Serwisy - SEW EurodriveKarta synchronicznego działania DRS11B Wydanie 10/2007 Podręcznik 11671947...
52
Motoreduktory \ Przekładnie przemysłowe \ Elektronika napędowa \ Automatyka napędowa \ Serwisy MOVIDRIVE ® MDX61B Karta synchronicznego dzialania DRS11B P odręcznik Wydanie 10/2007 11671947 / PL
Transcript of Serwisy - SEW EurodriveKarta synchronicznego działania DRS11B Wydanie 10/2007 Podręcznik 11671947...
Motoreduktory \ Przekładnie przemysłowe \ Elektronika napędowa \ Automatyka napędowa \ Serwisy
MOVIDRIVE® MDX61B
Karta synchronicznego działania DRS11B
PodręcznikWydanie 10/2007
11671947 / PL
SEW-EURODRIVE – Driving the world
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 3
1 Wskazówki ogólne ................................................................................................. 4
1.1 Struktura wskazówek bezpieczeństwa........................................................... 41.2 Roszczenia z tytułu odpowiedzialności za wady............................................ 41.3 Wykluczenie odpowiedzialności..................................................................... 4
2 Wskazówki bezpieczeństwa ................................................................................. 5
2.1 Dokumentacja uzupełniająca ......................................................................... 52.2 Funkcje bezpieczeństwa................................................................................ 52.3 Zastosowania dźwignicowe............................................................................ 52.4 Nazwy produktu i znak towarowy................................................................... 52.5 Złomowanie.................................................................................................... 5
3 Wprowadzenie ........................................................................................................ 6
3.1 Opis systemu ................................................................................................. 6
4 Projektowanie ......................................................................................................... 8
4.1 Przykłady zastosowania................................................................................. 84.2 Wskazówki dotyczące projektowania........................................................... 104.3 Bieg synchroniczny z nadzorem przerw kabla połączeniowego enkodera ....... 114.4 Synchroniczny start / zatrzymanie ............................................................... 124.5 Bieg synchroniczny z enkoderem odcinkowym............................................ 13
5 Montaż i wskazówki instalacyjne........................................................................ 14
5.1 Montaż karty opcji DRS11B ......................................................................... 145.2 Przyłączenie i opis zacisków opcji DRS11B ................................................ 165.3 Wskazówki dotyczące instalacji ................................................................... 175.4 Przykład połączenia MDX61B-Master - MDX61B-Slave.............................. 205.5 Podłączenie Enkoder inkrementalny jako Master ........................................ 21
6 Uruchomienie ....................................................................................................... 22
6.1 Wprowadzenie ............................................................................................. 226.2 Krótki opis uruchomienia.............................................................................. 236.3 Prace wstępne ............................................................................................. 246.4 Aktywacja biegu synchronicznego ............................................................... 246.5 Test biegu synchronicznego z zamontowanymi napędami.......................... 256.6 Przykłady obliczania P221 i P222................................................................ 26
7 Parametr................................................................................................................ 29
7.1 Proporcja wartości parametrów i liczby obrotowej odbiornika napędu......... 297.2 Komunikaty .................................................................................................. 307.3 Opisy parametrów........................................................................................ 32
8 Komunikat o błędach i lista błędów ................................................................... 39
8.1 Opcja karta biegu synchronicznego DRS11B.............................................. 39
9 Dane techniczne ................................................................................................... 41
9.1 Opcja karta biegu synchronicznego DRS11B.............................................. 41
10 Skorowidz ............................................................................................................. 42
1
4 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Struktura wskazówek bezpieczeństwaWskazówki ogólne
4 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
1Struktura wskazówek bezpieczeństwaWskazówki ogólne
Podręcznik
1 Wskazówki ogólne
1.1 Struktura wskazówek bezpieczeństwa
Wskazówki bezpieczeństwa w niniejszym podręczniku posiadają następującą strukturę:
1.2 Roszczenia z tytułu odpowiedzialności za wady
Przestrzeganie niniejszej dokumentacji jest warunkiem bezawaryjnej pracy urządzeniai uznania ewentualnych roszczeń z tytułu gwarancji. Przeczytaj więc najpierwpodręcznik, zanim rozpoczniesz użytkować urządzenie!
Należy zapewnić dostępność oraz dobry i czytelny stan dokumentacji dla osóbodpowiedzialnych za instalację i pracę oraz osób, które na własną odpowiedzialnośćpracują przy urządzeniu.
1.3 Wykluczenie odpowiedzialności
Przestrzeganie informacji zawartych w dokumentacji MOVIDRIVE® jest podstawowymwarunkiem dla bezpiecznej eksploatacji i uzyskania podanych właściwości produktuoraz cech wydajności. Za osoby, straty rzeczowe lub majątkowe, powstałe z powodunieprzestrzegania instrukcji obsługi firma SEW-EURODRIVE nie ponosi żadnejodpowiedzialności. W takich przypadkach wykluczona jest odpowiedzialność za defektyujawnione.
Piktogram SŁOWO SYGNALIZACYJNE!Rodzaj zagrożenia i jego źródło.
Możliwe skutki zlekceważenia.
• Czynności zapobiegające zagrożeniu.
Piktogram Słowo sygnalizacyjne
Znaczenie Skutki nieprzestrzegania
Przykład:
Ogólne zagrożenie
Specyficzne zagrożenie,np. porażenie prądem
ZAGROŻENIE! Bezpośrednie zagrożenie Śmierć lub ciężkie uszkodzenia ciała
OSTRZEŻENIE! Możliwa, niebezpieczna sytuacja Śmierć lub ciężkie uszkodzenia ciała
UWAGA! Możliwa, niebezpieczna sytuacja Lekkie uszkodzenia ciała
STOP! Możliwe straty rzeczowe Uszkodzenie systemu napędowego lub jego otoczenia
WSKAZÓWKA Przydatna wskazówka lub rada.Ułatwia obsługę systemu napędowego.
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 5
2Dokumentacja uzupełniająca
Wskazówki bezpieczeństwa
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 5
2Dokumentacja uzupełniająca
Wskazówki bezpieczeństwa
2 Wskazówki bezpieczeństwa
2.1 Dokumentacja uzupełniająca
• Prace przy instalacji i uruchamianiu urządzenia mogą być wykonywane tylko przezwykwalifikowanych elektryków przy zachowaniu obowiązujących przepisóww zakresie zapobiegania wypadkom oraz stosowaniu się do instrukcji obsługi"MOVIDRIVE® MDX60B/61B"!
• Zanim rozpoczniesz instalację i przeprowadzisz uruchomienie karty opcji DRS11B,zapoznaj się dokładnie z niniejszą dokumentacją.
• Przestrzeganie tej dokumentacji jest warunkiem bezawaryjnej pracy urządzeniai uznania ewentualnych roszczeń z tytułu gwarancji.
2.2 Funkcje bezpieczeństwa
Falownik MOVIDRIVE® MDX61B nie może spełniać funkcji bezpieczeństwa beznadrzędnych systemów zabezpieczających. Aby zagwarantować ochronę osóbi maszyn, należy stosować nadrzędne systemy zabezpieczające.
W celu zapewnienia bezpiecznej eksploatacji należy przestrzegać danych zawartych wponiższych instrukcjach.
• Bezpieczne odłączanie dla MOVIDRIVE® B
2.3 Zastosowania dźwignicowe
Urządzenie MOVIDRIVE® MDX60B/61B nie może być wykorzystywane do funkcjidźwignicowych jako urządzenie bezpieczeństwa.
Jako urządzenia zabezpieczające stosuj systemy nadzorujące lub mechaniczneurządzenia ochronne, aby uniknąć ewentualnych obrażeń ciała i szkód materialnych.
2.4 Nazwy produktu i znak towarowy
Wymienione w niniejszym podręczniku marki i nazwy produktu są znakami towarowymilub zarejestrowanymi znakami towarowymi należącymi do ich posiadacza.
2.5 Złomowanie
Należy przestrzegać aktualnych przepisów krajowych!
Poszczególne elementy należy złomować oddzielnie, w zależności od ich właściwościi przepisów obowiązujących w danym kraju np. jako:
• złom elektroniczny
• tworzywa sztucznego
• blacha
• miedź
itd.
3
6 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Opis systemuWprowadzenie
6 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
3Opis systemuWprowadzenie
3 Wprowadzenie
3.1 Opis systemu
Dzięki opcji "Karta synchronicznego działania DRS11B" można napędzaćsynchronicznie-kątowo względem siebie lub w innym regulowanym układzie zespółsilników (elektroniczna przekładnia).
Jako "Master" oznaczony jest ten napęd, który określa ustawienia pozycyjne. Może tobyć również enkoder inkrementalny. Jako "Slave" oznaczony jest ten napęd, któregodotyczą ustawienia pozycyjne.
Silniki Master i Slave muszą być ponadto wyposażone w enkodery. Jako napęd Slavestosuje się MOVIDRIVE® MDX61B z opcją "Karta synchronicznego działania DRS11B".
"Kartę synchronicznego działania DRS11B" należy umieścić w gnieździe rozszerzeniai można ją używać wyłącznie wraz z opcją DEH11B albo DER11B.
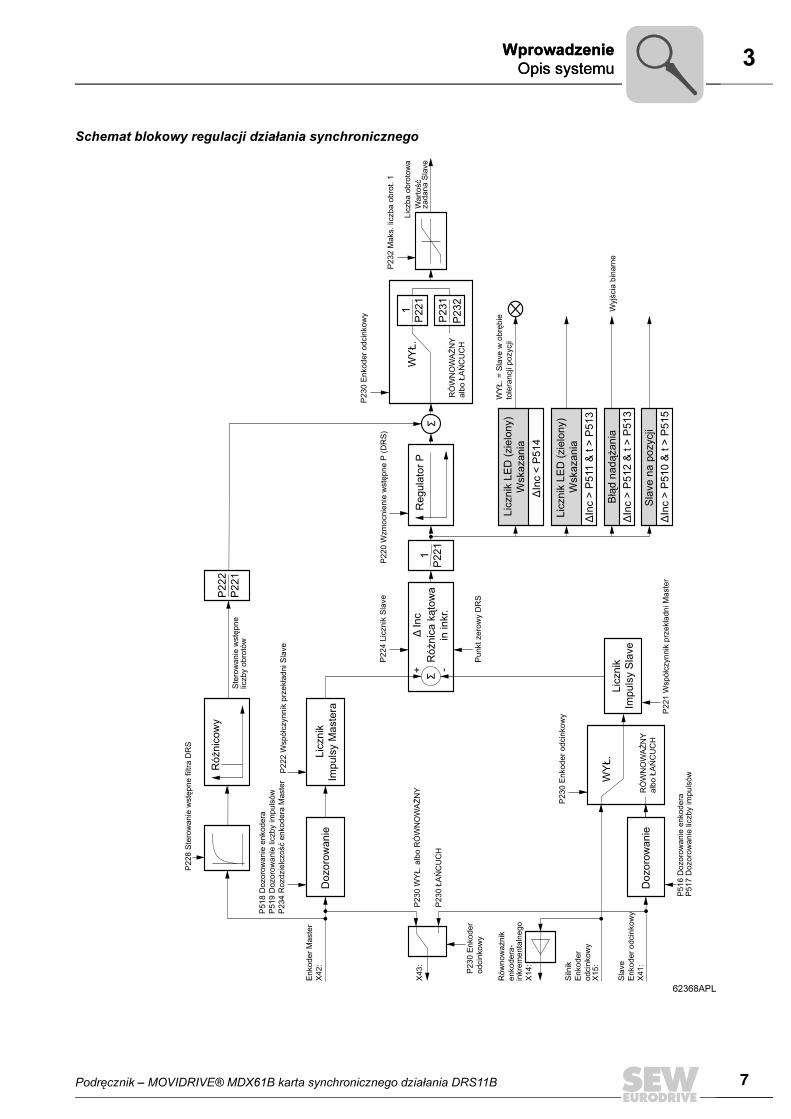
Liczone impulsy Master oraz Slave przeliczane są za pomocą parametrów P221/P222(współczynnik przekładni Master i Slave) na odbiornik napędu. Są one wzorcem dlaimpulsów liczonych na odcinek drogi.
System określa różnicę informacji odcinkowe Master i Slave oraz zapisuje tę wartość wformie sygnałów enkodera inkrementalnego w wewnętrznym liczniku różnicowym.Stosownie do tej różnicy tworzone będą informacje binarne, np. "DRS SLAVE IN POS","BŁĄD NADĄŻANIA" itd. Ten licznik w różnych trybach pracy (P223) jest różnieoceniany (→ Rozdz. 7.3).
Sterowanie oblicza wartość korekcji liczby obrotów dla napędu Slave, abyzminimalizować różnicę kątową pomiędzy Master i Slave. W tym celu mnożona jestaktualna różnica kątowa z parametrem P220 wzmocnienie P. Wynik stanowi różnicękorekcji liczby obrotów napędów Slave.
• Master i Slave pracują synchronicznie, wartość różnicowa = 0 → wartość korekcyjna= 0
• Slave spóźnia się, wartość różnicowa > 0 → wartość korekcyjna > 0, Slaveprzyśpiesza
• Slave wyprzedza, wartość różnicowa < 0 → wartość korekcyjna < 0, Slave zwalnia
Zachowanie regulatora pracy synchronicznej w czasie ruchu jest określane przezwysokość wzmocnienia P (P220).
• Jeżeli wartość wzmocnienia P jest za duża, to system zaczyna się kołysać.
• Jeżeli wartość wzmocnienia została ustawiona za nisko, to w stanie przejściowym(przyspieszenie lub opóźnienie)może nie zostać zredukowana różnica kątowa.
STOP!Dla synchronicznego działania napędów Master i Slave jest istotne, aby przetwornicaSlave była wyposażona w opornik hamowania. Dla przetwornicy Master jestwymagany, zależnie od zastosowania przy pracy generatora, także opornikhamowania.
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 7
3Opis systemu
Wprowadzenie
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 7
3Opis systemu
Wprowadzenie
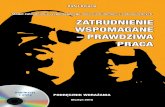
Schemat blokowy regulacji działania synchronicznego
62368APL
Enk
oder
Mas
ter
X42
:
P23
0 E
nkod
er
odci
nkow
y
P23
0 W
YŁ.
alb
o R
ÓW
NO
WA
ŻNY
P23
0 E
nkod
er o
dcin
kow
y
P51
6 D
ozor
owan
ie e
nkod
era
P51
7 D
ozor
owan
ie li
czby
impu
lsów
P23
0 ŁA
ŃC
UC
H
P518
Doz
orow
anie
enk
oder
aP5
19 D
ozor
owan
ie li
czby
impu
lsów
P234
Roz
dzie
lczo
ść e
nkod
era
Mas
ter
P22
2 W
spół
czyn
nik
prze
kład
ni S
lave
P22
8 S
tero
wan
ie w
stęp
ne fi
ltra
DR
S
P22
4 Li
czni
k S
lave
P22
0 W
zmoc
nien
ie w
stęp
ne P
(DR
S)
P23
0 E
nkod
er o
dcin
kow
y
P23
2 M
aks.
licz
ba o
brot
. 1
Licz
ba o
brot
owa
War
tość
za
dana
Sla
ve
RÓ
WN
OW
AŻN
Yal
bo Ł
AŃ
CU
CH
RÓ
WN
OW
AŻN
Yal
bo Ł
AŃ
CU
CH
Wyj
ścia
bin
arne
WY
Ł. =
Sla
ve w
obr
ębie
tole
ranc
ji po
zycj
i
WY
Ł.
WY
Ł.
Pun
kt z
erow
y D
RS
P22
1 W
spół
czyn
nik
prze
kład
ni M
aste
r
Ste
row
anie
wst
ępne
lic
zby
obro
tów
Róż
nico
wy
Licz
nik
Impu
lsy
Mas
tera
Licz
nik
Impu
lsy
Sla
ve
Reg
ulat
or P
Licz
nik
LED
(zie
lony
)W
skaz
ania
Licz
nik
LED
(zie
lony
)W
skaz
ania
Błą
d na
dąża
nia
Sla
ve n
a po
zycj
i
+ -
Doz
orow
anie
Doz
orow
anie
P22
2P
221
X43
:
Rów
now
ażni
k en
kode
ra-
inkr
emen
taln
ego
X14
:
Sla
veE
nkod
er o
dcin
kow
yX
41:
Siln
ikE
nkod
er
odci
nkow
yX
15:
1P
221
1P
221
P23
2P
231
Róż
nica
kąt
owa
in in
kr.
4
8 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Przykłady zastosowaniaProjektowanie
8 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
4Przykłady zastosowaniaProjektowanie
4 Projektowanie
4.1 Przykłady zastosowania
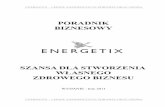
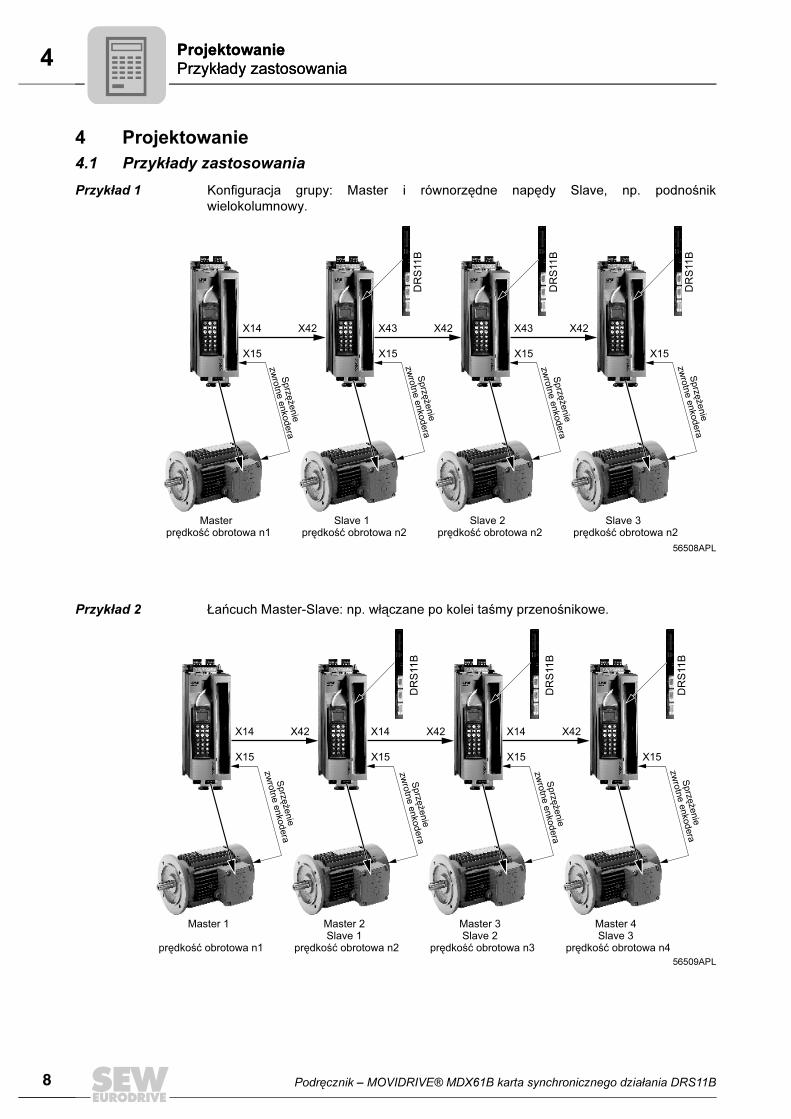
Przykład 1 Konfiguracja grupy: Master i równorzędne napędy Slave, np. podnośnikwielokolumnowy.
Przykład 2 Łańcuch Master-Slave: np. włączane po kolei taśmy przenośnikowe.
56508APL
X15
X14 X42
Sprzężenie
zwrotne enkodera
Masterprędkość obrotowa n1
X15
X43 X42
Slave 1prędkość obrotowa n2
DR
S11
B
DR
S11
B
DR
S11
B
X15
X43 X42
Slave 2prędkość obrotowa n2
X15
Slave 3prędkość obrotowa n2
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
56509APL
X15
X14 X42
Master 1
prędkość obrotowa n1
X15
X14 X42
Master 2Slave 1
prędkość obrotowa n2
DR
S11
B
DR
S11
B
DR
S11
B
X15
X14 X42
Master 3Slave 2
prędkość obrotowa n3
X15
Master 4Slave 3
prędkość obrotowa n4
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 9
4Przykłady zastosowania
Projektowanie
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 9
4Przykłady zastosowania
Projektowanie
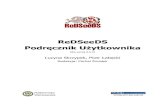
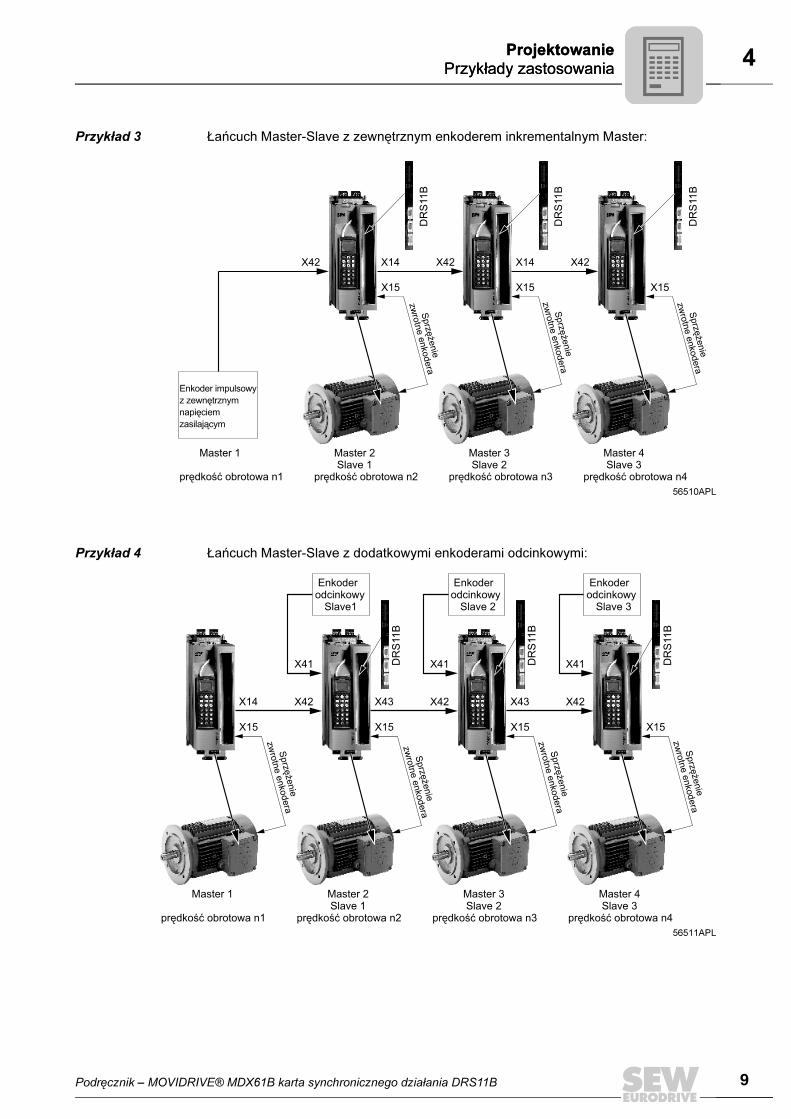
Przykład 3 Łańcuch Master-Slave z zewnętrznym enkoderem inkrementalnym Master:
Przykład 4 Łańcuch Master-Slave z dodatkowymi enkoderami odcinkowymi:
56510APL
X42
Master 1
prędkość obrotowa n1
X15
X14 X42
Master 2Slave 1
prędkość obrotowa n2
DR
S11
B
DR
S11
B
DR
S11
B
X15
X14 X42
Master 3Slave 2
prędkość obrotowa n3
X15
Master 4Slave 3
prędkość obrotowa n4
Enkoder impulsowyz zewnętrznym napięciem zasilającym
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
56511APL
X15
X14 X42
Master 1
prędkość obrotowa n1
X41
X15
X43 X42
Master 2Slave 1
prędkość obrotowa n2
DR
S11
B
X15
X43 X42
Master 3Slave 2
prędkość obrotowa n3
X15
Master 4Slave 3
prędkość obrotowa n4
Enkoder odcinkowy
Slave1
X41 DR
S11
B
Enkoder odcinkowy
Slave 2
X41 DR
S11
B
Enkoder odcinkowy
Slave 3
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
Sprzężenie
zwrotne enkodera
4
10 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Wskazówki dotyczące projektowaniaProjektowanie
10 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
4Wskazówki dotyczące projektowaniaProjektowanie
4.2 Wskazówki dotyczące projektowania
Przestrzegaj poniższych wskazówek dot. projektowania:
• Wewnętrzny bieg synchroniczny nie powinien być stosowany wraz z systemamipołączonymi mechanicznie na sztywno.
• Falownik Slave należy wyposażyć w rezystor hamujący.
• Nowy offset mogą Państwo wówczas aktywować, gdy wcześniejsze przesunięciekątowe zostanie nadrobione.
• Podczas projektowania zastosowań biegu synchronicznego należy zwrócić uwagę,aby Slave był w stanie w każdej chwili zniwelować różnicę kątową względemMastera. Ustawić maksymalną prędkość obrotową (P302) dla Slave wyższą odmaksymalnej prędkości obrotowej napędu Master.
Jeżeli przy trójfazowych silnikach asynchronicznych wartość maksymalnej liczbyobrotowej zostanie ustawiona większa od nominalnej prędkości obrotowej silnika, tow zakresie osłabiania pola nie będzie mógł być w pełni wykorzystany momentobrotowy silnika. Przy specjalnych kombinacjach Master-Slave może to prowadzićdo błędów nadążania (F42).
Dodatkowo przy przejściu z biegu wolnego do biegu synchronicznego może toskutkować synchronizacją z możliwie maksymalnym przyspieszeniem albo poprzezustawianą rampę (P24_ Bieg synchroniczny z nadrabianiem).
• Biegu synchronicznego należy używać zawsze z włączonym nadzorem przerwaniaprzewodów (→ Rozdz. 4.3).
• Korzystając z biegu synchronicznego należy stosować możliwie jednakowe rodzajenapędów.
• W przypadku napędów wielokolumnowych zawsze należy stosować jednakowesilniki z jednakowymi przekładniami (identyczne przełożenia).
• W konfiguracji grupowej (1 Master i x równorzędnych napędów Slave) możnaprzyłączyć maks. 5 wejść binarnych przetwornic Slave do jednego wyjścia binarnegoMastera.
• Jeżeli Master przy włączonym zasilaniu stoi a Slave jest odłączony i ponownieprzyłączony do sieci, to Slave znajduje się w pozycji roboczej "BRAK ZGODY".
• Jeżeli Master przy włączonym zasilaniu działa a Slave został odłączony od sieci, toMaster przechodzi do stanu "ZACISK ZEWNĘTRZNY" (F26). Jeżeli Slave ponowniezostanie podłączony do sieci, to Slave w zależności od ustawionej granicy błędunadążania (P512) może rozpoznać nieprawidłowość "BŁĄD NADĄŻANIA" (F42).
• Przy podłączaniu enkodera silnika należy uwzględnić opcję DEH11B / DER11B:X15instrukcji obsługi MOVIDRIVE® MDX60B/61B.
• W czasie eksploatacji z opcją DEH11B / DER11B należy zapamiętać, że:
– DEH11B: liczba impulsów (X14) jest identyczna z wejściem X15 enkodera silnika– DER11B: liczba impulsów zawsze wynosi 1024 impulsów na obrót
• Do wejść X41 i X42 można przyłączyć następujące enkodery:
– DC-5-V-TTL, enkoder z charakterystyką sygnału RS422, enkoder sin/cos
• Maksymalna dopuszczalna częstotliwość wejściowa dla wejść enkodera wynosi200 kHz
• Przy zastosowaniu enkoderów odcinkowych proporcja rozdzielczości układupomiaru drogi enkodera silnika i enkodera odcinkowego powinna znaleźć sięw przedziale 0,1 ... 10.
• Enkoder odcinkowy należy zamontować kształtowo (= bez poślizgu) na ruchomejczęści maszyny.
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 11
4Bieg synchroniczny z nadzorem przerw kabla połączeniowego enkodera
Projektowanie
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 11
4Bieg synchroniczny z nadzorem przerw kabla połączeniowego enkodera
Projektowanie
• Jeżeli Master jest zewnętrznym enkoderem inkrementalnym, należy zastosowaćenkoder inkrementalny o możliwie wysokiej rozdzielczości. Nie można jednakżeprzekroczyć maksymalnej częstotliwości wejściowej 200 kHz.
• Parametr P350 Zmiana kierunku obrotu 1:
Przy aktywnej regulacji biegu synchronicznego trzeba ustawić P350 = NIE. JeżeliMaster i Slave muszą pracować przy przeciwnych obrotach, to należy paramizamienić podłączenie ścieżek A/A i B/B na wejściu Slave (DRS11B:X42).
• W następujących wypadkach wymagane jest obowiązkowo złącze DC-24-V doDRS11B:X44:
– Zasilanie enkoderów odbywa się poprzez opcję DRS11B– Wyjścia binarne (X40:9, X40:10) DRS11B są wykorzystywane.– X40:8 używane jest jako wyjście napięciowe
• Dozorowanie enkoderów na X41/X42 jest możliwe jedynie przy zastosowaniuenkoderów TTL.
4.3 Bieg synchroniczny z nadzorem przerw kabla połączeniowego enkodera
Dla bezawaryjnego biegu synchronicznego pomiędzy Masterem i Slave niezbędne jestdozorowanie przerwania przewodów połączenia Master DEH11B/DER11B:X14(równoważnik enkodera inkrementalnego silnika) do Slave DRS11B:X42. Do tego służąnastępujące funkcje:
• "SILNIK ZATRZYMANY" i "DRS MASTER STOI"
• "/ZEW. BŁĄD" i "/ZAKŁÓCENIE"
Tylko w stanie bezruchu Master nie są przesyłane żadne impulsy enkodera do Slave.Z tego względu informacja o tym stanie przekazywana jest do Slave łączem binarnym.Jeżeli Master jednak nie zgłasza stanu bezruchu, a Slave nie liczy żadnych impulsówenkodera, to przyczyna leży w przerwanym przewodzie lub w awarii enkodera Master.Następnie Slave wyłącza się i zgłasza swój stan Masterowi przez dodatkowe łącze.
Niezbędne
połączenia
• Należy zaprogramować wyjście binarne Master na funkcję "SILNIK ZATRZYMANY".Następnie połączyć to wyjście z binarnym wejściem Slave, które jestzaprogramowane na funkcję "DRS MASTER STOI".
• Zaprogramować binarne wejście Master na funkcję "/ZEWN. BŁĄD". Następniepołączyć to wejście z binarnym wyjściem Slave, które jest zaprogramowane nafunkcję "/ZAKŁÓCENIE".
WSKAZÓWKADodatkowe dozorowanie enkodera można aktywować za pomocą P516 albo P519 (→ Rozdz. 6).
4
12 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Synchroniczny start / zatrzymanieProjektowanie
12 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
4Synchroniczny start / zatrzymanieProjektowanie
4.4 Synchroniczny start / zatrzymanie
Przy biegu synchronicznym MOVIDRIVE® dopuszczalny jest następujący mieszanytryb pracy:
• Master jest mniej lub tak samo dynamiczny jak Slave
• Master jest enkoderem inkrementalnym
• Funkcja hamowania WYŁ:
Nie ma blokady stopnia mocy (DI00 "/BLOKADA STOPNIA MOCY" = "1") i nie maZEZWOLENIA (DI03 = "0") → Slave pokazuje liczbę obrotów 0.
Nie ma blokady stopnia mocy (DI00 "/BLOKADA STOPNIA MOCY" = "1")i ZEZWOLENIA (DI03 = "1") → Slave synchronizuje się do pozycji Master.
• Funkcja hamowania WŁĄCZ:
Jeżeli Master i Slave synchronicznie pokazują liczbę obrotów 0, to w Slave włączasię hamulec.
W poniższej tabeli przytoczono ustawienia bądź połączenia kablowe w wyżejwymienionych kombinacjach Master/Slave w odniesieniu do synchronicznego startu /zatrzymania i uruchomionego nadzoru przerwania przewodów.
WSKAZÓWKAW obu obszarach zastosowań musi być możliwy synchroniczny start / zatrzymaniepomiędzy Masterem i Slave(-ami). Jest to warunkiem prawidłowej eksploatacji.Kombinacje, w których Master jest dynamiczniejszy od Slave, są z tego powoduniedopuszczalne.
Parametry Master Parametry Slave Uwaga
Nadzór przerwania przewodów:DO01 = "SILNIK ZATRZYMANY"Synchroniczny Start/Stop:DO02 = "STOPIEŃ WYJŚCIOWY
MOCY WŁ."
Nadzór przerwania przewodów:Zacisk DI = "DRS MASTER STOI"Synchroniczny Start/Stop:Zacisk DI= "DRS SLAVE START"
Slave stale odblokowany.Wyjścia binarne DO01 i DO02 nie są już dostępne u Mastera.
STOP!Przy włączonej funkcji hamowania w każdym wypadku zacisk Slave "DRS SLAVESTART" musi być zaprogramowany i także okablowany. Dotyczy to również sytuacji,gdy Master jest tylko enkoderem inkrementalnym, wówczas przez sterowaniezewnętrzne musi być zadany sygnał "DRS SLAVE START".
Przy wyłączonej funkcji hamowania w razie cofnięcia sygnału "DRS SLAVE START"albo przy wkroczeniu w obszar zatrzymania (P510) pozycja jest utrzymywanaw zależności od sytuacji.
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 13
4Bieg synchroniczny z enkoderem odcinkowym
Projektowanie
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 13
4Bieg synchroniczny z enkoderem odcinkowym
Projektowanie
4.5 Bieg synchroniczny z enkoderem odcinkowym
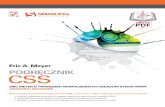
Przy wszystkich zastosowaniach, w których przenoszenie mocy pomiędzy wałem silnikai maszyną odbywa się w sposób zamknięty siłowo i można się spodziewać poślizgu,pomiar drogi musi odbywać się z zastosowaniem dodatkowego enkoderainkrementalnego. Ten enkoder inkrementalny montuje się kształtowo na ruchomejczęści maszyny i określa następnie jako enkoder odcinkowy. Enkoder odcinkowywykorzystywany jest do określania aktualnej pozycji Slave (G2). Dalej enkoder, któryzamontowany jest na wale silnika, służy do określania aktualnej liczby obrotów (G1)napędu.
Im większa jest rozdzielczość układu pomiaru drogi enkodera (liczba liczonychimpulsów na odcinek drogi), tym:
• dokładniej może Slave podążać za Masterem
• bardziej sztywno można ustawić regulację biegu synchronicznego (większywspółczynnik P)
• mniejszy jest błąd kątowy w czasie przyśpieszania bądź opóźniania
Ze względu na dokładność rachunkową regulatora biegu synchronicznego, proporcjarozdzielczości układu pomiaru drogi (Inkr./mm) silnika i enkodera odcinkowego powinnaznajdować się w zakresie 0,1 ... 10. Jeżeli ta proporcja znajdzie się poza obszarem tegozakresu, to w wielu wypadkach możliwe jest uzyskanie korzystniejszej proporcji dziękizastosowaniu innej przekładni napędowej enkodera odcinkowego.
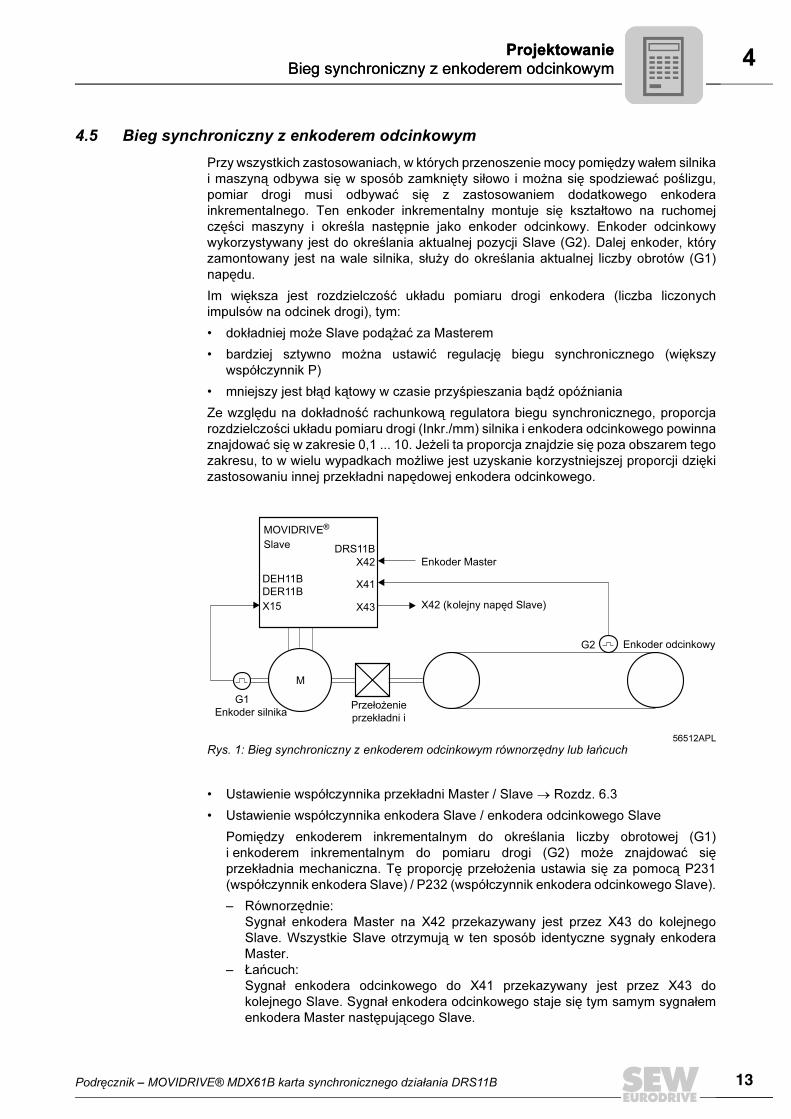
• Ustawienie współczynnika przekładni Master / Slave → Rozdz. 6.3
• Ustawienie współczynnika enkodera Slave / enkodera odcinkowego Slave
Pomiędzy enkoderem inkrementalnym do określania liczby obrotowej (G1)i enkoderem inkrementalnym do pomiaru drogi (G2) może znajdować sięprzekładnia mechaniczna. Tę proporcję przełożenia ustawia się za pomocą P231(współczynnik enkodera Slave) / P232 (współczynnik enkodera odcinkowego Slave).
– Równorzędnie:Sygnał enkodera Master na X42 przekazywany jest przez X43 do kolejnegoSlave. Wszystkie Slave otrzymują w ten sposób identyczne sygnały enkoderaMaster.
– Łańcuch:Sygnał enkodera odcinkowego do X41 przekazywany jest przez X43 dokolejnego Slave. Sygnał enkodera odcinkowego staje się tym samym sygnałemenkodera Master następującego Slave.
56512APL
Rys. 1: Bieg synchroniczny z enkoderem odcinkowym równorzędny lub łańcuch
MOVIDRIVE®
Slave
X15
DEH11BDER11B
M
G2
X41
X42DRS11B
X43
G1Enkoder silnika
Przełożenie przekładni i
Enkoder odcinkowy
X42 (kolejny napęd Slave)
Enkoder Master
5
14 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Montaż karty opcji DRS11BMontaż i wskazówki instalacyjne
14 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
5Montaż karty opcji DRS11BMontaż i wskazówki instalacyjne
5 Montaż i wskazówki instalacyjne
5.1 Montaż karty opcji DRS11B
Przed
rozpoczęciem
Kartę opcji DRS11B należy umieścić w gnieździe rozszerzenia [1].
Zanim zaczniesz wkładać / wyjmować kartę opcji, zapoznaj się z poniższymi
wskazówkami:
• Odłączyć napięcie od falownika. Odłącz zasilanie 24 V DC i napięcie sieciowe.
• Zanim dotkniesz karty opcji pozbądź się ładunków elektrycznych na ciele przy użyciuodpowiednich środków (taśma odprowadzająca, obuwie przewodzące itp.).
• Przed montażem karty opcji zdejmij klawiaturę oraz osłonę przednią.
• Po zamontowaniu karty opcji załóż ponownie klawiaturę i osłonę przednią.
• Kartę opcji przechowuj w oryginalnym opakowaniu i wyjmuj dopiero bezpośrednioprzed montażem.
• Kartę opcji trzymaj za krawędź płytki obwodu drukowanego. Nie dotykaj żadnychelementów obwodu.
WSKAZÓWKAKarta opcji DRS11B może być stosowana tylko w MOVIDRIVE® MDX61B
wielkość 1 do 6.
62416AXX
[1]
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 15
5Montaż karty opcji DRS11B
Montaż i wskazówki instalacyjne
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 15
5Montaż karty opcji DRS11B
Montaż i wskazówki instalacyjne
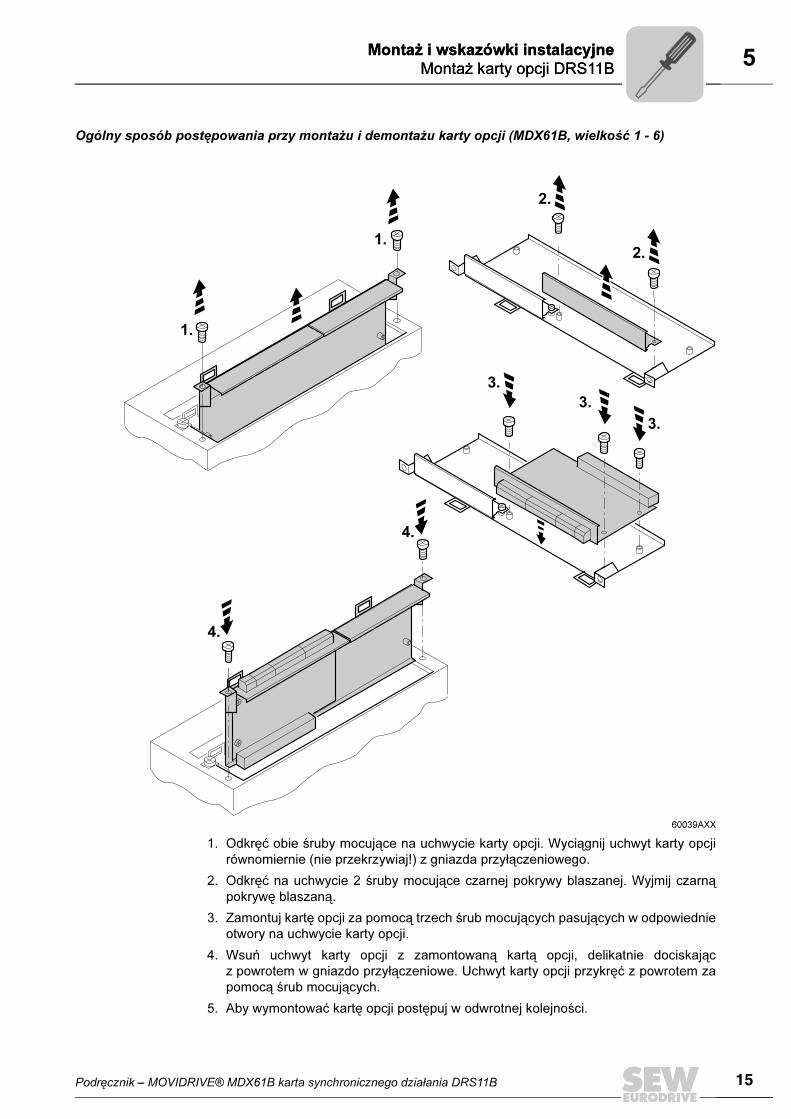
Ogólny sposób postępowania przy montażu i demontażu karty opcji (MDX61B, wielkość 1 - 6)
1. Odkręć obie śruby mocujące na uchwycie karty opcji. Wyciągnij uchwyt karty opcjirównomiernie (nie przekrzywiaj!) z gniazda przyłączeniowego.
2. Odkręć na uchwycie 2 śruby mocujące czarnej pokrywy blaszanej. Wyjmij czarnąpokrywę blaszaną.
3. Zamontuj kartę opcji za pomocą trzech śrub mocujących pasujących w odpowiednieotwory na uchwycie karty opcji.
4. Wsuń uchwyt karty opcji z zamontowaną kartą opcji, delikatnie dociskającz powrotem w gniazdo przyłączeniowe. Uchwyt karty opcji przykręć z powrotem zapomocą śrub mocujących.
5. Aby wymontować kartę opcji postępuj w odwrotnej kolejności.
60039AXX
1.
4.
4.
1.2.
3.
3.
3.
2.
5
16 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Przyłączenie i opis zacisków opcji DRS11BMontaż i wskazówki instalacyjne
16 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
5Przyłączenie i opis zacisków opcji DRS11BMontaż i wskazówki instalacyjne
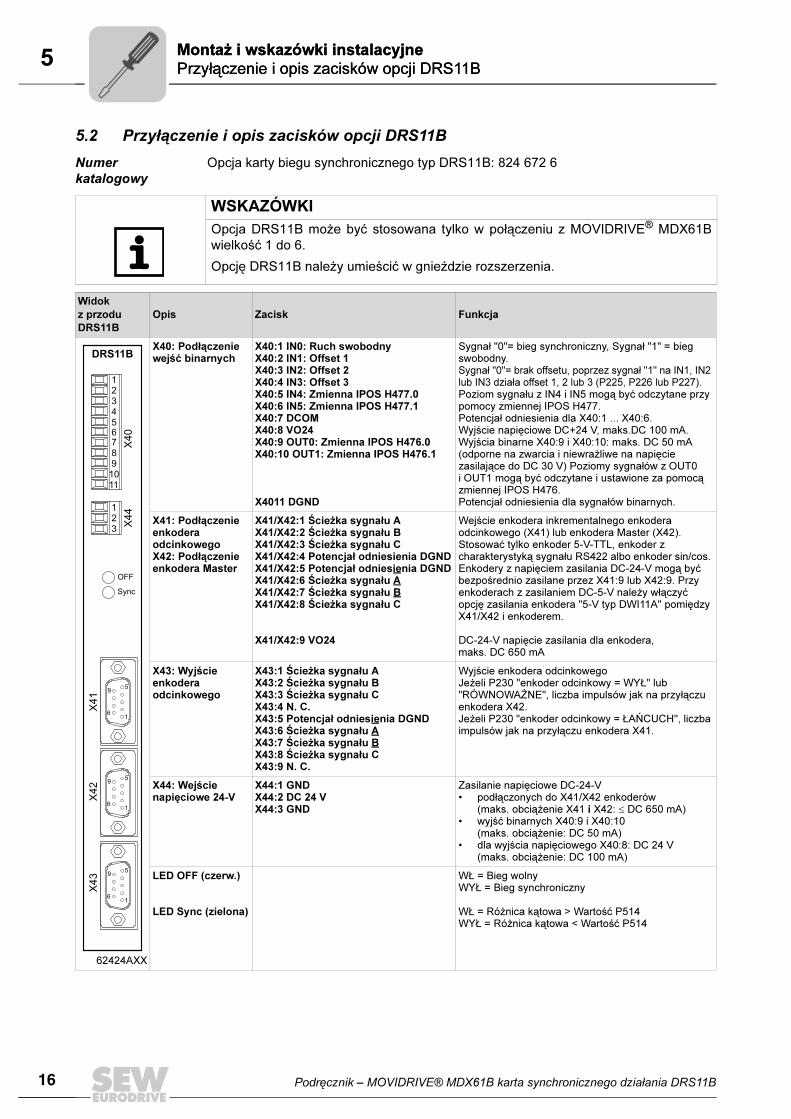
5.2 Przyłączenie i opis zacisków opcji DRS11B
Numer
katalogowy
Opcja karty biegu synchronicznego typ DRS11B: 824 672 6
WSKAZÓWKIOpcja DRS11B może być stosowana tylko w połączeniu z MOVIDRIVE® MDX61Bwielkość 1 do 6.
Opcję DRS11B należy umieścić w gnieździe rozszerzenia.
Widok z przodu DRS11B
Opis Zacisk Funkcja
62424AXX
X40: Podłączenie wejść binarnych
X40:1 IN0: Ruch swobodnyX40:2 IN1: Offset 1X40:3 IN2: Offset 2X40:4 IN3: Offset 3X40:5 IN4: Zmienna IPOS H477.0X40:6 IN5: Zmienna IPOS H477.1X40:7 DCOMX40:8 VO24X40:9 OUT0: Zmienna IPOS H476.0X40:10 OUT1: Zmienna IPOS H476.1
X4011 DGND
Sygnał "0"= bieg synchroniczny, Sygnał "1" = bieg swobodny.Sygnał "0"= brak offsetu, poprzez sygnał "1" na IN1, IN2 lub IN3 działa offset 1, 2 lub 3 (P225, P226 lub P227).Poziom sygnału z IN4 i IN5 mogą być odczytane przy pomocy zmiennej IPOS H477.Potencjał odniesienia dla X40:1 ... X40:6.Wyjście napięciowe DC+24 V, maks.DC 100 mA.Wyjścia binarne X40:9 i X40:10: maks. DC 50 mA (odporne na zwarcia i niewrażliwe na napięcie zasilające do DC 30 V) Poziomy sygnałów z OUT0 i OUT1 mogą być odczytane i ustawione za pomocą zmiennej IPOS H476.Potencjał odniesienia dla sygnałów binarnych.
X41: Podłączenie enkodera odcinkowegoX42: Podłączenie enkodera Master
X41/X42:1 Ścieżka sygnału AX41/X42:2 Ścieżka sygnału BX41/X42:3 Ścieżka sygnału CX41/X42:4 Potencjał odniesienia DGNDX41/X42:5 Potencjał odniesienia DGNDX41/X42:6 Ścieżka sygnału AX41/X42:7 Ścieżka sygnału BX41/X42:8 Ścieżka sygnału C
X41/X42:9 VO24
Wejście enkodera inkrementalnego enkodera odcinkowego (X41) lub enkodera Master (X42). Stosować tylko enkoder 5-V-TTL, enkoder z charakterystyką sygnału RS422 albo enkoder sin/cos. Enkodery z napięciem zasilania DC-24-V mogą być bezpośrednio zasilane przez X41:9 lub X42:9. Przy enkoderach z zasilaniem DC-5-V należy włączyć opcję zasilania enkodera "5-V typ DWI11A" pomiędzy X41/X42 i enkoderem.
DC-24-V napięcie zasilania dla enkodera,maks. DC 650 mA
X43: Wyjście enkodera odcinkowego
X43:1 Ścieżka sygnału AX43:2 Ścieżka sygnału BX43:3 Ścieżka sygnału CX43:4 N. C.X43:5 Potencjał odniesienia DGNDX43:6 Ścieżka sygnału AX43:7 Ścieżka sygnału BX43:8 Ścieżka sygnału CX43:9 N. C.
Wyjście enkodera odcinkowegoJeżeli P230 "enkoder odcinkowy = WYŁ" lub "RÓWNOWAŻNE", liczba impulsów jak na przyłączu enkodera X42.Jeżeli P230 "enkoder odcinkowy = ŁAŃCUCH", liczba impulsów jak na przyłączu enkodera X41.
X44: Wejście napięciowe 24-V
X44:1 GNDX44:2 DC 24 VX44:3 GND
Zasilanie napięciowe DC-24-V• podłączonych do X41/X42 enkoderów
(maks. obciążenie X41 i X42: ≤ DC 650 mA)• wyjść binarnych X40:9 i X40:10
(maks. obciążenie: DC 50 mA)• dla wyjścia napięciowego X40:8: DC 24 V
(maks. obciążenie: DC 100 mA)
LED OFF (czerw.)
LED Sync (zielona)
WŁ = Bieg wolnyWYŁ = Bieg synchroniczny
WŁ = Różnica kątowa > Wartość P514WYŁ = Różnica kątowa < Wartość P514
DRS11B
X40
X44
X41
X42
X43
OFF
Sync
5
1
9
6
5
1
9
6
5
1
9
6
123456789
1011
123
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 17
5Wskazówki dotyczące instalacji
Montaż i wskazówki instalacyjne
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 17
5Wskazówki dotyczące instalacji
Montaż i wskazówki instalacyjne
5.3 Wskazówki dotyczące instalacji
• Maksymalne dopuszczalne długości przewodów wynoszą:
– pomiędzy przetwornicami Master i Slave: 10 m– pomiędzy przetwornicami i należących do nich enkoderów: 100 m
• Stosować należy wyłącznie przewody ekranowane z żyłami skręcanymi parami (A i A,
B i B, C i C) do podłączenia:
– Enkoderów silnika i odcinkowych– Równoważników enkoderów inkrementalnych– Wejścia enkodera w enkoderze Master
• Jeżeli to konieczne, to do X44 należy podłączyć napięcie zasilania DC-24-V. Służyono do zasilania podłączonych do X41 i X42 enkoderów, wyjść binarnych X40:9i X40:10 oraz wyjścia napięciowego X40:8. Należy pamiętać, aby całkowiteobciążenie prądowe na X41 i X42 było ≤ 650 mA.
• Przy podłączaniu enkoderów inkrementalnych z zasilaniem zewnętrznym należypamiętać:
– Potencjał odniesienia enkodera połączyć z przyłączem X10:2 DGND lub X10:10DGND na podstawowym urządzeniu MOVIDRIVE®.
• Polecenie zezwolenia na falowniku Slave dla pracy biegu synchronicznego (przyfabrycznym podłączeniu DI01, DI02 i DI03):
– DI00 (X13:1) = "1" (/blokada stopnia mocy), DI03 (X13:4) = "1" (zezwolenie) i– DI01 (X13:2) = "1" (prawy) lub DI02 (X13:3) = "1" (lewy)
Pamiętaj: Kierunek obrotów Slave w pracy synchronicznej jest określany przezinformację o kierunku obrotów impulsu wartości zadanej od Master do Slave.
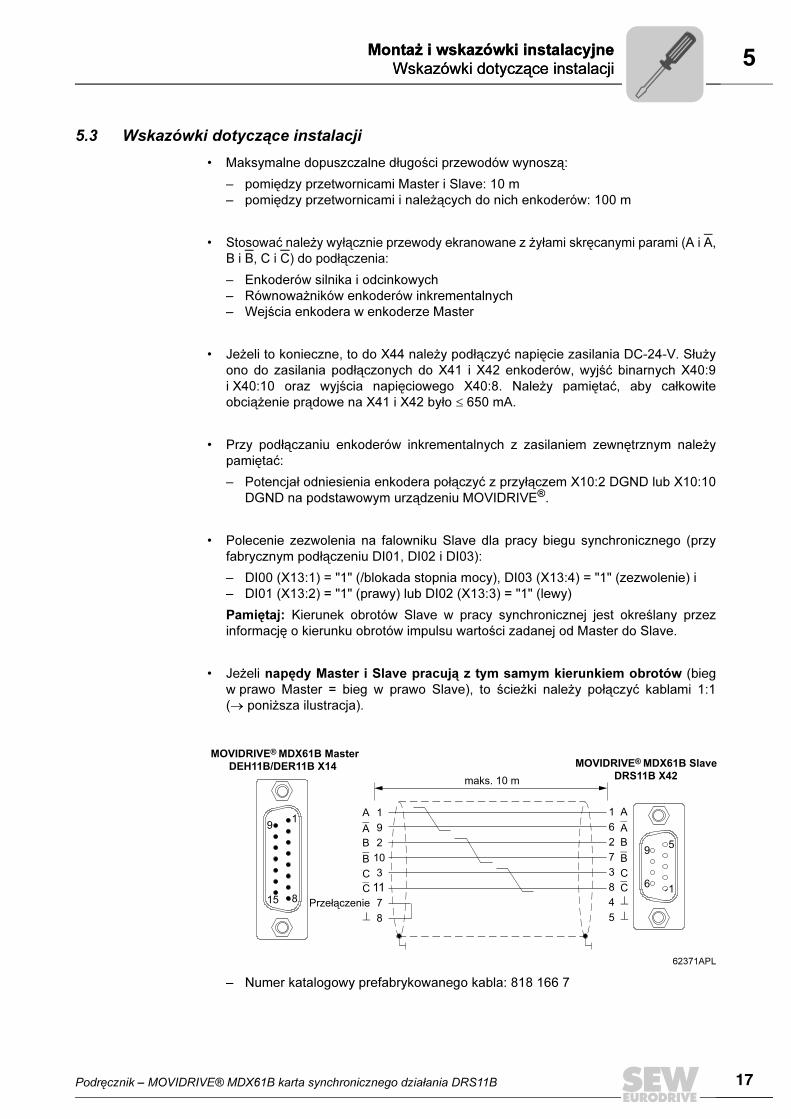
• Jeżeli napędy Master i Slave pracują z tym samym kierunkiem obrotów (biegw prawo Master = bieg w prawo Slave), to ścieżki należy połączyć kablami 1:1(→ poniższa ilustracja).
– Numer katalogowy prefabrykowanego kabla: 818 166 7
62371APL
1
5
6
9
1
8
9
15
MOVIDRIVE® MDX61B Master
DEH11B/DER11B X14 MOVIDRIVE® MDX61B Slave
DRS11B X42maks. 10 m
A
B
C
A
B
C
A
B
C
⊥
A
B
C
192
103
117
1627384⊥⊥ 8 5
Przełączenie
5
18 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Wskazówki dotyczące instalacjiMontaż i wskazówki instalacyjne
18 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
5Wskazówki dotyczące instalacjiMontaż i wskazówki instalacyjne
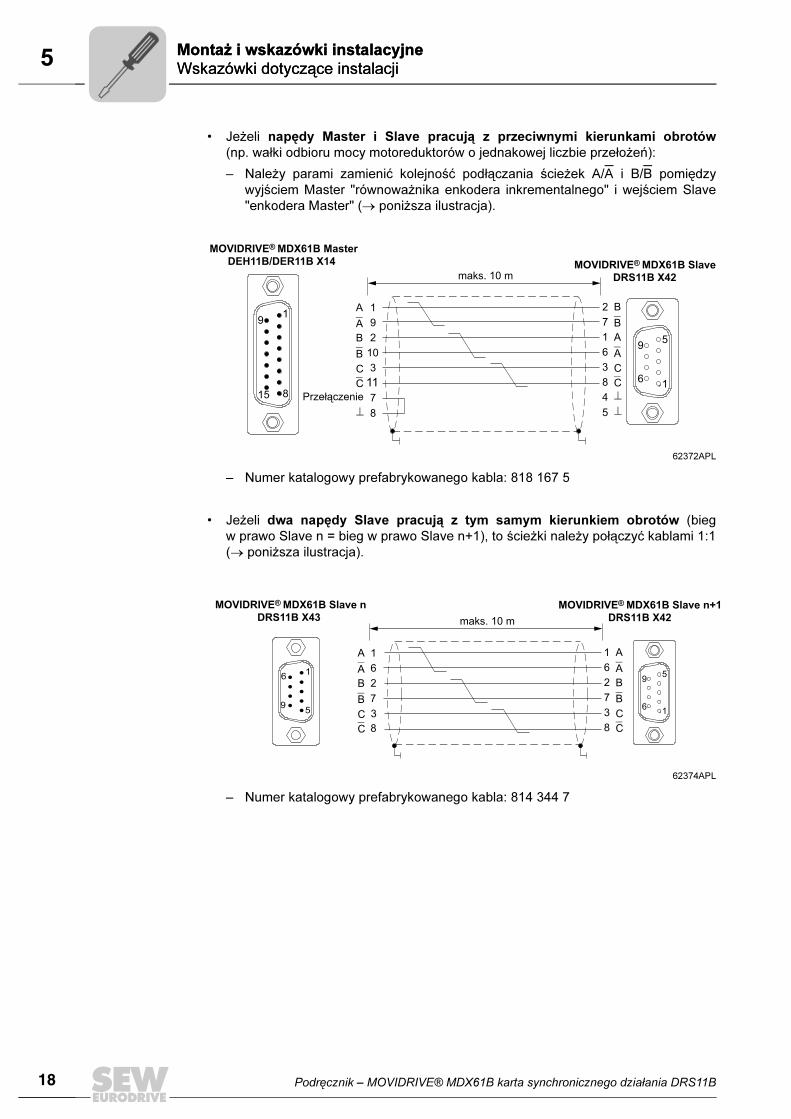
• Jeżeli napędy Master i Slave pracują z przeciwnymi kierunkami obrotów
(np. wałki odbioru mocy motoreduktorów o jednakowej liczbie przełożeń):
– Należy parami zamienić kolejność podłączania ścieżek A/A i B/B pomiędzywyjściem Master "równoważnika enkodera inkrementalnego" i wejściem Slave"enkodera Master" (→ poniższa ilustracja).
– Numer katalogowy prefabrykowanego kabla: 818 167 5
• Jeżeli dwa napędy Slave pracują z tym samym kierunkiem obrotów (biegw prawo Slave n = bieg w prawo Slave n+1), to ścieżki należy połączyć kablami 1:1(→ poniższa ilustracja).
– Numer katalogowy prefabrykowanego kabla: 814 344 7
62372APL
62374APL
1
5
6
9
1
8
9
15
MOVIDRIVE® MDX61B Master
DEH11B/DER11B X14 MOVIDRIVE® MDX61B Slave
DRS11B X42maks. 10 m
A
B
C
A
B
C
B
A
C
⊥
B
A
C
192
103
117
2716384⊥⊥ 8 5
Przełączenie
1
5
6
9
MOVIDRIVE® MDX61B Slave n
DRS11B X43
MOVIDRIVE® MDX61B Slave n+1
DRS11B X42maks. 10 m
A
B
C
A
B
C
A
B
C
A
B
C
162738
162738
1
5
6
9
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 19
5Wskazówki dotyczące instalacji
Montaż i wskazówki instalacyjne
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 19
5Wskazówki dotyczące instalacji
Montaż i wskazówki instalacyjne
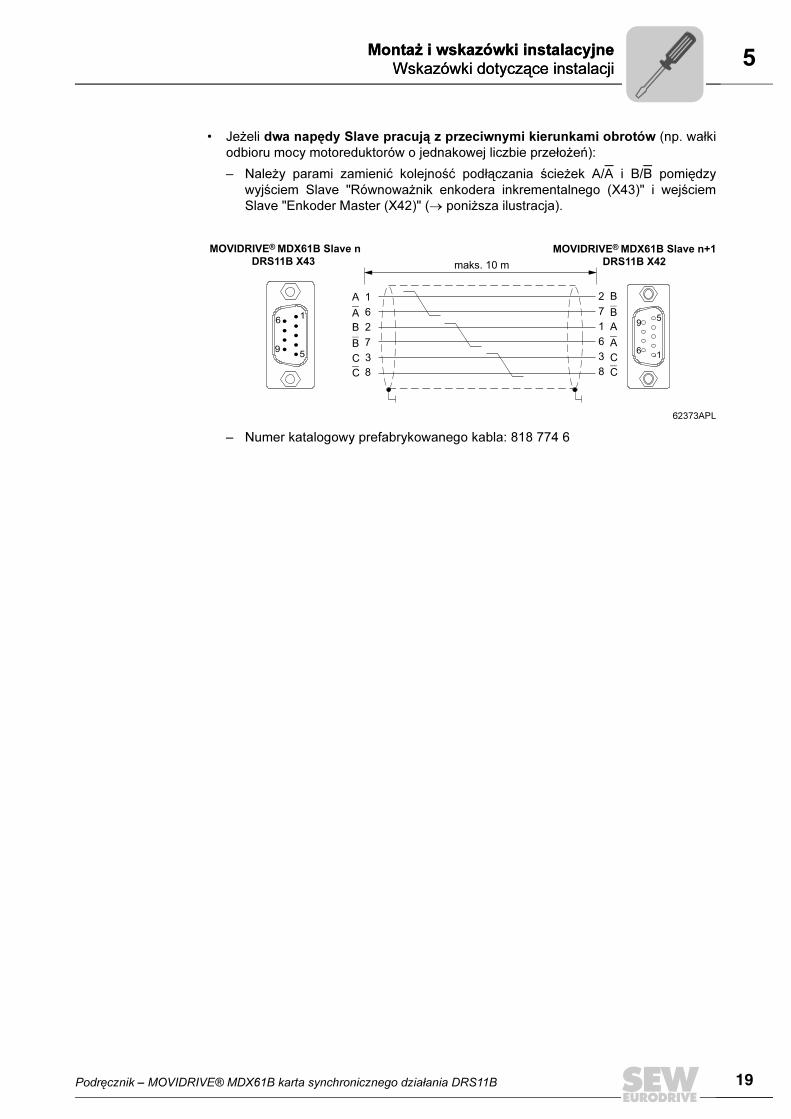
• Jeżeli dwa napędy Slave pracują z przeciwnymi kierunkami obrotów (np. wałkiodbioru mocy motoreduktorów o jednakowej liczbie przełożeń):
– Należy parami zamienić kolejność podłączania ścieżek A/A i B/B pomiędzywyjściem Slave "Równoważnik enkodera inkrementalnego (X43)" i wejściemSlave "Enkoder Master (X42)" (→ poniższa ilustracja).
– Numer katalogowy prefabrykowanego kabla: 818 774 6
62373APL
1
5
6
9
MOVIDRIVE® MDX61B Slave n
DRS11B X43
MOVIDRIVE® MDX61B Slave n+1
DRS11B X42maks. 10 m
A
B
C
A
B
C
B
A
C
B
A
C
162738
271638
1
5
6
9
5
20 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Przykład połączenia MDX61B-Master - MDX61B-SlaveMontaż i wskazówki instalacyjne
20 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
5Przykład połączenia MDX61B-Master - MDX61B-SlaveMontaż i wskazówki instalacyjne
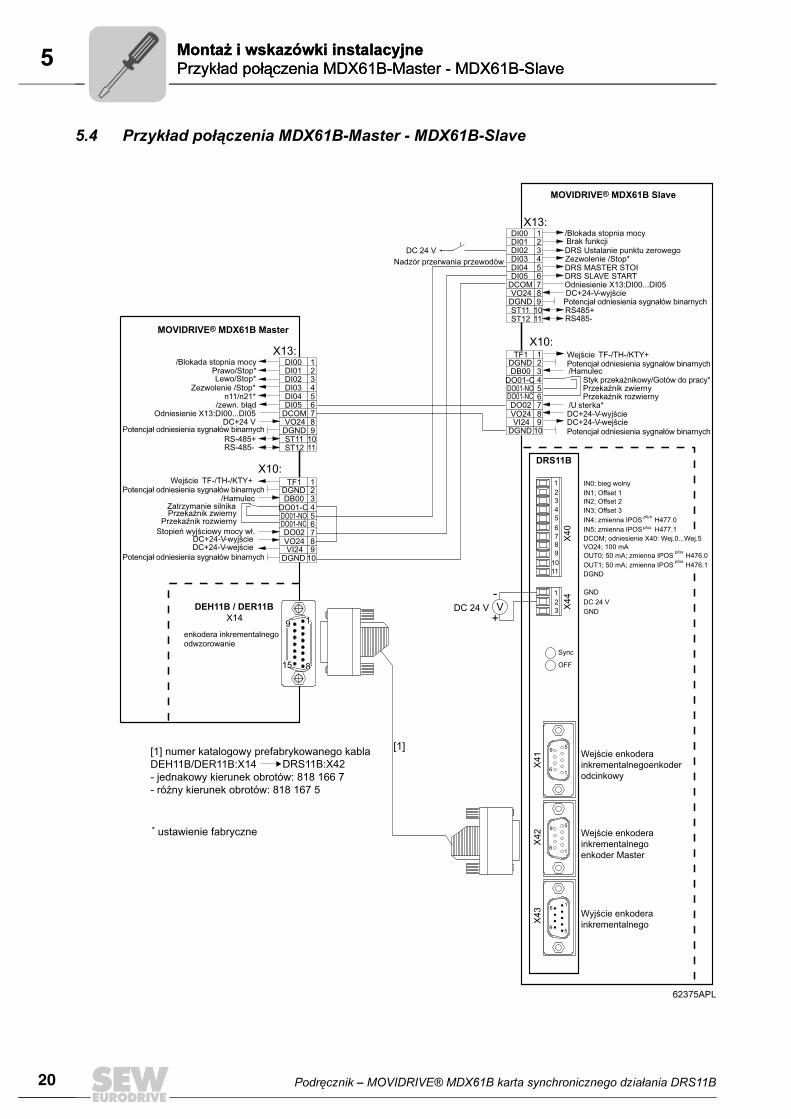
5.4 Przykład połączenia MDX61B-Master - MDX61B-Slave
62375APL
DRS11B
04X
44X
14X
24X
34X
Sync
OFF
1
5
6
9
5
1
9
6
5
1
9
6
123
123
456789
1011
IN0; bieg wolnyIN1; Offset 1IN2; Offset 2IN3; Offset 3IN4; zmienna IPOS plus H477.0IN5; zmienna IPOSplus H477.1DCOM; odniesienie X40: Wej.0...Wej.5VO24; 100 mAOUT0; 50 mA; zmienna IPOS plus H476.0OUT1; 50 mA; zmienna IPOS plus H476.1DGND
GNDDC 24 VGND
Wejście enkodera inkrementalnegoenkoder odcinkowy
Wejście enkodera inkrementalnego enkoder Master
Wyjście enkodera inkrementalnego
DI00 1 /Blokada stopnia mocy
/Hamulec
/U sterka*
DI01DRS Ustalanie punktu zerowegoBrak funkcji2
DI02 3DI03 Zezwolenie /Stop*4DI04 DRS MASTER STOI5DI05 DRS SLAVE START6
DCOM Odniesienie X13:DI00...DI057VO24 DC+24-V-wyjście8
DGND Potencjał odniesienia sygnałów binarnych 9ST11 RS485+
RS485-10
ST12 11
X13:
X10:
X10:
TF1 Wejście TF-/TH-/KTY+1DGND 2DB00 3
DO01-C
DO02
Styk przekaźnikowy/Gotów do pracy*Przekaźnik zwierny Przekaźnik rozwierny
4DO01-NODO01-NC
567
VO24 DC+24-V-wyjście8VI24 DC+24-V-wejście9
DGND 10
DI00 1/Blokada stopnia mocyDI01Prawo/Stop*
Lewo/Stop*2
DI02 3DI03Zezwolenie /Stop* 4DI04n11/n21* 5DI05/zewn. błąd 6
DCOMOdniesienie X13:DI00...DI05 7VO24DC+24 V 8
DGND 9ST11RS-485+
RS-485-10
ST12 11
X13:
/Hamulec
Stopień wyjściowy mocy wł.
Potencjał odniesienia sygnałów binarnych
TF1Wejście TF-/TH-/KTY+ 1DGND 2DB00 3
DO01-C
DO02
Zatrzymanie silnikaPrzekaźnik zwierny
Przekaźnik rozwierny
4DO01-NODO01-NC
567
VO24DC+24-V-wyjście 8VI24DC+24-V-wejście 9
DGND 10
MOVIDRIVE® MDX61B Master
MOVIDRIVE® MDX61B Slave
Nadzór przerwania przewodów
[1][1] numer katalogowy prefabrykowanego kabla DEH11B/DER11B:X14 - jednakowy kierunek obrotów: 818 166 7- różny kierunek obrotów: 818 167 5
DRS11B:X42
-
+VDC 24 V
* ustawienie fabryczne
DEH11B / DER11B
X14
odwzorowanieenkodera inkrementalnego
19
815
DC 24 V
Potencjał odniesienia sygnałów binarnych
Potencjał odniesienia sygnałów binarnych
Potencjał odniesienia sygnałów binarnych
Potencjał odniesienia sygnałów binarnych
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 21
5Podłączenie Enkoder inkrementalny jako Master
Montaż i wskazówki instalacyjne
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 21
5Podłączenie Enkoder inkrementalny jako Master
Montaż i wskazówki instalacyjne
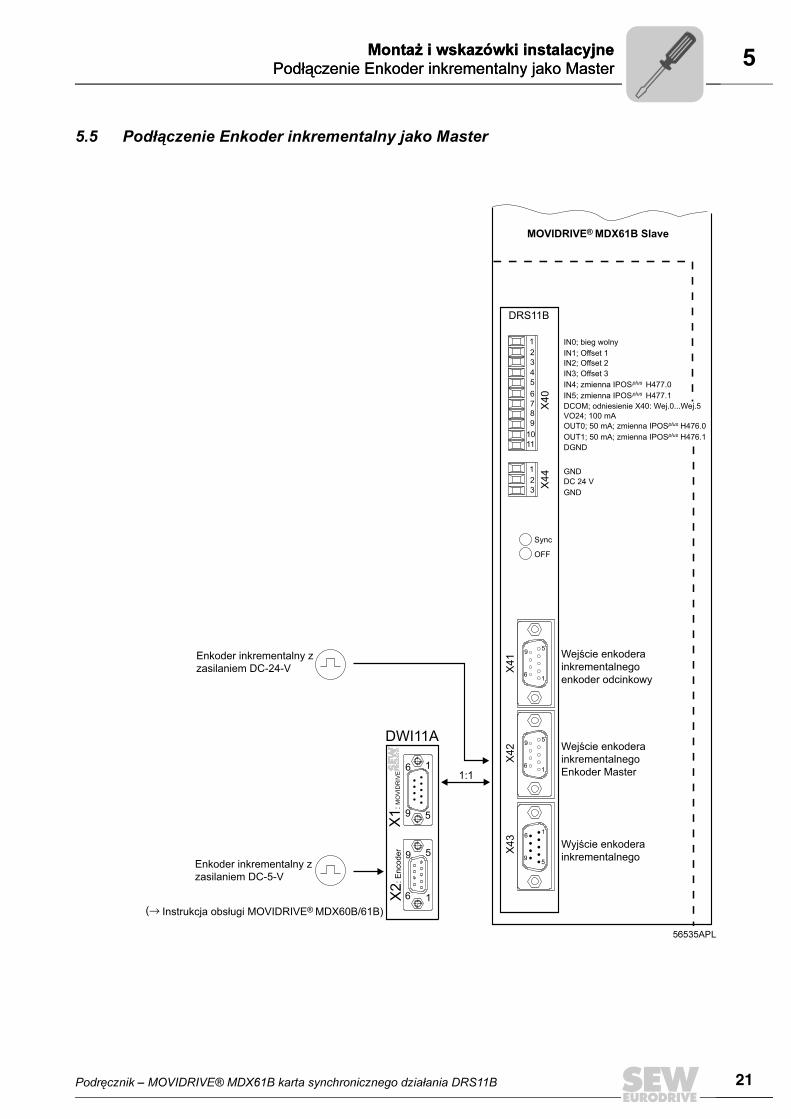
5.5 Podłączenie Enkoder inkrementalny jako Master
56535APL
DRS11B
X40
X44
X41
X42
X43
OFF
Sync
1
5
6
9
5
1
9
6
5
1
9
6
123
123
456789
1011
Enkoder inkrementalny zzasilaniem DC-24-V
Enkoder inkrementalny zzasilaniem DC-5-V
(→ Instrukcja obsługi MOVIDRIVE® MDX60B/61B)
MOVIDRIVE® MDX61B Slave
1:1
IN0; bieg wolnyIN1; Offset 1IN2; Offset 2IN3; Offset 3IN4; zmienna IPOSplus H477.0IN5; zmienna IPOSplus H477.1DCOM; odniesienie X40: Wej.0...Wej.5VO24; 100 mAOUT0; 50 mA; zmienna IPOSplus H476.0OUT1; 50 mA; zmienna IPOSplus H476.1DGND
GNDDC 24 VGND
Wejście enkodera inkrementalnego enkoder odcinkowy
Wejście enkodera inkrementalnego Enkoder Master
Wyjście enkodera inkrementalnego
1
5
6
9
5
1
9
6X2:
Enc
oder
X1:
MO
VID
RIV
E
DWI11A
6
22 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
WprowadzenieUruchomienie
22 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
6WprowadzenieUruchomienie
6 Uruchomienie
6.1 Wprowadzenie
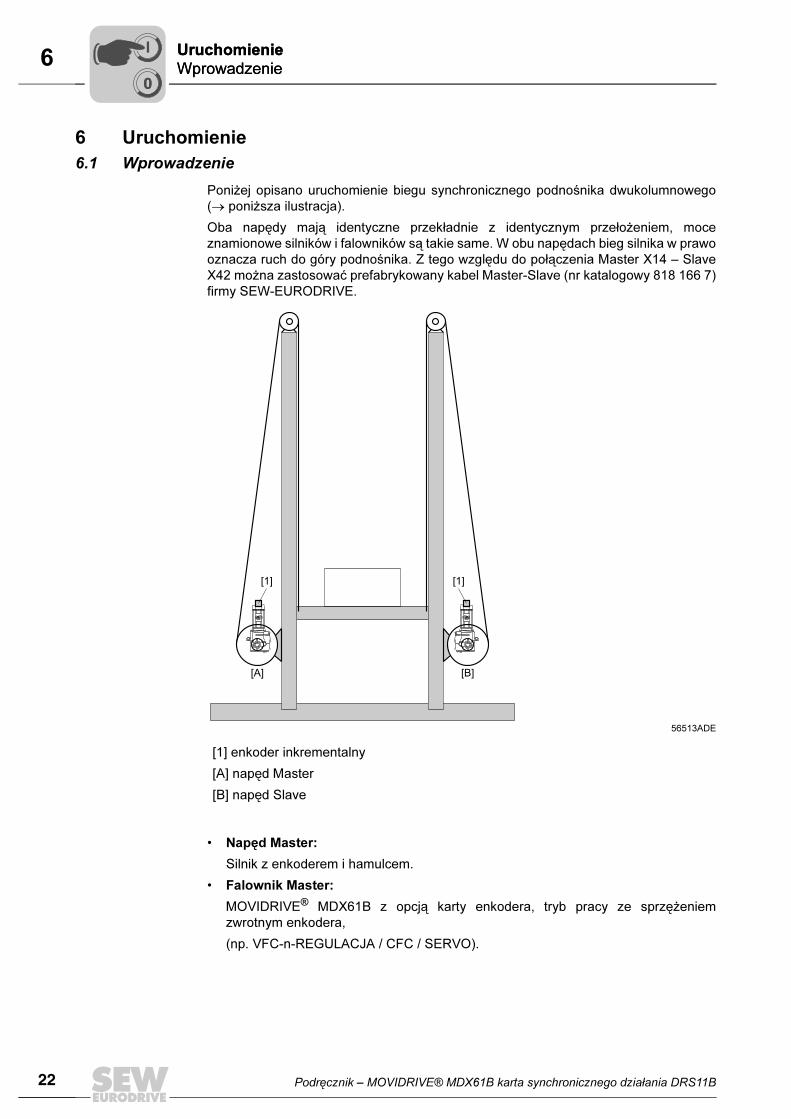
Poniżej opisano uruchomienie biegu synchronicznego podnośnika dwukolumnowego(→ poniższa ilustracja).
Oba napędy mają identyczne przekładnie z identycznym przełożeniem, moceznamionowe silników i falowników są takie same. W obu napędach bieg silnika w prawooznacza ruch do góry podnośnika. Z tego względu do połączenia Master X14 – SlaveX42 można zastosować prefabrykowany kabel Master-Slave (nr katalogowy 818 166 7)firmy SEW-EURODRIVE.
• Napęd Master:
Silnik z enkoderem i hamulcem.
• Falownik Master:
MOVIDRIVE® MDX61B z opcją karty enkodera, tryb pracy ze sprzężeniemzwrotnym enkodera,
(np. VFC-n-REGULACJA / CFC / SERVO).
56513ADE
[1] enkoder inkrementalny
[A] napęd Master
[B] napęd Slave
[B][A]
[1] [1]
00
I
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 23
6Krótki opis uruchomienia
Uruchomienie
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 23
6Krótki opis uruchomienia
Uruchomienie
• Napęd Slave:
Silnik z enkoderem i hamulcem.
• Falownik Slave:
MOVIDRIVE® MDX61B z opcją karty enkodera, tryb pracy ze sprzężeniem zwrotnym
enkodera i bieg synchroniczny, np. VFC-n-REGUL.&SYNC / CFC&SYNC /
SERVO&SYNC z opcją karty biegu synchronicznego DRS11B.
6.2 Krótki opis uruchomienia
Prace wstępne • Sprawdzić okablowanie, obsadzenie zacisków i wyłączniki bezpieczeństwa.
• Odłączyć napędy od maszyny.
• Osobno uruchamiać Master i Slave regulując liczbę obrotów.
• Odpowiednio do zastosowań zaprogramować binarne wejścia i wyjścia.
• Master i Slave uruchomić i przetestować pracę z regulacją obrotów.
Testowanie
sygnałów
enkodera
• Zredukować błąd kątowy pomiędzy Master i Slave za pomocą "DRS określaniepunktu zero".
• Ustawić rodzaj pracy P700 przy Slave na "bieg synchroniczny".
– Silniki asynchroniczne: VFC-n-REGULACJA&SYNC albo CFC&SYNC– Silniki synchroniczne: SERVO&SYNC
• Slave zablokować (/BLOKADA STOPNIA MOCY DI00 = "0") i Master przekręcić.
• LED SYNC (zielona) musi świecić. Jeżeli nie, sprawdzić połączenie enkoderówMaster-Slave.
• Ewentualnie włączyć nadzór enkodera.
Bieg
synchroniczny
Master i Slave
w stanie
zdemontowanym
• Zredukować błąd kątowy pomiędzy Master i Slave za pomocą "DRS Ustalaniepunktu zerowego".
• Wprowadzić zezwolenie dla Slave i uruchomić napęd Master. Slave podąża zaMasterem.
Ustawianie
parametrów
biegu
synchronicznego
• Współczynnik przekładni Master (P221) i współczynnik przekładni Slave (P222)ustawić zgodnie z przełożeniami przekładni.
Bieg
synchroniczny
Master i Slave
przy
zamontowanych
napędach
• Napędy zamontować i wyregulować.
• Zredukować błąd kątowy pomiędzy Master i Slave za pomocą "DRS Ustalaniepunktu zerowego".
• Wprowadzić zezwolenie dla napędów.
• Sprawdzić, czy błąd kątowy w czasie procesów przyspieszania leżyw dopuszczalnym zakresie (→ MOVITOOLS® SCOPE lub zielona LED SYNC).
WSKAZÓWKAJeżeli w MOVIDRIVE® MDX61B napędu Slave wymieniona została opcja DRS11B, tonapędy muszą być na nowo wyregulowane.
00
I
6
24 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Prace wstępne
Uruchomienie
24 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
6Prace wstępne
Uruchomienie
6.3 Prace wstępne
• Włączyć napędy Master i Slave zgodnie ze wskazówkami w instrukcji obsługiMOVIDRIVE® MDX60B/61B oddzielnie w trybie pracy (→ P700) VFC-n-Regulacja,CFC lub SERVO.
• Zaprogramować stosownie do własnych potrzeb obłożenie zacisków Master i Slave.
• Włączyć i przetestować tryb pracy regulacji liczby obrotów obu napędów.
6.4 Aktywacja biegu synchronicznego
Test sygnałów
enkodera
• Zlikwidować ewentualny błąd kątowy (→ zielona LED "SYNC" świeci) pomiędzyMaster i Slave:
– Zaprogramować wejście binarne falownika Slave na funkcję "DRS Ustalaniepunktu zerowego". Sygnał "1" aktywny.
– Przełączyć to wejście binarne "0"→"1"→"0". Zielona dioda LED "SYNC" gaśnie.
• Uaktywnić regulację biegu synchronicznego Slave poprzez ustawienie trybu pracyze sprzężeniem zwrotnym enkodera i biegiem synchronicznym (np. VFC-n-REGULACJA&SYNC, CFC&SYNC, SERVO&SYNC). Na początku pozostawićwszystkie ustawienia fabryczne regulatora biegu synchronicznego.
• Zablokować napęd Slave na DI00 = "0" (blokada stopnia mocy).
• Poruszać tylko napędem Master i obserwować przy tym zieloną diodę LED "SYNC"na DRS11B. Po kilku obrotach napędu Master, dioda LED musi się zaświecić.
• Jeżeli nie zaświeci się zielona dioda LED "SYNC", należy sprawdzić połączenieenkodera pomiędzy Masterem i Slave. Napęd Slave nie otrzymuje w tym wypadkużadnej informacji o drodze od Mastera.
Bieg
synchroniczny
obu napędów
w stanie
zdemontowanym
• Zlikwidować ewentualny błąd kątowy (→ zielona LED "SYNC" świeci) pomiędzyMaster i Slave:
– Zaprogramować wejście binarne falownika Slave na funkcję "DRS Ustalaniepunktu zerowego". Sygnał "1" aktywny.
– Przełączyć to wejście binarne "0"→"1"→"0". Zielona dioda LED "SYNC" gaśnie.
• Mogą Państwo zwolnić Slave w następujący sposób:
– z DI00 = "1" (bez blokady stopnia mocy)– z DI01 = "1" (bieg w prawo) albo DI02 = "1" (bieg w lewo)– z DI03 = "1" (zezwolenie)– z X40:1 = "0" (bez biegu wolnego)
• Jeżeli uruchomią Państwo teraz napęd Master, wówczas napęd Slave za nimpodąży.
STOP!Należy się upewnić, czy
• okablowanie
• obsadzenie zacisków i
• wyłączniki bezpieczeństwa
są właściwe i zostały prawidłowo wykonane.
Należy oddzielić napędy od maszyny w taki sposób, aby pod względem
mechanicznym mogły być eksploatowane niezależnie od siebie. Mato zapobiec
sytuacji, w której przy włączaniu biegu synchronicznego urządzenie mogłoby
zostać uszkodzone przez nieprzewidziane ruchy jezdne.
00
I
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 25
6Test biegu synchronicznego z zamontowanymi napędami
Uruchomienie
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 25
6Test biegu synchronicznego z zamontowanymi napędami
Uruchomienie
Parametryzacja
danych biegu
synchronicznego
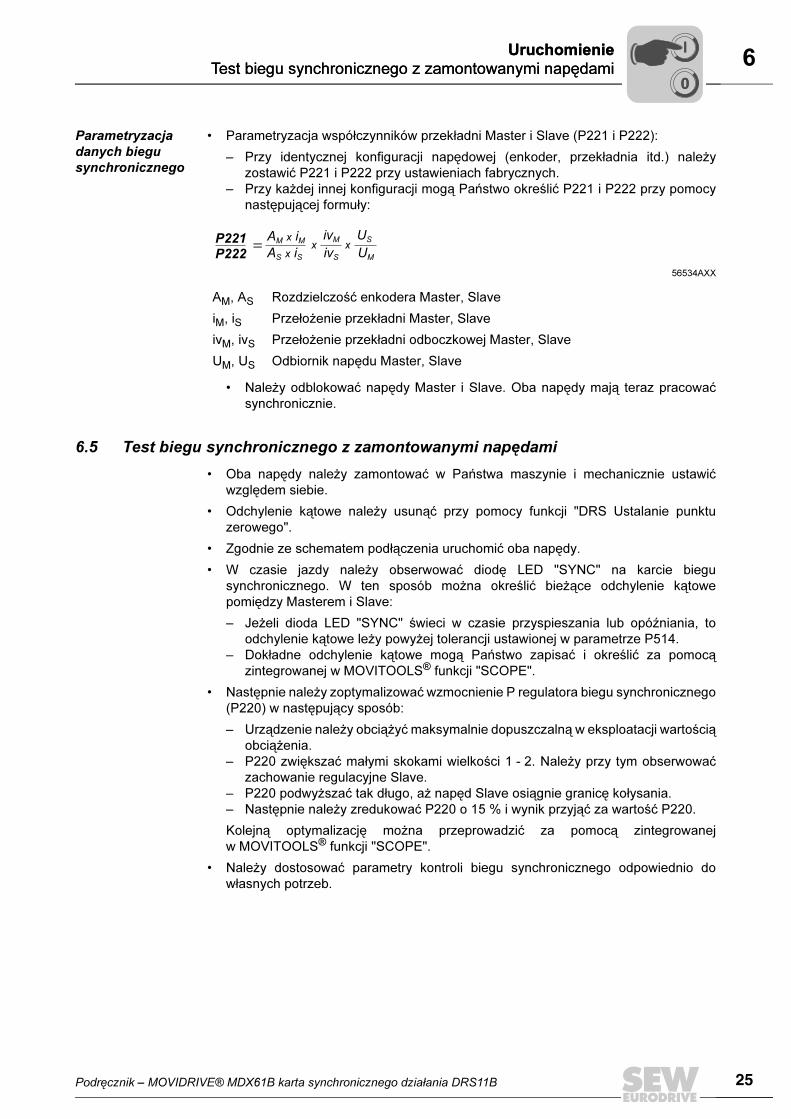
• Parametryzacja współczynników przekładni Master i Slave (P221 i P222):
– Przy identycznej konfiguracji napędowej (enkoder, przekładnia itd.) należyzostawić P221 i P222 przy ustawieniach fabrycznych.
– Przy każdej innej konfiguracji mogą Państwo określić P221 i P222 przy pomocynastępującej formuły:
• Należy odblokować napędy Master i Slave. Oba napędy mają teraz pracowaćsynchronicznie.
6.5 Test biegu synchronicznego z zamontowanymi napędami
• Oba napędy należy zamontować w Państwa maszynie i mechanicznie ustawićwzględem siebie.
• Odchylenie kątowe należy usunąć przy pomocy funkcji "DRS Ustalanie punktuzerowego".
• Zgodnie ze schematem podłączenia uruchomić oba napędy.
• W czasie jazdy należy obserwować diodę LED "SYNC" na karcie biegusynchronicznego. W ten sposób można określić bieżące odchylenie kątowepomiędzy Masterem i Slave:
– Jeżeli dioda LED "SYNC" świeci w czasie przyspieszania lub opóźniania, toodchylenie kątowe leży powyżej tolerancji ustawionej w parametrze P514.
– Dokładne odchylenie kątowe mogą Państwo zapisać i określić za pomocązintegrowanej w MOVITOOLS® funkcji "SCOPE".
• Następnie należy zoptymalizować wzmocnienie P regulatora biegu synchronicznego(P220) w następujący sposób:
– Urządzenie należy obciążyć maksymalnie dopuszczalną w eksploatacji wartościąobciążenia.
– P220 zwiększać małymi skokami wielkości 1 - 2. Należy przy tym obserwowaćzachowanie regulacyjne Slave.
– P220 podwyższać tak długo, aż napęd Slave osiągnie granicę kołysania.– Następnie należy zredukować P220 o 15 % i wynik przyjąć za wartość P220.
Kolejną optymalizację można przeprowadzić za pomocą zintegrowanejw MOVITOOLS® funkcji "SCOPE".
• Należy dostosować parametry kontroli biegu synchronicznego odpowiednio dowłasnych potrzeb.
56534AXX
AM, AS Rozdzielczość enkodera Master, Slave
iM, iS Przełożenie przekładni Master, Slave
ivM, ivS Przełożenie przekładni odboczkowej Master, Slave
UM, US Odbiornik napędu Master, Slave
P221
P222= AM x iM ivM
AS x iS ivS
US
UMxx
00
I
6
26 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Przykłady obliczania P221 i P222
Uruchomienie
26 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
6Przykłady obliczania P221 i P222
Uruchomienie
6.6 Przykłady obliczania P221 i P222
Przykład 1:
Przenośnik
łańcuchowy
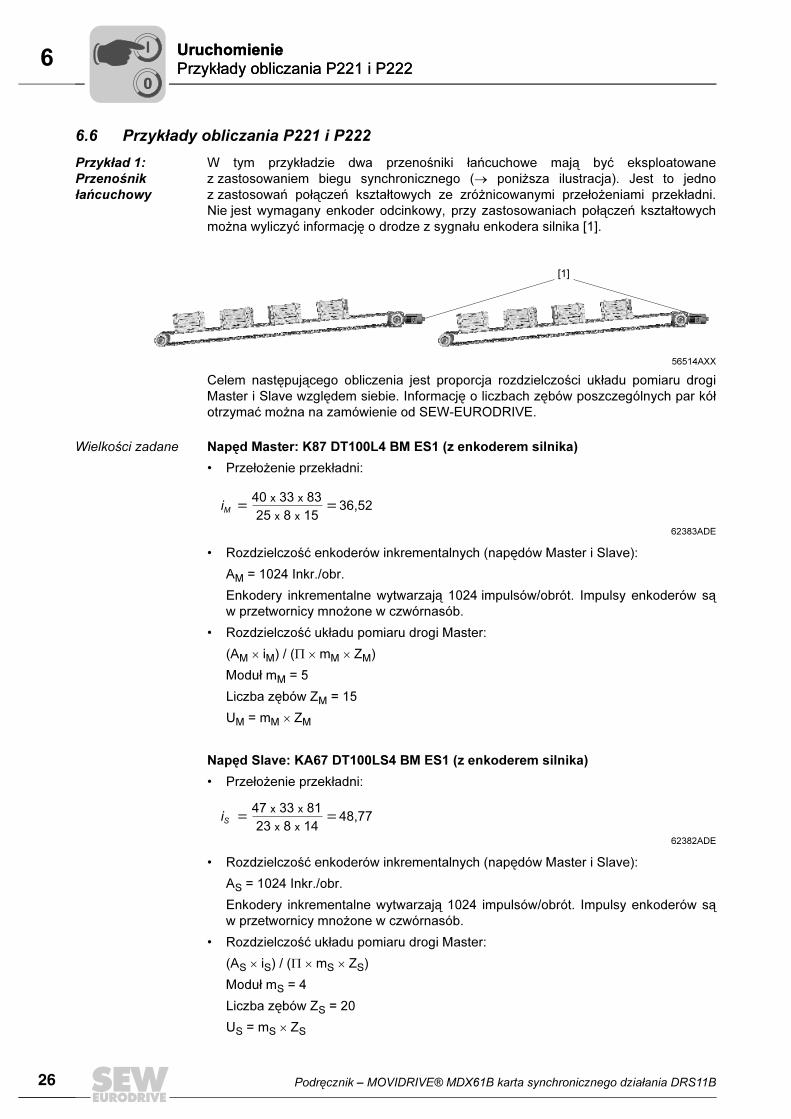
W tym przykładzie dwa przenośniki łańcuchowe mają być eksploatowanez zastosowaniem biegu synchronicznego (→ poniższa ilustracja). Jest to jednoz zastosowań połączeń kształtowych ze zróżnicowanymi przełożeniami przekładni.Nie jest wymagany enkoder odcinkowy, przy zastosowaniach połączeń kształtowychmożna wyliczyć informację o drodze z sygnału enkodera silnika [1].
Celem następującego obliczenia jest proporcja rozdzielczości układu pomiaru drogiMaster i Slave względem siebie. Informację o liczbach zębów poszczególnych par kółotrzymać można na zamówienie od SEW-EURODRIVE.
Wielkości zadane Napęd Master: K87 DT100L4 BM ES1 (z enkoderem silnika)
• Przełożenie przekładni:
• Rozdzielczość enkoderów inkrementalnych (napędów Master i Slave):
AM = 1024 Inkr./obr.
Enkodery inkrementalne wytwarzają 1024 impulsów/obrót. Impulsy enkoderów sąw przetwornicy mnożone w czwórnasób.
• Rozdzielczość układu pomiaru drogi Master:
(AM × iM) / (Π × mM × ZM)
Moduł mM = 5
Liczba zębów ZM = 15
UM = mM × ZM
Napęd Slave: KA67 DT100LS4 BM ES1 (z enkoderem silnika)
• Przełożenie przekładni:
• Rozdzielczość enkoderów inkrementalnych (napędów Master i Slave):
AS = 1024 Inkr./obr.
Enkodery inkrementalne wytwarzają 1024 impulsów/obrót. Impulsy enkoderów sąw przetwornicy mnożone w czwórnasób.
• Rozdzielczość układu pomiaru drogi Master:
(AS × iS) / (Π × mS × ZS)
Moduł mS = 4
Liczba zębów ZS = 20
US = mS × ZS
56514AXX
[1]
62383ADE
62382ADE
iM = =40 x 33 x 83 36,5225 x 8 x 15
iS = =47 x 33 x 81 48,7723 x 8 x 14
00
I
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 27
6Przykłady obliczania P221 i P222
Uruchomienie
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 27
6Przykłady obliczania P221 i P222
Uruchomienie
Przeliczanie Dla tego przykładu należy wprowadzić następujące wartości:
Wynik:
• P221 = 3420928
• P222 = 4282875
Przykład 2:
Zastosowanie
enkodera
odcinkowego
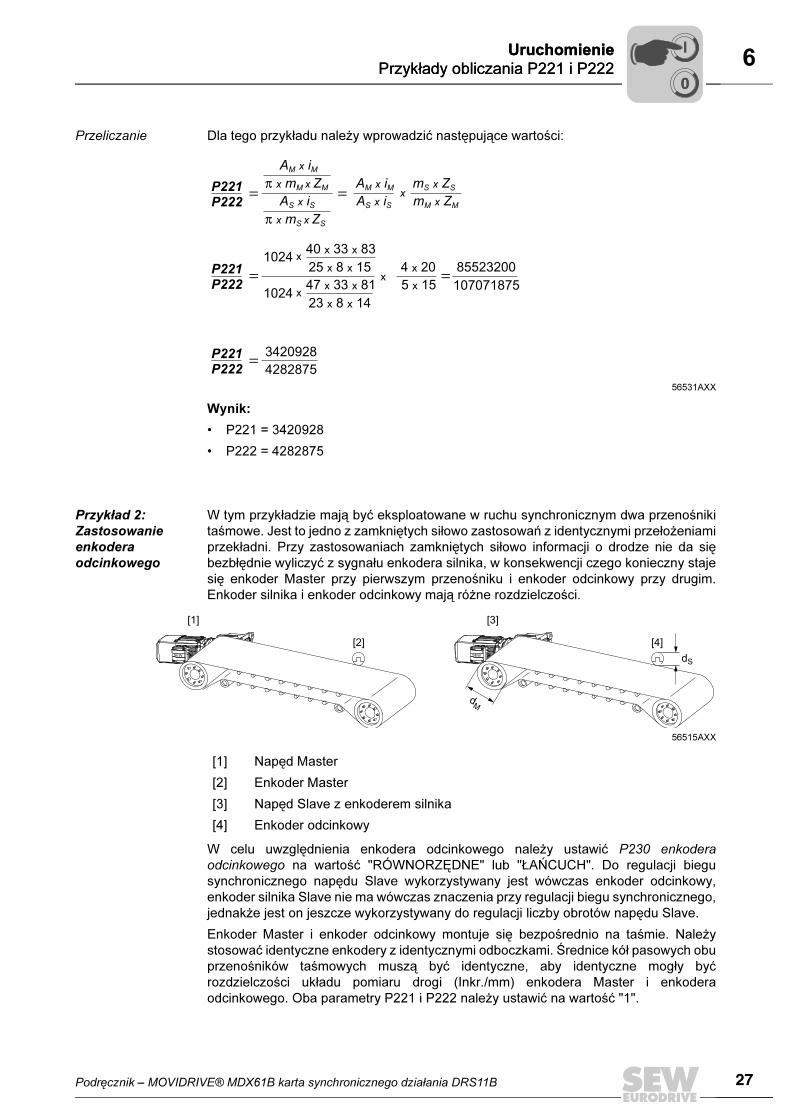
W tym przykładzie mają być eksploatowane w ruchu synchronicznym dwa przenośnikitaśmowe. Jest to jedno z zamkniętych siłowo zastosowań z identycznymi przełożeniamiprzekładni. Przy zastosowaniach zamkniętych siłowo informacji o drodze nie da siębezbłędnie wyliczyć z sygnału enkodera silnika, w konsekwencji czego konieczny stajesię enkoder Master przy pierwszym przenośniku i enkoder odcinkowy przy drugim.Enkoder silnika i enkoder odcinkowy mają różne rozdzielczości.
W celu uwzględnienia enkodera odcinkowego należy ustawić P230 enkodera
odcinkowego na wartość "RÓWNORZĘDNE" lub "ŁAŃCUCH". Do regulacji biegusynchronicznego napędu Slave wykorzystywany jest wówczas enkoder odcinkowy,enkoder silnika Slave nie ma wówczas znaczenia przy regulacji biegu synchronicznego,jednakże jest on jeszcze wykorzystywany do regulacji liczby obrotów napędu Slave.
Enkoder Master i enkoder odcinkowy montuje się bezpośrednio na taśmie. Należystosować identyczne enkodery z identycznymi odboczkami. Średnice kół pasowych obuprzenośników taśmowych muszą być identyczne, aby identyczne mogły byćrozdzielczości układu pomiaru drogi (Inkr./mm) enkodera Master i enkoderaodcinkowego. Oba parametry P221 i P222 należy ustawić na wartość "1".
56531AXX
P221
P222= =
AM x iMAM x iMπ x mM x ZM
AS x iS AS x iSmS x ZS
mM x ZM
π x mS x ZS
x
P221
P222= =x
1024 40 x 33 x 8325 x 8 x 1547 x 33 x 81
4 x 205 x 15
85523200107071875
23 x 8 x 14
x
1024 x
P221
P222= 3420928
4282875
56515AXX
SEWSEW
dM
dS
[1] [3]
[2] [4]
[1] Napęd Master
[2] Enkoder Master
[3] Napęd Slave z enkoderem silnika
[4] Enkoder odcinkowy
00
I
6
28 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Przykłady obliczania P221 i P222
Uruchomienie
28 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
6Przykłady obliczania P221 i P222
Uruchomienie
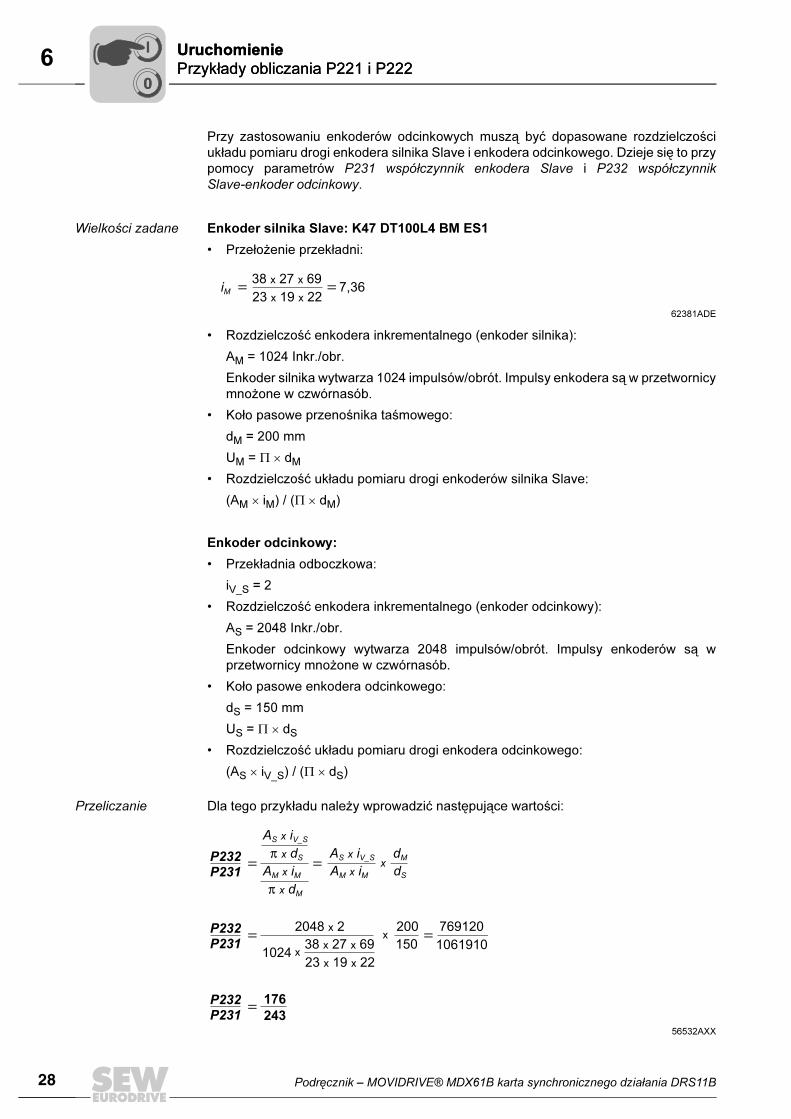
Przy zastosowaniu enkoderów odcinkowych muszą być dopasowane rozdzielczościukładu pomiaru drogi enkodera silnika Slave i enkodera odcinkowego. Dzieje się to przypomocy parametrów P231 współczynnik enkodera Slave i P232 współczynnik
Slave-enkoder odcinkowy.
Wielkości zadane Enkoder silnika Slave: K47 DT100L4 BM ES1
• Przełożenie przekładni:
• Rozdzielczość enkodera inkrementalnego (enkoder silnika):
AM = 1024 Inkr./obr.
Enkoder silnika wytwarza 1024 impulsów/obrót. Impulsy enkodera są w przetwornicymnożone w czwórnasób.
• Koło pasowe przenośnika taśmowego:
dM = 200 mm
UM = Π × dM
• Rozdzielczość układu pomiaru drogi enkoderów silnika Slave:
(AM × iM) / (Π × dM)
Enkoder odcinkowy:
• Przekładnia odboczkowa:
iV_S = 2
• Rozdzielczość enkodera inkrementalnego (enkoder odcinkowy):
AS = 2048 Inkr./obr.
Enkoder odcinkowy wytwarza 2048 impulsów/obrót. Impulsy enkoderów są wprzetwornicy mnożone w czwórnasób.
• Koło pasowe enkodera odcinkowego:
dS = 150 mm
US = Π × dS
• Rozdzielczość układu pomiaru drogi enkodera odcinkowego:
(AS × iV_S) / (Π × dS)
Przeliczanie Dla tego przykładu należy wprowadzić następujące wartości:
62381ADE
iM = =38 x 27 x 69 7,3623 x 19 x 22
56532AXX
P232
P231= =
AS x iV_S
AS x iV_Sπ x dS
AM x iM AM x iMdM
dS π x dM
x
P232
P231= =2048 x 2
38 x 27 x 69200150
7691201061910
23 x 19 x 221024 x
P232
P231= 176
243
x
00
I
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 29
7Proporcja wartości parametrów i liczby obrotowej odbiornika napędu
Parametr
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 29
7Proporcja wartości parametrów i liczby obrotowej odbiornika napędu
Parametr
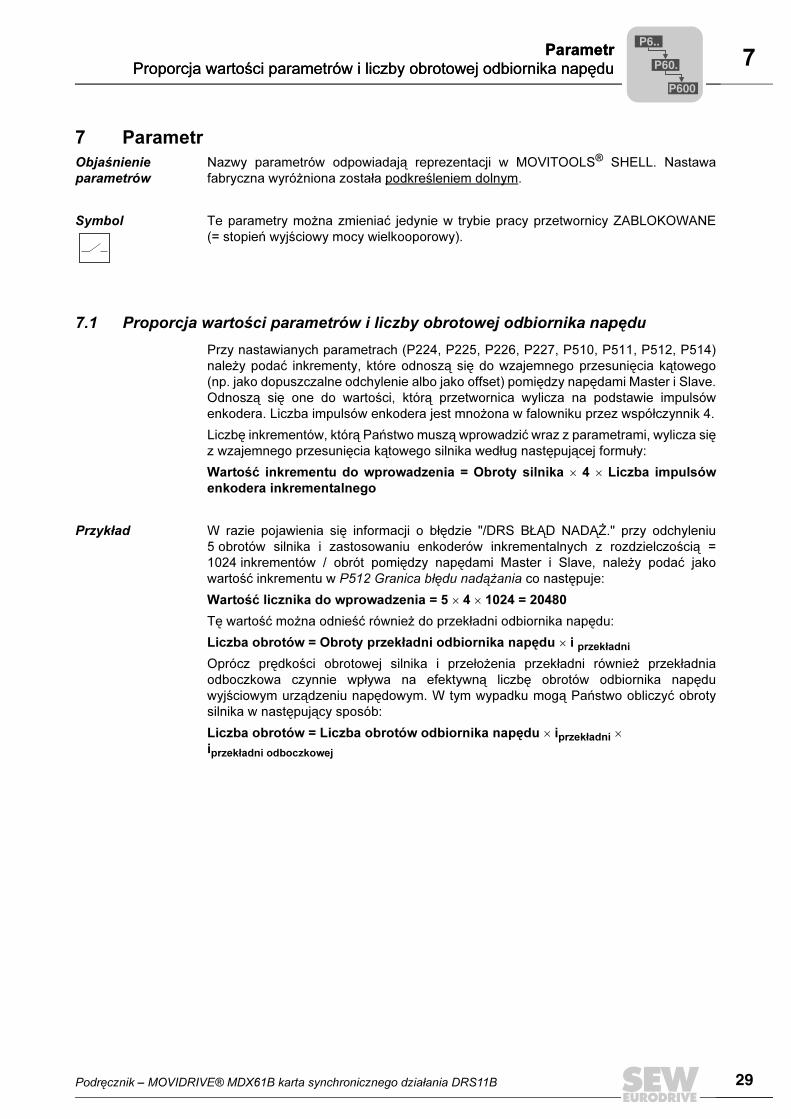
7 Parametr
Objaśnienie
parametrów
Nazwy parametrów odpowiadają reprezentacji w MOVITOOLS® SHELL. Nastawafabryczna wyróżniona została podkreśleniem dolnym.
Symbol Te parametry można zmieniać jedynie w trybie pracy przetwornicy ZABLOKOWANE(= stopień wyjściowy mocy wielkooporowy).
7.1 Proporcja wartości parametrów i liczby obrotowej odbiornika napędu
Przy nastawianych parametrach (P224, P225, P226, P227, P510, P511, P512, P514)należy podać inkrementy, które odnoszą się do wzajemnego przesunięcia kątowego(np. jako dopuszczalne odchylenie albo jako offset) pomiędzy napędami Master i Slave.Odnoszą się one do wartości, którą przetwornica wylicza na podstawie impulsówenkodera. Liczba impulsów enkodera jest mnożona w falowniku przez współczynnik 4.
Liczbę inkrementów, którą Państwo muszą wprowadzić wraz z parametrami, wylicza sięz wzajemnego przesunięcia kątowego silnika według następującej formuły:
Wartość inkrementu do wprowadzenia = Obroty silnika × 4 × Liczba impulsów
enkodera inkrementalnego
Przykład W razie pojawienia się informacji o błędzie "/DRS BŁĄD NADĄŻ." przy odchyleniu5 obrotów silnika i zastosowaniu enkoderów inkrementalnych z rozdzielczością =1024 inkrementów / obrót pomiędzy napędami Master i Slave, należy podać jakowartość inkrementu w P512 Granica błędu nadążania co następuje:
Wartość licznika do wprowadzenia = 5 × 4 × 1024 = 20480
Tę wartość można odnieść również do przekładni odbiornika napędu:
Liczba obrotów = Obroty przekładni odbiornika napędu × i przekładni
Oprócz prędkości obrotowej silnika i przełożenia przekładni również przekładniaodboczkowa czynnie wpływa na efektywną liczbę obrotów odbiornika napęduwyjściowym urządzeniu napędowym. W tym wypadku mogą Państwo obliczyć obrotysilnika w następujący sposób:
Liczba obrotów = Liczba obrotów odbiornika napędu × iprzekładni ×
iprzekładni odboczkowej
P6..
P60.
P600
7
30 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Komunikaty
Parametr
30 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
7Komunikaty
Parametr
7.2 Komunikaty
Zgłaszane są następujące stany w pracy urządzenia:
• Wskaźnik optyczny poprzez diodę LED "SYNC" (zielona) "Wskaźnik LED licznika"(P514):
Przy pomocy diody LED "SYNC" można w czasie uruchamiania pokazać chwilowowystępującą maksymalną różnicę pomiędzy napędami Master i Slave:
– WŁ = Różnica kątowa > Wartość P514– WYŁ = Różnica kątowa < Wartość P514
• Wskaźnik optyczny modułu roboczego poprzez LED "OFF" (czerw.) "BIEG WOLNYSLAVE":
– WŁ = napęd Slave jest w wolnym biegu– WYŁ = napęd Slave jest w biegu synchronicznym
• Meldunek o stanie "DRS SLAVE IN POS":
– na jednym z programowalnych wyjść binarnych (P60_/P61_)
• Komunikat "/DRS OSTRZEŻ.":
– na jednym z programowalnych wyjść binarnych (P60_/P61_)
• Informacja o błędzie "/DRS BŁĄD NADĄŻ.":
– na jednym z programowalnych wyjść binarnych (P60_/P61_)– z wybieralną reakcją napędu na błąd (P834)
P6..
P60.
P600
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 31
7Komunikaty
Parametr
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 31
7Komunikaty
Parametr
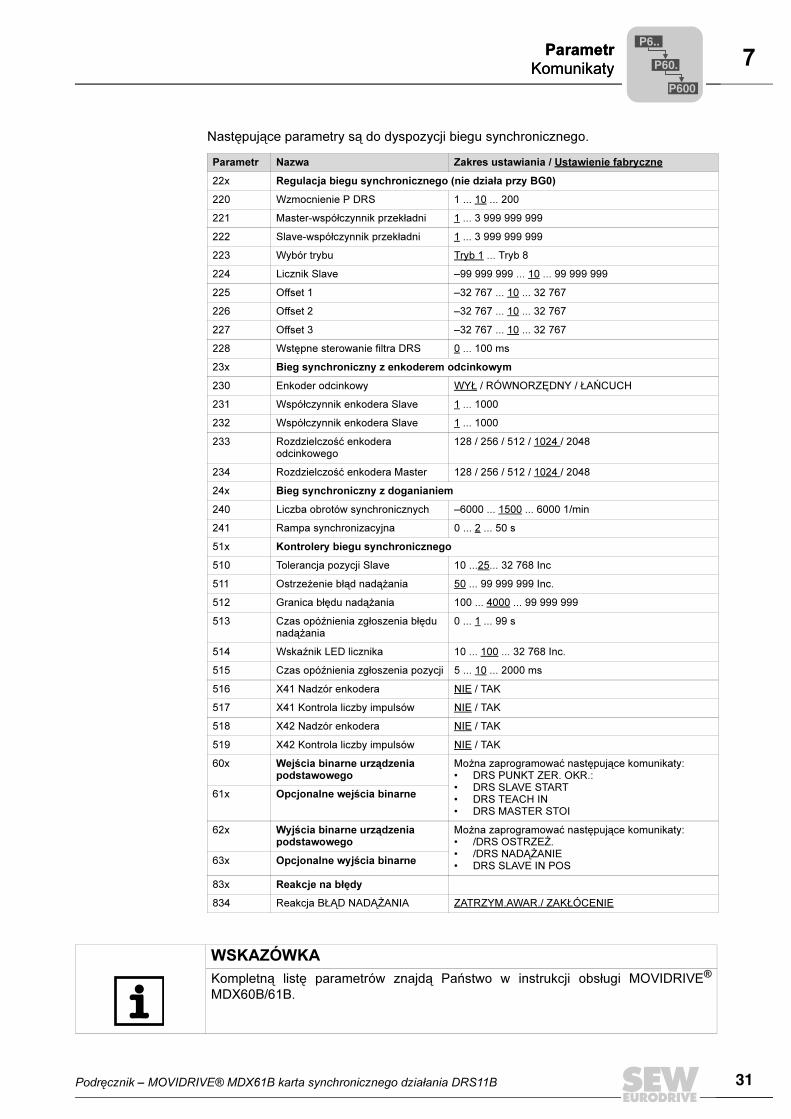
Następujące parametry są do dyspozycji biegu synchronicznego.
Parametr Nazwa Zakres ustawiania / Ustawienie fabryczne
22x Regulacja biegu synchronicznego (nie działa przy BG0)
220 Wzmocnienie P DRS 1 ... 10 ... 200
221 Master-współczynnik przekładni 1 ... 3 999 999 999
222 Slave-współczynnik przekładni 1 ... 3 999 999 999
223 Wybór trybu Tryb 1 ... Tryb 8
224 Licznik Slave –99 999 999 ... 10 ... 99 999 999
225 Offset 1 –32 767 ... 10 ... 32 767
226 Offset 2 –32 767 ... 10 ... 32 767
227 Offset 3 –32 767 ... 10 ... 32 767
228 Wstępne sterowanie filtra DRS 0 ... 100 ms
23x Bieg synchroniczny z enkoderem odcinkowym
230 Enkoder odcinkowy WYŁ / RÓWNORZĘDNY / ŁAŃCUCH
231 Współczynnik enkodera Slave 1 ... 1000
232 Współczynnik enkodera Slave 1 ... 1000
233 Rozdzielczość enkodera odcinkowego
128 / 256 / 512 / 1024 / 2048
234 Rozdzielczość enkodera Master 128 / 256 / 512 / 1024 / 2048
24x Bieg synchroniczny z doganianiem
240 Liczba obrotów synchronicznych –6000 ... 1500 ... 6000 1/min
241 Rampa synchronizacyjna 0 ... 2 ... 50 s
51x Kontrolery biegu synchronicznego
510 Tolerancja pozycji Slave 10 ...25... 32 768 Inc
511 Ostrzeżenie błąd nadążania 50 ... 99 999 999 Inc.
512 Granica błędu nadążania 100 ... 4000 ... 99 999 999
513 Czas opóźnienia zgłoszenia błędu nadążania
0 ... 1 ... 99 s
514 Wskaźnik LED licznika 10 ... 100 ... 32 768 Inc.
515 Czas opóźnienia zgłoszenia pozycji 5 ... 10 ... 2000 ms
516 X41 Nadzór enkodera NIE / TAK
517 X41 Kontrola liczby impulsów NIE / TAK
518 X42 Nadzór enkodera NIE / TAK
519 X42 Kontrola liczby impulsów NIE / TAK
60x Wejścia binarne urządzenia podstawowego
Można zaprogramować następujące komunikaty:• DRS PUNKT ZER. OKR.:• DRS SLAVE START• DRS TEACH IN• DRS MASTER STOI
61x Opcjonalne wejścia binarne
62x Wyjścia binarne urządzenia podstawowego
Można zaprogramować następujące komunikaty:• /DRS OSTRZEŻ.• /DRS NADĄŻANIE• DRS SLAVE IN POS63x Opcjonalne wyjścia binarne
83x Reakcje na błędy
834 Reakcja BŁĄD NADĄŻANIA ZATRZYM.AWAR./ ZAKŁÓCENIE
WSKAZÓWKAKompletną listę parametrów znajdą Państwo w instrukcji obsługi MOVIDRIVE®
MDX60B/61B.
P6..
P60.
P600
7
32 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Opisy parametrów
Parametr
32 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
7Opisy parametrów
Parametr
7.3 Opisy parametrów
P22x regulacja
biegu
synchronicznego
Regulacja biegu synchronicznego (tylko w zestawie parametrów 1).
P220 Wzmocnienie P DRS
Zakres ustawień: 1 ... 10 ... 200
Wzmocnienie regulatora biegu synchronicznego przy Slave. Określa zachowaniaregulacyjne Slave w zależności od różnic kątowych w stosunku do Mastera.
P221 / P222 Współczynnik przekładni Master / współczynnik przekładni Slave
Zakres ustawień: 1 ... 3 999 999 999
Te ustawienia są niezbędne wyłącznie w przetwornicy Slave. Przy zastosowaniu tychparametrów prowadza się proporcję pomiaru drogi pomiędzy Master i Slave. Aby możnabyło realizować nie tylko przełożenia o liczbach całkowitych, wartość przełożeniawprowadza się jako iloraz Master do Slave.
Należy pamiętać, że tylko przy kształtowym przenoszeniu sił (bez poślizgu) możenastępować pomiar drogi przez Master i Slave poprzez enkodery silników. Przywszystkich zastosowaniach, w których przenoszenie siły pomiędzy wałem silnikai maszyną następuje siłowo i tym samym można spodziewać się poślizgu, pomiar drogimusi odbywać się poprzez dodatkowy enkoder (enkoder zewnętrzny). Ten enkodernależy zamocować kształtowo na ruchomej części maszyny.
P223 Wybór trybu Zakres ustawień: 1 / 2 / 3 / 4 / 5 / 6 / 7 / 8
Wybór trybu określa reakcję napędu Slave na sygnał biegu wolnego.
• Tryb 1: Bieg wolny nieograniczony, nowy punkt odniesienia
– Bieg wolny jest aktywny, gdy sygnał "1" dochodzi do X40:1.– Zaciski wejściowe i wartości zadane napędu Slave są czynne w biegu wolnym.– Wytworzone w biegu wolnym wzajemne przesunięcie kątowe nie jest odrabiane
przy ponownej synchronizacji.
• Tryb 2: Bieg wolny nieograniczony, odrabianie powstałej różnicy
– Bieg wolny jest aktywny, gdy sygnał "1" dochodzi do X40:1.– Zaciski wejściowe i wartości zadane napędu Slave są czynne w biegu wolnym.– Wytworzone w biegu wolnym wzajemne przesunięcie kątowe jest odrabiane przy
ponownej synchronizacji.
• Tryb 3: Bieg wolny nieograniczony, odrabianie powstałej różnicy + P224
– Bieg wolny jest aktywny, gdy sygnał "1" dochodzi do X40:1.– Zaciski wejściowe i wartości zadane napędu Slave są czynne w biegu wolnym.– Przy ponownym synchronizowaniu dodatkowo nadrabiana jest różnica do starej
pozycji synchronizacyjnej zapamiętanej w P224.
• Tryb 4: Bieg wolny ograniczony przez P224 licznik Slave, odrabianie powstałejróżnicy
– Bieg wolny aktywowany jest przez sygnał "1" (>100 ms) na X40:1.– W czasie biegu wolnego działają zaciski wejściowe i wartości zadane napędu
Slave.– Bieg wolny kończy się, gdy osiągnięta zostanie wprowadzona w P224 różnica
kątowa. Wówczas różnica kątowa redukowana jest do zera.
P6..
P60.
P600
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 33
7Opisy parametrów
Parametr
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 33
7Opisy parametrów
Parametr
• Tryb 5: Bieg wolny ograniczony przez P224 licznik Slave, nowy punkt odniesienia
– Bieg wolny aktywowany jest przez sygnał "1" (>100 ms) na X40:1.– W czasie biegu wolnego działają zaciski wejściowe i wartości zadane napędu
Slave.– Bieg wolny kończy się, gdy osiągnięta zostanie wprowadzona w P224 różnica
kątowa.– Jeżeli przed zakończeniem biegu wolnego na X40:1 pojawi się ponownie
sygnał HIGH, wzrasta wartość,przy której kończy się bieg wolny o wielkośćwprowadzoną do P224.
– Napęd Slave synchronizuje się na nową różnicę kątową.
• Tryb 6: Przejściowa różnica kątowa, nowy punkt odniesienia
– Bieg wolny jest aktywny, gdy sygnał "1" dochodzi do X40:1.– Zaciski wejściowe i wartości zadane napędu Slave są czynne w biegu wolnym.– Wytworzone w biegu wolnym wzajemne przesunięcie kątowe nie jest odrabiane
przy ponownej synchronizacji.– Sygnał "1" na X40:2, X40:3 albo X40:4 DRS11B aktywuje przesunięcie kątowe.
Dane przesunięcie kątowe przechowywane jest w parametrach P225, P226i P227.
– Jeżeli do zacisków wejściowych X40:2, X40:3 albo X40:4 doprowadzi sięsygnał "0", przesunięcie kątowe ponownie zostanie nadrobione.
• Tryb 7: Przesunięcie kątowe pozostaje (dostosowanie faz), nowy punkt odniesienia
– Bieg wolny jest aktywny, gdy sygnał "1" dochodzi do X40:1.– Zaciski wejściowe i wartości zadane napędu Slave są czynne w biegu wolnym.– Wytworzone w biegu wolnym wzajemne przesunięcie kątowe nie jest odrabiane
przy ponownej synchronizacji.– Sygnał "1" na X40:2, X40:3 albo X40:4 DRS11B aktywuje przesunięcie kątowe.
Dane przesunięcie kątowe przechowywane jest w parametrach P225, P226i P227.
– Jeżeli do zacisków wejściowych X40:2, X40:3 albo X40:4 ponownie doprowadzisię sygnał "0", przesunięcie kątowe pozostaje.
– Jeżeli sygnał wejściowy trwa dłużej niż 3 sekundy, jest korygowany czteremadziałaniami na sekundę.
• Tryb 8: Bieg wolny nieograniczony, nowy punkt odniesienia
– Bieg wolny jest aktywny, gdy sygnał "1" dochodzi do X40:1.– Zaciski wejściowe i wartości zadane napędu Slave są czynne w biegu wolnym.– Jeżeli do zacisku wejściowego X40:1 dochodzi sygnał "0", to napęd Slave
synchronizuje się z aktualną pozycją napędu Master plus zapisana w P224różnica pozycji.
WSKAZÓWKANowy offset mogą Państwo wówczas aktywować, gdy wcześniejsze przesunięciekątowe zostanie nadrobione.
P6..
P60.
P600
7
34 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Opisy parametrów
Parametr
34 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
7Opisy parametrów
Parametr
P224 Licznik Slave Zakres ustawień: –99 999 999 ... 10 ... 99 999 999 Inc
Jako licznik Slave określa się aktywowaną w trybach 3, 4, 5 i 8 różnicę kątową donapędu Master. W przeciwieństwie do offsetu to przesunięcie kątowe ustawia się przezfunkcję "Teach In". W zależności od trybu służy jako wartość graniczna dla bieguwolnego albo wyznacza napędowi Slave pozostającą różnicę kątową do napędu Master(= nowy punkt odniesienia).
P225 / P226 / P227 offset 1 / 2 / 3
Zakres ustawień: –32 767 ... 10 ... 32 767 Inc; działa jedynie w trybie 6 albo w trybie 7!
Trzy osobno ustawiane różnice kątowe, na które programuje się napęd Slave na czastrwania sygnału "1" na X40:2 / X40:3 / X40:4.
Wstępne sterowanie filtra DRS
Zakres ustawień: 0 ... 100 ms
Wartość zadana wstępnego sterowania filtra regulacji biegu synchronicznego DRS11B.W celu osiągnięcia optymalnego wysterowania wstępnego przyspieszania w napędzieSlave, należy filtrować liczbę obrotów Master (określoną na DRS). Do filtrowania należywprowadzić stałą czasu filtrowania. Wartość 0 oznacza przy tym niefiltrowaną liczbęobrotów Mastera.
P23x Bieg
synchroniczny
z enkoderem
odcinkowym
Bieg synchroniczny z enkoderem odcinkowym (tylko w zestawie parametrów 1).
Przy wszystkich zastosowaniach, w których przenoszenie mocy pomiędzy wałem silnikai maszyną odbywa się w sposób zamknięty siłowo i tym samym można się spodziewaćpoślizgu, pomiar drogi należy przeprowadzić z zastosowaniem zewnętrznego enkodera(= enkodera odcinkowego).
P230 Enkoder odcinkowy
Zakres ustawień: WYŁ .. RÓWNORZĘDNY ... ŁAŃCUCH
• WYŁ.: Regulacja biegu synchronicznego sygnałami podłączonego enkodera silnika.P231 i P232 nie działają.
• RÓWNORZĘDNE: Przekazanie sygnałów X42: "Enkoder Master" na X43: "Wyjścieenkodera inkrementalnego". Ocena P231 i P232.
• ŁAŃCUCH: Przekazanie sygnałów X41: "Wejście enkodera odcinkowego" na X43:"Wyjście enkodera inkrementalnego". Ocena P231 i P232.
P231 / P232 Współczynnik enkodera Slave / Współczynnik enkodera odcinkowego Slave
Zakres ustawień: 1 .. 1000
Pomiędzy oboma enkoderami znajduje się w większości wypadków mechaniczneprzełożenie. To przełożenie należy ustawić przy pomocy parametrów.
P233 Rozdzielczość enkodera odcinkowego
Zakres ustawień: 128 / 256 / 512 / 1024 / 2048
Ustawienie rozdzielczości podłączonego enkodera odcinkowego.
P234 Rozdzielczość enkodera Master
Zakres ustawień: 128 / 256 / 512 / 1024 / 2048
Ustawienie rozdzielczość podłączonego enkodera Master.
P24x Bieg
synchroniczny
z doganianiem
Bieg synchroniczny z doganianiem (tylko w zestawie parametrów 1).
Jeżeli przełączymy napęd Slave na bieg synchroniczny, to w zależności od włączonegotrybu pracy następuje redukcja aktualnego przesunięcia kątowego względem napęduMaster. Aby kontynuować ten proces pod kontrolą, można parametryzować zarównosynchronizującą liczbę obrotów jak i rampę synchronizacyjną.
P240 synchroniczna prędkość obrotowa
Zakres ustawień: 0 ... 1500 ... 6000 1/min
Ten parametr podaje liczbę obrotów procesu doganiania.
P6..
P60.
P600
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 35
7Opisy parametrów
Parametr
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 35
7Opisy parametrów
Parametr
P241 Rampa synchronizacyjna
Zakres ustawień: 0 ... 2 ... 50 s
Wartość bezwzględna rampy przyspieszającej dla synchronizacji napędu Slave donapędu Master. Ustawienie zero oznacza maksymalnie możliwe przyspieszenie.
P51x Kontrolery
biegu
synchronicznego
Kontrolery biegu synchronicznego.
P510 tolerancja pozycji Slave
Zakres ustawień: 10 ... 25 ... 32 768 Inc
Do dokładnego pozycjonowania napędu Slave muszą być spełnione różne warunki.Hamulec napędu Slave zadziała, gdy zostaną spełnione wszystkie poniższe warunki:
• Funkcja hamowania napędu Slave została aktywowana
• Napęd Master stoi
• Napęd Master nie ma zasilania (= Stan falownika ZABLOKOWANY)
• Napęd Slave stoi i znajduje się w oknie pozycyjnym
P511 Ostrzeżenie błąd nadążania
Zakres ustawień: 50 ... 99 999 999 Inc
Jeżeli przesunięcie kątowe przekracza ustawioną tu wartość, pojawia się komunikatostrzegawczy. Jest to niezależne od rodzaju pracy napędu Slave.
P512 granica błędu nadążania
Zakres ustawień: 100 ... 4000 ... 99 999 999 Inc
Jeżeli przesunięcie kątowe przekracza ustawioną tu wartość, to pojawia się informacjao błędzie F42 "błąd nadążania". Jest to niezależne od tego, czy napęd Slave pracujew biegu wolnym czy synchronicznym.
P513 Czas opóźnienia informacji o błędzie nadążania
Zakres ustawień: 0 ... 1 ... 99 s
Dla ustawianego czasu wyświetlania przy przejściu z biegu wolnego do biegusynchronicznego mogą być tłumione meldunki "Ostrzeż. błąd nadążania" i "Granicabłędu nadążania" jako meldunki o błędzie wzgl. jako emisja na wyjście binarne.
P514 Licznik wskaźnika LED
Zakres ustawień: 10 ... 100 ... 32 768 Inc
Jeżeli przesunięcie kątowe przekracza ustawioną tu wartość, to informuje o tymświecąca dioda LED V1 (zielona). W ten sposób natychmiast ukazywana jestmaksymalna różnica występująca pomiędzy napędami Master i Slave. Jest to bardzopomocne przy uruchamianiu.
P515 Czas opóźnienia zgłoszenia pozycji
Zakres ustawień: 5 ... 10 ... 2000 ms
Binarny meldunek wyjściowy DRS SLAVE IN POS tworzony jest dopiero wówczas, gdynapędy Master i Slave znajdą się w czasie określonym przez P510 tolerancja pozycjiSlave.
WSKAZÓWKAPrzyspieszanie albo opóźnianie napędu Slave z biegu synchronicznego do bieguwolnego można ustawić parametrami P130 ... P134.
P6..
P60.
P600
7
36 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Opisy parametrów
Parametr
36 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
7Opisy parametrów
Parametr
P516 X41 Nadzór enkodera
Zakres ustawień: NIE / TAK
• NIE: Przerwanie przewodu pomiędzy przetwornicą częstotliwości i podłączonymdo X41 enkoderem TTL nie jest bezpośrednio rozpoznana. W razie uszkodzonegopołączenia w stanie zwolnionym pojawia się błąd F42 "Błąd nadążania", o ile niezostał wyłączony.
• TAK: Przerwanie przewodu pomiędzy przetwornicą częstotliwości i podłączonymdo X41 enkoderem TTL jest bezpośrednio rozpoznana. W wypadku błędu następujemeldunek o błędzie F48 "Hardware DRS". Ten meldunek jest generowany równieżw stanie zablokowanym.
P517 X41 Kontrola liczby impulsów
Zakres ustawień: NIE / TAK
Liczba impulsów podłączonego do X41 enkodera weryfikowana jest z ustawionąw P233 rozdzielczością poprzez analizę ścieżki C. Jeżeli zginą inkrementy,to wydawany jest meldunek o błędzie F48 "Hardware DRS".
• NIE: Kontrola liczby impulsów nie została uaktywniona.
• WŁ: Kontrola liczby impulsów jest aktywna.
P518 X42 Nadzór enkodera
Zakres ustawień: NIE / TAK
• NIE: Przerwanie przewodu pomiędzy przetwornicą częstotliwości i podłączonymdo X42 enkoderem TTL nie jest bezpośrednio rozpoznana. W razie uszkodzonegopołączenia w stanie zwolnionym pojawia się błąd F42 "Błąd nadążania", o ile niezostał wyłączony.
• TAK: Przerwanie przewodu pomiędzy przetwornicą częstotliwości i podłączonymdo X41 enkoderem TTL jest bezpośrednio rozpoznana. W wypadku błędu następujemeldunek o błędzie F48 "Hardware DRS". Ten meldunek jest generowany równieżw stanie zablokowanym.
P519 X42 Kontrola liczby impulsów
Zakres ustawień: NIE / TAK
Liczba impulsów podłączonego do X42 enkodera weryfikowana jest z ustawionąw P234 rozdzielczością poprzez analizę ścieżki C. Jeżeli zginą inkrementy,to wydawany jest meldunek o błędzie F48 "Hardware DRS".
• NIE: Kontrola liczby impulsów nie została uaktywniona.
• TAK: Kontrola liczby impulsów jest aktywna.
WSKAZÓWKANadzorowanie enkodera nie jest funkcją istotną dla bezpieczeństwa!
WSKAZÓWKANadzorowanie enkodera nie jest funkcją istotną dla bezpieczeństwa!
P6..
P60.
P600
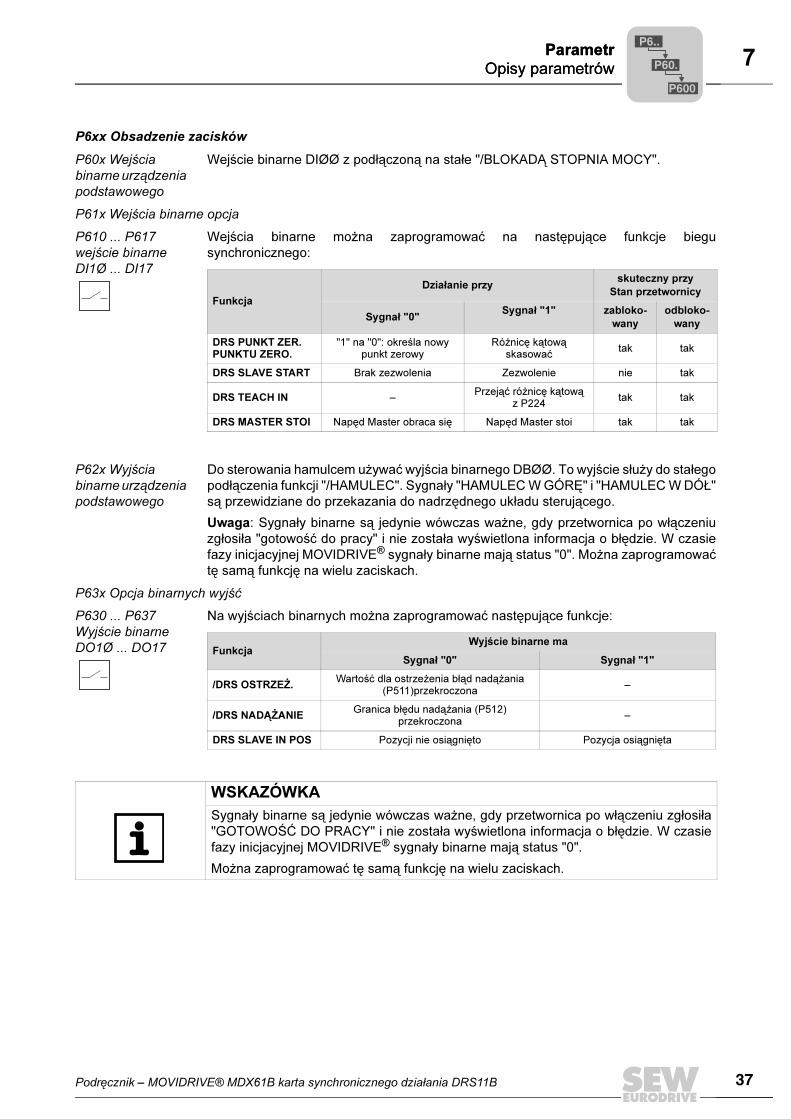
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 37
7Opisy parametrów
Parametr
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 37
7Opisy parametrów
Parametr
P6xx Obsadzenie zacisków
P60x Wejścia binarne urządzenia podstawowego
Wejście binarne DIØØ z podłączoną na stałe "/BLOKADĄ STOPNIA MOCY".
P61x Wejścia binarne opcja
P610 ... P617 wejście binarne DI1Ø ... DI17
Wejścia binarne można zaprogramować na następujące funkcje biegusynchronicznego:
P62x Wyjścia binarne urządzenia podstawowego
Do sterowania hamulcem używać wyjścia binarnego DBØØ. To wyjście służy do stałegopodłączenia funkcji "/HAMULEC". Sygnały "HAMULEC W GÓRĘ" i "HAMULEC W DÓŁ"są przewidziane do przekazania do nadrzędnego układu sterującego.
Uwaga: Sygnały binarne są jedynie wówczas ważne, gdy przetwornica po włączeniuzgłosiła "gotowość do pracy" i nie została wyświetlona informacja o błędzie. W czasiefazy inicjacyjnej MOVIDRIVE® sygnały binarne mają status "0". Można zaprogramowaćtę samą funkcję na wielu zaciskach.
P63x Opcja binarnych wyjść
P630 ... P637 Wyjście binarne DO1Ø ... DO17
Na wyjściach binarnych można zaprogramować następujące funkcje:
Funkcja
Działanie przyskuteczny przy
Stan przetwornicy
Sygnał "0"Sygnał "1" zabloko-
wanyodbloko-
wany
DRS PUNKT ZER. PUNKTU ZERO.
"1" na "0": określa nowy punkt zerowy
Różnicę kątową skasować
tak tak
DRS SLAVE START Brak zezwolenia Zezwolenie nie tak
DRS TEACH IN –Przejąć różnicę kątową
z P224tak tak
DRS MASTER STOI Napęd Master obraca się Napęd Master stoi tak tak
FunkcjaWyjście binarne ma
Sygnał "0" Sygnał "1"
/DRS OSTRZEŻ. Wartość dla ostrzeżenia błąd nadążania (P511)przekroczona
–
/DRS NADĄŻANIE Granica błędu nadążania (P512) przekroczona
–
DRS SLAVE IN POS Pozycji nie osiągnięto Pozycja osiągnięta
WSKAZÓWKASygnały binarne są jedynie wówczas ważne, gdy przetwornica po włączeniu zgłosiła"GOTOWOŚĆ DO PRACY" i nie została wyświetlona informacja o błędzie. W czasiefazy inicjacyjnej MOVIDRIVE® sygnały binarne mają status "0".
Można zaprogramować tę samą funkcję na wielu zaciskach.
P6..
P60.
P600
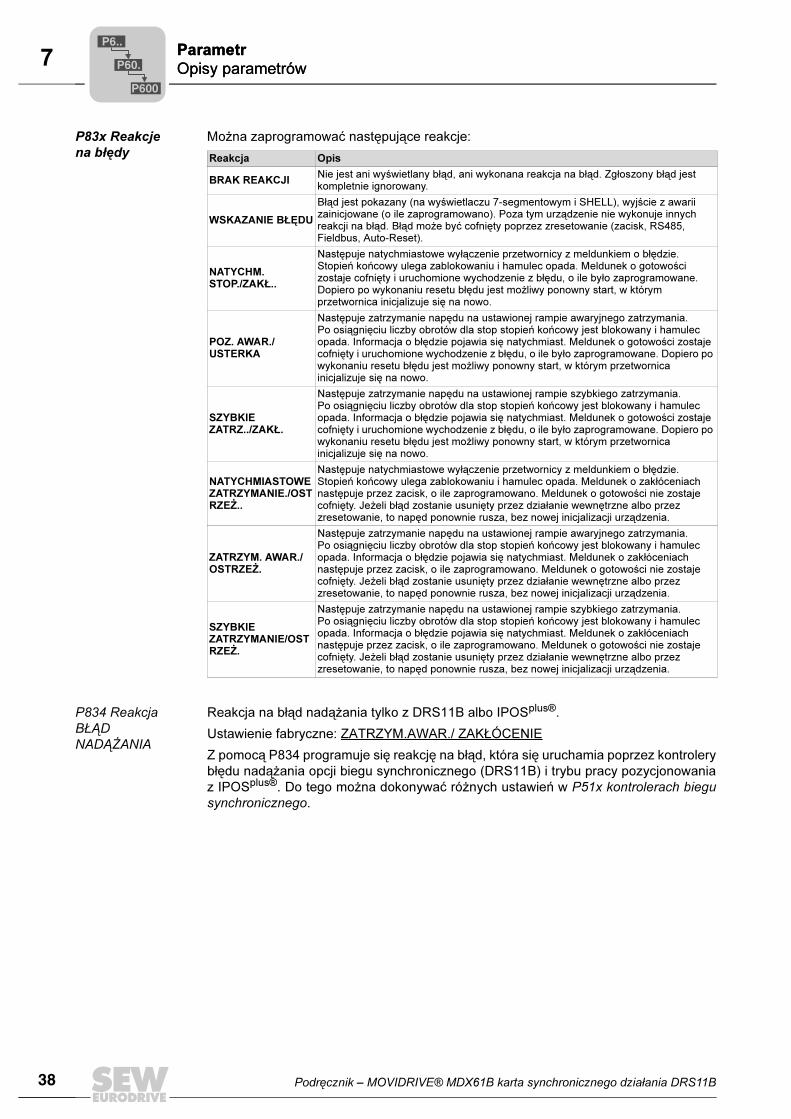
7
38 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Opisy parametrów
Parametr
38 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
7Opisy parametrów
Parametr
P83x Reakcje
na błędy
Można zaprogramować następujące reakcje:
P834 Reakcja BŁĄD NADĄŻANIA
Reakcja na błąd nadążania tylko z DRS11B albo IPOSplus®.
Ustawienie fabryczne: ZATRZYM.AWAR./ ZAKŁÓCENIE
Z pomocą P834 programuje się reakcję na błąd, która się uruchamia poprzez kontrolerybłędu nadążania opcji biegu synchronicznego (DRS11B) i trybu pracy pozycjonowaniaz IPOSplus®. Do tego można dokonywać różnych ustawień w P51x kontrolerach biegusynchronicznego.
Reakcja Opis
BRAK REAKCJI Nie jest ani wyświetlany błąd, ani wykonana reakcja na błąd. Zgłoszony błąd jest kompletnie ignorowany.
WSKAZANIE BŁĘDU
Błąd jest pokazany (na wyświetlaczu 7-segmentowym i SHELL), wyjście z awarii zainicjowane (o ile zaprogramowano). Poza tym urządzenie nie wykonuje innych reakcji na błąd. Błąd może być cofnięty poprzez zresetowanie (zacisk, RS485, Fieldbus, Auto-Reset).
NATYCHM. STOP./ZAKŁ..
Następuje natychmiastowe wyłączenie przetwornicy z meldunkiem o błędzie. Stopień końcowy ulega zablokowaniu i hamulec opada. Meldunek o gotowości zostaje cofnięty i uruchomione wychodzenie z błędu, o ile było zaprogramowane. Dopiero po wykonaniu resetu błędu jest możliwy ponowny start, w którym przetwornica inicjalizuje się na nowo.
POZ. AWAR./USTERKA
Następuje zatrzymanie napędu na ustawionej rampie awaryjnego zatrzymania. Po osiągnięciu liczby obrotów dla stop stopień końcowy jest blokowany i hamulec opada. Informacja o błędzie pojawia się natychmiast. Meldunek o gotowości zostaje cofnięty i uruchomione wychodzenie z błędu, o ile było zaprogramowane. Dopiero po wykonaniu resetu błędu jest możliwy ponowny start, w którym przetwornica inicjalizuje się na nowo.
SZYBKIE ZATRZ../ZAKŁ.
Następuje zatrzymanie napędu na ustawionej rampie szybkiego zatrzymania. Po osiągnięciu liczby obrotów dla stop stopień końcowy jest blokowany i hamulec opada. Informacja o błędzie pojawia się natychmiast. Meldunek o gotowości zostaje cofnięty i uruchomione wychodzenie z błędu, o ile było zaprogramowane. Dopiero po wykonaniu resetu błędu jest możliwy ponowny start, w którym przetwornica inicjalizuje się na nowo.
NATYCHMIASTOWE ZATRZYMANIE./OSTRZEŻ..
Następuje natychmiastowe wyłączenie przetwornicy z meldunkiem o błędzie. Stopień końcowy ulega zablokowaniu i hamulec opada. Meldunek o zakłóceniach następuje przez zacisk, o ile zaprogramowano. Meldunek o gotowości nie zostaje cofnięty. Jeżeli błąd zostanie usunięty przez działanie wewnętrzne albo przez zresetowanie, to napęd ponownie rusza, bez nowej inicjalizacji urządzenia.
ZATRZYM. AWAR./OSTRZEŻ.
Następuje zatrzymanie napędu na ustawionej rampie awaryjnego zatrzymania. Po osiągnięciu liczby obrotów dla stop stopień końcowy jest blokowany i hamulec opada. Informacja o błędzie pojawia się natychmiast. Meldunek o zakłóceniach następuje przez zacisk, o ile zaprogramowano. Meldunek o gotowości nie zostaje cofnięty. Jeżeli błąd zostanie usunięty przez działanie wewnętrzne albo przez zresetowanie, to napęd ponownie rusza, bez nowej inicjalizacji urządzenia.
SZYBKIE ZATRZYMANIE/OSTRZEŻ.
Następuje zatrzymanie napędu na ustawionej rampie szybkiego zatrzymania. Po osiągnięciu liczby obrotów dla stop stopień końcowy jest blokowany i hamulec opada. Informacja o błędzie pojawia się natychmiast. Meldunek o zakłóceniach następuje przez zacisk, o ile zaprogramowano. Meldunek o gotowości nie zostaje cofnięty. Jeżeli błąd zostanie usunięty przez działanie wewnętrzne albo przez zresetowanie, to napęd ponownie rusza, bez nowej inicjalizacji urządzenia.
P6..
P60.
P600
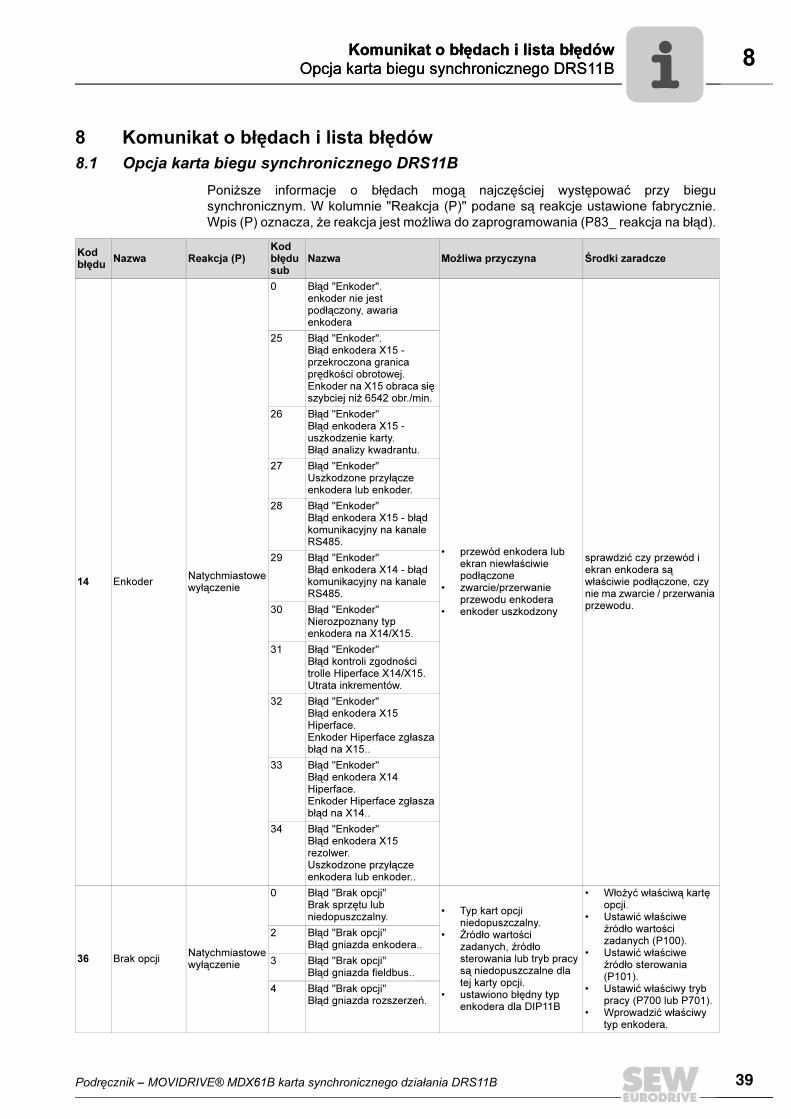
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 39
8Opcja karta biegu synchronicznego DRS11B
Komunikat o błędach i lista błędów
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 39
8Opcja karta biegu synchronicznego DRS11B
Komunikat o błędach i lista błędów
8 Komunikat o błędach i lista błędów
8.1 Opcja karta biegu synchronicznego DRS11B
Poniższe informacje o błędach mogą najczęściej występować przy biegusynchronicznym. W kolumnie "Reakcja (P)" podane są reakcje ustawione fabrycznie.Wpis (P) oznacza, że reakcja jest możliwa do zaprogramowania (P83_ reakcja na błąd).
Kod błędu Nazwa Reakcja (P)
Kod błędu sub
Nazwa Możliwa przyczyna Środki zaradcze
14 EnkoderNatychmiastowe wyłączenie
0 Błąd "Enkoder".enkoder nie jest podłączony, awaria enkodera
• przewód enkodera lub ekran niewłaściwie podłączone
• zwarcie/przerwanie przewodu enkodera
• enkoder uszkodzony
sprawdzić czy przewód i ekran enkodera są właściwie podłączone, czy nie ma zwarcie / przerwania przewodu.
25 Błąd "Enkoder".Błąd enkodera X15 - przekroczona granica prędkości obrotowej.Enkoder na X15 obraca się szybciej niż 6542 obr./min.
26 Błąd "Enkoder"Błąd enkodera X15 - uszkodzenie karty.Błąd analizy kwadrantu.
27 Błąd "Enkoder"Uszkodzone przyłącze enkodera lub enkoder.
28 Błąd "Enkoder"Błąd enkodera X15 - błąd komunikacyjny na kanale RS485.
29 Błąd "Enkoder"Błąd enkodera X14 - błąd komunikacyjny na kanale RS485.
30 Błąd "Enkoder"Nierozpoznany typ enkodera na X14/X15.
31 Błąd "Enkoder"Błąd kontroli zgodności trolle Hiperface X14/X15.Utrata inkrementów.
32 Błąd "Enkoder"Błąd enkodera X15 Hiperface.Enkoder Hiperface zgłasza błąd na X15..
33 Błąd "Enkoder"Błąd enkodera X14 Hiperface.Enkoder Hiperface zgłasza błąd na X14..
34 Błąd "Enkoder"Błąd enkodera X15 rezolwer.Uszkodzone przyłącze enkodera lub enkoder..
36 Brak opcjiNatychmiastowe wyłączenie
0 Błąd "Brak opcji"Brak sprzętu lub niedopuszczalny.
• Typ kart opcji niedopuszczalny.
• Zródło wartości zadanych, źródło sterowania lub tryb pracy są niedopuszczalne dla tej karty opcji.
• ustawiono błędny typ enkodera dla DIP11B
• Włożyć właściwą kartę opcji.
• Ustawić właściwe źródło wartości zadanych (P100).
• Ustawić właściwe źródło sterowania (P101).
• Ustawić właściwy tryb pracy (P700 lub P701).
• Wprowadzić właściwy typ enkodera.
2 Błąd "Brak opcji"Błąd gniazda enkodera..
3 Błąd "Brak opcji"Błąd gniazda fieldbus..
4 Błąd "Brak opcji"Błąd gniazda rozszerzeń.
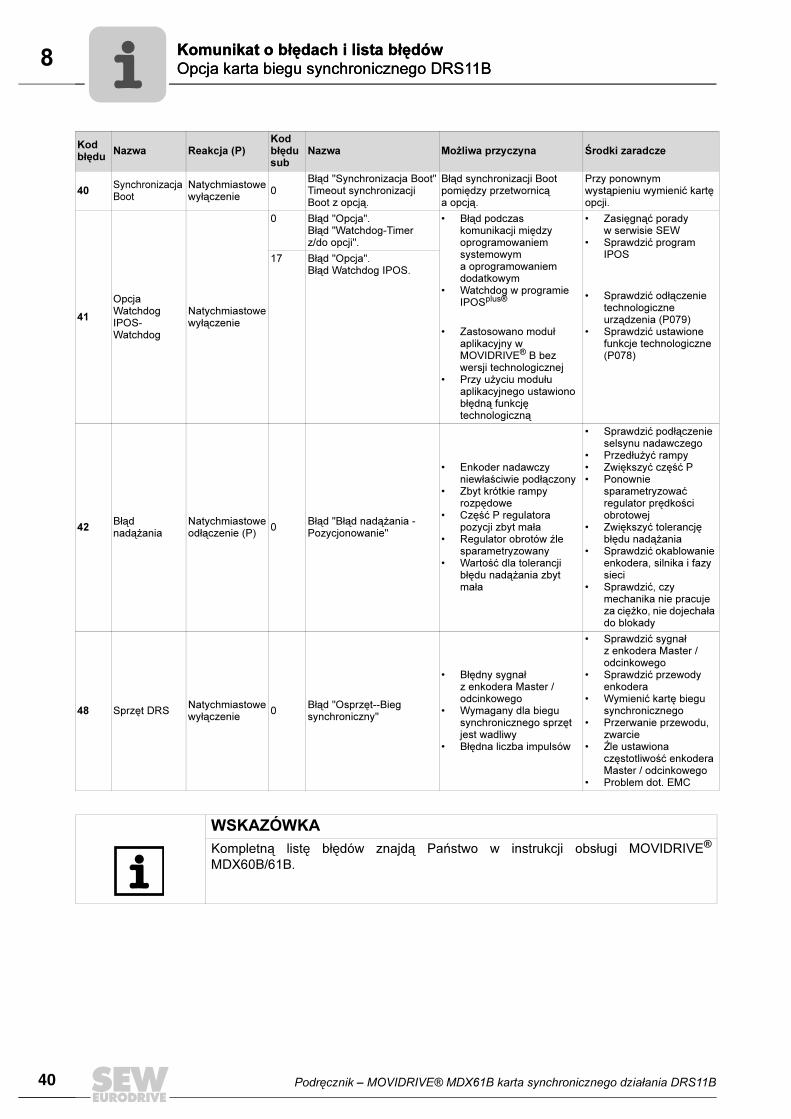
8
40 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Opcja karta biegu synchronicznego DRS11B
Komunikat o błędach i lista błędów
40 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
8Opcja karta biegu synchronicznego DRS11B
Komunikat o błędach i lista błędów
40 Synchronizacja Boot
Natychmiastowe wyłączenie
0Błąd "Synchronizacja Boot"Timeout synchronizacji Boot z opcją.
Błąd synchronizacji Boot pomiędzy przetwornicą a opcją.
Przy ponownym wystąpieniu wymienić kartę opcji.
41
Opcja WatchdogIPOS-Watchdog
Natychmiastowe wyłączenie
0 Błąd "Opcja".Błąd "Watchdog-Timer z/do opcji".
• Błąd podczas komunikacji między oprogramowaniem systemowym a oprogramowaniem dodatkowym
• Watchdog w programie IPOSplus®
• Zastosowano moduł aplikacyjny w MOVIDRIVE® B bez wersji technologicznej
• Przy użyciu modułu aplikacyjnego ustawiono błędną funkcję technologiczną
• Zasięgnąć porady w serwisie SEW
• Sprawdzić program IPOS
• Sprawdzić odłączenie technologiczne urządzenia (P079)
• Sprawdzić ustawione funkcje technologiczne (P078)
17 Błąd "Opcja".Błąd Watchdog IPOS.
42 Błąd nadążania
Natychmiastowe odłączenie (P)
0Błąd "Błąd nadążania -Pozycjonowanie"
• Enkoder nadawczy niewłaściwie podłączony
• Zbyt krótkie rampy rozpędowe
• Część P regulatora pozycji zbyt mała
• Regulator obrotów źle sparametryzowany
• Wartość dla tolerancji błędu nadążania zbyt mała
• Sprawdzić podłączenie selsynu nadawczego
• Przedłużyć rampy• Zwiększyć część P• Ponownie
sparametryzować regulator prędkości obrotowej
• Zwiększyć tolerancję błędu nadążania
• Sprawdzić okablowanie enkodera, silnika i fazy sieci
• Sprawdzić, czy mechanika nie pracuje za ciężko, nie dojechała do blokady
48 Sprzęt DRSNatychmiastowe wyłączenie
0Błąd "Osprzęt--Bieg synchroniczny"
• Błędny sygnał z enkodera Master / odcinkowego
• Wymagany dla biegu synchronicznego sprzęt jest wadliwy
• Błędna liczba impulsów
• Sprawdzić sygnał z enkodera Master / odcinkowego
• Sprawdzić przewody enkodera
• Wymienić kartę biegu synchronicznego
• Przerwanie przewodu, zwarcie
• Zle ustawiona częstotliwość enkodera Master / odcinkowego
• Problem dot. EMC
Kod błędu Nazwa Reakcja (P)
Kod błędu sub
Nazwa Możliwa przyczyna Środki zaradcze
WSKAZÓWKAKompletną listę błędów znajdą Państwo w instrukcji obsługi MOVIDRIVE®
MDX60B/61B.
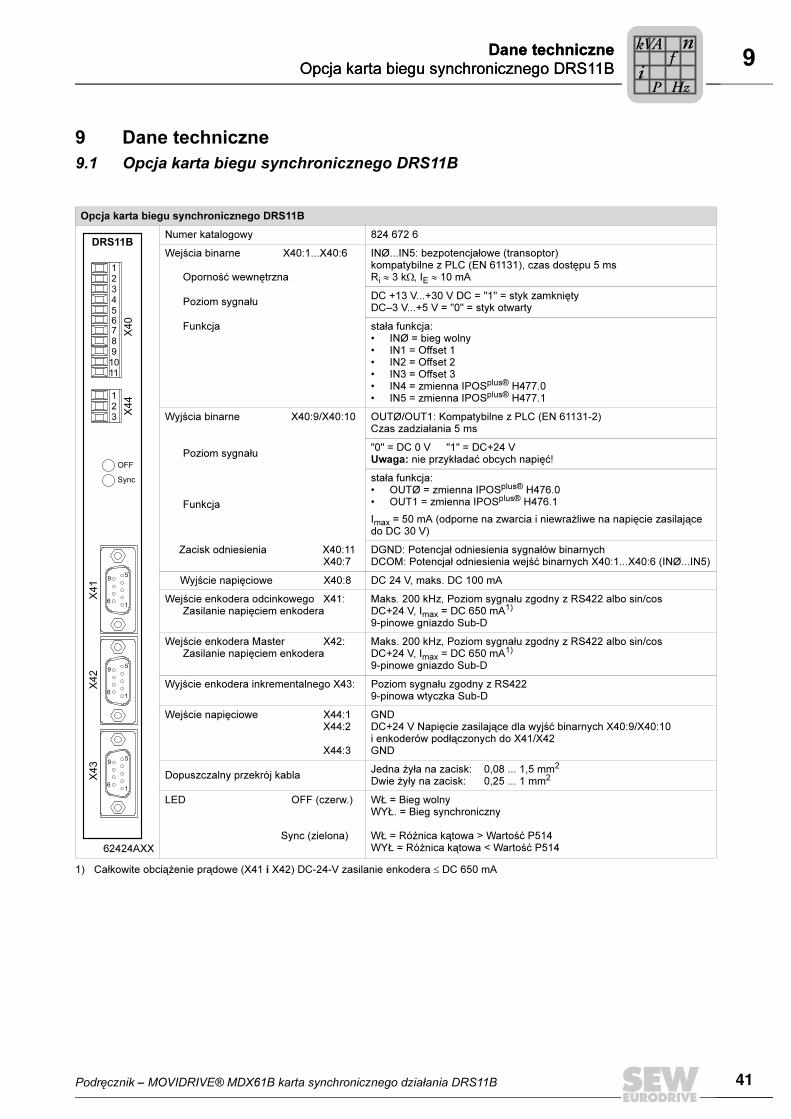
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 41
9Opcja karta biegu synchronicznego DRS11B
Dane techniczne
Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B 41
9Opcja karta biegu synchronicznego DRS11B
Dane techniczne
9 Dane techniczne
9.1 Opcja karta biegu synchronicznego DRS11B
Opcja karta biegu synchronicznego DRS11B
62424AXX
Numer katalogowy 824 672 6
Wejścia binarne X40:1...X40:6
Oporność wewnętrzna
INØ...IN5: bezpotencjałowe (transoptor)kompatybilne z PLC (EN 61131), czas dostępu 5 msRi ≈ 3 kΩ, IE ≈ 10 mA
Poziom sygnałuDC +13 V...+30 V DC = "1" = styk zamkniętyDC–3 V...+5 V = "0" = styk otwarty
Funkcja stała funkcja:• INØ = bieg wolny• IN1 = Offset 1• IN2 = Offset 2• IN3 = Offset 3• IN4 = zmienna IPOSplus® H477.0• IN5 = zmienna IPOSplus® H477.1
Wyjścia binarne X40:9/X40:10 OUTØ/OUT1: Kompatybilne z PLC (EN 61131-2)Czas zadziałania 5 ms
Poziom sygnału"0" = DC 0 V "1" = DC+24 VUwaga: nie przykładać obcych napięć!
Funkcja
stała funkcja:• OUTØ = zmienna IPOSplus® H476.0• OUT1 = zmienna IPOSplus® H476.1
Imax = 50 mA (odporne na zwarcia i niewrażliwe na napięcie zasilające do DC 30 V)
Zacisk odniesienia X40:11X40:7
DGND: Potencjał odniesienia sygnałów binarnychDCOM: Potencjał odniesienia wejść binarnych X40:1...X40:6 (INØ...IN5)
Wyjście napięciowe X40:8 DC 24 V, maks. DC 100 mA
Wejście enkodera odcinkowego X41: Zasilanie napięciem enkodera
Maks. 200 kHz, Poziom sygnału zgodny z RS422 albo sin/cosDC+24 V, Imax = DC 650 mA1)
9-pinowe gniazdo Sub-D
Wejście enkodera Master X42: Zasilanie napięciem enkodera
Maks. 200 kHz, Poziom sygnału zgodny z RS422 albo sin/cosDC+24 V, Imax = DC 650 mA1)
9-pinowe gniazdo Sub-D
Wyjście enkodera inkrementalnego X43: Poziom sygnału zgodny z RS4229-pinowa wtyczka Sub-D
Wejście napięciowe X44:1X44:2
X44:3
GNDDC+24 V Napięcie zasilające dla wyjść binarnych X40:9/X40:10 i enkoderów podłączonych do X41/X42GND
Dopuszczalny przekrój kablaJedna żyła na zacisk: 0,08 ... 1,5 mm2
Dwie żyły na zacisk: 0,25 ... 1 mm2
LED OFF (czerw.)
Sync (zielona)
WŁ = Bieg wolnyWYŁ. = Bieg synchroniczny
WŁ = Różnica kątowa > Wartość P514WYŁ = Różnica kątowa < Wartość P514
1) Całkowite obciążenie prądowe (X41 i X42) DC-24-V zasilanie enkodera ≤ DC 650 mA
DRS11B
X40
X44
X41
X42
X43
OFF
Sync
5
1
9
6
5
1
9
6
5
1
9
6
123456789
1011
123
Pi
fkVA
Hz
n
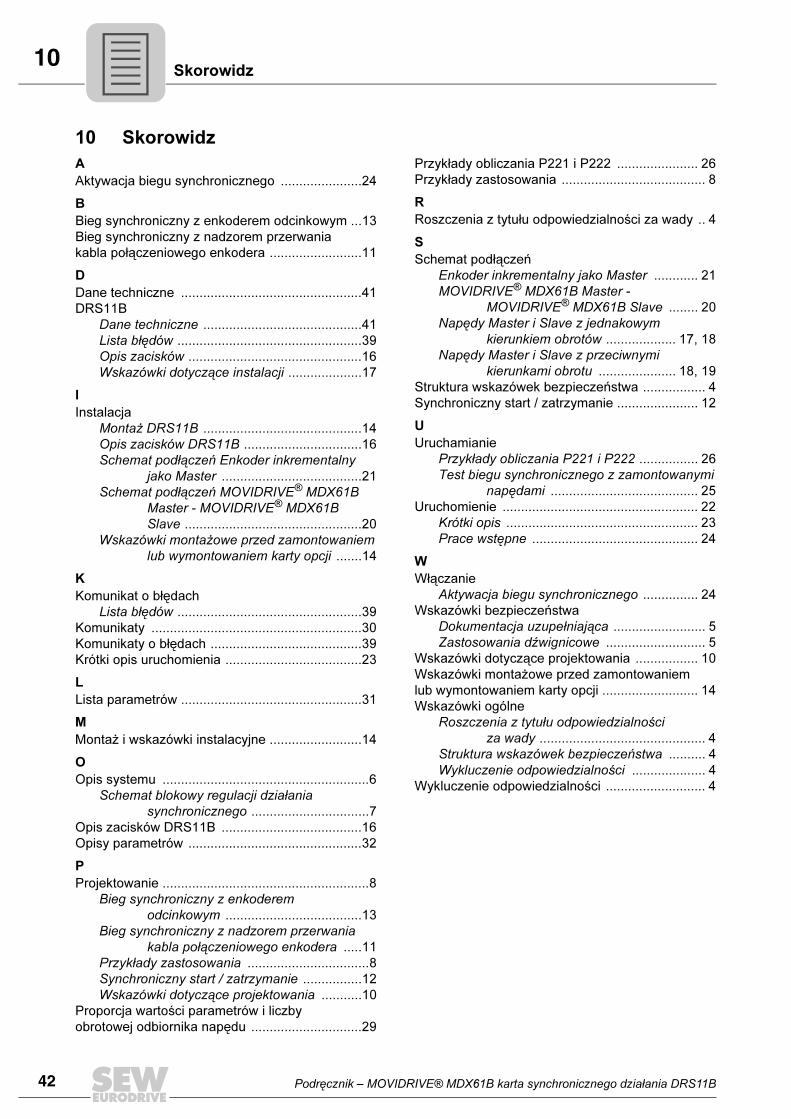
10
42 Podręcznik – MOVIDRIVE® MDX61B karta synchronicznego działania DRS11B
Skorowidz
10 Skorowidz
A
Aktywacja biegu synchronicznego ......................24
B
Bieg synchroniczny z enkoderem odcinkowym ...13Bieg synchroniczny z nadzorem przerwania kabla połączeniowego enkodera .........................11
D
Dane techniczne .................................................41DRS11B
Dane techniczne ...........................................41Lista błędów ..................................................39Opis zacisków ...............................................16Wskazówki dotyczące instalacji ....................17
I
InstalacjaMontaż DRS11B ...........................................14Opis zacisków DRS11B ................................16Schemat podłączeń Enkoder inkrementalny
jako Master ......................................21Schemat podłączeń MOVIDRIVE® MDX61B
Master - MOVIDRIVE® MDX61B
Slave ................................................20Wskazówki montażowe przed zamontowaniem
lub wymontowaniem karty opcji .......14
K
Komunikat o błędachLista błędów ..................................................39
Komunikaty .........................................................30Komunikaty o błędach .........................................39Krótki opis uruchomienia .....................................23
L
Lista parametrów .................................................31
M
Montaż i wskazówki instalacyjne .........................14
O
Opis systemu ........................................................6Schemat blokowy regulacji działania
synchronicznego ................................7Opis zacisków DRS11B ......................................16Opisy parametrów ...............................................32
P
Projektowanie ........................................................8Bieg synchroniczny z enkoderem
odcinkowym .....................................13Bieg synchroniczny z nadzorem przerwania
kabla połączeniowego enkodera .....11Przykłady zastosowania .................................8Synchroniczny start / zatrzymanie ................12Wskazówki dotyczące projektowania ...........10
Proporcja wartości parametrów i liczby obrotowej odbiornika napędu ..............................29
Przykłady obliczania P221 i P222 ...................... 26Przykłady zastosowania ....................................... 8
R
Roszczenia z tytułu odpowiedzialności za wady .. 4
S
Schemat podłączeńEnkoder inkrementalny jako Master ............ 21MOVIDRIVE® MDX61B Master -
MOVIDRIVE® MDX61B Slave ........ 20Napędy Master i Slave z jednakowym
kierunkiem obrotów ................... 17, 18Napędy Master i Slave z przeciwnymi
kierunkami obrotu ..................... 18, 19Struktura wskazówek bezpieczeństwa ................. 4Synchroniczny start / zatrzymanie ...................... 12
U
UruchamianiePrzykłady obliczania P221 i P222 ................ 26Test biegu synchronicznego z zamontowanymi
napędami ........................................ 25Uruchomienie ..................................................... 22
Krótki opis .................................................... 23Prace wstępne ............................................. 24
W
WłączanieAktywacja biegu synchronicznego ............... 24
Wskazówki bezpieczeństwaDokumentacja uzupełniająca ......................... 5Zastosowania dźwignicowe ........................... 5
Wskazówki dotyczące projektowania ................. 10Wskazówki montażowe przed zamontowaniem lub wymontowaniem karty opcji .......................... 14Wskazówki ogólne
Roszczenia z tytułu odpowiedzialności
za wady ............................................. 4Struktura wskazówek bezpieczeństwa .......... 4Wykluczenie odpowiedzialności .................... 4
Wykluczenie odpowiedzialności ........................... 4
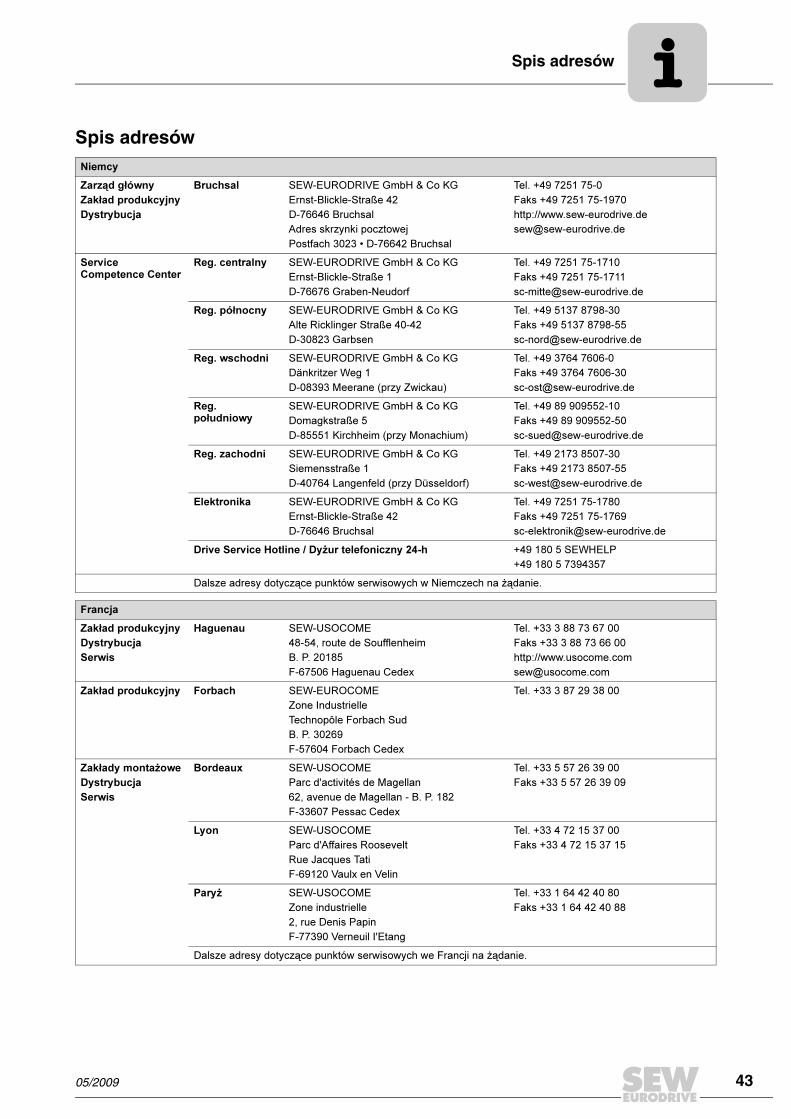
Spis adresów
05/2009 43
Spis adresówNiemcy
Zarząd głównyZakład produkcyjnyDystrybucja
Bruchsal SEW-EURODRIVE GmbH & Co KG
Ernst-Blickle-Straße 42 D-76646 BruchsalAdres skrzynki pocztowej
Postfach 3023 • D-76642 Bruchsal
Tel. +49 7251 75-0
Faks +49 7251 75-1970http://[email protected]
Service Competence Center
Reg. centralny SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 1
D-76676 Graben-Neudorf
Tel. +49 7251 75-1710Faks +49 7251 75-1711
Reg. północny SEW-EURODRIVE GmbH & Co KGAlte Ricklinger Straße 40-42
D-30823 Garbsen
Tel. +49 5137 8798-30Faks +49 5137 8798-55
Reg. wschodni SEW-EURODRIVE GmbH & Co KGDänkritzer Weg 1
D-08393 Meerane (przy Zwickau)
Tel. +49 3764 7606-0Faks +49 3764 7606-30
Reg. południowy
SEW-EURODRIVE GmbH & Co KGDomagkstraße 5
D-85551 Kirchheim (przy Monachium)
Tel. +49 89 909552-10Faks +49 89 909552-50
Reg. zachodni SEW-EURODRIVE GmbH & Co KGSiemensstraße 1
D-40764 Langenfeld (przy Düsseldorf)
Tel. +49 2173 8507-30Faks +49 2173 8507-55
Elektronika SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42
D-76646 Bruchsal
Tel. +49 7251 75-1780Faks +49 7251 75-1769
Drive Service Hotline / Dyżur telefoniczny 24-h +49 180 5 SEWHELP
+49 180 5 7394357
Dalsze adresy dotyczące punktów serwisowych w Niemczech na żądanie.
Francja
Zakład produkcyjnyDystrybucjaSerwis
Haguenau SEW-USOCOME 48-54, route de Soufflenheim B. P. 20185
F-67506 Haguenau Cedex
Tel. +33 3 88 73 67 00 Faks +33 3 88 73 66 00http://www.usocome.com
Zakład produkcyjny Forbach SEW-EUROCOME Zone Industrielle
Technopôle Forbach SudB. P. 30269F-57604 Forbach Cedex
Tel. +33 3 87 29 38 00
Zakłady montażoweDystrybucjaSerwis
Bordeaux SEW-USOCOME Parc d'activités de Magellan62, avenue de Magellan - B. P. 182
F-33607 Pessac Cedex
Tel. +33 5 57 26 39 00Faks +33 5 57 26 39 09
Lyon SEW-USOCOME Parc d'Affaires Roosevelt
Rue Jacques TatiF-69120 Vaulx en Velin
Tel. +33 4 72 15 37 00Faks +33 4 72 15 37 15
Paryż SEW-USOCOME
Zone industrielle 2, rue Denis Papin F-77390 Verneuil I'Etang
Tel. +33 1 64 42 40 80
Faks +33 1 64 42 40 88
Dalsze adresy dotyczące punktów serwisowych we Francji na żądanie.
Spis adresów
44 05/2009
Algieria
Dystrybucja Alger Réducom 16, rue des Frčres Zaghnoun
Bellevue El-Harrach16200 Alger
Tel. +213 21 8222-84Faks +213 21 8222-84
Argentyna
Zakład montażowyDystrybucjaSerwis
Buenos Aires SEW EURODRIVE ARGENTINA S.A.Centro Industrial Garin, Lote 35Ruta Panamericana Km 37,5
1619 Garin
Tel. +54 3327 4572-84Faks +54 3327 [email protected]
Australia
Zakłady montażoweDystrybucjaSerwis
Melbourne SEW-EURODRIVE PTY. LTD.
27 Beverage DriveTullamarine, Victoria 3043
Tel. +61 3 9933-1000
Faks +61 3 9933-1003http://[email protected]
Sydney SEW-EURODRIVE PTY. LTD.9, Sleigh Place, Wetherill Park New South Wales, 2164
Tel. +61 2 9725-9900Faks +61 2 [email protected]
Townsville SEW-EURODRIVE PTY. LTD.12 Leyland StreetGarbutt, QLD 4814
Tel. +61 7 4779 4333Faks +61 7 4779 [email protected]
Austria
Zakład montażowyDystrybucjaSerwis
Wiedeń SEW-EURODRIVE Ges.m.b.H. Richard-Strauss-Strasse 24
A-1230 Wien
Tel. +43 1 617 55 00-0Faks +43 1 617 55 00-30
http://[email protected]
Belgia
Zakład montażowyDystrybucjaSerwis
Bruksela SEW Caron-Vector S.A.Avenue Eiffel 5
B-1300 Wavre
Tel. +32 10 231-311Faks +32 10 231-336
http://[email protected]
Białoruś
Dystrybucja Minsk SEW-EURODRIVE BYRybalkoStr. 26BY-220033 Minsk
Tel.+375 (17) 298 38 50Faks +375 (17) 29838 [email protected]
Brazylia
Zakład produkcyjnyDystrybucjaSerwis
Sao Paulo SEW-EURODRIVE Brasil Ltda.Avenida Amâncio Gaiolli, 50
Caixa Postal: 201-07111-970Guarulhos/SP - Cep.: 07251-250
Tel. +55 11 6489-9133Faks +55 11 6480-3328
http://[email protected]
Dalsze adresy dotyczące punktów serwisowych w Brazylii na żądanie.
Bułgaria
Dystrybucja Sofia BEVER-DRIVE GmbHBogdanovetz Str.1
BG-1606 Sofia
Tel. +359 2 9151160Faks +359 2 9151166
Spis adresów
05/2009 45
Chile
Zakład montażowyDystrybucjaSerwis
Santiago de Chile
SEW-EURODRIVE CHILE LTDA.Las Encinas 1295
Parque Industrial Valle GrandeLAMPARCH-Santiago de Chile
Adres skrzynki pocztowejCasilla 23 Correo Quilicura - Santiago - Chile
Tel. +56 2 75770-00Faks +56 2 75770-01
http://[email protected]
Chiny
Zakład produkcyjnyZakład montażowyDystrybucjaSerwis
Tianjin SEW-EURODRIVE (Tianjin) Co., Ltd.No. 46, 7th Avenue, TEDATianjin 300457
Tel. +86 22 25322612Faks +86 22 [email protected]
http://www.sew-eurodrive.cn
Zakład montażowyDystrybucjaSerwis
Suzhou SEW-EURODRIVE (Suzhou) Co., Ltd.333, Suhong Middle Road
Suzhou Industrial ParkJiangsu Province, 215021P. R. China
Tel. +86 512 62581781Faks +86 512 62581783
Guangzhou SEW-EURODRIVE (Guangzhou) Co., Ltd.No. 9, JunDa RoadEast Section of GETDD
Guangzhou 510530P. R. China
Tel. +86 20 82267890Faks +86 20 [email protected]
Shenyang SEW-EURODRIVE (Shenyang) Co., Ltd.
10A-2, 6th RoadShenyang Economic Technological Development Area
Shenyang, 110141P. R. China
Tel. +86 24 25382538
Faks +86 24 [email protected]
Dalsze adresy dotyczące punktów serwisowych w Chinach na żądanie.
Chorwacja
DystrybucjaSerwis
Zagrzeb KOMPEKS d. o. o.PIT Erdödy 4 II
HR 10 000 Zagreb
Tel. +385 1 4613-158Faks +385 1 4613-158
Dania
Zakład montażowyDystrybucjaSerwis
Kopenhaga SEW-EURODRIVEA/S
Geminivej 28-30DK-2670 Greve
Tel. +45 43 9585-00
Faks +45 43 9585-09http://[email protected]
Egipt
DystrybucjaSerwis
Kair Copam Egypt for Engineering & Agencies
33 EI Hegaz ST, Heliopolis, Cairo
Tel. +20 2 22566-299 + 1 23143088Faks +20 2 22594-757
http://www.copam-egypt.com/ [email protected]
Estonia
Dystrybucja Tallin ALAS-KUUL ASReti tee 4EE-75301 Peetri küla, Rae vald, Harjumaa
Tel. +372 6593230Faks +372 [email protected]
Finlandia
Zakład montażowyDystrybucjaSerwis
Lahti SEW-EURODRIVE OYVesimäentie 4
FIN-15860 Hollola 2
Tel. +358 201 589-300Faks +358 3 780-6211
[email protected]://www.sew-eurodrive.fi
Spis adresów
46 05/2009
Gabun
Dystrybucja Libreville Electro-ServicesB.P. 1889
Libreville
Tel. +241 7340-11Faks +241 7340-12
Grecja
DystrybucjaSerwis
Ateny Christ. Boznos & Son S.A.
12, Mavromichali StreetP.O. Box 80136, GR-18545 Piraeus
Tel. +30 2 1042 251-34
Faks +30 2 1042 251-59http://[email protected]
Hiszpania
Zakład montażowyDystrybucjaSerwis
Bilbao SEW-EURODRIVE ESPAÑA, S.L. Parque Tecnológico, Edificio, 302
E-48170 Zamudio (Vizcaya)
Tel. +34 94 43184-70Faks +34 94 43184-71
http://[email protected]
Holandia
Zakład montażowyDystrybucjaSerwis
Rotterdam VECTOR Aandrijftechniek B.V. Industrieweg 175 NL-3044 AS Rotterdam
Postbus 10085NL-3004 AB Rotterdam
Tel. +31 10 4463-700Faks +31 10 4155-552http://www.vector.nu
Hong Kong
Zakład montażowyDystrybucjaSerwis
Hong Kong SEW-EURODRIVE LTD.Unit No. 801-806, 8th Floor
Hong Leong Industrial ComplexNo. 4, Wang Kwong Road Kowloon, Hong Kong
Tel. +852 2 7960477 + 79604654Faks +852 2 7959129
Indie
Zakład montażowyDystrybucjaSerwis
Baroda SEW-EURODRIVE India Pvt. Ltd.Plot No. 4, Gidc
Por Ramangamdi • Baroda - 391 243Gujarat
Tel. +91 265 2831086Faks +91 265 2831087
http://[email protected]
Irlandia
DystrybucjaSerwis
Dublin Alperton Engineering Ltd. 48 Moyle RoadDublin Industrial Estate
Glasnevin, Dublin 11
Tel. +353 1 830-6277Faks +353 1 [email protected]
Izrael
Dystrybucja Tel-Aviv Liraz Handasa Ltd.
Ahofer Str 34B / 22858858 Holon
Tel. +972 3 5599511
Faks +972 3 [email protected]
Japonia
Zakład montażowyDystrybucjaSerwis
Iwata SEW-EURODRIVE JAPAN CO., LTD 250-1, Shimoman-no,Iwata
Shizuoka 438-0818
Tel. +81 538 373811Faks +81 538 373814http://www.sew-eurodrive.co.jp
Kamerun
Dystrybucja Douala Electro-Services
Rue Drouot AkwaB.P. 2024Douala
Tel. +237 33 431137
Faks +237 33 431137
Spis adresów
05/2009 47
Kanada
Zakłady montażoweDystrybucjaSerwis
Toronto SEW-EURODRIVE CO. OF CANADA LTD. 210 Walker Drive
Bramalea, Ontario L6T3W1
Tel. +1 905 791-1553Faks +1 905 791-2999
http://[email protected]
Vancouver SEW-EURODRIVE CO. OF CANADA LTD.
7188 Honeyman Street Delta. B.C. V4G 1 E2
Tel. +1 604 946-5535
Faks +1 604 [email protected]
Montreal SEW-EURODRIVE CO. OF CANADA LTD.
2555 Rue Leger LaSalle, Quebec H8N 2V9
Tel. +1 514 367-1124
Faks +1 514 [email protected]
Dalsze adresy dotyczące punktów serwisowych w Kanadzie na żądanie.
Kolumbia
Zakład montażowyDystrybucjaSerwis
Bogotá SEW-EURODRIVE COLOMBIA LTDA. Calle 22 No. 132-60
Bodega 6, Manzana BSantafé de Bogotá
Tel. +57 1 54750-50Faks +57 1 54750-44
http://[email protected]
Korea
Zakład montażowyDystrybucjaSerwis
Ansan-City SEW-EURODRIVE KOREA CO., LTD. B 601-4, Banweol Industrial Estate 1048-4, Shingil-Dong
Ansan 425-120
Tel. +82 31 492-8051Faks +82 31 492-8056http://www.sew-korea.co.kr
Busan SEW-EURODRIVE KOREA Co., Ltd.No. 1720 - 11, Songjeong - dong
Gangseo-kuBusan 618-270
Tel. +82 51 832-0204Faks +82 51 832-0230
Liban
Dystrybucja Beirut Gabriel Acar & Fils sarlB. P. 80484
Bourj Hammoud, Beirut
Tel. +961 1 4947-86 +961 1 4982-72
+961 3 2745-39Faks +961 1 4949-71 [email protected]
Litwa
Dystrybucja Alytus UAB IrsevaNaujoji 19
LT-62175 Alytus
Tel. +370 315 79204Faks +370 315 56175
[email protected]://www.sew-eurodrive.lt
Luksemburg
Zakład montażowyDystrybucjaSerwis
Bruksela CARON-VECTOR S.A.Avenue Eiffel 5B-1300 Wavre
Tel. +32 10 231-311Faks +32 10 231-336http://www.sew-eurodrive.lu
Łotwa
Dystrybucja Riga SIA Alas-Kuul
Katlakalna 11CLV-1073 Riga
Tel. +371 7139253
Faks +371 7139386http://[email protected]
Malezja
Zakład montażowyDystrybucjaSerwis
Johore SEW-EURODRIVE SDN BHD No. 95, Jalan Seroja 39, Taman Johor Jaya
81000 Johor Bahru, JohorWest Malaysia
Tel. +60 7 3549409Faks +60 7 3541404
Spis adresów
48 05/2009
Maroko
Dystrybucja Casablanca Afit5, rue Emir Abdelkader
MA 20300 Casablanca
Tel. +212 22618372Faks +212 22618351
Meksyk
Zakład montażowyDystrybucjaSerwis
Queretaro SEW-EURODRIVE MEXIKO SA DE CV
SEM-981118-M93Tequisquiapan No. 102Parque Industrial Queretaro
C.P. 76220Queretaro, Mexico
Tel. +52 442 1030-300
Faks +52 442 1030-301http://[email protected]
Norwegia
Zakład montażowyDystrybucjaSerwis
Moss SEW-EURODRIVE A/SSolgaard skog 71N-1599 Moss
Tel. +47 69 241-020Faks +47 69 241-040http://www.sew-eurodrive.no
Nowa Zelandia
Zakłady montażoweDystrybucjaSerwis
Auckland SEW-EURODRIVE NEW ZEALAND LTD.
P.O. Box 58-428 82 Greenmount driveEast Tamaki Auckland
Tel. +64 9 2745627
Faks +64 9 2740165http://[email protected]
Christchurch SEW-EURODRIVE NEW ZEALAND LTD. 10 Settlers Crescent, FerrymeadChristchurch
Tel. +64 3 384-6251Faks +64 3 [email protected]
Peru
Zakład montażowyDystrybucjaSerwis
Lima SEW DEL PERU MOTORES REDUCTORES S.A.C.
Los Calderos, 120-124Urbanizacion Industrial Vulcano, ATE, Lima
Tel. +51 1 3495280
Faks +51 1 3493002http://[email protected]
Polska
Zakład montażowyDystrybucjaSerwis
Łódź SEW-EURODRIVE Polska Sp.z.o.o.ul. Techniczna 5
PL-92-518 Łódź
Tel. +48 42 67710-90Faks +48 42 67710-99
http://[email protected]
Portugalia
Zakład montażowyDystrybucjaSerwis
Coimbra SEW-EURODRIVE, LDA. Apartado 15 P-3050-901 Mealhada
Tel. +351 231 20 9670Faks +351 231 20 3685http://www.sew-eurodrive.pt
Republika Czeska
Dystrybucja Praga SEW-EURODRIVE CZ S.R.O.
Business Centrum Praha Lužná 591CZ-16000 Praha 6 - Vokovice
Tel. +420 220121234
Faks +420 220121237http://[email protected]
Rosja
Zakład montażowyDystrybucjaSerwis
St. Petersburg ZAO SEW-EURODRIVE P.O. Box 36
195220 St. Petersburg Russia
Tel. +7 812 3332522 +7 812 5357142Faks +7 812 3332523
http://[email protected]
Spis adresów
05/2009 49
RPA
Zakłady montażoweDystrybucjaSerwis
Johannesburg SEW-EURODRIVE (PROPRIETARY) LIMITEDEurodrive House
Cnr. Adcock Ingram and Aerodrome RoadsAeroton Ext. 2Johannesburg 2013
P.O.Box 90004Bertsham 2013
Tel. +27 11 248-7000Faks +27 11 494-3104
http://[email protected]
Capetown SEW-EURODRIVE (PROPRIETARY) LIMITED
Rainbow ParkCnr. Racecourse & Omuramba RoadMontague Gardens
Cape TownP.O.Box 36556Chempet 7442
Cape Town
Tel. +27 21 552-9820
Faks +27 21 552-9830Telex 576 [email protected]
Durban SEW-EURODRIVE (PROPRIETARY) LIMITED2 Monaceo Place
PinetownDurbanP.O. Box 10433, Ashwood 3605
Tel. +27 31 700-3451Faks +27 31 700-3847
Rumunia
DystrybucjaSerwis
Bukareszt Sialco Trading SRL str. Madrid nr.4
011785 Bucuresti
Tel. +40 21 230-1328Faks +40 21 230-7170
Senegal
Dystrybucja Dakar SENEMECA Mécanique GénéraleKm 8, Route de Rufisque
B.P. 3251, Dakar
Tel. +221 849 47-70Faks +221 849 [email protected]
Serbia
Dystrybucja Beograd DIPAR d.o.o.
Ustanicka 128aPC Košum, IV floorSCG-11000 Beograd
Tel. +381 11 347 3244 / +381 11 288 0393
Faks +381 11 347 [email protected]
Singapur
Zakład montażowyDystrybucjaSerwis
Singapore SEW-EURODRIVE PTE. LTD. No 9, Tuas Drive 2
Jurong Industrial Estate Singapore 638644
Tel. +65 68621701Faks +65 68612827
http://[email protected]
Słowacja
Dystrybucja Bratysława SEW-Eurodrive SK s.r.o.Rybničná 40SK-83554 Bratislava
Tel. +421 2 49595201Faks +421 2 [email protected]
http://sk.sew-eurodrive.com
Žilina SEW-Eurodrive SK s.r.o.ul. Vojtecha Spanyola 33
SK-010 01 Žilina
Tel. +421 41 700 2513Faks +421 41 700 2514
Banská Bystrica SEW-Eurodrive SK s.r.o.Rudlovská cesta 85
SK-97411 Banská Bystrica
Tel. +421 48 414 6564Faks +421 48 414 6566
Spis adresów
50 05/2009
Słowenia
DystrybucjaSerwis
Celje Pakman - Pogonska Tehnika d.o.o.UI. XIV. divizije 14
SLO - 3000 Celje
Tel. +386 3 490 83-20Faks +386 3 490 83-21
Szwajcaria
Zakład montażowyDystrybucjaSerwis
Basel Alfred lmhof A.G.
Jurastrasse 10 CH-4142 Münchenstein bei Basel
Tel. +41 61 417 1717
Faks +41 61 417 1700http://[email protected]
Szwecja
Zakład montażowyDystrybucjaSerwis
Jönköping SEW-EURODRIVE ABGnejsvägen 6-8
S-55303 JönköpingBox 3100 S-55003 Jönköping
Tel. +46 36 3442-00Faks +46 36 3442-80
http://[email protected]
Tajlandia
Zakład montażowyDystrybucjaSerwis
Chonburi SEW-EURODRIVE (Thailand) Ltd.700/456, Moo.7, DonhuarohMuang
Chonburi 20000
Tel. +66 38 454281Faks +66 38 [email protected]
Tunezja
Dystrybucja Tunis T. M.S. Technic Marketing Service
5, Rue El Houdaibiah 1000 Tunis
Tel. +216 71 4340-64 + 71 4320-29
Faks +216 71 [email protected]
Turcja
Zakład montażowyDystrybucjaSerwis
Stambuł SEW-EURODRIVE Hareket Sistemleri San. ve Tic. Ltd. Sti.
Bagdat Cad. Koruma Cikmazi No. 3 TR-34846 Maltepe ISTANBUL
Tel. +90 216 4419163 / 164 3838014/15Faks +90 216 3055867
http://[email protected]
Ukraina
DystrybucjaSerwis
Dnepropetrovsk SEW-EURODRIVEStr. Rabochaja 23-B, Office 40949008 Dnepropetrovsk
Tel. +380 56 370 3211Faks +380 56 372 2078http://www.sew-eurodrive.ua
USA
Zakład produkcyjnyZakład montażowyDystrybucjaSerwis
Greenville SEW-EURODRIVE INC.
1295 Old Spartanburg Highway P.O. Box 518Lyman, S.C. 29365
Tel. +1 864 439-7537
Faks Sales +1 864 439-7830Faks Manuf. +1 864 439-9948Faks Ass. +1 864 439-0566
Telex 805 550 http://[email protected]
Zakłady montażoweDystrybucjaSerwis
San Francisco SEW-EURODRIVE INC. 30599 San Antonio St.Hayward, California 94544-7101
Tel. +1 510 487-3560Faks +1 510 [email protected]
Philadelphia/PA SEW-EURODRIVE INC. Pureland Ind. Complex 2107 High Hill Road, P.O. Box 481
Bridgeport, New Jersey 08014
Tel. +1 856 467-2277Faks +1 856 [email protected]
Dayton SEW-EURODRIVE INC.2001 West Main Street
Troy, Ohio 45373
Tel. +1 937 335-0036Faks +1 937 440-3799
Spis adresów
05/2009 51
Dallas SEW-EURODRIVE INC.3950 Platinum Way
Dallas, Texas 75237
Tel. +1 214 330-4824Faks +1 214 330-4724
Dalsze adresy dotyczące punktów serwisowych w USA na żądanie.
Wenezuela
Zakład montażowyDystrybucjaSerwis
Valencia SEW-EURODRIVE Venezuela S.A.Av. Norte Sur No. 3, Galpon 84-319Zona Industrial Municipal Norte
Valencia, Estado Carabobo
Tel. +58 241 832-9804Faks +58 241 838-6275http://www.sew-eurodrive.com.ve
[email protected]@cantv.net
Węgry
DystrybucjaSerwis
Budapeszt SEW-EURODRIVE Kft.H-1037 BudapestKunigunda u. 18
Tel. +36 1 437 06-58Faks +36 1 437 [email protected]
Wielka Brytania
Zakład montażowyDystrybucjaSerwis
Normanton SEW-EURODRIVE Ltd.Beckbridge Industrial Estate
P.O. Box No.1GB-Normanton, West- Yorkshire WF6 1QR
Tel. +44 1924 893-855Faks +44 1924 893-702
http://[email protected]
Włochy
Zakład montażowyDystrybucjaSerwis
Milano SEW-EURODRIVE di R. Blickle & Co.s.a.s.Via Bernini,14
I-20020 Solaro (Milano)
Tel. +39 02 96 9801Faks +39 02 96 799781
http://[email protected]
Wybrzeże Kości Słoniowej
Dystrybucja Abidjan SICASte industrielle et commerciale pour l'Afrique165, Bld de Marseille
B.P. 2323, Abidjan 08
Tel. +225 2579-44Faks +225 2584-36
USA
Oto jak napędzamy świat
Globalna prezencja –
szybkie, przekonujące
rozwiązania.
W każdym miejscu.
Innowacyjne
pomysły,
umożliwiające
rozwiązanie
przyszłych
problemów już dziś.
Oferta internetowa
przez 24 godziny
na dobę, dająca
dostęp do informacji
i uaktualnień
oprogramowania.
Motoreduktory \ Przekładnie przemysłowe \ Elektronika napędowa \ Automatyka napędowa \ Serwisy
SEW-EURODRIVE
Driving the world
SEW-EURODRIVE GmbH & Co KG
P.O. Box 3023 · D-76642 Bruchsal / Germany
Phone +49 7251 75-0 · Fax +49 7251 75-1970
→ www.sew-eurodrive.com
Ludzie myślący
szybko, opracowujący
razem z Tobą
przyszłościowe
rozwiązania.
Sieć serwisowa,
która jest zawsze
w zasięgu ręki –
na całym świecie.
Napędy i urządzenia
sterujące,
automatycznie
zwiększające
wydajność pracy.
Rozległa wiedza
o najważniejszych
gałęziach dzisiejszego
przemysłu.
Bezkompromisowa
jakość, której
wysokie standardy
ułatwiają codzienną
pracę.