T. Jurlewicz, Z. Skoczylas - Algebra Liniowa 2 - Definicje, Twierdzenia, Wzory.pdf
Twierdzenia o wzajemności

Praca - definicja
Praca – iloczyn skalarny wektora siły i wektora drogi jaką pokonuje punkt materialny pod wpływem działania tej siły.
)(sFr
sdr
S
)(sFr
sdr
S
( )αcos)()( sFsF ss
rr=( )∫
∫
=
==
S
S
dssF
sdsFL
αcos)(
)(
r
ro
r
α
Praca zewnętrzna
1rr
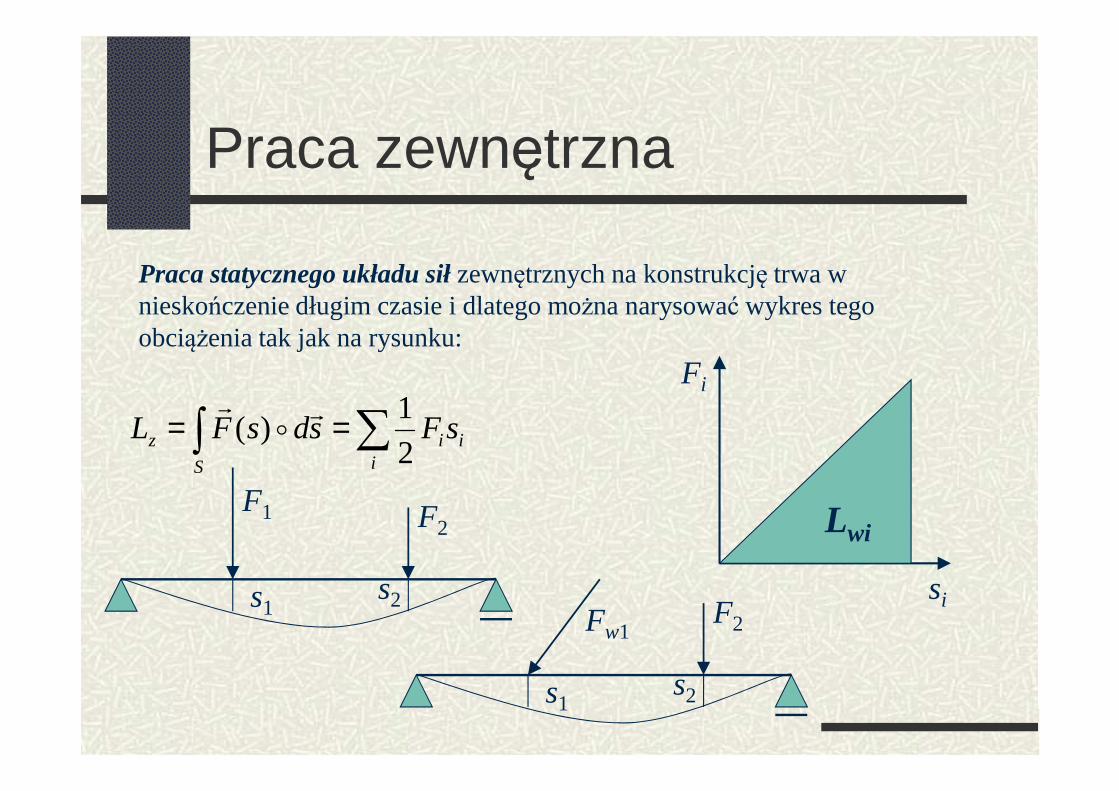
Praca statycznego układu siłzewnętrznych na konstrukcję trwa w nieskończenie długim czasie i dlatego można narysować wykres tego obciążenia tak jak na rysunku:
Fi
∑∫ ==i
ii
S
z sFsdsFL2
1)(
ro
r
si
LwiF1 F2
s1s2
Fw1F2
s1s2
Praca zewnętrzna sił
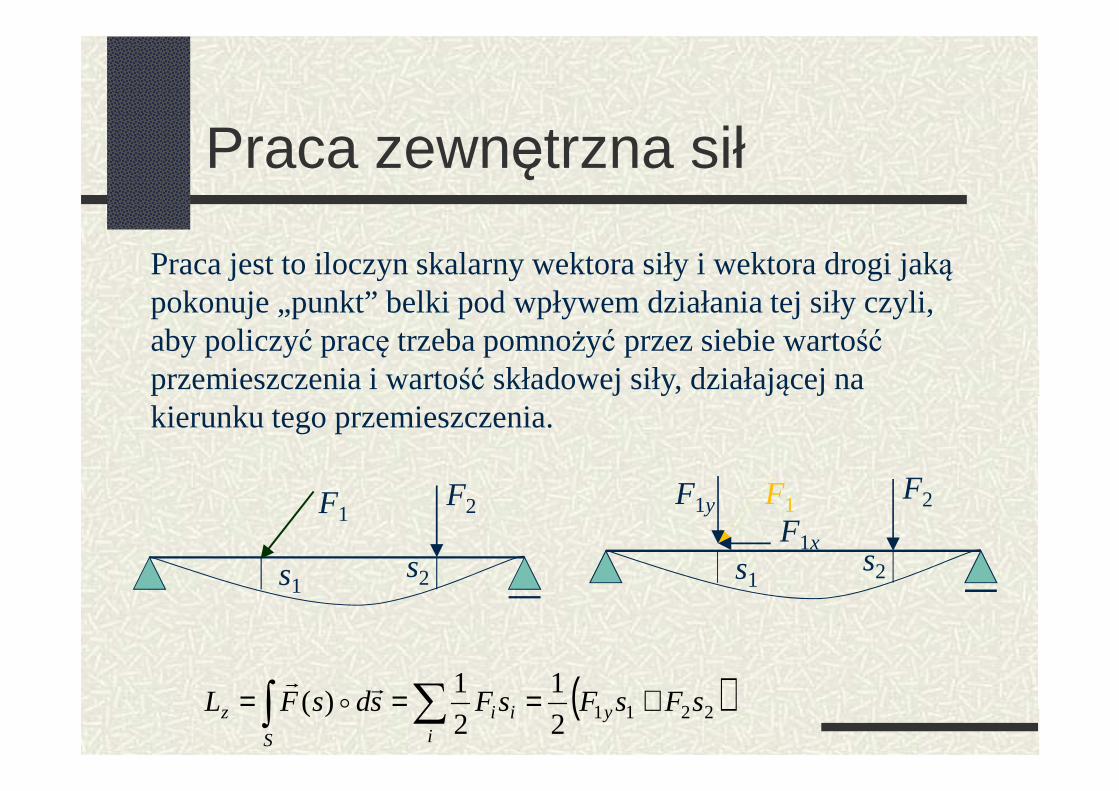
Praca jest to iloczyn skalarny wektora siły i wektora drogi jaką pokonuje „punkt” belki pod wpływem działania tej siły czyli, aby policzyć pracę trzeba pomnożyć przez siebie wartość przemieszczenia i wartość składowej siły, działającej na
( )22112
1
2
1)( sFsFsFsdsFL y
iii
S
z +=== ∑∫r
or
F1F2
s1s2
F1F2
s1s2
F1y
F1x
przemieszczenia i wartość składowej siły, działającej na kierunku tego przemieszczenia.
Praca zewnętrzna sił i momentów
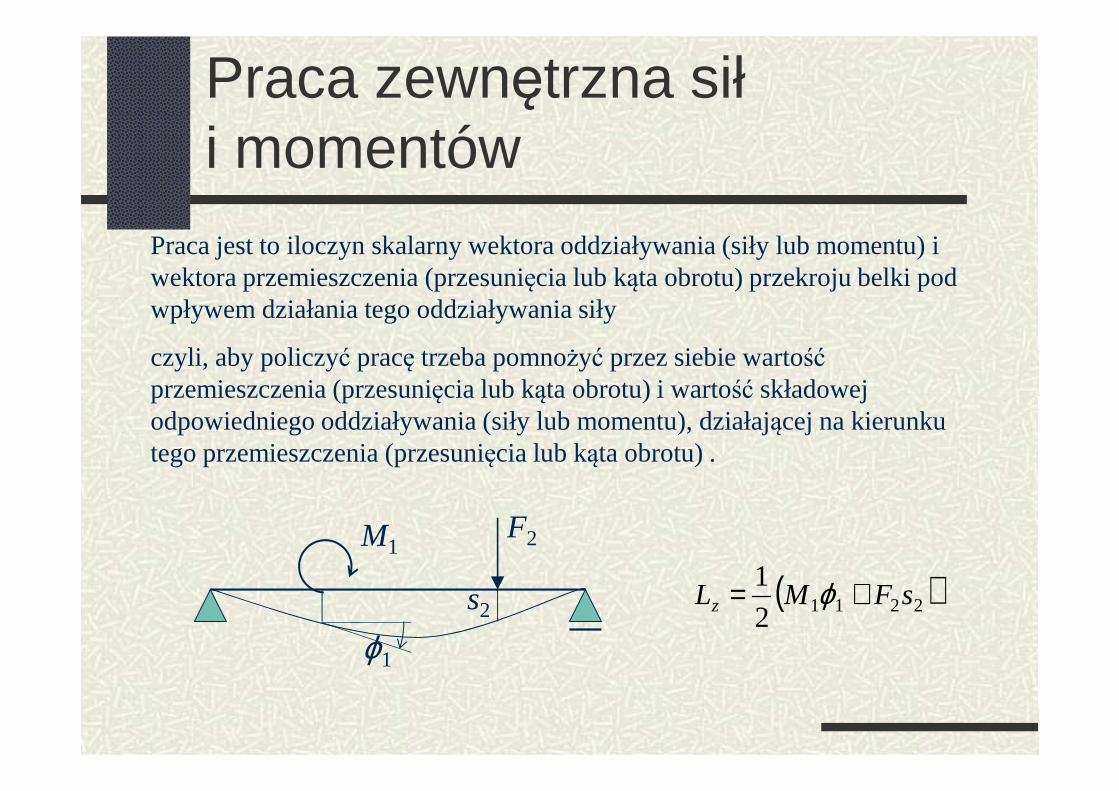
Praca jest to iloczyn skalarny wektora oddziaływania (siły lub momentu) i wektora przemieszczenia (przesunięcia lub kąta obrotu) przekroju belki pod wpływem działania tego oddziaływania siły
czyli, aby policzyć pracę trzeba pomnożyć przez siebie wartość przemieszczenia (przesunięcia lub kąta obrotu) i wartość składowej
( )22112
1sFMLz += ϕ
M1F2
ϕ1
s2
przemieszczenia (przesunięcia lub kąta obrotu) i wartość składowej odpowiedniego oddziaływania (siły lub momentu), działającej na kierunku tego przemieszczenia (przesunięcia lub kąta obrotu) .
Praca zewnętrzna obciążeń
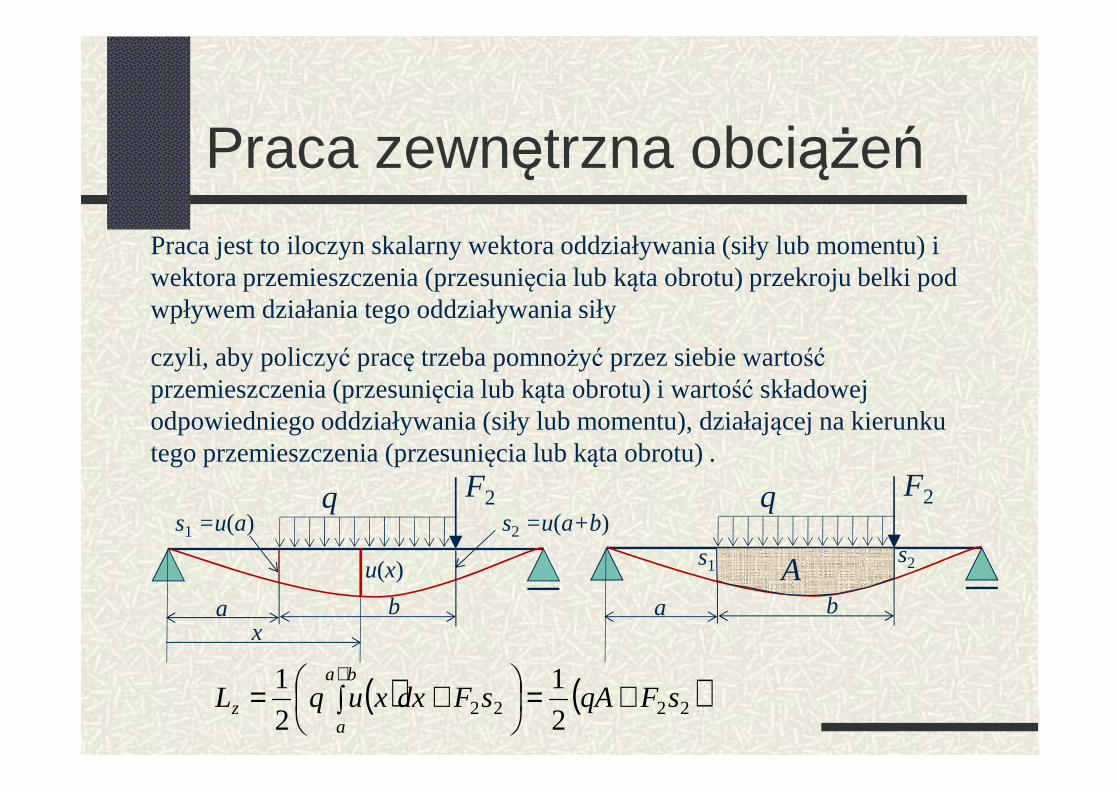
Praca jest to iloczyn skalarny wektora oddziaływania (siły lub momentu) i wektora przemieszczenia (przesunięcia lub kąta obrotu) przekroju belki pod wpływem działania tego oddziaływania siły
czyli, aby policzyć pracę trzeba pomnożyć przez siebie wartość przemieszczenia (przesunięcia lub kąta obrotu) i wartość składowej przemieszczenia (przesunięcia lub kąta obrotu) i wartość składowej odpowiedniego oddziaływania (siły lub momentu), działającej na kierunku tego przemieszczenia (przesunięcia lub kąta obrotu) .
( ) ( )2222 2
1
2
1sFqAsFdxxuqL
ba
az +=
+∫=+
F2s1 =u(a)
q
a b
u(x)
x
s2 =u(a+b)
F2
s1
q
a b
s2A
Praca wewnętrzna
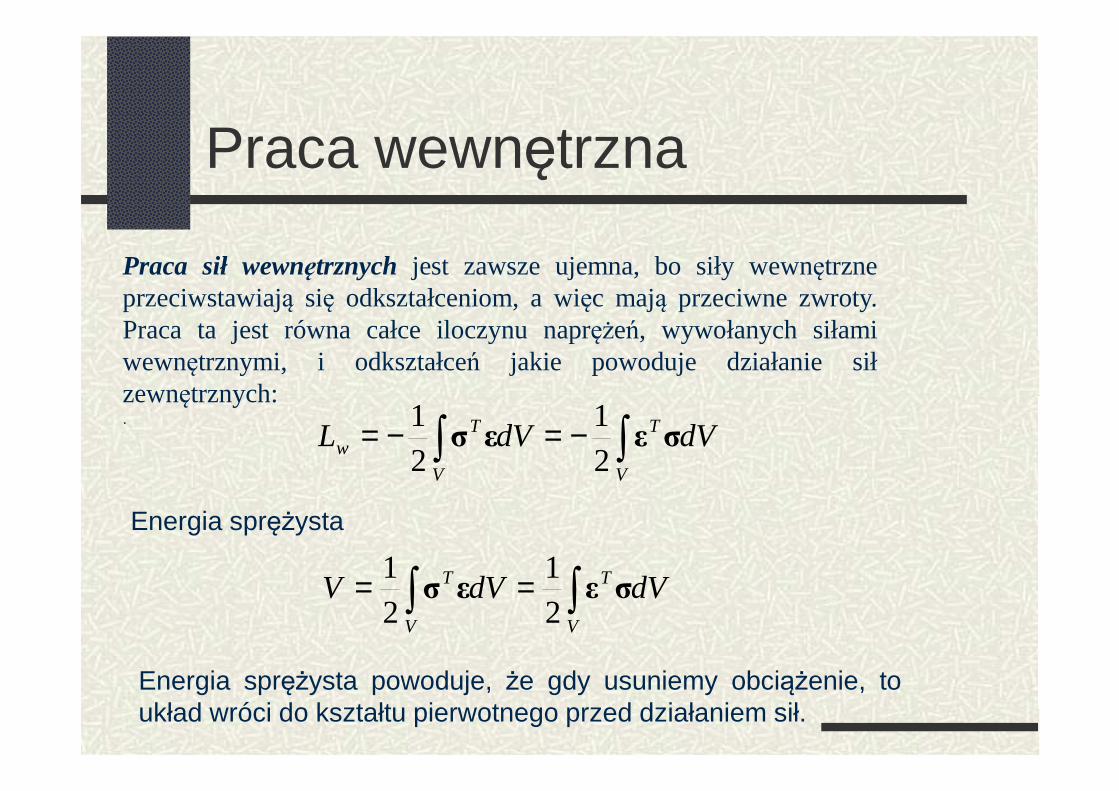
Praca sił wewnętrznych jest zawsze ujemna, bo siły wewnętrzneprzeciwstawiają się odkształceniom, a więc mają przeciwne zwroty.Praca ta jest równa całce iloczynu naprężeń, wywołanych siłamiwewnętrznymi, i odkształceń jakie powoduje działanie siłzewnętrznych:zewnętrznych:.
dVdVLV
T
V
Tw ∫∫ −=−= σεεσ
2
1
2
1
dVdVVV
T
V
T
∫∫ == σεεσ2
1
2
1
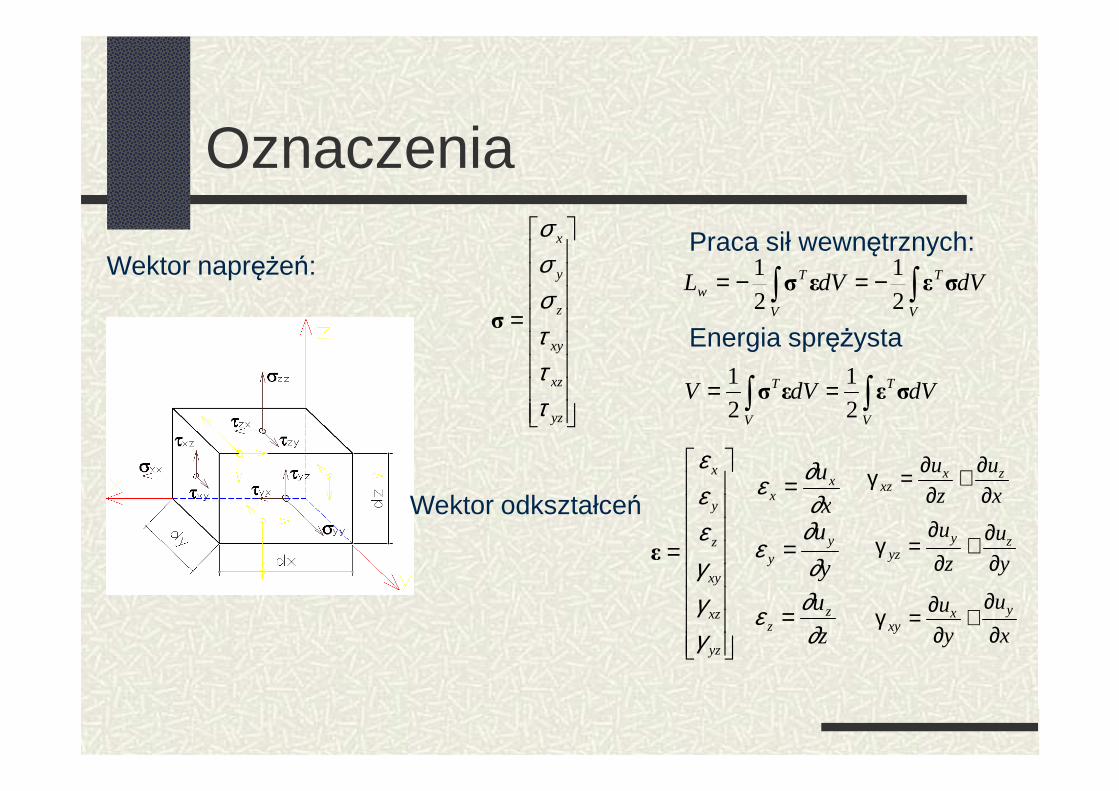
Energia sprężysta
Energia sprężysta powoduje, że gdy usuniemy obciążenie, toukład wróci do kształtu pierwotnego przed działaniem sił.
Oznaczenia
dVdVLV
T
V
Tw ∫∫ −=−= σεεσ
2
1
2
1
dVdVV TT
∫∫ == σεεσ11
Energia sprężysta
=
xz
xy
z
y
x
τττσσσ
σ
Praca sił wewnętrznych:Wektor naprężeń:
dVdVVVV∫∫ == σεεσ
22
yzτ
=
yz
xz
xy
z
y
x
γγγεεε
ε
x
uxx ∂
∂ε =
y
u yy ∂
∂ε =
z
uzz ∂
∂ε = γ ∂∂
∂∂xy
x yu
y
u
x= +
γ ∂∂
∂∂xz
x zu
z
u
x= +
γ∂∂
∂∂yz
y zu
z
u
y= +
Wektor odkształceń
Równania konstytutywne
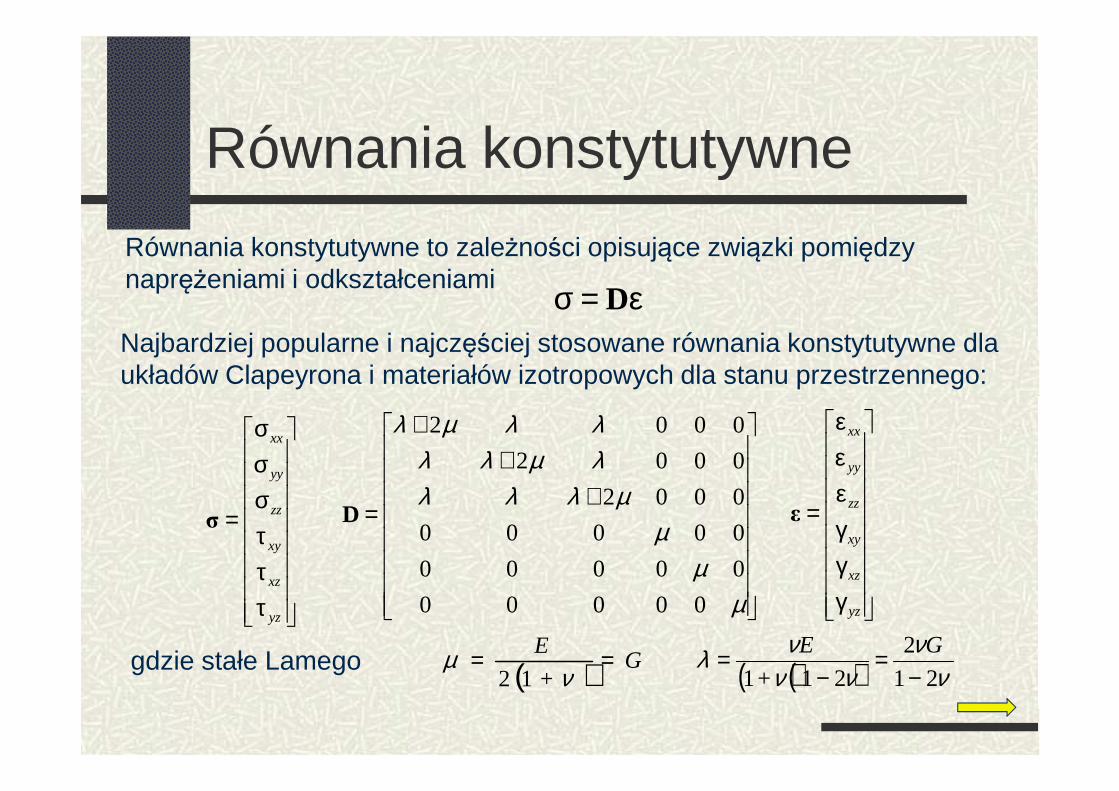
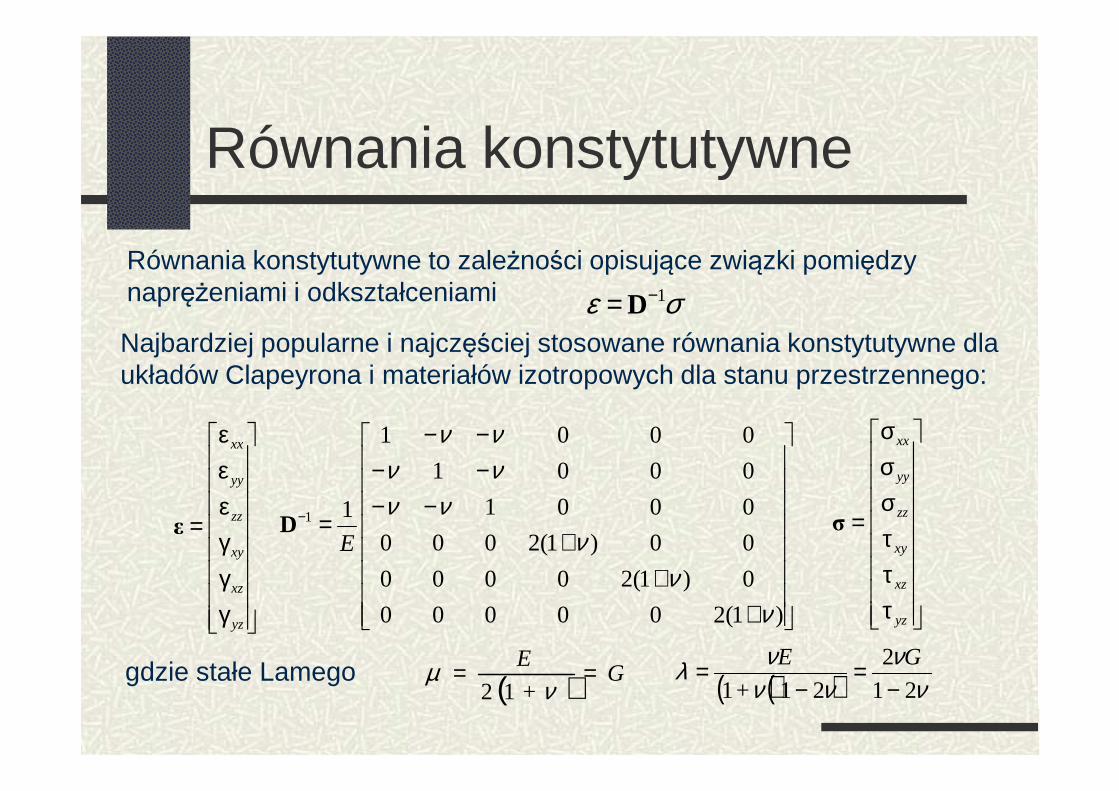
Równania konstytutywne to zależności opisujące związki pomiędzy naprężeniami i odkształceniami
ε=σ DNajbardziej popularne i najczęściej stosowane równania konstytutywne dla układów Clapeyrona i materiałów izotropowych dla stanu przestrzennego:
τττσσσ
=
yz
xz
xy
zz
yy
xx
σ
γγγεεε
=
yz
xz
xy
zz
yy
xx
ε
++
+
=
µµ
µµλλλ
λµλλλλµλ
00000
00000
00000
0002
0002
0002
D
( )( ) νν
νννλ
21
2
21+1 −=
−= GE
( ) GE ==
νµ
+12gdzie stałe Lamego
Równania konstytutywne
Równania konstytutywne to zależności opisujące związki pomiędzy naprężeniami i odkształceniami σε 1−= DNajbardziej popularne i najczęściej stosowane równania konstytutywne dla układów Clapeyrona i materiałów izotropowych dla stanu przestrzennego:
τττσσσ
=
yz
xz
xy
zz
yy
xx
σ
γγγεεε
=
yz
xz
xy
zz
yy
xx
ε
( )( ) νν
νννλ
21
2
21+1 −=
−= GE
( ) GE ==
νµ
+12gdzie stałe Lamego
++
+−−
−−−−
=−
)1(200000
0)1(20000
00)1(2000
0001
0001
0001
11
νν
ννν
νννν
ED
Równania konstytutywne
( ) GE ==
νµ
+12
gdzie stałe Lamego
++
+
=µ
µλλλλµλλλλµλ
00000
0002
0002
0002
D
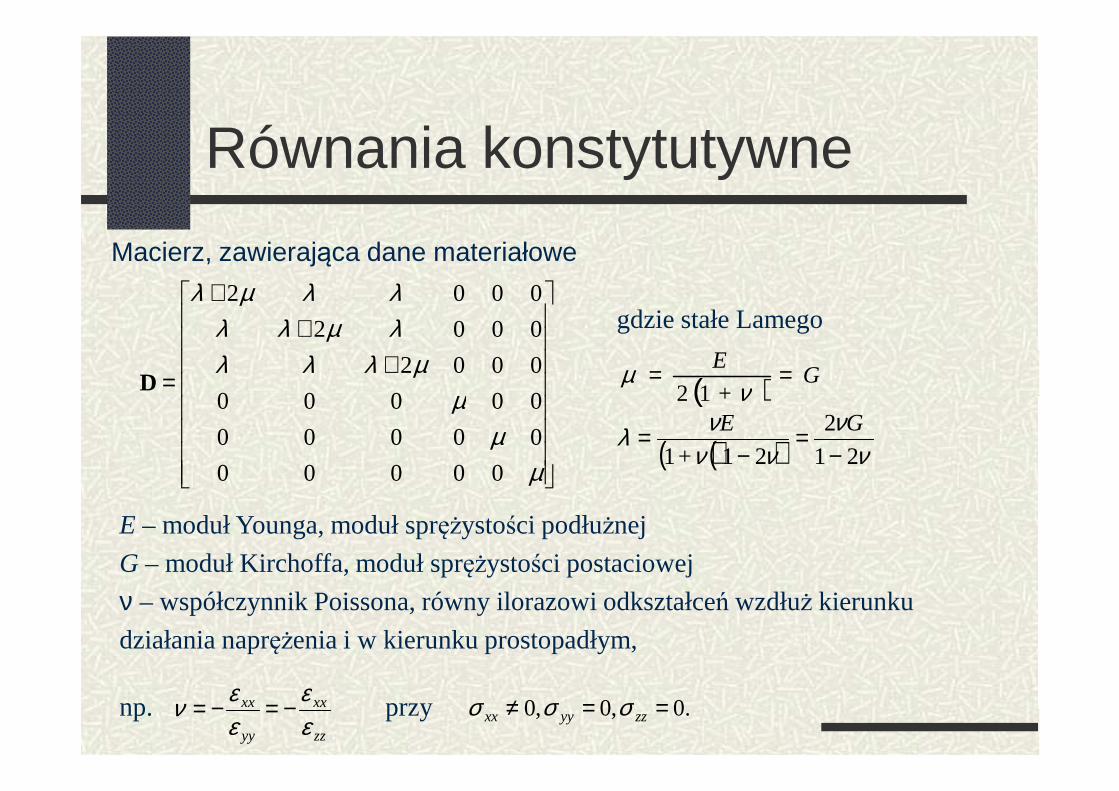
Macierz, zawierająca dane materiałowe
( )( ) νν
νννλ
21
2
21+1 −=
−= GE
( )ν+12
µµ
µ
00000
00000
00000
E – moduł Younga, moduł sprężystości podłużnej
G – moduł Kirchoffa, moduł sprężystości postaciowej
ν – współczynnik Poissona, równy ilorazowi odkształceń wzdłuż kierunku
działania naprężenia i w kierunku prostopadłym,
np. przy zz
xx
yy
xx
εε
εεν −=−= .0,0,0 ==≠ zzyyxx σσσ
Równania konstytutywne -geneza
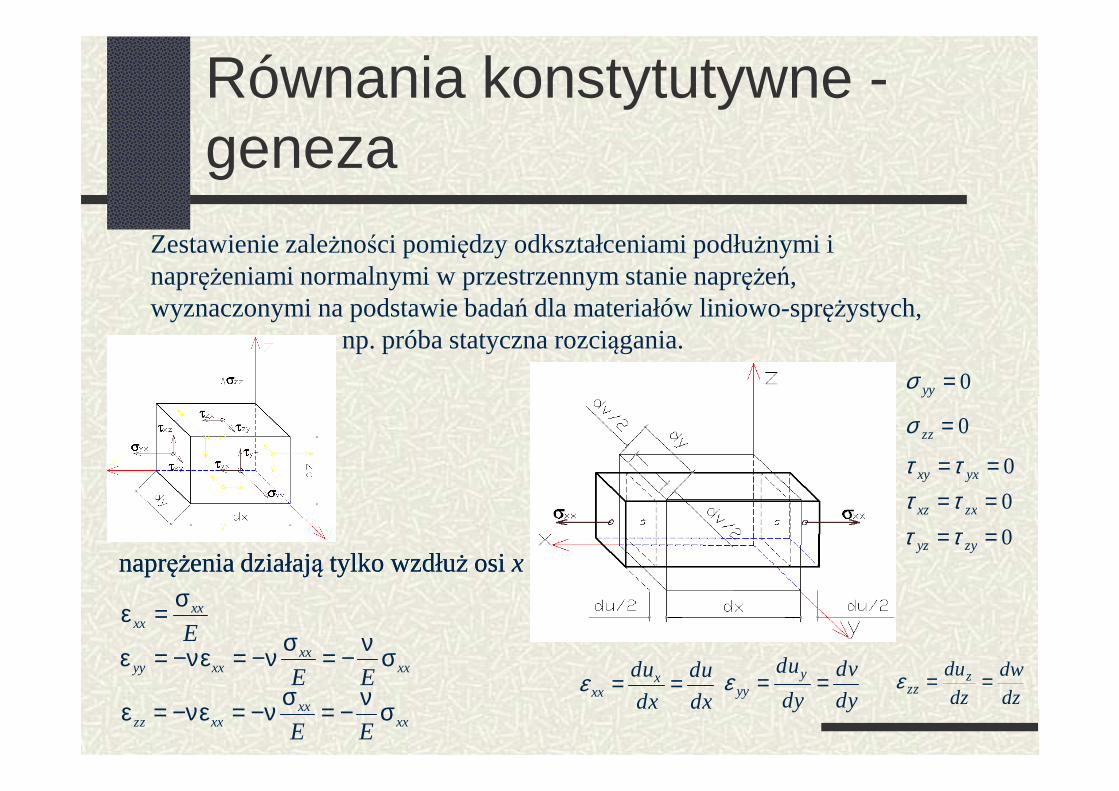
Zestawienie zależności pomiędzy odkształceniami podłużnymi i naprężeniami normalnymi w przestrzennym stanie naprężeń, wyznaczonymi na podstawie badań dla materiałów liniowo-sprężystych,
np. próba statyczna rozciągania.
0=yyσ
Exx
xx
σ=ε
xxxx
xxyy EEσν−=σν−=νε−=ε
xxxx
xxzz EEσν−=σν−=νε−=ε
naprężenia działają tylko wzdłuż osi naprężenia działają tylko wzdłuż osi xx
dx
du
dx
duxxx ==ε
dy
dv
dy
duyyy ==ε
dz
dw
dz
duzzz ==ε
yy
0=zzσ
0== yxxy ττ0== zxxz ττ0== zyyz ττ
Równania konstytutywne -geneza
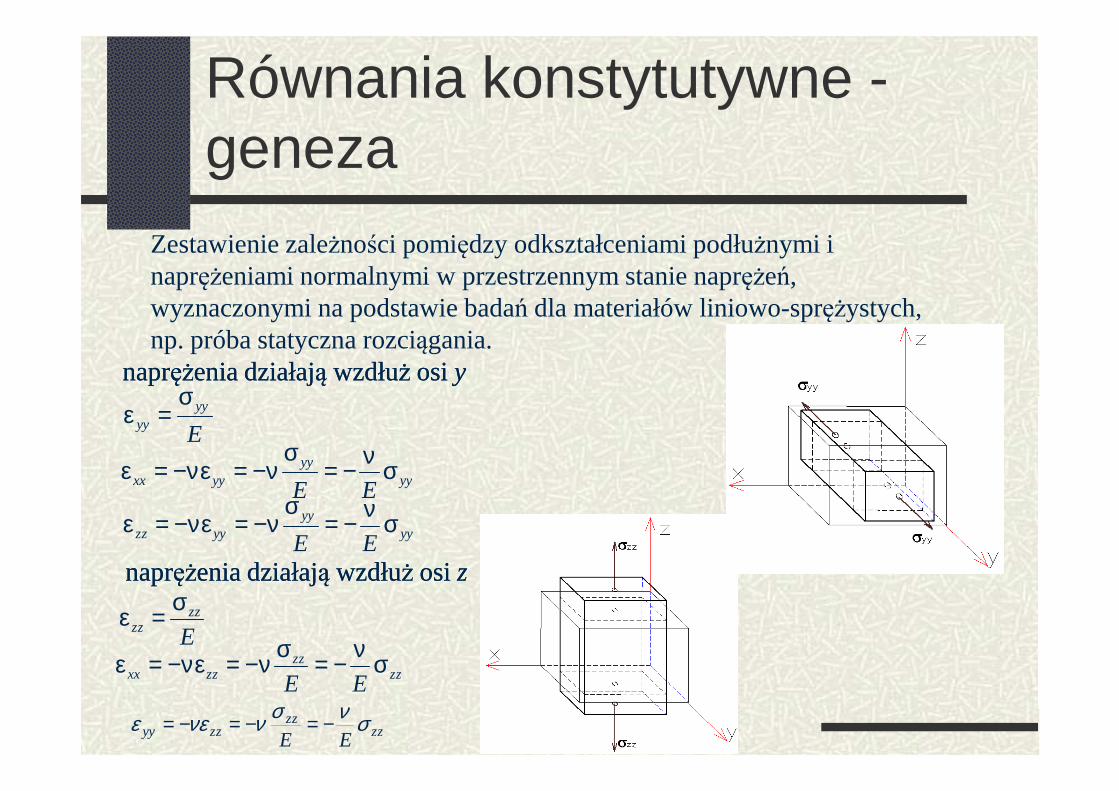
Zestawienie zależności pomiędzy odkształceniami podłużnymi i naprężeniami normalnymi w przestrzennym stanie naprężeń, wyznaczonymi na podstawie badań dla materiałów liniowo-sprężystych, np. próba statyczna rozciągania.
σnaprężenia działają wzdłuż osi naprężenia działają wzdłuż osi yy
Eyy
yy
σ=ε
Ezz
zz
σ=ε
yyyy
yyxx EEσν−=
σν−=νε−=ε
yyyy
yyzz EEσν−=
σν−=νε−=ε
naprężenia działają wzdłuż osi naprężenia działają wzdłuż osi zz
zzzz
zzxx EEσν−=σν−=νε−=ε
zzzz
zzyy EEσνσννεε −=−=−=
Równania konstytutywne -geneza
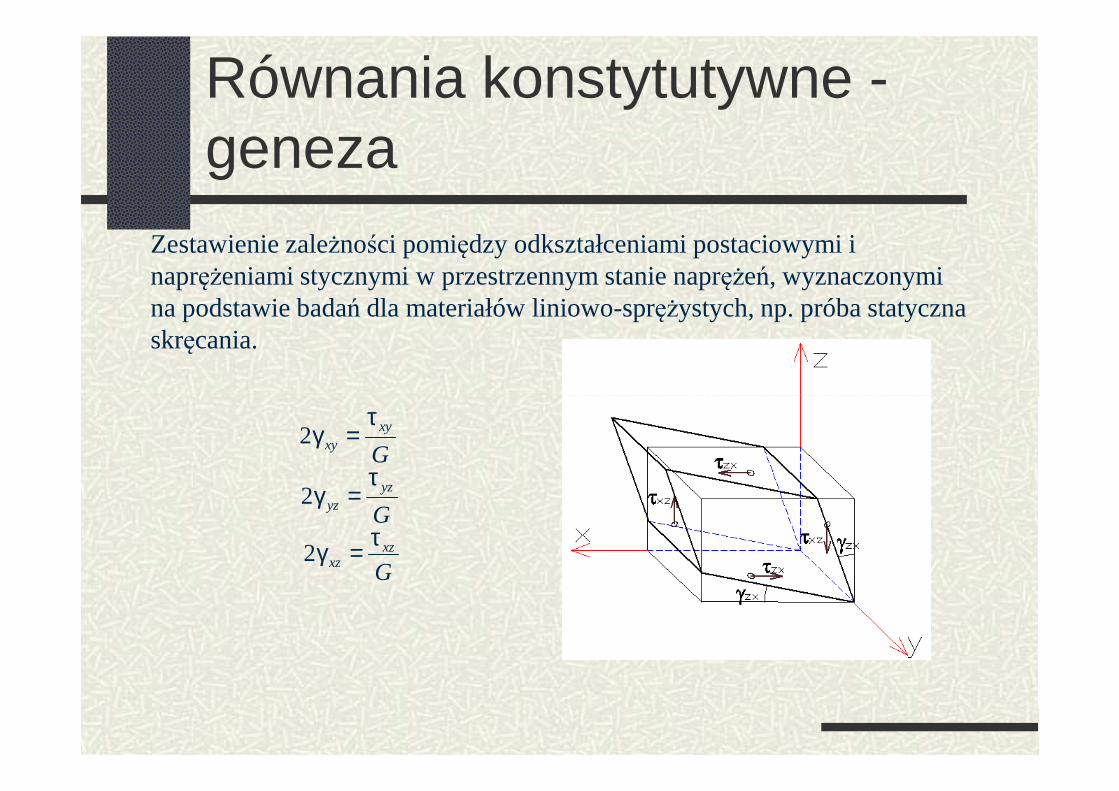
Zestawienie zależności pomiędzy odkształceniami postaciowymi i naprężeniami stycznymi w przestrzennym stanie naprężeń, wyznaczonymi na podstawie badań dla materiałów liniowo-sprężystych, np. próba statyczna skręcania.
Gxy
xy
τ=γ2
Gyz
yz
τ=γ2
Gxz
xz
τ=γ2
Układy Clapeyrona
Układ sprężysty musi spełniać następujące warunki:– materiał, z którego wykonany jest układ, zachowuje się zgodnie zprawem Hooke’a czyli jest to materiał liniowo-sprężysty,
– w układzie nie ma takich warunków brzegowych, których istnienie– w układzie nie ma takich warunków brzegowych, których istnieniezależy od odkształcenia konstrukcji,– temperatura układu jest stała,– nie ma naprężeń i odkształceń wstępnych.
Układy, które spełniaj ą wymienione warunki, nazywane s ą
układami Clapeyrona.
Twierdzenia Clapeyrona mówi,że dla układu sprężystego, znajdującego się wrównowadze, praca sił zewnętrznych Lz równa jest energii potencjalnej siłwewnętrznych (energii sprężystej):
Lz=V
Twierdzenie Clapeyrona
lub w innej wersji
Praca sił zewnętrznych jest miarą energii potencjalnej obciążenia zewnętrznegoprzekształcającej się w energię sprężystą:
Lz=Vz=V=-Lw
=⋅∑=
n
iii
12
1uP ∫∫ =
VV
dVdV σεεσTT
2
1
2
1
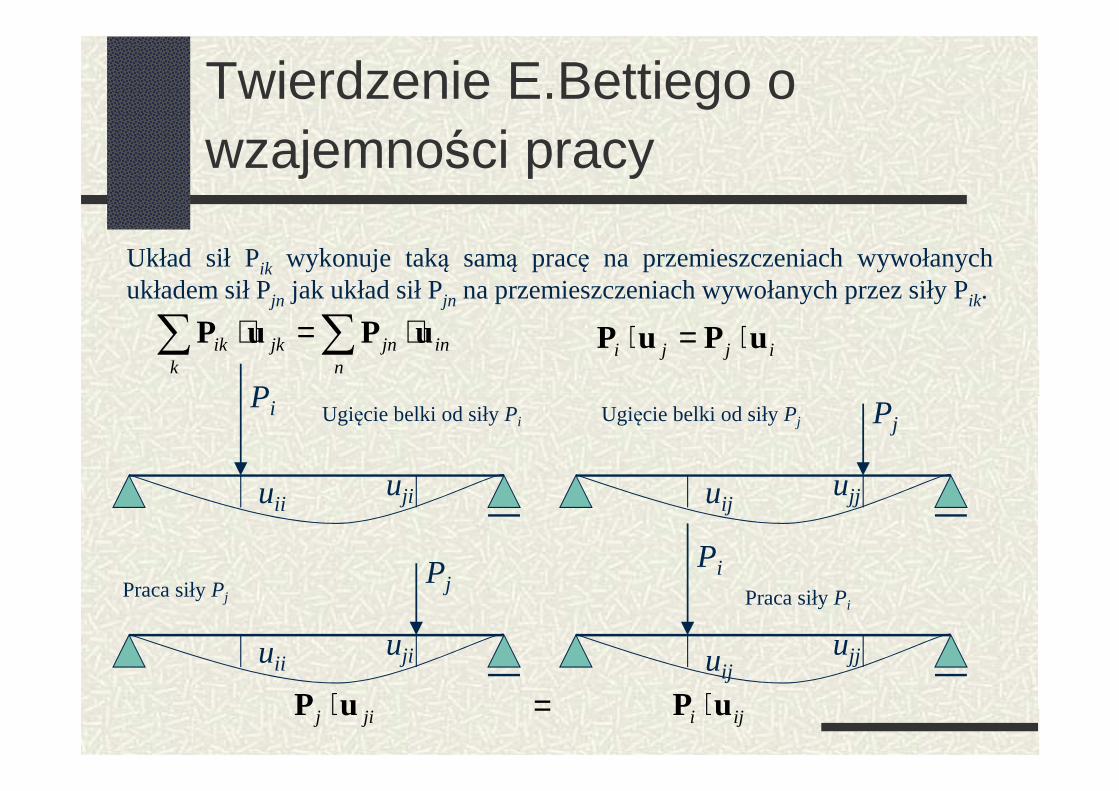
Układ sił Pik wykonuje taką samą pracę na przemieszczeniach wywołanychukładem sił Pjn jak układ sił Pjn na przemieszczeniach wywołanych przez siły Pik.
Twierdzenie E.Bettiego o wzajemności pracy
ijji uPuP ⋅=⋅
P P
∑∑ ⋅=⋅n
injnk
jkik uPuP
Pi
uiiuji
Pj
Pi
uiiuji
Pj
uijujj
uijujj
jij uP ⋅ iji uP ⋅=
Ugięcie belki od siły Pi Ugięcie belki od siły Pj
Praca siły Pj Praca siły Pi
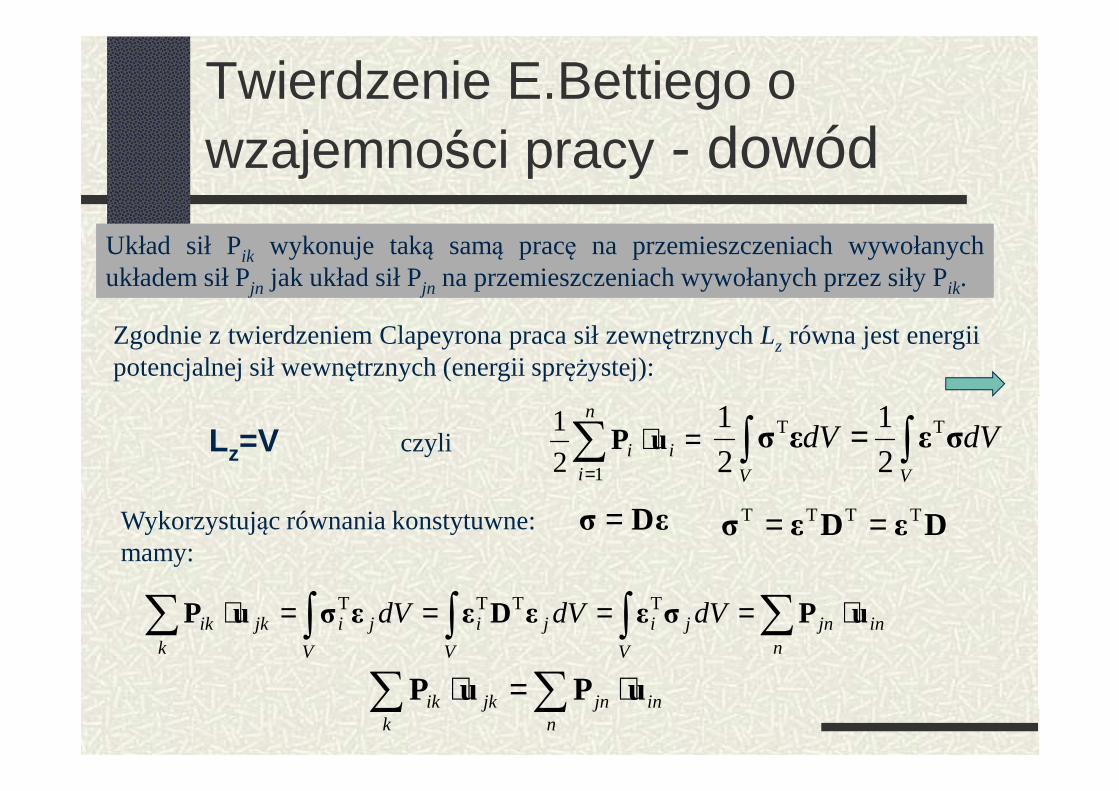
Układ sił Pik wykonuje taką samą pracę na przemieszczeniach wywołanychukładem sił Pjn jak układ sił Pjn na przemieszczeniach wywołanych przez siły Pik.
Twierdzenie E.Bettiego o wzajemności pracy - dowód
Zgodnie z twierdzeniem Clapeyrona praca sił zewnętrznychLz równa jest energiipotencjalnej sił wewnętrznych (energii sprężystej):
∑∫∫∫∑ ⋅====⋅n
injn
V
ji
V
ji
V
jik
jkik dVdVdV uPσεεDεεσuP TTTT
∑∑ ⋅=⋅n
injnk
jkik uPuP
Dεσ = DεDεσTTTT ==
Lz=V czyli =⋅∑=
n
iii
12
1uP ∫∫ =
VV
dVdV σεεσTT
2
1
2
1
Wykorzystując równania konstytuwne:mamy:
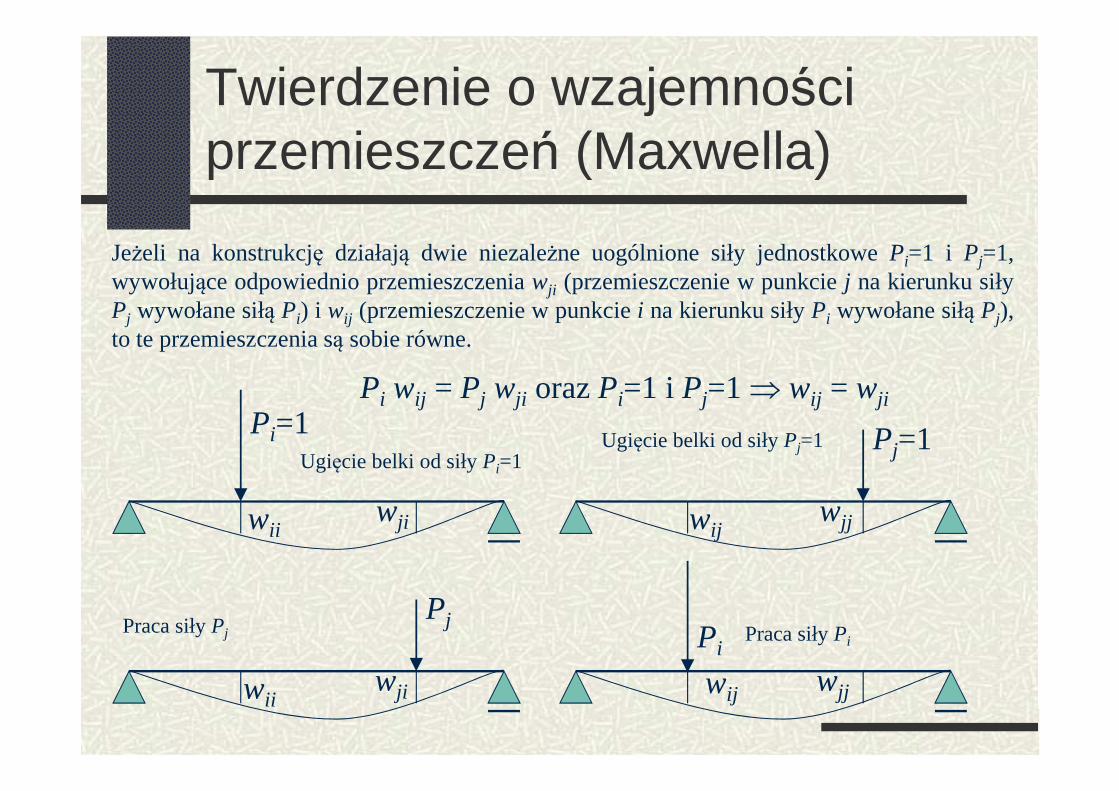
Jeżeli na konstrukcję działają dwie niezależne uogólnione siły jednostkowePi=1 i Pj=1,wywołujące odpowiednio przemieszczeniawji (przemieszczenie w punkciej na kierunku siłyPj wywołane siłą Pi) i wij (przemieszczenie w punkciei na kierunku siłyPi wywołane siłą Pj),to te przemieszczenia są sobie równe.
Twierdzenie o wzajemności przemieszczeń (Maxwella)
Pi wij = Pj wji oraz Pi=1 i Pj=1 ⇒ wij = wjiPi wij = Pj wji oraz Pi=1 i Pj=1 ⇒ wij = wji
Pi
wiiwji
Pj
Pi=1
wiiwji
Pj=1
wijwjj
wij wjj
Ugięcie belki od siły Pi=1Ugięcie belki od siły Pj=1
Praca siły Pj Praca siły Pi
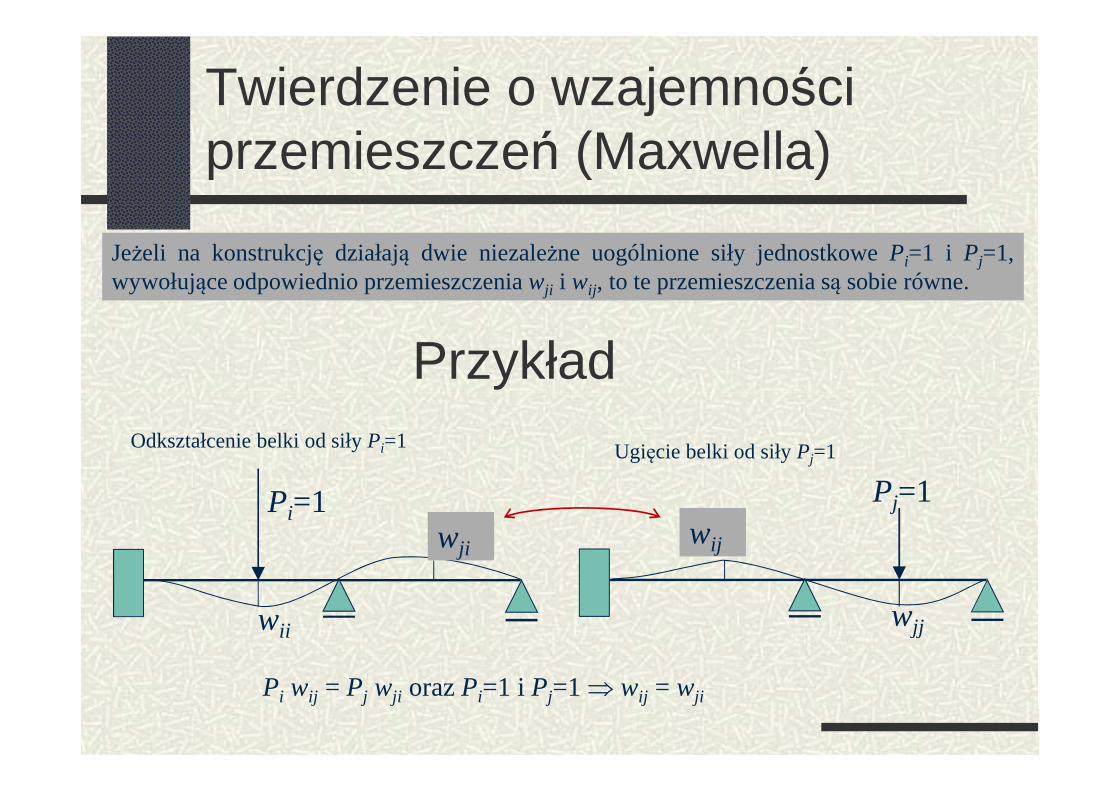
Jeżeli na konstrukcję działają dwie niezależne uogólnione siły jednostkowePi=1 i Pj=1,wywołujące odpowiednio przemieszczeniawji i wij, to te przemieszczenia są sobie równe.
Twierdzenie o wzajemności przemieszczeń (Maxwella)
Przykład
Pi wij = Pj wji oraz Pi=1 i Pj=1 ⇒ wij = wji
Pi=1
wii
wji
Pj=1wij
wjj
Odkształcenie belki od siły Pi=1 Ugięcie belki od siły Pj=1
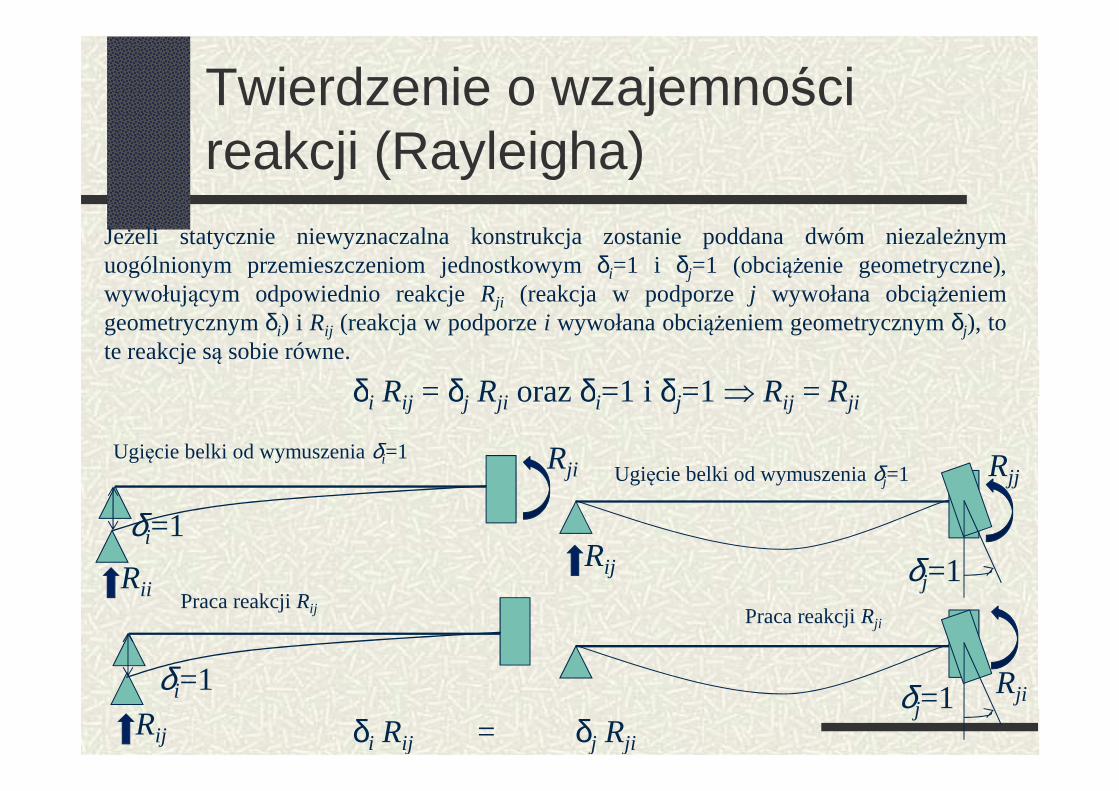
Jeżeli statycznie niewyznaczalna konstrukcja zostanie poddana dwóm niezależnymuogólnionym przemieszczeniom jednostkowymδi=1 i δj=1 (obciążenie geometryczne),wywołującym odpowiednio reakcjeRji (reakcja w podporzej wywołana obciążeniemgeometrycznymδi) i Rij (reakcja w podporzei wywołana obciążeniem geometrycznymδj), tote reakcje są sobie równe.
Twierdzenie o wzajemności reakcji (Rayleigha)
δi Rij = δj Rji oraz δi=1 i δj=1 ⇒ Rij = Rjiδi Rij = δj Rji oraz δi=1 i δj=1 ⇒ Rij = Rji
δi=1
RjiUgięcie belki od wymuszenia δi=1
Ugięcie belki od wymuszenia δj=1
Praca reakcji Rij Praca reakcji Rji
δj=1Rii
Rij
Rjj
Rij δi Rij = δj Rji
Rjiδj=1δi=1
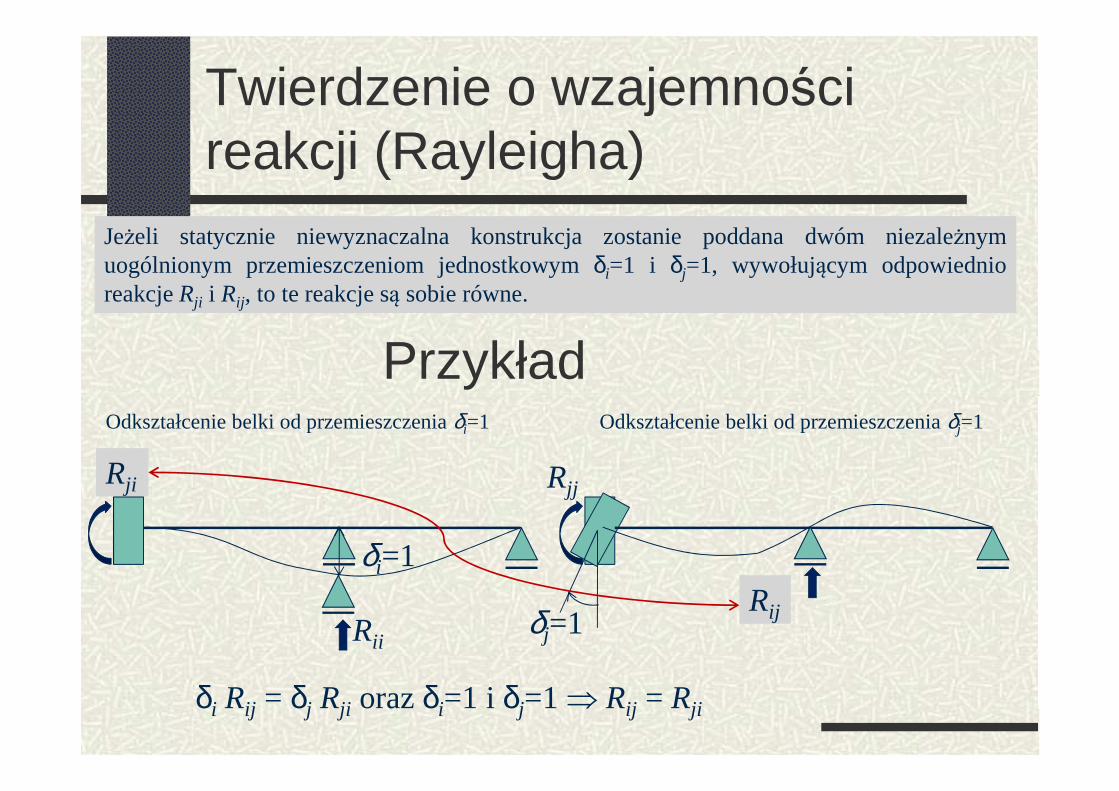
Jeżeli statycznie niewyznaczalna konstrukcja zostanie poddana dwóm niezależnymuogólnionym przemieszczeniom jednostkowymδi=1 i δj=1, wywołującym odpowiednioreakcjeRji i Rij, to te reakcje są sobie równe.
Twierdzenie o wzajemności reakcji (Rayleigha)
Przykład
δi Rij = δj Rji oraz δi=1 i δj=1 ⇒ Rij = Rji
δi=1
Rji
δj=1Rii
Rij
Rjj
Odkształcenie belki od przemieszczenia δi=1 Odkształcenie belki od przemieszczenia δj=1
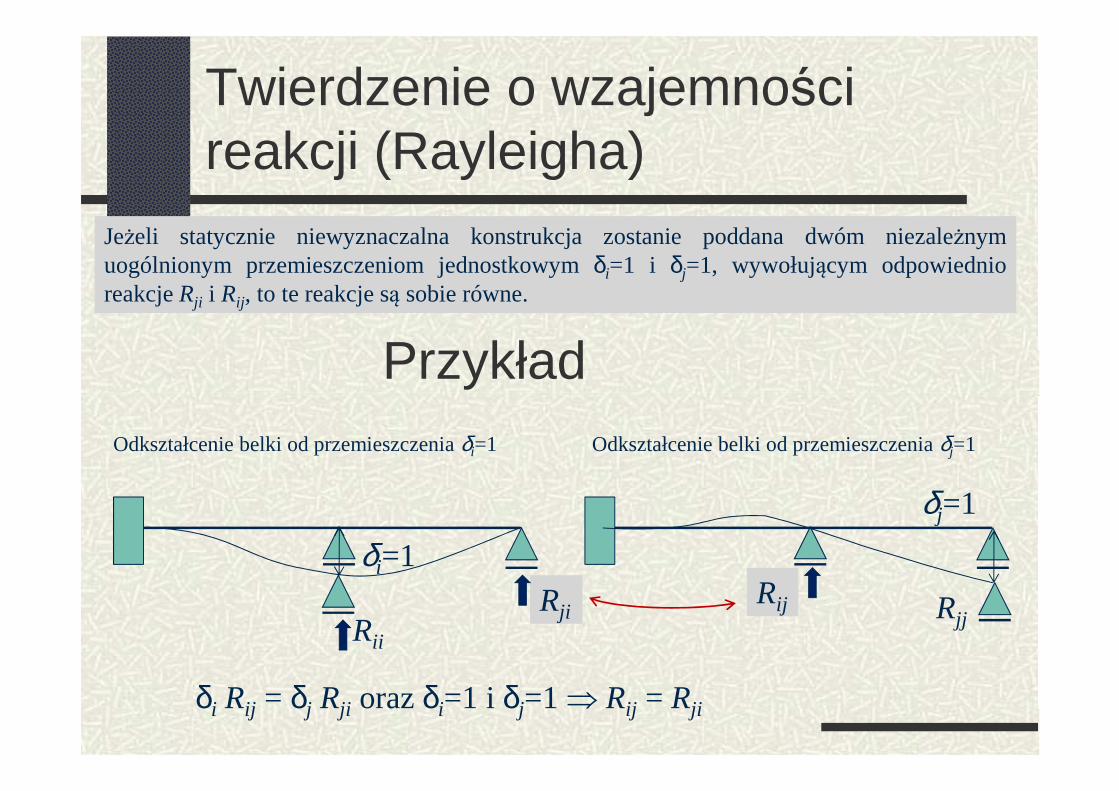
Jeżeli statycznie niewyznaczalna konstrukcja zostanie poddana dwóm niezależnymuogólnionym przemieszczeniom jednostkowymδi=1 i δj=1, wywołującym odpowiednioreakcjeRji i Rij, to te reakcje są sobie równe.
Twierdzenie o wzajemności reakcji (Rayleigha)
Przykład
δi Rij = δj Rji oraz δi=1 i δj=1 ⇒ Rij = Rji
δi=1
Rji
δj=1
Rii
Rij Rjj
Odkształcenie belki od przemieszczenia δi=1 Odkształcenie belki od przemieszczenia δj=1
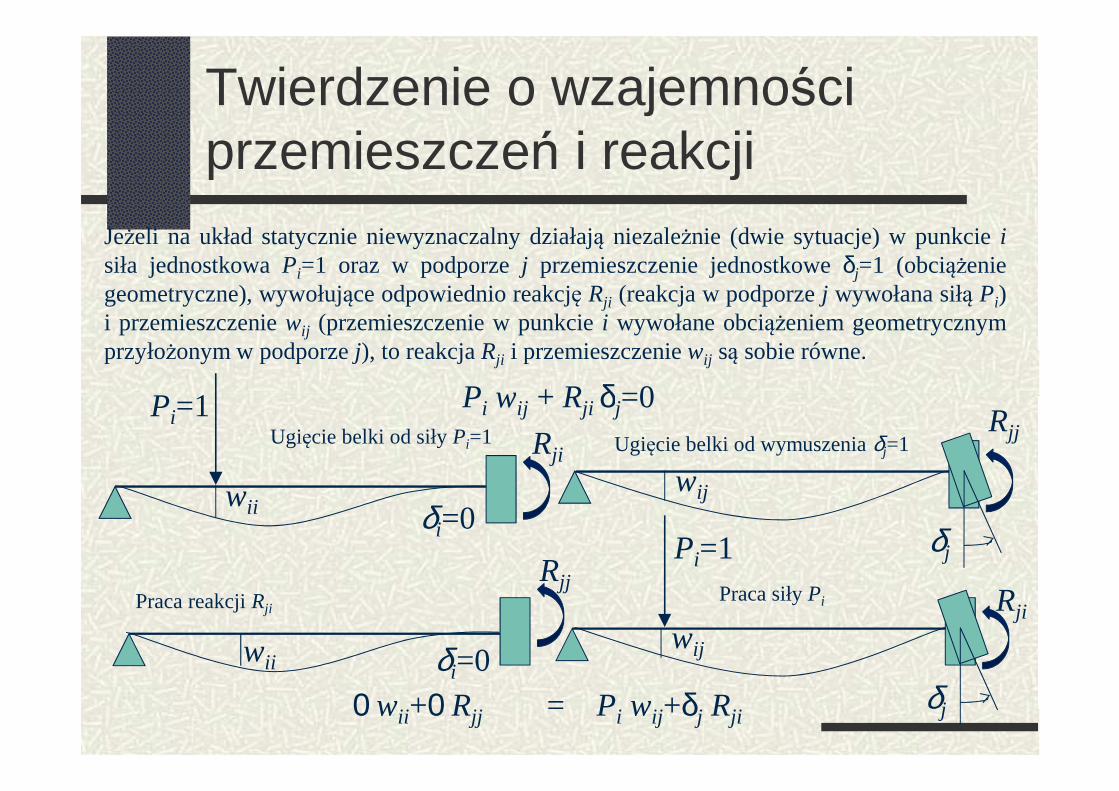
Jeżeli na układ statycznie niewyznaczalny działają niezależnie (dwie sytuacje) w punkcieisiła jednostkowaPi=1 oraz w podporzej przemieszczenie jednostkoweδj=1 (obciążeniegeometryczne), wywołujące odpowiednio reakcję Rji (reakcja w podporzej wywołana siłą Pi)i przemieszczeniewij (przemieszczenie w punkciei wywołane obciążeniem geometrycznymprzyłożonym w podporzej), to reakcjaRji i przemieszczeniewij są sobie równe.
Twierdzenie o wzajemności przemieszczeń i reakcji
P w + R δ =0P =1
wii
Rji Ugięcie belki od wymuszenia δj=1
Praca siły PiPraca reakcji Rji
δj
Rjj
0 wii+0 Rjj = Pi wij+δj Rji
Pi wij + Rji δj=0
wij
Pi=1Ugięcie belki od siły Pi=1
wii
δj
wij
δi=0
δi=0
Rjj
Pi=1
Rji

Jeżeli na układ statycznie niewyznaczalny działają niezależnie w punkciei siła jednostkowaPi=1 oraz w podporzej przemieszczenie jednostkoweδj=1, wywołujące odpowiednio reakcjęRji i przemieszczeniewij, to reakcjaRji i przemieszczeniewij są sobie równe.
Twierdzenie o wzajemności przemieszczeń i reakcji
Przykład
0 wii+0 Rjj = Pi wij+δj Rji
δj=1
Rjj
Rji
Odkształcenie belki od przemieszczenia δj=1
Pi=1
wii
wji=0
Odkształcenie belki od siły Pi=1
wij
Metoda kinematyczna wyznaczania linii wpływu
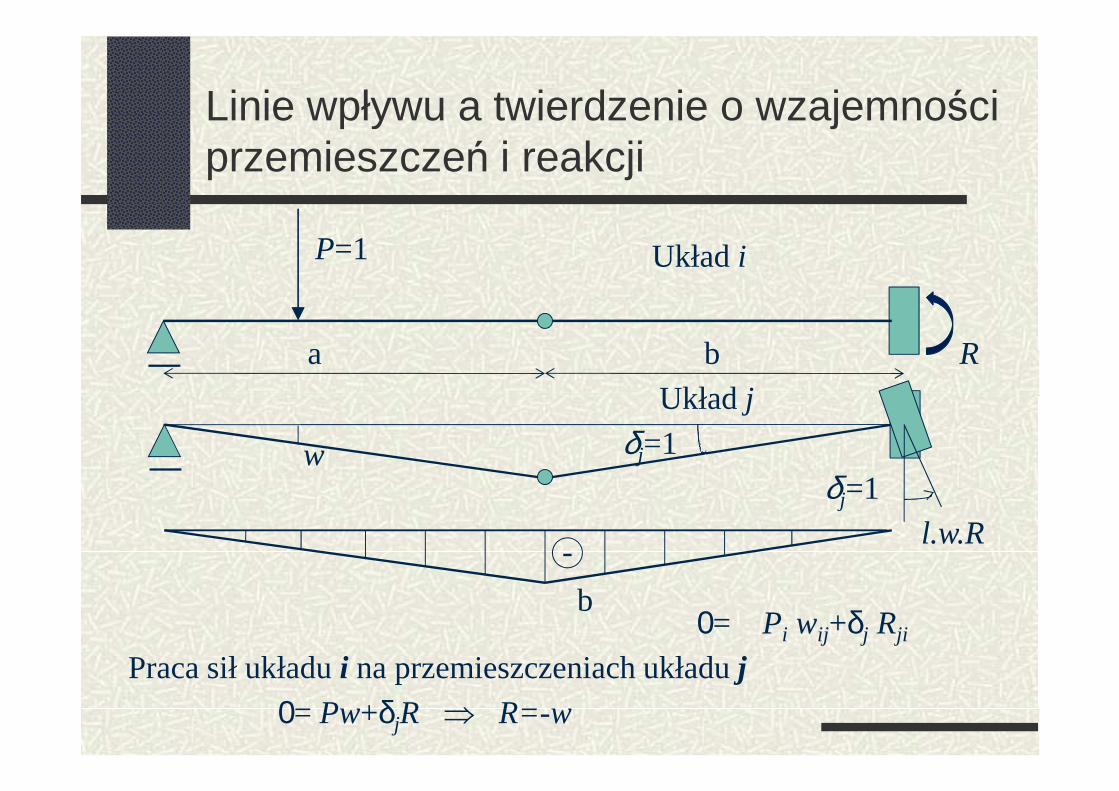
Linie wpływu a twierdzenie o wzajemności przemieszczeń i reakcji
P=1
Ra b
Układ i
Układ j
0= Pi wij+δj Rji
δj=1
0= Pw+δjR ⇒ R=-w
l.w.R
w
-
Układ j
Praca sił układu i na przemieszczeniach układu j
b
δj=1
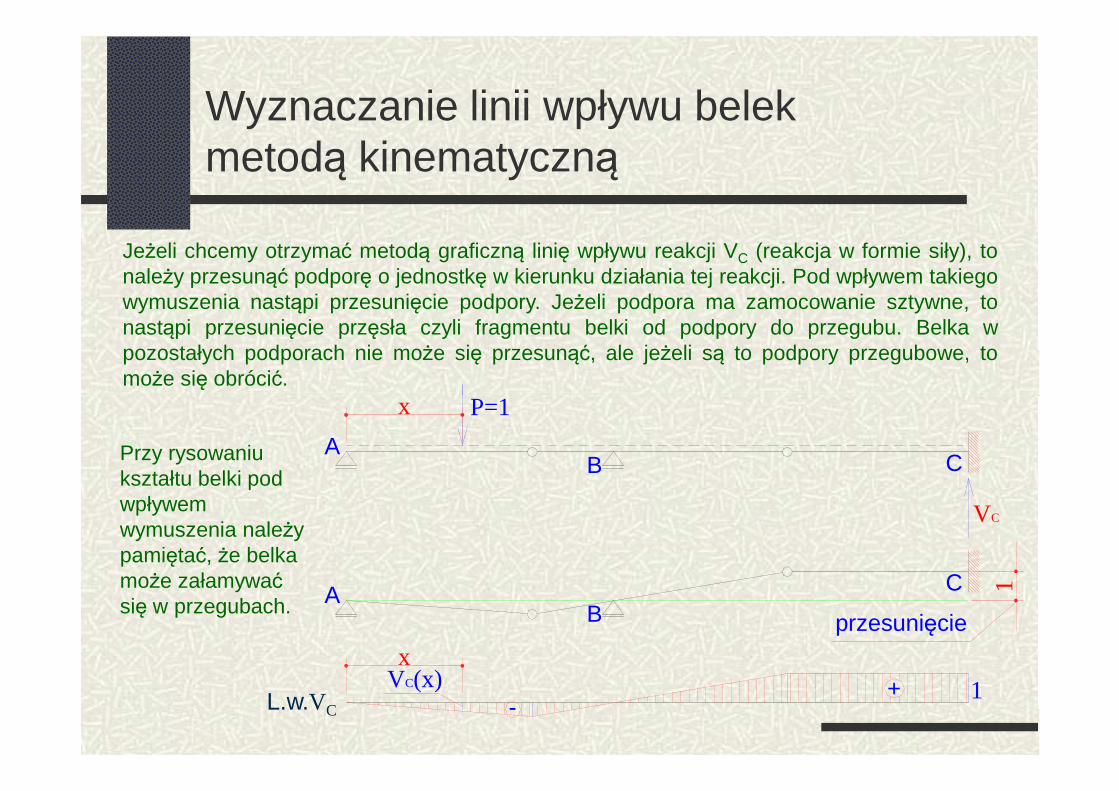
Wyznaczanie linii wpływu belek metodą kinematyczną
Jeżeli chcemy otrzymać metodą graficzną linię wpływu reakcji VC (reakcja w formie siły), tonależy przesunąć podporę o jednostkę w kierunku działania tej reakcji. Pod wpływem takiegowymuszenia nastąpi przesunięcie podpory. Jeżeli podpora ma zamocowanie sztywne, tonastąpi przesunięcie przęsła czyli fragmentu belki od podpory do przegubu. Belka wpozostałych podporach nie może się przesunąć, ale jeżeli są to podpory przegubowe, tomoże się obrócić.
P=1x
Przy rysowaniu kształtu belki pod wpływem wymuszenia należy pamiętać, że belka może załamywać się w przegubach.
L.w.VC
P=1x
AB C
x1VC(x)
AB
C
VC
1
przesunięcie
+-

Wyznaczanie linii wpływu belekmetodą kinematyczną
Jeżeli chcemy otrzymać metodą graficzną linię wpływu reakcji MC (reakcja w formie momentu), tonależy obrócić podporę o jednostkowy kąt w kierunku działania tej reakcji. Obrót o kąt jednostkowyoznacza (przy założeniu małych przemieszczeń), że obracamy o kąt, którego tangens jest równy 1.Pod wpływem takiego wymuszenia nastąpi obrót podpory, ale nie przesunięcie. Na rysunkupokazano wymuszony obrót w punkcie C. Belka załamuje się w przegubie, po to aby wrócić dopodpory B. To powoduje przesunięcie drugiego przegubu, w którym belka także musi się złamać poto, aby wrócić do podpory w punkcie A. Przemieszczenia zgodne ze zwrotem siły P bierzemy zeto, aby wrócić do podpory w punkcie A. Przemieszczenia zgodne ze zwrotem siły P bierzemy zeznakiem ujemnym.
L.w.MC
P=1x
AB C
x MC(x)
AB
Cobrót
MC
k+
k_
1
Wyznaczanie linii wpływu belekmetodą kinematyczną
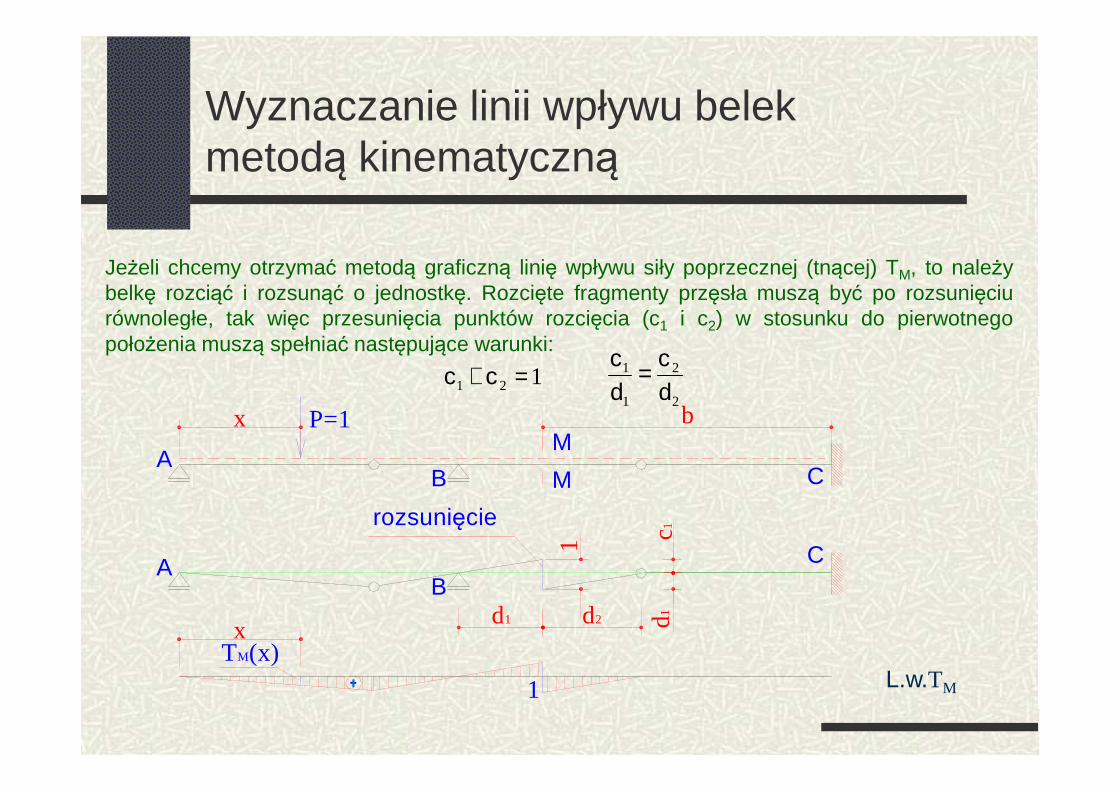
Jeżeli chcemy otrzymać metodą graficzną linię wpływu siły poprzecznej (tnącej) TM, to należybelkę rozciąć i rozsunąć o jednostkę. Rozcięte fragmenty przęsła muszą być po rozsunięciurównoległe, tak więc przesunięcia punktów rozcięcia (c1 i c2) w stosunku do pierwotnegopołożenia muszą spełniać następujące warunki:
121 =+ cc2
2
1
1
dc
dc =
L.w.TM
21 ddP=1x
AB C
x
1
TM(x)
AB
C1
rozsunięcie
-
M
M
b
d1 d2 d1c1
Wyznaczanie linii wpływu belek metodą kinematyczną
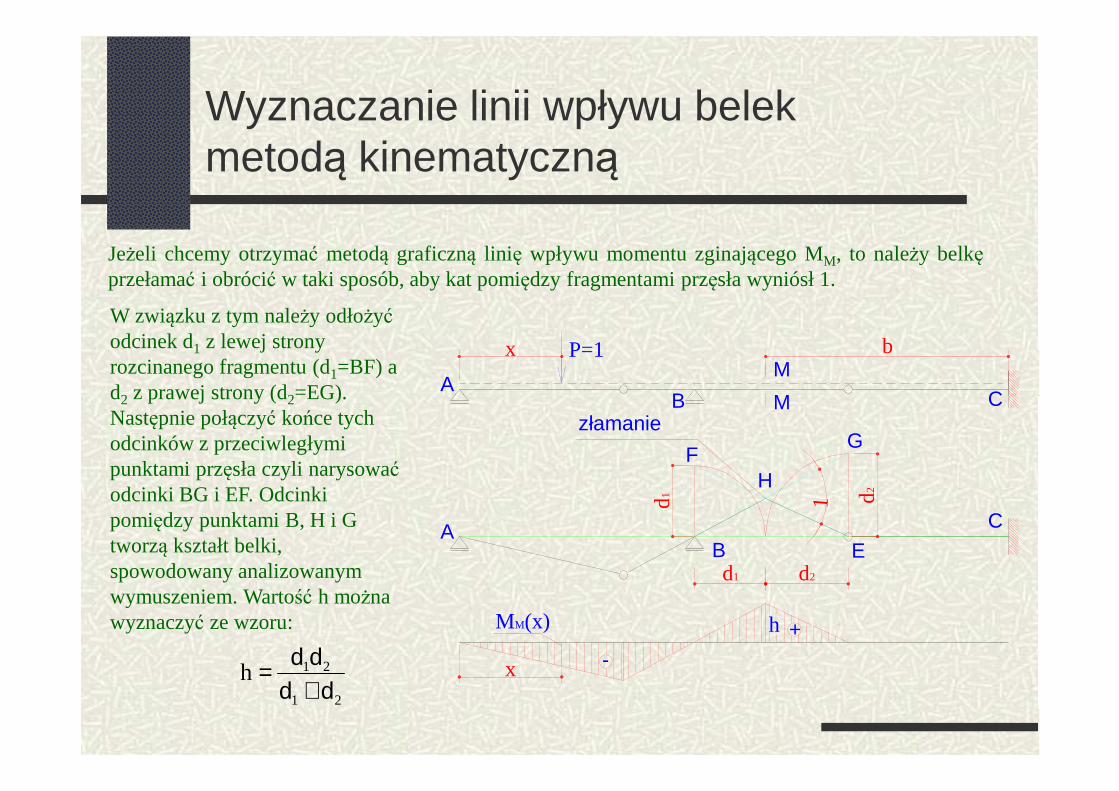
Jeżeli chcemy otrzymać metodą graficzną linię wpływu momentu zginającego MM, to należy belkęprzełamać i obrócić w taki sposób, aby kat pomiędzy fragmentami przęsła wyniósł 1.
W związku z tym należy odłożyć odcinek d1 z lewej strony rozcinanego fragmentu (d1=BF) a d2 z prawej strony (d2=EG).
P=1x
AB C
M
M
b
d2 z prawej strony (d2=EG). Następnie połączyć końce tych odcinków z przeciwległymi punktami przęsła czyli narysować odcinki BG i EF. Odcinki pomiędzy punktami B, H i G tworzą kształt belki, spowodowany analizowanym wymuszeniem. Wartość h można wyznaczyć ze wzoru:
21
21hdd
dd+
=
AB C
x
hMM(x)
AB
C
złamanie
-
M
1
d1 d2
d1 d2
+
F
E
G
H
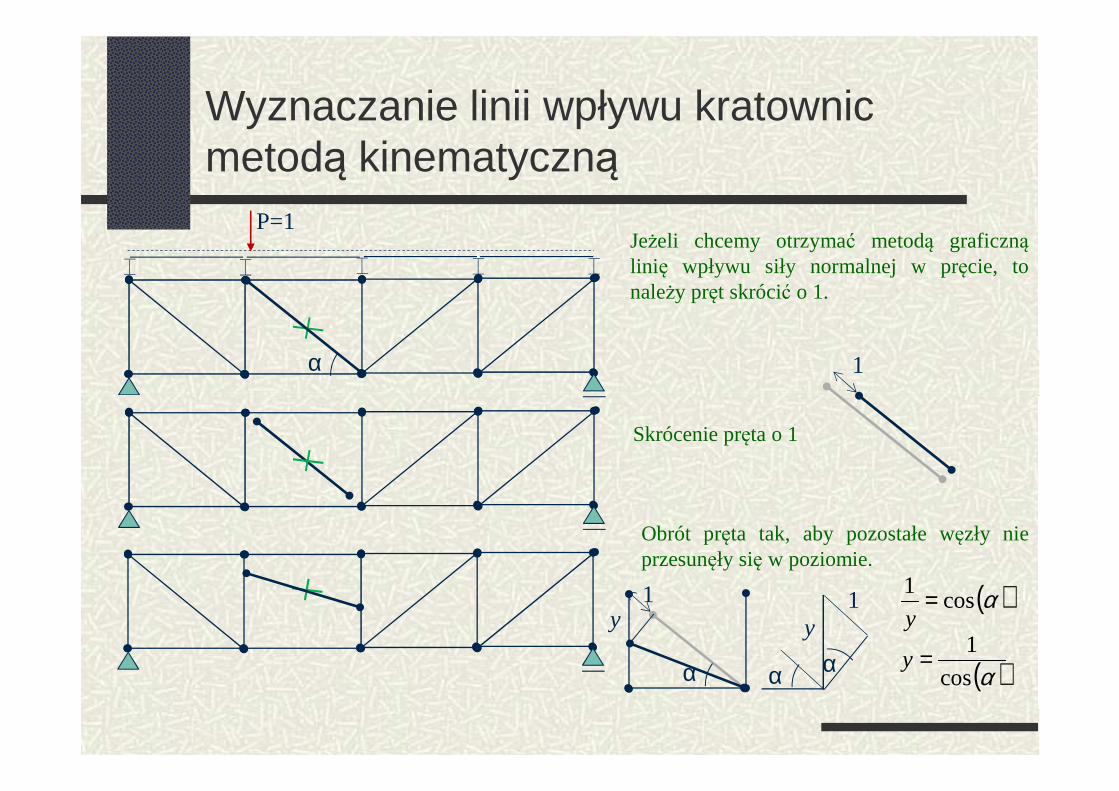
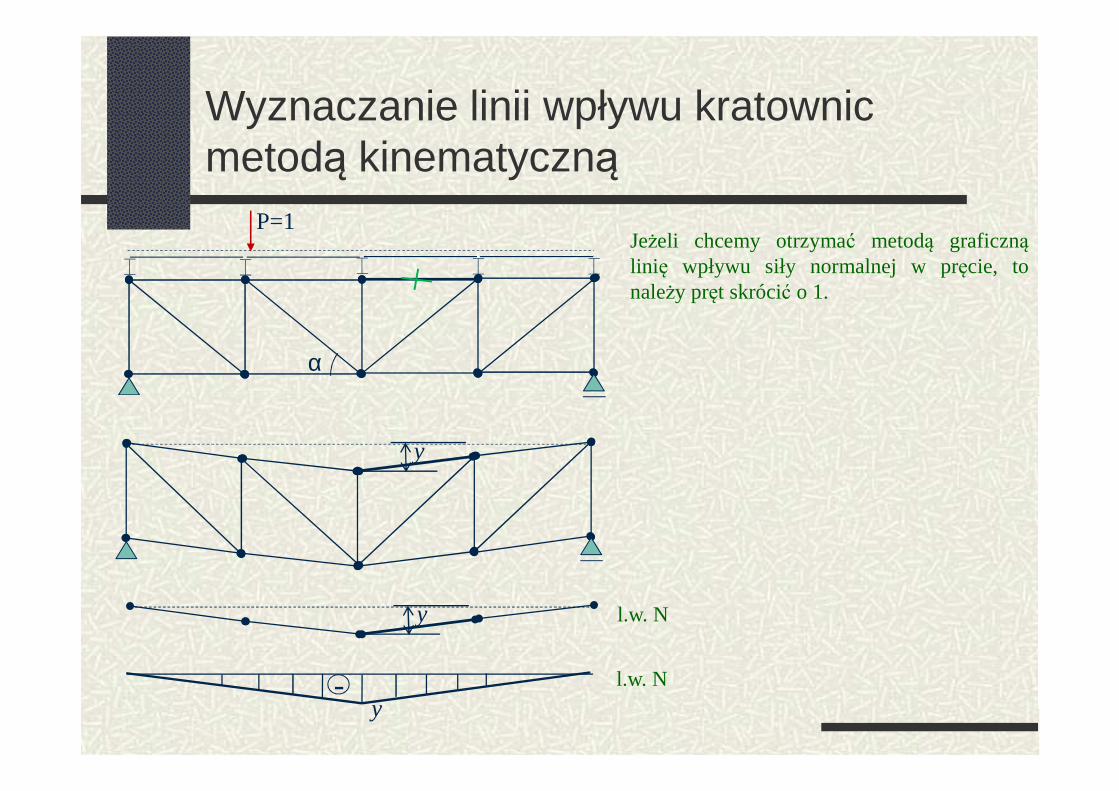
Wyznaczanie linii wpływu kratownic metodą kinematyczną
Jeżeli chcemy otrzymać metodą graficznąlinię wpływu siły normalnej w pręcie, tonależy pręt skrócić o 1.
P=1
1α
Skrócenie pręta o 1
Obrót pręta tak, aby pozostałe węzły nieprzesunęły się w poziomie.
1y
α
y1
α α
( )αcos1 =y
( )αcos
1=y
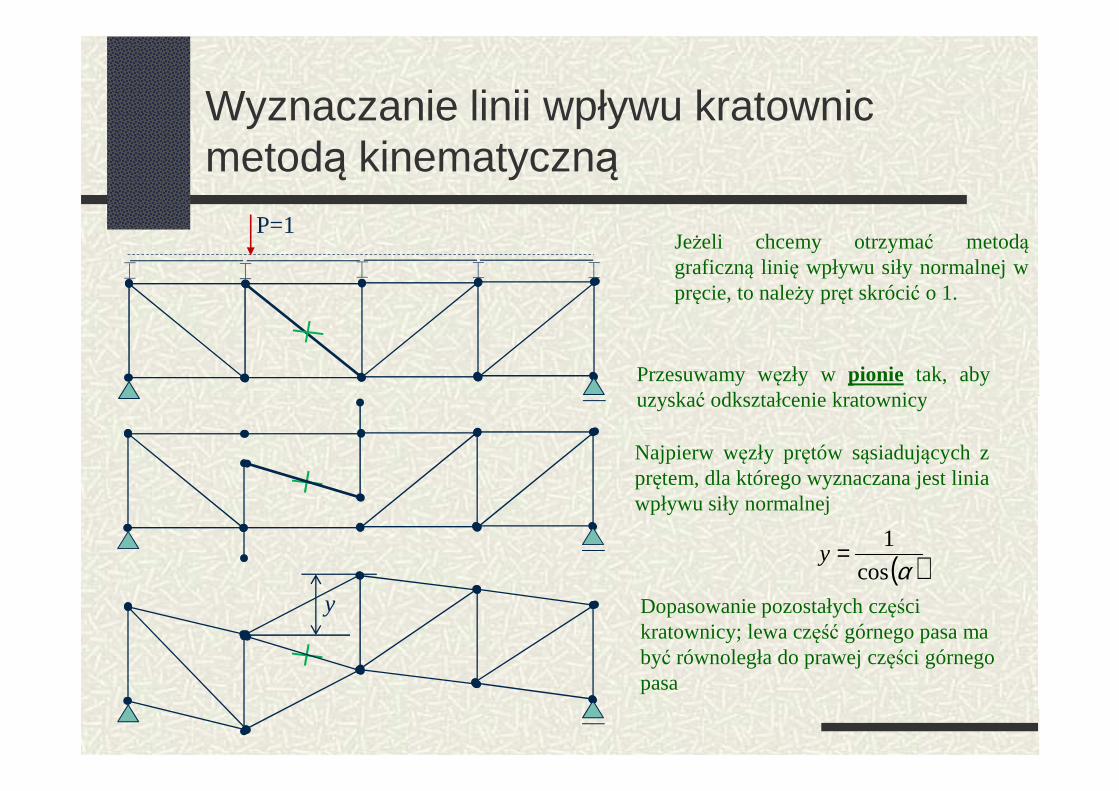
Wyznaczanie linii wpływu kratownic metodą kinematyczną
Jeżeli chcemy otrzymać metodągraficzną linię wpływu siły normalnej wpręcie, to należy pręt skrócić o 1.
P=1
Przesuwamy węzły w pionie tak, abyuzyskać odkształceniekratownicyuzyskać odkształceniekratownicy
Dopasowanie pozostałych części kratownicy; lewa część górnego pasa ma być równoległa do prawej części górnego pasa
Najpierw węzły prętów sąsiadujących zprętem, dla którego wyznaczana jest liniawpływu siły normalnej
y( )αcos
1=y

Wyznaczanie linii wpływu kratownic metodą kinematyczną
Jeżeli chcemy otrzymać metodągraficzną linię wpływu siły normalnej wpręcie, to należy pręt skrócić o 1.
P=1
l.w. N
Linię wpływu tworzą przesunięte węzły,leżące na drodze siły
( )αcos
1=y
y
y
y1
y2a1
a2
21 yyy +=
2
2
1
1
a
y
a
y =y1
y2-+
l.w. N
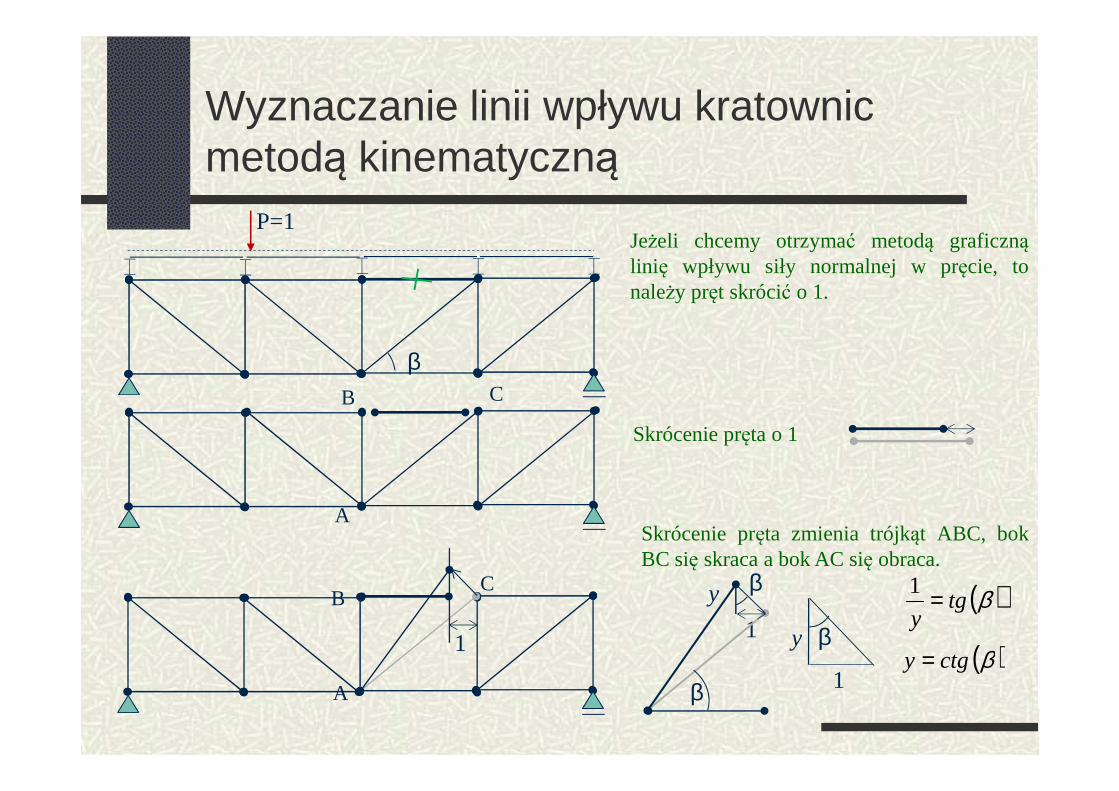
Wyznaczanie linii wpływu kratownic metodą kinematyczną
Jeżeli chcemy otrzymać metodą graficznąlinię wpływu siły normalnej w pręcie, tonależy pręt skrócić o 1.
P=1
βCB
Skrócenie pręta o 1
Skrócenie pręta zmienia trójkąt ABC, bokBC się skraca a bok AC się obraca.
y ( )βtgy
=1
( )βctgy =1
A
B
C
β 1
β
y β
B
A
1
C
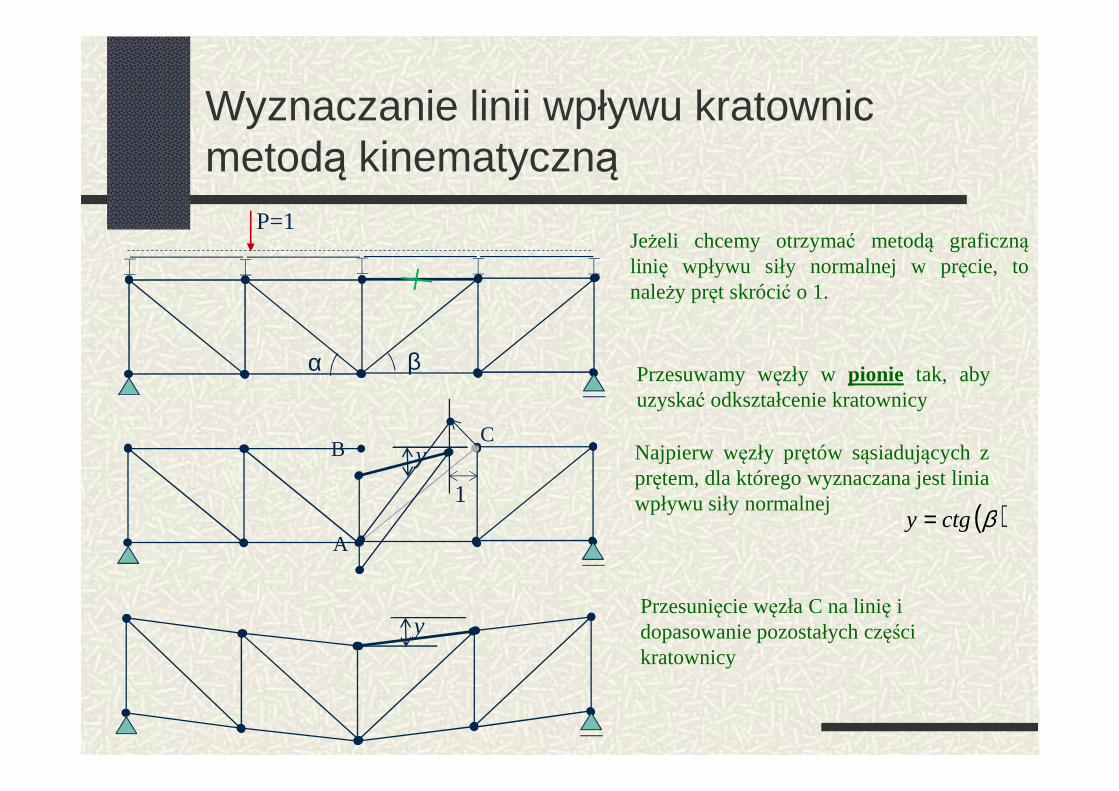
Wyznaczanie linii wpływu kratownic metodą kinematyczną
Jeżeli chcemy otrzymać metodą graficznąlinię wpływu siły normalnej w pręcie, tonależy pręt skrócić o 1.
P=1
α Przesuwamy węzły w pionie tak, abyuzyskać odkształceniekratownicy
βuzyskać odkształceniekratownicy
Najpierw węzły prętów sąsiadujących zprętem, dla którego wyznaczana jest liniawpływu siły normalnej
Przesunięcie węzła C na linię i dopasowanie pozostałych części kratownicy
A
B
1
Cy
( )βctgy =
y
Wyznaczanie linii wpływu kratownic metodą kinematyczną
Jeżeli chcemy otrzymać metodą graficznąlinię wpływu siły normalnej w pręcie, tonależy pręt skrócić o 1.
P=1
α
l.w. N
y
y
l.w. N
y-
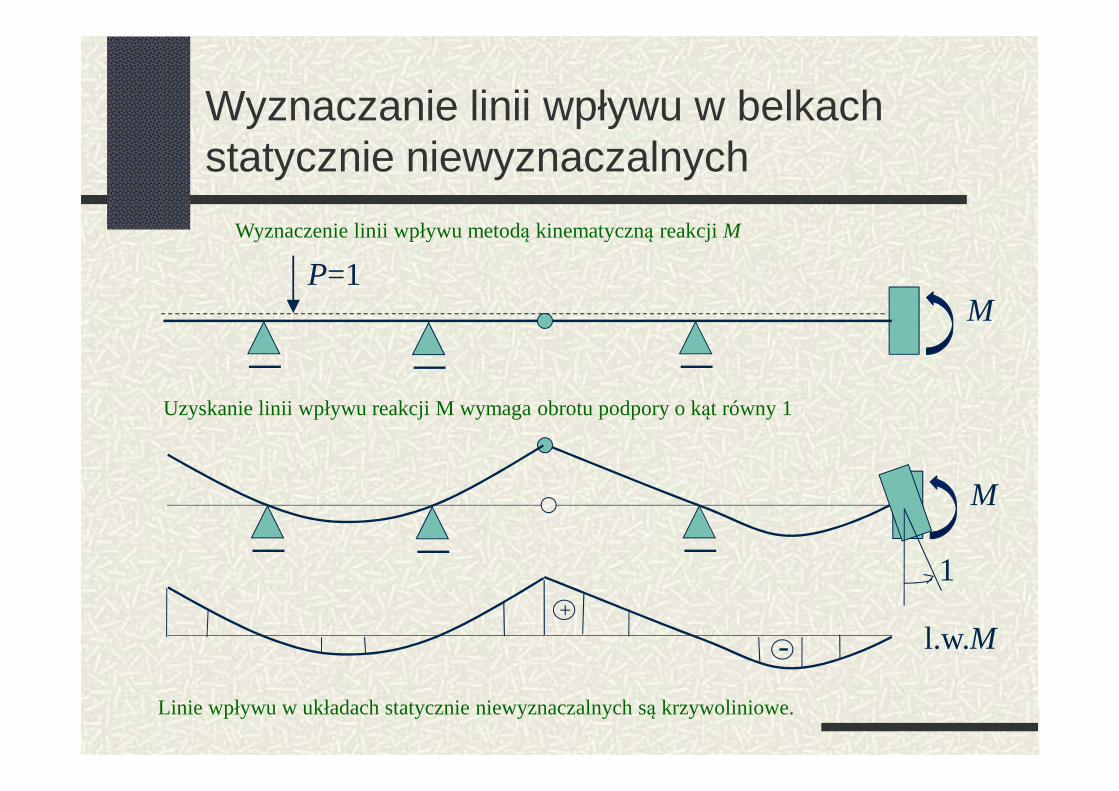
Wyznaczanie linii wpływu w belkach statycznie niewyznaczalnych
P=1M
Wyznaczenie linii wpływu metodą kinematyczną reakcjiM
M
Uzyskanie linii wpływu reakcji M wymaga obrotu podpory o kąt równy 1
1
l.w.M
Linie wpływu w układach statycznie niewyznaczalnych są krzywoliniowe.
-+
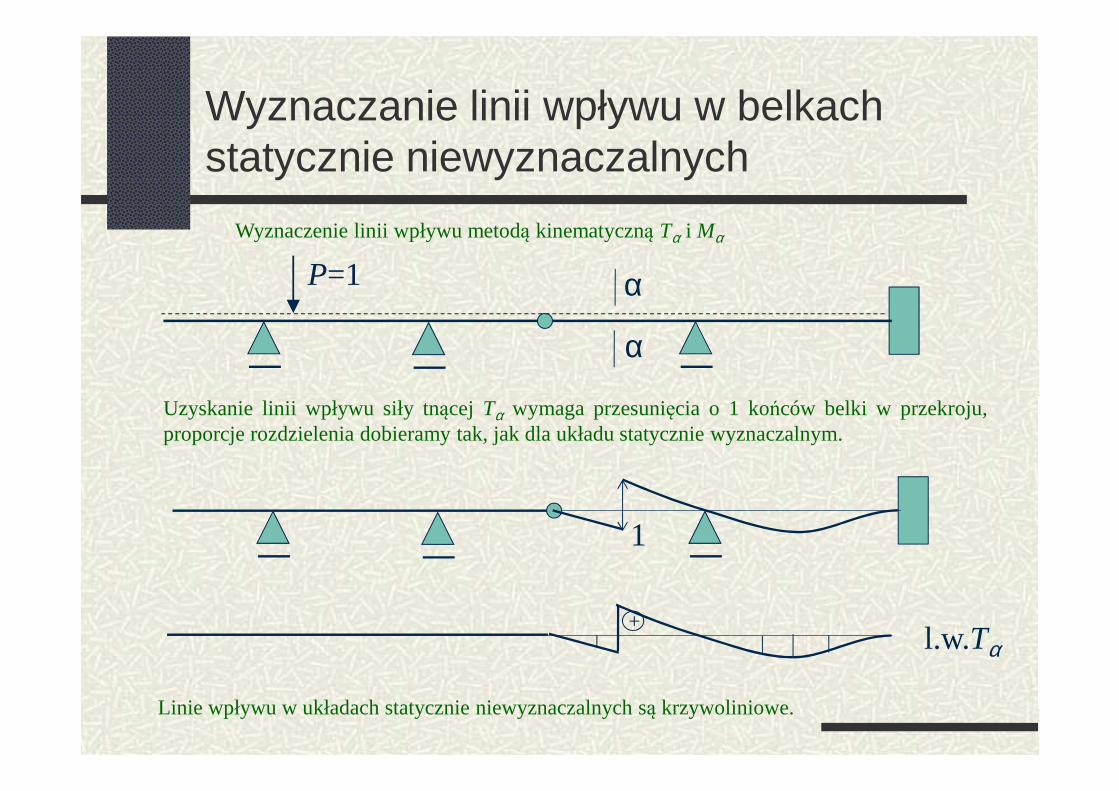
Wyznaczanie linii wpływu w belkach statycznie niewyznaczalnych
P=1
Wyznaczenie linii wpływu metodą kinematyczną Tα i Mα
α
α
Uzyskanie linii wpływu siły tnącej Tα wymaga przesunięcia o 1 końców belki w przekroju,proporcje rozdzielenia dobieramy tak, jak dla układu statycznie wyznaczalnym.
l.w.Tα
Linie wpływu w układach statycznie niewyznaczalnych są krzywoliniowe.
+
1
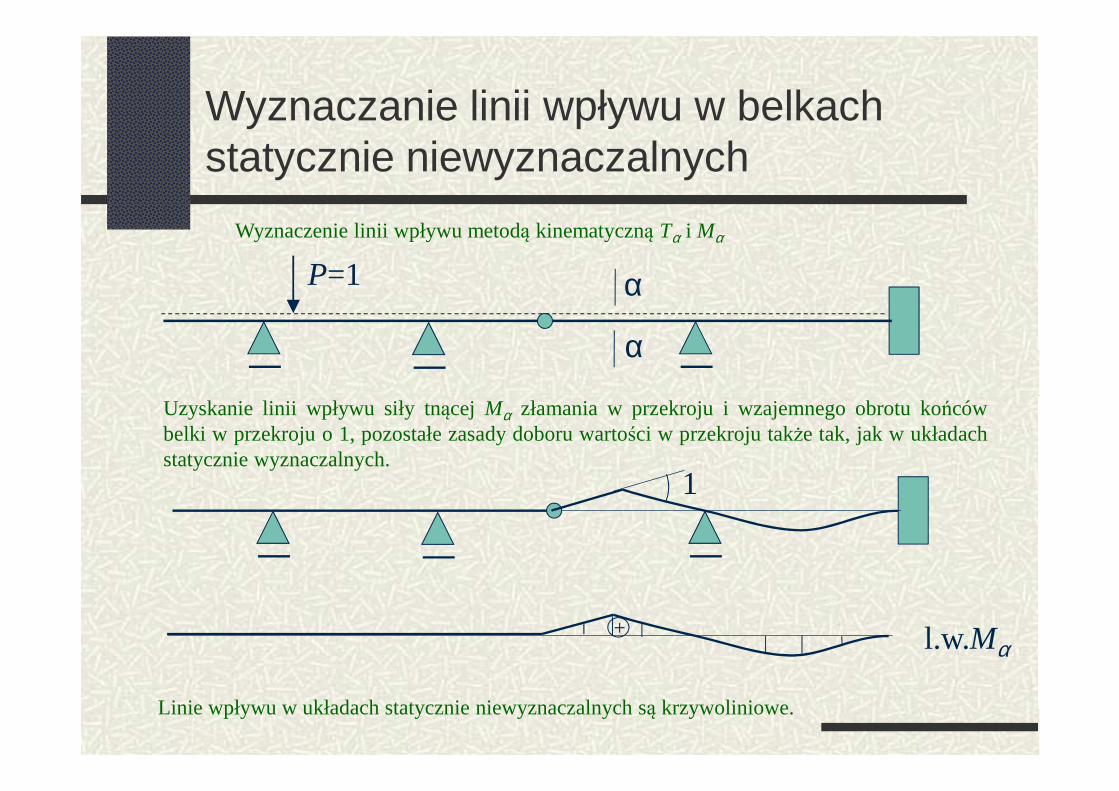
Wyznaczanie linii wpływu w belkach statycznie niewyznaczalnych
P=1
Wyznaczenie linii wpływu metodą kinematyczną Tα i Mα
α
α
Uzyskanie linii wpływu siły tnącej Mα złamania w przekroju i wzajemnego obrotu końcówbelki w przekroju o 1, pozostałe zasady doboru wartości w przekroju także tak, jak w układachstatycznie wyznaczalnych.
l.w.Mα
Linie wpływu w układach statycznie niewyznaczalnych są krzywoliniowe.
1
+
Zasada prac wirtualnych
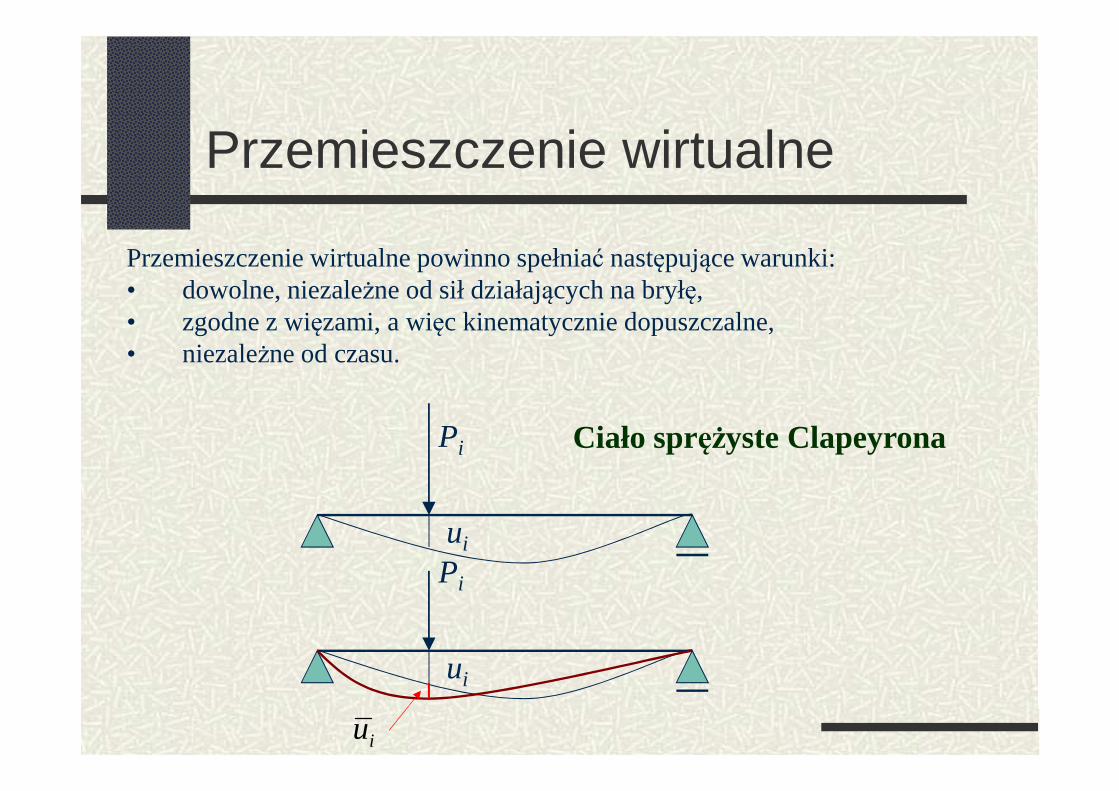
Przemieszczenie wirtualne powinno spełniać następujące warunki:• dowolne, niezależne od sił działających na bryłę,• zgodne z więzami, a więc kinematycznie dopuszczalne,• niezależne od czasu.
Przemieszczenie wirtualne
Pi
Pi
ui
Ciało sprężyste Clapeyrona
ui
iu
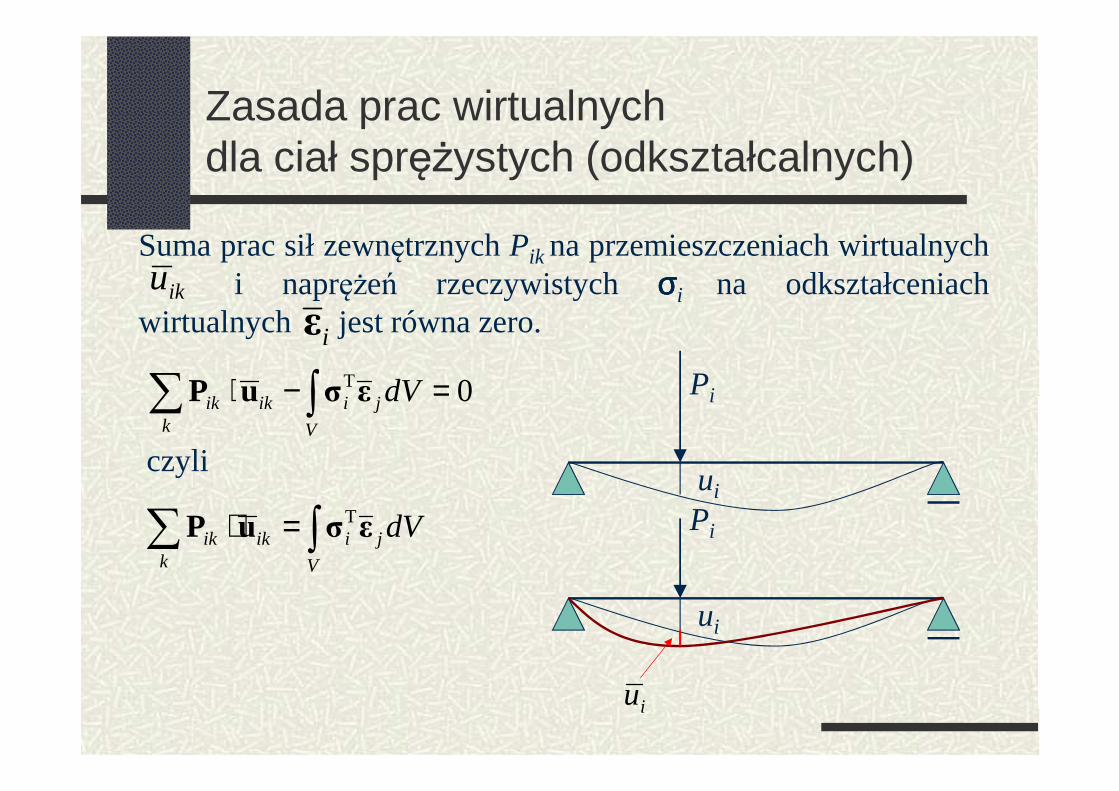
Suma prac sił zewnętrznychPik na przemieszczeniach wirtualnychi naprężeń rzeczywistych σσσσi na odkształceniach
wirtualnych jest równa zero.
Zasada prac wirtualnych dla ciał sprężystych (odkształcalnych)
Pi
iku
iε
0T =−⋅ ∫∑ jiikik dVεσuP
Pi
Pi
ui
ui
iu
0=−⋅ ∫∑V
jik
ikik dVεσuP
czyli
∫∑ =⋅V
jik
ikik dVεσuP T
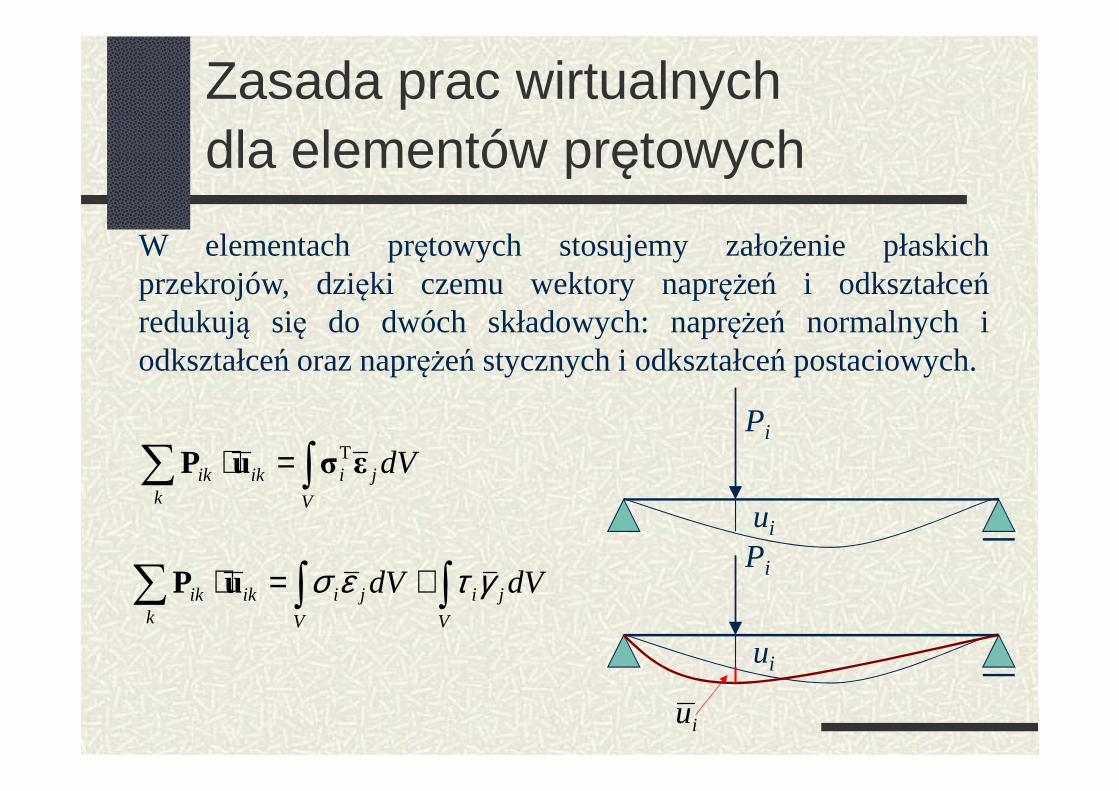
W elementach prętowych stosujemy założenie płaskichprzekrojów, dzięki czemu wektory naprężeń i odkształceńredukują się do dwóch składowych: naprężeń normalnych iodkształceń oraz naprężeń stycznych i odkształceń postaciowych.
Zasada prac wirtualnych dla elementów prętowych
Pi
Pi
ui
ui
iu
∫∫∑ +=⋅V
ji
V
jik
ikik dVdV γτεσuP
∫∑ =⋅V
jik
ikik dVεσuP T
Koniec