WYKŁAD DLA KIERUNKU MECHANIKA I BUDOWA · PDF fileMECHANIKA I BUDOWA MASZYN 1. 1. Analiza...
434
WYKŁAD DLA KIERUNKU MECHANIKA I BUDOWA MASZYN 1
Transcript of WYKŁAD DLA KIERUNKU MECHANIKA I BUDOWA · PDF fileMECHANIKA I BUDOWA MASZYN 1. 1. Analiza...

WYKŁAD DLA KIERUNKUMECHANIKA I BUDOWA MASZYN
1

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
2

3
U K Ł A D Y M E C H A N I C Z N E:
Grupa I Elementy składowe nie przemieszczają się względem
siebie
konstrukcja nośna dachu hali,
wieża stalowa, most, korpus maszyny
Grupa II Elementy składowe przemieszczają się względem siebie
układ korbowy silnika spalinowego
zawieszenie koła samochodu, samolotu
schody ruchome
wysięgnik koparki, ładowarki
robot

4
UKŁADY KINEMATYCZNE:
MECHANIZMY MASZYN I URZĄDZEŃ,
POJAZDÓW, ROBOTÓW
(MANIPULATORY), …

5
Kurs ma nauczyć:
budowy i działania układów kinematycznych
metod analizy – opisu własności kinematycznych i dynamicznych
budowy i własności wybranych mechanizmów
Wiedza PRZYDATNA do:
projektowania, konstruowania i eksploatowania

6
Poszczególne działy TMiM:
struktura układów kinematycznych (el. składowe, połączenia,
własności ruchowe),
kinematyka (wyznaczanie parametrów ruchu)
dynamika
równowaga statyczna i kinetostatyczna (siły masowe ,siły w
połączeniach, siły napędzające, tarcie, sprawność),
badanie ruchu układów masowych

7

8

9

10
układ mechaniczny
sterowanie

11
SILNIKPRZEKŁ.
GŁÓWNA
PRZEKŁ.
RÓŻNICOWA
Schematyzacja

12
Schematyzacja

13
Schematyzacja

14
Schematyzacja

15
l
Własności

16
CZŁONY – elementy składowe układu kinematycznego

17
CZŁONY – elementy składowe układu kinematycznego
PRZEMIESZCZAJĄ SIĘ WZGLĘDEM SIEBIE

18

19
Klasy parf=5 → para V klasy
f=4 → para IV klasy
f=3 III
f=2 II
f=1 I
f=0 ???
f=6 ???

20

21
Pary kinematyczne układów płaskich

22
Pary kinematyczne układów płaskich

23
Pary kinematyczne układów płaskich

24
PARY:
WYŻSZE - styk punktowy lub liniowy
NIŻSZE: styk powierzchniowy
RODZAJ STYKU DECYDUJE O MOŻLIWOŚCI PRZENOSZENIA
DUŻYCH/MAŁYCH SIŁ W KONTAKCIE DWÓCH CZŁONÓW
Mechanizmy w których człony są połączone wyłącznie parami niższymi
nazywane są mechanizmami dźwigniowymi
Przykłady mechanizmów dźwigniowych ? (duże siły)

25
W=1

26
W=2

27

28
0
1
2
k
n = k + 1

29
Ruchliwość układów płaskich (2D):
Oznaczenia:
k – liczba członów ruchomych
n = k + 1 – wszystkie człony
p1 – liczba par I klasy,
p2 – liczba par II klasy
0
1
2
k
n = k + 1

30
Ruchliwość układów płaskich (2D):
0
1
2
k
n = k + 1
człon ma 3 stopnie swobody
k członów ma 3k = 3(n-1) stopni
swobody
utworzenie pary kinematycznej i-tej
klasy odbiera (3-i) stopni swobody

31
Układy płaskie (2D)
21 1213 ppnWT
54321 1234516 pppppnWT
Układy przestrzenne (3D)
TW RUCHLIWOŚĆ TEORETYCZNA !!!

32

33
1
1
2
2
2
1
TW
p
p
k
W = ?

34
1RW
W = ?
TW
21 ,, ppk

35
1TW 2TW
PORÓWNANIE

36
RUCHLIWOŚĆ LOKALNA
2TW
12
1
LTR
R
WWW
W

37
CZY JEST RUCH?

38
Szczególna geometria: człon BC prostoliniowy
011
0
LTR
R
WWW
W
Układ można
zmontować w 4
konfiguracjach
Jakich?

39
LTR WWW

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
40

41
00;6;5 21 TWppn
1RW?

42
BLTR WWWW
Więzy bierne – dodatkowe, zbędne
kinematycznie ograniczenia ruchuBW

43
UKŁAD NIERACJONALNY

44
14 RT WW
UKŁAD NIERACJONALNY – Z WIĘZAMI BIERNYMI
5041 BLTR WWWW

45

46
13 RT WW
4031 BLTR WWWW4BW

47
00 00h

48
00 00h 01 h01

49
Warunki ruchu
(geometria!)
UKŁAD Z WIĘZAMI BIERNYMI -
NIERACJONALNY

50
Modyfikacja struktury tak, aby:
WB = 0, brak więzów biernych,
WL = 0, brak ruchliwości lokalnych
wirnik powinien tworzyć z podstawą dwie pary
kinematyczne2 ip

51
WT = 6k -5p1 -4p2 -3p3 -2p4 -1p5
1 = 61 -50 -41 -30 -20 -11
1 = 61 -50 -40 -31 -21 -10

52
Rozwiązanie: k = 1, p3 = 1, p4 = 1
UKŁAD BEZ WIĘZÓW BIERNYCH - RACJONALNY

53
tarcie,
brak
poślizgu
Przekładnia cierna

54
tarcie,
brak
poślizgu
1001
032231
BLTR
TR
WWWW
WW
Przekładnia cierna

55
tarcie,
brak poślizgu
R
r
L
Warunek ruchu: L = R+r
Co gdy L > r+R ?
Co gdy L < r+R ?

56
WT =
BW
Racjonalne rozwiązanie?

57
4 x R (I klasa)

58
WNIOSKI:
Odstępstwo od tej zasady może być tylko świadome!!!
Ruch układu z więzami biernymi jest możliwy tylko dla szczególnych
warunków geometrycznych
Odchyłki wymiarów liniowych i kątowych zawsze skutkują kłopotami
montażowymi, dodatkowymi siłami, obniżeniem trwałości układu
kinematycznego
SĄ WIĘC NIERACJONALNE STRUKTURALNIE
W praktyce należy projektować układy racjonalne

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
59

60
położenia (konfiguracja) układu ↔
prędkość ↔ przyspieszenie

61
2
2vv
dt
sd
dt
dsa
dt
dss KK
KKK
KK
przemieszczeniu liniowemu sK(t) punktu K odpowiadają
prędkość i przyspieszenie liniowe
2
2
dt
d
dt
d
dt
d kkkk
kkk
przemieszczeniu kątowemu k(t), członu k odpowiadają
prędkość i przyspieszenie kątowe

62
METODY ANALIZY KINEMATYCZNEJ
graficzne
analityczne
numeryczne
Po co kinematyka?
wstępny etap projektowania
nie ma dynamiki bez kinematyki !!!

63
A
B
C
D
Podziałka długości:
mm
m
BC
BCl
100
1
)(
PODZIAŁKI RYSUKOWE

64
Podziałka siły:
mm
N
F
FF 1
100
100
)(

65
PODZIAŁKI OGÓLNIE
)(i
ii wielkość rzeczywista
wielkość rysunkowa
mm
ms
)v(
v -1
vPodziałka prędkości
mm
ms
)a(
a -2
aPodziałka przyspieszenia

66
A
BC
D
j
M
RYSOWANIE POŁOŻEŃ

67
A
BC
D
C*
j
M

68
A D
B
B1
C
E
F
Położenie - konfiguracja układu Człon AB obraca się do AB1
Co z pozostałymi członami?

69
A D
B
B1
C
E
F
trajektorie niektórych punktów są oczywiste

70
A D
B
B1
C
E
F
C1
F1
E1
Człony nie zmieniają wymiarów (sztywne)

71
Położenie - konfiguracja układu
A D
B C
E
F F1
R=EF
Przemieszcza się suwak: F → F1
Co z pozostałymi członami?

72
A D
B
C
E
F
F1
tor E - E

73
A D
B
C
E
F
F1
tor E - E
R=EF

74
A D
B
C
E
F
F1
E1 tor E - E
R=EF

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
75

76
METODY WEKTOROWE,
GRAFICZNE

77
Dwa człony – ruch płaski

78
A
Bv
B
AAv
k
{0}
0
B
v styczne do toru

79
ruch płaski ruch obrotowy

80
k0
B
k0
A
BS
v
AS
vk
ktgj
)(BS
)(v
)(AS
v
k0
B
k0
A

81
B
a
A
b
vA = vB vBA=vAB=0
SAB
{0}
2 człony ruchome
liczba śr. obrotu:
2
1
2
nnni KAŻDY Z KAŻDYM !

82
6
2
144
i
23
1312
030201
S
SS
SSS

83
13
02
S
S
23
12
0301
S
S
SSpary kin.
???

84
VB
VC
S20

85
1, 2, 0 S12 i S10 S20
3, 2, 0 S32 i S30 S20

86
twierdzenie o trzech
śr obrotu:
trzy człony j, k, l trzy
środki obrotu Sjk Sjl Skl
leżące na jednej prostej

87
3010 SiS
2312 SiS13S

88
0
13
2
M

89
0
13
2
10
21
32
M
30

90
0
13
2
10 30
21
32
20
31
M
10
3010 SiS
3221 SiS31S
.......... SiS
.......... SiS20S

91
0
13
2
10 30
21
32
20
31
M
VM
10

92
Równania wektorowe
plan prędkości
plan przyspieszeń

93
0t
(2D) – punkty M i N – jeden człon

94
NMMN vvv
MNkNM rωv
t
NM
n
NMMNMMN aaaaaa
MNkMNkk
n
NM rrωωa2
MNk
t
NM rεa

95
A
B
C
K
D0
1
2
31const
ABωv 1B1B ABωv
T2R

96
A
B
C
K
D0
1
2
31constkvC
kvCB
CBBC vvv
kvCBkvC
vB vCB
vCpv
c
b

97
A
B
C
K
D0
1
2
31const
kvKB
kvKC
KCCKBB
KCCK
KBBK
vvvv
vvv
vvv
vB
vCB
vCpv
c
b
k
kvKC
kvKBvKB
vK

98
.kc
KC
bk
BK
bc
BC
ΔbckΔBCK
const
~
A
B
C
K
D0
1
2
31const
kvKB
kvBC
kvKC
kvCB
vB
vCB
vCpv
c
b
k
kvKC
kvKBvKB
vK
PODOBIEŃSTWO
członu BCK i planu bck

99
A
B
C
K
D0
1
2
31const
t
B
n
BB aaa

100
A
B
C
K
D0
1
2
31const
AB
vABωa)(
2
B2
1
n
B11
n
B ABωωa
0AB0ABεa 1
t
B1
t
B ABεa

101
A
B
C
K
D0
1
2
31const
Ca
t
CBa
c
b
Cka
Ban
CBa
CBa
t
CBka
n
CBka
pa
t
CB
n
CB
n
BC
CBBC
aaaa
aaa
CB
va
2
CBn
CB

102
ΔbckΔBCK~
PODOBIEŃSTWO
członu i planu a
A
B
C
K
D0
1
2
31const
Ca pac
bk
Ba

103
(2D) – punkty J i K - dwa człony j, k
KJJK vvv
ρωv k
j
KJ

104
C
KJ
t
KJ
n
KJJKJJK aaaaaaa
ρρωωa2
k
j
k
j
k
jn
KJ
ρεa k
jt
KJ
KJj
C
KJ vωa 2

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
105

106
OPIS KINEMATYKI
(RÓWNANIA – NA POŁOŻENIA, PRĘDKOŚCI I
PRZYSPIESZENIA)
OTRZYMUJE SIĘ M.IN. W OPARCIU
O W I E L O B O K W E K T O R Ó W,
KTÓRY ZASTĘPUJE UKŁAD KINEMATYCZNY

107
a a sin
a cos
Rzuty wektorów

108
a
a sin
a cos

109
A
B C
D
yo
xo

110
A
B C
D
1
1, a
2, b
3, c
0, d 3
2
yo
xo
0cdba

111
Rzuty na osie x i y
0sinsinsin
0coscoscos
321
321
cba
cdba
A
B C
D
1
1, a
2, b
3, c
0, d 3
2
yo
xo

112
Rzuty na osie x i y
0sinsinsin
0coscoscos
321
321
cba
cdba
Dane: a, b, c, d oraz 1 Określić: 2 i 3

113
2
312
2
312
sinsinsin
coscoscos
cab
cdab
2
312
22
2
312
22
sinsinsin
coscoscos
cab
cdab

114
231
2
31
2
2
2
22
sinsincoscos
sincos
cacda
b
3131
31
2222
coscossinsin2
cos2cos2
ac
cdaddcab

115
ac
dcbak
c
dk
a
dk
2
2222
321
313131 coscoscossinsin
3131231 coscoscos kkk
Podstawienie

116
Podstawienie:
2tan1
2tan1
cos
2tan1
2tan2
sin32
32
3
32
3
3

117
02
tan2
tan 332
CBA
gdzie:
31211
31211
cos1sin2
coscos
kkkCB
kkkA
A
ACBB
2
4tan
2
213
2
rozwiązania

118
Podobna droga do 2
2
321
2
321
sinsinsin
coscoscos
cba
cdba
22
21
2
21 sinsincoscos cbadba
i tak dalej … wyznaczamy 2

119
0
1 3
2

120
0
1 3
2
0
1 3
2

121
0cdba 2 równania rzutów
A
B C
D
1
1, a
2, b
3, c
0, d 3
2
yo
xo

122
0sinsinsin
0coscoscos
321
321
cba
cdba
Równania rzutów = równania położeń:
Zmienne:
)(),(),( 321 ttt 1 zmienna niezależna
(napęd), np. )(1 t

123
0coscoscos
0sinsinsin
332211
332211
cba
cba
Równania prędkości – 1-sza pochodna po czasie
3,2,1
idt
di
ii

124
Uporządkowanie
0coscos
sinsin
cos
sin
3
2
32
32
1
1
1
cb
cb
a
a
1
1
1
1
32
32
3
2
cos
sin
coscos
sinsin
a
a
cb
cb
Gdy dane 1
znane wartości (liczby) dla
określonego położenia
odwracanie macierzy

125
Równanie prędkości
0sincos
sincossincos
0cossin
cossincossin
3
2
333
2
2
2221
2
111
3
2
333
2
2
2221
2
111
cc
bbaa
cc
bbaa
Równania przyspieszeń – 2-ga pochodna po czasie
3,2,12
2
idt
d
dt
di
iii
0coscoscos
0sinsinsin
332211
332211
cba
cba

126
0sinsin
coscos
coscos
sinsin
sincos
cossin
2
3
2
2
32
32
3
2
32
32
2
1
1
11
11
cb
cb
cb
cb
aa
aa
Uporządkowanie

127
2
1
1
11
11
2
3
2
2
32
32
1
32
32
3
2
sincos
cossin
sinsin
coscos
coscos
sinsin
aa
aa
cb
cb
cb
cb
Gdy dane 1 i 1

128
0,...,,,...,,,...,
...
0,...,,,...,,,...,
0,...,,,...,,,...,
111
11122
11111
mnkmm
mnk
mnk
xxqqwwff
xxqqwwff
xxqqwwff
0,, xqwf
w – wektor wymiarów członów (liniowych i kątowych),
q – wektor znanych współrzędnych wektorowych (zmienne niezależne,
napędy),
x – wektor nieznanych współrzędnych wektorowych (zmienne zależne)
R. wektorowe
R. rzutów na x, y

129
0],[ tt qxf
00
q
q
fx
x
ff
dt
d
Ax
f
m
mmm
m
x
f
x
f
x
f
x
f
x
f
x
f
...
...
...
21
1
2
1
1
1
Tmxx ...1x zmienne zależne

130
Bq
f
n
mmm
n
q
f
q
f
q
f
q
f
q
f
q
f
...
...
...
21
1
2
1
1
1
qBxA
Tnqq ...1q zmienne niezależne, napędy
qBAx 1 R. PRĘDKOŚCI

131
Tnqq ...1q
Tmxx ...1x
qBqBxAxA qBxA
qBqBxAAx 1
R. PRZYSPIESZEŃ

132
M
MM yxqq 21,

133
0qcba 2 0sinsinsin
0coscoscos
2211
2211
xqxbqa
xqcxbqa
M

134
M
0sinsinsin
coscoscos
2211
2211
2
1
xqxbqa
xqcxbqa
f
ff
q1, q2 - zmienne niezależne (znane wymuszenia),
x1, x2 – zmienne zależne (niewiadome),

135
221
221
coscos
sinsin
xqxb
xqxb
x
fA
0sinsinsin
coscoscos
2211
2211
2
1
xqxbqa
xqcxbqa
f
ff
Ax
f
m
mmm
m
x
f
x
f
x
f
x
f
x
f
x
f
...
...
...
21
1
2
1
1
1

136
0sinsinsin
coscoscos
2211
2211
2
1
xqxbqa
xqcxbqa
f
ff
Bq
f
n
mmm
n
q
f
q
f
q
f
q
f
q
f
q
f
...
...
...
21
1
2
1
1
1
21
21
sincos
cossin
xqa
xqa
q
fB

137
Txx 21x Tqq 21q
qBAx 1
2
1
21
21
1
221
221
2
1
sincos
cossin
coscos
sinsin
q
q
xqa
xqa
xqxb
xqxb
x
x
Równanie prędkości

138
221
221
coscos
sinsin
xqxb
xqxb
x
fA
2222211
2222211
sincossin
cossincos
xqxxqxbx
xqxxqxbx
dt
d
AA

139
21
21
sincos
cossin
xqa
xqa
q
fB
2211
2211
cossin
sincos
xxqaq
xxqaq
dt
d
BB

140
Txx 21, x
Tqq 21, q
qBqBxAAx 1
Równanie przyspieszeń

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
141

142
MECHANIZMY ROBOTÓW
M A N I P U L A T O R Y

143
ROBOT JAKI JEST, KAŻDY WIDZI
układ mechaniczny
sterowanie

144
CZUJNIKI
CZUJNIKI
OTOCZ.JEDN.
STERUJ. NAPĘDY MANIP. EFEKTOR
układy mechaniczne

145
ZASTOSOWANIA:
PRACA W SRODOWISKU NIEBEZPIECZNYM:
•PROMIENIOWANIE, SKAŻENIE
•ZAGROŻENIE EKSPLOZJĄ (POLICJA, WOJSKO)
•WYSOKIE CIŚNIENIE, GŁĘBIA
UCIĄŻLIWE I POWTARZALNE OPERACJE TECHNOLOGICZNE
•MONTAZOWE, SPAWALNICZE, OBRÓBCZE, ...
MEDYCYNA, OCHRONA ZDROWIA
•REHABILITACJA
•ZABIEGI OPERACYJNE
•OPIEKA NAD NIEPEŁNOSPRAWNYMI i … inne

146
MANIPULATOR
KOPIUJĄCY
-małe siły (napędza operator),
- małe odległości (długi
łańcuch kinemat błędy)
servo
compute
r

147
servo
compute
r
operator steruje za pomocą
przycisków (brak „czucia”)

148
Serwonapędy – operator
„czuje” siłę
servo
compute
r

149
servo
compute
r
Robot współczesny

150

151

152
EFEKTOR
KORPUS
RUCHY
LOKALNE
RUCHY
REGIONALNE
LOKOMOCJA
Robot
przemysłowy
Struktura

153
Rozwiązania możliwe (układy 3D, uniwersalne)
x,y,z – pozycja efektora (3
st. swobody)
, , – orientacja efektora (3 st.
swobody)
Wymagana ruchliwość:
W = 3 + 3 (+ 1 na chwyt)

154
schemat ogólny, tylko pary 1 kl: R i/lub T
A
B
C
A T T T R T R R R
B T T R R R T T R
C T R R R T T R T
3T 2TR T2R 3R TRT R2T RTR 2RT

155
3T

156
3T
2TR

157
3T
2TR
3R

158
Manipulatory o strukturze:
szeregowejrównoległej

159
TTT

160
RTT

161
RRT

162
SCARA
RRR

163
W=1
W=2
W=3

164
STREFA ROBOCZA

165
Kąt i współczynnik serwisu
kąt serwisu:
współczynnik serwisu:
S
sk
p
4
10 k

166
k = 1

167
k = 1
k = 0

168
Manewrowość (redundancja)
Ruchliwość po unieruchomieniu efektora (chwytaka)

169
RRT
RRR
Układy płaskie W = 3

170
RTR
TRR

171
W = 3
pary R i/lub T

172

173

174

175
mechanizm i manipulator równoległy:
człony, pary kinematyczne, struktura oparta na
łańcuchach zamkniętych; jednakowe zjawiska
fizyczne, podobne metody analizy

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
176

177
orientacja
pozycjayxdane
,,,: 321

178
321
321342123112
321342123112
sinsinsin
coscoscos
aaay
aaax
Q
Q

179
321 ,,,
:
orientacja
pozycjayxdane

180
......... 321
321
321342123112
321342123112
sinsinsin
coscoscos
aaay
aaax
Q
Q
Dane: xQ, yQ

181

182j
k

183
j
k
M
M
jr
M
kr
k
jp

184
j
k
M
M
jr
M
kr
k
jp
kye kxe
k
j

185
k
j
M
k
k
j
M
jprRr
k
j
k
j
kx
j
sin
cose
k
j
k
j
ky
j
cos
sine
wersory
k
j
k
j
k
j
k
j
ky
j
kx
j
k
j
cossin
sincoseeRMacierz rotacji

186
k
j
k
j
M
k
M
k
k
j
k
j
k
j
k
j
M
j
M
j
y
x
y
x
y
x
cossin
sincos
k
j
k
j
k
j
k
j
T
k
j
j
k
k
j
cossin
sincos1RRR
Ik
j
k
j
k
j
k
j
k
j
k
j
k
j
k
j
k
j
k
j
10
01
cossin
sincos
cossin
sincos1RR

187
k
j
M
k
k
j
M
jprRr
M
k
k
j
M
j rAr Przekształcenie jednorodne

188
100
kpRA
j
k
j
k
j
100
cossin
sincos
k
j
k
j
k
j
k
j
k
j
k
j
k
j y
x
A
Tk
j
k
j
k
jT
k
jT
k
j
k
j yx pqwektor wsp. absolutnych

189
x0
y0
a1
2
a2
3
a3
4
Q
1
2
3
10
2
3
11
3
3
3
2
2
1
1
0
Q
Q
Q
Q
y
x
AAAy
x
1
0
1
34
3
3 a
y
x
Q
Q

190
x0
y0
a12
a23
a34
Q
1
2
3
10
2
3
100
0cossin
0sincos
11
11
1
0A

191
x0
y0
a12
a23
a34
Q
1
2
3
10
2
3
100
0cossin
sincos
22
1222
2
1
a
A

192
x0
y0
a12
a23
a34
Q
1
2
3
10
2
3
100
0cossin
sincos
33
2333
3
2
a
A

193
1100
0cossin
sincos
100
0cossin
sincos
100
0cossin
0sincos
1
3
3
33
2333
22
1222
11
11
Q
Q
Q
Q
y
xa
a
y
x

194
3213
0
Q (xQ, yQ)
03
3
Q
Q
y
x

195
x0
y0
a1
2
a2
3
a3
4
Q
1
2
3
10
2
3
11
3
3
3
2
2
1
1
0
Q
Q
Q
Q
y
x
AAAy
x
1
0
1
34
3
3 a
y
x
Q
Q

196
100
sinsincossin
coscossincos
2123112321321
2123112321321
3
0
aa
aa
A
1
0
1
34
3
0
a
y
x
Q
Q
A

197
1
0
1
34
3
0
a
y
x
Q
Q
A
Prędkość punktu Q

198
2121231112
32132134
sinsin
sin
aa
axQ
2121231112
32132134
coscos
cos
aa
ayQ
321

199
3
2
1
333231
232221
131211
jjj
jjj
jjj
y
x
Q
Q
1
...
...
sin
sinsin
sinsinsin
33
21
3213413
21233213412
21231123213411
j
j
aj
aaj
aaaj

200
3
2
1
J
Q
Q
y
x
J – jakobian manipulatora
ΘJV
VJΘ1
zadanie proste
zadanie odwrotne

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
201

202

203
k
j
M
k
k
j
M
jprRr
M{k}
{j}

204
k
j
M
k
k
j
M
jprRr
k
j
k
j
k
j
M
k
M
k
M
k
k
j
M
j
M
j
M
j
z
y
x
z
y
x
z
y
x
R
kz
j
ky
j
kx
j
k
jeeeR

205
kj
kj
kj
kx
j
xz
xy
xx
,cos
,cos
,cos
e
T
kz
j
T
ky
j
T
kx
j
T
k
j
k
j
j
k
e
e
e
RRR1
kosinusy kierunkowe
transponowanie tożsame z
odwracaniem

206
100
010
001
z
j
y
jj
T
kz
j
T
ky
j
T
kx
j
k
j
j
k
kkkx eee
e
e
e
IRR

207
100
010
001
z
j
y
jj
T
kz
j
T
ky
j
T
kx
j
k
j
j
k I kkkx eee
e
e
e
RR
1kx
jT
kx
jee
0kx
jT
ky
jee
0ky
jT
kx
jee
1ky
jT
ky
jee
...
...
.........

208
1kx
jT
kx
jee
0kx
jT
ky
jee
0kx
jT
kz
jee
0ky
jT
kx
jee
1ky
jT
ky
jee
0ky
jT
kz
jee
0kz
jT
kx
jee
0kz
jT
ky
jee
1kz
jT
kz
jee
abbaTT

209
1kx
jT
kx
jee 0ky
jT
kx
jee
1ky
jT
ky
jee
0kz
jT
kx
jee
0kz
jT
ky
jee
1kz
jT
kz
jee
9 elementów macierzy rotacji jest powiązanych 6-ma równaniami
tylko 3 są niezależne

210
k
j
M
k
k
j
M
jprRr
M
k
k
j
M
j rAr
1101
M
k
M
k
M
k
k
j
k
j
k
j
k
j
M
j
M
j
M
j
z
y
x
z
y
x
z
y
x
R

211
10001000
k
j
kz
j
ky
j
kx
j
k
j
k
j
k
j peeepRA
Macierz transformacji odwrotnej
10
1
j
k
j
k
j
k
j
k
k
j
j
k
z
y
x
RAA

212
{j}
{k}
k
j p
j
k p
k
jT
k
j
k
j
j
k
j
k pRpRp

213
k
jT
kz
j
k
jT
ky
j
k
jT
kx
j
k
j
T
kz
j
T
ky
j
T
kx
j
k
jT
k
j
pe
pe
pe
p
e
e
e
pR
k
jT
k
j
k
j
j
k
j
k pRpRp
10
1
k
jT
kz
j
k
jT
ky
j
k
jT
kx
j
j
k
k
j
j
k
pe
pe
pe
RAA

214
100010
k
j
kz
j
ky
j
kx
j
k
j
k
j
k
j peeepRA
Postać ogólna

215
{j}
k
j p{k}
1000
100
010
001
:
k
j
k
j
k
j
k
j
k
j
z
y
x
transl pA

216
{j}
z
x
y
Z
1000
0100
00cossin
00sincos
,:zz
zz
zk
j zrotA

217
{j}
z
x
y
y
1000
0cos0sin
0010
0sin0cos
,:yy
yy
yk
j yrotA

218
{j}
z
x
y
1000
0.............0
0.............0
0001
,: xk
j xrotA
UZUPEŁNIJ

219
1000
0cossin0
0sincos0
0001
,:xx
xx
xk
j xrotA

220

221

222
1000
100
010
001
k
j
k
j
k
j
z
y
x
k
j ptransl :

223
1000
02
cos02
sin
0010
02
sin02
cos
2,:
pp
pp
pyyrot

224
1000
02
cos2
sin0
02
sin2
cos0
0001
2,:
pp
pp
pxxrot

225
1000
02
cos2
sin0
02
sin2
cos0
0001
1000
02
cos02
sin
0010
02
sin02
cos
1000
100
010
001
pp
pp
pp
pp
k
j
k
j
k
j
k
j
z
y
x
A
1000
0010
0100
0001
1000
0001
0010
0100
1000
100
010
001
k
j
k
j
k
j
k
j
z
y
x
A

226
1000
001
100
010
k
j
k
j
k
j
k
j
z
y
x
A
Weryfikacja!
WYNIK MNOŻENIA

227
BAAB
składanie transformacji nie jest przemienne, a więc
uzyskanie poprawnej transformacji złożonej
wymaga zachowania odpowiedniej kolejności
transformacji elementarnych oraz dokonywania ich
w kolejnych pośrednich układach współrzędnych

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
228

229
po raz pierwszy opublikowana w pracy:
Denavit J., Hartenberg R.S.: A Kinematic Notation for
Lower Pairs Mechanisms Based on Matrices.
Transactions of ASME, Journal of Applied Mechanics,
Vol.22, 1955

230
W układach kinematycznych pary R, T, C, S i inne

231
Pary C, S (i inne) można zawsze zastąpić
przez łańcuch złożony z członów
połączonych tylko parami R i T

232
W układach zawierających wyłącznie pary obrotowe R i postępowe T
można poszczególnym członom przypisać lokalne układy
współrzędnych kierując się dwiema zasadami:
osie zj poszczególnych układów są zawsze
poprowadzone wzdłuż osi par wyznaczających
odpowiednio kierunek przesuwu (dla pary T) lub oś
obrotu (dla pary R),
osie xj poszczególnych układów są zawsze
poprowadzone w taki sposób, aby były prostopadłe
do osi zj+1 układu kolejnego

233
kkzrot
kd
kztransl
jjxrot
ja
jxtransl
kA
jtransf ::::)(

234
kkzrot
kd
kztransl
jjxrot
ja
jxtransl
kA
jtransf ::::)(

235
kkzrot
kd
kztransl
jjxrot
ja
jxtransl
kA
jtransf ::::)(

236
całkowita transformacja będzie zależna od tylko czterech
parametrów zaangażowanych w kolejne transformacje elementarne:
odległość aj pomiędzy osiami zj oraz zk,
kąt j zwichrowania osi zj oraz zk,
odległość dk początku układu {k} od osi xj mierzonej wzdłuż osi zk,
kąt k orientacji osi xk względem xj obróconej względem osi zk
PARAMETRY D-H

237
kkzrot
kd
kztransl
jjxrot
ja
jxtransl
kA
jtransf ::::)(
1000
0100
00cossin
00sincos
1000
100
0010
0001
1000
0cossin0
0sincos0
0001
1000
0100
0010
001
kk
kk
kjj
jj
j
k
j
d
a
A

238
1000
coscoscossinsinsin
sinsincoscossincos
0sincos
jkjkjkj
jkjkjkj
jkk
k
j
d
d
a
A
1000
cossin0
sincossincoscossin
cossinsinsincoscos
1
kjj
kjkjkjk
kjkjkjk
k
j
j
k
d
a
a
AA

239
T
kkjjk
j da A
ZMIENNA

240
1000
coscoscossinsinsin
sinsincoscossincos
0sincos
jkjkjkj
jkjkjkj
jkk
k
j
d
d
a
A
T
kkjjk
j da A
JEDNA ZMIENNA

241
T
kkjjk
j da A
ZMIENNA

242
la
1
2
0
M
lc
3

243
z1 z0
la
1
2
z3
z2
0
lc
3

244
la
lb
1
2
z1
z3
z2
x2
0
x0
z0
x1
lc
3x3
q2
q1
q3

245
la
lb
1
2
z1
z3
z2
x2
0
x0
z0
x1
lc
3x3
q2
q1
q3

246
0
0
0
270
0
0
0
0
3
3
2
2
2
1
1
1
0
3
0
q
l
a
AAAA
d
a
1000
0100
001
cos1
sin
001
sin1
cos
10 qq
A
1000
002
cos2
sin
0100
002
sin2
cos
21
A
1000
0100
003
cos3
sin
03
sin3
cos
32 qq
alqq
A

247
03
1 2 1 2 1 0
1 2 1 2 1 0
2 2 0 0
0 0 0 1
23
1 2 3 1 2 3 1 2 3 1 2 3 1 1 2
1 2 3 1 2 3 1 2 3 1 2 3 1 1 2
2 3 2 3 2 3 2 3 0 2
0 0 0 1
A
C C C S S
S C S S C
S CA
C C C C S S C C S C S C S la C C
S C C S S S S C S S S C C la S C
S C C S S S C C la S
TbcM ll 103 r M
T
zyxM rrr rAr3
3
00 1
iiii qsqc sincos

248
r l C C C C S S l S l C C
r l S C C S S S l C l S C
r l S C C S l S
x c b a
y c b a
z c a
1 2 3 1 2 3 1 1 2
1 2 3 1 2 3 1 1 2
2 3 2 3 2
Punkt M w układzie globalnym {0}

249
Prędkość (i przyspieszenie)

250
kZMIENNA
kdZMIENNA

251
kjkk ωq ,
1000
coscoscossinsinsin
sinsincoscossincos
0sincos
10 jkjkjkj
jkjkjkj
jkk
k
j
k
j
k
j
d
d
a
pRA

252
k
j
jjk
j
jk pRpppp00000
constk
j
k
j
jjk ppRpp 000
?00 jjdt
dRR
Tjkjkjk
j dda cossinp

253
jzjyjxj eeeR0000
jzjjyjjxj
jzjyjxjjdt
d
dt
d
eωeωeω
eeeRR
000000
00000
jxjjxdt
deωe
000
10 jxe
Pochodna wektora jednostkowego:

254
kz
j
jzjky
j
jyjkx
j
jxj
k
j
jzjjyjjxjk
j
j
ppp 000000
0000000
eωeωeω
peωeωeωpR
k
j
jjk
j
j pRωpR000
k
j
jjjk pRωpp0000
PRĘDKOŚĆ POCZĄTKU UKŁADU {k}
Tkz
j
ky
j
kx
j
k
j pppp

255
Iloczyn wektorowy
T
zyx
BT
zyx
B bbbaaa ba
...
xzzx
yzzy
B
BBB
baba
baba
c
cba

256
Tkkjk
jk
k
k
q
q
00000
,
Rωω
Prędkość kątowa k członu k jest sumą wektorową prędkości członu j
w układzie podstawy j i prędkości względnej k,j w parze obrotowej
Prędkość względna k,j jest mierzona wzdłuż osi zk a więc jej
wyrażenie w układzie podstawy wymaga transformacji z układu {k} do
podstawy {0} za pomocą macierzy rotacji 0Rk
PRĘDKOŚĆ KĄTOWA CZŁONU k W UKŁADZIE {0}
T
zkzkjk q 100000 eeRωω

257
k
j
jk
j
jjjk pRpRωpp 00000
k
j
jjk
j
jk pRpppp00000
kk dq
k
j
jk
j
jjk pRpRpp 0000

258
const
consta
qd
q
d
d
a
dt
d
j
j
kk
k
j
j
jk
jk
j
k
j
cos
sin
0
cos
sinp
k
j
jk
j
jjjk pRpRωpp 00000
Dla pary T, inaczej niż dla R, wektor jpk opisujący pozycję
{k} w {j} jest zmienny, a jego pochodna wynosi:

259
zk
j
jkjkj
jkjkj
kk
j
j eR
1
0
0
coscossinsinsin
sincoscossincos
0sincos
cos
sin
0
kzkkzk
j
jk
j
j qq eReRRpR000
k
j
jk
j q
cos
sin
0
p

260
kzkk
j
jjjk q eRpRωpp 00000
PRĘDKOŚĆ POCZĄTKU UKŁADU {k}
PRĘDKOŚĆ KĄTOWA CZŁONU k W UKŁADZIE {0}
jkjk ωωω 00
, 0

261
Prędkość punktu M na członie k-tym
M
k
kkM rRpr 000
M
k
kkkM rRωpr 0000
M
{0}
{k}

262
A teraz przyspieszenia ...

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
263

264
V M
M w w
SILNIK
ORGAN
ROBOCZY
Prze-
Kła-
dnia
= 1
w
wM
M
Przeniesienie ruchu z jednego wału na drugi
Zmiana momentu
Zmiana prędkości obrotowej

265
M 1 1
Dostarczamy
strumień mocy
M 2 2
Odbieramy
strumień mocy
h
zazębienie

266
Podział przekładni zębatych
h typ przekładni
0 h 0 walcowa
0 h 0 stożkowa
p/2 h 0 ślimakowa
0 h 0 śrubowa

267
jarzmo
osie stałe
osie
ruchome

268
PODST JARZMO
2 PODST

269

270
PRZEKŁADNIE ZĘBATE
Przekł. o osiach stałych Przekładnie obiegowe
Planetarne: W=1 Różnicowe i sumujące: W>1

271
Duże przełożenia przy zwartej budowie
Możliwość sumowania kilku napędów (W>1) – p.
sumujące
Zdolność przenoszenia dużych sił (mocy)
Możliwość rozdziału napędu na kilka odbiorników (W>1) –
p. różnicowe

272
Ciekawe trajektorie punktów kół obiegowych
Wysokie wymagania
dokładnościowe KOSZTY !!!

273
Koło obiegowe
Jarzmo
Koło centralneKoło centralne

274
satelita
Jarzmo
Koło słoneczneKoło słoneczne

275
Satelita 3
Satelita 1
Satelita 2
Potrojenie liczby par zazębień
duże moce i momenty
Zdolność przenoszenia dużych sił (mocy)

276
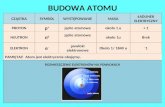
Moc: 750 kW, i = 8
Masa 87 kg Masa 1400 kg
Prz. zwykłe, szeregowe
Prz. obiegowe
(a- wykonanie specjalne)
420x320 610x520 850x510 1150x600

277
Możliwość rozdziału
Napędu
na kilka odbiorników (W>1)
– p. różnicowe

278

279po-ham.sam

280
po-line.sam

281
po-stop.sam

282
Zazębienie zewnętrzne

283
Zazębienie zewnętrzne
2
2
1
1
R
v
R
v
11
2
1
2
2
1
z
z
R
R
z
2
mR

284
Zazębienie wewnętrzne
2
2
1
1
R
v
R
v
11
2
1
2
2
1
z
z
R
R

285
1
2
J
A
B
2
J
vB J=AB M
S21
2=S MMv 21
2vB2R
22 R
JAB
2
2R
ABJ
21 RRAB
2
212
R
RRJ
2
21
2
2
1
2
1
2
1
mz
mzmzJ
2
212
z
zzJ

286
1
2
J
A
B
2
J
vB J=ABM
S20
2=S MMv 20
1
1=RCv
C
D1
Dv C=v
1
Bv.1 J
DC1 vv.2
podstawa)(0.3 20 S
Analiza prędkości – dwa napędy

287
1
23
J
1 J
3
J
1
2
widok z jarzma

288
1
23
J
1 J
3
J
1
2
widok z jarzma
Obroty wzgl.
podstawy (koło 3) Obroty wzgl. J
Koło 1 n1 n1J = n1 - nJ
Koło 2 n2 n2J = n2 - nJ
Koło 3 n3 = 0 n3J = n3 - nJ
Jarzmo nJ 0

289
3
J
1
2 i
Js
Ju
sJ
uJ zf
112
3
1
2
3
2
2
1
3
1
3
1
z
z
z
z
J
J
J
J
J
J
J
J
OSIE STAŁE

290
3
J
1
2
11
31
z
z
J
J
03
112
3
1
2
3
1
z
z
z
z
J
J
1
1
31
z
zJ

291
113
4
2
1
1
3
z
z
z
z
J
J
„Widziane” z jarzma:
01
Ponieważ:
23
413 1zz
zz
J
Wynik:
13
2 4
J
?3 J

292
50;99;51;101:Zał 4321 zzzz
5049
1
5199
5010113
J
13
2 4
J
?3 J

293
J
1
2
J
2
J
1
2
J 2

294
J
1
2
J 2
J
1
2
J 2

295

296
z1 = 202;
z2 = 200
i = 100
= 0,85

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
297

298
0),,~
,,,),(( wMFFFqf tt BC
Dynamika opisuje związki pomiędzy:
ruchem q(t),
siłami czynnymi FC, siłami biernymi FB,
siłami tarcia F,
masami członów wraz z ich rozłożeniem na
członach
czasem t i geometrią członów w
M~

299
SIŁY W UKŁADZIE
KINEMATYCZNYM

300
ODPOWIADA NA PYTANIA:
jaka siła czynna FC jest potrzebna, aby wywołać oczekiwany ruch
q(t)?
DYNAMIKA ODWROTNA = KINETOSTATYKA
jaki jest ruch układu przy znanych siłach czynnych FC i biernych
FB?
DYNAMIKA PROSTA

301
m
Z dmyxI )( 22
)( 22
SSSZ yxmII

302
aF mb
εM Sb I
00 bm FFaF
00 bSI MMεM

303
-100000
-80000
-60000
-40000
-20000
0
20000
40000
60000
80000
100000
0 0,004 0,008 0,012
czas [s]
Przysp. kąt
BC
20000
25000
30000
35000
40000
45000
50000
55000
60000
Przysp. p.S
m, J
A
C
B
S
BC = 0,2 m
1 = 500 s-1 (1 = const)
(n1 = 5000 obr/min)

304
m, J
A
C
B
S
aSmax = 55000 ms-2
Bcmax = 90 000 s-2
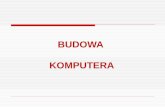
m=0,2 kg, J=0,01 kgm2
Fbmax = - ma = 11000 N !!!
Mbmax = - J = 900 Nm !!!

305
e
S
Fb
22
1
250
500
001,0
msea
s
me
S
kgm 1
NmaFb 25025STAT
b
F
F

306
ma
I
F
M
F
Mh S
b
b
M
b
SIŁA (Fb) i MOMENT (Mb) BEZWŁADNOŚCI
aF mb
εM Sb I

307
ASAS
t
S
2n
S
t
S
n
S
; aa
aaaS
S
A
B
aS
SS

308
ASAS
t
S
2n
S
t
S
n
S
; aa
aaaS
SI
m
εM
aF
b
Sb
S
S
b
b
ma
I
F
Mh
S
A
B
aS
SSW
Fb
h

309
S
A
B
aS
SSW
Fb
h
mAS
I
a
a
ASma
aI
a
a
ma
AS
aI
a
a
ma
I
a
ahSW
a
a
SW
h
S
t
S
S
S
t
SS
t
S
S
S
t
SS
t
S
S
S
S
t
S
S
S
t
S
cos(?)

310
S
A
B
aS
SSW
Fb
h
AS
i
mAS
mi
mAS
ISW SSS
22

311

312
MASY SKUPIONE
CZŁON MODEL

313
masa członu i modelu są jednakowemm
k
i 1
środki mas członu i modelu pokrywają się
k
Sii
k
Sii myymmxxm11
masowe mom. bezwł. członu i modelu są jednakowe
k
SSSiii Iyxmyxm1
2222 )()(

314
4 równania można wyliczyć 4 parametry opisujące układ mas
skupionych
k mas skupionych oznacza 3k parametrów
jedna masa skupiona opisana przez: m, x, y
spośród 3k parametrów można zatem przyjąć p
p = 3k - 4

315
m, IS
a b
m1 m2

316
SIbmam
bmam
mmm
2
2
2
1
21
21
0?,,,
:Parametry
21 bamm
a b
m1 m2
Po przyjęciu a wyznaczamy m1 , m2 oraz b

317

318
j
i
Fijx
Fijy
Para krzywkowa K – II klasy (p2)
znany kierunek
znany punkt przyłożenia
jedna niewiadoma: składowa Fijx lub Fijy

319
i
j
Fijx
Fijy
Para obrotowa R – I klasy (p1)
znany punkt przyłożenia
dwie niewiadome:
składowa Fijx
składowa Fijy

320
i
j
Fijx
Fijy
Para postępowa T – I klasy (p1)
znany kierunek
dwie niewiadome:
punkt przyłożenia
składowa Fijx lub Fijy

321

322
F1
F2
F3
F3
F1
F2

323
F3
F1
F2
F4c
F1
F2
c

324
F1
F2
c
F4
F3
F3
F1
F2
F4c

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
325

326
M=?
F
2
0
1

327
M=?
F
2
0
1
01202 FFF

328
01202 FFF
M=?
F
2
0
1

329
01202 FFF
M=?
F
2
0
1

330
M=?
F
2
0
1
F
F02F12
01202 FFF

331
M=?
F
2
0
1
F
F02F12
F02
F12

332
M=?
F
2
0
1
00121 FFF02
F12
F01
F21

33300 1211 MhFM A
M=?
F
2
0
1
00121 FFF02
F12
F01
F21
h1
A

334

335Q
S0
1
2
3
Sprężyna+tłumik

336
01232 FQF
Q
S0
1
2
3

337
00323 FF
Q
S0
1
2
3

338
QF12
F32
Q
S0
1
2
3
F12
F23
01232 FQF
00323 FF

339
Q
S0
1
2
3
00121 SFF
F21
F01
S

340
m, J
M1=?
3
0
2
1 1
Dane:
m, J – masa, masowy mom. bzwł.
1 – prędkość kątowa 1
M1 = ? oraz siły oddziaływania

341
2
Mb
a
Fb
maFb
JMb

342
ma
J
F
Mh
b
b
bM Para sił
bFbF h
2
Mb
a
Fb

343
2
Fb
a
2
Fb
Mb
Fb
a
Fb
h

344
M1
3
0
2
1
Fb
0
A
01232 FFF b
Człon 2:

345
M1
3
0
2
1
Fb
F03
c
F23
c
F12
c
0
A
01232 FFF b
00323 FF
Człon 2:
Człon 3:

346
M1
3
0
2
1
Fb
F30
c
F32
c
F12
c
F10
c
0
A
h1
c
F32
c
F12
c
00
0
12111
0121
hFMM A
FF

347
UKŁAD KINEMATYCZNY W RÓWNOWADZE
KAŻDY CZŁON W RÓWNOWADZE
DOWOLNIE WYDZIELONA GRUPA
CZŁONÓW W RÓWNOWADZE

348
j
i
Fijx
Fijy
i
j
Fijx
Fijy
i
j
Fijx
Fijy
1 NIEWIADOMA 2 NIEWIADOME 2 NIEWIADOME
Liczba równań = Liczba niewiadomych
3k = 2p1 + p2

349
21 1213 ppnWT
0123 21 ppk
Ruchliwość
Warunek statycznej
wyznaczalnośći grupy
k 1 2
...
4
p1 1 3
...
6
p2 1 0
...
0
(k-p1–p2) (1-1-1) (2-3-0) (460)
PRZYKŁADY GRUP STATYCZNIE WYZNACZALNYCH

350
grupa (1-1-1) grupa (2-3-0)
I kl - R lub T II kl - K lub J lub Z
I kl - R lub T

351
3
1
2
F12 F2
F32
F32 + F12 + F2 = 0

352
Grupy dwuczłonowe
RRR
RTR RTT
RRT
TR
T

353
Grupa RRR – układ sił
1
2
3
4
F2
F3
Ft12
Ft43
Fn43 Fn
12
A
B
C
h2
h3
0433212 FFFF
???

354
Grupa RRR – układ sił
1
2
3
4
F2
F3
Ft12
Ft43
Fn43 Fn
12
A
B
C
h2
h3
04343
321212
nt
nt
FF
FFFF
AB
t
AB
tB
l
hFF
lFhFM
2212
12222 00
BC
t
BC
tB
l
hFF
lFhFM
3343
43333 00

355
Grupa RRR – układ sił
1
2
3
4
F2
F3
Ft12
Ft43
Fn43 Fn
12
A
B
C
h2
h3
F2
Ft12
F3
Ft43
Fn
43
Fn
12
04343
321212
nt
nt
FF
FFFF

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
356

357
ss
dsFdL cossF
kąt - pomiędzy siłą F i przemieszczeniem ds
Praca momentu
dMdL cosΘM
Praca siły

358
Praca przygotowana (wirtualna) L odnoszona jest do tzw.
przemieszczeń przygotowanych r i
sFL cos sF
cosML ΘM

359
Zasada prac wirtualnych:
„Układ kinematyczny, w określonej konfiguracji
(położeniu), znajduje się w równowadze statycznej
lub quasi-statycznej, jeżeli suma prac
przygotowanych wykonana przez siły i momenty
zewnętrzne, w tym również przez siły i momenty
masowe, na odpowiadających im przemieszczeniach
przygotowanych jest równa zeru.”

360
0 j
jjk
k
k ΘMsF
j
jj
k
kk MsF 0coscos
j
jj
k
kkt
Mt
sF 01
cos1
cos

361
jjktt
s
1v
1k
j
jj
k
k MF 0cosvcos k

362
j
jj
k
k MF 0cosvcos k
M = aF
M
F
F
a
0vcos k k
kF

363

364
hFF cosv
warunek równowagi kinetostatycznej układu,
sprowadzony do zerowania się sumy mocy od sił
zewnętrznych można zapisać jako sumę
momentów sił przyłożonych do odpowiednich
punktów planu prędkości obróconych względem
bieguna tego planu
00cosv k
kk
k
kk hFF

365
Q
A
B
CF=?
odwrócony plan
prędkości
CBBC vvv
hQsF
FhQs
/
0
c
a
bF
Q
s
h
Przykład – met. graficzna

366
sFL cos rF
cosML ΘM
Praca przygotowana (wirtualna)

367
Przemieszczenia wirtualne są wariacjami funkcji.
Układ „zamrożony” więc czas jest stałą (t = const)
Jak różniczkowanie:
- postać jawna yy
zx
x
zztyxzz constt
,,
00,,,
z
z
fy
y
fx
x
ftzyxf constt
- postać uwikłana

368
Przykład – met. analityczna

369
cay
bax
K
K
sin
cos
cay
bax
K
K
sin
cos
cay
bax
K
K
sin
cos
cos
sin
ay
ax
K
K

370
0)(cos)(sin
M
F
Faa
y
x
yx FaFaM )(cos)(sin
0T
K M Fr

371
0
?
3
2
1
ey
ex
F
F
f
f
f
SIŁY CZYNNE
SIŁY EFEKTORAx0
y0
a12
a23
a34
Q
1
2
3
Fe
f1
f2
f3

372
0
?
3
2
1
ey
ex
F
F
f
f
f
Z zasady prac przygotowanych
0
03
2
1
321
ey
ex
QQ F
F
yx
f
f
f
e
TTQufΘ

373
ΘJuJ
3
2
1
Q
Q
y
x
TTTJΘu
e
TTQufΘ e
TTTQJΘfΘ
e
TQJf
J – jakobian manipulatora

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
374

375
Równania N-E RÓWNOWAGA SIŁ, BADANIE RUCHU

376
Równania Newtona-Eulera (2D)
y
x
S
y
x
a
a
I
m
m
M
F
F
00
00
00

377
3 równania dla 1 członu
łączna liczba równań jest wielokrotnością liczby członów
k członów ruchomych daje 3k równań dla płaskich

378
S1
S2
y0
x0
a
b
e
c d
f
h2
1
0
PRZYKŁAD

379
MF
S1
S2
y0
x0
a
b
e
c d
f
h2
1
0
siły zewnętrzne
02v FsignF

380
MF
F21
F01x
F01y
F02(1)
F02(2)
S1
S2
y0
x0
a
b
e
c d
f
h2
1
0
siły zewnętrzne + siły w parach
kinemat.

381
Dane:
wymiary, ruch (położenie, prędkość, przyspieszenie),
masy m1, m2 i masowy moment bezwładności I1,
siła oporu F
ZADANIE ODWROTNE DYNAMIKI
Zadanie:
określić M (napęd),
siły w parach kinematycznych
?)2(
02
)1(
02210101 T
yxx MFFFFFF

382
Dane:
wymiary, warunki początkowe ruchu (położenie, prędkość),
masy m1, m2 i masowy moment bezwładności I1,
siła oporu F, moment czynny M
Zadanie:
określić ruch (przyspieszenie prędkość położenie),
siły w parach kinematycznych
?)2(
02
)1(
02210101 T
yxx FFFFF F
ZADANIE PROSTE DYNAMIKI

383
?)2(
02
)1(
02210101 T
yxx FFFFF F
ZADANIE PROSTE DYNAMIKI
ZADANIE ODWROTNE DYNAMIKI
?)2(
02
)1(
02210101 T
yxx MFFFFFF

384
Współrzędne środka masy S1 członu 1
sin
cos
1
1
a
a
y
x
S
S
Prędkość i przyspieszenie ((t)):
cos
sin
1
1
a
a
y
x
S
S
sincos
cossin2
2
1
1
aa
aa
y
x
S
S

385
Dla członu 2
fbxS cos2
sin2 bxS
cossin 2
2 bbxS
022

386
Siły i momenty dla członu 1
cossin 2
12101 aamFF x
sincos 2
1101 aamgmF y
121
01
01sin
sin
cosIMabF
F
F
a
a
y
x
1210101 sincossin IMabFaFaF yx

387
Siły i momenty dla członu 2
02
2
221
v
cossin
FsignF
bbmFF
02
)2(
02
)1(
02 gmFF
0cos
cossin
)2(
02
)1(
0221
bfdcF
bfcFFhbheF

388
Porządkowanie do formy macierzowej
!!! dla zadania prostego !!!
xzn GFF
Fzn wektor sił znanych – obciążenia zewnętrzne, siły
odśrodkowe
G macierz, której elementy zawierają wyłącznie parametry
masowe i geometryczne,
Fx wektor wielkości nieznanych.

389
Tzn
FhgmbmF
Mamgmam
2
2
2
2
11
2
1
cos
sincos
F
coscos
0sin00
011000
sin00100
00sincossin
cos00010
sin00101
6564
6564
2
1
1
1
bfdcgbfcg
ggbhe
bm
Iabaa
am
am
G

390
znx FGF1
Tyxx FFFFF )2(
02
)1(
02210101F
PRZYSPIESZENIE
CZŁONU 1
PRĘDKOŚĆ PRZEMIESZCZENIE
CAŁKOWANIE
CAŁKOWANIE

391
skQq
E
q
E
dt
dk
kk
...,,2,1
skQ
q
E
q
E
dt
dk
kk
...,,2,1
skQq
E
q
E
dt
dk
kk
...,,2,1
E - energia kinetyczna układu,
każdej z s współrzędnych uogólnionych qk
przypisuje się siłę uogólnioną Qk (siła uogólniona –
przypisana współrzędnej uogólnionej)
Równania Lagrange’a

392
k
kpq
PQ
gdzie P jest energią potencjalną układu
Z siły Qk można wydzielić część Qkp od sił potencjalnych i
część Qkz pochodzącą od sił pozostałych
pierwsza z sił wyrażona jest równaniem

393
kz
kkk
P
q
E
q
E
dt
d
kolejna postać równania

394
czasem jest upraszczana
kz
kk
L
q
L
dt
d
po wprowadzeniu tzw. potencjału kinetycznego L w
postaci
PEL

395
DANE:
masy m1 i m2
masowe momenty bezwładności I1 i I2
wyprowadzić zależności opisujące
ruch układu przy znanych momentach
napędowych MC1 i MC2.
PRZYKŁAD

396
Dwie wsp. Uogólnione → dwa równania Lagrange’a
2,1
iQ
LL
dt
di
ii
Energia kinetyczna E i potencjalną P członu 1
2
11
2
1
2
1112
1
2
1 IamE
1111 sin gamP

397
Współrzędne środka masy członu 2
21211
21211
2
2
2sinsin
coscos
ab
ab
y
x
S
S
Sr
i prędkości
2122111
21221111
2
2
2coscos
sinsin
ab
ab
y
x
S
S
S
r

398
Energia kinetyczna i potencjalna członu 2
221222222
1
2
1 ImE S
T
S rr
2121122 sinsin abgmP
Podstawienia dla uproszczenia zapisu
1221
1221
coscos
sinsin
CC
SS
ii
ii

399
2
2122111
2
2122111122
coscos
sinsin
ab
abS
T
S
rr
12112112211
2
2
2
21
2
1122
2 CCSSba
abS
T
S
rr
z iloczynu skalarnego

400
Wykorzystując relację na sinus i cosinus sumy kątów
2121121 CCCSS
mamy
212211
2
2
2
21
2
1122 2 CbaabS
T
S rr

401
energia kinetyczna członu 2
2212
212211
2
2
2
21
2
1122
2
1
22
1
I
CbaabmE
energia potencjalna członu 2
1221122 SaSbgmP

402
potencjał kinetyczny L
PPEEL 121
122112111
2
212
212211
2
2
2
21
2
112
2
11
2
1
2
11
2
1
22
1
2
1
2
1
SaSbgmSgamI
Cba
abmIamL

403
212
21221
2
221
2
11
2111
2
11
1 22
222
2
1
ICba
abmIam
L
21221221221221
2
221
2
112
111
2
11
1
22
ISbaCbaabm
IamL
dt
d
Kolejne pochodne

404
2122121
2
2212
2
ICbaamL
212212212121
2
2212
2
ISbaCbaamL
dt
d

405
122112111
1
CaCbgmCgamL
12222122112
2
CgamSbamL

406
1122112111
212122
2
22122
22212
2
22
12212
2
2
2
121
2
11
2
2
CMCaCbgmCgam
SbamSbam
ICbaam
ICbaabmIam
równanie ruchu członu 1

407
21222
2
1212222
2
22
122122
2
22
CMCgam
SbamIam
ICbamam
równanie ruchu członu 2

1. Analiza strukturalna2. Więzy bierne i ich eliminacja3. Analiza kinematyczna4. Analiza kinematyczna c.d. – metody wektorowe5. Metody analityczne kinematyki6. Charakterystyka manipulatorów. Układy płaskie7. Kinematyka manipulatorów, jakobian8. Opis macierzowy układów przestrzennych9. Notacja Denavita-Hartenberga10. Przekładnie zębate obiegowe11. Wprowadzenie do dynamiki mechanizmów12. Analiza kinetostatyczna13. Analiza sił - metoda prac przygotowanych14. Badanie ruchu układów płaskich. Modele, redukcja sił i mas15. Nierównomierność biegu maszyny, sposoby regulacji
408

409
MECHANIZM O RUCHLIWOŚCI W=1
ZNANE OBCIĄŻENIA ZEWNĘTRZNE;
ZNANE MASY I MASOWE MOM.
BEZWŁADNOŚCI;
ZNANY STAN RUCHU W CHWILI t=0

410
model o ruchu postępowym T
mzr - masa zredukowana
Fzr - siła zredukowana

411
model o ruchu obrotowym R
Izr - zredukowany masowy
moment bezwładności
Mzr - moment zredukowany

412
w określonym przedziale czasu praca L sił zewnętrznych wywołuje
zmianę energii kinetycznej E
EL
Równania ruchu dla modelu o ruchu postępowym
dt
dsmddsFF zr
BzrCzr v2
v2
FC, FB - siła czynna, bierna

413
w określonym przedziale czasu praca L sił zewnętrznych wywołuje
zmianę energii kinetycznej E
EL
Równania ruchu dla modelu o ruchu obrotowym
dt
dIddMM zr
BzrCzr
2
2
MC, MB - moment czynny, bierny

414
Redukcja mas (mzr = , Izr = )
energia kinetyczna układu = energia kinetyczna modelu
E = Em
22
v 22
iiiii
ImE
k
i
iiiik
i
i
ImEE
1
22
1 22
v
człon w ruchu płaskim
k członów:

415
dla modelu o ruchu obrotowym
2
v2
zrm
mE
2
2zrm
IE

416
Wielkości masowe zredukowane
dla modelu o ruchu postępowym
k
i
iiiizr Imm
1
222
22
v
2
v
k
i
ii
iizr Imm
1
22
vv
v

417
dla modelu o ruchu obrotowym
k
i
iiiizr ImI
1
222
22
v
2
k
i
ii
iizr ImI
1
22v

418
2
33
2
22
2
22
2
11
2
11
v2
1
2
1v
2
1
2
1v
2
1
mIm
ImE
Energia kinetyczna układu

419
1
1
2
33
2
22
2
221
2
11
vvv
mImImI zr
33
2
22
2
22
2
11
2
11 vv
vv
v
vv
v
mImImmzr
Moment bezwładności zredukowany i masa zredukowana
itd
21 vv
itd
vv
v 11
Zależne od położenia układu !!!

420
moce rozwijane przez siły zewnętrzne i odpowiednią wielkość
zredukowaną są sobie równe
Redukcja sił w oparciu o porównanie mocy
moc sił zewnętrznych
iiii MN Fv
moc siły zredukowanej i momentu zredukowanego
zrzrzrzr MNFN v

421
Porównanie
zrNN
dla modelu o ruchu postępowym
iiiizr MF Fvv
1
dla modelu o ruchu obrotowym
iiiizr MM
Fv1

422
suma mocy rozwijanych przez siły zewnętrzne
1133v MFN
dla modelu o ruchu postępowym
31
13 vvv
MFFzr
dla modelu o ruchu obrotowym
13
31
v
FMM zr

423
d
dI
d
dI
I
d
dM zr
22
2
1
2
dt
dIddM zr
2
2
d
dI
dt
dIM zr
2
2
1

424
Mzr ma część reprezentującą siły czynne MCzr i siły bierne MBzr
2
2IddMM BzrCzr
Całkujemy w przedziale od p do k
22
22ppkk
BzrCzr
IIdMM
k
p
dMMII
I k
p
BzrCzr
k
p
k
p
k
222

425
tłocznik
matryca
blacha
t
F
t
moment
napędowy
1 cykl
F
przem. tłocznika

426
Przyczyny: zmienny Izr , zmienne momenty: MCzr i MBzr

427
Miara: – współczynnik
nierównomierności biegu:
śr
minmax
2
minmax śr

428
22
22pzrpkzrk
BzrCzr
IIdMM
k
p
Założenia:
ruch ustalony, znana sr
przebiegi MCzr() i MBzr() znane
zmienność zred. mom. bezwł.
pomijalna; Izr = const.

429
22
22pzrpkzrk
BzrCzr
IIdMM
k
p
dMMLk
p
BzrCzr
maxmin kp
2
min
2
max2
1 zrIL

430
2
min
2
max2
1 zrIL
22
min
2
max
minmaxminmax
minmaxminmax
2
22
śr
śrśr
śr
śr
2
2
śrzr
śrzrI
LIL

431
2
2
śrzr
śrzrI
LIL
zr
śr
KZ
śrKZzr
IL
III
L
22 ''
KOŁO ZAMACHOWE

432
KZKZ IGDg
GDI 40
4
22

433
2
S
W
KW
KS
I
I
2
S
W
KW
KS
I
I
KSI
KWI

434
Koło zamachowe pełni rolę
mechanicznego akumulatora
energii.
Akumuluje ją w tych fazach
ruchu, kiedy siły czynne
przeważają nad biernymi i
zwiększają prędkość układu i
oddaje w fazach przewagi sił
biernych, kiedy układ ma
tendencję do obniżania
prędkości.