![ramesville.plramesville.pl/uploads/files/Newsville/gazetka4.pdf · *zakÇepuje zasta za Mir-kg Def Mir Kando [11:40.44] kieíys chcialam wypisac nafejsie wszystkie swcye nazwts a](https://static.fdocuments.pl/doc/165x107/5c77a9c609d3f2c43b8c4e0f/-zakcepuje-zasta-za-mir-kg-def-mir-kando-114044-kieiys-chcialam-wypisac.jpg)
WYBRANE NAPE˛DY Z SILNIKAMI ELEKTRYCZNYMI W … · zasta˛piona dowolna˛ inna˛. Cwiczenia maja˛...
46
Grzegorz Sieklucki Józef Gromba W YBRANE NAP ˛ EDY Z SILNIKAMI ELEKTRYCZNYMI W POJAZDACH SAMOCHODOWYCH Kompilacja: 16 lutego 2017 ........................................................... WLA ´ SCICIEL
Transcript of WYBRANE NAPE˛DY Z SILNIKAMI ELEKTRYCZNYMI W … · zasta˛piona dowolna˛ inna˛. Cwiczenia maja˛...

Grzegorz Sieklucki
Józef Gromba
WYBRANE NAPEDY Z SILNIKAMI ELEKTRYCZNYMI
W POJAZDACH SAMOCHODOWYCH
Kompilacja: 16 lutego 2017
...........................................................
WŁASCICIEL

AGH
EAIiIB
PODZESPOŁY ELEKTRYCZNE POJAZDÓW SAMOCHODOWYCHRok I, II stopień stacjonarne, rok akademicki: 2016/2017
Kierunek: Elektrotechnika,
Specjalność: Inżynieria elektryczna w pojazdach samochodowych
Ćwiczenie Tematy:
WGrupa/Zespół
Data wykonania: Data oddania: Ocena:
2

Spis tresci
Rozdział 1. Wstep . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85 . . . 7
2.1. 3. strefowa regulacja predkosci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2. Uproszczone równanie Klossa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3. Równanie ruchu wzdłuznego pojazdu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1. Model ruchu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.2. Siły i momenty – przeniesienie napedu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4. Przyblizone parametry pojazdu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5. Cwiczenie 1A – zadanie domowe – charakterystyka silnika trakcyjnego . . . . . . . . . . . . . 13
2.6. Całkowanie numeryczne równan ruchu – metoda Eulera . . . . . . . . . . . . . . . . . . . . . . 14
2.7. Cwiczenie 1B – modelowanie ruchu pojazdu w srodowisku MATLAB . . . . . . . . . . . . . . 14
2.8. Zadanie dodatkowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.9. Cwiczenie 1C – modelowanie ruchu pojazdu w srodowisku SIMULINK . . . . . . . . . . . . . 19
Rozdział 3. Charakterystyki mechaniczne silnika indukcyjnego – silnik trakcyjny . . . . . . . 25
3.1. Wprowadzenie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2. Cwiczenie 2 – charakterystyki mechaniczne silnika indukcyjnego . . . . . . . . . . . . . . . . . 26
Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem . . . . . . . . . . . . . . . . . . . . . 29
4.1. Budowa i działanie silnika BLDC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2. Wykorzystanie czujników Halla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.3. Naped z silnikiem BLDC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.4. Cwiczenie 3A – regulacja predkosci i połozenia silników BLDC . . . . . . . . . . . . . . . . . . . 37
4.5. Cwiczenie 3B – badania symulacyjne układu napedowego z silnikiem BLDC . . . . . . . . . . 39
Dodatek A. Własne notatki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Bibliografia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45


Rozdział 1
Wstep
Na pierwsze zajecia laboratoryjne nalezy przyjsc z rozwiazanym zadaniem domowym
– cwiczenie 1A.
W opracowaniu wykorzystano nastepujace symbole umieszczone na marginesach:
Í realizacja schematu, badz jego modyfikacje w srodowisku SIMULINK ,
Ï napisanie pliku tekstowego typu m-file i jego wykorzystanie w srodowisku MATLAB lub
wykonywanie obliczen w oknie MATLAB Command Window,
Ò obowiazkowe umieszczenie w sprawozdaniu omówionego w tekscie wykresu,
✍ obowiazkowe wykonanie obliczen, komentarzy badz realizacja tabeli z wynikami symulacji
i umieszczenie ich w sprawozdaniu.
Jako literature uzupełniajaca zaleca sie:
— w zakresie napedów elektrycznych i automatyki napedu (Sieklucki, Bisztyga, Zdrojewski,
Orzechowski & Sykulski 2014),
— w zakresie fizyki i mechaniki (Feynman, Leighton & Sands 2013, Taylor 2012),
— w zakresie zastosowania silników elektrycznych w pojazdach samochodowych (Nam 2010).

Rozdział 2
Podstawy napedów trakcyjnych – silnik główny
pojazdu TESLA MODEL S P85
Celem cwiczenia jest zapoznanie sie charakterystykami silników trakcyjnych stosowanych
w pojazdach samochodowych. Pretekstem jest tu naped z jednego z najnowoczesniejszych
pojazdów. Z uwagi na fakt, ze nigdy nie nalezy analizowac pracy samego silnika tylko trzeba
uwzglednic jego obciazenie, czyli maszyne robocza. W przypadku motoryzacyjnym maszyna
robocza jest karoseria pojazdu i koła, natomiast przeniesienie napedu odbywa sie przez prze-
kładnie mechaniczna.
Przedstawiony problem ma charakter bardzo ogólny, tzn. charakterystyka silnika moze byc
zastapiona dowolna inna. Cwiczenia maja charakter przypomnienia zagadnien z kinematyki,
metod numerycznych i wstepu do sterowania napedami głównymi pojazdów.
2.1. 3. strefowa regulacja predkosci
W układach napedowych mozliwa jest praca z predkosciami katowymi wiekszymi od zna-
mionowej ωN, jednoczesnie przy momencie obciazenia mniejszym od znamionowego MN (Sieklucki
et al. 2014, Bose 2002, Sul 2011, Novotny & Lipo 1996, Kazmierkowski & Tunia 1994,
Chiasson 2005, De Doncker, Pulle & Veltman 2011, Drozdowski 1998). Wiaza sie z tym cha-
rakterystyczne strefy pracy silnika i typowo okresla sie dwa zakresy.
1) Praca na stały moment – oznacza prace silnika przy stałej, równej znamionowej, wartosci
strumienia magnetycznego (pola) w szczelinie powietrznej.
2) Praca na stała moc – oznacza prace silnika przy mniejszej od znamionowej wartosci stru-
mienia magnetycznego w szczelinie powietrznej. Takie sterowanie pozwala uzyskac pred-
kosci katowe wirnika wieksze od znamionowej.
Obecnie w zakresie najwyzszych predkosci uzupełnia sie powyzsze zakresy o prace z ob-
nizona wartoscia pradu dla silnika obcowzbudnego lub ze stała pulsacja poslizgu dla silnika
indukcyjnego. Dlatego przyjmuje sie pojecie trójstrefowej regulacji predkosci katowej silnika.
Dla predkosci wiekszych od znamionowej wartosc strumienia powinna zmalec. SEM silnika
zalezy od iloczynu predkosci katowej i strumienia skojarzonego z uzwojeniem twornika (silnik
obcowzbudny) lub stojana (silnik pradu przemiennego).
Prady uzwojen wszystkich silników elektrycznych sa ograniczone, wiec momenty elektro-
magnetyczne silników w przypadku osłabienia pola beda mniejsze od MN. Oznacza to, ze wraz
ze zwiekszeniem predkosci katowej silnika maleje strumien w szczelinie powietrznej, co pro-
wadzi do generacji mniejszego, momentu elektromagnetycznego.
Takie metody regulacji silnikami sa stosowane miedzy innymi w układach transportowych
(Plunkett & Lipo 1976, Plunkett & Plette 1977, Plunkett 1977, Kazmierkowski, Wójcik, Swier-
czynski & Janaszek 2008, Sieklucki 2017).
Na rysunku 2.1 przedstawiono ogólnie charakterystyki M = ƒ (ω), P = ƒ (ω) i ψ = ƒ (ω) dla
pracy ciagłej napedu (Sieklucki et al. 2014).
Przedstawione na rysunku 2.1 strefy regulacji oznaczaja:

8 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
ωm
Pm
MN, PN
ωN
ωd
Strefa 1
Me=const.
Me
Strefa 2
Me 1/ωm
Rysunek 2.1. Teoretyczna trójstrefowa regulacja predkosci katowej
Strefa 1: oznacza prace na stały moment Me = const i wówczas moc czynna przekazywana do
maszyny roboczej narasta liniowo wraz ze wzrostem predkosci katowej (Pm = Meωm). Strefa
ta oznacza równiez prace z ograniczonym pradem i stała wartoscia strumienia w szczelinie
powietrznej.
Strefa 2: oznacza prace na stała moc czynna silnika Pm = PN = Meωm, gdzie moment elek-
tromagnetyczny silnika zmienia sie odwrotnie proporcjonalnie do predkosci katowej silnika
(Me ∝1ωm
). W strefie tej napiecie zasilania jest równe napieciu znamionowemu UN. Równo-
czesnie prad uzwojenia twornika ma wartosc znamionowa, a zmniejszeniu ulega strumien
w szczelinie powietrznej.
Strefa 3: wprowadzenie strefy 3 jest wymuszone przez konstrukcje silników i ich układów
zasilania, poniewaz nie jest mozliwe dalsze powiekszanie predkosci przy utrzymaniu wa-
runków strefy 2. Strefa 3 rozpoczyna sie od predkosci granicznej ωd (rys. 2.1), która wyzna-
czana jest na podstawie równan silnika lub przesłanek konstrukcyjnych. Praca w tej strefie
oznacza wysterowanie silnika tak jak silnika szeregowego. W tak zdefiniowanym zakresie
pracy moment elektromagnetyczny maleje szybciej niz w strefie 2 (Me ∝1
ω2m
), a moc maleje
hiperbolicznie Pm ∝1
ωm. Czesto podaje sie, ze strefa 3. jest praca na stała wartosc Pm ·ωm.
Mozliwosc pracy strefowej pozwala na uzyskiwanie przez silnik predkosci katowych duzo
wiekszych od znamionowej, ale dla malejacych hiperbolicznie momentów obciazenia.
Punktem wyjscia jest załozenie, ze moment silnika jest proporcjonalny do iloczynu stru-
mienia ψm w szczelinie powietrznej i pradu wirnika R (przyjmujac wstepnie RS = 0)(Plunkett
& Lipo 1976, Sieklucki et al. 2014):
Me ∝ ψmR (2.1)
natomiast strumien ψm jest proporcjonalny do napiecia zasilania stojana i odwrotnie propor-
cjonalny do pulsacji tego napiecia:
ψm ∝US
ω1
(2.2)
Z kolei prad wirnika zalezy od strumienia w szczelinie powietrznej i pulsacji poslizgu ω2 =
ω1 − pbωm:
R ∝ ψmω2 (2.3)

2.2. Uproszczone równanie Klossa 9
Z zaleznosci (2.2) i (2.3) wynika, ze R ∝US
ω1
ω2, a stad ostatecznie:
Me ∝
�US
ω1
�2
ω2 (2.4)
Mode 1 Mode 2 Mode 3
Field weakening region
constant slip frequency
curve (critical)
Rysunek 2.2. Regulacja trójstrefowa predkosci katowej silnika indukcyjnego dla RS = 0
2.2. Uproszczone równanie Klossa
W rozwazaniach nad praca silnika indukcyjnego jako napedu trakcyjnego wykorzystuje
sie tzw. uproszczone równanie Klossa, w którym pomija sie wpływ rezystancji stojana RS na
kształt charakterystyki mechanicznej silnika. Dokładne (kompletne) równanie Klossa lub do-
kładny wzór opisujacy stan ustalony silnika znajduje sie m.in. w nastepujacych publikacjach
(Bisztyga 1989, Boldea & Nasar 1999, Boldea & Nasar 2002, Bose 2002, Szklarski, Dziadecki,
Strycharz & Jaracz 1996, Skwarczynski & Tertil 2000, Trzynadlowski 2000, Kazmierkowski
& Tunia 1994, Tunia & Kazmierkowski 1983, Sieklucki et al. 2014).
US,ω1 jest odpowiednio napieciem stojana i jego czestotliwoscia. Wprowadza sie jednostki
wzgledne w postaci ϕ =ω1
ω1N, ϰ =
USUSN
. Uproszczone równanie Klossa (Leonhard 2001, Boldea
& Nasar 1999, Sieklucki et al. 2014) jest w postaci
Me =
2MKN
�ϰ
ϕ
�2
S
SK+SK
S
(2.5)
gdzie moment krytyczny i poslizg krytyczny definiuje sie jako (σ jest całkowitym współczynni-
kiem rozproszenia)
MeK = 3pb
�US
ω1
�2 1 − σ2LSσ
(2.6)

10 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
SK =RR
ϕω1NLRσ=
RR
ω1σLR=ω2K
ω1
=ω2K
ω2K + pbωm
(2.7)
Ponadto, krzywa pulsacji poslizgu krytycznego, która jest przedstawiona na rysunku 2.2 moz-
na opisac równaniem
MeK(ωm)
���US=USN
=mk
1
ω21
=mk
1
(pbωm + ω2K)2
(2.8)
gdzie mk =3pbU
2SN(1−σ)2σLS
.
MeK jest momentem krytycznym i wyznacza graniczna wartosc momentu elektromagne-
tycznego przy okreslonych warunkach zasilania.
Moment elektromagnetyczny krytyczny MeK silnika (Bisztyga 1989, Leonhard 2001, Sie-
klucki et al. 2014) zalezy:
• proporcjonalnie od liczby par biegunów pb,
• proporcjonalnie od kwadratu napiecia zasilajacego uzwojenia stojana US,
• odwrotnie proporcjonalnie od kwadratu pulsacji napiecia zasilajacego ω1,
• od całkowitego współczynnika rozproszenia σ,
• odwrotnie proporcjonalnie od indukcyjnosci uzwojen stojana LS.
Dla przypadku RS ≈ 0 mozna podac nastepujace przyblizone zaleznosci (Bisztyga 1989,
Chiasson 2005, Leonhard 2001):
cosφN ≈1 − σ1 + σ
,SN
SK≈pσ,
SN
S0≈
1pσ,
MKN
MN
≈1 + σ
2pσ
(2.9)
z których korzysta sie przy oszacowaniu parametrów silnika.
2.3. Równanie ruchu wzdłuznego pojazdu
2.3.1. Model ruchu
Najwazniejsze siły (opory ruchu i siła trakcyjna – silnika głównego) przeniesione na koła
pojazdu zostały zaprezentowane na rysunku 2.3 (Gillespie 1992).
Rysunek 2.3. Siły działajace na pojazd
Siła trakcyjna – przeniesienie napedu (△M - moment niezbedny do wprawienia w ruch
przekładni, d - srednica koła, - przełozenie przekładni mechanicznej):
FT = (Me − △M)2
d(2.10)

2.3. Równanie ruchu wzdłuznego pojazdu 11
Całkowite opory tarcia Fr sa modelowane w najprostszy sposób, tzn. jest to sumaryczny opór
wszystkich kół (Gillespie 1992):
Fr = ƒrmg, ƒr = ƒ0
�
1 +
161
�
(2.11)
gdzie jest predkoscia pojazdu w km/h, ƒ0 = 0,01 ÷ 0,02 dla utwardzonej nawierzchni (as-
falt). W literaturze mozna odszukac szereg zaleznosci okreslajacych opory tarcia opona-podłoze
i mozna je wykorzystac do przyblizonego okreslenia tej siły.
Opór aerodynamiczny (siła oporu powietrza):
FDF =1
2ϱ CdA( + )
2 (2.12)
gdzie gestosc powietrza na poziomie morza w temperaturze 15oC wynosi ρ = 1.225kg/m3,
natomiast jest predkoscia wiatru.
W modelu matematycznym ruchu pojazdu powinno byc równiez uwzglednione nachylenie
terenu, czyli siła zwiazana z przyciaganiem ziemskim – rozkład sił na poszczególne osie pojaz-
du został pominiety, wówczas te siłe okresla sie jako:
Fg =mg sin(α) (2.13)
Zastosowanie 2. zasady dynamiki Newtona prowadzi do wyrazenia:
md(t)
dt︸ ︷︷ ︸
(t)
= FT (t)− (FDF(t) + Fr(t) + Fg(t))︸ ︷︷ ︸
F′(t)
(2.14)
Z uwagi na fakt, ze siła oporu powietrza (2.12) jest wyrazeniem nieliniowym, wiec równanie
rózniczkowe zwyczajne (2.14) jest równiez równaniem nieliniowym. Z tego powodu najlepszym
sposobem okreslenia osiagów danego pojazdu jest zastosowanie metod numerycznych w roz-
wiazaniu równania (2.14).
2.3.2. Siły i momenty – przeniesienie napedu
Siły działajace na koła pojazdu i momenty przeniesione na wał silnika zostały przedsta-
wione na rysunku 2.4. Przekształcenie wypadkowej siły obciazajacej F′ na moment obciazenia
IM
Rysunek 2.4. Uproszczone przeniesienie napedu z silnika na koła pojazdu
silnika Mm przeprowadza sie z wykorzystaniem przełozenia przekładni:
Mm =△M +M′
, M′ =
F′d
2(2.15)

12 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
i zastosowanie 2. zasady dynami Newtona dla układu wirujacego prowadzi do:
Jdωm(t)
dt= Me(t) − Mm(t) (2.16)
gdzie J jest całkowitym momentem bezwładnosci przeniesionym na strone silnika, moment ten
wyznacza sie na podstawie porównania energii kinetycznej dla ruchu prostoliniowego i obro-
towego:
m2
2=Jω2
m
2
i po uwzglednieniu przełozenia przekładni otrzymuje sie:
J =md2
42(2.17)
Równania (2.14) i (2.16) opisuja ten sam elektromechaniczny system, ale w róznych układach
odniesienia.
Powyzsze równania mozna przedstawic w postaci schematu blokowego przetwarzania sy-
gnałów – rysunek 2.5.
Motor
Control+
Rysunek 2.5. Uproszczone sterowanie napedem pojazdu elektrycznego
2.4. Przyblizone parametry pojazdu
Osiagi samochodu TESLA MODEL S P85 (Sherman n.d.):
— 0-60mph (0-96,6km/h): 4,6s,
— 1/4-mili (402,5m): 13,3s i predkosc: 104 mph (167,5km/h),
— predkosc maksymalna: 134 mph (215,7km/h), czyli mx = 59,9m/s.
Parametry pojazdu:
— masa pojazdu z kierowca m ≈ 2200kg,
— współczynnik oporu powietrza Cd = 0.24, powierzchnia czołowa pojazdu A = 2,4m2,
— przełozenie przekładni mechanicznej = 9,73.
— opony: P245/45R19, czyli srednica kół wynosi d = 0.703m.

2.5. Cwiczenie 1A – zadanie domowe – charakterystyka silnika trakcyjnego 13
2.5. Cwiczenie 1A – zadanie domowe – charakterystyka silnika
trakcyjnego
Na niektórych stronach internetowych mozna znalezc charakterystyki statyczne silnika
indukcyjnego MODELU S (rys. 2.6):
http://electronics.stackexchange.com/questions/2716 74/tesla-car-maximum-torque-at-0-rpm-is-
https://geektimes.ru/post/279758/http://teslatrails.blogspot.com/2015/03/electric-mo tors-are-incredible.html
Wiarygodnosc tych charakterystyk moze byc dyskusyjna, ale w celach edukacyjnych sa one
wystarczajace i pozwalaja zapoznac sie z zasadami przeniesienia napedu w kazdym pojezdzie
naziemnym.
Zadanie domowe: uzupełnic wszystkie wartosci momentów i predkosci na ponizszym ry-
sunku. ✍
Rysunek 2.6. Charakterystyka silnika indukcyjnego ( predkosc pojazdu, n predkosc obroto-
wa silnika, ƒ czestotliwosc obrotu kół)

14 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
2.6. Całkowanie numeryczne równan ruchu – metoda Eulera
Rozwazajac problem ruchu dla naturalnego układu odniesienia, tzn. Ziemi (eq. (2.14)),
przyspieszenie i predkosc pojazdu okresla sie jako:
(t) =FT(t)− F′(t)
m,
d(t)
dt= (t) (2.18)
Zastosowanie metody Eulera (gdzie Ts jest nazywane krokiem całkowania)
d(t)
dt≈(t + Ts) − (t)
Ts
prowadzi do nastepujacego równania róznicowego
(t + Ts) = (t) + Ts(t)
które mozna zapisac w postaci algorytmicznej
(k + 1) = (k) + Ts(k) (2.19)
gdzie k jest krokiem obliczeniowym.
Wyznaczenie połozenia pojazdu spos(t) =
∫ t
0
(τ)dτ takze wymaga całkowania numerycz-
nego. Wówczas na podstawie metody Eulera uzyskuje sie
spos(k) = Ts(k) + spos(k − 1) (2.20)
Autorzy zdaja sobie sprawe z faktu, ze powyzsze rozdzielenie równan jest nieprawidłowe pod
katem metod numerycznych, ale ilustruje ono algorytm numerycznego całkowania zadanego
przebiegu. Prawidłowo problem rozwiazania równan ruchu powinien byc zastosowany do:
d(t)
dt= (t)
dspos(t)
dt= (t)
2.7. Cwiczenie 1B – modelowanie ruchu pojazdu w srodowisku MATLAB
Polecenie: Nalezy napisac program dla srodowiska Matlab lub Octave (Sieklucki 2017).Ï
01: clear02: g=9.81; %gravitational acceleration03: g_i=9.73;%gear ratio04: mass=2245; % mass=car+driver+m_105: d_w=(19 * 25.4+2 * 245* 0.45)/1000; %Diameter of wheels P8506: %d_w=0; %Diameter of wheels P85+07: Pn=310000; Mmax=600;pb=2;08: wI=516; %end of mode I09: wII=904; % end of mode II10: wIII=1920; %max. of IM11: w_2k=33.1; m_k=1.1627e+09;12: %-----drag force13: rho=1.225; % Density of air kg/m314: Cd=0.24; % drag coefficient15: A=2.4; % the reference area.16: %%---- IM curve

2.7. Cwiczenie 1B – modelowanie ruchu pojazdu w srodowisku MATLAB 15
17: wm_vect=0:0.5:1920;18: for i=1:length(wm_vect)19: Me(i)=(wm_vect(i)<=wI) * Mmax...
+(wm_vect(i)>wI&&wm_vect(i)<=wII) * Pn/wm_vect(i)...+(wm_vect(i)>wII) * m_k/(pb * wm_vect(i)+w_2k)^2;
20: end21: P=Me. * wm_vect;22: fig1=figure(1); hold off23: plot(wm_vect,Me,’k’,’LineWidth’,1.5); hold on24: plot(wm_vect,P/1000,’k--’,’LineWidth’,1.5);25: xlabel(’$\omega_m$’,’FontSize’,15,’Interpreter’, ’latex’)26: ylabel(’$M_e, P$’,’FontSize’,15,’Interpreter’,’la tex’)27: leg1=legend(’$M_e$ Nm’,’$P$ kW’);28: set(leg1,’FontSize’,15,’Interpreter’,’latex’);29: set(gca,’FontSize’,12);30: grid on31: %%------ Numerical methods32: t_step=0.05; t_end=33; %interval and simulation time33: t=0:t_step:t_end;34: wm=zeros(1,length(t))+0.01; %initial value of wm35: v_ms=zeros(1,length(t))+0.0001; %initial value of v36: F_g=0 * wm; % grade resistance37: clear Me;38: dM=18; %load torque in gear39: for k=1:length(t)-140: Me(k)=(wm(k)<=wI) * Mmax...
+((wm(k)>wI)&&(wm(k)<=wII)) * Pn/wm(k)...+(wm(k)>wII) * m_k/(pb * wm(k)+w_2k)^2;
41: F_T(k)=2/d_w * g_i * (Me(k)-dM);42: F_r(k)=mass * g* 0.01 * (1+v_ms(k) * 3.6/161);43: F_DF(k)=1/2 * rho * Cd* A* v_ms(k)^2;44: a(k)=1/mass * (F_T(k)-F_r(k)-F_DF(k)-F_g(k));45: if (wm(k)>wIII) a(k)=0; end46: v_ms(k+1)=v_ms(k)+t_step * a(k); % speed m/s47: wm(k+1)=2 * pi * g_i/(pi * d_w) * v_ms(k);48: end50: Me(k+1)=Me(k); a(k+1)=a(k); %complement the vectors51: F_T(k+1)=F_T(k);F_DF(k+1)=F_DF(k);F_r(k+1)=F_r(k );52: s_pos=zeros(1,length(t));53: for k=2:length(t) %replace: s_pos=t_step * cumsum(v_ms);54: s_pos(k)=t_step * v_ms(k)+s_pos(k-1);55: end;56: %%---- VISUALIZATION------57: figure(2)58: v_kmh=v_ms * 3.6; % convert m/s to kmh59: %p1=plot(t,F_T,t,F_DF,t,F_r,t,F_DF+F_r);60 % yl=ylabel(’Forces’);61: %leg1=legend(’F_T’,’F_{DF}’,’F_r’,’F_{DF}+F_r’);62: %set(leg1,’FontSize’,15)63: %p1=plot(t,a);64: %p1=plot(t,wm);65: p1=plot(t,v_kmh,’k’,[t(1) max(t)],[96.6 96.6],’r’) ;66: yl=ylabel(’v/kmh’);67: %p1=plot(t,s_pos,’k’,[t(1) max(t)],[402.5 402.5],’ r’);68: %yl=ylabel(’s_{pos}/m’);69: grid; axis tight70: set(p1,’LineWidth’,1.5)71: xl=xlabel(’t’);72: set(xl,’FontSize’,15);set(yl,’FontSize’,15);73: set(gca,’FontSize’,12);
W kolejnych liniach powyzszego skryptu znajduje sie:
1÷ 15 parametry pojazdu i strefy charakterystyki sterowania silnikiem indukcyjnym,
17÷ 30 wyswietlenie charakterystyki moment i moc silnika w funkcji predkosci katowej sil-
nika,
32÷ 55 symulacja ruchu pojazdu (metoda Eulera), gdzie t_step = Ts, a t_end jest czasem
symulacji,
57÷ 73 wizualizacja wyników: nalezy odznaczac odpowiednia sekcje, aby uzyskac okreslo-

16 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
ny przebieg. Dla predkosci i połozenia zaznaczono wartosci osiagów pojazdu (0-60mph
i 1/4-mili).
Polecenie: zamiescic przebiegi predkosci i połozenia. Wyznaczyc błedy wzgledne dla uzy-Òskanych wyników (przyspieszenia do 96,6 km/h, czasu i predkosci dla wyscigu na 1/4 mili).✍

2.7. Cwiczenie 1B – modelowanie ruchu pojazdu w srodowisku MATLAB 17
Polecenie: zamiescic przebiegi sił działajacych na pojazd, przyspieszenia pojazdu oraz mo-
mentu elektromagnetycznego silnika (do samodzielnego wykonania). Ò
18 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
2.8. Zadanie dodatkowe
W opracowaniu (Sherman n.d.) zamieszczono zdanie: „With taller gearing, a P85 Model S
might reach 200 mph. Clearly, this is the aerodynamic electric car that merits intense scrutiny
by the world’s carmakers.”
Polecenie: Sprawdzic jaka jest teoretyczna predkosc modelu P85 i czy powyzsze zdanie jest
prawdziwe.✍Ò

2.9. Cwiczenie 1C – modelowanie ruchu pojazdu w srodowisku SIMULINK 19
2.9. Cwiczenie 1C – modelowanie ruchu pojazdu w srodowisku SIMULINK
Celem niniejszego cwiczenia jest realizacja badan symulacyjnych wg schematu blokowego z
rysunku 2.5. Postac graficzna pozwala na pózniejsze rozwazanie układów regulacji momentu
elektromagnetycznego, realizacji układów „cruise-control” (tempomat) oraz kontroli trakcji.
W celu wykonania cwiczenia nalezy zrealizowac schemat przedstawiony na rysunku 2.7. Ï
ÍSekcja Pedał przyspieszenia odpowiedzialna jest za zmienna w czasie procentowa war-
tosc wcisniecia pedału przyspieszenia, lub stałe zadanie stuprocentowego momentu silnika.
Bloki Step z w/w sekcji nalezy uzupełnic w nastepujacy sposób:
Poziom I: Step Time; "czas I", Initial value; "wartosc0*0.01", Final value; "wartoscI*0.01"
Poziom II: Step Time; "czas II", Final value; "wartoscII*0.01"
Poziom III: Step Time; "czas III", Final value; "wartoscIII*0.01"
W bloku Constant (PedalPrzyspieszenia) nalezy wpisac "PedalPrzyspieszenia". Bloki Subsystem
reprezentuja kolejno siłe oporów toczenia, siłe oporów powietrza oraz siłe oporów pochodza-
cych od kata nachylenia terenu. Siły te zostały opisane w rozdziale 2.3.1 niniejszej instrukcji.
Silnik pojazdu został zawarty w bloku Matlab Function. Nalezy go uzupełnic nastepujacym
kodem:
function Me = fcn(wm, ster)
%#codegenMe=((wm<=516) * 600+(wm>516&&wm<=904) * 310000/wm...
+(wm>904) * 1.1627e+09/(2 * wm+33.1)^2) * ster;
Dodatkowo w oknie parametrów symulacji (Model configuration parameters) nalezy usta-
wic: Simulation time-> Stop time: "StopTime", Solver options ->Type: Fixed-step, Fixed-step
size: "MinStepTime".

20
Rozd
zia
ł2
.P
od
sta
wy
na
ped
ów
trak
cy
jny
ch
–siln
ikgłó
wn
yp
oja
zd
uT
ES
LA
MO
DE
LS
P8
5
Pedał przyspieszenia
Siła oporów pochodzących od kąta nachylenia terenuSiła oporów powietrzaSiła oporów toczenia
i
Przełożenie
przekładni
1
s
Integrator1/r_k
Gain1
1/m
Gain2
V
To Workspace
1/(pi*(2*r_k))
Gain3
2*pi
Gain4
i
Przełożenie
przekładni.
Ft
To Workspace2V Fg
Fg
V Fdf
Fdf
V Fr
Fr
Clock
t
To Workspace3
Fg
To Workspace4
Fdf
To Workspace5
Fr
To Workspace6
Me
To Workspace7
wm
To Workspace8
u-18
Sprawność
przekładni
Product
Pe
To Workspace9
u/1000
.
Poziom I
Poziom II
Poziom III
fcn
wm
sterMe
Silnik
1
100%
~= 0
Switch
-C-
PedalPrzyspieszenia
1
Fr1
1
Vm
Gain
g
Gain5
Add
1
Constant1
Product10.01
Constant2
(u*3.6)/161
.1
2
Fdf
2
V1
Vw
Constant
Add1
A
Gain6
Cd
Gain7
rho
Gain8
1/2
Gain9
>=
Switch1
0
Mt dla V=0
u^2
.2
3
Fg
alfa
Constant3
m
Gain10
g
Gain11 >=
Switch2
0
Mt dla V=1
3
V2
u*pi/180
Fcn1
sin(u)
Fcn2
Rysu
nek
2.7
.S
ch
em
at
modelo
wan
iaru
ch
upoja
zdu

2.9. Cwiczenie 1C – modelowanie ruchu pojazdu w srodowisku SIMULINK 21
W celu zadania wartosci poczatkowych Symulacji oraz modelu pojazdu i srodowiska w
którym sie on porusza nalezy napisac nastepujacy program:
1 close all
2 clc3 clear
45 %% Dane silnika
6
7 Pn=310000;8 Mmax=600;
9 pb=2;10 wI=516; %koniec strefy I
11 wII=904; % koniec strefy II
12 w_2k=33.1;13 m_k=1.1627e+09;
1415 %% Dane pojazdu
16
17 i = 9.73; % przekładnia18 d_f = 21; % srednica felgi [in]
19 w_o = 35; % wysoko s c opony [%]20 sz_o = 265; % szeroko s c opony [mm]
21 m = 2195; % masa pojazdu wraz kierowca [kg]
22 Cd= 0.24; % współczynnik oporów powietrza23
2425 %% Nastawy Pedału przyspieszenia
2627 PedalPrzyspieszenia=1; % 1-100%; 0-nastawy własne
28
29 %nastawy własne30 %czasy przełacze n
31 czasI=180;32 czasII=310;
33 czasIII=430;
3435 %procentowa warto s c wci sniecia pedału przyspieszenia
3637 wartosc0=15;
38 wartoscI=50;
39 wartoscII=65;40 wartoscIII=100;
41 wartoscIV=100;42
43 %% Danesrodowska w którym porusza sie pojazd44
45 g = 9.81;

22 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
46 rho= 1.225; % gesto s c powietrza przy 15 * C
47 alfa= 0; % k ˛at nachylenia terenu ( -alfa jazda z góry)
48 Vw= 0; % predko s c oraz kierunek wiatru ( -Vw wiatr zgodny z kierunkiem porusz ajacego49
50 %% Obliczanie pozostałych danych pojazdu51
52 r_w = (((d_f * 2.54) * 10^(-2))+(((w_o * sz_o) * 10^(-5)) * 2))/2; % promie n koła53 A = 6.2/((3.281)^2)/Cd; % pole powieszchni czołowej poja zdu
54
55 %% Dane symulacji oraz wy swietlenie wykresów56
57 StopTime=560;58 MinStepTime=0.01;
59 sim(’Tesla_simulinkV2.slx’)
6061 %Ch=ka sił oraz predko sci
62 figure(1)63 subplot(1,2,1)
64 plot(t,Fr,t,Fdf,t,Fg,t,Ft,t,Fdf+Fr+Fg);
65 legend(’Fr’,’F_{DF}’,’Fg’,’F_T’,’F_{SUM}’);66 ylabel(’F[Nm]’);
67 xlabel(’t[s]’);68 grid on
69 subplot(1,2,2)70 plot(t,V * 3.6)
71 ylabel(’V[km/h]’);
72 xlabel(’t[s]’);73 grid on
7475 % Ch-ka silnika
76 figure(2)
77 plot(wm * 9.5492,Me,wm * 9.5492,Pe);78 legend(’Nm’,’kW’);
79 ylabel(’M[Nm],P[kW]’);80 xlabel(’\omega_m[obr/min]’);
81 grid on;
W kolejnych liniach powyzszego skryptu znajduja sie:
7 ÷ 13 parametry silnika trakcyjnego,
17 ÷ 22 szczegółowe dane pojazdu,
16 ÷ 40 nastawy pedału przyspieszenia pojazdu (zadawanie momentu elektromagnetycz-
nego),
42 ÷ 47 dane srodowiska w którym porusza sie pojazd,
51 ÷ 52 niezbedne obliczenia pozostałych danych pojazdu,
56 ÷ 58 zadanie parametrów symulacji,
61 ÷ 72 wyswietlenie charakterystyk sił działajacych na pojazd oraz predkosci pojazdu w
funkcji czasu,
75 ÷80 wyswietlenie charakterystyk silnika pojazdu.

2.9. Cwiczenie 1C – modelowanie ruchu pojazdu w srodowisku SIMULINK 23
Zamiescic otrzymane wyniki symulacji i odpowiedziec na pytanie: Jaka odległosc przeje-
dzie pojazd w kazdym przypadku, jesli pojemnosc jego akumulatorów wynosi 85kWh? Ò
✍

24 Rozdział 2. Podstawy napedów trakcyjnych – silnik główny pojazdu TESLA MODEL S P85
Wprowadzic do symulacji 5% nachylenie terenu (α = 5% · π4). Zamiescic otrzymane wyniki
symulacji i odpowiedziec na pytanie: Jaka odległosc przejedzie pojazd w kazdym przypad-
ku, jesli pojemnosc jego akumulatorów wynosi 85kWh?Ò
✍

Rozdział 3
Charakterystyki mechaniczne silnika
indukcyjnego – silnik trakcyjny
Celem cwiczenia jest zapoznanie sie z mozliwosciami regulacyjnymi silników indukcyjnych,
które mozna wykorzystac w pojazdach samochodowych. W ramach cwiczenia wyznaczane zo-
stana charakterystyki mechaniczne w róznych układach współrzednych i przy róznym zasila-
niu silnika.
3.1. Wprowadzenie
Podstawowym równaniem okreslajacym mozliwosci regulacyjne silnika indukcyjnego jest:
ωm =2πƒ1
pb(1 − S) (3.1)
Dla silnika indukcyjnego klatkowego mozna wyróznic kilka sposobów regulacji predkosci
katowej, polegajacych na zmianie warunków zasilania lub parametrów silnika, sa to:
• zmiana poslizgu S,
• zmiana liczby par biegunów pb,
• zmiana czestotliwosci za pomoca przemienników czestotliwosci (napieciowych lub prado-
wych), najczesciej zmiana czestotliwosci jest zwiazana z równoczesna zmiana napiecia.
Zastosowanie przemienników czestotliwosci daje mozliwosc niezaleznej zmiany napiecia i cze-
stotliwosci, czyli istnieje mozliwosc S = r (regulacja napieciowa przy stałej czestotliwosci ƒ1)
lub US = ƒ (ƒ1).
W cwiczeniu wykorzystuje sie uproszczone zaleznosci opisujace charakterystyke mecha-
niczna silnika, które zostały podane w rozdziale 2.2, czyli (RS ≈ 0)
Me =
2MKN
�ϰ
ϕ
�2
S
SK+SK
S
(3.2)
US,ω1 jest odpowiednio napieciem stojana i jego czestotliwoscia. Wprowadza sie jednostki
wzgledne w postaci ϕ =ω1
ω1N, ϰ =
USUSN
.
Na podstawie (3.2) mozna wykreslic charakterystyke naturalna (znamionowe warunki za-
silania) i przykładowa charakterystyka została przedstawiona na rysunku 3.1. Na rysunku
przedstawiona została charakterystyka ωm(Me), gdzie uwzgledniono równiez os poslizgu.

26 Rozdział 3. Charakterystyki mechaniczne silnika indukcyjnego – silnik trakcyjny
praca silnikowa
0
s
sK
1
praca generatorowa sN
0
Rysunek 3.1. Charakterystyka mechaniczna silnika indukcyjnego
3.2. Cwiczenie 2 – charakterystyki mechaniczne silnika indukcyjnego
Parametry silnika o dwóch parach biegunów (pb = 2) wskazuja, ze wartosci charaktery-
styczne w równaniu Klossa to:
ω1N = 1042 rad/s⇒ ƒ1N = 165,8 Hz⇒ SK =ω2K
ω1N
= 3,17
oraz MKN = 1070Nm i predkosc znamionowa nN = 4930obr/min przy momencie znamiono-
wym MeN = 600Nm. Nalezy równiez przyjac, ze USN = 400V.

3.2. Cwiczenie 2 – charakterystyki mechaniczne silnika indukcyjnego 27
Polecenie: Przekształcic równanie Klossa, tak aby napisac skrypt wyznaczajacy charakte-
rystyke mechaniczna. ÏZamiescic naturalna charakterystyke mechaniczna silnika jako nastepujace funkcje ωm(Me),
Me(ωm), Me(S), S(Me) (zmiana osi układu współrzednych). Ò

28 Rozdział 3. Charakterystyki mechaniczne silnika indukcyjnego – silnik trakcyjny
Polecenie: Zmodyfikowac wczesniejszy program, tak aby narysowac rodzine charaktery-
styk dla zakresu 0-16000 obr/min. Nalezy uwzglednic 3 strefy regulacji.ÏZamiescic charakterystyke mechaniczna jako nastepujace funkcje ωm(Me),Me(ωm). Po-
równac uzyskane wyniki z charakterystyka z rysunku 2.6.Ò

Rozdział 4
Silnik BLDC – sterowanie predkoscia i połozeniem
Celem cwiczenia jest zapoznanie sie z działaniem silników BLDC (bezszczotkowe silniki
pradu stałego), które naleza do grupy silników synchronicznych pradu przemiennego (dzia-
łanie). Sprzecznosc nazw i działania samego silnika wynika z faktu: jesli falownik zasilajacy
silnik uznaje sie za komutator elektroniczny, to działanie silnika widziane od strony obwodu
posredniczacego przemiennika czestotliwosci przypomina silnik pradu stałego.
Ponadto cwiczenie ma przyblizyc działanie układów regulacji automatycznej dowolnymi
napedami elektrycznymi: regulacja predkosci oraz połozenia (serwonaped). W takich rozwia-
zaniach wykorzystuje sie regulacje kaskadowa.
Regulacja predkosci przedstawiana w cwiczeniu nie rózni sie niczym od systemów typu
tempomat (cruise-control) stosowanych w samochodach. Równiez musi byc stosowana w po-
jazdach autonomicznych.
4.1. Budowa i działanie silnika BLDC
Stojan silnika BLDC składa sie z trójfazowego uzwojenia, którego fazy sa przesuniete o kat2π
3.
Uzwojenie kazdej fazy rozłozone jest na obwodzie stojana co katπ
3i najczesciej sa one poła-
czone w gwiazde.
a)
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
A
A'
C'
B
B'
C
N
S
iSA
+
iSC
–
b)
ψSA
ψSCψS
Rysunek 4.1. Rozkład uzwojen stojana silnika BLDC: a) przekrój porzeczny i kierunek linii
pola magnetycznego wytwarzanego przez uzwojenia stojana,
b) umowny schemat ideowy
Typowy rozkład uzwojen stojana został przedstawiony na rysunku 4.1a (Sieklucki 2009,
Sieklucki et al. 2014). Poczatek kazdego uzwojenia został oznaczony jako A,B,C natomiast

30 Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem
koniec jako A’,B’,C’. Konce poszczególnych uzwojen sa połaczone i tworza punkt gwiazdowy.
Liniami przerywanymi zaznaczono obszar rozłozenia poszczególnych uzwojen ma obwodzie
stojana. Te same linie zostały zamieszczone równiez na rysunku 4.1b, który przedstawia stojan
silnika bezszczotkowego w postaci schematycznej.
Na rysunku 4.1a przedstawiono równiez zasade powstawania pola magnetycznego stojana
Wirnik składa sie z magnesu trwałego, wytwarzajacego jednolita indukcje magnetyczna B.
Stosuje sie rózne typy magnesów jak np. ferrytowe czy alnico (AlNiCo) oraz wykonane z pier-
wiastków ziem rzadkich – to jest SmCo, czy NdFeB (Hendershot & Miller 1994).
W przypadku silników BLDC mozna okreslic maksymalna wartosc SEM emx indukowanej
w uzwojeniu stojana (wartosc chwilowa), gdy biegun N wirnika znajduje sie w całosci nad
czescia A uzwojenia, a biegun S nad czescia A’ tego samego uzwojenia. W pozostałych przy-
padkach SEM zmienia sie w sposób liniowy (rys. 4.2).
Przesuniecie pomiedzy przebiegami poszczególnych faz uzwojenia wynosi2π3
. SEM zmienia
sie od emx do −emx, czyli koncowy wzór na SEM mozna otrzymac w nastepujacej postaci:
ERMS = kEω (4.1)
Typowo (Hendershot & Miller 1994) dla silników BLDC podaje sie współczynnik kE (sta-
ła siły elektromotorycznej), który okresla wartosc skuteczna miedzyfazowej SEM. Natomiast
w okresleniu momentu elektromagnetycznego silnika pomocne jest wykorzystanie stałej mo-
mentu kt. Wówczas moment elektromagnetyczny wynosi:
Me = kt (4.2)
N
S
iSA
iSBiSC −60 0 60 120 180 240 300 360 420 480
e_min
0
e_max
Kat ustawienia wirnika α[ o]
SE
M e
A [V
]
0o
Rysunek 4.2. Indukowanie SEM w uzwojeniu stojana w silniku BLDC
Silniki synchroniczne z magnesem trwałym zasilane sa najczesciej przez falownik (rys. 4.3).
Tranzystory sterowane sa przez układ komutacji elektronicznej z zastosowaniem modulacji
szerokosci impulsów (PWM).
Podczas pracy falownika dochodzi do komutacji szesciostopniowej, która jest potrzebna
do uzyskania własciwego momentu elektrycznego Me. Szesc stopni komutacji odpowiada 2π
radianom elektrycznym obrotu. W chwili przełaczania (komutacji) jedno z dwóch przewodza-
cych uzwojen jest wyłaczane, a dotychczas nieprzewodzace właczane. Dzieki temu w kazdej
chwili zasilane sa dwa uzwojenia, podczas gdy trzecie pozostaje niezasilane (swobodne).

4.1. Budowa i działanie silnika BLDC 31
Q1
Q2
Q3
Q4
Q5
Q6
a
a’
b
b’
c
c’
N
S
Układ sterowania
a a’ b b’ c’c
Pomiar lub estymacja
położenia wirnika
Rysunek 4.3. Schemat układu zasilania silnika bezszczotkowego (BLDC lub PMSM)
Kolejne chwile komutacji oddalone sa od siebie oπ
3radianów elektrycznych. Do prawidłowego
sterowania procesem komutacji niezbedna jest znajomosc szesciu połozen wirnika.
Model matematyczny silnika BLDC wyprowadza sie na podstawie schematu zastepczego
przedstawionego na rysunku 4.4, który uzupełnia sie o funkcje falownika napiecia.
Ud
2
Ud
2
I
eA
LS
RS
eCLS
RS
eB
LS
RS
iSB
iSC
iSA
uSA
uSB
uSC
Rysunek 4.4. Schemat zastepczy napedu z silnikiem BLDC
W wyznaczeniu modelu matematycznego samego silnika przyjmuje sie nastepujace załoze-
nia (Krishnan 2001, Bose 2002):
• budowa stojana jest symetryczna, tzn. parametrami uzwojen sa: RS rezystancja stojana, LSindukcyjnosc własna, Lμ = LAB = LBC = LCA indukcyjnosc wzajemna,
• prady stojana spełniaja zaleznosc SA + SB + SC = 0,
• obwody magnetyczne sa liniowe (brak nasycen i histerezy magnesowania).

32 Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem
Wówczas dynamike samego silnika zapisuje sie w postaci równania macierzowego:
SASBSC
=
LS − Lμ 0 0
0 LS − Lμ 0
0 0 LS − Lμ
dSA/dt
dSB/dt
dSC/dt
+
RS 0 0
0 RS 0
0 0 RS
SASBSC
+
eAeBeC
(4.3)
Na rysunku 4.5 przedstawione zostały przebiegi pradów stojana oraz SEM indukowanej
w uzwojeniach podczas pracy ze stała predkoscia katowa.
Po uwzglednieniu zasad sterowania (w jednej chwili zasilane sa dwa uzwojenia stojana) oraz
modulacji szerokosci impulsów napiecia zasilajacego (U = dUd, gdzie d jest współczynnikiem
modulacji, U jest wartoscia srednia napiecia stojana) dla przykładowego przepływu pradu
z uzwojenia A do B (kat połozenia wirnika −60 ÷ 0o na rys. 4.5) zapisuje sie:
SA = , SB = −, SC = 0, SA =1
2U, SB = −
1
2U, SC = 0 (4.4a)
−60 0 60 120 180 240 300 360 420 480
eC − eA
eB − eC
eA − eB
eC , iSC
eB , iSB
eA, iSA
Kat ustawienia wirnika α[ o]
E
I
Rysunek 4.5. Przebiegi pradów (- - -) i SEM (—) silnika BLDC
Podczas załozonego przepływu pradu SEM indukowana w uzwojeniach A i B jest w postaci:
eA =1
2E, eB = −
1
2E (4.4b)

4.1. Budowa i działanie silnika BLDC 33
i po podstawieniu zaleznosci (4.4) do równania (4.3) otrzymuje sie układ równan:
1
2U(t) = RS(t) +
d(t)
dt(LS − Lμ) +
1
2E(t)
−1
2U(t) = −RS(t) −
d(t)
dt(LS − Lμ) −
1
2E(t)
(4.5)
Po odjeciu stronami równan (4.5) i zdefiniowaniu rezystancji i indukcyjnosci twornika silnika
jako:
R = 2RS, L = 2(LS − Lμ) (4.6)
uzyskuje sie model napedu w postaci:
U(t) = R(t) + Ld(t)
dt+ E(t) (4.7)
Strumien wytwarzany przez wirnik silnika (odpowiednik strumienia skojarzonego twornika
dla silnika obcowzbudnego) wyznacza sie na podstawie stałej momentu kt lub stałej SEM kE.
Współczynniki te sa podawane na tabliczce znamionowej lub w karcie katalogowej i sa zwy-
kle wyrazane w
�Nm
A(RMS)
�
. W zwiazku z tym konieczne jest przeliczenie wartosci skutecznych
na szczytowe, co dla przebiegu trapezoidalnego (SEM miedzyfazowa) lub prostokatnego (prad
fazowy) przedstawionego na rysunku 4.5 okresla sie zaleznoscia
ψe = kt
√√√2
3= kE
√√√2
3(4.8)
Wówczas kompletny model matematyczny, z uwzglednieniem (4.7), zapisuje sie w postaci:
U(t) = R(t) + ψeω(t) + Ld(t)
dt
Jdω(t)
dt= Me(t)− Mm(t)
Me(t) = ψe(t)
E(t) = ψeω(t)
(4.9)
Z powyzszych zaleznosci widac, ze prad w obwodzie posredniczacym przemiennika cze-
stotliwosci oznacza wartosc szczytowa pradu stojana silnika (N =
√√3
2N(RMS), gdzie wartosc
N(RMS) jest podawana na tabliczce znamionowej lub karcie katalogowej maszyny).
Równania (4.9) sa w identycznej postaci jak model matematyczny silnika obcowzbudnego.
Oznacza to, ze w opisie dynamiki silnika BLDC mozna takze wyróznic dwie standardowe stałe
czasowe:
• elektromagnetyczna T =L
R,
• elektromechaniczna B = JR
ψ2e
.

34 Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem
4.2. Wykorzystanie czujników Halla
Czujniki Halla maja szerokie zastosowanie w silnikach BLDC. Umieszcza sie je na obwodzie
stojana i słuza one do okreslania połozenia wirnika na potrzeby komutatora elektronicznego.
Na podstawie kombinacji sygnałów pochodzacych z trzech przetworników rozmieszczonych co
120o elektrycznych nastepuje szesciostopniowa komutacja pradu (rys. 4.6).
A B C N
0 0 1 1
0 1 1 3
0 1 0 2
1 1 0 6
1 0 0 4
1 0 1 5
a
N
0 360°-.. -
.
.1 6
Ka
α
Rysunek 4.6. Tor pomiaru połozenia
Asymetria w rozmieszczeniu czujników Halla wpływa na rozwijany moment elektryczny,
a ten z kolei przenosi sie na wał silnika w postaci drgan w stanie ustalonym. Porównanie
przebiegów pradu, momentu i predkosci dla poprawnie i niepoprawnie rozmieszczonych prze-
tworników hallotronowych (dwa czujniki przesuniete o 10°) przedstawiono na rysunkach 4.7
i 4.8.
0 0.05 0.1 0.15 0.2 0.25 0.3
0
150
0
15
−10
0
10
t [s] ω
[ra
d/s
],
Me [
Nm
]
i S
A,
i SB
, i S
C [
A]
Rysunek 4.7. Przebiegi przy symetrycznie rozmieszczonych hallotronach
Typowe rozmieszczenia tych czujników zostały przedstawione na rysunku 4.9. Dla rozkładu
jak na rysunku 4.9a czujniki znajduja sie pomiedzy uzwojeniami (A,C’), (B,A’), (C,B’).

4.3. Naped z silnikiem BLDC 35
0 0.05 0.1 0.15 0.2 0.25 0.3
0
150
0
15
−10
0
10
t [s] ω
[ra
d/s
],
Me [
Nm
]
i S
A,
i SB
, i S
C [
A]
Rysunek 4.8. Przebiegi przy niesymetrycznie rozmieszczonych hallotronach
iSA
a)
iSBiSC
A
B
C
iSA
b)
iSBiSC
A
B
C
iSA
c)
iSBiSC
A B
C
Rysunek 4.9. Typowe rozkłady czujników hallotronowych wzgledem uzwojen stojana
Zmiana stanu na dowolnym czujniku jest sygnałem dla układu sterujacego falownikiem
o koniecznosci przeprowadzenia komutacji.
Dla rozkładu czujników jak na rysunku 4.9a przebiegi sygnałów z kolejnych trzech czujni-
ków Halla w połaczeniu z przebiegami odpowiednich pradów i SEM przedstawia rysunek 4.10
(Sieklucki 2009).
W silnikach BLDC czujniki Halla sa przetwornikami absolutnymi – umozliwiaja okreslenie
połozenia wirnika przy zerowej predkosci obrotowej.
4.3. Naped z silnikiem BLDC
Układy sterowania predkoscia katowa sa projektowane z wykorzystaniem kaskadowej struk-
tury regulacji napedu pradu stałego. Układem zasilajacym jest tu najczesciej falownik napiecia
(rys. 4.3), którego sterowanie jest realizowane technika PWM. W układach, których zadaniem
36 Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem
−60 0 60 120 180 240 300 360 420 480
C
B
A
α[ o]
Uzw
ojen
ia s
ilnik
a eA
Hall AiSA
Hall B
Hall C
iSB
iSC
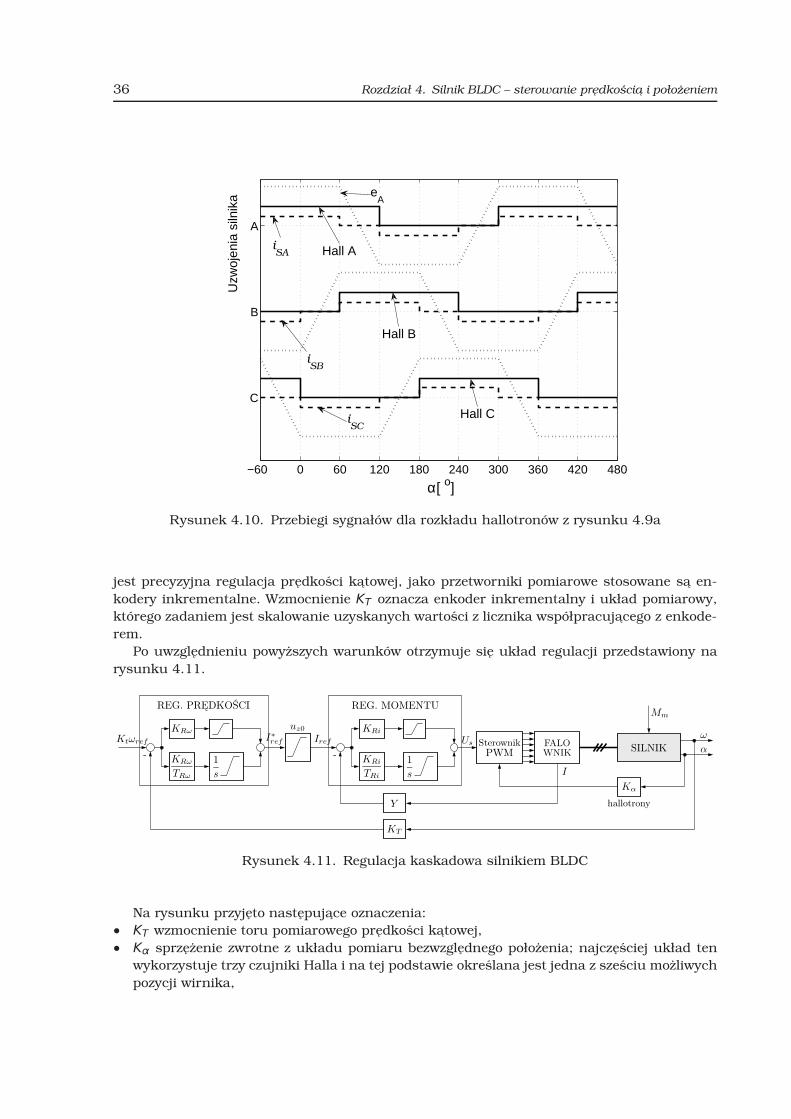
Rysunek 4.10. Przebiegi sygnałów dla rozkładu hallotronów z rysunku 4.9a
jest precyzyjna regulacja predkosci katowej, jako przetworniki pomiarowe stosowane sa en-
kodery inkrementalne. Wzmocnienie KT oznacza enkoder inkrementalny i układ pomiarowy,
którego zadaniem jest skalowanie uzyskanych wartosci z licznika współpracujacego z enkode-
rem.
Po uwzglednieniu powyzszych warunków otrzymuje sie układ regulacji przedstawiony na
rysunku 4.11.
Ktωref
KRω
KRω
TRω
1
s
REG. PRĘDKOŚCI
I∗
ref
uz0
Iref
KRi
KRi
TRi
1
s
REG. MOMENTU
Us SterownikPWM
FALOWNIK
SILNIKω
α
Mm
I
Y
-
KT
-
Kα
hallotrony
Rysunek 4.11. Regulacja kaskadowa silnikiem BLDC
Na rysunku przyjeto nastepujace oznaczenia:
• KT wzmocnienie toru pomiarowego predkosci katowej,
• Kα sprzezenie zwrotne z układu pomiaru bezwzglednego połozenia; najczesciej układ ten
wykorzystuje trzy czujniki Halla i na tej podstawie okreslana jest jedna z szesciu mozliwych
pozycji wirnika,

4.4. Cwiczenie 3A – regulacja predkosci i połozenia silników BLDC 37
• Y wzmocnienie toru pomiarowego pradu w obwodzie posredniczacym.
4.4. Cwiczenie 3A – regulacja predkosci i połozenia silników BLDC
W ramach cwiczenia rejestrowane sa przebiegi napedu: prady, predkosc, połozenie, sygnały
z czujników Halla.
REGULACJA PREDKOSCI KATOWEJ.
Polecenie: Zamiescic strukture uruchamianego układu oraz przebiegi dla rozruchu, na-
wrotu i hamowania silnika. Przebiegi musza byc przeliczone do amperów i obrotów na minute.
Ò

38 Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem
REGULACJA DROGI KATOWEJ.
Polecenie: Zamiescic strukture uruchamianego układu oraz przebiegi dla załozonego za-
dania regulacji. Przebiegi musza byc przeliczone do amperów i obrotów na minute.Ò

4.5. Cwiczenie 3B – badania symulacyjne układu napedowego z silnikiem BLDC 39
4.5. Cwiczenie 3B – badania symulacyjne układu napedowego z
silnikiem BLDC
W sterowaniu silnikiem BLDC, w celu generacji najwiekszej wartosci momentu elektro-
magnetycznego przeprowadza sie synchronizacje prostokatnych przebiegów pradów stojana
z przebiegami trapezoidalnych SEM. Oznacza to, ze silniki BLDC sa silnikami synchronicznymi
i przebieg pradu jest zdeterminowany przebiegiem SEM.
W przypadku trzech faz (A, B, C) zapisuje sie:
Meω = eA A+ eB B+ eC C (4.10)
i wprowadzajac odpowiednio k =e
ω, otrzymuje sie (Hanselman 2003):
Me(α) = kA(α) A(α) + kB(α) B(α) + kC(α) C(α) (4.11)
W silniku trójfazowym o jednakowych uzwojeniach SEM oraz prady maja taki sam kształt
w kazdej fazie, ale sa przesuniete w kazdym uzwojeniu o γ =2π
3, czyli
Me = kA(α) A(α) + kA(α − γ) A(α − γ) + kA(α + γ) A(α + γ) (4.12)
−60 0 60 120 180 240 300 360 420 480
0
e_min
0
e_maxe_min
0
e_maxe_min
0
e_max
Kat ustawienia wirnika α [ o]
A
Me
C
B
Rysunek 4.12. Idealne przebiegi pradów (− − −), SEM oraz momentu
elektromagnetycznego dla silników BLDC

40 Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem
W silnikach BLDC, jak wspomniano, SEM ma przebieg trapezoidalny, a prady fazowe prze-
bieg zblizony do prostokatnych impulsów. Do wyjasnienia mechanizmu powstawania ideal-
nego momentu elektromagnetycznego mozna posłuzyc sie równaniem (4.12), jednak najłatwiej
jest to przedstawic graficznie (rys. 4.12).
Na rysunku 4.12 zaprezentowano przebieg siły elektromotorycznej SEM dla trzech faz
(Hendershot & Miller 1994) (odpowiednio A, B i C) oraz odpowiadajace im impulsy prosto-
katne pradu . Odpowiedni prad fazowy zgadza sie co do znaku z fazowa SEM i właczany jest
wtedy, gdy SEM ma wartosc stała. W wyniku tego powstaje stały moment elektryczny Me. Jak
łatwo zauwazyc, w kazdej chwili prad płynie tylko w dwóch uzwojeniach, podczas gdy trzecie
uzwojenie jest swobodne (nie jest zasilane). W czasie pełnego obrotu (360o elektrycznych) jest
szesc takich róznych właczen pradu (sekwencji sterujacych – komutacji).
Podsumowujac, mozna stwierdzic, ze jesli amplituda pradu stojana wynosi , to otrzymuje
sie wyrazenie:
Me(α) = kE (4.13)
czyli moment elektryczny jest stały i proporcjonalny do amplitudy pradu. Oczywiscie w rze-
czywistych układach napedowych taki idealny moment elektryczny jest niemozliwy do zreali-
zowania. Pojawia sie tam zjawisko pulsacji momentu.
W ramach cwiczenia nalezy zrealizowac schemat (wykorzystac AC7_example z biblioteki
SimPowerSystems) jak na rysunku 4.13, gdzie w celu eliminacji działania falownika (komuta-
tora elektronicznego) zastosowano filtry pradów i SEM.Í
Ï
AC7 - Brushless DC Motor Drive During Speed Regulation
Discrete,
Ts = 2e-06 s.
powergui
PI gain calculator
?
SPMotor
Conv.
Ctrl
A
B
C
AC7
Tm
Wm
Brushless DC Motor Drive
A
B
C
220V 60Hz
Speed
Torque
-K-
Scope4
Scope5
Scope6
Speed-Torque curve
Scope1
Product
Product1
Product2
DividePorownanie1
0.0005s+1
Transfer Fcn1
1
0.0005s+1
Transfer Fcn2
1
0.0005s+1
Transfer Fcn3
1
0.0005s+1
Transfer Fcn4
1
0.0005s+1
Transfer Fcn5
1
0.0005s+1
Transfer Fcn6
<Hall effect signal h_c>
<Hall effect signal h_a>rpm
<Stator back EMF e_b (V)>
<Stator current is_b (A)>
<Hall effect signal h_b>
<Rotor speed wm (rad/s)>
<Stator back EMF e_cV)>
<Stator current is_a (A)>
<Electromagnetic torque Te (N*m)>
<Rotor angle thetam (rad)>
<Stator back EMF e_a (V)>
<Stator current is_c (A)>
Rysunek 4.13. Schemat modelu napedu z silnikiem BLDC
W bloku Speed nalezy wpisac czasy [0 1] i zadane wartosci predkosci [600 200], natomiast
w bloku Torque czas 0.8s właczenia momentu obciazenia o wartosci 11Nm. Wówczas w bloku
Porownanie mozna zaobserwowac wpływ przełaczania pradów stojana na przebieg momentu
elektromagnetycznego. Czas symulacji powinien wynosic 1.5s.

4.5. Cwiczenie 3B – badania symulacyjne układu napedowego z silnikiem BLDC 41
Samodzielnie opracowac wyniki symulacji: predkosc, prady stojana i moment elektroma-
gnetyczny. Zaznaczyc czas obciazenia udarowego. Ò

42 Rozdział 4. Silnik BLDC – sterowanie predkoscia i połozeniem
Przedstawic powiekszenie przebiegów: pradów stojana i momentu elektromagnetycznego
dla zakresu stabilizacji predkosci. Napisac: Dlaczego nie stosuje sie silników BLDC jakoÒgłównych napedów trakcyjnych?.✍

Dodatek A
Własne notatki


Bibliografia
Bisztyga, K. (1989), Sterowanie i regulacja silników elektrycznych, Warszawa, WNT.
Boldea, I. & Nasar, S. (1999), Electric Drives, Boca Raton, CRC Press.
Boldea, I. & Nasar, S. (2002), The Induction Machine Handbook, Boca Raton, CRC Press.
Bose, B. (2002), Modern Power Electronics and AC Drives, NJ,Prentice Hall.
Chiasson, J. (2005), Modeling and High-Performance Control of Electric Machines, NJ, Wiley-IEEE Press.
De Doncker, R., Pulle, D. & Veltman, A. (2011), Advanced Electrical Drives: Analysis, Modeling, Control,
Dordrecht, Springer Science+Business Media B.V.
Drozdowski, P. (1998), Wprowadzenie do napedów elektrycznych, Kraków, Politechnika Krakowska.
Feynman, R., Leighton, R. & Sands, M. (2013), Feynmana wykłady z fizyki. Tom 1.1, Warszawa, Wydaw-
nictwo Naukowe PWN.
Gillespie, T. (1992), Fundamentals of Vehicle Dynamics, Society of Automotive Engineers.
Hanselman, D. (2003), Brushless Permanent Magnet Motor Design – Second Edition, Cranston, The Wri-
ters’ Collective.
Hendershot, J. & Miller, T. (1994), Design of Brushless Permanent-Magnet Motors, NY, Magna Physics
Publishing and Oxford.
Kazmierkowski, M. & Tunia, H. (1994), Automatic Control of Converter-Fed Drives, Amsterdam, Elsevier.
Kazmierkowski, M., Wójcik, P., Swierczynski, D. & Janaszek, M. (2008), ‘Direct torque and flux control
for PWM inverter fed induction motor drive for electrical tram transportation’, Przeglad Elektrotech-
niczny 12, 115–118.
Krishnan, R. (2001), Electric Motor Drives. Modelling, Analysis and Control, Upper Saddle River, Prentice
Hall.
Leonhard, W. (2001), Control of Electrical Drives, Berlin, Springer-Verlag.
Nam, K. (2010), AC Motor Control and Electrical Vehicle Applications, CRC Press.
Novotny, D. W. & Lipo, T. A. (1996), Vector Control and Dynamics of AC Drives, Oxford University Press.
Plunkett, A. (1977), ‘Direct flux and torque regulation in a PWM inverter-induction motor drive’, IEEE
Transactions on Industry Applications 13(2), 139–146.
Plunkett, A. B. & Lipo, T. A. (1976), ‘New methods of induction motor torque regulation’, IEEE Transac-
tions on Industry Applications IA-12(1), 47–55.
Plunkett, A. & Plette, D. (1977), ‘Inverter-induction motor drive for transit cars’, IEEE Transactions on
Industry Applications 13(1), 26–37.
Sherman, D. (n.d.), ‘Drag queens. five slippery cars enter a wind tunnel; one slinks out a winner.’,
https://www.tesla.com/sites/default/files/blog_atta chments/the-slipperiest-car-on-the-road.pdf .
Sieklucki, G. (2009), Automatyka napedu, Kraków, Wydawnictwa AGH.
Sieklucki, G. (2017), ‘Investigation into the Induction Motor in the Tesla Model S’, xxxxxx xxxx(....), zgło-
szony do druku.
Sieklucki, G., Bisztyga, B., Zdrojewski, A., Orzechowski, T. & Sykulski, R. (2014), Modele i zasady stero-
wania napedami elektrycznymi, Kraków, Wydawnictwa AGH.
Skwarczynski, J. & Tertil, Z. (2000), Elektromechaniczne przetwarzanie energii, Kraków, Wydawnictwa
AGH.
Sul, S. (2011), Control of Electric Machine Drive Systems, Hoboken, Wiley.
Szklarski, L., Dziadecki, A., Strycharz, J. & Jaracz, K. (1996), Automatyka napedu elektrycznego, Kra-
ków, Wydawnictwa AGH.

46 Bibliografia
Taylor, J. (2012), Mechanika klasyczna, Warszawa,Wydawnictwo Naukowe PWN.
Trzynadlowski, A. (2000), Control of Induction Motors, Academic Press, San Diego.
Tunia, H. & Kazmierkowski, M. (1983), Podstawy automatyki napedu elektrycznego, Warszawa, WNT.