Wykład 2
18
Wykład 2 Podstawowe informacje dotyczące programowania systemów wbudowanych Programowanie rdzenia procesora SAB80C537 dr inż. Andrzej Przybył Katedra Inżynierii Komputerowej Politechnika Częstochowska
description
Wykład 2. Podstawowe informacje dotyczące programowania systemów wbudowanych Programowanie rdzenia procesora SAB80C537 dr inż. Andrzej Przybył Katedra Inżynierii Komputerowej Politechnika Częstochowska. Wiadomości podstawowe. Przypomnijmy sobie, co będziemy robić: - PowerPoint PPT Presentation
Transcript of Wykład 2

Wykład 2Podstawowe informacje dotyczące
programowania systemów wbudowanych
Programowanie rdzenia procesora
SAB80C537
dr inż. Andrzej PrzybyłKatedra Inżynierii Komputerowej
Politechnika Częstochowska

2
Wiadomości podstawowe
Przypomnijmy sobie, co będziemy robić:
*) Oprogramowanie (firmware) dla urządzeń wbudowanych stanowi specyficzną gałąź programowania narzucającą restrykcyjne ograniczenia na rozmiar, budowę oraz szybkość działania programu (oprogramowanie czasu rzeczywistego, tworzenie sterowników dla urządzeń oraz systemów operacyjnych dedykowanych dla konkretnych platform sprzętowych, ...).
• ... a także realizacja typowych algorytmów sterowania, takich jak regulatory typu P-I-D, regulatory histerezowe, regulatory dwustanowe w reżimie czasu rzeczywistego przy wykorzystaniu mechanizmu przerwań sprzętowych
• implementacja pomocniczych procedur obliczeniowych: limitowanie zakresu sygnału na zadanej wartości (nasycanie), operacje typu MAC (Multiply-Accumulate), różniczkowanie i całkowanie sygnałów
• dostęp i konfiguracja specjalizowanych rejestrów sterujących sterowanych urządzeń
• komunikacja za pośrednictwem standardów transmisji szeregowej z urządzeniami wykonawczymi lub pomiarowymi, takimi jak: przetworniki AC, nieulotne pamięci szeregowe itp.
• realizacja interfejsu użytkownika
*definicja znaleziona, za pomocą wyszukiwarki google, na stronie internetowej http://www.codeconcept.pl/pl/Services_FW_Embedded.php

3
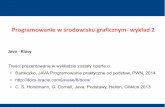
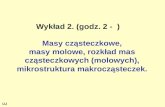
Symbol graficzny mikrokontrolera, do użycia na schemacie ideowym w systemie mikroprocesorowym
• Widoczne są tzw. „nóżki” mikrokontrolera („piny”), i oznaczenia ich funkcji.
• Główną funkcją nóżek kontrolera są porty wejścia/wyjścia. Porty są zgrupowane po osiem i nazwane P0, P1, P2, ... itd. (każdy port to 8 sygnałów = 8 bitów w słowie procesora)
• Pozostałe sygnały to: zasilanie (VAGND, VSS, VCC) sygnał resetu (RESET), sygnał zegara taktującego (XTAL1, XTAL2) itp.

4
Pierwszy program dla systemu wbudowanego z mikrokontrolerem SAB80C537 (Siemens/Infineon)
– sterowanie portami wyjściowymi (GPIO)NAME PROGRAM$INCLUDE (REG517.INC) ; dołączenie pliku definicji rejestrów procesora 80C537PROGRAM SEGMENT CODE ;definicja segmentu zawierającego kod programu
org 0x0000 ;ustawienie adresu początku programu (pierwszej instrukcji)JMP STARTRSEG PROGRAM ;informacja dla linkera - następne dane to kod programu
;(będzie umieszczony w segmencie pamięci CODE)START :
;… tu zamieszczamy instrukcje, które maja się wykonac jednorazowo po uruchomieniu programuPETLA: ;poczatek petli glownej programu
mov P1,#00000000b ; wpisanie do wszystkich bitów portu P1 wartości zero ;= ustawienie stanu niskiego na 8 liniach wyjściowych mikrokontrolera
mov P1,#00000010b ; wpisanie do wszystkich bitów portu P1 wartości binarnej ;= ustawienie stanu niskiego na 7 liniach wyjściowych mikrokontrolera, ;oraz stanu wysokiego na linii P.1 ;(bit numer 1 – bity są numerowane od prawej do lewej: nr bitu = 76543210
jmp PETLA ; instrukcja skoku – zmiana naturalnej kolejności ;wykonywania instrukcji – „skok” do miejsca oznaczonego
;etykieta tekstową ‘PETLA’
END poznane instrukcje: MOV, JMPpoznane dyrektywy: ORG, SEGMENT CODE, ENDpoznana składnia: struktura projektu, adresowanie natychmiastowe (#)
wykorzystanie etykiet, dołączanie plików nagłówkowych ($include)

5
Drugi program - obsługa portów wejściowych GPIO, np. sygnałów z czujników lub klawiatury
…org 0x0000 ;ustawienie adresu początku programu (pierwszej instrukcji)
ETYKIETA1:JNB P5.1, STAN_NISKI_NA_LINII_1
; przetestowanie linii wejściowej P5.1 mikrokontrolera i skok do etykiety;STAN_NISKI_NA_LINII_1 w przypadku wykrycie stanu niskiego
;gdy program dotarł do tego miejsca, to znaczy że na linii P5.1 był stan wysoki;tu wstawiamy instrukcje procesora, które mają się wykonać w takim przypadku
mov P1,#00000010bjmp ETYKIETA1 ; powrót do początku programu (pętla główna)
STAN_NISKI_NA_LINII_1:;gdy program dotarł do tego miejsca, to znaczy że na linii P5.1 był stan niski;tu wstawiamy instrukcje procesora, które mają się wykonać w takim przypadku
mov P1,#00000000bjmp ETYKIETA1 ; powrót do początku programu (pętla główna)
…
poznane instrukcje: JNB oraz JB

6
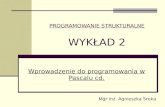
Mikrokontroler SAB80C537Jest to jeden z mikrokontrolerów z rodziny ’51 (tzw. „pięćdziesiątka jedynka”). Inne kontrolery z tej rodziny to 80C51, 80C2051, 80C535, itp. UWAGA – dostępna jest bardzo obszerna liczba publikacji dotycząca procesorów z rodziny ’51 – LITERATURA
Procesory z rodziny ‘51 są najpopularniejsząoraz produkowaną i używaną do dziś rodziną mikrokontrolerów!
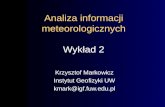
Po lewej SAB80C537 produkcji Intel (rok produkcji 1980 (!), szybkośc 16 MHz – procesor 12-taktowy. Wykonywanie jednej instrukcji zajmuje 12 taktów zegara.
Po prawej SAB-C515 produkcji Infineon (Siemens) – rok produkcji 1992 – nieco uboższa, kolejna z odmian podstawowej wersji procesora 80C51 (zdjęcie po lewej stronie u dołu)
Strona prawa u dołu – zdjęcie płytki laboratoryjnej używanej w Katedrze Inżynierii Komputerowej Politechniki Częstochowskiej. Widoczne są: przyciski, potencjometry, wyświetlacz alfanumeryczny LCD, wyświetlacz 7-segmentowy LED oraz w górnej części pamięci RAM i EPROM i złącze do komunikacji szeregowej w standardzie RS232.

7
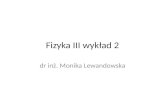
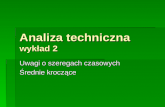
Budowa mikrokontrolera SAB80C537 (Siemens)/Infineon
W schemacie blokowym wyróżnić można:
• CPU (Central Processor Unit) – centralna jednostka przetwarzająca odpowiedzialna za wykonywanie rozkazów procesora.
• Wewnętrzna pamięć RAM 256 bajtów oraz opcjonalna ROM,
•Porty wejścia/wyjścia (I/O – Input/Output) – P0 – P8
•Jednostka mnożąco dzieląca – Div./Mul. –Unit
•Uniwersalne oraz specjalizowane układy czasowo- licznikowe, tzw. Timery: T0, T1, T2, Capture/Compare Unit
•Moduły do obsługi komunikacji szeregowej: Serial channel 0 i 1
•Przetwornik analogowo/cyfrowy: A/D Converter
•Elementy dodatkowe: oscylator, watchdog, itp.
Uwaga: możliwe jest podłączenie zewnętrznej pamięci o pojemności maksymalnie 64kbajty. Wykorzystywane są w tym celu specjalne właściwości niektórych portów I/O. Porty zajęte do obsługi komunikacji z pamięcią zewnętrzną nie mogą być użyte do innych celów.

8
Budowa jednostki centralnej CPU - „rdzeń” mikrokontrolera
• Procesor 8-bitowy – to znaczy, że jego podstawowa jednostka przetwarzająca operuje na słowie 8-bitowym
• Grupa rejestrów uniwersalnych R0-R7
• Dwa tzw. ”Akumulatory” (A, B ) – nazwa wywodzi się od ich pierwotnego zastosowania w procesorach: Akumulacji czyli sumowania. Podstawowy akumulator to A.
• Operacje arytmetyczne (dodawanie, odejmowanie, mnożenie, itp.) oraz logiczne (operacje na bitach typu AND, OR, NOT, XOR, itp.) dozwolone są tylko na akumulatorach A i B
• Pozostałe rejestry rdzenia procesora są specjalizowane – służą do konkretnych celów, np.:
– DPTR – Data PoinTeR – wskaźnik danych w pamięci zewnętrznej. Jest to jeden z dwu rejestrów 16-bitowych w tym 8-bitowym procesorze. Służy do zadawania adresu podczas odczytu z komórki pamięci zewnętrznej. (Do procesora można podłączyć pamięć zewnętrzną o pojemności maksymalnie 64kbajty = 216 bajtów, która wymaga 16-bitowego adresowania).
– PSW – Program Status Word – słowo statusowe programu składające się z tzw. flag statusowych.
– PC - Program Counter – 16 bitowy rejestr wskazujący adres aktualnie wykonywanego rozkazu z pamięci procesora.
– SP – Stack Pointer – wskaźnik stosu, służący do obsługi specjalnej struktury danych w pamięci wewnętrznej procesora.

9
Podstawowe instrukcje rdzenia procesora oraz wybrane tryby adresowania
MOVprzykłady użycia:
tryb adresowania rejestrowy:MOV A,B ;kopiowanie wartości z rejestru B do rejestru A (kierunek operacji dwu-
argumentowych zawsze z prawej na lewą)MOV A, R0 ; kopiowanie wartości z rejestru R0 do AMOV R0, A ; kopiowanie wartości z rejestru A do R0
tryb adresowania natychmiastowy:MOV A,#10 ;kopiowanie stałej wartości dziesiętnej (podanej natychmiastowo) do
rejestru AMOV A,#0Ah ;j.w. – ale liczbę dziesięć zapisano w kodzie szesnastkowymMOV A,#00001010b ;j.w. – ale liczbę dziesięć zapisano w kodzie binarnym
tryb adresowania bezpośredni:MOV A,10 ;kopiowanie zawartości komórki o adresie 10, z pamięci
wewnętrznej

10
Instrukcje arytmetyczneADD, SUBB oraz
flaga przeniesienia/pożyczki ACprzykład użycia:
tryb adresowania rejestrowy (w operacjach arytmetycznych jeden z argumentów jest zawsze w Akumulatorze A, wynik zawsze zostanie zapisany w A):
ADD A,B ;dodawanie wartości z rejestru B do rejestru A
ADD A, R0 ;dodawanie wartości z rejestru R0 do A
tryb adresowania natychmiastowy:
ADD A,#10 ;dodawanie stałej wartości licbowej (podanej po symbolu # w postaci dziesiętnej, szesnastkowej lub binarnej) do rejestru A
tryb adresowania bezpośredni:
ADD A,10 ;dodawanie zawartości komórki o adresie 10, z pamięci wewnętrznej do zawartości A

11
Rejestr statusowy PSW – Program Status Word
Symbol Numer Bitu OpisCY 7 Flaga przeniesienia i pożyczki
AC 6 Flaga przeniesienia dodatkowego dla operacji BCD
F0 5 Flaga 0 ogólnego przeznaczenia
RS1 4 Wybór położenia banku rejestrów uniwersalnych R0-R7:
RS1,RS0 = 00 = Bank 0, adres 00H-07H
RS1,RS0 = 01 = Bank 1, adres 08H-0FH
RS1,RS0 = 10 = Bank 2, adres 10H-17H
RS1,RS0 = 11 = Bank 3, adres 18H-1FH
RS0 3
OV 2 flaga przepełnienia
F1 1 Flaga ogólnego przeznaczenia
P 0 Flaga parzystości
Rejestr zawiera flagi wskazujące na wynik ostatniej wykonanej operacji arytmetycznej lub logicznej w rdzeniu procesora.

12
Flaga przeniesienia i pożyczki CY
funkcjonowanie podczas dodawania
Ustawiana jest, gdy wynik operacji arytmetycznej (np. dodawanie) nie mieści się na jednym bajcie.
Przykład
mov A, #255add A, #1 ;w trakcie wykonywania tej instrukcji nastąpi tzw. przeniesienie – czyli ustawienie flagi CY
Wytłumaczenie:Wynik prawidłowy to 256, ale maksymalna wartość liczbowa jaką da się zapisać na 8 bitach (bajcie) wynosi 255.
1111 1111b = 255 +0000 0001b = 1 =1 0000 0000b = 256 (wartość zero na 8-bitowym rejestrze wyniku +
ustawiona flaga sygnalizująca przeniesienie)

13
Flaga przeniesienia i pożyczkiCY
funkcjonowanie podczas odejmowania
Ustawiana jest również, gdy wynik operacji arytmetycznej (np. dodawanie) nie mieści się na jednym bajcie.
Przykład wystąpienie pożyczki
mov A, #0clr c ;konieczne jest skasowanie flagi CY przed wykonaniem
instrukcji odejmowania, gdyż instrukcja SUBB odejmuje od A (oprócz;argumentu) również wartość tej flagi wynosząca zero lub jeden.
subb A, #1 ;w trakcie wykonywania tej instrukcji nastąpi tzw. pożyczka – czyli;ustawienie flagi CY
Wytłumaczenie:Wynik prawidłowy to -1, ale minimalna wartość liczbowa jaką da się zapisać na 8 bitach w naturalnym kodzie binarnym (NKB) wynosi 0.
0000 0000b = 255 -0000 0001b = 1 =1 1111 1111b = 255 =w NKB 8-bitów, ale należy uwzględnić, że wystąpiła pożyczka, prawidłowy wynik = -1)

14
Instrukcje skoków warunkowychJC, JNC
JC ETYKIETA ;”skok” warunkowy do miejsca oznaczonego jako ETYKIETA
Warunkiem wykonania skoku jest
USTAWIONA flaga CY
JNC ETYKIETA ;”skok” warunkowy do miejsca oznaczonego jako ETYKIETA
Warunkiem wykonania skoku jest
SKASOWANA flaga CY

15
Instrukcje skoków warunkowychJZ, JNZ
JZ ETYKIETA ;”skok” warunkowy do miejsca oznaczonego jako ETYKIETA
Warunkiem wykonania skoku jest ZEROWA wartość akumulatora A
JNZ ETYKIETA ;”skok” warunkowy do miejsca oznaczonego jako ETYKIETA
Warunkiem wykonania skoku jest NIEZEROWA wartość akumulatora A

16
Trzeci program konstrukcja prostej pętli
analogiczny zapis w języku symbolicznymR0=0;do ...R0=R0+1while (R0<10)
org 0x0000 ;ustawienie adresu początku programu (pierwszej instrukcji)
mov R0,#0 ; ustawienia wartości początkowej zmiennej R0
POCZATEK_PETLI:;... dowolne instrukcje
mov A,R0 ;zwiększenie wartości R0:=R0+1add A,#1mov R0,A
mov A,R0 ;ta instrukcja jest zbędna (aktualna wartość R0 jest już w A)clr Csubb A,#10jc POCZATEK_PELI ; powrót do początku pętli, JEŚLI flaga C jest ustawiona – czyli wartość ;odjemnej (A) była mniejsza od liczby 10

17
Podsumowanie
poznane instrukcje: MOV, JMP, JC, JNC, JZ, JNZ, JB, JNB, ADD, SUBB, CLR C
poznane dyrektywy: ORG
poznana składnia: adresowanie natychmiastowe (#), absolutne, rejestrowewykorzystanie etykietdołączanie plików nagłówkowych ($include)
poznane elementy budowy mikrokontrolera:porty I/O, rejestry uniwersalne A,B, R0-R7, rejestr PSW i flagi statusowe
poznane techniki programowania:rozgałęzienia programukonstruowanie prostych pętliwykorzystanie operacji wielokrotnej precyzji

18
Przykładowe pytania testowe
1. Opisać rejestry uniwersalne mikrokontrolera z rodziny ’51.
2. Opisać podstawowe tryby adresowania na przykładzie instrukcji dodawania?
3. Co to jest i do czego służy rejestr statusowy PSW?
4. Jakie są ograniczenia związane ze stosowaniem instrukcji arytmetycznych w procesorze z rodziny ‘51?
5. Co to są instrukcje skoków warunkowych?
6. Skonstruować prosta pętlę programową o podanych parametrach?