Stopień Brouwera - mif.pg.gda.pl bifurkacji/Skr-2003.pdf · ROZDZIAŁ 1 Stopień Brouwera 1....
37
ROZDZIAL 1 Stopień Brouwera 1. Definicja i wlasności stopnia W tym podrozdziale przypominamy w zarysie definicję stopnia Brouwera (stop- nia topologicznego) oraz podstawowe jego wlasności. Czytelnik, dla którego jest to nowy material, brakujące dowody znajdzie na przyklad w [Kraw97]i[Miln69]. Definicja 1.1. Niech f :Ω → R n będzie odwzorowaniem klasy C 1 określonym na zbiorze otwartym Ω ⊂ R n . • x 0 ∈ Ω jest punktem regularnym odwzorowania f , jeżeli Df (x 0 ): R n → R n jest izomorfizmem. • x 0 ∈ Ω jest punktem krytycznym (osobliwym) odwzorowania f , jeżeli nie jest punktem regularnym. Przyklad 1.1. Niech f : R 3 → R 3 będzie odwzorowaniem danym wzorem f (x, y, z)=(x 3 - 3xy 2 , 3x 2 y - y 3 ,z). Ponieważ Df (x, y, z)= 3x 2 - 3y 2 -6xy 0 6xy 3x 2 - 3y 2 0 0 0 1 oraz det Df (x, y, z) = 9(x 2 + y 2 ) 2 , więc zbiór {(0, 0,z) ∈ R 3 : z ∈ R} jest zbiorem punktów krytycznych odwzorowania f . Przyklad 1.2. Niech f (x) = sin x dla każdego x ∈ R. Wtedy zbiorem punk- tów krytycznych funkcji f jest zbiór { π 2 + kπ : k ∈ Z}. Definicja 1.2. Niech f :Ω → R n będzie odwzorowaniem klasy C 1 określonym na zbiorze otwartym Ω ⊂ R n . • y 0 ∈ R n jest wartością regularną odwzorowania f , jeżeli albo f -1 ({y 0 })= ∅ albo wszystkie punkty w f -1 ({y 0 }) są regularne. • y 0 ∈ R n jest wartością krytyczną (osobliwą ) odwzorowania f , jeżeli nie jest wartością regularną. Nietrudno zauważyć, że zbiór wartości krytycznych odwzorowania f jest obrazem zbioru punktów krytycznych tego odwzorowania. Przyklad 1.3. Zbiór {(0, 0,z) ∈ R 3 : z ∈ R} jest zbiorem wartości krytycznych odwzorowania f z przykladu 1.1. Przyklad 1.4. Jedynymi wartościami krytycznymi funkcji sinus są -1 i 1. Twierdzenie 1.1 (Sard, 1942). Jeżeli f :Ω → R n jest odwzorowaniem klasy C 1 określonym na zbiorze otwartym Ω ⊂ R n , to zbiór wartości krytycznych tego odwzorowania ma miarę Lebesgue’a równą zeru. Ponieważ zbiór miary zero nie może zawierać niepustego zbioru otwartego, więc z twierdzenia Sarda wynika następujący wniosek. Wniosek 1.1 (Brown, 1935). Jeżeli f :Ω → R n jest odwzorowaniem klasy C 1 określonym na zbiorze otwartym Ω ⊂ R n , to zbiór wartości regularnych tego odwzorowania jest gęsty w R n . 1
Transcript of Stopień Brouwera - mif.pg.gda.pl bifurkacji/Skr-2003.pdf · ROZDZIAŁ 1 Stopień Brouwera 1....

ROZDZIAŁ 1
Stopień Brouwera
1. Definicja i własności stopnia
W tym podrozdziale przypominamy w zarysie definicję stopnia Brouwera (stop-nia topologicznego) oraz podstawowe jego własności. Czytelnik, dla którego jest tonowy materiał, brakujące dowody znajdzie na przykład w [Kraw97] i [Miln69].
Definicja 1.1. Niech f : Ω → Rn będzie odwzorowaniem klasy C1 określonymna zbiorze otwartym Ω ⊂ Rn.
• x0 ∈ Ω jest punktem regularnym odwzorowania f , jeżeli Df(x0) : Rn →Rn jest izomorfizmem.
• x0 ∈ Ω jest punktem krytycznym (osobliwym) odwzorowania f , jeżeli niejest punktem regularnym.
Przykład 1.1. Niech f : R3 → R3 będzie odwzorowaniem danym wzoremf(x, y, z) = (x3 − 3xy2, 3x2y − y3, z). Ponieważ
Df(x, y, z) =
3x2 − 3y2 −6xy 06xy 3x2 − 3y2 00 0 1
oraz detDf(x, y, z) = 9(x2 + y2)2, więc zbiór (0, 0, z) ∈ R3 : z ∈ R jest zbiorempunktów krytycznych odwzorowania f .
Przykład 1.2. Niech f(x) = sinx dla każdego x ∈ R. Wtedy zbiorem punk-tów krytycznych funkcji f jest zbiór π
2 + kπ : k ∈ Z.Definicja 1.2. Niech f : Ω → Rn będzie odwzorowaniem klasy C1 określonym
na zbiorze otwartym Ω ⊂ Rn.• y0 ∈ Rn jest wartością regularną odwzorowania f , jeżeli albo f−1(y0) =∅ albo wszystkie punkty w f−1(y0) są regularne.
• y0 ∈ Rn jest wartością krytyczną (osobliwą) odwzorowania f , jeżeli niejest wartością regularną.
Nietrudno zauważyć, że zbiór wartości krytycznych odwzorowania f jest obrazemzbioru punktów krytycznych tego odwzorowania.
Przykład 1.3. Zbiór (0, 0, z) ∈ R3 : z ∈ R jest zbiorem wartości krytycznychodwzorowania f z przykładu 1.1.
Przykład 1.4. Jedynymi wartościami krytycznymi funkcji sinus są −1 i 1.
Twierdzenie 1.1 (Sard, 1942). Jeżeli f : Ω → Rn jest odwzorowaniem klasyC1 określonym na zbiorze otwartym Ω ⊂ Rn, to zbiór wartości krytycznych tegoodwzorowania ma miarę Lebesgue’a równą zeru.
Ponieważ zbiór miary zero nie może zawierać niepustego zbioru otwartego, więc ztwierdzenia Sarda wynika następujący wniosek.
Wniosek 1.1 (Brown, 1935). Jeżeli f : Ω → Rn jest odwzorowaniem klasyC1 określonym na zbiorze otwartym Ω ⊂ Rn, to zbiór wartości regularnych tegoodwzorowania jest gęsty w Rn.
1

2 1. STOPIEŃ BROUWERA
Dowody twierdzenia 1.1 i wniosku 1.1 można znaleźć w [Miln69].Niech Ω będzie otwartym i ograniczonym podzbiorem Rn, a f : Ω → Rn będzie
odwzorowaniem ciągłym. Mówimy, że f jest Ω-dopuszczalne lub że para (f,Ω)jest dopuszczalna, jeżeli f(x) 6= 0 dla każdego x ∈ ∂Ω. Rodzinę odwzorowańΩ-dopuszczalnych oznaczać będziemy symbolem A(Ω). Natomiast rodzinę tychf ∈ A(Ω), że f|Ω jest klasy C1 oznaczać będziemy symbolem A′(Ω). Odwzorowanief ∈ A′(Ω) jest generyczne, jeżeli 0 jest wartością regularną f|Ω.
Przykład 1.5. Niech f : R → R będzie funkcją daną wzorem f(x) = coshx.Ponieważ f jest klasy C1 oraz f−1(0) = ∅, więc dla dowolnego zbioru otwartegoi ograniczonego Ω ⊂ R odwzorowanie f|Ω jest generyczne.
Przykład 1.6. Niech f : R2 → R2 będzie odwzorowaniem klasy C1 danymwzorem f(x, y) = (x2 + y2 − 1, sinh(x+ y)), a B(0, r) ⊂ R2 będzie kulą o środku wzerze i promieniu r > 0. Ponieważ f−1((0, 0)) = (
√2
2 ,−√
22 ), (−
√2
2 ,√
22 ), więc
f /∈ A(B(0, 1)). Co więcej, detDf(x, y) = 2(x − y) cosh(x + y) i detDf(x, y) = 0tylko wtedy, gdy x = y. Zatem f|B(0,r)
jest generyczne dla każdego r 6= 1.
Każdemu odwzorowaniu f ∈ A(Ω) możemy przyporządkować liczbę całkowitądeg(f,Ω) nazywaną stopniem Brouwera lub stopniem topologicznym odwzorowaniaf na zbiorze Ω. Konstrukcja stopnia, której szkic podajemy poniżej, przebiega wtrzech etapach. W pierwszym etapie definiujemy stopień dla odwzorowania gen-erycznego, w drugim dla odwzorowania z A′(Ω), a w trzecim dla odwzorowania zA(Ω).
Stopień Brouwera odwzorowania generycznego f : Ω → Rn na zbiorze Ω defini-ujemy wzorem:
(1) deg(f,Ω) :=∑
x∈f−1(0)∩Ω
sign detDf(x).
Gdy f jest generyczne, to zbiór f−1(0) ∩ Ω jest pusty lub składa się ze skońc-zonej liczby punktów. Zatem wzór (1) jest poprawny. Co więcej, jeżeli przez p+
oznaczymy liczbę tych x ∈ f−1(0) ∩ Ω, dla których detDf(x) > 0, a przez p−liczbę tych x ∈ f−1(0) ∩ Ω, dla których detDf(x) < 0, to deg(f,Ω) = p+ − p−.
Przykład 1.7. Niech Ω ⊂ R2 będzie trójkątem ograniczonym prostymi x+y =3, x = 0 i y = 1, a f : R2 → R2 będzie odwzorowaniem danym wzorem f(x, y) =(−x2 + 2x+ y − 5
2 ,32x− y). Wtedy f−1((0, 0)) = ( 5
2 ,154 ), (1, 3
2 ) i (1, 32 ) ∈ Ω, a
( 52 ,
154 ) /∈ Ω. Ponieważ detDf(x, y) = 2x − 7
2 , więc detDf((1, 32 )) = − 3
2 < 0. Wkonsekwencji, f|Ω jest generyczne i deg(f,Ω) = −1.
Przykład 1.8. Jeżeli odwzorowanie f ∈ A′(Ω) oraz f−1(0) = ∅, to f jestgeneryczne i deg(f,Ω) = 0.
Żeby zdefiniować stopień Brouwera dla dowolnego odwzorowania f ∈ A′(Ω),wprowadzimy pojęcie homotopii Ω-dopuszczalnej.
Definicja 1.3. Niech Ω będzie otwartym i ograniczonym podzbiorem Rn.(1) Odwzorowanie h : Ω× [0, 1] → Rn nazywamy Ω-dopuszczalną homotopią,
jeżeli jest ciągłe i h(x, t) 6= 0 dla wszystkich x ∈ ∂Ω i t ∈ [0, 1].(2) Niech f0, f1 ∈ A(Ω). Mówimy, że odwzorowanie f0 jest homotopijne z
odwzorowaniem f1 w A(Ω), co zapisujemy f0 ∼ f1 w A(Ω), jeżeli istniejehomotopia Ω-dopuszczalna taka, że h(x, i) = fi(x) dla każdego x ∈ Ω orazi = 0, 1.
Jeżeli h(x, t) = (1−t)f0(x)+tf1(x) jest homotopią Ω-dopuszczalną, to h nazywamyhomotopią liniową. Homotopijność odwzorowań Ω-dopuszczalnych jest relacją równoważności

1. DEFINICJA I W“ASNOśCI STOPNIA 3
w zbiorze A(Ω). Dlatego zamiast mówić, że f0 jest homotopijne z f1, możemy teżmówić, że f0 i f1 są homotopijne. Rodzinę wszystkich Ω-dopuszczalnych homotopiioznaczać będziemy symbolem HA(Ω). Jeżeli h ∈ HA(Ω), to dla każdego t ∈ [0, 1]odwzorowanie ht : Ω → Rn dane jest wzorem ht(x) := h(x, t).
Przykład 1.9. Niech f0(x) = x3 i f1(x) = x5 dla x ∈ (−1, 1). Odwzorowa-nia f0 i f1 są homotopijne w A((−1, 1)). Aby to wykazać, wystarczy sprawdzić,że h(x, t) = (1 − t)x3 + tx5 dla (x, t) ∈ [−1, 1] × [0, 1] jest homotopią (−1, 1)-dopuszczalną. Rzeczywiście, mamy h(−1, t) = −1 6= 0 i h(1, t) = 1 6= 0 dla każdegot ∈ [0, 1].
Fakt 1.1. Niech f ∈ A(Ω) i d = inf|f(x)| : x ∈ ∂Ω. Jeżeli g : Ω → Rn jestodwzorowaniem ciągłym i |f(x)− g(x)| < d dla każdego x ∈ ∂Ω, to g ∈ A(Ω) orazf i g są homotopijne.
Fakt 1.2. Jeżeli dwa odwzorowania generyczne f0 i f1 są homotopijne, todeg(f0,Ω) = deg(f1,Ω).
Dowód powyższego faktu znajduje się między innymi w [Kraw97].Weźmy f ∈ A′(Ω). Niech d = inf|f(x)| : x ∈ ∂Ω. Na mocy wniosku 1.1
istnieje y ∈ Rn takie, że y jest wartością regularną odwzorowania f|Ω i |y| < d.Wtedy odwzorowanie gy : Ω → Rn dane wzorem gy(x) = f(x)− y jest generyczne.Co więcej, z faktu 1.1 wynika, że f ∼ gy w A(Ω). Stopień Brouwera odwzorowaniaf na zbiorze Ω definiujemy wzorem
(2) deg(f,Ω) := deg(gy,Ω).
W świetle faktów 1.1 i 1.2 powyższa definicja nie zależy od wyboru y. Jeżeli bowiemz ∈ Rn jest wartością regularną odwzorowania f|Ω taką, że |z| < d i z 6= y, toodwzorowanie gz(x) = f(x)− z jest generyczne oraz gy i gz są homotopijne.
Przykład 1.10. Niech f : R → R będzie dane wzorem f(x) = xn, gdzie n ∈ N.Przyjmijmy, że Ω = (−r, r), gdzie r > 0. Wówczas f−1(0) ∩ Ω = 0 orazinf|f(x)| : x ∈ ∂Ω = rn. Jeżeli n = 1, to 0 jest wartością regularną funkcjif oraz deg(f,Ω) = signf ′(0) = 1. Jeżeli n 6= 1, to 0 jest wartością krytycznąfunkcji f . Wówczas deg(f,Ω) = deg(f−y,Ω), gdzie y jest taką wartością regularnąfunkcji f , że y ∈ (0, rn). Ponieważ f−1(y) = − n
√y, n√y dla n parzystych i
f−1(y) = n√y dla n nieparzystych, więc
(3) deg(f,Ω) =
0, gdy n jest parzyste,1, gdy n jest nieparzyste.
Fakt 1.3. Jeżeli f ∈ A(Ω), to istnieje odwzorowanie generyczne g : Ω → Rn
takie, że f i g są homotopijne.
Dowód powyższego faktu Czytelnik znajdzie w [Kraw97].Weźmy f ∈ A(Ω). Niech g będzie odwzorowaniem generycznym takim, że f i g
są homotopijne. Wówczas stopień Brouwera odwzorowania f na zbiorze Ω możemyzdefiniować następująco
(4) deg(f,Ω) := deg(g,Ω).
Z faktu 1.2 wynika, że powyższy wzór jest poprawny.
Przykład 1.11. Niech f(x) = |x| dla x ∈ [−r, r], gdzie 0 < r < 1. Gdy x ∈−r, r, to |f(x)−x2| = |r−r2| < r. Zatem na mocy faktu 1.1 odwzorowanie f jesthomotopijne z odwzorowaniem x2
|[−r,r]. W świetle przykładu 1.10, deg(f, (−r, r)) =0.
Oznaczmy przez M zbiór wszystkich par dopuszczalnych (f,Ω).

4 1. STOPIEŃ BROUWERA
Definicja 1.4. Stopniem Brouwera nazywamy odwzorowanie deg : M → Z,które parze dopuszczalnej (f,Ω) przyporządkowuje deg(f,Ω).
Podamy teraz podstawowe własności stopnia Brouwera. Ich dowody Czytelnikznajdzie w [Kraw97].
Własność 1.1 (Normalizacja). Niech Ω ⊂ Rn będzie zbiorem otwartym iograniczonym. Niech x0 ∈ Rn będzie punktem takim, że x0 /∈ ∂Ω. Wtedy
(5) deg(Id− x0,Ω) =
1, gdy x0 ∈ Ω,0, gdy x0 /∈ Ω,
gdzie Id : Rn → Rn jest odwzorowaniem tożsamościowym.
Własność 1.2 (Homotopijna niezmienniczość). Niech f, g ∈ A(Ω). Jeżeli f ig są homotopijne, to deg(f,Ω) = deg(g,Ω).
Własność 1.3 (Addytywność). Niech Ω ⊂ Rn będzie zbiorem otwartym, ogranic-zonym i niech Ω1,Ω2 ⊂ Ω będą takimi zbiorami otwartymi, że Ω1 ∩ Ω2 = ∅. Jeżelif ∈ A(Ω) i 0 /∈ f(Ω \ (Ω1 ∪ Ω2)), to
deg(f,Ω) = deg(f,Ω1) + deg(f,Ω2).
Własność 1.4 (Wycinanie). Jeżeli f ∈ A(Ω) oraz Ω0 ⊂ Ω jest zbiorem ot-wartym takim, że 0 /∈ f(Ω \ Ω0), to deg(f,Ω) = deg(f,Ω0).
Własność 1.5 (Istnienie). Jeżeli f ∈ A(Ω) i deg(f,Ω) 6= 0, to istnieje punktx0 ∈ Ω taki, że f(x0) = 0.
Własność 1.6 (Ciągłość). Dla każdego niepustego, otwartego i ograniczonegozbioru Ω ⊂ Rn odwzorowanie deg|A(Ω) : A(Ω) → Z jest ciągłe. Precyzyjniej, jeżelimax|f(x)− g(x)| : x ∈ Ω < min|f(x)| : x ∈ ∂Ω, to deg(f,Ω) = deg(g,Ω).
Własność 1.7. Niech Ω ⊂ Rn będzie zbiorem otwartym, niepustym i ogranic-zonym. Jeżeli f, g ∈ A(Ω) oraz f(x) = g(x) dla każdego x ∈ ∂Ω, to deg(f,Ω) =deg(g,Ω).
Własność 1.8 (Formuła produktowa). Załóżmy, że Ω ⊂ Rn×Rm jest zbioremotwartym, niepustym i ograniczonym. Niech Ωx ⊂ Rn będzie rzutem Ω na Rn, ag : Ω → Rn × Rm odwzorowaniem ciągłym danym wzorem g(x, y) = (f(x, y), y).Wówczas, jeżeli g jest Ω-dopuszczalne, to f|Ωx
jest Ωx-dopuszczalne i deg(g,Ω) =deg(f,Ωx).
2. Zastosowania stopnia Brouwera w teorii bifurkacji
W niniejszym podrozdziale wprowadzimy podstawowe pojęcia z teorii bifurkacjii przytoczymy kilka bardzo dobrze znanych w tej teorii twierdzeń, które korzystająze stopnia Brouwera. Dowody tych twierdzeń Czytelnik może znaleźć w [?].
Załóżmy, że f : Rn × R → Rn jest odwzorowaniem ciągłym i f(0, λ) = 0 dlakażdego λ ∈ R. Rozważmy równanie
(6) f(x, λ) = 0.
Punkt (x, λ) ∈ Rn × R taki, że f(x, λ) = 0 i x 6= 0 nazywamy nietrywialnymrozwiązaniem równania (6). Natomiast dowolny punkt (0, λ) ∈ Rn×R jest trywial-nym rozwiązaniem równania (6).
Definicja 1.5. Punkt λ0 ∈ R nazywamy punktem bifurkacji równania (6),jeżeli każde otoczenie punktu (0, λ0) ∈ Rn × R zawiera nietrywialne rozwiązanierównania (6), t.j.
(0, λ0) ∈ (x, λ) ∈ Rn × R : f(x, λ) = 0, x 6= 0.

2. ZASTOSOWANIA STOPNIA BROUWERA W TEORII BIFURKACJI 5
-
6x
λ
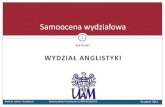
Rysunek 1. Bifurkacja w kształcie ”widelca”
Uwaga 1.1. λ0 jest punktem bifurkacji równania (6) wtedy i tylko wtedy, gdyistnieje ciąg (xn, λn)n∈N taki, że (xn, λn) → (0, λ0), gdy n→∞ oraz f(xn, λn) =0 i xn 6= 0 dla każdego n ∈ N.
Przykład 1.12. Rozważmy równanie
(7) x3 − λx = 0,
(x, λ) ∈ R × R. Zbiór rozwiązań równania (7) przedstawia rys.1. Gdy λ ≤ 0,jedynym rozwiązaniem równania (7) jest (0, λ). Gdy λ > 0, równanie (7) ma trzyrozwiązania: (0, λ), (
√λ, λ) i (−
√λ, λ). Punkt 0 jest punktem bifurkacji w kształcie
widelca (ang. pitchfork bifurcation point). Patrząc na rys.1, przekonujemy się otrafności tego ogólnie przyjętego określenia.
Załóżmy teraz, że f : Rn × R → Rn jest odwzorowaniem klasy C1. Wówczasz twierdzenia o funkcji uwikłanej wynika następujący warunek konieczny na to, bypunkt λ0 był punktem bifurkacji równania (6).
Stwierdzenie 1.1. Jeżeli punkt λ0 ∈ R jest punktem bifurkacji równania (6),to Dxf(0, λ0) : Rn → Rn nie jest izomorfizmem.
Zatem punktów bifurkacji równania (6) należy szukać wyłącznie w zbiorze
B(f) := λ ∈ R : Dxf(0, λ) /∈ GL(Rn).Twierdzenie 1.2 (Krasnosielski). Przyjmijmy następujące założenia:
(Z1) λ0 ∈ B(f),(Z2) ∃δ>0 B(f) ∩ [λ0 − δ, λ0 + δ] = λ0,(Z3) ∃r0>0 ∀0<r≤r0 deg(f(·, λ0 − δ), B(0, r))− deg(f(·, λ0 + δ), B(0, r)) 6= 0.
Wówczas λ0 jest punktem bifurkacji równania (6).
Uwaga 1.2. Jeżeli λ /∈ B(f), to z twierdzenia o lokalnym odwracaniu odw-zorowań wynika, że istnieje r > 0 takie, że para (f(·, λ), B(0, r)) jest dopuszczalnaoraz deg(f(·, λ), B(0, r)) = sign detDxf(0, λ). Zatem warunek (Z3) jest równoważnyz warunkiem detDxf(0, λ0 − δ) · detDxf(0, λ0 + δ) < 0.
Uwaga 1.3. Jeżeli λ0, λ1 ∈ B(f) oraz (λ0, λ1)∩B(f) = ∅, to sign detDxf(0, λ)= const dla każdego λ ∈ (λ0, λ1).
Dla punktu λ0 ∈ R spełniającego założenia (Z1), (Z2) twierdzenia Krasnosielskiegodefiniujemy σ(λ0) następująco:
σ(λ0) := deg(f(·, λ0 + δ), B(0, r))− deg(f(·, λ0 − δ), B(0, r)),
gdzie B(0, r) ∩ x ∈ Rn : f(x, λ0 − δ) = f(x, λ0 + δ) = 0 = 0.

6 1. STOPIEŃ BROUWERA
Twierdzenie 1.3 (Alternatywa Krasnosielskiego). Jeżeli spełnione są założe-nia (Z1)− (Z3) twierdzenia 1.2 oraz Sλ0 jest składową spójności domknięcia zbiorunietrywialnych rozwiązań równania (6) zawierającą punkt (0, λ0), to albo składowaSλ0 jest nieograniczona albo istnieje λ1 6= λ0 takie, że (0, λ1) ∈ Sλ0 .
Twierdzenie 1.4 (Rabinowitz). Załóżmy, że B(f) = λ1, λ2, . . . , λk. Wów-czas, jeżeli S jest ograniczoną składową spójności domknięcia zbioru nietrywialnychrozwiązań równania (6) oraz S ∩ B(f) = λi1 , λi2 , . . . , λij
, gdzie 1 ≤ i1 < i2 <. . . < ij ≤ k, to σ(λi1) + σ(λi2) + . . .+ σ(λij
) = 0.
ZadaniaZadanie 1. Pokazać, że homotopijność odwzorowań Ω-dopuszczalnych jest relacjąrównoważności w zbiorze A(Ω).Zadanie 2. Niech f : Ω → Rn będzie odwzorowaniem generycznym. Udowodnić,że f−1(0) ∩ Ω składa się ze skończonej liczby punktów.Zadanie 3. Pokazać, że jeśli ψ : [a, b] → R jest odwzorowaniem generycznym, tozachodzi równość
deg(ψ, (a, b)) = limε→0
∫ b
aχ[−ε,+ε](ψ(t))ψ′(t)dt
2ε.
Zadanie 4. Udowodnić fakt 1.1.Zadanie 5. Wykorzystując fakt 1.2 i wzór (1) udowodnić własności 1.1, 1.2 i 1.3.Zadanie 6. Pokazać, że deg(f, ∅) = 0.Zadanie 7. W oparciu o własność 1.3 i zadanie 6 udowodnić własność 1.4.Zadanie 8. Pokazać, że jeśli A : Rn → Rn jest izomorfizmem, to dla każdego r > 0zachodzi równość deg(A,B(0, r)) = sign detA = ±1.Zadanie 9. Obliczyć stopień Brouwera odwzorowania A : R3 → R3 danego wzoremA(x, y, z) = (x+ 4y + 2z, y,−3x+ 5y + 2z) na kuli B(0, 1).Zadanie 10. Obliczyć stopień Brouwera odwzorowania f(x) = (−(x − 1)2 + 1, y)na zbiorze Ω, gdy
(a) Ω jest trójkątem ograniczonym prostymi x = −1, y = −1, x+ y = 1,(b) Ω jest trójkątem ograniczonym prostymi −x+ y = 3, x+ y = 3, y = −1.
Zadanie 11. Niech f : R → R będzie parzystą funkcją klasy C1. Załóżmy, że ist-nieje r > 0 takie, że f(r) 6= 0. Wykazać, że jeśli f(0) = 0, to deg(f, (−r, r)) = 0.Zadanie 12. Niech f ∈ A′((a, b)) będzie odwzorowaniem monotonicznym. Obliczyćdeg(f, (a, b)).

ROZDZIAŁ 2
Stopień T -niezmienniczych odwzorowań w Rn
Z czasem teorię stopnia topologicznego zaczęto rozszerzać na różne klasy odw-zorowań niezmienniczych. W tym rozdziale przedstawiamy teorię stopnia odw-zorowań T -niezmienniczych. Stanowi ona część ogólniejszej teorii stopnia odw-zorowań G-niezmienniczych, gdy G jest skończoną grupą abelową. Do jej zbu-dowania nie jest potrzebna ani znajomość teorii reprezentacji ani topologii niezmi-enniczej. Prezentowane tu ujęcie teorii stopnia odwzorowań T -niezmienniczychzostało zaczerpnięte z książki [Gran03].
1. T -niezmiennicze odwzorowania i homotopie
Niech Rn = Rp⊕Rq, gdzie n, p i q są takimi liczbami naturalnymi, że n = p+q.Dla x ∈ Rn piszemy x = (u, v), gdzie u ∈ Rp i v ∈ Rq. Niech T : Rn → Rn będziedane wzorem
T (u, v) := (u,−v).Odwzorowanie T jest izomorfizmem liniowym i inwolucją, t.j. T 2 = Id|Rn .
Definicja 2.1. Zbiór X ⊂ Rn jest T -niezmienniczy, jeżeli T (X) ⊂ X.
Jeżeli zbiór X jest T -niezmienniczy, to T (X) = X i T|X : X → X jest inwolucją naX.
Definicja 2.2. Niech X ⊂ Rn będzie T -niezmienniczy.(1) Odwzorowanie f : X → Rn nazywamy odwzorowaniem T -niezmienniczym,
jeżeli dla każdego x ∈ X zachodzi równość f(Tx) = Tf(x).(2) Odwzorowanie h : X×[0, 1] → Rn nazywamy homotopią T -niezmienniczą,
jeżeli jest ciągłe oraz dla wszystkich x ∈ X, t ∈ [0, 1] zachodzi równośćh(Tx, t) = Th(x, t).
(3) Funkcję τ : X → R nazywamy funkcją T -niezmienniczą, jeżeli dla każdegox ∈ X zachodzi równość τ(Tx) = τ(x).
Jeżeli f = (f1, f2), gdzie f1 : X → Rp i f2 : X → Rq, to odwzorowanie f jest T -niezmiennicze wtedy i tylko wtedy, gdy f1(u,−v) = f1(u, v) i f2(u,−v) = −f2(u, v)dla wszystkich (u, v) ∈ X.
Każdy otwarty, ograniczony i T -niezmienniczy podzbiór Rn nazywamy dalejzbiorem T -dopuszczalnym.
Niech Ω ⊂ Rn będzie ustalonym zbiorem T -dopuszczalnym. Wówczas zbiór Ωjest T -niezmienniczy. Mówimy, że odwzorowanie f : Ω → Rn jest T -dopuszczalne,jeżeli f ∈ A(Ω) i f jest T -niezmiennicze. Zbiór wszystkich T -dopuszczalnych odw-zorowań z Ω w Rn oznaczamy symbolem AT (Ω). Analogicznie, mówimy, że ho-motopia h : Ω × [0, 1] → Rn jest T -dopuszczalna, jeżeli h ∈ HA(Ω) i h jest T -niezmiennicza. Zbiór wszystkich T -dopuszczalnych homotopii z Ω × [0, 1] w Rn
oznaczamy symbolem HAT (Ω).
Definicja 2.3. Odwzorowanie f jest homotopijne z odwzorowaniem g w zbiorzeAT (Ω), co zapisujemy f ∼ g w AT (Ω), jeżeli istnieje homotopia h ∈ HAT (Ω)łącząca f z g, t.j. taka, że h(x, 0) = f(x) i h(x, 1) = g(x) dla każdego x ∈ Ω.
7

8 2. STOPIEŃ T -NIEZMIENNICZYCH ODWZOROWAŃ W Rn
Homotopijność jest relacją równoważności w AT (Ω). Klasę homotopii odwzorowa-nia f ∈ AT (Ω) oznaczamy symbolem [f ], natomiast zbiór wszystkich takich klashomotopii symbolem HAT [Ω].
2. T -niezmiennicze odwzorowania generyczne
Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym. Przyjmijmy natępujące oz-naczenia:
A∞T (Ω) = f ∈ AT (Ω): f|Ω jest gładkie,HA∞T (Ω) = h ∈ HAT (Ω): ht|Ω jest gładkie dla t ∈ [0, 1].
Definicja 2.4. Mówimy, że f jest homotopijne z g w A∞T (Ω), co zapisujemyf v g w A∞T (Ω), jeżeli istnieje homotopia h ∈ HA∞T (Ω) łącząca f z g.
Odwzorowanie f ∈ A∞T (Ω) nazywamy odwzorowaniem generycznym, jeżeli 0 ∈ Rn
jest wartością regularną f|Ω.W niniejszym podrozdziale pokażemy, że przy pewnych dodatkowych restrykc-
jach na Ω każda klasa homotopii w HAT [Ω] zawiera T -niezmiennicze odwzorowaniegeneryczne. W tym celu udowodnimy najpierw kilka lematów.
Niech K ⊂ Rn będzie zbiorem zwartym, Uiki=1 będzie otwartym pokryciem
zbioru K, a U =⋃k
i=1 Ui. Przypomnijmy, że rodzinę funkcji gładkich λi : U →[0, 1], gdzie i = 1, 2, . . . , k, spełniających dwa następujące warunki:
• suppλi = x ∈ Rn : λi(x) 6= 0 ⊂ Ui dla każdego i = 1, 2, . . . , k,•∑k
i=1 λi(y) = 1 dla każdego y ∈ Knazywamy gładkim rozkładem jedności stowarzyszonym z pokryciem Uik
i=1 zbioruK. Wiadomo, że taki rozkład zawsze istnieje (patrz [?]).
Odwzorowanie f : K → Rn nazywamy gładkim, jeżeli istnieje zbiór otwartyX ⊂ Rn taki, że K ⊂ X i istnieje odwzorowanie f : X → Rn, które jest gładkie if|K = f .
Lemat 2.1. Niech K ⊂ Rn będzie zbiorem zwartym i T -niezmienniczym, aUik
i=1 otwartym i T -niezmienniczym pokryciem zbioru K. Wówczas istniejegładki i T -niezmienniczy rozkład jedności stowarzyszony z pokryciem Uik
i=1 zbioruK.
Dowód. Niech λiki=1 będzie gładkim rozkładem jedności stowarzyszonym z
pokryciem Uiki=1 zbioru K. Dla każdego i = 1, 2, . . . , k niech λi będzie dane
wzorem λi = 12 (λi + λiT ). Funkcje λi są oczywiście gładkie i T -niezmiennicze.
Rodzina λiki=1 spełnia tezę lematu.
Niech K ⊂ Rn będzie zbiorem zwartym i T -niezmienniczym. Mówimy, że Tdziała wolno na zbiorze K, jeżeli Tx 6= x dla każdego x ∈ K. Innymi słowy,K ∩ Rp = ∅. Wówczas dist(K,Rp) := inf|x − y| : x ∈ K, y ∈ Rp jest liczbądodatnią.
Lemat 2.2. Niech K ⊂ Rn będzie zbiorem zwartym i T -niezmienniczym takim,że T działa wolno na K. Jeżeli odwzorowanie f : K → Rn jest ciągłe i T -niezmiennicze,to dla każdego ε > 0 istnieje gładkie i T -niezmiennicze odwzorowanie g : K → Rn
takie, że supx∈K |f(x)− g(x)| < ε.
Dowód. Weźmy ε > 0. Ponieważ K jest zbiorem zwartym, więc f jest odw-zorowaniem jednostajnie ciągłym. Istnieje zatem δ > 0 taka, że |f(x)−f(y)| < ε, oile |x− y| < δ. Niech δ′ = minδ,dist(K,Rp), a Ux = B(x, δ′) dla każdego x ∈ K.Wówczas
• TUx = B(Tx, δ′),

2. T -NIEZMIENNICZE ODWZOROWANIA GENERYCZNE 9
• Ux ∩ TUx = ∅,• K ⊂
⋃x∈K(Ux ∪ TUx).
Ze zwartości zbioru K wynika, że istnieją punkty x1, x2, . . . , xk ∈ K takie, żeK ⊂
⋃ki=1(Ui ∪ TUi), gdzie Ui = Uxi
. Weźmy gładki i T -niezmienniczy rozkładjedności λik
i=1 stowarzyszony z pokryciem Ui ∪ TUiki=1 zbioru K. Niech U =⋃k
i=1(Ui ∪ TUi). Niech πi : U → Rn dla każdego i ∈ 1, 2, . . . , k będzie odw-zorowaniem takim, że πi(Ui) = xi, a πi(TUi) = Txi. Odwzorowanie g : U →Rn definiujemy wzorem
g(x) =k∑
i=1
λi(x)f(πi(x)).
Weźmy x ∈ U . Jeżeli x ∈ Ui ∪ TUi, to w odpowiednio małym otoczeniu punktu xodwzorowanie f πi jest stałe. Jeżeli x ∈ ∂Ui∪∂TUi, to dostatecznie blisko punktux funkcja λi jest równa 0. Zatem g jest gładkie.Weźmy teraz x ∈ K. Jeżeli x ∈ Ui, to πi(x) = xi i |πi(x)− x| < δ. Jeżeli x ∈ TUi,to πi(x) = Txi i |πi(x) − x| < δ. Jeżeli natomiast x /∈ Ui ∪ TUi, to λi(x) = 0.Wobec tego
|g(x)−f(x)| = |k∑
i=1
λi(x)f(πi(x))−k∑
i=1
λi(x)f(x)| ≤k∑
i=1
λi(x)|f(πi(x))−f(x)| < ε,
co więcej,
g(Tx) =k∑
i=1
λi(Tx)f(πi(Tx)) =k∑
i=1
λi(x)f(Tπi(x)) =k∑
i=1
λi(x)Tf(πi(x)) = Tg(x).
Wniosek 2.1. Niech Ω ⊂ Rn będzie takim zbiorem T -dopuszczalnym, że Tdziała wolno na Ω. Wówczas dla każdego f ∈ AT (Ω) istnieje g ∈ A∞T (Ω) takie, żef ∼ g w AT (Ω).
Niech U ⊂ Rn będzie zbiorem otwartym i ograniczonym, a K takim zbioremzwartym, że K ⊂ U . Wówczas wiadomo, że istnieje funkcja gładka η : Rn → [0, 1]taka, że
η(x) =
1 dla x ∈ K,0 dla x ∈ Rn \ U.
W literaturze matematycznej η jest nazywane funkcją Urysohna (patrz [?]).
Lemat 2.3. Niech U i U0 będą T -dopuszczalnymi podzbiorami Rn. Załóżmy, żeU0 ⊂ U . Wówczas istnieje gładka i T -niezmiennicza funkcja η : Rn → [0, 1] taka,że η(x) = 1 dla x ∈ U0 i η(x) = 0 dla x ∈ Rn \ U .
Prosty dowód powyższego lematu pozostawiamy Czytelnikowi.
Lemat 2.4. Niech Ω0 i Ω będą T -dopuszczalnymi podzbiorami Rn takimi, żeΩ0 ⊂ Ω. Załóżmy, że f0, g0 ∈ A∞T (Ω0) są homotopijne w A∞T (Ω0) i istniejef ∈ A∞T (Ω) takie, że f|Ω0 = f0. Wówczas istnieją odwzorowanie g ∈ A∞T (Ω) iT -dopuszczalny zbiór U0 ⊂ Ω0 spełniające następujące warunki:
(1) f v g w A∞T (Ω),(2) g(x) = f(x) dla każdego x ∈ Ω \ Ω0,(3) g−1
0 (0) ∩ Ω0 = g−1(0) ∩ Ω0 ⊂ U0,(4) g(x) = g0(x) dla każdego x ∈ U0.

10 2. STOPIEŃ T -NIEZMIENNICZYCH ODWZOROWAŃ W Rn
Dowód. Niech k ∈ HA∞T (Ω0) będzie homotopią łączącą f0 z g0. Weźmyotwarty i T -niezmienniczy zbiór U0 w Ω0 taki, że U0 ⊂ Ω0 oraz k(x, t) 6= 0 dlakażdego (x, t) ∈ (Ω0 \ U0) × [0, 1]. Następnie weźmy otwarty i T -niezmienniczyzbiór U w Ω0 taki, że U0 ⊂ U ⊂ U ⊂ Ω0. Niech η : Rn → [0, 1] będzie gładką iT -niezmienniczą funkcją Urysohna dla zbiorów U0, U , t.j. η(x) = 1 dla x ∈ U0 iη(x) = 0 dla x ∈ Rn \ U . Niech h : Ω× [0, 1] → Rn będzie dane wzorem:
h(x, t) =f(x) dla x ∈ Ω \ U,k(x, η(x)t) dla x ∈ Ω0.
Łatwo sprawdzić, że h ∈ HA∞T (Ω) oraz g(x) = h(x, 1) dla x ∈ Ω spełnia warunkilematu.
Zanim sformułujemy kolejny lemat, musimy wprowadzić nowe pojęcie.Niech K ⊂ Rn będzie zbiorem niepustym, zwartym i T -niezmienniczym, a
k ∈ N. (T, k)-prostym pokryciem zbioru K nazywamy rodzinę zbiorów otwartychUik
i=1 spełniających dwa warunki:(1) Ui ∩ TUi = ∅ dla i ∈ 1, 2, . . . , k,(2) K ⊂
⋃ki=1(Ui ∪ TUi).
Mówimy, że K jest (T, k)-prosty, jeżeli posiada (T, k)-proste pokrycie. Przyjmu-jemy, że zbiór ∅ jest (T, 0)-prosty.
Uwaga 2.1. Każdy niepusty, zwarty i T -niezmienniczy podzbiór Rn taki, że Tdziała wolno na K jest (T, k)-prosty dla pewnego k ∈ N.
Dla f ∈ A(Ω) takiego, że f|Ω jest klasy Cr, gdzie r ≥ 1, niech
R(f) = x ∈ f−1(0) : Df(x) ∈ GL(Rn).
Lemat 2.5. Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym takim, że T działawolno na Ω i zbiór Ω jest (T, k)-prosty dla pewnego k ≥ 1. Wówczas jeżeli f ∈A∞T (Ω), to istnieje g ∈ A∞T (Ω) takie, że:
(i) f v g w A∞T (Ω),(ii) zbiór g−1(0) \R(g) jest (T, k − 1)-prosty.
Dowód. Załóżmy, że Uiki=1 jest (T, k)-prostym pokryciem zbioru Ω. Niech
K = Ω \k⋃
i=2
(Ui ∪ TUi), K1 = K ∩ U1.
Zauważmy, że K i K1 są zwarte, K ⊂ (U1 ∪ TU1), czyli K jest (T, 1)-prosty orazK = K1 ∪ TK1. Na mocy tw. Sarda istnieje wartość regularna y0 odwzorowaniaf|Ω∩U1 taka, że |y0| < inf|f(x)| : x ∈ ∂Ω. Ponieważ f T = T f , więc Df(Tx) =T Df(x)T dla każdego x ∈ Ω. Wobec tego Ty0 jest wartością regularną f|Ω∩TU1 .Co więcej, |Ty0| = |y0|. Niech η : Rn → [0, 1] będzie funkcją gładką taką, że η(x) = 1dla x ∈ K1 oraz η(x) = 0 dla x ∈ Rn \ U1. Niech g : Ω → Rn będzie dane wzorem:
g(x) =
f(x)− η(x)y0 dla x ∈ U1 ∩ Ω,f(x)− η(Tx)Ty0 dla x ∈ TU1 ∩ Ω,f(x) dla x ∈ Ω \ (U1 ∪ TU1),
Z konstrukcji odwzorowania g wynika, że g|Ω jest gładkie. Niech h(x, t) = f(x) +t(g(x) − f(x)) dla wszystkich (x, t) ∈ Ω × [0, 1]. Ponieważ |g(x) − f(x)| < |y0| dlax ∈ Ω, więc h jest homotopią łączącą f z g w HA∞T (Ω).
Weźmy x ∈ Ω. Jeżeli x ∈ U1 ∩ Ω, to g(Tx) = f(Tx) − η(T 2x)Ty0 = Tf(x) −η(x)Ty0 = T (f(x) − η(x)y0) = Tg(x). Jeżeli x ∈ TU1 ∩ Ω, to g(Tx) = f(Tx) −η(Tx)y0 = Tf(x)−η(Tx)y0 = Tf(x)−T 2η(Tx)y0 = T (f(x)−η(Tx)Ty0) = Tg(x).

3. T-NIEZMIENNICZE ODWZOROWANIA NORMALNE 11
Jeżeli natomiast x ∈ Ω \ (U1 ∪ TU1), to g(Tx) = f(Tx) = Tf(x) = Tg(x). Zatemodwzorowanie g jest T -niezmiennicze.
Zauważmy, że g−1(0) \ R(g) jest zwarty i g−1(0) ⊂⋃k
i=2(Ui ∪ TUi) ∪K.Weźmy x ∈ K. Jeżeli x ∈ K1, to g(x) = f(x) − y0. Jeżeli x ∈ TK1, to g(x) =f(x)− Ty0. Stąd K ∩ g−1(0) ⊂ R(g), a więc g−1(0) \R(g) ⊂
⋃ki=2(Ui ∪ TUi)
jest (T, k − 1)-prosty.
Lemat 2.6. Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym takim, że T działawolno na Ω. Załóżmy, że f ∈ A∞T (Ω) i zbiór f−1(0) \R(f) jest (T, k)-prosty dlapewnego k ≥ 1. Wówczas istnieje odwzorowanie g ∈ A∞T (Ω) takie, że:
(i) f v g w A∞T (Ω),(ii) zbiór g−1(0) \R(g) jest (T, k − 1)-prosty.
Dowód. Ponieważ f−1(0) \ R(f) jest (T, k)-prosty, więc istnieje zbiór ot-warty i T -niezmienniczy Ω0 ⊂ Ω taki, że:
(a) f−1(0) \R(f) ⊂ Ω0,(b) R(f) ⊂ Ω \ Ω0,(c) Ω0 jest (T, k)-prosty.
Niech f0 = f|Ω0 . Wówczas z (a), (b) wynika, że f0 ∈ A∞T (Ω0). Na mocy lematu 2.5istnieje odwzorowanie g0 ∈ A∞T (Ω0) takie, że f0 v g0 w A∞T (Ω0) oraz g−1
0 (0) \R(g0) jest (T, k− 1)-prosty. Natomiast z lematu 2.4 wynika, że istnieje g ∈ A∞T (Ω)takie, że f v g w A∞T (Ω) oraz g−1(0)\R(g) = g−1
0 (0)\R(g0). Zatem g−1(0)\R(g) jest (T, k − 1)-prosty.
Metoda indukcji matematycznej, lemat 2.6 i lemat 2.2 prowadzą do następującegotwierdzenia.
Twierdzenie 2.1. Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym takim, żeT działa wolno na Ω. Jeżeli f ∈ AT (Ω), to istnieje odwzorowanie generyczneg ∈ A∞T (Ω) takie, że f ∼ g w AT (Ω).
Wniosek 2.2. Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym takim, że Tdziała wolno na Ω. Jeżeli f ∈ AT (Ω), to deg(f,Ω) ∈ 2Z.
Dowód. Niech f ∈ AT (Ω). Na mocy twierdzenia 2.1 istnieje odwzorowaniegeneryczne g ∈ A∞T (Ω) takie, że f ∼ g w AT (Ω). Zatem deg(f,Ω) = deg(g,Ω).Ponieważ T g = g T , więc Dg(x) = T Dg(Tx) T dla każdego x ∈ Ω. Stąd
g−1(0) ∩ Ω = x1, x2, . . . , xm ∪ Tx1, Tx2, . . . , Txmoraz sign detDg(xi) = sign detDg(Txi) dla i = 1, 2, . . . ,m. W rezultacie,
deg(g,Ω) =m∑
i=1
sign detDg(xi) +m∑
i=1
sign detDg(Txi) = 2m∑
i=1
sign detDg(xi),
co kończy dowód.
3. T-niezmiennicze odwzorowania normalne
Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym. Przyjmijmy, że
Ω(ε) = (u, v) ∈ Ω: |v| < ε,gdzie ε > 0.
Definicja 2.5. Niech f = (f1, f2) ∈ AT (Ω), gdzie f1 : Ω → Rp, a f2 : Ω → Rq.(1) Mówimy, że odwzorowanie f jest ε-normalne, jeżeli istnieje ε > 0 takie,
że spełniony jest warunek
(u, v) ∈ Ω(ε) ⇒ f2(u, v) = v.

12 2. STOPIEŃ T -NIEZMIENNICZYCH ODWZOROWAŃ W Rn
(2) Mówimy, że odwzorowanie f jest normalne, jeżeli istnieje ε > 0 takie, żef jest ε-normalne.
Zbiór wszystkich odwzorowań normalnych z Ω w Rn oznaczamy symbolemNAT (Ω).
Definicja 2.6. Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym.(1) Homotopia h ∈ HAT (Ω) jest nazywana homotopią normalną, jeżeli ist-
nieje ε > 0 takie, że dla każdego t ∈ [0, 1] odwzorowanie ht : Ω → Rn jestε-normalne.
(2) Odwzorowanie f jest homotopijne z odwzorowaniem g w NAT (Ω), cozapisujemy f ≈ g w NAT (Ω), jeżeli istnieje homotopia normalna łączącaf z g.
Zbiór wszystkich homotopii normalnych z Ω × [0, 1] w Rn oznaczamy symbolemHNAT (Ω). Klasę homotopii odwzorowania f ∈ NAT (Ω) względem relacji ≈ oz-naczamy symbolem [[f ]], natomiast zbiór wszystkich takich klas homotopii sym-bolem NAT [Ω].
Konstrukcja stopnia dla odwzorowań należących do zbioru AT (Ω) jest opartana następującym twierdzeniu.
Twierdzenie 2.2. Odwzorowanie τ : NAT [Ω] → AT [Ω], [[f ]] → [f ] jest bi-jekcją.
Dowód. (i) Wykażemy, że τ jest surjekcją. Weźmy f = (f1, f2) ∈ AT (Ω).Musimy pokazać, że istnieje g ∈ NAT (Ω) takie, że f ∼ g w AT (Ω). Niechd = inf|f(x)| : x ∈ ∂Ω. Ponieważ f jest T -niezmiennicze, więc f2(u, 0) = 0 dlakażdego (u, 0) ∈ Ω. Wybierzmy 0 < ε ≤ d
3 takie, że jeśli |v| < 2ε, to |f2(u, v)| < d3 .
Niech η : R → [0, 1] będzie taką funkcją gładką, że η(t) = 1 dla |t| ≤ ε i η(t) = 0dla |t| ≥ 2ε. Niech h = (h1, h2) : Ω× [0, 1] → Rn będzie dane wzorem
h(u, v, t) = (f1(u, v), (1− tη(|v|))f2(u, v) + tη(|v|)v) .Wówczas
h1(T (u, v), t) = h1(u,−v, t) = f1(u,−v) = f1(u, v) = h1(u, v, t),
h2(T (u, v), t) = h2(u,−v, t) = (1− tη(|v|))f2(u,−v)− tη(|v|)v= −(1− tη(|v|))f2(u, v)− tη(|v|)v = −h2(u, v, t),
a więc h(T (u, v), t) = Th(u, v, t) dla (u, v) ∈ Ω i t ∈ [0, 1]. Zauważmy, że h jestΩ-dopuszczalne. Weźmy (u, v) ∈ ∂Ω i t ∈ [0, 1]. Jeżeli |v| ≥ 2ε, to h(u, v, t) =f(u, v) 6= 0. Jeżeli |v| < 2ε, to
|h(u, v, t)| = |f(u, v)− tη(|v|)(0, f2(u, v)− v)|≥ |f(u, v)| − tη(|v|)|f2(u, v)− v|≥ |f(u, v)| − |f2(u, v)− v|≥ |f(u, v)| − (|f2(u, v)|+ |v|)
> d− 3d
3= 0.
Zatem h ∈ HAT (Ω). Co więcej, g(u, v) = h(u, v, 1) jest normalne, ponieważ jeśli|v| ≤ ε, to g(u, v) = (f1(u, v), v).
(ii) Wykażemy, że τ jest iniekcją. Weźmy f = (f1, f2) ∈ NAT (Ω) i g =(g1, g2) ∈ NAT (Ω) takie, że f ∼ g w AT (Ω). Musimy pokazać, że f ≈ g wNAT (Ω). Niech h = (h1, h2) ∈ AT (Ω) będzie homotopią łączącą f z g w AT (Ω),a d = inf|h(x, t)| : x ∈ ∂Ω ∧ t ∈ [0, 1]. Ponieważ h jest T -niezmiennicze, więch2(u, 0, t) = 0 dla (u, 0) ∈ Ω i t ∈ [0, 1]. Wybierzmy 0 < ε ≤ d
3 takie, że jeśli|v| < 2ε, to |h2(u, v, t)| < d
3 oraz f2(u, v) = g2(u, v) = v. Niech η : R → [0, 1] będzie

4. STOPIEŃ T -NIEZMIENNICZY 13
taką funkcją gładką, że η(t) = 1 dla |t| ≤ ε i η(t) = 0 dla |t| ≥ 2ε. Wówczash : Ω× [0, 1] → Rn dane wzorem
h(u, v, t) = (h1(u, v, t), (1− η(|v|))h2(u, v, t) + η(|v|)v)
jest homotopią normalną łączącą f z g.
4. Stopień T -niezmienniczy
W tym podrozdziale podamy definicję i własności stopnia T -niezmienniczychodwzorowań w Rn, nazywanego dalej stopniem T -niezmienniczym. Najpierw zdefini-ujemy ten stopień dla odwzorowań normalnych, a następnie dla wszystkich odw-zorowań T -dopuszczalnych.
Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym i f = (f1, f2) ∈ NAT (Ω),gdzie f1 : Ω → Rp, f2 : Ω → Rq. Niech Ω0 = Ω∩Rp. Gdy Ω0 6= ∅, definiujemy odw-zorowanie g0 : Ω0 → Rp wzorem g0(u) = f1(u, 0). Ponieważ f ∈ A(Ω) i f2(u, 0) = 0dla każdego (u, 0) ∈ Ω, więc g0 ∈ A(Ω0). Przyjmijmy, że
d0 =
deg(g0,Ω0), gdy Ω0 6= ∅,0, gdy Ω0 = ∅.
Z założenia, że f jest normalne wynika, że istnieje ε > 0 takie, że f(x) 6= 0 dlakażdego x ∈ ∂Ω(ε). Wobec tego formuła
g1(x) = f(x) dla x ∈ Ω1,
gdzie Ω1 = Ω \ Ω(ε), określa odwzorowanie g1 ∈ AT (Ω1). Zauważmy, że T dzi-ała wolno na Ω1. Na mocy wniosku 2.2 istnieje liczba całkowita d1 taka, żedeg(g1,Ω1) = 2d1. Stopień T -niezmienniczy odwzorowania normalnego f na zbiorzeΩ definiujemy następująco:
degT (f,Ω) = (d0, d1) ∈ Z⊕ Z.
Oznaczmy przez N rodzinę wszystkich takich par (f,Ω), że f ∈ NAT (Ω) i Ω ⊂ Rn
jest zbiorem T -dopuszczalnym.
Twierdzenie 2.3. Odwzorowanie degT : N → Z ⊕ Z, które parze (f,Ω) ∈ Nprzyporządkowuje degT (f,Ω) ∈ Z⊕ Z ma następujące własności:
(1) (homotopijna niezmienniczość) Jeżeli h ∈ HNAT (Ω), to degT (ht,Ω) =degT (h0,Ω) dla każdego t ∈ (0, 1].
(2) (wł. wycinania) Jeżeli Ω0 ⊂ Ω jest T -niezmienniczy oraz f−1(0) ∩Ω ⊂Ω0, to degT (f,Ω) = degT (f|Ω0 ,Ω0).
(3) (addytywność) Jeżeli Ω1, Ω2 są rązłącznymi, otwartymi i T -niez mien-niczymi podzbiorami zbioru Ω takimi, że f−1(0) ∩ Ω ⊂ Ω1 ∪ Ω2, todegT (f,Ω) = degT (f|Ω1 ,Ω1) + degT (f|Ω2 ,Ω2).
(4) (wł. istnienia) Jeżeli degT (f,Ω) 6= 0, to istnieje punkt x ∈ Ω taki, żef(x) = 0.
Odwzorowanie degT : N → Z ⊕ Z nazywamy stopniem T -niezmienniczym odw-zorowań normalnych. Powyższe własności stopnia T -niezmienniczego wynikają zjego definicji i z odpowiednich własności stopnia Brouwera (patrz wł. 1.2–1.5).Zauważmy, że zależność między stopniem Brouwera i stopniem T -niezmienniczymodwzorowania f ∈ NAT (Ω) jest następująca:
deg(f,Ω) = d0 + 2d1 i d0 = deg(f,Ω(ε)).
Niech E oznacza rodzinę wszystkich takich par (f,Ω), że f ∈ AT (Ω) i Ωjest zbiorem T -dopuszczalnym. W oparciu o twierdzenie 2.2 możemy stopień T -niezmienniczy rozszerzyć na rodzinę E . Niech zatem f ∈ AT (Ω). Weźmy g ∈

14 2. STOPIEŃ T -NIEZMIENNICZYCH ODWZOROWAŃ W Rn
NAT (Ω) takie, że [g] = [f ]. Przyjmijmy, że
DegT (f,Ω) = degT (g,Ω).
Z twierdzenia 2.2 wynika, że powyższa formuła nie zależy od wyboru g.
Definicja 2.7. Odwzorowanie DegT : E → Z ⊕ Z, które parze (f,Ω) ∈ Eprzyporządkowuje DegT (f,Ω) ∈ Z⊕ Z nazywamy stopniem T -niezmienniczym.
Poniższe twierdzenie jest naturalną konsekwencją definicji 2.7 i twierdzenia 2.3.
Twierdzenie 2.4. Stopień T -niezmienniczy ma następujące własności:(1) (homotopijna niezmienniczość) Jeżeli h ∈ HAT (Ω), to DegT (ht,Ω) =
DegT (h0,Ω) dla każdego t ∈ (0, 1].(2) (wł. wycinania) Jeżeli Ω0 ⊂ Ω jest T -niezmienniczy oraz f−1(0) ∩Ω ⊂
Ω0, to DegT (f,Ω) = DegT (f|Ω0 ,Ω0).(3) (addytywność) Jeżeli Ω1, Ω2 są rązłącznymi, otwartymi i T -niez mien-
niczymi podzbiorami zbioru Ω takimi, że f−1(0) ∩ Ω ⊂ Ω1 ∪ Ω2, toDegT (f,Ω) = DegT (f|Ω1 ,Ω1) + DegT (f|Ω2 ,Ω2).
(4) (wł. istnienia) Jeżeli DegT (f,Ω) 6= 0, to istnieje punkt x ∈ Ω taki, żef(x) = 0.
Zadanie 1. Udowodnić lemat 2.3.Zadanie 2. Niech U ⊂ Rn będzie zbiorem otwartym i ograniczonym, a g : U → Rn
odwzorowaniem klasy C1. Pokazać, że g−1(0) \R(g) jest zbiorem zwartym.Zadanie 3. Niech Ω ⊂ Rn będzie zbiorem T -dopuszczalnym takim, że T działawolno na Ω, a K ⊂ Ω zbiorem (T, k)-prostym. Pokazać, że istnieje zbiór otwarty iT -niezmienniczy Ω0 ⊂ Ω taki, że K ⊂ Ω0 i Ω0 jest (T, k)-prosty.

ROZDZIAŁ 3
Podstawy topologii niezmienniczej i teoriireprezentacji
W tym rozdziale zamieszczamy wszystkie ważne definicje i fakty z topologiiniezmienniczej oraz teorii reprezentacji, które są niezbędne do określenia stopnianiezmienniczego. Pisząc ten rozdział, korzystaliśmy głównie z następujących prac[Gęba97], [Serr88] i [Trau00].
Definicja 3.1. Zbiór G jest grupą Liego, jeżeli spełnia następujące warunki:• G jest grupą,• G jest gładką rozmaitością,• odwzorowanie G×G 3 (g, h) → gh−1 ∈ G jest gładkie.
Od teraz zakładamy, że G jest zwartą grupą Liego. Ważne i znane ze względuna zastosowania są następujące przykłady zwartych grup Liego:
• grupy skończone, w szczególności Zk grupa reszt z dzielenia przez liczbęnaturalną k, z dodawaniem modulo k oraz Dk grupa izometrii k-kątaforemnego ze składaniem izometrii (izomorficzna z sumą prawie rozłącznąZk ]k Z2),
• O(n) grupa ortogonalnych odwzorowań przestrzeni Rn, t.j. liniowych odw-zorowań przestrzeni Rn, które zachowują iloczyn skalarny, ze składaniemodwzorowań,
• SO(n) grupa złożona z tych ortogonalnych odwzorowań przestrzeni Rn,których macierze mają wyznacznik równy 1, ze składaniem odwzorowań,
• S1 := eiϕ : 0 ≤ ϕ < 2π z dodawaniem liczb zespolonych, izomorficzna zSO(2).
Niech H i K będą podgrupami grupy G. Mówimy, że H jest sprzężone z K i za-pisujemyH s∼ K, gdy istnieje taki element g ∈ G, żeH = g−1Kg. Łatwo sprawdzić,że s∼ jest relacją równoważności. Dla dowolnej podgrupy H grupy G, symbolem (H)będziemy oznaczać klasę abstrakcji H względem relacji s∼. Natomiast symbolemΨ(G) będziemy oznaczać zbiór klas abstrakcji wszystkich domkniętych podgrupgrupy G względem tej relacji. W zbiorze Ψ(G) wprowadzamy częściowy porządek.s. Mianowicie, jeżeli H i K są domkniętymi podgrupami grupy G, to (H) .s (K),gdy istnieje g ∈ G takie, że H ⊂ g−1Kg. Gdy grupa G jest abelowa, klasy ab-strakcji relacji s∼ są jednoelementowe. Wówczas Ψ(G) można utożsamić ze zbioremwszystkich domkniętych podgrup grupy G, a relację .s z inkluzją.
1. Działania
Definicja 3.2. Niech X będzie przestrzenią topologiczną. Odwzorowanieciągłe µ : G×X → X spełniające następujące warunki:
• µ(g, µ(h, x)) = µ(gh, x) dla dowolnych g, h ∈ G oraz x ∈ X,• µ(e, x) = x dla każdego x ∈ X i elementu neutralnego e ∈ G
nazywamy działaniem grupy G na przestrzeni X. Parę (X,µ) nazywamy G-przes-trzenią.
15

16 3. PODSTAWY TOPOLOGII NIEZMIENNICZEJ I TEORII REPREZENTACJI
Gdy działanie µ : G×X → X jest ustalone, to czasami zamiast pisać (X,µ) piszemysamo X, a zamiast µ(g, x) piszemy gx.
Przykład 3.1. Niech X będzie dowolną przestrzenią topologiczną. Odw-zorowanie µ : G × X → X dane wzorem µ(g, x) := x jest działaniem grupy Gna przestrzeni X. Nazywamy je działaniem trywialnym.
Przykład 3.2. Niech µ : Z2 × R2 → R2 będzie określone następująco
µ(0, (x1, x2)) = (x1, x2), µ(1, (x1, x2)) = (x1,−x2)
dla (x1, x2) ∈ R2. Odwzorowanie µ jest działaniem Z2 na R2.
Przykład 3.3. Niech Aϕ : R2 → R2 będzie obrotem płaszczyzny o kąt 0 ≤ϕ < 2π. Wówczas µ : S1 × R2 → R2 dane wzorem µ(eiϕ, x) = Aϕx jest działaniemS1 na R2.
Przykład 3.4. Niech ∆ ⊂ R2×0 będzie trójkątem równobocznym, któregodwusieczne przecinają się w punkcie (0, 0, 0) ∈ R3, a jeden z wierzchołków leżyna prostej R × (0, 0). Niech D3 będzie grupą izometrii płaskich tego trójkąta.Definiujemy µ : D3 × R3 → R3 nastepująco µ(A, (x1, x2, x3)) = (A(x1, x2), x3),gdy A ∈ D3 jest obrotem trójkąta wokół punktu (0, 0, 0), µ(A, (x1, x2, x3)) =(A(x1, x2),−x3), gdyA ∈ D3 jest symetrią trójkąta względem jednej z jego dwusiecznych.Odwzorowanie to jest działaniem D3 na R3.
Niech X będzie G-przestrzenią i niech Gc(X) będzie grupą wszystkich ciągłychbijekcji X na siebie. Dla każdego g ∈ G odwzorowanie Fg : X → X określonewzorem Fg(x) := gx jest elementem grupy Gc(X). Co więcej, odwzorowanie G 3g 7→ Fg ∈ Gc(X) jest homomorfizmem, t.j.
Fgh = Fg Fh
dla g, h ∈ G. Mówimy, że działanie G na X jest liniowe, jeżeli dla każdego g ∈ Godwzorowanie Fg jest liniowe.
Definicja 3.3. Niech X będzie G-przestrzenią. Zbiór Z ⊂ X nazywamyzbiorem G-niezmienniczym (G-zbiorem), jeżeli dla każdego x ∈ Z i g ∈ G mamygx ∈ Z.
Przykład 3.5. Niech µ : Z2 × R2 → R2 będzie działaniem z przykładu 3.2.Wówczas wszystkie podzbiory płaszczyzny symetryczne względem prostej x2 = 0są Z2-zbiorami. W szczególności,
• (x1, x2) ∈ R2 : (x1 − a)2 + x22 < R, gdzie a ∈ R, R > 0,
• (x1, x2) ∈ R2 : r < (x1 − a)2 + x22 < R, gdzie a ∈ R, 0 < r < R,
• (x1, x2) ∈ R2 : − a ≤ x1 − c ≤ a, −b ≤ x2 ≤ b, gdzie a, b > 0, c ∈ Rsą Z2-zbiorami.
Przykład 3.6. Niech µ : S1 × R2 → R2 będzie działaniem z przykładu 3.3.Wówczas ∅, (0, 0), R2 oraz koła i pierścienie o środku w punkcie (0, 0) są jedynymispójnymi S1-zbiorami.
Przykład 3.7. Niech µ : D3 × R3 → R3 będzie działaniem z przykładu 3.4.Wtedy dla każdego h > 0 zbiór ∆× [−h, h] jest D3-niezmienniczy.
Definicja 3.4. Załóżmy, że X i Y są G-przestrzeniami.(1) Odwzorowanie f : X → Y nazywamy odwzorowaniem G-niezmienniczym
(G-odwzorowaniem), jeżeli dla każdego x ∈ X i g ∈ G zachodzi równośćf(gx) = gf(x).

1. DZIA“ANIA 17
(2) Odwzorowanie h : X × [0, 1] → Y nazywamy G-niezmienniczą homotopią(G-homotopią), jeżeli jest ciągłe i dla każdego t ∈ [0, 1] odwzorowanieht : X → Y jest G-niezmiennicze.
(3) Funkcję f : X → R nazywamy funkcją G-niezmienniczą (G-funkcją), jeżelidla każdego x ∈ X i g ∈ G mamy f(gx) = f(x).
Przykład 3.8. Załóżmy, że f1, f2 : R2 → R. Niech f = (f1, f2) i niech µ : Z2×R2 → R2 będzie działaniem z przykładu 3.2. Odwzorowanie f jest Z2-niezmienniczewtedy i tylko wtedy, gdy f1 jest parzyste ze względu na drugą zmienną oraz f2 jestnieparzyste ze względu na drugą zmienną. Istotnie, jeśli (x1, x2) ∈ R2, to
µ(1, f(x1, x2)) = f(µ(1, (x1, x2))) ⇔(f1(x1, x2),−f2(x1, x2)) = (f1(x1,−x2), f2(x1,−x2)) ⇔f1(x1, x2) = f1(x1,−x2) ∧ f2(x1, x2) = −f2(x1,−x2).
Przykład 3.9. Niech X i Y będą G-przestrzeniami i niech f1, f2 : X → Ybędą G- odwzorowaniami. Jeżeli działanie G na Y jest liniowe, to odwzorowanie
h(x, t) = tf1(x) + (1− t)f2(x),
gdzie x ∈ X i t ∈ [0, 1], jest G-homotopią.
Przykład 3.10. Załóżmy, że S1 działa na R2 jak w przykładzie 3.3. Funkcjaf : R2 → R jest S1-niezmiennicza wtedy i tylko wtedy, gdy dla każdego (x1, x2) ∈R2 zachodzi równość f(x1, x2) = f(
√x2
1 + x22, 0). Rzeczywiście. Weźmy bowiem
(x1, x2) ∈ R2 i niech (r, α) ∈ [0,+∞) × [0, 2π) będą współrzędnymi biegunowymitego punktu. Wówczas, jeżeli f jest G-funkcją, to dla każdego ϕ ∈ [0, 2π) mamyf(x1, x2) = f Aϕ(x1, x2) = f(r cos(α + ϕ), r sin(α + ϕ)). W szczególności, gdyϕ = 2π − α, to f(x1, x2) = f(r, 0) = f(
√x2
1 + x22, 0). Implikacja przeciwna do
udowodnionej jest oczywista.
Załóżmy, że X jest G-przestrzenią. Dla każdego punktu x ∈ X zbiór
Gx := g ∈ G : gx = x
jest domkniętą podgrupą grupy G. Nazywa się go grupą izotropii punktu x lubstabilizatorem punktu x. Natomiast zbiór
Gx := gx : g ∈ G
nazywamy orbitą punktu x ∈ X.
Przykład 3.11. Załóżmy, że Z2 działa na R2 jak w przykładzie 3.2. Weźmyx = (x1, x2) ∈ R2. Jeżeli x2 = 0, to (Z2)x = Z2 i Z2x = x. Jeżeli natomiastx2 6= 0, to (Z2)x = 0 i Z2x = (x1, x2), (x1,−x2).
Przykład 3.12. Załóżmy, że S1 działa na R2 jak w przykładzie 3.3. Niechx = (x1, x2) ∈ R2. Jeżeli x = (0, 0), to S1
x = S1 i S1x = x. Jeżeli x 6= (0, 0), toS1
x = 1 i S1x = ∂B((0, 0), |x|).
Stabilizatory punktów należących do tej samej orbity są sprzężone:
Ggx = gGxg−1.
Jeżeli Gx = x (Gx = G), to punkt x nazywamy punktem stałym działania grupyG. Mówimy, że dwie orbity Gx i Gy są tego samego typu orbitowego, jeżeli istniejeG-niezmienniczy homomorfizm φ : Gx→ Gy.
Fakt 3.1. Dwie orbity Gx i Gy są tego samego typu orbitowego wtedy i tylkowtedy, gdy Gx
s∼ Gy.

18 3. PODSTAWY TOPOLOGII NIEZMIENNICZEJ I TEORII REPREZENTACJI
Powyższy fakt tłumaczy dlaczego zbiór Ψ(G) nazywamy czasami zbiorem typóworbitowych.
W dalszym ciągu zakładamy, że H ⊂ G jest podgrupą domkniętą. Wówczasdla Y ⊂ X możemy zdefiniować następujące zbiory:
• Y H := x ∈ Y : H ⊂ Gx,• YH := x ∈ Y : H = Gx,• Y(H) := x ∈ Y : (H) = (Gx).
Oczywiście, jeżeli G jest abelowa, to YH = Y(H).
Przykład 3.13. Powróćmy do przykładu 3.12. Niech H = 1. Wtedy H jestdomkniętą podgrupą S1. Mamy (R2)H = R2 \ (0, 0) oraz (R2)H = R2.
Fakt 3.2. Y(H) jest G-zbiorem.
Fakt 3.3. Jeżeli G jest abelowa, to YH i Y H są G-zbiorami.
Fakt 3.4. Jeżeli Y jest zbiorem domkniętym, to Y H , YH oraz Y(H) są zbioramidomkniętymi.
Mówimy, że H jest maksymalnym typem orbitowym w Y , jeżeli (H) jest el-ementem maksymalnym w zbiorze (Gx) : x ∈ Y względem relacji .s. Jeżeli Hjest maksymalnym typem orbitowym w Y , to Y H = YH .
W grupie G wprowadzamy relację H∼. Mówimy, że element g1 ∈ G jest wrelacji z elementem g2 ∈ G, co zapisujemy g1
H∼ g2, jeżeli istnieje h ∈ H takie, żeg1 = g2h
−1. Łatwo sprawdzić, że jest to relacja równoważności. Klasę abstrakcjielementu g ∈ G względem tej relacji oznaczamy symbolem [g].
Fakt 3.5. Przestrzeń ilorazowa G/H jest G-przestrzenią. Działanie G na G/H
jest określone następująco µ(g, [g1]) = [gg1].
Fakt 3.6. Orbita Gx jest dyffeomorficzna z przestrzenią ilorazową G/Gx.
2. Reprezentacje
Niech X będzie rzeczywistą przestrzenią unormowaną i niech GL(X) będziegrupą izomorfizmów przestrzeni X na siebie. Wiadomo, że GL(X) jest otwartympodzbiorem przestrzeni L(X) wszystkich odwzorowań liniowych i ciągłych z X wsiebie, z normą ‖A‖ := sup‖x‖≤1 ‖Ax‖. Niech % : G → GL(X) będzie ciągłymhomomorfizmem. Parę V = (X, %) nazywamy reprezentacją grupy G w przestrzeniX. Mówimy, że X jest przestrzenią reprezentacji V (lub po prostu, mniej ściśle, żeX jest reprezentacją grupy G), a dimX jest wymiarem reprezentacji V .
Przykład 3.14. Niech X będzie rzeczywistą przestrzenią unormowaną. Odw-zorowanie σ : G → GL(X) dane wzorem σ(g) = IdX , g ∈ G, jest ciągłym homo-morfizmem. Parę (X,σ) nazywamy reprezentacją trywialną grupy G w przestrzeniX.
Przykład 3.15. Niech G będzie podgrupą grupy GL(Rn), a % : G→ GL(Rn)będzie dane wzorem %(g) := g dla g ∈ G. Parę (Rn, %) nazywamy reprezentacjądefiniującą G w Rn.
Przykład 3.16. Załóżmy, że G jest grupą skończoną rzędu p. Niech X będzierzeczywistą przestrzenią liniową wymiaru p o bazie xg1 , xg2 , . . . , xgp indeksowanejelementami g1, g2, . . . , gp grupy G. Niech %(g) : X → X dla g ∈ G będzie takimprzekształceniem liniowym, że %(g)xgj
= xggjdla j = 1, 2, . . . , p. W ten sposób
otrzymujemy reprezentację (X, %), którą nazywamy reprezentacją regularną. Wymiartej reprezentacji jest równy p.

2. REPREZENTACJE 19
Przykład 3.17. Niech Sx2 : R2 → R2 będzie symetrią względem prostej x2 =0, t.j. Sx2(x1, x2) = (x1,−x2). Niech % : Z2 → GL(R2) będzie określone następu-jąco %(0) = IdR2 , %(1) = Sx2 . Wtedy (R2, %) jest reprezentacją grupy Z2 w R2.
Nietrudno zauważyć, że jeśli V = (X, %) jest reprezentacją grupy G w przestrzeniX, to odwzorowanie µ% : G×X → X dane wzorem
µ%(g, x) := %(g)x
jest działaniem grupy G na przestrzeni X. Zatem (X,µ%) jest G-przestrzenią.
Definicja 3.5. Niech V1 = (X1, %1) i V2 = (X2, %2) będą reprezentacjamigrupy G w przestrzeniach X1 i X2. Mówimy, że reprezentacje te są izomorficznelub równoważne, jeżeli istnieje izomorfizm T : X1 → X2, który spełnia warunek
T %1(g) = %2(g) T
dla każdego g ∈ G.
W szczególności, reprezentacje izomorficzne mają ten sam wymiar.
Przykład 3.18. Załóżmy, że G jest grupą skończoną rzędu p, a X rzeczywistąprzestrzenią liniową wymiaru p o bazie xg1 , xg2 , . . . , xgp indeksowanej elemen-tami g1, g2, . . . , gp grupy G. Niech (X, %) będzie reprezentacją regularną grupyG (patrz przykład 3.16) i niech (X, %) będzie reprezentacją grupy G taką, że dlapewnego x0 ∈ X elementy postaci %(g)x0, g ∈ G, tworzą bazę przestrzeni X. Wów-czas reprezentacja (X, %) jest izomorficzna z reprezentacją regularną. IzomorfizmT : X → X określamy przyjmując Txgj = %(gj)x0 dla j = 1, 2, . . . , p. Wtedy dlakażdego g ∈ G zachodzi równość T %(g) = %(g) T .
Definicja 3.6. Niech V1 = (X1, %1) i V2 = (X2, %2) będą reprezentacjamigrupy G w przestrzeniach X1 i X2. Reprezentację grupy G w przestrzeni X1 ⊕X2
postaci V = (X1 ⊕X2, %1 ⊕ %2), gdzie (%1 ⊕ %2)(g)(x1 ⊕ x2) := %1(g)x1 ⊕ %2(g)x2
dla wszystkich g ∈ G, x1 ∈ X1 i x2 ∈ X2, nazywamy sumą prostą reprezentacji V1
i V2. Zapisujemy V = V1 ⊕ V2.
Przykład 3.19. Niech V1 = (R2, %) będzie reprezentacją grupy Z2 w przestrzeniR2 z przykładu 3.17, a V2 = (R, σ) trywialną reprezentacją Z2 w R. WówczasV1 ⊕ V2 jest reprezentacją Z2 w R3. Co więcej, (%⊕ σ)(0)(x1, x2, x3) = (x1, x2, x3),a (%⊕ σ)(1)(x1, x2, x3) = (x1,−x2, x3) dla każdego (x1, x2, x3) ∈ R3.
Niech V = (X, %) będzie reprezentacją grupy G w przestrzeni X i niech X0
będzie podprzestrzenią liniową przestrzeni X. Załóżmy, że podprzestrzeń X0 jestG-niezmiennicza, czyli %(g)x ∈ X0 dla wszystkich x ∈ X0 i g ∈ G. Obcięcie %(g)|X0
izomorfizmu %(g) do podprzestrzeni X0 jest więc izomorfizmem przestrzeni X0 nasiebie i oczywiście %(gh)|X0 = %(g)|X0 %(h)|X0 . Wobec tego odwzorowanie %0 : G→GL(X0), g → %(g)|X0 jest homomorfizmem, a W = (X0, %0) jest reprezentacjągrupy G w przestrzeni X0. Mówimy, że W jest podreprezentacją reprezentacji V .
Przykład 3.20. Niech V = (R2, %) będzie reprezentacją grupy Z2 z przykładu3.17. Wówczas X0 = (x1, 0) ∈ R2 : x1 ∈ R jest podprzestrzenią Z2-niezmiennicząw R2. Co więcej, %(g)|X0 = IdX0 dla g ∈ Z2. Zatem trywialna reprezentacja grupyZ2 w X0 jest podreprezentacją reprezentacji V .
Przykład 3.21. Niech V = (X, %) będzie reprezentacją grupy G w przestrzeniX. Załóżmy, że G jest abelowa oraz H ⊂ G jest podgrupą domkniętą. Wów-czas XH jest G-niezmienniczą podprzestrzenią, a %H : G→ GL(XH) dane wzorem%H(g) = %(g)|XH dla g ∈ G jest homomorfizmem. Zatem para V H = (XH , %H) jestpodreprezentacją reprezentacji V .

20 3. PODSTAWY TOPOLOGII NIEZMIENNICZEJ I TEORII REPREZENTACJI
Definicja 3.7. Mówimy, że reprezentacja V = (X, %) grupy G w przestrzeniX jest nieprzywiedlna lub prosta, jeżeli 0 i X są jedynymi G-niezmienniczymipodprzestrzeniami przestrzeni X.
Przykład 3.22. Dla każdego k ∈ N niech Zk := A ∈ SO(2) : Ak = IdR2.Wiadomo, że elementami grupy SO(2) są obroty na płaszczyźnie wokół punktu(0, 0). Zk jest grupą rzędu k generowaną przez obrót o kąt 2π
k . Oczywiście Zk ' Zk.Niech %k : Zk → SO(2) dane będzie wzorem %k(A) = A dla A ∈ Zk. Para (R2, %k)jest nieprzywiedlną reprezentacją grupy Zk w przestrzeni R2. Jednocześnie jest toreprezentacja definiująca grupy Zk w R2 (porównaj przykład 3.15).
Definicja 3.8. Mówimy, że reprezentacja V = (X, %) grupy G w przestrzeni Xjest rozkładalna, jeżeli istnieją dwie nietrywialne podprzestrzenie G-niezmienniczeX1 i X2 przestrzeni X takie, że X = X1 ⊕X2.
Wtedy Vi = (Xi, %i), gdzie %i : G → GL(Xi) jest dane wzorem %i(g) = %(g)|Xi, są
takimi podreprezentacjami reprezentacji V , że V = V1 ⊕ V2.
Przykład 3.23. Wróćmy do przykładu 3.20. Niech X⊥0 = (0, x2) ∈ R2 : x2 ∈
R. Oczywiście X⊥0 jest Z2-niezmienniczą podprzestrzenią w R2. Ponieważ R2 =
X0 ⊕X⊥0 , więc rozważana reprezentacja grupy Z2 w R2 jest rozkładalna.
Twierdzenie 3.1. Niech V = (X, %) będzie reprezentacją grupy G w skończe-nie wymiarowej przestrzeni X i niech X1 będzie G-niezmienniczą podprzestrzeniąprzestrzeni X. Wówczas istnieje G-niezmiennicza podprzestrzeń X2 przestrzeni Xtaka, że X = X1 ⊕X2.
Wniosek 3.1. Każda skończenie wymiarowa reprezentacja zwartej grupy Liegojest sumą prostą reprezentacji nieprzywiedlnych.
Twierdzenie 3.2. Jeżeli V jest skończenie wymiarową reprezentacją grupy Gw przestrzeni X, to istnieją podreprezentacje V1, V2, . . . , Vk takie, że
• V =⊕k
i=1 Vi,• Vi =
⊕ri
j=1 Vij dla każdego 1 ≤ i ≤ k,• wszystkie reprezentacje Vij są nieprzywiedlne,• reprezentacje Vij i Vij′ są izomorficzne dla 1 ≤ i ≤ k, 1 ≤ j, j′ ≤ ri,• reprezentacje Vij i Vi′j′ nie są izomorficzne dla i 6= i′, 1 ≤ i, i′ ≤ k,
1 ≤ j ≤ ri, 1 ≤ j′ ≤ ri′ .
Rozkład reprezentacji V na sumę prostą reprezentacji V1, V2, . . . , Vk, o którychmowa w powyższym twierdzeniu, nazywamy rozkładem kanonicznym.
Definicja 3.9. Załóżmy, że (X, 〈·, ·〉) jest rzeczywistą przestrzenią unitarną.Mówimy, że reprezentacja V = (X, %) grupy G w przestrzeni X jest unitarna, jeżelidla każdego g ∈ G izomorfizm %(g) : X → X jest odwzorowaniem unitarnym, t.j.〈%(g)x, %(g)y〉 = 〈x, y〉 dla x, y ∈ X. W szczególności, gdy X = Rn i %(g) ∈ O(n)dla g ∈ G, to mówimy, że reprezentacja V = (Rn, %) jest ortogonalna.
Przykład 3.24. Niech m ∈ N ∪ 0. Homomorfizm ρm : SO(2) → SO(2) ⊂O(2) definiujemy wzorem
(8) ρm(Aϕ) := Amϕ.
Przypomnijmy, że każdy obrót na płaszczyźnie można przedstawić w postaci macierzy
Aϕ =[cosϕ − sinϕsinϕ cosϕ
],
gdzie ϕ ∈ [0, 2π). Zatem wzór (8) można zapisać w postaci
(9) ρm
([cosϕ − sinϕsinϕ cosϕ
])=[cosmϕ − sinmϕsinmϕ cosmϕ
].

2. REPREZENTACJE 21
Para (R2, ρm) jest reprezentacją grupy SO(2) w przestrzeni R2. Będziemy oznaczaćją symbolem R[m].
Dla k,m ∈ N ∪ 0 przyjmijmy, że
R[k,m] := R[m]⊕R[m]⊕ . . .⊕R[m]︸ ︷︷ ︸k egzemplarzy
.
Twierdzenie 3.3. Niech V = (Rn, %) będzie reprezentacją grupy SO(2) wprzestrzeni Rn. Wówczas istnieje r ∈ N oraz istnieją ciągi skończone kir
i=0 imir
i=0 takie, że(1) m1,m2, . . . ,mr ∈ N;(2) m1 < m2 < . . . < mr;(3) k1, k2, . . . , kr ∈ N;(4) k0 ∈ N ∪ 0;(5) V ' R[k0, 0]⊕
⊕ri=1R[ki,mi].
Twierdzenie 3.4. Każda skończenie wymiarowa reprezentacja zwartej grupyLiego jest izomorficzna z reprezentacją unitarną.
Twierdzenie 3.5. Załóżmy, że V = (X, %) jest unitarną reprezentacją grupyG w przestrzeni X, a W = (X0, %0) jest podreprezentacją reprezentacji V . NiechX⊥
0 := y ∈ X : ∀x∈X0 〈y, x〉 = 0 i niech %⊥0 (g) := %(g)|X⊥0. Wówczas W⊥ =
(X⊥0 , %
⊥0 ) też jest podreprezentacją reprezentacji V oraz V = W ⊕W⊥.
ZadaniaZadanie 1. Pokazać, że relacja s∼ jest relacją równoważności.Zadanie 2. Pokazać, że relacja .s jest relacją częściowego porządku.Zadanie 3. Niech X będzie G-przestrzenią. Pokazać, że dla każdego x ∈ X stabi-lizator Gx jest podgrupą domkniętą grupy G.Zadanie 4. Pokazać, że jeśli X jest G-przestrzenią, to dla każdego x ∈ X i g ∈ Gzachodzi równość Ggx = gGxg
−1.Zadanie 5. Udowodnić fakty 3.2-3.4.Zadanie 6. Pokazać, że relacja H∼ jest relacją równoważności.Zadanie 7. Podać przykład działania Z2 na R2 inny od przykładu 3.2.


ROZDZIAŁ 4
Stopień G-niezmienniczy
W niniejszym rozdziale prezentujemy w zarysie teorię stopnia G-niezmienni-czych odwzorowań w Rn, gdy grupa G jest skończona i abelowa. Teoria ta stanowiuogólnienie opisanej w rozdziale 2 teorii stopnia T -niezmienniczych odwzorowań wRn. Załóżmy, że V = (Rn, %) jest reprezentacją ortogonalną grupy G. Wówczas% : G → O(n) jest ciągłym homomorfizmem, który indukuje działanie µ% grupy Gna przestrzeni Rn:
µ%(g, x) = %(g)x, g ∈ G, x ∈ Rn.
Zatem Rn jest G-przestrzenią. W dalszym ciągu tego rozdziału zamiast pisać Rn zdziałaniem indukowanym przez % będziemy pisać V . Każdy otwarty, ograniczony iG-niezmienniczy podzbiór w V nazywać będziemy G-dopuszczalnym.
Niech Ω ⊂ V będzie zbiorem G-dopuszczalnym. Zauważmy, że wówczas Ωjest zbiorem G-niezmienniczym. Mówimy, że odwzorowanie f : Ω → V jest G-dopuszczalne lub że para (f,Ω) jest G-dopuszczalna, jeżeli f ∈ A(Ω) i f jestG-niezmiennicze. Zbiór wszystkich G-dopuszczalnych odwzorowań z Ω w V oz-naczać będziemy symbolem AG(Ω). Przez analogię wprowadzamy G-dopuszczalnehomotopie. Mówimy, że homotopia h : Ω × [0, 1] → V jest G-dopuszczalna, jeżelih ∈ HA(Ω) i h jest G-niezmiennicza. Zbiór wszystkich G-dopuszczalnych homo-topii z Ω× [0, 1] w V oznaczać będziemy symbolem HAG(Ω).
Definicja 4.1. Odwzorowanie f0 jest homotopijne z odwzorowaniem f1 wAG(Ω), co zapisujemy f0 ∼ f w AG(Ω), jeśli istnieje homotopia h ∈ HAG(Ω)łącząca f0 z f .
Oczywiście homotopijność jest relacją równoważności w AG(Ω).Zbiór klas sprzężoności Ψ(G) grupy G jest skończony i można go utożsamić
ze zbiorem jej podgrup. Przyjmijmy, że Ψ(G) = H1,H2, . . . ,Hr, gdzie Hi ⊂ Goraz Hi 6= Hj , gdy i 6= j. Załóżmy, że jeśli Hi ( Hj , to i > j. Niech A(G)będzie grupą abelową wolną generowaną przez Ψ(G). Elementami tej grupy sąsumy postaci n1H1 + n2H2 + . . . + nrHr, gdzie ni ∈ Z. Dwa elementy
∑ri=1 niHi
i∑r
i=1 kiHi są równe, jeżeli ni = ki dla każdego i ∈ 1, 2, . . . , r. Dodawanie : A(G)×A(G) → A(G) jest określone następująco:
r∑i=1
niHi r∑
i=1
kiHi =r∑
i=1
(ni + ki)Hi.
Elementem neutralnym dodawania jest Θ :=∑r
i=1 0 · Hi. Element∑r
i=1(−ni)Hi
jest przeciwny do elementu∑r
i=1 niHi, t.j.r∑
i=1
niHi r∑
i=1
(−ni)Hi = Θ.
Nietrudno zauważyć, że grupa A(G) jest izomorficzna z grupą⊕r
i=1 Z.Oznaczmy przez AG zbiór wszystkich par G-dopuszczalnych (f,Ω).
Twierdzenie 4.1. Istnieje odwzorowanie DegG : AG → A(G) o następującychwłasnościach:
23

24 4. STOPIEŃ G-NIEZMIENNICZY
1. Wł. istnienia: Jeżeli DegG(f,Ω) 6= Θ, to istnieje x ∈ Ω takie, że f(x) = 0.2. Addytywność: Jeżeli f ∈ AG(Ω) oraz Ω1, Ω2 są rozłącznymi, otwartymi
i G-niezmienniczymi podzbiorami zbioru Ω takimi, że f−1(0) ∩ Ω ⊂Ω1 ∪ Ω2, to DegG(f,Ω) = DegG(f|Ω1 ,Ω1) DegG(f|Ω2 ,Ω2).
3. Homotopijna niezmienniczość: Jeżeli f0 ∼ f w AG(Ω), to DegG(f0,Ω) =DegG(f,Ω).
4. Wł. wycinania: Jeżeli f ∈ AG(Ω), Ω0 ⊂ Ω jest otwartym i G-niezmienni-czym podzbiorem zbioru Ω i 0 /∈ f(Ω \Ω0), to DegG(f,Ω) = DegG(f,Ω0).
Odwzorowanie DegG : AG → A(G), o którym mowa w powyższym twierdzeniu,nazywamy stopniem G-niezmienniczym lub G-stopniem. Poniżej naszkicujemy jegokonstrukcję.
1. G-stopień odwzorowania generycznego.Zera jednego typu orbitowego
Niech Ω ⊂ V będzie zbiorem G-dopuszczalnym. Odwzorowanie f ∈ AG(Ω)nazywamy odwzorowaniem generycznym, jeżeli spełnia dwa następujące warunki:
(Z0.) f|Ω jest odwzorowaniem klasy C1,(Z1.) 0 jest wartością regularną odwzorowania f|Ω.
Załóżmy, że f ∈ AG(Ω) jest odwzorowaniem generycznym. Niech Z = f−1(0)∩Ω.Zbiór Z jest skończony i G-niezmienniczy. Wobec tego istnieją punkty x0, x1, . . . , xk
w zbiorze Ω takie, że Z =⋃k
i=0Gxi oraz Gxi ∩ Gxj = ∅, gdy i 6= j. NiechH = Gx0 . Podgrupa H zadaje rozkład przestrzeni V na sumę prostą V H ⊕ (V H)⊥.Przyjmijmy, że p = dimV H , a q = dim(V H)⊥. Niech α1, α2, . . . , αp będziebazą przestrzeni V H , a β1, β2, . . . , βq bazą przestrzeni (V H)⊥. Wówczas B =α1, α2, . . . , αp, β1, β2, . . . , βq jest bazą przestrzeni V . Ponieważ Df(x0)(V H) =V H , co łatwo sprawdzić, więc macierz A odwzorowania Df(x0) : V → V ma wbazie B postać:
A =[A11 A12
O A22
],
gdzie A11 ∈ M(p × p), a A22 ∈ M(q × q). Rozważmy najpierw sytuację, gdyodwzorowanie f spełnia jeszcze dodatkowo dwa warunki:
(Z2.) Z = Gx0,(Z3.) A22 = I,
gdzie I jest macierzą jednostkową. Przy założeniach (Z0) − (Z3), G-stopień odw-zorowania f definiujemy następująco:
DegG(f,Ω) := (sign detA11) ·H.
Przykład 4.1. Niech V = (R3, %) będzie reprezentacją grupy Z2 w przestrzeniR3 określoną następująco: %(0)(x1, x2, x3) = (x1, x2, x3), %(1)(x1, x2, x3) = (x1,−x2, x3),gdzie xi ∈ R. Niech Ω = (−a, a)×(−b, b)×(−c, c), gdzie a, b, c > 0. Niech f = IdR3 .Wówczas mamy Z = (0, 0, 0), (Z2)(0,0,0) = Z2, V Z2 = (x1, 0, x3) : x1, x3 ∈ R i(V Z2)⊥ = (0, x2, 0) : x2 ∈ R. Zatem
Df(0, 0, 0) =
1 0 00 1 00 0 1
i DegZ2
(f,Ω) = 1 · Z2.
Przyjmijmy teraz założenie ogólniejsze od (Z2)–(Z3), że(Z4.) Gxi = H dla każdego i = 0, 1, . . . , k.

2. G-STOPIEŃ. ZERA RÓżNYCH TYPÓW ORBITOWYCH. 25
Niech
sign xi =
1, gdy Df(xi) zachowuje orientację przestrzeni,−1, gdy Df(xi) zmienia orientację przestrzeni.
Przy założeniach (Z0), (Z1) i (Z4), G-stopień odwzorowania f określa wzór:
DegG(f,Ω) :=
(k∑
i=0
sign xi
)·H.
Przykład 4.2. Niech G będzie dowolną grupą abelową skończoną. Załóżmy,że V jest reprezentacją trywialną grupy G w przestrzeni R3. Wtedy typ or-bitowy każdego punktu z V jest równy G. Niech f : V → V będzie dane wzoremf(x1, x2, x3) = (x2
1 − 1, x22 − 1, x3), gdzie xi ∈ R. Weźmy taki zbiór otwarty
i ograniczony Ω ⊂ V , że (±1,±1, 0) ∈ Ω oraz (±1,∓1, 0) ∈ V \ Ω. WówczasZ = (1, 1, 0), (−1,−1, 0) i DegG(f,Ω) = 2 ·G.
2. G-stopień. Zera różnych typów orbitowych.
2.1. Odwzorowania H-normalne. Załóżmy, że H ⊂ G. Dla x ∈ V piszemyx = (u, v), gdzie u ∈ V H , a v ∈ (V H)⊥. Analogicznie, dla f : V → V piszemyf = (f1, f2), gdzie f1 : V → V H , a f2 : V → (V H)⊥. Niech Ω ⊂ V będzie zbioremG-dopuszczalnym. Jeżeli f ∈ AG(Ω), to f(V H) ⊂ V H , a stąd f2(u, 0) = 0. Niech
Ω(H, ε) := (u, v) ∈ Ω: |v| < ε,gdzie ε > 0. Z ortogonalności reprezentacji V wynika, że jeśli (u, v) ∈ Ω(H, ε), todla każdego g ∈ G również g(u, v) ∈ Ω(H, ε). Zatem Ω(H, ε) jest zbiorem G-niez-mienniczym.
Definicja 4.2. Mówimy, że odwzorowanie f ∈ AG(Ω) jest H-normalne, jeżeliistnieje ε > 0 takie, że jeśli (u, v) ∈ Ω(H, ε), to f(u, v) = (f1(u, 0), v).
Zbiór wszystkich odwzorowańH-normalnych z Ω w V oznaczać będziemy symbolemNAG(Ω,H).
Twierdzenie 4.2. Dla każdego odwzorowania f ∈ AG(Ω) istnieje odwzorowanief ∈ NAG(Ω,H) takie, że f ∼ f w AG(Ω).
Dowód. Niech f ∈ AG(Ω) i d = inf|f(x)| : x ∈ ∂Ω. Z ciągłości f wynika,że istnieje 0 < δ < d
6 takie, że dla wszystkich x, y ∈ Ω jeśli |x − y| < δ, to|fi(x)− fi(y)| < d
6 dla i = 1, 2. Niech η : R → [0, 1] będzie funkcją gładką taką, żeη(t) = 1, gdy |t| ≤ δ
2 oraz η(t) = 0, gdy |t| ≥ δ. Niech h : Ω × [0, 1] → V będziedane wzorem
h(u, v, t) := (1− tη(|v|))f(u, v) + tη(|v|)(f1(u, 0), v).
Wówczas h(u, v, 0) = f(u, v) dla (u, v) ∈ Ω i h(u, v, 1) = (f1(u, 0), v) dla (u, v) ∈Ω(H, δ
2 ). Przyjmijmy, że f(u, v) := h(u, v, 1). Do zakończenia dowodu wystarczypokazać, że h ∈ HAG(Ω). Weźmy (u, v) ∈ Ω i t ∈ [0, 1]. Jeżeli |v| ≥ δ, toh(u, v, t) = f(u, v). Jeżeli |v| < δ, to
|h(u, v, t)− f(u, v)| = |tη(|v|)(f1(u, 0), v)− tη(|v|)f(u, v)| ≤
|f1(u, 0)− f1(u, v)|+ |v − f2(u, v)| <d
6+ |v|+ |f2(u, v)− f2(u, 0)| < d
2.
Stąd h(u, v, t) 6= 0 dla (u, v) ∈ ∂Ω i t ∈ [0, 1]. Co więcej,
h(g(u, v), t) = h(gu, gv, t) = (1− tη(|gv|))f(g(u, v)) + tη(|gv|)(f1(gu, 0), gv)= (1− tη(|v|))gf(u, v) + tη(|v|)g(f1(u, 0), v) = gh(u, v, t)
dla (u, v) ∈ Ω, t ∈ [0, 1] i g ∈ G, co kończy dowód.

26 4. STOPIEŃ G-NIEZMIENNICZY
2.2. Konstrukcja G-stopnia. Weźmy f ∈ AG(Ω). Niech Ψ(G) ∩ Gx : x ∈Ω = H1,H2, . . . ,Hp, Hi 6= Hj dla i 6= j. Bez straty ogólności możemy za-łożyć, że jeśli Hi ( Hj , to i > j. Na mocy twierdzenia 4.2 istnieje odwzorowaniefH1 ∈ NAG(Ω,H1) takie, że f ∼ fH1 w AG(Ω). Niech Ω1 := Ω \ Ω(H1, ε1) inH1 := deg(fH1 ,Ω(H1, ε1)), gdzie ε1 > 0 z warunku H1-normalności dla fH1 . Wzbiorze Ω1 nie ma już punktów o typie orbitowym H1. Na mocy twierdzenia 4.2istnieje odwzorowanie fH2 ∈ NAG(Ω1,H2) takie, że fH1
|Ω1∼ fH2 w AG(Ω1). Niech
Ω2 := Ω1 \ Ω1(H2, ε2) i nH2 := deg(fH2 ,Ω1(H2, ε2)), gdzie ε2 > 0 z warunku H2-normalności dla fH2 . W zbiorze Ω2 nie ma już punktów o typach orbitowych H1
i H2. Indukcyjnie, dla i = 3, 4, . . . , p w zbiorze Ωi−1 nie ma już punktów o typachorbitowych H1, . . . ,Hi−1. Na mocy twierdzenia 4.2 istnieje odwzorowanie fHi ∈NAG(Ωi−1,Hi) takie, że fHi−1
|Ωi−1∼ fHi w AG(Ωi−1). Niech Ωi := Ωi−1\Ωi−1(Hi, εi)
i nHi := deg(fHi ,Ωi−1(Hi, εi)), gdzie εi > 0 z warunku Hi-normalności dla fHi .W zbiorze Ωi nie ma już punktów o typach orbitowych H1,H2, . . . ,Hi. G-stopieńodwzorowania f na zbiorze Ω definiujemy następująco:
DegG(f,Ω) :=p∑
i=1
nHiHi.
Powyższa definicja nie zależy od wyboru odwzorowań fHi , co wynika z homotopijnejniezmienniczości stopnia Brouwera.
Przykład 4.3. Niech Zk = A ∈ SO(2) : Ak = IdR2, k ∈ N. Weźmy grupęZ6 = Z2⊕Z3. Niech J : Z6 → Z2 i K : Z6 → Z2 będą homomorfizmami określonyminastępująco: J (IdR2) = J (A120) = J (A240) = IdR2 , J (A60) = J (A180) =J (A300) = A180 , K(IdR2) = K(A180) = IdR2 , K(A60) = K(A240) = A120 ,K(A120) = K(A300) = A240 . Niech V0 będzie trywialną reprezentacją grupy Z6
w R1, V1 = (R2,J ), a V2 = (R2,K). Rozpatrzmy reprezentację V = V0 ⊕ V1 ⊕ V2.Wówczas V Z6 = V0, V Z2 = V0⊕ V2, a V Z3 = V0⊕ V1. Niech Ω ⊂ V będzie zbioremZ6-dopuszczalnym i f ∈ AZ6(Ω). Ponieważ f(V0) ⊂ V0, więc
nZ6 = deg(fZ6 ,Ω(Z6, ε1)) = deg(f |V0 ,Ω ∩ V0),
gdzie fZ6 jest odwzorowaniem Z6-normalnym homotopijnym z f w AZ6(Ω) i ε1 zwarunku Z6-normalności dla fZ6 . Niech Ω1 = Ω\Ω(Z6, ε1). Ponieważ f(V0⊕V1) ⊂V0 ⊕ V1, więc
nZ3 = deg(fZ3 ,Ω1(Z3, ε2)) = deg(f |V0⊕V1 ,Ω1 ∩ (V0 ⊕ V1)),
gdzie fZ3 jest odwzorowaniem Z3-normalnym homotopijnym z fZ6 w AZ6(Ω1) iε2 z warunku Z3-normalności dla fZ3 . Niech Ω2 = Ω1 \ Ω1(Z3, ε2). Ponieważf(V0 ⊕ V2) ⊂ V0 ⊕ V2, więc
nZ2 = deg(fZ2 ,Ω2(Z2, ε3)) = deg(f |V0⊕V2 ,Ω2 ∩ (V0 ⊕ V2)),
gdzie fZ2 jest odwzorowaniem Z2-normalnym homotopijnym z fZ3 w AZ6(Ω2) i ε3z warunku Z2-normalności dla fZ2 . Niech Ω3 = Ω2 \ Ω2(Z2, ε3). Otrzymujemy
nZ1 = deg(f,Ω3),
a w konsekwencji
DegZ6(f,Ω) = nZ6Z6 + nZ3Z3 + nZ2Z2 + nZ1Z1.
Jeżeli zatem f = Id : V → V , to DegZ6(Id,Ω) = 1 · Z6 + 0 · Z3 + 0 · Z2 + 0 · Z1, gdy
0 ∈ Ω oraz DegZ6(Id,Ω) = 0 · Z6 + 0 · Z3 + 0 · Z2 + 0 · Z1, gdy 0 /∈ Ω.

2. G-STOPIEŃ. ZERA RÓżNYCH TYPÓW ORBITOWYCH. 27
ZadaniaZadanie 1. Niech f ∈ AG(Ω) będzie odwzorowaniem generycznym. Wykaż, żef−1(0) ∩ Ω jest sumą skończonej ilości orbit.Zadanie 2. Niech f ∈ AG(Ω) będzie odwzorowaniem generycznym. Załóżmy, żex0 ∈ Ω i f(x0) = 0. Wykaż, że jeśli H = Gx0 , to Df(x0)(V H) = V H .Zadanie 3. Niech H ⊂ G i Ω ⊂ V będzie G-zbiorem. Pokaż, że Ω(H, ε) jestG-zbiorem.


ROZDZIAŁ 5
Stopień SO(2)-niezmienniczych odwzorowańgradientowych
W tym rozdziale zapoznajemy Czytelnika z teorią stopnia SO(2)-niezmienni-czych odwzorowań gradientowych. Stanowi ona szczególny przypadek teorii stopniaG-niezmienniczych odwzorowań gradientowych dla dowolnej zwartej grupy LiegoG. Wybraliśmy grupę SO(2) ze względu na liczne zastosowania SO(2)-stopnia wukładach równań Hamiltonowskich. W trakcie całego rozdziału zakładamy, że:
• V jest ortogonalną reprezentacją grupy SO(2) w przestrzeni Rn,• SO(2) działa na Rn × [0, 1] następująco: g(x, t) = (gx, t) dla g ∈ SO(2) i
(x, t) ∈ Rn × [0, 1].Oczywiście działanie SO(2) na Rn jest indukowane przez V . W dalszym ciąguzamiast pisać Rn z działaniem SO(2) indukowanym przez V będziemy pisać V .
Mówimy, że f : V → V jest ∇SO(2)-odwzorowaniem, jeżeli istnieje funkcjaϕ : V → R klasy C1 i SO(2)-niezmiennicza taka, że f = ∇ϕ. Naturalnie każde∇SO(2)-odwzorowanie jest SO(2)-niezmiennicze. Mówimy, że h : V × [0, 1] → Vjest ∇SO(2)-homotopią, jeżeli istnieje funkcja χ : V × [0, 1] → R klasy C1 i SO(2)-niezmiennicza taka, że ht = ∇χt dla t ∈ [0, 1], gdzie ht(x) = h(x, t), χt(x) = χ(x, t)dla x ∈ V . Każdy ograniczony, otwarty i SO(2)-niezmienniczy podzbiór V nazywaćbędziemy SO(2)-dopuszczalnym.
Niech Ω ⊂ V będzie zbiorem SO(2)-dopuszczalnym, a f : V → V będzie∇SO(2)-odwzorowaniem. Mówimy, że odwzorowanie f jest ∇SO(2)-dopuszczalnena Ω lub że para (f,Ω) jest ∇SO(2)-dopuszczalna, jeżeli f(x) 6= 0 dla każdegox ∈ ∂Ω. Zbiór wszystkich odwzorowań ∇SO(2)-dopuszczalnych na Ω oznaczaćbędziemy symbolem A∇SO(2)(Ω).
Niech h : V × [0, 1] → V będzie ∇SO(2)-homotopią. Mówimy, że homotopia hjest ∇SO(2)-dopuszczalna na Ω, jeżeli h(x, t) 6= 0 dla x ∈ ∂Ω i t ∈ [0, 1]. Zbiórwszystkich homotopii ∇SO(2)-dopuszczalnych na Ω oznaczać będziemy symbolemHA∇SO(2)(Ω).
Definicja 5.1. Odwzorowanie f0 : V → V jest homotopijne z odwzorowaniemf1 : V → V w A∇SO(2)(Ω), co zapisujemy f0 ∼ f1 w A∇SO(2)(Ω), jeżeli istniejehomotopia h ∈ HA∇SO(2)(Ω) łącząca f0 z f1.
Łatwo sprawdzić, że homotopijność jest relacją równoważności w A∇SO(2)(Ω).Ponieważ grupa SO(2) jest abelowa, więc zbiór Ψ(SO(2)) możemy utożsa-
mić ze zbiorem wszystkich jej podgrup domkniętych. Stąd Ψ(SO(2)) = H ⊂SO(2) : H jest podgrupą domkniętą = SO(2),Z1,Z2, . . . ,Zk,Zk+1, . . ., gdzieZk = A ∈ SO(2) : Ak = IdR2 i k ∈ N. Niech
U(SO(2)) = Z⊕⊕k∈N
Z.
W U(SO(2)) wprowadzamy dodawanie ” + ”:
(n0, n1, . . . , nk, . . .) + (m0,m1, . . . ,mk, . . .)= (n0 +m0, n1 +m1 , . . . , nk +mk, . . .)
29

30 5. STOPIEŃ SO(2)-NIEZMIENNICZYCH ODWZOROWAŃ GRADIENTOWYCH
oraz mnożenie ” ∗ ”:
(n0, n1, . . . , nk, . . .) ∗ (m0,m1, . . . ,mk, . . .)= (n0m0, n0m1 + n1m0 , . . . , n0mk + nkm0, . . .).
Oba zdefiniowane powyżej działania są przemienne. Elementem neutralnym do-dawania jest Θ = (0, 0, . . . , 0, . . .), a elementem neutralnym mnożenia jest 1 =(1, 0, . . . , 0, . . .). Elementem przeciwnym do elementu (n0, n1, . . . , nk, . . .) jest ele-ment (−n0,−n1, . . . ,−nk, . . .). Jeżeli n0 = ±1, to wówczas istnieje element odwrotnydo elementu (n0, n1, . . . , nk, . . .) i jest on równy (±1,−n1, . . . ,−nk, . . .). (U(SO(2)),+, ∗)nazywamy pierścieniem tom Dicka grupy SO(2). Zauważmy, że grupa (U(SO(2)),+)jest analogonem grupy (A(G),) zdefiniowanej w rozdziale 4 dla skończonej grupyabelowej G.
Niech A∇SO(2) oznacza zbiór wszystkich par ∇SO(2)-dopuszczalnych (f,Ω).
Twierdzenie 5.1. Istnieje odwzorowanie DegSO(2) : A∇SO(2) → U(SO(2)),które ma następujące własności:
1. Wł. istnienia: Jeżeli DegSO(2)(f,Ω) 6= Θ, to istnieje punkt x ∈ Ω taki, żef(x) = 0.
2. Addytywność: Jeżeli f ∈ A∇SO(2)(Ω) oraz Ω1, Ω2 są rozłącznymi, otwartymi iSO(2)-niezmienniczymi podzbiorami zbioru Ω takimi, że f−1(0) ∩ Ω ⊂ Ω1 ∪Ω2, to DegSO(2)(f,Ω) = DegSO(2)(f |Ω1 ,Ω1) + DegSO(2)(f |Ω2 ,Ω2).
3. Homotopijna niezmienniczość: Jeżeli f0 ∼ f1 w A∇SO(2)(Ω), to zachodzi równośćDegSO(2)(f0,Ω) = DegSO(2)(f1,Ω).
4. Wł. wycinania: Jeżeli f ∈ A∇SO(2)(Ω), Ω0 ⊂ Ω jest otwartym i SO(2)-niez-mienniczym podzbiorem zbioru Ω oraz 0 /∈ f(Ω \ Ω0), to DegSO(2)(f,Ω) =DegSO(2)(f,Ω0).
Odwzorowanie DegSO(2) : A∇SO(2) → U(SO(2)), o którym mowa w powyższymtwierdzeniu, nazywamy SO(2)-stopniem lub stopniem SO(2)-niezmienniczych od-wzorowań gradientowych.
Twierdzenie 5.2 (Wł. produktowa). Niech Vi dla i = 1, 2 będą skończeniewymiarowymi ortogonalnymi reprezentacjami grupy SO(2). Jeżeli Ωi ⊂ Vi są zbio-rami SO(2)-dopuszczalnymi oraz fi ∈ A∇SO(2)(Ωi), to zachodzi wzór
DegSO(2)((f1, f2),Ω1 × Ω2) = DegSO(2)(f1,Ω1) ∗DegSO(2)(f2,Ω2).
1. H-normalne odwzorowania gradientowe
Niech V będzie ortogonalną reprezentacją grupy SO(2) w przestrzeni Rn, aΩ ⊂ V będzie zbiorem SO(2)-dopuszczalnym.Załóżmy, że H ⊂ SO(2) jest podgrupą domkniętą. Podgrupa H zadaje rozkładreprezentacji V na sumę prostą V = V H ⊕ (V H)⊥. Niech p = dimV H , q =dim(V H)⊥, czyli p+ q = n. W dalszym ciągu będziemy pisać x = (u, v) ∈ V , gdzieu = (u1, . . . , up) ∈ V H , a v = (v1, . . . , vq) ∈ (V H)⊥ oraz f = (f1, f2) : V → V ,gdzie f1 : V → V H , a f2 : V → (V H)⊥. Jeżeli f ∈ A∇SO(2)(Ω), to f(V H) ⊂ V H , astąd f2(u, 0) = 0.
Definicja 5.2. Mówimy, że odwzorowanie f ∈ A∇SO(2)(Ω) jest H-normalne,jeżeli istnieje ε > 0 takie, że jeśli |v| < ε, to f(u, v) = (f1(u, 0), v).
Uwaga 5.1. Ponieważ f = ∇ϕ, więc powyższy warunek jest równoważny zwarunkiem ϕ(u, v) = ϕ(u, 0) + 1
2 |v|2 dla |v| < ε.
Podzbiór wszystkich odwzorowań H-normalnych w A∇SO(2)(Ω) będziemy oznaczaćsymbolem NA∇SO(2)(Ω,H).

1. H-NORMALNE ODWZOROWANIA GRADIENTOWE 31
Twierdzenie 5.3. Dla każdego odwzorowania f ∈ A∇SO(2)(Ω) istnieje odw-zorowanie f ∈ NA∇SO(2)(Ω,H) takie, że f ∼ f w A∇SO(2)(Ω).
Dowód powyższego twierdzenia podzieliliśmy na lematy.
Lemat 5.1. Dla każdego ε > 0 istnieje gładkie odwzorowanie SO(2)-niezmien-nicze eε : V H ⊕ (V H)⊥ → V H ⊕ (V H)⊥ o następujących własnościach:
• jeśli |v| ≤ ε2 , to eε(u, v) = (u, 0);
• jeśli |v| ≥ ε, to eε(u, v) = (u, v);• eε : (u, v) ∈ V : |v| > ε
2 → V \ V H jest dyffeomorfizmem.
Dowód. Weźmy ε > 0. Istnieje funkcja gładka ηε : R → [0, 1] taka, że ηε(s) =0, gdy |s| ≤ ε
2 , ηε(s) = 1, gdy |s| ≥ ε oraz η′ε(s) > 0, gdy ε2 < s < ε. Niech eε
będzie dane wzorem:
eε(u, v) := (u, ηε(|v|)v)
dla (u, v) ∈ V . Ponieważ ηε jest gładkie, więc eε też jest gładkie. Co więcej, łatwosprawdzić, że
Deε(u, v) =[I OO Aε(u, v)
],
gdzie I ∈ M(p × p), a Aε(u, v) ∈ M(q × q) oraz Aε(u, v) = O, gdy |v| ≤ ε2 ,
Aε(u, v) = I, gdy |v| ≥ ε oraz
Aε(u, v) = ηε(|v|)I +η′ε(|v|)|v|
v21 v1v2 . . . v1vq
v2v1 v22 . . . v2vq
......
...vqv1 vqv2 . . . v2
q
,gdy ε
2 < |v| < ε. Dla każdego (u, v) ∈ V i g ∈ SO(2) mamy
eε(g(u, v)) = (gu, ηε(|gv|)gv) = (gu, ηε(|v|)gv) = g(u, ηε(|v|)v) = geε(u, v),
zatem eε jest SO(2)-niezmiennicze. Jeżeli |v| ≤ ε2 , to ηε(|v|) = 0, a stąd eε(u, v) =
(u, 0). Jeśli |v| ≥ ε, to ηε(|v|) = 1, a stąd eε(u, v) = (u, v).Niech Mε = (u, v) ∈ V : ε
2 < |v| < ε, a Nε = (u, v) ∈ V : 0 < |v| < ε.Do zakończenia dowodu wystarczy pokazać, że eε jest dyffeomorfizmem z Mε naNε. Zatem należy udowodnić, że eε : Mε → Nε jest na, 1 − 1 oraz Deε(u, v) dla(u, v) ∈ Mε jest izomorfizmem. Niech (u, v) będzie takie, że |v| = ε. Wówczaseε(u, v) = (u, v) i limα→0 eε(u, αv) = (u, 0), a stąd eε przekształca Mε na Nε.Weźmy (u, v), (w, z) ∈ Mε. Załóżmy, że eε(u, v) = eε(w, z). Wówczas u = w iηε(|v|)v = ηε(|z|)z. Gdyby |v| > |z|, to ηε(|v|) > ηε(|z|), czyli |ηε(|v|)v| > |ηε(|z|)z|.Sprzeczność. Zatem |v| = |z|, stąd ηε(|v|) = ηε(|z|), a w konsekwencji v = z.Załóżmy, że (u, v) ∈Mε. Pokażemy, że kerDeε(u, v) = (0, 0). Mamy
Deε(u, v)(w, z) = (0, 0) ⇔ w = 0 ∧Aε(u, v)z = 0
⇔ w = 0 ∧ ∀1≤i≤q ηε(|v|)zi +η′ε(|v|)vi
|v|
q∑j=1
vjzj = 0
⇔ w = 0 ∧ ∀1≤i≤q zi = − η′ε(|v|)vi
ηε(|v|)|v|
q∑j=1
vjzj .

32 5. STOPIEŃ SO(2)-NIEZMIENNICZYCH ODWZOROWAŃ GRADIENTOWYCH
Niech αi = − η′ε(|v|)vi
ηε(|v|)|v| dla i = 1, . . . , q, a β =∑q
j=1 vjzj . Wówczas zi = αiβ, a wkonsekwencji
Aε(u, v)z = 0 ⇔ ∀1≤i≤q ηε(|v|)αiβ +η′ε(|v|)vi
|v|
q∑j=1
vjαjβ = 0
⇔ ∀1≤i≤q αiβ − αiβ
q∑j=1
vjαj = 0 ⇔ ∀1≤i≤q αiβ + αiβη′ε(|v|)|v|ηε(|v|)
= 0
⇔ ∀1≤i≤q αi = 0 ∨ β = 0 ⇔ z = 0,
co kończy dowód.
Niech ε > 0. Niech ηε : R× [0, 1] → [0, 1] będzie funkcją daną wzorem
ηε(s, t) := tηε(s) + (1− t),
gdzie s ∈ R, t ∈ [0, 1]. Wówczas ηε(s, 0) = 1, a ηε(s, 1) = ηε(s) dla s ∈ R. Niechhε : V × [0, 1] → V będzie dane wzorem
hε(u, v, t) = (u, ηε(|v|, t)v) = (u, tηε(|v|)v + (1− t)v),
gdzie (u, v) ∈ V , t ∈ R. Wtedy hε(u, v, 0) = (u, v), a hε(u, v, 1) = (u, ηε(|v|)v) =eε(u, v). Zauważmy, że jeżeli |v| ≤ ε
2 , to hε(u, v, t) = (u, (1− t)v), a jeżeli |v| ≥ ε, tohε(u, v, t) = (u, v). Co więcej, hε(g(u, v), t) = (gu, ηε(|gv|, t)gv) = (gu, ηε(|v|, t)gv)= g(u, ηε(|v|, t)v) = ghε(u, v, t) dla każdego (u, v) ∈ V , t ∈ [0, 1] i g ∈ SO(2).Zatem hε jest SO(2)-niezmiennicze.
Niech Dhε(·, t) oznacza pochodną odwzorowania hε(·, t).
Lemat 5.2. Dla każdego ε > 0 i każdego t ∈ [0, 1) odwzorowanie Dhε(·, t) : V →V jest izomorfizmem.
Dowód. Weźmy ε > 0 i t ∈ [0, 1). Prosty rachunek pokazuje, że
Dhε(u, v, t) =[I OO Aε(u, v, t)
],
gdzie I ∈M(p×p), a Aε(u, v, t) ∈M(q× q) oraz Aε(u, v, t) = (1− t)I, gdy |v| ≤ ε2 ,
Aε(u, v, t) = I, gdy |v| ≥ ε oraz
Aε(u, v, t) = ηε(|v|, t)I +∂ηε
∂s (|v|, t)|v|
v21 v1v2 . . . v1vq
v2v1 v22 . . . v2vq
......
...vqv1 vqv2 . . . v2
q
,gdy ε
2 < |v| < ε. Zatem Dhε(u, v, t)(w, z) = 0 wtedy i tylko wtedy, gdy w = 0 iAε(u, v, t)z = 0. Jeżeli |v| ≤ ε
2 lub |v| ≥ ε, to kerAε(u, v, t) = ker I = 0. W przy-padku, gdy ε
2 < |v| < ε, rozumowanie analogiczne do tego z dowodu twierdzenia5.1 dla Aε(u, v) pokazuje, że kerAε(u, v, t) = 0. Szczegóły pozostawiamy Czytel-nikowi.
Weźmy f ∈ A∇SO(2)(Ω). Wówczas f = ∇ϕ, gdzie ϕ : V → R jest funkcją klasyC1 i SO(2)-niezmienniczą. Niech Z = f−1(0) ∩ Ω, d1 = inf|f(u, v)| : (u, v) ∈∂Ω, d2 = dist(∂Ω, Z) i d = mind1, d2. Weźmy 0 < ε < d
2 . Przyjmijmy, żeHε : V × [0, 1] → V jest dane wzorem
Hε(u, v, t) := ∇(ϕ hε)(u, v, t),
gdzie (u, v) ∈ V , t ∈ [0, 1]. Wtedy Hε(u, v, 0) = ∇ϕ(u, v) = f(u, v), a Hε(u, v, 1) =∇(ϕ eε)(u, v) dla każdego (u, v) ∈ V .
Lemat 5.3. Przy powyższych założeniach Hε ∈ HA∇SO(2)(Ω).

1. H-NORMALNE ODWZOROWANIA GRADIENTOWE 33
Dowód. Zaczniemy od wykazania, że odwzorowanie Hε nie ma zer w zbiorze∂Ω× [0, 1]. W tym celu zauważmy, że dla (u, v) ∈ V i t ∈ [0, 1] mamy
(10) Hε(u, v, t) = 0 ⇔ f(hε(u, v, t)) ∈ kerDhε(u, v, t)T .
Rzeczywiście,
Hε(u, v, t) = 0 ⇔ ∇(ϕ hε)(u, v, t) = 0 ⇔ ∀1≤i≤p,1≤j≤q∂(ϕ hε)∂ui
(u, v, t) = 0
∧ ∂(ϕ hε)∂vj
(u, v, t) = 0 ⇔ ∀1≤i≤p,1≤j≤q
p∑k=1
∂ϕ
∂uk(hε(u, v, t))
∂(hε)k
∂ui(u, v, t) +
q∑k=1
∂ϕ
∂vk(hε(u, v, t))
∂(hε)k
∂ui(u, v, t) = 0 ∧
p∑k=1
∂ϕ
∂uk(hε(u, v, t))
∂(hε)k
∂vj(u, v, t) +
p∑k=1
∂ϕ
∂vk(hε(u, v, t))
∂(hε)k
∂vj(u, v, t) = 0 ⇔ Dhε(u, v, t)T ∇ϕ(hε(u, v, t))T = O
⇔ ∇ϕ(hε(u, v, t)) ∈ kerDhε(u, v, t)T ⇔ f(hε(u, v, t)) ∈ kerDhε(u, v, t)T
Niech (u, v) ∈ ∂Ω. Jeśli |v| ≥ ε, to Hε(u, v, t) = ∇ϕ(u, v) = f(u, v) 6= 0 dlat ∈ [0, 1].
Jeżeli |v| < ε i t ∈ [0, 1), to z (10) i lematu 5.2 wynika, że Hε(u, v, t) = 0 ⇔f(hε(u, v, t)) = 0. Gdyby Hε(u, v, t) = 0, to f(hε(u, v, t)) = 0, a stąd mielibyśmyd2 ≤ |(u, v) − hε(u, v, t)| = |(u, v) − (u, ηε(|v|, t)v)| = |v − ηε(|v|, t)v| ≤ |v| < ε <d2 ≤
d22 . Sprzeczność.
Jeżeli t = 1 i ε2 < |v| < ε, to Hε(u, v, 1) = 0 ⇔ f(eε(u, v)) = 0. Gdyby
Hε(u, v, 1) = 0, to f(eε(u, v)) = 0, a stąd mielibyśmy d2 ≤ |(u, v) − eε(u, v)| =|(u, v)− (u, ηε(|v|)v)| = |v − ηε(|v|)| ≤ |v| < ε < d2
2 . Sprzeczność.Jeżeli t = 1 i |v| ≤ ε
2 , to Hε(u, v, 1) = 0 ⇔ f(u, 0) = 0. Gdyby Hε(u, v, 1) = 0,to f(u, 0) = 0, czyli d2 ≤ |(u, v)− (u, 0)| = |v| < d2
4 . Sprzeczność.Podsumowując, jeżeli |v| < ε, to Hε(u, v, t) 6= 0 dla t ∈ [0, 1].
Aby wykazać, że Hε jest SO(2)-niezmiennicze, wystarczy udowodnić, że ϕ hε
jest SO(2)-niezmiennicze. Weźmy (u, v) ∈ V , t ∈ [0, 1] i g ∈ SO(2). Ponieważ ϕ i hε
są SO(2)-niezmiennicze, więc (ϕhε)(g(u, v), t) = ϕ(hε(g(u, v), t)) = ϕ(ghε(u, v, t)) =ϕ(hε(u, v, t)) = (ϕ hε)(u, v, t).
Dowód twierdzenia 5.3. Niech νε : R → [0, 1] będzie funkcją gładką taką,że νε(s) = s, gdy s ≤ ε2
32 , νε(s) = 0, gdy s ≥ ε2
8 oraz ν′ε(s) < 0, gdy ε2
32 < s < ε2
8 .Niech ψε : V → R będzie dane wzorem
ψε(u, v) = νε(12|v|2),
gdzie (u, v) ∈ V . Funkcja ψε jest gładka i SO(2)-niezmiennicza, a ∇ψε(u, v) =(0, ν′ε(
12 |v|
2)v). Niech Hε : V × [0, 1] → V będzie określone następująco
Hε(u, v, t) = ∇(ϕ eε)(u, v) + t∇ψε(u, v),
gdzie (u, v) ∈ V , t ∈ [0, 1]. Wówczas Hε jest ciągłe, SO(2)-niezmiennicze orazHε(u, v, 0) = ∇(ϕ eε)(u, v), a Hε(u, v, 1) = ∇(ϕ eε)(u, v) +∇ψε(u, v).
Pokażemy, że Hε nie ma zer w zbiorze ∂Ω×[0, 1]. Weźmy (u, v) ∈ ∂Ω i t ∈ [0, 1].Jeżeli |v| ≥ ε
2 , to ν′ε(12 |v|
2) = 0, a więc Hε(u, v, t) = ∇(ϕ eε)(u, v) 6= 0 na mocylematu 5.3. Załóżmy, że |v| < ε
2 . Wtedy Hε(u, v, t) = ∇ϕ(u, 0) + t(0, ν′ε(12 |v|
2)v) iν′ε(
12 |v|
2) 6= 0. Zatem Hε(u, v, t) = 0 tylko wtedy, gdy ∇ϕ(u, 0) = 0 i v = 0. Gdyby(u, 0) ∈ ∂Ω i Hε(u, 0, t) = 0, to ∇ϕ(u, 0) = 0. Sprzeczność.

34 5. STOPIEŃ SO(2)-NIEZMIENNICZYCH ODWZOROWAŃ GRADIENTOWYCH
Zauważmy, że Hε(·, 1) ∈ NA∇SO(2)(Ω,H). Weźmy (u, v) ∈ V takie, że |v| ≤ ε4 .
Wtedy Hε(u, v, 1) = ∇ϕ(u, 0) + (0, v) = f(u, 0) + (0, v) = (f1(u, 0), v).Podsumowując, ∇(ϕ eε) ∼ Hε(·, 1) i, na mocy lematu 5.3, f ∼ ∇(ϕ eε) w
A∇SO(2)(Ω), a stąd f ∼ Hε(·, 1), co kończy dowód.
2. Konstrukcja SO(2)-stopnia
Załóżmy, że V jest ortogonalną reprezentacją grupy SO(2) w przestrzeni Rn,a Ω ⊂ V jest dowolnym zbiorem SO(2)-dopuszczalnym. Weźmy H ⊂ SO(2).Podgrupa H indukuje rozkład V na sumę prostą V H ⊕ (V H)⊥. Niech
Ω(H, ε) = (u, v) ∈ Ω: u ∈ V H , v ∈ (V H)⊥, |v| < ε,gdzie ε > 0. Ponieważ reprezentacja V jest ortogonalna, więc zbiór Ω(H, ε) jestSO(2)-niezmienniczy.
Niech ΨΩ(SO(2)) = SO(2)x : x ∈ Ω. Na mocy twierdzenia 3.3 istnieją ciągiskończone pir
i=0 i miri=0 takie, że
1. m1,m2, . . . ,mr ∈ N,2. m1 < m2 < . . . < mr,3. p1, p2, . . . , pr ∈ N,4. p0 ∈ N ∪ 0,5. V ' R[p0, 0]⊕
⊕ri=1R[pi,mi].
Stąd ΨΩ(SO(2)) jest zbiorem skończonym. Przyjmijmy, że ΨΩ(SO(2)) ∩ Zk : k ∈N = Zk1 ,Zk2 , . . . ,Zkl
oraz k1 > k2 > . . . > kl.Weźmy f ∈ A∇SO(2)(Ω). Na mocy twierdzenia 5.3 istnieje odwzorowanie
fSO(2) ∈ NA∇SO(2)(Ω, SO(2)) takie, że f ∼ fSO(2) w A∇SO(2)(Ω). Niech Ω0 :=Ω\Ω(SO(2), ε0) i n0 := deg(fSO(2),Ω0), gdzie ε0 > 0 z warunku SO(2)-normalnościdla fSO(2). W zbiorze Ω0 nie ma już punktów o typie orbitowym SO(2). Istniejeodwzorowanie fZk1 ∈ NA∇SO(2)(Ω0,Zk1) takie, że fSO(2)
|Ω0∼ fZk1 w A∇SO(2)(Ω0).
Niech Ω1 := Ω0 \ Ω0(Zk1 , ε1) i nZk1:= deg(fZk1 ,Ω0(Zk1 , ε1)), gdzie ε1 > 0 z
warunku Zk1-normalności dla fZk1 . W zbiorze Ω1 nie ma już punktów o ty-pach orbitowych SO(2) i Zk1 . Istnieje odwzorowanie fZk2 ∈ NA∇SO(2)(Ω1,Zk2)
takie, że fZk1
|Ω1∼ fZk2 w A∇SO(2)(Ω1). Niech Ω2 := Ω1 \ Ω1(Zk2 , ε2) i nZk2
:=
deg(fZk2 ,Ω1(Zk2 , ε2)), gdzie ε2 > 0 z warunku Zk2-normalności dla fZk2 . Wzbiorze Ω2 nie ma już punktów o typach orbitowych SO(2), Zk1 i Zk2 . Induk-cyjnie, dla i = 3, 4, . . . , l w zbiorze Ωi−1 nie ma już punktów o typach orbitowychSO(2),Zk1 , . . . ,Zki−1 . Istnieje odwzorowanie fZki ∈ NA∇SO(2)(Ωi−1,Zki
) takie,
że fZki−1
|Ωi−1∼ fZki w A∇SO(2)(Ωi−1). Wówczas Ωi := Ωi−1 \ Ωi−1(Zki
, εi) i nZki:=
deg(fZki ,Ωi−1(Zki, εi)), gdzie εi > 0 z warunku Zki
-normalności dla fZki .SO(2)-stopień odwzorowania f na zbiorze Ω definiujemy następująco:
DegSO(2)(f,Ω) := n0 SO(2) +∞∑
k=1
nkZk,
gdzie• nk := nZki
, gdy k = ki dla pewnego i = 1, 2, . . . , l,• nk := 0, gdy k 6= ki dla każdego i = 1, 2, . . . , l.
Powyższa definicja nie zależy od wyboru odwzorowań fSO(2), fZk1 , . . . , fZkl , cowynika z homotopijnej niezmienniczości stopnia Brouwera.
Uwaga 5.2. Jeżeli Ω(SO(2), ε0) = Ω, to n0 = deg(f,Ω) oraz nk = 0 dlakażdego k ∈ N. Zatem DegSO(2)(f,Ω) = deg(f,Ω) · SO(2).

2. KONSTRUKCJA SO(2)-STOPNIA 35
ZadaniaZadanie 1. Niech ε > 0. Pokazać, że istnieje funkcja gładka νε : R → [0, 1] taka, żeνε(s) = s, gdy s ≤ ε2
32 , νε(s) = 0, gdy s ≥ ε2
8 oraz ν′ε(s) < 0, gdy ε2
32 < s < ε2
8 .Zadanie 2. Załóżmy, że V jest ortogonalną reprezentacją grupy SO(2) w przestrzeniRn. Niech H ⊂ SO(2) i niech Ω ⊂ V będzie SO(2)-zbiorem. Pokazać, że Ω(H, ε)jest SO(2)-zbiorem.


Bibliografia
[Gęba97] K. Gęba, "Degree for Gradient Equivariant Maps and Equivariant Conley Index", Topo-logical Nonlinear Analysis II. Degree, Singularity and Variations, Birkhäuser 1997, s.247–272.
[Gran03] A. Granas, J. Dugundji, Fixed Point Theory, Springer-Verlag, New York 2003.[Kraw97] W. Krawcewicz, J. Wu, Theory of Degrees with Applications to Bifurcation and Differ-
ential Equations, John Wiley & Sons, Inc. 1997.[Miln69] J.W. Milnor, Topologia z Różniczkowego Punktu Widzenia, PWN 1969.[Serr88] J.P. Serre, Reprezentacje Liniowe Grup Skończonych, PWN 1988.[Trau00] A. Trautman, Grupy oraz Ich Reprezentacje, Warszawa 2000.
37