



Języki
Strony
Prawny


Automatyka i sterowanie wgazownictwie
wykład 1
Autor: dr inż. Iwona OprzędkiewiczNazwa wydziału: WIMiRNazwa katedry: Katedra Automatyzacji Procesów

Pojęcia podstawowe
Procesu1
ur
y1
z1 zM
yn
Procesu1y1Zadajnik
uryp

Pojęcia podstawowe
• Wielkości fizyczne występujące w procesie sterownia, będącą funkcjączasu i wykorzystywane do przekazywania informacji nazywamysygnałami.
• Sygnałami wyjściowymi nazywamy sygnały, których przebieg określaprzebieg procesu.
• Sygnałami wejściowymi nazywamy sygnały, których przebieg wpływa naprzebieg procesu.
• Sygnałami sterującymi ( sterowaniami ) nazywamy sygnały wejściowe,które możemy zmieniać w sposób ustalony. Sterowania są oznaczaneprzez u.
• Sygnałami zakłócającymi ( zakłóceniami ) nazywamy sygnały wejściowe,na które nie mamy wpływu. Zakłócenia są oznaczane przez z.
ws yp
E
Procesw1 y1
S

Schemat układu regulacji
- węzeł sumacyjny• Błędem ( uchybem ) regulacji nazywamy różnicę
pomiędzy sygnałem zadanym i sygnałem wyjściowym zprocesu:
i = wi - yi• Układem zamkniętym ( układem ze sprzężeniem
zwrotnym ) nazywamy układ, w którym sygnaływyjściowe z procesu mogą oddziaływać na jego wejście.
• Urządzenie przetwarzające sygnał błędu na sygnałsterujący nazywamy regulatorem.
• Związki matematyczne pomiędzy sterowaniami iwyjściami nazywamy modelami matematycznymiprocesu.
Proces1=u1
r=ur
y1
z1 zM
yk
wk
w1
i
wi+ -
yi
_
_
+
+

Układ regulacji

Układ regulacji

Podział obiektów (członów) automatyki ze względuna rodzaj energii zasilającej
• elektryczne np. silniki, czujniki, sterowniki,przekaźniki itp..
Zalety:- duży wybór elementów;- dostępność energii elektrycznej;- łatwość przesyłania sygnałów elektrycznych na duże
odległości.Wady:- ciężkie i bezwładne człony wykonawcze;- często skomplikowana budowa.

NAPĘD ELEKTRYCZNY RUCHU LINIOWEGO POZYCJONOWANYPRZEŁĄCZALNIE

Podział obiektów (członów) automatyki ze względuna rodzaj energii zasilającej
• pneumatyczneZalety:- zasilanie sprzężonym powietrzem (bezpieczeństwo).Wady:- ograniczona odległość przesyłania sygnałów (200-300m);- wolne działanie;- duże rozmiary;- mała niezawodność.

Elementy pneumatycznych urządzeń automatyki
• W pneumatycznych urządzeniach automatykimiarą wartości sygnału jest ciśnienie. Ciśnieniadziałające na powierzchnie membran lub mieszkówwytwarzają siły, które – zależnie od konstrukcjiurządzeń współpracujących – powodują większelub mniejsze przesunięcia.

Elementy pneumatycznych urządzeń automatyki
• Membrany – wykonywane z gumy, tkaninpowlekanych gumą lub tworzywem sztucznym.Część środkowa usztywniona jest krążkiem(najczęściej metalowym) zwanym sztywnikiem.Parametrem charakteryzującym membrany jestpowierzchnia czynna membrany.
• Mieszki – wykonane są z mosiądzu, stali orazbrązu berylowego. Podstawowymi parametramicharakteryzującymi mieszki są: powierzchniaczynna mieszka i sztywność. Powierzchnia czynnaw przybliżeniu równa jest powierzchni denka, niezależy od zmiany długości mieszka. Sztywnośćmieszka c=F/∆l (∆l – zmiana długości mieszka);często określana doświadczalnie.

Elementy pneumatycznych urządzeń automatyki

Elementy pneumatycznych urządzeń automatyki
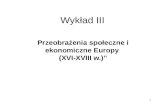
• Pneumatyczne elementy oporowe (oporypneumatyczne) – elementy wprowadzająceograniczenia przepływu powietrza i wywołujące wzwiązku z tym spadki napięcia.
• Opór pneumatyczny Rp oblicza się jakowspółczynnik proporcjonalności między spadkiemciśnienia ∆p i strumieniem przepływu masowegoQm
Rp=∆p/Qm
• Jeżeli wartość oporu nie zależy od strumienia toopór nazywamy liniowym lub laminarnym.

42 Aparatura Automatyzacji 14
Opory pneumatyczne
a/ -opór stały,b/ -nastawny,c/, d/, e/ - zmienne.
Pojemności pneumatyczne
p C

Elementy pneumatycznych urządzeń automatyki
• Pojemność pneumatyczna – współczynnikproporcjonalności pomiędzy strumieniemprzepływu masowego Qm a prędkością zmianciśnienia w komorze (zbiorniku) Cpdp/dt= QmW procesie sprężania powietrza w komorzepojemność pneumatyczna jest proporcjonalna doobjętości komory.

Aparatura Automatyzacji 16
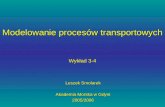
Element dysza – przesłona
konstrukcja:
rozkład ciśnienia:

Elementy pneumatycznych urządzeń automatyki
• Oznaczenia:• 1 - Stały opór pneumatyczny,• 2 – komora wyjściowa,• 3 – dysza,• 4 - ruchoma przesłona.• pz – ciśnienie zasilające,• pk - ciśnienie wyjściowe,• x – szerokość szczeliny.• d1 – średnica otworu opornika stałego 1,• d2 – średnica dyszy 3.

Przybliżona zależność pomiędzyciśnieniem wyjściowym i przesunięciemprzesłony:
2
2
21
241 x
d
d
pp z
k
Przy czym maksymalne otwarcie przesłony jest określonenastępująco:
22
max
dx

Ciśnienie wyjściowe pk jako funkcja szerokościszczeliny x:
x

42 Aparatura Automatyzacji 20
Sumator pneumatyczny
1,2 – mieszki,3 – dźwignia,4 – zderzak,5 – dysza.

Działanie układu sumatora:
•Wejście to ciśnienia p1 i p2 , a wyjście to przesunięciegórnej dźwigni, sterujące układem dysza – przesłona,
•Wagi ciśnień wejściowych są powiązane zpowierzchniami czołowymi mieszków oraz ichlokalizacją.
równanie bilansu sił i momentów:
2422213111 lFlSplFlSp
oznaczenia – zob. rysunek

SIŁOWNIK PNEUMATYCZNY TŁOKOWY

ELEMENTY NAPĘDU PNEUMATYCZNEGO

Podział obiektów (członów) automatyki ze względuna rodzaj energii zasilającej
• hydrauliczneZalety:- korzystne własności oleju (smarowanie i ochrona);- małe wymiary członów wykonawczych;- duże moce;- duża niezawodność.Wady:- znacznie ograniczona odległość przesyłania (do kilku m);- ciężkie przewody sygnałowe;- konieczność uszczelniania instalacji;- zagrożenie wybuchem i pożarem.

1 – tłok, 2 – tłoczysko, 3 – doprowadzenie oleju, 4 – cylinder, 5 - uszczelnienie
SIŁOWNIK HYDRAULICZNY TŁOKOWY PROSTY

Producenci systemów sterowania dlagazownictwa w Polsce
+Emerson Process Management - Delta V, Oviation+ Siemens - PCS7+ ABB - MasterPiece+ Allan Bradley - Control Logic+ GeFanuc + Wonderware - RX3 + Intouch

Przykłady elementów systemów
sterowania

Struktura systemu sterowaniaStacja redukcyjno-pomiarowa

Stacja redukcyjno-pomiarowa
realizacja

Tłocznia gazu
Struktura systemu sterowania

Tłocznia gazu
Realizacja

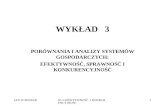
Układ regulacji
R Obiekt
z(t)
w(t) e(t) u(t) y(t)
gdzie:•w(t) – wartość zadana,•e(t) – uchyb regulacji,•u(t) – sterowanie,•z(t) –zakłócenie,•y(t)–wielkośćregulowanaR– regulatorObiekt– obiekt regulacji
Funkcje regulatora:1. wyznaczenie takiego sygnału
sterującego, aby uchyb regulacji byłmożliwie jak najmniejszy,
2. Zapewnienie stabilności układuregulacji,
3. Zapewnienie odpowiedniej jakościregulacji, której miarą są wskaźnikijakości regulacji.
+
-+
-

Układy - klasyfikacja
Podział ze względu na sposób działania układu– Układy stabilizacji - w procesie regulacji mają za zadanie utrzymać stałą
(w czasie) wartość wielkości wyjściowej mimo zmian wielkości wejściowej idziałających na układ zakłóceń.

Układy - klasyfikacja
Podział ze względu na sposób działania układu– Układy śledzące (nadążne) - działają w taki sposób, aby sygnał wielkości
wyjściowej nadążał za zmianami wielkości wejściowej, tzn., aby y(t) = w(t).Zmiany sygnałów wejściowych nie są znane ani przewidywalne: są losowąfunkcją czasu. Układy te są również nazywane serwomechanizmami.

Układy – klasyfikacja- układy nadążnecd.
• Sterowanie w układzie otwartym (algorytmzegarowy).
• Sterowanie w układzie otwartym - zmiana ustawienia fotoogniw następujew zadanych odstępach czasowych na podstawie wyliczonej pozycji Słońcana nieboskłonie. Od tego typu układów wymaga się precyzyjnegoustawienia całej konstrukcji (znalezienie prawidłowego kierunkupołudnia), oraz sprzężenie zwrotne od położenia fotoogniw. Aktualnapozycja słoneczna wyliczana jest na podstawie wzorów empirycznych (kątazymutu i elewacji). Różnica pomiędzy aktualną pozycją słońca a pozycjąstacji jest odchyłką od prawidłowego położenia, którą układ regulacji masprowadzić do zera - stąd mowa o sprzężeniu zwrotnym. Nie jest tojednak sprzężenie zwrotne od wielkości wyjściowej, jaką jest mocuzyskiwana z baterii - jest to zatem nadal układ otwarty. Wadą tego typuukładów są stosunkowo wysokie koszty energetyczne sterowania i małaefektywność, zwłaszcza w miesiącach zimowych. Układy te nie potrafiąreagować na zmieniające się warunki atmosferyczne. Rozróżnia się układyotwarte pracujące w układzie związanym z jedną osią i dwoma osiami.

Układy – klasyfikacja- układy nadążnecd.
• Sterowanie w układzie zamkniętym.• W układzie zamkniętym oprócz informacji o położeniu fotoogniw,
pobiera się informacje o oświetleniu. W zależności od typu użytegoczujnika mogą to być tylko dane o poziomie promieniowania lubteż o jego charakterze (kierunkowość, stosunek promieniowaniabezpośredniego do całkowitego itp.). Pozwala to w najprostszymprzypadku, ustawić dolny próg oświetlenia, przy którymaktywują się układy napędowe. Daje to dużą oszczędność energiiw dniach o słabym nasłonecznieniu. W bardziej zaawansowanychaplikacjach umożliwia stosowanie inteligentnych algorytmówdecyzyjnych (np. optymalne ustawienie przy przeważającymudziale promieniowania rozproszonego). W tym układzie możnawyliczyć kat odchylenia baterii od optimum. Wartością zadaną jestzerowa odchyłka od położenia dającego największy uzyskenergetyczny.

Układy – klasyfikacja- układy nadążnecd.
• Układ hybrydowy.• Układ hybrydowy jest połączeniem zalet układu zamkniętego i
otwartego przy eliminacji ich wad. Umożliwia zabezpieczenie sięprzed błędnymi odczytami z czujnika oświetlenia (awaria bądźdodatkowe boczne oświetlenie z odbicia).
• Ze względu na to że, czynnikiem wpływającym na maksymalnyuzysk energii ze stacji jest ilość promieniowania odbitego orazrozproszonego, połączenie w układzie nadążnym stacji tych dwóchmetod sterowania, pozwala maksymalnie zminimalizować uchybregulacji, dla dłuższego okresu sterowania. Wynikiem jestpowstanie układu mieszanego umożliwiającego podejmowaniedecyzji o rodzaju sterowania:

Układy - klasyfikacja
Podział ze względu na sposób działania układu– Układy programowalne - są odmianą układów śledzących z tą różnicą, że
sygnał wejściowy w(t) jest z góry określoną (znaną) funkcją czasu.

Układy - klasyfikacja
Podział ze względu na sposób działania układu– Układy optymalne - struktura i parametry regulatora określone są na
podstawie obliczonego ekstremum przyjętego wskaźnika jakości.Przykładem takiego układu może być układ sterowania ciągiem silnikówtak, aby samolot osiągnął określony pułap, przy minimalizacji wskaźnikajakości, którym jest zużycie paliwa.
– Układy przełączające - regulacja odbywa się na zasadzacie załączaniai/lub wyłączania odpowiednich urządzeń procesu w odpowiedniej kolejności(sekwencji), a rolę regulatora pełni najczęściej układ logiczny (na rys. PID).

Układy - klasyfikacja
Podział ze względu na liniowość układu– Układy liniowe - można je opisać za pomocą równań
liniowych algebraicznych, różniczkowych, różnicowychlub całkowych. Układy liniowe spełniają zasadęsuperpozycji.
– Układy nieliniowe - układ zawierający przynajmniejjeden element nieliniowy jest układem nieliniowym. Wpraktyce każdy układ jest nieliniowy, lecz w przybliżeniuzakłada się jego liniowość lub linearyzuje się jegonieliniową charakterystykę. Robi się to zwłaszcza wtedy,gdy działanie procesu ogranicza się do niewielkiegoobszaru wokół pewnego punktu pracy.

Układy - klasyfikacja
Podział ze względu na charakter sygnałów– Układy ciągłe - wszystkie sygnały (wejściowe i
wyjściowe) są funkcjami ciągłymiw czasie i mogą przybierać dowolną wartość z obszaruswojej zmienności. Układyte opisuje się zwykle równaniami różniczkowymi. Np:
22
2
121
1
dt
dC
dt
dC

Układy - klasyfikacja
Podział ze względu na charakter sygnałów– Układy dyskretne - układ jest dyskretny, jeżeli
przynajmniej jeden jego sygnałma charakter dyskretny tzn. przyjmuje tylko określonewartości dla określonych argumentów. Układy takieopisuje się zwykle równaniami różnicowymi.

Układy - klasyfikacja
Podział ze względu na charakter układu– Układy statyczne (bezinercyjne) - wyjście w danej
chwili zależy tylko od wejścia (brak stanunieustalonego). Układy te składają się tylko zelementów rozpraszających energię i opisuje się jerównaniami algebraicznymi.
x(t) y(t)
a b
tbxtay

Układy - klasyfikacja
Podział ze względu na charakter układu– Układy dynamiczne - układy, w których wyjście nie jest
jednoznaczną funkcją wejścia i zależy dodatkowo odcharakteru procesu przejściowego (inercyjności) i stanuukładu w chwili początkowej. Opisuje się je równaniamiróżniczkowymi lub różnicowymi.
u(t) y(t)i(t)
C
R
tydt
dyRCtu
dt
tdyCtiitytRitu
)(

Układy - klasyfikacja
Podział ze względu na liczbę wejść i wyjść
– Układy jednowymiarowe - układy o jednym wejściui jednym wyjściu.

Układy - klasyfikacja
Podział ze względu na liczbę wejść i wyjść
– Układy wielowymiarowe - układy o wielu wejściachi/lub wielu wyjściach.
Proces1=u1
r=ur
y1
z1 zM
yk
wk
w1
_
_
+
+

Układy - klasyfikacja
Podział ze względu na charakter zmiennościwymuszeń i parametrów
– Układy deterministyczne - układy, w którychsygnały są zdeterminowanymi funkcjami czasu.
– Układy stochastyczne - układy, w których sygnałysą wielkościami przypadkowymi (losowymi).

Układy - klasyfikacja
Podział ze względu na zdolność dosamoczynnego nastrajania
– Układy adaptacyjne - układy, ze zdolnością dosamoczynnego nastrajania parametrów (np.układu pomiarowego lub regulatora) dozmieniających się parametrów obiektu lubwystępujących zakłóceń.
– Układy zwykłe (nieadaptacyjne) - układy nieposiadające powyższej własności.