Rozpoznawanie obrazów w identyfikacji typów rud i ich właściwości ...
description
1
Rozpoznawanie obrazów
2
Proces przetwarzania w systemie wizyjnym może być podzielony na trzy części:
• Uzyskanie cyfrowej reprezentacji obrazu (recepcja, akwizycja);
• Przetworzenie obrazu cyfrowego z wykorzystaniem technik komputerowych;
• Analiza i przetworzenie rezultatów w celu sterowania robotami, kontroli automatycznych procesów, kontroli jakości, itp.
3
Główne funkcje systemu wizyjnego to: • Kontrola (określenie pozycji i ewentualne wygenerowanie
komend do robota w celu wykonania pewnych czynności. Np. wybranie obszaru do malowania przez robota, kontrola elementów, itp. );
• Badanie (określenie parametrów elementów, np. kształtu, jakości powierzchni, ilości otworów );
• Wprowadzanie danych (informacje o jakości produktów, materiałów mogą być umieszczone w bazie danych. W tym czasie te dane mogą być sprawdzone w procesie inspekcji.).
4
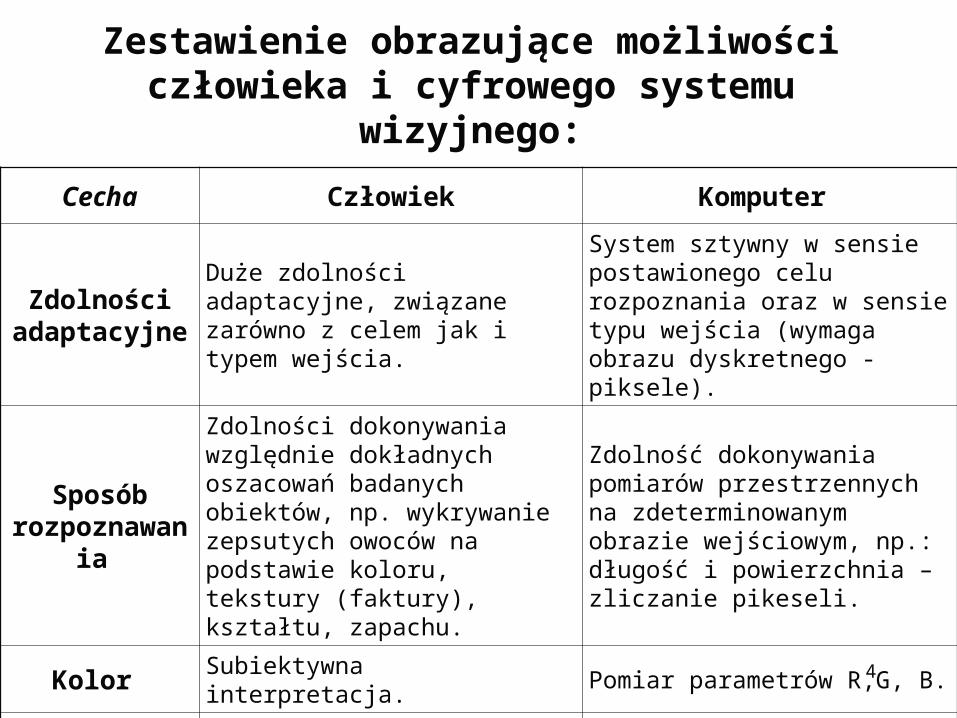
Zestawienie obrazujące możliwości człowieka i cyfrowego systemu wizyjnego:
Cecha Człowiek Komputer
Zdolnościadaptacyjne
Duże zdolności adaptacyjne, związane zarówno z celem jak i typem wejścia.
System sztywny w sensie postawionego celu rozpoznania oraz w sensie typu wejścia (wymaga obrazu dyskretnego - piksele).
Sposóbrozpoznawania
Zdolności dokonywania względnie dokładnych oszacowań badanych obiektów, np. wykrywanie zepsutych owoców na podstawie koloru, tekstury (faktury), kształtu, zapachu.
Zdolność dokonywania pomiarów przestrzennych na zdeterminowanym obrazie wejściowym, np.: długość i powierzchnia – zliczanie pikeseli.
Kolor Subiektywna interpretacja. Pomiar parametrów R,G, B.
Czułość Ograniczona zdolność identyfikacji poziomów szarości (~7 - 10).
Zależna od rodzaju układu pozyskiwania obrazu.
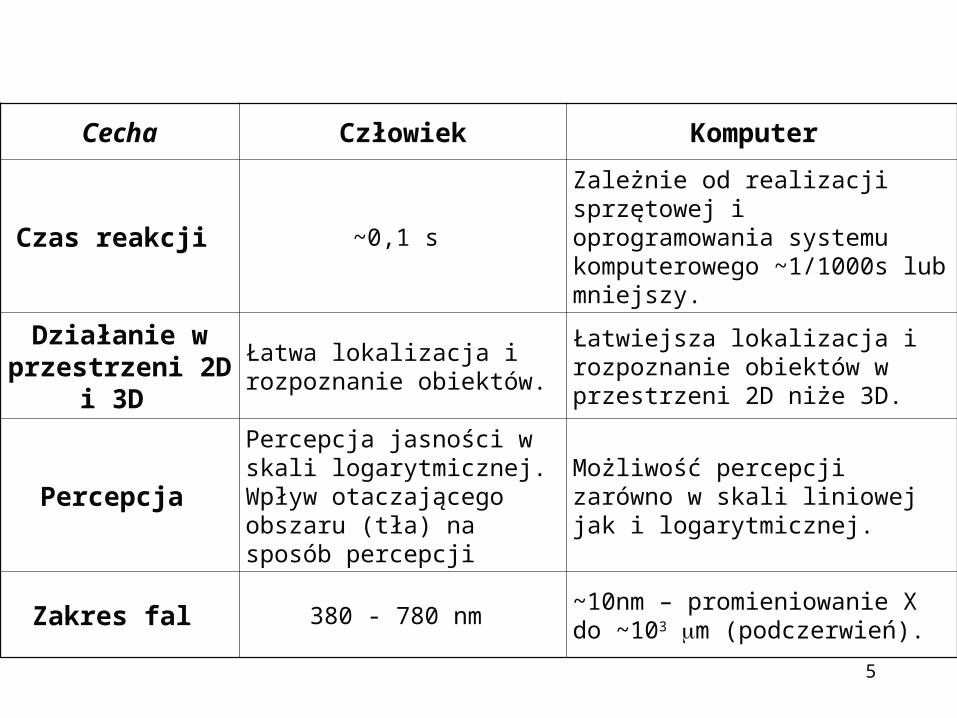
5
Cecha Człowiek Komputer
Czas reakcji ~0,1 s
Zależnie od realizacji sprzętowej i oprogramowania systemu komputerowego ~1/1000s lub mniejszy.
Działanie w przestrzeni 2D i 3D
Łatwa lokalizacja i rozpoznanie obiektów.
Łatwiejsza lokalizacja i rozpoznanie obiektów w przestrzeni 2D niże 3D.
Percepcja
Percepcja jasności w skali logarytmicznej. Wpływ otaczającego obszaru (tła) na sposób percepcji
Możliwość percepcji zarówno w skali liniowej jak i logarytmicznej.
Zakres fal 380 - 780 nm ~10nm – promieniowanie Xdo ~103 m (podczerwień).
6
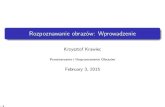
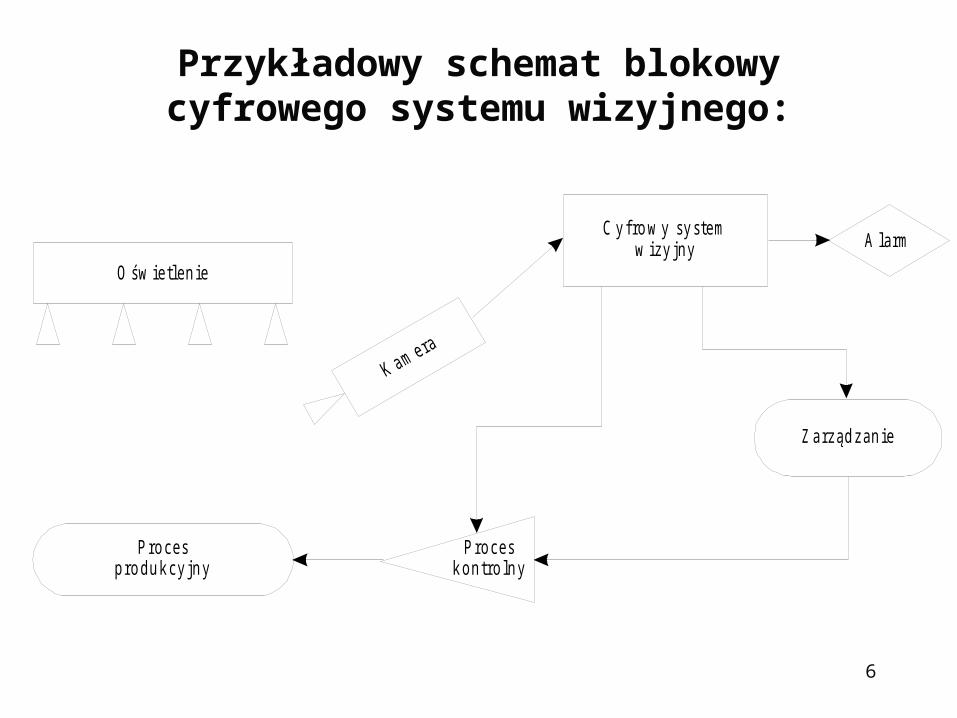
Przykładowy schemat blokowy cyfrowego systemu wizyjnego:
Procesp rodukcy jny
O św ie tlen ie
Proceskon tro lny
C yfrow y systemw izy jny
Z arządzan ie
A larm
7
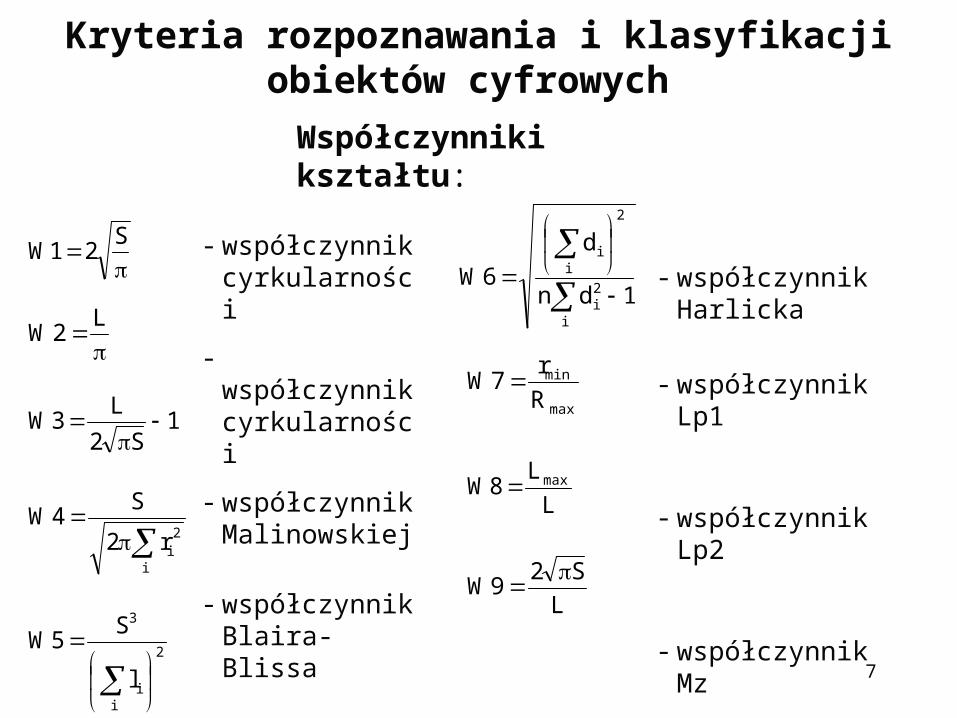
Kryteria rozpoznawania i klasyfikacji obiektów cyfrowych
S21W
L2W
1S2
L3W
i
2ir2
S4W
2
ii
3
l
S5W
i
2i
2
ii
1dn
d
6W
Współczynniki kształtu:
max
min
R
r7W
L
L8W max
L
S29W
- współczynnik cyrkularności
- współczynnik cyrkularności
- współczynnik Malinowskiej
- współczynnik Blaira-Blissa
- współczynnik Danielssona
- współczynnik Harlicka
- współczynnik Lp1
- współczynnik Lp2
- współczynnik Mz
8
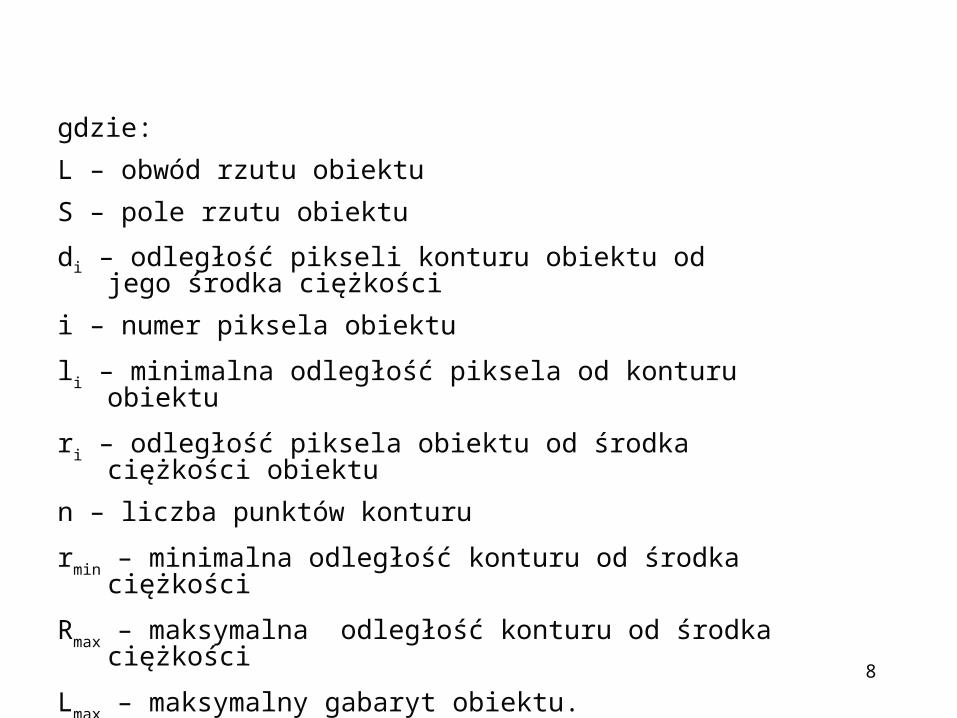
gdzie:
L – obwód rzutu obiektu
S – pole rzutu obiektu
di – odległość pikseli konturu obiektu od jego środka ciężkości
i – numer piksela obiektu
li – minimalna odległość piksela od konturu obiektu
ri – odległość piksela obiektu od środka ciężkości obiektu
n – liczba punktów konturu
rmin – minimalna odległość konturu od środka ciężkości
Rmax – maksymalna odległość konturu od środka ciężkości
Lmax – maksymalny gabaryt obiektu.
9
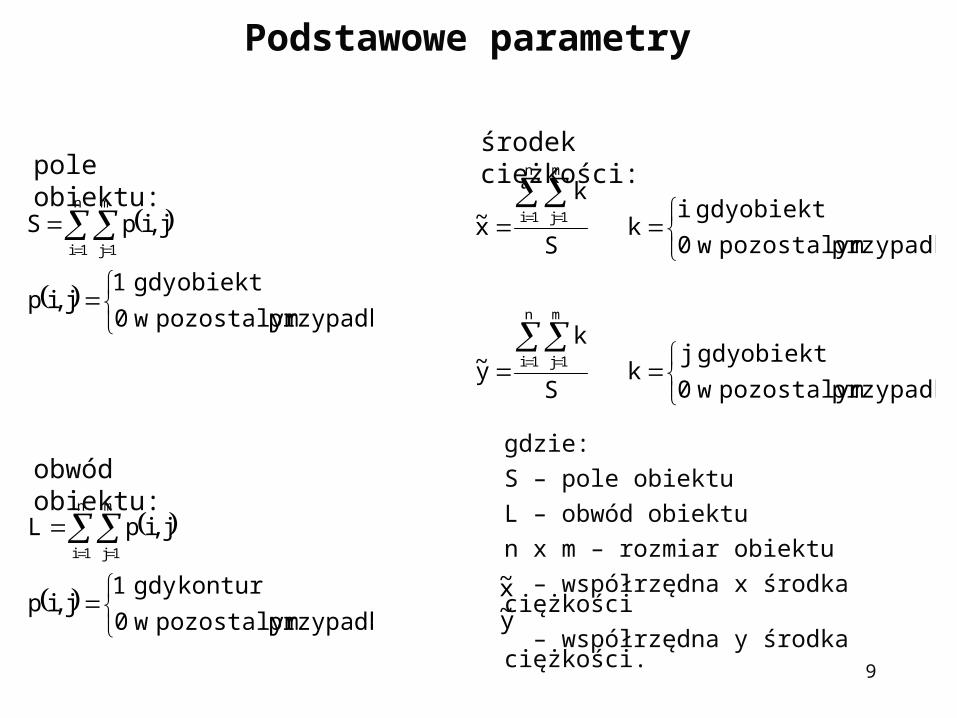
Podstawowe parametry
przypadkupozostalymw0
obiektgdy1j,ip
j,ipSn
1i
m
1j
przypadkupozostalymw0
konturgdy1j,ip
j,ipLn
1i
m
1j
przypadkupozostalymw0
obiektgdyjk
S
k
y~
przypadkupozostalymw0
obiektgdyik
S
k
x~
n
1i
m
1j
n
1i
m
1j
gdzie:
S – pole obiektu
L – obwód obiektu
n x m – rozmiar obiektu
– współrzędna x środka ciężkości
– współrzędna y środka ciężkości. x~
y~
środek ciężkości:pole obiektu:
obwód obiektu:
10
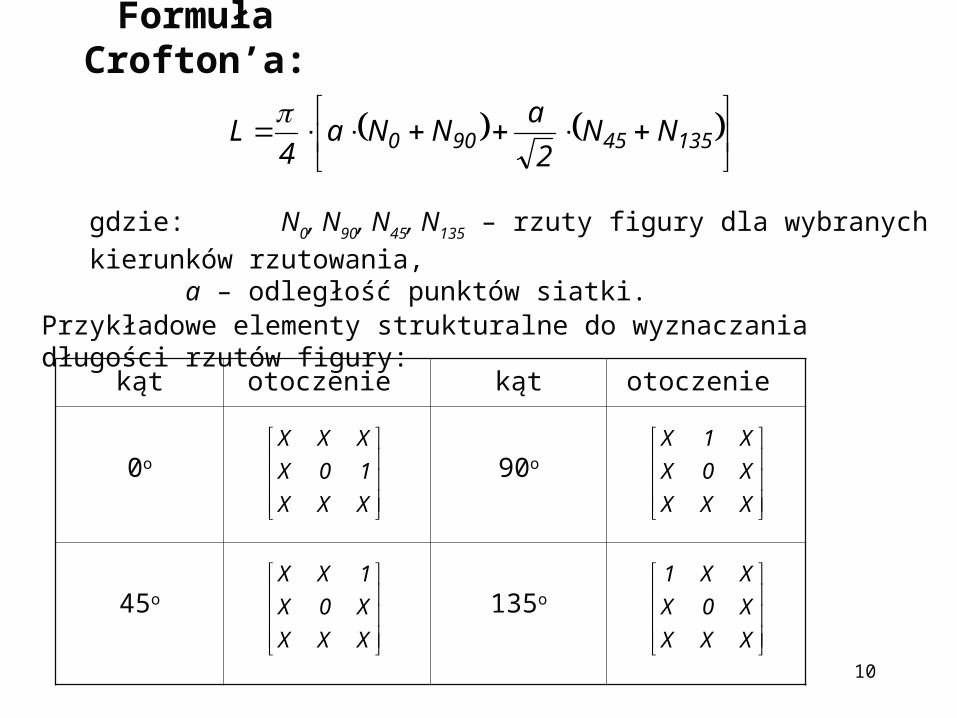
Formuła Crofton’a:
13545900 NN
2
aNNa
4L
gdzie: N0, N90, N45, N135 – rzuty figury dla wybranych kierunków rzutowania,
a – odległość punktów siatki.
Przykładowe elementy strukturalne do wyznaczania długości rzutów figury:
kąt otoczenie kąt otoczenie
0o 90o
45o 135o
XXX
10X
XXX
XXX
X0X
1XX
XXX
X0X
X1X
XXX
X0X
XX1
11
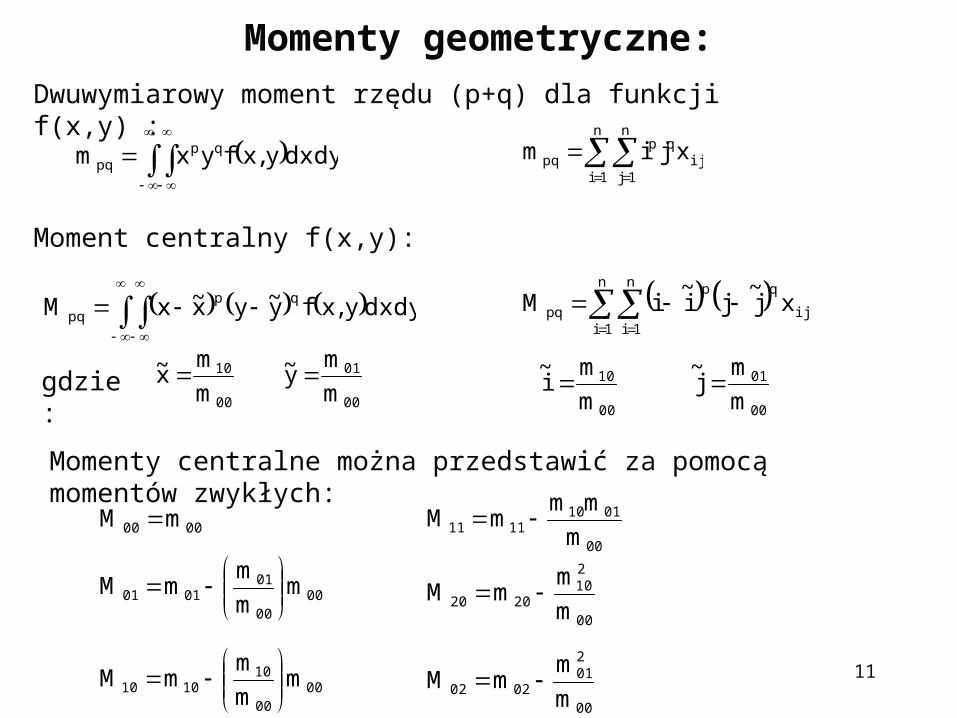
Momenty geometryczne:
dxdyy,xfyxm qppq
dxdyy,xfy~yx~xM qppq
00
10
m
mx~
00
01
m
my~
Dwuwymiarowy moment rzędu (p+q) dla funkcji f(x,y) :
n
1i
n
1jij
qppq xjim
Moment centralny f(x,y):
gdzie:
n
1i
n
1iij
qp
pq xj~
ji~
iM
00
10
m
mi~
00
01
m
mj~
Momenty centralne można przedstawić za pomocą momentów zwykłych:
0000 mM
0000
010101 m
m
mmM
0000
101010 m
m
mmM
00
01101111 m
mmmM
00
210
2020 m
mmM
00
201
0202 m
mmM

12
Z powyższych zależności możemy wyznaczyć niezmienniki momentowe:
2oo
0220
m
MM1M
4oo
211
20220
m
M4MM2M
5oo
20321
21230
m
MM3M3M3M
5oo
20321
21230
m
MMMM4M
20120112121 i
~m2j
~mi
~m2mM
21002111212 j
~m2i
~mj
~m2mM
210203030 i
~m2i
~m3mM
201020303 j
~m2j
~m3mM
1000
20321
2123003210321
20321
2123012301230
m
MMMM3MMMM3
MM3MMMMM3M5M
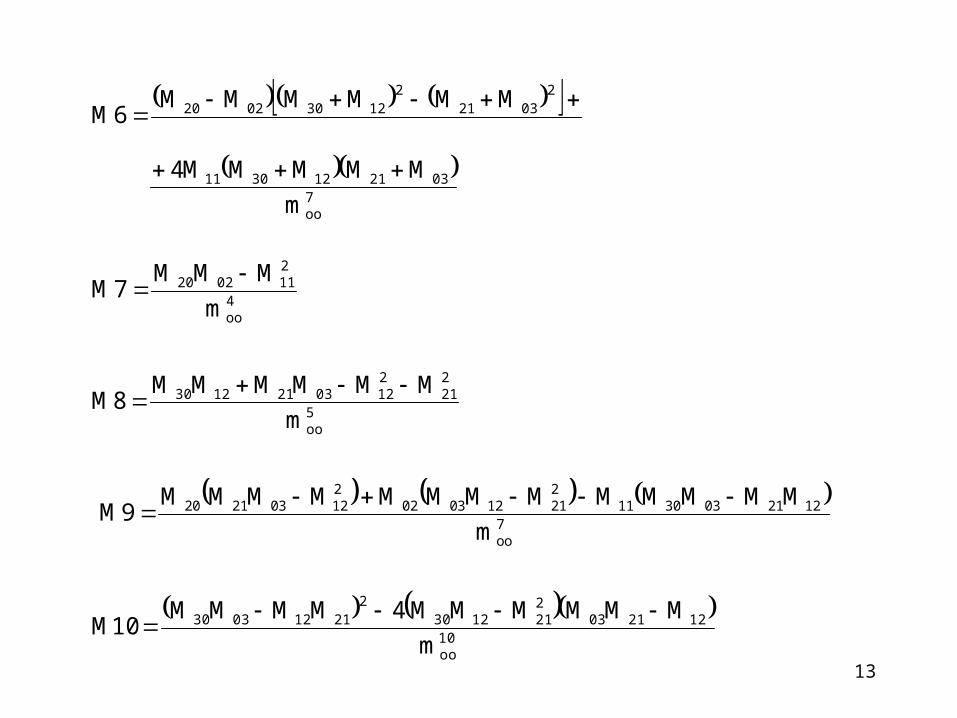
13
7oo
1221033011221120302
212032120
m
MMMMMMMMMMMMM9M
10oo
1221032211230
221120330
m
MMMMMM4MMMM10M
7oo
0321123011
20321
212300220
m
MMMMM4
MMMMMM6M
4oo
2110220
m
MMM7M
5oo
221
21203211230
m
MMMMMM8M
14
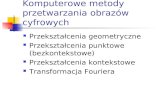
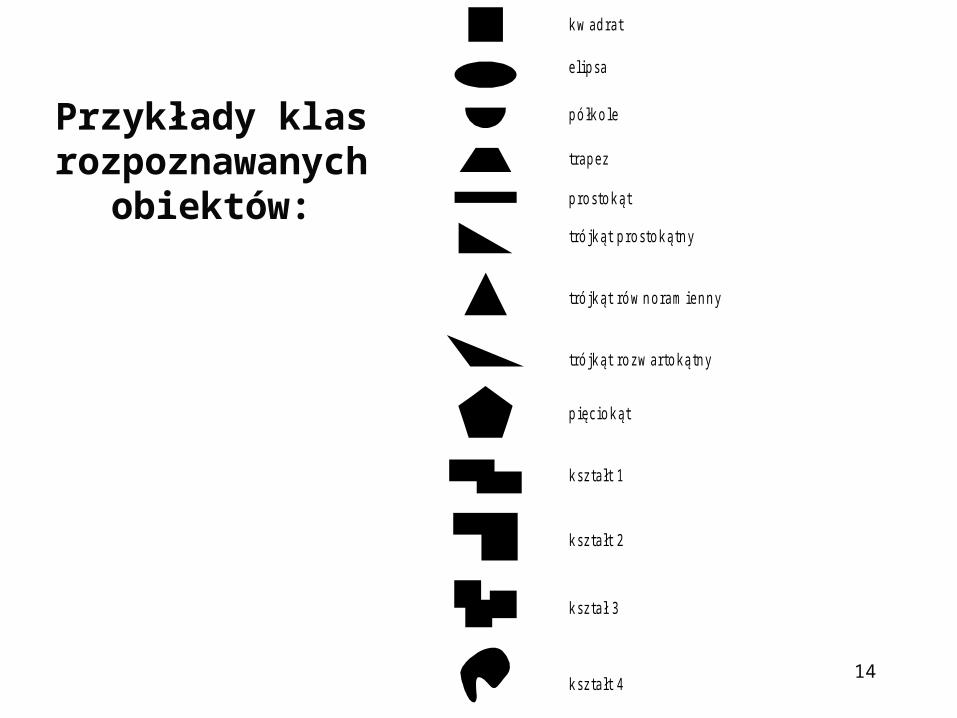
Przykłady klas rozpoznawanych
obiektów:
k w a d ra t
e lip sa
p ó łk o le
tra p e z
p ro s to k ą t
tró jk ą t p ro s to k ą tn y
tró jk ą t ró w n o ra m ie n n y
tró jk ą t ro z w a r to k ą tn y
p ię c io k ą t
k sz ta łt 1
k sz ta łt 2
k sz ta ł 3
k sz ta łt 4
15
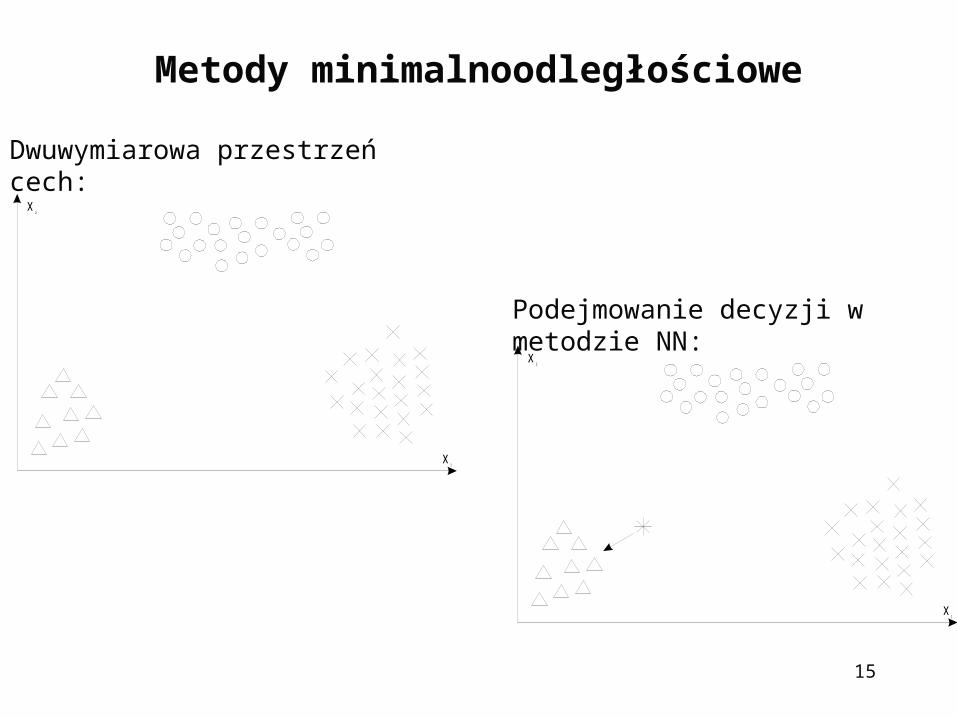
Metody minimalnoodległościowe
x2
x1
x2
x1
Dwuwymiarowa przestrzeń cech:
Podejmowanie decyzji w metodzie NN:
16
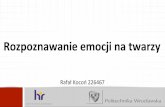
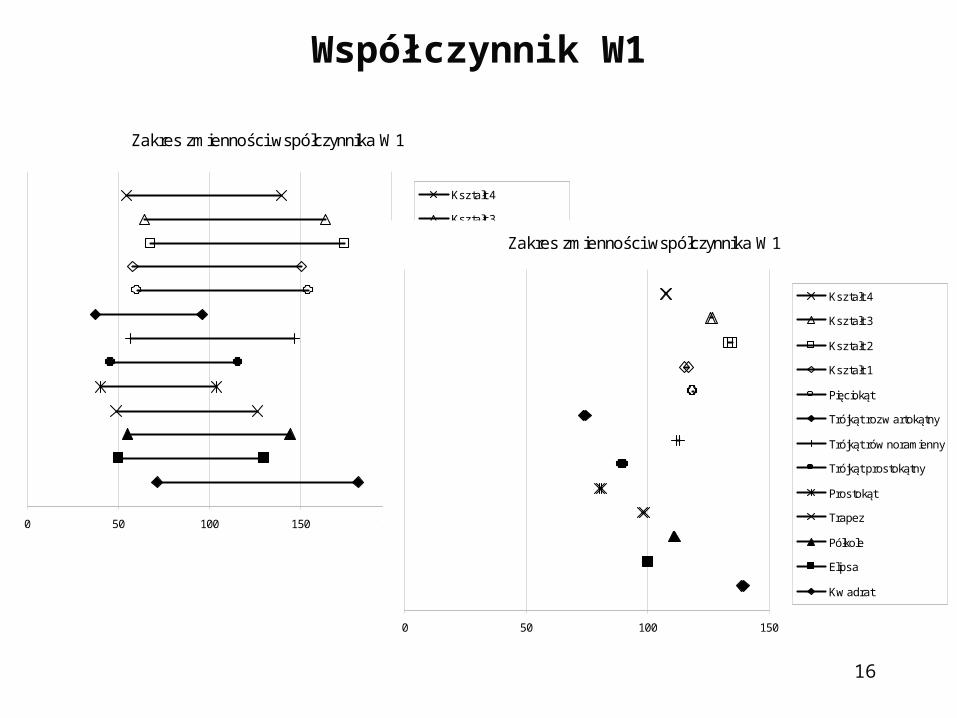
Współczynnik W1
Zakres zmienności współczynnika W1
0 50 100 150 200
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozw artokątny
Trójkąt rów noramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kw adrat
Zakres zmienności współczynnika W1
0 50 100 150
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozw artokątny
Trójkąt rów noramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kw adrat
17
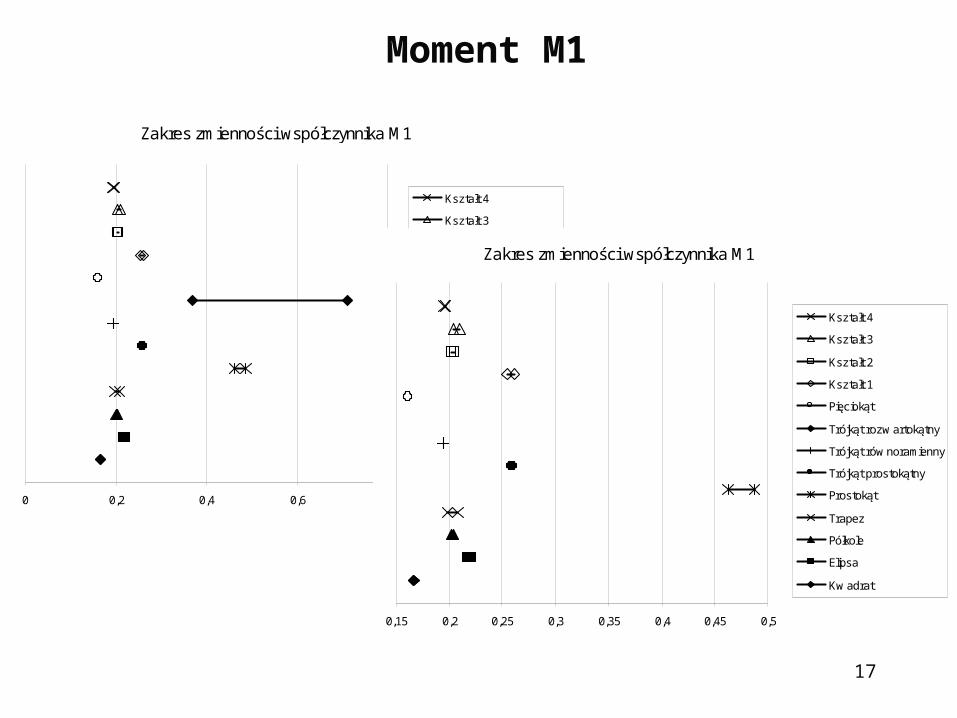
Moment M1
Zakres zmienności współczynnika M1
0 0,2 0,4 0,6 0,8
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozw artokątny
Trójkąt rów noramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kw adrat
Zakres zmienności współczynnika M1
0,15 0,2 0,25 0,3 0,35 0,4 0,45 0,5
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozw artokątny
Trójkąt rów noramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kw adrat
18
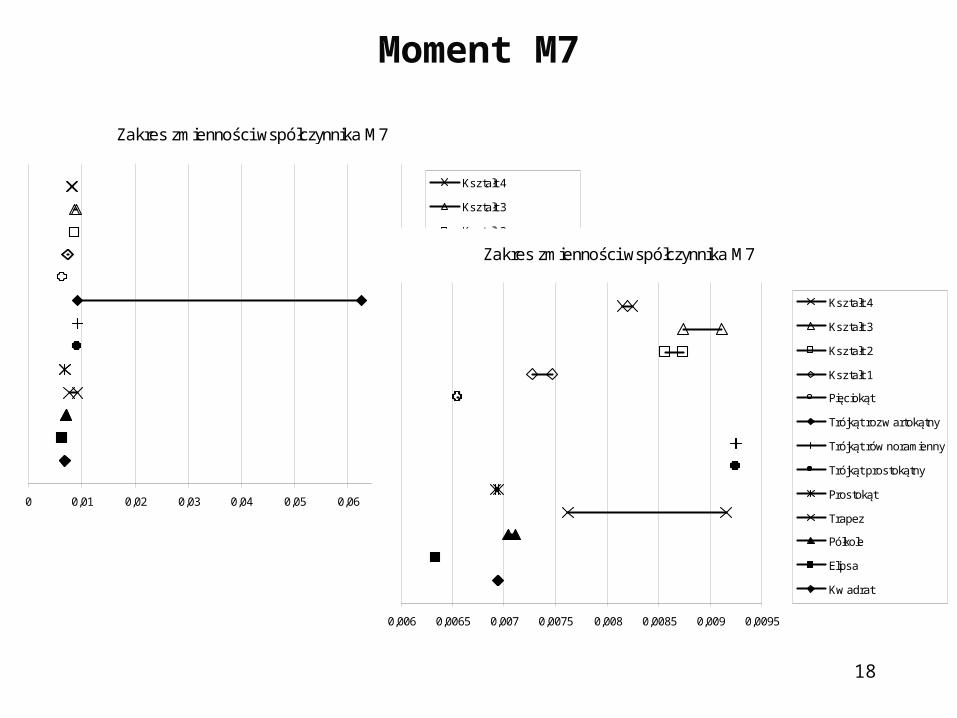
Moment M7
Zakres zmienności współczynnika M7
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozw artokątny
Trójkąt rów noramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kw adrat
Zakres zmienności współczynnika M7
0,006 0,0065 0,007 0,0075 0,008 0,0085 0,009 0,0095
Kształt 4
Kształt 3
Kształt 2
Kształt 1
Pięciokąt
Trójkąt rozw artokątny
Trójkąt rów noramienny
Trójkąt prostokątny
Prostokąt
Trapez
Półkole
Elipsa
Kw adrat