ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU …kms.polsl.pl/mi/pelne_27/01_27_58.pdf ·...
8
MODELOWANIE INŻYNIERSKIE 2016 nr 58, ISSN 1896-771X 5 ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU SAMOCHODU OSOBOWEGO Krzysztof Augustynek 1a , Kornel Warwas 1b 1 Katedra Informatyki i Automatyki, Akademia Techniczno-Humanistyczna w Bielsku-Białej a [email protected], b [email protected] Streszczenie W pracy przedstawiono metodę optymalizacji ruchu samochodu osobowego podczas jazdy po nawierzchni o zmiennej przyczepności. Model matematyczny pojazdu sformułowano, korzystając w zapisie z transformacji jedno- rodnych oraz współrzędnych złączowych. Podczas optymalizacji dobierano przebieg momentów hamujących dzia- łających na poszczególne koła pojazdu, tak aby zapewnić utrzymanie się pojazdu w szerokości jezdni. Do rozwią- zania zadania optymalizacji dynamicznej zastosowano nowatorską metodę PSO (Particle Swarm Optimisation). Metoda ta, w odróżnieniu od klasycznych gradientowych metod optymalizacji, umożliwia znajdowanie rozwiązań globalnie optymalnych. W pracy przedstawiono wnioski wypływające z uzyskanych wyników oraz zastosowanej metody optymalizacji. Słowa kluczowe: samochód osobowy, modelowanie komputerowe, optymalizacja dynamiczna, Particle Swarm Optimization AN APPLICATION OF PSO METHOD IN A MOTION OPTIMIZATION OF A PASSENGER CAR Summary The paper presents a method of passenger car motion optimisation while driving on the road surface with variable friction. A mathematical model of the vehicle has been formulated with using homogenous transformation and joint coordinates. In order to maintenance position of the vehicle in the width of the road optimisation problem has been formulated and solved. During optimisation braking torques courses applied to each wheel of the car have been determined. In order to solve dynamic optimisation problem an innovative Particle Swarm Optimisa- tion (PSO) method has been applied. This method, in contrast to the classical gradient optimisation methods, al- lows us to find global optimal solution. Results obtained during numerical simulations have been presented and discussed. Keywords: passenger car, numerical simulation, dynamic optimisation, Particle Swarm Optimization 1. WSTĘP Podczas projektowania pojazdów szczególny nacisk kładzie się na bezpieczeństwo oraz komfort kierowcy i pasażerów. Zaprojektowanie pojazdu spełniającego te kryteria wymaga wykonania szeregu testów drogowych oraz badań stanowiskowych, co się wiąże z dodatkowymi kosztami. Przygotowanie wirtualnych modeli pojazdów w pierwszym etapie prac projektowych pozwala zmniej- szyć koszty oraz dokonać wstępnej oceny zachodzących zjawisk [1, 2, 3, 21]. W wielu przypadkach symulacje komputerowe są jedynym możliwym sposobem otrzyma- nia rozwiązania. Sytuacja taka zachodzi na przykład przy rekonstrukcji przebiegu kolizji lub w symulacjach sytuacji krytycznych. Tworzone w tym zakresie modele powinny odzwierciedlać rzeczywistość, a czas obliczeń
Transcript of ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU …kms.polsl.pl/mi/pelne_27/01_27_58.pdf ·...

MODELOWANIE INŻYNIERSKIE 2016 nr 58, ISSN 1896-771X
5
ZASTOSOWANIE METODY PSO
W OPTYMALIZACJI RUCHU SAMOCHODU
OSOBOWEGO
Krzysztof Augustynek1a, Kornel Warwas1b
1Katedra Informatyki i Automatyki, Akademia Techniczno-Humanistyczna w Bielsku-Białej [email protected], [email protected]
Streszczenie W pracy przedstawiono metodę optymalizacji ruchu samochodu osobowego podczas jazdy po nawierzchni o
zmiennej przyczepności. Model matematyczny pojazdu sformułowano, korzystając w zapisie z transformacji jedno-
rodnych oraz współrzędnych złączowych. Podczas optymalizacji dobierano przebieg momentów hamujących dzia-
łających na poszczególne koła pojazdu, tak aby zapewnić utrzymanie się pojazdu w szerokości jezdni. Do rozwią-
zania zadania optymalizacji dynamicznej zastosowano nowatorską metodę PSO (Particle Swarm Optimisation).
Metoda ta, w odróżnieniu od klasycznych gradientowych metod optymalizacji, umożliwia znajdowanie rozwiązań
globalnie optymalnych. W pracy przedstawiono wnioski wypływające z uzyskanych wyników oraz zastosowanej
metody optymalizacji.
Słowa kluczowe: samochód osobowy, modelowanie komputerowe, optymalizacja dynamiczna, Particle Swarm
Optimization
AN APPLICATION OF PSO METHOD IN A MOTION
OPTIMIZATION OF A PASSENGER CAR
Summary The paper presents a method of passenger car motion optimisation while driving on the road surface with variable
friction. A mathematical model of the vehicle has been formulated with using homogenous transformation and
joint coordinates. In order to maintenance position of the vehicle in the width of the road optimisation problem
has been formulated and solved. During optimisation braking torques courses applied to each wheel of the car
have been determined. In order to solve dynamic optimisation problem an innovative Particle Swarm Optimisa-
tion (PSO) method has been applied. This method, in contrast to the classical gradient optimisation methods, al-
lows us to find global optimal solution. Results obtained during numerical simulations have been presented and
discussed.
Keywords: passenger car, numerical simulation, dynamic optimisation, Particle Swarm Optimization
1. WSTĘP
Podczas projektowania pojazdów szczególny nacisk
kładzie się na bezpieczeństwo oraz komfort kierowcy i
pasażerów. Zaprojektowanie pojazdu spełniającego te
kryteria wymaga wykonania szeregu testów drogowych
oraz badań stanowiskowych, co się wiąże z dodatkowymi
kosztami. Przygotowanie wirtualnych modeli pojazdów
w pierwszym etapie prac projektowych pozwala zmniej-
szyć koszty oraz dokonać wstępnej oceny zachodzących
zjawisk [1, 2, 3, 21]. W wielu przypadkach symulacje
komputerowe są jedynym możliwym sposobem otrzyma-
nia rozwiązania. Sytuacja taka zachodzi na przykład
przy rekonstrukcji przebiegu kolizji lub w symulacjach
sytuacji krytycznych. Tworzone w tym zakresie modele
powinny odzwierciedlać rzeczywistość, a czas obliczeń
ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU SAMOCHODU OSOBOWEGO
6
powinien być stosunkowo krótki, aby możliwe było
prowadzenie analiz wariantowych [20, 23].
W literaturze można spotkać wiele pozycji poświęconych
modelowaniu pojazdów jako układów wieloczłonowych.
Do opisu tych układów wykorzystuje się współrzędne
absolutne, naturalne lub złączowe. Najczęściej wykorzy-
stuje się współrzędne absolutne, które prowadzą do
układów równań różniczkowo-algebraicznych. Wypro-
wadza się je, korzystając z równań Lagrange’a I rodzaju
lub równań Newtona-Eulera [2, 6]. Istnieją również
prace, w których do opisu ruchu pojazdu stosuje się
współrzędne złączowe [1, 21, 23, 25]. Dynamiczne rów-
nania ruchu pojazdu w tych współrzędnych najczęściej
formułuje się, bazując na równaniach Lagrange’a II
rodzaju. Takie podejście prowadzi do układów o mniej-
szej liczbie równań, niejednokrotnie bez definiowania
dodatkowych równań więzów [1, 10, 20, 24, 25]. W
pracach [1, 7, 20, 21, 23, 24] autorzy przedstawili sposób
modelowania pojazdów osobowych i wieloczłonowych o
różnym stopniu skomplikowania, adaptując metody
stosowane w robotyce. Do transformacji współrzędnych
zastosowano metodę przekształceń jednorodnych, umoż-
liwiającą łatwe modelowanie pojazdów, traktując je jako
otwarte łańcuchy kinematyczne o strukturach drzewa.
Wirtualne modele pojazdów można wykorzystać do
symulacji ruchu pojazdów w sytuacjach niebezpiecznych
takich jak wymijanie, wyprzedzanie, jazda po łuku czy
jazda po jezdni o obniżonym współczynniku przyczepno-
ści. Szereg artykułów związanych z modelowaniem i
optymalizacją ruchu pojazdu w sytuacjach krytycznych
przedstawiono w [11, 12]. W pracy [13] omówiono waż-
niejsze aspekty związane z modelowania bezpieczeństwa
pojazdów samochodowych. Autor wśród głównych
przyczyn wypadków występujących na drogach wymie-
nia niedostosowanie prędkości pojazdu do warunków
drogowych. W tym przypadku wirtualny model pojazdu
może stanowić podstawę do sygnalizacji zagrożeń przy
wykonywaniu różnych manewrów w tym jazdy po łuku.
Powszechnie w wielu ośrodkach realizowane są badania
dotyczące metod poprawy skuteczności układów hamul-
cowych, zmierzające m.in. do poprawy ich konstrukcji.
Autorzy pracy [22] przedstawiają wyniki badań, z któ-
rych wynika, że stan nawierzchni oraz stopień jej zanie-
czyszczenia wpływają znacząco na długość drogi hamo-
wania. Sprawny układ hamulcowy może okazać się
niedostatecznie skuteczny, gdy pojazd porusza się po
drodze zanieczyszczonej. Dlatego też istotne są systemy
wspomagające, działające niezależnie od woli kierowcy.
Projektowanie takich systemów jest bardzo trudne.
Zależy od wielu czynników zewnętrznych i istnieje wiele
możliwych wariantów sytuacji drogowych, w których
taki układ powinien zareagować. Występuje zatem
potrzeba kalibracji oraz walidacji istniejących systemów
wspomagających, która może być wykonana poprzez
wykorzystanie wyników uzyskanych z optymalizacji
dynamicznej. Metody optymalizacji do rozwiązywania
zadań z zakresu sterowania układami pojazdów samo-
chodowych stosowano w między innymi w pracach [7,
23, 24]. Autorzy wykorzystali algorytmy o różnym
stopniu skomplikowania do doboru momentów hamują-
cych działających na koła pojazdu w sytuacjach kry-
tycznych w samochodach wieloczłonowych.
Do rozwiązania zadania optymalizacji dynamicznej
ruchu pojazdu najczęściej stosowane są klasyczne gra-
dientowe lub bezgradientowe metody optymalizacji [23,
24]. Wadą tych metod jest ich zbieżność do ekstremów
lokalnych, w zależności od wybranego punktu startowe-
go. Wolnymi od tych wad są metody ewolucyjne oraz
metoda PSO (ang. Particle Swarm Optimization). Oba
podejścia umożliwiają znajdowanie ekstremów global-
nych i rozpoczynają obliczenia z wielu punktów począt-
kowych [4, 8, 15, 18, 19]. Niezależenie od zastosowanej
metody rozwiązania zadania optymalizacji dynamicznej
dużym problem pozostaje długi obliczeń. Uniemożliwia
to wykorzystanie takiego modelu bezpośrednio w ste-
rowniku urządzenia. Podejmowane są jednak próby
sterowania układami pojazdu w czasie rzeczywistym
[12]. W tym zakresie najczęściej wykorzystuje się̨ sztucz-
ne sieci neuronowe, dla których zbiorem uczącym mogą
być np. wyniki rozwiązań szeregu zadań optymalizacji
dynamicznej [23, 24]. W pracach [5, 14] wskazano, że
taki układ sterowania może być wyzwalany w momencie,
gdy następuje zmiana warunków kontaktu koła ogumio-
nego z nawierzchnią drogi, poprzez śledzenie wartości
siły stycznej działającej na oponę.
2. MODEL MATEMATYCZNY
SAMOCHODU
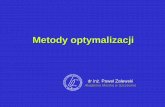
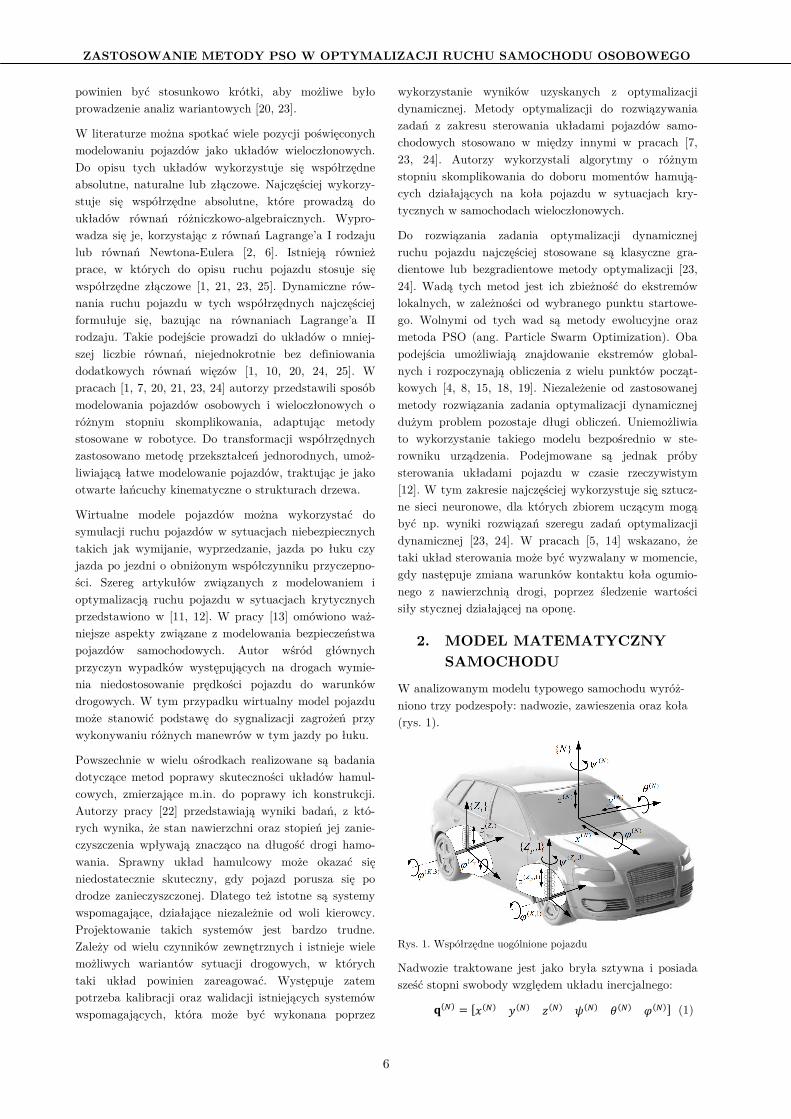
W analizowanym modelu typowego samochodu wyróż-
niono trzy podzespoły: nadwozie, zawieszenia oraz koła
(rys. 1).
Rys. 1. Współrzędne uogólnione pojazdu
Nadwozie traktowane jest jako bryła sztywna i posiada
sześć stopni swobody względem układu inercjalnego:
���� = ����� ���� ��� ��� ���� ���� (1)
KRZYSZTOF AUGUSTYNEK,
gdzie: ����, ����, ��� – współrzędne nadwozia wzgl
dem układu inercjalnego,
���, ����, ���� - kąty Eulera ZYX.
Zawieszenia przednie pojazdu są traktowane jako niez
leżne i każde z nich posiada dwa stopnie swobody w
ruchu względem nadwozia. Wektor współrzędnych
uogólnionych można zapisać w postaci:
����,�� = ����,�� ���,���, � =gdzie: ���,�� - ugięcie zawieszenia,
��� ,�� - kąt skręcenia koła.
Zawieszenie tylne zostało zamodelowane jako zależne i
jego ruch jest opisany następującym wektorem wspó
rzędnych uogólnionych:
����� = ����� ����� gdzie: ���� - ugięcie zawieszenia,
����� - kąt obrotu belki tylnego zawieszenia.
Koła w ruchu względnym posiadają jeden stopień sw
body ���,��, � = 1,… ,4 będący kątem obrotu względnego:
���� = ����,�� ���,�� ���,��Dynamiczne równania ruchu pojazdu wyprowadzono z
równań Lagrange’a II rodzaju korzystając w zapisie z
przekształceń jednorodnych [1, 7, 2
postać tych równań można przedstawić następująco:
�! " #$% = &#$'�! = (
gdzie: – macierz mas,
� = ����� ���� ���� ' - wektor współrzędnych
uogólnionych pojazdu,
#$ – macierz więzów,
% - wektor niewiadomych reakcji,
& – wektor zawierający siły odśrodkowe, girosk
powe, Coriolisa oraz zewnętrzne,
( – wektor prawych stron równań́
Siły oddziaływania jezdni na koła pojazdu wyznaczane
są na podstawie modelu opony Dugoffa-
z modyfikacją Uffelmanna [1, 21, 23]. Model ten
teryzuje się małą liczbą współczynników empirycznych,
które można dobierać na podstawie podobieństwa do
innych opon. Zalety modelu wpłynęły na jego częste
wykorzystywanie w autorskich programach
23].
3. SFORMUŁOWANIE ZADANIA
OPTYMALIZACJI
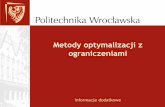
W dalszej części pracy analizowany jest ruch pojazdu po
łuku. W trakcie ruchu następuje zmiana rodzaju n
wierzchni z nawierzchni o współczynniku przyczepności )* na )+, gdzie )+ , )*, w rezultacie czego pojazd
wypada poza jezdnię. Celem optymalizacji jest taki
dobór momentów hamujących działających na poszcz
gólne koła pojazdu podczas manewru, aby spadek prę
KRZYSZTOF AUGUSTYNEK, KORNEL WARWAS
7
współrzędne nadwozia wzglę-
kąty Eulera ZYX.
Zawieszenia przednie pojazdu są traktowane jako nieza-
leżne i każde z nich posiada dwa stopnie swobody w
ruchu względem nadwozia. Wektor współrzędnych
�� = 1,2 (2)
Zawieszenie tylne zostało zamodelowane jako zależne i
jego ruch jest opisany następującym wektorem współ-
� (3)
zawieszenia.
Koła w ruchu względnym posiadają jeden stopień swo-
będący kątem obrotu względnego:
� ���,.� �4� Dynamiczne równania ruchu pojazdu wyprowadzono z
równań Lagrange’a II rodzaju korzystając w zapisie z
, 25]. Macierzową
postać tych równań można przedstawić następująco:
�5�
wektor współrzędnych
,
ktor zawierający siły odśrodkowe, girosko-
wektor prawych stron równań ́więzów.
Siły oddziaływania jezdni na koła pojazdu wyznaczane
-Fenchera-Segela,
Model ten charak-
liczbą współczynników empirycznych,
które można dobierać na podstawie podobieństwa do
innych opon. Zalety modelu wpłynęły na jego częste
wykorzystywanie w autorskich programach [1, 7, 20, 21,
SFORMUŁOWANIE ZADANIA
pracy analizowany jest ruch pojazdu po
łuku. W trakcie ruchu następuje zmiana rodzaju na-
z nawierzchni o współczynniku przyczepności
, w rezultacie czego pojazd
Celem optymalizacji jest taki
momentów hamujących działających na poszcze-
gólne koła pojazdu podczas manewru, aby spadek pręd-
kości był jak najmniejszy, a jednocześnie pojazd utrz
mał trajektorię w granicach jezdni
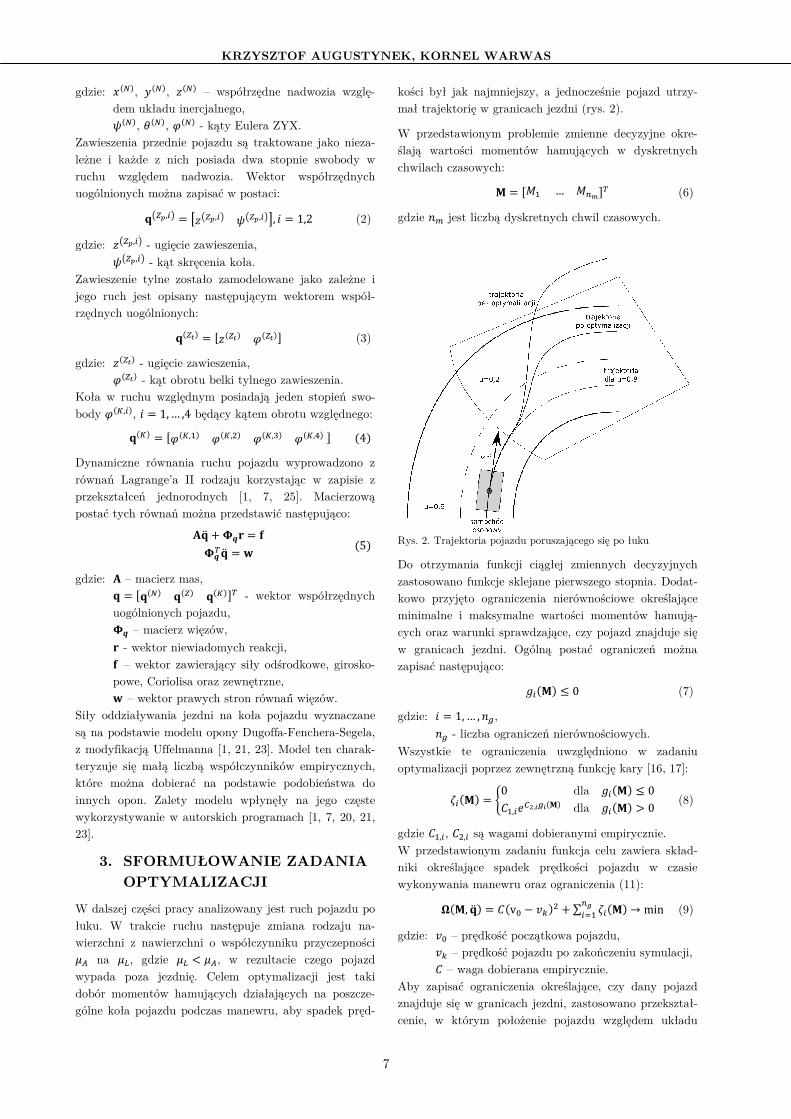
W przedstawionym problemie zmienne decyzyjne okr
ślają wartości momentów hamujących w dyskretnych
chwilach czasowych:
0 = �1� …gdzie 23 jest liczbą dyskretnych chwil czasowych.
Rys. 2. Trajektoria pojazdu poruszającego się po łuku
Do otrzymania funkcji ciągłej zmiennych decyzyjnych
zastosowano funkcje sklejane pierwszego stopnia. Doda
kowo przyjęto ograniczenia nierównościowe określające
minimalne i maksymalne wartości
cych oraz warunki sprawdzające,
w granicach jezdni. Ogólną postać ograniczeń można
zapisać następująco:
4��0� 5gdzie: � = 1,… , 26, 26 - liczba ograniczeń nierównościowych.
Wszystkie te ograniczenia uwzględniono w zadaniu
optymalizacji poprzez zewnętrzną funkcję kary [
7��0� = 80:�,�;<=,>6>�0�gdzie :�,�, :�,� są wagami dobieran
W przedstawionym zadaniu funkcja
niki określające spadek prędkości pojazdu w czasie
wykonywania manewru oraz ogranicz
?�0, �! � = :�vA B CD�� "gdzie: CA – prędkość początkowa pojazdu,
CD – prędkość pojazdu po zakończeniu symulacji,
: – waga dobierana empirycznie.
Aby zapisać ograniczenia określające
znajduje się w granicach jezdni, zastosowano przekszta
cenie, w którym położenie pojazdu względem układu
kości był jak najmniejszy, a jednocześnie pojazd utrzy-
jezdni (rys. 2).
W przedstawionym problemie zmienne decyzyjne okre-
wartości momentów hamujących w dyskretnych
1EF ' (6)
jest liczbą dyskretnych chwil czasowych.
Trajektoria pojazdu poruszającego się po łuku
zmiennych decyzyjnych
zastosowano funkcje sklejane pierwszego stopnia. Dodat-
kowo przyjęto ograniczenia nierównościowe określające
minimalne i maksymalne wartości momentów hamują-
czy pojazd znajduje się
lną postać ograniczeń można
� 0 (7)
ograniczeń nierównościowych.
graniczenia uwzględniono w zadaniu
zewnętrzną funkcję kary [16, 17]:
dla 4��0� 5 0� dla 4��0� G 0H (8)
dobieranymi empirycznie.
W przedstawionym zadaniu funkcja celu zawiera skład-
niki określające spadek prędkości pojazdu w czasie
wykonywania manewru oraz ograniczenia (11):
∑ 7��0�EJ�K� → min (9)
prędkość początkowa pojazdu,
prędkość pojazdu po zakończeniu symulacji,
empirycznie.
Aby zapisać ograniczenia określające, czy dany pojazd
zastosowano przekształ-
w którym położenie pojazdu względem układu
ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU SAMOCHODU OSOBOWEGO
8
inercjalnego jest określone za pomocą współrzędnych
geodezyjnych. Jak wykazały numeryczne badania symu-
lacyjne, trajektoria pojazdu poruszającego ze stałym
skrętem kół może być przybliżona za pomocą krzywej
eliptycznej. Położenie dowolnego punktu P leżącego na
takiej krzywej względem układu inercjalnego można
zapisać zależnością wektorową:
%Q = %A " %RQ�S� (10)
gdzie: %A – wektor określający położenie początku
układu {U}, związanego z elipsoidą, względem
układu inercjalnego {}, %RQ�S� = ��RQ�S� �RQ�S� 0�' – wektor określający po-
łożenie punktu P względem układu {U} związane-
go z elipsoidą.
Elementy wektora %RQ�S� można wyznaczyć następująco
[9]:
%RQ�S� = W XYZ[��1 B ;�� cos �0 _ (11)
gdzie: X = `a�bc= def=g – promień krzywizny,
; = 1 B hi`j� – pierwszy mimośród,
� – kąt nachylenia prostej normalnej do elipsy
przechodzącej przez punkt P.
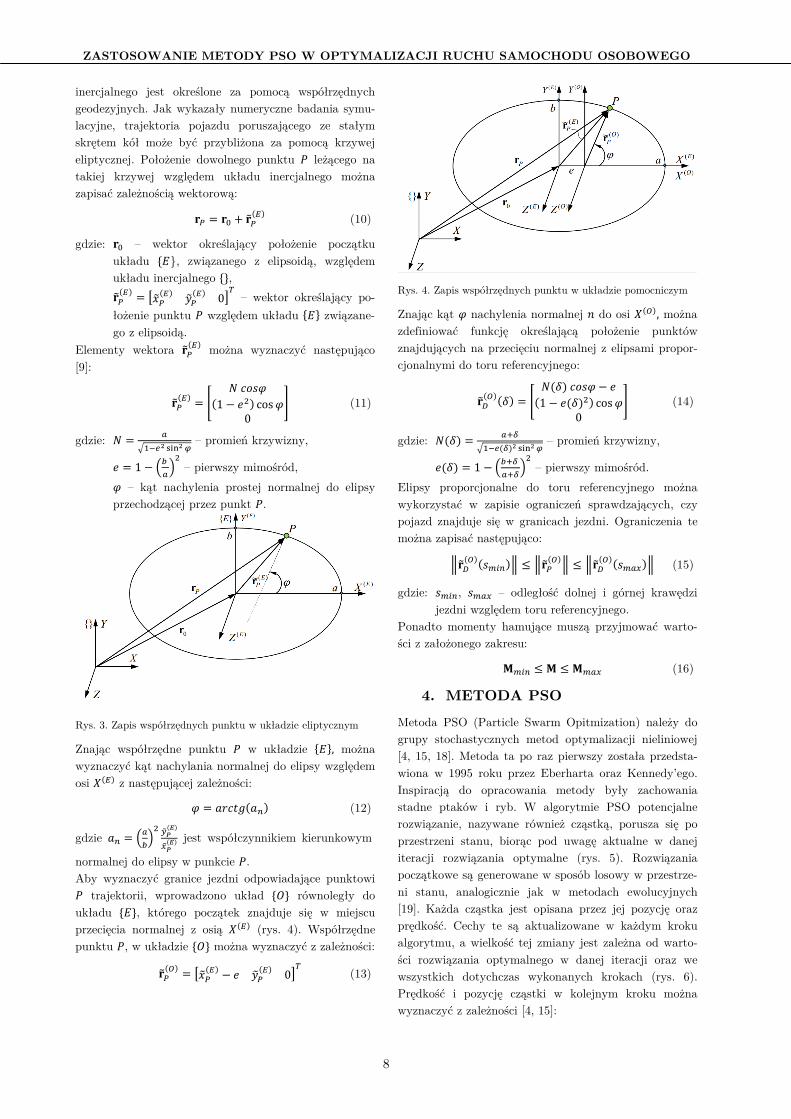
Rys. 3. Zapis współrzędnych punktu w układzie eliptycznym
Znając współrzędne punktu P w układzie {U}, można
wyznaczyć kąt nachylania normalnej do elipsy względem
osi k�S� z następującej zależności:
� = lmYn4�lE� (12)
gdzie lE = h`ij� oRp�q�rRp�q� jest współczynnikiem kierunkowym
normalnej do elipsy w punkcie P.
Aby wyznaczyć granice jezdni odpowiadające punktowi P trajektorii, wprowadzono układ {s} równoległy do
układu {U}, którego początek znajduje się w miejscu
przecięcia normalnej z osią k�S� (rys. 4). Współrzędne
punktu P, w układzie {s} można wyznaczyć z zależności:
%RQ�t� = ��RQ�S� B ; �RQ�S� 0�' (13)
Rys. 4. Zapis współrzędnych punktu w układzie pomocniczym
Znając kąt � nachylenia normalnej 2 do osi k�t�, można
zdefiniować funkcję określającą położenie punktów
znajdujących na przecięciu normalnej z elipsami propor-
cjonalnymi do toru referencyjnego:
%Ru�t��v� = W X�v�YZ[� B ;�1 B ;�v��� cos �0 _ (14)
gdzie: X�v� = `wxa�bc�x�= def=g – promień krzywizny,
;�v� = 1 B hiwx`wxj� – pierwszy mimośród.
Elipsy proporcjonalne do toru referencyjnego można
wykorzystać w zapisie ograniczeń sprawdzających, czy
pojazd znajduje się w granicach jezdni. Ograniczenia te
można zapisać następująco:
y%Ru�t��[3�E�y 5 y%RQ�t�y 5 y%Ru�t��[3`r�y (15)
gdzie: [3�E, [3`r – odległość dolnej i górnej krawędzi
jezdni względem toru referencyjnego.
Ponadto momenty hamujące muszą przyjmować warto-
ści z założonego zakresu:
03�E 5 0 5 03`r (16)
4. METODA PSO
Metoda PSO (Particle Swarm Opitmization) należy do
grupy stochastycznych metod optymalizacji nieliniowej
[4, 15, 18]. Metoda ta po raz pierwszy została przedsta-
wiona w 1995 roku przez Eberharta oraz Kennedy’ego.
Inspiracją do opracowania metody były zachowania
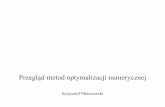
stadne ptaków i ryb. W algorytmie PSO potencjalne
rozwiązanie, nazywane również cząstką, porusza się po
przestrzeni stanu, biorąc pod uwagę aktualne w danej
iteracji rozwiązania optymalne (rys. 5). Rozwiązania
początkowe są generowane w sposób losowy w przestrze-
ni stanu, analogicznie jak w metodach ewolucyjnych
[19]. Każda cząstka jest opisana przez jej pozycję oraz
prędkość. Cechy te są aktualizowane w każdym kroku
algorytmu, a wielkość tej zmiany jest zależna od warto-
ści rozwiązania optymalnego w danej iteracji oraz we
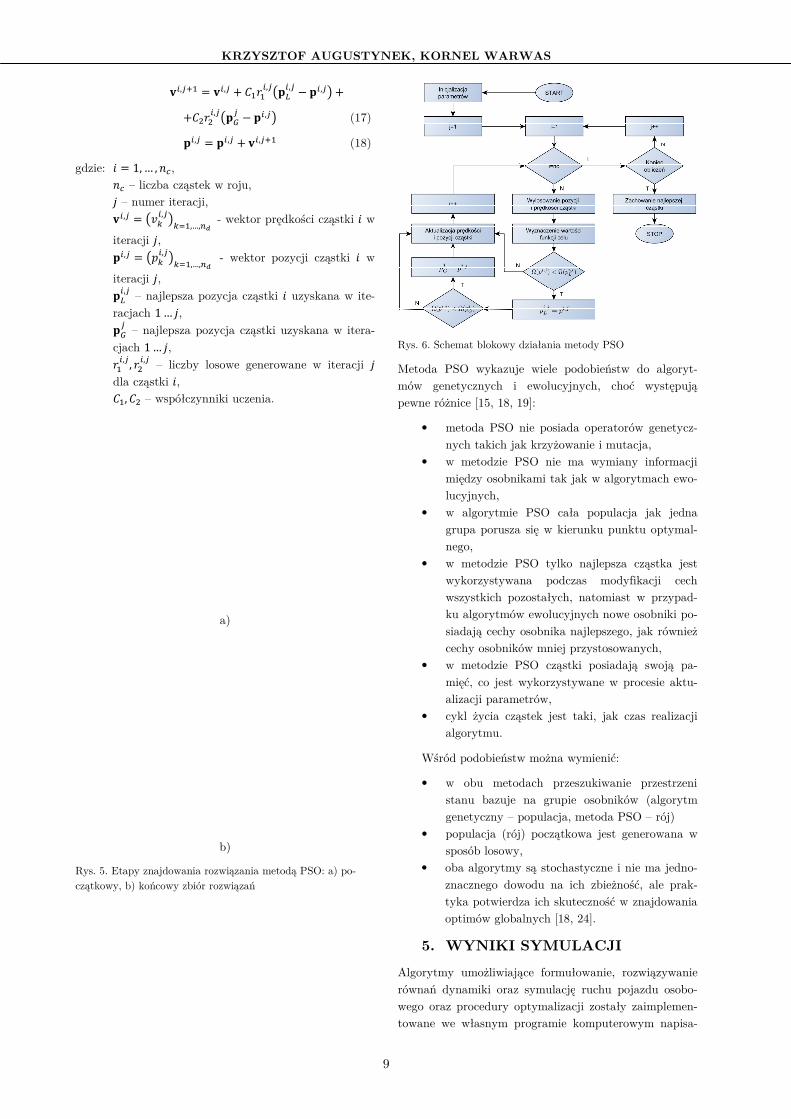
wszystkich dotychczas wykonanych krokach (rys. 6).
Prędkość i pozycję cząstki w kolejnym kroku można
wyznaczyć z zależności [4, 15]:
KRZYSZTOF AUGUSTYNEK,
z�,{w� = z�,{ " :�m��,{�|+� ":�m��,{�|}{ B |�,{� |�,{ = |�,{ " z�,{w� gdzie: � = 1,… , 2~, 2~ – liczba cząstek w roju, � – numer iteracji, z�,{ = �CD�,{�DK�,…,E� - wektor prędkości cząstki
iteracji �, |�,{ = ��D�,{�DK�,…,E� - wektor pozycji cząstki
iteracji �, |+�,{ – najlepsza pozycja cząstki �racjach 1… �, |}{ – najlepsza pozycja cząstki uzyskana w iter
cjach 1… �, m��,{ , m��,{ – liczby losowe generowane w iteracji
dla cząstki �, :�, :� – współczynniki uczenia.
a)
b)
Rys. 5. Etapy znajdowania rozwiązania metodą PSO
czątkowy, b) końcowy zbiór rozwiązań
KRZYSZTOF AUGUSTYNEK, KORNEL WARWAS
9
� +�,{ B |�,{� "
� (17)
(18)
wektor prędkości cząstki � w
wektor pozycji cząstki � w
� uzyskana w ite-
najlepsza pozycja cząstki uzyskana w itera-
liczby losowe generowane w iteracji �
Etapy znajdowania rozwiązania metodą PSO: a) po-
Rys. 6. Schemat blokowy działania metody PSO
Metoda PSO wykazuje wiele podobieństw do algory
mów genetycznych i ewolucyjnych, choć występują
pewne różnice [15, 18, 19]:
• metoda PSO nie posiada operatorów genetyc
nych takich jak krzyżowanie i mutacja,
• w metodzie PSO nie ma wymiany informacji
między osobnikami tak jak w algorytm
lucyjnych,
• w algorytmie PSO cała populacja jak jedna
grupa porusza się w kierunku punktu optyma
nego,
• w metodzie PSO tylko najlepsza cząstka jest
wykorzystywana podczas modyfikacji cech
wszystkich pozostałych, natomiast w przypa
ku algorytmów ewolucyjnych nowe osobniki p
siadają cechy osobnika najlepszego, jak również
cechy osobników mniej przystosowanych
• w metodzie PSO cząstki posiadają swoją p
mięć, co jest wykorzystywane w procesie akt
alizacji parametrów,
• cykl życia cząstek jest taki
algorytmu.
Wśród podobieństw można wymienić:
• w obu metodach przeszukiwanie przestrzeni
stanu bazuje na grupie osobników (algorytm
genetyczny – populacja, metoda PSO
• populacja (rój) początkowa jest generowana w
sposób losowy,
• oba algorytmy są stochastyczne i nie ma jedn
znacznego dowodu na ich zbieżność,
tyka potwierdza ich skuteczność w znajdowania
optimów globalnych [18, 2
5. WYNIKI SYMULACJI
Algorytmy umożliwiające formułowanie,
równań dynamiki oraz symulację
wego oraz procedury optymalizacji zostały zaimpleme
towane we własnym programie komputerowym napis
Schemat blokowy działania metody PSO
Metoda PSO wykazuje wiele podobieństw do algoryt-
mów genetycznych i ewolucyjnych, choć występują
metoda PSO nie posiada operatorów genetycz-
krzyżowanie i mutacja,
nie ma wymiany informacji
tak jak w algorytmach ewo-
w algorytmie PSO cała populacja jak jedna
się w kierunku punktu optymal-
w metodzie PSO tylko najlepsza cząstka jest
wykorzystywana podczas modyfikacji cech
wszystkich pozostałych, natomiast w przypad-
ku algorytmów ewolucyjnych nowe osobniki po-
siadają cechy osobnika najlepszego, jak również
hy osobników mniej przystosowanych,
cząstki posiadają swoją pa-
, co jest wykorzystywane w procesie aktu-
cykl życia cząstek jest taki, jak czas realizacji
Wśród podobieństw można wymienić:
przeszukiwanie przestrzeni
stanu bazuje na grupie osobników (algorytm
populacja, metoda PSO – rój)
początkowa jest generowana w
oba algorytmy są stochastyczne i nie ma jedno-
znacznego dowodu na ich zbieżność, ale prak-
tyka potwierdza ich skuteczność w znajdowania
, 24].
WYNIKI SYMULACJI
możliwiające formułowanie, rozwiązywanie
oraz symulację ruchu pojazdu osobo-
wego oraz procedury optymalizacji zostały zaimplemen-
programie komputerowym napisa-
ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU SAMOCHODU OSOBOWEGO
10
nym w języku C++. Rozważano przypadek, w którym
pojazd poruszający się z pewną prędkością początkową
wykonuje manewr jazdy po łuku. Przedmiotem badań
było wyznaczenie optymalnych momentów hamujących
zapewniających bezpieczeństwo pojazdu w czasie wyko-
nywania manewru. W symulacjach numerycznych
przyjęto, że manewr trwał 10 s, a po upływie 3 s współ-
czynnik przyczepności nawierzchni zmienia się z wartości
0,9 na 0,2. Przedstawiona sytuacja odpowiada przypad-
kowi, w którym pojazd wjeżdża z suchej drogi asfaltowej
na powierzchnię pokrytą śniegiem. W symulacjach
przyjęto, że samochód porusza się po drodze krajowej
klasy A, na której szerokość pojedynczego pasa ruchu,
zgodnie z rozporządzeniem Ministra Infrastruktury i
Rozwoju [1], wynosi 3,5 m. Założono prędkość począt-
kową pojazdu równą 50 km/h. Parametry fizyczne
pojazdu osobowego przyjęto z pracy [7]. W obliczeniach
założono, że liczba dyskretnych chwil czasowych, w
których wyznaczane są wartości momentów hamujących,
wynosi 21. Do całkowania równań ruchu w każdym
kroku procesu optymalizacji zastosowano stałokrokową
metodę Rungego-Kutty 6. rzędu [17]. Wartości minimal-
ne i maksymalne momentów hamujący stanowiących
ograniczenia nierównościowe dla przednich kół przyjęto: 13�E = 0�X� i 13`r = 1100�X� , natomiast odpo-
wiednie momenty graniczne tylnych kół pojazdu są
następujące: 13�E = 0�X� i 13`r = 1000�X� . Do
optymalizacji metodą PSO przyjęto parametry opisane
w tabeli 1.
Tabela 1 Parametry metody PSO używane podczas symulacji
Nazwa parametru Wartość
Liczba cząstek 30
Liczba iteracji 100
Współczynnik bezwładności 0,729
Współczynnik kognitywny 1,49445
Współczynnik społeczny 1,49445
Prawdopodobieństwo śmierci cząstki 0,01
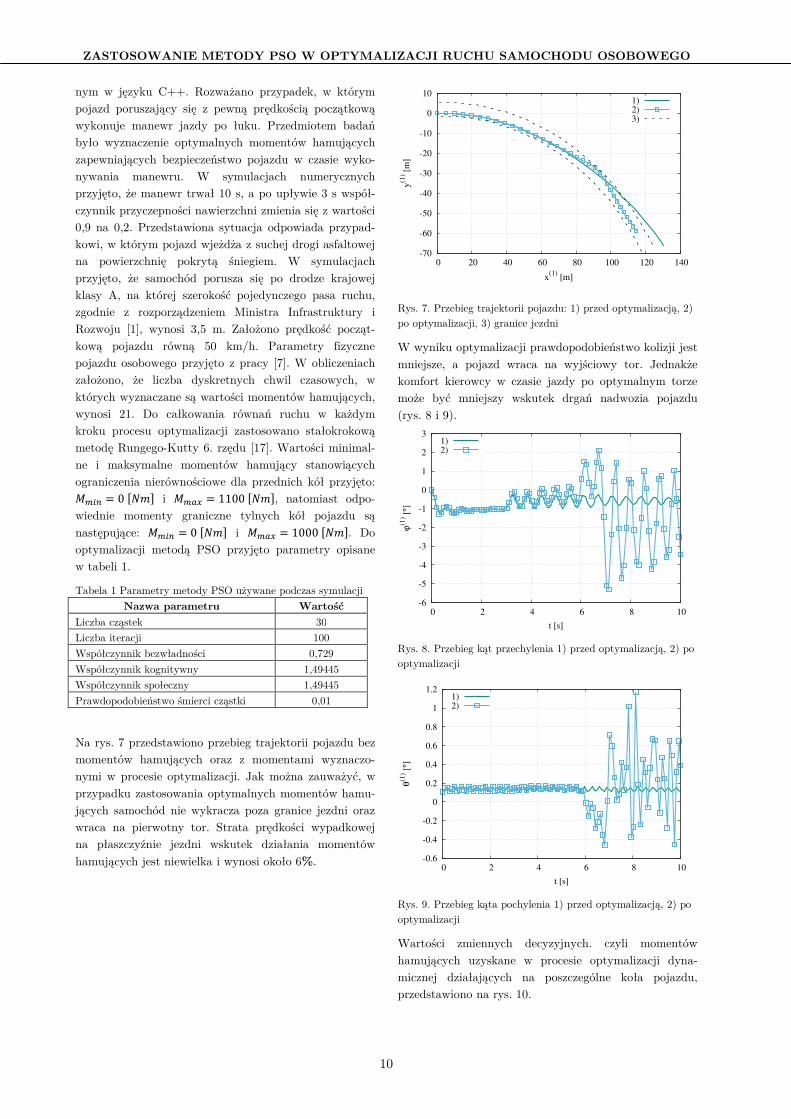
Na rys. 7 przedstawiono przebieg trajektorii pojazdu bez
momentów hamujących oraz z momentami wyznaczo-
nymi w procesie optymalizacji. Jak można zauważyć, w
przypadku zastosowania optymalnych momentów hamu-
jących samochód nie wykracza poza granice jezdni oraz
wraca na pierwotny tor. Strata prędkości wypadkowej
na płaszczyźnie jezdni wskutek działania momentów
hamujących jest niewielka i wynosi około 6%.
Rys. 7. Przebieg trajektorii pojazdu: 1) przed optymalizacją, 2)
po optymalizacji, 3) granice jezdni
W wyniku optymalizacji prawdopodobieństwo kolizji jest
mniejsze, a pojazd wraca na wyjściowy tor. Jednakże
komfort kierowcy w czasie jazdy po optymalnym torze
może być mniejszy wskutek drgań nadwozia pojazdu
(rys. 8 i 9).
Rys. 8. Przebieg kąt przechylenia 1) przed optymalizacją, 2) po
optymalizacji
Rys. 9. Przebieg kąta pochylenia 1) przed optymalizacją, 2) po
optymalizacji
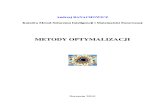
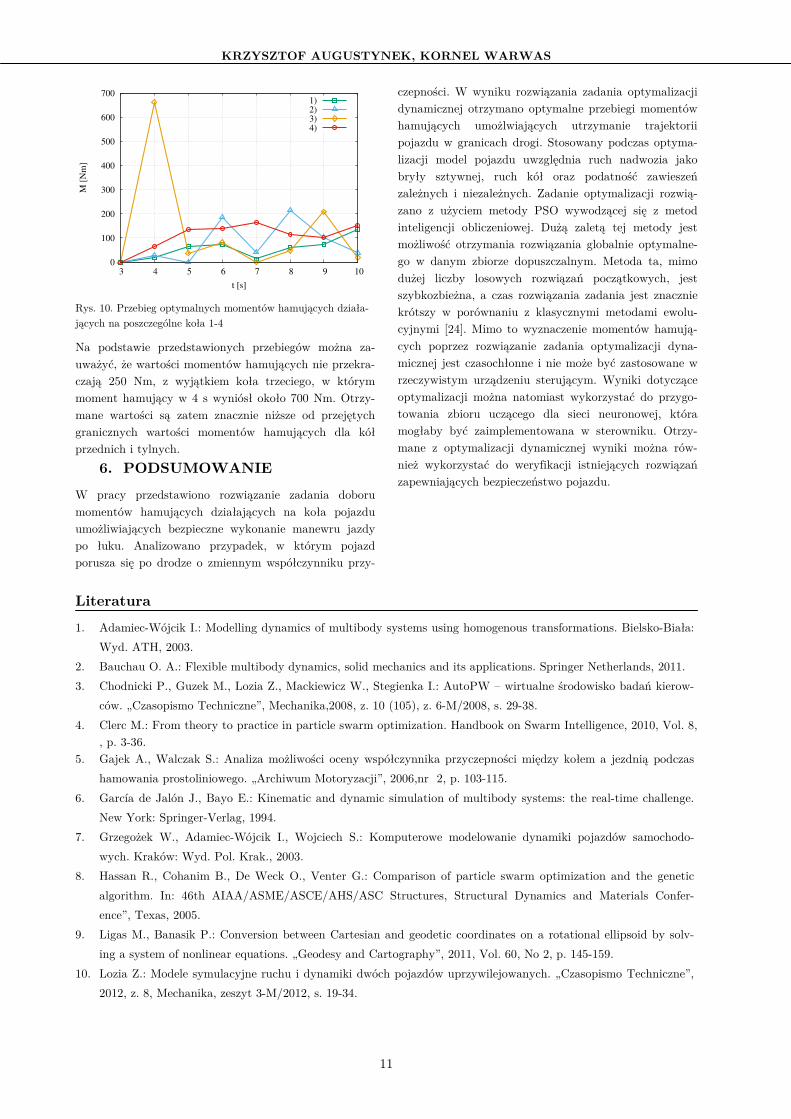
Wartości zmiennych decyzyjnych. czyli momentów
hamujących uzyskane w procesie optymalizacji dyna-
micznej działających na poszczególne koła pojazdu,
przedstawiono na rys. 10.
-70
-60
-50
-40
-30
-20
-10
0
10
0 20 40 60 80 100 120 140
y(1
) [m
]
x(1)
[m]
1)2)3)
-6
-5
-4
-3
-2
-1
0
1
2
3
0 2 4 6 8 10
ϕ(1
) [°]
t [s]
1)2)
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10
θ(1
) [°]
t [s]
1)2)
KRZYSZTOF AUGUSTYNEK, KORNEL WARWAS
11
Rys. 10. Przebieg optymalnych momentów hamujących działa-
jących na poszczególne koła 1-4
Na podstawie przedstawionych przebiegów można za-
uważyć, że wartości momentów hamujących nie przekra-
czają 250 Nm, z wyjątkiem koła trzeciego, w którym
moment hamujący w 4 s wyniósł około 700 Nm. Otrzy-
mane wartości są zatem znacznie niższe od przejętych
granicznych wartości momentów hamujących dla kół
przednich i tylnych.
6. PODSUMOWANIE
W pracy przedstawiono rozwiązanie zadania doboru
momentów hamujących działających na koła pojazdu
umożliwiających bezpieczne wykonanie manewru jazdy
po łuku. Analizowano przypadek, w którym pojazd
porusza się po drodze o zmiennym współczynniku przy-
czepności. W wyniku rozwiązania zadania optymalizacji
dynamicznej otrzymano optymalne przebiegi momentów
hamujących umożlwiających utrzymanie trajektorii
pojazdu w granicach drogi. Stosowany podczas optyma-
lizacji model pojazdu uwzględnia ruch nadwozia jako
bryły sztywnej, ruch kół oraz podatność zawieszeń
zależnych i niezależnych. Zadanie optymalizacji rozwią-
zano z użyciem metody PSO wywodzącej się z metod
inteligencji obliczeniowej. Dużą zaletą tej metody jest
możliwość otrzymania rozwiązania globalnie optymalne-
go w danym zbiorze dopuszczalnym. Metoda ta, mimo
dużej liczby losowych rozwiązań początkowych, jest
szybkozbieżna, a czas rozwiązania zadania jest znacznie
krótszy w porównaniu z klasycznymi metodami ewolu-
cyjnymi [24]. Mimo to wyznaczenie momentów hamują-
cych poprzez rozwiązanie zadania optymalizacji dyna-
micznej jest czasochłonne i nie może być zastosowane w
rzeczywistym urządzeniu sterującym. Wyniki dotyczące
optymalizacji można natomiast wykorzystać do przygo-
towania zbioru uczącego dla sieci neuronowej, która
mogłaby być zaimplementowana w sterowniku. Otrzy-
mane z optymalizacji dynamicznej wyniki można rów-
nież wykorzystać do weryfikacji istniejących rozwiązań
zapewniających bezpieczeństwo pojazdu.
Literatura
1. Adamiec-Wójcik I.: Modelling dynamics of multibody systems using homogenous transformations. Bielsko-Biała:
Wyd. ATH, 2003.
2. Bauchau O. A.: Flexible multibody dynamics, solid mechanics and its applications. Springer Netherlands, 2011.
3. Chodnicki P., Guzek M., Lozia Z., Mackiewicz W., Stegienka I.: AutoPW – wirtualne środowisko badań kierow-
ców. „Czasopismo Techniczne”, Mechanika,2008, z. 10 (105), z. 6-M/2008, s. 29-38.
4. Clerc M.: From theory to practice in particle swarm optimization. Handbook on Swarm Intelligence, 2010, Vol. 8,
, p. 3-36.
5. Gajek A., Walczak S.: Analiza możliwości oceny współczynnika przyczepności między kołem a jezdnią podczas
hamowania prostoliniowego. „Archiwum Motoryzacji”, 2006,nr 2, p. 103-115.
6. García de Jalón J., Bayo E.: Kinematic and dynamic simulation of multibody systems: the real-time challenge.
New York: Springer-Verlag, 1994.
7. Grzegożek W., Adamiec-Wójcik I., Wojciech S.: Komputerowe modelowanie dynamiki pojazdów samochodo-
wych. Kraków: Wyd. Pol. Krak., 2003.
8. Hassan R., Cohanim B., De Weck O., Venter G.: Comparison of particle swarm optimization and the genetic
algorithm. In: 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Confer-
ence”, Texas, 2005.
9. Ligas M., Banasik P.: Conversion between Cartesian and geodetic coordinates on a rotational ellipsoid by solv-
ing a system of nonlinear equations. „Geodesy and Cartography”, 2011, Vol. 60, No 2, p. 145-159.
10. Lozia Z.: Modele symulacyjne ruchu i dynamiki dwóch pojazdów uprzywilejowanych. „Czasopismo Techniczne”,
2012, z. 8, Mechanika, zeszyt 3-M/2012, s. 19-34.
0
100
200
300
400
500
600
700
3 4 5 6 7 8 9 10
M [
Nm
]
t [s]
1)2)3)4)

ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU SAMOCHODU OSOBOWEGO
11. Lozia Z.: Szacowanie wystąpienia zagrożenia wypadkiem w postaci przewrócenia się pojazdu kołowego na bok
„Autobusy: Technika, eksploatacja, systemy transportowe”
12. Lundahl K.: Modeling and optimization for
logy thesis, 2013, No. 1608.
13. Michalski R.: Modelowanie bezpieczeństwa pojazdów samochodowych
14. Parczewski K., Wnęk H.: Wykorzystanie przyczepności podczas hamowania pojazdu
ność : Maintenance and Reliability”, 2012, No. 2, Vol. 14, s. 176
15. Parsopoulos K., Vrahatis M.: Particle
Global, 2010.
16. Pedregal P.: Introduction to optimization
17. Press W., Teukolsky W., Vetterling S., Flannery W. B.: Numerical
Cambridge: Cambridge University Press, 2007.
18. Sahnehsaraei M., Mahmoodabadi M., Taherkhorsandi M., Castillo
algorithm: particle swarm optimization in association with a
Control Through Intelligent Soft Computations
19. Sivanandam S.N., Deepa S. N.: Introducti
20. Szczotka M., Tengler S., Wojciech S.: Numerical
tions of motion of a car. „Differential Equations and Nonlinear Mechanics
2007, Article ID 49157, 13 pp.
21. Szczotka M., Wojciech S.: Application of joint coordinates and homogeneous transformations to modeling of
vehicle dynamics. „Nonlinear Dynamics”
22. Szumska E., Młodzińska D., Jurecki R.: Wpływ stanu nawierzchni drogi na skuteczność hamowania pojazdu
„Logistyka” 2014, 6, s. 10430-10439.
23. Warwas K.: Analiza i sterowanie ruchem pojazdów wieloczłonowych z uwzgl
Praca doktorska. Bielsko-Biała: ATH,
24. Warwas K., Augustynek K.: Dynamic optimisation of articulated vehicle motion for control of stability in crit
cal situation. In: IDAACS 2015: 8th IEEE International Conference on Intelligent Data Acquisition and A
vanced Computing Systems: Technology and Applications
25. Wittbrodt E., Adamiec-Wójcik I., Wojciech S.: Dynamics of flexible multibody systems,
method. Springer 2006.
Ten artykuł dostępny jest na licencji Creative Commons
Pewne prawa zastrzeżone na rzecz autorów.
Treść licencji jest dostępna na stronie http://creativecommons.org/licenses/by/3.0/pl/
ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU SAMOCHODU OSOBOWEGO
12
Z.: Szacowanie wystąpienia zagrożenia wypadkiem w postaci przewrócenia się pojazdu kołowego na bok
Technika, eksploatacja, systemy transportowe” 2015, nr 6, s. 142-147.
ptimization for critical vehicle maneuvers. Linköping studies in science and techn
Michalski R.: Modelowanie bezpieczeństwa pojazdów samochodowych. „Logistyka”, 2010, 4,
: Wykorzystanie przyczepności podczas hamowania pojazdu. „Eksploatacja i
ność : Maintenance and Reliability”, 2012, No. 2, Vol. 14, s. 176-180.
Particle swarm optimization and intelligence: advances and
ptimization. Springer-Verlag Inc., 2004.
., Teukolsky W., Vetterling S., Flannery W. B.: Numerical recipes: the art of scientific
Cambridge University Press, 2007.
Sahnehsaraei M., Mahmoodabadi M., Taherkhorsandi M., Castillo K., Yazdi S.: A hybrid global optimization
algorithm: particle swarm optimization in association with a genetic algorithm. Complex System Modelling and
Control Through Intelligent Soft Computations. Springer, 2015, IX.863, p.45.
Sivanandam S.N., Deepa S. N.: Introduction to genetic algorithms. Berlin Heidelberg: Springer
Wojciech S.: Numerical effectiveness of models and methods of integration of the
Differential Equations and Nonlinear Mechanics”, Hindawi Publishing Corporation,
Szczotka M., Wojciech S.: Application of joint coordinates and homogeneous transformations to modeling of
„Nonlinear Dynamics” 2008, Vol. 52, Iss. 4, p. 377-393.
Młodzińska D., Jurecki R.: Wpływ stanu nawierzchni drogi na skuteczność hamowania pojazdu
10439.
Warwas K.: Analiza i sterowanie ruchem pojazdów wieloczłonowych z uwzględnieniem podatności elementów
Biała: ATH, 2009.
Warwas K., Augustynek K.: Dynamic optimisation of articulated vehicle motion for control of stability in crit
DAACS 2015: 8th IEEE International Conference on Intelligent Data Acquisition and A
: Technology and Applications 2015, Vol. 1, p. 232-237.
Wójcik I., Wojciech S.: Dynamics of flexible multibody systems, rigid finite element
Ten artykuł dostępny jest na licencji Creative Commons Uznanie autorstwa 3.0 Polska.
Pewne prawa zastrzeżone na rzecz autorów.
Treść licencji jest dostępna na stronie http://creativecommons.org/licenses/by/3.0/pl/
ZASTOSOWANIE METODY PSO W OPTYMALIZACJI RUCHU SAMOCHODU OSOBOWEGO
Z.: Szacowanie wystąpienia zagrożenia wypadkiem w postaci przewrócenia się pojazdu kołowego na bok.
öping studies in science and techno-
„Logistyka”, 2010, 4, [CD].
„Eksploatacja i Niezawod-
dvances and applications, IGI
cientific computing.3rd ed.
A hybrid global optimization
Complex System Modelling and
: Springer-Verlag, 2008.
ntegration of the equa-
Hindawi Publishing Corporation,
Szczotka M., Wojciech S.: Application of joint coordinates and homogeneous transformations to modeling of
Młodzińska D., Jurecki R.: Wpływ stanu nawierzchni drogi na skuteczność hamowania pojazdu.
ędnieniem podatności elementów.
Warwas K., Augustynek K.: Dynamic optimisation of articulated vehicle motion for control of stability in criti-
DAACS 2015: 8th IEEE International Conference on Intelligent Data Acquisition and Ad-
igid finite element
Uznanie autorstwa 3.0 Polska.
Treść licencji jest dostępna na stronie http://creativecommons.org/licenses/by/3.0/pl/