PRZEWODOWE I ŚWIATŁOWODOWE · 2013-06-07 · 1992 intel. 9 CAN – przepływ informacji ......
79
1 Foto: Mercedes - Benz PRZEWODOWE I ŚWIATŁOWODOWE MAGISTRALE TELEINFORMATYCZNE STOSOWANE W POJAZDACH Przygotował: mgr inż. Tomasz Widerski
Transcript of PRZEWODOWE I ŚWIATŁOWODOWE · 2013-06-07 · 1992 intel. 9 CAN – przepływ informacji ......

1 Foto: Mercedes - Benz
PRZEWODOWE I ŚWIATŁOWODOWE
MAGISTRALE TELEINFORMATYCZNE
STOSOWANE W POJAZDACH
Przygotował:
mgr inż. Tomasz Widerski
2
Plan prezentacji
Wprowadzenie
Magistrala CAN
Magistrale optyczne
„FlexRay”
Podsumowanie

3
Komunikacja w pojazdach
Magistrala danych
– fizyczne połączenie dwóch lub więcej urządzeń
zawierających układy mikroprocesorowe, które
służą do transmisji i rozdziału informacji

4
Komunikacja w nowoczesnym samochodzie
Awaryjność komponentów
elektronicznych w pojazdach
12%
sterowniki 54%
złącza, przewody 17%
czujniki
17%
nastawniki

5
Komunikacja w nowoczesnym samochodzie
Magistrale informatyczne są odpowiedzią na:
zwiększającą się liczbę czujników, elementów wykonawczych i sterowników w samochodach
zwiększającą się łączną długość przewodów elektrycznych i ilość złącz
rosnące wymagania dotyczące szybkości i dokładności pomiarów, przesyłu informacji oraz niezawodności
obniżanie kosztów produkcji

6
Komunikacja w nowoczesnym samochodzie
Korzyści ze stosowania magistrali informatycznych:
zmniejszenie liczby przewodów elektrycznych (obniżenie masy pojazdu)
zmniejszenie liczby złącz (zwiększenie niezawodności)
lepsze dopasowanie układów (kwantyzacja poziomów napięć, ujednolicenie sygnałów)
szybsza komunikacja
lepsza diagnostyka układów
odporność na zakłócenia (zwiększony udział sygnałów cyfrowych w wymianie danych)

7
Komunikacja w nowoczesnym samochodzie
Magistrale informatyczne spotykane w motoryzacji:
CAN

8
Magistrala CAN – historia
Magistrale informatyczne spotykane w motoryzacji:
BOSCHOpracowanie standardu CAN (Robert
Bosch GmbH) –
1986 Pierwszy kontroler magistrali CAN (Intel)
1987 Pierwsza implementacja (Mercedes
Benz model S) –
1992
intel

9
CAN – przepływ informacji
Magistrala CAN służy do przesyłu informacji pomiędzy
urządzeniami podłączonymi do niej.
1 32

10
CAN – warstwy aplikacyjne
Warstwa fizyczna:
Poziomy napięć i prędkości przesyłu
Medium transmisyjne
Topologia magistrali
Specyfikacja elementów nadawczych i odbiorczych
Warstwa transferowa (protokół):
Detekcja i blokada błędów
Potwierdzenie odbioru wiadomości
Arbitraż
Określony format wiadomości (ramka)
Chronometraż wiadomości
Standardy CAN:
ISO11529-2 (transfer 5kb/s ÷ 125kb/s)
ISO11898 (transfer do 1Mb/s)
Wersje CAN:
CAN A – ramka standardowa
CAN B – ramka rozszerzona

11
CAN – klasy zastosowań
Klasa A – komunikacja elektroniki Chassis (światła, kierunkowskazy,
siłowniki siedzeń i lusterek, centralny zamek) – szybkość przesyłu
<10kb/s, minimalizacja kosztów
Klasa B – urządzenia wymagające szybszej transmisji (klimatyzacja) –
szybkość przesyłu ≈40kb/s
Klasa C – wymagany transfer danych w czasie rzeczywistym (sterowanie
silnika, sterowanie skrzynią biegów, układy ABS, ESP, itp.) – szybkość
przesyłu 250kb/s÷1Mb/s, transfer wiadomości <1ms z cyklem 1÷10ms,
mała ilość danych
Klasa D – przesył dużej ilości danych (komunikacja multimedialna) –
szybkość przesyłu 100kb/s÷1Mb/s

12
CAN – rodzaje magistral
Źródło: AUDI
AUDI A4 2001r.

13
CAN – przykładowa implementacja
Telematik Telefon
Nawigacja
Kontrola głosem
Radio
CD
Tachograf
Pomoc przy
parkowaniu
Pomiar
ciśnienia opon
Moduł ABS
Sterowanie
silnikiem
Sterowanie
skrz. biegów
Kontrola trakcji
Kontrola kąta wychylenia
Klimatyzacja
Sterowanie silnikiem 2
Gateway
Antriebs-CAN 500 kb/s
Komfort-CAN 100 kb/s
Infotainment-CAN 100 kb/s
Diagnoza
Diagnose-CAN 100 kb/s
Kombi-CAN 500 kb/s
Źródło: AUDI

14
Magistrala CAN – systemy połączeń
Struktury:
a) linearna
b) gwiaździsta
c) pierścieniowa
1 32
3
5
12
4
32
41
a
b c

15
Magistrala CAN – systemy połączeń
Liczba wymaganych
przewodów: a) sterowanie tradycyjne
b) z wykorzystaniem magistrali CAN
P P
P
CAN
a)
b)

16
Magistrala CAN – elementy składowe
sterownik
Kontroler
CAN
Transceiver
Przewody magistrali Terminator
magistrali

17
CAN – linia przesyłowa
Przesył sygnału dwoma
przewodami tzw. skrętką.
3,5V
2,5V
1,5V
3,5V
2,5V
1,5V
CAN L
CAN H
Przeciwstawne napięcia na przewodach –
przesył metodą różnicową

18
CAN – charakterystyka linii przesyłowych
Długość magistrali
Przewód magistrali
Terminator Transfer
Rezystancja Przekrój
0 – 40m 70mΩ/m 0,25 - 0,34 mm2
AWG23, AWG22 124Ω (1%) 1Mb/s przy 40m
40 – 300 m <60mΩ/m 0,34 - 0,5 mm2
AWG22, AWG20 127Ω (1%) 500kb/s przy 100m
300 – 600 m <40mΩ/m 0,5 - 0,6 mm2
AWG20 150Ω - 300Ω 100kb/s przy 500m
600 – 1000 m <26mΩ/m 0,75 - 0,8 mm2
AWG18 150Ω - 300Ω 50kb/s przy 1000m
Linie doprowadzające do magistrali (łączna długość max. 30m):
max. 2m przy transferze do 250kb/s
max. 30cm przy transferze większym niż 250kb/s Źródło: Elektor Electronics

19
CAN – charakterystyka linii przesyłowych
Zależność pomiędzy max. długością magistrali i szybkością transferu:
długość szybkość = const.
( 1Mb/s 40m = 100kb/s 400m )

20
CAN – poziomy napięć
Zakłócające pola elektromagnetyczne znoszą się nawzajem
(suma napięć jest zawsze stała)
Napięcie na magistrali
(w odniesieniu do lokalnej masy)
Bit recesywny 1 Bit dominujący 0
Przewód CAN LOW 2,5V 1,5V
Przewód CAN HIGH 2,5V 3,5V
Dopuszczalna różnica napięć pomiędzy przewodami 0 ÷ 0,5V 0,9 ÷ 2V
Bit recesywny może być nadpisany przez bit dominujący (wysłanie różnych bitów
przez dwie stacje powoduje, że tylko jedna będzie „słyszana” przez pozostałe
komponenty magistrali)

21
Magistrala CAN - transmisja danych
przejmowanie
danych
kontrola
danych
odbiór
danych
przygotowanie
danych
wysyłanie
danych
kontrola
danych
odbiór
danych
przejmowanie
danych
kontrola
danych
odbiór
danych
Sterownik 1 Sterownik 2 Sterownik 3 Sterownik 4

22
Magistrala CAN - transmisja danych
przejmowanie
danych
kontrola
danych
odbiór
danych
przygotowanie
danych
wysyłanie
danych
kontrola
danych
odbiór
danych
przejmowanie
danych
kontrola
danych
odbiór
danych
Sterownik 1 Sterownik 2 Sterownik 3 Sterownik 4
Przekazanie danych ze
sterownika do kontrolera
CAN
23
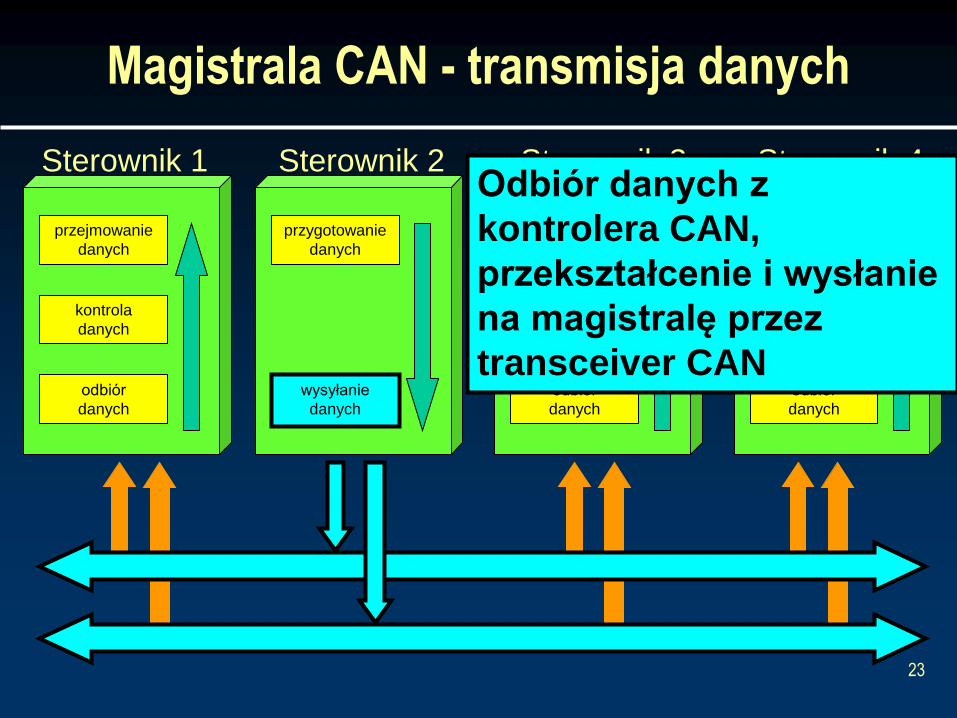
Magistrala CAN - transmisja danych
przejmowanie
danych
kontrola
danych
odbiór
danych
przygotowanie
danych
wysyłanie
danych
kontrola
danych
odbiór
danych
przejmowanie
danych
kontrola
danych
odbiór
danych
Sterownik 1 Sterownik 2 Sterownik 3 Sterownik 4 Odbiór danych z
kontrolera CAN,
przekształcenie i wysłanie
na magistralę przez
transceiver CAN

24
Magistrala CAN - transmisja danych
przejmowanie
danych
kontrola
danych
odbiór
danych
przygotowanie
danych
wysyłanie
danych
kontrola
danych
odbiór
danych
przejmowanie
danych
kontrola
danych
odbiór
danych
Sterownik 1 Sterownik 2 Sterownik 3 Sterownik 4 Pobranie
danych z
magistrali
przez
pozostałe
sterowniki
(odbiorniki)
25
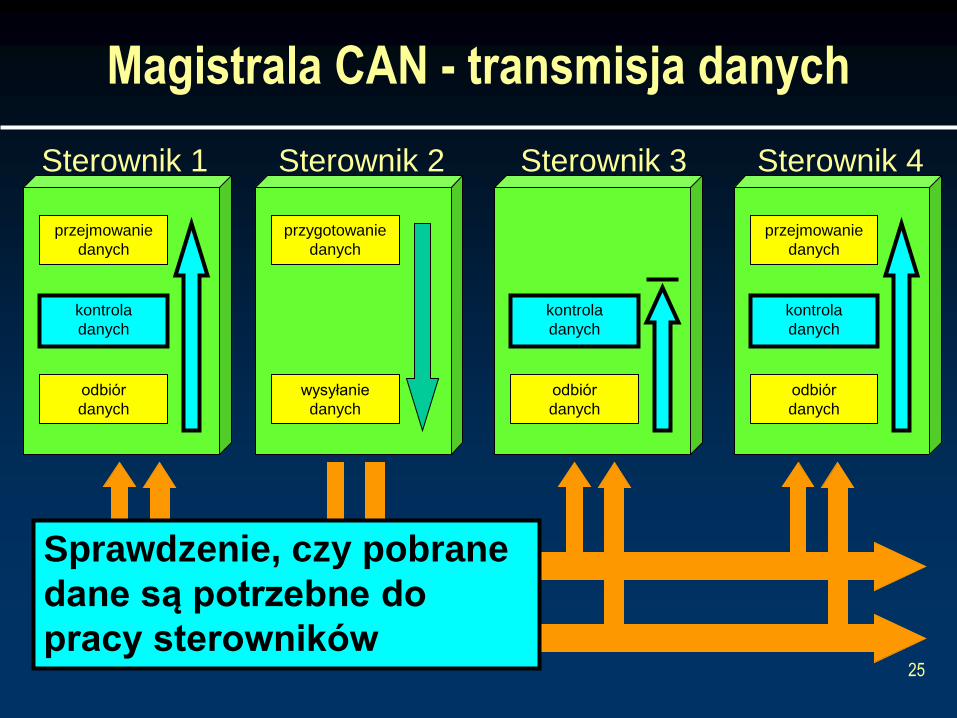
Magistrala CAN - transmisja danych
przejmowanie
danych
kontrola
danych
odbiór
danych
przygotowanie
danych
wysyłanie
danych
kontrola
danych
odbiór
danych
przejmowanie
danych
kontrola
danych
odbiór
danych
Sterownik 1 Sterownik 2 Sterownik 3 Sterownik 4
Sprawdzenie, czy pobrane
dane są potrzebne do
pracy sterowników
26
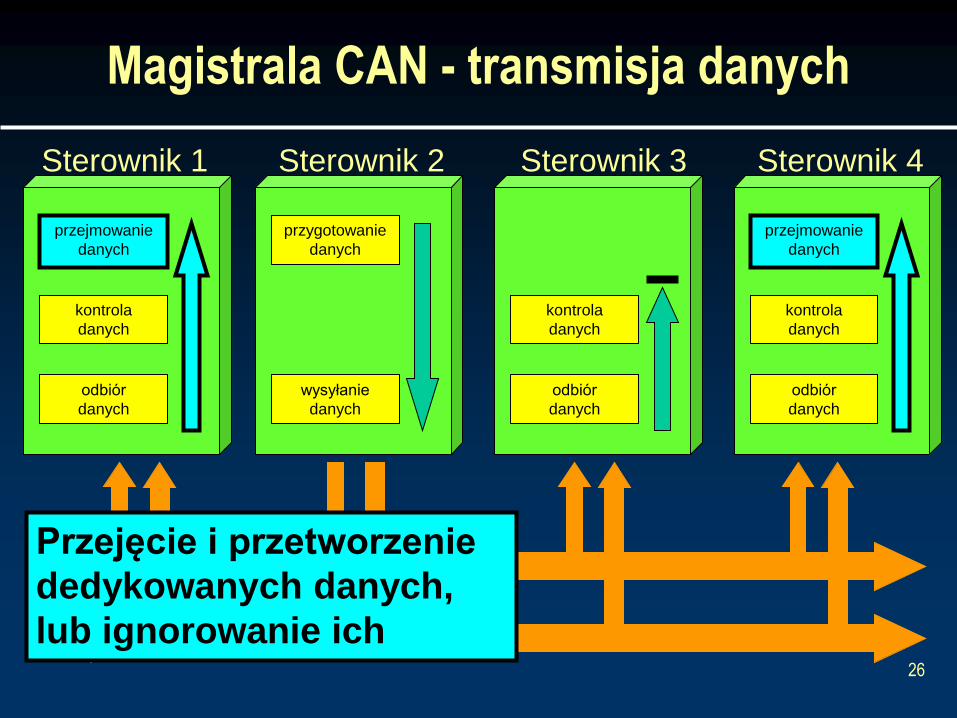
Magistrala CAN - transmisja danych
przejmowanie
danych
kontrola
danych
odbiór
danych
przygotowanie
danych
wysyłanie
danych
kontrola
danych
odbiór
danych
przejmowanie
danych
kontrola
danych
odbiór
danych
Sterownik 1 Sterownik 2 Sterownik 3 Sterownik 4
Przejęcie i przetworzenie
dedykowanych danych,
lub ignorowanie ich

27
CAN – wymiana danych
System asynchroniczny przesyłu danych
Komunikacja jest synchronizowana poprzez wiadomość wysyłaną
przez sterownik – zbocza narastające / opadające kolejnych bitów.
Wymiana komunikatów:
– Odwołanie do określonego sterownika
sterownik nadający podaje adres odbiorcy; odbiorca potwierdza
odbiór
– Podanie określonej wiadomości
nadajnik dołącza do komunikatu identyfikator określający
charakter wiadomości (brak adresów); pozostałe stacje same
decydują, czy informacja jest im potrzebna
28
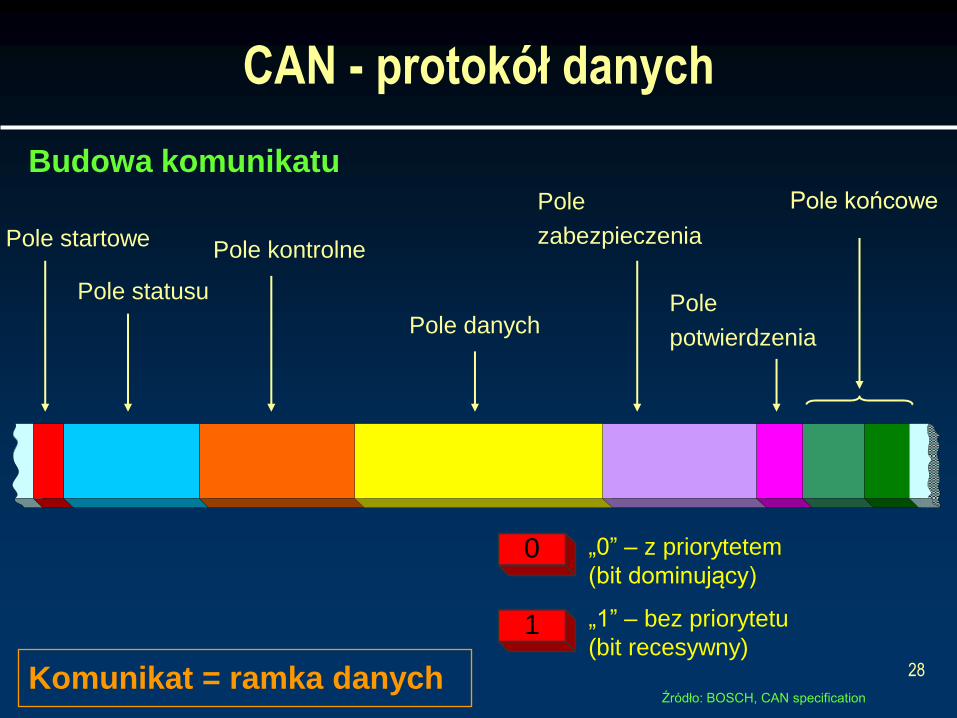
CAN - protokół danych
Komunikat = ramka danych
Budowa komunikatu
Źródło: BOSCH, CAN specification
Pole startowe
Pole statusu
Pole kontrolne
Pole
zabezpieczenia
Pole danych Pole
potwierdzenia
Pole końcowe
0
1
„0” – z priorytetem
(bit dominujący)
„1” – bez priorytetu
(bit recesywny)

29
CAN - protokół danych
Budowa komunikatu
Pole startowe (Start of Frame - SOF)
– bit dominujący (0) określający początek ramki (1bit);
zbocze narastające synchronizuje wymianę danych
Źródło: BOSCH, CAN specification

30
CAN - protokół danych
Budowa komunikatu
Pole statusu (Arbitration Field, Identifier) - 12bitów
– identyfikator informacji, określa priorytet komunikatu, im mniejsza
wartość, tym większy priorytet (11bitów)
CAN2.0A (standard CAN) – 11bitów (211 = 2048 ramek), transfer 5÷125kb/s
CAN2.0B (extended CAN) – 29bitów (229 = 536 870 912 ramek), transfer 5÷1000kb/s
Źródło: BOSCH, CAN specification

31
CAN - protokół danych
Budowa komunikatu
Pole statusu (Arbitration Field, Identifier) - 12bitów
Źródło: BOSCH, CAN specification
- zdalne żądanie transmisji (Remote Transmision Request – RTR) –
1 bit (0), umożliwia zaadresowanie ramki do określonego sterownika

32
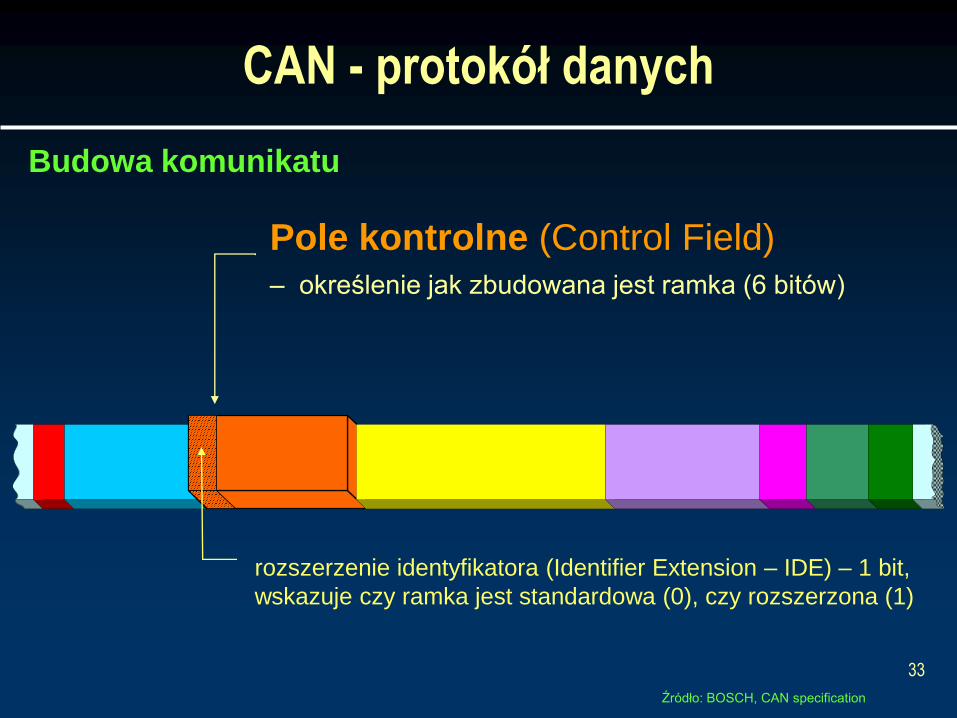
CAN - protokół danych
Budowa komunikatu
Pole kontrolne (Control Field)
– określenie jak zbudowana jest ramka (6 bitów)
Źródło: BOSCH, CAN specification
33
CAN - protokół danych
Budowa komunikatu
Pole kontrolne (Control Field)
– określenie jak zbudowana jest ramka (6 bitów)
Źródło: BOSCH, CAN specification
rozszerzenie identyfikatora (Identifier Extension – IDE) – 1 bit,
wskazuje czy ramka jest standardowa (0), czy rozszerzona (1)

34
CAN - protokół danych
Budowa komunikatu
Pole kontrolne (Control Field)
– określenie jak zbudowana jest ramka (6 bitów)
Źródło: BOSCH, CAN specification
bit rezerwowy (r0)

35
CAN - protokół danych
Budowa komunikatu
Pole kontrolne (Control Field)
– określenie jak zbudowana jest ramka (6 bitów)
Źródło: BOSCH, CAN specification
Wskazanie długości pola danych (Data Length Code – DLC)
– 4 bity

36
CAN - protokół danych
Budowa komunikatu
Pole danych (Data Field)
– przesyłane dane od 0 do 64bitów (0÷8bajtów)
Źródło: BOSCH, CAN specification

37
CAN - protokół danych
Budowa komunikatu
Pole zabezpieczenia CRC
(Cyclic Redundancy Check Field)
– wykrywanie zakłóceń transmisji (16bitów)
Źródło: BOSCH, CAN specification
ogranicznik CRC – 1 bit (0)
Nadajnik tworzy z danych 15-bitową sumę kontrolną; odbiornik oblicza taką
samą sumę na podstawie odebranych danych; przy braku zgodności
uruchamia się procedura korekcji błędów.

38
CAN - protokół danych
Budowa komunikatu
Pole potwierdzenia ACK
(Acknowledge Field)
– potwierdzenie odbioru – „1” (2bity)
Źródło: BOSCH, CAN specification
ogranicznik ACK – 1 bit (1)
Pole ACK umożliwia przesłanie potwierdzenia odbioru; W tym miejscu
odbiornik przesyła potwierdzenie odbioru poprzedniej ramki (bit dominujący);
nadajnik odbiera „0” zamiast swojej „1”.

39
CAN - protokół danych
Budowa komunikatu
Pole końcowe EOF
(End of Frame)
– koniec ramki danych (7bitów recesywnych)
Źródło: BOSCH, CAN specification

40
CAN - protokół danych
Budowa komunikatu
Przerwa pomiedzy ramkami IFS
(Inter Frame Space)
– rezerwacja czasu na poprawne wprowadzenie odebranych danych (3bity recesywne))
Źródło: BOSCH, CAN specification

41
CAN – arbitraż
Arbitraż umożliwia ustalenie pierwszeństwa podczas wysyłania informacji
Źródło: Ńkoda
0
1
„0” – z priorytetem
(bit dominujący)
„1” – bez priorytetu
(bit recesywny)
ster. autom.
skrzyni biegów
ster. ABS
ster. Motronic
magistrala
Pole
sta
rto
we
Pole statusu
bit1
bit2
bit3
0 0 0
10
0 01
0
0 0 01
0
01
0 0
Założenie:
Każdy sterownik podczas
nadawania jednocześnie
odbiera sygnały z magistrali;
jeżeli bity się pokrywają
nadawanie jest dozwolone

42
CAN – żądanie danych
Natychmiastowe żądanie informacji przez dane urządzenie z pominięciem
„kolejki”:
Wysłanie ramki zdalnego żądania transmisji RRF
Rozpoznanie ramki RRF przez inne sterowniki; wstrzymanie nadawania
Ustalenie do którego sterownika jest adresowane żądanie (identyfikator)
Przesłanie informacji przez wywołany sterownik
Różnice pomiędzy ramką danych a RRF:
– identyfikator pytanego sterownika jest umieszczony w polu identyfikatora
– w polu DLC podawana jest liczba bajtów rezerwowanych dla żądanej
wiadomości
– bit RTR jest recesywny (1)
– brak pola danych (0 bajtów)

43
CAN – wykrywanie błędów
Niezawodność magistrali CAN:
1 nie wychwycony błąd na 1000 lat pracy (co 0,7s pojawia się błędny bit)
Wykrywanie błędów:
Na magistrali pojawiają się sygnały tylko z jednego sterownika (po arbitrażu); on
sam powinien „słyszeć” swoje sygnały; niezgodność świadczy o błędnej transmisji.
Każde 5 kolejnych bitów o jednakowej wartości jest poprzedzone bitem
komplementarnym - dodatkowym (oprócz pola EOF); jeżeli sterownik odbiera więcej
niż 5 bitów o jednakowej wartości, to jest to traktowane jako błąd
Szacowanie sumy kontrolnej przez odbiornik w polu CRC
Brak nadpisania bitu przerwy ACK jest traktowane przez nadajnik jako brak odbioru
komunikatu przez inne węzły magistrali
Kontrola niektórych pól w ramce, które mają określoną wartość (ogranicznik CRC,
ogranicznik ACK, pole EOF – bity recesywne)

44
CAN – korekcja błędów
Korekcja błędów:
Ramki błędne nie są przetwarzane
Sterownik, który wykrył błąd, celowo wysyła błędną ramkę na magistralę
(6 bitów dominujących + 8 bitów recesywnych) – wszystkie sterowniki na
magistrali albo odbierają poprawne komunikaty, albo odrzucają błędne
dane (informacja globalna o lokalnym błędzie)

45
CAN – uszkodzenia sieci
Topologia połączeń gwarantuje nieprzerwaną komunikację
nawet w przypadku:
Przerwania jednego z przewodów
Zwarcia jednego z przewodów do masy
Zwarcia jednego z przewodów do „plusa” zasilania
UWAGA! – Możliwa jest znaczna redukcja poziomów sygnałów,
nawet do poziomów szumów

46
CAN – uszkodzenia sieci
Uszkodzenia „skrętki”:
Naprawa wymaga staranności (miejsce
naprawy, może powodować odbicia
sygnałów i przekłamania w transmisji)
Ograniczona ilość napraw
Kolejne naprawy min. co 10cm, na
długości max. 5cm
Uszkodzenia terminatora (zmiana oporu):
Pomiar rezystancji przy włączonej sieci (wynik – połowa rezystancji nominalnej)
Pomiar rezystancji przed i po odłączeniu końcowego sterownika (brak zmian
świadczy o uszkodzeniu)

47
CAN – podsumowanie
Możliwość wykorzystania różnych struktur magistrali:
gwiaździsta, pierścieniowa, linearna.
Maksymalna ilość węzłów w systemie:
– 32 – zastosowania standardowe
– 64÷128 – zastosowania specjalne
Szybkość transferu od 5kb/s do 1Mb/s
– elektronika napędu - 500kb/s (Ńkoda) (komunikat – 0,25ms, próba
połączenia – 720ms)
– elektronika komfortowa – 62,5kb/s (Ńkoda) (komunikat – 1ms,
próba połączenia – 20ms)
Rozszerzenie protokołu transmisji wymaga jedynie zmian
programowych
Ogólnie obowiązująca norma umożliwia stosowanie
sterowników różnych producentów

48
LIN - Local Interconnect Network
Zalety sieci LIN:
Prostota
Niski koszt
Zwiększenie:
Szybkość transmisji
Funkcjonalność
Niezawodność
Magistrala LIN łączy niewielką liczbę czujników i elementów
wykonawczych z jednym nadrzędnym sterownikiem.

49
Połączenie sieci LIN i CAN
Magistrala LIN uzupełnia magistralę CAN, ale jej
nie zastępuje.
A BGATEWAY
2 31
CAN
LIN
Zastosowanie magistrali
LIN zwiększa:
Szybkość transmisji
Funkcjonalność
niezawodność

50
Cechy magistrali
Transmisja <20kb/s
Jednoprzewodowość
Architektura master-slave
Samoczynna synchronizacja komunikacji
LIN -
sterowanie
lusterkami
mikrosilnik
LIN - układ
kierowniczy
LIN - sterowanie
fotelem kierowcy
grzejnik
blok
przełączników
LIN - ster. fotelem pasażera
Sterownik centralny (ECU - Master)
CAN
Niezależnie od
wyposażenia
samochodu badanego
oprogramowanie LIN
Master’a zawsze
odpowiada
wyposażeniu
pełnemu.

51
Przykładowa aplikacja
Układ sterowania
klimatyzacją
(AUDI A8 2003r)
Zastosowanie magistrali LIN
zaoszczędziło 25m okablowania
i zmniejszyło masę pojazdu o 3kg. M
tº
SLAVE
MASTER
CAN
MASTER: pełni rolę modułu Gateway monitoruje dane ustala prędkość transmisji ustala kolejność i przydział czasowy dla poszczególnych węzłów diagnozuje sieć

52
Ramka danych
nagłówek (żądanie informacji od węzła) odpowiedź węzła
przerwa
synchronizacyjna
pole synchronizacji
węzłów „Slave”
„delimiter"
identyfikator 2, 4 lub 8 pól danych
bit
startowy
bit
końcowy
0 1 2 3 4 5 6 7
10 bitów
Identyfikacja
początku nowej
ramki (13 bitów).
„0” – bit dominujący
„1” – bit recesywny
Adres węzła
podrzędnego
(8 bitów).

53
Ramka danych
Przebiegi rzeczywiste
Nagłówek Odpowiedź
Bity recesywne
Bity dominujące
Przerwa
synchronizacyjna
Delimiter
Pole
synchronizacji
Identyfikator Bit startowy
Dane
Bit końcowy

54
Odpowiedzi węzła
Odpowiedź węzła:
- rzeczywista odpowiedź (np. przekazanie informacji o
wartości jakiegoś parametru)
- wmuszenie ustawienia parametru (węzeł „Master” w czasie
„odpowiedzi” nadaje wartość jaką ma ustawić „Slave”)

55
Poziomy napięć
Strona nadawcza Strona odbiorcza
Ubat.
80% Ubat.
20% Ubat.
0V
Ubat.
60% Ubat.
40% Ubat.
0V
Bity recesywne
Bity dominujące

56
Magistrale optyczne
Wprowadzenie sieci optycznych do samochodów jest
odpowiedzią na:
rozbudowę systemów multimedialnych
wymaganych dużych szybkości transferu danych
(min. 14,51 Mb/s dla multimediów)
potrzebę eliminacji zakłóceń
Umożliwiły one:
zwiększenie transferu
eliminację zakłóceń elektromagnetycznych Źródło: AUDI

57
DVD Video DAB radio cyfrowe
Telefon
Nawigacja
CD/DVD
CD/MD Audio Internet
TV tuner
Magistrala MOST
Powstanie magistrali MOST
1998
Sieć orientowana na przesył
obrazu i dźwięku.

58
Struktura i cechy
Źródło: AUDI
Zmieniarka CD
TelematykaWyświetlacz
Gateway Tuner TV
Tuner radiowyCzytnik map
Nawigacja
Wzmacniacz
Kontrola
głosowa
Podstawowe cechy:
Architektura – pojedynczy
pierścień
Przepustowość max 21,1
Mb/s
Częstotliwość
nadawania ramek 44.1kHz
Modułowość
Niewrażliwość na
zakłócenia
Autonadzór

59
Warstwa fizyczna
Źródło: AUDI
Przesył sygnałów za pomocą
światłowodu o śr. 0,9mm
(światło podczerwone
λ=650nm)
Światłowód
Złącze
optyczne
Zasilanie
wewnętrzneZłącze
elektryczne
Złącze
diagnostyczne
Pozostałe
podzespoły
MikrokontrolerDekoder MOSTLED Fotodetektor
światłowód
zakończenie
światłowodumechanizm
blokujący
powierzchnia kontaktowa
światłowodu
wskaźnik kierunku
przepływu sygnału
obudowa gniazda
wtyczka
Najdłuższe odcinki do kilku metrów
(max tłumienie 3dB)

60
Stany pracy
Tryb uśpienia – brak wymiany danych,
wszystkie urządzenia przerywają pracę (brak
autodiagnozy, żądania informacji)
Tryb gotowości – uaktywnienie przez jakiś
sterownik, funkcje systemu nie są dostępne,
sieć jest gotowa do działania
Tryb pracy – wszystkie funkcje są dostępne
61
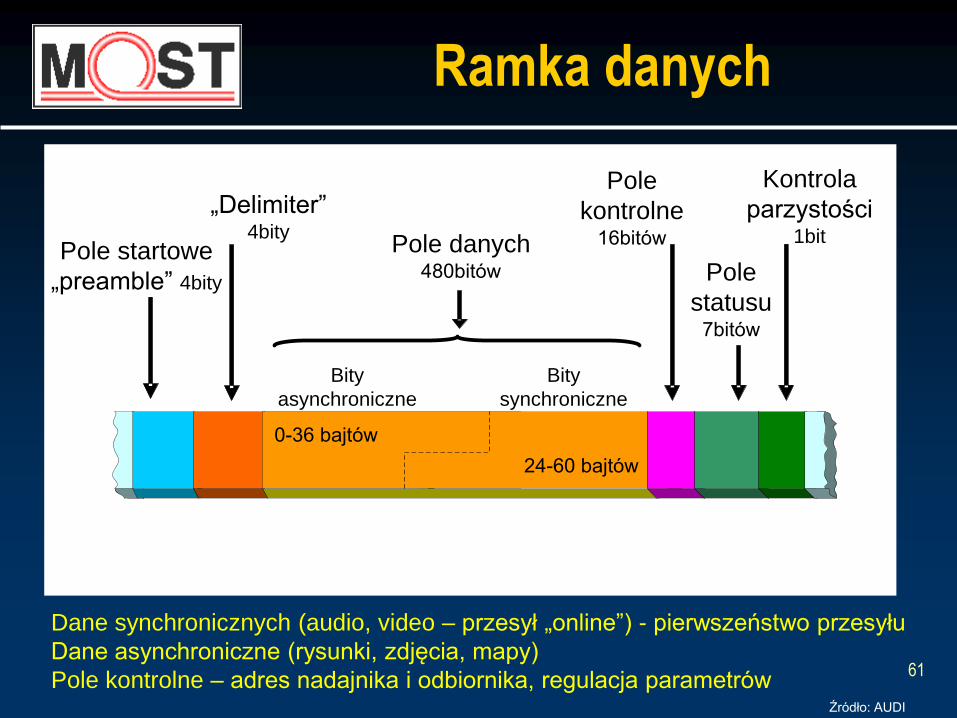
Ramka danych
Źródło: AUDI
Pole startowe
„preamble” 4bity
„Delimiter”4bity
Pole danych480bitów
Bity
asynchroniczne
Pole
kontrolne16bitów
Kontrola
parzystości1bit
Bity
synchroniczne
Pole
statusu7bitów
0-36 bajtów
24-60 bajtów
Dane synchronicznych (audio, video – przesył „online”) - pierwszeństwo przesyłu
Dane asynchroniczne (rysunki, zdjęcia, mapy)
Pole kontrolne – adres nadajnika i odbiornika, regulacja parametrów
62
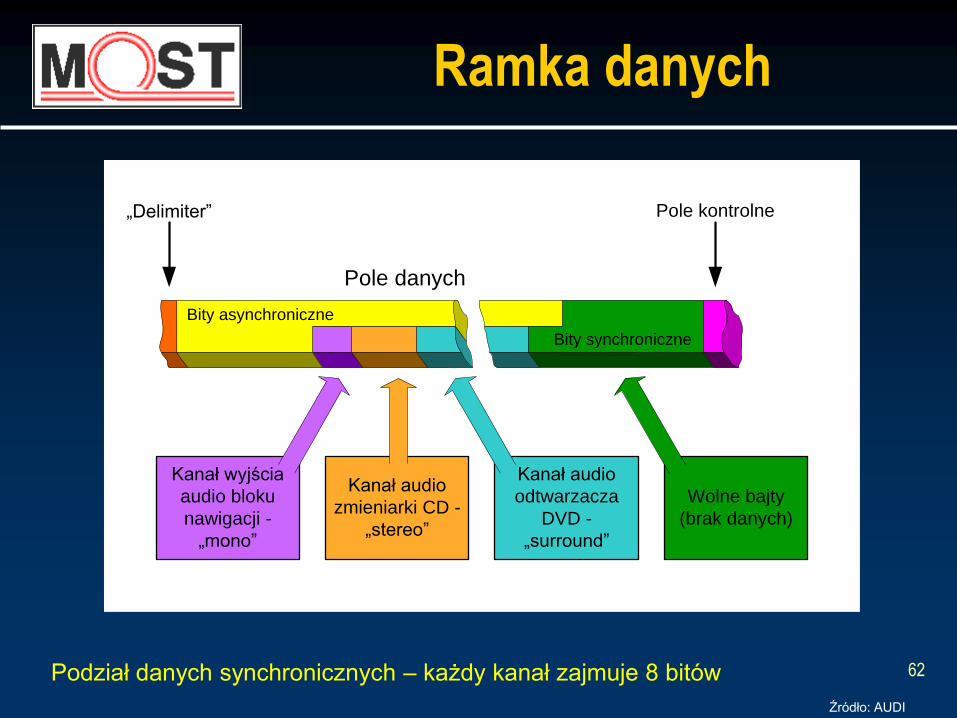
Ramka danych
Źródło: AUDI
Podział danych synchronicznych – każdy kanał zajmuje 8 bitów
Pole danych
„Delimiter” Pole kontrolne
Kanał audio
zmieniarki CD -
„stereo”
Kanał audio
odtwarzacza
DVD -
„surround”
Kanał wyjścia
audio bloku
nawigacji -
„mono”
Wolne bajty
(brak danych)
Bity asynchroniczne
Bity synchroniczne
63
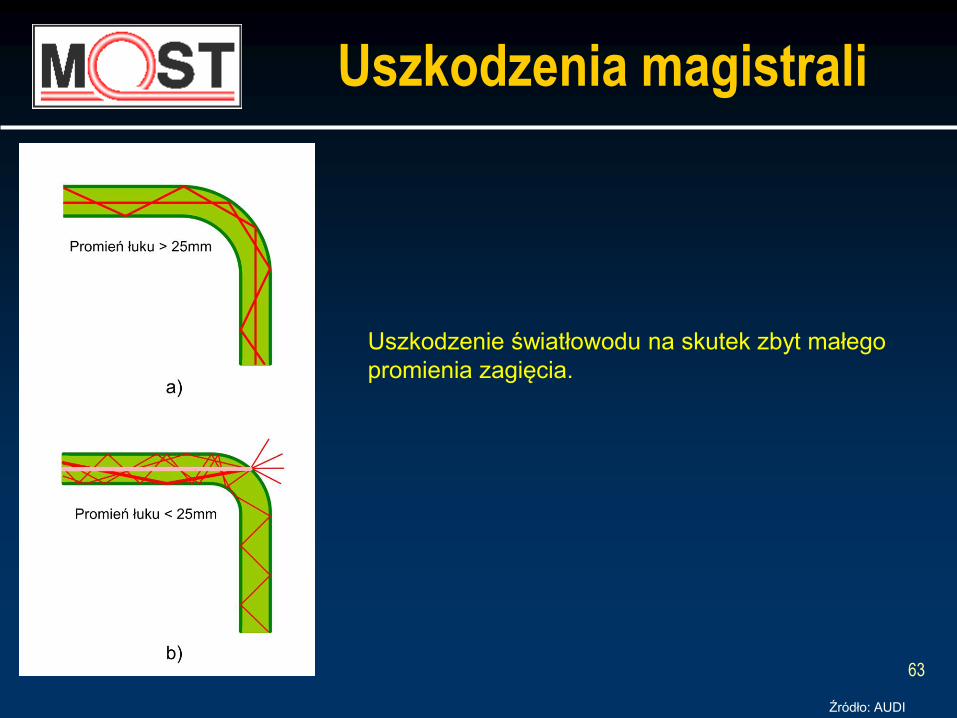
Uszkodzenia magistrali
Źródło: AUDI
Uszkodzenie światłowodu na skutek zbyt małego
promienia zagięcia.

64
Uszkodzenia magistrali
Źródło: AUDI
Typowe usterki przewodów światłowodowych:
1.załamany przewód,
2.uszkodzona warstwa ochronna,
3.zarysowania powierzchni kontaktowych,
4.zabrudzenia powierzchni kontaktowych,
5.przesunięcie powierzchni kontaktowych,
6.załamanie wtyczki,
7.przerwa w złączu,
8.zbyt mocno zaciśnięta końcówka.
65
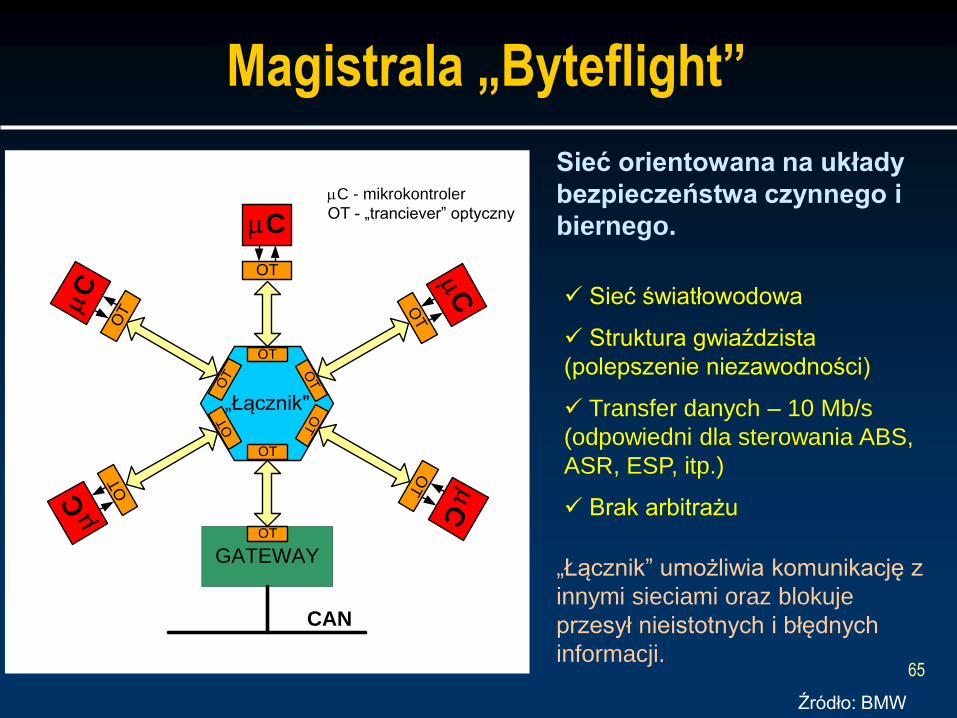
Magistrala „Byteflight”
Sieć orientowana na układy
bezpieczeństwa czynnego i
biernego.
Źródło: BMW
„Łącznik"
OT
OT
OT
OT
OT
C
OT
C
OT
C
OT
C
OT
C
OT
OT
GATEWAY
OT
CAN
C - mikrokontroler
OT - „tranciever” optyczny
„Łącznik” umożliwia komunikację z
innymi sieciami oraz blokuje
przesył nieistotnych i błędnych
informacji.
Sieć światłowodowa
Struktura gwiaździsta
(polepszenie niezawodności)
Transfer danych – 10 Mb/s
(odpowiedni dla sterowania ABS,
ASR, ESP, itp.)
Brak arbitrażu

66
„Byteflight” – protokół transmisji
Źródło: BMW
1
Dane o wysokim priorytecie
(transmisja synchroniczna)
Dane o niskim priorytecie
(transmisja asynchroniczna)
2 3 10 35 1 2 3 10 38 75
SYNC
Podział na cykle 250 μs (przerwa synchronizacyjna SYNC)
Zmiana impulsów SYNC wskazuje na stan alarmowy.

67
„Byteflight” – ramka danych
Źródło: BMW
ID – bity identyfikacyjne (8 bitów)
LEN – informacja o długości wiadomości (8 bitów)
D0D11 – dane (12 bajtów)
CRC – pole zabezpieczenia (16 bitów)
Czas trwania wiadomości – 4,616,6 μs
Każde pole poprzedza bit startowy (100ns) – przerwa pomiędzy polami nie jest
odbierana jako SYNC
LEN D0 D11 CRCID
Bity startowe
(6bitów)
Koniec wiadomości
(2x ”0")
100 ns
68
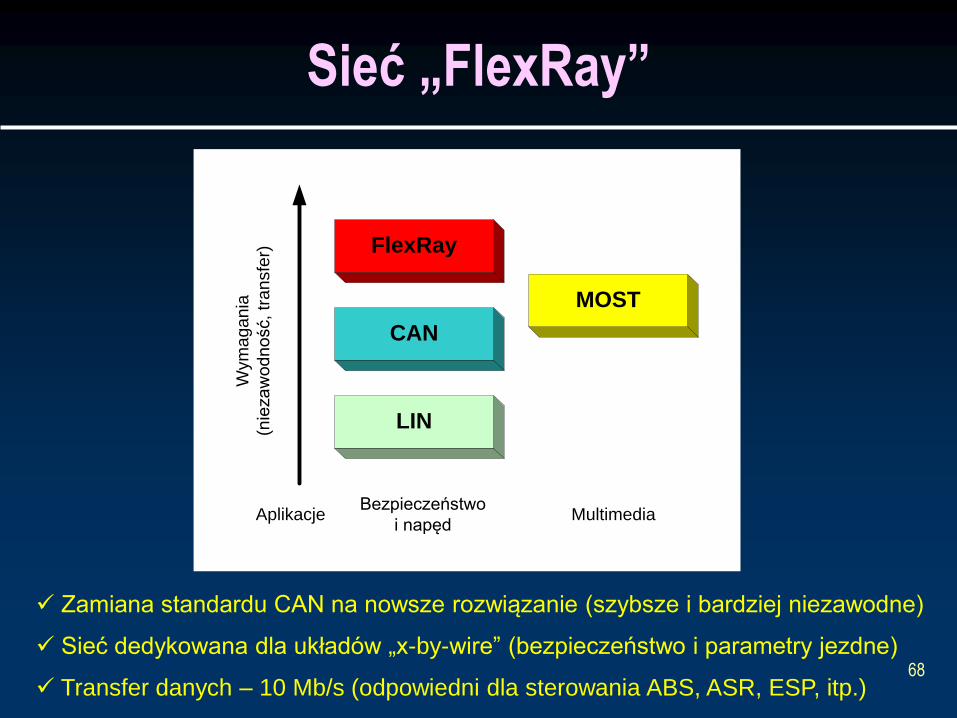
Sieć „FlexRay”
Wym
ag
an
ia
(nie
za
wo
dn
ość, tr
an
sfe
r)
Aplikacje MultimediaBezpieczeństwo
i napęd
FlexRay
CAN
LIN
MOST
Zamiana standardu CAN na nowsze rozwiązanie (szybsze i bardziej niezawodne)
Sieć dedykowana dla układów „x-by-wire” (bezpieczeństwo i parametry jezdne)
Transfer danych – 10 Mb/s (odpowiedni dla sterowania ABS, ASR, ESP, itp.)

69
Sieć „FlexRay”
Komunikacja dwukanałowa (dane priorytetowe – kanał statyczny, inne – dynamiczny)
Wielopoziomowa architektura gwiaździsta
Zastosowanie węzłów aktywnych (łączników) i końcowych
Węzeł
końcowy
Węzeł
„Active Star”

70
„FlexRay” – węzeł aktywny
Główne zadanie – detekcja węzła wysyłającego informację i skierowanie do
odpowiedniego „odbiorcy”
Praca dwukierunkowa – możliwa zamiana układów wyjściowych i wejściowych
Możliwość odłączenia węzła końcowego lub fragmentu sieci
Układ detekcji
trasferu
Układ kontroli
kierunku trasferu
Układ detekcji
trasferu
Układ kontroli
kierunku trasferu
Łącznik „Active Star”
dane
wejściowe
dane
wyjściowe
Blok zasilania

71
„FlexRay” – węzeł końcowy
Każdy węzeł końcowy zawiera dwa
sterowniki magistrali
Blok nadzorujący („bus-guardian”) –
ochrona węzła i sieci przed przepływem
niepożądanych danych
Kontroler komunikacji
Mikrokontroler
(Host)
Bu
s
Gu
ard
ian
Ste
rownik
mag
istral
i
Bu
s
Gu
ard
ian
Blo
k z
as
ila
nia
do sieci
Ste
rownik
mag
istral
i
Węzeł końcowy „Node”

72
„FlexRay” – protokół transmisji
Dystrybucja sygnału zegarowego, jednakowego dla wszystkich węzłów
Likwidacja arbitrażu - synchronizacja transmisji (impulsy SOC) i przydział okien
czasowych dla węzłów
Dane synchroniczne przesyłane w regularnych odstępach czasowych
Dane asynchroniczne przesyłane jedne po drugich niezależnie w obu kanałach
SOC A1 B1 C1 D1 A3
SOC A1 B1 E1D1 A3
D2 C2 A4
B2 E2
SOC
SOC
BUS 0
(stat.)
BUS 1
(dynam.)
Dane synchroniczne Dane asynchroniczne
Przesyłana wiadomość
1 32 4 5 6 7 8 9
1 32 4 5 6 78 9 10
SOC - impulsy synchronizacyjne

73
„FlexRay” – ramka danych
ID – pozycja w części statycznej i priorytet w części dynamicznej
MUX – informacja, że węzeł wysyła różne dane z tym samym ID
SYNC – synchronizacja zegara
LEN – informacja o długosci pola danych
CRC – pole zabezpieczenia (wykrywanie zakłóceń)

74
Sieci bezprzewodowe
Sieci bezprzewodowe są
odpowiedzią na potrzeby
użytkowania osobistych urządzeń
multimedialnych nie
zintegrowanych z pojazdem w
trakcie jego użytkowania.
Wstępne pomysły wykorzystania połączeń
przewodowych i łącz na podczerwień
okazały się zbyt kłopotliwe. Rozwiązaniem
optymalnym okazały się połączenia radiowe
krótkiego zasięgu.

75
Sieć „Bluetooth”
Sieć jest tworzona automatycznie
Częstotliwość podstawowa 2,45GHz
Przepustowość max 1Mbps
Zasięg 10-20m
Struktura komórkowa (max 8 urządzeń aktywnych na jedną komórkę)
48-bitowe unikatowe adresy urządzeń

76
Likwidacja zakłóceń
Podział przesyłanych danych na pakiety trwające 625μs
Pakiety są nadawane w kanałach 1MHz w paśmie 2,4022,480GHz
Kanały są wybierane losowo

77
Prognozy – system DRiVE
Źródło: Bosch

78
Podsumowanie
Sieci informatyczne, dostępne w coraz większej liczbie
samochodów, przyczyniają się zmniejszenia masy pojazdu,
zmniejszenia zużycia paliwa oraz emisji substancji szkodliwych,
dając jednocześnie coraz więcej komfortu i przyjemności z
prowadzenia samochodu.
Komunikacja pomiędzy sterownikami oparta o magistrale
tele- i optoinformatyczne zapewnia zwiększenie niezawodności
pracujących podzespołów oraz bezpieczeństwa kierującego i
pasażerów
Zastosowanie zaawansowanych sieci informatycznych w
motoryzacji umożliwia projektantom nowych samochodów realizacje
nawet najbardziej futurystycznych pomysłów („X-by-wire”, systemy
alarmowe „DRiVE”).
79
Dziękuję za uwagę