
FILTRY CYFROWE WYKŁAD 2
13
FILTRY CYFROWE WYKŁAD 2
description
FILTRY CYFROWE WYKŁAD 2. Metodyka projektowania filtrów cyfrowych. - Projektowanie filtrów NOI; - Przykładowe projekty filtrów NOI; - Projektowanie filtrów SOI - Porównanie właściwości filtrów typu NOI i SOI;. Typ projektowanego filtru. - PowerPoint PPT Presentation
Transcript of FILTRY CYFROWE WYKŁAD 2

FILTRY CYFROWE
WYKŁAD 2

2
-Projektowanie filtrów NOI; -Przykładowe projekty filtrów NOI;
-Projektowanie filtrów SOI
-Porównanie właściwości filtrów typu NOI
i SOI;
Metodyka projektowania filtrów cyfrowych

3
Metodyka projektowania filtrów cyfrowych
ω
ω' ss
ω
ss
ω'
gdωω
;)ω(ω
ωω'
2
dg
gd
ss
s
gdωω
;ωω
)ω(ω' 2
dg
dg
ss
s
Typ projektowanego filtru Przekształcenie
Dolnoprzepustowy Ha(s’), częstotliwość odcięcia projektowanego filtru.
Górnoprzepustowy Ha(s’), częstotliwość odcięcia projektowanego filtru.
Środkowoprzepustowy Ha(s’), dolna i górna częstotliwość odcięcia projektowanego filtru.
Środkowozaporowy Ha(s’), dolna i górna częstotliwość odcięcia projektowanego filtru.
Dla filtru NOI. Projektowanie na podstawie aproksymacji filtrów czasu ciągłegopodstawowe zależności :
s dT je z
)2
arctan(2 sa
sd
TT
;112
zz
Ts
s
21
21
21
21
21
21
21
21
659.2569.3258.10456.2256.4456.2)(
659.2596.3258.9456.2156.3456.1)(
236.1269.5268.11456.2256.2456.1)(
699.2569.3258.10436.2256.4456.2)(
zzzzzH
zzzzzH
zzzzzH
zzzzzH

4
Metodyka projektowania filtrów cyfrowych
Interpolacja trygonometryczna W tej metodzie projektowania funkcja H(e jω) poszukiwanego układu jest po prostu interpolacyjnym wielomianem trygonometrycznym stopą (N-1)
Projektowanie za pomocą sum częściowych szeregu Fouriera. Najbardziej bezpośrednim podejściem do projektowania filtrów o skończonej odpowiedzi impulsowej jest obcinanie ciągu stanowiącego nieskończoną odpowiedź impulsową.

5
Badanie symulacyjne wybranych typów filtrów
w środowisku Matlab-Simulink

6
Badanie symulacyjne wybranych typów filtrów
w środowisku Matlab-Simulink.

7
Badanie symulacyjne wybranych typów filtrów
w środowisku Matlab-Simulink

8
Badanie symulacyjne wybranych typów filtrów
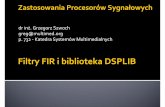
w środowisku Matlab-Simulink Wpływ rzędu filtru na pasmo przejścia i czas ustalania odpowiedzi.Wykresy przedstawiają kolejno odpowiedz na skok jednostkowy dla filtru Butterwortha rzędu 2,5,15,60,73.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-500
-400
-300
-200
-100
0
100
200
300
Normalized Frequency ( rad/sample)
Mag
nitu
de (
dB)
Magnitude Response in dB
0 1 2 3 4 5 6 7 8 9 10 110
0.2
0.4
0.6
0.8
1
1.2
1.4
Samples
Am
plitu
de
Step Response
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Samples
Am
plitu
de
Step Response
0 10 20 30 40 50 60 70 80 900
0.2
0.4
0.6
0.8
1
1.2
1.4
Samples
Am
plitu
de
Step Response
0 50 100 150 200 250 300 3500
2
4
6
8
10
12x 10
5
Samples
Am
plitu
de
Step Response
0 50 100 150 200 250 3000
1
2
3
4
5
6x 10
10
Samples
Am
plitu
de
Step Response

9
Wpływ struktury filtru na stabilność układu
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-500
-400
-300
-200
-100
0
100
200
300
Normalized Frequency ( rad/sample)
Mag
nitu
de (
dB)
Magnitude Response in dB
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-3500
-3000
-2500
-2000
-1500
-1000
-500
0
500
Normalized Frequency ( rad/sample)
Mag
nitu
de (d
B)
Magnitude Response in dB
-K-
b(5)
a(5)
1
Output
-K-
b(4)
-K-
b(3)
-K-
b(2)
-K-
b(1)
-K-
-K-
a(4)
-K-
a(3)
-K-
a(2)
z-1
z-1
z-1
z-1
1
Input
b(3,2)b(3,1)
1
Output
-K-
s(1)
-K--K-
-K-
b(2,2)
-K-
b(2,1)
-K-
a(3,2)
-K-
a(3,1)
-K-
a(2,2)
-K-
a(2,1)
[Sect1] [Sect1]
z-1
z-1
z-1
z-1
1
Input

10
Badanie symulacyjne wybranych typów filtrów
w środowisku Matlab-Simulink Wpływ rzędu filtru i pasma przejścia na dokładność filtracji
co do amplitudy i fazy.
Filtr CzebyszewaII---1000-20000Hz 3 rzędu
---1000-10000Hz 4 rzędu
---1000-5000Hz 5rzędu
---1000-1300Hz 12rząd
---sygnał 100Hz
---sygnał zakłócony częstotliwościami powyżej 10000Hz
0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-6
-4
-2
0
2
4
6

11
Badanie symulacyjne wybranych typów filtrów
w środowisku Matlab-Simulink
2 4 6 8 10 12 14
x 10-3
-8
-6
-4
-2
0
2
4
6
8
czestotliwosc [rad/sec]
ampl
ituda
Zależność między różnymi typami filtrów tych samych rzędów.---Butterwoetha 5 i 20 rzędu---CzebyszewaI 5 i 20 rzędu---CzebyszewaII 5 i 20 rzędu--- Eliptyczny 5 i 20 rzędu---sygnał 100Hz
---sygnał zakłócony
2 4 6 8 10 12
x 10-3
-5
-4
-3
-2
-1
0
1
2
3
4
5

12
Badanie symulacyjne wybranych typów filtrów
w środowisku Matlab-Simulink
2 3 4 5 6 7 8 9 10 11 12
x 10-3
-8
-6
-4
-2
0
2
4
6
8
--- CzebyszewaI Fs 50000Hz---CzebyszewaI Fs 28000Hz---Czebyszewa I Fs 18000Hz---Czebyszewa I Fs 13000Hz---sygnał 100Hz
---sygnał zakłócony
Wpływ częstotliwości próbkowania na pracę filtru.

13
Podsumowanie
Środowisko Matlab-Simulink jest narzędziem bardzo przydatnym do analizy i projektowania filtrów, zawiera wiele wbudowanych funkcjido wykreślania charakterystyk czasowych,częstotliwościowych i fazowych badanych przebiegów.





![Metody filtracji cyfrowej w ocenie topografii …yadda.icm.edu.pl/yadda/element/bwmeta1.element.baztech...wać filtry cyfrowe [7], rozwijać procedury filtracji w różnych dziedzinach,](https://static.fdocuments.pl/doc/165x107/5c79104209d3f294278c286d/metody-filtracji-cyfrowej-w-ocenie-topografii-yaddaicmeduplyaddaelement-c.jpg)










