
Skrypt do zajęć wyrównawczych - Fizyka
113
1 Publikacja wspólfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Spolecznego SKRYPT DO ZAJĘĆ WYRÓWNAWCZYCH Z FIZYKI DLA STUDENTÓW I ROKU AKADEMII MORSKIEJ W SZCZECINIE dr Janusz Chrzanowski PUBLIKACJA DYSTRYBUOWANA BEZPLATNIE
-
Upload
truongthuy -
Category
Documents
-
view
227 -
download
1
Transcript of Skrypt do zajęć wyrównawczych - Fizyka
1
Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
SKRYPT DO ZAJĘĆ WYRÓWNAWCZYCH Z FIZYKI
DLA STUDENTÓW I ROKU AKADEMII MORSKIEJ
W SZCZECINIE
dr Janusz Chrzanowski
PUBLIKACJA DYSTRYBUOWANA BEZPŁATNIE
2
SPIS TREŚCI
1. Podstawy rachunku wektorowego ................................................................................................................... 3
2. Kinematyka punktu materialnego ................................................................................................................... 6
3. Dynamika ruchu postępowego ....................................................................................................................... 13
4. Pęd, zasada zachowania pędu ........................................................................................................................ 23
5. Praca i energia. Zasada zachowania energii mechanicznej ......................................................................... 27
6. Dynamika bryły sztywnej ............................................................................................................................... 34
7. Pole grawitacyjne ............................................................................................................................................ 41
8. Drgania............................................................................................................................................................. 50
9.Fale .................................................................................................................................................................... 56
10. Hydrostatyka i hydrodynamika ................................................................................................................... 65
11.Elementy termodynamiki .............................................................................................................................. 72
12.Pole elektryczne .............................................................................................................................................. 77
13.Pojemność elektryczna- kondensatory ......................................................................................................... 79
14. Prąd elektryczny –obwody prądu stałego ................................................................................................... 82
15.Pole magnetyczne wokół przewodnika z prądem ........................................................................................ 85
16.Wzbudzanie prądów zmiennych, Prawo Faradaya, fale elektromagnetyczne. ......................................... 93
17.Fale elektromagnetyczne ............................................................................................................................... 98
18.Elementy fizyki ciała stałego ....................................................................................................................... 100
19.Elementy fizyki jądrowej ............................................................................................................................. 108
3
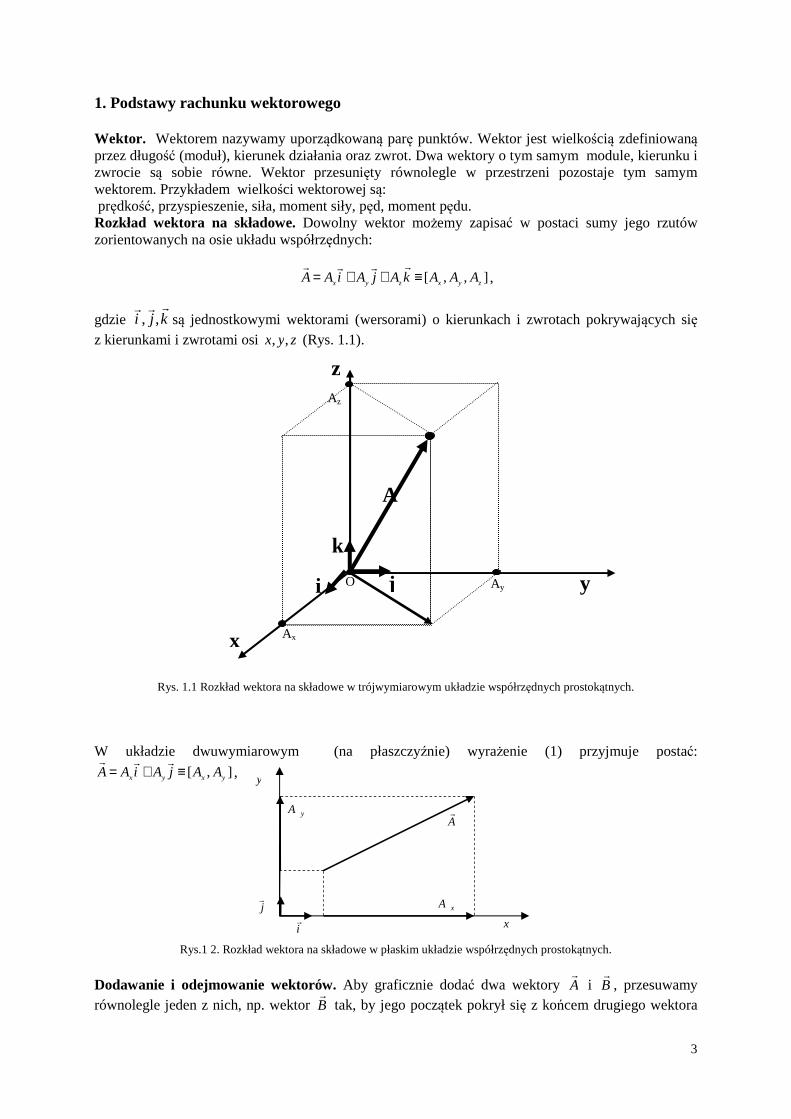
1. Podstawy rachunku wektorowego Wektor. Wektorem nazywamy uporządkowaną parę punktów. Wektor jest wielkością zdefiniowaną przez długość (moduł), kierunek działania oraz zwrot. Dwa wektory o tym samym module, kierunku i zwrocie są sobie równe. Wektor przesunięty równolegle w przestrzeni pozostaje tym samym wektorem. Przykładem wielkości wektorowej są: prędkość, przyspieszenie, siła, moment siły, pęd, moment pędu. Rozkład wektora na składowe. Dowolny wektor możemy zapisać w postaci sumy jego rzutów zorientowanych na osie układu współrzędnych:
],,[ zyxzyx AAAkAjAiAA ≡++=rrrr
,
gdzie kjirrr
,, są jednostkowymi wektorami (wersorami) o kierunkach i zwrotach pokrywających się z kierunkami i zwrotami osi zyx ,, (Rys. 1.1).
Rys. 1.1 Rozkład wektora na składowe w trójwymiarowym układzie współrzędnych prostokątnych. W układzie dwuwymiarowym (na płaszczyźnie) wyrażenie (1) przyjmuje postać:
],[ yxyx AAjAiAA ≡+=rrr
,
Rys.1 2. Rozkład wektora na składowe w płaskim układzie współrzędnych prostokątnych. Dodawanie i odejmowanie wektorów. Aby graficznie dodać dwa wektory A
r i B
r, przesuwamy
równolegle jeden z nich, np. wektor Br
tak, by jego początek pokrył się z końcem drugiego wektora
x
y
z
i j
k
A
O
Ax
Ay
Az
Ar
xA
yA
x
y
ir
jr

( Ar
). Sumę wektorów Ar
i Br
tworzy wektor łwektora B
r. Procedurę tą moż
równoległego przemieszczania jest dowolna. Aby graficznie odjprocedurę graficznego dodawania zastzorientowanym (Rys.3.).
Rys.1.3 Wektory rozłożone na składowe dodajemy lub odejmujemy dodajskładowe:
Iloczyn skalarny dwóch wektorów. określony przez wyrażenie:
gdzie
są długościami wektorów A
r i B
można również obliczyć sumując iloczyny odpowiednich składowych wektorów
Ar
Br
tworzy wektor łączący początek wektora Ar
z koń możemy stosować do większej liczby wektorów, a kolejno
równoległego przemieszczania jest dowolna. Aby graficznie odjąć dwa wektory mo graficznego dodawania zastępując wektor odejmowany wektorem przeciwnie do niego
1.3. Graficzne dodawanie i odejmowanie wektorów.
one na składowe dodajemy lub odejmujemy dodając lub odejmuj
],,[ zzyyxx BABABABA ±±±=±rv
.
Iloczyn skalarny dwóch wektorów. Iloczynem skalarnym wektorów Ar
i B
ϕcosBABArrvr
=⋅ ,
222zyx AAAAA ++=≡
r
,
222zyx BBBBB ++=≡
r
Br
, zorientowanych względem siebie pod kątem
sumując iloczyny odpowiednich składowych wektorów
zzyyxx BABABABA ++=⋅vr
.
Br
BArr
+
Ar B
r−
Br
BArr
−
ABrr
+
Ar
Br
Br
ABrr
−Ar
−
4
z końcem przesuniętego y wektorów, a kolejność ich
dwa wektory możemy wykorzystać c wektor odejmowany wektorem przeciwnie do niego
c lub odejmując ich odpowiednie
(1.3)
(1.4)
Br
nazywamy skalar
(1.5)
(1.6)
(1.7)
tem ϕ . Iloczyn skalarny
Ar
i Br
:
(1.8)

5
Przykładem iloczynu skalarnego jest praca mechaniczna, zdefiniowana jako iloczyn skalarny siły Fr
i przesunięcia s
r:
ϕcosFssFL =⋅= rr. (1.9)
Powyższa relacja jest poprawna przy założeniu, że w każdym punkcie drogi wektor siły ma tą samą długość i jest zorientowany względem przesunięcia pod tym samym kątem. W ogólnym przypadku pracę, którą wykonuje pole siłowe F
r przemieszczając punkt wzdłuż dowolnej trajektorii z punktu
),,( 0000 zyxP do punktu ),,( zyxP określa wyrażenie:
∫ ∫ ∫ ∫→
→ ++=⋅=PP
x
x
y
y
z
z
zyxPP dzFdyFdxFsdFL0 0 0 0
0
rr. (1.10)
Rys.1. 4 Ilustracja do definicji iloczynu skalarnego (a) i wektorowego (b). Iloczyn wektorowy dwóch wektorów. Iloczynem wektorowym dwóch wektorów A
r i B
r nazywamy
wektor BAC
rrr×= , (1.11)
o długości
ϕsinBACCrrr
=≡ (1.12)
i orientacji wyznaczonej przez prostą prostopadłą do płaszczyzny, w której leżą wektory A
r i B
r.
Zwrot wektora Cr
wyznacza reguła śruby prawej (Rys.4.). Iloczyn wektorowy wektorów Ar
i Br
można także przedstawić w równoważnej postaci:
],,[ xyyxzxxzyzzy
zyx
zyx BABABABABABA
BBB
AAA
kji
BA −−−==×
r
rr
. (1.13)
Ar
Br
ϕ
Br
Arϕ
BACrrr
×=
)(a )(b

6
W odróżnieniu od iloczynu skalarnego, iloczyn wektorowy nie jest przemienny: ABBA
rrrr×−=× . (1.14)
Przykładem iloczynu wektorowego jest moment wielkości fizycznej zdefiniowany, jako iloczyn wektorowy wektora położenia (ramienia) r
r oraz wektora, od którego wywodzi się nazwa momentu.
Moment siły i moment pędu będą więc miały odpowiednio postać: = × moment siły = × moment pędu. 2. Kinematyka punktu materialnego
Zajmiemy się opisem ruchu rozumianym jako zmiany położenia jednych ciał względem innych, które nazywamy układami odniesienia. Należy zwróć uwagę, że to samo ciało może poruszać się względem jednego układu odniesienia a spoczywać względem innego. Oznacza to, że ruch jest pojęciem względnym.
Wektor położenia. Wektorem położenia lub wektorem wodzącym rr
punktu P nazywamy wektor, którego początek znajduje się w początku układu współrzędnych, natomiast koniec wyznacza położenie punktu P (Rys. 2.1.) .
Rys. 2.1. Wektor położenia we współrzędnych kartezjańskich. Składowymi wektora położenia r
r są współrzędne zyx ,, punktu P :
],,[ zyxkzjyixr ≡++=
rrrr, (2.1)
a jego długość określa wyrażenie
.222 zyxrr ++==r
(2.2)
Gdy punkt P przemieszcza się w przestrzeni, to wektor wodzący r
r, a zatem i jego składowe są
funkcjami czasu.
x
y
z
O
)( ttr ∆+r
rr
∆)(tr
r
),,( zyxP
)(tvr
ir j
r
kr

7
Prędkość punktu. Prędkością punktu w ruchu postępowym zdefiniowana jest przez pochodną wektora wodzącego po czasie:
t
trttr
t
r
dt
rdv
tt ∆−∆+
=∆∆==
→∆→∆
)()(limlim
00
rrrrr
, (2.3)
gdzie r
r∆ jest zmianą wektora wodzącego w czasie t∆ . Uwzględniając definicję (2.1), prędkość punktu możemy zapisać w postaci:
],,[ vvvv yx=r
, 222
zyx vvvvv ++==r
, (2.4)
gdzie
dt
dzv
dt
dyv
dt
dxv zyx === ,, (2.5)
są składowymi prędkości odpowiednio na kierunku zyx ,, .
Przyspieszenie punktu. Przyspieszenie punktu w ruchu postępowym zdefiniowane jest przez pochodną wektora prędkości po czasie:
t
tvttv
t
v
dt
vda
tt ∆−∆+=
∆∆==
→∆→∆
)()(limlim
00
rrrrr
. (2.6)
Uwzględniając relacje (2.4), (2.5), przyspieszenie punktu możemy zapisać w postaci:
],,[ zyx aaaa =r
, 222zyx aaaaa ++== r
, (2.7)
gdzie
2
2
2
2
2
2
,,dt
zd
dt
dav
dt
yd
dt
dva
dt
xd
dt
dva z
zy
yx
x ====== (2.8)
są składowymi wektora przyspieszenia odpowiednio na kierunku zyx ,, .
Przykład 1. Prom kursuje między przystaniami A, B znajdującymi się po przeciwnych stronach rzeki (rys) o szerokości 60 m. Pod jakim kątem należy skierować prom, aby płynął prostopadle do brzegu z
prędkością 6 s
m względem rzeki. Prędkość wody w rzece wynosi 3
s
m. Jaka jest prędkość promu
względem brzegu?
B
α
A
V Vp
Vr

8
Rys.
pvr
- wektor prędkości promu względem rzeki
rvr
- wektor prędkości prądu rzeki
vr
- wektor prędkości promu względem brzegu
Z trójkąta wektorów prędkości 2
1sin == α
p
r
v
v 030=α
s
m
s
mvv
v
vp
p
332
36coscos =⋅==⇒= αα
Jak daleko od przystani B prąd rzeki zniósłby prom, gdyby sternik skierował prom prostopadle do brzegu.
W tej sytuacji prom płynąłby z wypadkową prędkością 1vr
skierowaną pod kątem β . Jego ruch
można rozpatrywać jako złożenie dwóch ruchów prostopadłych o prędkościach pv i rv
odpowiednio. W czasie t , kiedy prom przepłynie szerokość rzeki z prędkością pv prąd rzeki zniesie go na
odległość tvs r= . Ponieważ szerokość rzeki dAB = otrzymujemy p
p v
dttvd =⇒=
i po podstawieniu
m
s
mm
s
m
v
dvs
pr 30
6
603 =⋅=⋅=
Ruch jednostajnie zmienny. W ruchu jednostajnie zmiennym ( )const=a
r zależność prędkości oraz
wektora wodzącego od czasu ma postać:
rp vvvrrr +=
d
s
A
B
V1 Vp
Vr
C
β

9
)( 00 ttavv −+=rrr
, (2.10)
2
0000 )(2
1)( ttattvrr −+−+=
rrr , (2.11)
gdzie )( 00 tvv
rr= i )( 00 trr
rr= wyznaczają odpowiednio prędkość punktu oraz jego położenie w
początkowym momencie 0t . Równanie (2.11) zapisane w skalarnej postaci przedstawia zarazem parametryczny związek między współrzędnymi zyx ,, określający tor trajektorii, po której porusza się punkt. Znajomość obydwu warunków początkowych pozwala na pełne rozwiązanie dowolnego zagadnienia kinematyki punktu poruszającego się ze stałym przyspieszeniem. W szczególności, powyższe równania można wykorzystać do opisu każdego przypadku ruchu ciała w jednorodnym polu grawitacyjnym const=g
r (rzut pionowy, spadek swobodny ciała, rzut poziomy, rzut ukośny).
Równania (2.10 i 2.11)są równaniami wektorowymi , które w aspekcie skalarnym odpowiadają sześciu równaniom – trzy dla prędkości i trzy dla wektora położenia. Jeżeli jednak ograniczymy się do ruchu prostoliniowego wzdłuż dowolnej osi (np. osi x) to przybierają one formę:
= ± , = ± 2
(2.12)
Opisują one w prosty sposób całą kinematykę punktu materialnego, przy czym znak plus odnosi się do ruchów jednostajnie przyśpieszonych, natomiast znak minus do jednostajnie opóźnionych. Jeżeli przyśpieszenie jest równe zero (a=0), równania powyższe upraszczają się opisując ruch jednostajny (ze stałą prędkością V=V0). W sytuacji kiedy V0=0 co odpowiada ruchowi jednostajnie przyspieszonemu bez prędkości początkowej przekształcają się one do postaci:
= , = 2
(2.13)
Bardzo często przedstawia się zagadnienia kinematyczne w formie wykresów pokazujących zależności przyśpieszenia, prędkości i drogi od czasu. Jak widać z powyższych relacji wielkości te zależą od czasu liniowo, a tylko droga w ruchu przyspieszonym zależy od kwadratu czasu, zatem jej wykresem musi być gałąź paraboli. Przykłady wykresów pokazujących te relacje prezentowane są poniżej. Rys.2.2 Zależność prędkości od czasu dla ruchów jednostajnie zmiennych
V
t
1
2
3
4
V0
10
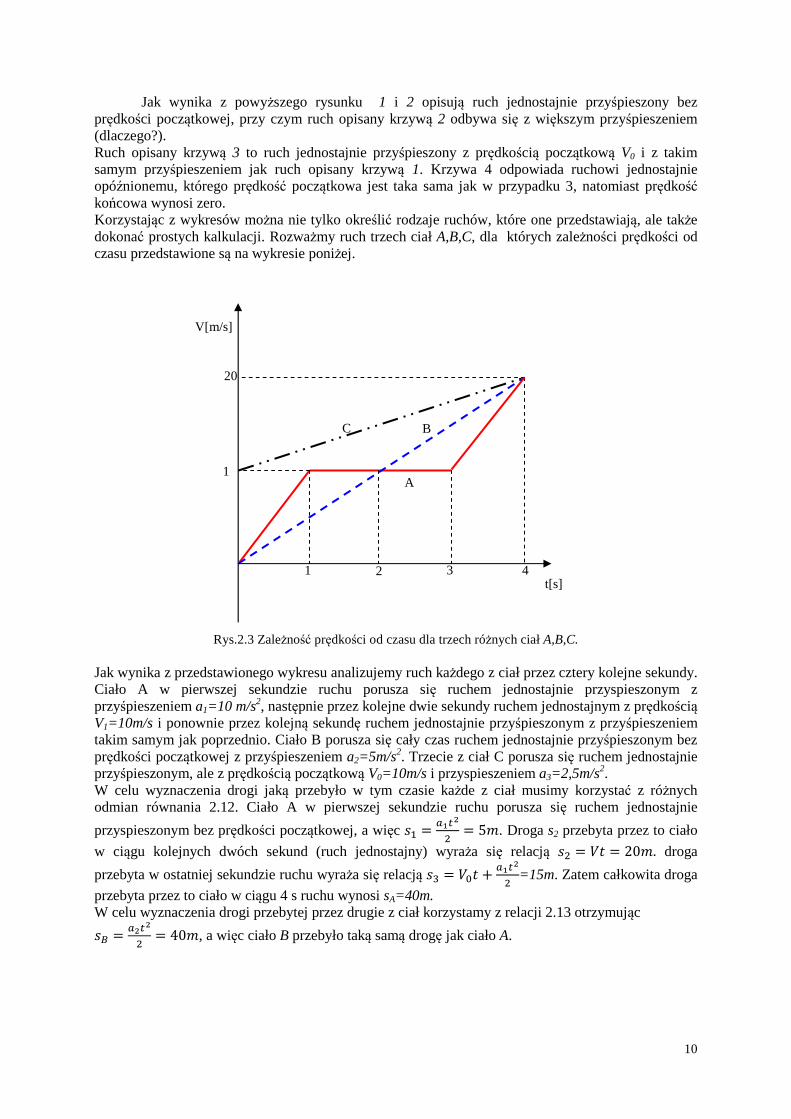
Jak wynika z powyższego rysunku 1 i 2 opisują ruch jednostajnie przyśpieszony bez prędkości początkowej, przy czym ruch opisany krzywą 2 odbywa się z większym przyśpieszeniem (dlaczego?). Ruch opisany krzywą 3 to ruch jednostajnie przyśpieszony z prędkością początkową V0 i z takim samym przyśpieszeniem jak ruch opisany krzywą 1. Krzywa 4 odpowiada ruchowi jednostajnie opóźnionemu, którego prędkość początkowa jest taka sama jak w przypadku 3, natomiast prędkość końcowa wynosi zero. Korzystając z wykresów można nie tylko określić rodzaje ruchów, które one przedstawiają, ale także dokonać prostych kalkulacji. Rozważmy ruch trzech ciał A,B,C, dla których zależności prędkości od czasu przedstawione są na wykresie poniżej.
Rys.2.3 Zależność prędkości od czasu dla trzech różnych ciał A,B,C. Jak wynika z przedstawionego wykresu analizujemy ruch każdego z ciał przez cztery kolejne sekundy. Ciało A w pierwszej sekundzie ruchu porusza się ruchem jednostajnie przyspieszonym z przyśpieszeniem a1=10 m/s2, następnie przez kolejne dwie sekundy ruchem jednostajnym z prędkością V1=10m/s i ponownie przez kolejną sekundę ruchem jednostajnie przyśpieszonym z przyśpieszeniem takim samym jak poprzednio. Ciało B porusza się cały czas ruchem jednostajnie przyśpieszonym bez prędkości początkowej z przyśpieszeniem a2=5m/s2. Trzecie z ciał C porusza się ruchem jednostajnie przyśpieszonym, ale z prędkością początkową V0=10m/s i przyspieszeniem a3=2,5m/s2. W celu wyznaczenia drogi jaką przebyło w tym czasie każde z ciał musimy korzystać z różnych odmian równania 2.12. Ciało A w pierwszej sekundzie ruchu porusza się ruchem jednostajnie
przyspieszonym bez prędkości początkowej, a więc = = 5. Droga s2 przebyta przez to ciało
w ciągu kolejnych dwóch sekund (ruch jednostajny) wyraża się relacją = = 20. droga
przebyta w ostatniej sekundzie ruchu wyraża się relacją = + =15m. Zatem całkowita droga
przebyta przez to ciało w ciągu 4 s ruchu wynosi sA=40m. W celu wyznaczenia drogi przebytej przez drugie z ciał korzystamy z relacji 2.13 otrzymując " =
= 40, a więc ciało B przebyło taką samą drogę jak ciało A.
V[m/s]
t[s] 1 3
10
20
4 2
A
B C

11
Ponieważ ruch trzeciego z ciał jest ruchem jednostajnie przyśpieszonym z prędkością początkową
drogę przebytą przez to ciało obliczamy z równania: $% = + & = 60, co oznacza, że to ono
przebyło najdłuższą drogę.
Ruch obrotowy. W ruchu po okręgu prędkość liniową oraz liniowe przyspieszenie zastępujemy odpowiednio prędkością kątową oraz przyspieszeniem kątowym:
2
2
,dt
d
dt
d
dt
d ϕωεϕω === , (2.12)
gdzie ϕd jest drogą kątową zakreśloną przez promień wodzący punktu w czasie dt (Rys. 2.2.). W
ogólnym przypadku, prędkość kątową określa wektor ωr prostopadły do płaszczyzny wyznaczonej przez wektor wodzący r
r i wektor prędkości liniowej v
v . Związek pomiędzy tymi wektorami ma postać iloczynu wektorowego: rv
rrr ×= ω . (2.13) Relacja między przyspieszeniem liniowym a
r i przyspieszeniem kątowym εr ma postać:
ra
rrr ×= ε . (2.14)
Rys. 2.2. Ilustracja wektora prędkości kątowej. Równania (2.13), (2.14), proste do udowodnienia dla ruchu po okręgu, pozostają prawdziwe dla dowolnego ruchu obrotowego, w którym prędkość liniowa, krzywizna trajektorii, orientacja i długość wektora prędkości kątowej oraz przyspieszenia kątowego ulegają ciągłej zmianie. W ruchu jednostajnie zmiennym po okręgu, wyrażenia (2.10), (2.11), odniesione do prędkości kątowej i drogi kątowej, przyjmują odpowiednio postać:
rrϕ
ϕd
ωr
vr

12
)( 00 tt −+= εωω , (2.15)
2
0000 )(2
1)( tttt −+−+= εωϕϕ , (2.16)
gdzie )( 00 tωω = i )( 00 tϕϕ = wyznaczają odpowiednio prędkość kątową punktu oraz jego położenie
kątowe w początkowym momencie 0t . Przyspieszenie styczne i normalne.
Rys. 2.3. Rozkład przyspieszenia na przyspieszenie styczne i normalne.
W ruchu prostoliniowym wektor przyspieszenia i prędkości punktu jest styczny do trajektorii. Jeżeli trajektoria nie jest prostoliniowa, to wektor przyspieszenia a
r tworzy z wektorem prędkości liniowej
vr
pewien kąt. Z wektora przyspieszenia wyodrębniamy wówczas tą jego składową sar
, która jest
związana ze zmianą wartości prędkości (przyspieszenie styczne) i składową nar
związaną ze zmianą kierunku wektora prędkości (przyspieszenie normalne): ns aaa
rrr += , (2.17)
2222
,, nsns aaaRR
va
dt
dva +==== ω , (2.18)
gdzie R jest chwilowym promieniem lokalnej krzywizny trajektorii. Przyspieszenie normalne jest zorientowane do środka wpisanego w trajektorię okręgu i nosi nazwę przyspieszenia dośrodkowego. Przykład 1. Bęben wirówki obraca się z częstotliwością Hz1801 =f . Po odcięciu zasilania bęben wykonuje
530=n obrotów ruchem jednostajnie opóźnionym zmniejszając częstotliwość obrotów do Hz802 =f . Obliczyć czas hamowania, w którym następuje opisana redukcja obrotów
i przyśpieszenie kątowe bębna. Obliczyć czas, po którym bęben się zatrzyma. Rozwiązanie: Ruch bębna odbywa się ze stałym przyspieszeniem kątowym. Zależność prędkości kątowej ω i drogi kątowej ϕ pokonanej przez bęben od czasy opisują więc równania (2.15), (2.16).
Przyjmując, że w momencie odcięcia zasilania 00 =t , 00 =ϕ , 10 2 fπω = , znajdziemy:
tf επω += 12 , 21 2
12 ttf επϕ += ,
Oar
nar sa
r
vr
R

13
gdzie ε jest przyspieszeniem kątowym. Oznaczając czas hamowania przez τ , otrzymamy układ dwóch równań z dwoma niewiadomymi ε i τ :
ετππω +== 12 22 ff , 2
1 2
122 εττππϕ +== fn .
Rozwiązując powyższy układ równań znajdziemy:
21
2
ff
n
+=τ , )( 2
1
2
2 ffn
−= πε .
Czas cτ , po którym bęben całkowicie się zatrzyma otrzymamy z warunku zerowania się prędkości kątowej: 02 1 =+= cf ετπω , skąd
ε
πτ 12f
c −= .
Podstawiając dane liczbowe otrzymamy: s4,1=τ , rad/s154−=ε , s7,2=cτ 3. Dynamika ruchu postępowego Zasady dynamiki Newtona. Zasady dynamiki Newtona oraz prawo powszechnego ciążenia w pełni opisują zagadnienia mechaniki klasycznej. Zasady te w szczególności pozwalają znaleźć wszystkie parametry opisujące ruch ciała, takie jak położenie prędkość i przyspieszenie ciała w dowolnym momencie czasu oraz równanie trajektorii, po której ciało się porusza. Z zasad dynamiki formalnie wynikają również fundamentalne zasady zachowania: zasada zachowania pędu, zasada zachowania momentu pędu oraz zasada zachowania energii mechanicznej. Pierwsza zasada dynamiki postuluje istnienie układów inercjalnych, tj. takich układów odniesienia, w których gdy na ciało nie działa siła (lub działające siły się równoważą), to ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym prostoliniowym. Układ inercjalny w uproszczony sposób można określić, jako układ, który nie doznaje przyspieszenia. Zasady dynamiki oraz wynikające z nich zapisy obowiązują w układach inercjalnych.
Druga zasada dynamiki wiąże siłę Fr
działającą na masę m ze zmianą jej pędu pr
:
dt
rr
= , vmprr
= . (3.1)
Dla względnie małych prędkości, masa mjest stała i druga zasada dynamiki przyjmuje postać:
amFrr
= , 2
2
dt
rd
dt
vda
rrr
== , (3.2)
gdzie vr
rr, i a
r jest odpowiednio wektorem wodzącym, prędkością i przyspieszeniem ciała.
Trzecia zasada dynamiki głosi, że jeżeli ciało j-te działa na ciało i-te z siłą ijFr
, to ciało i-te działa na
ciało j-te z siłą o tej samej wielkości i kierunku, lecz o przeciwnym zwrocie:
jiij FFrr
−= . (3.3)
Z zasady tej wynika, że 0=iiFr
tj., że ciało samo z sobą nie może oddziaływać.
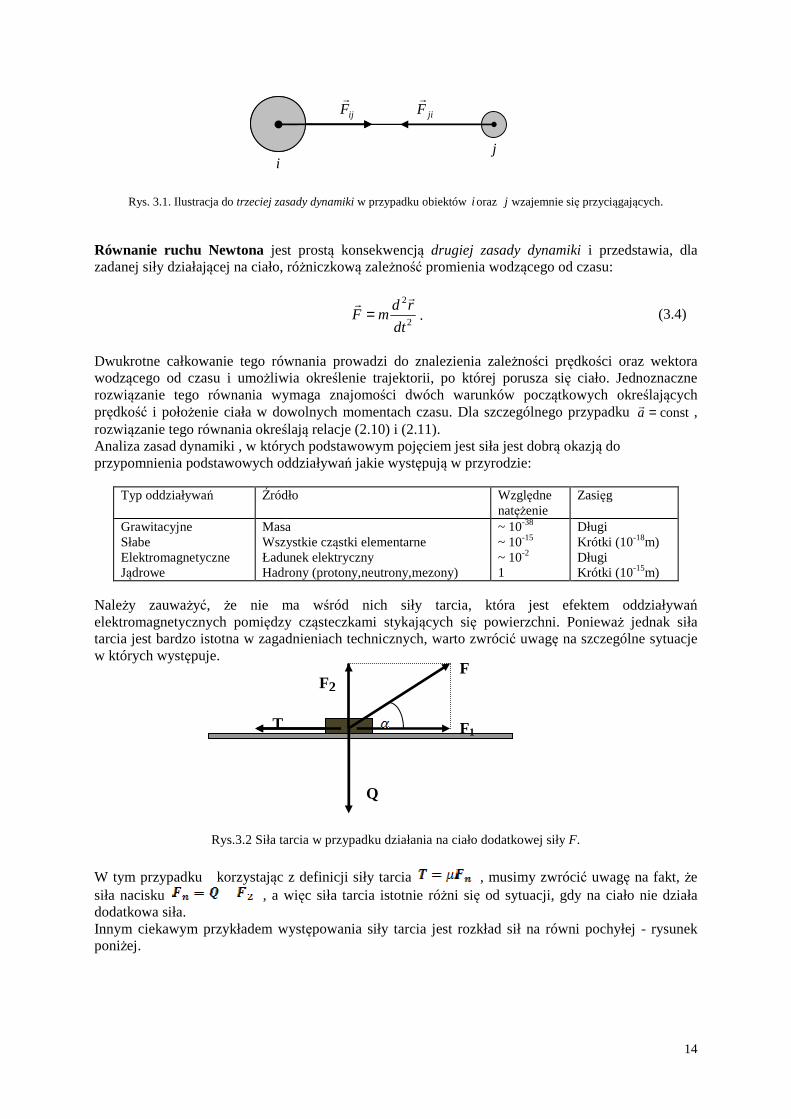
Rys. 3.1. Ilustracja do trzeciej zasady dynamiki
Równanie ruchu Newtona jest prostzadanej siły działającej na ciało, ró
Dwukrotne całkowanie tego równania prowadzi do znalezienia zalewodzącego od czasu i umożliwia rozwiązanie tego równania wymaga znajomoprędkość i położenie ciała w dowolnych momentach czasu. Dla szczególnego przypadku rozwiązanie tego równania określajAnaliza zasad dynamiki , w których podstawowym pojprzypomnienia podstawowych oddziaływa
Typ oddziaływań Źródło
Grawitacyjne Słabe Elektromagnetyczne Jądrowe
MasaWszystkie czŁadunek elektrycznyHadrony (protony,neutrony,mezony)
Należy zauważyć, że nie ma welektromagnetycznych pomiędzy cztarcia jest bardzo istotna w zagadnieniach technicznych, warto zwróciw których występuje.
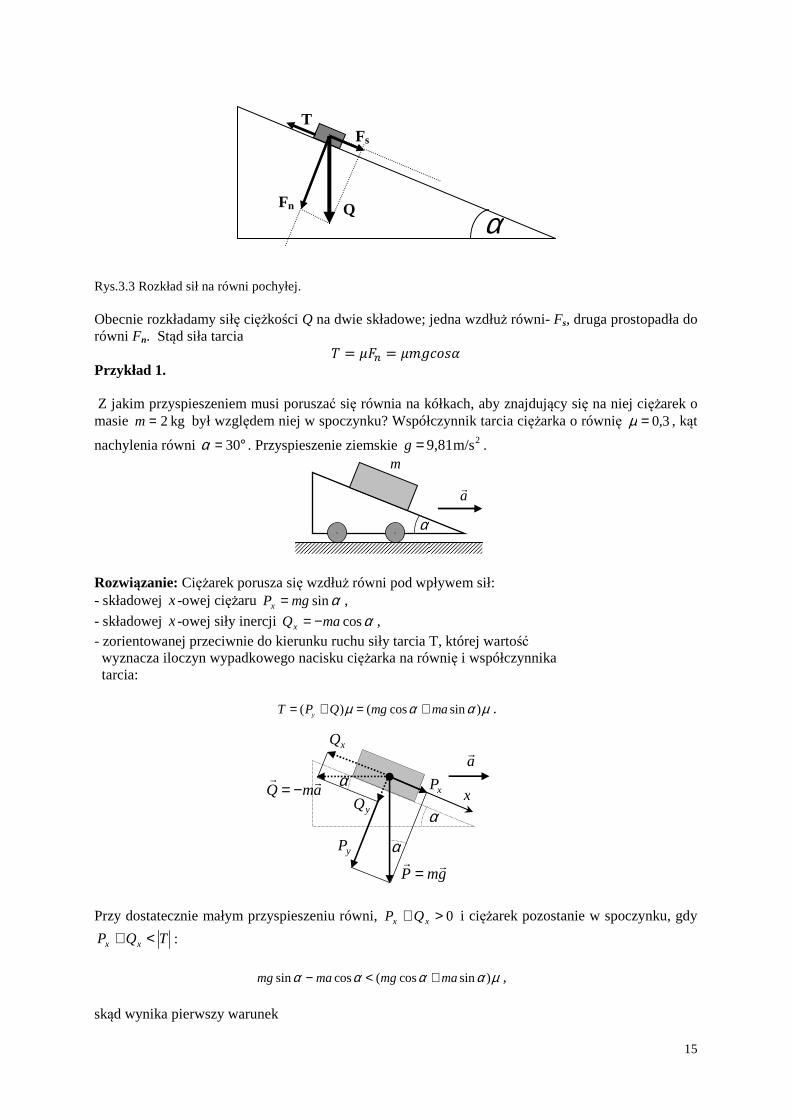
Rys.3.2 Siła tarcia w przypadku działania na ciało dodatkowej siły
W tym przypadku korzystając z definicji siły tarciasiła nacisku , a widodatkowa siła. Innym ciekawym przykładem wystponiżej.
i
T
trzeciej zasady dynamiki w przypadku obiektów i oraz j wzajemnie się
jest prostą konsekwencją drugiej zasady dynamikicej na ciało, różniczkową zależność promienia wodzącego od czasu:
2
2
dt
rdmF
rr
= .
Dwukrotne całkowanie tego równania prowadzi do znalezienia zależności prędkożliwia określenie trajektorii, po której porusza się ciało. Jednoznaczne
zanie tego równania wymaga znajomości dwóch warunków początkowych okreenie ciała w dowolnych momentach czasu. Dla szczególnego przypadku
zanie tego równania określają relacje (2.10) i (2.11). , w których podstawowym pojęciem jest siła jest dobrą okazj
przypomnienia podstawowych oddziaływań jakie występują w przyrodzie:
Źródło Względne natężenie
Masa Wszystkie cząstki elementarne Ładunek elektryczny Hadrony (protony,neutrony,mezony)
~ 10-38
~ 10-15 ~ 10-2 1
e nie ma wśród nich siły tarcia, która jest efektem oddziaływaędzy cząsteczkami stykających się powierzchni. Poniewa
tarcia jest bardzo istotna w zagadnieniach technicznych, warto zwrócić uwagę na szczególne sytuacje
Rys.3.2 Siła tarcia w przypadku działania na ciało dodatkowej siły F
ąc z definicji siły tarcia , musimy zwrócić, a więc siła tarcia istotnie różni się od sytuacji, gdy na ciało nie działa
Innym ciekawym przykładem występowania siły tarcia jest rozkład sił na równi pochyłej
ijFr
jiFr
j
F
F1
F2
Q
14
wzajemnie się przyciągających.
drugiej zasady dynamiki i przedstawia, dla cego od czasu:
(3.4)
ci prędkości oraz wektora
lenie trajektorii, po której porusza się ciało. Jednoznaczne ątkowych określających
enie ciała w dowolnych momentach czasu. Dla szczególnego przypadku const=ar
,
ą okazją do
Zasięg
Długi Krótki (10-18m) Długi Krótki (10-15m)
nich siły tarcia, która jest efektem oddziaływań powierzchni. Ponieważ jednak siła
ę na szczególne sytuacje
F.
, musimy zwrócić uwagę na fakt, że od sytuacji, gdy na ciało nie działa
powania siły tarcia jest rozkład sił na równi pochyłej - rysunek
15
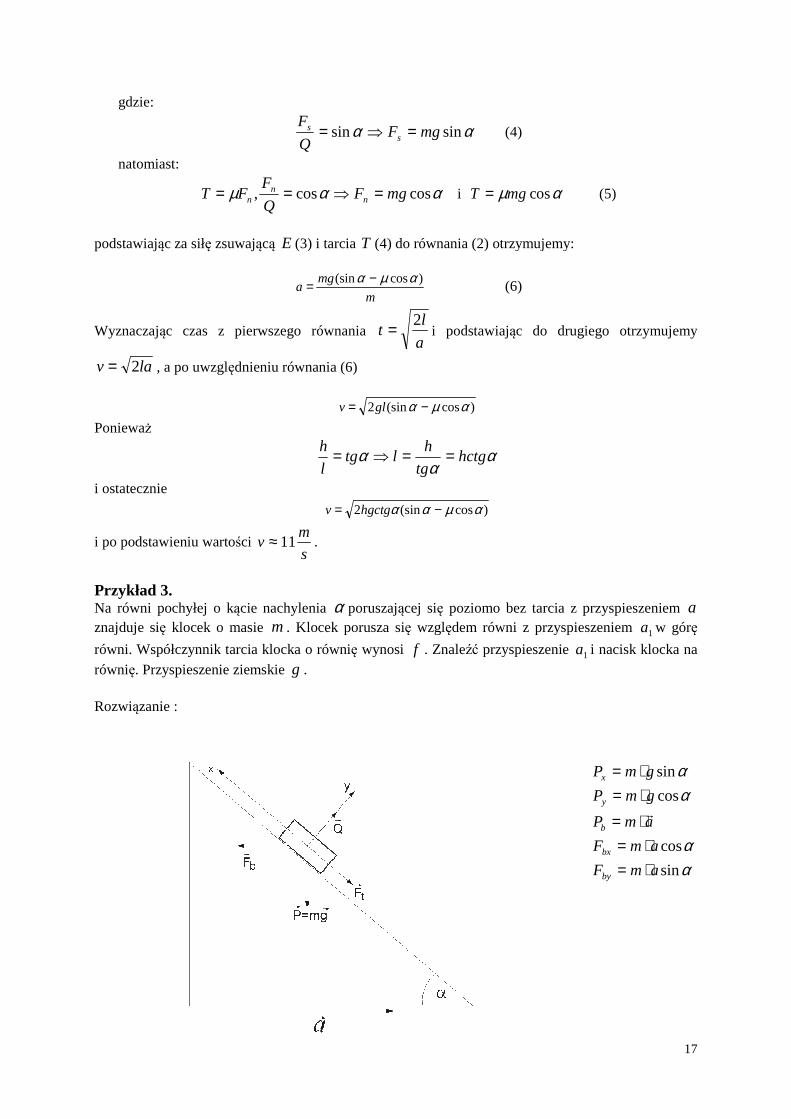
Rys.3.3 Rozkład sił na równi pochyłej. Obecnie rozkładamy siłę ciężkości Q na dwie składowe; jedna wzdłuż równi- Fs, druga prostopadła do równi Fn. Stąd siła tarcia ( = )* = )+,-. Przykład 1. Z jakim przyspieszeniem musi poruszać się równia na kółkach, aby znajdujący się na niej ciężarek o masie kg 2=m był względem niej w spoczynku? Współczynnik tarcia ciężarka o równię 3,0=µ , kąt
nachylenia równi °= 30α . Przyspieszenie ziemskie 2m/s9,81=g . Rozwiązanie: Ciężarek porusza się wzdłuż równi pod wpływem sił: - składowej x-owej ciężaru αsinmgPx = ,
- składowej x-owej siły inercji αcosmaQx −= , - zorientowanej przeciwnie do kierunku ruchu siły tarcia T, której wartość wyznacza iloczyn wypadkowego nacisku ciężarka na równię i współczynnika tarcia: µααµ )sincos()( mamgQPT y +=+= . Przy dostatecznie małym przyspieszeniu równi, 0>+ xx QP i ciężarek pozostanie w spoczynku, gdy
TQP xx <+ :
µαααα )sincos(cossin mamgmamg +<− , skąd wynika pierwszy warunek
Q Fn
Fs T
α
α
α
α
gmPrr
=
amQrr
−=
ar
xQ
xxP
yQ
yP
m
ar
α

16
αααα
sincos
cossin
f
fga
+−> .
Przy dostatecznie dużym przyspieszeniu równi, 0<+ xx QP i ciężarek pozostanie w spoczynku, gdy
TQPx <+− )( :
fmamgmamg )sincos()cossin( αααα +<−− , skąd wynika drugi warunek:
αααα
sincos
cossin
f
fga
−+< .
Obydwa warunki można ująć w jednej postaci:
αααα
αααα
sincos
cossin
sincos
cossin
f
fga
f
fg
−+<<
+−
.
Uwzględniając dane liczbowe otrzymamy: 22 m/s 10,41am/s2,32 << . Przykład 2. Z górki o wysokości m15 nachylonej do poziomu pod kątem o15=α zjeżdża dziecko na sankach. Zakładając, że współczynnik tarcia sanek o śnieg jest stały i wynosi 1,0=µ wyznaczyć prędkość, jaką uzyskają sanki u podnóża górki.
Rys.
Na odcinku AB (zjazd z górki) sanki poruszają się ruchem jednostajnie przyśpieszonym bez prędkości początkowej. Zatem droga i prędkość końcowa wyrażają się równaniami:
2
2atl = (1)
atv = (2)
Przyśpieszenie zgodnie z II zasadą dynamiki wyznaczymy korzystając z rozkładu sił (rys.)
m
TFa s −
= (3)
m
α
A
B
α
Q Fn
Fs
gdzie:
natomiast:
µ ,Q
FFT n
n ==
podstawiając za siłę zsuwającą E
Wyznaczając czas z pierwszego równania
lav 2= , a po uwzględnieniu równani
Ponieważ
i ostatecznie
i po podstawieniu wartości v 11≈
Przykład 3. Na równi pochyłej o kącie nachylenia znajduje się klocek o masie mrówni. Współczynnik tarcia klocka o równirównię. Przyspieszenie ziemskie Rozwiązanie :
αα sinsin mgFQ
Fs
s =⇒= (4)
αα coscos mgFn =⇒= i αµ cosmgT =
E (3) i tarcia T (4) do równania (2) otrzymujemy:
m
mga
)cos(sin αµα −= (6)
c czas z pierwszego równania a
lt
2= i podstawiając do drugiego otrzymujemy
dnieniu równania (6)
)cos(sin2 αµα −= glv
αα
α hctgtg
hltg
l
h ==⇒=
)cos(sin2 αµαα −= hgctgv
s
m11 .
cie nachylenia α poruszającej się poziomo bez tarcia z przyspieszeniem . Klocek porusza się względem równi z przyspieszeniem
równi. Współczynnik tarcia klocka o równię wynosi f . Znaleźć przyspieszenie . Przyspieszenie ziemskie g .
17
(5)
(4) do równania (2) otrzymujemy:
c do drugiego otrzymujemy
a z przyspieszeniem adem równi z przyspieszeniem 1a w górę
przyspieszenie 1a i nacisk klocka na
αα
αα
sin
cos
cos
sin
amF
amF
amP
gmP
gmP
by
bx
b
y
x
⋅=⋅=
⋅=
⋅=⋅=
r

18
Zapiszmy II zasadę dynamiki Newtona uwzględniając powstałą w wyniku ruchu jednostajnie
zmiennego równi siłę bezwładności) bFr
1amFQPF tb
rrrrr⋅=+++
Powyższe równanie wektorowe jest równoważne dwóm równaniom skalarnym wzdłuż osi x:
1amFPF txbx ⋅=−−
oraz y : 0=−− byy FPQ
x) 1sincos amfQgmam ⋅=−⋅−⋅ αα
y) 0sincos =⋅−⋅− αα amgmQ
Z równań znajdziemy reakcję na nacisk Q (tzn. wartość nacisku klocka na równię) i przyspieszenie
1a klocka względem równi
)cos(sin)sin(cos
)sincos(
1 αααααα
fgfaa
agmQ
+−−=+=
Przykład 4. Dwa klocki o masach m1 i m2 znajdujące się na poziomej płaszczyźnie są połączone linką. Na klocek o masie m1 (rysunek 1) zaczyna działać siła F skierowana pod kątem . do poziomu. Wyznaczyć przyśpieszenie z jakim będzie poruszał się układ oraz siłę naprężenia linki, wiedząc, że współczynniki tarcia klocków o podstawę wynoszą ). Na rysunku zaznaczone są wszystkie istotne siły działające na obydwa klocki. Siła F została rozłożona na dwie wzajemnie prostopadłe składowe F1 (wzdłuż płaszczyzny), oraz F2. Przyśpieszenie pierwszego klocka wyznaczamy zgodnie z zasadami dynamiki z równania:
= − ( − 0 Zwracamy uwagę na fakt, że jest to zapis skalarny, w którym występują tylko siły działające zgodnie z kierunkiem ruchu. Z rozkładu siły otrzymujemy: = ,-.
F
F1
F2
Q1 Q2
N N
T2 T1

19
Siła tarcia pomiędzy podstawą, a pierwszym klockiem: ( = )1 = )23 − 4 = )2+ − 56.4 Z rozkładu sił musimy zauważyć wpływ składowej F2 na siłę nacisku. Przez bezpośrednie podstawienie do równania na przyśpieszenie otrzymujemy:
= ,-. − )2+ − 56.4 − 0
Następnie analizujemy siły działające na drugi klocek i wyznaczamy jego przyśpieszenie z równania:
= 0 − (
Obecnie siła nacisku jest równa ciężarowi ciała: ( = )1 = )3 = )+ Co po wprowadzeniu do relacji na przyśpieszenie daje:
= 0 − )+
Ponieważ obydwa klocki poruszają się z tym samym przyśpieszeniem, możemy porównać prawe strony odpowiednich równań otrzymując: ,-. − )2+ − 56.4 − 0 = 0 − )+ , a stąd bezpośrednio wyznaczamy siłę naprężenia linki:
0 = 2,-. + )56.4 +
Podstawiając tą relację do równania na przyśpieszenie jednego z klocków po prostych przekształceniach algebraicznych otrzymujemy :
= 2,-. + )56.4 − )+2 + 4 +
Środek masy.
Rys. 3.4. Swobodny układ n punktów materialnych. Środek masy oznaczono przezS.
Przedstawiony na Rys. 3.4 układ n punktów materialnych o masach im może poruszać się pod
wpływem sił wzajemnego oddziaływania ijFr
oraz sił zewnętrznych 0iFr
. Rozwiązanie układu równań
ruchu Newtona dla tego przypadku nie jest na ogół możliwe. Możemy natomiast określić ruch środka masy tego układu zdefiniowanego przez wektor:
1m
2mim
1−nm
nm
O
z
x
ySRr
nrr
1−nrr
irr
2rr
1rr
0iFr
S

20
M
rm
R
n
iii
S
∑== 1
r
r, ∑
=
=n
iimM
1
, (3.5)
],,[ SSSS ZYXR =
r, ],,[ zyxr iii =
r. (3.6)
Definicja ta jest równoważna trzem zapisom skalarnym:
M
xm
X
n
iii
S
∑== 1 ,
M
ym
X
n
iii
S
∑== 1 ,
M
zm
X
n
iii
S
∑== 1 .
(3.7)
Środek masy porusza się jak punkt o masie M pod wpływem siły wypadkowej wFr
równej sumie
wszystkich sił iFr
działających na układ - redukującej się na mocy trzeciej zasady dynamiki do sumy
sił zewnętrznych 0iFr
:
Fdt
RdM S
rr
=2
2
, ∑∑==
==n
ii
n
ii FFF
10
1
rrr. (3.8)
Rys. 3.5. Ilustracja do definicji środka masy bryły o skończonych rozmiarach. Dla bryły o skończonych gabarytach, definicję środka masy (3.5) zastępuje definicja całkowa
∫=M
S dmrM
Rrr 1
. (3.9)
W celu kompleksowego spojrzenia na zasady dynamiki Newtona rozważmy kilka problemów związanych z ich zastosowaniem.
S
O
dmz
y
x
rr
SRr
M

21
Przykład 1. Ze wzgórza o wysokości m20=h wystrzelono pod kątem o35=ϕ pocisk, którego początkowa
prędkość wynosiła m/s2000 =v . Obliczyć maksymalną wysokość H , na jaką wzniesie się pocisk,
czas lotu lt oraz jego zasięg S . Przyjmując, że strzał został oddany w momencie 00 =t , znajdziemy położenie początkowe pocisku
],0[0 hr =r
oraz jego początkową prędkość ]sin,cos[ 000 ϕϕ vvv =r
. Pocisk porusza się pod wpływem stałego przyspieszenia ziemskiego ],0[ gg −=
r, więc jego prędkość v
r oraz położenie r
r będą określone
przez równania (2.10), (2.11). Uwzględniając warunki początkowe znajdziemy:
tgvvrrr += 0 , 2
00 2
1tgtvrrrrr ++= ,
lub po rozpisaniu na składowe: tgvvvvx ],0[]sin,cos[],[ 00 −+= ϕϕ ,
2
00 ],0[2
1]sin,cos[],0[],[ tgtvvhyx −++= ϕϕ .
Wektory są sobie równe, jeżeli ich składowe są sobie równe. Porównując odpowiednie składowe wektora prędkości i położenia otrzymamy:
ϕcos0vvx = , gtvvy −= ϕsin0 ,
ϕcos0tvx = , 20 2
1sin gttvhy −+= ϕ .
W najwyższym położeniu pocisku składowa prędkości 0=yv , skąd czas, po którym zostanie
osiągnięta ta wysokość wyniesie gvtH /sin0 ϕ= . Maksymalne wzniesienie pocisku będzie więc wynosiło:
g
vhtyH H 2
)sin()(
2
0 ϕ+== .
Czas lotu pocisku lt określa warunek 0=y , który sprowadza się do równania kwadratowego:
0)sin()2
1( 0
2 =++− htvtg ll ϕ .
H
h
0vr
x
vr
gr
y
rr
Sjr
ir
ϕ
22
Dodatnim rozwiązaniem tego równania jest poszukiwany czas
g
h
g
v
g
vtl
2)
sin(
sin 200 ++= ϕϕ.
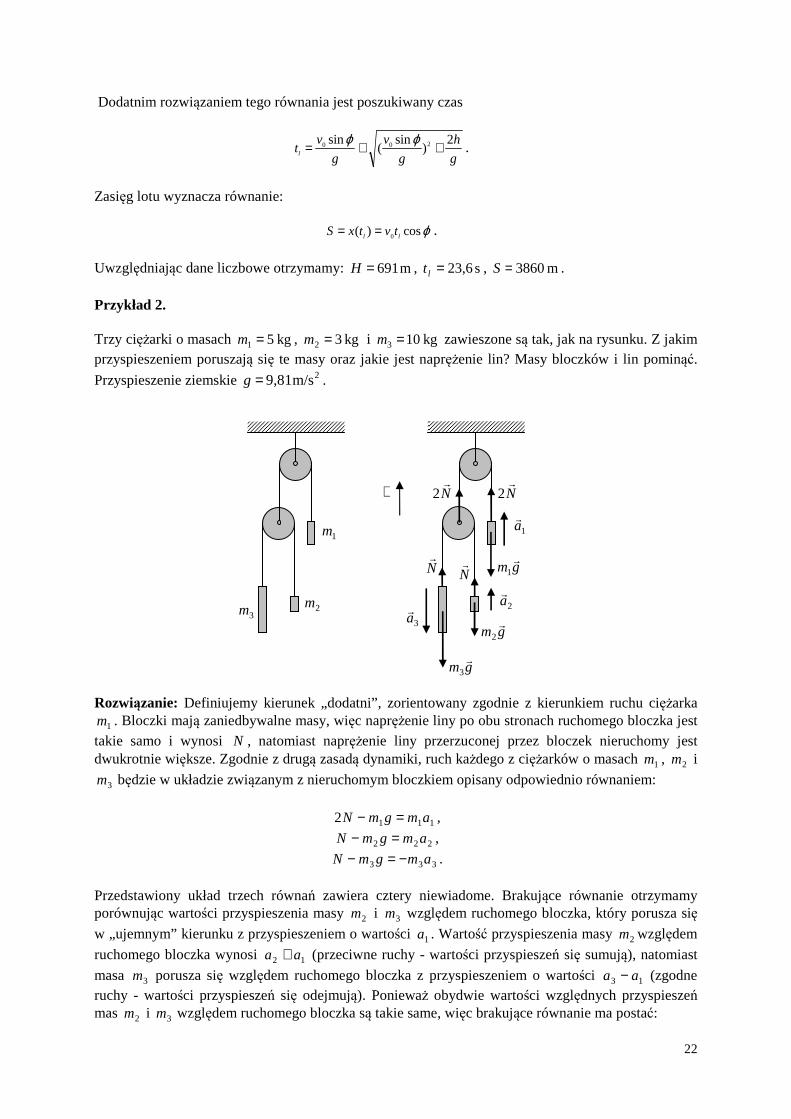
Zasięg lotu wyznacza równanie: ϕcos)( 0 ll tvtxS == . Uwzględniając dane liczbowe otrzymamy: m691=H , s23,6=lt , m3860=S . Przykład 2. Trzy ciężarki o masach kg 51 =m , kg 32 =m i kg 103 =m zawieszone są tak, jak na rysunku. Z jakim przyspieszeniem poruszają się te masy oraz jakie jest naprężenie lin? Masy bloczków i lin pominąć.
Przyspieszenie ziemskie 2m/s9,81=g . Rozwiązanie: Definiujemy kierunek „dodatni”, zorientowany zgodnie z kierunkiem ruchu ciężarka
1m . Bloczki mają zaniedbywalne masy, więc naprężenie liny po obu stronach ruchomego bloczka jest takie samo i wynosi N , natomiast naprężenie liny przerzuconej przez bloczek nieruchomy jest dwukrotnie większe. Zgodnie z drugą zasadą dynamiki, ruch każdego z ciężarków o masach 1m , 2m i
3m będzie w układzie związanym z nieruchomym bloczkiem opisany odpowiednio równaniem:
1112 amgmN =− ,
222 amgmN =− ,
333 amgmN −=− .
Przedstawiony układ trzech równań zawiera cztery niewiadome. Brakujące równanie otrzymamy porównując wartości przyspieszenia masy 2m i 3m względem ruchomego bloczka, który porusza się
w „ujemnym” kierunku z przyspieszeniem o wartości 1a . Wartość przyspieszenia masy 2m względem
ruchomego bloczka wynosi 12 aa + (przeciwne ruchy - wartości przyspieszeń się sumują), natomiast
masa 3m porusza się względem ruchomego bloczka z przyspieszeniem o wartości 13 aa − (zgodne ruchy - wartości przyspieszeń się odejmują). Ponieważ obydwie wartości względnych przyspieszeń mas 2m i 3m względem ruchomego bloczka są takie same, więc brakujące równanie ma postać:
gmr
1
1ar
2ar
3ar
Nr
gmr
3
gmr
2
Nr
Nr
2 Nr
2+
1m
3m 2m

23
1312 aaaa −=+ . Rozwiązując powyższy układ czterech równań otrzymamy:
gmmmmm
mmmmma
)(4
)(4
2132
321321 ++
+−= ,
gmmmmm
mmmagmN
)(4
4)(
2
1
2132
32111 ++
=+= ,
gmmmmm
mmmmmm
m
gmNa
)(4
)()(4
32132
21213
2
22 ++
+−−=−= ’
gmmmmm
mmmmmm
m
Ngma
)(4
)(*)(4
2132
21132
3
33 ++
++−=−= .
Uwzględniając dane liczbowe znajdziemy: 21 m/s2,92=a , 2
2 m/s80,0=a , 23 m/s63,6=a ,
N31,82=N .
4. Pęd, zasada zachowania pędu Pęd ciała definiujemy jako iloczyn jego masy i jego prędkości wektorowej.
=
(4.1)
Zapamiętamy, że wektor pędu ma taki sam zwrot i kierunek jak wektor prędkości ciała.Rozważamy
układ izolowany (rys 4.1) - wypadkowa sił zewnętrznych jest równa zero 0=∑ zFr
natomiast poszczególne elementy układu (dla przejrzystości ograniczyliśmy się na rysunku do trzech
ciał) oddziaływają zgodnie z zasadami dynamiki jiij FFrr
−=
Rys.4.1 Ilustracja do zasady zachowania pędu
1
2 3
F12 F13
F21 F23
F31
F32
F3

24
Obliczamy zmiany pędu poszczególnych elementów układu
13121 FFt
p rrr
+=∆
∆
23212 FFt
p rrr
+=∆
∆
32313 FFt
p rrr
+=∆
∆
Zmiana pędu całego układu wynosi:
t
p
t
p
t
p
t
p
∆∆
+∆
∆+
∆∆
=∆∆ 321
rrrr
0323123211312 =+++++=∆∆
FFFFFFt
p rrrrrrr
Otrzymany rezultat oznacza, że chociaż pędy poszczególnych elementów układu ulegają zmianie to pęd układu rozumiany jako suma wektorowa pędów poszczególnych elementów pozostaje stały. Zasada zachowania pędu. Jeżeli wypadkowa siła działająca na układ n punktów materialnych jest równa zeru, to całkowity pęd układu, zdefiniowany jako wektorowa suma pędów poszczególnych punktów, pozostaje wielkością stałą:
01
01
=== ∑∑==
n
ii
n
ii FFF
rrr, const
1
==∑=
n
iipPrr
. (4.2)
Wypadkowa siła równa jest sumie sił zewnętrznych 0iFr
, ponieważ siły wzajemnego oddziaływania znoszą się na mocy trzeciej zasady dynamiki. Zasada ta obowiązuje więc w szczególności w układzie izolowanym, tj. układzie, w którym nie ma oddziaływań zewnętrznych lub w układzie, w którym oddziaływania zewnętrzne istnieją, ale się równoważą. Gdy 0≠F
r, zasada zachowania pędu może
obowiązywać także selektywnie na wybranym kierunku pod warunkiem, że na tym kierunku działające siły się znoszą lub nie występują. Wektorowy zapis zasady zachowania pędu równoważny jest trzem zapisom skalarnym:
const1
==∑=
n
iixx pP , const
1
==∑=
n
iiyy pP , const
1
==∑=
n
iizz pP . (4.3)
Równania (4.2), (4.3) obowiązują również dla ciał o skończonych rozmiarach, jeżeli pędy punktów materialnych zastąpimy pędami środków mas tych ciał. Ponieważ zasada zachowania pędu jest jedną z trzech podstawowych zasad obowiązujących w przyrodzie przeanalizujmy kila przykładowych problemów w których ona jawnie występuje. Przykład 1. Kula o masie kg0,51 =m , poruszająca się z prędkością m/s31 =v , zderza się sprężyście ze
spoczywającą kulą o masie kg0,32 =m . Po zderzeniu kula o masie 2m porusza się pod kątem o65=β względem pierwotnego kierunku przemieszczania się kuli o masie 1m . Znaleźć prędkości 1u
i 2u obydwu kul po zderzeniu oraz kąt α , o który odchyli się trajektoria kuli o masie 1m .

25
Rozwiązanie: Zderzenia kul są sprężyste, więc nie ma strat energii kinetycznej i energia kinetyczna układu przed zderzeniem kul jest taka sama jak po zderzeniu:
222
211
211 2
1
2
1
2
1umumvm += .
Ponieważ nie ma oddziaływań zewnętrznych, więc sumaryczny pęd układu przed zderzeniem i po zderzeniu także pozostaje stały. Zasada zachowania pędu (4.2) odniesiona do kierunkówx i y przyjmie odpowiednio postać:
βα coscos 221111 umumvm += ,
βα sinsin0 2211 umum −= .
Wprowadzając parametr 12 / mm=κ , otrzymamy układ trzech równań z trzema poszukiwanymi
wielkościami 1u , 2u , α :
22
21
21 uvu κ−= ,
βκα coscos 211 uvu −= ,
βκα sinsin 21 uu = .
Pierwsze z równań pozostawiamy bez zmian. Pozostałe dwa równania podnosimy stronami do kwadratu i dodajemy otrzymując w wyniku układ dwóch równań postaci:
22
21
21 uvu κ−= ,
22
221
21
21 cos2 uuvvu κβκ +−= .
Odejmując otrzymane równania stronami, znajdujemy równanie, którego rozwiązaniem jest poszukiwana wartość 2u :
κ
β+
=1
cos2 12
vu .
Znajomość 2u pozwala już w prosty sposób obliczyć dwie pozostałe niewiadome:
1
22
2
2
2
11 1
cos4)1(vuvu
κβκκ
κ+−+
=−= ,
βκκβκβκα
221
2
cos4)1(
)2sin(sinsin
−+==
u
u.
1u
β
1m2m
1v α
2m
1m
2u
y
x

26
Podstawiając wartości liczbowe otrzymamy: m/s2,731 =u , m/s58,12 =u , o35,18=α . Moment pędu. Zasada zachowania momentu pędu. Jeżeli wypadkowy moment sił M
r działający na układ punktów materialnych jest równy zeru, to
całkowity moment pędu (kręt) układu Lr
pozostaje wielkością stałą:
01
==∑=
n
iiMM
rr, constLL
n
ii ==∑
=1
rr, (4.4)
gdzie iMr
oraz iLs
jest momentem siły i momentem pędu i-tego punktu:
iii FrMrrr
×= , iii prLrrr
×= . (4.5)
Jeżeli w układzie punktów swobodnych spełnione są dwa warunki:
• układ jest izolowany, tj. 00 =iFr
dla każdego i ,
• siły wzajemnego oddziaływania ijFr
są siłami centralnymi, czyli takimi siłami, których kierunek
działania pokrywa się z kierunkiem prostej przechodzącej przez obydwa punkty i oraz j (Rys. 4.2),
to wypadkowy moment siły Mr
jest równy zeru, a wypadkowy moment pędu Lr
jest wielkością stałą.
Rys. 4.2. Ilustracja sił centralny Przykładem sił centralnych są siły wynikające z prawa powszechnego ciążenia oraz prawa Coulomba. Przykład 1. Na punkt materialny o masie kg1=m działa siła N]3,2,1[ −=F
r. W momencie s50 =t położenie
punktu oraz jego prędkość określone były odpowiednio przez wektory m]4,2,1[0 −=rr
oraz
m/s]4,2,1[0 −=vr
. Obliczyć moment siły Mr
oraz moment pędu Lr
punktu względem początku układu
współrzędnych w momencie s20=t . Rozwiązanie: Punkt porusza się pod wpływem stałej siły, więc jego prędkość oraz położenie opisują odpowiednio równania (2.10) oraz (2.11):
)( 00 ttavv −+=rrr
, m
Fa
rr = ,
im
jm
ijFr
jiFr
irr
jrr
ji rrrr −
ijji Frr ||rr −
O

Zgodnie z definicją momentu siły
rFrMrrr
+=×= 0
Po podstawieniu danych liczbowych znajdziemy zale
1
6)( +−= t
i
tM
r
r
Dla s20=t , 56,22,212[)20( −−=Mr
Moment pędu definiuje iloczyn
( 00 vrm
vmrL
rr
rrr
×=
=×=
Podstawiając dane liczbowe otrzymamy:
687[
21
21)(
2
+−=
−−=
t
ji
tL
rr
r
Dla s20=t , 2
1569,1621[)20( −=L
r
5. Praca i energia. Zasada zach
Praca wykonana przez stałą sił
W najprostszym przypadku, siładziałania siły. Wtedy
(Iloczyn dwóch wektorów daje liczbZastanówmy się czy kąt α może bymieć kierunku zgodnego z kierunkiem ruchu ciała. Oczywi
2
0000 )(2
1)( ttattvrr −+−+=
rrr,
momentu siły
amttvramttattvrrrrr
×−+=×
−+−+ )]([)(2
1)( 000000 .
Po podstawieniu danych liczbowych znajdziemy zależność momentu siły od czasu:
.mN]244,2,6814[
32
164122 +−++−=−−− ttttt
kjrr
Nm]56 ⋅ , Nm220)20( ⋅≈Mr
.
.)()(2
1))(()
)]([0(2
1)(
2
000
000000
arttmarttm
ttavmttattvr
rr
rrrr
×−+×−+
=−+×
−+−+
c dane liczbowe otrzymamy:
.s
m kg0]7242,
2
1302
2
1,18168
321
421)5(2
1
321
421)5(
4
4
222
2
−+−−+−
=−
−−+−
−−+
ttttt
kji
t
kji
t
krrrrrrr
s
m kg]390,
2
1 2
− , s
m kg1762)20(
2
≈Lr
.
5. Praca i energia. Zasada zachowania energii mechanicznej
Praca wykonana przez stałą siłę
W najprostszym przypadku, siłaFr
jest stała, a ciało porusza się pod kątem
7 = ∙ = ,-.
yn dwóch wektorów daje liczbę). że być różny od zera? Odpowiedź jest twierdząca, bo stała siła nie musi
kierunku zgodnego z kierunkiem ruchu ciała. Oczywiście muszą działać jeszcze inne siły (np.
27
momentu siły od czasu:
do kierunku
(5.1)
ąca, bo stała siła nie musi ć jeszcze inne siły (np.

ciężar, tarcie). Gdyby działała tylko jedna to idziałania np. rzut ukośny (tylko grawitacja).Wzór Fr cosα określa jedynie pracwykonaną przez inne należy obliczyotrzymujemy pierwszy wzór Fr. Gdy
Praca wykonana przez siłę zmienn
Rozważmy teraz siłę będącą funkcjpracy jaką wykona ta siła przy przesuwaniu ciała od połowzoru W = Fr cosα czyli co podstawi Rys.5.1 Praca wykonana przez siłę Zaczynamy od przybliżenia. Dzielimy całkowite przemieszczenie na (rysunek powyżej). Wewnątrz takiego przedziału przyjmujemy (a jest to przyblistała (prawie) i możemy teraz policzysiły na tym odcinku. Zwróćmy uwagrównoważne liczeniu sumy powierzchni prostokmożemy zsumować prace na kolejnyccałkowitą.
Żeby poprawić to przybliżenie dzielimy przedział (granicy do . W rezultacie
7
To jest definicja całki. Liczbowo odpowiada to liczeniu pola powierzchni pod krzywprzedziale - granicach).
F2
F1
Fi
ała tylko jedna to i tak ciało nie musiałoby poruszać
ny (tylko grawitacja). la jedynie pracę wykonaną przy przemieszczaniu punktu przez jedn
y obliczyć oddzielnie i potem je zsumować. Zwróćmy uwag. Gdy α = 90° to z równania wynika, że W = 0.
zmienną
funkcją położenia F(x), której kierunek jest zgodny z wykona ta siła przy przesuwaniu ciała od położenia x1 do położenia x2. Jak skorzysta
czyli co podstawić za F, skoro wartość jej zmienia się (rysunki poni
Rys.5.1 Praca wykonana przez siłę zmienną
enia. Dzielimy całkowite przemieszczenie na n jednakowych odcinków trz takiego przedziału przyjmujemy (a jest to przybli
emy teraz policzyć pracę na tym odcinku ∆xi: ∆Wi = Fi∆xi, gdzie my uwagę, że od strony czysto formalnej (geometria) liczenie pracy jest
ne liczeniu sumy powierzchni prostokątów o szerokości ∆xi i wysoko prace na kolejnych odcinkach (zsumować pola prostokątów) i otrzyma
i
n
i
i xFW ∑=
∆=1
enie dzielimy przedział (x1, x2) na więcej (mniejszych) odcinków d
7 = lim∆=→ ? @∆@ = A 24B==`@
To jest definicja całki. Liczbowo odpowiada to liczeniu pola powierzchni pod krzyw
X2 X1
28
tak ciało nie musiałoby poruszać się w kierunku jej
przy przemieszczaniu punktu przez jedną siłę. Pracę ćmy uwagę, że gdy α = 0
), której kierunek jest zgodny z osią x. Szukamy . Jak skorzystać ze
(rysunki poniżej)?
jednakowych odcinków ∆xi trz takiego przedziału przyjmujemy (a jest to przybliżenie), że siła jest
, gdzie Fi jest wartością e od strony czysto formalnej (geometria) liczenie pracy jest
i wysokości Fi. Następnie ątów) i otrzymać pracę
(5.2)
cej (mniejszych) odcinków dążąc w
(5.3)
To jest definicja całki. Liczbowo odpowiada to liczeniu pola powierzchni pod krzywą (w zadanym

29
W polu sił konserwatywnych energia potencjalna określona jest z dokładnością do stałej )( 0rVr
, którą
dla zdefiniowanego położenia 0rr
przyjmujemy zwykle, jako równą zeru. Energią potencjalną w punkcie P jest wówczas pracą, którą wykonuje pole konserwatywne przemieszczając punkt materialny po dowolnej drodze z punktu P do punktu 0P . W polu siły konserwatywnej całkowita energia mechaniczna układu, równa sumie energii kinetycznej i energii potencjalnej punktu w polu tej siły, jest w dowolnym miejscu trajektorii stała: constVTE =+= . (5.4) Przykładem sił zachowawczych są siły grawitacji oraz siły sprężyste. Zasada zachowania energii mechanicznej wyrażona równaniem (4.9) obowiązuje również w odniesieniu do układu punktów materialnych, jeżeli przez T i V wyrazimy odpowiednio sumę energii kinetycznych i potencjalnych wszystkich punktów układu. Siły niezachowawcze lub niekonserwatywne, to takie siły, których praca zależy od kształtu drogi, po której przemieszczane jest ciało. Przykładem sił niezachowawczych są siły tarcia oraz siły oporu. Praca sił niekonserwatywnych ulega dyssypacji (rozproszeniu), a całkowita energia mechaniczna izolowanego układu maleje. Zachowanie całkowitej energii. W ogólnym przypadku, poza siłami konserwatywnymi na układ mogą dodatkowo działać siły zewnętrzne oraz siły niezachowawcze w postaci sił tarcia i oporów. Wypadkowa siła działająca na układ przyjmie wówczas postać:
tzcw FFFFrrrr
++= , (5.5)
Zmiana energii wewnętrznej jest więc równoważna pracy sił tarcia i oporów i nie jest ujęta w zmianie energii mechanicznej układu. Pracę tą w całości znajdujemy w postaci energii rozproszonej w układzie. Przykład 1. Wykazać, że podczas swobodnego spadku energia kinetyczna ciała w najniższym punkcie toru jest dokładnie równa jego energii potencjalnej w chwili początkowej. Rozwiązanie. W celu pełnego zrozumienia problemu posłużmy się rysunkiem, na którym dane ciało znajduje się w chwili początkowej w punkcie A na wysokości h nad powierzchnią. Względem niej posiada ono energię potencjalną EA=mgh. Puszczone swobodnie ciało (zaniedbujemy opory ruchu) porusza się ruchem jednostajnie przyśpieszonym i uderza w powierzchnię w punkcie B, w którym posiada energię kinetyczną:
A
B
h

30
D" = 2
Ponieważ jest to ruch jednostajnie przyśpieszony (z przyśpieszeniem ziemskim g), bez prędkości początkowej korzystamy z relacji:
ℎ = +2 , = +
Wyznaczamy z pierwszego z równań czas trwania ruchu = FGH , który po podstawieniu do
drugiego z równań pozwala wyznaczyć prędkość ciała w punkcie B, = I2+ℎ. Uwzględniając powyższą zależność w równaniu na energię kinetyczną punkcie B, otrzymujemy: D" = 2 JI2+ℎK = +ℎ, Co oznacza, że jest ona dokładnie równa energii potencjalnej w punkcie A. W powyższym przykładzie analizowaliśmy dwa skrajne punkty toru, jednak możemy wybrać dowolny punkt C, w którym spadające swobodnie ciało posiada zarówno energię kinetyczną:
DL = M2
VC- prędkość ciała w punkcie C, jak również energię potencjalną: DN = +O W efekcie całkowita energia swobodnie spadającego ciała w punkcie C wynosi:
DM = DL + DN = M2 + +O
i jest dokładnie równa energii w punkcie A i energii w punkcie B. Przykład 2. Wyznaczyć prędkość środka masy jednorodnej kuli u podnóża równi o wysokości h, zakładając że staczała się bez tarcia i bez poślizgu. Przeanalizujemy dwa warianty rozwiązań powyższego problemu, po pierwsze żeby pokazać znaczenie wyboru układu odniesienia, a po żeby drugie przybliżyć twierdzenie Steinera. Rozważmy zagadnienie względem środka masy kuli, który uczestniczy jednocześnie w dwóch rodzajach ruchu; postępowym i obrotowym. Odpowiada mu więc energia kinetyczna związana z tymi dwoma formami ruchu. W punkcie A na szczycie równi (rys) kulka posiada energię potencjalną, która względem podstawy wynosi: DP = +ℎ
A
B
h C
H

31
Podczas staczania się bez tarcia i bez poślizgu energia potencjalna kulki zamienia się w energię kinetyczną ruchu postępowego i obrotowego. Tak, że w punkcie B wynosi ona:
D" = 2 + QR
2
Q = S jest momentem bezwładności kulki względem osi obrotu przechodzącej przez środek
masy. W rozważanym przypadku gdzie nie ma poślizgu prędkość liniowa i kątowa są
D" = 2 + 25 T U
2 = 710
Korzystając z zasady zachowania energii DP = D" otrzymujemy:
+ℎ = 710
I w rezultacie : = FXHG .
Ten sam wynik możemy uzyskać analizując zachowanie kulki względem rzeczywistej-chwilowej osi obrotu, którą wyznacza punkt styczności kulki z podłożem- punkt S. Względem niego kulka wykonuje wyłącznie ruch obrotowy i jej energia kinetyczna w punkcie B jest wyłącznie energią kinetyczną związaną z ruchem obrotowym:
D" = QR2
Jednak tym razem moment bezwładności musi być liczony nie względem osi przechodzącej przez środek masy jak poprzednio, ale względem osi rzeczywistej odległej od osi związanej ze środkiem masy o promień kulki – r. W celu wyznaczenia I, korzystamy z twierdzenia Steinera:
Q = Q + = XS .
Podstawiając tą relację do równania na energię kinetyczną w punkcie B otrzymujemy:
D" = TYZU XS = X ,
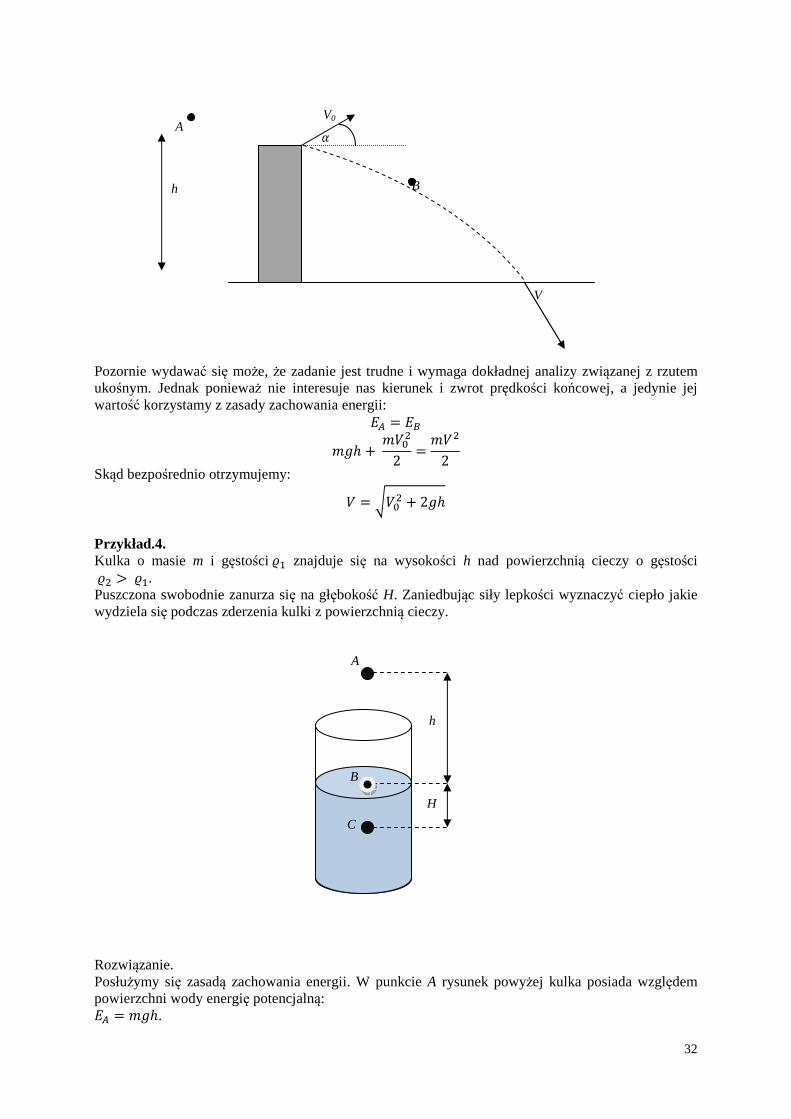
a więc dokładnie taką samą wartość jak poprzednio i w rezultacie wartość prędkości również musi być analogiczna. Przykład.3 Z okna znajdującego się na wysokości h nad powierzchnią rzucamy piłkę nadając jej prędkość V0 skierowaną pod kątem . do poziomu (rys.). Z jaką prędkością uderzy piłka w powierzchnię ziemi?
h
A
B
S
O
32
Pozornie wydawać się może, że zadanie jest trudne i wymaga dokładnej analizy związanej z rzutem ukośnym. Jednak ponieważ nie interesuje nas kierunek i zwrot prędkości końcowej, a jedynie jej wartość korzystamy z zasady zachowania energii: DP = D"
+ℎ + 2 = 2
Skąd bezpośrednio otrzymujemy:
= F + 2+ℎ
Przykład.4. Kulka o masie m i gęstości [ znajduje się na wysokości h nad powierzchnią cieczy o gęstości [ > [. Puszczona swobodnie zanurza się na głębokość H. Zaniedbując siły lepkości wyznaczyć ciepło jakie wydziela się podczas zderzenia kulki z powierzchnią cieczy. Rozwiązanie. Posłużymy się zasadą zachowania energii. W punkcie A rysunek powyżej kulka posiada względem powierzchni wody energię potencjalną: DP = +ℎ.
.
V0
V
h
A
B
H
h
A
B
C
33
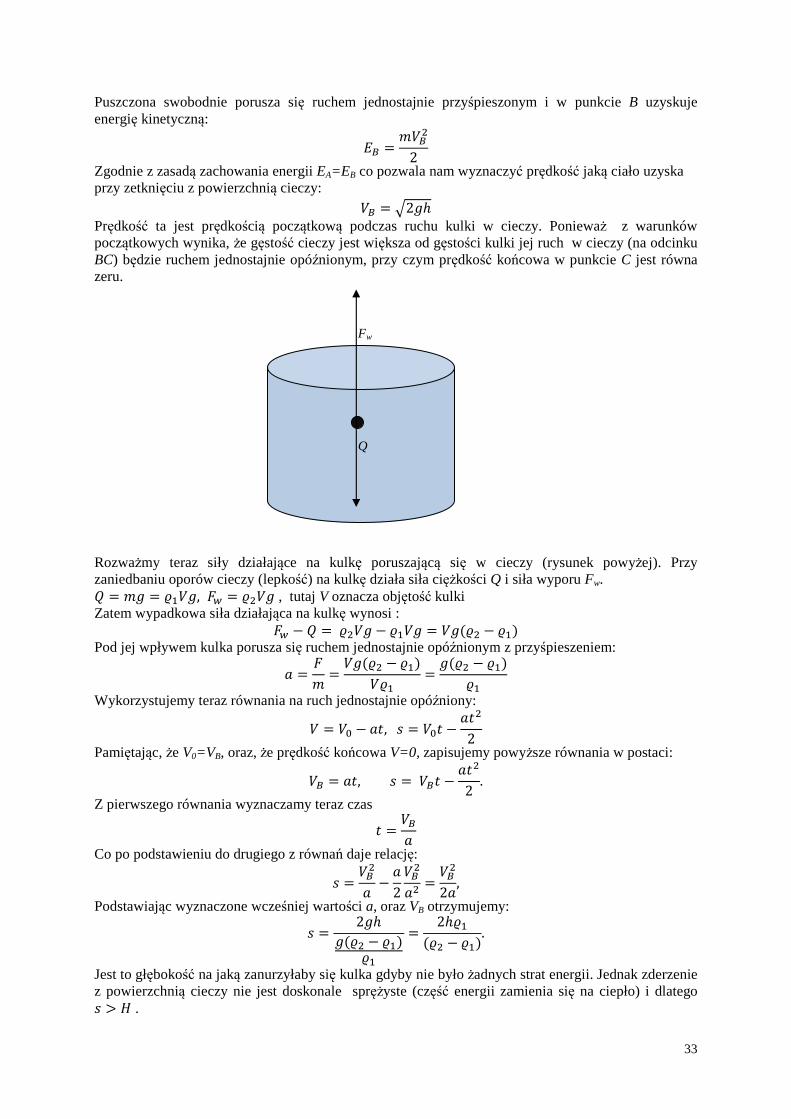
Puszczona swobodnie porusza się ruchem jednostajnie przyśpieszonym i w punkcie B uzyskuje energię kinetyczną:
D" = "2
Zgodnie z zasadą zachowania energii EA=EB co pozwala nam wyznaczyć prędkość jaką ciało uzyska przy zetknięciu z powierzchnią cieczy: " = I2+ℎ Prędkość ta jest prędkością początkową podczas ruchu kulki w cieczy. Ponieważ z warunków początkowych wynika, że gęstość cieczy jest większa od gęstości kulki jej ruch w cieczy (na odcinku BC) będzie ruchem jednostajnie opóźnionym, przy czym prędkość końcowa w punkcie C jest równa zeru. Rozważmy teraz siły działające na kulkę poruszającą się w cieczy (rysunek powyżej). Przy zaniedbaniu oporów cieczy (lepkość) na kulkę działa siła ciężkości Q i siła wyporu Fw. 3 = + = [ +, ] = [ + , tutaj V oznacza objętość kulki Zatem wypadkowa siła działająca na kulkę wynosi : ] − 3 = [ + − [ + = +2[ − [4 Pod jej wpływem kulka porusza się ruchem jednostajnie opóźnionym z przyśpieszeniem:
= = +2[ − [4 [ = +2[ − [4[
Wykorzystujemy teraz równania na ruch jednostajnie opóźniony:
= − , = − 2
Pamiętając, że V0=VB, oraz, że prędkość końcowa V=0, zapisujemy powyższe równania w postaci:
" = , = " − 2 .
Z pierwszego równania wyznaczamy teraz czas
= "
Co po podstawieniu do drugiego z równań daje relację:
= " − 2 " = "2, Podstawiając wyznaczone wcześniej wartości a, oraz VB otrzymujemy:
= 2+ℎ+2[ − [4[= 2ℎ[2[ − [4.
Jest to głębokość na jaką zanurzyłaby się kulka gdyby nie było żadnych strat energii. Jednak zderzenie z powierzchnią cieczy nie jest doskonale sprężyste (część energii zamienia się na ciepło) i dlatego > O .
Q
Fw

34
Z drugiej strony jest to równanie, które pozwala nam wyznaczyć wysokość h , z jakiej spadła kulka o danej gęstości, jeżeli wiemy, że zanurzyła się w danej cieczy na głębokość s.
ℎ = 2[ − [42[
Stąd w naszym przypadku, kulka, która zanurzyła się na głębokość H, bez strat energii powinna spaść z wysokości h1<h:
ℎ = O2[ − [42[
Natomiast energia potencjalna kulki odpowiadająca różnicy wysokości ∆ℎ = ℎ − ℎ jest liczbowo równa ciepłu jakie wydzieliło się podczas zderzenia kulki z powierzchnią cieczy;
∆D = 2ℎ − ℎ 4+ = + ^ℎ − O2[ − [42[ _
6. Dynamika bryły sztywnej Moment siły, moment pędu i moment bezwładności. Aby spowodować ruch postępowy konieczne jest przyłożenie do ciała siły. Aby wprawić bryłę w ruch obrotowy wokół osi lub punktu niezbędne jest przyłożenie momentu siły: FrM
rrr×= , ⊥== rFrFM ϕsin . (6.1)
Warunkiem koniecznym wprowadzenia bryły sztywnej w ruch obrotowy jest istnienie w płaszczyźnie
obrotu niezerowej składowej ⊥F siły Fr
(Rys. 6.1.).
Rys. 6.1. Ilustracja do definicji momentu siły. Moment siły jest prostopadły do płaszczyzny wyznaczonej przez wektory rr
i F
r.
Prędkość ruchu obrotowego scharakteryzowana jest wektorem prędkości kątowej ωr . Wektor ten, podobnie jak każdy inny wektor, ma trzy przestrzenne składowe, co oznacza, że dowolny ruch obrotowy można rozłożyć na trzy niezależne obroty wokół osi zyx ,, : ],,[ zyx ωωωω =
r. (6.2)
⊥Fr
Fr
||Fr
ϕ
rr
O

35
Rys. 6.2. Ilustracja prędkości kątowej i momentu pędu bryły w ruchu obrotowym wokół osi. Moment pędu bryły obracającej się wokół osi wynosi: ωv
rIL = . (6.3)
W powyższym wyrażeniu I jest momentem bezwładności bryły względem osi obrotu określonym przez wyrażenie:
∫=m
dmrI 2 , (6.4)
gdzie m oznacza masę bryły, a dm jest elementem masy oddalonym od osi obrotu o r . Momenty bezwładności dla niektórych brył podano na Rys. 5.3.
Rys. 6.3. Momenty bezwładności niektórych brył obliczone względem osi przechodzących przez ich środki mas (linie przerywane).
Lr
],,[ zyx ωωωω =r
dm
rr
O
O
y
z
vr
S
x
2
5
2mrI =
r
2
10
3mrI =
hr
)(12
1 22 bamI +=
a
b
h
2
2
1mrI =
r
h
2
12
1mlI =
l
R2r2
)(2
1 22 RrmI +=
36
Druga zasada dynamiki dla ruchu obrotowego. Dla ruchu obrotowego, druga zasada dynamiki przyjmuje postać:
Mdt
Id
dt
Ld rrr
== )( ω. (6.5)
Jeżeli bryła nie zmienia geometrii, to przyłożenie momentu siły wprawia bryłę w ruch obrotowy jednostajnie przyspieszony. Jeżeli na bryłę sztywną nie działa żaden moment siły, to bryła się nie obraca lub obraca się ruchem obrotowym ze stałą prędkością kątową ωr , co oznacza między innymi, że podczas obrotu oś obrotu nie zmienia swojej orientacji w przestrzeni. Jeżeli na bryłę nie działa moment siły, a bryła może w trakcie obrotu zmieniać geometrię, to iloczyn constI =ωr . Energia kinetyczna ruchu obrotowego. Energia kinetyczna ruchu obrotowego wokół ustalonej osi wynosi:
2
2
1 ωIT = . (6.6)
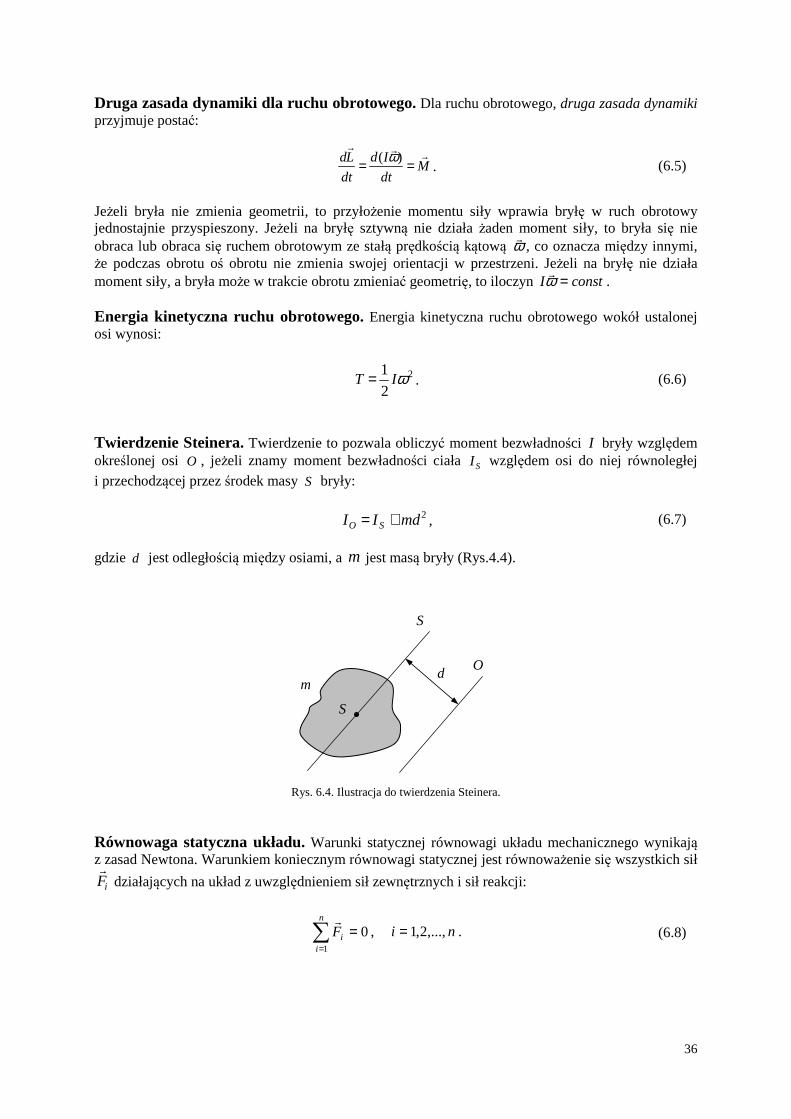
Twierdzenie Steinera. Twierdzenie to pozwala obliczyć moment bezwładności I bryły względem określonej osi O , jeżeli znamy moment bezwładności ciała SI względem osi do niej równoległej i przechodzącej przez środek masy S bryły:
2mdII SO += , (6.7)
gdzie d jest odległością między osiami, a m jest masą bryły (Rys.4.4).
Rys. 6.4. Ilustracja do twierdzenia Steinera. Równowaga statyczna układu. Warunki statycznej równowagi układu mechanicznego wynikają z zasad Newtona. Warunkiem koniecznym równowagi statycznej jest równoważenie się wszystkich sił
iFr
działających na układ z uwzględnieniem sił zewnętrznych i sił reakcji:
01
=∑=
n
iiFr
, ni ,...,2,1= . (6.8)
m
S
dO
S
37
Jeżeli warunek ten nie będzie spełniony, układ dozna przemieszczenia z pewnym przyspieszeniem. Z równania (5.8) wynika, że równowaga wszystkich sił musi zachodzić na każdym kierunku przestrzennym zyx ,, :
01
=∑=
n
iixF , 0
1
=∑=
n
iiyF , 0
1
=∑=
n
iizF . (6.9)
Warunek (6.8) nie zawsze jednoznacznie wyznacza równowagę statyczną układu. Czasami siły równoważą się, ale tworzą wypadkową parę sił, która mogłaby nadać układowi pewien ruch obrotowy. Warunkiem przeciwdziałającym takiemu ruchowi jest równoważenie się wszystkich momentów sił
iMr
:
01
=∑=
n
iiM
r, ni ,...,2,1= . (6.10)
Warunek (5.10) równoważny jest trzem zapisom skalarnym:
01
=∑=
n
iixM , 0
1
=∑=
n
iiyM , 0
1
=∑=
n
iizM . (6.11)
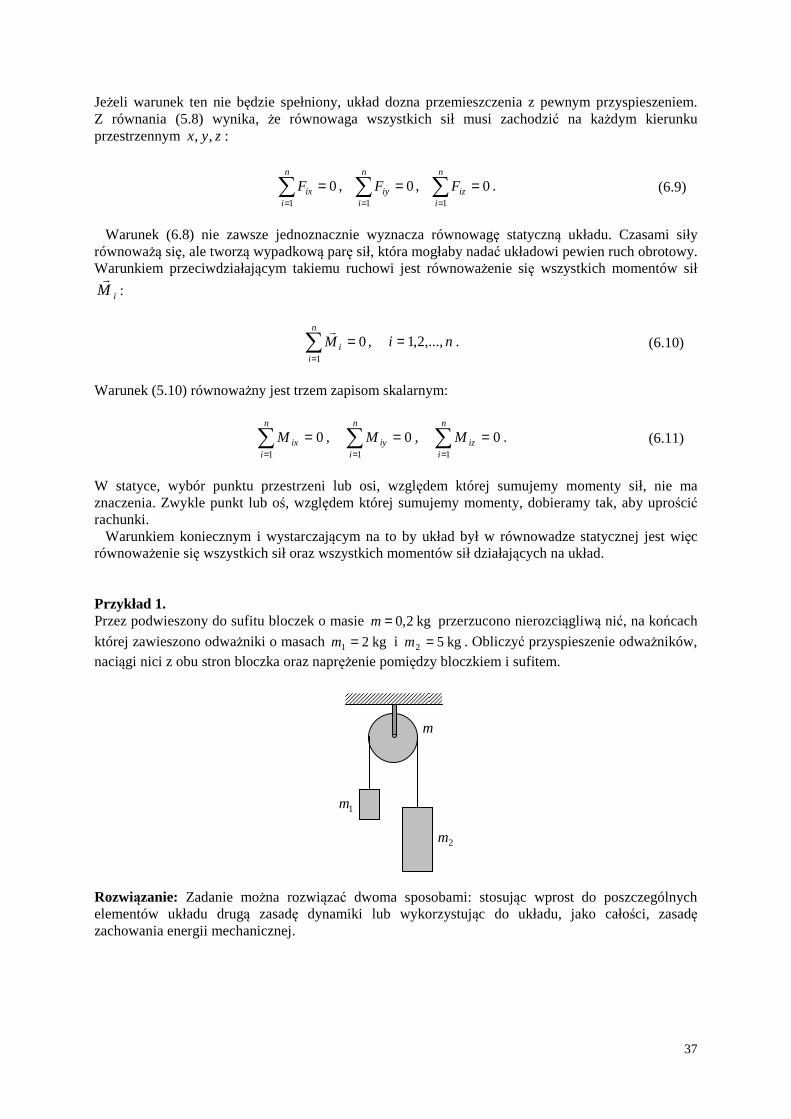
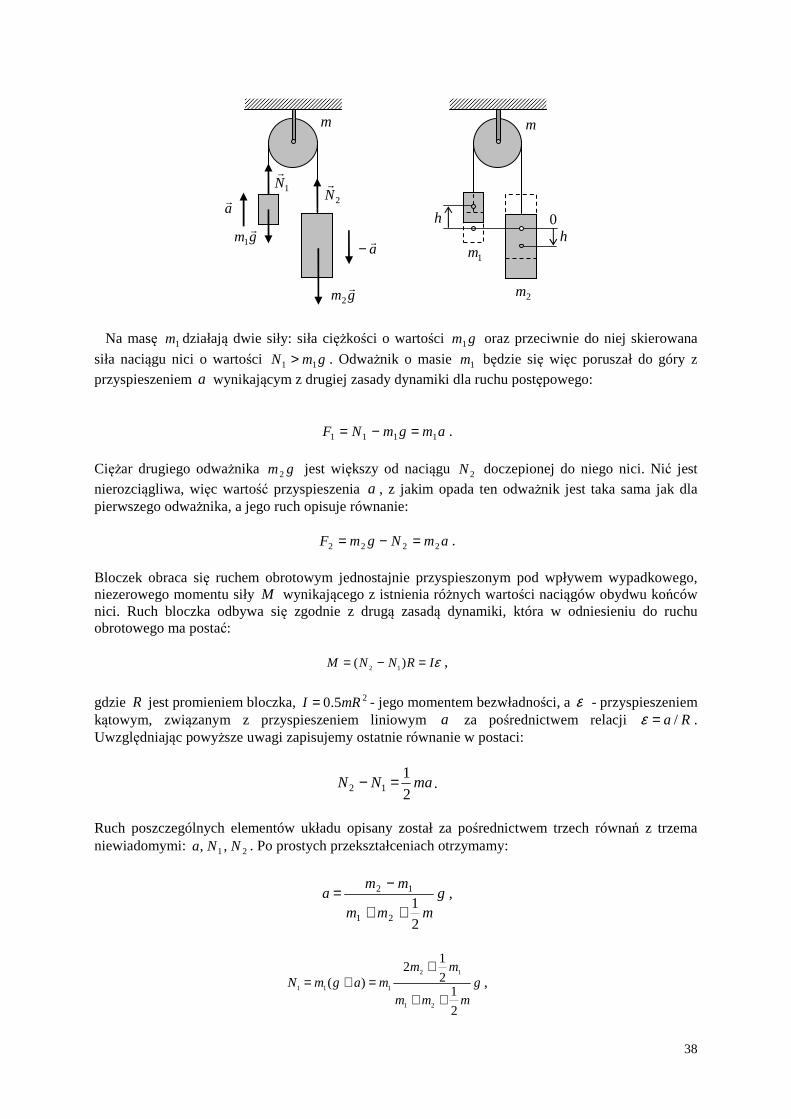
W statyce, wybór punktu przestrzeni lub osi, względem której sumujemy momenty sił, nie ma znaczenia. Zwykle punkt lub oś, względem której sumujemy momenty, dobieramy tak, aby uprościć rachunki. Warunkiem koniecznym i wystarczającym na to by układ był w równowadze statycznej jest więc równoważenie się wszystkich sił oraz wszystkich momentów sił działających na układ. Przykład 1. Przez podwieszony do sufitu bloczek o masie kg2,0=m przerzucono nierozciągliwą nić, na końcach
której zawieszono odważniki o masach kg21 =m i kg52 =m . Obliczyć przyspieszenie odważników, naciągi nici z obu stron bloczka oraz naprężenie pomiędzy bloczkiem i sufitem. Rozwiązanie: Zadanie można rozwiązać dwoma sposobami: stosując wprost do poszczególnych elementów układu drugą zasadę dynamiki lub wykorzystując do układu, jako całości, zasadę zachowania energii mechanicznej.
m
1m
2m
38
Na masę 1m działają dwie siły: siła ciężkości o wartości gm1 oraz przeciwnie do niej skierowana
siła naciągu nici o wartości gmN 11 > . Odważnik o masie 1m będzie się więc poruszał do góry z przyspieszeniem a wynikającym z drugiej zasady dynamiki dla ruchu postępowego: amgmNF 1111 =−= . Ciężar drugiego odważnika gm2 jest większy od naciągu 2N doczepionej do niego nici. Nić jest nierozciągliwa, więc wartość przyspieszenia a , z jakim opada ten odważnik jest taka sama jak dla pierwszego odważnika, a jego ruch opisuje równanie: amNgmF 2222 =−= . Bloczek obraca się ruchem obrotowym jednostajnie przyspieszonym pod wpływem wypadkowego, niezerowego momentu siły M wynikającego z istnienia różnych wartości naciągów obydwu końców nici. Ruch bloczka odbywa się zgodnie z drugą zasadą dynamiki, która w odniesieniu do ruchu obrotowego ma postać: εIRNNM =−= )( 12 , gdzie R jest promieniem bloczka, 25.0 mRI = - jego momentem bezwładności, a ε - przyspieszeniem kątowym, związanym z przyspieszeniem liniowym a za pośrednictwem relacji Ra /=ε . Uwzględniając powyższe uwagi zapisujemy ostatnie równanie w postaci:
maNN2
112 =− .
Ruch poszczególnych elementów układu opisany został za pośrednictwem trzech równań z trzema niewiadomymi: 21,, NNa . Po prostych przekształceniach otrzymamy:
g
mmm
mma
2
121
12
++
−= ,
gmmm
mmmagmN
2
12
12
)(
21
12
111
++
+=+= ,
gmr
1ar
−
ar 2N
r
gmr
2
m
1Nr
m
2m
1m
hh
0

39
gmmm
mmmagmN
2
12
12
)(
21
1
222
++
+=−= .
Naprężenie zawiesia pomiędzy bloczkiem, a sufitem wyznacza równanie:
gmmm
mmmmmmmgNNN
2
12
1)(
2
34
21
22121
21
++
+++=++= .
Podstawiając dane liczbowe znajdziemy: 2m/s4.15=a , N27.921 =N , N28.302 =N , N58.20=N Przykład 2. Jednorodna, sztywna belka o długości m5.1=L i ciężarze N400=Q wisi na dwóch linach zaczepionych do jej końców. Dwa pozostałe końce lin podczepione są do wspólnego zawiesia. Długość każdej z lin wynosi m4.1=l . Obliczyć naprężenia lin zakładając, że ich ciężar jest nieporównywalnie mniejszy od ciężaru belki. Rozwiązanie:
Na układ działają naprężenia nici 1Nr
, 2Nr
oraz ciężar belki Qr
. Warunek równowagi (5.8) przyjmie więc postać:
021 =++ NNQrrr
.
Warunek ten równoważny jest dwóm zapisom skalarnym (5.9): 00 21 =−+ xx NN ,
021 =++− yy NNQ .
Z pierwszego równania wynika, że xxx NNN ≡= 21 . Z symetrii zadania oraz z drugiego równania
wynika natomiast, że 2/21 QNNN yyy =≡= . Naprężenia lin muszą więc być takie same:
NNN == 21 . Z podobieństwa odpowiednich trójkątów (rysunek) wynika ponadto proporcja:
l l
1Nr
2Nr
2/L
Qr
xN1
r
xN2
ryN1
r
yN2
r
2/Lx
y
ir
jr

40
l
Ll
N
N y22 )2/(−
= .
Podstawiając w powyższym równaniu 2/QNy = znajdziemy:
224 Ll
QlN
−= .
Uwzględniając dane liczbowe otrzymamy: N236,8521 === NNN . Przykład 3. Jednorodna, metalowa belka o długości m5=L i masie kg100=m spoczywa na dwóch podporach. Punkty podparcia belki znajdują się: jeden na jednym jej końcu, a drugi w odległości m5.1=l od jej
drugiego końca. Obliczyć reakcje podpór. Przyspieszenie ziemskie 2m/s10=g . Rozwiązanie:
Na układ działają siły: ciężar belki Qr
oraz reakcje podpór 1Fr
i 2Fr
. Warunek równowagi sił (5.8) ma postać:
021 =++ FFQrrr
.
Ponieważ brak jest składowych sił wzdłuż osi x oraz z , więc równanie to możemy zapisać w postaci jednego równania skalarnego odniesionego do kierunku y : 021 =++− FFQ Jest to równanie z dwoma niewiadomymi 1F i 2F . Warunek ten jak widać nie wystarcza do znalezienia reakcji podpór. Aby znaleźć drugie równanie korzystamy z warunku (5.10) równoważenia się wszystkich momentów sił działających na układ:
021
=++ FFQ MMMrrr
gmQrr
=
S
2Fr
1Fr
kr
ir
jr
z
y
x

41
Jeżeli przyjmiemy, że punkt, względem którego liczymy momenty sił znajduje się w środku ciężkości
belkiS , to moment siły Qr
będzie równy zero, a momenty sił 1Fr
i 2Fr
będą odpowiednio równe:
kFL
kFrFrM F
rrrrr
111111 2sin
1−==×= ϕ , ( o2701 =ϕ ,
21L
r = ),
klL
kFrFrM F
rrrrr)
2(sin 222222
−==×= ϕ , ( o902 =ϕ , lL
r −=22 ).
Warunek równoważenia się momentów sił przyjmie więc postać:
022 21 =
−+− FlL
FL
.
Powyższe równanie jest drugim - brakującym równaniem pozwalającym na obliczenie reakcji podpór. Po prostych przekształceniach otrzymamy:
mglL
LFmg
lL
lLF
)(2,
)(2
221 −
=−
−= .
Uwzględniając dane liczbowe otrzymamy: N7,8521 =F , N3,7142 =F . Można sprawdzić, że rezultat ten pozostanie bez zmian, jeżeli momenty sił będą liczone względem innego, dowolnie wybranego punktu odniesienia.
7. Pole grawitacyjne Prawo powszechnego ciążenia. Dwie masy punktowe M i m przyciągają się wzajemnie siłą proporcjonalną do tych mas i odwrotnie proporcjonalną do kwadratu ich odległości, przy czym kierunek działania sił pokrywa się z kierunkiem prostej przechodzącej przez obydwa punkty. W zapisie wektorowym i skalarnym prawo to ma postać:
22,
r
MmGF
r
r
r
MmGF =−=
rr
, (7.1)
gdzie 2211 /kgNm1067,6 −⋅=G jest stałą grawitacji. Powyższy zapis jest także prawdziwy dla mas kulistych. Równanie (7.1) obowiązuje również dla mas o nieregularnych kształtach pod warunkiem, że wymiary takich ciał są nieporównywalnie mniejsze od dzielącej ich odległości r , utożsamianej w przypadku obiektów o skończonych gabarytach z odległością między środkami mas tych ciał.
2ϕ
2rr
2Fr
1rr
1Fr
1ϕS2Fr
1Fr
2rr
1rr
gmQrr
=

42
Rys. 7.1. Ilustracja do prawa powszechnego ciążenia. Natężenie pola grawitacyjnego. Jest to siłowy parametr charakteryzujący pole grawitacyjne towarzyszące masie M i zdefiniowane, jako siła oddziaływania tego pola na umieszczoną w nim jednostkową masę próbną:
r
r
r
MG
m
Frr
r
2−==γ . (7.2)
Linie sił pola grawitacyjnego, to z definicji krzywe, do których wektor γr jest styczny w każdym ich punkcie. Ciężar ciała i przyspieszenie ziemskie. Ciężarem ciała o masie m nazywamy siłę, z jaką Ziemia lub inne ciało niebieskie przyciąga tą masę na swojej powierzchni. Siła ta określona jest przez prawo powszechnego ciążenia (7.1) i w przypadku Ziemi wynosi:
mgR
mMGRrFF
Z
ZZ ====
2)( ,
2Z
Z
R
MGg = , (7.3)
gdzie ZM jest masą Ziemi, ZR - jej promieniem, a 29.81m/s=g - przyspieszeniem ziemskim.
Praca sił pola grawitacyjnego.
Rys. 7.2. Praca pola grawitacyjnego nie zależy od drogi przemieszczanego ciała.
Pole grawitacyjne jest polem zachowawczym. Praca sił pola grawitacyjnego wytworzonego przez masę M i przemieszczającego masę próbną m między dwoma punktami A i B tego pola nie zależy od kształtu drogi i wyraża się wzorem:
)11
(AB
BA rrGMmL −=→ , (7.4)
r
M
Fr m
Fr
−
)( ArFrr
Arr
A
B
M
m
)( BrFrr
Brr

43
gdzie Ar i Br oznaczają odległości punktów A i B od źródła pola. Powyższy wzór obowiązuje w przypadku pola o symetrii sferycznej. Dla jednorodnego pola grawitacyjnego, przy powierzchni Ziemi, praca ta zależy tylko od różnicy wysokości przemieszczanego przez to pole ciała: )( ABBA hhmgL −−=→ , (7.5) gdzie g jest przyspieszeniem ziemskim.
Energia potencjalna pola grawitacyjnego. Praca sił pola grawitacyjnego jest określona jednoznacznie, natomiast energia potencjalna pola określona jest z dokładnością do dowolnej stałej. W przypadku pola grawitacyjnego o symetrii sferycznej przyjmujemy zwykle, że energia potencjalna znika w nieskończoności. Przy takim założeniu energia potencjalna pola grawitacyjnego zależy tylko od odległości r od źródła pola i wynosi:
r
MmGrV −=)( . (7.6)
Porównując wyrażenia (6.4) i (6.6) widzimy, że energia potencjalna jest pracą, którą wykonuje pole grawitacyjne przemieszczając (po dowolnej drodze) umieszczoną w nim masę m od punktu wyznaczonego przez odległość r do nieskończoności. Dla jednorodnego pola grawitacyjnego przy powierzchni Ziemi: mghV = , (7.7) gdzie h jest wysokością nad pewnym określonym poziomem, dla którego przyjęto 0=V . Zasada zachowania energii w polu grawitacyjnym. Pole grawitacyjne jest polem zachowawczym, więc całkowita energia mechaniczna ciała o masie m umieszczonego w dowolnym punkcie tego pola odległego o r od jego źródła jest stała:
const2
1 2 =−=+=r
MmGmvVTE . (7.8)
Dla jednorodnego pola grawitacyjnego przy powierzchni Ziemi zasada ta ma postać:
const2
1 2 =+=+= mghmvVTE . (7.9)
Pierwsza prędkość kosmiczna. Jest to najmniejsza prędkość, jaką należy nadać ciału względem przyciągającego je ciała niebieskiego, aby ciało to poruszało się po zamkniętej orbicie i stało się satelitą ciała niebieskiego. Dla planety o kształcie kuli, orbita ta jest orbitą kołową o promieniu równym promieniowi planety. Dla Ziemi, pierwsza prędkość kosmiczna wyrażona jest wzorem:
s
km91.71 === Z
z
Z gRR
GMv . (7.10)
Druga prędkość kosmiczna. Jest to tzw. prędkość ucieczki, tj. prędkość, jaką należy nadać ciału, aby opuściło ono na zawsze pole grawitacyjne ciała niebieskiego i poruszało się dalej ruchem swobodnym z całkowitą energią równą zeru. Dla Ziemi, druga prędkość kosmiczna wynosi:
44
s
km2.112
22 === Z
z
Z gRR
GMv (7.11)
Trzecia prędkość kosmiczna, to prędkość potrzebna do opuszczenia Układu Słonecznego
( 7.163 =v km/s).
Czwartą prędkość kosmiczną należy nadać ciału by opuściło Galaktykę ( 1304 =v km/s).
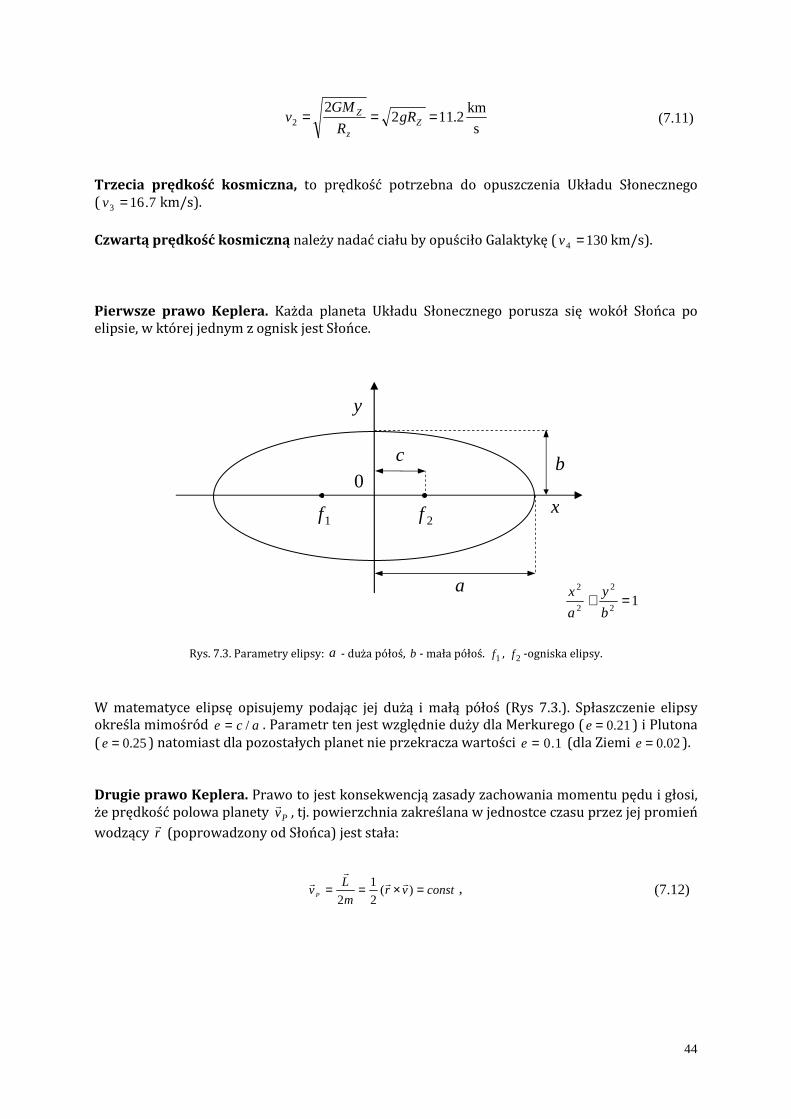
Pierwsze prawo Keplera. Każda planeta Układu Słonecznego porusza się wokół Słońca po
elipsie, w której jednym z ognisk jest Słońce.
Rys. 7.3. Parametry elipsy: a - duża półoś, b - mała półoś. 1f , 2f -ogniska elipsy.
W matematyce elipsę opisujemy podając jej dużą i małą półoś (Rys 7.3.). Spłaszczenie elipsy
określa mimośród ace /= . Parametr ten jest względnie duży dla Merkurego ( 21.0=e ) i Plutona
( 25.0=e ) natomiast dla pozostałych planet nie przekracza wartości 1.0=e (dla Ziemi 02.0=e ).
Drugie prawo Keplera. Prawo to jest konsekwencją zasady zachowania momentu pędu i głosi,
że prędkość polowa planety Pvr
, tj. powierzchnia zakreślana w jednostce czasu przez jej promień
wodzący rr
(poprowadzony od Słońca) jest stała:
constvrm
LvP =×== )(
2
1
2
rrr
r , (7.12)
12
2
2
2
=+b
y
a
x
0
a
1fx
y
b
2f
c

45
gdzie Lr
jest momentem pędu planety o masie m i prędkości liniowej vr
. Z prawa tego wynika,
że w perihelium prędkość planety jest większa od prędkości w aphelium.
Rys. 7.4. Ilustracja drugiego prawa Keplera.
Trzecie prawo Keplera. Stosunek sześcianu dużej półosi orbity do kwadratu okresu obiegu
planety dookoła Słońca jest stały dla wszystkich planet Układu Słonecznego:
const2
3
=T
a. (7.13)
Przykład 1. Okres obiegu dookoła Słońca jest więc dłuższy dla planet bardziej od Słońca odległych.
Satelita o masie kg1000=m okrążał Ziemię po orbicie kołowej w odległości km9001 =h od powierzchni Ziemi. Satelita ten został przeniesiony na orbitę eliptyczną, na której jego odległość od powierzchni Ziemi w perigeum pozostała taka sama, a w apogeum była równa km180002 =h . Obliczyć: 1. okres obiegu 1T oraz prędkość 1v satelity krążącego wokół Ziemi po pierwotnej orbicie kołowej,
2. okres obiegu 2T oraz prędkości satelity w perigeum pv i apogeum av po przeniesieniu na orbitę
eliptyczną, 3. ilość energii niezbędnej do przeniesienia satelity z orbity kołowej na orbitę eliptyczną.
Promień Ziemi km6370=ZR , przyspieszenie ziemskie 2m/s 81.9=g . Rozwiązanie:
AP
2h1h
ZR
constvrvP =×= )(2
1 rrr
Lr
m
vr
rr
S
1fAph
Fr
2fPh

46
1. Na satelitę poruszającego się wokół Ziemi działa tylko siła grawitacyjnego przyciągania, która jest siłą dośrodkową:
DSG FF = , 1
2
1
2
1)( hR
mv
hR
mMG
ZZ
Z
+=
+.
W równaniu tym występuje nieznana wartość stałej grawitacji G oraz masy Ziemi ZM . Iloczyn obydwu tych wielkości znajdziemy wychodząc z definicji przyspieszenia ziemskiego g , tj. przyspieszenia, jakiego doznaje każde ciało przy powierzchni Ziemi:
mgR
mMG
Z
Z =2
, 2ZZ gRGM = .
Uwzględniając powyższe relację otrzymamy:
2/1
1
1 )(hR
gRv
Z
Z += ,
2/1
2/3
1
1
11
)(2)(2
gR
hR
v
hRT
Z
ZZ +=+= ππ.
Po podstawieniu danych liczbowych znajdziemy: m/s74001 =v , s61701 =T . 2. Okres obiegu satelity po orbicie eliptycznej obliczymy z trzeciego prawa Keplera odniesionego do ruchu satelity po orbitach okołoziemskich. Dla rozważanej orbity kołowej i eliptycznej prawo to przyjmie postać:
2
2
2
1
3
21
3
1
3
2
3
1
]2/)2[(
)(
T
T
hhR
hR
a
a
Z
Z =++
+= ,
gdzie 1a i 2a są dużymi półosiami odpowiednio pierwotnej orbity kołowej, równej promieniowi tej
orbity, oraz orbity eliptycznej. Uwzględniając obliczony w punkcie pierwszym okres 1T otrzymamy:
2/1
2/3
212 )2(
)2(
g
hhR
RT Z
Z
++= π.
Związek między prędkością satelity w perigeum i apogeum otrzymamy z drugiego prawa Keplera. W obydwu punktach orbity eliptycznej wektor wodzący satelity (o początku w środku masy Ziemi) jest prostopadły do wektora prędkości i skalarny zapis równania (6,12) przyjmuje postać: aZpZ vhRvhR )()( 21 +=+ . Jest to równanie o dwóch niewiadomych. Brakujące równanie otrzymamy z zasady zachowania energii. Ruch satelity odbywa się w polu zachowawczym, więc całkowita energia mechaniczna satelity w dowolnym punkcie orbity eliptycznej jest taka sama. Porównując całkowitą energię (6.8) w perigeum i apogeum orbity eliptycznej otrzymamy:
2
2
1
2
2
1
2
1
hR
mMGmv
hR
mMGmv
Z
Za
Z
Zp +
−=+
− , 2ZZ gRGM = .
Rozwiązując otrzymany układ równań znajdziemy:

47
2/1
121
2
))(2(
)(2
++++=
hRhhR
hRgRv
ZZ
ZZp ,
2/1
221
1
))(2(
)(2
++++=
hRhhR
hRgRv
ZZ
ZZa .
Uwzględniając dane liczbowe otrzymamy: s19806T2 = , m/s9184=pv , m/s7402=av .
3. Całkowita energia mechaniczna satelity na orbicie kołowej wynosi:
1
2
1
211 2
1
2
1
hR
Rmg
hR
mMGmvE
Z
Z
Z
Z
+−=
+−= .
Całkowitą energia na orbicie eliptycznej jest równa całkowitej energii mechanicznej w dowolnym punkcie orbity. Przyjmując, że punktem tym jest perigeum znajdziemy:
21
2
1
22 22
1
hhR
Rmg
hR
mMGmvE
Z
Z
Z
Zp ++
−=+
−= .
Ilość energii niezbędnej do przeniesienia satelity z orbity kołowej na orbitę eliptyczną
))(2(2
)(
121
12
2
12 hRhhR
hhRmgEEE
ZZ
Z
+++−=−=∆ .
Podstawiając dane liczbowe otrzymamy GJ14,8=∆E . Przykład 2. Promień Ziemi wynosi mR 61037,6 ⋅= . Przyjmując przyspieszenie grawitacyjne na powierzchni
Ziemi 2
81,9s
mg = oraz zakładając, że jej średnia gęstość
33104,5
m
kg⋅=ρ wyznaczyć wartość stałej
grawitacji.
Stosujemy prawo powszechnego ciążenia do ciała o masie mznajdującego się na powierzchni Ziemi.
2R
MmGF = (1)
gdzie: M oznacza masę Ziemi, a R jej promień. Zgodnie z drugą zasadą dynamiki
mgR
MmG =
2 stąd
M
gRG
2
= (2)
Zakładając, że Ziemia jest kulą i korzystając z definicji gęstości
33/4 R
M
V
M
πρ == (3)
wyznaczamy masę Ziemi
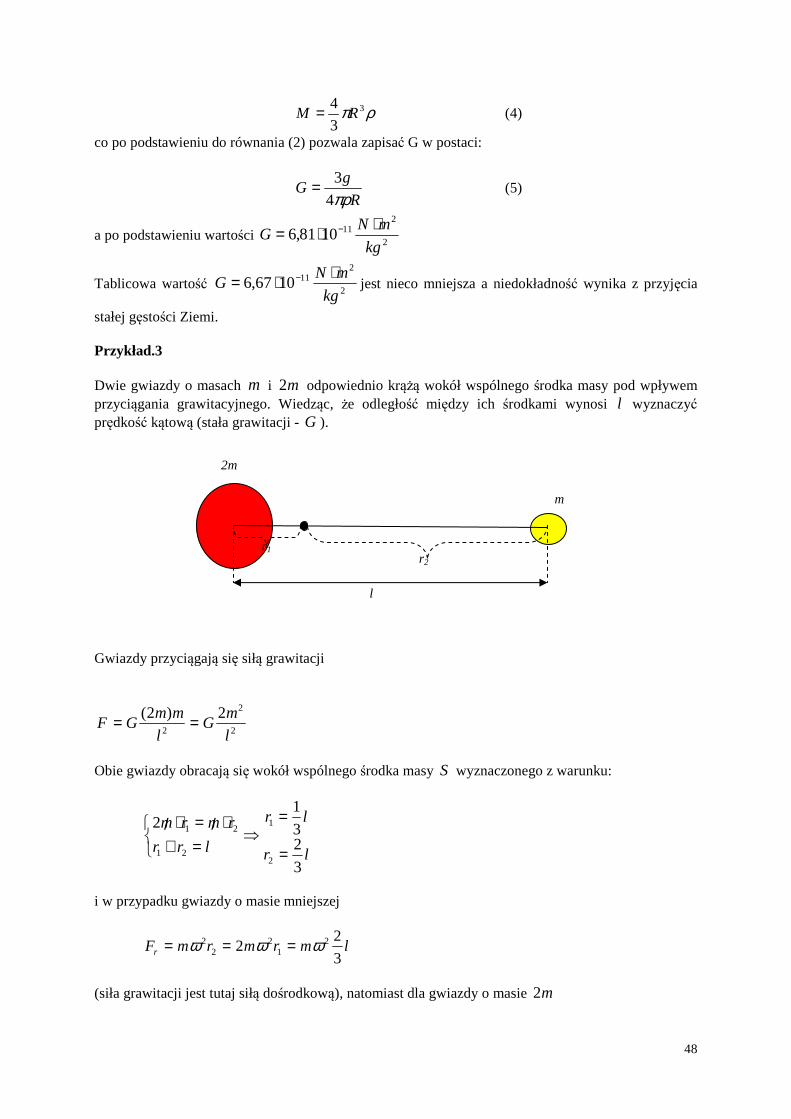
48
ρπ 3
3
4RM = (4)
co po podstawieniu do równania (2) pozwala zapisać G w postaci:
R
gG
πρ4
3= (5)
a po podstawieniu wartości 2
2111081,6
kg
mNG
⋅⋅= −
Tablicowa wartość 2
2111067,6
kg
mNG
⋅⋅= − jest nieco mniejsza a niedokładność wynika z przyjęcia
stałej gęstości Ziemi. Przykład.3 Dwie gwiazdy o masach m i m2 odpowiednio krążą wokół wspólnego środka masy pod wpływem przyciągania grawitacyjnego. Wiedząc, że odległość między ich środkami wynosi l wyznaczyć prędkość kątową (stała grawitacji - G ).
Gwiazdy przyciągają się siłą grawitacji
2
2
2
2)2(
l
mG
l
mmGF ==
Obie gwiazdy obracają się wokół wspólnego środka masy S wyznaczonego z warunku:
=+⋅/=⋅/
lrr
rmrm
21
212⇒
lr
lr
3
23
1
2
1
=
=
i w przypadku gwiazdy o masie mniejszej
lmrmrmFr 3
22 2
12
22 ωωω ===
(siła grawitacji jest tutaj siłą dośrodkową), natomiast dla gwiazdy o masie m2
2m
m
l
r1 r2
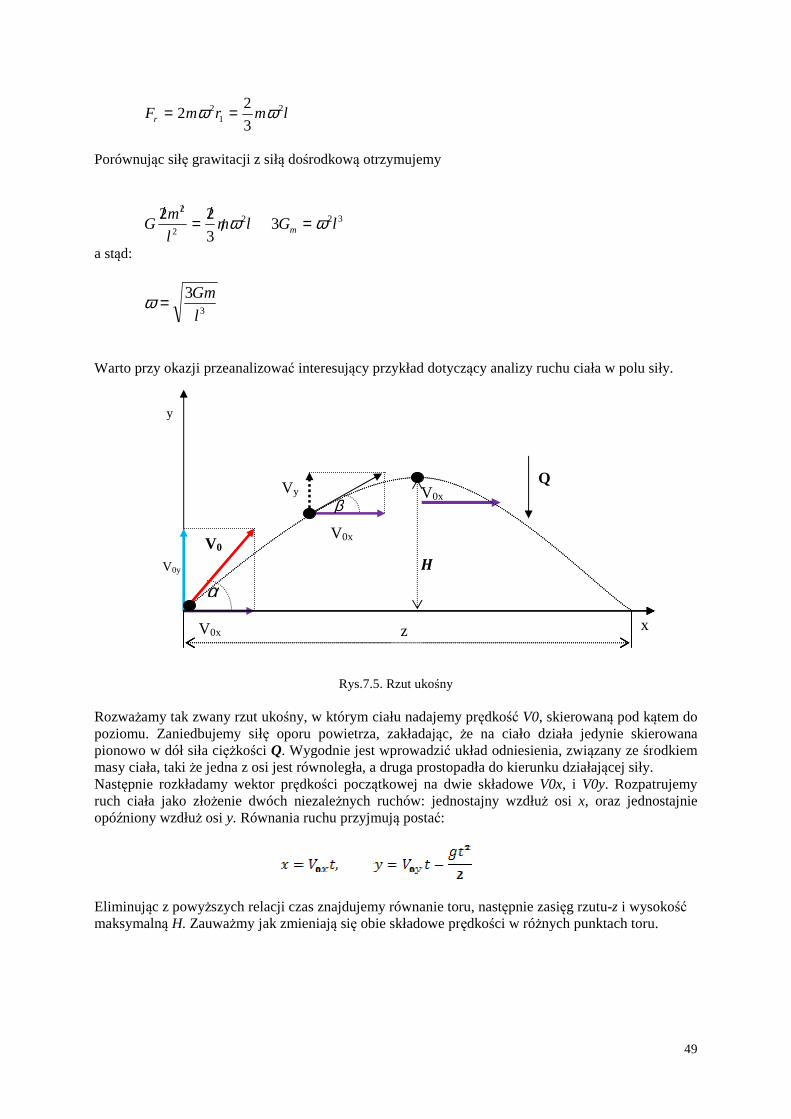
lmrmFr2
12
3
22 ωω ==
Porównując siłę grawitacji z siłą do
lml
mG 2
2
2
3
22 ω//=/ /
3G
a stąd:
3
3
l
Gm=ω
Warto przy okazji przeanalizować
Rozważamy tak zwany rzut ukośpoziomu. Zaniedbujemy siłę oporu powietrza, zakładajpionowo w dół siła ciężkości Q. Wygodnie jest wprowadzimasy ciała, taki że jedna z osi jest równoległa, a druga prostopadła do kierunku działajNastępnie rozkładamy wektor pręruch ciała jako złożenie dwóch niezaleopóźniony wzdłuż osi y. Równania ruchu przyjmuj
Eliminując z powyższych relacji czas znajdujemy równanie toru, nastmaksymalną H. Zauważmy jak zmieniaj
V0
V0x
α
V
V0y
y
l
grawitacji z siłą dośrodkową otrzymujemy
32lGm ω=
Warto przy okazji przeanalizować interesujący przykład dotyczący analizy ruchu ciała w polu siły.
Rys.7.5. Rzut ukośny
ut ukośny, w którym ciału nadajemy prędkość V0, skierowanę oporu powietrza, zakładając, że na ciało działa jedynie skierowana
. Wygodnie jest wprowadzić układ odniesienia, zwie jedna z osi jest równoległa, a druga prostopadła do kierunku działaj
pnie rozkładamy wektor prędkości początkowej na dwie składowe V0x, i enie dwóch niezależnych ruchów: jednostajny wzdłuż osi
Równania ruchu przyjmują postać:
szych relacji czas znajdujemy równanie toru, następnie zasięg rzutumy jak zmieniają się obie składowe prędkości w różnych punktach toru.
z
V0x
V0x β
Vy Q
H
49
cy analizy ruchu ciała w polu siły.
, skierowaną pod kątem do e na ciało działa jedynie skierowana
układ odniesienia, związany ze środkiem e jedna z osi jest równoległa, a druga prostopadła do kierunku działającej siły.
, i V0y. Rozpatrujemy osi x, oraz jednostajnie
ęg rzutu-z i wysokość nych punktach toru.
x

50
8. Drgania Ruchem drgającym okresowym nazywamy taki ruch, w którym układ po upływie pewnego czasu, nazywanego okresem drgania, wraca do stanu wyjściowego. Drganie harmoniczne proste. W ujęciu geometrycznym drganie harmoniczne proste to ruch, jaki wykonuje rzut punktu poruszającego się po okręgu na średnicę tego okręgu (Rys. 8.1).
Rys. 8.1. Ilustracja do definicji geometrycznej drgania harmonicznego prostego. Drganie harmoniczne proste jest drganiem o stałej w czasie amplitudzie. Równanie opisujące drganie harmoniczne proste przedstawia zależność wychylenia )(tx drgającego punktu P z położenia równowagi 0 w funkcji czasu t (Rys. 8.2): )cos()( 000 ϕω += tAtx , (8.1) gdzie: • 0A - amplituda drgania (maksymalne wychylenie z położenia równowagi),
• 000 /2/2 fT ππω == - częstość kołowa drgania,
• 0T - okres drgania,
• 00 /1 Tf = - częstotliwość drgania,
• 00)( ϕωϕ += tt - faza drgania,
• )0(0 == tϕϕ - faza początkowa drgania.
Rys. 8.2. Zależność wychylenia drgającego punktu z położenia równowagi od czasu w drganiu harmonicznym prostym.
)(tx
0A
0T t
0A−
0
P′
ϕ P 0A
x)(tx0
0A−0A

51
W ujęciu matematycznym drganie harmoniczne proste to ruch opisany równaniem:
0202
2
=+ xdt
xd ω . (8.2)
Rozwiązaniem tego równania jest funkcja (8.1). Z równania (8.2) wynika fizyczna definicja drgania harmonicznego prostego: jest to taki ruch, który wykonuje punkt materialny o masie m pod wpływem siły sprężystej (elastycznej) sF , proporcjonalnej do wychylenia x i przeciwnie do tego wychylenia skierowanej: kxFs −= , 2
0ωmk = , (8.3) gdzie k jest dodatnim współczynnikiem sprężystości określającym częstość kołową oraz okres drgań własnych układu:
m
k=0ω , k
mT π20 = . (8.4)
Energia drgania harmonicznego prostego. Siły sprężyste są siłami zachowawczymi. Energia kinetyczna i potencjalna drgającego układu zmieniają się w czasie, natomiast całkowita energia mechaniczna pozostaje wielkością stałą:
)(sin2
1
2
100
22
0
2
0
2 ϕωω +== tmAmvEkin, 8.5)
)(cos2
1
2
100
22
0
2
0
2 ϕωω +== tmAkxE pot, (8.6)
constmAEEE potkinc ==+= 20
202
1 ω . (8.7)
Wahadło fizyczne i wahadło matematyczne. Przy pomijalnych stratach energii związanych z tarciem i oporami środowiska, wahadło fizyczne i wahadło matematyczne jest przykładem ciała wykonującego drganie harmoniczne proste (Rys. 8.3).
Rys. 8.3. Wahadło fizyczne (a) i wahadło matematyczne (b). O – punkt zawieszenia, S- środek masy.
)(a
S
gmQrr
=
O
α
lr
O
α
lr
S
gmQrr
=
)(b
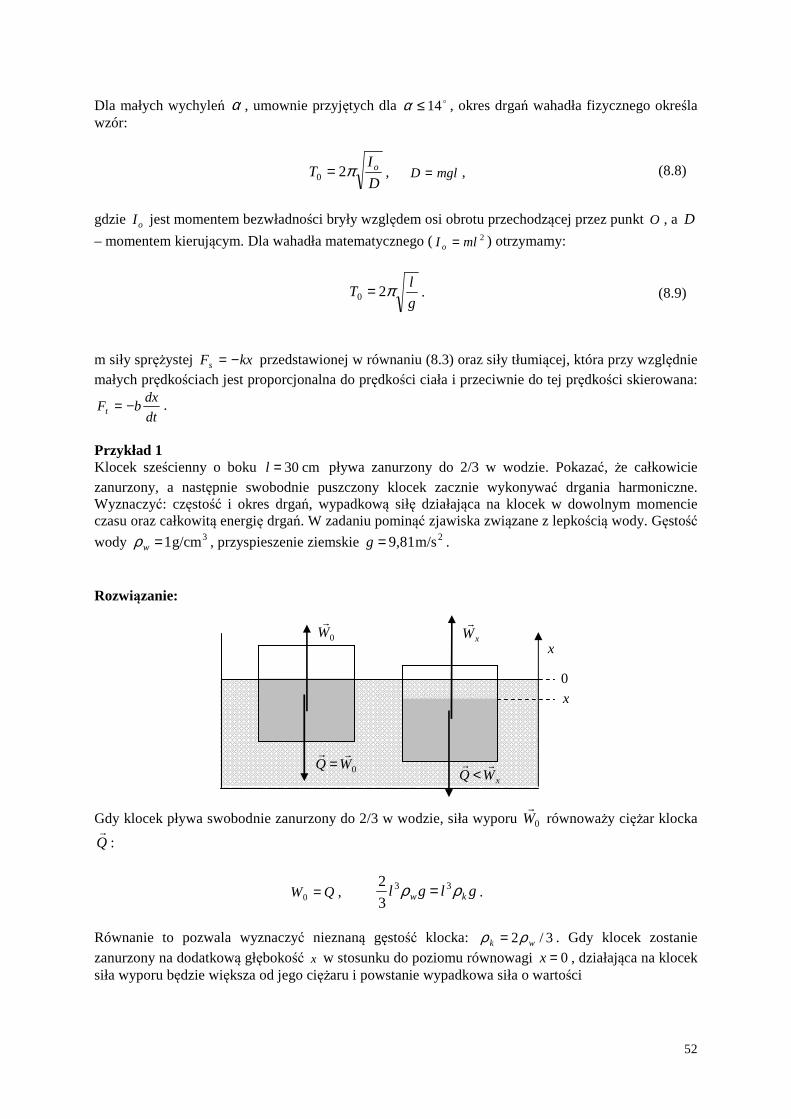
52
Dla małych wychyleń α , umownie przyjętych dla o14≤α , okres drgań wahadła fizycznego określa wzór:
D
IT oπ20 = , mglD = , (8.8)
gdzie oI jest momentem bezwładności bryły względem osi obrotu przechodzącej przez punkt O , a D
– momentem kierującym. Dla wahadła matematycznego ( 2mlI o = ) otrzymamy:
g
lT π20 = . (8.9)
m siły sprężystej kxFs −= przedstawionej w równaniu (8.3) oraz siły tłumiącej, która przy względnie małych prędkościach jest proporcjonalna do prędkości ciała i przeciwnie do tej prędkości skierowana:
dt
dxbFt −= .
Przykład 1 Klocek sześcienny o boku cm30=l pływa zanurzony do 2/3 w wodzie. Pokazać, że całkowicie zanurzony, a następnie swobodnie puszczony klocek zacznie wykonywać drgania harmoniczne. Wyznaczyć: częstość i okres drgań, wypadkową siłę działająca na klocek w dowolnym momencie czasu oraz całkowitą energię drgań. W zadaniu pominąć zjawiska związane z lepkością wody. Gęstość
wody 3g/cm1=wρ , przyspieszenie ziemskie 2m/s9,81=g . Rozwiązanie:
Gdy klocek pływa swobodnie zanurzony do 2/3 w wodzie, siła wyporu 0Wr
równoważy ciężar klocka
Qr
:
QW =0 , glgl kw ρρ 33
3
2 = .
Równanie to pozwala wyznaczyć nieznaną gęstość klocka: 3/2 wk ρρ = . Gdy klocek zostanie zanurzony na dodatkową głębokość x w stosunku do poziomu równowagi 0=x , działająca na klocek siła wyporu będzie większa od jego ciężaru i powstanie wypadkowa siła o wartości
xWQrr
<
0Wr
x
0
xWr
0WQrr
=
x

53
xglglglxlQWF wkwx ρρρ 232
3
2 =−
+=−= .
Siła ta jest proporcjonalna do przyrostu zanurzenia x i jest zorientowana do niego przeciwnie:
kxF −= , 02 >= glk wρ .
Porównując otrzymane wyrażenie z równaniem (7.3) widzimy, że działająca na klocek siła ma formalną postać siły sprężystej. Swobodnie puszczony klocek zacznie więc wykonywać drgania harmoniczne, a przyrost zanurzenia x w funkcji czasu będzie opisany równaniem (7.1):
)cos()( 000 ϕω += tAtx , lA3
10 = , πϕ =0 ,
gdzie częstość kołowa oraz okres drgań klocka odpowiednio wynoszą
2/12/1
3
22/1
0 2
3
=
=
=l
g
l
gl
m
k
k
w
ρρω ,
2/1
0 3
22
=
g
lT π .
Wartość amplitudy 0A oraz fazy początkowej 0ϕ wynika z przyjętego założenia, że w umownym momencie 0=t , przyrost zanurzenia klocka wynosił 3/)0( Ltx −== . Poszukiwaną, wypadkową siłę działająca na klocek w dowolnym momencie czasu opisuje funkcja:
)0,7(cos29,882
3cos
3
12/1
3 ttl
gglkxF w ⋅=
+
−=−= πρ .
Całkowitą energię drgań klocka przedstawia równanie (7.7):
420
20 6
1
2
1glmAE wc ρω == .
Uwzględniając dane liczbowe otrzymamy: rad/s7,00 =ω , s0,900 =T , J13,2=cE . Przykład.2 Dwie sprężyny o stałych sprężystości N/m 1301 =k i N/m 702 =k połączone są z blokiem o masie
kg 2,0=m . Przy napiętych sprężynach blok przesunięto z położenia równowagi o cm150 =x i w chwili 0=t swobodnie puszczono. Za pomocą przyrządu pomiarowego stwierdzono, że amplituda drgań zmalała do połowy w ciągu czasu równego 75=n pierwszym okresom drgania. Obliczyć: 1. stałą sprężystości sprężyny, częstość kołową i okres drgań swobodnych (nietłumionych), 2. częstość kołową i okres drgań tłumionych oraz współczynnik tłumienia, 3. wypadkową siłę działająca na blok w dowolnym momencie czasu,

54
Rozwiązanie: 1. W dowolnym położeniu bloku, zmiana długości x każdej sprężyny jest taka sama, a obydwie siły działające na blok są zorientowane zgodnie i w przeciwnym kierunku do jego wychylenia x z położenia równowagi. Ruch bloku odbywa się więc pod wpływem wypadkowej siły xkkxkxkFFF )( 212121 +−=−−=+= . Siła F jest również siłą sprężystą, a stała sprężystości sprężyny 21 kkk += . Częstość kołową 0ω i
okres drgań swobodnych 0T wyznacza relacja (7.4) :
2/1
212/1
0
+=
=m
kk
m
kω , 2/1
210 2
+=
kk
mT π .
Po podstawieniu danych liczbowych znajdziemy: N/m200=k , 10 s31,623 −=ω s0,199T0 = .
2. Zależność czasową amplitudy A określa wyrażenie: teAtA β−= 0)( , gdzie β jest współczynnikiem tłumienia środowiska. Z warunków zadania wynika, że
nTexx
nTtA β−=== 00
2)( , 2ln=Tnβ ,
gdzie T jest okresem drgania tłumionego. Równanie to - wraz z relacją (7.11) na częstość kołową ω drgania tłumionego
220
2 βωπω −==T
umożliwia wyznaczenie poszukiwanych wielkości βω ,,T :
2/1
222
21
)42(ln2
++=
mn
kkn
ππω ,
0
2Fr
1Fr
x
1k 2k
m
x

55
2/1
21
222 )42(ln12
++==
kk
mn
nT
πωπ
,
2/1
222
21
)42(ln2ln
++=
mn
kk
πβ .
Uwzględniając dane liczbowe otrzymamy: 1623,31 −= sω , sT 199,0= , 10465,0 −= sβ . W przypadku
słabego tłumienia, zdefiniowanego przez warunek 1<<Tβ , 0ωω ≈ , 0TT ≈ . W omawianym zadaniu
1009,0 <<=Tβ i obliczone wartości ω i T są w obrębie stosowanej dokładności obliczeń takie same,
jak odpowiednie wartości 0ω i 0T dla drgania nietłumionego. 3. Siłę działającą na blok określa równanie: )cos()()()( 021 ϕωβ ++−=−= − texkktkxtF t . Z warunków zadania wynika, że w chwili 0=t wychylenie bloku ( ) 00 xtx == , więc faza początkowa
0=ϕ . Po podstawieniu danych liczbowych otrzymamy: )623,31cos(30)( 0465,0 tetF t−−= . Przykład 3. Wyprowadzić wzór na okres drgań wahadła matematycznego, korzystając z definicji siły harmonicznej.
W położeniu równowagi trwałej (punkt O ) siła ciężkości jest zrównoważona przez siłę
naprężenia nici N. Jeżeli teraz wychylimy masę m z położenia równowagi o kąt . ciężar ciała nie ulegnie zmianie, ale jest to pozycja wymuszona(nietrwała). Rozkład sił pokazany jest na rysunku poniżej; ciężar ciała rozkładamy na dwie składowe wzdłuż nici siła P, która jest równoważona przez siłę naprężenia nici N1 Usunięcie siły zewnętrznej wymuszającej powoduje ruch masy m w kierunku położenia równowagi. Siłę F możemy wyznaczyć z prostej relacji trygonometrycznej: = 356.. Z drugiej strony: 56. = .
Sα l
N
gmQ rr=
Qr PF Aα
hi
B Ox

56
Gdzie x jest wychyleniem natomiast l długością wahadła. Uwzględniając powyższą relację możemy zapisać siłę F jako: = −+ . Jest więc ona typową siłą harmoniczną (znak minus wynika z faktu, że siła ma przeciwny zwrot do wychylenia) i możemy skorzystać z równania definiującego siłę harmoniczną: = −m = −R. Porównując uzyskane wyrażenie na siłę F z równaniem siły harmonicznej otrzymujemy relację: −+ == −R. Skąd możemy wyznaczyć częstość drgań wahadła matematycznego:
R = F+, lub okres drgań:
( = 2no+. Jak wynika z powyższego równania okres drgań wahadła matematycznego zależy jedynie od jego długości, oraz przyśpieszenia grawitacyjnego w danym punkcie. Trzeba jednak podkreślić, że uzyskane równanie jest równaniem przybliżonym, słusznym jedynie dla niewielkich kątów wychyleń (do kilkunastu stopni). Wynika to z milczącego założenia, że wychylenie x jest równe odcinkowi, a nie łukowi AO- rysunek. Jednak dla małych kątów jest to przybliżenie wystarczająco dobre (cięciwa jest równa łukowi, na którym jest oparta). 9.Fale Fala jest rozchodzącym się w przestrzeni ruchem drgającym. Gdy dowolny punkt środowiska - źródło ruchu falowego - zostanie wytrącony z położenia równowagi i zacznie wykonywać ruch drgający, to wskutek istnienia sprężystości lub sztywności postaci środowiska, drganie to rozchodzi się we wszystkich możliwych kierunkach doprowadzając do powstania ruchu drgającego dowolnego, innego punktu tego środowiska. W ciałach wykazujących sprężystość postaci, tj. w ciałach stałych, cieczach i gazach możliwe jest rozchodzenie się fal podłużnych, w których drgania cząsteczek środowiska zachodzą na kierunku propagacji fali. W ciałach stałych, które wykazują także sztywność postaci, mogą rozchodzić się fale poprzeczne, w których drgania cząsteczek środowiska zachodzą na kierunku prostopadłym do kierunku propagacji fali. Ruch falowy ma unikalną zdolność transportu energii bez transportu masy. Fala harmoniczna płaska.
Rys. 9.1. Ilustracja do opisu fali harmonicznej płaskiej.
zzλ
vr
0
),( tzx
0A−
0A),( tzx

57
Jest to fala o określonym kierunku propagacji i stałej amplitudzie, wygenerowana przez drganie harmoniczne proste. Równanie opisujące tą falę przedstawia zależność wychylenia dowolnego punktu środowiska z położenia równowagi od położenia i czasu:
+
−= 000 cos),( ϕωv
ztAtzx , (9.1)
gdzie: • ),( tzx - wychylenie drgającego punktu z środowiska z położenia równowagi w momencie t . Czas t
jest całkowitym czasem drgania źródła ruchu falowego, zlokalizowanego tutaj w położeniu 0=z , • 0A - amplituda fali równa amplitudzie drgania harmonicznego prostego,
• 000 2/2 fT ππω == - częstość kołowa fali równa częstości kołowej drgania harmonicznego prostego
o okresie 0T i częstotliwości 0f ,
• v - prędkość fazowa fali,
• 00 ϕωϕ +
−=v
zt - faza fali,
• 0ϕ - faza początkowa fali.
Prędkość fazowa fali. Jest to prędkość rozprzestrzeniania się fazy fali, tj. prędkość, z jaką musiałby poruszać się obserwator by natrafić na tą samą fazę fali i rejestrować niezmienne wychylenie x drgających cząsteczek środowiska z położenia równowagi. Prędkość fazową fali określa warunek:
tv
zt cons00 =+
−= ϕωϕ , (9.2)
z którego, po zróżniczkowaniu, wynika naturalny wniosek, że dt
dzv = . Prędkość rozchodzenia się fali
sprężystej określa wzór Newtona:
ρM
v = , (9.3)
gdzie M jest modułem ściśliwości (fala podłużna) lub modułem sztywności (fala poprzeczna), a ρ jest gęstością środowiska. Długość fali. Długością fali określamy dystans pokonany przez czoło fali w czasie jednego pełnego okresu: 0vT=λ . Równoważna definicja określa długość fali, jako odległość między dwoma drgającymi punktami środowiska różniącymi się w fazie o π2 : jeżeli πϕϕ 2),(),( 21 =− tztz , to λ=− 12 zz . (9.4) Zasada superpozycji. Zasada superpozycji głosi, że jeżeli do jakiegoś punktu środowiska dociera kilka ciągów fal, to punkt ten doznaje wychylenia będącego sumą wychyleń pochodzących od poszczególnych ciągów fal.
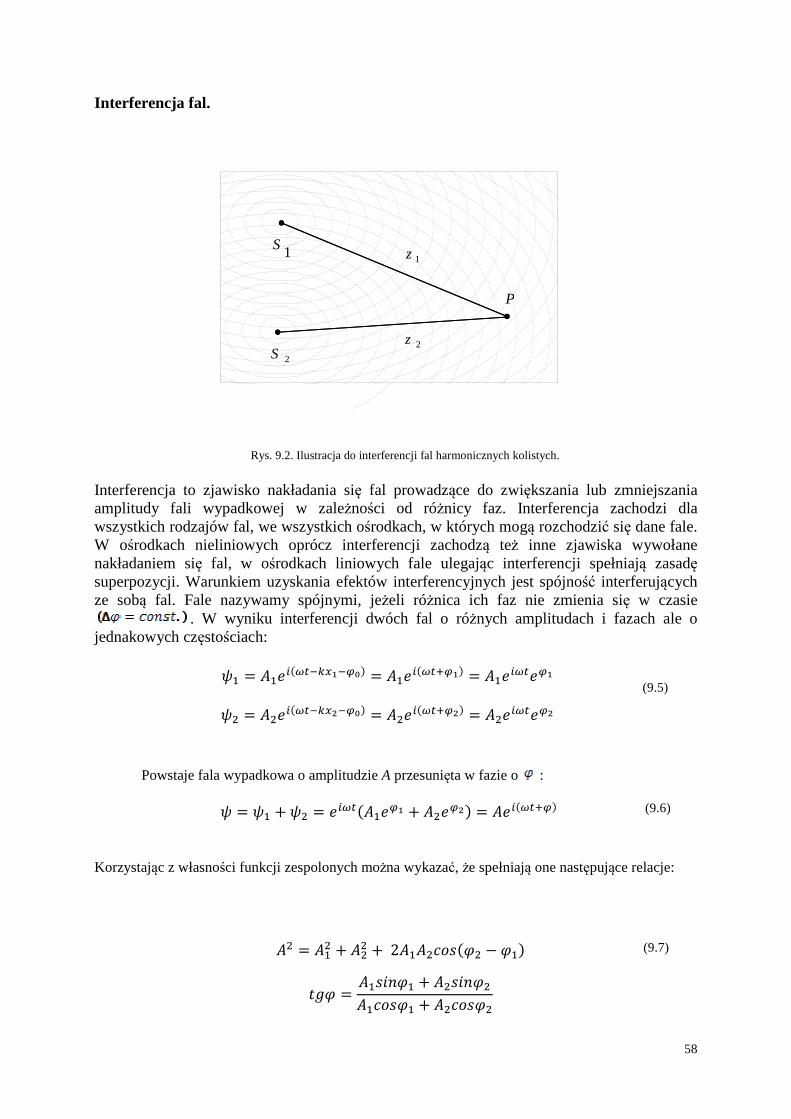
Interferencja fal.
Rys. 9.2
Interferencja to zjawisko nakładania siamplitudy fali wypadkowej w zalewszystkich rodzajów fal, we wszystkich oW ośrodkach nieliniowych oprócz interferencji zachodznakładaniem się fal, w ośrodkach liniowych fale ulegajsuperpozycji. Warunkiem uzyskania efektów interferencyjnych jest spójnoze sobą fal. Fale nazywamy spójnymi, je
. W wyniku interferencji dwóch fal o rójednakowych częstościach:
p = qrp = qr
Powstaje fala wypadkowa o amplitudzie
p = p + Korzystając z własności funkcji zespolonych mo
q
1S
2S
Rys. 9.2. Ilustracja do interferencji fal harmonicznych kolistych.
nakładania się fal prowadzące do zwiększania lub zmniejszania mplitudy fali wypadkowej w zależności od różnicy faz. Interferencja zachodzi dla
wszystkich rodzajów fal, we wszystkich ośrodkach, w których mogą rozchodzirodkach nieliniowych oprócz interferencji zachodzą też inne zjawiska wywołane
środkach liniowych fale ulegając interferencji spełniaj. Warunkiem uzyskania efektów interferencyjnych jest spójno
fal. Fale nazywamy spójnymi, jeżeli różnica ich faz nie zmienia si. W wyniku interferencji dwóch fal o różnych amplitudach i fazach ale o
@2stL=tuv4 = qr@2swu4 = qr@sru
@2stL=tuv4 = qr@2swu4 = qr@sru
Powstaje fala wypadkowa o amplitudzie A przesunięta w fazie o :
+ p = r@s2qru + qru4 = qr@2swu4
ci funkcji zespolonych można wykazać, że spełniają one nast
q = q + q + 2qq,-2x − x4
+x = q56x + q56xq,-x + q,-x
1
2
1z
P
2z
58
kszania lub zmniejszania nicy faz. Interferencja zachodzi dla
rozchodzić się dane fale. inne zjawiska wywołane
c interferencji spełniają zasadę . Warunkiem uzyskania efektów interferencyjnych jest spójność interferujących
nica ich faz nie zmienia się w czasie nych amplitudach i fazach ale o
(9.5)
4 (9.6)
one następujące relacje:
(9.7)

co pokazuje poniższy rysunek. Wyst
nazywamy wyrazem interferencyjnym, który podkre Rys.9.3. Interferencja dwóch fal o jednakowych czpowyżej relacje wynikają także z relacji geometrycznych W prostszej wersji trygonometrycznej ograniczamy sio tych samych amplitudach 0A
równych zeru, fale te opisują równania:
= Ax 01 cos
gdzie 1z i 2z są odległościami miejsca interferencji wypadkową powstałą w wyniku nało
=x
gdzie A jest niezależną od czasu amplitudróżnicy dróg przebytych przez obydwa ciwzmocnienie) rejestrujemy, gdy co odpowiada sytuacji, w której ciwypadkowego równa jest zeru (wygaszenie), gdy spełniony jest warunek:
2z
opisujący przypadek nakładania si
szy rysunek. Występujący w pierwszym z powyższych równa2qq,-2x − x4
nazywamy wyrazem interferencyjnym, który podkreśla istotę stałości faz.
Rys.9.3. Interferencja dwóch fal o jednakowych częstościach, ale różnych fazach i amplitudach. Wyprowadzone e z relacji geometrycznych.
W prostszej wersji trygonometrycznej ograniczamy się do nakładania się dwóch fal harmonicznych i tych samych częstościach kołowych 0ω . Przy pocz
ą równania:
−v
zt 1
0cosω ,
−=v
ztAx 2
002 cosω ,
ciami miejsca interferencji P od źródeł ruchu falowego w wyniku nałożenia się obydwu ciągów fal opisuje równanie:
+−=+=
v
zztAxx
2cos 21
021 ω ,
λπ )(
cos2 120
zzAA
−= ,
od czasu amplitudą fali wypadkowej. Wielkość tej amplitudy zalenicy dróg przebytych przez obydwa ciągi fal. Maksymalną wartość amplitudy
λnzz =− 12 , ,...3,2,1,0=n ,
co odpowiada sytuacji, w której ciągi fal spotykają się w zgodnych fazach. Amplituda drgania wypadkowego równa jest zeru (wygaszenie), gdy spełniony jest warunek:
2)12(12
λ+=− nz , ,...3,2,1,0=n ,
cy przypadek nakładania się ciągów fal o przeciwnych fazach.
A1
A2
A
59
szych równań czynnik
nych fazach i amplitudach. Wyprowadzone
ę dwóch fal harmonicznych . Przy początkowych fazach
(9.8)
1S i 2S (Rys. 7.6.). Falę gów fal opisuje równanie:
(9.9)
(9.10)
tej amplitudy zależy tylko od
amplitudy 02AA = (maksymalne
(9.11)
w zgodnych fazach. Amplituda drgania
(9.12)
x

60
Fala stojąca.
Rys. 9.4. Strzałki i węzły fali stojącej. Fala stojąca jest szczególnym przypadkiem nakładania się dwóch ciągów fal, które mają te same amplitudy i częstości, lecz rozchodzą się w przeciwnych kierunkach. Przy początkowych fazach równych zeru, fale te opisują równania:
−=v
ztAx 001 cos ω ,
+=v
ztAx 002 cos ω . (9.13)
Superpozycja obydwu ciągów fal prowadzi do powstania fali stojącej opisanej równaniem: )cos( 021 tAxxx ω=+= , (9.14)
λπ z
AA2
cos2 0= . (9.15)
Rozwiązanie to nie zawiera członu falowego i opisuje drganie harmoniczne proste o częstości 0ω
i zmieniającej się przestrzennie amplitudzie A . Maksymalne wartości amplitud 02AA = powstają w strzałkach określonych przez warunek:
2
λnz = , ,...3,2,1,0=n . (9.16)
Amplitudy są równe zeru w węzłach fali stojącej spełniających warunek:
4
)12(λ+= nz , ,...3,2,1,0=n . (9.17)
Fali stojącej nie towarzyszy transport energii. Dyfrakcja
Dyfrakcja (ugięcie fali) to zjawisko fizyczne zmiany kierunku rozchodzenia się fali na przeszkodach oraz szczelinach. Zjawisko zachodzi dla wszystkich wielkości przeszkód i szczelin , ale wyraźnie jest obserwowane dla przeszkód i szczelin o rozmiarach porównywalnych z długością fali.
)(zA
z
)(zA−
02A
λ2/λ0
02A−
2/3λ λ2
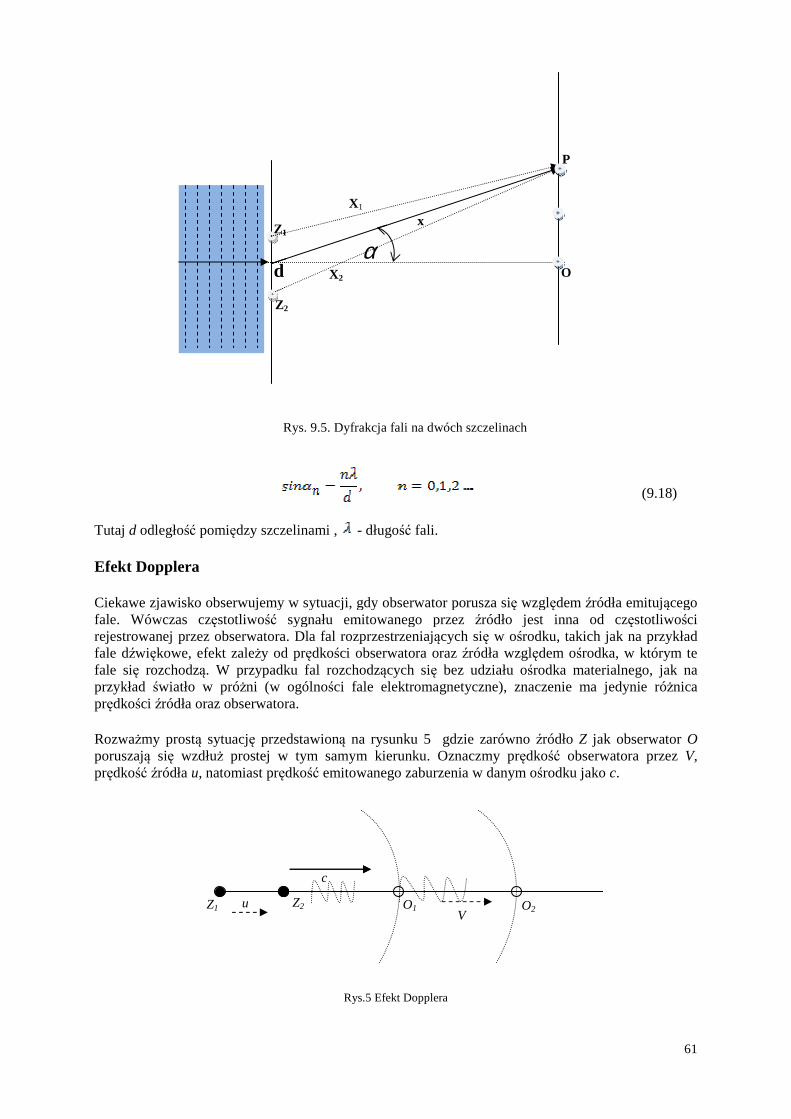
Rys.
Tutaj d odległość pomiędzy szczelinami ,
Efekt Dopplera
Ciekawe zjawisko obserwujemy w sytuacji, gdy obserwator porusza sifale. Wówczas częstotliwość sygnału emitowanego przez rejestrowanej przez obserwatora. fale dźwiękowe, efekt zależy od prfale się rozchodzą. W przypadku fal rozchodzprzykład światło w próżni (w ogólnoprędkości źródła oraz obserwatora.
Rozważmy prostą sytuację przedstawionporuszają się wzdłuż prostej w tym samym kierunku. Oznaczmy prprędkość źródła u, natomiast prędko
Z1
Z2
d
Z1 u
Rys. 9.5. Dyfrakcja fali na dwóch szczelinach
dzy szczelinami , - długość fali.
Ciekawe zjawisko obserwujemy w sytuacji, gdy obserwator porusza się względem ść sygnału emitowanego przez źródło jest inna od cz
rejestrowanej przez obserwatora. Dla fal rozprzestrzeniających się w ośrodku, takich jak na przykład y od prędkości obserwatora oraz źródła względem oś
. W przypadku fal rozchodzących się bez udziału ośrodka materialnego, jak na ni (w ogólności fale elektromagnetyczne), znaczenie ma jedynie ró
ródła oraz obserwatora.
przedstawioną na rysunku 5 gdzie zarówno źródło prostej w tym samym kierunku. Oznaczmy prędkość obserwatora przez
, natomiast prędkość emitowanego zaburzenia w danym ośrodku jako
Rys.5 Efekt Dopplera
α
x X1
X2
1
2
O
P
Z2 O1 O2
c
V
61
(9.18)
ędem źródła emitującego ródło jest inna od częstotliwości
rodku, takich jak na przykład dem ośrodka, w którym te
rodka materialnego, jak na ci fale elektromagnetyczne), znaczenie ma jedynie różnica
ródło Z jak obserwator O obserwatora przez V,
rodku jako c.

62
Załóżmy, że pierwszy sygnał zostaje wysłany gdy źródło znajduje się w pozycji Z1 i dociera do obserwatora w pozycji O1. Wysłany sygnał przebywa więc odcinek Z1O1 w określonym czasie t1.
Drugi sygnał zostaje wysłany po czasie odpowiadającym okresowi dla źródła T1, w którym przebędzie ono drogę Z1Z2. Zostanie on odebrany przez poruszającego się obserwatora w punkcie O2. Czas pomiędzy odebraniem przez obserwatora dwóch kolejnych sygnałów jest oczywiście mierzonym przez niego okresem T2. W tym czasie przebywa on drogę O1O2. Natomiast drugi sygnał przebywa drogę Z2O2 w pewnym czasie t2. Z rysunku wynika bezpośrednio relacja:
Z1O2=Z1O1+O1O2=Z1Z2+Z2O2
(9.19)
Gdzie poszczególne odcinki są równe odpowiednio:
Z1O1=ct1, O1O2=VT2, Z1Z2=uT1, Z2O2=ct2
(9.20)
Z drugiej strony przedział czasowy pomiędzy emisją przez źródło pierwszego sygnału i odbiorem przez obserwatora drugiego jest równy:
T1+t2=T2+t1
(9.21)
Wyznaczając różnicę t2-t1 z ostatniego równania i podstawiając wraz z relacjami 35 do równania 34 otrzymujemy:
c(T2-T1)= VT2- uT1
(9.22)
Skąd bezpośrednio możemy wyznaczyć okres mierzony przez obserwatora w funkcji okresu źródła oraz obu prędkości:
( = ( , − y, −
(9.23)
Lub przechodząc do częstotliwości: z = z , − , − y
(9.24)
Korzystając z ostatniej relacji można rozważyć szereg różnych sytuacji związanych z ruchem źródła i obserwatora, zakładając również spoczynek jednego z obiektów. Jest oczywiste, że w przypadku ruchu źródła lub obserwatora z prędkością skierowaną pod pewnym kątem do kierunku propagacji fali do równania wchodzi odpowiednia składowa prędkości ,-x.
Rys.6 Efekt Dopplera w przypadku gdy kierunek ruchu obserwatora nie jest zgony z kierunkiem propagacji fali.
c
V
x
,-x

63
Reasumując można stwierdzić, że jeżeli w wyniku ruchu źródła, lub obserwatora zmniejsza się odległość między nimi obserwator rejestruje wyższą częstotliwość sygnału , natomiast częstotliwość rejestrowanego sygnału się zmniejsza jeżeli obserwator i źródło oddalają się od siebie. Należy zwrócić uwagę na fakt, że inne są zmiany częstotliwości w sytuacji gdy obserwator jest nieruchomy, a źródło zbliża (oddala) się od niego z prędkością u, niż w przypadku nieruchomego źródła i zbliżającego (oddalającego) się od niego obserwatora z ta samą prędkością V=u;
z ,, − y ≠ z , − y,
(9.25)
Interesujący jest przypadek w którym źródło porusza się z prędkością większą od prędkości fali y > ,. W tej sytuacji źródło wyprzedza wyemitowany przez siebie sygnał i powstaje tak zwana fala uderzeniowa. Zjawisko Dopplera występuje również w przypadku fal elektromagnetycznych w sytuacji, kiedy źródło fali porusza się względem obserwatora. Analiza zjawiska jest bardzo podobna jak w przypadku fal mechanicznych z tym, że dla źródeł poruszających się z dużymi prędkościami klasyczna transformacja Galileusza powinna być zastąpiona relatywistyczną transformacją Lorentza. W ten sposób czas w układzie związanym ze źródłem poruszającym się z prędkością u jest zmniejszony o
czynnik relatywistyczny Ft|% i konsekwencji równanie 20 przekształca się w :
z = z √1 − y, − y
(9.26)
W odróżnieniu do fal mechanicznych efekt Dopplera występuje obecnie również w przypadku gdy
kierunek ruchu jest prostopadły do kierunku propagacji fal Tx = ~U co potwierdza eksperyment tzw.
wiązek molekularnych. W próżni nie mogą powstawać fale uderzeniowe ze względu na fakt, że żaden materialny obiekt nie może się poruszać z prędkością większą od prędkości fal elektromagnetycznych w próżni. Sytuacja jednak ulega zmianie w ośrodku materialnym w którym prędkość fal elektromagnetycznych może być mniejsza od prędkości poruszających się w tym ośrodku cząstek materialnych np. elektronów i wówczas obserwujemy szereg zjawisk związanych z tak zwanym promieniowaniem Czerenkowa. Przykład 1. Dwa ciągi fal spójnych o tej samej amplitudzie mm50 =A i tej samej częstotliwości Hz1500=f przemieszczają się w jednym kierunku z tą samą prędkością fazową m/s335=v . Faza początkowa
jednego ciągu fal wynosi 001 =ϕ , a drugiego 3/002 πϕϕ =≡ . Wyprowadzić równanie opisujące falę wypadkową. Z jaką amplitudą będą drgały cząsteczki środowiska w miejscu interferencji oraz jaka będzie odległość dzieląca dwa sąsiadujące bezpośrednio punkty drgające z maksymalną amplitudą? Zadanie rozwiązać także w sytuacji, gdy fale przemieszczają się w przeciwnych kierunkach. Rozwiązanie: Każda z fal opisana jest równaniem (7.13). W przypadku fal poruszających się w tym samym kierunku równania te mają postać:
−=v
ztfAtzx π2cos),( 01 ,
+
−=3
2cos),( 02
ππv
ztfAtzx .

64
Wykorzystując znany, trygonometryczny wzór:
2
cos2
cos2
1coscos
βαβαβα +−=+
oraz stosując zasadę superpozycji, otrzymamy równanie fali wypadkowej:
+
−
=+=6
2cos6
cos2),( 021
πππv
ztfAxxtzx .
Cząsteczki środowiska będą drgały z amplitudą mm5)6/cos(2 00 === AAA π , a odległość dzieląca dwa sąsiadujące bezpośrednio punkty drgające z maksymalną amplitudą będzie równa długości fali
cm22,3/ == fvλ . W przypadku, gdy jedna z fal, np. pierwsza, porusza się w kierunku przeciwnym, jej równanie falowe będzie miało postać:
+=v
ztfAtzx π2cos),( 01 ,
a fala wypadkowa będzie opisana równaniem:
+
−=+=6
2cos6
2cos2),( 021
ππππ ftv
zfAxxtzx .
Równanie to przedstawia falę stojącą o przestrzennie zmieniającej się amplitudzie
−=6
2cos2)( 0
ππv
zfAzA .
Maksymalne wartości amplitudy wynoszą 02A , a ich położenie z wyznacza warunek:
πππ nv
zf =−
62 , ,...3,2,1,0=n , skąd λ
12
16 += nzn .
Odległość dzieląca dwa sąsiadujące bezpośrednio punkty drgające z maksymalną amplitudą będzie równa cm11,22/1 ==−+ λnn zz . Przykład.2. Metalowa struna o długości l i średnicy S, zamocowana sztywno na jednym z końców, z drugiej strony obciążona ciężarem Q została pobudzona do drgań przy pomocy generatora o częstości . W rezultacie powstaje na niej fala stojąca składająca się z trzech połówek fali (rysunek). Wyznaczyć gęstość metalu z którego wykonana jest struna.
λ2/λ 2/3 λ
Q

65
Rozwiązanie:
Korzystamy z równania pozwalającego wyznaczyć prędkość fali w ośrodku sprężystym:
µF
V =
tutaj
l
m=µ
oznacza gęstość struny przypadającej na jednostkową długość i jest związane z gęstością poprzez relację:
Sl
m
V
m
⋅==ρ
SS
⋅=⇒= ρµµρ
Ponieważ zgodnie z treścią zadania na strunie mieści się n=3 połówek fali
2
λnl =
n
l2=λ
możemy z tej relacji wyznaczyć długość fali, która następnie pozwala na wyznaczenie prędkości:
λνν
λ =⇒== VV
VT
Porównując obydwie relacje na prędkość fali
S
F
n
l
⋅=
ρν2
Po podniesieniu stronami do kwadratu
S
F
n
l
⋅=
ρν2
224
Wyznaczamy gęstość metalu z którego wykonana jest struna.
Sl
Fn22
2
4 νρ =
10. Hydrostatyka i hydrodynamika
Ciśnienie hydrostatyczne. Jest to ciśnienie wywołane ciężarem cieczy. Ciśnienie to zależy tylko od wysokości słupa cieczy, tj. od głębokości, na której jest mierzone oraz od gęstości cieczy. Na głębokości h , ciśnienie hydrostatyczne cieczy o gęstości ρ określa wyrażenie:
hgp ρ= , 2s
m81.9=g . (10.1)
Obok ciśnienia hydrostatycznego na ciecz może działać dodatkowo ciśnienie statyczne, czyli ciśnienie wywierane na ciecz z zewnątrz. Jeżeli na powierzchnię swobodną cieczy działa ciśnienie statyczne 0p
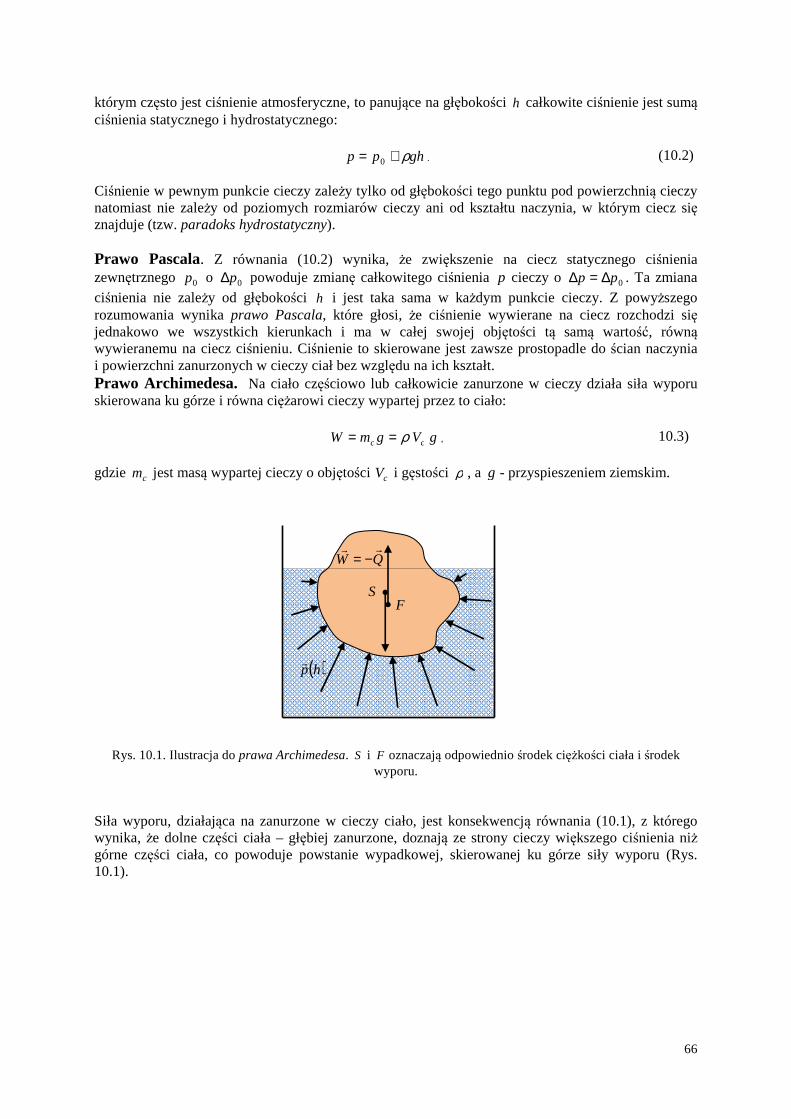
66
którym często jest ciśnienie atmosferyczne, to panujące na głębokości h całkowite ciśnienie jest sumą ciśnienia statycznego i hydrostatycznego: ghpp ρ+= 0 . (10.2) Ciśnienie w pewnym punkcie cieczy zależy tylko od głębokości tego punktu pod powierzchnią cieczy natomiast nie zależy od poziomych rozmiarów cieczy ani od kształtu naczynia, w którym ciecz się znajduje (tzw. paradoks hydrostatyczny). Prawo Pascala. Z równania (10.2) wynika, że zwiększenie na ciecz statycznego ciśnienia zewnętrznego 0p o 0p∆ powoduje zmianę całkowitego ciśnienia p cieczy o 0pp ∆=∆ . Ta zmiana ciśnienia nie zależy od głębokości h i jest taka sama w każdym punkcie cieczy. Z powyższego rozumowania wynika prawo Pascala, które głosi, że ciśnienie wywierane na ciecz rozchodzi się jednakowo we wszystkich kierunkach i ma w całej swojej objętości tą samą wartość, równą wywieranemu na ciecz ciśnieniu. Ciśnienie to skierowane jest zawsze prostopadle do ścian naczynia i powierzchni zanurzonych w cieczy ciał bez względu na ich kształt. Prawo Archimedesa. Na ciało częściowo lub całkowicie zanurzone w cieczy działa siła wyporu skierowana ku górze i równa ciężarowi cieczy wypartej przez to ciało: gVgmW cc ρ== , 10.3) gdzie cm jest masą wypartej cieczy o objętości cV i gęstości ρ , a g - przyspieszeniem ziemskim.
Rys. 10.1. Ilustracja do prawa Archimedesa. S i F oznaczają odpowiednio środek ciężkości ciała i środek wyporu.
Siła wyporu, działająca na zanurzone w cieczy ciało, jest konsekwencją równania (10.1), z którego wynika, że dolne części ciała – głębiej zanurzone, doznają ze strony cieczy większego ciśnienia niż górne części ciała, co powoduje powstanie wypadkowej, skierowanej ku górze siły wyporu (Rys. 10.1).
SF
( )hpr
QWrr
−=

67
Hydrodynamika.
Rys. 10.2. Ilustracja do równania ciągłości i równania Bernoulliego. Równanie ciągłości. Objętość cieczy nieściśliwej przepływającej w jednostce czasu przez dowolny przekrój poprzeczny strugi jest wielkością stałą: const=Sv , (10.4) gdzie S jest polem przekroju poprzecznego strugi, a v - prędkością przepływającej cieczy w tym przekroju (Rys.10.2.). Z równania ciągłości wynika, że w strudze o zmiennym przekroju, dowolny segment przemieszczającej się cieczy zmienia w czasie przepływu swoją prędkość, a zatem i energię kinetyczną. Zmiana energii kinetycznej odbywa się kosztem pracy wykonanej przez siły wynikające z różnicy ciśnień panujących na różnych przekrojach strugi. Równanie Bernoulliego. Równanie to opisuje zależność między ciśnieniem, a prędkością stacjonarnego przepływu cieczy idealnej (nielepkiej i nieściśliwej) w strudze, w obecności pola grawitacyjnego:
const2
1 2 =++ vghp ρρ , (10.5)
gdzie: • p - ciśnienie cieczy,
• v - prędkość cieczy, • ρ - gęstość cieczy,
• h - wysokość względem poziomu odniesienia, • g - przyspieszenie ziemskie. Prawo Stokesa. Prawo to określa siłę oporu działającą na kulę o promieniu r , poruszającą się z prędkością v w cieczy o współczynniku lepkości η : vrF ηπ6= . (10.6) Równanie to spełnione jest dla względnie małych prędkości v , przy których ruch cieczy względem kuli jest laminarny. Jednostki ciśnienia.
• 1 pascal: 2m
N11Pa= ,
• 1 bar: Pa1000001bar= ,
• 1 milibar: hPa1Pa100mbar1 == ,
11, pS
1vr
1h
2h0
h
22 , pS
2vr

68
• 1 hektopascal: mbar1Pa100hPa1 == ,
• 1 atmosfera techniczna: Pa98100cm
kG1at1
2== ,
• 1 atmosfera fizyczna: Pa101325atm1 = . Jest to ciśnienie wywierane przez słup rtęci o wysokości
mm760 . Przykład 1. Areometr, którego masa g60=M , obciążono kawałkami metalu o masie g5=m . Po obciążeniu
areometr zanurzył się w wodzie tak, że wskazywał gęstość 32 kg/m950=ρ . Obliczyć gęstość metalu
mρ . Gęstość wody 31 kg/m1000=ρ .
Rozwiązanie: Oznaczmy przez V objętość zanurzonej w wodzie części areometru w przypadku, gdy nie jest on obciążony kawałkami metalu. Zgodnie z prawem Archimedesa (8.3), ciężar areometru jest zrównoważony wyporem wody, co pozwala obliczyć objętość V :
VgMg 1ρ= ,
1ρM
V = .
Rozważmy sytuację, w której areometr bez dodatkowego obciążenia znalazłby się w cieczy o gęstości
12 ρρ < . Objętość zanurzonej części areometru wzrosłaby wówczas w porównaniu z objętością V o
pewną dodatkową objętość V∆ tak, by skala areometru pokazywała gęstość cieczy 2ρ . Dodatkowa objętość V∆ określona jest także przez prawo Archimedesa:
gVM
gVVMg
∆+=∆+=
1
22 )(ρ
ρρ ,
21
21
ρρρρ −
=∆ MV .
Areometr zanurzony w wodzie i obciążony kawałkami metalu pokazuje gęstość 2ρ , co oznacza, że
objętość jego zanurzonej części wynosi VV ∆+ . Oznaczając dodatkowo przez mV objętość zajmowaną przez podwieszony metal możemy prawo Archimedesa zapisać w postaci:
gm
MM
gVVVgmMm
m
+−+=+∆+=+
ρρρρρ
ρρρ
21
21
1
11 )()( .
Równanie to pozwala obliczyć nieznaną gęstość metalu mρ :
)( 212
21
ρρρρρρ
−−=
Mm
mm .
Podstawiając ujednolicone w jednym systemie jednostek dane liczbowe otrzymamy 3kg/m2714=mρ . Przykład 2. Przez poziomą rurę o różnych przekrojach przepływa woda. Obliczyć, jaka masa wody przepływa przez dowolny przekrój rury w czasie s1 , jeżeli w rurkach manometrycznych wmontowanych w rurę
w miejscach o przekrojach 21 cm10=S i 2
2 cm20=S , różnica poziomów wody wynosi cm20=∆h .
Gęstość wody 3g/cm1=ρ , przyspieszenie ziemskie 2m/s9,81=g .
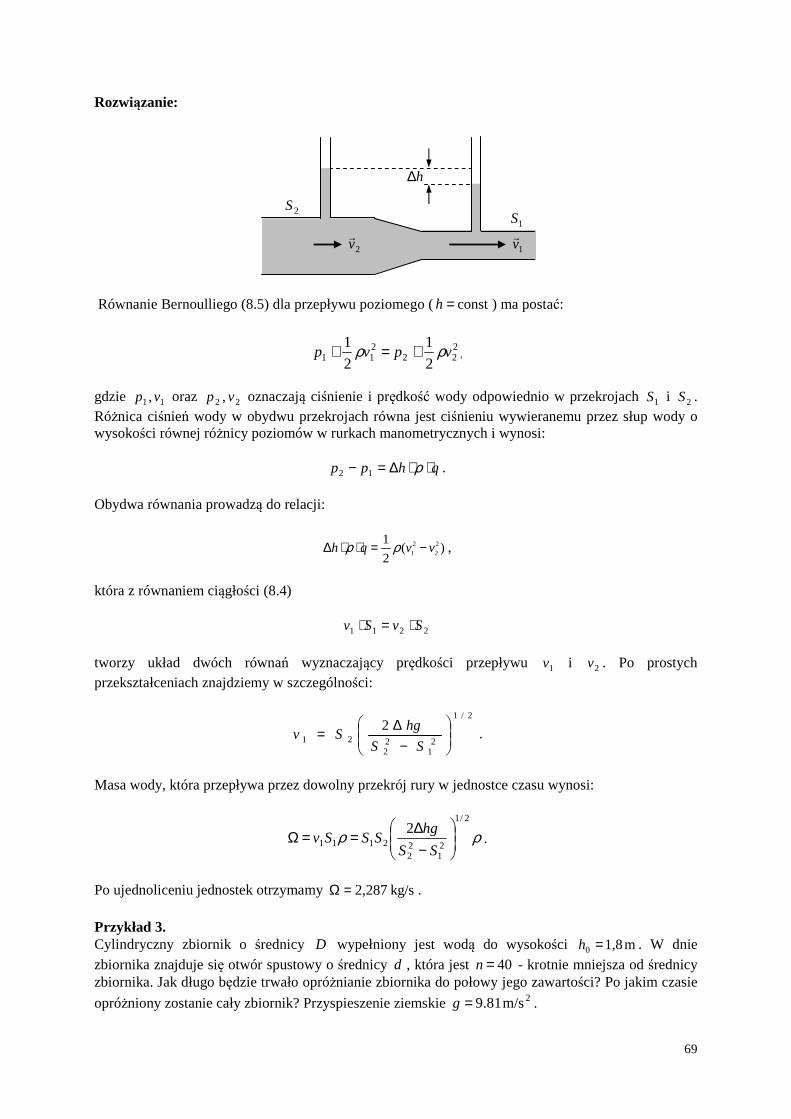
69
Rozwiązanie: Równanie Bernoulliego (8.5) dla przepływu poziomego ( const=h ) ma postać:
222
211 2
1
2
1vpvp ρρ +=+ ,
gdzie 11,vp oraz 22 ,vp oznaczają ciśnienie i prędkość wody odpowiednio w przekrojach 1S i 2S . Różnica ciśnień wody w obydwu przekrojach równa jest ciśnieniu wywieranemu przez słup wody o wysokości równej różnicy poziomów w rurkach manometrycznych i wynosi: qhpp ⋅⋅∆=− ρ12 . Obydwa równania prowadzą do relacji:
)(2
1 22
21 vvqh −=⋅⋅∆ ρρ ,
która z równaniem ciągłości (8.4) 2211 SvSv ⋅=⋅ tworzy układ dwóch równań wyznaczający prędkości przepływu 1v i 2v . Po prostych przekształceniach znajdziemy w szczególności:
2/1
21
22
212
−∆=
SS
hgSv .
Masa wody, która przepływa przez dowolny przekrój rury w jednostce czasu wynosi:
ρρ2/1
21
22
21112
−∆==Ω
SS
hgSSSv .
Po ujednoliceniu jednostek otrzymamy kg/s2,287=Ω .
Przykład 3. Cylindryczny zbiornik o średnicy D wypełniony jest wodą do wysokości m1,80 =h . W dnie zbiornika znajduje się otwór spustowy o średnicy d , która jest 40=n - krotnie mniejsza od średnicy zbiornika. Jak długo będzie trwało opróżnianie zbiornika do połowy jego zawartości? Po jakim czasie
opróżniony zostanie cały zbiornik? Przyspieszenie ziemskie 2m/s9.81=g .
2S1S
h∆
1vr
2vr

70
Rozwiązanie: Aby rozwiązać zadanie, należy określić prędkość v opadania poziomu cieczy w zbiorniku podczas jego opróżniania. Zależność tą znajdziemy wykorzystując równanie ciągłości (8.4) oraz równanie Bernoulliego (8.5), które zastosowane do poziomów h i 0=h przyjmą odpowiednio postać:
Vd
vD
22
22
=
ππ , vnV 2= ,
22
2
1
2
1Vpvghp ρρρ +=++ ,
gdzie p jest ciśnieniem atmosferycznym – takim samym na wysokości h i 0=h , a V jest prędkością wody wypływającej z otworu spustowego. Eliminując z powyższego układu równań V , otrzymamy poszukiwaną zależność:
hn
gv
2/1
4 1
2
−= .
Elementarna zmiana dh poziomu wody w zbiorniku wiąże się z prędkością opadania tego poziomu v za pośrednictwem relacji:
dthn
gvdtdh
2/1
4 1
2
−==− , )0( <dh .
Separując zmienne h i t oraz całkując otrzymane równanie po czasie znajdziemy:
∫∫ −−= dt
n
g
h
dh
1
24
, 042
1
22 h
n
gth +
−−= .
Stała całkowania jest równa 02 h , co wynika z założenia, że w umownym momencie 0=t poziom
cieczy był równy 0h . Równanie to określa czas t , po którym poziom wody w zbiorniku spadnie do
wartości h. Dla 14 >>n otrzymamy:
D
d
0h
hv
0=h
V

71
)(2
)()1(2
0
2
2/1
0
4
hhng
hhg
nt −
≈−−= .
Przyjmując 2/0hh = , znajdziemy czas 2/1T , po którym zbiornik zostanie opróżniony do połowy:
2/1
02
2/1 )12(
−=
g
hnT .
Przyjmując 0=h , znajdziemy czas T , po którym zbiornik zostanie opróżniony całkowicie:
2/1
022
=
g
hnT .
Uwzględniając dane liczbowe otrzymamy: s8422/1 =T , s969=T . Należy zwrócić uwagę, że przy zaniedbaniu zjawisk związanych z lepkością, prędkość i czas opróżniania zbiornika nie zależą od gęstości cieczy. Przykład 4. Na granicy podziału dwóch niemieszających się cieczy o gęstościach 1ρ i 2ρ pływa kulka tak, ze
stosunek objętości zanurzonych w cieczach części kulki wynosi nVV =21 . Znaleźć gęstość kulki. Zgodnie z warunkiem równowagi F1, F2 oznaczają siły wyporu, które powinny być na rysunku zaczepione w jednym punkcie. Dla przejrzystości zaczepione są w różnych punktach, żeby zaznaczyć, która z cieczy jest źródłem danej siły wyporu.
21
21
FFgm
FFQ
+=⋅+=
gVgVgV ⋅⋅+⋅⋅=⋅⋅ 2211 ρρρ
221121 )( VVVV ⋅+⋅=+ ρρρ /: 2V
21)1( ρρρ +⋅=+ nn
Q
F1
F2
Przykład 5 W dnie cylindrycznego naczynia o prędkości vobniżania się poziomu wody w naczyniu od wysokoziemskie g .
Oznaczmy powierzchnię
wyciekającej z naczynia wody przez
0 2
vp
⋅+ ρ
Podstawiając za prędkość wypływaj
i wyznaczamy prędkość z jaką obni
11.Elementy termodynamiki
Ciepło i temperatura
Wszystkie ciała , które bezpośrednio obserwujemy składajwięc ciała makroskopowe. Cządecyduje o stanie wewnętrznym kaliczbę cząsteczek (100g wody zawiera ponad decydują nie parametry mikroskopowe pojedynczej cz
Przykładowo podstawowy parametr makroskopowy jakim jest wprost proporcjonalny do średniej energii kinetycznej cz
Zgodnie z termodynamiką fenomenologicznsytuacji gdy zanika wszelki ruch cz
to ciśnienie S
Fp = , oraz gęstość
Żeby zrozumieć pojęcie ciepła rozwaniższą od drugiego (rys.11.1). Oznacza to, pierwszego ciała jest mniejsza niż
121
++⋅
=n
n ρρρ
W dnie cylindrycznego naczynia o średnicy D znajduje się mały okrągły otwór o ś poziomu wody w naczyniu od wysokości htego poziomu. Przyspieszenie
Oznaczmy powierzchnię naczynia przez 1S , powierzchnię otworu przez
cej z naczynia wody przez 1v . Zapiszmy równanie Bernoullie’go i równanie ci
21
221
0
2
222
vghvv
phgv =+⇒
⋅+=⋅⋅+ ρρ
2
11121 S
vSvvSvS
⋅=⇒⋅=⋅
wypływającej wody przekształcamy równanie Bernoul
ghvS
vS22
22
221 =−⋅
ą obniża się poziom wody w naczyniu:
22
21
222
21
222 22
SS
ghSv
SS
Sghv
−=⇒
−⋅
=
44
2 2
dD
ghdv
−=
11.Elementy termodynamiki
średnio obserwujemy składają się z olbrzymiej liczby czc ciała makroskopowe. Cząsteczki te poruszają się ruchem bezładnym,(termicznym) który
trznym każdego ciała makroskopowego. Jednak ze wzglsteczek (100g wody zawiera ponad 1024czasteczek), o stanie makroskopowym układu
nie parametry mikroskopowe pojedynczej cząsteczki, ale ich średnie statystyczne.podstawowy parametr makroskopowy jakim jest temperatura bezwzgl
iej energii kinetycznej cząsteczek (~⟨DL⟩
fenomenologiczną temperatura zera bezwzględnego sytuacji gdy zanika wszelki ruch cząsteczek. Inne parametry makroskopowe istotne w termodynamic
stość V
m=ρ .
cie ciepła rozważmy układ dwóch ciał, z których pierwsze ma temperatur od drugiego (rys.11.1). Oznacza to, że średnia energia kinetyczna , a więc i pr
pierwszego ciała jest mniejsza niż cząsteczek drugiego.
72
gły otwór o średnicy d . Znaleźć tego poziomu. Przyspieszenie
otworu przez 2S , prędkość
. Zapiszmy równanie Bernoullie’go i równanie ciągłości strugi
Bernoullie’go
brzymiej liczby cząsteczek, są to ruchem bezładnym,(termicznym) który
dego ciała makroskopowego. Jednak ze względu na ogromną czasteczek), o stanie makroskopowym układu
rednie statystyczne. temperatura bezwzględna T jest
(11.1)
dnego - 0K, odpowiada Inne parametry makroskopowe istotne w termodynamice
my układ dwóch ciał, z których pierwsze ma temperaturę ęc i prędkość cząsteczek
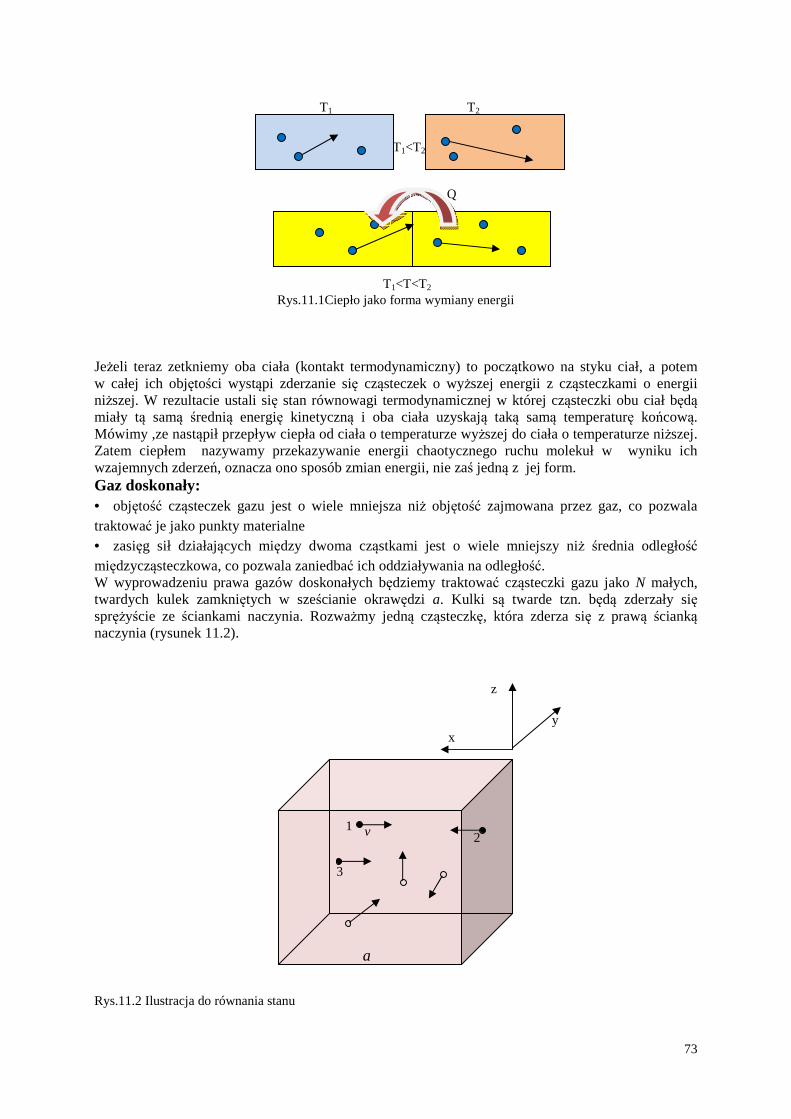
73
Rys.11.1Ciepło jako forma wymiany energii Jeżeli teraz zetkniemy oba ciała (kontakt termodynamiczny) to początkowo na styku ciał, a potem w całej ich objętości wystąpi zderzanie się cząsteczek o wyższej energii z cząsteczkami o energii niższej. W rezultacie ustali się stan równowagi termodynamicznej w której cząsteczki obu ciał będą miały tą samą średnią energię kinetyczną i oba ciała uzyskają taką samą temperaturę końcową. Mówimy ,ze nastąpił przepływ ciepła od ciała o temperaturze wyższej do ciała o temperaturze niższej. Zatem ciepłem nazywamy przekazywanie energii chaotycznego ruchu molekuł w wyniku ich wzajemnych zderzeń, oznacza ono sposób zmian energii, nie zaś jedną z jej form. Gaz doskonały: • objętość cząsteczek gazu jest o wiele mniejsza niż objętość zajmowana przez gaz, co pozwala traktować je jako punkty materialne • zasięg sił działających między dwoma cząstkami jest o wiele mniejszy niż średnia odległość międzycząsteczkowa, co pozwala zaniedbać ich oddziaływania na odległość. W wyprowadzeniu prawa gazów doskonałych będziemy traktować cząsteczki gazu jako N małych, twardych kulek zamkniętych w sześcianie okrawędzi a. Kulki są twarde tzn. będą zderzały się sprężyście ze ściankami naczynia. Rozważmy jedną cząsteczkę, która zderza się z prawą ścianką naczynia (rysunek 11.2). Rys.11.2 Ilustracja do równania stanu
T1 T2
T1<T2
Q
T1<T<T2
a
v 1 2
3
x y
z
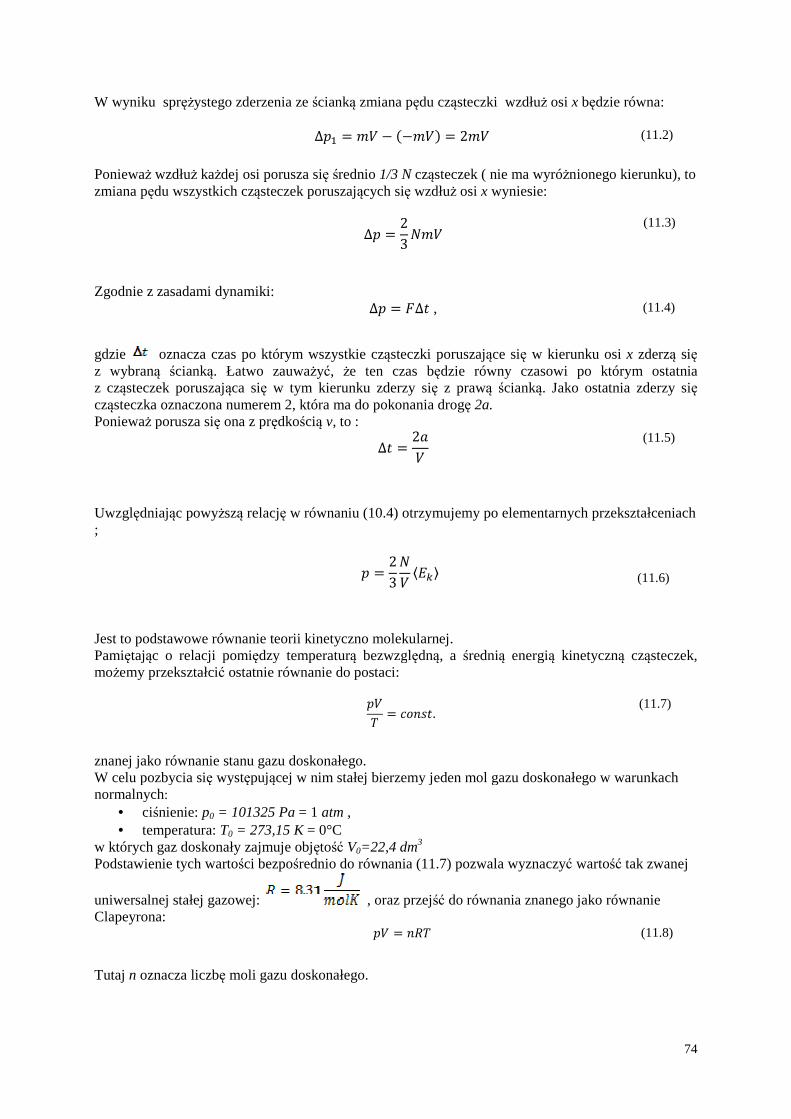
W wyniku sprężystego zderzenia ze
Ponieważ wzdłuż każdej osi porusza sizmiana pędu wszystkich cząsteczek poruszaj
Zgodnie z zasadami dynamiki:
gdzie oznacza czas po którym wszystkie czz wybraną ścianką. Łatwo zauwaz cząsteczek poruszająca się w tym kierunku zderzy sicząsteczka oznaczona numerem 2, która ma do pokonania drogPonieważ porusza się ona z prędko
Uwzględniając powyższą relację w równaniu (10.4) otrzymujemy po elementarnych przekształceniach ;
Jest to podstawowe równanie teorii kinetyczno molekularnej.Pamiętając o relacji pomiędzy temperaturmożemy przekształcić ostatnie równanie do postaci:
znanej jako równanie stanu gazu doskonałegoW celu pozbycia się występującej w nim stałej bierzemy jeden mol gazu doskonałnormalnych:
• ciśnienie: p0 = 101325 Pa• temperatura: T0 = 273,15
w których gaz doskonały zajmuje objPodstawienie tych wartości bezpoś
uniwersalnej stałej gazowej: Clapeyrona:
Tutaj n oznacza liczbę moli gazu doskonałego.
ystego zderzenia ze ścianką zmiana pędu cząsteczki wzdłuż osi x
∆ = − 2− 4 = 2
dej osi porusza się średnio 1/3 N cząsteczek ( nie ma wyróżnionego kierunku), to steczek poruszających się wzdłuż osi x wyniesie:
∆ = 23 0
∆ = ∆ ,
oznacza czas po którym wszystkie cząsteczki poruszające się w kierunku osi . Łatwo zauważyć, że ten czas będzie równy czasowi po którym ostatnia
ę w tym kierunku zderzy się z prawą ścianką. Jako ostatnia zderzy sisteczka oznaczona numerem 2, która ma do pokonania drogę 2a.
ędkością v, to :
∆ = 2
relację w równaniu (10.4) otrzymujemy po elementarnych przekształceniach
= 23 0 ⟨DL⟩
Jest to podstawowe równanie teorii kinetyczno molekularnej. dzy temperaturą bezwzględną, a średnią energią kinetyczn
ostatnie równanie do postaci: ( = ,-6.
nanej jako równanie stanu gazu doskonałego. ącej w nim stałej bierzemy jeden mol gazu doskonał
Pa = 1 atm , = 273,15 K = 0°C
w których gaz doskonały zajmuje objętość V0=22,4 dm3 ci bezpośrednio do równania (11.7) pozwala wyznaczyć warto
, oraz przejść do równania znanego jako równanie
= 6(
moli gazu doskonałego.
74
x będzie równa:
(11.2)
żnionego kierunku), to
(11.3)
(11.4)
w kierunku osi x zderzą się e równy czasowi po którym ostatnia
. Jako ostatnia zderzy się
(11.5)
w równaniu (10.4) otrzymujemy po elementarnych przekształceniach
(11.6)
ą kinetyczną cząsteczek,
(11.7)
cej w nim stałej bierzemy jeden mol gazu doskonałego w warunkach
(11.7) pozwala wyznaczyć wartość tak zwanej
do równania znanego jako równanie
(11.8)
Równanie Van der Waalsa
Równanie Clapeyrona (11.8) dobrze opisuje gazy rzeczywiste ale przy małych gwiększych gęstościach nie można pomingazu oraz że zasięg sił międzycząJ.D. Van der Waals wprowadził zmienione równanie stanu gazu, które uwzglcząsteczki posiadają skończoną objod objętości naczynia. Jeżeli oznaczymy przez zajmowana przez N cząsteczek wypełniajrównanie stanu gazu:
gdzie k jest stałą Boltzmana k = 1.38·10 Działanie sił wzajemnego oddziaływania pomiciśnienia gazu podanego powyższa relacjdo koncentracji n=N/V. Jeżeli zauwagęstości to wywołana oddziaływaniem czproporcjonalna do kwadratu koncentracji. Pozwala to zapisaw formie znanej jako równanie Van der Waalsa:
Tutaj a,b to stałe odpowiednio uwzgl Energia wewnętrzna Energia wewnętrzna jest najwamakroskopowego. Wielkość ta oznaczamy prze wszystkich cząsteczek układu.
W termodynamice koncentrujemy si
• energii kinetycznej cząsteczek wynikaj• energii potencjalnej cząsteczek wynikaj
Energia wewnętrzna układu jest funkcjmakroskopowych. W celu wyznaczenia energii wewnzasadą ekwipartycji energii: średnia energia kinetyczna na kawszystkich cząsteczek i wynosi ½ kTŚrednia energia kinetyczna ruchu post
swobody) wynosi: . Natomiast czstopni swobody wynikających z ruchu posta także dwóch dodatkowych bęniezerowy moment bezwładności :odpowiednio I
.8) dobrze opisuje gazy rzeczywiste ale przy małych gnie można pominąć faktu, że cząstki zajmują część obję
dzycząsteczkowych może być większy niż odległości miJ.D. Van der Waals wprowadził zmienione równanie stanu gazu, które uwzględnia te czyn
ą objętość to rzeczywista objętość dostępna dla cząsteeli oznaczymy przez b objętość pojedynczej czą
steczek wypełniających naczynie wyniesie Nb. Daje to
= 6m( − 0
= 1.38·10-23 J/K.
Działanie sił wzajemnego oddziaływania pomiędzy cząsteczkami powoduje dalszższa relacją. Siły te są proporcjonalne do gęstości gazu, a wi
żeli zauważymy, że ciśnienie jest również wprost proporcjonalne do ci to wywołana oddziaływaniem cząsteczkowym zmiana ciśnienia musi bycjonalna do kwadratu koncentracji. Pozwala to zapisać zmodyfikowane równanie stanu
w formie znanej jako równanie Van der Waalsa:
to stałe odpowiednio uwzględniające zarówno siły przyciągania jak odpychania.
jest najważniejszym parametrem charakteryzująść ta oznaczamy prze U i definiujemy jako sumę
W termodynamice koncentrujemy się na dwóch składnikach energii wewnętrznej:ąsteczek wynikającej z ich chaotycznego ruchu ąsteczek wynikającej z ich wzajemnego oddziaływania
trzna układu jest funkcją stanu- zależy od opisujących układ paraW celu wyznaczenia energii wewnętrznej gazu doskonałego posługujemy si
średnia energia kinetyczna na każdy stopień swobody jest taka sama dla ½ kT.
zna ruchu postępowego cząsteczki jednoatomowej (posiadaj
. Natomiast cząsteczka dwuatomowa kształcie hantli (rys) ma picych z ruchu postępowego wzdłuż każdej z osi układu współrz
e dwóch dodatkowych będących efektem ruchu obrotowego wzdłuż osi dla których posiada ści :odpowiednio I1, I2.
75
.8) dobrze opisuje gazy rzeczywiste ale przy małych gęstościach. Przy ęść objętości dostępnej dla ści międzycząsteczkowe. ędnia te czynniki. Jeżeli
pna dla cząsteczek jest mniejsza pojedynczej cząsteczki, to objętość
Daje to zmodyfikowane
(11.9)
steczkami powoduje dalszą korektę do ści gazu, a więc również
wprost proporcjonalne do nienia musi być wprost
zmodyfikowane równanie stanu
(11.10)
gania jak odpychania.
niejszym parametrem charakteryzującym stan układu i definiujemy jako sumę wszystkich energii
(11.11)
trznej:
cej z ich wzajemnego oddziaływania
cych układ parametrów trznej gazu doskonałego posługujemy się
swobody jest taka sama dla
posiadającej trzy stopnie
steczka dwuatomowa kształcie hantli (rys) ma pięć dej z osi układu współrzędnych,
osi dla których posiada
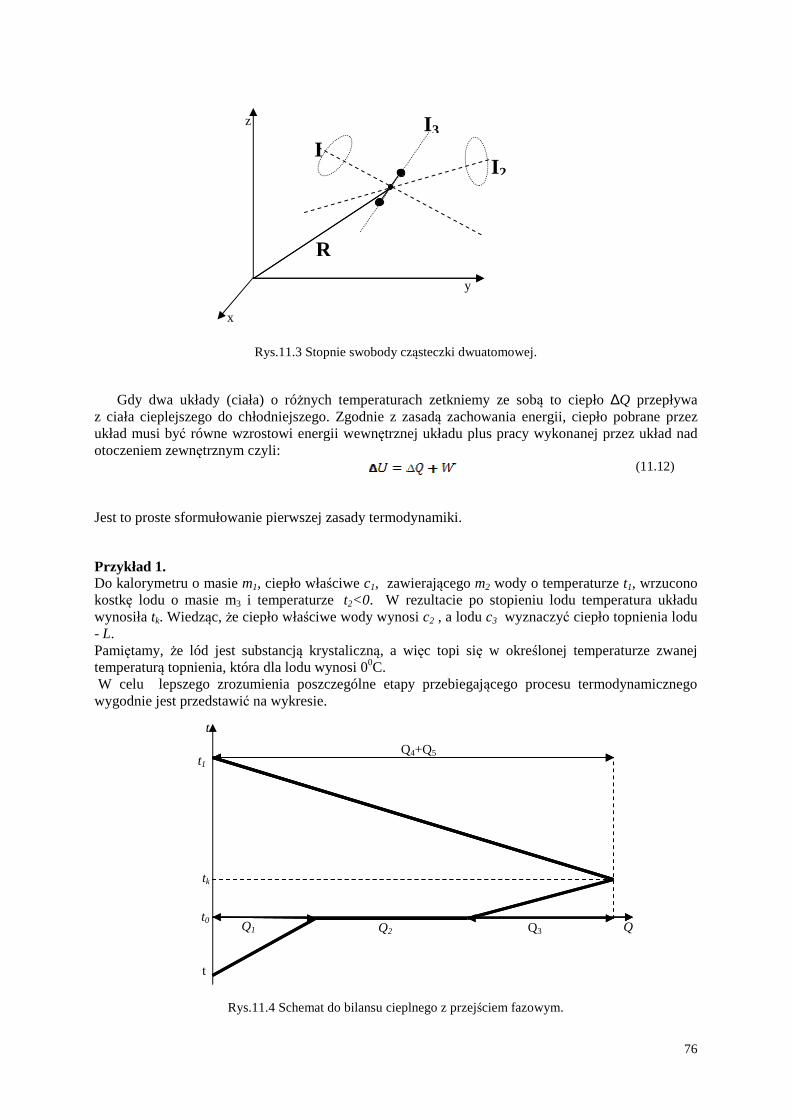
Rys.11.3
Gdy dwa układy (ciała) o róz ciała cieplejszego do chłodniejszego. Zgodnie z zasadukład musi być równe wzrostowi energii wewnotoczeniem zewnętrznym czyli:
Jest to proste sformułowanie pierwszej zasady termodynamiki. Przykład 1. Do kalorymetru o masie m1, ciepło włakostkę lodu o masie m3 i temperaturzewynosiła tk. Wiedząc, że ciepło wła- L. Pamiętamy, że lód jest substancjtemperaturą topnienia, która dla lodu wynosi 0 W celu lepszego zrozumienia poszczególne etapy przebiegajwygodnie jest przedstawić na wykresie.
Rys.11.4 Schemat do bilansu cieplnego z przej
x
z
Q1
t
t1
tk
t
t0
11.3 Stopnie swobody cząsteczki dwuatomowej.
Gdy dwa układy (ciała) o różnych temperaturach zetkniemy ze sobą to ciepło z ciała cieplejszego do chłodniejszego. Zgodnie z zasadą zachowania energii, ciepło pobrane przez
równe wzrostowi energii wewnętrznej układu plus pracy wykonanej przez układ nad
Jest to proste sformułowanie pierwszej zasady termodynamiki.
ciepło właściwe c1, zawierającego m2 wody o temperaturzei temperaturze t2<0. W rezultacie po stopieniu lodu temperatura układu
e ciepło właściwe wody wynosi c2 , a lodu c3 wyznaczyć ciepło topnienia lodu
e lód jest substancją krystaliczną, a więc topi się w określonej temperaturze zwanej topnienia, która dla lodu wynosi 00C.
W celu lepszego zrozumienia poszczególne etapy przebiegającego procesu termodynamicznego na wykresie.
Rys.11.4 Schemat do bilansu cieplnego z przejściem fazowym.
R
I I 2
I 3
y
Q2 Q3
Q4+Q5
76
to ciepło ∆Q przepływa zachowania energii, ciepło pobrane przez
trznej układu plus pracy wykonanej przez układ nad
(11.12)
wody o temperaturze t1, wrzucono rezultacie po stopieniu lodu temperatura układu
ć ciepło topnienia lodu
lonej temperaturze zwanej
cego procesu termodynamicznego
Q
77
Jak wynika z treści ciepło jest pobierane przez lód na: • Ogrzanie do temperatury topnienia - 3 = , ∆ = , 2 − 4
• Stopienie w stałej temperaturze topnienia - 3 =
• Ogrzanie wody, która powstała po stopieniu lodu od temperatury 00C do temperatury końcowej tk.-3 = ,2L − 4
Ciepło oddawane jest przez wodę znajdującą się w chwili początkowej w kalorymetrze - 3 = ,2 − L4 Oraz przez sam kalorymetr - 3S = ,2 − L4. Zgodnie z zasada zachowania energii, ciepło pobrane musi być równe ciepłu oddanemu co w rozważanej sytuacji daje: 3 + 3 + 3 = 3 + 3S. Podstawiając odpowiednie równania za poszczególne ciepła otrzymujemy: , 2 − 4 + + ,2L − 4 = ,2 − L4 + ,2 − L4. Jest to równanie pierwszego stopnia z jedną niewiadomą-L, tak że po prostych przekształceniach otrzymujemy:
= ,2 − L4 + ,2 − L4 − , 2 − 4 − ,2L − 4
12.Pole elektryczne
Kwantyzacja ładunku
Ładunek elementarny e = 1.6·10-19 C. Wszystkie ładunki są wielokrotnością e.
Zachowanie ładunku
Zasada zachowania ładunku - B. Franklin. Wypadkowy ładunek w układzie zamkniętym jest stały.
Prawo Coulomba
Ładunek elektryczny jest nieodłączną własnością niektórych cząstek elementarnych takich jak elektron czy proton. Ponieważ te cząstki są podstawowymi składnikami atomów każde ciało posiada ogromny ładunek elektryczny. Jednak ze względu na fakt, że ładunki protonu i elektronu zwane ładunkami elementarnymi są równe co do wartości, ale mają przeciwne znaki wypadkowy ładunek elektryczny nawet na poziomie atomu jest równy zero. Jeżeli jednak wytworzy się w ciele nadmiar ładunków jednego znaku ( na poziomie atomowym jest to zjawisko jonizacji) to ciało takie wykazuje własności elektryczne. Należy pamiętać że rozpatrując oddziaływania elektryczne pomiędzy ciałami bierzemy pod uwagę nie całkowity ładunek elektryczny zawarty w każdym z ciał, ale jedynie ładunek nadmiarowy. Oddziaływanie nieruchomych ładunków punktowych zostało opisane eksperymentalnie w 1785 roku przez Coulomba. Stwierdził on, że siła opisująca oddziaływanie dwóch nieruchomych, punktowych ładunków jest wprost proporcjonalne do każdego z tych ładunków i odwrotnie proporcjonalna do kwadratu odległości pomiędzy nimi (rys 12.1).
78
Rys. 12.1Oddziaływanie dwóch ładunków punktowych.
= 14n
(12.16)
Tutaj = 0.885 ∙ 10t ,
oznacza przenikalność elektryczną próżni. Siła ta jest siłą centralną, jeżeli więc wprowadzimy wektor jednostkowy:
r
rn
rr =
(12.17)
to możemy przepisać prawo Coulomba w aspekcie wektorowym:
= 14n
(12.18)
Okazało się, że znacznie wygodniej można opisywać oddziaływania pomiędzy ładunkami
wprowadzając pojęcie pola elektrycznego. Każdy ładunek zmienia bowiem własności otaczającej go przestrzeni co przejawia się w tym, że na każdy inny ładunek znajdujący się w tej przestrzeni działa siła natury elektrycznej. Istotny jest fakt, że chociaż pole elektryczne możemy badać umieszczając w nim dodatkowy ładunek (tzw. ładunek próbny, który zawsze jest dodatni), to pole istnieje bez względu na obecność tego dodatkowego ładunku. Podstawową wielkością opisującą pole elektryczne jest
natężenie pola elektrycznego Er
zdefiniowane jako siła działająca na jednostkowy ładunek umieszczony w danym punkcie pola. D = →
(12.21)
Zatem natężenie pola elektrycznego jest funkcją wektorową, która opisuje pole elektryczne w sposób jednoznaczny; każdemu punktowi pola przyporządkowany jest jeden i tylko jeden wektor natężenia pola Ładunek próbny na podstawie umowy jest zawsze dodatni. Kierunek D jest taki sam jak (na ładunek dodatni) W celu wyznaczenia wypadkowego natężenia pola elektrycznego pochodzącego od rozkładu ładunków korzystamy z zasady superpozycji(rys.12.2)
q0
x
y
z
q
r
n

79
∑∑−
−==
i i
ii
i
i
rr
rrqrErE
3'
'
0
)(
4
1)()( rr
rrrrrr
πε (12.24)
Rys.12.2 Zasada superpozycji
Kierunek pola E w przestrzeni można przedstawić za pomocą tzw. linii sił. Linie nie tylko pokazują kierunek E ale też jego wartość (liczba linii na jednostkę powierzchni). Jeżeli liczbę linii przechodzących przez powierzchnię ∆S oznaczymy ∆φ to wówczas
αφ cosSErv
∆=∆
(12.26)
gdzie α jest kątem pomiędzy wektorem powierzchni Sr
∆ i wektorem Er
.
13.Pojemność elektryczna- kondensatory
Pojemność elektryczna C, U
qC = , jest liczbowo równa ładunkowi q, który przeniesiony na
przewodnik podnosi jego potencjał o 1V. Jednostką pojemności elektrycznej jest farrad
zdefiniowany poprzez relację:V
CF =1 . Przewodniki odosobnione mają niewielką pojemność
elektryczną; na przykład przewodząca kula o promieniu równym promieniowi Ziemi miałaby pojemność rzędu kilkuset .Fµ Jednak w wielu praktycznych zagadnieniach z elektroniki potrzebujemy elementów zdolnych do wytwarzania i magazynowania znacznych wartości energii elektrycznej, a więc charakteryzujących się znaczną pojemnością elektryczną. Dlatego też kondensatory, które posiadają takie własności są zasadniczym elementem w większości praktycznych obwodów. Kondensatorem nazywamy przyrząd, który składa się z dwóch lub więcej przewodników (okładek) oddzielonych warstwą dielektryka. W celu wyeliminowania wpływu pól zewnętrznych okładkom kondensatora nadaje się taki kształt, że pole wytworzone przez ładunek znajdujący się na okładkach
1q 2q
3q
iq
'1rr
'irr
2rr
3rr
rr
'irrrr −
P
x
y
z
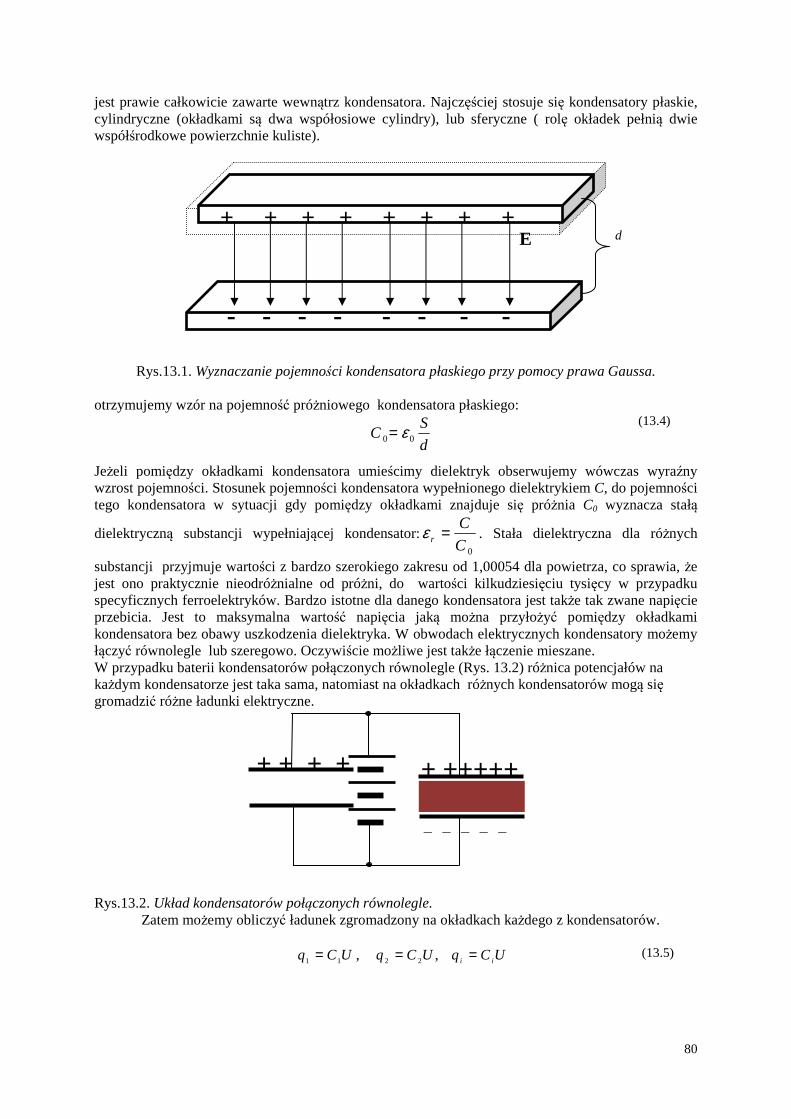
80
jest prawie całkowicie zawarte wewnątrz kondensatora. Najczęściej stosuje się kondensatory płaskie, cylindryczne (okładkami są dwa współosiowe cylindry), lub sferyczne ( rolę okładek pełnią dwie współśrodkowe powierzchnie kuliste).
Rys.13.1. Wyznaczanie pojemności kondensatora płaskiego przy pomocy prawa Gaussa.
otrzymujemy wzór na pojemność próżniowego kondensatora płaskiego:
d
SC 00 ε=
(13.4)
Jeżeli pomiędzy okładkami kondensatora umieścimy dielektryk obserwujemy wówczas wyraźny wzrost pojemności. Stosunek pojemności kondensatora wypełnionego dielektrykiem C, do pojemności tego kondensatora w sytuacji gdy pomiędzy okładkami znajduje się próżnia C0 wyznacza stałą
dielektryczną substancji wypełniającej kondensator:0C
Cr =ε . Stała dielektryczna dla różnych
substancji przyjmuje wartości z bardzo szerokiego zakresu od 1,00054 dla powietrza, co sprawia, że jest ono praktycznie nieodróżnialne od próżni, do wartości kilkudziesięciu tysięcy w przypadku specyficznych ferroelektryków. Bardzo istotne dla danego kondensatora jest także tak zwane napięcie przebicia. Jest to maksymalna wartość napięcia jaką można przyłożyć pomiędzy okładkami kondensatora bez obawy uszkodzenia dielektryka. W obwodach elektrycznych kondensatory możemy łączyć równolegle lub szeregowo. Oczywiście możliwe jest także łączenie mieszane. W przypadku baterii kondensatorów połączonych równolegle (Rys. 13.2) różnica potencjałów na każdym kondensatorze jest taka sama, natomiast na okładkach różnych kondensatorów mogą się gromadzić różne ładunki elektryczne. Rys.13.2. Układ kondensatorów połączonych równolegle.
Zatem możemy obliczyć ładunek zgromadzony na okładkach każdego z kondensatorów.
UCqUCqUCq ii === ,, 2211 (13.5)
+ + + + + + + +
- - - - - - - -
E d
+ + + +
- - - -
+ +++++
- - - - -
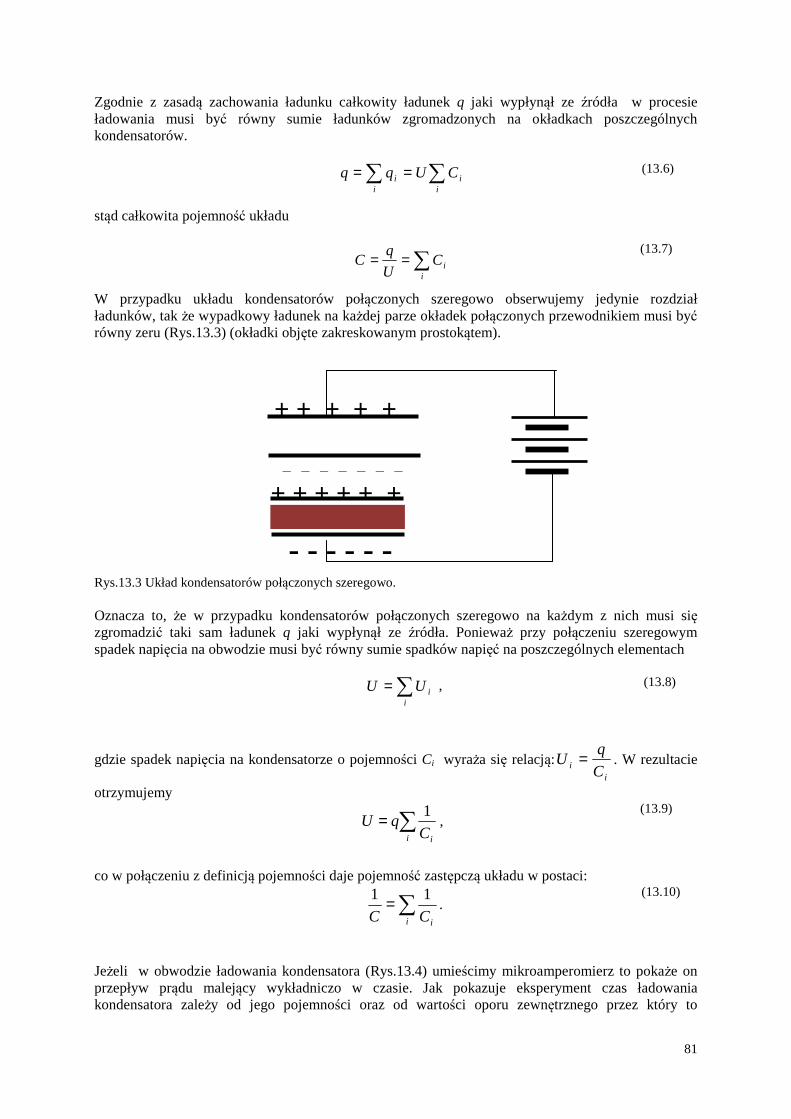
81
Zgodnie z zasadą zachowania ładunku całkowity ładunek q jaki wypłynął ze źródła w procesie ładowania musi być równy sumie ładunków zgromadzonych na okładkach poszczególnych kondensatorów.
∑∑ ==i
ii
i CUqq (13.6)
stąd całkowita pojemność układu
∑==
iiC
U
qC
(13.7)
W przypadku układu kondensatorów połączonych szeregowo obserwujemy jedynie rozdział ładunków, tak że wypadkowy ładunek na każdej parze okładek połączonych przewodnikiem musi być równy zeru (Rys.13.3) (okładki objęte zakreskowanym prostokątem). Rys.13.3 Układ kondensatorów połączonych szeregowo. Oznacza to, że w przypadku kondensatorów połączonych szeregowo na każdym z nich musi się zgromadzić taki sam ładunek q jaki wypłynął ze źródła. Ponieważ przy połączeniu szeregowym spadek napięcia na obwodzie musi być równy sumie spadków napięć na poszczególnych elementach
∑=i
iUU ,
(13.8)
gdzie spadek napięcia na kondensatorze o pojemności Ci wyraża się relacją:i
i C
qU = . W rezultacie
otrzymujemy
∑=i iC
qU1
, (13.9)
co w połączeniu z definicją pojemności daje pojemność zastępczą układu w postaci:
∑=
i iCC
11.
(13.10)
Jeżeli w obwodzie ładowania kondensatora (Rys.13.4) umieścimy mikroamperomierz to pokaże on przepływ prądu malejący wykładniczo w czasie. Jak pokazuje eksperyment czas ładowania kondensatora zależy od jego pojemności oraz od wartości oporu zewnętrznego przez który to
+ + + + +
- - - - - - - + + + + + +
- - - - - -
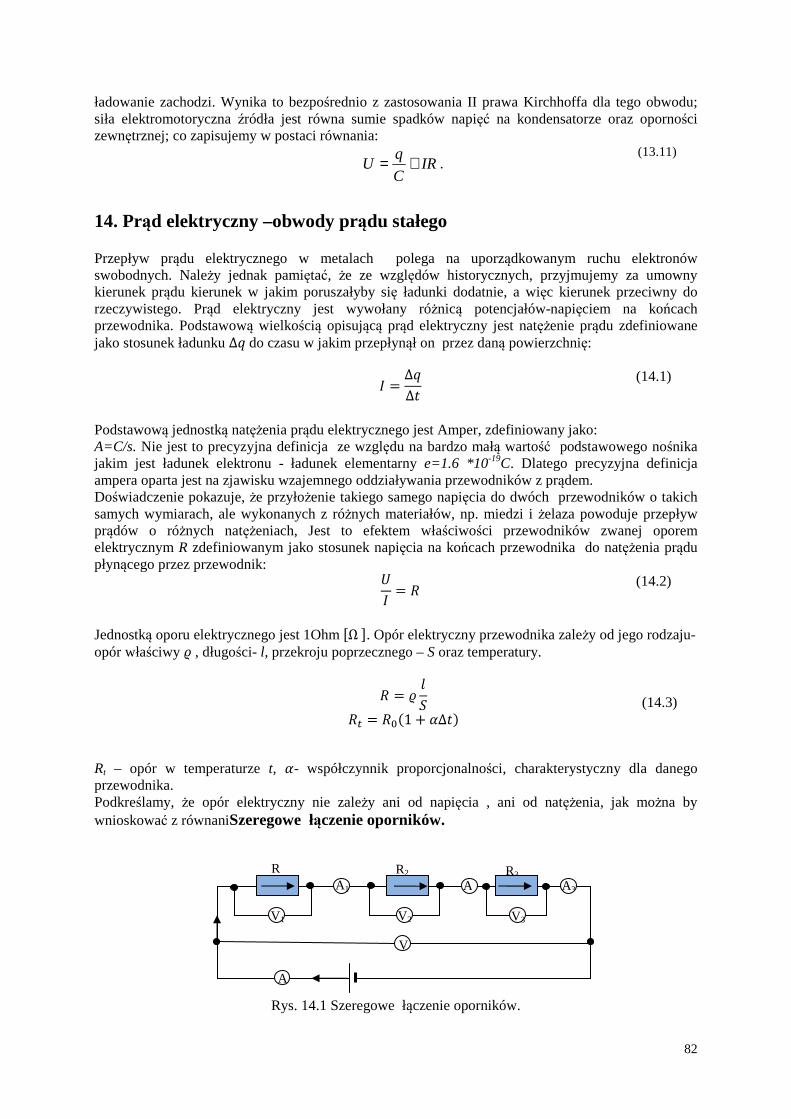
82
ładowanie zachodzi. Wynika to bezpośrednio z zastosowania II prawa Kirchhoffa dla tego obwodu; siła elektromotoryczna źródła jest równa sumie spadków napięć na kondensatorze oraz oporności zewnętrznej; co zapisujemy w postaci równania:
IR
C
qU += .
(13.11)
14. Prąd elektryczny –obwody prądu stałego Przepływ prądu elektrycznego w metalach polega na uporządkowanym ruchu elektronów swobodnych. Należy jednak pamiętać, że ze względów historycznych, przyjmujemy za umowny kierunek prądu kierunek w jakim poruszałyby się ładunki dodatnie, a więc kierunek przeciwny do rzeczywistego. Prąd elektryczny jest wywołany różnicą potencjałów-napięciem na końcach przewodnika. Podstawową wielkością opisującą prąd elektryczny jest natężenie prądu zdefiniowane jako stosunek ładunku ∆ do czasu w jakim przepłynął on przez daną powierzchnię:
Q = ∆∆
(14.1)
Podstawową jednostką natężenia prądu elektrycznego jest Amper, zdefiniowany jako: A=C/s. Nie jest to precyzyjna definicja ze względu na bardzo małą wartość podstawowego nośnika jakim jest ładunek elektronu - ładunek elementarny e=1.6 *10-19C. Dlatego precyzyjna definicja ampera oparta jest na zjawisku wzajemnego oddziaływania przewodników z prądem. Doświadczenie pokazuje, że przyłożenie takiego samego napięcia do dwóch przewodników o takich samych wymiarach, ale wykonanych z różnych materiałów, np. miedzi i żelaza powoduje przepływ prądów o różnych natężeniach, Jest to efektem właściwości przewodników zwanej oporem elektrycznym R zdefiniowanym jako stosunek napięcia na końcach przewodnika do natężenia prądu płynącego przez przewodnik:
Q =
(14.2)
Jednostką oporu elektrycznego jest 1Ohm Ω . Opór elektryczny przewodnika zależy od jego rodzaju- opór właściwy [ , długości- l, przekroju poprzecznego – S oraz temperatury.
= [ $ = 21 + .Δ4
(14.3)
Rt – opór w temperaturze t, .- współczynnik proporcjonalności, charakterystyczny dla danego przewodnika. Podkreślamy, że opór elektryczny nie zależy ani od napięcia , ani od natężenia, jak można by wnioskować z równaniSzeregowe łączenie oporników.
Rys. 14.1 Szeregowe łączenie oporników.
A1 A A3
A
V1 V2 V3
V
R R2 R3

83
Zwracamy uwagę, że amperomierz łączymy zawsze szeregowo, natomiast woltomierz równolegle. Przy szeregowym połączeniu elementów przez każdy płynie taki sam prąd. Wskazania amperomierzy A1, A2, A3 pokazujących prądy (I1, I2, I3 ) płynące przez odpowiednie oporniki są dokładnie takie same i równe prądowi I wypływającemu ze źródła ( pierwsze prawo Kirchhoffa)- amperomierz A.
Q = Q = Q = Q
(14.4)
Natomiast nie są sobie równe spadki napięć na poszczególnych opornikach. Wskazania woltomierzy V1,V2,V3 (U1,U2,U3) mogą być zupełnie różne. Jednak zawsze suma spadków napięć na poszczególnych elementach obwodu (w tym przypadku opornikach) musi być równa spadkowi napięcia na całym obwodzie U- wskazanie woltomierza V.
= + +
(14.5)
Zgodnie z prawem Ohma stosunek spadku napięcia na danym fragmencie obwodu do natężenia prądu płynącego w tym fragmencie jest nazywany oporem elektrycznym. Stąd wartość oporu elektrycznego pierwszego opornika obliczymy z relacji:
= Q
(14.6)
Analogicznie opory drugiego i trzeciego są równe:
= Q , = Q
(14.7)
W celu wyznaczenia oporu całego obwodu R należy podzielić spadek napięcia na całym obwodzie U- wskazanie woltomierza V, przez prąd I wypływający ze źródła.
= Q
(14.8)
Obliczając spadki napięć na poszczególnych elementach (równania ) i korzystając z relacji () otrzymujemy, że przy połączeniu szeregowym opór całkowity (wypadkowy) jest równy sumie oporów poszczególnych oporników:
= + + ,
(14.9)
lub ogólnie:
= ? @@
(14.10)
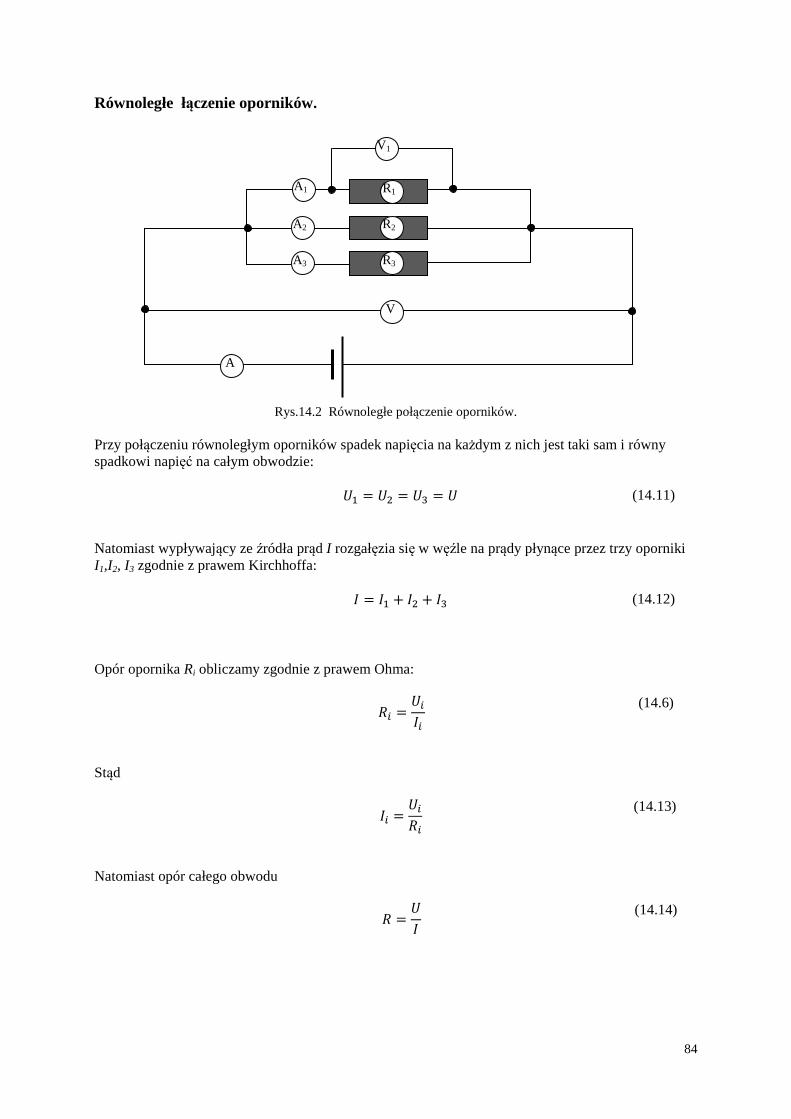
84
Równoległe łączenie oporników.
Rys.14.2 Równoległe połączenie oporników. Przy połączeniu równoległym oporników spadek napięcia na każdym z nich jest taki sam i równy spadkowi napięć na całym obwodzie:
= = =
(14.11)
Natomiast wypływający ze źródła prąd I rozgałęzia się w węźle na prądy płynące przez trzy oporniki I1,I2, I3 zgodnie z prawem Kirchhoffa:
Q = Q + Q + Q
(14.12)
Opór opornika Ri obliczamy zgodnie z prawem Ohma:
@ = @Q@
(14.6)
Stąd
Q@ = @@
(14.13)
Natomiast opór całego obwodu
= Q
(14.14)
A1
A2
A3
A
V1
R1
R2
R3
V
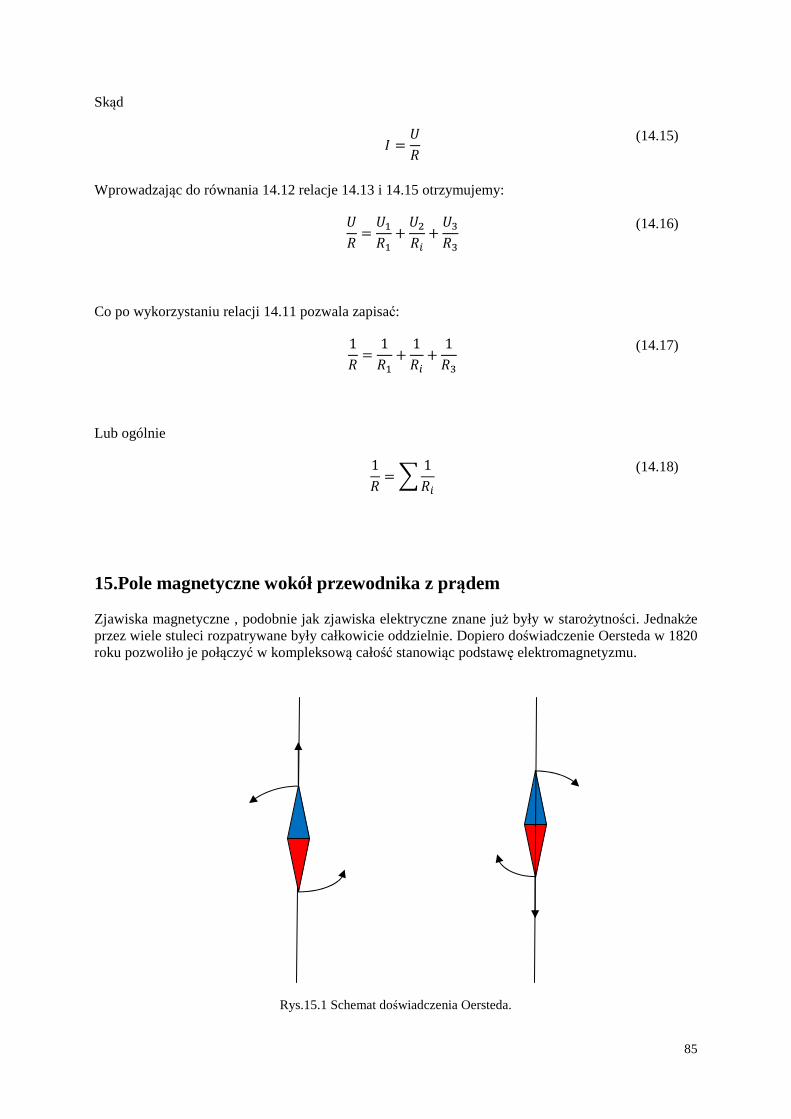
85
Skąd
Q =
(14.15)
Wprowadzając do równania 14.12 relacje 14.13 i 14.15 otrzymujemy: = + @ +
(14.16)
Co po wykorzystaniu relacji 14.11 pozwala zapisać:
1 = 1 + 1@ + 1
(14.17)
Lub ogólnie
1 = ? 1@
(14.18)
15.Pole magnetyczne wokół przewodnika z prądem Zjawiska magnetyczne , podobnie jak zjawiska elektryczne znane już były w starożytności. Jednakże przez wiele stuleci rozpatrywane były całkowicie oddzielnie. Dopiero doświadczenie Oersteda w 1820 roku pozwoliło je połączyć w kompleksową całość stanowiąc podstawę elektromagnetyzmu.
Rys.15.1 Schemat doświadczenia Oersteda.
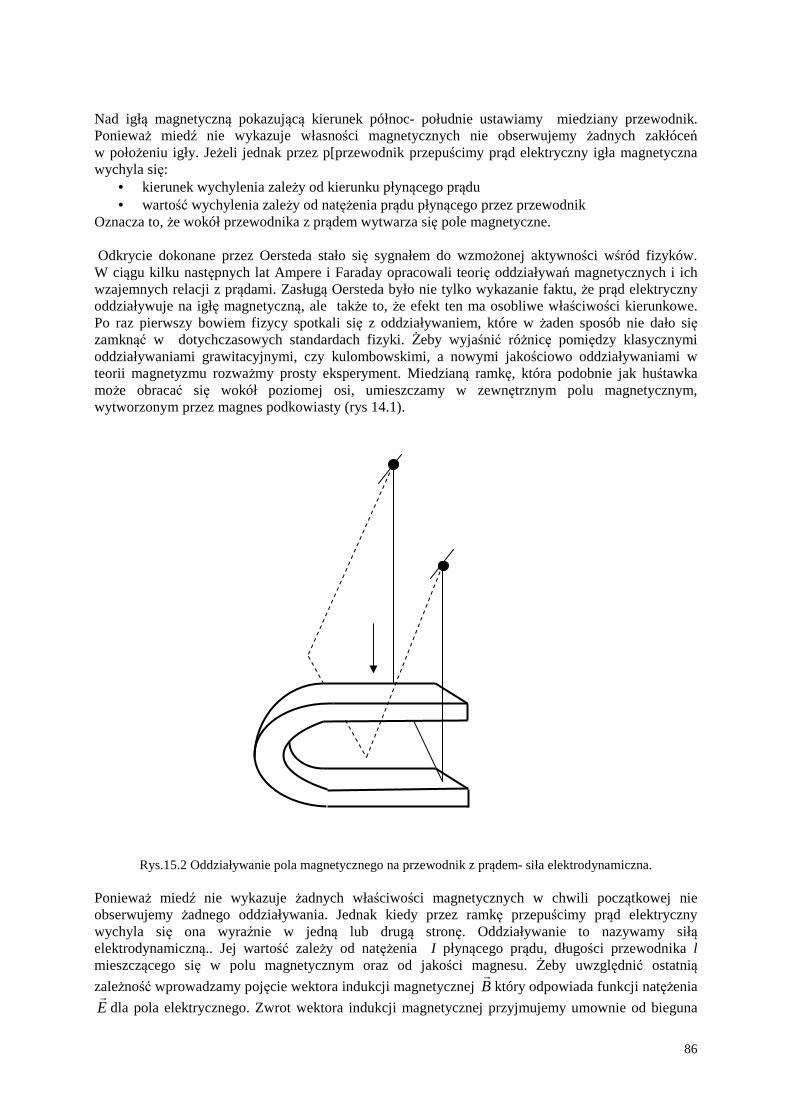
86
Nad igłą magnetyczną pokazującą kierunek północ- południe ustawiamy miedziany przewodnik. Ponieważ miedź nie wykazuje własności magnetycznych nie obserwujemy żadnych zakłóceń w położeniu igły. Jeżeli jednak przez p[przewodnik przepuścimy prąd elektryczny igła magnetyczna wychyla się:
• kierunek wychylenia zależy od kierunku płynącego prądu • wartość wychylenia zależy od natężenia prądu płynącego przez przewodnik
Oznacza to, że wokół przewodnika z prądem wytwarza się pole magnetyczne. Odkrycie dokonane przez Oersteda stało się sygnałem do wzmożonej aktywności wśród fizyków. W ciągu kilku następnych lat Ampere i Faraday opracowali teorię oddziaływań magnetycznych i ich wzajemnych relacji z prądami. Zasługą Oersteda było nie tylko wykazanie faktu, że prąd elektryczny oddziaływuje na igłę magnetyczną, ale także to, że efekt ten ma osobliwe właściwości kierunkowe. Po raz pierwszy bowiem fizycy spotkali się z oddziaływaniem, które w żaden sposób nie dało się zamknąć w dotychczasowych standardach fizyki. Żeby wyjaśnić różnicę pomiędzy klasycznymi oddziaływaniami grawitacyjnymi, czy kulombowskimi, a nowymi jakościowo oddziaływaniami w teorii magnetyzmu rozważmy prosty eksperyment. Miedzianą ramkę, która podobnie jak huśtawka może obracać się wokół poziomej osi, umieszczamy w zewnętrznym polu magnetycznym, wytworzonym przez magnes podkowiasty (rys 14.1).
Rys.15.2 Oddziaływanie pola magnetycznego na przewodnik z prądem- siła elektrodynamiczna. Ponieważ miedź nie wykazuje żadnych właściwości magnetycznych w chwili początkowej nie obserwujemy żadnego oddziaływania. Jednak kiedy przez ramkę przepuścimy prąd elektryczny wychyla się ona wyraźnie w jedną lub drugą stronę. Oddziaływanie to nazywamy siłą elektrodynamiczną.. Jej wartość zależy od natężenia I płynącego prądu, długości przewodnika l mieszczącego się w polu magnetycznym oraz od jakości magnesu. Żeby uwzględnić ostatnią
zależność wprowadzamy pojęcie wektora indukcji magnetycznej Br
który odpowiada funkcji natężenia
Er
dla pola elektrycznego. Zwrot wektora indukcji magnetycznej przyjmujemy umownie od bieguna
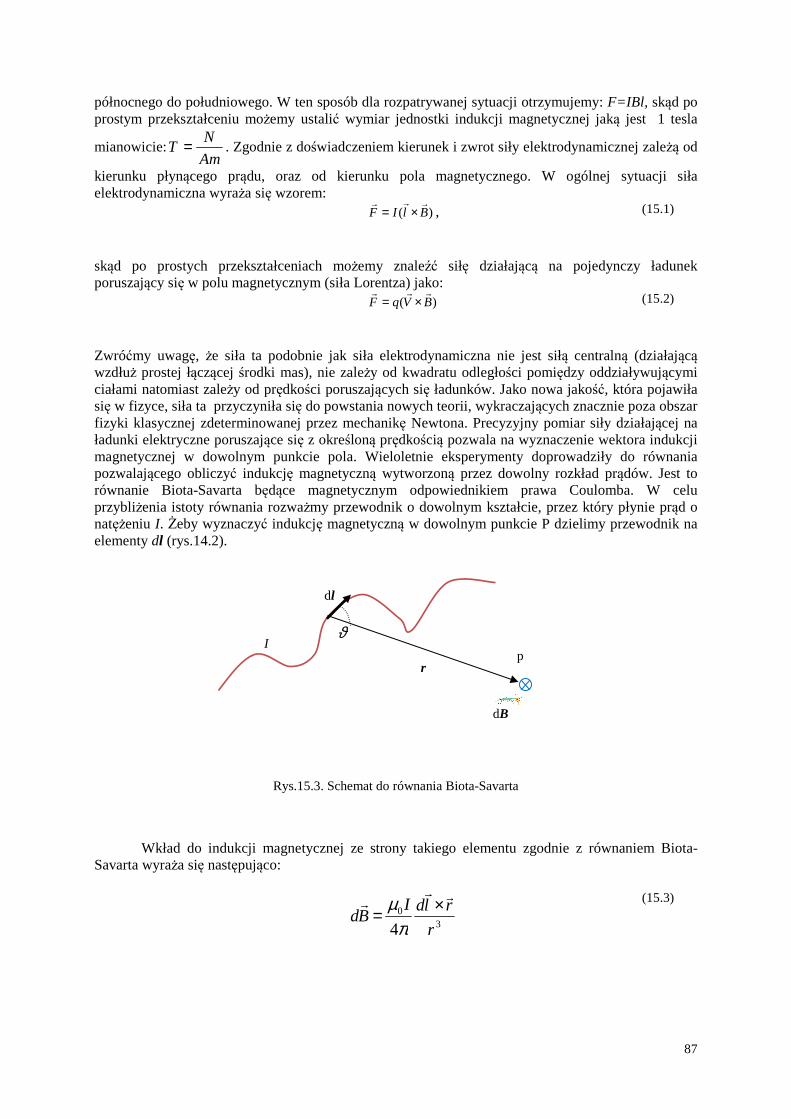
87
północnego do południowego. W ten sposób dla rozpatrywanej sytuacji otrzymujemy: F=IBl, skąd po prostym przekształceniu możemy ustalić wymiar jednostki indukcji magnetycznej jaką jest 1 tesla
mianowicie:Am
NT = . Zgodnie z doświadczeniem kierunek i zwrot siły elektrodynamicznej zależą od
kierunku płynącego prądu, oraz od kierunku pola magnetycznego. W ogólnej sytuacji siła elektrodynamiczna wyraża się wzorem:
)( BlIFrrr
×= ,
(15.1)
skąd po prostych przekształceniach możemy znaleźć siłę działającą na pojedynczy ładunek poruszający się w polu magnetycznym (siła Lorentza) jako:
)( BVqFrrr
×=
(15.2)
Zwróćmy uwagę, że siła ta podobnie jak siła elektrodynamiczna nie jest siłą centralną (działającą wzdłuż prostej łączącej środki mas), nie zależy od kwadratu odległości pomiędzy oddziaływującymi ciałami natomiast zależy od prędkości poruszających się ładunków. Jako nowa jakość, która pojawiła się w fizyce, siła ta przyczyniła się do powstania nowych teorii, wykraczających znacznie poza obszar fizyki klasycznej zdeterminowanej przez mechanikę Newtona. Precyzyjny pomiar siły działającej na ładunki elektryczne poruszające się z określoną prędkością pozwala na wyznaczenie wektora indukcji magnetycznej w dowolnym punkcie pola. Wieloletnie eksperymenty doprowadziły do równania pozwalającego obliczyć indukcję magnetyczną wytworzoną przez dowolny rozkład prądów. Jest to równanie Biota-Savarta będące magnetycznym odpowiednikiem prawa Coulomba. W celu przybliżenia istoty równania rozważmy przewodnik o dowolnym kształcie, przez który płynie prąd o natężeniu I. Żeby wyznaczyć indukcję magnetyczną w dowolnym punkcie P dzielimy przewodnik na elementy dl (rys.14.2).
Rys.15.3. Schemat do równania Biota-Savarta
Wkład do indukcji magnetycznej ze strony takiego elementu zgodnie z równaniem Biota-
Savarta wyraża się następująco:
30
4 r
rldIBd
rrr ×=
πµ
(15.3)
dB
p r
ϑ
dl
I
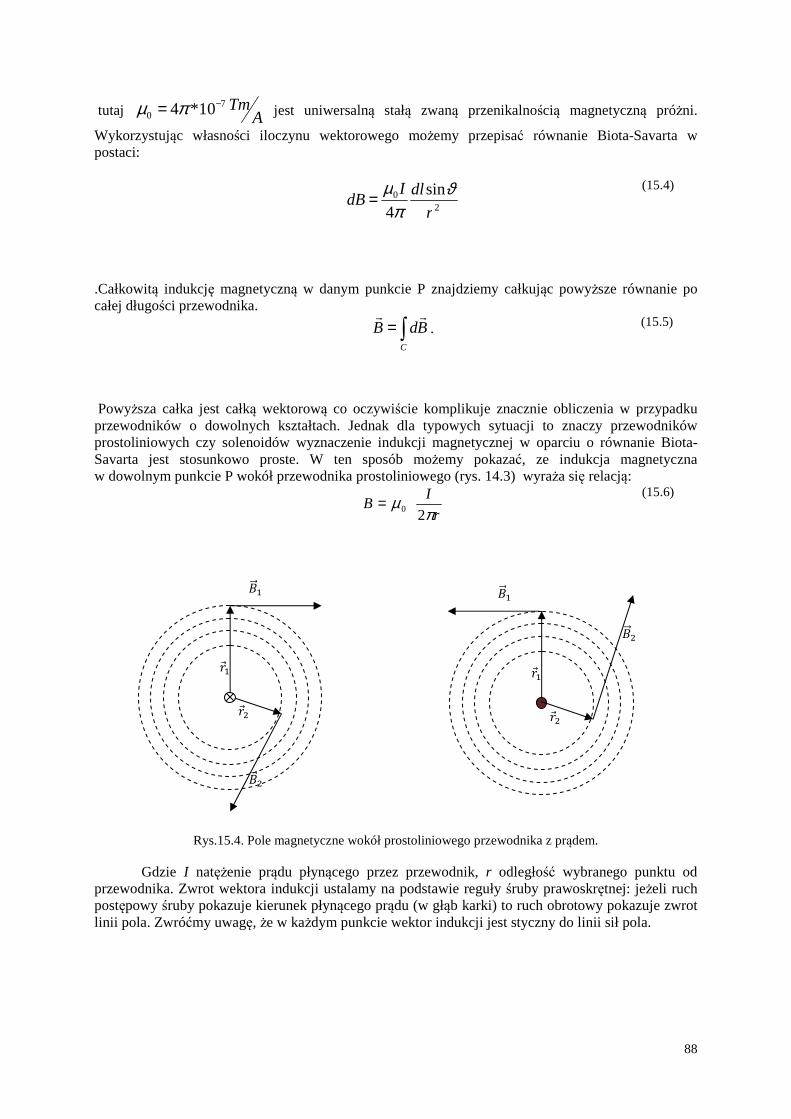
88
tutaj ATm7
0 10*4 −= πµ jest uniwersalną stałą zwaną przenikalnością magnetyczną próżni.
Wykorzystując własności iloczynu wektorowego możemy przepisać równanie Biota-Savarta w postaci:
20 sin
4 r
dlIdB
ϑπ
µ=
(15.4)
.Całkowitą indukcję magnetyczną w danym punkcie P znajdziemy całkując powyższe równanie po całej długości przewodnika.
∫=C
BdBrr
. (15.5)
Powyższa całka jest całką wektorową co oczywiście komplikuje znacznie obliczenia w przypadku przewodników o dowolnych kształtach. Jednak dla typowych sytuacji to znaczy przewodników prostoliniowych czy solenoidów wyznaczenie indukcji magnetycznej w oparciu o równanie Biota-Savarta jest stosunkowo proste. W ten sposób możemy pokazać, ze indukcja magnetyczna w dowolnym punkcie P wokół przewodnika prostoliniowego (rys. 14.3) wyraża się relacją:
r
IB
πµ
20= (15.6)
Rys.15.4. Pole magnetyczne wokół prostoliniowego przewodnika z prądem.
Gdzie I natężenie prądu płynącego przez przewodnik, r odległość wybranego punktu od przewodnika. Zwrot wektora indukcji ustalamy na podstawie reguły śruby prawoskrętnej: jeżeli ruch postępowy śruby pokazuje kierunek płynącego prądu (w głąb karki) to ruch obrotowy pokazuje zwrot linii pola. Zwróćmy uwagę, że w każdym punkcie wektor indukcji jest styczny do linii sił pola.
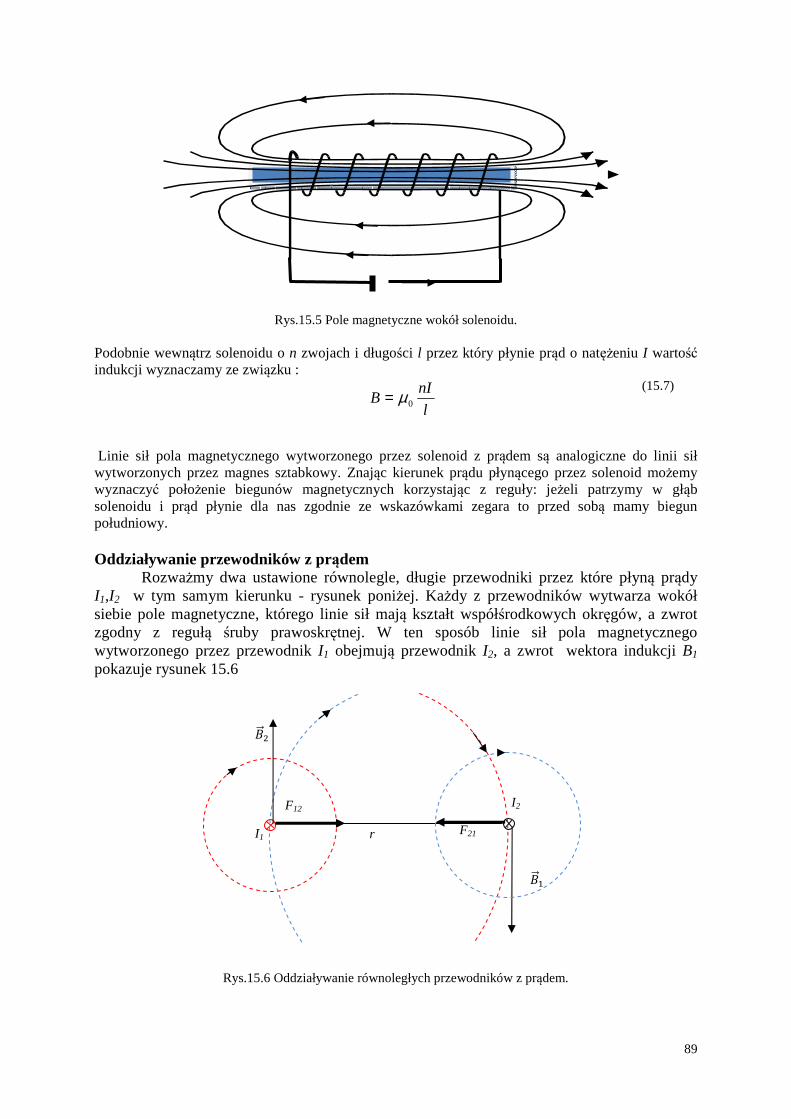
89
Rys.15.5 Pole magnetyczne wokół solenoidu. Podobnie wewnątrz solenoidu o n zwojach i długości l przez który płynie prąd o natężeniu I wartość indukcji wyznaczamy ze związku :
l
nIB 0µ=
(15.7)
Linie sił pola magnetycznego wytworzonego przez solenoid z prądem są analogiczne do linii sił wytworzonych przez magnes sztabkowy. Znając kierunek prądu płynącego przez solenoid możemy wyznaczyć położenie biegunów magnetycznych korzystając z reguły: jeżeli patrzymy w głąb solenoidu i prąd płynie dla nas zgodnie ze wskazówkami zegara to przed sobą mamy biegun południowy. Oddziaływanie przewodników z prądem
Rozważmy dwa ustawione równolegle, długie przewodniki przez które płyną prądy I1,I2 w tym samym kierunku - rysunek poniżej. Każdy z przewodników wytwarza wokół siebie pole magnetyczne, którego linie sił mają kształt współśrodkowych okręgów, a zwrot zgodny z regułą śruby prawoskrętnej. W ten sposób linie sił pola magnetycznego wytworzonego przez przewodnik I1 obejmują przewodnik I2, a zwrot wektora indukcji B1 pokazuje rysunek 15.6
Rys.15.6 Oddziaływanie równoległych przewodników z prądem.
r
F12
F21 I1
I2

90
Stosując równanie 15.1 możemy wyznaczyć wartość , także kierunek i zwrot siły F21 z jaką pierwszy przewodnik oddziaływuje na drugi. Analogiczne rozważanie możemy przeprowadzić odnośnie pola magnetycznego wytworzonego przez przewodnik I2 i jego oddziaływania na pierwszy z przewodników. Siła elektrodynamiczna F12 z jaką to pole oddziaływuje na przewodnik I1 ma kierunek i zwrot jak na rysunku. Oznacza to, ze rozważane przewodniki przyciągają się wzajemnie. Takie same rozważania możemy powtórzyć dla dowolnych kierunków w jakich płyną prądy w obu przewodnikach, a w rezultacie otrzymać formułę, która mówi, że jeżeli prądy w obu przewodnikach płyną w tym samym kierunku przewodniki przyciągają się, natomiast jeżeli prądy płyną w kierunkach przeciwnych przewodniki odpychają się wzajemnie.
Rys.15.7 Wzajemne oddziaływanie przewodników z prądem.
We wszystkich powyższych równaniach opisujących indukcję magnetyczną wokół przewodników z prądem występuje przenikalność magnetyczna próżni. Wynika to z przyjętej konwencji definiującej indukcję magnetyczną na podstawie pomiaru siły działającej na jednostkowy ładunek lub jednostkowy przewodnik z prądem. W tej sytuacji indukcja magnetyczna zależy także od ośrodka w którym to pole występuje. W celu wyeliminowania wpływu ośrodka wprowadza się czasami pojęcie natężenia pola
magnetycznego Hr
związanego z wektorem indukcji następującą relacją: HBrr
0µ= . Jego jednostką
jestm
A, a odnosi się ono wyłącznie do pola spowodowanego przez prądy płynące przez przewodnik.
Wprowadzenie ferromagnetycznego rdzenia do solenoidu powoduje znaczne zwiększenie indukcji magnetycznej i stanowi podstawę do określenia względnej przenikalności magnetycznej substancjirµ :
0B
Br =µ gdzie B0 oznacza wartość indukcji bez rdzenia , natomiast B jest indukcją magnetyczną tego
samego solenoidu z rdzeniem ferromagnetycznym. W celu wyeksponowania wkładu do indukcji ze strony rdzenia zapiszmy ostatnią relację w postaci:
000 BBBB r −+= µ (15.8)
a następnie po elementarnych przekształceniach otrzymujemy:
00)1( BBB r +−= µ . (15.9)
Struktura tego równania pozwala traktować pierwszy składnik po prawej stronie jako właśnie szukany wkład do indukcji ze strony substancji wypełniającej solenoid. Często wprowadza się pojęcie
F12 F21
I1 I2
F12 F21
I1 I2

91
podatności magnetycznej 1−= rµκ , co pozwala zapisać ostatnią relację w postaci: 00 BBB κ+= .Ze
względu na ;podatność magnetyczną wszystkie substancje dzielimy na diamagnetyki )0( <κ , paramagnetyki )0( >κ i ferromagnetyki )1( >>κ . Jeżeli przez solenoid z rdzeniem przepuścimy prąd elektryczny to poprzez zmiany natężenia tego prądu spowodujemy zmiany natężenia pola magnetycznego H. Następnie mierząc wartość indukcji magnetycznej B odpowiadającej każdej wartości natężenia pola możemy ustalić wartość
H
BHr
0
)(µ
µ = . (15.10)
dla każdej pary B i H. W ten sposób jesteśmy w stanie wykreślić krzywą namagnesowania, która dla typowego ferromagnetyka ma kształt jak na (rys. 4).
Rys.15.8. Krzywa namagnesowania dla typowego ferromagnetyka
Wynika stąd, że w ten sposób zdefiniowana względna przenikalność magnetyczna nie jest dla ferromagnetyka wielkością stałą, ale zmienia się wraz ze zmianą natężenia pola magnetycznego H. Początkowo rośnie wraz ze wzrostem pola osiągając maksimum, a następnie maleje przy dalszym wzroście pola dążąc do jedności w obszarze nasycenia , które odpowiada całkowitemu uporządkowaniu domen w próbce. Dla pewnych ferromagnetyków względna przenikalność magnetyczna może dla odpowiednich wartości pola H osiągać wartości rzędu 106. Przenikalność magnetyczna mierzona w stałym polu magnetycznym nosząca nazwę przenikalności statycznej może różnić się bardzo wyraźnie od przenikalności magnetycznej tej samej substancji, ale mierzonej w polu zmiennym- przenikalność dynamiczna. Wynika to z obecności prądów wirowych, lepkości magnetycznej, a także pewnych efektów rezonansowych jakie występują w obecności zmiennych pól.
Dlatego wprowadza się tak zwaną przenikalność magnetyczną początkową 0rµ , zdefiniowaną jako
H
BH
r0
0
0 limµ
µ→
= . (15.11)
i równą nachyleniu krzywej namagnesowania w punkcie H=0, lub ze względów praktycznych przenikalność różniczkową.
dH
dBrr
0
1
µµ = .
(15.12)
rµ
1
H
10
102
103

92
Właściwości magnetyczne substancji. Już na początku XIX stulecia, pod wpływem odkrycia Oersteda i własnych prac Ampere zasugerował, że pola magnetyczne wokół magnesów trwałych są wynikiem prądów płynących wewnątrz tych ciał. Przypuszczenia genialnego fizyka okazały się generalnie słuszne, chociaż żeby wniknąć w istotę magnetyzmu fizycy musieli poznać strukturę atomu. Pełny obraz zjawisk magnetycznych oddaje dopiero teoria kwantowa, która wprowadza fundamentalne pojęcie spinu elektronu, natomiast w ramach teorii klasycznej jesteśmy w stanie podać wyłącznie przybliżony opis zjawiska. Zgodnie z teorią klasyczną elektron poruszający się wokół jądra możemy traktować jako zamknięty obwód z prądem, a jak wiemy każdy prąd wytwarza wokół siebie pole magnetyczne. Ponieważ elektron porusza się w przybliżeniu po orbicie kołowej odpowiadające mu pole magnetyczne jest zbliżone do pola wytworzonego wokół przewodnika o takim kształcie (solenoid o jednym zwoju). Oznacza to, że takie elementarne pole magnetyczne wytworzone przez pojedynczy elektron posiada dwa bieguny magnetyczne, co wyjaśnia brak w przyrodzie monopoli magnetycznych. Moment magnetyczny dla obwodu z prądem zdefiniowany jest przez równanie:
nISMrr
= (15.13)
gdzie I natężenie prądu, S pole powierzchni, natomiast n
roznacza jednostkowy wektor prostopadły do
powierzchni. Jego zwrot jest związany z kierunkiem prądu w obwodzie regułą śruby prawoskrętnej. Przyjmując, że promień orbity po której porusza się elektron wynosi r, natomiast odpowiadające mu
natężenie prądu: T
eI = , e- ładunek elementarny, T- okres , możemy wyznaczyć odpowiadający mu
moment magnetyczny:
nrrT
eM
rr2π=
(15.14)
. Skąd po prostych przekształceniach otrzymujemy:
oLm
eM
rr
2=
(15.15)
gdzie m oznacza masę elektronu, natomiast Lr
o orbitalny moment pędu. Każdy elektron obok
orbitalnego momentu pędu posiada także spinowy moment pędu Lr
s i odpowiadający mu spinowy
moment magnetyczny Mr
s , zatem wypadkowy moment magnetyczny elektronu Mr
= Mr
o +Mr
s. Zatem dla atomu posiadającego Z elektronów na orbitach wypadkowy moment magnetyczny jest sumą
∑∑ +=
Z
ios
Z
ioia MMM
rrr
(15.16)
Wartość wypadkowego momentu magnetycznego dla atomów, które mają całkowicie ,zapełnione podpowłoki elektronowe jest równa zeru w nieobecności zewnętrznego pola magnetycznego. Gazy składające się z takich atomów czy cząsteczek nazywamy diamagnetykami. Do nich zaliczamy jednoatomowe gazy szlachetne, niektóre gazy o cząsteczkach dwuatomowych takie jak chlor czy wodór, oraz pary pierwiastków z tego szeregu metali. W obecności zewnętrznego pola magnetycznego atomy substancji diamagnetycznych wytwarzają własne , bardzo słabe pole magnetyczne, które jest przeciwnie skierowane do pola zewnętrznego. Substancje zbudowane z atomów, których podpowłoki elektronowe nie są całkowicie zapełnione zwane są paramagnetykami. Ich atomy posiadają własny, niezerowy moment magnetyczny. Gdy nie występuje pole zewnętrzne kierunki tych momentów są ustawione zupełnie przypadkowo, co sprawia , że substancje paramagnetyczne nie wykazują na zewnątrz żadnych własności magnetycznych. Zewnętrzne pole magnetyczne stara się uporządkować orientację atomowych momentów magnetycznych paramagnetyka, czemu przeszkadza chaotyczny ruch cieplny. W rezultacie w przypadku substancji paramagnetycznych średni moment magnetyczny jaki uzyskują atomy jest
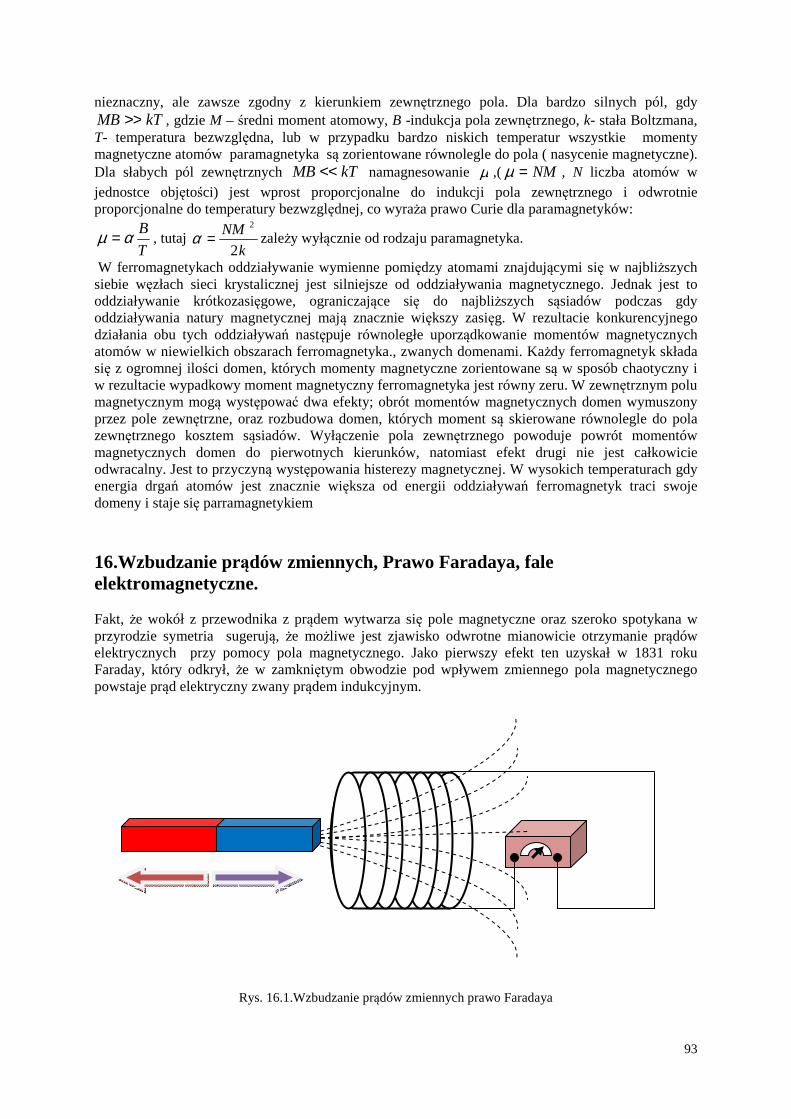
93
nieznaczny, ale zawsze zgodny z kierunkiem zewnętrznego pola. Dla bardzo silnych pól, gdykTMB >> , gdzie M – średni moment atomowy, B -indukcja pola zewnętrznego, k- stała Boltzmana,
T- temperatura bezwzględna, lub w przypadku bardzo niskich temperatur wszystkie momenty magnetyczne atomów paramagnetyka są zorientowane równolegle do pola ( nasycenie magnetyczne). Dla słabych pól zewnętrznych kTMB << namagnesowanie µ ,( NM=µ , N liczba atomów w jednostce objętości) jest wprost proporcjonalne do indukcji pola zewnętrznego i odwrotnie proporcjonalne do temperatury bezwzględnej, co wyraża prawo Curie dla paramagnetyków:
T
Bαµ = , tutaj k
NM
2
2
=α zależy wyłącznie od rodzaju paramagnetyka.
W ferromagnetykach oddziaływanie wymienne pomiędzy atomami znajdującymi się w najbliższych siebie węzłach sieci krystalicznej jest silniejsze od oddziaływania magnetycznego. Jednak jest to oddziaływanie krótkozasięgowe, ograniczające się do najbliższych sąsiadów podczas gdy oddziaływania natury magnetycznej mają znacznie większy zasięg. W rezultacie konkurencyjnego działania obu tych oddziaływań następuje równoległe uporządkowanie momentów magnetycznych atomów w niewielkich obszarach ferromagnetyka., zwanych domenami. Każdy ferromagnetyk składa się z ogromnej ilości domen, których momenty magnetyczne zorientowane są w sposób chaotyczny i w rezultacie wypadkowy moment magnetyczny ferromagnetyka jest równy zeru. W zewnętrznym polu magnetycznym mogą występować dwa efekty; obrót momentów magnetycznych domen wymuszony przez pole zewnętrzne, oraz rozbudowa domen, których moment są skierowane równolegle do pola zewnętrznego kosztem sąsiadów. Wyłączenie pola zewnętrznego powoduje powrót momentów magnetycznych domen do pierwotnych kierunków, natomiast efekt drugi nie jest całkowicie odwracalny. Jest to przyczyną występowania histerezy magnetycznej. W wysokich temperaturach gdy energia drgań atomów jest znacznie większa od energii oddziaływań ferromagnetyk traci swoje domeny i staje się parramagnetykiem 16.Wzbudzanie prądów zmiennych, Prawo Faradaya, fale elektromagnetyczne. Fakt, że wokół z przewodnika z prądem wytwarza się pole magnetyczne oraz szeroko spotykana w przyrodzie symetria sugerują, że możliwe jest zjawisko odwrotne mianowicie otrzymanie prądów elektrycznych przy pomocy pola magnetycznego. Jako pierwszy efekt ten uzyskał w 1831 roku Faraday, który odkrył, że w zamkniętym obwodzie pod wpływem zmiennego pola magnetycznego powstaje prąd elektryczny zwany prądem indukcyjnym.
Rys. 16.1.Wzbudzanie prądów zmiennych prawo Faradaya
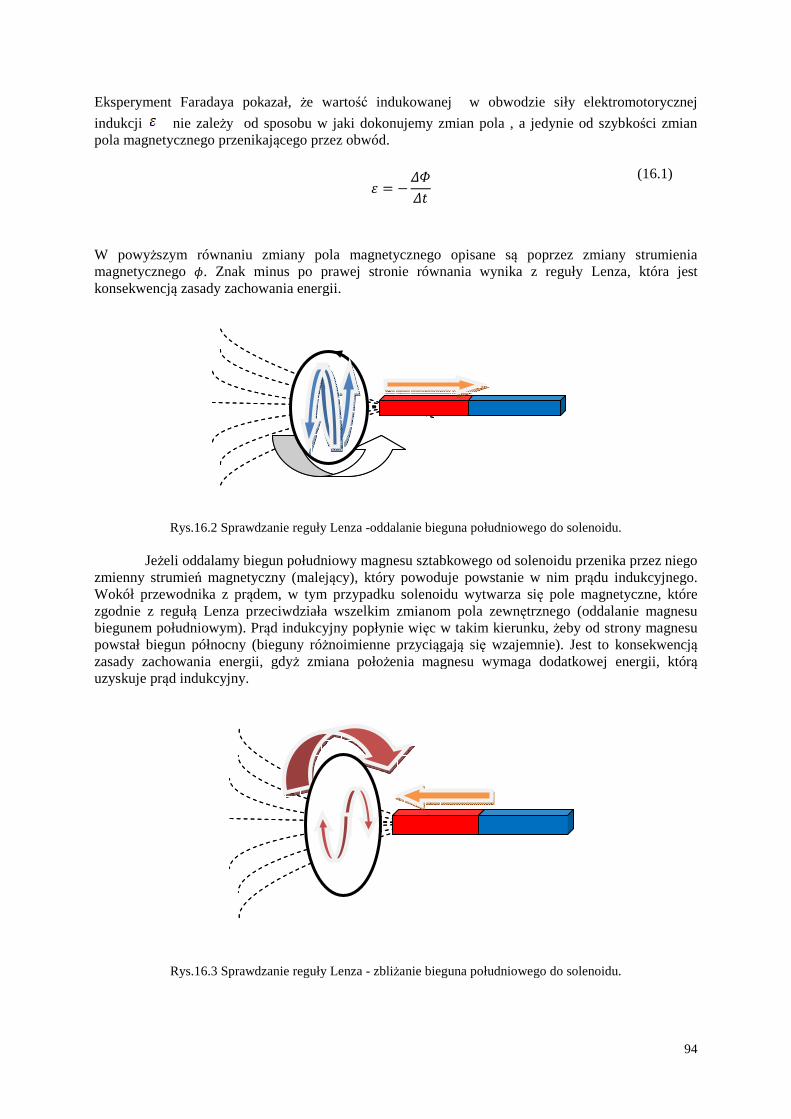
Eksperyment Faradaya pokazał,
indukcji nie zależy od sposobu w jaki dokonujemy zmian pola , a jedynie od szybkopola magnetycznego przenikającego przez obwód.
W powyższym równaniu zmiany pola magnetycznego opisane smagnetycznego . Znak minus po prawej stronie równania wynika z reguły Lenza, która jest konsekwencją zasady zachowania energii.
Rys.16.2 Sprawdzanie reguły Lenza Jeżeli oddalamy biegun południowy magnesu sztabkowego od solenoidu przenika przez niego
zmienny strumień magnetyczny (malejWokół przewodnika z prądem, w tym przypadku solenoidu wytwarza sizgodnie z regułą Lenza przeciwdziała wszelkim zmianom pola zewnbiegunem południowym). Prąd indukcyjny popłynie wipowstał biegun północny (bieguny rózasady zachowania energii, gdyżuzyskuje prąd indukcyjny.
Rys.16.3 Sprawdzanie reguły Lenza
Eksperyment Faradaya pokazał, że wartość indukowanej w obwodzie siły elektromotorycznej
y od sposobu w jaki dokonujemy zmian pola , a jedynie od szybkoącego przez obwód.
= −
szym równaniu zmiany pola magnetycznego opisane są poprzez zmiany strumi. Znak minus po prawej stronie równania wynika z reguły Lenza, która jest
zasady zachowania energii.
Sprawdzanie reguły Lenza -oddalanie bieguna południowego do solenoidu
lamy biegun południowy magnesu sztabkowego od solenoidu przenika przez niego magnetyczny (malejący), który powoduje powstanie w nim pr
dem, w tym przypadku solenoidu wytwarza się pole magnetyczne, kt Lenza przeciwdziała wszelkim zmianom pola zewnętrznego (oddalanie magnesu
ąd indukcyjny popłynie więc w takim kierunku, żeby od strony magnesu powstał biegun północny (bieguny różnoimienne przyciągają się wzajemnie). Jest to konsekwencjzasady zachowania energii, gdyż zmiana położenia magnesu wymaga dodatkowej energii, któr
Sprawdzanie reguły Lenza - zbliżanie bieguna południowego do solenoidu
94
indukowanej w obwodzie siły elektromotorycznej
y od sposobu w jaki dokonujemy zmian pola , a jedynie od szybkości zmian
(16.1)
poprzez zmiany strumienia . Znak minus po prawej stronie równania wynika z reguły Lenza, która jest
oddalanie bieguna południowego do solenoidu.
lamy biegun południowy magnesu sztabkowego od solenoidu przenika przez niego cy), który powoduje powstanie w nim prądu indukcyjnego.
pole magnetyczne, które trznego (oddalanie magnesu
żeby od strony magnesu mnie). Jest to konsekwencją
enia magnesu wymaga dodatkowej energii, którą
anie bieguna południowego do solenoidu.
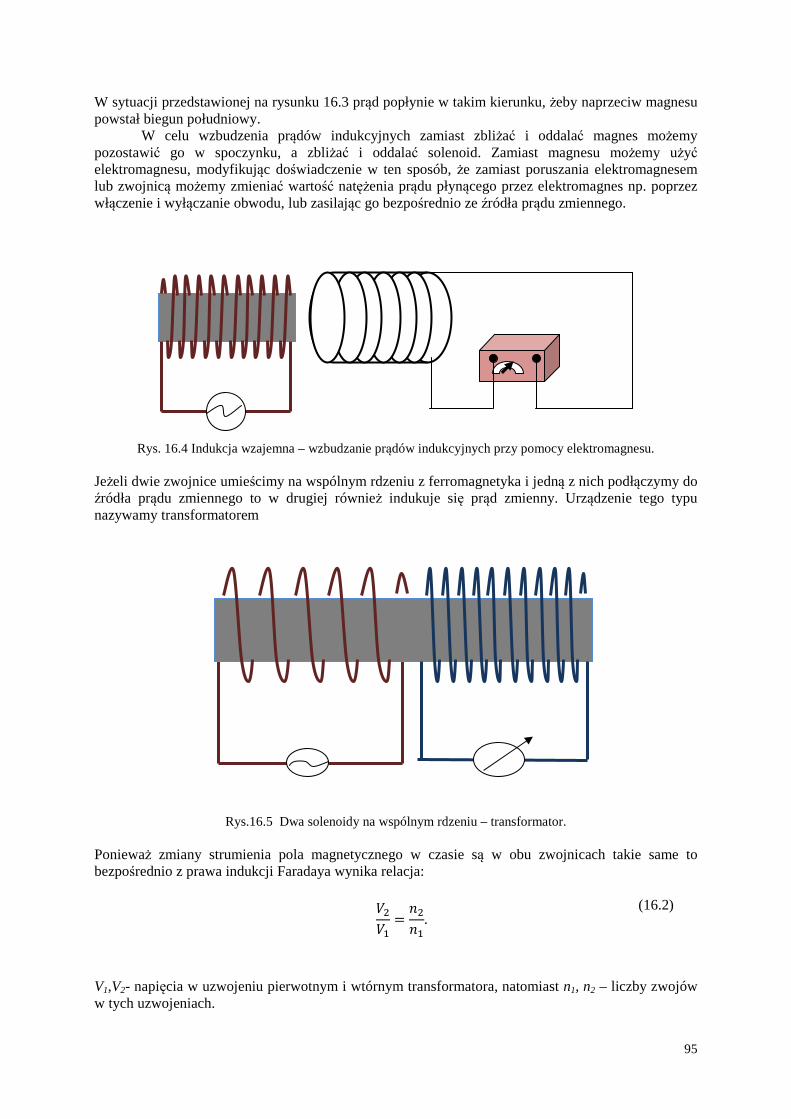
95
W sytuacji przedstawionej na rysunku 16.3 prąd popłynie w takim kierunku, żeby naprzeciw magnesu powstał biegun południowy.
W celu wzbudzenia prądów indukcyjnych zamiast zbliżać i oddalać magnes możemy pozostawić go w spoczynku, a zbliżać i oddalać solenoid. Zamiast magnesu możemy użyć elektromagnesu, modyfikując doświadczenie w ten sposób, że zamiast poruszania elektromagnesem lub zwojnicą możemy zmieniać wartość natężenia prądu płynącego przez elektromagnes np. poprzez włączenie i wyłączanie obwodu, lub zasilając go bezpośrednio ze źródła prądu zmiennego.
Rys. 16.4 Indukcja wzajemna – wzbudzanie prądów indukcyjnych przy pomocy elektromagnesu. Jeżeli dwie zwojnice umieścimy na wspólnym rdzeniu z ferromagnetyka i jedną z nich podłączymy do źródła prądu zmiennego to w drugiej również indukuje się prąd zmienny. Urządzenie tego typu nazywamy transformatorem
Rys.16.5 Dwa solenoidy na wspólnym rdzeniu – transformator. Ponieważ zmiany strumienia pola magnetycznego w czasie są w obu zwojnicach takie same to bezpośrednio z prawa indukcji Faradaya wynika relacja:
= 66.
(16.2)
V1,V2- napięcia w uzwojeniu pierwotnym i wtórnym transformatora, natomiast n1, n2 – liczby zwojów w tych uzwojeniach.
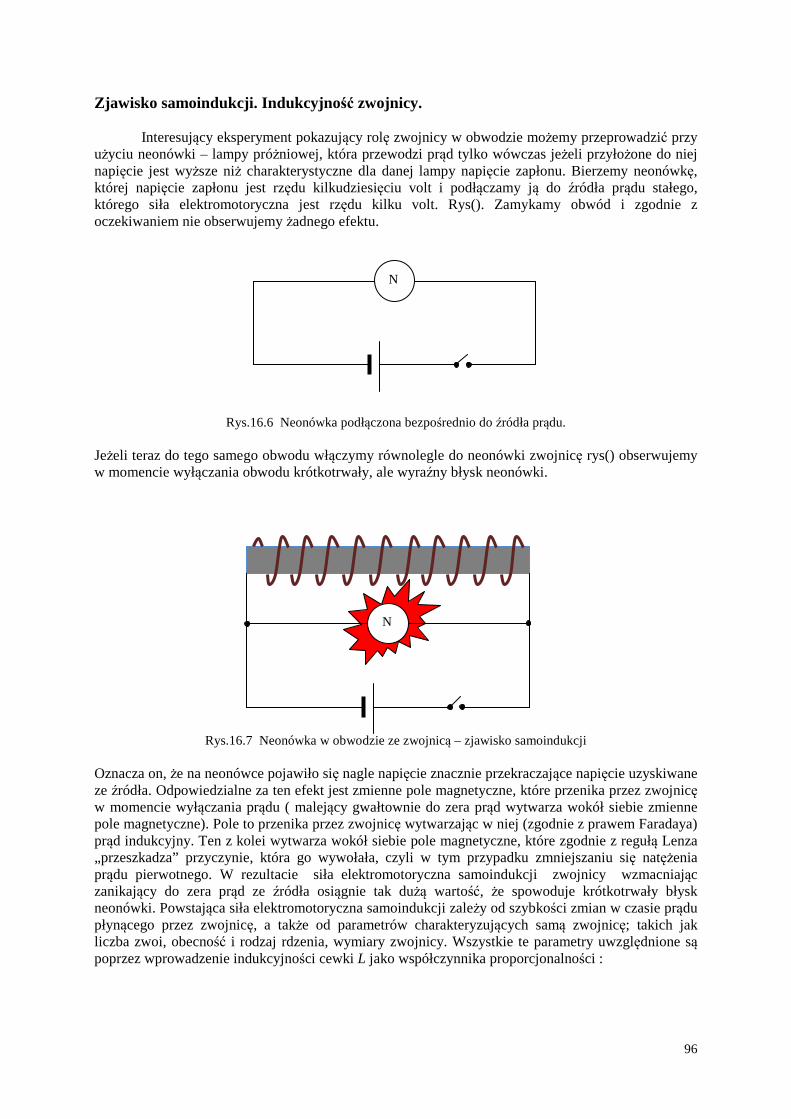
96
Zjawisko samoindukcji. Indukcyjno ść zwojnicy. Interesujący eksperyment pokazujący rolę zwojnicy w obwodzie możemy przeprowadzić przy
użyciu neonówki – lampy próżniowej, która przewodzi prąd tylko wówczas jeżeli przyłożone do niej napięcie jest wyższe niż charakterystyczne dla danej lampy napięcie zapłonu. Bierzemy neonówkę, której napięcie zapłonu jest rzędu kilkudziesięciu volt i podłączamy ją do źródła prądu stałego, którego siła elektromotoryczna jest rzędu kilku volt. Rys(). Zamykamy obwód i zgodnie z oczekiwaniem nie obserwujemy żadnego efektu.
Rys.16.6 Neonówka podłączona bezpośrednio do źródła prądu. Jeżeli teraz do tego samego obwodu włączymy równolegle do neonówki zwojnicę rys() obserwujemy w momencie wyłączania obwodu krótkotrwały, ale wyraźny błysk neonówki.
Rys.16.7 Neonówka w obwodzie ze zwojnicą – zjawisko samoindukcji Oznacza on, że na neonówce pojawiło się nagle napięcie znacznie przekraczające napięcie uzyskiwane ze źródła. Odpowiedzialne za ten efekt jest zmienne pole magnetyczne, które przenika przez zwojnicę w momencie wyłączania prądu ( malejący gwałtownie do zera prąd wytwarza wokół siebie zmienne pole magnetyczne). Pole to przenika przez zwojnicę wytwarzając w niej (zgodnie z prawem Faradaya) prąd indukcyjny. Ten z kolei wytwarza wokół siebie pole magnetyczne, które zgodnie z regułą Lenza „przeszkadza” przyczynie, która go wywołała, czyli w tym przypadku zmniejszaniu się natężenia prądu pierwotnego. W rezultacie siła elektromotoryczna samoindukcji zwojnicy wzmacniając zanikający do zera prąd ze źródła osiągnie tak dużą wartość, że spowoduje krótkotrwały błysk neonówki. Powstająca siła elektromotoryczna samoindukcji zależy od szybkości zmian w czasie prądu płynącego przez zwojnicę, a także od parametrów charakteryzujących samą zwojnicę; takich jak liczba zwoi, obecność i rodzaj rdzenia, wymiary zwojnicy. Wszystkie te parametry uwzględnione są poprzez wprowadzenie indukcyjności cewki L jako współczynnika proporcjonalności :
N
N
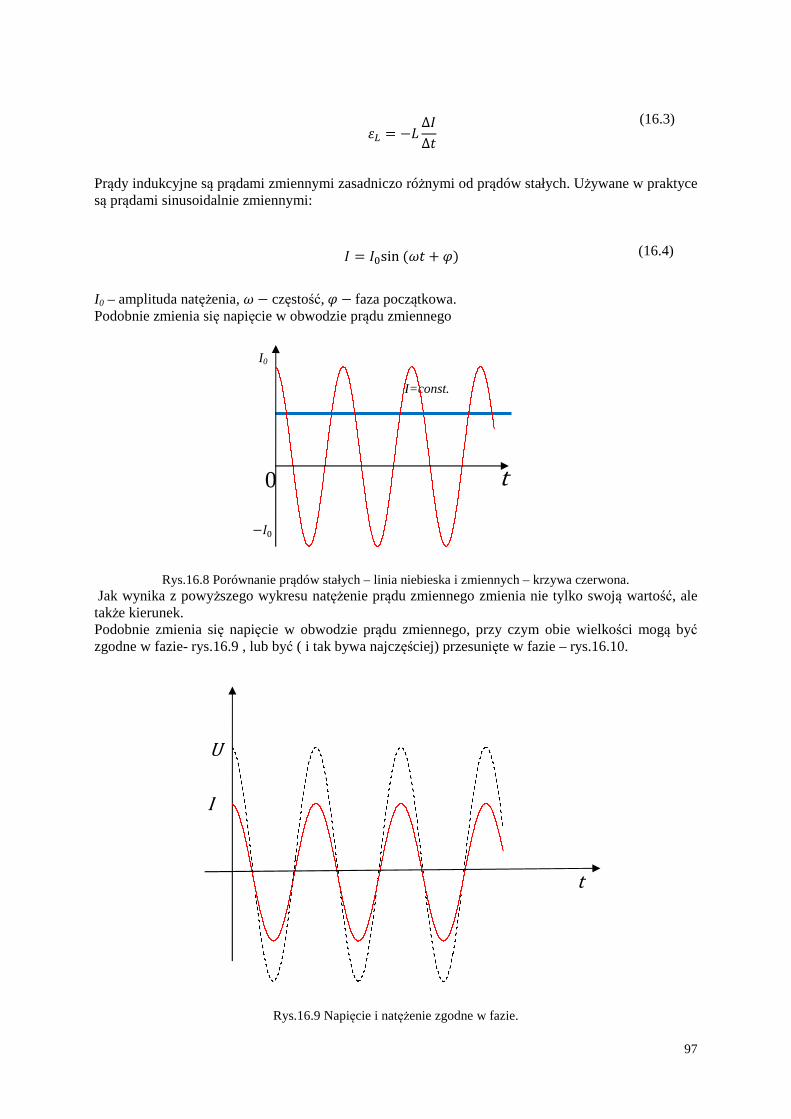
97
= − ΔQΔ
(16.3)
Prądy indukcyjne są prądami zmiennymi zasadniczo różnymi od prądów stałych. Używane w praktyce są prądami sinusoidalnie zmiennymi:
Q = Qsin 2R + x4
(16.4)
I0 – amplituda natężenia, R − częstość, x − faza początkowa. Podobnie zmienia się napięcie w obwodzie prądu zmiennego
Rys.16.8 Porównanie prądów stałych – linia niebieska i zmiennych – krzywa czerwona. Jak wynika z powyższego wykresu natężenie prądu zmiennego zmienia nie tylko swoją wartość, ale także kierunek. Podobnie zmienia się napięcie w obwodzie prądu zmiennego, przy czym obie wielkości mogą być zgodne w fazie- rys.16.9 , lub być ( i tak bywa najczęściej) przesunięte w fazie – rys.16.10.
Rys.16.9 Napięcie i natężenie zgodne w fazie.
−Q
t0
I0
I=const.
tIU
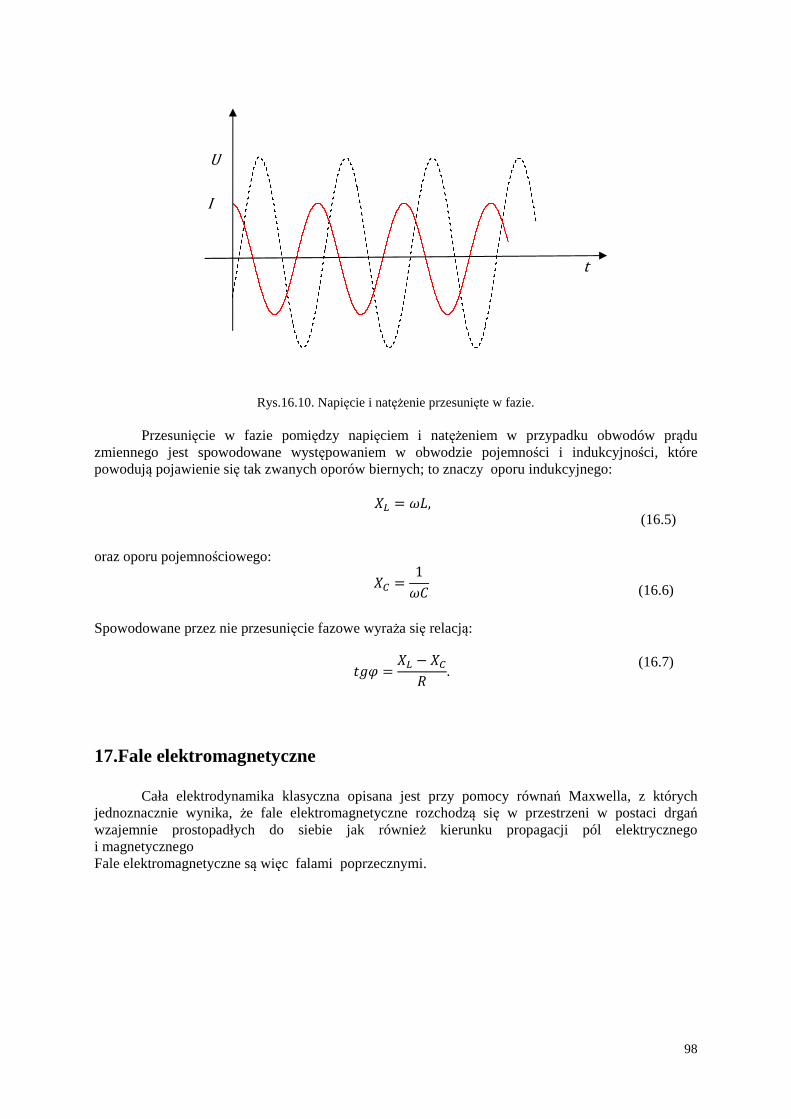
98
Rys.16.10. Napięcie i natężenie przesunięte w fazie.
Przesunięcie w fazie pomiędzy napięciem i natężeniem w przypadku obwodów prądu zmiennego jest spowodowane występowaniem w obwodzie pojemności i indukcyjności, które powodują pojawienie się tak zwanych oporów biernych; to znaczy oporu indukcyjnego:
= R,
(16.5)
oraz oporu pojemnościowego: M = 1R
(16.6)
Spowodowane przez nie przesunięcie fazowe wyraża się relacją:
+x = − M .
(16.7)
17.Fale elektromagnetyczne
Cała elektrodynamika klasyczna opisana jest przy pomocy równań Maxwella, z których jednoznacznie wynika, że fale elektromagnetyczne rozchodzą się w przestrzeni w postaci drgań wzajemnie prostopadłych do siebie jak również kierunku propagacji pól elektrycznego i magnetycznego Fale elektromagnetyczne są więc falami poprzecznymi.
tIU
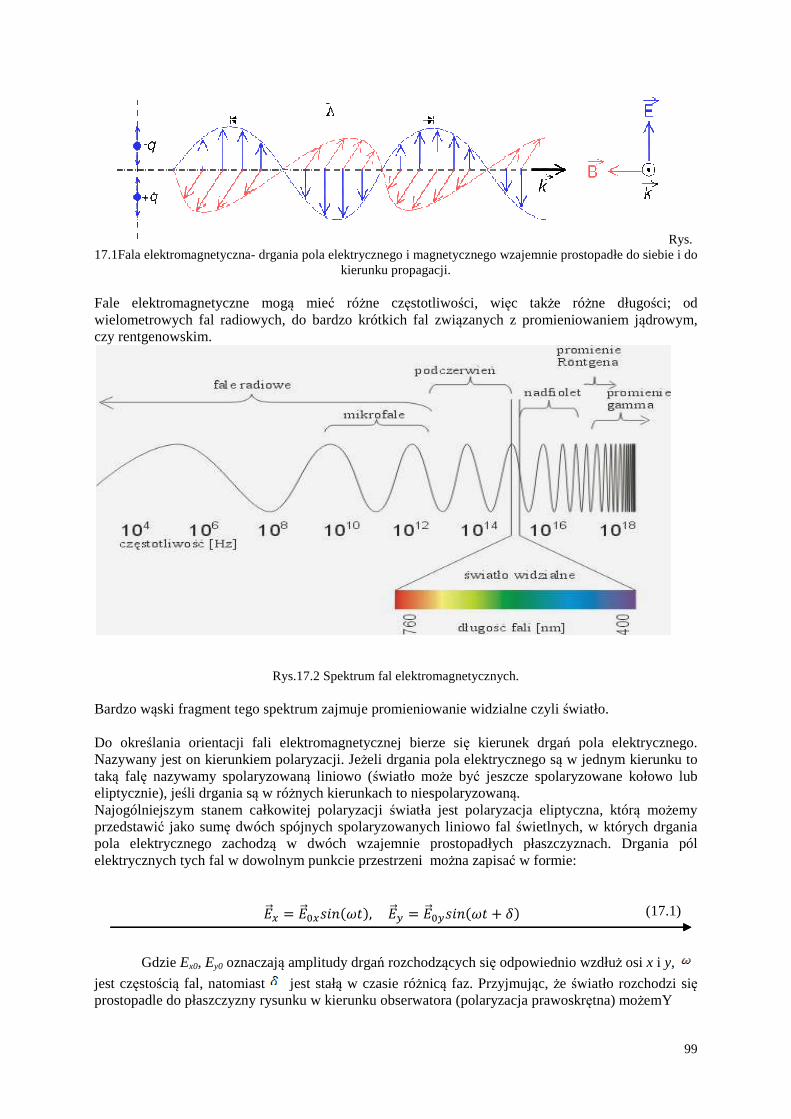
17.1Fala elektromagnetyczna- drgania pola elektrycznego i magnetycznego wz
Fale elektromagnetyczne mogąwielometrowych fal radiowych, do bardzo krótkich fal zwiczy rentgenowskim.
Rys.17.2 Spektrum fal elektromag Bardzo wąski fragment tego spektrum zajmuje promieniowanie widzialne czyli Do określania orientacji fali elektromagnetycznej bierze siNazywany jest on kierunkiem polaryzacji. Jetaką falę nazywamy spolaryzowaneliptycznie), jeśli drgania są w różNajogólniejszym stanem całkowitej polaryzacji przedstawić jako sumę dwóch spójnych spolaryzowanych liniowo fal pola elektrycznego zachodzą w dwóch wzajemnie prostopadłych płaszczyznach. Drgania pól elektrycznych tych fal w dowolnym punkcie przestrzeni mo
D= =
Gdzie Ex0, Ey0 oznaczają amplitudy drga
jest częstością fal, natomiast prostopadle do płaszczyzny rysunku w kierunku obserwatora (p
drgania pola elektrycznego i magnetycznego wzajemnie prostopadłe do siebie ikierunku propagacji.
Fale elektromagnetyczne mogą mieć różne częstotliwości, więc także rówielometrowych fal radiowych, do bardzo krótkich fal związanych z promieniowaniem j
Rys.17.2 Spektrum fal elektromagnetycznych.
ski fragment tego spektrum zajmuje promieniowanie widzialne czyli światło.
lania orientacji fali elektromagnetycznej bierze się kierunek drgań pola elektrycznego. Nazywany jest on kierunkiem polaryzacji. Jeżeli drgania pola elektrycznego są w jednym kierunku to
nazywamy spolaryzowaną liniowo (światło może być jeszcze spolaryzowane kołowo lub w różnych kierunkach to niespolaryzowaną.
Najogólniejszym stanem całkowitej polaryzacji światła jest polaryzacja eliptyczna, któr dwóch spójnych spolaryzowanych liniowo fal świetlnych, w których drgania
ą w dwóch wzajemnie prostopadłych płaszczyznach. Drgania pól nym punkcie przestrzeni można zapisać w formie:
= D=562R4, D = D562R + 4
oznaczają amplitudy drgań rozchodzących się odpowiednio wzdłu
jest stałą w czasie różnicą faz. Przyjmując, że śprostopadle do płaszczyzny rysunku w kierunku obserwatora (polaryzacja prawoskr
99
Rys. ajemnie prostopadłe do siebie i do
że różne długości; od zanych z promieniowaniem jądrowym,
ski fragment tego spektrum zajmuje promieniowanie widzialne czyli światło.
ń pola elektrycznego. ą w jednym kierunku to
jeszcze spolaryzowane kołowo lub
a jest polaryzacja eliptyczna, którą możemy wietlnych, w których drgania
w dwóch wzajemnie prostopadłych płaszczyznach. Drgania pól w formie:
(17.1)
odpowiednio wzdłuż osi x i y,
że światło rozchodzi się olaryzacja prawoskrętna) możemY

przedstawić orientację przestrzennelektrycznego .
Dzieląc powyższe równania przez odpowiednie amplitudy, a nasti dodając stronami otrzymujemy równanie elipsy w postaci:
Elipsa ta jest wpisana w prostoką
faz jest całkowitą wielokrotnościąsię polaryzacją liniową. Natomiast w sytuacji gdy ró
polaryzacja eliptyczna przekształca si
18.Elementy fizyki ciała stałego Struktury krystaliczne Kiedy pierwiastek lub związek chemiczny, bdostatecznie ochłodzony to kondensuje czyli przechodzi do stanu stałego.Większość związków ma strukturęzwany siecią krystaliczną. Np. ziarna soli kuchennej tworzelementarnym sześcianie pokazanym na rysunku poniodpowiednio małymi i dużymi kul
przestrzenną elipsy zakreślanej przez koniec wektora wypadkowego pola
Rys.15.4. Polaryzacja eliptyczna.
sze równania przez odpowiednie amplitudy, a następnie podnoszc stronami otrzymujemy równanie elipsy w postaci:
D=D= + DD − 2 D=DD=D ,- = 56
Elipsa ta jest wpisana w prostokąt o bokach równych podwojonym amplitudom drga
ścią , elipsa przekształca się w prostą i polaryzacja eliptyczna staj. Natomiast w sytuacji gdy różnica faz jest równa nieparzystej wielokrotno
polaryzacja eliptyczna przekształca się w polaryzację kołową.
ła stałego
ązek chemiczny, będący w stanie gazowym lub ciekłym, zostanie dostatecznie ochłodzony to kondensuje czyli przechodzi do stanu stałego.
zków ma strukturę krystaliczną. Atomy ułożone są w powtarzający si. Np. ziarna soli kuchennej tworzą sześciany oparte na powtarzaj
cianie pokazanym na rysunku poniżej. Pozycje atomów Na i Cl symi kulami.
Ex0
E
Ex
Ey
Ey0
0
100
ec wektora wypadkowego pola
pnie podnosząc do kwadratu
(17.2)
t o bokach równych podwojonym amplitudom drgań. Gdy różnica
i polaryzacja eliptyczna staję nica faz jest równa nieparzystej wielokrotności
cy w stanie gazowym lub ciekłym, zostanie
w powtarzający się regularny wzór ciany oparte na powtarzającym się
ej. Pozycje atomów Na i Cl są zaznaczone
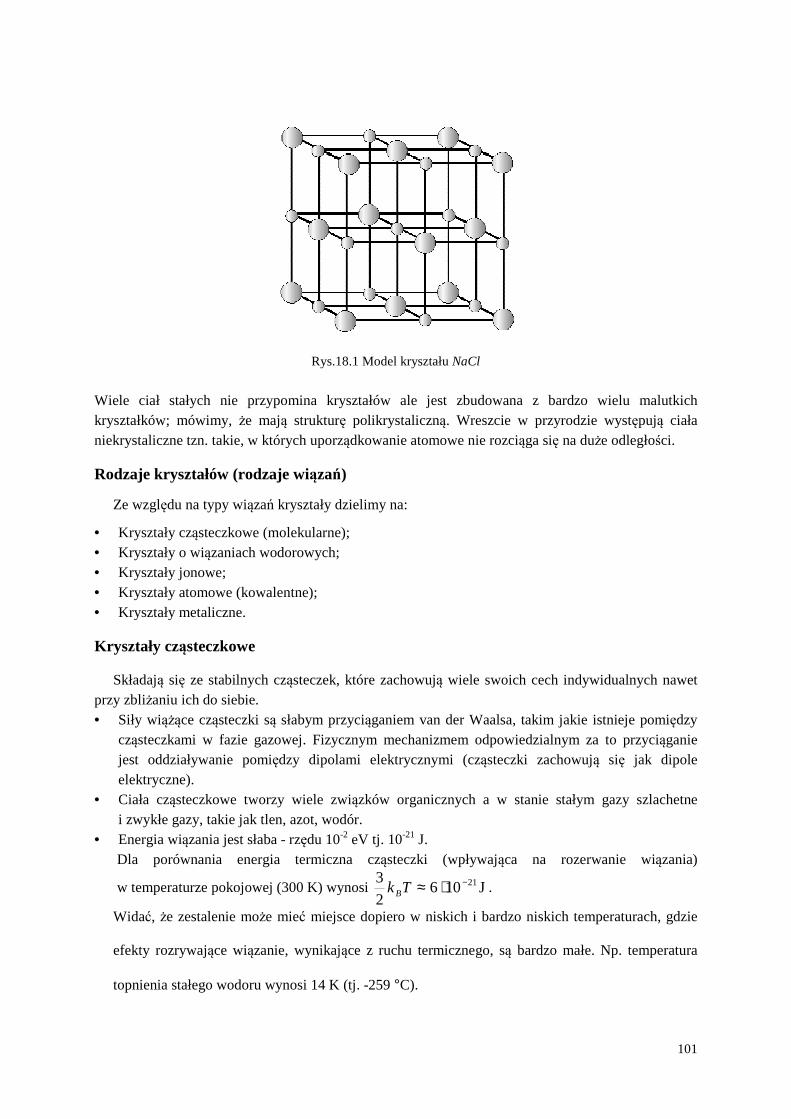
101
Rys.18.1 Model kryształu NaCl
Wiele ciał stałych nie przypomina kryształów ale jest zbudowana z bardzo wielu malutkich kryształków; mówimy, że mają strukturę polikrystaliczną. Wreszcie w przyrodzie występują ciała niekrystaliczne tzn. takie, w których uporządkowanie atomowe nie rozciąga się na duże odległości.
Rodzaje kryształów (rodzaje wiązań)
Ze względu na typy wiązań kryształy dzielimy na:
• Kryształy cząsteczkowe (molekularne); • Kryształy o wiązaniach wodorowych; • Kryształy jonowe; • Kryształy atomowe (kowalentne); • Kryształy metaliczne.
Kryształy cząsteczkowe
Składają się ze stabilnych cząsteczek, które zachowują wiele swoich cech indywidualnych nawet przy zbliżaniu ich do siebie. • Siły wiążące cząsteczki są słabym przyciąganiem van der Waalsa, takim jakie istnieje pomiędzy
cząsteczkami w fazie gazowej. Fizycznym mechanizmem odpowiedzialnym za to przyciąganie jest oddziaływanie pomiędzy dipolami elektrycznymi (cząsteczki zachowują się jak dipole elektryczne).
• Ciała cząsteczkowe tworzy wiele związków organicznych a w stanie stałym gazy szlachetne i zwykłe gazy, takie jak tlen, azot, wodór.
• Energia wiązania jest słaba - rzędu 10-2 eV tj. 10-21 J. Dla porównania energia termiczna cząsteczki (wpływająca na rozerwanie wiązania)
w temperaturze pokojowej (300 K) wynosi J1062
3 21−⋅≈TkB .
Widać, że zestalenie może mieć miejsce dopiero w niskich i bardzo niskich temperaturach, gdzie
efekty rozrywające wiązanie, wynikające z ruchu termicznego, są bardzo małe. Np. temperatura
topnienia stałego wodoru wynosi 14 K (tj. -259 °C).
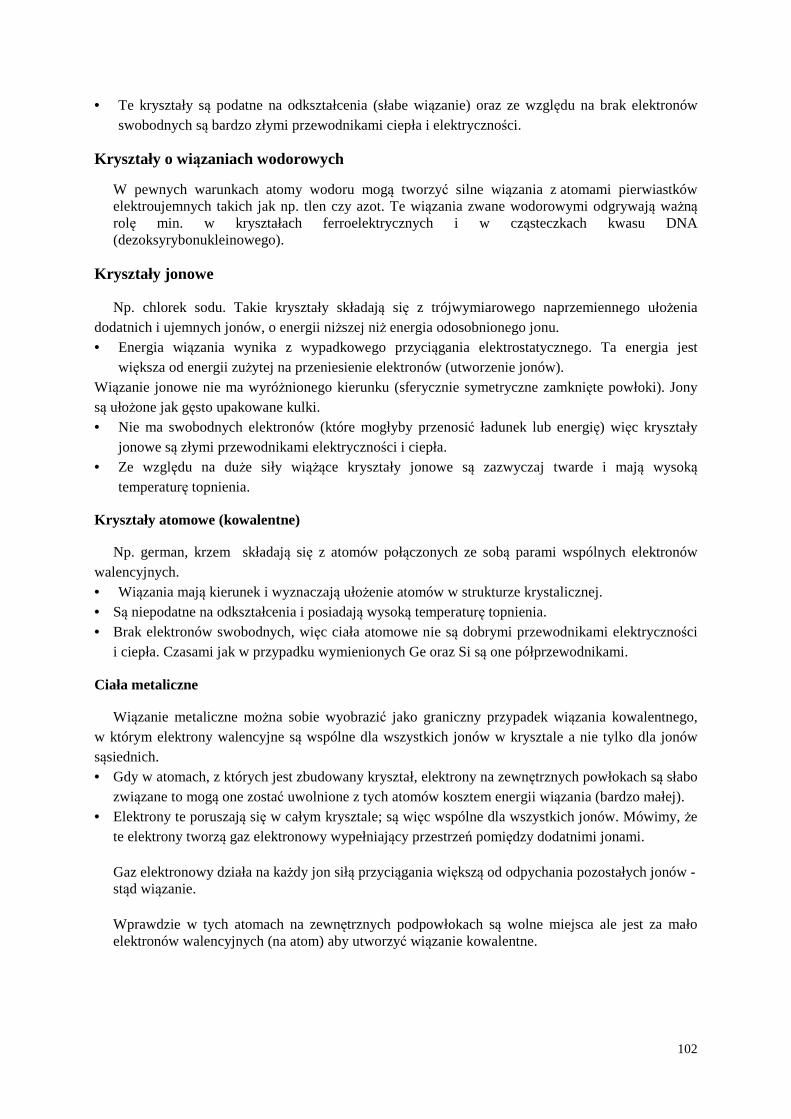
102
• Te kryształy są podatne na odkształcenia (słabe wiązanie) oraz ze względu na brak elektronów swobodnych są bardzo złymi przewodnikami ciepła i elektryczności.
Kryształy o wiązaniach wodorowych
W pewnych warunkach atomy wodoru mogą tworzyć silne wiązania z atomami pierwiastków elektroujemnych takich jak np. tlen czy azot. Te wiązania zwane wodorowymi odgrywają ważną rolę min. w kryształach ferroelektrycznych i w cząsteczkach kwasu DNA (dezoksyrybonukleinowego).
Kryształy jonowe
Np. chlorek sodu. Takie kryształy składają się z trójwymiarowego naprzemiennego ułożenia dodatnich i ujemnych jonów, o energii niższej niż energia odosobnionego jonu. • Energia wiązania wynika z wypadkowego przyciągania elektrostatycznego. Ta energia jest
większa od energii zużytej na przeniesienie elektronów (utworzenie jonów). Wiązanie jonowe nie ma wyróżnionego kierunku (sferycznie symetryczne zamknięte powłoki). Jony są ułożone jak gęsto upakowane kulki. • Nie ma swobodnych elektronów (które mogłyby przenosić ładunek lub energię) więc kryształy
jonowe są złymi przewodnikami elektryczności i ciepła. • Ze względu na duże siły wiążące kryształy jonowe są zazwyczaj twarde i mają wysoką
temperaturę topnienia.
Kryształy atomowe (kowalentne)
Np. german, krzem składają się z atomów połączonych ze sobą parami wspólnych elektronów walencyjnych. • Wiązania mają kierunek i wyznaczają ułożenie atomów w strukturze krystalicznej. • Są niepodatne na odkształcenia i posiadają wysoką temperaturę topnienia. • Brak elektronów swobodnych, więc ciała atomowe nie są dobrymi przewodnikami elektryczności
i ciepła. Czasami jak w przypadku wymienionych Ge oraz Si są one półprzewodnikami.
Ciała metaliczne
Wiązanie metaliczne można sobie wyobrazić jako graniczny przypadek wiązania kowalentnego, w którym elektrony walencyjne są wspólne dla wszystkich jonów w krysztale a nie tylko dla jonów sąsiednich. • Gdy w atomach, z których jest zbudowany kryształ, elektrony na zewnętrznych powłokach są słabo
związane to mogą one zostać uwolnione z tych atomów kosztem energii wiązania (bardzo małej). • Elektrony te poruszają się w całym krysztale; są więc wspólne dla wszystkich jonów. Mówimy, że
te elektrony tworzą gaz elektronowy wypełniający przestrzeń pomiędzy dodatnimi jonami.
Gaz elektronowy działa na każdy jon siłą przyciągania większą od odpychania pozostałych jonów - stąd wiązanie.
Wprawdzie w tych atomach na zewnętrznych podpowłokach są wolne miejsca ale jest za mało elektronów walencyjnych (na atom) aby utworzyć wiązanie kowalentne.
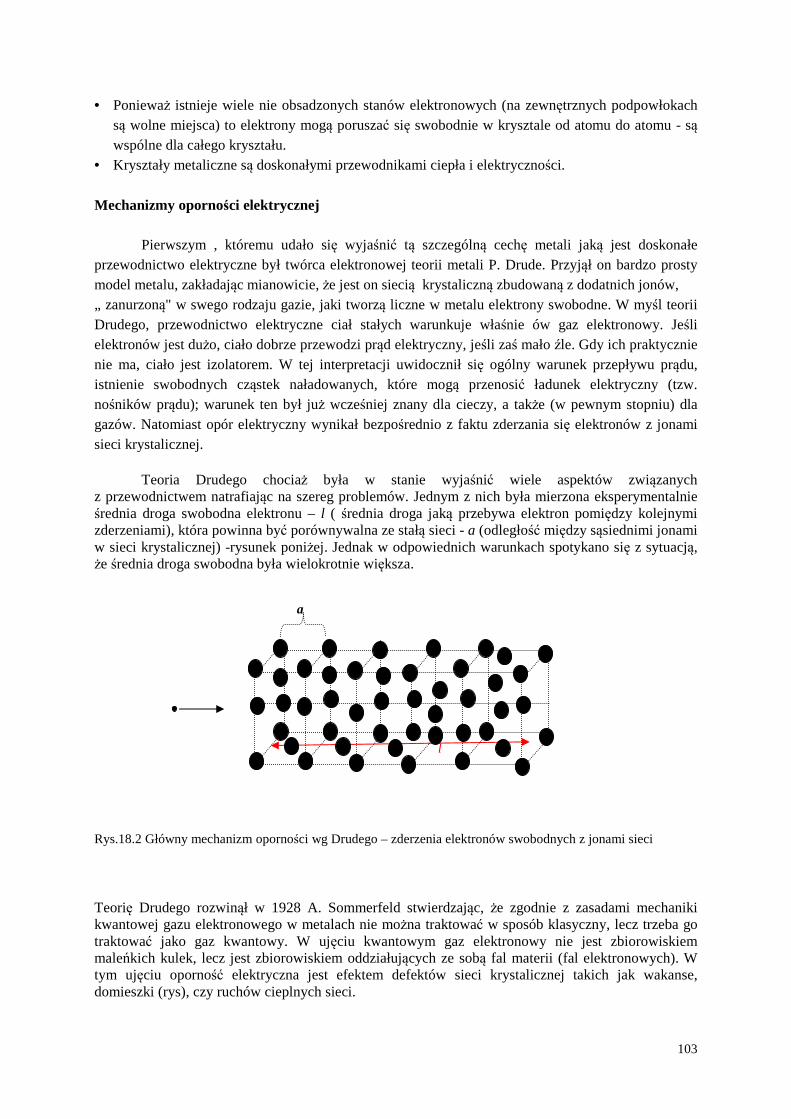
103
• Ponieważ istnieje wiele nie obsadzonych stanów elektronowych (na zewnętrznych podpowłokach są wolne miejsca) to elektrony mogą poruszać się swobodnie w krysztale od atomu do atomu - są wspólne dla całego kryształu.
• Kryształy metaliczne są doskonałymi przewodnikami ciepła i elektryczności. Mechanizmy oporności elektrycznej
Pierwszym , któremu udało się wyjaśnić tą szczególną cechę metali jaką jest doskonałe przewodnictwo elektryczne był twórca elektronowej teorii metali P. Drude. Przyjął on bardzo prosty model metalu, zakładając mianowicie, że jest on siecią krystaliczną zbudowaną z dodatnich jonów, „ zanurzoną" w swego rodzaju gazie, jaki tworzą liczne w metalu elektrony swobodne. W myśl teorii Drudego, przewodnictwo elektryczne ciał stałych warunkuje właśnie ów gaz elektronowy. Jeśli elektronów jest dużo, ciało dobrze przewodzi prąd elektryczny, jeśli zaś mało źle. Gdy ich praktycznie nie ma, ciało jest izolatorem. W tej interpretacji uwidocznił się ogólny warunek przepływu prądu, istnienie swobodnych cząstek naładowanych, które mogą przenosić ładunek elektryczny (tzw. nośników prądu); warunek ten był już wcześniej znany dla cieczy, a także (w pewnym stopniu) dla gazów. Natomiast opór elektryczny wynikał bezpośrednio z faktu zderzania się elektronów z jonami sieci krystalicznej.
Teoria Drudego chociaż była w stanie wyjaśnić wiele aspektów związanych z przewodnictwem natrafiając na szereg problemów. Jednym z nich była mierzona eksperymentalnie średnia droga swobodna elektronu – l ( średnia droga jaką przebywa elektron pomiędzy kolejnymi zderzeniami), która powinna być porównywalna ze stałą sieci - a (odległość między sąsiednimi jonami w sieci krystalicznej) -rysunek poniżej. Jednak w odpowiednich warunkach spotykano się z sytuacją, że średnia droga swobodna była wielokrotnie większa.
Rys.18.2 Główny mechanizm oporności wg Drudego – zderzenia elektronów swobodnych z jonami sieci
Teorię Drudego rozwinął w 1928 A. Sommerfeld stwierdzając, że zgodnie z zasadami mechaniki kwantowej gazu elektronowego w metalach nie można traktować w sposób klasyczny, lecz trzeba go traktować jako gaz kwantowy. W ujęciu kwantowym gaz elektronowy nie jest zbiorowiskiem maleńkich kulek, lecz jest zbiorowiskiem oddziałujących ze sobą fal materii (fal elektronowych). W tym ujęciu oporność elektryczna jest efektem defektów sieci krystalicznej takich jak wakanse, domieszki (rys), czy ruchów cieplnych sieci.
l
a
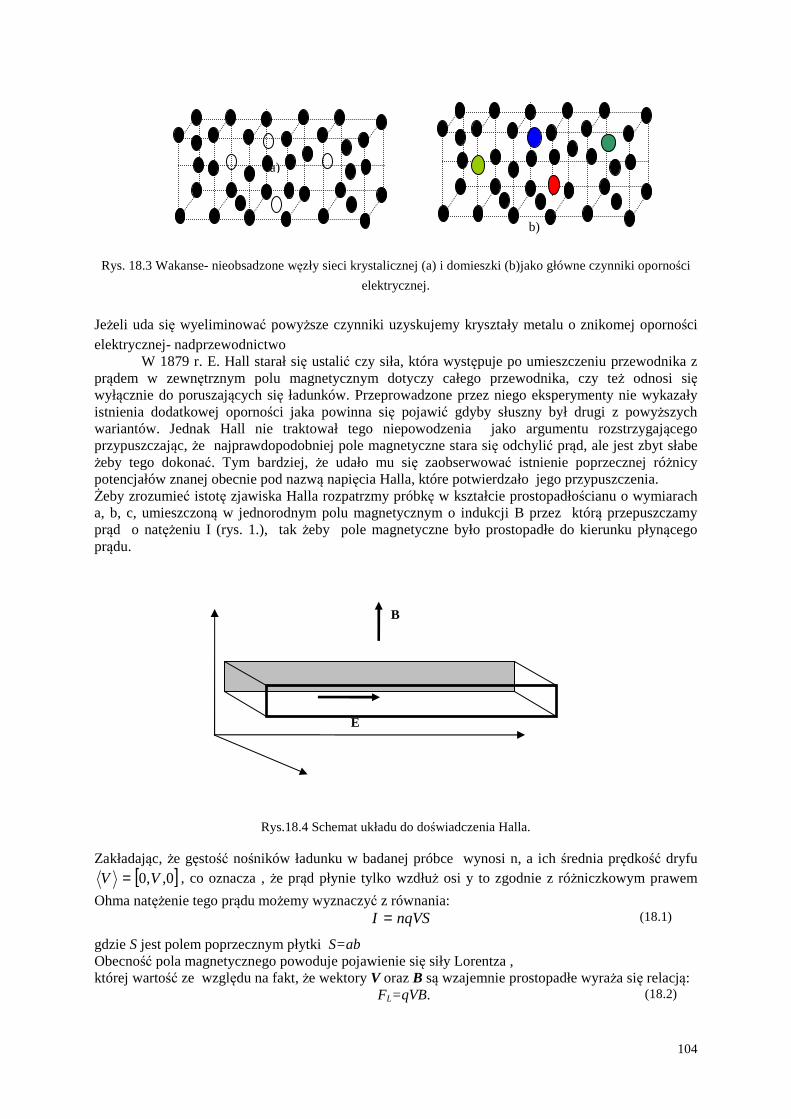
104
Rys. 18.3 Wakanse- nieobsadzone węzły sieci krystalicznej (a) i domieszki (b)jako główne czynniki oporności
elektrycznej.
Jeżeli uda się wyeliminować powyższe czynniki uzyskujemy kryształy metalu o znikomej oporności elektrycznej- nadprzewodnictwo
W 1879 r. E. Hall starał się ustalić czy siła, która występuje po umieszczeniu przewodnika z prądem w zewnętrznym polu magnetycznym dotyczy całego przewodnika, czy też odnosi się wyłącznie do poruszających się ładunków. Przeprowadzone przez niego eksperymenty nie wykazały istnienia dodatkowej oporności jaka powinna się pojawić gdyby słuszny był drugi z powyższych wariantów. Jednak Hall nie traktował tego niepowodzenia jako argumentu rozstrzygającego przypuszczając, że najprawdopodobniej pole magnetyczne stara się odchylić prąd, ale jest zbyt słabe żeby tego dokonać. Tym bardziej, że udało mu się zaobserwować istnienie poprzecznej różnicy potencjałów znanej obecnie pod nazwą napięcia Halla, które potwierdzało jego przypuszczenia. Żeby zrozumieć istotę zjawiska Halla rozpatrzmy próbkę w kształcie prostopadłościanu o wymiarach a, b, c, umieszczoną w jednorodnym polu magnetycznym o indukcji B przez którą przepuszczamy prąd o natężeniu I (rys. 1.), tak żeby pole magnetyczne było prostopadłe do kierunku płynącego prądu.
Rys.18.4 Schemat układu do doświadczenia Halla. Zakładając, że gęstość nośników ładunku w badanej próbce wynosi n, a ich średnia prędkość dryfu
[ ]0,,0VV = , co oznacza , że prąd płynie tylko wzdłuż osi y to zgodnie z różniczkowym prawem
Ohma natężenie tego prądu możemy wyznaczyć z równania: nqVSI = (18.1)
gdzie S jest polem poprzecznym płytki S=ab Obecność pola magnetycznego powoduje pojawienie się siły Lorentza , której wartość ze względu na fakt, że wektory V oraz B są wzajemnie prostopadłe wyraża się relacją:
FL=qVB.
(18.2)
a)
b)
B
E
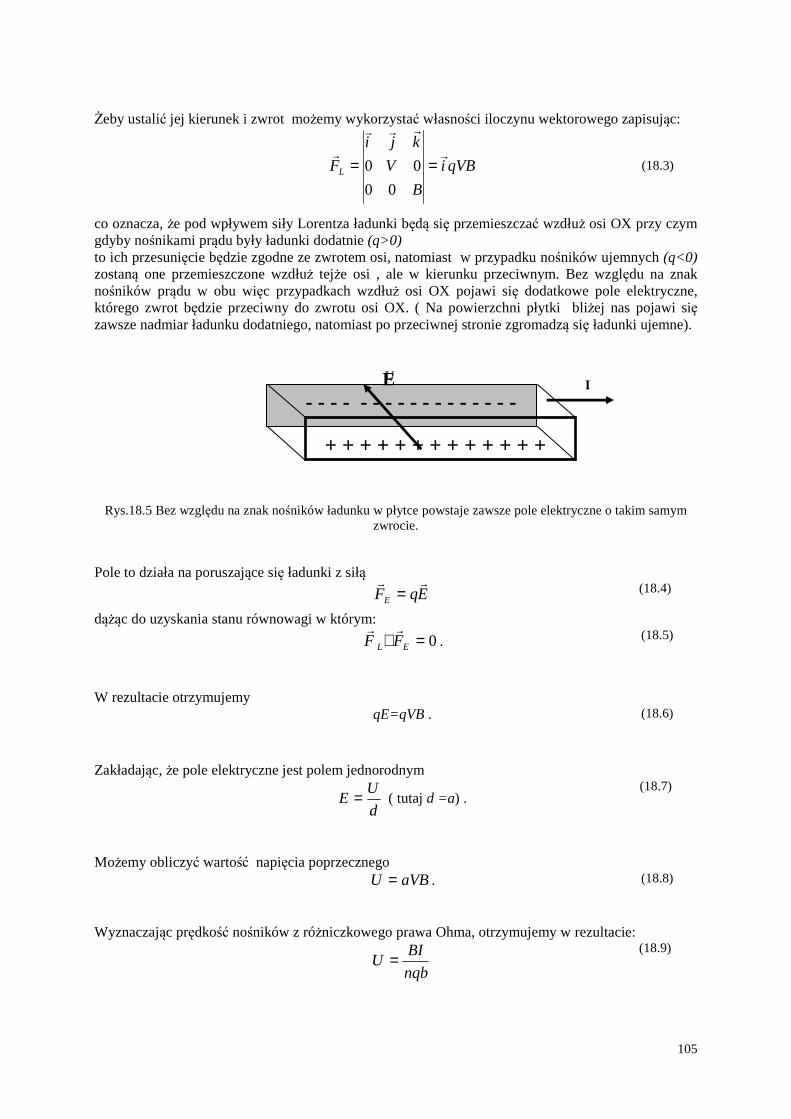
105
Żeby ustalić jej kierunek i zwrot możemy wykorzystać własności iloczynu wektorowego zapisując:
qVBi
B
V
kji
FL
r
rrr
r==
00
00
(18.3)
co oznacza, że pod wpływem siły Lorentza ładunki będą się przemieszczać wzdłuż osi OX przy czym gdyby nośnikami prądu były ładunki dodatnie (q>0) to ich przesunięcie będzie zgodne ze zwrotem osi, natomiast w przypadku nośników ujemnych (q<0) zostaną one przemieszczone wzdłuż tejże osi , ale w kierunku przeciwnym. Bez względu na znak nośników prądu w obu więc przypadkach wzdłuż osi OX pojawi się dodatkowe pole elektryczne, którego zwrot będzie przeciwny do zwrotu osi OX. ( Na powierzchni płytki bliżej nas pojawi się zawsze nadmiar ładunku dodatniego, natomiast po przeciwnej stronie zgromadzą się ładunki ujemne).
Rys.18.5 Bez względu na znak nośników ładunku w płytce powstaje zawsze pole elektryczne o takim samym zwrocie.
Pole to działa na poruszające się ładunki z siłą
EqFE
rr= (18.4)
dążąc do uzyskania stanu równowagi w którym: 0=+ EL FF
rr.
(18.5)
W rezultacie otrzymujemy
qE=qVB .
(18.6)
Zakładając, że pole elektryczne jest polem jednorodnym
d
UE = ( tutaj d =a) .
(18.7)
Możemy obliczyć wartość napięcia poprzecznego
aVBU = .
(18.8)
Wyznaczając prędkość nośników z różniczkowego prawa Ohma, otrzymujemy w rezultacie:
nqb
BIU =
(18.9)
+ + + + + + + + + + + + +
- - - - - - - - - - - - - - - - - E I U
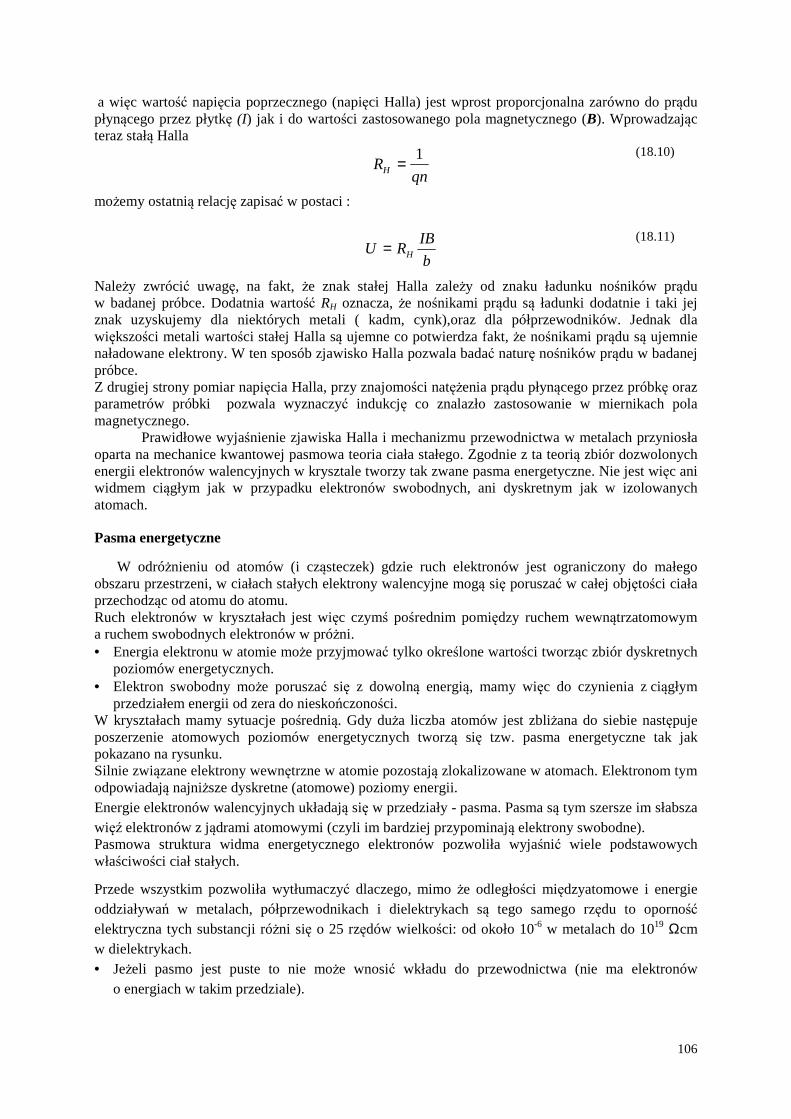
106
a więc wartość napięcia poprzecznego (napięci Halla) jest wprost proporcjonalna zarówno do prądu płynącego przez płytkę (I) jak i do wartości zastosowanego pola magnetycznego (B). Wprowadzając teraz stałą Halla
qnRH
1= (18.10)
możemy ostatnią relację zapisać w postaci :
b
IBRU H=
(18.11)
Należy zwrócić uwagę, na fakt, że znak stałej Halla zależy od znaku ładunku nośników prądu w badanej próbce. Dodatnia wartość RH oznacza, że nośnikami prądu są ładunki dodatnie i taki jej znak uzyskujemy dla niektórych metali ( kadm, cynk),oraz dla półprzewodników. Jednak dla większości metali wartości stałej Halla są ujemne co potwierdza fakt, że nośnikami prądu są ujemnie naładowane elektrony. W ten sposób zjawisko Halla pozwala badać naturę nośników prądu w badanej próbce. Z drugiej strony pomiar napięcia Halla, przy znajomości natężenia prądu płynącego przez próbkę oraz parametrów próbki pozwala wyznaczyć indukcję co znalazło zastosowanie w miernikach pola magnetycznego.
Prawidłowe wyjaśnienie zjawiska Halla i mechanizmu przewodnictwa w metalach przyniosła oparta na mechanice kwantowej pasmowa teoria ciała stałego. Zgodnie z ta teorią zbiór dozwolonych energii elektronów walencyjnych w krysztale tworzy tak zwane pasma energetyczne. Nie jest więc ani widmem ciągłym jak w przypadku elektronów swobodnych, ani dyskretnym jak w izolowanych atomach.
Pasma energetyczne
W odróżnieniu od atomów (i cząsteczek) gdzie ruch elektronów jest ograniczony do małego obszaru przestrzeni, w ciałach stałych elektrony walencyjne mogą się poruszać w całej objętości ciała przechodząc od atomu do atomu. Ruch elektronów w kryształach jest więc czymś pośrednim pomiędzy ruchem wewnątrzatomowym a ruchem swobodnych elektronów w próżni. • Energia elektronu w atomie może przyjmować tylko określone wartości tworząc zbiór dyskretnych
poziomów energetycznych. • Elektron swobodny może poruszać się z dowolną energią, mamy więc do czynienia z ciągłym
przedziałem energii od zera do nieskończoności. W kryształach mamy sytuacje pośrednią. Gdy duża liczba atomów jest zbliżana do siebie następuje poszerzenie atomowych poziomów energetycznych tworzą się tzw. pasma energetyczne tak jak pokazano na rysunku. Silnie związane elektrony wewnętrzne w atomie pozostają zlokalizowane w atomach. Elektronom tym odpowiadają najniższe dyskretne (atomowe) poziomy energii. Energie elektronów walencyjnych układają się w przedziały - pasma. Pasma są tym szersze im słabsza więź elektronów z jądrami atomowymi (czyli im bardziej przypominają elektrony swobodne). Pasmowa struktura widma energetycznego elektronów pozwoliła wyjaśnić wiele podstawowych właściwości ciał stałych.
Przede wszystkim pozwoliła wytłumaczyć dlaczego, mimo że odległości międzyatomowe i energie oddziaływań w metalach, półprzewodnikach i dielektrykach są tego samego rzędu to oporność elektryczna tych substancji różni się o 25 rzędów wielkości: od około 10-6 w metalach do 1019 Ωcm w dielektrykach. • Jeżeli pasmo jest puste to nie może wnosić wkładu do przewodnictwa (nie ma elektronów
o energiach w takim przedziale).
• Także pasmo całkowicie zapełnione nie bierze udziału w przewodnictwie. Jenapięcie (aby popłynął prąd) to w polu elektrycznym elektrony bwzrost ich energii. Ale ten proces jest niemo
• w paśmie. • Takich ruch elektronów jest mo
w którym są nie obsadzone stany energetyczne.Substancje o częściowo wypełnionych pasmach stylko całkowicie zapełnione lub puste stany energetyczne s(rysunek).
Rys.18.6 Na rysunku przedstawiono pasma energetyczne dla ciał w zalePasma dozwolone zaznaczone prostok(pasma obsadzone elektronami zostały zakropkowane). Dla trzecstałych w stanie podstawowym (temperatura zera bezwzglpasma dozwolone są całkowicie zapełnione przez elektrony rdzenia atomowego. Kolejne pasmo dozwolone to pasmo walencyjne, które w całkowicie zapełnione. Pasma walencyjne oddzielone spustych) przerwą energetyczną, która jest znacznie wipasmo walencyjne jest tylko częśPonieważ w obrębie pasma elektrony mogprzewodnikami. Jeżeli szerokość obszaru oddzielajprzerwa energetyczna lub pasmo wzbronione) jest duwszystkich temperaturach (aż do temperatury topnienia).Jeżeli jednak przerwa jest dostatecznie wczęść elektronów może zostać przeniesiona do pustego pasma. Kryształ, który w T = 0 K był izolatorem teraz będzie przewodził a jego przewodnoz temperaturą. Jeżeli przerwa jest mniejsza niw temperaturze pokojowej. Substancje z taką przerwą nazywamy półprzewodnikami.
dielektryk
e pasmo całkowicie zapełnione nie bierze udziału w przewodnictwie. Jeąd) to w polu elektrycznym elektrony będą przyspieszane, a to oznac
wzrost ich energii. Ale ten proces jest niemożliwy bo nie ma wolnych (nie obsadzonych) energii
Takich ruch elektronów jest możliwy dopiero w paśmie częściowo wypełnionym czyli takim, nie obsadzone stany energetyczne.
ciowo wypełnionych pasmach są więc metalami a substancje, w których wysttylko całkowicie zapełnione lub puste stany energetyczne są dielektrykami lub półprzewodnikami
18.6 Model pasmowy przewodnictwa ciał stałych.
Na rysunku przedstawiono pasma energetyczne dla ciał w zależności od ich własnoPasma dozwolone zaznaczone prostokątami są oddzielone od siebie przerwami energetycznymi (pasma obsadzone elektronami zostały zakropkowane). Dla trzech charakterystycznych grup ciał stałych w stanie podstawowym (temperatura zera bezwzględnego), najniższe w skali energetycznej
całkowicie zapełnione przez elektrony rdzenia atomowego. Kolejne pasmo dozwolone to pasmo walencyjne, które w przypadku dielektryków i półprzewodników jest równiecałkowicie zapełnione. Pasma walencyjne oddzielone są od pasm w przewodnictwa(całkowicie
ą, która jest znacznie większa dla dielektryków. Natomiast dla metali ne jest tylko częściowo zapełnione, będąc jednocześnie pasmem przewodnictwa.
bie pasma elektrony mogą przemieszczać się swobodnie, metale s
obszaru oddzielającego najwyższe pasmo walencyjne od pasma pprzerwa energetyczna lub pasmo wzbronione) jest duża to materiał ten jest dielektrykiem we
ż do temperatury topnienia). eli jednak przerwa jest dostatecznie wąska to w odpowiedniej temperaturze dzi
ć przeniesiona do pustego pasma. Kryształ, który w T = 0 K był dzie przewodził a jego przewodność szybko rośnie (opór spada) wraz
eli przerwa jest mniejsza niż 1 eV to przewodnictwo staje si
nazywamy półprzewodnikami.
półprzewodnik metal
107
e pasmo całkowicie zapełnione nie bierze udziału w przewodnictwie. Jeżeli przykładamy przyspieszane, a to oznacza
liwy bo nie ma wolnych (nie obsadzonych) energii
ciowo wypełnionym czyli takim,
c metalami a substancje, w których występują dielektrykami lub półprzewodnikami
ci od ich własności elektrycznych. oddzielone od siebie przerwami energetycznymi
h charakterystycznych grup ciał sze w skali energetycznej
całkowicie zapełnione przez elektrony rdzenia atomowego. Kolejne pasmo przypadku dielektryków i półprzewodników jest również
od pasm w przewodnictwa(całkowicie ksza dla dielektryków. Natomiast dla metali
nie pasmem przewodnictwa. swobodnie, metale są dobrymi
sze pasmo walencyjne od pasma przewodnictwa (tzw. a to materiał ten jest dielektrykiem we
ska to w odpowiedniej temperaturze dzięki energii cieplnej przeniesiona do pustego pasma. Kryształ, który w T = 0 K był
nie (opór spada) wraz o staje się wyraźne już
108
19.Elementy fizyki jądrowej Odkrycie jąder atomowych i pierwsze oszacowanie ich rozmiarów zawdzięczamy Ruthefordowi, który badał rozpraszanie cząstek . na cienkich foliach aluminiowych. Wynikało z nich bezpośrednio, że rozmiary jądra atomowego są rzędu 10-15m i że wszystkie jądra posiadają ładunek dodatni będący wielokrotnością ładunku jądra atomu wodoru – protonu. Jądra jednak nie mogły składać się z samych tylko protonów, ponieważ stosunek ładunku do masy dla wszystkich cięższych jąder atomowych jest mniejszy od 1. Procesy promieniotwórcze, czyli spontaniczne przekształcenia jąder atomowych pokazały, że jądra atomowe mają także wewnętrzną strukturę. Po odkryciu neutronu przez Chadwicka przyjęto model jądra zaproponowany przez Heisenberga według którego neutron składa się z protonów i neutronów, rozpatrywanych jako dwa odmienne stany nukleonu. Pomimo, że rozmiary jądra atomowego są o pięć rzędów mniejsze od rozmiaru atomu to w nim skoncentrowana jest prawie cała masa atomu (99,9%). Liczbę protonów w jądrze atomowym oznaczamy przez Z, natomiast N oznacza liczbę neutronów. W przybliżeniu można przyjąć, że proton i neutron mają takie same względne masy atomowe, tzw. ciężar atomowy równy 1. W efekcie liczba nukleonów w jądrze A=Z+N odpowiada względnej masie atomowej. Ładunek elektryczny protonu jest co do wartości dokładnie równy ładunkowi elektronu –ładunek elementarny r = 1,6 ∙ 10t, a ponieważ atomy są elektrycznie obojętne liczba porządkowa Z oznacza albo liczbę protonów w jądrze, lub elektronów na powłokach. W układzie okresowym dowolny pierwiastek X zapisujemy w postaci P , w lewym dolnym rogu liczba porządkowa, decydująca o pozycji pierwiastka w układzie okresowym (zawsze naturalna), w górnym liczba atomowa oznaczająca jak powyżej sumę nukleonów w jądrze. Zatem oznacza jądro atomu uranu składające się z 92 protonów w jądrze (także 92 elektrony na powłokach), oraz z 146 neutronów. Jednak jak łatwo zauważyć dla większości pierwiastków w układzie okresowym liczba atomowa A nie przyjmuje wartości całkowitych np. dla wodoru wynosi 1,008. Nie oznacza to jednak, ze w jądrze atomu wodoru znajduje się 1,008 nukleonu, ale jest efektem występowania w przyrodzie tak zwanych odmian izotopowych tego samego pierwiastka. W przypadku atomu wodoru oprócz typowego wodoru O - tylko jeden proton w jądrze, występuje deuter O - jeden proton i jeden neutron, oraz tryt O składający się z jednego protonu i dwóch neutronów. Mimo różnych nazw wszystkie trzy odmiany są atomami (jądrami) wodoru, które występują w przyrodzie w różnych proporcjach. Z tego względu liczba masowa (atomowa ) dla wodoru jako średnia ważona wszystkich trzech izotopów ma wartość ułamkową. Natomiast czysty izotop jak wspomniany powyżej ma liczbę atomową, która jest zawsze liczbą naturalną. Defekt masy i energia wiązania. Jądra atomowe są wyjątkowo trwałe, nie rozkładają się na części składowe ani pod wpływem wysokiej temperatury, ciśnienia czy napięcia. Oznacza to, że energia wiązania nukleonów musi być bardzo duża.
Zgodnie z równaniem Einsteina ,każdej masie m odpowiada energia:D = , gdzie , = 3 ∙10 / oznacza prędkość światła. Względne masy atomów jak również ich składników są wyrażane w fizycznej skali atomowej, gdzie standardem odniesienia jest masa izotopu węgla ¢ przyjęta za równą 12,00000. W pomiarach spektromasowych osiągnięto dokładność do siódmego miejsca po przecinku i tak masa protonu N = 1,007825, masa neutronu * = 1,008665. Zatem masa dowolnego jądra atomowego P zgodnie z tym co przyjęto wcześniej powinna być równa £ −¤N + 2q − ¤4*. Jednak co było niespodzianką masa jądra atomowego wyznaczona równie precyzyjnie jak masy nukleonów okazała się dla każdego jądra mniejsza od sumy mas jego składników. Analizując ten efekt na przykładzie jądra heluOr którego wyznaczona masa : £ = 4,002600, natomiast suma mas składników 2N + 2* = 4,032980. Stąd różnica mas zwana defektem masy;∆ = 0,030380. Wykorzystując teraz równanie Einsteina i pamiętając, że jednostka masy atomowej, czyli 1/12 masy izotopu węgla odpowiada 1,66 ∙ 10t+ otrzymujemy ∆ = 28,27r . Oznacza to, że podczas syntezy 4 nukleonów (dwóch protonów i dwóch neutronów) tworzących jądro helu wydziela się taka wartość energii. Z drugiej strony, takiej właśnie
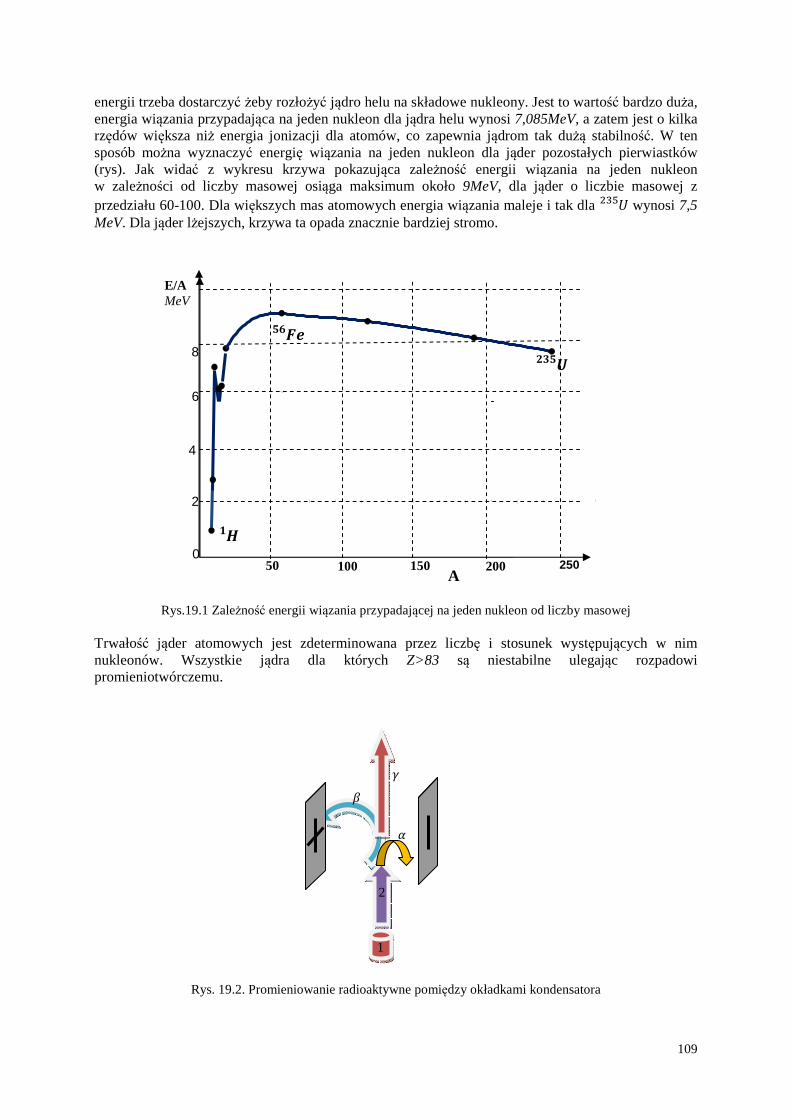
109
energii trzeba dostarczyć żeby rozłożyć jądro helu na składowe nukleony. Jest to wartość bardzo duża, energia wiązania przypadająca na jeden nukleon dla jądra helu wynosi 7,085MeV, a zatem jest o kilka rzędów większa niż energia jonizacji dla atomów, co zapewnia jądrom tak dużą stabilność. W ten sposób można wyznaczyć energię wiązania na jeden nukleon dla jąder pozostałych pierwiastków (rys). Jak widać z wykresu krzywa pokazująca zależność energii wiązania na jeden nukleon w zależności od liczby masowej osiąga maksimum około 9MeV, dla jąder o liczbie masowej z przedziału 60-100. Dla większych mas atomowych energia wiązania maleje i tak dla S wynosi 7,5 MeV. Dla jąder lżejszych, krzywa ta opada znacznie bardziej stromo.
Rys.19.1 Zależność energii wiązania przypadającej na jeden nukleon od liczby masowej
Trwałość jąder atomowych jest zdeterminowana przez liczbę i stosunek występujących w nim nukleonów. Wszystkie jądra dla których Z>83 są niestabilne ulegając rozpadowi promieniotwórczemu.
Rys. 19.2. Promieniowanie radioaktywne pomiędzy okładkami kondensatora
.
¦
§
1
2
50 100 150 200 250 0
2
4
6
8
E/A MeV
A
¨©ª«
¬«®
¯i

110
Próbka pierwiastka promieniotwórczego(1) emituje wiązkę (2), która przechodzi przez pole elektryczne płaskiego kondensatora. Obserwujemy, że w polu wiązka rozdziela się na trzy części; pierwsza odchyla się w stronę okładki naładowanej ujemnie- promieniowanie . , druga znacznie słabiej w stronę okładki dodatniej- promieniowanie ¦ , trzecia nie reaguje z polem elektrycznym- promieniowanie §. Szybko sprawdzono, że promieniowanie . to strumień jąder helu, promieniowanie ¦ okazało się strumieniem elektronów, natomiast promieniowanie § to promieniowanie elektromagnetyczne o bardzo dużej częstotliwości, a zatem o wielkiej energii kwantów. Rozpad promieniotwórczy ma charakter przypadkowy, jądra ulegają rozpadowi niezależnie od siebie z określonym prawdopodobieństwem, zdeterminowanym przez średni czas życia nuklidu. Rozpad typu ° - jądra pierwiastków o liczbie porządkowej większej od bizmutu w procesie przekształcania się w lżejsze, trwałe jądra emitują jądra helu zwane cząstkami .. W procesie tym liczba porządkowa maleje o dwie jednostki, a liczba masowa o cztery.
P → . + ±tPt
(19.1)
Rozpad ² – jądra, które zawierają zbyt dużo neutronów, emitują promieniowanie¦t , będące strumieniem elektronów powstałych podczas przeważających statystycznie przemian neutronów w protony.
6 → + rt + ³
(19.2)
Dodatkowy składnik po prawej stronie równania to antyneutrino elektronowe, cząstka elektrycznie obojętna i prawie zerowej masie spoczynkowej, która unosi brakujący pęd. W efekcie takiej przemiany jądro wyjściowe przekształca się w jądro pierwiastka o tej samej liczbie masowej natomiast liczbie porządkowej zwiększonej o jeden.
P → ¦t + ±wP
(19.3)
Rozpad ¦w- dotyczy jąder, które posiadają nadmiar protonów w jądrze i w efekcie przeważają w nim przemiany protonów w neutrony.
→ 6 + r +
(19.4)
W rezultacie takiej przemiany emitowany jest pozytron – cząstka elementarna o masie równej elektronowi, ale przeciwnym ładunku. Ponieważ rozpad promieniotwórczy ma charakter statystyczny – nie jesteśmy w stanie określić, które jądra ulegną rozpadowi, a jedynie podać ile ulegnie rozpadowi w danym czasie, do jego opisu analitycznego używamy prostych metod statystycznych. Zakładamy, że ilość jąder Δ0 , które ulegną rozpadowi w czasie Δ jest proporcjonalna do tego czasu, oraz do liczby jąder promieniotwórczych – N. Ilość rozpadów musi także zależeć od rodzaju jąder, które podlegają rozpadowi, co uwzględniamy wprowadzając współczynnik proporcjonalności tak zwaną stałą rozpadu charakterystyczną dla każdego pierwiastka promieniotwórczego. Zatem:
Δ0 = −´0Δ
(19.5)
Znak minus po prawej stronie równania oznacza, że wskutek rozpadu występuje tu ujemny przyrost jąder. Relacja powyższa pozwala zdefiniować stałą rozpadu
´ = − Δ00Δ
(19.6)

111
jako względną liczbę jąder, które ulegają rozpadowi w jednostce czas u. Przechodząc do przyrostów nieskończenie małych relację () zapisujemy w postaci:
d0 = −´0d
(19.7)
Jest to równanie różniczkowe, które możemy rozwiązać przez separację zmiennych
B00 = −´0B, (19.8)
a następnie bezpośrednio scałkować:
A B00 = − A ´B
11v
(19.9)
Otrzymując w rezultacie podstawowe równanie rozpadu promieniotwórczego: 0 = 0rt¶
(19.10)
Zwróćmy uwagę na dobór warunków brzegowych (granic całkowania); w chwili początkowej t=0, w próbce jest N0 jąder promieniotwórczych, po czasie t zostaje ich N, a zatem rozpadowi uległo:
Δ0 = 0 − 0.
(19.11)
Stałą rozpadu promieniotwórczego możemy wyrazić poprzez tak zwany czas połowicznego zaniku T, zdefiniowanego jako czas po którym ulegnie rozpadowi połowa jąder macierzystych. Okresy połowicznego rozpadu wszystkich pierwiastków promieniotwórczych zawierają się w bardzo szerokim zakresie od 10-8s do 1018 lat. Korzystając z definicji T, możemy zapisać ostatnią relację w postaci:
12 0 = 0rt¶·
(19.12)
Co po prostych przekształceniach, w których wykorzystujemy podstawowe własności logarytmów prowadzi do zależności:
´ = `62( (19.13)
Reakcje jądrowe. Przez reakcje jądrowe rozumiemy przemianę jąder pod wpływem bombardowania ich cząstkami takimi jak protony, neutrony, lekkie jądra izotopów wodoru, lub helu, a także wysokoenergetyczne kwanty promieniowania. Rzadziej stosuje się w tym celu jądra cięższych pierwiastków ze względu na olbrzymie energie jakie trzeba im nadawać, żeby pokonać oddziaływania elektryczne, które rosną wraz ze zwiększaniem ładunku jądra. Produktami reakcji jądrowych są inne jądra oraz wymienione powyżej cząstki. Ogólnie reakcje jądrowe zapisujemy w postaci:
q + → +b
(19.14)
lub w prostszej formie: A(a,b)B, gdzie a jest zawsze cząstką wywołującą reakcję, A-jądro początkowe, b- cząstka powstała w wyniku reakcji jądrowej, B- jądro końcowe. Pierwsza w historii reakcja jądrowa przeprowadzona w 1919 roku przez Rutheforda polegała na bombardowaniu jąder azotu cząstkami .,
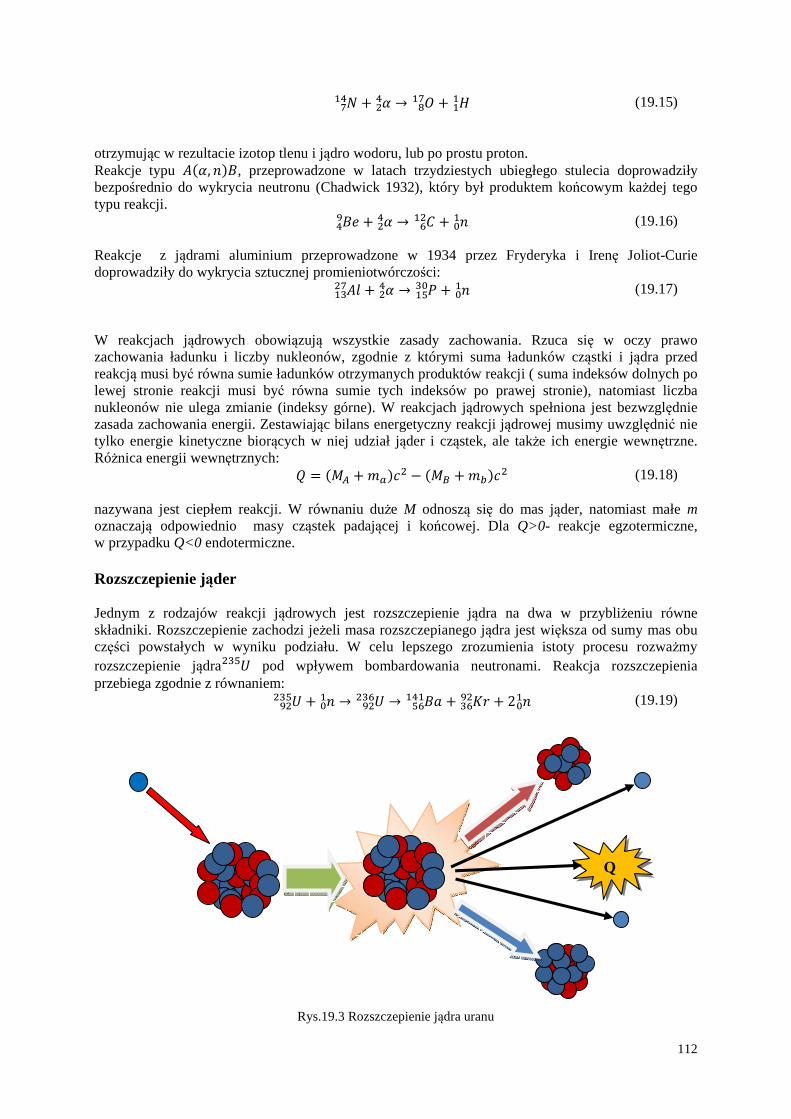
112
0 + .X → ¸ + O X
(19.15)
otrzymując w rezultacie izotop tlenu i jądro wodoru, lub po prostu proton. Reakcje typu q2., 64, przeprowadzone w latach trzydziestych ubiegłego stulecia doprowadziły bezpośrednio do wykrycia neutronu (Chadwick 1932), który był produktem końcowym każdej tego typu reakcji.
r + . → ¢ + 6
(19.16)
Reakcje z jądrami aluminium przeprowadzone w 1934 przez Fryderyka i Irenę Joliot-Curie doprowadziły do wykrycia sztucznej promieniotwórczości:
q` X + . → ¹S + 6
(19.17)
W reakcjach jądrowych obowiązują wszystkie zasady zachowania. Rzuca się w oczy prawo zachowania ładunku i liczby nukleonów, zgodnie z którymi suma ładunków cząstki i jądra przed reakcją musi być równa sumie ładunków otrzymanych produktów reakcji ( suma indeksów dolnych po lewej stronie reakcji musi być równa sumie tych indeksów po prawej stronie), natomiast liczba nukleonów nie ulega zmianie (indeksy górne). W reakcjach jądrowych spełniona jest bezwzględnie zasada zachowania energii. Zestawiając bilans energetyczny reakcji jądrowej musimy uwzględnić nie tylko energie kinetyczne biorących w niej udział jąder i cząstek, ale także ich energie wewnętrzne. Różnica energii wewnętrznych:
3 = 2P + 4, − 2" + º4,
(19.18)
nazywana jest ciepłem reakcji. W równaniu duże M odnoszą się do mas jąder, natomiast małe m oznaczają odpowiednio masy cząstek padającej i końcowej. Dla Q>0- reakcje egzotermiczne, w przypadku Q<0 endotermiczne. Rozszczepienie jąder Jednym z rodzajów reakcji jądrowych jest rozszczepienie jądra na dwa w przybliżeniu równe składniki. Rozszczepienie zachodzi jeżeli masa rozszczepianego jądra jest większa od sumy mas obu części powstałych w wyniku podziału. W celu lepszego zrozumienia istoty procesu rozważmy rozszczepienie jądra S pod wpływem bombardowania neutronami. Reakcja rozszczepienia przebiega zgodnie z równaniem:
+ 6 S → ¢ → + » + 2 6 ¢S¢
(19.19)
Rys.19.3 Rozszczepienie jądra uranu
Q

113
Po wychwyceniu neutronu jądro uranu S przekształca się w niestabilne jądro ¢ , które samorzutnie rozpada się na dwa znacznie mniejsze fragmenty; jądra baru i kryptonu. Dodatkowo powstają dwa neutrony i wydziela się znaczna ilość energii Q. Powstawanie dodatkowej energii wynika z faktu, że energia wiązania dla jądra uranu jest mniejsza (rys.19.1)niż energia wiązania nowych mniejszych jąder. Powstałe podczas rozszczepienia neutrony mogą być wykorzystane do kolejnych rozszczepień.
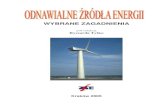












![Skrypt [2008]](https://static.fdocuments.pl/doc/165x107/5571fda24979599169998e67/skrypt-2008.jpg)


