projekt manipulatora
24
Politechnika Śląska w Gliwicach Gliwice dn. 03.01.13 r. Wydział Mechaniczny-Technologiczny Kierunek Automatyka i Robotyka Semestr V, Grupa 6 Projekt manipulatora
description
bikairp- opracowany projekt manipulatora SCHUNK
Transcript of projekt manipulatora

Politechnika Śląska w Gliwicach Gliwice dn. 03.01.13 r.Wydział Mechaniczny-TechnologicznyKierunek Automatyka i RobotykaSemestr V, Grupa 6
Projekt manipulatora
Wykonał:Rafał Jurczyk

Spis Treści
1. Założenia projektowo-konstrukcyjne................................................................3
2. Obrabiarki sterowane numerycznie...................................................................4
3.Gniazdo obróbcze...............................................................................................5
4. Zadania do wykonania.......................................................................................6
5.Koncepcje manipulatorów..................................................................................7
6.Kryterialny wybór rozwiązania konstrukcyjnego..............................................8
7.Obliczenia...........................................................................................................9
Masy poszczególnych elementów :................................................................9
Siły działające na układ :................................................................................9
Obliczenia reakcji podpory :........................................................................10
Obliczenia strzałki ugięcia :.........................................................................11
Obliczenia momentu bezwładności dla przekroju ramienia :.......................12
Obliczenia dotyczące przegubu górnego......................................................13
8.Elementy katalogowe.......................................................................................14
Napęd liniowy z śrubą pociągową EGC-BS-KF :........................................14
Elektryczny moduł obrotowy ERMB :.........................................................15
Chwytak HGP z osłoną :..............................................................................16
9.Wnioski............................................................................................................17
2

0,020m
0,03
5m
1. Założenia projektowo-konstrukcyjne
Przedmiotem manipulacji jest półfabrykat w postaci walca o średnicy d i wysokości h.
D=0,020mH=0,035mρ=2720 kg/m3
Obj. walca :
Masa :
3

2. Obrabiarki sterowane numerycznie
Przedmiot jest obrabiany na dwóch tokarko—frezarkach o osi pionowej sterowanych numerycznie.
Frezarka CNC z magazynem narzędzi oraz systemem sterowania CNC Siemens 828 D Sinumerik
typ : centrum pionowe wymiary stołu :1000 x 450 mm przesuw w osi x : 850 mm przesuw w osi y : 500 mm przesuw w osi z : 600 mm prędkość obrotowa wrzeciona : 20 - 10000
obr/min. moc silnika wrzeciona : 12kW (wersja S1:
9kW) magazyn narzędzi : 16 sterowanie : Siemens 828D Sinumerik Operate
Tokarka Optimum CNC ze sterowaniem Siemens 828 Basic T
· Sterowanie CNC Siemens 828 Basic T· Silnik wrzeciona i serwonapędy Siemens· Kompletna okładzina z urządzeń bezpieczeństwa· System chłodzenia· Automatyczne centralne smarowanie· Wysoka prędkość obrotowa· Hydrauliczny uchwyt 160 mm; tym twardych i gładkich szczękach blokowych
Parametry zasilaniaCałkowita moc zainstalowana 18.5 kW 400 V ~50 HzMoc silnika napędu wrzeciona 8 kW (S1 mode 7kW)Oś XPrzesuw 250 mmPrędkość posuwu 15'000 mm / minOś ZPrzesuw 760 mm
4

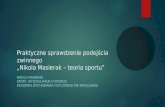
2100mm
Stół
obra
biar
ka 1
obra
biar
ka 2
Prędkość posuwu 15'000 mm / min
3.Gniazdo obróbcze
5

4. Zadania do wykonania
1. Przeprowadzić analizę literaturową oraz internetową: www.gemotec.com, www.gimatic.com, www.norgren.com, www.guedel.com 2. Opracować pole możliwych rozwiązań: przynajmniej trzy różniące się koncepcje: ustroju nośnego i układów napędowych. 3. Metodą optymalizacji punktowej wybrać koncepcję do realizacji. 4. Uszczegółowić cechy konstrukcyjne ustroju nośnego i układów napędowych. 5. Sporządzić rysunek złożeniowy manipulatora. 6. Sporządzić rysunek wykonawczy jednego z elementów manipulatora.
6

1. 2.
3.
5.Koncepcje manipulatorów
7

8

6.Kryterialny wybór rozwiązania konstrukcyjnego
K1 - Minimalna masa manipulatoraK2 - Minimalna długość ruchów jałowychK3 - prostota działania manipulatoraK4 - zapewnienie modułowości mechanizmu ruchu obrotowego i pionowego manipulatoraK5 - błąd pozycjonowania od 0.2 do 1mmK6 - duża sztywność manipulatoraK7 - maksymalny stopien wykorzystania elementów znormalizowanychK8 - Prostota wykonania manipulatoraK9 - Minimalny czas postoju obrabiarek
1 - kryterium wazniejsze0.5 - kryterium tak samo ważne jak porównywane0 - kryterium mniej ważne od porównywanego
1 - rozwiązanie spełnia kryterium w nieznacznym stopniu2 - rozwiązanie spełnia kryterium w umiarkowanym stopniu3 - rozwiązanie spełnia kryterium w pełni
K1 K2 K3 K4 K5 K6 K7 K8 K9 g W1 W2 W3 WiK1 0,5 0,5 0,5 0,5 0,5 0,5 0,5 1 4,5 2 3 2 3K2 0,5 0,5 0,5 0,5 0 0,5 0 1 3,5 1 3 1 3K3 0,5 0,5 0,5 0,5 0,5 0,5 0,5 1 4,5 2 2 3 3K4 0,5 0,5 0,5 0,5 0 1 0,5 1 4,5 2 2 3 3K5 0,5 0,5 0,5 0,5 0,5 1 0 0,5 4 1 2 3 3K6 0,5 1 0,5 1 0,5 1 0 0,5 5 1 3 3 3K7 0,5 0,5 0,5 0 0 0 0 0 1,5 2 2 2 3K8 0,5 1 0,5 0,5 1 1 1 0,5 6 1 3 2 3K9 0 0 0 0 0,5 0,5 1 0,5 2,5 2 2 2 3 z 54 91 87 108 d 0,50 0,84 0,80 1,00
9

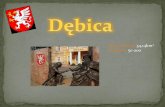
m. ramieniam. napędów
r
R
m. chwytaka
m. przedmiotu
F.cięż
F.bezw.F.odśr.
F.wyp.
7.Obliczenia
Do obliczeń przyjęto :
a = 1 [m/s2]g = 9,81 [m/s2]R = 0,8 [m]r = 0,4 [m]ω = 1,6 [rad/s]k = 2,8 [m/s2]
Masy poszczególnych elementów :
masa chwytaka = 0,266kgmasa przedmiotu = 0,03kgmasa ramienia = 5,604kgmasa napędów = 4,25kg
Siły działające na układ :
Siła odśrodkowa :
Siła ciężkości :
Siła bezwładności :
10

400 400
X
G2 G1
RAY
MA
Siła wypadkowa :
Obliczenia reakcji podpory :
G1 = Ciężar chwytaka i przedmiotuG1 = (Mchw + Mprzed) * g = 2,84NG2 = Ciężar ramienia zrobionego z ceownika aluminiowego wg EN AW 6060/6063G2 = Mram * g = 54,975N
11

12

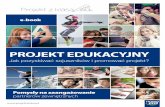
400 400
X
G2 G1
RAY
MA
f
Obliczenia strzałki ugięcia :
13

Moduł Younga [E] dla aluminium wynosi 69GPa = 69000MPa = 69000000000PaRamie zostało skonstruowane poprawnie gdyż ugięcie y=0,0251<1mm
14

b
B
H h
Obliczenia momentu bezwładności dla przekroju ramienia :
15

Obliczenia dotyczące przegubu górnego
Ramię będzie osadzone na osi ustalonej w łożyskach, osadzonych na uchwycie przymocowanym do słupa.
Średnica osi :
Fr=Ra => Ra=57,81NF=2Fb=0.2m
Dla stali St7 kg=200MPa
średnica :
w celu ułatwienia produkcji i zwiekszenia wytrzymałości, średnica osi została powiększona do 10mm.
Obliczenia łożyska :
S0=2 dla pewności współczynnik S0 został dobrany dla dużych wymagań.P0=28,9N
Dobieram łożysko kulkowe zwykłe FAG 6000 gdzie : C=4550NC0=1960Nq=3 (dla łożysk kulkowych)n=30 obr/min
Z racji niskich obciążeń na osi, łożysko zdecydowanie przekracza wymagane 20000h więc spełnia wymagania dotyczące czasu pracy.
Ra Rb
F F
A B
b
16

8.Elementy katalogowe
Napęd liniowy z śrubą pociągową EGC-BS-KF :
17

Elektryczny moduł obrotowy ERMB :
18

Chwytak HGP z osłoną :
19

9.Wnioski
Z powodu wymaganego dużego pola roboczego manipulatora oraz założonej wysokiej sztywności konstrukcja okazała się duża i ciężka.
Zastosowana konstrukcja pozwala na dokładne operowanie, w założonym polu roboczym. Zmieniając napęd liniowy na napęd z większym wysuwem, możemy z łatwością powiększyć obszar roboczy.
Niska strzałka ugięcia powoduje, że spełniony jest istotny warunek o wysokiej sztywności manipulatora i dokładności pozycjonowania.
Większość elementów użytych do zbudowania manipulatora jest znormalizowana, lub umieszczona w katalogach producentów. Powoduje to łatwość wymiany większości elementów, a także wpływa znacząco na koszty produkcji całego manipulatora.
20