Wyznaczanie parametrów pozasłonecznych układów planetarnych
71
Uniwersytet Zielonogórski Wydzial Fizyki i Astronomii Szymon Kozlowski Wyznaczanie parametrów pozaslonecznych ukladów planetarnych Akceptacja promotora: Praca magisterska napisana pod kierunkiem: dra hab. Andrzeja J. Maciejewskiego, prof. UZ Zielona Góra 2004 r.
Transcript of Wyznaczanie parametrów pozasłonecznych układów planetarnych

Uniwersytet Zielonogórski
Wydział Fizyki i Astronomii
Szymon Kozłowski
Wyznaczanie parametrówpozasłonecznych układów
planetarnych
Akceptacja promotora: Praca magisterska napisanapod kierunkiem:
dra hab.Andrzeja J. Maciejewskiego,
prof. UZ
Zielona Góra 2004 r.

Spis treści
1 Wstęp 3
2 Układy planetarne 5
2.1 Odkrycie planet wokół innych gwiazd . . . . . . . . . . . . . . 62.2 Metody detekcji planet . . . . . . . . . . . . . . . . . . . . . . 62.2.1 Planety wokół pulsarów . . . . . . . . . . . . . . . . . 72.2.2 Pomiary prędkości radialnych gwiazd . . . . . . . . . . 82.2.3 Astrometria . . . . . . . . . . . . . . . . . . . . . . . . 112.2.4 Mikrosoczewkowanie grawitacyjne . . . . . . . . . . . . 122.2.5 Przejścia planet przed tarczą gwiazdy . . . . . . . . . . 15
3 Matematyczny model układu planetarnego 17
3.1 Równania ruchu . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.1 Funkcja Lagrange’a i Hamiltonian w kartezjańskim in-
ercjalnym układzie odniesienia . . . . . . . . . . . . . . 183.1.2 Barycentryczny układ odniesienia . . . . . . . . . . . . 193.1.3 Współrzędne względne . . . . . . . . . . . . . . . . . . 20
3.2 Współrzędne Jacobiego, równania ruchu . . . . . . . . . . . . 233.3 Model keplerowski . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Charakterystyka wybranych układów dwuplanetarnych 30
4.1 Hipotetyczny układ dwuplanetarny . . . . . . . . . . . . . . . 304.2 Układ planetarny gwiazdy HD 160691 . . . . . . . . . . . . . 304.3 Układ planetarny gwiazdy HD 12661 . . . . . . . . . . . . . . 31
5 Metody wyznaczania parametrów układów planetarnych 33
5.1 Metody gradientowe . . . . . . . . . . . . . . . . . . . . . . . 335.2 Metody bezgradientowe . . . . . . . . . . . . . . . . . . . . . . 345.3 Dopasowanie keplerowkie . . . . . . . . . . . . . . . . . . . . . 345.4 Dopasowanie pełnych równań ruchu dla N-ciał . . . . . . . . . 35
1

6 Problem i wyniki 36
6.1 Przedstawienie problemu . . . . . . . . . . . . . . . . . . . . . 366.2 Metoda badań . . . . . . . . . . . . . . . . . . . . . . . . . . . 376.3 Interpretacja wyników . . . . . . . . . . . . . . . . . . . . . . 376.3.1 Symulacja 1 . . . . . . . . . . . . . . . . . . . . . . . . 386.3.2 Symulacja 2 . . . . . . . . . . . . . . . . . . . . . . . . 386.3.3 Symulacja 3 . . . . . . . . . . . . . . . . . . . . . . . . 396.3.4 Symulacja 4 . . . . . . . . . . . . . . . . . . . . . . . . 396.3.5 Symulacja 5 . . . . . . . . . . . . . . . . . . . . . . . . 406.3.6 Symulacja 6 . . . . . . . . . . . . . . . . . . . . . . . . 40
6.4 Graficzna prezentacja wyników . . . . . . . . . . . . . . . . . 40
2

Rozdział 1
Wstęp
Czy jesteśmy sami we Wszechświecie? — to jedno z najważniejszych pytańludzkości. Odpowiedź na nie możemy uzyskać głównie poprzez poszukiwaniaplanet krążących wokół innych gwiazd. Planety pozasłoneczne i możliwośćewentualnego życia na nich to obecnie jednen z najgorętszych tematów wastronomii. Wielu astronomów „poluje” na planety, a jeszcze większa ichrzesza analizuje dane obserwacyjne. Na świecie budowanych jest wiele urzą-dzeń obserwacyjnych dedykowanych poszukiwaniom planet pozasłonecznych,a w przyszłości planowane jest wysłanie na orbitę ziemską specjalnych tele-skopów o niespotykanych dotąd możliwościach. Fachowa literatura światowa,jak również najzwyklejsze czasopisma często informują nas o kolejnych do-konaniach astronomów w tej dziedzinie.
Obserwatorzy w pracach naukowych zazwyczaj nie udostępniają bez-pośrednich rezultatów swoich obserwacji, np. pomiarów prędkości radialnychgwiazd. Częściej w pracach tych znaleźć możemy parametry z dopasowaniajakiegoś modelu do danych obserwacyjnych. Jednym z najczęściej dopasowy-wanych modeli jest model keplerowski, który nie do końca nadaje się do tegocelu. Nie uwzględnia on zmiany elementów orbity pod wpływem oddziały-wania grawitacyjnego pomiędzy planetami. Pojawia się więc pytanie, na iledokładnie elementy keplerowskie opisują stan układu planetarnego? Wieluautorów prac naukowych wysunęło argumenty, że elementy keplerowskie zdopasowania keplerowskiego należy interpretować jako elementy Jacobiego.Postanowiłem sprawdzić na ile te argumenty są prawdziwe.
Praca magisterska składa się z następujących części: Rozdział pierw-szy to wstęp do niniejszej pracy. W rozdziale drugim opisałem po krótce hi-storię odkrycia pozasłonecznych układów planetarnych oraz metody detekcjiplanet. Spośród około trzydziestu opracowanych metod wykrywania planetpozasłonecznych opisałem metody, przy pomocy których wykryto do tej pory
3

chociaż jedną planetę. Szczególny nacisk położyłem na metody przynoszącerezultaty w postaci kilku, czy nawet kilkudziesięciu odkrytych planet, tj. me-toda pomiarów prędkości radialnych gwiazd, przejścia planety przed tarczągwiazdy oraz mikrosoczewkowanie grawitacyjne. Rozdział trzeci zawiera opisaparatu matematycznego wykorzystywanego przeze mnie w moich symula-cjach i dopasowaniach. Znajdziemy tam m. in. równania ruchu zapisane wróżnych układach współrzędnych oraz same charakterystyki następującychukładów współrzędnych: barycentrycznego, względnego i Jacobiego. Dla po-rządku przedstawiony został też dobrze znany model keplerowski. W roz-dziale czwartym znajdziemy informacje na temat analizowanych przeze mnieukładów planetarnych. Rozdział piąty to zbiór metod dopasowywania mo-deli do danych obserwacyjnych. Znajdziemy tam opis metod gradientowychoraz bezgradientowych. Rodział szósty zawiera opis postawionego problemu,procedurę przeprowadzonych badań oraz wyniki i wnioski dotyczące posta-wionego problemu uzupełnione o wiele graficznych wykresów.
4

Rozdział 2
Układy planetarne
Jedną z najszybciej rozwijających się obecnie dziedzin astronomii jest me-chanika nieba. Do 1992 roku stosowana głównie do analizy ruchu ciał poru-szających się w naszym Układzie Słonecznym, teraz przeżywa swoją drugąmłodość. A wszystko za sprawą odkrycia pierwszego pozasłonecznego ukła-du planetarnego wokół innej gwiazdy niż Słońce. Odkrycie dokonane zupeł-nie nieoczekiwanie przez Wolszczana i Fraila [11] zapoczątkowało lawinowywzrost odkrywanych planet wokół pobliskich gwiazd i wzbudziło ogromnezainteresowanie tematem nie tylko wsród astronomów, czy astrofizyków, lecztakże wśród zwykłych ludzi.
Chęć poznania swojego miejsca we Wszechświecie skłaniała już staro-żytnych ku obserwacjom ciał niebieskich. W czwartym wieku przed naszą erąEpikur (341 – 270 rok p. n. e.) głosił pogląd, że „we Wszechświecie istniejenieskończona liczba światów podobnych, jak i niepodobnych do naszego”. W1600 roku naszej ery za głoszenie idei powszechności życia we Wszechświeciena stosie spłonął Giordano Bruno (1548 – 1600 rok). Po wynalezieniu lunetyprzez Galileusza w 1609 roku pierwsze naukowe próby detekcji planet poza-słonecznych podejmował Huygens w 1698 roku. Niestety sprzęt obserwacyjnyużywany w tamtych czasach nie pozwalał zarówno na zmierzenie spadku ja-sności gwiazdy podczas przejścia planety przed jej tarczą, jak i tym bardziejna pomiar takich subtelnych własności jak prędkość radialna.
Wraz z rozwojem nauki, postępuje rozwój techniki, a to z kolei umożli-wia postęp w nauce. Dzięki coraz to większym teleskopom i coraz to czulszymdetektorom, możliwe stało się wykrywanie efektów powodowanych przez pla-nety pozasłoneczne. Do dnia dzisiejszego (sierpień 2004) odkryto ponad 120takich obiektów. Baza danych statystycznych stała się na tyle duża, że moż-na zacząć wyciągać wnioski. Pierwsze co rzuciło się astronomom w oczy, a
5

jednocześnie co każe nam zmienić naszą teorię powstawania układów plane-tarnych to to, że wokół innych gwiazd planety typu jowiszowgo krążą bardzoblisko swoich słońc obiegając je zaledwie w kilkanaście dni. Jest to w znacznejmierze efekt obserwacyjny, to znaczy potrafimy wykrywać głównie tylko dużeplanety typu jowiszowego. Niemniej ciekawym jest fakt, że tak duże planetykrążą bardzo blisko swoich gwiazd. Teoria powstawania naszego własnegoUkładu Słonecznego, musi zostać poważnie zrewidowana. Na dzień dzisiejszynie jesteśmy w stanie wykrywać planet wielkości Ziemi (wyjątek: chronome-traż pulsarów). Stanie się to możliwe za kilka, kilkanaście lat gdy w kosmoszostaną wysłane sondy przeznaczone właśnie do wykrywania „małych” pla-net. W tym momencie możemy jedynie badać stabilność hipotetycznych ziemw znanych nam układach planetarnych.
2.1 Odkrycie planet wokół innych gwiazd
Odkrycie pierwszych pozasłonecznych układów planetarnych ogłaszano wie-lokrotnie. Niestety za każdym razem okazywało się, że astronomowie nie wzię-li czegoś pod uwagę i w skrajnym przypadku, odkrywali planetę o obiegu365,25 dnia czyli naszą Ziemię! Pierwsze planety pozasłoneczne zostały od-kryte wokół pulsara PSR1257+12 w 1992 roku przez Wolszczana i Fraila [10][11]. Odkrycie pierwszej planety wokół gwiazdy ciągu głównego 51 Peg miałomiejsce w 1995 roku (Mayor i Queloz) [7].
2.2 Metody detekcji planet
Pierwsze próby wykrycia planet pozasłonecznych zostały podjęte w latachtrzydziestych XX wieku. Zakończyły się one niepowodzeniem głównie zewzględu na niewystarczające ówczesne możliwości sprzętowe. Na początkulat dziewięćdziesiątych XX wieku teleskopy, jak i same metody używane przezastronomów stały się na tyle czułe, że zaowocowało to odkryciem pierwszychplanet pozasłonecznych. Do dnia dzisiejszego opracowano około trzydzieścimetod ich wykrywania. Ciekawym jest fakt, że obserwacje planet pozasło-necznych są już nawet w zasięgu amatorów. Przy użyciu teleskopu o średnicy10 cm i detektora CCD wraz z kompletem filtrów można obserwować spa-dek jasności gwiazdy HD 209458 spowodowany przysłonięciem części tarczygwiazdy przez planetę (1,7 procenta), co odpowiada zmianie jasności gwiazdyo około 0,02 wielkości gwiazdowej [1], [5].
6

2.2.1 Planety wokół pulsarów
Znamy dwa układy planetarne wokół pulsarów. Jak już wspomniałem pierw-szy z nich odkryty został w 1992 roku przez Wolszczana i Fraila [10] [11] ijest to układ trzech planet o masach: 0,02, 4,3, 3,9 M⊕· sin i. Drugi z ukła-dów wokół pulsara PSRB1620-26 posiada jedną planetę o masie 2,5 MJ· sin i.Metoda wykrywania planet wokół pulsarów polega na bardzo dokładnym po-miarze przychodzących sygnałów. Jest to tak zwany chronometraż pulsarów.Pulsar jest gwiazdą emitującą promieniowanie radiowe w wąską wiązkę, któ-ra omiata obserwatora w równych odstępach czasu. Warunek jednakowychodstępów czasu w przyjściach sygnału spełniony jest wtedy, gdy pulsar nieznajduje się w żadnym układzie podwójnym, czy wielokrotnym oraz nie mażadnych przypadkowych efektów w jego wnętrzu, np. glitch. Jeśli jednak pul-sar znajduje się w układzie podwójnym (bądź wielokrotnym) lub posiadaplanety, porusza się on wtedy po orbicie wokół barycentrum, co z kolei po-woduje opóźnienia lub przyspieszenia przyjścia sygnałów. Różnice przyjściasygnałów opisujemy wzorem [6]
∆t =N∑
j=1
xj
(
1− e2j1− ej cos νj
sin(νj + ωj)
)
(2.1)
gdzie xj = aj sin ij/c, a aj to półosie wielkie orbit, ej — mimośrody, ij— nachylenia, νj — anomalie prawdziwe, ωj argumenty perycentrów; są toparametry orbit planet. Aby lepiej zobrazować zagadnienie, opiszemy ruchpulsara w barycentrycznym układzie odniesienia. W tym układzie oś z skie-rowana jest od obserwatora do barycentrum, a płaszczyzna (xy) styczna jestdo sfery niebieskiej. Mamy zatem
∆t = −1cr0 · z, r0 = −
1m0
N∑
i=1
miri, (2.2)
gdzie z jest wektorem jednostkowym skierowanym w kierunku osi z, a wekto-ry ri są barycentrycznymi położeniami planet. Przy tych założeniach mamy
mjm0aj sin ij = xjc,
Gm0(
1 + mjm0
)2 = n2ja3j . (2.3)
Znając wszystkie parametry orbit planet możemy łatwo zinterpretować ruchpulsara jako superpozycję ruchów po elipsach jego planet wokół barycentrum.
7

2.2.2 Pomiary prędkości radialnych gwiazd
Najbardziej efektywną obecnie metodą poszukiwania planet pozasłonecznychjest metoda pomiarów prędkości radialnych gwiazd. Metoda ta polega na po-miarze dopplerowskich przesunięć linii widmowych spowodowanych ruchemgwiazdy wokół wspólnego środka masy gwiazdy i planety (lub większej ilościciał).
W obserwacjach bezpośrednich nie możemy zaobserwować planet pozasło-necznych. Spowodowane to jest, po pierwsze bardzo dużą odległością dogwiazd, wokół których mogą krążyć planety, po drugie planety jako ciałanie świecące własnym światłem, odbijają w najlepszym przypadku tyle świa-tła, że świecą 109 razy słabiej niż ich gwiazda. Oznacza to tyle, że widzianebyłyby jako obiekty o około 23 wielkości gwiazdowe słabsze niż jasność gwiaz-dy. Jeżeli wybierzemy za cel naszych poszukiwań gwiazdę o jasności 8m toplaneta okrążająca tę gwiazdę świeciłaby jako punkt o jasności 31m. Zasięgnajwiększych teleskopów jest na poziomie 28m - 29m. Skoro nie jesteśmy wstanie zaobserwować bezpośrednio planet możemy posłużyć się spektrosko-pią. Światło dowolnego emitującego obiektu po przepuszczeniu przez spek-troskop ulega rozszczepieniu na całą gamę barw - widmo. Okazuje się, że wtakim widmie widać ciemne (absorpcyjne) i jasne (emisyjne) prążki widmo-we. Każdy z takich prążków odpowiada pewnemu pierwiastkowi lub związ-kowi chemicznemu. Podgrzewając w laboratorium np. wodór i przepuszcza-jąc jego swiatło przez spektroskop otrzymamy kilka charakterystycznych dlaniego linii widmowych. Poprzez porównanie laboratoryjnych widm różnychpierwastków i związków chemicznych z widmem gwiazdy możemy dokładnieokreślić jej skład chemiczny, typ widmowy, temperaturę i masę. W ogólnościznamy dokładne położenie każdego prążka w widmie (rysunek 2.1).
Planety w naszym Układzie Słonecznym, jak i w innych układach pozasło-necznych krążą wokół swoich gwiazd (dokładniej wokół barycentrum). Z rów-nań
M?r? +Mprp = 0 (2.4)
oraz
M?v? +Mpvp = 0, (2.5)
gdzie r? to promień wodzący gwiazdy, rp to promień wodzący planety, v? toprędkość gwiazdy, a vp jest prędkością planety, widać, że zarówno gwiazdajak i planeta obiegają barycentrum. Wiemy zatem, że gwiazda porusza sięw przestrzeni. Poza ruchem obiegowym gwiazda może posiadać (i zazwyczaj
8

Rysunek 2.1: Przykładowe widma gwiazd: Betelgeuze, Aldebaran, Syriusz
posiada) ruch własny. Okazuje się, że każdy ruch gwiazdy znajduje swojeodzwierciedlenie w jej widme. Efekt Dopplera mówi nam o tym, że długośćfali świetlnej ciała zbliżającego się do nas maleje, a oddalającego się rośnie.Jeżeli λo oznacza długość danej fali obserwowanej, a λe długość laboratoryjnątej fali, to z poniższego wzoru możemy wyznaczyć prędkość vr obiektu
vr ≈(λo − λe)cλe
, ∀ vr c. (2.6)
Jeżeli rozważanym obiektem jest gwiazda, to prędkość vr nazywamy prędko-ścią radialną gwiazdy. Przymiotnik „radialna” został tutaj użyty ponieważefekt Dopplera zachodzi tylko i wyłącznie wtedy, gdy gwiazda zbliża się donas lub oddala. Nie oznacza to wcale, że ruch gwiazdy ma przypominać oscy-lator harmoniczny w dodatku skierowany dokładnie w kierunku osi widze-nia. Gwiazda krążąc wokół barycentrum posiada pewną prędkość. Rzutująctę prędkość na kierunek widzenia otrzymujemy prędkość radialną. Tylko iwyłącznie składowa radialna prędkości jest odpowiedzialna za obserwowanyprzez nas efekt Dopplera. Ruch prostopadły gwiazdy do kierunku widzenianie wnosi przyczynku do obserwowanego efektu Dopplera. Jak więc widzimynachylenie układu planetarnego do kierunku widzenia ma swoje znaczenie.Jeżeli kierunek widzenia jest zgodny z kierunkiem osi z, to kąt pomiędzytymże kierunkiem, a prostą prostopadłą do płaszczyzny układu planetarnegonazywamy nachyleniem orbity i oznaczamy jako i. Wartość prędkości radial-nej jest więc iloczynem prędkości gwiazdy i sinusa kąta i
vr = v · sin i. (2.7)
9

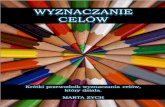
0 20 40 60 80time [years]
-20
-10
0
10
20
radi
al v
eloc
ity [m
/s]
Solar System
M1 = 1.000 MJsinM2 = 0.299 MJsin
a1 = 5.2 AUa2 = 9.5 AUe1 = 0.048e2 = 0.056
ii
Rysunek 2.2: Wymodelowana prędkość radialna Słońca.
W najprostszym przypadku gdy rozważamy układ składający się z gwiazdyi jednej planety, przy czym orbita jest kołowa, a kąt nachylenia orbity jestrówny i = 90 to prędkość radialna będzie opisana sinusoidą o amplitudzieK i okresie P . Okres obiegu planety w tym przypadku wyznaczany jest z IIIPrawa Keplera
P =(
a
1AU
) 32
(
M∗M
)− 12
lat. (2.8)
Amplitudę K wyliczamy ze wzoru
K = 28.4(
P
1 rok
)− 13(
Mp sin iMJ
)
(
M∗M
)− 23
m/s, (2.9)
w ogolności zaś dana jest ona wzorem
K =(2πGP
)
13 Mp sin i
(Mp +M∗)23
1
(1− e2)12
. (2.10)
Obserwując nasze Słońce w pewnych odstępach czasu z odległości kilku par-seków zaobserwowalibyśmy zmiany predkości radialnej o amplitudzie K ≈ 12m/s z okresem P = 11, 86 roku spowodowanej obecnością Jowisza orazK ≈ 9m/s z okresem P = 28, 34 roku spowodowanej obecnością Saturna (rysunek
10

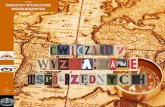
1000 1500 2000 2500time [days]
-60
-40
-20
0
20
40
60
radi
al v
eloc
ity [m
/s]
RMS = 3.79 m/sχ2
red = 1.32
HD 160691
M1 = 2.86 MJsinM2 = 2.28 MJsin
a1 = 6.9 AUa2 = 2.4 AUe1 = 0.86e2 = 0.52
ii
Rysunek 2.3: Prędkość radialna gwiazdy HD 160691.
2.2). Najlepsza osiągana dotychczas dokładność pomiaru prędkości radialnejgwiazdy jest na poziomie 3 m/s, natomiast średnio dokładność ta oscylujewokół wartości 7 m/s. Jeżeli na planecie okrążającej pobliską gwiazdę żyjąistoty rozumne o zbliżonym do nas stopniu rozwoju techniki nie zaobserwowa-łyby nas. Ziemia wnosi swój wkład do prędkości radialnej Słońca w postacioscylacji o amplitudzie K ≈ 0, 15 m/s i okresie oczywiście jednego roku.Istoty rozumne z tamtego układu planetarnego sklasyfikowałyby nasz układjako dwuplanetarny, bo właśnie na tyle pozwala dokładność ich pomiarów.Znaleźliby dwie największe planety Jowisza i Saturna.
2.2.3 Astrometria
W podrozdziałach 2.2.2 i 3.1.2 omówiony został ruch ciał wokół barycentrum.Oczywiście barycentrum jest fikcyjnym - matematycznym punktem, które-go bezpośrednio nie obserwujemy. Jedyne co możemy zaobserować, to ruchgwiazdy wokół poruszającego lub nie poruszającego się barycentrum. Istot-nym jest aby był spełniony jeszcze jeden warunek. Gwiazda musi znajdowaćsię stosunkowo blisko nas oraz masa planety musi być wystarczająco dużaaby odległość gwiazdy od barycentrum była maksymalnie duża. Odległośćkątową gwiazdy od barycentrum na sferze niebieskiej opisujemy następują-cym wzorem
11

α =MpM?
1− MpM?
a
d, (2.11)
gdzie a =| r | to odległość planety od gwiazdy w jednostkach astronomicz-nych [AU], zaś d to odległość barycentrum od Ziemi w parsekach [pc]. Ry-sunek 2.4 przedstawia wymodelowaną krzywą astrometryczną dla gwiazdy oruchu własnym 40 mas/rok zrzutowaną na sferę niebieską. Masa planety toMp = 10 MJ, masa gwiazdy M? = 1.0 M, odległość d = 40 pc oraz a = 0.5AU.
0 20 40 60 80 100 120 140 160rektascensja [mas]
0
20
40
60
80
dekl
inac
ja [m
as]
Rysunek 2.4: Położenie gwiazdy na niebie (linia ciągła) oraz tor ruchu bary-centrum w przestrzeni (linia przerywana) zrzutowany na płaszczyznę nieba.
2.2.4 Mikrosoczewkowanie grawitacyjne
Ogólna teoria względności Einsteina mówi nam jak masa wpływa na za-krzywienie czasoprzestrzeni [8]. W przestrzeni euklidesowej najkrótszą drogąpomiędzy dwoma punktami dla światła jest linia prosta. Okazuje się, że w
12

pobliżu bardzo masywnych obiektów przestrzeń jest zakrzywiona. W takiejprzestrzeni najkrótszą drogą dla światła jest linia krzywa. Bez zagłębianiasię w rachunek tensorowy można powiedzieć, że gdy światło napotyka nazakrzywioną przestrzeń wokół masywnego ciała tor jego ruchu zmienia sięo pewnien kąt α. Kąt ten zależy wprost proporcjonalnie od masy ciała, aodwrotnie proporcjonalnie od odległości do tego ciała
α =4GMRc2. (2.12)
Rysunek 2.5: Schemat działania soczewki grawitacyjnej.
Rozpatrzmy sytuację przedstawioną na rysunku 2.5. Po lewej stronie znajdujesię obserwator O, w środku masa soczewkująca M, a po prawej stronie źródłoS i obraz źródła I. Masa soczewkująca znajduje się w odległości Dd, a źródłow odległości Ds od obserwatora. Światło emitowane ze źródła S poruszasię w kierunku A, gdzie w pobliżu masy soczewkującej M zmienia kierunekpropagacji o kąt α i zmierza w kierunku obserwatora. Na sferze niebieskiejźródło S widziane jest pod kątem Rs/Dd, a obraz pod kątem R/Dd od M.Z rysunku 2.5 widać także to, że odległość R + Rs jest proporcjonalna doodległości źródło – obraz, co możemy zapisać w postaci
R +Rs = α(Ds −Dd)DdDs=4GMRc2(Ds −Dd)DdDs
. (2.13)
Powyższe równanie możemy zapisać jako
R2 +RsR−R2E = 0, (2.14)
gdzie R2E = 2RgD oraz D = (Ds − Dd)Dd/Ds. Równanie (2.14) ma dwarozwiązania, co odpowiada dwóm obrazom źródła S. Obrazy te znajdują siępo przeciwnych stronach (rysunek 2.6) punktu M w odległości
13

Rysunek 2.6: Schemat soczewki grawitacyjnej – widok na płaszczyznę nieba.Przerywana linia obrazuje pierścien Einsteina, I1 i I2 to obrazy źrodła S, aM to masywne ciało zakrzywiające przestrzeń.
R± =12
[
Rs ±(
R2s + 4R2E
) 12
]
, (2.15)
co odpowiada odległościom kątowym R+/Dd i R−/Dd. Soczewkowanie gra-witacyjne zachowuje jasność powierzchniową. Stusunek jasności obrazu doźródła określa stosunek ich pól
A± =
∣
∣
∣
∣
∣
R±Rs
dR±dRs
∣
∣
∣
∣
∣
=u2 + 2
2u (u2 + 4)12
± 12, (2.16)
gdzie u = Rs/RE. Całkowity wzrost jasności określa wzór
A = A+ + A− =u2 + 2
u (u2 + 4)12
. (2.17)
Wiemy, że wszystkie ciała we Wszechświecie poruszają się, więc konfiguracjaz rysunków 2.5 i 2.6 trwa określony czas t0
t0 =REV, (2.18)
gdzie V jest prędkościa tangencjalną masy soczewkującej M w odniesieniudo źródła S.
14

Rysunek 2.7: Przebieg zmian jasności gwiady posiadającej planety podczasmikrosoczewkowania grawitacyjnego.
Jeżeli gwiazda posiadająca planety jest soczewkowana grawitacyjnie,to w krzywej blasku uwidocznią się niewielkie zmiany (lokalne maksima iminima), co widać na rysunku 2.7 [4].
2.2.5 Przejścia planet przed tarczą gwiazdy
Istnieje małe, aczkolwiek niezerowe prawdopodobieństwo, że układ plane-tarny nachylony jest do obserwatora pod kątem bliskim i = 90o. W takimprzypadku zajdzie następująca możliwość: tarcza planety zasłaniać będzieczęść docierającego do obserwatora światła gwiazdy, co odnotowane będziejako spadek jasności gwiazdy.Spadek ilości docierającego do detektora światła prosto zależy od kwadra-tu stosunku promienia planety do promienia gwiazdy. Dla układu Jowisz -Słońce spadek ten wynosić będzie około 1%, natomiast dla układu Ziemia -Słońce będzie to niecałe 0,01%. Można to wyrazić prostym wzorem
15

3 4 5 6 7 8Time (UT)
0.97
0.98
0.99
1.00
1.01
1.02
Rel
ativ
e Fl
ux
Rysunek 2.8: Spadek jasności gwiazdy HD 209458 spowodowany przejściemplanety pomiędzy obserwatorem i gwiazdą. Pomiary wykonane zostały wFremont, California w nocy z 19/20 października 2001 roku [9].
S =(
RpR?
)2
· 100%, (2.19)
gdzie S to spadek jasności gwiazdy, Rp to promień planety, a R? to promieńgwiazdy.
Z definicji metody pomiarów prędkości radialnych wiemy, że danyukład planetarny musi być nachylony do osi widzenia pod kątem różnym odzera. W ponad 120 układach planetarnych odkrytych do tej pory tą metodą,może się zdarzyć, że nachylenie układu planetarnego jest bliskie i = 90o. Oka-zuje się, że w grupie planet o okresach P < 10 dni (siedemnaście planet) ilośćspodziewanych przejść planety przed tarczą gwiazdy wynosi < n >= 1, 75.Rzeczywiście w tej grupie znajduje się planeta, okrążająca i zarazem zasła-niająca co 3,52 dnia gwiazdę HD 209458 (rysunek 2.8). Dla planet o okresach10 dni < P < 200 dni spodziewana ilość przejść wynosi < n >= 0, 72. Dotej pory prawie żadna gwiazda z tej grupy nie była monitorowana w celusprawdzenia, czy rzeczywiście zachodzi przejście.
16

Rozdział 3
Matematyczny model układu
planetarnego
Praktycznie zawsze, gdy opisujemy ruch planet w układzie planetarnym, za-niedbujemy ich kształt — traktowane są one jako punkty materialne. Dlategoteż, matematycznym modelem układu planetarnego składającego się z gwiaz-dy i N planet jest klasyczne (bądź relatywistyczne) zagadnienie N + 1 ciał.
3.1 Równania ruchu
Rozpatrzmy układ składający się z N + 1 punktów materialnych o masachmi, i = 0, . . . , N . Zakładamy, że punkty te oddziaływują pomiędzy sobązgodnie z prawem powszechnego ciążenia. Równania ruchu Newtona zapisanew dowolnym inercjalnym układzie współrzędnych mają następującą postać
miri = −GN∑′
j=0
mimjr3ij(ri − rj), i = 0, . . . , N, (3.1)
gdzie G jest stałą grawitacyjną, oraz
rij = ri − rj, rij = ‖rij‖, i, j = 0, . . . , N.
We wzorze (3.1) znak∑′ oznacza, że sumowanie odbywa się po j 6= i.
Równania (3.1) posiadają siedem klasycznych całek pierwszych: cał-kowity pęd, całkowity moment pędu oraz energia całkowita. Określone są onew sposób następujący
P =N∑
i=0
miri, C =N∑
i=0
ri ×miri, E = T + V, (3.2)
17

gdzie T oznacza energię kinetyczną, a V energię potencjalną układu, to zna-czy
T =12
N∑
i=0
mi‖ri‖2, V = −G∑
0¬i<j¬N
mimjrij.
Środek masy układu zdefiniowany jest następująco
R =1m
N∑
i=0
miri, gdzie m =N∑
i=0
mi, (3.3)
i nazywany jest także barycentrum.Równania (3.1) zapisane są w niezmienniczej wektorowej postaci. Mają
one taką samą formę w dowolnym inercjalnym układzie odniesienia.
3.1.1 Funkcja Lagrange’a i Hamiltonian w kartezjań-
skim inercjalnym układzie odniesienia
Przyjmijmy za współrzędne uogólnione składowe kartezjańskie wektorów ri.Połóżmy qi = ri, dla 0 ¬ i ¬ N , oraz aby skrócić notację oznaczmy
qT = [qT0 , qT1 , q
T2 , . . . , q
TN ].
Funkcja Lagrange’a układu wyraża się następująco
L = L(q, q) = T − V = 12
N∑
i=0
mi‖qi‖2 +G∑
0¬i<j¬N
mimj‖qi − qj‖
. (3.4)
Zatem pędy uogólnione pi, sprzężone z qi dane są przez
pi =∂L
∂qi=
∂L
∂q1i∂L
∂q2i∂L
∂q3i
= miqi, 0 ¬ i ¬ N. (3.5)
Ponieważ funkcja Hamiltona zdefiniowna jest następująco
H = H(q,p) = pT q − L(q, q) = T + V, (3.6)
gdziepT = [pT0 ,p
T1 ,p
T2 , . . . ,p
TN ],
18

zatem ostatecznie otrzymujemy
H =12
N∑
i=0
1mi‖pi‖2 −G
∑
0¬i<j¬N
mimj‖qi − qj‖
. (3.7)
Równania ruchu Hamiltona dla N + 1 ciał mają postać
qi =∂H
∂pi=pimi,
pi = −∂H
∂qi= −G
∑
0¬i<j¬N
mimjq3ij(qi − qj).
(3.8)
3.1.2 Barycentryczny układ odniesienia
Wybierzmy dowolny inercjalny układ odniesienia. Rozpatrzmy zagadnieniepoczątkowe dla równań (3.1), to znaczy
miri = −GN∑′
i,j=0
mimjr3ij(ri − rj),
ri(0) = r0i , ri(0) = v0i , i = 0, . . . , N,
(3.9)
gdzie r0i oraz v0i , 0 ¬ i ¬ N , są danymi początkowymi tj. położeniami i
prędkościami ciał zapisanymi w wybranym układzie odniesienia.Niech wektory ri(t) będą rozwiązaniem tego zagadnienia początkowe-
go. Wówczas, korzystając z zasady zachowania pędu otrzymamy, że środekmasy układu porusza się ruchem jednostajnym prostoliniowym. Rzeczywi-ście, mamy
mR(t) =N∑
i=0
miri(t) = P (t), (3.10)
orazP (t) = 0. (3.11)
Zatem całkowity pęd układu jest wielkością stałą P (t) = P 0, a więc
R(t) =1mP 0t+R0, (3.12)
gdzie R0 to początkowe położenie środka masy układu.Ze środkiem masy układu można związać inercjalny układ odniesie-
nia, który nazywa się układem środka masy bądź układem barycentrycznym.Jeżeli przyjąć, że orientacja jego osi jest taka jak ustalonego wcześniej ukła-du inercjalnego to jest on zdefiniowany przez warunki początkowe r0i , v
0i ,
i = 0, . . . , N .
19

W praktyce równania (3.9) nie zależą od wyboru R(t) i R(t), więcmożemy założyć, że
R(0) =1m
N∑
i=0
mir0i = 0, P (0) =
N∑
i=0
miv0i = 0, (3.13)
orazR(t) = 0, (3.14)
wówczas
r0(t) = −1m0
N∑
i=1
miri(t), (3.15)
zatem wystarczy całkować rówania dla ri, i = 0, . . . , N wstawiając w nichzamiast r0 rówanie (3.15).
3.1.3 Współrzędne względne
W układah planetarnych zazwyczaj jedno z ciał ma masę dużo większą odpozostałych (nie licząc układów wielokrotnych). Tym ciałem jest gwiazda.Okazuje się, że czasami wygodnie jest opisywać ruch planet względem tegocentralnego ciała — gwiazdy.
Opisując ruch planet wokół gwiazdy, przyjmijmy za nowe uogólnionewspółrzędne N wektorów względnych położeń ciał w odniesieniu do gwiazdy
Qi = ri − r0, 1 ¬ i ¬ N. (3.16)
Jako Q0 przyjmijmy współrzędne centrum masy
Q0 =1m
N∑
i=0
miri. (3.17)
Taka transformacja współrzędnych może być przedstawiona w zwartej formiemacierzowej
Q = Aq, (3.18)
gdzie
A =1m
m0E, m1E, m2E, . . . , mNE−mE, mE, 0, . . . , 0
−mE, 0, mE, . . . , 0...
....... . .
...−mE, 0, 0, . . . , mE
. (3.19)
20

Transformacja ta jest odwracalna, więc mamy
q = A−1Q, (3.20)
gdzie
A−1 =1m
mE, −m1E, −m2E, . . . , −mNEmE, (m−m1)E, −m2E, . . . , −mNEmE, −m1E, (m−m2)E, . . . , −mNE...
....... . .
...mE, −m1E, −m2E, . . . , (m−mN)E
. (3.21)
Możemy także zapisać to równanie w postaci niemacierzowej
q0 = r0 = Q0 −1m
N∑
i=1
miQi, (3.22)
orazqi = ri = Qi + r0, 1 ¬ i ¬ N. (3.23)
Teraz musimy wyrazić energię potencjalną i kinetyczną w odniesieniu donowych współrzędnych. Zacznijmy od potencjału
V = V (q) =−G∑
0¬i<j¬N
mimj‖qi − qj‖
=
−Gm0N∑
j=1
mj‖qj − q0‖
−G∑
1¬i<j¬N
mimj‖qi − qj‖
.
(3.24)
Aleqi − qj = Qi −Qj, dla 1 ¬ i < j ¬ N,
i wtedy
V = V (q(Q)) = V (Q) = −Gm0N∑
j=1
mj‖Qj‖
−G∑
1¬i<j¬N
mimj‖Qi −Qj‖
. (3.25)
Najważniejszą rzeczą jaką możemy zauważyć jest fakt, że w nowych zmien-nych potencjał nie zależy od zmiennych Q0. Powyższa transformacja możezostać rozszerzona do zmiennych kanonicznych poprzez podstawienie
P = Bp, (3.26)
gdzieB = A−1
T.
21

Energia kinetyczna wyrażona w nowych współrzędnych i pędach ma postać
T = T (p(P )) =12
N∑
i=0
1mipTi pi =
12pTMp =
12P TGP , (3.27)
gdzie przyjęliśmy następujące oznaczenia
M =
1m0E, 0, . . . , 0
0,1m1E, . . . , 0
....... . .
...
0, 0, . . . ,1mNE
,
oraz
G = AMAT =
1mE, 0, 0, . . . , 0
0,( 1m0+1m1
)
E,1m0E, . . . ,
1m0E
0,1m0E,
( 1m0+1m2
)
E, . . . ,1m0E
......
.... . .
...
0,1m0E,
1m0E, . . . ,
( 1m0+1mN
)
.
Ostatecznie energię kinetyczną możemy zapisać jako
T =12m‖P 0‖2 +
12
N∑
i=1
( 1m0+1mi
)
‖P i‖2 +1m0
∑
1¬i<j¬N
P Ti P j. (3.28)
Funkcja Hamiltona w nowych zmiennych wygląda następująco
H(Q,P ) =12m‖P 0‖2 +
12
N∑
i=1
( 1m0+1mi
)
‖P i‖2 +1m0
∑
1¬i<j¬N
P Ti P j
−Gm0N∑
j=1
mj‖Qj‖
−G∑
1¬i<j¬N
mimj‖Qi −Qj‖
,
(3.29)
i nie zależy od Q0, a co za tym idzie P 0 jest wektorową całką pierwszą. Małotego, równania w zmiennych kanonicznych Qi, P i, 1 ¬ i ¬ N nie zależą odstałej wartości P 0, więc możemy prosto wybrać P 0 = 0.
22

3.2 Współrzędne Jacobiego, równania ruchu
Najczęściej zakładanym modelem układu planetarnego jest model, w którymplanety poruszają się po orbitach keplerowskich i nie oddziaływują ze sobą.W rzeczywistości wszystkie masywne ciała wywierają wpływ na ruch innychciał i szczególnie podczas zbliżeń oddziaływania te nie mogą być zaniedby-wane. Okazuje się, że naturalnymi współrzędnymi nadającymi się do opisuukładów, w których ciała oddziaływują ze sobą są współrzędne JacobiegoRi, zdefiniowane następująco [6]
Rk = rk −1µk−1
k−1∑
i=0
miri, dla k = 1, . . . , N, (3.30)
R0 =1µN
N∑
i=0
miri, µk =k∑
i=0
mi, (3.31)
gdzie R0 oznacza wektor skierowany od środka układu współrzędnych dobarycentrum, a wektor Ri skierowany jest od centrum masy ciał P0, . . . , Pi−1do ciała Pi. Taka transformacja może być przedstawiona także w postacimacierzowej
R = Kr, (3.32)
gdzie
K =
m0µNE,
m1µNE,
m2µNE,
m3µNE, . . . ,
mNµNE
−E, E, 0, 0, . . . , 0
−m0µ1E, −m1
µ1E, E, 0, . . . , 0
−m0µ2E, −m1
µ2E, −m2
µ2E, E, . . . , 0
......
....... . .
...
−m0µNE, −m1
µNE, −m2
µNE, −m3
µNE, . . . , E
.
Relacja pozwalająca przejść od współrzędnych Jacobiego do innegodowolnego układu odniesienia ma następującą postać
rk = R0 +µk−1µkRk −
N∑
i=k+1
miµiRi, k = 0, . . . , N, (3.33)
23

gdzie zakładamy, że µ−1 = 0. Forma macierzowa tej transformacji wyglądanastępująco
r = K−1R, (3.34)
gdzie
K−1 =
E, −m1µ1E, −m2
µ2E, −m3
µ3E, . . . , −mN
µNE
E,µ0µ1E, −m2
µ2E, −m3
µ3E, . . . , −mN
µNE
E, 0,µ1µ2E, −m3
µ3E, . . . ,
mNµNE
E, 0, 0,µ2µ3E, . . . ,
mNµNE
......
....... . .
...
E, 0, 0, 0, . . . ,µN−1µNE
.
Transformacja pędów jest następująca
P = Sp, (3.35)
gdzieS = K−1
T. (3.36)
Energia kinetyczna we współrzędnych Jacobiego ma postać
T = T (p(P )) =12
N∑
i=0
1mipTi pi =
12pTMp =
12P TRP , (3.37)
gdzie
R = KMKT =
1mE, 0, 0, . . . , 0
0,µ1µ0m1
E, 0, . . . , 0
0, 0,µ2µ1m2
E, . . . , 0
......
.... . .
...
0, 0, 0, . . . ,µN
µN−1mNE
.
24

Ostatecznie energia kinetyczna przedstawia się następująco
T =12µN‖P 0‖2 +
12
N∑
i=1
µiµi−1mi
‖P i‖2. (3.38)
Potencjał wyraża się następującą formułą
V = V (R) = −G∑
0¬i<j¬N
mimj
‖ −Rj + µi−1µi Ri −∑j−1k=i+1
mkµkRk‖. (3.39)
Powyższy potencjał można rozłożyć na dwie składowe
V = V0 + V1. (3.40)
Składowa V0 opisuje nam potencjał pochodzący od gwiazdy, w którym poru-szają się inne ciała. Można go zapisać jako
V0 = −GN∑
j=1
m0mj
‖Rj +∑j−1k=i+1
mkµkRk‖. (3.41)
Rozwijając go w szereg Taylora i urywając na wielkościach drugiego rzęduotrzymamy
V0 = −GN∑
j=1
m0mj
1‖Rj‖
−∑j−1k=1
mkµkRk ·Rj
‖Rj‖3
. (3.42)
Rozwijając w szereg Taylora część potencjału V1 i podobnie jak wyżej ury-wając go na wielkościach drugiego rzędu mamy
V1 = −G∑
1¬i<j¬N
mimj‖Rij‖
, (3.43)
gdzieRij = Ri −Rj, i, j = 1, . . . , N.
Funkcję Hamiltona we współrzędnych Jacobiego możemy przedstawićjako
H =12µN‖P 0‖2 +
12
N∑
i=1
µiµi−1mi
‖P i‖2 −GN∑
i=1
m0miRi+ H1(R1, . . . ,RN),
(3.44)gdzie H1 = H1(R1, . . . ,RN) jest częścią odpowiedzialną za oddziaływania.Jeśli założymy, że masy planet są małe i dodatkowo są tego samego rzędu ε,
25

to funkcja Hamiltona H1 jest rzędu ε2. Część funkcji Hamiltona zawierającąoddziaływania możemy przedstawić jako H1 = H1 +O (ε3), gdzie
H1 = −GN∑
1¬i<j¬N
mimj
(
1‖Rij‖
− Ri ·Rj‖Rj‖3)
, (3.45)
H = H0 +H1 + . . . , (3.46)
H0 =12
N∑
i=1
µiµi−1mi
‖P i‖2 −GN∑
i=1
m0miRi. (3.47)
W rówaniu (3.46) część H0 opisuje sumę hamiltonianów N niezależnych odsiebie zagadnień Keplera, natomiast H1 jest zaburzeniem. Postać równań(3.45), (3.46) i (3.47) pokazuje, że współrzędne Jacobiego najlepiej opisujązagadnienie planetarne jako perturbowane zagadnienie Keplera. Z tego wła-śnie powodu wielu astronomów twierdzi, że najlepiej jest interpretować ele-menty keplerowskie z dopasowania keplerowskiego jako elementy Jacobiego,a co ja w niniejszej pracy magisterskiej będę starał się zweryfikować.
3.3 Model keplerowski
Opisany poniżej model keplerowski różni się w szczegółach od powszechnieużywanej wersji, używanej przy opisie prędkości radialnych gwiazd podwój-nych. Na początek wprowadźmy kilka podstawowych definicji ruchu keple-rowskiego [2]. Wektor wodzący R(t) oraz prędkość V(t) ciała poruszającegosię po orbicie eliptycznej dane są wzorami
R(t) =a(1− e2)1 + e cos ν
[cos ν(t)P+ sin ν(t)Q] , (3.48)
V(t) =an√1− e2
[− sin ν(t)P+ (e+ cos ν(t)) Q] , (3.49)
gdzieP = l cosω +m sinω, Q = −l sinω +m cosω,
oraz
l =
cos Ωsin Ω0
, m =
− cos i sin Ωcos i cos Ω
sin i
.
Anomalia prawdziwa ν = ν(t) jest jawną funkcją czasu, co widać poprzezrównanie
tgν
2=
√
1 + e1− e tg
E
2, (3.50)
26

gdzie E = E(t) to anomalia mimośrodowa wyznaczana z równania KepleraE − e sinE = M, a M to anomalia średnia dana wzorem M = n(t − Tp),oraz n = 2π/P , a P jest okresem obiegu ciała. Pozostałe parametry a, e,i, ω, Ω, Tp są standardowymi elementami keplerowskimi — półoś wielka,mimośród, nachylenie orbity, długość orbitalna peryastronu, długość węzławstępującego oraz moment przejścia przez peryastron. Ruch średni n orazpółoś wielka orbity a powiązane są relacją n2a3 = µ, gdzie µ to parametrgrawitacyjny. Jawna forma µ oraz znaczenie R(t) i V(t) zależą od tego,który problem Keplera rozważamy (orbitę względną w zagadnieniu dwóchciał, orbitę barycentryczną, itp.).
Załóżmy teraz, że omawiane ciało jest planetą o masie m krążącąwokół gwiazdy o masie m? oraz niech R(t), V(t) i R?(t), V?(t) oznaczająbarycentryczny promień wodzący i prędkość odpowiednio planety i gwiazdy.Poprzez ρ(t) = R(t) − R?(t) i υ(t) = V(t) − V?(t) oznaczamy względnypromień wodzący i prędkość planety. Z definicji środka masy mamy
R?(t) = −m
m?R(t) = − m
m? +mρ(t), (3.51)
V?(t) = −m
m?V(t) = − m
m? +mυ(t). (3.52)
Wybierzmy układ barycentryczny w ten sposób, że jego trzecia oś będzie mia-ła kierunek od obserwatora do środka masy układu. Okaże się natychmiast, żeprędkość radialna gwiazdy jest trzecią składową jej prędkości barycentrycznej
v?r (t) ≡ V ?3 (t). (3.53)
Wyrazimy teraz v?r (t) poprzez elementy keplerowskie planety
v?r (t) = −K [cos(ν + ω) + e cosω] , (3.54)
gdzie jawna forma K jak również wszystkie elementy keplerowskie będą za-leżeć od wyboru orbity.
W przypadku orbity barycentrycznej
K =σan sin i√1− e2
, gdzie σ =m
m?oraz µ =
Gm3?(m? +m)2
. (3.55)
Dla orbity względnej forma K jest taka sama z wyjątkiem
σ =m
m?i µ = G(m? +m). (3.56)
Jeśli zastosujemy dopasowanie najmniejszych kwadratów do danych pręd-kości radialnych obydwie parametryzacje dadzą takie same wyniki (oczywi-ście po odpowiednich przekształceniach). Nie jest w pełni jasne kiedy do
27

czynienia mamy z jedną planetą. Zazwyczaj prędkość radialna gwiazdy mo-delowana jest we współrzędnych barycentrycznych jako suma części (3.54)policzonych dla każdej z planet (ale półosie wielkie orbit planet oraz dol-ne ograniczenie na ich masy są często zadawane dla orbit względnych, cojest co najmniej dziwnym założeniem dla układów zawierających więcej niżjedną planetę). Okazuje się, że nawet jeśli założymy, że planety nie oddzia-ływują pomiędzy sobą bezpośrednio, to ich orbity i tak nie są keplerowskie.W takim przypadku jedna planeta oddziaływuje na inną pośrednio poprzezswój wpływ na gwiazdę. Astronomowie zauważyli, że podwójne dopasowa-nie keplerowskie powinno odbywać się we współrzędnych Jacobiego, a nie wewspółrzędnych barycentrycznych. Idąc dalej tym tropem okazuje się, że niewolno wyznaczać mas planet używając tych samych wzorów, których używa-my dla współrzęnych barycentrycznych. Okazuje się także, że nie ma żadnegodobrze zdefiniowanego parametru grawitacyjnego, jeżeli prędkości radialne zdopasowania w układach wieloplanetarnych są reprezentowane bezpośredniow barycentrycznych elementach Keplera.
Załóżmy, że mamy dwie planety o masach m1 oraz m2. Ich promieniewodzące i prędkości względem barycentrum oznaczmy przez Ri, Vi, i = 1, 2.Współrzędne i prędkości Jacobiego ri, vi zdefiniowane za pomocą (3.30) i(3.31) mają następującą postać
r1 = R1 −R?, r2 = R2 −1
m? +m(m?R? +m1R1) , (3.57)
v1 = V1 −V?, v2 = V2 −1
m? +m(m?V? +m1V1) . (3.58)
Wektor r1 jest położeniem m1 względem m? oraz r2 jest położeniem m2względem środka masy układu składającego się zm? im1. We współrzędnychJacobiego mamy
R? = −σ1r1 − σ2r2, V? = −σ1v1 − σ2v2, (3.59)
gdzieσ1 =
m1m? +m1
i σ2 =m2
m? +m1 +m2. (3.60)
Jak już wspomnieliśmy, we współrzędnych Jacobiego możemy rozważać za-gadnienie trzech ciał jako zaburzenie zagadnienia dwóch ciał: planetam1 plusgwiazda oraz planeta m2 i fikcyjny środek masy m? +m1. Przybliżając ruchplanet poprzez te dwa zagadnienia otrzymujemy
v?r (t) = −K1f1(t)−K2f2(t), (3.61)
28

gdzie
Kk =σkaknk sin ik√
1− e2k, (3.62)
µ1 = G(m? +m1) i µ2 = G(m? +m1 +m2) (3.63)
oraz
fk(t) = cos(νk + ωk) + ek cosωk, dla k = 1, 2. (3.64)
29

Rozdział 4
Charakterystyka wybranych
układów dwuplanetarnych
4.1 Hipotetyczny układ dwuplanetarny
W moich badaniach posłużyłem się hipotetycznym układem planetarnym.Układ ten posiada planety o masach: m1 = 5 MJ i m2 = 10 MJ natomiastgwiazda ma masę M? = 1.0 M. Parametry orbit przedstawione są w poniż-szej tabeli
parametry orbit planeta b planeta c
a 1− 3, 5 AU 5 AUe 0− 0, 5 0, 0i 90o 90o
ω 0o 0o
Ω 0o 0o
M 360o 360o
Posługując się parametrami tego układu planetarnego, postanowiłemprzeprowadzić kilka symulacji opisanych w rozdziałach 6.3.1, 6.3.2, 6.3.3 i6.3.4.
4.2 Układ planetarny gwiazdy HD 160691
Gwiazda HD 160691 (HIP 86796) ma jasność wizualną V= 5, 20m, jasnośćabsolutną MV = 4, 28m, co odpowiada odległości 15,3 parseka. Typ wid-mowy tej gwiazdy to G5 V, a metaliczność [Fe/H] = 0, 28. Masa gwiazdyto M? = 1.08 M. Gwiazda HD 160691 jest chromosferycznie nieaktywna.
30

Porównując astrometryczne pomiary satelity Hipparcos z prędkościami ra-dialnymi z katalogu Simbad okazuje się, że gwiazda ta ma bardzo mały ruchwłasny około 3 km/s.
W pierwszym zestawie 21 pomiarów prędkości radialnych wykonanychpomiędzy listopadem 1998 roku a listopadem 2000 roku, z dopasowania ke-plerowskiego udało się znaleźć planetę o masie 1,97 MJ, mimośrodzie orbity0,62, półamplitudzie 53,6 m/s i półosi orbity 1,65 AU.
Kolejne 17 pomiarów prędkości radialnych pokazało, że może znajdo-wać się tam druga planeta. Zestaw parametrów dla tego układu znajduje sięw poniższej tabeli.
parametry orbit planeta b planeta c
a 1, 460 AU 2, 813 AUe 0, 326 0, 700ω 140, 1o 293, 4o
M 315, 2o 253, 4o
P 619, 43 d 1655, 5 dK 38, 3 m/s 23, 5 m/sM sin i 1, 69 MJ 1, 44 MJ
Dane użyte do symulacji i prezentowane w powyższej tabelce zaczerp-nięte zostały z pracy:Where is the Second Planet in the HD 160691 PlanetarySystem?, Goździewski i inni [2].
4.3 Układ planetarny gwiazdy HD 12661
Gwiazda HD 12661 (HIP 9683) jest gwiazdą ciągu głównego typu G6V ojasności wizualnej V = 7, 43m i wskaźniku barwy B− V = 0, 71m. Para-laksa µ = 26, 9 mas zmierzona przez satelitę Hipparcos przekłada się naodległość 37, 16 parseka i jasność absolutną MV = 4, 38m. Z modelowaniasyntezy widma temperatura gwiazy wynosi Teff = 5644± 30 K, metaliczność[Fe/H] = 0, 293± 0, 05 oraz ruch własny v sin i = 3, 08± 0, 5 km/s. GwiazdaHD 12661 jest chromosferycznie nieaktywna, a okres jej obrotu wynosi 34, 2dnia. Masa gwiazdy to M? = 1.07 M.
Odkrycie pierwszej, wewnętrznej planety okrążającej tę gwiazdę zo-stało ogłoszone w 2001 roku przez Fishera i współautorów. Od tego czasudopasowując model układu jednoplanetarnego do danych obserwacyjnych w
31

residuach dał się zauważyć słaby liniowy tręd. Obserwacje z teleskopów Lickai Kecka potwierdzają istnienie drugiej planety wokół gwiazy HD 12661.
parametry orbit planeta b planeta c
a 0, 823 AU 2, 781 AUe 0, 343 0, 128ω 113, 8o 303, 1o
M 132, 1o 342, 5o
P 263, 6 d 1444, 5 dK 74, 4 m/s 27, 6 m/sM sin i 2, 32 MJ 1, 63 MJ
Dane użyte do symulacji i prezentowane w powyższej tabelce zaczerp-nięte zostały z pracy The Janus Head of the HD 12661 Planetary System?,Goździewski i inni [3].
Dwuplanetarne zagadnienie Keplera zostało rozwiązane przy pomo-cy dwóch różnych algorytmów dopasowywania. Pierwszy z nich polegał naoszacowaniu wejściowych parametrów (elementów) orbit poprzez dopasowa-nie jednoplanetarnego zagadnienia Keplera do głównych zmian predkości ra-dialnych, a następnie ponowne dopasowanie jednoplanetarnego zagadnieniaKeplera do residuów. Wielokrotne powtórzenia tego dwukrokowego schema-tu prowadzą do bardzo dobrego dopasowania dwóch zagadnień Keplera doobserwacji. Drugi z algorytmów polegał na użyciu parametrów wejściowychz pierwszego algorytmu do metody minimalizacji Levenberga-Marquardtapomiędzy obserwacjami a dwuplanetarnym modelem keplerowskim z jedna-stoma wolnymi parametrami. Elementy orbit uzyskane przy pomocy obydwumetod mieszczą się w niepewnościach wyznaczonych z metody Monte Carlo.
Niepewności parametrów orbit zostały oszacowane z symulacji MonteCarlo, gdzie gaussowski szum został przeskalowany do rzeczywistych błędów,a następnie dodany do zaobserwowanych prędkości radialnych. W kolejnymkroku prędkości z symulacji Monte Carlo zostały uruchomione z dwukroko-wym keplerowskim kodem dopasowującym, a średnie odchylenia paramteróworbit w tych doświadczeniach oznaczono jako rzeczywiste błędy. Prawdziwaniepewność w okresie obiegu zewnętrznej planety HD12661 (Pc) jest zwią-zana z tym, że w początkowej fazie zostało wykonanych mało obserwacji,jak również z tym, że do tej pory pokryto obserwacjami tylko jeden obiegplanety.
32

Rozdział 5
Metody wyznaczania
parametrów układów
planetarnych
Aby wyznaczyć parametry układu planetarnego musimy z wybranym przeznas modelem dopasować się do danych obserwacyjnych. Miarą dobroci dopa-sowania są wartości funkcji χ2 (zależnej od parametrów orbit p), którą bę-dziemy minimalizować. W moich badaniach użyłem metody najmniejszychkwadratów. W metodzie tej szukamy takich wartości parametrów p, dla któ-rych funkcja χ2 przyjmuje wartość minimalną. Funkcję tę można przedstawićnastępująco
χ2(p) =Np∑
i=1
(
vr(ti,p)− vr,iσi
)2
, (5.1)
gdzie Np to ilość obserwacji, vr(ti,p) — prędkość radialna gwiazdy zależna odparametrów orbit p, wymodelowana na czasy obserwacji ti, vr,i — zaobser-wowana prędkość radialna gwiazdy, a σi to błędy obserwacji. Najlepsze dopa-sowanie otrzymamy w momencie znalezienia minimum funkcji χ2(p). Aby tozrobić możemy się posłużyć dwoma głównymi metodami poszukiwania mini-mum funkcji, a mianowicie metodami gradientowymi lub bezgradientowymi.
5.1 Metody gradientowe
Metody gradientowe znajdowania minimum funkcji opierają się na znajdowa-niu kierunku maksymalnej zmiany funkcji χ2(p). Musimy więc zróżniczkowaćnaszą funkcję po parametrach układu p, czyli znaleźć gradient funkcji. Ogól-na zasada działania metod gradientowych jest następująca. Wybieramy sobie
33

dowolny zestaw parametrów p i liczymy dla niego gradient i wartość funk-cji χ2(p). Następnie przesuwamy się w kierunku przeciwnym do gradientufunkcji o pewien krok i dla nowego zestawu parametrów liczymy gradient iwartość funkcji. Algorytm ten powtarzamy wielokrotnie, aż osiagniemy mi-nimum, czyli gdy kwadrat gradientu funkcji będzie mniejszy od założonejprzez nas dokładności. Istnieje wiele metod gradientowych, jak na przykład:metoda gradientu prostego, metoda gradientów sprzężonych, algorytm Le-venberga - Marquardta, itp. W badaniach do mojej pracy magisterskiej po-służyłem się metodą Levenberga - Marquardta, której pełne wytłumaczeniemożna znaleźć w książce Numerical Recipes.
5.2 Metody bezgradientowe
Metody bezgradientowe — jak sama nazwa wskazuje — nie wymagają zna-jomości gradientu funkcji. W poszukiwaniach minimum istotna jest tylkoinformacja o wartości funkcji χ2(p) w danym punkcie (dla danego zestawuparametrów p). Ogólna zasada działania metod bezgradientowych opiera sięna znajdowaniu wartości funkcji dla kolejnych punktów. Minimum znalezionejest wówczas, gdy różnica wartości funkcji w dwóch kolejnych punktach jestmniejsza od założonej dokładności. Najpopularniejszymi metodami bezgra-dientowymi są metoda simplexu i algorytmy genetyczne.
5.3 Dopasowanie keplerowkie
Mając do dyspozycji czasy obserwacji, wartości prędkości radialnych w tychpunktach oraz błędy pomiarowe możemy dopasować do nich symulowanąkrzywą radialną. W przypadku modelu keplerowskiego korzystamy ze wzo-rów (3.54) lub (3.61). Parametrami modelu są następujące wielkości: Ki,ni, ei, ωi oraz Tp,i (dla i = 1, 2), czyli odpowiednio półamplitudy prędko-ści radialnych, ruchy średnie, mimośrody orbit, argumenty perycentrów orazczasy przejścia planet przez perycentra. Zmieniając parametry p w modelukeplerowskim uzyskujemy różne krzywe prędkości radialnych vr(ti,p), a coza tym idzie różne χ2(p) (dopasowanie). Metodą minimalizacji funkcji χ2(p)używaną przeze mnie jest metoda Levenberga - Marquardta.
34

5.4 Dopasowanie pełnych równań ruchu dla
N-ciał
Dopasowanie pełnego modelu uwzględniającego oddziaływania pomiędzy pla-netami jest o wiele trudniejszym zadaniem, niż dopasowanie keplerowskie. Wmodelu keplerowskim paramerty orbit nie zmieniają się w czasie, więc wy-staczy je podstawić do wzorów (3.51) i na dowolnie zadany czas możemywyliczyć położenie i prędkość ciała na orbicie, a z tego prędkość radialnągwiazdy. Dla oddziaływujących grawitacyjnie N planet modelem jest zagad-nienie N + 1 ciał opisane równaniami (3.1). Dla takiego modelu parametra-mi są początkowe położenia i prędkości planet lub też oskulacyjne elementykeplerowskie planet podane na początkową chwilę czasu. W celu policzeniaprędkości radialnej gwiazdy należy scałkować równania ruchu i policzyć pręd-kości planet na momenty czasów obserwacji.
35

Rozdział 6
Problem i wyniki
6.1 Przedstawienie problemu
Pomimo faktu, iż aktualnie wykryto ponad 120 układów planetarnych, todla znakomitej większości z nich, dane obserwacyjne na podstawie którychdokonano ich odkrycia nie są dostępne. W publikacjach donoszących o tychodkryciach podawane są jedynie elementy keplerowskie orbit planet. Wszy-scy obserwatorzy dopasowują do obserwacji modele keplerowskie. Taki modeljest w pełni poprawny tylko w przypadku, gdy w układzie znajduje się tylkojedna planeta. Aktulanie znanych jest 13 układów z dwoma lub więcej pla-netami. Dla takich układów model keplerowski jest niepoprawny. Tym niemniej dla takich układów obserwatorzy również publikują informacje o or-bitach planet uzyskane poprzez dopasowanie prostej sumy dwu lub więcejorbit keplerowskich. Pomimo licznych doniesień, że taka procedura jest nie-poprawna, w dalszym ciągu obserwatorzy stosują tylko i wyłącznie modelkeplerowski. W związku z powyższym pojawia się szereg problemów związa-nych z prawidłową interpretacją uzyskanych przez nich wyników.
Pierwszy z nich dotyczy dokładności wyznaczania położeń i prędkościplanet dla ustalonej chwili czasu (np. na punkt środkowy przedziału obser-wacji). Interpretacja podawanych elementów keplerowskich jako elementówoskulacyjnych nie może być poprawna w przypadkach gdy oddziaływaniapomiędzy planetami są silne. Dlatego też pierwszym celem niniejszej pracymagisterskiej było określenie na ile niedokładny jest model keplerowski dlaukładów dwuplanetarnych o charakterystykach podobnych do tych zaobser-wowanych
Drugi problem jest następujący. Dopasowując model keplerowski wy-znaczamy parametry K, n, e, ω oraz Tp dla każdej z planet. Pojawia się więcpytanie czy wielkości te opisują keplerowskie orbity barycentryczne, astro-
36

centryczne (względne), czy też Jacobiego (rysunki 6.1 – 6.4)? W literaturzepojawiło się kilka argumentów przemawiających za tym, że najwłaściwszejest zinterpretowanie tych elementów jako keplerowskich elementów policzo-nych we współrzędnych Jacobiego. Jednakże każdy z tych trzech opisów jestprzybliżeniem tego samego rzędu. Zatem naturalne jest pytanie czy rzeczy-wiście elementy Jacobiego są najlepsze?
6.2 Metoda badań
Aby znaleźć odpowiedź na pytanie na ile elementy keplerowskie z dopaso-wania keplerowskiego opisują faktyczny stan układu planetarnego napisałemodpowiednie oprogramowanie. Pierwszą rzeczą było wygenerowanie „rzeczy-wistych” prędkości radialnych gwiazdy. W tym celu napisana została proce-dura całkująca równania ruchu we współrzędnych kartezjańskich Jacobiego(model nieliniowy), a następnie liczone były prędkości radialne na losowowygenerowane wcześniej momenty czasu. Aby sprawić by prędkości radial-ne były bardziej realistyczne, w niektórych symulacjach dodawane były donich symulowane błędy pomiarowe. Druga część programu miała za zada-nie dobierać parametry keplerowskie w ten sposób, aby uzyskać jak najlep-sze dopasowanie wygenerowanej krzywej prędkości radialnych, czyli znaleźćminimum funkcji χ2(p) (rozdział 5). Dla najlepszego dopasowania parame-try keplerowskie przeliczane były na elementy: Jacobiego, barycentryczne iwzględne. Aby móc je porównać z rzeczywistymi elementami oskulacyjnymiprogram generujący prędkości radialne całkował równania ruchu na środkowąobserwację z zadanego przedziału czasu, a następnie uzyskane współrzędnekartezjańskie Jacobiego transformowane były do elementów Jacobiego, ba-rycentrycznych i względnych. Po to aby zobrazować rezultaty z przeprowa-dzonych doświadczeń utworzyłem różnice odpowiednich parametrów w tychsamych współrzędnych i sprawdzałem jak zmieniają się owe różnice wrazze zmianą parametrów a i e jednej z planet. W wyniku przeprowadzonychsymulacji uzyskałem wiele mapek, na których osie x i y odpowiednio pre-zentują elementy a i e, a na osi z znajdują się różnice kolejnych parametrówsymulowanych i dopasowanych (rysunki 6.5 – 6.28).
6.3 Interpretacja wyników
Oglądając wyniki (mapki) z przeprowadzonych symulacji na pierwszy rzutoka widać, że w ogólności model Keplera nie daje poprawnych ustawieńwzględnych orbit, ani właściwego położenia planet na orbitach. Natomiast
37

półosie orbit, a w szczególności mimośrody są całkiem dobrze odtworzoneprzez ten model. Z całą stanowczością mogę jednak stwierdzić, że model ke-plerowski nie nadaje się do wyznaczania rzeczywistych parametrów układówdwu lub więcej planetarnych. Jeśli już użyjemy tego modelu w dopasowaniu,to należy przyjrzeć się elementom orbit w różnych układach współrzędnych.W kilku kolejnych symulacjach opisanych poniżej prezentuję uzyskane przezemnie wyniki.
6.3.1 Symulacja 1
Pierwszym krokiem w przeprowadzonych przeze mnie doświadczeniach byłostworzenie „idealnego” układu planetarnego opisanego w rozdziale 4.1. Po toaby dobrze dopasować model keplerowski do danych „rzeczywistych” wyge-nerowałem 200 pomiarów prędkości radialnych w przedziale czasu równymdwóm okresom obiegu drugiej planety. Do prędkości radialnych nie zostałydodane błędy. W doświadczeniu sprawdzane było zachowanie się dopasowa-nia podczas zmian półosi i mimośrodu orbity pierwszej planety. Dla współ-rzędnych Jacobiego różnice w półosiach orbit nie przekraczają 2% (rysunek6.5). We współrzędnych barycentrycznych dla pierwszej planety widać wyraź-nie słabe dopasowanie skutkujące błędem około 10%, natomiast dla współ-rzędnych względnych różnice w półosi drugiej planety są na poziomie -4%.Na wszystkich mapkach przedstawiających różnice półosi obydwóch planetwe wszystkich współrzędnych widać wyraźnie dużą wyspę gorszego dopa-sowania. Pogorszenie dopasowania w tym miejscu spowodowane jest tym,że są to odległości rezonansowe z drugą planetą. Za powstanie tej wyspyodpowiadają rezonanse 3:1, 5:2 i 8:3. Sytuacja wygląda podobnie jeśli cho-dzi o globalne dopasowanie mimośrodów orbit (rysunek 6.6). Analogiczniejak dla półosi orbit, mimośród pierwszej planety we współrzędnych bary-centrycznych i mimośród drugiej planety we współrzędnych względnych sądopasowane najgorzej. Ogólnie rzecz biorąc mimośrody orbit dopasowane sądość dobrze, gdyż różnice nie przekraczają 0,05. Patrząc więc na dopaso-wanie półosi orbit i mimośrodów można powiedzieć, że model keplerowskidobrze oddaje kształt orbity. Sprawa ma się znacznie gorzej z ustawieniemwzględnym orbit i położeniem planet na orbitach (rysunki 6.7 i 6.8). Błędy wargumentach perycentrów sięgają 30o, natomiast dla anomalii średniej nawet60o.
6.3.2 Symulacja 2
W symulacji drugiej użyłem układ planetarny z symulacji pierwszej (rozdział4.1). Obserwatorzy dysponują obecnie niewielką liczbą obserwacji pokrywa-
38

jącą zazwyczaj małą część obiegu dalszej — drugiej planety. Postanowiłemsprawdzić jak zachowuje się dopasowanie jeżeli zmniejszę liczbę obserwacji z200 do 40, a obserwacje te będą pokrywały 1,5 okresu obiegu drugiej planety.Błędy obserwacyjne nadal nie odgrywają żadnej roli (σ = 0 m/s). Okazujesię, że zmniejszenie ilości obserwacji i zmniejszenie pokrycia okresu drugiejplanety nie wpłynęło znacząco na dopasowanie. Różnice pomiędzy parame-trami symulowanymi a dopasowanymi są bardzo podobne jak w przypadkusymulacji pierwszej. W związku ze zmniejszeniem ilości obserwacji zwiększy-ła się ilość kompletnie złych dopasowań co jest widoczne w postaci „szumu”na rysunkach 6.9 – 6.12.
6.3.3 Symulacja 3
Aby uzyskać bardziej „rzeczywiste” obserwacje do układu z symulacji drugiejdodałem zaburzenia do prędkości radialnych. Okazuje się, że poprzez dodanielosowego zaburzenia na poziomie 3 – 10 m/s polepszyło się globalne dopaso-wanie — mam na myśli dużo mniejszą ilość „szumu” (rysunki 6.13 – 6.16),niż ma to miejsce w przypadku symulacji drugiej (rysunki 6.9 – 6.12). Błędydopasowania w poszczególnych współrzędnych i dla kolejnych elementów sąna tym samym poziomie co w symulacji drugiej.
6.3.4 Symulacja 4
W symulacji czwartej ponownie użyłem układ parametrów z symulacji dru-giej, to znaczy nie zostały dodane błędy do prędkości radialnych, ilość punk-tów obserwacyjnych wynosi 40, a pokrywają one 1,5 okresu obiegu drugiejplanety. Układ planetarny opisany jest w rozdziale 4.1, z tym wyjątkiem, żew symulacjach nachylenie orbity pierwszej planety wynosiło 85o, a nachyle-nie orbity drugiej planety 95o. Nachylenie względne orbit wynosiło więc 10o.Jak łatwo się domyślić względne nachylenie orbit wpływa na zmniejszeniesię oddziaływań grawitacyjnych pomiędzy planetami. Różnice w półosiachorbit są na poziomie poniżej 1%, natomiast we współrzędnych barycentrycz-nych dla pierwszej planety widać słabe dopasowanie z błędem około 15% orazdla współrzędnych względnych różnice w półosi drugiej planety są na pozio-mie także 15% (rysunek 6.17). Różnice w mimośrodach orbit są bliskie zera,natomiast dla pierwszej planety we współrzędnych barycentrycznych są napoziomie 0,1 (rysunek 6.18). Złe jest nadal dopasowanie ustawienia względ-nego orbit i położenia planet na orbitach (rysunki 6.19 i 6.20). Błędy te —podobnie jak we wszystkich wcześniejszych symulacjach — są na poziomie:argumenty perycentrów — 30o, anomalie średnie — 60o.
39

6.3.5 Symulacja 5
Do wygenerowania prędkości radialnych w tej symulacji użyte zostały para-metry z najlepszego dopasowania do rzeczywistych obserwacji dla układu pla-netarnego gwiazdy HD 160691, opisanego w rozdziale 4.2. Wysymulowanychzostało 38 obserwacji (tyle ile jest ich w rzeczywistości na stan dzisiejszy) wprzedziale czasu 2000 dni. Analizując różnice otrzymane z tego dopasowaniamożna dojść do ciekawych wniosków. Różnice półosi orbit obydwu planetdla wszystkich współrzędnych są mniejsze od 1% (rysunek 6.21). Okazujesię, że w przypadku układu planetarnego HD 160691 najlepiej jest interpre-tować dopasowane parametry keplerowskie jako elementy względne. Różnicepółosi drugiej planety dla dużych mimośrodów zarówno we współrzędnychJacobiego, jak i we współrzędnych barycentrycznych są dużo większe niż wewspółrzędnych względnych. Dopasowanie mimośrodów jest bardzo dobre —poniżej 0,05 (rysunek 6.22). Całkiem dobrze dopasowały się także argumentyperycentrów, a błędy dla obydwu planet we wszystkich współrzędnych są niewiększe niż 3o (rysunek 6.23). Anomalie średnie we wszystkich współrzędnychdopasowane są średnio — na poziomie 10o. Złe jest natomiast dopasowaniedla anomalii średniej drugiej planety — 30o (rysunek 6.24).
6.3.6 Symulacja 6
Wdzięcznym przykładem jest układ planetarny HD 12661, dla którego po-dobnie jak w symulacji z układem planetarnym HD 160691 parametry or-bit zaczerpnięte zostały z najlepszego dopasowania do danych rzeczywistych(rozdział 4.3). Rezultaty z tej symulacji przedstawiają się następująco. Za-równo półosie planet, mimośrody, jak i argumenty perycentrum dopasowałysię dość dobrze we współrzędnych Jacobiego i barycentrycznych. We współ-rzędnych względnych dopasowanie jest gorsze i wynosi dla: półosi — 2%,mimośrodów — 0.05, argumentów perycentrów — 5o (rysunki 6.25 – 6.27).Anomalie średnie dopasowały się źle, szczególnie dla drugiej planety, gdzieróżnice sięgnęły 60o (rysunek 6.28).
6.4 Graficzna prezentacja wyników
40

Rysunek 6.1: Prędkości radialne dla układów planetarnych z przeprowadzo-nych symulacji (podrozdziały 6.3.1 - 6.3.3).
41

Rysunek 6.2: Prędkości radialne dla układów planetarnych z przeprowadzo-nych symulacji (podrozdziały 6.3.4 - 6.3.6).
42

0 2000 4000 6000 8000 10000time [days]
0,8
0,9
1
1,1
1,2
Sem
i-m
ajor
axe
s of
firs
t pla
net [
AU
]
barycentric
Jacobirelative
Semi-major axes of first planet
0 2000 4000 6000 8000 10000time [days]
4,65
4,7
4,75
4,8
4,85
4,9
4,95
5
Sem
i-m
ajor
axe
s of
sec
ond
plan
et [A
U]
barycentric
Jacobirelative
Semi-major axes of second planet
0 2000 4000 6000 8000 10000time [days]
0,15
0,2
0,25
0,3
0,35
Ecc
entr
iciti
es o
f fir
st p
lane
t
barycentric
Jacobi
relative
Eccentricities of first planet
0 2000 4000 6000 8000 10000time [days]
0
0,01
0,02
0,03
0,04
0,05
0,06
Ecc
entr
iciti
es o
f sec
ond
plan
et
barycentric
Jacobirelative
Eccentricities of second planet
Rysunek 6.3: Krótkoskalowe zmiany półosi (górne panele) i mimośrodów orbitw czasie. Wartości parametrów dla układu hipotetycznego z rozdziału 4.1.
43

10000 20000 30000 40000 50000 60000 70000 80000 90000 1e+05time [years]
0,8
0,9
1
1,1
sem
i-m
ajor
axe
s of
firs
t pla
net [
AU
]
barycentric
Jacobirelative
Semi-major axes of first planet
10000 20000 30000 40000 50000 60000 70000 80000 90000 1e+05time [years]
4,7
4,8
4,9
5
sem
i-m
ajor
axe
s of
sec
ond
plan
et [A
U]
barycentric
Jacobirelative
Semi-major axes of second planet
10000 20000 30000 40000 50000 60000 70000 80000 90000 1e+05time [years]
0,2
0,25
0,3
Ecc
entr
iciti
es o
f fir
st p
lane
t
barycentric
Jacobirelative
Eccentricities of first planet
10000 20000 30000 40000 50000 60000 70000 80000 90000 1e+05time [years]
0,01
0,02
0,03
0,04
0,05
0,06
Ecc
entr
iciti
es o
f sec
ond
plan
et
barycentric
Jacobirelative
Eccentricities of second planet
Rysunek 6.4: Długoskalowe zmiany półosi (górne panele) i mimośrodów orbitw czasie. Wartości parametrów dla układu hipotetycznego z rozdziału 4.1.
44

Rysunek 6.5: Układ z symulacji 1 (rozdział 6.3.1). Różnice półosi pierwszej(po lewej stronie) i drugiej (po prawej stronie) planety we współrzędnych (odgóry do dołu): Jacobiego, barycentrycznych i względnych.
45

Rysunek 6.6: Układ z symulacji 1 (rozdział 6.3.1). Różnice mimośrodu pierw-szej (po lewej stronie) i drugiej planety we współrzędnych (od góry do dołu):Jacobiego, barycentrycznych i względnych.
46

Rysunek 6.7: Układ z symulacji 1 (rozdział 6.3.1). Różnice argumentu pery-centrum pierwszej (po lewej stronie) i drugiej planety we współrzędnych (odgóry do dołu): Jacobiego, barycentrycznych i względnych.
47

Rysunek 6.8: Układ z symulacji 1 (rozdział 6.3.1). Różnice anomalii średniejpierwszej (po lewej stronie) i drugiej planety we współrzędnych (od góry dodołu): Jacobiego, barycentrycznych i względnych.
48

Rysunek 6.9: Układ z symulacji 2 (rozdział 6.3.2). Różnice półosi pierwszej(po lewej stronie) i drugiej (po prawej stronie) planety we współrzędnych (odgóry do dołu): Jacobiego, barycentrycznych i względnych.
49

Rysunek 6.10: Układ z symulacji 2 (rozdział 6.3.2). Różnice mimośrodupierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
50

Rysunek 6.11: Układ z symulacji 2 (rozdział 6.3.2). Różnice argumentu pery-centrum pierwszej (po lewej stronie) i drugiej (po prawej stronie) planety wewspółrzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
51

Rysunek 6.12: Układ z symulacji 2 (rozdział 6.3.2). Różnice anomalii średniejpierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
52

Rysunek 6.13: Układ z symulacji 3 (rozdział 6.3.3). Różnice półosi pierwszej(po lewej stronie) i drugiej (po prawej stronie) planety we współrzędnych (odgóry do dołu): Jacobiego, barycentrycznych i względnych.
53

Rysunek 6.14: Układ z symulacji 3 (rozdział 6.3.3). Różnice mimośrodupierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
54

Rysunek 6.15: Układ z symulacji 3 (rozdział 6.3.3). Różnice argumentu pery-centrum pierwszej (po lewej stronie) i drugiej (po prawej stronie) planety wewspółrzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
55

Rysunek 6.16: Układ z symulacji 3 (rozdział 6.3.3). Różnice anomalii średniejpierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
56

Rysunek 6.17: Układ z symulacji 4 (rozdział 6.3.4). Różnice półosi pierwszej(po lewej stronie) i drugiej (po prawej stronie) planety we współrzędnych (odgóry do dołu): Jacobiego, barycentrycznych i względnych.
57

Rysunek 6.18: Układ z symulacji 4 (rozdział 6.3.4). Różnice mimośrodupierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
58

Rysunek 6.19: Układ z symulacji 4 (rozdział 6.3.4). Różnice argumentu pery-centrum pierwszej (po lewej stronie) i drugiej (po prawej stronie) planety wewspółrzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
59

Rysunek 6.20: Układ z symulacji 4 (rozdział 6.3.4). Różnice anomalii średniejpierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
60

Rysunek 6.21: Układ z symulacji 5 (rozdział 6.3.5). Różnice półosi pierwszej(po lewej stronie) i drugiej (po prawej stronie) planety we współrzędnych (odgóry do dołu): Jacobiego, barycentrycznych i względnych.
61

Rysunek 6.22: Układ z symulacji 5 (rozdział 6.3.5). Różnice mimośrodupierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
62

Rysunek 6.23: Układ z symulacji 5 (rozdział 6.3.5). Różnice argumentu pery-centrum pierwszej (po lewej stronie) i drugiej (po prawej stronie) planety wewspółrzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
63

Rysunek 6.24: Układ z symulacji 5 (rozdział 6.3.5). Różnice anomalii średniejpierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
64

Rysunek 6.25: Układ z symulacji 6 (rozdział 6.3.6). Różnice półosi pierwszej(po lewej stronie) i drugiej (po prawej stronie) planety we współrzędnych (odgóry do dołu): Jacobiego, barycentrycznych i względnych.
65

Rysunek 6.26: Układ z symulacji 6 (rozdział 6.3.6). Różnice mimośrodupierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
66

Rysunek 6.27: Układ z symulacji 6 (rozdział 6.3.6). Różnice argumentu pery-centrum pierwszej (po lewej stronie) i drugiej (po prawej stronie) planety wewspółrzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
67

Rysunek 6.28: Układ z symulacji 6 (rozdział 6.3.6). Różnice anomalii średniejpierwszej (po lewej stronie) i drugiej (po prawej stronie) planety we współ-rzędnych (od góry do dołu): Jacobiego, barycentrycznych i względnych.
68

Bibliografia
[1] D. Charbonneau, T. M. Brown, D. W. Latham, and M. Mayor. Detectionof Planetary Transits Across a Sun-like Star. The Astrophysical JournalLetters, 529:L45–L48, January 2000.
[2] K. Goździewski, M. Konacki, and A. J. Maciejewski. Where is the Se-cond Planet in the HD 160691 Planetary System? The AstrophysicalJournal, 594:1019–1032, September 2003.
[3] K. Goździewski and A. J. Maciejewski. The Janus Head of the HD 12661Planetary System. The Astrophysical Journal Letters, 586:L153–L156,April 2003.
[4] M. Jaroszyński and B. Paczyński. A Possible Planetary Event OGLE-2002-BLG-055. Acta Astronomica, 52:361–367, December 2002.
[5] S. Jha, D. Charbonneau, P. M. Garnavich, D. J. Sullivan, T. Sullivan,T. M. Brown, and J. L. Tonry. Multicolor Observations of a PlanetaryTransit of HD 209458. The Astrophysical Journal Letters, 540:L45–L48,September 2000.
[6] M. Konacki, A. J. Maciejewski, and A. Wolszczan. Improved TimingFormula for the PSR B1257+12 Planetary System. The AstrophysicalJournal, 544:921–926, December 2000.
[7] M. Mayor, D. Queloz, G. Marcy, P. Butler, R. Noyes, S. Korzennik,M. Krockenberger, P. Nisenson, T. Brown, T. Kennelly, C. Rowland,S. Horner, G. Burki, M. Burnet, and M. Kunzli. 51 Pegasi. InternationalAstronomical Union Circular, 6251:1–+, October 1995.
[8] B. Paczyński. Gravitational Microlensing in the Local Group. AnnualReview of Astronomy and Astrophysics, 34:419–460, 1996.
[9] S. Seagroves, J. Harker, G. Laughlin, J. Lacy, and T. Castellano. Detec-tion of Intermediate-Period Transiting Planets with a Network of Small
69

Telescopes: transitsearch.org. The Publications of the Astronomical So-ciety of the Pacific, 115:1355–1362, December 2003.
[10] A. Wolszczan. Two Planets Around a 6.2-ms Pulsar 1257 + 12? Bulletinof the American Astronomical Society, 23:1347–+, September 1991.
[11] A. Wolszczan and D. A. Frail. A planetary system around the millise-cond pulsar PSR1257 + 12. Nature, 355:145–147, January 1992.
70