ZASTOSOWANIE PROGRAMU SOLIDWORKS DO … · Wirtualne środowisko pracy heksapoda 4.1. ANALIZA RUCHU...
9
MODELOWANIE INŻYNIERSKIE 2017 nr 63, ISSN 1896-771X 32 ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH SYMULACJI WIRTUALNYCH PROTOTYPÓW Dawid Cekus 1a , Ilona Kubik 1b , Łukasz Piotrowski 1c , Dorian Skrobek 1d . 1 Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Politechnika Częstochowska a [email protected], b [email protected], c [email protected], d [email protected] Streszczenie Wirtualne prototypowanie stanowi obecnie niezbędny etap projektowania maszyn i urządzeń. Pozwala ono na zwiększenie efektywności działania maszyn, a także umożliwia wprowadzenie zmian konstrukcyjnych, w zależności od uzyskanych wyników symulacyjnych. Z zastosowaniem wirtualnego prototypowania projektowanie konstrukcji staje się szybsze i bardziej ekonomiczne. W artykule przedstawiono wieloetapowy proces opracowywania wirtual- nego prototypu, a także zaprezentowano wyniki wybranych badań symulacyjnych uzyskanych na podstawie opra- cowanych w programie SolidWorks modeli symulacyjnych i obliczeniowych. Przedstawione przykładowe wyniki analiz dotyczą modelu robota kroczącego (heksapoda). Słowa kluczowe: robot kroczący, wirtualne prototypowanie, SolidWorks THE APPLICATION OF SOLIDWORKS TO CONDUCT ADVANCED SIMULATIONS OF VIRTUAL PROTOTYPES Summary Currently virtual prototyping is necessary during the design of new mechanisms and devices. The virtual modeling allows to increase the efficiency of machine operation. Also it enables to reconstruct the model depending on the simulation results. Virtual prototyping causes the faster and cheaper designing. The article presents multistep process of creation of virtual prototype and selected results of simulation executed in SolidWorks environment. The presented sample simulation results of analyses concern the model of the walking robot (hexapod). Keywords: walking robot, virtual prototyping, SolidWorks 1. WSTĘP Wirtualne prototypowanie (Virtual Prototyping - VP) jest interpretowane na wiele różnych sposobów. Autor pracy [11] porównał kilka definicji dotyczących wirtual- nego prototypowania oraz wyjaśnił różnice pomiędzy VP a wirtualną rzeczywistością (Virtual Reality - VR), wirtualnym środowiskiem (Virtual Environment - VE) i wirtualną technologią produkcji (Virtual Manufactu- ring - VM). Ponadto zaproponował własne sformułowa- nie odnoszące się do wirtualnego prototypowania, brzmiące: „Wirtualny prototyp lub cyfrowa makieta (digital mock-up) to komputerowa symulacja fizycznego produktu, który może być prezentowany, analizowany i testowany z uwzględnieniem aspektów związanych z cyklem życia produktu (takich jak projektowanie, produkcja, obsługa i recykling) jak prawdziwy model fizyczny. Budowa i testowanie wirtualnego prototypu nazywa się wirtualnym prototypowaniem”. Wirtualne prototypowanie w porównaniu do tradycyjne- go procesu projektowania ([6, 7]) pozwala na łatwiejsze, szybsze i tańsze projektowanie maszyn i urządzeń, przystosowanych do działania w określonych warun- kach (rys. 1). Ponadto wirtualne prototypowanie mini- malizuje ryzyko występowania zagrożeń, które mogą pojawiać się podczas testowania prototypów niepodda-
Transcript of ZASTOSOWANIE PROGRAMU SOLIDWORKS DO … · Wirtualne środowisko pracy heksapoda 4.1. ANALIZA RUCHU...
MODELOWANIE INŻYNIERSKIE 2017 nr 63, ISSN 1896-771X
32
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH SYMULACJI WIRTUALNYCH PROTOTYPÓW
Dawid Cekus1a, Ilona Kubik1b, Łukasz Piotrowski1c, Dorian Skrobek1d.
1Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Politechnika Częstochowska [email protected], [email protected], [email protected], [email protected]
Streszczenie Wirtualne prototypowanie stanowi obecnie niezbędny etap projektowania maszyn i urządzeń. Pozwala ono na zwiększenie efektywności działania maszyn, a także umożliwia wprowadzenie zmian konstrukcyjnych, w zależności od uzyskanych wyników symulacyjnych. Z zastosowaniem wirtualnego prototypowania projektowanie konstrukcji staje się szybsze i bardziej ekonomiczne. W artykule przedstawiono wieloetapowy proces opracowywania wirtual-nego prototypu, a także zaprezentowano wyniki wybranych badań symulacyjnych uzyskanych na podstawie opra-cowanych w programie SolidWorks modeli symulacyjnych i obliczeniowych. Przedstawione przykładowe wyniki analiz dotyczą modelu robota kroczącego (heksapoda).
Słowa kluczowe: robot kroczący, wirtualne prototypowanie, SolidWorks
THE APPLICATION OF SOLIDWORKS TO CONDUCT ADVANCED SIMULATIONS OF VIRTUAL PROTOTYPES
Summary Currently virtual prototyping is necessary during the design of new mechanisms and devices. The virtual modeling allows to increase the efficiency of machine operation. Also it enables to reconstruct the model depending on the simulation results. Virtual prototyping causes the faster and cheaper designing. The article presents multistep process of creation of virtual prototype and selected results of simulation executed in SolidWorks environment. The presented sample simulation results of analyses concern the model of the walking robot (hexapod).
Keywords: walking robot, virtual prototyping, SolidWorks
1. WSTĘP
Wirtualne prototypowanie (Virtual Prototyping - VP) jest interpretowane na wiele różnych sposobów. Autor pracy [11] porównał kilka definicji dotyczących wirtual-nego prototypowania oraz wyjaśnił różnice pomiędzy VP a wirtualną rzeczywistością (Virtual Reality - VR), wirtualnym środowiskiem (Virtual Environment - VE) i wirtualną technologią produkcji (Virtual Manufactu-ring - VM). Ponadto zaproponował własne sformułowa-nie odnoszące się do wirtualnego prototypowania, brzmiące: „Wirtualny prototyp lub cyfrowa makieta
(digital mock-up) to komputerowa symulacja fizycznego
produktu, który może być prezentowany, analizowany
i testowany z uwzględnieniem aspektów związanych
z cyklem życia produktu (takich jak projektowanie,
produkcja, obsługa i recykling) jak prawdziwy model
fizyczny. Budowa i testowanie wirtualnego prototypu
nazywa się wirtualnym prototypowaniem”.
Wirtualne prototypowanie w porównaniu do tradycyjne-go procesu projektowania ([6, 7]) pozwala na łatwiejsze, szybsze i tańsze projektowanie maszyn i urządzeń, przystosowanych do działania w określonych warun-kach (rys. 1). Ponadto wirtualne prototypowanie mini-malizuje ryzyko występowania zagrożeń, które mogą pojawiać się podczas testowania prototypów niepodda-
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
nych wcześniejszym badaniom symulacyjnym. scenariusze pracy maszyn i urządzeń mogą być przeprwadzane zarówno w normalnym trybie pracy, jak rónież w ekstremalnych i nietypowych warunkach [Cechy te sprawiają, że wirtualne prototypowanie jest obecnie niezbędnym aspektem funkcjonowania wszyskich gałęzi przemysłu.
Rys. 1. Porównanie tradycyjnego procesu rozwoju oraz wirtuanego prototypowania (na podstawie [7])
Do przeprowadzenia procesu wirtualnego prototypownia stosowany jest szereg programów CADDo najczęściej wykorzystywanego należą Autodesk Inventor, Catia, NX Rodzaj programu zależy przede wszystkim od wielkości i możliwości finansowych przedsiębiorstw.
W niniejszej pracy opracowano w programie SlidWorks [4, 13] w pełni funkcjonalny model wirtualny sześcionożnego robota kroczącego (heksapodaryzując poszczególne etapy wirtualnego prototypownia (rys. 2), od budowy modeli i wirtualnego środowiska pracy, przez badania, kończąc na optymalizacjstrukcji.
Rys. 2. Etapy wirtualnego prototypowania
2. MODEL GEOMETRYCZNY
W przypadku kroczących robotów mobilnych można wyróżnić grupy posiadające: zero (roboty wężopodobne), jedną (monopody), dwie (bipedy), cztery (quadropedy), sześć (heksapody) lub więcej odnóży [Większa liczba odnóży zapewnia lepszą równowagę, a co za tym idzie, stabilność statyczną i dynamiczną. Mnie
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
33
nych wcześniejszym badaniom symulacyjnym. Wirtualne urządzeń mogą być przepro-
normalnym trybie pracy, jak rów-malnych i nietypowych warunkach [2, 7].
wirtualne prototypowanie jest obecnie niezbędnym aspektem funkcjonowania wszyst-
. Porównanie tradycyjnego procesu rozwoju oraz wirtual-
Do przeprowadzenia procesu wirtualnego prototypowa-CAD/CAE/CAM.
oprogramowania NX czy SolidWorks.
Rodzaj programu zależy przede wszystkim od wielkości możliwości finansowych przedsiębiorstw.
cowano w programie So-] w pełni funkcjonalny model wirtualny robota kroczącego (heksapoda), charakte-
tapy wirtualnego prototypowa-i wirtualnego środowiska
optymalizacji kon-
GEOMETRYCZNY
robotów mobilnych można wyróżnić grupy posiadające: zero (roboty wężopodobne), jedną (monopody), dwie (bipedy), cztery (quadropedy),
odnóży [3, 7, 10, 12]. odnóży zapewnia lepszą równowagę, a co
stabilność statyczną i dynamiczną. Mniej-
sza liczba nóg nie wymaga z kolei sterowania chodem, jednak zapewnia mniejszą stabilność ruchu.
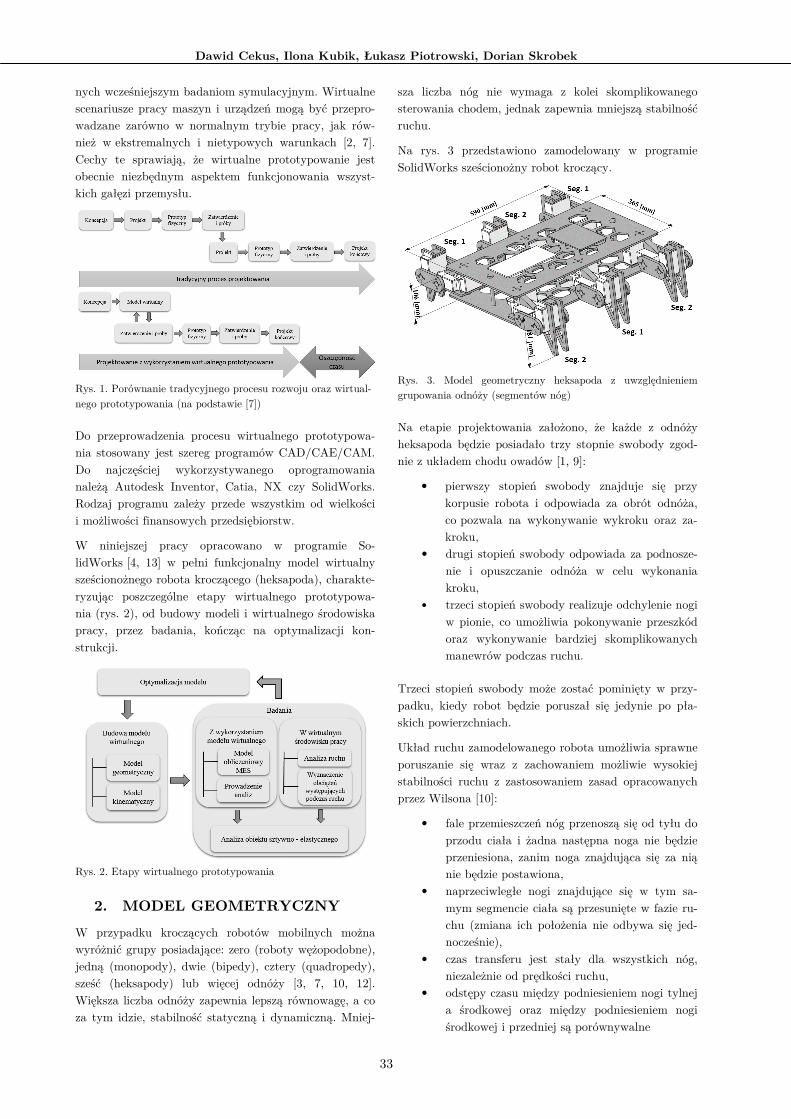
Na rys. 3 przedstawiono zamodelowany SolidWorks sześcionożny robot kroczący
Rys. 3. Model geometryczny heksapodagrupowania odnóży (segmentów nóg)
Na etapie projektowania założono, że każde z odnóży heksapoda będzie posiadało trzy stopnie swobody zgonie z układem chodu owadów [1,
• pierwszy stopień swobody znajduje się przy korpusie robota i odpowiada za obrót odnóża, co pozwala na wykonywanie wykrokukroku,
• drugi stopień swobody odpowiada za nie i opuszczanie odnóża w celu wykonania kroku,
• trzeci stopień swobody realizuje odchylenie nogi w pionie, co umożliwia pokonywanie przeszkód oraz wykonywanie bardziej skomplikowanych manewrów podczas ruchu
Trzeci stopień swobody może zostać pomipadku, kiedy robot będzie poruszał się jedynie po płskich powierzchniach.
Układ ruchu zamodelowanego robota poruszanie się wraz z zachowaniem możliwie wysokiej stabilności ruchu z zastosowaniemprzez Wilsona [10]:
• fale przemieszczeń nóg przenoszą się od tyłu do przodu ciała i żadna następna noga nie przeniesiona, zanim noga znajdująca sięnie będzie postawiona,
• naprzeciwległe nogi znajdujące się w tym smym segmencie ciała są przeschu (zmiana ich położennocześnie),
• czas transferu jest stały dla wszystkich nóg,niezależnie od prędkości ruchu,
• odstępy czasu między podniesieniem nogi tylnej a środkowej oraz między podniesieniem nogi środkowej i przedniej są porównywalne
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
wymaga z kolei skomplikowanego sterowania chodem, jednak zapewnia mniejszą stabilność
zamodelowany w programie robot kroczący.
. Model geometryczny heksapoda z uwzględnieniem
Na etapie projektowania założono, że każde z odnóży będzie posiadało trzy stopnie swobody zgod-
1, 9]:
pierwszy stopień swobody znajduje się przy korpusie robota i odpowiada za obrót odnóża,
pozwala na wykonywanie wykroku oraz za-
drugi stopień swobody odpowiada za podnosze-odnóża w celu wykonania
trzeci stopień swobody realizuje odchylenie nogi w pionie, co umożliwia pokonywanie przeszkód oraz wykonywanie bardziej skomplikowanych manewrów podczas ruchu.
Trzeci stopień swobody może zostać pominięty w przy-padku, kiedy robot będzie poruszał się jedynie po pła-
Układ ruchu zamodelowanego robota umożliwia sprawne poruszanie się wraz z zachowaniem możliwie wysokiej
z zastosowaniem zasad opracowanych
fale przemieszczeń nóg przenoszą się od tyłu do przodu ciała i żadna następna noga nie będzie
zanim noga znajdująca się za nią
naprzeciwległe nogi znajdujące się w tym sa-mym segmencie ciała są przesunięte w fazie ru-chu (zmiana ich położenia nie odbywa się jed-
czas transferu jest stały dla wszystkich nóg, niezależnie od prędkości ruchu, odstępy czasu między podniesieniem nogi tylnej a środkowej oraz między podniesieniem nogi
edniej są porównywalne
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
oraz Delcomyn [10]: • noga przednia (lub środkowa) jest podnoszona
tylko wtedy, gdy noga poprzedzająca ją w skwencji zostanie postawiona na podłoże.
3. BADANIA MODELU WIRTUALNEGO
Podstawowym etapem prac projektowych jest zbadanie zjawisk występujących wewnątrz elementów konstrukcji i ich wpływu na pracę konstruowanegoStosując moduł Simulation programu SolidWorks, bazujący na metodzie elementów skończonychprzeprowadzić np. analizę statyczną, częstotliwościową, wyboczeniową, zmęczeniową, czy termiczną.wszystkich zaletach metody elementów skończonych, należy pamiętać, że otrzymane rozwiązania są zawsze obarczone pewnymi błędami, wynikającymi między innymi z uproszczeń siatki elementów skończonych.
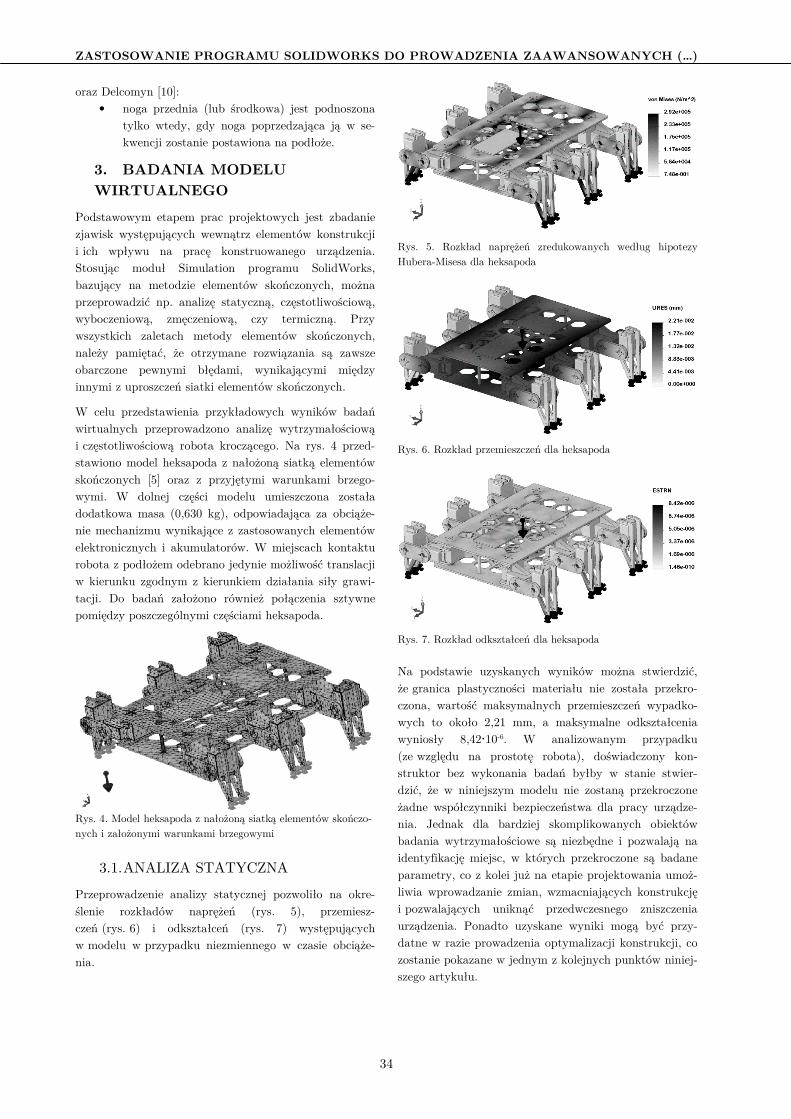
W celu przedstawienia przykładowych wyników badań wirtualnych przeprowadzono analizę wytrzymałościową i częstotliwościową robota kroczącego. Na rysstawiono model heksapoda z nałożoną siatką elementów skończonych [5] oraz z przyjętymi warunkami brzegwymi. W dolnej części modelu umieszczona została dodatkowa masa (0,630 kg), odpowiadająca zanie mechanizmu wynikające z zastosowanychelektronicznych i akumulatorów. W miejscach kontaktu robota z podłożem odebrano jedynie możliwość w kierunku zgodnym z kierunkiem działania siły grawtacji. Do badań założono również połączenia sztywnepomiędzy poszczególnymi częściami heksapoda
Rys. 4. Model heksapoda z nałożoną siatką elementów skończnych i założonymi warunkami brzegowymi
3.1. ANALIZA STATYCZNA
Przeprowadzenie analizy statycznej pozwoliło na okrślenie rozkładów naprężeń (rys. 5), czeń (rys. 6) i odkształceń (rys. 7) w modelu w przypadku niezmiennego w czasienia.
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
34
noga przednia (lub środkowa) jest podnoszona tylko wtedy, gdy noga poprzedzająca ją w se-
zostanie postawiona na podłoże.
MODELU
prac projektowych jest zbadanie wewnątrz elementów konstrukcji
uowanego urządzenia. moduł Simulation programu SolidWorks, na metodzie elementów skończonych, można
przeprowadzić np. analizę statyczną, częstotliwościową, iową, zmęczeniową, czy termiczną. Przy
metody elementów skończonych, należy pamiętać, że otrzymane rozwiązania są zawsze obarczone pewnymi błędami, wynikającymi między innymi z uproszczeń siatki elementów skończonych.
przykładowych wyników badań przeprowadzono analizę wytrzymałościową
Na rys. 4 przed-stawiono model heksapoda z nałożoną siatką elementów
] oraz z przyjętymi warunkami brzego-W dolnej części modelu umieszczona została
, odpowiadająca za obciąże-zastosowanych elementów
W miejscach kontaktu możliwość translacji
zgodnym z kierunkiem działania siły grawi-cji. Do badań założono również połączenia sztywne
pomiędzy poszczególnymi częściami heksapoda.
heksapoda z nałożoną siatką elementów skończo-
ANALIZA STATYCZNA
Przeprowadzenie analizy statycznej pozwoliło na okre-ślenie rozkładów naprężeń (rys. 5), przemiesz-
(rys. 7) występujących w czasie obciąże-
Rys. 5. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa dla heksapoda
Rys. 6. Rozkład przemieszczeń dla heksapoda
Rys. 7. Rozkład odkształceń dla heksapoda
Na podstawie uzyskanych wyników że granica plastyczności materiału nie czona, wartość maksymalnych przemieszczeń wypadkwych to około 2,21 mm, a maksymalne wyniosły 8,42·10-6. W analizowanym przypadku(ze względu na prostotę robota)struktor bez wykonania badań dzić, że w niniejszym modelu nie zostaną przekroczone żadne współczynniki bezpieczeństwa dla pracy urządznia. Jednak dla bardziej skomplikowanych obiektów badania wytrzymałościowe są niezbędne iidentyfikację miejsc, w których przekroczparametry, co z kolei już na etapie projektowanialiwia wprowadzanie zmian, wzmacniającychi pozwalających uniknąć przedwczesnego zniszczenia urządzenia. Ponadto uzyskane wyniki mogą być przdatne w razie prowadzenia optymalizacji konstrukcji, cozostanie pokazane w jednym z kolejnych punktów ninieszego artykułu.
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH (…)
. Rozkład naprężeń zredukowanych według hipotezy
. Rozkład przemieszczeń dla heksapoda
. Rozkład odkształceń dla heksapoda
wyników można stwierdzić, granica plastyczności materiału nie została przekro-
czona, wartość maksymalnych przemieszczeń wypadko-a maksymalne odkształcenia
W analizowanym przypadku prostotę robota), doświadczony kon-
bez wykonania badań byłby w stanie stwier-iniejszym modelu nie zostaną przekroczone
bezpieczeństwa dla pracy urządze-Jednak dla bardziej skomplikowanych obiektów
są niezbędne i pozwalają na przekroczone są badane
kolei już na etapie projektowania umoż-wzmacniających konstrukcję
uniknąć przedwczesnego zniszczenia Ponadto uzyskane wyniki mogą być przy-
optymalizacji konstrukcji, co zostanie pokazane w jednym z kolejnych punktów niniej-
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
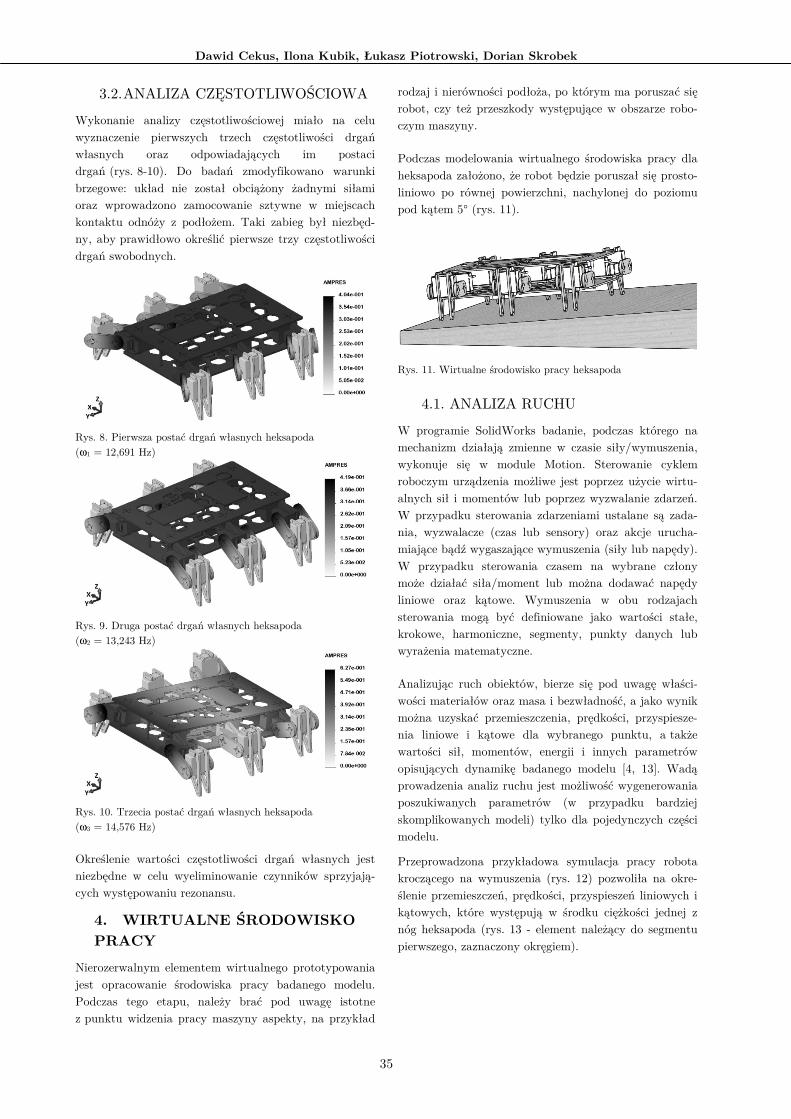
3.2. ANALIZA CZĘSTOTLIWOŚCIOW
Wykonanie analizy częstotliwościowej mwyznaczenie pierwszych trzech częstotliwości drgań własnych oraz odpowiadających im postaci drgań (rys. 8-10). Do badań zmodyfikowano warunki brzegowe: układ nie został obciążony żadnymi siłami oraz wprowadzono zamocowanie sztywne w miejscach kontaktu odnóży z podłożem. Taki zabieg był niezbęny, aby prawidłowo określić pierwsze trzy częstotliwości drgań swobodnych.
Rys. 8. Pierwsza postać drgań własnych heksapoda (ω1 = 12,691 Hz)
Rys. 9. Druga postać drgań własnych heksapoda (ω2 = 13,243 Hz)
Rys. 10. Trzecia postać drgań własnych heksapoda (ω3 = 14,576 Hz)
Określenie wartości częstotliwości drgań własnych jest niezbędne w celu wyeliminowanie czynników sprzyjajcych występowaniu rezonansu.
4. WIRTUALNE ŚRODOWISKO PRACY
Nierozerwalnym elementem wirtualnego prototypowania jest opracowanie środowiska pracy badanego modelu. Podczas tego etapu, należy brać pod uwagę istotne z punktu widzenia pracy maszyny aspekty,
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
35
CZĘSTOTLIWOŚCIOWA
analizy częstotliwościowej miało na celu częstotliwości drgań ch im postaci
zmodyfikowano warunki brzegowe: układ nie został obciążony żadnymi siłami
mocowanie sztywne w miejscach kontaktu odnóży z podłożem. Taki zabieg był niezbęd-
prawidłowo określić pierwsze trzy częstotliwości
. Pierwsza postać drgań własnych heksapoda
. Druga postać drgań własnych heksapoda
Trzecia postać drgań własnych heksapoda
Określenie wartości częstotliwości drgań własnych jest wyeliminowanie czynników sprzyjają-
WIRTUALNE ŚRODOWISKO
Nierozerwalnym elementem wirtualnego prototypowania jest opracowanie środowiska pracy badanego modelu.
należy brać pod uwagę istotne aspekty, na przykład
rodzaj i nierówności podłoża, po którym ma poruszarobot, czy też przeszkody występujące w obszarze robczym maszyny.
Podczas modelowania wirtualnego środowiska pracy dla heksapoda założono, że robot będzie poruszał się prostliniowo po równej powierzchni, nachylonej do poziomu pod kątem 5° (rys. 11).
Rys. 11. Wirtualne środowisko pracy heksapoda
4.1. ANALIZA RUCHU
W programie SolidWorks badanimechanizm działają zmienne w czasie siły/wymuszenia, wykonuje się w module Motionroboczym urządzenia możliwe jest poprzez alnych sił i momentów lub poprzez wyzwalanie zdarzeń. W przypadku sterowania zdarzeniami ustalane są zadnia, wyzwalacze (czas lub sensory) oraz akcje uruchmiające bądź wygaszające wymuszenia (siły lub napędy). W przypadku sterowania czasem na wybrane człony może działać siła/moment lub można liniowe oraz kątowe. Wymuszenia w obu rodzajach sterowania mogą być definiowane jako wartości stałe, krokowe, harmoniczne, segmenty, punkty danych lub wyrażenia matematyczne.
Analizując ruch obiektów, bierze się wości materiałów oraz masa i bezwładność, amożna uzyskać przemieszczenia, prędkości, przyspiesznia liniowe i kątowe dla wybranego punktu, awartości sił, momentów, energii i innych parametrów opisujących dynamikę badanego modelu [prowadzenia analiz ruchu jest możliwość wygenerowania poszukiwanych parametrów (w przypadku bardziej skomplikowanych modeli) tylko dla pojedynmodelu.
Przeprowadzona przykładowa symulacjkroczącego na wymuszenia (rys. ślenie przemieszczeń, prędkości, przyspieszekątowych, które występują w środku ciężkości nóg heksapoda (rys. 13 - element należący do segmentu pierwszego, zaznaczony okręgiem)
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
rodzaj i nierówności podłoża, po którym ma poruszać się występujące w obszarze robo-
Podczas modelowania wirtualnego środowiska pracy dla heksapoda założono, że robot będzie poruszał się prosto-liniowo po równej powierzchni, nachylonej do poziomu
. Wirtualne środowisko pracy heksapoda
RUCHU
W programie SolidWorks badanie, podczas którego na mechanizm działają zmienne w czasie siły/wymuszenia, wykonuje się w module Motion. Sterowanie cyklem roboczym urządzenia możliwe jest poprzez użycie wirtu-alnych sił i momentów lub poprzez wyzwalanie zdarzeń. W przypadku sterowania zdarzeniami ustalane są zada-nia, wyzwalacze (czas lub sensory) oraz akcje urucha-
ymuszenia (siły lub napędy). W przypadku sterowania czasem na wybrane człony
moment lub można dodawać napędy liniowe oraz kątowe. Wymuszenia w obu rodzajach sterowania mogą być definiowane jako wartości stałe,
ty, punkty danych lub
ierze się pod uwagę właści-wości materiałów oraz masa i bezwładność, a jako wynik można uzyskać przemieszczenia, prędkości, przyspiesze-nia liniowe i kątowe dla wybranego punktu, a także wartości sił, momentów, energii i innych parametrów
cych dynamikę badanego modelu [4, 13]. Wadą prowadzenia analiz ruchu jest możliwość wygenerowania
(w przypadku bardziej tylko dla pojedynczych części
symulacja pracy robota . 12) pozwoliła na okre-
, prędkości, przyspieszeń liniowych i środku ciężkości jednej z
element należący do segmentu ).
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
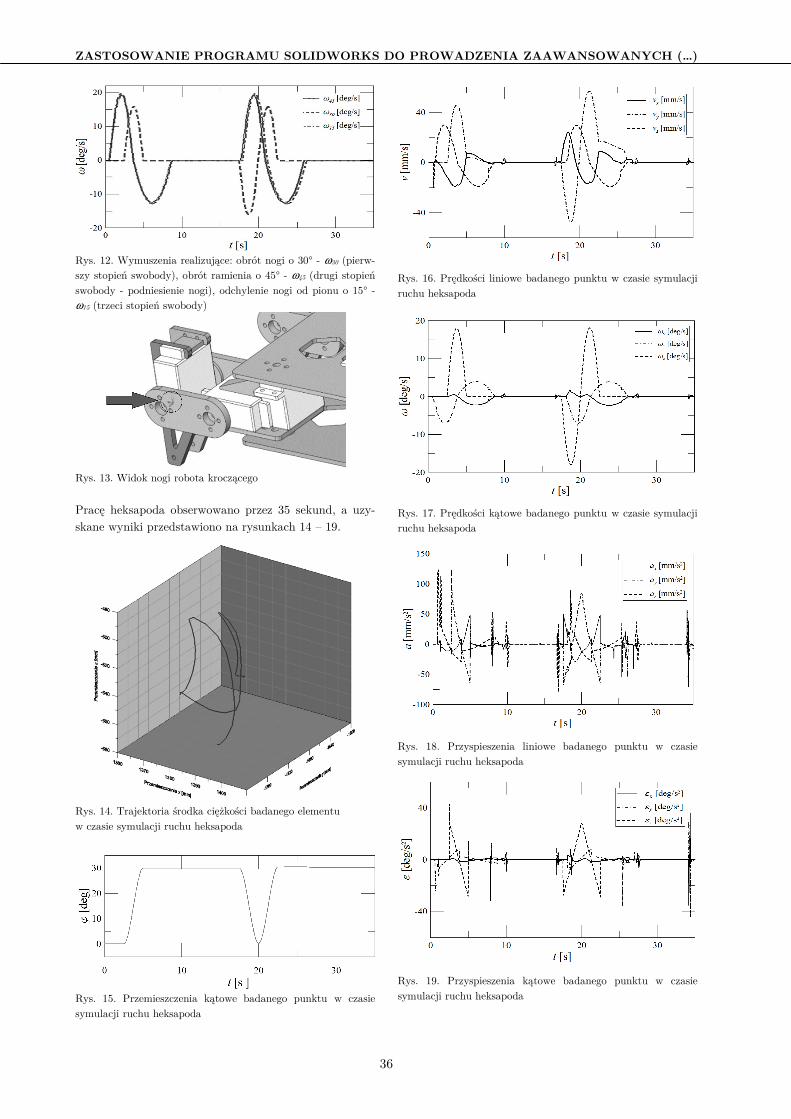
Rys. 12. Wymuszenia realizujące: obrót nogi o 30szy stopień swobody), obrót ramienia o 45° -swobody - podniesienie nogi), odchylenie nogi od pionu o 15ω15 (trzeci stopień swobody)
Rys. 13. Widok nogi robota kroczącego
Pracę heksapoda obserwowano przez 35 sekund, a uzskane wyniki przedstawiono na rysunkach 1
Rys. 14. Trajektoria środka ciężkości badanego w czasie symulacji ruchu heksapoda
Rys. 15. Przemieszczenia kątowe badanego punktusymulacji ruchu heksapoda
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
36
realizujące: obrót nogi o 30° - ω30 (pierw-
- ω45 (drugi stopień podniesienie nogi), odchylenie nogi od pionu o 15° -
obserwowano przez 35 sekund, a uzy-na rysunkach 14 – 19.
badanego elementu
Przemieszczenia kątowe badanego punktu w czasie
Rys. 16. Prędkości liniowe badanego punkturuchu heksapoda
Rys. 17. Prędkości kątowe badanego punkturuchu heksapoda
Rys. 18. Przyspieszenia liniowe badanego punktusymulacji ruchu heksapoda
Rys. 19. Przyspieszenia kątowe badanego punktusymulacji ruchu heksapoda
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH (…)
Prędkości liniowe badanego punktu w czasie symulacji
Prędkości kątowe badanego punktu w czasie symulacji
Przyspieszenia liniowe badanego punktu w czasie
Przyspieszenia kątowe badanego punktu w czasie
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
Dla pozostałych nóg z segmentu pierwszego przemieszczenia, prędkości i przyspieszenia różniły się względu na kąt nachylenia powierzchninóg z segmentu drugiego następowało jedynie przesunicie w czasie, spowodowane wykorzystanymitowaniu robota kroczącego zasadami ruch
Oczywiście oprócz wykresów odpowiedź układu otrzmuje się w postaci animacji ruchu całego zespołu w zbudowanym wirtualnym środowisku pracy.
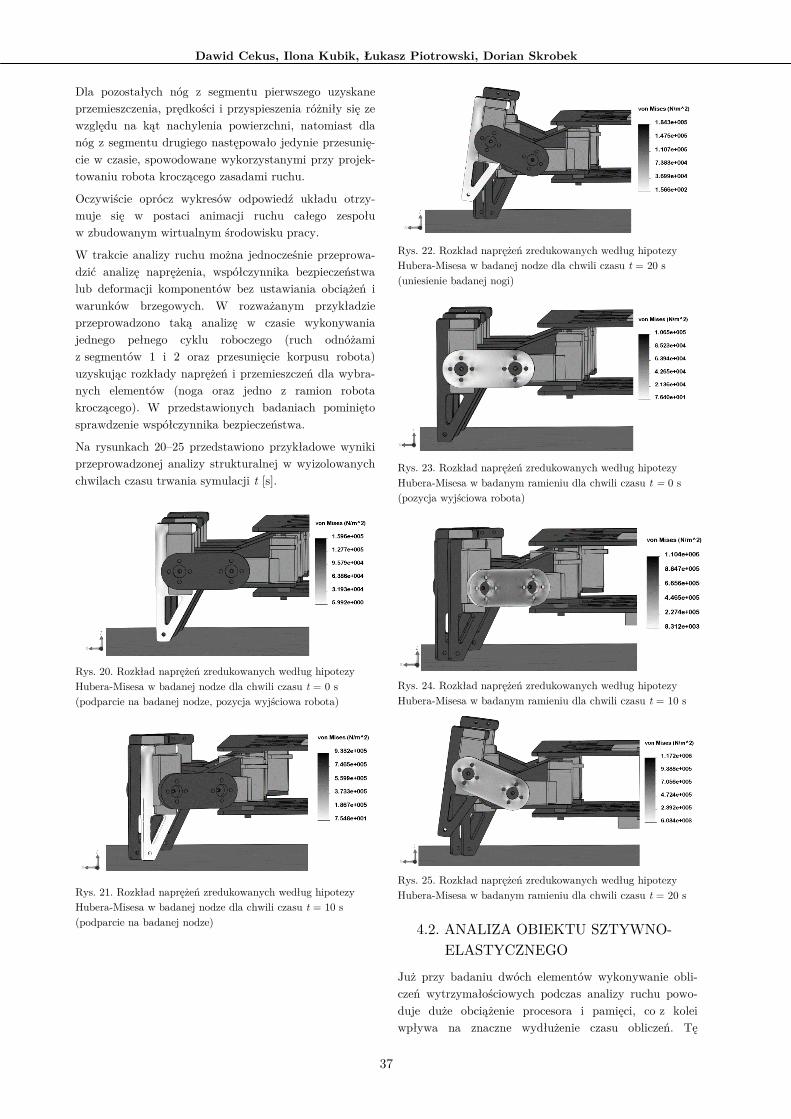
W trakcie analizy ruchu można jednocześnie przeprowdzić analizę naprężenia, współczynnika bezpieczeństwa lub deformacji komponentów bez ustawiania obciążeń i warunków brzegowych. W rozważanym przykładzie przeprowadzono taką analizę w czasie wykonjednego pełnego cyklu roboczego (ruch odnóżami z segmentów 1 i 2 oraz przesunięcie korpusu robota)uzyskując rozkłady naprężeń i przemieszczeń dla wybrnych elementów (noga oraz jedno z ramion robota kroczącego). W przedstawionych badaniach pominiętsprawdzenie współczynnika bezpieczeństwa.
Na rysunkach 20–25 przedstawiono przykładowe wyniki przeprowadzonej analizy strukturalnej w wychwilach czasu trwania symulacji t [s].
Rys. 20. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa w badanej nodze dla chwili czasu (podparcie na badanej nodze, pozycja wyjściowa
Rys. 21. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa w badanej nodze dla chwili czasu (podparcie na badanej nodze)
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
37
segmentu pierwszego uzyskane przemieszczenia, prędkości i przyspieszenia różniły się ze
powierzchni, natomiast dla jedynie przesunię-
wykorzystanymi przy projek-towaniu robota kroczącego zasadami ruchu.
Oczywiście oprócz wykresów odpowiedź układu otrzy-je się w postaci animacji ruchu całego zespołu
zbudowanym wirtualnym środowisku pracy.
W trakcie analizy ruchu można jednocześnie przeprowa-naprężenia, współczynnika bezpieczeństwa
deformacji komponentów bez ustawiania obciążeń i W rozważanym przykładzie
czasie wykonywania (ruch odnóżami
egmentów 1 i 2 oraz przesunięcie korpusu robota) uzyskując rozkłady naprężeń i przemieszczeń dla wybra-nych elementów (noga oraz jedno z ramion robota
nych badaniach pominięto nie współczynnika bezpieczeństwa.
przykładowe wyniki nej w wyizolowanych
. Rozkład naprężeń zredukowanych według hipotezy
dla chwili czasu t = 0 s pozycja wyjściowa robota)
. Rozkład naprężeń zredukowanych według hipotezy
dla chwili czasu t = 10 s
Rys. 22. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa w badanej nodze dla chwili czasu (uniesienie badanej nogi)
Rys. 23. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa w badanym ramieniu dla chwili czasu (pozycja wyjściowa robota)
Rys. 24. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa w badanym ramieniu dla chwili czasu
Rys. 25. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa w badanym ramieniu dla chwili czasu
4.2. ANALIZA OBIEKTU SZTYWNOELASTYCZNEGO
Już przy badaniu dwóch elementów wykonywanie oblczeń wytrzymałościowych podczas analizy ruchu powduje duże obciążenie procesora i pamięci, cowpływa na znaczne wydłużenie czasu obliczeń. Tę
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
. Rozkład naprężeń zredukowanych według hipotezy
dla chwili czasu t = 20 s
. Rozkład naprężeń zredukowanych według hipotezy
dla chwili czasu t = 0 s
. Rozkład naprężeń zredukowanych według hipotezy
dla chwili czasu t = 10 s
. Rozkład naprężeń zredukowanych według hipotezy
dla chwili czasu t = 20 s
ANALIZA OBIEKTU SZTYWNO-
dwóch elementów wykonywanie obli-wytrzymałościowych podczas analizy ruchu powo-
duje duże obciążenie procesora i pamięci, co z kolei znaczne wydłużenie czasu obliczeń. Tę
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
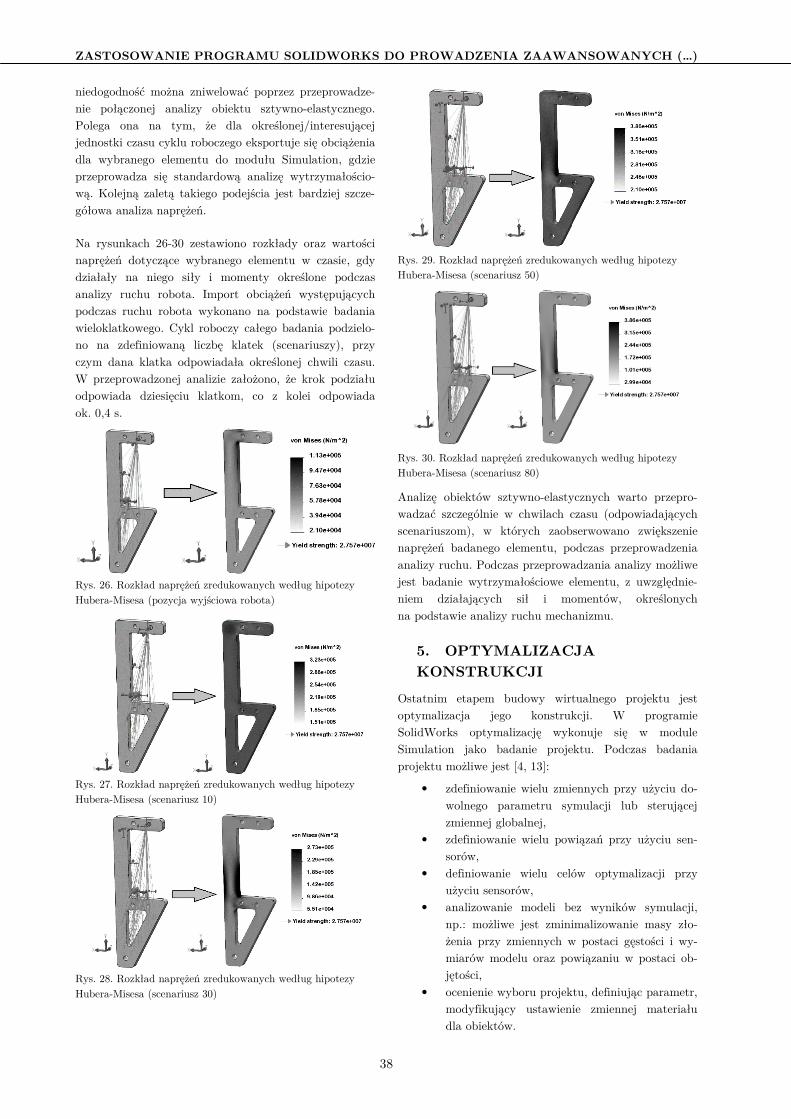
niedogodność można zniwelować poprzez przeprowadznie połączonej analizy obiektu sztywnPolega ona na tym, że dla określonej/interesującej jednostki czasu cyklu roboczego eksportuje się obciążenia dla wybranego elementu do modułu Simulation, gdzie przeprowadza się standardową analizę wytrzymałościwą. Kolejną zaletą takiego podejścia jest bardziej sgółowa analiza naprężeń.
Na rysunkach 26-30 zestawiono rozkłady oraz wartości naprężeń dotyczące wybranego elementu w czasiedziałały na niego siły i momenty określone podczas analizy ruchu robota. Import obciążeńpodczas ruchu robota wykonano na podstawiewieloklatkowego. Cykl roboczy całego badania no na zdefiniowaną liczbę klatek (scenariuszy)czym dana klatka odpowiadała określonW przeprowadzonej analizie założono, żeodpowiada dziesięciu klatkom, co z kolei ok. 0,4 s.
Rys. 26. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa (pozycja wyjściowa robota)
Rys. 27. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa (scenariusz 10)
Rys. 28. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa (scenariusz 30)
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
38
niedogodność można zniwelować poprzez przeprowadze-obiektu sztywno-elastycznego.
dla określonej/interesującej jednostki czasu cyklu roboczego eksportuje się obciążenia dla wybranego elementu do modułu Simulation, gdzie przeprowadza się standardową analizę wytrzymałościo-wą. Kolejną zaletą takiego podejścia jest bardziej szcze-
zestawiono rozkłady oraz wartości wybranego elementu w czasie, gdy
działały na niego siły i momenty określone podczas ń występujących
na podstawie badania badania podzielo-
(scenariuszy), przy kreślonej chwili czasu.
o, że krok podziału z kolei odpowiada
. Rozkład naprężeń zredukowanych według hipotezy
. Rozkład naprężeń zredukowanych według hipotezy
Rozkład naprężeń zredukowanych według hipotezy
Rys. 29. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa (scenariusz 50)
Rys. 30. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa (scenariusz 80)
Analizę obiektów sztywno-elastycznych warto przeprwadzać szczególnie w chwilach czasuscenariuszom), w których zaobserwowano zwiększenie naprężeń badanego elementu, podczas przeprowadzenia analizy ruchu. Podczas przeprowadzajest badanie wytrzymałościowe elementuniem działających sił i momentów, określonych na podstawie analizy ruchu mechanizmu.
5. OPTYMALIZACJA KONSTRUKCJI
Ostatnim etapem budowy wirtualnego projektu jest optymalizacja jego konstrukcji. W programie SolidWorks optymalizację wykonuje się w module Simulation jako badanie projektu. Podczas badania projektu możliwe jest [4, 13]:
• zdefiniowanie wielu zmiennych przy użyciu dwolnego parametru symulacji lub sterującej zmiennej globalnej,
• zdefiniowanie wielu powiązań przy użyciu sesorów,
• definiowanie wielu celówużyciu sensorów,
• analizowanie modeli bez wyników symulacji, np.: możliwe jest zminimalizowanieżenia przy zmiennych w postaci gęstości i wmiarów modelu oraz powiązaniu w postaci ojętości,
• ocenienie wyboru projekmodyfikujący ustawienie zmiennej materiału dla obiektów.
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH (…)
. Rozkład naprężeń zredukowanych według hipotezy
. Rozkład naprężeń zredukowanych według hipotezy
elastycznych warto przepro-w chwilach czasu (odpowiadających których zaobserwowano zwiększenie
naprężeń badanego elementu, podczas przeprowadzenia rzeprowadzania analizy możliwe
elementu, z uwzględnie-sił i momentów, określonych
podstawie analizy ruchu mechanizmu.
OPTYMALIZACJA
wirtualnego projektu jest o konstrukcji. W programie
Works optymalizację wykonuje się w module adanie projektu. Podczas badania
zmiennych przy użyciu do-wolnego parametru symulacji lub sterującej
powiązań przy użyciu sen-
celów optymalizacji przy
bez wyników symulacji, możliwe jest zminimalizowanie masy zło-
żenia przy zmiennych w postaci gęstości i wy-modelu oraz powiązaniu w postaci ob-
projektu, definiując parametr, ustawienie zmiennej materiału
Dawid Cekus, Ilona Kubik, Łukasz Piotrowski, Dorian Skrobek
39
W przypadku badanego heksapoda przeprowadzono przykładową optymalizację masy konstrukcji, przy następujących założeniach:
• grubość materiału, z którego wykonano elemen-ty składające się na ramiona robota, może zmieniać się w zakresie od 1 do 6 mm (para-metr a) z krokiem 1 mm,
• grubość materiału, z którego wykonano płyty składające się na korpus robota, może zmieniać się w zakresie od 2 do 6 mm (parametr b) z krokiem 1 mm,
• naprężenia zredukowane w elementach nie mo-gą przekraczać granicy plastyczności materiału, z którego je wykonano.
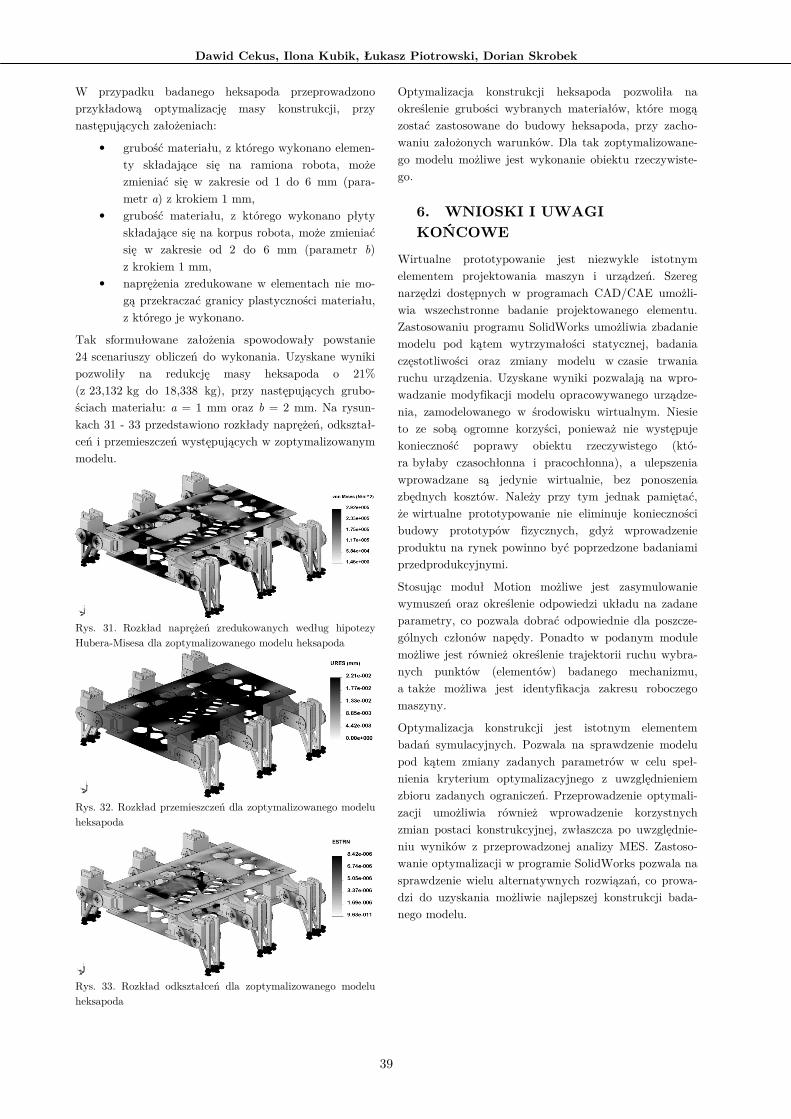
Tak sformułowane założenia spowodowały powstanie 24 scenariuszy obliczeń do wykonania. Uzyskane wyniki pozwoliły na redukcję masy heksapoda o 21% (z 23,132 kg do 18,338 kg), przy następujących grubo-ściach materiału: a = 1 mm oraz b = 2 mm. Na rysun-kach 31 - 33 przedstawiono rozkłady naprężeń, odkształ-ceń i przemieszczeń występujących w zoptymalizowanym modelu.
Rys. 31. Rozkład naprężeń zredukowanych według hipotezy Hubera-Misesa dla zoptymalizowanego modelu heksapoda
Rys. 32. Rozkład przemieszczeń dla zoptymalizowanego modelu heksapoda
Rys. 33. Rozkład odkształceń dla zoptymalizowanego modelu heksapoda
Optymalizacja konstrukcji heksapoda pozwoliła na określenie grubości wybranych materiałów, które mogą zostać zastosowane do budowy heksapoda, przy zacho-waniu założonych warunków. Dla tak zoptymalizowane-go modelu możliwe jest wykonanie obiektu rzeczywiste-go.
6. WNIOSKI I UWAGI KOŃCOWE
Wirtualne prototypowanie jest niezwykle istotnym elementem projektowania maszyn i urządzeń. Szereg narzędzi dostępnych w programach CAD/CAE umożli-wia wszechstronne badanie projektowanego elementu. Zastosowaniu programu SolidWorks umożliwia zbadanie modelu pod kątem wytrzymałości statycznej, badania częstotliwości oraz zmiany modelu w czasie trwania ruchu urządzenia. Uzyskane wyniki pozwalają na wpro-wadzanie modyfikacji modelu opracowywanego urządze-nia, zamodelowanego w środowisku wirtualnym. Niesie to ze sobą ogromne korzyści, ponieważ nie występuje konieczność poprawy obiektu rzeczywistego (któ-ra byłaby czasochłonna i pracochłonna), a ulepszenia wprowadzane są jedynie wirtualnie, bez ponoszenia zbędnych kosztów. Należy przy tym jednak pamiętać, że wirtualne prototypowanie nie eliminuje konieczności budowy prototypów fizycznych, gdyż wprowadzenie produktu na rynek powinno być poprzedzone badaniami przedprodukcyjnymi.
Stosując moduł Motion możliwe jest zasymulowanie wymuszeń oraz określenie odpowiedzi układu na zadane parametry, co pozwala dobrać odpowiednie dla poszcze-gólnych członów napędy. Ponadto w podanym module możliwe jest również określenie trajektorii ruchu wybra-nych punktów (elementów) badanego mechanizmu, a także możliwa jest identyfikacja zakresu roboczego maszyny.
Optymalizacja konstrukcji jest istotnym elementem badań symulacyjnych. Pozwala na sprawdzenie modelu pod kątem zmiany zadanych parametrów w celu speł-nienia kryterium optymalizacyjnego z uwzględnieniem zbioru zadanych ograniczeń. Przeprowadzenie optymali-zacji umożliwia również wprowadzenie korzystnych zmian postaci konstrukcyjnej, zwłaszcza po uwzględnie-niu wyników z przeprowadzonej analizy MES. Zastoso-wanie optymalizacji w programie SolidWorks pozwala na sprawdzenie wielu alternatywnych rozwiązań, co prowa-dzi do uzyskania możliwie najlepszej konstrukcji bada-nego modelu.

ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
Literatura
1. Agheli M., Qu L., Nestinger S.S.: SHeRO: Scalable hexapod robot for maintenance, repair, and operations
„Robotic and Computer-Integrated
2. Gomułka A., Herbuś K.: Wirtualne prototypowanie na przykładzie fotela ambulansu
nierskie. Gliwice: Instytut Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania,
2010, s. 25-29.
3. Kozłowski K., Dutkiewicz P., Wróblewski W.: Modelowanie i sterowanie robotów
PWN, 2017. ISBN 9788301140816.
4. Lombard M.: SolidWorks 2010 Bible, Wiley Publishing Inc.
5. Łodygowski T., Kąkol W.: Metoda elementów skończonych w wybranych zagadnieniach mechaniki konstrukcji
inżynierskich. Poznań: Politechnika Poznańs
6. Pahl G., Beitz W., Feldhusen J., Grote K. H.,: Engineering
978-1846283185.
7. Pater Z., Tofil A.: Wirtualne prototypowanie w budowie maszyn
Chełm 2004. http://kis.pwszchelm.pl/publikacje/III/Pater.pdf
8. Siciliano B., Sciavicco L. Villani L., Oriolo G.: Robotic
2009. ISBN 978-1-84628-641-4.
9. Zhang H., Liu Y., Zhao J., Yan J.: Development of a
“Journal of Bionic Engineering” 2014,
10. Zielińska T.: Maszyny kroczące. Warszawa: Wyd.
11. Wang G.: Definition and review of virtual prototyping
Engineering” 2002, 2(3), p. -236, , DOI: 10.1115/1.1526508
12. http://www.par.pl/Forum-mlodych/Kolo
(dostęp 05.06.2017)
13. http://www.solidworks.com/ (dostęp 0
Artykuł dostępny na podstawie licencji Creative Commons Uznanie autorstwa 3.0 Polska. http://creativecommons.org/licenses/by/3.0/pl
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH
40
Nestinger S.S.: SHeRO: Scalable hexapod robot for maintenance, repair, and operations
Integrated Manufacturing” 2014, 30, p.478-488.
Gomułka A., Herbuś K.: Wirtualne prototypowanie na przykładzie fotela ambulansu: w
nierskie. Gliwice: Instytut Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania,
Kozłowski K., Dutkiewicz P., Wróblewski W.: Modelowanie i sterowanie robotów. Warszawa:
Lombard M.: SolidWorks 2010 Bible, Wiley Publishing Inc. Indianapolis, Indiana, 2010. ISBN 978
Łodygowski T., Kąkol W.: Metoda elementów skończonych w wybranych zagadnieniach mechaniki konstrukcji
Politechnika Poznańska, 2003.
Pahl G., Beitz W., Feldhusen J., Grote K. H.,: Engineering design: a systematic approach
Pater Z., Tofil A.: Wirtualne prototypowanie w budowie maszyn. W: III Konferencja Entuzjastów Informatyki.
http://kis.pwszchelm.pl/publikacje/III/Pater.pdf dostęp: 2 X 2017
Siciliano B., Sciavicco L. Villani L., Oriolo G.: Robotic – modelling, planning and control. London:
Zhang H., Liu Y., Zhao J., Yan J.: Development of a bionic hexapod robot for walking on unstructured terrain
” 2014, 11, 2014, p.176-187.
. Warszawa: Wyd. Nauk. PWN, 2014. ISBN 9788301178154.
review of virtual prototyping. “Journal of Computing and Information Science in
DOI: 10.1115/1.1526508 .
mlodych/Kolo-Naukowe-Elektronikow-Praktykow/robot-kroczacy
http://www.solidworks.com/ (dostęp 05.06.2017)
Artykuł dostępny na podstawie licencji Creative Commons Uznanie autorstwa 3.0 Polska. http://creativecommons.org/licenses/by/3.0/pl
ZASTOSOWANIE PROGRAMU SOLIDWORKS DO PROWADZENIA ZAAWANSOWANYCH (…)
Nestinger S.S.: SHeRO: Scalable hexapod robot for maintenance, repair, and operations.
: wybrane problemy inży-
nierskie. Gliwice: Instytut Automatyzacji Procesów Technologicznych i Zintegrowanych Systemów Wytwarzania,
. Warszawa: Wyd. Nauk.
ISBN 978-0-470-55481-4.
Łodygowski T., Kąkol W.: Metoda elementów skończonych w wybranych zagadnieniach mechaniki konstrukcji
design: a systematic approach, Springer 2007. ISBN
Entuzjastów Informatyki.
modelling, planning and control. London: Springer, ,
bionic hexapod robot for walking on unstructured terrain,
9788301178154.
Journal of Computing and Information Science in
kroczacy-heksapod
Artykuł dostępny na podstawie licencji Creative Commons Uznanie autorstwa 3.0 Polska.


















