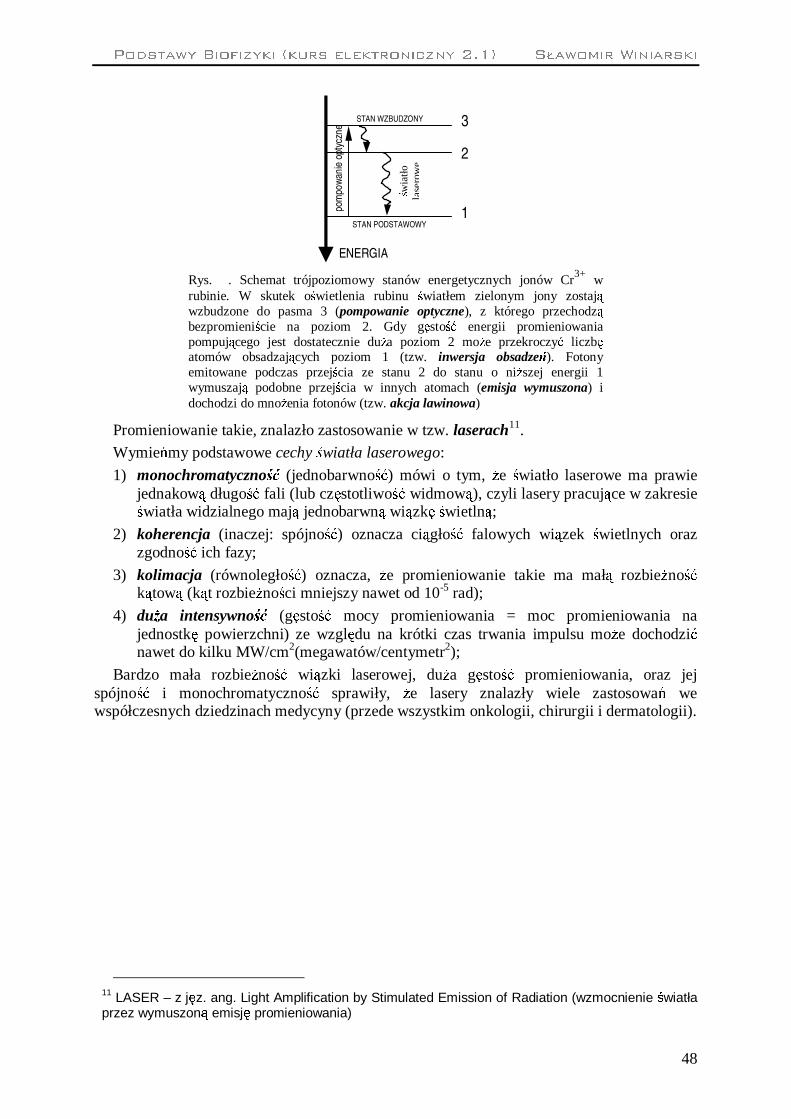
Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
48
STAN WZBUDZONY 3
2
1 STAN PODSTAWOWY
ENERGIA
pom
pow
anie
opt
yczn
e światło lase
row
e
Rys. . Schemat trójpoziomowy stanów energetycznych jonów Cr3+ w rubinie. W skutek oświetlenia rubinu światłem zielonym jony zostają wzbudzone do pasma 3 (pompowanie optyczne), z którego przechodzą bezpromieniście na poziom 2. Gdy gęstość energii promieniowania pompującego jest dostatecznie duŜa poziom 2 moŜe przekroczyć liczbę atomów obsadzających poziom 1 (tzw. inwersja obsadzeń). Fotony emitowane podczas przejścia ze stanu 2 do stanu o niŜszej energii 1 wymuszają podobne przejścia w innych atomach (emisja wymuszona) i dochodzi do mnoŜenia fotonów (tzw. akcja lawinowa)
Promieniowanie takie, znalazło zastosowanie w tzw. laserach11.
Wymieńmy podstawowe cechy światła laserowego:
1) monochromatyczność (jednobarwność) mówi o tym, Ŝe światło laserowe ma prawie jednakową długość fali (lub częstotliwość widmową), czyli lasery pracujące w zakresie światła widzialnego mają jednobarwną wiązkę świetlną;
2) koherencja (inaczej: spójność) oznacza ciągłość falowych wiązek świetlnych oraz zgodność ich fazy;
3) kolimacja (równoległość) oznacza, Ŝe promieniowanie takie ma małą rozbieŜność kątową (kąt rozbieŜności mniejszy nawet od 10-5 rad);
4) duŜa intensywność (gęstość mocy promieniowania = moc promieniowania na jednostkę powierzchni) ze względu na krótki czas trwania impulsu moŜe dochodzić nawet do kilku MW/cm2(megawatów/centymetr2);
Bardzo mała rozbieŜność wiązki laserowej, duŜa gęstość promieniowania, oraz jej spójność i monochromatyczność sprawiły, Ŝe lasery znalazły wiele zastosowań we współczesnych dziedzinach medycyny (przede wszystkim onkologii, chirurgii i dermatologii).
11 LASER – z jęz. ang. Light Amplification by Stimulated Emission of Radiation (wzmocnienie światła przez wymuszoną emisję promieniowania)

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
49
Rys . Typy niektórych laserów uŜywanych w medycynie. Za [Jaroszyk, 1993]
7. PROMIENIOWANIE CIEPLNE
Promieniowanie cieplne (in. termiczne), to promieniowanie elektromagnetyczne ciał związane ze wzbudzaniem atomów, jonów lub cząsteczek do drgań związanych z ich ruchem cieplnym. NatęŜenie i barwa światła wchodzącego w skład promieniowania cieplnego zaleŜą od własności fizycznych ciała oraz jego temperatury. Wszystkie ciała o temperaturze wyŜszej niŜ 0K12 są źródłem promieniowania (zwykle jest to promieniowanie tła) cieplnego. Ogólnie promieniowanie cieplne staje się widoczne (leŜy w zakresie fal widzialnych), kiedy jego temperatura przekroczy ok. 500oC. W tej temperaturze ciała mają barwę ciemno czerwoną, a w miarę podgrzewania ich barwa zmienia się z jasno czerwonej, poprzez Ŝółte, zielone, biało-niebieskie do niebieskiej.
Wielkością charakteryzującą promieniowanie jest tzw. zdolność emisyjna. Zdolność emisyjna (strumień energii wysyłanej) jest wielkością charakteryzującą promieniowanie cieplne emitowane przez dane ciało i równa jest mocy ∆∆∆∆P tego promieniowania wysyłanego z jednostki powierzchni ∆∆∆∆S tego ciała, czyli:
St
E
S
PTfE
def
∆⋅=
∆∆=
.
),( (113)
Podobnie definiuje się zdolność ciała do pochłaniania (absorpcji) fali elektromagnetycznej. Zdolność absorpcyjna jest to stosunek mocy promieniowania pochłoniętego (∆P) przez jednostkową powierzchnie tego ciała (∆S)
St
E
S
PTfA
def
∆⋅=
∆∆=
.
),( . (114)
Zdolność emisyjna ciała rzeczywistego E(f,T), oraz zdolność absorpcyjna A(f,T) zaleŜą od częstotliwości fali promieniowania f i temperatury T, składu chemicznego i stanu skupienia danego ciała.
12 przypomnienie: 0K (zero bezwzględne) = –273oC

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
50
Ciało, dla którego zdolność absorpcyjna niezaleŜnie od częstotliwości promieniowania jest równe 1 (A=1, tzn. pochłania kaŜdą ilość promieniowania cieplnego) nazywamy ciałem doskonale czarnym. Ciało nie absorbujące promieniowania niezaleŜnie od jego częstotliwości, dla którego zdolność absorpcyjna jest równa 0 (A=0) nazywamy ciałem białym. Są to skrajne, wyidealizowane przypadki, poniewaŜ wszystkie rzeczywiste ciała mają zdolność absorpcyjną w przedziale: 0<A<1. Ciała rzeczywiste pod względem ich charakterystyki promieniowania nazywamy ciałami kolorowymi.
Przykładem ciała doskonale czarnego moŜe być wnętrze światłoszczelnej wnęki pokazanej na rysunku obok. Promieniowanie, które absorbuje ciało doskonale czarne ulega rozproszeniu na wewnętrznych ściankach wnęki tak, Ŝe na zewnątrz nie wydostaje się juŜ nic.
Ciało rzeczywiste będące w równowadze termodynamicznej z otoczeniem emituje taką samą ilość promieniowania, co absorbuje z otoczenia. Promieniowanie takie nazywa się promieniowaniem zrównowaŜonym.
Związek pomiędzy zdolnością emisyjną a zdolnością absorpcyjną ciała określa prawo promieniowania Kirchhoffa.
7.1. PRAWO PROMIENIOWANIA KIRCHHOFFA Prawo promieniowania Kirchhoffa stwierdza, Ŝe: stosunek zdolności emisyjnej (E) do
zdolności absorpcyjnej (A) jest dla wszystkich ciał jednakowy.
( )TfE
TfATf
,
),(),( =ε (115)
Funkcja ε=ε(f,T) jest niezaleŜną od ciała uniwersalną funkcją temperatury i częstotliwości promieniowania i nazywamy funkcj ą Kirchoffa lub zdolnością emisyjną ciała doskonale czarnego.
Zdolność ciała do emisji promieniowania oraz do jego absorpcji są do siebie wprost proporcjonalne: Ze stwierdzenia tego wynika, Ŝe ciało tym intensywniej promieniuje, im intensywniej pochłania padające nań promieniowanie. Dlatego wskutek promieniowania termicznego gorąca, czarna kawa szybciej stygnie niŜ gorąca, przeźroczysta woda (Im ciemniejsze ciało, tym szybciej nagrzewa się i stygnie).
7.2. PRAWO PROMIENIOWANIA PLANCKA Prawo promieniowania Plancka określa zaleŜność zdolności emisyjnej ciała doskonale
czarnego od częstotliwości f i jego temperatury T:
1
1),(
/ −⋅=
⋅⋅ TkfheCTfE , (116)
gdzie: stała C=2πhf3/c2, h jest stałą Plancka, c prędkością światła w próŜni, natomiast k stałą Boltzmanna. Zdolność emisyjna opisana powyŜszą funkcją ma kształt jak na rysunku poniŜej.

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
51
E(λ,T) T4
T3
T2
T1
λ λmax4 λmax1
Rys. . Zdolność emisyjna ciała doskonale czarnego, E(f,T) zaleŜy od częstotliwości fali elektromagnetycznej (lub długości fali, λ) oraz od temperatury tego ciała. W miarę zwiększania temperatury moŜna zauwaŜyć charakterystyczne przesunięcie maksimum promieniowania w kierunku krótszych długości fal (większych częstotliwości). Linią przerywaną zaznaczono zaleŜność maksymalnej długości fali, λmax , od temperatury (→prawo Wiena).
Wzór ( ) podany przez Plancka bardzo dobrze opisuje wyniki doświadczalne i nie da się go wyprowadzić korzystając z praw fizyki klasycznej. Wzór opiera się na załoŜeniu, Ŝe atomy i cząsteczki mogą wysyłać i pochłaniać promieniowanie tylko „porcjami” energetycznymi, zwanymi kwantami energii. Prawo to stanowi fundament mechaniki kwantowej.
Z prawa promieniowania Plancka wynika prawo przesunięć Wiena.
7.3. PRAWO PRZESUNIĘĆ WIENA: Prawo przesunięć Wiena orzeka, Ŝe maksymalna długość fali, odpowiadająca
maksymalnej emisji promieniowania ciała doskonale czarnego, jest odwrotnie proporcjonalna do temperatury bezwzględnej ciała T:
T
bMAX =λ , (117)
gdzie b=0,29.10-2 mK jest stałą Wiena. Wzór ten orzeka, Ŝe ze wzrostem temperatury bezwzględnej ciała doskonale czarnego
maksymalna długość fali (odpowiadająca maksymalnej emisji) przesuwa się w kierunku krótszych długości fal (większych częstotliwości), co przejawia się zmianą barwy promieniującego ciała. Znając barwę świecącego ciała moŜna, przy pomocy prawa Wiena, określić jego temperaturę i na odwrót.
7.4. PRAWO PROMIENIOWANIA STEFANA – BOLTZMANNA: Prawo Stefana - Boltzmanna z kolei stwierdza, Ŝe całkowity strumień energii
promieniowania cieplnego (zdolność emisyjna) ciała doskonale czarnego jest proporcjonalny do czwartej potęgi temperatury:
4)( TTE ⋅= σ , (118)
gdzie σσσσ=5,67.10-8 [J/sm2K4] jest stałą Stefana-Boltzmanna. Prawo Stefana-Boltzmanna moŜna zastosować równieŜ dla ciał szarych oraz ciał
rzeczywistych. Dla ciał szarych i rzeczywistych stała proporcjonalności pomiędzy emitancją a T4 wynosi: σσσσ....A, gdzie A jest zdolnością absorpcyjną tego ciała:
4)( TATE ⋅= σ (119)

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
52
7.5. TERMOGRAFIA Temperatura skóry człowieka jest waŜnym czynnikiem diagnostycznym pomagającym
ustalić stan pacjenta. Temperatura skóry jest bowiem wynikiem dynamicznej równowagi cieplnej pomiędzy ciepłem dostarczanym na przemiany metaboliczne przez naczynia krwionośne, przewodnictwo cieplne tkanek a ciepłem wypromieniowywanym do otoczenia przez promieniowanie, przewodnictwo cieplne i konwekcję. Ogniska chorobowe powodują zmianę temperatury tkanek, poniewaŜ wpływają one na wyŜej wymienione czynniki. [Jaroszyk]
Najprostszym przyrządem diagnostycznym jest termometr, uŜyty po raz pierwszy ok. 1865 roku. Do urządzeń bardziej zaawansowanych naleŜy zaliczyć aparat termograficzny.
Aparat termograficzny reaguje na promieniowanie cieplne wysyłane przez ciało człowieka. Najistotniejszym elementem termografu jest detektor promieniowania podczerwonego, który przetwarza padające promieniowanie na proporcjonalny do jego mocy sygnał elektryczny, który później jest wzmacniany i analizowany przez system przetworników.
8. PROMIENIOWANIE NIEJONIZUJ ĄCE (W PRZYGOTOWANIU ):
9. PROMIENIOWANIE JONIZUJĄCE: (W PRZYGOTOWANIU )

Podstawy Biofizyki (kurs elektroniczny 2.1) Sławomir Winiarski
53
10. UZUPEŁNIENIA
10.1. ALFABET GRECKI.
α, Α alfa ι, Ι jota ρ, Ρ rho β, Β beta κ, Κ kappa σ, Σ sigma γ, Γ gamma λ, Λ lambda τ, Τ tau δ, ∆ delta µ, Μ mi υ, Υ ypsilon ε, Ε epsilon ν, Ν ni φ,ϕ; Φ fi ζ, Ζ dzeta ξ, Ξ ksi χ, Χ hi η, Η eta ο, Ο omikron ψ, Ψ psi θ, Θ theta π, Π pi ω, Ω omega
10.2. WYBRANE STAŁE FIZYCZNE
Wielkość Symbol Wartość Prędkość światła w próŜni c 2.9979·108 m·s-1 Przyspieszenie ziemskie g 9,81 m.s-2 Przenikalność magnetyczna próŜni µ0 4π·10-7 H·m-1 Przenikalność elektryczna próŜni ε0 8.8542·10-12 F·m-1 Stała Plancka h 6.6262·10-34 J·s Elektryczny ładunek elementarny e 1.60219·10-19 C Masa spoczynkowa elektronu me 9.1095·10-31 kg Masa spoczynkowa protonu mp 1.6726485·10-27 kg Masa spoczynkowa neutronu mn 1.6749·10-27 kg Stała Rydberga R 1.0974·107 m-1 Liczba Avogadro NA 6.0220·1023 mol-1 Jednostka masy atomowej u 1.6606·10-27 kg Stała Boltzmanna k 1.3807·10-23 J·K-1 Stała Stefana-Boltzmanna σ 5.67031·10-8 W·m-2·K-4 Stała gazowa R0 8.3144 J·mol-1·K-1 Stała grawitacyjna G 6.6720·10-11 N·m2·kg-2
10.3. LITERATURA Literatura zalecana:
1. Bober T., Zalewski J. (2003) Biomechanika układu ruchu człowieka, AWF Wrocław 2. Miękisz S., Hendrich A. (red.) (1998) Wybrane zagadnienia z biofizyki 3. Resnick R., Halliday D. (1994) Fizyka. PWN, Warszawa
Literatura uzupełniająca:
4. Pilawski A. (red.) (1983) Podstawy biofizyki. PZWL, Warszawa 5. Kane J.W. i Sternheim M.M. (1988) Fizyka dla przyrodników. PWN, Warszawa 6. Glaser R. (1975) Wstęp do biofizyki. PZWL, Warszawa 7. Przestalski S. (1993) Fizyka z elementami biofizyki i agrofizyki. AWR, Wrocław 8. Ernst K. (1992) Fizyka sportu. PWN, Warszawa 9. Jaroszyk F. (1993) Biofizyka medyczna. Skrypt AM w Poznaniu.