PRACA DYPLOMOWA MAGISTERSKA - Laboratorium...
90
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRONIKI KIERUNEK: Automatyka i Robotyka (AiR) SPECJALNOŚĆ: Robotyka (ARR) PRACA DYPLOMOWA MAGISTERSKA WYKRYWANIE I ŚLEDZENIE RUCHU OBIEKTÓW PRZY POMOCY PROSTYCH CZUJNIKÓW ODLEGŁOŚCI OBJECT MOTION DETECTION AND TRACKING WITH SIMPLE DISTANCE SENSORS AUTOR: LESZEK KUBIAK PROWADZĄCY PRACĘ: dr inż. Marek Wnuk, I-6 OCENA PRACY: WROCŁAW 2008
Transcript of PRACA DYPLOMOWA MAGISTERSKA - Laboratorium...

POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRONIKI
KIERUNEK: Automatyka i Robotyka (AiR) SPECJALNOŚĆ: Robotyka (ARR)
PRACA DYPLOMOWA MAGISTERSKA
WYKRYWANIE I ŚLEDZENIE RUCHU OBIEKTÓW PRZY POMOCY PROSTYCH
CZUJNIKÓW ODLEGŁOŚCI
OBJECT MOTION DETECTION AND TRACKING WITH SIMPLE DISTANCE
SENSORS
AUTOR: LESZEK KUBIAK
PROWADZĄCY PRACĘ: dr inż. Marek Wnuk, I-6 OCENA PRACY:
WROCŁAW 2008

2
Dedykuję RODZICOM, cioci JANCE, SIOSTRZE I BRATU

3
Serdecznie dziękuję Panu doktorowi Markowi Wnukowi za umożliwienie podjęcia tematu oraz poświęcony czas i zaangażowanie

4
Dziękuję firmie SICK za udostępnienie czujników do badań Dziękuję firmie GALCHEM za wykonanie galwanizacji elementów składowych stanowiska

5
SPIS TREŚCI 1 Wstęp................................................................................................................................ 11
1.1 Cel pracy .................................................................................................................. 11 1.2 Realizacja ................................................................................................................. 11
2 System śledzenia .............................................................................................................. 14 2.1 Geneza i założenia.................................................................................................... 14 2.2 Zastosowane rozwiązanie......................................................................................... 14 2.3 Budowa mechaniczna............................................................................................... 16 2.4 Część elektroniczna.................................................................................................. 21
2.4.1 Złącza systemu śledzenia ................................................................................. 21 2.4.2 Serwomechanizm ............................................................................................. 21
3 Czujniki optyczne............................................................................................................. 24 3.1 Najważniejsze parametry czujników........................................................................ 24
3.1.1 Zasięg działania................................................................................................ 24 3.1.2 Histereza........................................................................................................... 25 3.1.3 Strefa robocza................................................................................................... 25 3.1.4 Współczynniki korekcyjne............................................................................... 25 3.1.5 Zasilanie ........................................................................................................... 25
3.2 Rodzaje czujników optycznych (fotoprzekaźniki) ................................................... 26 3.2.1 Czujniki optyczne odbiciowe zbliżeniowe (proximity switch)........................ 26 3.2.2 Czujniki optyczne refleksyjne (retro-reflective sensor) ................................... 26 3.2.3 Czujniki optyczne typu bariera (through-beam sensor) ................................... 27
3.3 Wpływ parametrów czujników na pomiary ............................................................. 28 3.3.1 Szerokość wiązki.............................................................................................. 28 3.3.2 Nierównoległość wiązki................................................................................... 29 3.3.3 Źródła promieniowania .................................................................................... 29 3.3.4 Kąt detekcji ...................................................................................................... 30 3.3.5 Modulacja wiązki ............................................................................................. 31
3.4 Czujniki do badań..................................................................................................... 31 3.4.1 Fotoprzekaźnik VTE18-4P8740....................................................................... 32 3.4.2 Fotoprzekaźnik WT18-3N110.......................................................................... 33
4 Sonar................................................................................................................................. 35 5 Urządzenie testujące......................................................................................................... 38
5.1 Konstrukcja mechaniczna ........................................................................................ 40 5.1.1 Układ napędowy............................................................................................... 41 5.1.2 Prowadzenie przewodów.................................................................................. 42 5.1.3 Mocowanie obiektów do badań........................................................................ 43 5.1.4 Zderzak............................................................................................................. 43
5.2 Część elektroniczna.................................................................................................. 44 5.2.1 Silniki ............................................................................................................... 44 5.2.2 Sterownik silników........................................................................................... 46 – Rejestry MD23 ......................................................................................................... 47 – Rejestr komend MD23 ............................................................................................. 48 – Zmiana adresu MD23............................................................................................... 48 5.2.3 Złącze testera.................................................................................................... 49
5.3 Zadawanie ruchu ...................................................................................................... 49 6 Pulpit operatorski ............................................................................................................. 52
6.1 Część mechaniczna .................................................................................................. 52 6.2 Część elektroniczna.................................................................................................. 52
6.2.1 Zasilanie stanowiska laboratoryjnego .............................................................. 52 6.2.2 Płyta główna z mikrokontrolerem ATmega 128 .............................................. 53

6
6.2.3 Układ załączania/wyłączania zasilania urządzenia ruchu................................ 54 – Załączenie zasilania silników................................................................................... 55 – Wyłączenie zasilania silników ................................................................................. 55 6.2.4 Układ konwersji sygnałów z czujników........................................................... 56 6.2.5 Magistrala I2C.................................................................................................. 56 6.2.6 Mini-joystick .................................................................................................... 57 6.2.7 Wyświetlacz LCD ............................................................................................ 58
7 Oprogramowanie.............................................................................................................. 59 7.1 Oprogramowanie dla mikrokontrolera ..................................................................... 59 7.2 Oprogramowanie dla komputera PC........................................................................ 61
8 Eksperymenty................................................................................................................... 65 8.1 Tester........................................................................................................................ 66
8.1.1 Okrąg................................................................................................................ 66 8.1.2 Ósemka............................................................................................................. 67
8.2 Śledzenie .................................................................................................................. 68 8.2.1 Badanie wpływu rodzaju oświetlenia oraz koloru i faktury obiektu na jakość śledzenia.. ......................................................................................................................... 69 8.2.2 Badanie wpływu rozmiaru śledzonego obiektu na jakość śledzenia................ 78 8.2.3 Badanie systemu śledzenia w zależności od różnych ścieżek poruszania się obiektu..... ......................................................................................................................... 80
9 Podsumowanie ................................................................................................................. 82 Literatura .................................................................................................................................. 83 Dodatek A ................................................................................................................................ 84 Dodatek B................................................................................................................................. 88 Dodatek C................................................................................................................................. 89 Dodatek D ................................................................................................................................ 90

7
SPIS RYSUNKÓW RYSUNEK 1 WIDOK STANOWISKA LABORATORYJNEGO.................................................................. 13 RYSUNEK 2 SCHEMAT IDEOWY PROSTEGO SYSTEMU ŚLEDZĄCEGO – RZUTY Z PRZODU I Z GÓRY. .... 15 RYSUNEK 3 SCHEMAT IDEOWY SYSTEMU ŚLEDZĄCEGO. ............................................................... 15 RYSUNEK 4 BIEGUNOWY UKŁAD WSPÓŁRZĘDNYCH SYSTEMU ŚLEDZENIA.. .................................... 16 RYSUNEK 5 MOCOWANIE SYSTEMU ŚLEDZENIA DO TESTERA......................................................... 17 RYSUNEK 6 MOCOWANIE GŁOWICY Z CZUJNIKAMI....................................................................... 17 RYSUNEK 7 WIDOK GŁOWICY SYSTEMU ŚLEDZENIA Z CZUJNIKAMIVTE18.................................... 18 RYSUNEK 8 KONSTRUKCJA GŁOWICY SYSTEMU ŚLEDZENIA Z CZUJNIKAMI VTE18. ....................... 18 RYSUNEK 9 WIDOK GŁOWICY SYSTEMU ŚLEDZENIA Z CZUJNIKAMIWT18. .................................... 19 RYSUNEK 10 KONSTRUKCJA GŁOWICY SYSTEMY ŚLEDZENIA Z CZUJNIKAMI WT18. ....................... 19 RYSUNEK 11 WIDOK CAŁOŚCIOWY SYSTEMU ŚLEDZENIA Z CZUJNIKAMI VTE18. ........................... 20 RYSUNEK 12 WIDOK CAŁOŚCIOWY SYSTEMU ŚLEDZENIA Z CZUJNIKAMI WT18.............................. 20 RYSUNEK 13 ZŁĄCZA SYSTEMU ŚLEDZENIA.................................................................................. 21 RYSUNEK 14 SERWO SG-5010 TOWER PRO................................................................................ 21 RYSUNEK 15 SERWOMECHANIZM – PODSTAWOWE BLOKI FUNKCJONALNE. ................................... 22 RYSUNEK 16 SCHEMAT BLOKOWY SERWOMECHANIZMU............................................................... 22 RYSUNEK 17 A) SYGNAŁ STERUJĄCY, B) POŁOŻENIE WAŁU SILNIKA SERWOMECHANIZMU............... 23 RYSUNEK 18 OGÓLNY SCHEMAT BUDOWY I DZIAŁANIA CZUJNIKA OPTYCZNEGO............................ 24 RYSUNEK 19 IDEA DZIAŁANIA CZUJNIKA ODBICIOWEGO [6]. ....................................................... 26 RYSUNEK 20 IDEA DZIAŁANIA CZUJNIKA REFLEKSYJNEGO [6]. .................................................... 27 RYSUNEK 21 IDEA DZIAŁANIA CZUJNIKA TYPU BARIERA [6]. ........................................................ 27 RYSUNEK 22 WPŁYW SZEROKOŚCI WIĄZKI NA EFEKTYWNĄ SZEROKOŚĆ OBIEKTU [4]. ................... 28 RYSUNEK 23 WPŁYW ROZBIEŻNOŚCI WIĄZKI NA SZEROKOŚĆ PLAMKI. ........................................... 29 RYSUNEK 24 WPŁYW KĄTA DETEKCJI NA CZAS POMIARU.............................................................. 30 RYSUNEK 25 A) WIDOK, B) C) WYMIAR, D) FUNKCJE PINÓW CZUJNIKA VTE18-4P8740 [3]. ........ 32 RYSUNEK 26 A) WIDOK, B) C) WYMIARY CZUJNIKA WT18-3N110 [3]. ......................................... 33 RYSUNEK 27 PINY WT18-3N110. .............................................................................................. 34 RYSUNEK 28 WPŁYW KOLORU NA ZAKRES SKANOWANEJ ODLEGŁOŚCI. ......................................... 34 RYSUNEK 29: WIDOK MODUŁU SONARU SRF08. ........................................................................ 35 RYSUNEK 30: SZEROKOŚĆ WIĄZKI NADAJNIKA SONARU SFR08 [11]. ........................................... 37 RYSUNEK 31 TESTER – RZUTY. ................................................................................................... 39 RYSUNEK 32 KONSTRUKCJA TESTERA W FAZIE BUDOWY. ............................................................ 40 RYSUNEK 33 KĄTOWNIK ALUMINIOWY A) WYMIARY, B) WIDOK.................................................... 40 RYSUNEK 34 WÓZEK Z KOŁNIERZEM A) WIDOK Z PRZODU, B) WIDOK Z BOKU. .............................. 41 RYSUNEK 35 WIDOK PRZEKROJU WÓZKA Z ŁOŻYSKIEM [13]........................................................ 41 RYSUNEK 36 ZĘBATKA A) WYMIARY, B) WIDOK [13]. ................................................................... 42 RYSUNEK 37 A) WYMIARY, B) WIDOK LISTWY ZĘBATEJ [13]. ......................................................... 42 RYSUNEK 38 WIDOK PROWADNIKA PRZEWODÓW SR200. ............................................................ 42 RYSUNEK 39 PROWADNIK PRZEWODÓW SR200 A) WIDOK, B) WYMIARY [13]............................... 43 RYSUNEK 40 WIDOK MOCOWANIA OBIEKTÓW NA RUCHOMYM WÓZKU.......................................... 43 RYSUNEK 41 ZDERZAK A) WIDOK, B) BUDOWA. ........................................................................... 44 RYSUNEK 42 WIDOK SILNIKA EMG30. ....................................................................................... 44 RYSUNEK 43 WYMIARY SILNIKA EMG30 [13]............................................................................. 45 RYSUNEK 44 A) UKŁAD PRZECIWZAKŁÓCENIOWY, B) WIDOK WYPROWADZEŃ SILNIKA. .................. 46 RYSUNEK 45 WIDOK STEROWNIKA MD23 [2]............................................................................. 46 RYSUNEK 46 ROZPLANOWANIE PINÓW ZŁĄCZA DB37 TESTERA. ................................................... 49 RYSUNEK 47 PANEL OPERATORKI – RZUTY.................................................................................. 52 RYSUNEK 48 WIDOK ZASILACZA IMPULSOWEGO.......................................................................... 53 RYSUNEK 49 WIDOK PŁYTY GŁÓWNEJ ATMEGA128. ................................................................... 53

8
RYSUNEK 50 ROZMIESZCZENIE POSZCZEGÓLNYCH ELEMENTÓW NA PŁYTCE DRUKOWANEJ MODUŁU........................................................................................................................................... 54
RYSUNEK 51 SCHEMAT UKŁADU ZAŁĄCZANIA/WYŁĄCZANIA ZASILANIA SILNIKÓW. ......................... 55 RYSUNEK 52 UKŁAD KONWERSJI NAPIĘĆ. ................................................................................... 56 RYSUNEK 53 RAMKA DANYCH PROTOKOŁU I2C. ......................................................................... 57 RYSUNEK 54 JOYSTICK A) WIDOK, B) SYGNAŁY. ........................................................................... 58 RYSUNEK 55 WYŚWIETLACZ LCD 4X16. ..................................................................................... 58 RYSUNEK 56 STEROWNIK – PODSTAWOWE BLOKI. ....................................................................... 59 RYSUNEK 57 STEROWNIK – GŁÓWNE FUNKCJE. .......................................................................... 60 RYSUNEK 58 RAMKA DANYCH PRZESYŁANA PRZEZ MIKROKONTROLER DO PC............................... 60 RYSUNEK 59 OKNO PROGRAMU PC DO WIZUALIZACJI – ZAKŁADKA „RYSUNEK”.......................... 62 RYSUNEK 60 OKNO PROGRAMU PC DO WIZUALIZACJI – ZAKŁADKA „DANE ODCZYTYWANE”. ....... 63 RYSUNEK 61 ZAKŁADKI MENU „USTAWIENIA”. .......................................................................... 64 RYSUNEK 62 POŁOŻENIE ELEMENTÓW SKŁADOWYCH STANOWISKA LABORATORYJNEGO................ 65 RYSUNEK 63 WYNIK EKSPERYMENTU - RUCH PO OKRĘGU............................................................ 66 RYSUNEK 64 WYNIK EKSPERYMENTU – RUCH PO ÓSEMCE. .......................................................... 67 RYSUNEK 65 UKŁADY WSPÓŁRZĘDNYCH TESTERA (XTOYT) I SYSTEMU ŚLEDZENIA (XSOYS). ........ 68 RYSUNEK 66 ŚLEDZENIE OBIEKTU W KOLORZE BIAŁYM, O MATOWEJ POWIERZCHNI ORAZ ŚWIETLE A)
DZIENNYM, B) STROBOSKOPOWYM. ...................................................................................... 69 RYSUNEK 67 ŚLEDZENIE OBIEKTU W KOLORZE NIEBIESKIM, O MATOWEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 70 RYSUNEK 68 ŚLEDZENIE OBIEKTU W KOLORZE CZERWONYM, O MATOWEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 70 RYSUNEK 69 ŚLEDZENIE OBIEKTU W KOLORZE CZARNYM, O MATOWEJ POWIERZCHNI ORAZ ŚWIETLE
A) DZIENNYM, B) STROBOSKOPOWYM. .................................................................................. 71 RYSUNEK 70 ŚLEDZENIE OBIEKTU W KOLORZE BIAŁYM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 71 RYSUNEK 71 ŚLEDZENIE OBIEKTU W KOLORZE NIEBIESKIM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 72 RYSUNEK 72 ŚLEDZENIE OBIEKTU W KOLORZE CZERWONYM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 72 RYSUNEK 73 ŚLEDZENIE OBIEKTU W KOLORZE CZARNYM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 73 RYSUNEK 74 ŚLEDZENIE OBIEKTU W KOLORZE BIAŁYM, O MATOWEJ POWIERZCHNI ORAZ ŚWIETLE A)
DZIENNYM, B) STROBOSKOPOWYM. ...................................................................................... 73 RYSUNEK 75 ŚLEDZENIE OBIEKTU W KOLORZE NIEBIESKIM, O MATOWEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 74 RYSUNEK 76 ŚLEDZENIE OBIEKTU W KOLORZE CZERWONYM, O MATOWEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 74 RYSUNEK 77 ŚLEDZENIE OBIEKTU W KOLORZE CZARNYM, O MATOWEJ POWIERZCHNI ORAZ ŚWIETLE
A) DZIENNYM, B) STROBOSKOPOWYM. .................................................................................. 75 RYSUNEK 78 ŚLEDZENIE OBIEKTU W KOLORZE BIAŁYM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 75 RYSUNEK 79 ŚLEDZENIE OBIEKTU W KOLORZE NIEBIESKIM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 76 RYSUNEK 80 ŚLEDZENIE OBIEKTU W KOLORZE CZERWONYM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 76 RYSUNEK 81 ŚLEDZENIE OBIEKTU W KOLORZE CZARNYM, O BŁYSZCZĄCEJ POWIERZCHNI ORAZ
ŚWIETLE A) DZIENNYM, B) STROBOSKOPOWYM...................................................................... 77 RYSUNEK 82 ŚLEDZENIE WALCA O ŚREDNICY 75MM A) RUCH W LEWO, B) RUCH W PRAWO. ........... 78 RYSUNEK 83 ŚLEDZENIE WALCA O ŚREDNICY 110MM A) RUCH W LEWO, B) RUCH W PRAWO. ......... 78 RYSUNEK 84 ŚLEDZENIE WALCA O ŚREDNICY 160MM A) RUCH W LEWO, B) RUCH W PRAWO .......... 79

9
RYSUNEK 85 ŚLEDZENIE PROSTEJ. PARAMETRY: AX=100MM, AY=200MM, NX=1, NY = 1, Ψ = Π/2, T = 30S.............................................................................................................................. 80
RYSUNEK 86 ŚLEDZENIE OKRĘGU O PROMIENIU 100MM. AX=100MM, AY=100MM, NX=1, NY = 1, Ψ = 0, T = 30S. .................................................................................................................. 80
RYSUNEK 87 ŚLEDZENIE ÓSEMKI. AX=100MM, AY=200MM, NX=1, NY = 2, Ψ = 0, T = 30S........ 81 RYSUNEK 88 ŚLEDZENIE KRZYWEJ SINUSOIDALNEJ. AX=100MM, AY=200MM, NX=2, NY = 1, Ψ =
0, T = 30S. ......................................................................................................................... 81

10
SPIS TABEL TABELA 1: PARAMETRY SG-5010 ............................................................................................... 23 TABELA 2: FUNKCJE REJESTRÓW SFR08. ................................................................................... 35 TABELA 3: WARTOŚCI INICJUJĄCE POMIAR. ................................................................................ 36 TABELA 4: POBÓR PRĄDU SFR08. ............................................................................................. 37 TABELA 5: ZNACZENIE PRZEWODÓW SILNIKA EMG30................................................................. 45 TABELA 6: SPECYFIKACJA SILNIKA.............................................................................................. 45 TABELA 7: REJESTRY MD23. ..................................................................................................... 47 TABELA 8: REJESTR KOMEND MD23 .......................................................................................... 48 TABELA 9: SYGNALIZACJA USTAWIENIA ADRESU I2C. .................................................................. 48 TABELA 10: PARAMETRY TECHNICZNE ZASILACZA ....................................................................... 53 TABELA 11: ZALEŻNOŚĆ REZYSTANCJI OD WYCHYLENIA GAŁKI JOYSTICKA. ................................... 58 TABELA 12: PARAMETRY KRZYWEJ LISSAJOUS. ............................................................................ 66 TABELA 13: PARAMETRY KRZYWEJ LISSAJOUS. ............................................................................ 67

11
1 Wstęp
W dzisiejszych czasach czujniki, podobnie jak elektronika, są wszechobecne. Począwszy od prostych urządzeń codziennego użytku, kończąc na zaawansowanych urządzeniach wykorzystywanych przez wojsko – czujniki znalazły zastosowanie praktycznie w każdej dziedzinie życia; tam gdzie istnieje potrzeba wykrywania zmian różnych wielkości w otaczającym nas środowisku. Jednym z podstawowych zadań jakie stawia się czujnikom jest wykrywanie obiektów w polu ich działania. Czujnikami znajdującymi tu zastosowanie są czujniki optyczne, ultradźwiękowe itp. Mianem obiektu w dalszej części pracy będzie określany przedmiot o określonych rozmiarach, teksturze oraz kolorze.
1.1 Cel pracy
Bardzo często istnieje potrzeba nie tylko wykrywania obiektów, ale też śledzenia ich ruchu. Do tego celu najszersze zastosowanie znajdują różnego rodzaju kamery, systemy wizyjne. Jednak ilość informacji dostarczana z takiej kamery wymaga dużych nakładów obliczeniowych oraz często skomplikowanych algorytmów, aby uzyskać informację dla nas interesującą. Dodatkowo koszty profesjonalnych systemów wizyjnych są znaczne. Tu wyłania się potrzeba stworzenia systemu, który umożliwiłby wykrywanie i śledzenie obiektu przy zastosowaniu prostych czujników. Pisząc „prostych” mamy na myśli takich, które podają minimalną potrzebną informację o obiekcie. Taki system powinien być tani w realizacji i stosować proste algorytmy (niskie nakłady obliczeniowe) umożliwiające śledzenie obiektu. Celem pracy jest zbudowanie takiego systemu śledzącego ruchomy obiekt z zastosowaniem jedynie czujników odległości. W projekcie śledzenie obiektu ograniczone zostało do śledzenia w przestrzeni dwuwymiarowej. Dodatkowo w pracy założono zbudowanie urządzenia, które ma umożliwić rzetelne sprawdzenie skuteczności zbudowanego systemu.
1.2 Realizacja
Realizacja powyższych założeń powinna być poprzedzona wcześniejszą analizą oraz wyborem odpowiednich czujników odległości. Przy wyborze kierowano się przede wszystkim skutecznością wykrywania obiektów o różnych własnościach fizycznych (kolor, chropowatość) oraz odpornością na zakłócenia (oświetlenie). Dla celów porównawczych i badawczych wybrano też zestaw czujników o gorszych własnościach. W oparciu o wybrane czujniki przedstawiono konstrukcję prostego systemu śledzącego na płaszczyźnie poziomej składającego się z czujników optycznych i sonaru. Poszukiwanie skutecznego systemu śledzącego pociąga za sobą wybór sposobu w jaki system ten będzie testowany. Tu pojawia się potrzeba zbudowania urządzenia do zadawania ruchu w płaszczyźnie poziomej XY. W rozdziale 5 przedstawiono konstrukcję mechaniczną i sterowanie testerem. Wszystkie badania skuteczności działania systemu śledzącego przeprowadzone zostały w oparciu o zaprojektowane urządzenie i analizę ścieżek (rzeczywistej oraz widzianej przez system) poruszającego się obiektu. W pracy rozważane są głównie optyczne czujniki odległości w połączeniu z sonarem. W początkowych rozdziałach przedstawiono rodzaje czujników optycznych i poglądową zasadę

12
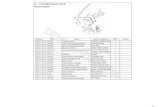
ich działania. Następnie przedstawiono najważniejsze parametry czujników oraz ich wpływ na pomiary. Na koniec rozdziału dotyczącego systemu śledzenia zamieszczono typy czujników, które będą przedmiotem badań i eksperymentów w śledzeniu obiektów. W rozdziale 5 przedstawiono zbudowane urządzenie, które posłużyło do testowania systemu śledzącego. To właśnie urządzenie pochłonęło najwięcej czasu zarówno pod względem stworzenia odpowiedniej konstrukcji, jak i oprogramowania. Dopiero zakończenie prac przy jego budowie pozwoliło na podjęcie prac nad konstruowaniem systemu śledzącego i wykonanie stosownych eksperymentów. Na rysunku 1 przedstawiono końcowy efekt prac nad stanowiskiem laboratoryjnym.

13
Rys
unek
1 W
idok
stan
owis
ka la
bora
tory
jneg
o.

14
2 System śledzenia
Mianem systemu śledzenia określamy system, umożliwiający wykrycie żądanego obiektu a następnie śledzenie określonych jej parametrów. W przypadku systemu śledzenia zbudowanego na potrzeby stanowiska laboratoryjnego obiektem, który należało wykryć był przedmiot o kształcie walca o ustalonych gabarytach, teksturze oraz kolorze. Parametrem śledzonym było jego położenie.
2.1 Geneza i założenia
Geneza zbudowanego systemu śledzenia związana jest z chęcią stworzenia prostego systemu namierzania dla robota sumo. Umiejętność precyzyjnego podążania za obiektem jest kluczowym modułem funkcjonalnym w takim robocie. Powinien on zapewniać znalezienie obiektu tzn. robota-przeciwnika, określenie kierunku jego ruchu oraz dodatkowo odległości od bieżącego położenia naszego robota, aby w ten sposób móc podążać w odpowiednim kierunku i z odpowiednią prędkością, uzależnioną od algorytmu walki), w celu zepchnięcia przeciwnika z dohyo. Jednocześnie system taki powinien być niewielkich rozmiarów oraz cechować się małą masą. Jednym z głównych założeń przy budowie systemu było wykluczenie wszelkich kamer i systemów wizyjnych, tak aby system mógł być obsługiwany poprzez prosty mikrokontroler a zakres dostarczanej informacji był minimalny. Główne założenia jakie postawiono dla systemu śledzenia to:
a) wykrywanie obiektów w przestrzeni dwuwymiarowej; b) nie stosowanie systemów wizyjnych; c) proste algorytmy sterowania; d) minimalny wektor danych o obiekcie; e) możliwość określenia kierunku poruszania się obiektu (w lewo, w prawo, zbliża się,
oddala, nieruchomy); f) możliwość określenia odległości w jakiej znajduje się śledzony obiekt; g) zakres śledzenia w promieniu do 1 metra; h) kąt skanowania otoczenia ±90˚.
Ze względu na gabaryty urządzenia zbudowanego specjalnie do celów testowanie skuteczności śledzenia prostych systemów namierzania powyższe założenia przyjęto dla systemu śledzenia opisanego w pracy.
2.2 Zastosowane rozwiązanie
Intuicyjny jest fakt, iż do wykrywania kierunku ruchu na płaszczyźnie poziomej należy użyć przynajmniej dwa detektory, które będą obserwowały obiekt z dwóch różnych punktów, z wykluczeniem punktów leżących jeden nad drugim. W przypadku informacji analogowej zwracanej z rozmieszczonych w ten sposób czujników mamy wystarczającą porcję danych do określenia zarówno kierunku, jak i odległości poruszającego się przedmiotu. Jeżeli detektory kierunku ruchu zwracają wartość cyfrową o obiekcie, wówczas nie mamy informacji o odległości, a więc zachodzi potrzeba zastosowania dodatkowego dalmierza.

15
W pracy, przy budowie systemu śledzącego wykorzystano drugie rozwiązanie. Na wybór tej opcji miał wpływ szereg aspektów. Głównie chciano wykorzystać czujniki stosowane w automatyce przemysłowej (rozdział 3.4), a tu czujniki cyfrowe mają mniejsze rozmiary oraz posiadają niewielką masę (do 200g). Są one też łatwiejsze do pozyskania. Dość ważną rolę odegrała tu również cena (różnica cen czujników cyfrowych i analogowych to co najmniej kilkaset złotych). Jako dodatkowy dalmierz wykorzystano sonar umieszczony pomiędzy czujnikami do wykrywania kierunku ruchu. Rysunki 2 i 3 przedstawiają ideę opisywanego systemu.
Rysunek 2 Schemat ideowy prostego systemu śledzącego – rzuty z przodu i z góry. 1-czujnik optyczny,
2-sonar, 3-mocowanie czujników i sonaru, 4-serwo.
Rysunek 3 Schemat ideowy systemu śledzącego. 1-system śledzący, 2-szyna danych, 3-sterowanie przez
mikrokontroler, 4-wiązka światła czujnika cyfrowego, 5-wiązka ultradźwiękowa sonaru.

16
Informacja dostarczana przez system śledzenia (rysunek 3) o obiekcie to odległość i kąt obrotu (orientacja) głowicy z czujnikami względem korpusu. W projekcie przyjęto, że kąt podawany będzie z zakresu 0-180˚, gdzie 0˚ - głowica obrócona o 90˚ w prawo, 180˚ - głowica obrócona o 90˚ w lewo. W takim systemie położenie znalezionego obiektu jest podawane we współrzędnych biegunowych (R, α) (rysunek 4).
Rysunek 4 Biegunowy układ współrzędnych systemu śledzenia..
2.3 Budowa mechaniczna Spełnienie założeń dla systemu śledzenia wymienionych w rozdziale 2.1 było poprzedzone wykonaniem projektu w programie ADAMS-View udostępnionym w pracowniach laboratoryjnych dzięki uprzejmości Wydziału Mechanicznego Politechniki Wrocławskiej. Program służy do tworzenia i symulowania rzeczywistych systemów mechanicznych. Przy tworzeniu konstrukcji mechanicznej pod uwagę brana była dostępność posiadanych już wcześniej czujników i dalmierza oraz możliwa prostota. Wszędzie tam, gdzie było to możliwe stosowano części wykonane z aluminium. Związane to było z chęcią zbudowania wytrzymałej konstrukcji przy jednoczesnym zachowaniu niewielkiej masy. W końcowej fazie budowy, elementy aluminiowe systemu śledzenia zostały poddane galwanizacji w firmie Galchem w Ostrowie Wielkopolskim1, w celu zapewnienia ochrony przed efektami starzenia oraz uzyskania dodatkowego efektu wizualnego. W początkowych rozważaniach system miał być zintegrowany z systemem testującym (rozdział 5) oraz panelem sterującym (rozdział 6). Jednak z czasem okazało się, iż taki układ miałby dość wąskie zastosowanie – testowanie tylko systemu namierzania zbudowanego na potrzeby tego projektu – brak możliwości użycia systemu do innych celów. Tu pojawiła się konieczność odpowiedniego zaprojektowania całego stanowiska, w tym także systemu śledzenia. Rysunek 5 przedstawia zastosowane mocowania, umożliwiające zintegrowanie systemu śledzenia z pozostałą częścią stanowiska na czas przeprowadzania eksperymentów. Dodatkowo mocowania pozwalają na przeprowadzanie testów zawsze dla tego samego umiejscowienia korpusu systemu śledzenia – zapewnienie identycznych warunków podczas eksperymentów.
1 Serdeczne podziękowania firmie Galchem z Ostrowa Wielkopolskiego za nieodpłatne wykonanie galwanizacji.

17
Rysunek 5 Mocowanie systemu śledzenia do testera.
Kolejnym celem przy konstruowaniu systemu namierzania było zaprojektowanie urządzenia w sposób, który umożliwiłby łatwą i szybką wymianę głowic z czujnikami. Zastosowane rozwiązanie przedstawia rysunek 6. Dwa symetrycznie rozmieszczone kołki o wysokości 2 mm w odpowiedniej podstawce służą do precyzyjnego (powtarzalnego) umieszczenia głowicy, która zostaje dodatkowo dokręcona podłużną nakrętką (rysunek 6b). Dzięki temu osoba przeprowadzająca eksperyment nie potrzebuje żadnych dodatkowych narzędzi do zmiany czujników, a co za tym idzie, nie musi rozpraszać się i tracić czasu przy montażu. W badanym systemie śledzenia sonar przytwierdzony jest do konstrukcji na stałe – wymianie ulegają jedynie czujniki optyczne.
Rysunek 6 Mocowanie głowicy z czujnikami. 1-podstawa dla czujników
2-kołki naprowadzające, 3-śruba z nakrętką. Na potrzeby stanowiska skonstruowano dwa typy głowic z czujnikami, które przedstawiają rysunki 7, 8, 9, 10.

18
Rysunek 7 Widok głowicy systemu śledzenia z czujnikamiVTE18.
Rysunek 8 Konstrukcja głowicy systemu śledzenia z czujnikami VTE18.
1-sonar, 2-podstawka z prowadzeniami kołkowymi, 3-serwomechanizm, 4-czujnik VTE18, 5-śruba mocująca.

19
Rysunek 9 Widok głowicy systemu śledzenia z czujnikamiWT18.
Rysunek 10 Konstrukcja głowicy systemy śledzenia z czujnikami WT18. 1-czujnik WT18.

20
Rysunek 11 Widok całościowy systemu śledzenia z czujnikami VTE18.
Rysunek 12 Widok całościowy systemu śledzenia z czujnikami WT18.

21
2.4 Część elektroniczna
Część elektroniczna systemu śledzenia jest bardzo prosta, ze względu na umieszczenie większości elektroniki w panelu sterowania. W rozdziale przedstawiono opis serwomechanizmu oraz zastosowanego złącza do połączenia z panelem sterującym.
2.4.1 Złącza systemu śledzenia Zintegrowanie systemu śledzenia z panelem operatorskim (doprowadzenie zasilań, sygnałów sterujących) zrealizowane zostało poprzez 20-pinowe złącze. Tu następuje rozdział sygnałów do trzech złączy – 6-pinowe dla czujników, 4-pinowe dla sonaru oraz 3-pinowe dla serwomechanizmu. Rysunek 13 przedstawia rozplanowanie pinów w obudowie.
Rysunek 13 Złącza systemu śledzenia.
2.4.2 Serwomechanizm Jako napęd umożliwiający zmianę orientacji oczujnikowanej głowicy w celu podążania za ruchem śledzonego obiektu, zastosowano serwomechanizm SG-5010 firmy Tower Pro (rysunek 14).
Rysunek 14 Serwo SG-5010 Tower Pro.

22
Zakup odpowiedniego serwa poprzedzony był rozważaniami nad parametrami jakimi powinno się ono cechować. Produkowane są serwomechanizmy różnych typów: od potężnych urządzeń do zastosowań przemysłowych, skomplikowanych siłowników napędzających stery samolotów, aż po proste i tanie serwa modelarskie.
Rysunek 15 Serwomechanizm – podstawowe bloki funkcjonalne.
Serwomechanizm modelarski składa się z następujących bloków funkcjonalnych [10] (rysunek 15):
– Silnika napędowego. Jest to silnik komutatorowy prądu stałego, pracujący w zakresie napięć od 4,8 do 6VDC. Pomimo niepozornych wymiarów silnik taki wyróżnia się bardzo starannym wykonaniem i bardzo wielką sprawnością. Zastosowanie takiego właśnie silnika jest konieczne, ponieważ serwo musi pracować z dużą prędkością i jednocześnie wytwarzać duży moment obrotowy, czyli spełniać dwa, sprzeczne ze sobą warunki.
– Przekładni mechanicznej. Jest to po prostu zespół kółek zębatych wykonanych najczęściej z wysokiej jakości tworzywa sztucznego. Zadaniem przekładni jest redukcja wysokich obrotów silnika i zapewnienie dużego momentu obrotowego serwa.
– Potencjometru osadzonego bezpośrednio na wale napędzającym mechanizmy wykonawcze. Napięcie suwaka potencjometru jest ściśle proporcjonalne do kąta pod jakim aktualnie ustawiony jest wał sterujący mechanizmem wykonawczym.
– Układu elektronicznego zrealizowanego z zasady na jednym, wyspecjalizowanym układzie scalonym. Zadaniem sterownika serwa jest porównanie napięcia otrzymywanego z potencjometru z napięciem otrzymanym po przetworzeniu informacji podanej na wejście układu (np. z odbiornika radiowego) i takie sterowanie kierunkiem obrotów silnika, aby te napięcia były równe. Jest to klasyczny przykład sprzężenia zwrotnego (najczęściej regulacja P).
Rysunek 16 Schemat blokowy serwomechanizmu.

23
Na rysunku 16 pokazano schemat blokowy serwomechanizmu [10], ale dla nas najbardziej interesująca będzie informacja o rodzaju sygnału wejściowego, jaki musi zostać dostarczony na wejście serwa. Przebieg sygnału sterującego standardowego serwa (SG-5010) został przedstawiony na rysunku 17a (obok – rysunek 17b – położenie serwa dla zadanego sygnału).
Rysunek 17 a) Sygnał sterujący, b) położenie wału silnika serwomechanizmu.
Jak widać na powyższym rysunku, sterowanie serwem odbywa się przez wysyłanie w odstępach ok. 20ms krótkich impulsów dodatnich o czasie trwania od 1ms do 2ms. To właśnie czas trwania tych impulsów decyduje o wartości napięcia porównywanego z napięciem otrzymywanym z potencjometru pomiarowego.
Tabela 1: Parametry SG-5010 Parametr Wartość Moment 51N·cm (dla 4.8V); 63.5N·cm (dla 6V)
Czas obrotu wału pomiędzy skrajnymi położeniami 0.2s (dla 4.8V); 0.16s (dla 6V)
Sygnał sterujący 1-2ms Rozdzielczość 20μs
Wymiary 40x20x36.5mm Masa 48g
Zastosowany w projekcie serwomechanizm jest urządzeniem podwójnie łożyskowanym, co zwiększa jego wytrzymałość. Jedyną wadą może być zastosowanie zębatek z tworzywa sztucznego w przekładni. Jednak SG-5010 dla potrzeb systemu śledzenia jest w zupełności wystarczające.

24
3 Czujniki optyczne
Na wstępie rozdziału opisano podstawowe rodzaje sensorów optycznych i parametry jakie je charakteryzują. Czujniki optyczne są elementami, których działanie opiera się na zasadzie wysyłania wiązki promieni świetlnych przez nadajnik i ich odbieraniu przez odbiornik. Pomiar odległości w czujnikach optycznych może być realizowany na dwa sposoby. Pierwszy polega na pomiarze poziomu światła jaki powróci do odbiornika. Jest on przetwarzany poprzez odpowiedni fotoelement na sygnał elektryczny (prądowy lub napięciowy) [5]. Taka metoda pomiarowa dotyczy czujników zwanych fotoprzekaźnikami. Charakteryzują się one tym, że nie zwracają informacji w postaci analogowej, ale cyfrowej – obiekt wykryty lub brak obiektu. Ogólną zasadę działania czujnika przedstawia rysunek 18.
Rysunek 18 Ogólny schemat budowy i działania czujnika optycznego.
Druga metoda pomiaru odległości jest podobna do pomiaru odległości w sonarach, tzn. mierzony jest czas potrzebny na przebycie drogi przez światło od czujnika do obiektu i z powrotem. Ponieważ prędkość światła jest stała w danym ośrodku, dlatego odległość może zostać obliczona na podstawie czasu potrzebnego na przebycie drogi. Zaletą tej metody pomiaru są o wiele większe zakresy pomiarowe. Wadą jest to, że czas przelotu wiązki światła od momentu wysłania do momentu detekcji przez fotoelement jest bardzo krótki; dla przykładu: dla odległości 1m wynosi nieco ponad 6,5ns, a zatem wymaga bardzo precyzyjnych systemów odliczania czasu.
3.1 Najważniejsze parametry czujników
Poniżej przedstawiono kilka najważniejszych parametrów związanych czujnikami optycznymi. Mają one istotny wpływ na skuteczność wykrywania obiektów.
3.1.1 Zasięg działania Jest to maksymalna odległość od czoła czujnika, która zapewnia poprawne jego działanie w warunkach przerwania promienia świetnego przez obiekt znajdujący się wewnątrz zasięgu [6]. Często spotyka się czujniki optyczne, które posiadają regulowaną strefę działania poprzez odpowiedni potencjometr wieloobrotowy, aby dostosować ten parametr do konkretnej aplikacji.

25
3.1.2 Histereza Działanie czujników optycznych charakteryzuje występowanie histerezy przełączania, którą jest różnica odległości obiektu od czujnika, przy których zmienia on stan obwodu wyjściowego. Obecność histerezy zapewnia brak oscylacji przełączania wyjścia czujnika przy wchodzeniu/wychodzeniu obiektu z zasięgu działania. Parametr ten jest bardzo ważny przede wszystkim w fotoprzekaźnikach.
3.1.3 Strefa robocza Jest to bezpieczny przedział odległości, w której czujnik „widzi” obiekt [6]. Zależy ona od wielkości obiektu, barwy i faktury powierzchni oraz kąta pod którym obiekt jest widziany przez czujnik.
3.1.4 Współczynniki korekcyjne Istotny wpływ na strefę działania czujnika optycznego ma stopień odbicia światła przez obiekt. Zależy ona od rodzaju materiału, z którego obiekt jest wykonany, od jego barwy, struktury i wymiarów [6]. Można się domyślać, że jasne powierzchnie, np. biała kartka papieru odbija światło silniej niż ciemna. Stąd dla czujników podaje się tzw. współczynniki korekcyjne, które pozwalają na podstawie nominalnych stref działania określić nowe strefy działania w zależności od różnych obiektów (ich barwy, struktury). Niżej podano standardowe współczynniki korekcyjne dla różnych materiałów, uwzględniające właściwości odbicia światła [6]:
− Papier biały matowy: 1.0 − Metal błyszczący: 1.2 – 1.6 − Aluminium czarne eloksalowane: 1.2 – 1.8 − Styropian biały: 1.0 − PCW szare: 0.5 − Karton czarny błyszczący: 0.3 − Karton czarny matowy: 0.1 − Drewno surowe: 0.4
3.1.5 Zasilanie O poprawnej pracy czujników optycznych w dużej mierze decyduje zasilanie. Sensory (głównie te stosowane w automatyce) można zasilać napięciem stałym stabilizowanym lub niestabilizowanym. Przy zasilaniu napięciem niestabilizowanym tętnienia napięcia nie mogą przekraczać 10% [6]. Zazwyczaj napięcie zasilania czujników stosowanych w systemach automatyki mieści się w zakresie 10-30V DC. Dla czujników stosowanych do celów nieprzemysłowych napięcie zasilania to 5V DC.

26
3.2 Rodzaje czujników optycznych (fotoprzekaźniki)
3.2.1 Czujniki optyczne odbiciowe zbliżeniowe (proximity switch) Na rysunku 19 przedstawiono ideę działania czujnika odbiciowego. Czujnik charakteryzuje się tym, że nadajnik i odbiornik umieszczone są we wspólnej obudowie [5]. Zasada działania czujnika bazuje na odbiciu promienia świetlnego od powierzchni przedmiotu wykrywanego. Reagują na obiekty wprowadzane w strefę działania czujnika.
Rysunek 19 Idea działania czujnika odbiciowego [6].
W momencie zbliżania przedmiotu do strefy roboczej wygenerowane przez diodę nadawczą pulsujące promieniowanie podczerwone odbija się od niego i jest odbierane przez fototranzystor. Promieniowanie pulsujące stosuje się w celu wyeliminowania możliwości zakłóceń światłem obcym. Elektroniczny układ odbiorczy reaguje tylko na światło pulsujące o określonej częstotliwości. Zaletą optycznych czujników odbiciowych jest umieszczenie w jednej obudowie zarówno odbiornika, jak i nadajnika, co zapewnia prosty montaż, regulację i ogromne możliwości stosowania tych czujników. Dodatkowo na ogół wyposażone są one w układ eliminacji wpływu oświetlenia tła, co sprawia, że czujniki takie praktycznie wykrywają jednakowo obiekty zarówno jasne, jak i ciemne, a ich strefa działania jest precyzyjnie regulowana (nawet z dokładnością do 0.1mm). Sensory odbiciowe są niezastąpione przy wykrywaniu obiektu przemieszczającego się w pobliżu tła lub podłoża, którego czujnik nie powinien wykrywać. Do wad czujników tego typu należy zaliczyć wrażliwość na kolor przedmiotów wykrywanych. Jednak i tak bardzo dobrze spełniają swoje zadanie przy wykrywaniu detali ze szkła i materiałów transparentnych.
3.2.2 Czujniki optyczne refleksyjne (retro-reflective sensor) Nadajnik i odbiornik umieszczone są we wspólnej obudowie i skierowane na element odblaskowy, od którego odbija się wysłana przez nadajnik wiązka promieni świetlnych [5] (rysunek 20). Przesłonięcie wiązki przez obiekt powoduje przerwanie transmisji i uaktywnienie sensora.

27
Rysunek 20 Idea działania czujnika refleksyjnego [6].
Czujniki optyczne refleksyjne wymagają montażu reflektora umieszczonego na osi wiązki optycznej wysyłanej przez optoelement. Wykrywają obiekty pojawiające się między czujnikiem a lusterkiem. Zaletą tych czujników jest większy zasięg (nawet do 12 metrów), w porównaniu z czujnikami optycznymi odbiciowymi oraz brak wrażliwości na kolor obiektu. Czujnik refleksyjny, w odróżnieniu od czujnika odbiciowego daje informację o tym, że obiekt zostaje wykryty, gdy wiązka promienia świetlnego nie powraca do odbiornika (jest rozpraszana przez obiekt).
3.2.3 Czujniki optyczne typu bariera (through-beam sensor) Czujniki optyczne typu bariera (rysunek 21) składają się z dwóch niezależnie zasilanych elementów: nadajnika i odbiornika. Usytuowane są wzdłuż jednej osi wyznaczonej przez wiązkę nadajnika [5].
Rysunek 21 Idea działania czujnika typu bariera [6].
Czujniki wykrywają obiekty pojawiające się między nadajnikiem a odbiornikiem. Posiadają one najdłuższe strefy działania w porównaniu z czujnikami odbiciowymi i refleksyjnymi (nawet do 50 metrów).

28
3.3 Wpływ parametrów czujników na pomiary
3.3.1 Szerokość wiązki W szerokiej gamie dostępnych czujników optycznych można zauważyć podział ze względu na szerokość emitowanej wiązki promieniowania [4]. Szerokość wiązki wysyłanej przez czujnik ma istotny wpływ na wykrywanie obiektów. Dla czujników, w których jako źródło światła stosuje się diody na podczerwień lub żarówki szerokość wiązki wynosi od kilku (nawet kilkunastu) milimetrów. W przypadku, gdy źródłem światła jest laser, szerokość wiązki wynosi do w przybliżeniu 0.5mm. Aby lepiej zobrazować wpływ tego parametru na wykrywanie obiektu na rysunku 22 przedstawiono kolejne fazy poruszającego się przedmiotu przy założeniu, że 25-procentowe zakrycie promienia powoduje zmianę stanu czujnika. W przykładzie pominięto nierównoległość wiązki (patrz podrozdział 3.3.2).
Rysunek 22 Wpływ szerokości wiązki na efektywną szerokość obiektu [4].
Jak widać z rysunku 22 droga, na której na wyjściu czujnika jest stan wysoki, zwiększa się o pewną część szerokości wiązki LΔ zgodnie z poniższym wzorem: ( ) DkLLLL ⋅−+=Δ+= 210 (1)
gdzie: L – efektywna szerokość obiektu;
0L – rzeczywista szerokość obiektu; D – średnica wiązki promieniowania; k – stopień zakrycia wiązki powodujący zmianę stanu na wyjściu czujnika. Wielkość zależy od progu czułości k detektora w czujniku. Gdyby założyć, że , to szerokość obiektu zwiększa się o szerokość D wiązki. Rozważając inny skrajny przypadek, w którym , można zauważyć, że efektywna szerokość obiektu zmniejsza się o szerokość wiązki D.
0→k
1→k

29
To narzuca nam warunek, iż szerokość obiektu nie może być mniejsza od szerokości wiązki. Niespełnienie tego warunku może spowodować, że obiekt nie zostanie zauważony. Na podstawie zależności (1) można wywnioskować, że najmniejszy błąd zmiany szerokości obiektu wprowadza wiązka o 50-procentowym stopniu zakrycia (progu przełączania k). Mimo wszystko występujący tu błąd jest błędem systematycznym, dlatego można go wyeliminować, dokonując odpowiedniej korekty czasu trwania impulsu wyjściowego czujnika.
3.3.2 Nierównoległość wiązki Nierównoległość wiązki powoduje, że plamka, którą przesłania poruszający się obiekt, ma szerokość zależną od odległości czujnika od obiektu [4].
Rysunek 23 Wpływ rozbieżności wiązki na szerokość plamki.
Efektywna szerokość wiązki wyrażona jest wzorem: αtghDD ⋅⋅+= 20 (2)
gdzie: D – efektywna szerokość wiązki;
0D – źródłowa szerokość wiązki; h – odległość czujnika od obiektu; α – kąt rozbieżności wiązki. Na podstawie zależności (2) widać, że średnica plamki świetlnej ściśle zależy od kąta rozbieżności wiązki. Jeśli przywołamy wcześniejszą zależność (1) okazuje się, że efektywna szerokość obiektu jest nie tylko funkcją współczynnika zakrycia k, ale również efektywnej szerokości wiązki. Parametru tego nie można zaniedbać przy wykrywaniu obiektów. Okazuje się jednak, że podobnie jak błąd występujący przy pomiarze efektywnej szerokości obiektu, tak i tu błąd nierównoległości wiązki można wyeliminować przez zastosowanie odpowiedniej poprawki uzyskanych wyników pomiarów.
3.3.3 Źródła promieniowania Kolejnym podziałem czujników optycznych jest podział ze względu na pracę w różnych zakresach widmowych. Długość fali świetlnej emitowanej przez nadajnik odgrywa jedną z najważniejszych ról w skuteczności działania czujników optycznych przy wykrywaniu obiektów. Źródłami promieniowania stosowanymi w czujnikach optycznych są zarówno żarówki emitujące światło widzialne, jak i diody pracujące w podczerwieni oraz diody

30
laserowe. Okazuje się, że czujniki oparte na promieniowaniu widzialnym są bardzo wrażliwe na światło tła. Aby minimalizować ten niepożądany efekt stosuje się źródła światła o dużych mocach (nawet do 20W) [4]. Jako wadę czujników, w których stosuje się żarówki należy też zaliczyć dużą nierównoległość wiązki, spowodowaną tym, że żarnik żarówki nie jest punktowym źródłem światła. Efekt ten minimalizuje się przez stosowanie odpowiednich układów optycznych (najprostsze składają się z pojedynczej soczewki). Lepsze własności pod względem nieczułości na światło tła posiadają czujniki emitujące promieniowanie podczerwone. Skutkiem tego jest możliwość stosowania źródeł o znacznie mniejszych mocach. W czujnikach tego typu również stosuje się układy optyczne do eliminacji nierównoległości wiązki światła. Najlepsze własności pod względem źródła promieniowania posiadają czujniki laserowe, w których uzyskuje się silne źródło światła przy niewielkiej dostarczonej mocy. Czujniki tego typu są mniej wrażliwe na światło otoczenia oraz charakteryzują się największymi zakresami działania. Ponadto charakteryzują się bardzo małą szerokością emitowane wiązki (do 0,5mm), co niesie za sobą szersze możliwości ich stosowania, np. do wykrywania obiektów o małych gabarytach.
3.3.4 Kąt detekcji W odróżnieniu od systemu wizyjnego, w przypadku zastosowania pojedynczych czujników optycznych do wykrywania obiektów w polu ich działania nie jesteśmy w stanie wykryć orientacji obiektu. Różne kąty detekcji niosą za sobą różne czasy trwania impulsów wyjściowych [4], w zależności od tego pod jakim kątem obiekt porusza się względem wysyłanej wiązki światła. Efekt ten pokazuje rysunek 24.
Rysunek 24 Wpływ kąta detekcji na czas pomiaru.
Czas impulsu wyjściowego czujnika, gdy obiekt porusza się pod kątem prostym do kąta detekcji (rysunek 24a) będzie opisany wzorem:
vL
t 00 = (3)
gdzie: 0L – odległość, gdy obiekt jest wykrywany przy pomiarze prostopadłym;
v – prędkość obiektu wykrywanego. Jeśli obiekt nie porusza się pod kątem prostym do kąta detekcji (rysunek 24b) to czas impulsu wyjściowego czujnika opisuje zależność (4).

31
αα sinsin
00 tv
LvLt =
⋅== (4)
gdzie:
0L – droga, na której obiekt jest wykrywany przy pomiarze prostopadłym; L – wypadkowa droga pomiaru; t – wypadkowy czas pomiaru;
0t – czas pomiaru przy pomiarze prostopadłym; α – kąt detekcji obiektu. Występujący tu błąd jest multiplikatywnym błędem systematycznym pomiaru, który można wyeliminować znając kąt detekcji α . W przypadku śledzenia obiektu zmieniającego orientację w czasie, błąd ten jest bardzo trudny do wyeliminowania, wręcz niemożliwy, gdy nie mamy informacji a priori o ruchu obiektu.
3.3.5 Modulacja wiązki Bardzo często w systemach automatyki stosuje się zespół czujników, który dostarcza znacznie więcej informacji o ruchu obiektu. Wówczas pojawia się problem wzajemnego zakłócania działania czujników poprzez odbieranie obcego promieniowania. Efekt ten eliminowany jest przez modulację wiązki światła falą prostokątną. Częstotliwość modulacji na ogół mieści się w zakresie od setek do 20kHz [4]. Ponadto modulacja zmniejszenia wrażliwości czujników na zakłócenia wynikające z oświetlenia tła. Zabieg ten znacznie poprawia detekcję wiązki, nawet na tle silnego oświetlenia.
3.4 Czujniki do badań
Jednym z głównych celów budowy systemu namierzania było przedstawienie różnic w działaniach czujników optycznych w wykrywaniu i śledzeniu obiektów różnych pod względem faktury, koloru itp. Stąd w pracy wykorzystano dwa typy czujników optycznych firmy SICK2 skrajnych klas. Zastosowane czujniki są urządzeniami stosowanymi dość powszechnie w systemach automatyki przemysłowej, w fabrykach do wykrywania obecności przedmiotów (kartony, butelki itd.), jak również do wykrywania położeń przedmiotów w danym obszarze (sprawdzanie czy element jest zamknięty/otwarty, pozycjonowanie elementu w skrajnych pozycjach itd.). Czujniki te mimo prostoty wyglądu i niewielkich gabarytów są złożonym systemem. W systemach automatyki niezbędna jest pewność działania oraz dostarczanie gotowej informacji o przedmiocie bez konieczności dalszej jej obróbki. Stąd na budowę czujnika nie składa się tylko element wykrywający zmianę otoczenia (detektor), ale także wbudowany system mikroprocesorowy przetwarzający dostarczoną informację i odpowiedni filtr przepuszczający jedynie wiązkę światła wysłaną przez nadajnik czujnika oraz tłumiący inne niepożądane efekty (np. oświetlenie). W rozdziałach 3.4.1 oraz 3.4.2 przedstawiono parametry wykorzystanych czujników. Parametry te są katalogowe podane przez firmę SICK. Na początku pisania pracy rozważano testowanie wybranych parametrów samemu, jednak z czasem uznano, że byłoby to tylko powielenie wyników zamieszczonych przez producenta. Stąd przy wyborze odpowiednich czujników kierowano się danymi katalogowymi oraz konsultacjami z ekspertem do spraw
2 Serdeczne podziękowania firmie SICK za udostępnienie czujników do badań.

32
czujników z firmy SICK. Efektem tego był wybór dwóch modeli fotoprzekaźników o oznaczeniach VTE18-4P8740 i WT18-3N110.
3.4.1 Fotoprzekaźnik VTE18-4P8740 Jest to jeden z prostszych czujników do wykrywania obecności przedmiotów na niewielkie odległości. Zastosowany czujnik działa w maksymalnym zakresie 3-800mm (dotyczy to wykrywania białych, dobrze odbijających światło przedmiotów). Na rysunku 25a przedstawiono widok czujnika VTE18-4P8740. Jego niewielkie wymiary (rysunek 25b) oraz cylindryczna budowa sprawia, że czujnik można stosować w trudno dostępnych miejscach, gdzie liczy się zwartość i łatwość w zamocowaniu. Dodatkową zaletą jest mała masa wynosząca dla czujnika wykonanego z tworzywa sztucznego (100g) [3]. Urządzenie przystosowane jest do pracy w zakresie temperatur -25˚C-+70˚C.
Rysunek 25 a) Widok, b) c) Wymiar, d) funkcje pinów czujnika VTE18-4P8740 [3]. 1 – gniazdo do przyłączenia kabla; 2 – nakrętki mocujące, średnica czujnika 22mm
(standardowa w automatyce przemysłowej); 3 – regulacja czułości; 4 – wskaźnik siły sygnału (żółta dioda LED).
Fotoprzekaźnik wysyła i wykrywa wiązkę światła podczerwonego. Kąt rozproszenia wysyłanej wiązki światła przez nadajnik wynosi 2.8˚. Szerokość wiązki światła dla odległości 800mm wynosi około 40mm. Dużą zaletą jest krótki czas reakcji w wykrywaniu zmian otoczenia (pojawianie, znikanie przedmiotów w polu działania czujnika) wynoszący do 2ms. Czas ten jest znikomo mały w porównaniu z prędkościami poruszania się obiektów na stanowisku badawczym. Maksymalna częstotliwość przełączeń przy wykrywaniu/usuwaniu przedmiotu z pola działania czujnika wynosi 250 ma sekundę. Zaletą urządzenia jest dość szeroki zakres napięcia zasilania, który wynosi 10V-30V DC, a także niewielki pobór prądy (do 130mA). Na stanowisku laboratoryjnym czujniki te zasilane są napięciem 12V. Rozmieszczenie pinów VTE18 przedstawia rysunek 25d, gdzie L+ (pin 1, przewód brązowy na kablu) to plus zasilania, M (pin 3, przewód niebieski) – masa, Q (pin 4, przewód czarny) – informacja o wykryciu (bądź braku) obiektu w strefie działania czujnika. Dodatkowym pinem jest L/D (przewód biały), dzięki któremu możemy ustalić czy wyjście Q ma stan wysoki, gdy przedmiot został wykryty, bądź gdy nic nie wykryto. Zwierając L/D do L+ (+ zasilania), uzyskujemy tryb pracy, w którym wyjście Q ma stan wysoki (równy napięciu zasilania), gdy wysłana wiązka powróci do czujnika (wykryto przedmiot). Przy

33
zwarciu L/D do M (masa), wyjście Q ustala się na poziomie stanu niskiego (0V) w przypadku wykrycia przedmiotu oraz na poziomie stanu wysokiego w przypadku przeciwnym.
3.4.2 Fotoprzekaźnik WT18-3N110 Czujniki serii WT18 są jednymi z najlepszych wśród fotoprzekaźników pod względem wykrywania obiektów o zróżnicowanej fakturze. Maksymalny zakres pracy jest regulowany od 50 do 700mm. Na rysunku 26 przedstawiono widok oraz wymiary czujnika. Widać, że większa niezawodność wykrywania pociąga za sobą nieco zwiększone gabaryty w porównaniu z VTE18 (rozdział 3.4.2). Mimo to urządzenie jest lekkie (około 120g), umieszczone w zwartej wykonanej z wytrzymałego tworzywa sztucznego obudowie znajduje zastosowanie w wielu aplikacjach, w szczególności w utrudnionych warunkach pracy – nieprzyjazne oświetlenie, materiały trudno wykrywalne dla zwykłych fotoprzekaźników (chropowate, o bardzo ciemnych kolorach).
Rysunek 26 a) Widok, b) c) wymiary czujnika WT18-3N110 [3].
1 – położenie nadajnika; 2 – położenie odbiornika; 3 – otwory mocujące, średnica 4.1mm; 4 – zielona dioda LED – wskaźnik zasilania;
5 – żółta dioda LED – status odebranej (wcześniej wysłanej) wiązki światła; 6 – pokrętło ustawienia zakresu pomiarowego.
Podobnie jak VTE18, fotoprzekaźnik WT18 wyposażony jest w nadajnik LED i odbiornik reagujący na światło podczerwone. Szerokość wiązki dla odległości 400mm wynosi 20mm [3]. WT18 cechuje bardzo mały czas reakcji w wykrywaniu zmian w otoczeniu, który wynosi do 0.7ms. Stąd częstotliwość przełączania może osiągać wartości do 700Hz. Zatem widzimy, że czujnik jest prawie trzykrotnie szybszy w porównaniu z VTE18. Na rysunku 27 przedstawiono dostępne wyprowadzenia fotoprzekaźnika WT18. Pomiędzy piny L+ (plus zasilania) a M (masa) doprowadza się napięcie zasilania, które może mieścić się w zakresie 10V-30V DC. Maksymalny pobierany prąd to 155mA. Wyjście Q (przewód czarny) ustawiane jest w stan wysoki (poziom napięcia plus zasilania), gdy odbiornik wykryje wysłaną wcześniej przez nadajnik wiązkę światła. Dodatkowo mamy dostęp do zanegowanej wartości wyjścia Q (przewód biały).

34
Rysunek 27 Piny WT18-3N110.
Czujnik może pracować w szerokim zakresie temperatur od -40˚C do 75˚C. Intuicyjne jest, że wysyłana wiązka światła może ulegać rozproszeniu, pochłanianiu w zależności od warunków, w których pracuje czujnik. Jednym z głównych powodów zmiany zakresu detekcji obiektów jest ich powierzchnia i kolor. Rysunek 28 przedstawia zmiany zakresu skanowanej odległości w zależności od koloru wykrywanego obiektu [3].
Rysunek 28 Wpływ koloru na zakres skanowanej odległości.
Oznaczenia do rysunku 28: 1 – odległość przy skanowaniu obiektu koloru czarnego; 2 – odległość przy skanowaniu obiektu koloru szarego; 3 – odległość przy skanowaniu obiektu koloru białego.

35
4 Sonar System śledzenia, do pomiaru odległości znalezionego obiektu wykorzystuje moduł sonaru SFR08 (rysunek 29) [11]. Wybór był podyktowany wcześniejszym doświadczeniem z tego typu urządzeniem. Dużą zaletą modułu jest komunikowanie się w sposób cyfrowy, poprzez magistralę I2C. Moduł oparty jest na mikrokontrolerze PIC16F872. Rozwiązanie tego typu sprawia, że wszelkie pomiary odległości sonaru realizowane są na poziomie modułu nie obciążając w obliczeniach głównego mikrokontrolera. Dzięki temu, nadzorujący procesor może zadać modułowi pomiar odległości i odczytać ją w przeliczonych jednostkach (centymetry, cale) we właściwej chwili. SFR08 przyłączony do magistrali I2C pracuje zawsze jako podporządkowany (slave). Domyślny adres modułu to 0xE0 (zapis heksadecymalny). Istnieje możliwość zmiany adresu na jedną z 16 wartości (więcej informacji w karcie katalogowej producenta), w przypadku stosowania więcej niż jednego modułu typu SFR08 lub innego urządzenia, które miałoby taki sam adres.
Rysunek 29: Widok modułu sonaru SRF08.
Urządzenie zasilane jest napięciem stałym 5V. Do zapewnienia poprawnej komunikacji głównego mikrokontrolera z SFR08 należy dodać rezystory podciągające do +5V (Pull up resistrors) o wartości około 3.3KΩ do linii zegara SCL i danych SDA. Dostęp do pomiarów wykonanych przez moduł sonaru możliwy jest poprzez 36 rejestrów SFR08 (tabela 2).
Tabela 2: Funkcje rejestrów SFR08.
Adres rejestru Opcja odczytu Opcja zapisu 0 Software revision Rejestr rozkazów 1 Czujnik światła Rejestr max wzmocnienia 2 Starszy bajt pierwszego wyniku Zakres pomiarowy
(domyślnie 255) 3 Młodszy bajt pierwszego wyniku Niedostępna ~ ~ ~ 34 Starszy bajt 17-stego wyniku Niedostępna 35 Młodszy bajt 17-stego wyniku Niedostępna
Tylko pierwsze trzy rejestry mają opcje do zapisu i odczytu. Zapisanie odpowiedniej wartości do rejestru rozkazów (adres 0) powoduje rozpoczęcie pomiaru. Odczyt tego rejestru zwraca numer wersji oprogramowania (software revision). Pomiar odległości trwa domyślnie około 65ms. Może być zmieniony poprzez zmianę zakresu pomiarowego sonaru (rejestr zakresu pomiarowego – adres 2). Pod adresem 1 znajduje się wynik pomiaru z wbudowanego czujnika światła. Czujnik nie jest wykorzystywany w systemie śledzenia, dlatego więcej informacji na jego temat podaje karta katalogowa [11]. Kolejne pary rejestrów, poczynając od

36
2 i 3, reprezentują 16-bitowe liczby bez znaku, będące wynikiem ostatniego pomiaru sonaru (młodszy adres – starszy bajt). Znaczenie wartości wyniku zależy od wartości inicjującej pomiar w rejestrze rozkazów – odległość w calach, centymetrach, albo czas przelotu w mikrosekundach (tabela 3). Odczyt wartości 0, jako wyniku pomiaru świadczy o nie znalezieniu żadnego obiektu w strefie działania sonaru. Następne 16 wyników w rejestrach pomiarowych zawierają wartości różne od zera w przypadku znalezienia w dalszym polu działania sonaru kolejnych obiektów.
Tabela 3: Wartości inicjujące pomiar. Rozkaz (hex) Rodzaj wyniku
0x50 Cale 0x51 Centymetry 0x52 Mikrosekundy
Po wpisaniu jednej z wartości z tabeli 3 do rejestru rozkazów, należy odczekać odpowiedni czas (domyślnie 65ms), po którym można odczytać aktualny wynik pomiaru. W programie obsługi sonaru zamiast czekać ustalony czas, wykorzystuje się fakt, iż moduł podczas trwania pomiaru nie odpowiada – czytając wartość spod adresu 0 (rejestr rozkazów) odczytujemy wartość 0xFF. Jest to duża zaleta, gdyż w tym czasie główny procesor może wykonywać inne zadania. Oczytanie spod adresu 0 wartości 0, świadczy o zakończeniu pomiaru i możliwości odczytu wyników spod adresów od 2 do 35. Ważnym parametrem każdego urządzenia pomiarowego jest szybkość otrzymywania wyniku od chwili startu. W przypadku sonaru, czas trwania pomiaru zależy od czasu od chwili wysłania do chwili otrzymania sygnału ultradźwiękowego. Moduł SFR08 umożliwia programową zmianę zakresu pomiarowego. Pozwala to na skrócenie czasu oczekiwania na wynik pomiaru, a w konsekwencji umożliwia większą częstość wykonywania pomiarów. Maksymalny zakres pomiarowy SFR08 jest ustawiany przez wewnętrzny timer modułu. Domyślnie czas oczekiwania na zakończenie pomiaru wynosi 65ms co odpowiada maksymalnej odległości pomiarowej ponad 11 metrów. Zakres sonaru jest wielokrotnością odległości 43mm (1.68cala). Zakres wyliczany jest według zależności (5).
_ ( _ 43 ) 43New range Range register mm mm= ⋅ + (5) gdzie: New_range – nowy zakres pomiarowy; Range_register – wartość wpisana w rejestrze zakresu (adres 2). Zmianę zakresu należy wykonywać po każdym załączeniu zasilania. Moduł SFR08 wyposażony jest w diodę LED, która pełni dwie funkcję:
– Wyświetla (przez odpowiednią liczbę błyśnięć) bieżący adres I2C modułu, przy załączeniu go do zasilania;
– Krótkie błyśnięcie w czasie pracy modułu świadczy o rozpoczęciu pomiaru przez sonar.
Zaletą SFR08 jest także mały pobór prądu, który wynosi średni około 12mA podczas trwania pomiaru oraz 3mA w trybie czuwania. Największy pobór prądu pojawia się w momencie załączenia zasilania – około 300mA. Tabela 4 przedstawia średnie pobory prądu oraz czasy ich trwania.

37
Tabela 4: Pobór prądu SFR08. Operacja Wartość prądu [mA] Czas trwania [ms]
Załączenie zasilania 275 0.003 pomiar 12 65
Oczekiwanie na start pomiaru
3 ∞
Wysłanie wiązki ultradźwiękowej
40 0.2
Podane powyżej wartości są wartościami katalogowymi – nie są wynikiem eksperymentów wykonanych w ramach projektu. Rysunek 30 przedstawia zależność szerokości wiązki ultradźwiękowej w funkcji powierzchni skanowanego obszaru [11]. Sonar charakteryzuje się wiązką o standardowej częstotliwości 40kHz.
Rysunek 30: Szerokość wiązki nadajnika sonaru SFR08 [11].

38
5 Urządzenie testujące
Ważną rzeczą przy przeprowadzaniu wszelakich eksperymentów jest to, by zapewnić ich wykonywanie w sposób powtarzalny. Ponadto aby były precyzyjne i dokładne, występowały w takich samych warunkach. W ten sposób jesteśmy w stanie jednoznacznie określić charakter badanej cechy, jej zależność na zmiany określonych parametrów, a więc w ogólności wyciągnąć właściwe wnioski. Początkowo rozważano przeprowadzenie eksperymentów ręcznie. Jednak powtarzalności przy jednoczesnej dużej dokładności nie dają nam ruchy ludzkich rąk. Stąd pojawiła się w projekcie potrzeba zbudowania właściwego urządzenia, które pozwoliło na przeprowadzenie badań i ich rzetelną ocenę. Ze względu na testowanie systemu w przestrzeni 2D, urządzenie powinno charakteryzować się możliwością zadawania ruchu w dwóch kierunkach. Po analizie i rozważaniach, które wymiary przestrzeni będą najbardziej pomocne podczas testowania systemu namierzania, wybrano dwa ruchy poziome w osiach X (wzdłuż) i Y (wszerz). Rysunek 31 przedstawia widok testera.

39
Rysunek 31 Tester – rzuty. 1-listwa zębata, 2-prowadnice, 3-mocowanie dla obiektów, 4-silnik osi X,
5-prowadnik przewodów, 6-przewody, 7-złącze DB37 (męskie), 8-zderzaki, 9-wycięcie dla prowadnika przewodów

40
5.1 Konstrukcja mechaniczna
Rysunek 32 przedstawia pierwszą (prototypową) konstrukcję generatora ruchu, który umożliwił dalszą pracę badawczą.
Rysunek 32 Konstrukcja testera w fazie budowy.
Rama konstrukcji zbudowana jest z profili aluminiowych (kątowników) o szerokości 50mm i grubości 2mm (rysunek 33).
Rysunek 33 Kątownik aluminiowy a) Wymiary, b) Widok.
Wybór materiału był podyktowany dwoma aspektami. Po pierwsze łatwa obróbka mechaniczna, po drugie zastosowanie jak najlżejszego materiału przy zapewnieniu odpowiedniej wytrzymałości. Dokładne prowadzenie w osiach XY zapewniają dwie profesjonalne, wykonane z dużą precyzją prowadnice z łożyskowanymi wózkami. Prowadnice tego typu są często stosowane w przemyśle, np. w różnorakich obrabiarkach, gdzie wymagana jest bardzo duża dokładność prowadzenia. Zmniejszenie tarcia pomiędzy prowadnicą a wózkiem zapewnia odpowiednie

41
łożysko kulkowe (rysunek 35) oraz możliwość wprowadzenia dodatkowego smarowania. Rysunek 34 przedstawia wymiary wózka oraz szyny prowadnicy. W celu zapewnienia ochrony przed efektami starzenia konstrukcji mechanicznej oraz uzyskania dodatkowego efektu wizualnego, podobnie jak w systemie śledzenia, główne elementy aluminiowe stanowiska zostały poddane galwanizacji w firmie Galchem w Ostrowie Wielkopolskim.
Rysunek 34 Wózek z kołnierzem a) widok z przodu, b) widok z boku.
Rysunek 35 Widok przekroju wózka z łożyskiem [13].
5.1.1 Układ napędowy Drugą bardzo ważną cechą urządzenia do zadawania ruchu, obok prowadzenia, jest przekazanie napędu na element wykonawczy. W pracy dążono do zastosowania napędu, który pozwoli na niezawodny płynny ruch przy jednoczesnej nieskomplikowanej budowie. Tu, po rozważaniach oraz przeglądzie dostępnych metod przenoszenia napędu zdecydowano się na

42
zastosowanie listew i kół zębatych (rysunki 36, 37). Wprawianiem w ruch napędu zajmują się dwa silniki prądu stałego (po jednym na każdy stopień swobody). Ze względu na niewielkie wymiary testera (600x800mm) śledzony obiekt nie może rozwijać bardzo dużych prędkości. Stąd dodatkowo należało spowolnić ruch silników. W tym celu zastosowana została odpowiednia przekładnia planarna nabudowana na silniki. Więcej informacji na temat silników znajduje się w rozdziale 5.2.1.
Rysunek 36 Zębatka a) wymiary, b) widok [13].
Rysunek 37 a) wymiary, b) widok listwy zębatej [13].
5.1.2 Prowadzenie przewodów Jednym z problemów jaki się napotyka w przypadku urządzeń, gdzie występują ruchome części jest prowadzenie przewodów w sposób uporządkowany oraz gwarantujący nieinwazyjną pracę. Najlepszym rozwiązaniem tego typu problemu jest zastosowanie prowadników przewodów, jakie często stosuje się w profesjonalnych urządzeniach typu frezarki, tokarki itp. W projekcie zastosowano dwa prowadniki o sumarycznej długości 1.5m przedstawione na rysunkach 38 i 39.
Rysunek 38 Widok prowadnika przewodów SR200.

43
Rysunek 39 Prowadnik przewodów SR200 a) widok, b) wymiary [13].
W urządzeniu zastosowano dwa oddzielne prowadniki – dla każdej osi ruchu.
5.1.3 Mocowanie obiektów do badań W projekcie założono, że obiekty do testów systemu śledzenia będą cylindrami o ustalonych długościach i średnic. Na podstawie tego zaprojektowano mocowania, które umożliwią szybką i łatwą wymianę obiektów (rysunek 40).
Rysunek 40 Widok mocowania obiektów na ruchomym wózku.
Zastosowane rozwiązanie pozwala na testowanie do trzech różnych obiektów.
5.1.4 Zderzak Ograniczony obszar poruszania się ruchomego wózka niesie za sobą potrzebę dostarczenia informacji na temat dojazdu do krawędzi. Potrzeba taka związana jest również z uniknięciem niekontrolowanego uderzenia w krawędź i uszkodzeniem mechanicznym lub elektrycznym (uszkodzenie silników) testera. Informację do osiągnięciu jednej z czterech pozycji skrajnych dostarczają zderzaki oparte na mikroprzełącznikach (rysunek 41). Aby zwiększyć pewność działania, każdy zderzak wyposażony został w podwójne krańcówki.

44
Rysunek 41 Zderzak a) widok, b) budowa. 1-profil aluminiowy, 2-mikroprzełączniki.
5.2 Część elektroniczna
5.2.1 Silniki Główne cechy jakimi kierowano się przy wyborze silników to łatwość zapewnienia zasilania, proste sterowanie oraz uzyskanie odpowiedniego momentu obrotowego przy niewielkich prędkościach obrotowych. Ograniczeniem był również koszt. Po przeglądnięciu i przeanalizowaniu dostępnych na rynku silników zdecydowano się na wybranie silników prądu stałego o oznaczeniu EMG30, dedykowane i wykorzystywane często w prostych aplikacjach robotycznych. Silniki przedstawiono na rysunkach 42 i 43. Silniki te wyposażone są w przekładnie o redukcji prędkości obrotowej 30:1. Dodatkowo posiadają sygnały sprzężenia zwrotnego w postaci wbudowanych enkoderów. Kolejną zaletą są wlutowane kondensatory tłumiące ewentualne zakłócenia elektryczne powstałe podczas pracy silników.
Rysunek 42 Widok silnika EMG30.

45
Rysunek 43 Wymiary silnika EMG30 [13].
Silnik zasilany jest napięciem stałym o wartości 12V. Opis przewodów wyprowadzonych od strony silnika przedstawiono w tabeli 5. Z kolei tabela 6 prezentuje najważniejsze parametry silnika [1].
Tabela 5: Znaczenie przewodów silnika EMG30. Kolor przewodu Znaczenie
Purpurowy Wyjście kwadraturowe, kanał A Niebieski Wyjście kwadraturowe, kanał B Zielony Masa enkoderów, 0V Brązowy Zasilanie enkoderów, +5V Czerwony Sygnał sterujący silnikiem +
Czarny Sygnał sterujący silnikiem -
Tabela 6: Specyfikacja silnika. Wielkość Wartość
Napięcie nominalne 12V Nominalny moment obrotowy 14.7N·cm Minimalna prędkość obrotowa 1.5obr/min
Maksymalna prędkość obrotowa 200obr/min Nominalny prąd 530mA
Prąd przy zatrzymaniu silnika 2.5A Moc wyjściowa 4.22W
Liczba zliczeń enkodera na jeden obrót wału 360 Mimo wbudowanych kondensatorów, przy pracy silników powstawały znaczne zakłócenia uniemożliwiające odczyt wartości enkoderów. Dodatkowo na zakłócenia wpływała znaczna długość kabli (ponad 2m do jednego silnika). W celu eliminacji zakłóceń należało wykonać modyfikacje polegającą na dodaniu odpowiednich gasików, co prezentuje rysunek 44.

46
Rysunek 44 a) Układ przeciwzakłóceniowy, b) widok wyprowadzeń silnika.
5.2.2 Sterownik silników Zapewnienie odpowiedniego sterowania jest jednym z najważniejszych oraz trudniejszych problemów w projektach wymagających zastosowania silników prądu stałego. Na wybór silników EMG30 wpłynęły nie tylko warunki opisane w rozdziale 5.2.1, ale również dostępność właściwego dla nich sterownika. Zastosowany sterownik o oznaczeniu MD23 (rysunek 45) [2] pozwala na jednoczesne sterowanie dwoma dowolnymi silnikami prądu stałego zasilanymi napięciem 12V. W szczególności dedykowany jest do sterowania silnikami EMG30, o czym świadczą wbudowane właściwe złącza umożliwiające bezpośrednie podłączenie tych silników. Olbrzymią zaletą jest tu cyfrowa komunikacja z mostkiem3 zrealizowana w oparciu o magistralę I2C. Przy zastosowaniu silników EMG30 możliwy jest również odczyt stanu wyjść enkoderów oraz zliczanie impulsów w odpowiednich rejestrach sterownika, a co za tym idzie odciążenie głównego mikrokontrolera sterującego całym systemem.
Rysunek 45 Widok sterownika MD23 [2].
Moduł zasilany jest napięciem stałym 12V. Na płytce sterownika umieszczone są wyprowadzenia: zasilanie +5V, linia danych (SDA), linia zegara (SCL) oraz masa (0V), które
3 Mostek – inne określenie sterownika silników

47
umożliwiają bezpośrednie podłączenie innych urządzeń I2C. Warunkiem poprawnej pracy tak podłączonych urządzeń jest ograniczenie poboru prądu: ciągłe 300mA; chwilowe do 1A. Sterownik umożliwia nie tylko sterowanie prędkością obrotową silników, ale również ich przyspieszeniem oraz mocą, dzięki możliwości odczytu chwilowej wartości pobieranego przez silniki prądu z odpowiednich rejestrów. Nominalna wartość napięcia zasilającego powinna wynosić 12V, jednak dopuszcza się wahania z przedziału 9V-14V. Napięcie powyżej 14V może spowodować uszkodzenie modułu MD23 (producent dopuszcza max chwilowe napięcie do 18V). Zasilanie modułu jest sygnalizowane przez ciągłe świecenie czerwonej diody LED przy złączu zasilającym 12V. Zielona dioda LED sygnalizuje poprawne nawiązanie komunikacji z modułem MD23. W chwili załączenia zasilania zaświecenie tej diody reprezentuje adres I2C sterownika. Kolejne zaświecenia na czas 500ms oznaczają poprawne nawiązanie komunikacji z modułem. W chwili ciągłej wymiany danych zielona dioda LED świeci ciągłym światłem. Jedną z właściwości modułu jest automatyczna regulacja prędkości obrotowej silników bez ingerencji z zewnątrz. Możliwe jest to dzięki sprzężeniu zwrotnemu w postaci enkoderów, które jak wspomniano, są podłączone do układu MD23. W ten sposób zewnętrzny sterownik zadaje jedynie prędkość, a sterowaniem silników, aby tę prędkość uzyskać zajmuje się moduł MD23. Automatyczna regulacja możliwa jest dzięki ustawieniu wcześniej odpowiedniego trybu pracy. Sterownik umożliwia wyłączenie automatyczne silników, w przypadku gdy zaniknie transmisja I2C na czas dłuższy niż 2 sekundy. Jest to duża zaleta w tego typu aplikacji, ze względu na fakt, iż w przypadku błędnej pracy („zawieszenie się”) mikrokontrolera uniemożliwia przypadkowy ruch silników, który z kolei mógłby spowodować uszkodzenie mechaniczne i/lub elektryczne.
– Rejestry MD23 Jak już wspomniano sterowanie modułem MD23 możliwe jest przez magistralę I2C spod adresów 0xB0-0xBE. Domyślny adres 0xB0. Zmiana adresu na adres z zadanego zakresu możliwy jest poprzez usunięcie odpowiedniej zworki na płytce sterownika lub softwarowo. MD23 posiada 17 rejestrów numerowanych od 0 do 16 przedstawionych w tabeli 7.
Tabela 7: Rejestry MD23. Adres Nazwa Tryb Skrótowy opis
0 Speed1 Odczyt/Zapis Prędkość silnika 1 1 Speed2/Turn Odczyt/Zapis Prędkość silnika 2 2 Enc1a Odczyt Enkoder 1 pozycja, 1. bajt (najstarszy) 3 Enc1b Odczyt Enkoder 1 pozycja, 2. bajt 4 Enc1c Odczyt Enkoder 1 pozycja, 3. bajt 5 Enc1d Odczyt Enkoder 1 pozycja, 4. bajt (najmłodszy) 6 Enc2a Odczyt Enkoder 2 pozycja, 1. bajt (najstarszy) 7 Enc2b Odczyt Enkoder 2 pozycja, 2. bajt 8 Enc2c Odczyt Enkoder 2 pozycja, 3. bajt 9 Enc2d Odczyt Enkoder 2 pozycja, 4. bajt (najmłodszy) 10 Bartery volts Odczyt Napięcie zasilania 11 Motor1 current Odczyt Prąd pobierany przez silnik 1 12 Motor2 current Odczyt Prąd pobierany przez silnik 2 13 Software Revision Odczyt Wersja software’u 14 Acceleration Rate Odczyt/Zapis Przyspieszenie silników 15 Mode Odczyt/Zapis Tryb pracy modułu 16 Command Odczyt/Zapis Zerowanie enkoderów, zmiana adresu I2C

48
Rejestr trybu pracy modułu może przyjmować następujące wartości: 0 – (tryb domyślny) prędkość silników określają wartości: 0-max prędkość w prawo, 128-stop silnika, 255-max prędkość w lewo; 1 – tryb różni się od trybu zerowego jedynie wartościami określającymi prędkości silnika: -128-max prędkość w prawo, 0-stop silnika, 127-max prędkość w lewo; 2 – tryb ten umożliwia sterowanie dwoma silnikami w ten sposób, że rejestr speed1 jest prędkością zadawaną dla obu silników a poprzez rejestr speed2/Turn Value zadaje się obrót jaki mają wykonać silniki; prędkości silników zadaje się jak dla trybu 0; 3 – tryb jest połączeniem trybu 2 i 1 (sterowanie dwoma silnikami z prędkościami z zakresu -128 do 127).
W pracy do sterowania silnikami wykorzystano tryb 1 z automatyczną regulacją prędkości silników. Dane o przejechanym dystansie przeliczane są na podstawie wartości z rejestrów enkoderów (360 zliczeń/obrót).
– Rejestr komend MD23 Rejestr komend sterownika jest kluczowym rejestrem, stąd poświęcono mu oddzielny rozdział. Tabela 8 przedstawia dostępne komendy (tryby) sterownika MD23.
Tabela 8: Rejestr komend MD23 Komenda (hex) Akcja
0x20 Zeruj rejestry enkodera 0x30 Wyłącz automatyczną regulację prędkości silników 0x31 Włącz automatyczną regulację prędkości silników (domyślne) 0x32 Wyłącz 2-sekundowy timeout silników, gdy brak komunikacji I2C 0x33 Włącz 2-sekundowy timeout silników, gdy brak komunikacji I2C 0xA0 Pierwszy bajt w kolejności do zmiany adresu I2C 0xAA Drugi bajt w kolejności do zmiany adresu I2C 0xA5 Trzeci bajt w kolejności do zmiany adresu I2C
– Zmiana adresu MD23 Zmiana adresu I2C modułu możliwa jest przez wpisanie adresu do MD23 (softwarowo) lub przez usunięcie/założenie odpowiedniej zworki na płytce sterownika (harwarowo). Aby możliwa była softwarowa zmiana adresu I2C do magistrali może być podłączony tylko jedno urządzenie I2C.
Tabela 9: Sygnalizacja ustawienia adresu I2C. Adres (hex) Liczba długich
mrugnięć Liczba krótkich
mrugnięć 0xB0 1 0 0xB2 1 1 0xB4 1 2 0xB6 1 3 0xB8 1 4 0xBA 1 5 0xBC 1 6 0xBE 1 7
Więcej szczegółów podanych jest w dokumentacji podanej przez producenta [2].

49
5.2.3 Złącze testera Na przedniej części konstrukcji aluminiowej testera zamontowane jest złącze szufladowe 37-pstykowe (rysunek 46), do którego doprowadzone są zasilania silników, sygnały dla enkoderów (zasilania, wyjścia kwadraturowe) oraz zderzaków. Poszczególne piny rozdzielone są tak, by zasilania silników były oddalone od sygnałów z enkoderów. Związane jest to z występowaniem zakłóceń generowania sygnałów z enkoderów przez działające silniki. Każda strona ruchomego wózka (obiektu) posiada własną parę sygnałów z krańcówek (przewód sygnałowy i GND). Rozwiązanie to gwarantuje większą niezawodność zderzaków – uszkodzenia jednej z krańcówek, nie zakłóca poprawnej pracy pozostałych.
Rysunek 46 Rozplanowanie pinów złącza DB37 testera.
Dodatkowo, w celu eliminacji zakłóceń elektromagnetycznych powstałych w przewodach podczas pracy enkoderów, każda żyła sygnałów enkoderowych rozdzielona jest dodatkową masą (GND). W panelu sterowania, wszystkie dodatkowe masy są zebrane w jeden przewód i przyłączone do głównej masy układu elektronicznego.
5.3 Zadawanie ruchu
Sterowanie testera możliwe jest na dwa sposoby: sterowanie ręczne z joysticka panelu operatorskiego, zadanie określonej trajektorii ruchu z panelu operatorskiego.
5.3.1 Sterowanie ręczne
Prędkości oraz kierunki przesuwu w osiach XY zależne od kąta wychylenia dźwigni joysticka od pozycji neutralnej. Im większe wychylenie, tym większa prędkość (pozycja neutralna – prędkość zerowa, pozycja maksymalnego wychylenia – maksymalna prędkość na silnik). Kierunek przesuwu zgodny z kierunkiem wychylenia dźwigni joysticka, gdy orientacja panelu operatorskiego ustawiona jest zgodnie orientacją układu współrzędnych testera.

50
5.3.2 Zadana ścieżka
Tester umożliwia wykonanie kilku określonych trajektorii ruchu obiektu. Rozważając możliwe krzywe, po których mógłby się poruszać obiekt, zdecydowano się na zaimplementowanie ruchu po odpowiednio sparametryzowanych krzywych Lissajous (6). Położenie punktu na płaszczyźnie XY w chwili t określa zależność poniżej [9]:
0 0
0
2( ) cos
2( ) sin
xx
yy
Nx t A tT
Ny t A t
T
π ψ ξ
πη
⋅⎛ ⎞= ⋅ ⋅ + +⎜ ⎟⎝ ⎠
⋅⎛ ⎞= ⋅ ⋅ +⎜ ⎟
⎝ ⎠
(6)
gdzie: T – czas trwania obiegu krzywej (okres);
xA , yA – amplitudy krzywej odpowiednio wzdłuż osi X i Y;
xN , yN – liczba powtórzeń ruchu na danej osi w okresie T;
0ψ – orientacja krzywej na płaszczyźnie;
0ξ , 0η – położenie początkowe na płaszczyźnie. Ponieważ sterowanie silnikami osi XY opiera się na sterowaniu prędkościami, dlatego należy wyprowadzić zależność na ( )x t i . Na podstawie (( )y t 6) po zróżniczkowaniu otrzymujemy:
02 2( ) sin
2 2( ) cos
x x x
y y y
N A Nx t tT T
N A Ny t t
T T
π π ψ
π π
⋅ ⋅ ⋅⎛ ⎞= − ⋅ ⋅ +⎜ ⎟⎝ ⎠
⋅ ⋅ ⋅⎛ ⎞= ⋅ ⋅⎜ ⎟
⎝ ⎠
(7)
gdzie: ( )x t , – prędkości ruchu postępowego odpowiednio w osiach X i Y. ( )y tAby móc wykorzystać zależność (7) należy przedstawić wszystkie parametry w fizycznych jednostkach. Przy implementacji krzywych założono, że wszystkie parametry odnoszące się do długości wyrażone zostaną w metrach, prędkości postępowe w m/s, prędkości kątowe w rad/s, czas w sekundach. Sterowanie każdego silnika ograniczone jest do wartości z przedziału u∈ [-127; 127], u∈Z 4 co daje nam fizyczne prędkości wału ( dla każdego kierunku oraz z uwzględnieniem przekładni) z zakresu 0-200 obr/min (0–zerowa prędkość, ±127–maksymalna prędkość wału w kierunku zgodnym/przeciwnym do ruchu wskazówek zegara). Zatem jednostkowa zmiana sterowania u powoduje zmianę prędkości obrotowej oω o wartość 0dω = 1.5 obr/min. Prędkość obrotową można wyrazić wzorem (8).
0oobru dmin
ω ω⎡ ⎤
= ⋅ ⎢ ⎥⎣ ⎦
(8)
Stąd prędkość kątowa (ω ) w radianach na sekundę:
0260
radu ds
πω ω ⎡ ⎤= ⋅ ⋅ ⎢ ⎥⎣ ⎦ (9)
Korzystając z zależności wiążącej prędkość kątową ω i postępową V: V rω= ( r – promień koła - zębatki) oraz zależność (7) otrzymujemy: 4 – liczby całkowite Z

51
02 2( ) 1sin
2 2( ) 1cos
x x xx
y y yy
N A Nx t tr T T
N A Ny t tr T T r
π πω ψ
π πω
⋅ ⋅ ⋅⎛ ⎞= = − ⋅ ⋅ + ⋅⎜ ⎟⎝ ⎠
⋅ ⋅ ⋅⎛ ⎞= = ⋅ ⋅ ⋅⎜ ⎟
⎝ ⎠
r (10)
Ostatecznie podstawiając za xω , yω wyrażenie (9) mamy:
00
0
260 sin
260 cos
x x xx
y y yy
N A Nu tr d T T
N A Nu t
r d T T
π ψω
πω
⋅ ⋅⎛ ⎞= − ⋅ ⋅ +⎜ ⎟⋅ ⎝ ⎠⋅ ⋅⎛ ⎞
= ⋅ ⋅⎜ ⎟⋅ ⎝ ⎠
(11)
Wyrażenie 0
60r dω⋅
jest stałą ( = const), którą można wyliczyć przed wyliczaniem
na bieżąco sterowań w programie, co zmniejszy nakłady obliczeniowe mikrokontrolera.
37 10r −= ⋅ m
Dodatkowo, trzeba zauważyć, że ze względu na ograniczenia na sterowanie u, należy wyliczyć minimalny okres (T) obiegu krzywej, który nie wprowadza zniekształcenia w kształcie krzywej. Założenie: u∈ [-127; 127], u∈ . Funkcje sinus i cosinus przyjmują wartości ekstremalne ±1. ZStąd z równań (11) mamy:
( )0
60 1 127x xN Ar d Tω
⋅± ⋅ ± ≤
⋅± (12)
Zatem dla określonych parametrów wynosi: minT
0
60127x x
minN AT
r dω⋅
≥⋅
(13)
Przykładowo dla ruchu po okręgu o promieniu 100mm minimalny czas przejazdu nie może być mniejszy niż około 4.3 sekundy. Poniżej czasu (13) nie będzie możliwe wygenerowanie odpowiednich sterowań realizujących zadaną krzywą.

52
6 Pulpit operatorski Sterowanie testerem oraz systemem śledzenia wymaga bezpośredniej interakcji z użytkownikiem. Dodatkowo ważna jest możliwość podglądu lub zmiany parametrów. Istotnym elementem w tego typu aplikacjach jest też możliwość łatwego i szybkiego przeprowadzenia procedur sprawdzających poprawność działania wybranego urządzenia. Wszystkie powyższe potrzeby spełnia odpowiednio zaprojektowany pulpit operatorski przedstawiony na rysunku 47. Zbudowany w projekcie panel pełni jednocześnie funkcję centrum sterowania i łącznika pomiędzy poszczególnymi modułami urządzeń (tester, system śledzenia, komunikacja z PC, programowanie przez ISP/JTAG).
Rysunek 47 Panel operatorki – rzuty. 1-złącze DB37 (żeńskie) do testera, 2-przycisk wyłączający zasilanie
testera, 3-przyciski funkcyjne (LCD), 4-załączenie zasilania testera, 5-złącze systemu śledzeni, 6-złącze programatora ISP, 7-złącze programatora JTAG,
8-joystick, 9-mikroprzełączniki funkcyjne, 10-złącze DB9 do PC, 11-załączenie zasilania panelu, 12-zasilanie ~230V.
6.1 Część mechaniczna Jako obudowę dla pulpitu zastosowano obudowę z tworzywa sztucznego o wymiarach 25x18x8cm. Poszczególne wycięcia i otwory dla podzespołów zostały wyfrezowane.
6.2 Część elektroniczna
6.2.1 Zasilanie stanowiska laboratoryjnego Podstawą do pracy stanowiska jest zapewnienie właściwego zasilania. Dobór odpowiednich zasilaczy było poprzedzone oszacowaniem maksymalnych wartości prądów jakie mogą być pobrane przez poszczególne urządzenia. W konsekwencji wybrano i zakupiono zasilacz stabilizowany impulsowy (rysunek 48) o napięciu znamionowym 12V i maksymalnej wydajności prądowej do 3A. Najważniejsze parametry techniczne przedstawia tabela 10.

53
Rysunek 48 Widok zasilacza impulsowego.
Tabela 10: Parametry techniczne zasilacza
Parametr Wartość Maksymalny prąd obciążenia 3A
Nominalne napięcie wyjściowe 12V DC Napięcie zasilania 100-240V AC
Moc pobierana 50W Wymiary 92x39x28mm
W projekcie sterownik silników testera jest zasilany z oddzielnego zasilacza. Związane jest to z wyeliminowaniem ewentualnych zakłóceń elektrycznych powstałych podczas pracy silników.
6.2.2 Płyta główna z mikrokontrolerem ATmega 128 W pracy wykorzystano zintegrowany moduł firmy MikroVega [12] o oznaczeniu VE-APS-1406 z mikrokontrolerem ATmega128 w obudowie TQFP 64 taktowany zegarem zewnętrznym o częstotliwości 16MHz (X1 – rysunek 50). Wygląd modułu przedstawia rysunek 49. Poprzez zapewnienie na płytce odpowiednich wyprowadzeń i wbudowanych układów, moduł jest zdolny do pracy tuż po jego zasileniu. Nie wymaga stosowania dodatkowych modułów uruchomieniowych. Wyprowadzenia pozwalają na wygodne umieszczanie oraz wyjmowanie modułu w 64-stykowej podstawce precyzyjnej typu DIL 64P. Zaletą takiego rozwiązania jest możliwość stosowania modułu w różnych układach co sprzyja sprawnemu i szybkiemu testowaniu oprogramowania.
Rysunek 49 Widok płyty głównej ATmega128.

54
Układ z rysunku 49 pozwala na programowanie mikrokontrolera ATmega poprzez system ISP. Dodatkowo płytka posiada wyprowadzenia przygotowane pod system JTAG. Moduł zasilany jest napięciem 5V (producent dopuszcza zasilanie napięciem w zakresie od 2.7V do 5V). Bardzo ważna jest polaryzacja zasilania, gdyż płytka nie ma wbudowanego układu zapobiegającego niepoprawnemu jego podłączeniu, co może spowodować uszkodzenie całego modułu. Obecność poprawnego podłączenia zasilania sygnalizowane jest przez świecenie żółtej diody LED oznaczonej na obwodzie płytki drukowanej (rysunek 50) symbolem POWER.
Rysunek 50 Rozmieszczenie poszczególnych elementów na płytce drukowanej modułu.
VE-APS-1406 wyposażony jest w układ resetu procesora po włączeniu zasilania oraz w przycisk do ręcznego restartu. Wszystkie porty procesora są wyprowadzone na krawędzie płytki. Widok rozłożenia wyprowadzeń w złączach przedstawia rysunek 50. Często podczas testowania oprogramowania pojawia się konieczność zaobserwowania stanu danego bitu portu procesora. Stąd producent umieścił dodatkową diodę LED (czerwona) do siódmego wyprowadzenia portu B. Może być ona wykorzystana dowolnie. Zaświecenie diody powoduje stan niski pinu PB7. Należy wspomnieć, że moduł posiada wyprowadzenia wyjść portów szeregowych (UART0, UART1) z odpowiednią konwersją sygnałów do standardu RS232, którą zapewnia umieszczony na płytce układ MAX232. Dzięki temu możliwa jest bezpośrednia komunikacja procesora z komputerem PC, bez stosowania dodatkowych układów elektronicznych. Niestety podczas próby wykorzystania bezpośrednich sygnałów dla komunikacji szeregowej okazało się, że układ MAX232 nie działa poprawnie. Zatem wykorzystano zewnętrzny układ.
6.2.3 Układ załączania/wyłączania zasilania urządzenia ruchu Poprawna praca układu generującego ruch zależy od wielu czynników takich jak:
– Niezawodne działanie zderzaków (mikroprzełączniki); – Poprawna praca silników; – Poprawna praca sterownika silników; – Poprawna praca mikrokontrolera.
Powyższe warunki niosą za sobą konieczność zapewnienia odpowiedniego układu do wyłączenia oraz sekwencji kroków umożliwiających kontrolę nad załączeniem zasilania w przypadku błędnego działania jednego z wymienionych powyżej punktów. Na rysunku 51 przedstawiono zaprojektowany układ.

55
Rysunek 51 Schemat układu załączania/wyłączania zasilania silników.
Oznaczenia do rysunku 51: P1 – przycisk rozwierny (normalnie zamknięty) – wyłączający (stop awaryjny); P2 – przycisk zwierny (normalnie otwarty) – załączający; S1 – cewka sterująca przekaźnika; K1, K2, K3 – styki zwierne przekaźnika; T1 – tranzystor BC547; D1 – dioda prostownicza 1N4001; R1 – rezystor 1kΩ; R2 – rezystor 2kΩ;
– Załączenie zasilania silników Aby możliwe było podanie napięcia na sterownik silników musi być spełniona następująca sekwencja warunków:
– Zwolniony (podniesiony) przycisk awaryjny P1; – Podanie przez procesor zezwolenia na załączenie zasilania – załączenie klucza
tranzystorowego T1; – Wciśnięcie przycisku zwiernego P1 – potwierdzenie chęci załączenia zasilania
silników. Dwa pierwsze warunki muszą być spełnione przez cały czas działania silników. W układzie z rysunku 51 zastosowano potrzymanie zasilania cewki przekaźnika poprzez wykorzystanie jednej z pary jego styków (K1). Takie rozwiązanie jest często wykorzystywane w profesjonalnych układach załączania, co pozwala na użycie przycisku monostabilnego do startu.
– Wyłączenie zasilania silników W przypadku błędnej pracy urządzenia zadającego ruch istnieje możliwość automatycznego wyłączenia jego zasilania, aby uniknąć uszkodzenia mechanicznego lub elektrycznego. Odcięcie zasilania można dokonać na dwa sposoby – manualnie poprzez

56
wyłącznik awaryjny (P1) lub programowo poprzez wyłączenie klucza tranzystorowego T1 poprzez mikrokontroler.
Ważne jest, aby mikrokontroler posiadał informację o stanie zasilania na sterowniku silnika. Funkcję tę pełni wykorzystanie dodatkowej pary styków przekaźnika załączającego – napięcie załączone – poziom niski, napięcie wyłączone – poziom wysoki (podciągnięcie do plusa zasilania poprzez rezystor R2). Przy wyłączaniu zasilania cewki przekaźnika indukują się prądy wsteczne, które mogą uszkodzić tranzystor T1, dlatego w celu ochrony przed jego zniszczeniem stosuje się diodę półprzewodnikową D1 podłączoną jak pokazano na rysunku 51. W zwykłych zastosowaniach rzadko spotyka się przekaźniki o trzech stykach zwiernych, stąd zastosowano w pracy dwa przekaźniki o dwóch parach styków połączonych kaskadowo.
6.2.4 Układ konwersji sygnałów z czujników Zastosowane do systemu śledzenia fotoprzekaźniki zwracają wartość cyfrową a poziom sygnału zależy od napięcia zasilania (więcej w rozdziale 3.4). Tu czujniki zasilane są napięciem 12V, stąd informacja z czujników ma poziom napięcia 0V lub 12V. Poziomy napięć sygnałów używane w mikrokontrolerach to poziomy TTL (0V-5V). W standardzie TTL poziom cyfrowej jedynki reprezentuje zakres napięć 2.4V-5V; zera 0V-1.6V. Istnieje zatem potrzeba konwersji różnych wartości napięć do wartości standardowych. W pracy jako konwertera wykorzystano prosty układ oparty na diodzie Zenera, który przedstawia rysunek 52.
Rysunek 52 Układ konwersji napięć.
gdzie: D1 – dioda Zenera 3.6V; R1 – rezystor 2kΩ;
weU – napięcie konwertowane – zakres wartości 0V-12V;
wyU – napięcie o poziomie TTL. Układ musi utrzymywać zakres napięć na poziomie TTL, dlatego zastosowano diodę na stabilizacyjną na napięcie 3.6 (zakres jedynki logicznej TTL).
wyU
Rezystor R1 służy do ograniczenia wartości prądu płynącego przez diodę D1. Jego wartość wyliczona została tak, aby dla = 12V, dioda pracowała jako stabilizator napięcia 3.6V. weU
6.2.5 Magistrala I2C Sposób przesyłania informacji pomiędzy urządzeniami jest jedną z najważniejszych spraw, które należy rozważyć przy projektowaniu rozproszonych systemów. W pracy komendy sterujące pracą silników oraz sonaru przesyłane są przy użyciu szeroko dziś rozpowszechnionej w elektronice magistrali I2C. Poniżej opisano magistralę oraz protokół transmisji w standardzie I2C na podstawie [14].

57
I2C to szeregowa, dwukierunkowa magistrala służąca do przesyłania danych w urządzeniach elektronicznych. Została opracowana przez firmę Philips na początku lat 80. Znana również pod nazwą IIC, (Inter-Intergrated Circuit). I2C do transmisji wykorzystuje dwie dwukierunkowe linie: SDA (linia danych, ang. Serial Data Line) i SCL (linia zegara, ang. Serial Clock Line). Obydwie linie są na stałe podciągnięte do źródła zasilania poprzez rezystory podciągające (ang. pull-up). I2C używa logiki dodatniej, a więc stan niski na magistrali odpowiada "0" logicznemu, natomiast stan wysoki "1" logicznej. Poniżej przedstawiona jest przykładowa ramka danych.
Rysunek 53 Ramka danych protokołu I2C.
Podstawowa wersja I2C zakłada istnienie tylko jednego urządzenia, które może inicjować transmisję (master), ale dzięki istnieniu mechanizmu detekcji kolizji, możliwa jest praca w trybie multi-master. Ponieważ dane nadawane są w kolejności od najstarszego bitu do najmłodszego, w przypadku jednoczesnego nadawania, urządzenie nadające adres o wyższym numerze wycofa się pierwsze, co wynika z binarnego sposobu zapisywania liczb. Występuje tu zatem arbitraż ze stałym przydziałem priorytetów, określonym przez adres urządzenia typu slave. Urządzenia o niższych adresach mają wyższy priorytet od urządzeń o adresach wyższych. Zmiana na linii danych podczas transmisji może następować jedynie, gdy linia zegara znajduje się w stanie niskim. Nie dotyczy to specjalnych sytuacji: bitu startu i bitu stopu. Bit startu ma miejsce, gdy linia danych zmienia swój stan z "1" na "0", podczas wysokiego stanu linii zegara, co ma miejsce w momencie rozpoczynania każdej transmisji danych. Po zakończeniu transmisji generowany jest bit stopu, czyli przejście linii danych w stan wysoki przy wysokim stanie linii zegara. Pierwszym bajtem, przy transmisji, jest zawsze nadawany przez urządzenie master adres urządzenia slave, który oprócz 7 bitów właściwego adresu zawiera bit kierunku transmisji na najmłodszej pozycji. Wartość "0" tego bitu oznacza transmisję od slave'a do mastera, podczas gdy wartość "1" kierunek przeciwny. Po pierwszym bajcie przesyłane zostają dane.
6.2.6 Mini-joystick Do ręcznego sterowania osi XY testera użyto joysticka przedstawionego na rysunku 54. Tego typu rozwiązanie pozwala na płynne zadawanie prędkości i kierunku obrotów silników w obu osiach jednocześnie w zależności od kąta wychylenia gałki joysticka.

58
Rysunek 54 Joystick a) widok, b) sygnały.
Urządzenie oparte jest na dwóch precyzyjnych potencjometrach (dla każdej osi). Zasilenie układu pozwala na uzyskiwanie napięć z zakresu 0-5V proporcjonalnych do wychylenia od punktu neutralnego (0V – maksymalne wychylenie w lewo/dół, 5V – maksymalne wychylenie w prawo/górę). Tabela 11 przedstawia wartości rezystancji potencjometrów w poszczególnych osiach w zależności od wychylenia gałki od pozycji neutralnej.
Tabela 11: Zależność rezystancji od wychylenia gałki joysticka. Pozycja gałki Rezystancja [kΩ]
max X+ 4.86 max X- 0.56
neutralna X 3.88 max Y+ 4.86 max Y- 0.17
neutralna Y 3.19
6.2.7 Wyświetlacz LCD Do wyświetlania informacji o stanie pracy każdego z urządzeń stanowiska użyto wyświetlacza LCD 4x16 (cztery linie po 16 znaków każda), który został wbudowany w pulpit operatorski. Widok wyświetlacza przedstawia rysunek 55. Szczegółowa specyfikacja wyświetlacza przedstawiona jest w Dodatku B do projektu na końcu pracy.
Rysunek 55 Wyświetlacz LCD 4x16.
Obsługa programowa wyświetlacza odbywa się w sposób standardowy dla typowych wyświetlaczy alfanumerycznych. Pewną ciekawostką jest tu fakt, iż wyświetlacz traktowany jest nie jako 4x16 znaków, ale jako 2x32 znaki (1 x pierwsze 16 znaków – linia 1, 1 x drugie 16 znaków – linia 3, 2 x pierwsze 16 znaków – linia 2, 2 x drugie 16 znaków – linia 4).

59
7 Oprogramowanie
7.1 Oprogramowanie dla mikrokontrolera
Oprogramowanie mikrokontrolera Atmega 128 zostało napisane w darmowym środowisku programistycznym AVR Studio w wersji 4.12. Do kompilowania poszczególnych modułów wykorzystano kompilator AVR GCC. Środowisko to zostało wybrane nie tylko ze względu na produkt typu open-source, ale także z powodu możliwości współpracy z zewnętrznym układem JTAG, który umożliwia debuggowanie mikrokontrolerów rodziny AVR, a co za tym idzie, znacznie ułatwia pracę i testowanie napisanych programów. Dodatkowym atutem pakietu jest posiadanie softwareowego symulatora procesorów. Zanim zakupiono właściwy debugger JTAG, programowano mikrokontroler poprzez programator ISP przy użyciu darmowego oprogramowania ISPROG. Programowanie w ten sposób nie dawało możliwości debuggowania, co utrudniało pracę, dlatego zdecydowano się na zakupienie układu JTAG, które w dużej mierze przyśpieszyło testowanie oprogramowania dla Atmegi. Całość programu dla procesora AVR została napisana w języku C dla mikrokontrolerów. Pewne standardowe funkcje obsługi urządzeń (magistrala I2C, podstawowe funkcje wyświetlacza LCD) nie były pisane osobiście. Wykorzystano tu sprawdzone, napisane w optymalny sposób funkcje zaczerpnięte z literatury [7]. Cały algorytm sterowania, komunikacji z komputerem zostały opracowane na podstawie własnych pomysłów z myślą o funkcjonalności działania i łatwości obsługi przez użytkownika. W programie można wyróżnić dwie warstwy – warstwę podstawową i nadrzędną. Do warstwy podstawowej zaliczamy procedury obsługi poszczególnych urządzeń i modułów. Tu należy wymienić funkcje sterujące pracą silników, odczytujące informację z czujników, sonaru, obsługi zdarzeń na wciśnięcie danego przycisku lub zadziałanie joysticka. Warstwa wyższa odpowiedzialna jest za komunikację z komputerem, interakcje z użytkownikiem. Na rysunkach 56 i 57 przedstawiono podstawowe bloki oraz funkcje pełnione przez mikrokontroler.
Rysunek 56 Sterownik – podstawowe bloki.

60
Rysunek 57 Sterownik – główne funkcje.
Komunikacja z PC odbywa się przez łącze szeregowe RS232. Dane z mikrokontrolera są przesyłane jako ramki danych (rysunek 58). Każda ramka rozpoczyna się znakiem zachęty ‘>’, po którym przesyłanych jest pięć wartości – liczby zapisane w kodach ASCII – oddzielonych znakiem średnika.
Rysunek 58 Ramka danych przesyłana przez mikrokontroler do PC.
Oznaczenia elementów ramki danych z rysunku 58: ‘>’ – znak początku ramki; ‘;’ – średnik jako separator pól; Status – status obiektu; rozmiar: 1 znak ASCII. Pole Status może przyjmować następujące wartości: ‘W’ – obiekt na wprost czujników; ‘P’ – obiekt na prawo; ‘L’ – obiekt na lewo; ‘B’ – nie znaleziono obiektu. R – odległość znalezionego obiektu od systemy śledzenia. Rozmiar pola – trzycyfrowa
liczba. Promień R jest zawsze liczbą nieujemną. φ – kąt w stopniach pod jakim ustawiona jest głowica z czujnikami. Rozmiar pola – trzycyfrowa liczba .Kąt φ może przyjmować wartości całkowite z przedziału 0-180. Xr – rzeczywiste położenie (od położenia zerowego) obiektu w osi X podane w
milimetrach. Rozmiar pola – trzycyfrowa liczba; Xr – zawsze liczba nieujemna. Yr – rzeczywiste położenie (od położenia zerowego) obiektu w osi Y podane w
milimetrach. Rozmiar pola – trzycyfrowa liczba; Yr – zawsze liczba nieujemna.

61
7.2 Oprogramowanie dla komputera PC
Opracowanie własnego sposobu testowania systemu śledzenia oparte na porównywaniu położeń rzeczywistego i widzianego przez system pociągało za sobą konieczność stworzenia odpowiedniego oprogramowania dla komputera PC. Interfejs aplikacji wykonany został w darmowej wersji Borland C++ Builder 6 Personal Edition. Wybór tego środowiska programistycznego związany był przede wszystkim z możliwością stworzenia w łatwy i sprawny sposób aplikacji do wizualizacji danych sensorycznych. Podczas pisania programu miano na uwadze prostotę i funkcjonalność interfejsu, tak by w sposób intuicyjny możliwe było jego obsługiwanie. Komunikacja ze stanowiskiem odbywa się poprzez transmisję szeregową RS232 [8]. Rozpoczęcie/zakończenie transmisji możliwe jest przez wybór opcji „Otwórz port”/”Zamknij por”. Po zebraniu informacji opcją „Zapisz rysunek” można zapisać na dysku bieżący widok sceny. Opcja „Zakończ” zamyka program. Aplikacja składa się z dwóch zakładek, na których wyświetlane są niezbędne informacje kontrolno-pomiarowe. Na głównej zakładce (rysunek 59) wyświetlany jest obraz będący odzwierciedleniem rzeczywistego stanu testera oraz systemu śledzącego. Program umożliwia wyrysowywanie dwóch ścieżek. Pierwsza dotyczy rzeczywistego położenia poruszającego się przedmiotu na testerze (niebieski punkt – rysunek 59) . Druga związana jest tym, co „widzi” system namierzania (czerwony punkt – rysunek 59). Nie implementowano tu algorytmów, które analizują jakość śledzenia. Zadanie to pozostawiono osobie przeprowadzającej eksperyment, która sama ocenia jakość wykrywania i podążania za znalezionym obiektem. Obok rysowanej sceny przedstawiony jest bieżący status obiektu – odległość, kąt, kierunek ruchu. Wszystkie dane wyświetlane są w jednostkach zwracanych przez urządzenia pomiarowe. Orientacja głowicy z czujnikami podawana jest jako kąt z zakresu 0-180˚, gdzie 0˚ - obiekt 90˚ na prawo, 90˚ - obiekt prostopadle przed systemem śledzenia, 180˚ - obiekt 90˚ na lewo. Pole „kierunek poruszania się obiektu” pokazuje zmianę stanu obiektu w stosunku do systemu śledzenia (poruszenie się w prawo, w lewo, albo na wprost przed systemem).

62
Rysunek 59 Okno programu PC do wizualizacji – zakładka „Rysunek”.
Na drugiej zakładce wyświetlane są na bieżąco dane odbierane od mikrokontrolera na podstawie ustalonego protokołu transmisji. Dane te są odpowiednio analizowane (filtrowanie błędnych pomiarów, skalowanie) a następnie wizualizowane.

63
Rysunek 60 Okno programu PC do wizualizacji – zakładka „Dane odczytywane”.
Przed nawiązaniem komunikacji z mikrokontrolerem należy ustawić odpowiednie parametry dla testera i systemu śledzenia. Zmiana parametrów następuje przez opcję „Ustawienia” w menu głównym programu. Wyświetlone zostaje okienko z zakładkami do wyboru odpowiednich ustawień (rysunek 61).

64
Rysunek 61 Zakładki menu „Ustawienia”.
Zakładka:
– Transmisja – wybór portu komunikacyjnego COM; – Siatka – dopasowanie siatki oraz rozmiaru rysunku w oknie programu; – XOY śledzenia – położenie systemu śledzenia przy testerze, przedstawiany jako
zielony punkt na scenie (rysunek 59); – Obiekt – rozmiar (promień) śledzonego obiektu; – Tester – ustawienie tzw. strefy martwej dla testera (odległości silników od
krawędzi bocznych testera).

65
8 Eksperymenty
Eksperymenty podzielono na dwie części. Część pierwsza dotyczy eksperymentów z zadawaniem trajektorii dla testera, część druga dotyczy jakości śledzenia zbudowanego systemu. Podczas eksperymentów elementy składowe stanowiska były ustawione jak pokazuje rysunek 62.
Rysunek 62 Położenie elementów składowych stanowiska laboratoryjnego.

66
8.1 Tester
W rozdziale tym przedstawiono wyniki eksperymentów z zadawaniem trajektorii dla testera. Założono poruszanie się po dwóch odpowiednio sparametryzowanych krzywych – okręgu i ósemce. Ze względu na sterowanie prędkościami silników, podczas eksperymentów nie uwzględniano położenia początkowego 0ξ , 0η . Ruch wózka testera po zadanej ścieżce odbywał się od jego aktualnego położenia. Dla uproszczenia parametryzacji krzywych Lissajous podczas eksperymentów wyzerowano położenie wózka.
8.1.1 Okrąg Tabela 12: Parametry krzywej Lissajous.
Parametr Wartość Amplituda osi X xA 100 mm Amplituda osi Y yA 100 mm
Orientacja krzywej 0ψ 0 rad Liczba powtórzeń xN 1 Liczba powtórzeń yN 1
Czas ruchu T 30 s
Rysunek 63 Wynik eksperymentu - ruch po okręgu.

67
8.1.2 Ósemka Tabela 13: Parametry krzywej Lissajous.
Parametr Wartość Amplituda osi X xA 100 mm Amplituda osi Y yA 200 mm
Orientacja krzywej 0ψ 0 rad Liczba powtórzeń xN 1 Liczba powtórzeń yN 2
Czas ruchu T 30 s
Rysunek 64 Wynik eksperymentu – ruch po ósemce.
Na podstawie rysunków 63, 64 widać, że ruchomy wózek podąża za zadaną ścieżką – co było celem eksperymentu. Niestety momentami istnieje kilkumilimetrowa różnica pomiędzy rzeczywistym a teoretycznym położeniem wózka w danej chwili czasowej. Może to być spowodowane między innymi różnymi oporami na prowadnicach dla osi X i Y (oś Y jest bardziej obciążona). Ponadto korzystamy tu z automatycznej regulacji prędkości obrotów silników dostępnej poprzez sterownik MD23. Nie znamy typu ani parametrów zaimplementowanego tam regulatora. Sporadycznie pojawiły się też punkty daleko odbiegające od zadanej ścieżki. Jest to wynikiem pojawienia się w rejestrach enkoderowych sterownika MD23 zakłóconych wartości podczas pracy silników. Jak wspomniano, punkty te występują rzadko i można je wyeliminować przez prosty filtr odrzucający wartości bardzo odbiegające od wcześniejszych (filtr medianowy).

68
8.2 Śledzenie
W rozdziale tym przedstawiono wyniki testowania systemu śledzenia zbudowanego w oparciu o założenia z rozdziału 2.2. Obiektami śledzonymi były cylindry o średnicach: 75mm, 110mm, 160mm. Na zewnątrz cylindrów nakładano odpowiednio przygotowane tkaniny, tak by móc przetestować skuteczność śledzenia dla różnych powierzchni obiektów. Należy zauważyć, że mamy tu dwa różne układy współrzędnych (rysunek 65).
Rysunek 65 Układy współrzędnych testera (XtOYt) i systemu śledzenia (XsOYs).
Zatem, aby móc porównać ścieżkę śledzoną przez system namierzania z rzeczywistym ruchem obiektu należało odpowiednio przeliczyć wyniki każdego pomiaru. Wszystkie pomiary przedstawione zostały w układzie współrzędnych testera. Współrzędne systemu śledzącego w tym układzie mają postać:
( )( )
cos
sin
xt R XT
yt R YT
α
α
= +⎧⎪⎨
= +⎪⎩ (14)
gdzie: XT, YT są współrzędnymi środka układu XsOYs odpowiednio w osi X i Y systemu śledzącego w układzie współrzędnych testera.

69
8.2.1 Badanie wpływu rodzaju oświetlenia oraz koloru i faktury obiektu na jakość śledzenia
W rozdziale opisano wyniki testów wykonanych dla dwóch rodzajów czujników optycznych (WT18 i VTE18). Przedstawione tu pomiary zostały uzyskane przez śledzenie obiektów o różnych kolorach (biały, niebieski, czerwony, czarny) i powierzchni (matowa, błyszcząca). Ponadto sprawdzano zachowanie systemu przy świetle dziennym (światło białe – słońce) i stroboskopowym (światło białe, częstotliwość błyskania: 10Hz). Średnica obiektu śledzonego to 160mm. Ruch obiektu odbywał się po linii prostej (tylko w osi Y) ze stałą prędkością. Oznaczenia na rysunkach:
- widok z systemu śledzenia - rzeczywiste położenie
– Czujniki VTE18
Rysunek 66 Śledzenie obiektu w kolorze białym, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

70
Rysunek 67 Śledzenie obiektu w kolorze niebieskim, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.
Rysunek 68 Śledzenie obiektu w kolorze czerwonym, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

71
Rysunek 69 Śledzenie obiektu w kolorze czarnym, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.
Rysunek 70 Śledzenie obiektu w kolorze białym, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

72
Rysunek 71 Śledzenie obiektu w kolorze niebieskim, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.
Rysunek 72 Śledzenie obiektu w kolorze czerwonym, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

73
Rysunek 73 Śledzenie obiektu w kolorze czarnym, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.
– Czujniki WT18
Rysunek 74 Śledzenie obiektu w kolorze białym, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

74
Rysunek 75 Śledzenie obiektu w kolorze niebieskim, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.
Rysunek 76 Śledzenie obiektu w kolorze czerwonym, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

75
Rysunek 77 Śledzenie obiektu w kolorze czarnym, o matowej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.
Rysunek 78 Śledzenie obiektu w kolorze białym, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

76
Rysunek 79 Śledzenie obiektu w kolorze niebieskim, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.
Rysunek 80 Śledzenie obiektu w kolorze czerwonym, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym.

77
Rysunek 81 Śledzenie obiektu w kolorze czarnym, o błyszczącej powierzchni oraz
świetle a) dziennym, b) stroboskopowym. Na podstawie powyższych rysunków widać, że faktura powierzchni obiektu jest jednym z najistotniejszych czynników mających wpływ zarówno na wykrywanie jak i śledzenie obiektów. Dla powierzchni błyszczących znacznie zwiększa się zakres śledzenia – dla czujników VTE18 przewyższa on nawet nominalny zakres działania czujników (rysunki 70, 72). Kolejnym czynnikiem mającym wpływ na zakres pracy systemu jest kolor obiektu. Widać, że im ciemniejszy kolor, tym mniejszy zakres widzenia czujników (rysunki 66, 67, 68, 69). Dodatkowy eksperyment z zastosowaniem światła stroboskopowego pokazał jak ważny jest rodzaj oświetlenia nie tylko dla systemu śledzenia opisywanego w projekcie, ale w ogóle dla czujników optycznych. Okazuje się, że zwykłe czujniki (VTE18) są zakłócane przez silne błyski światła (rysunki 66b, 67b, 68b, 69b, 70b, 71b, 72b, 73b). Natomiast eksperymenty z czujnikami WT18 pokazały, że można skutecznie walczyć z tymi zakłóceniami (rysunki 74b, 75b, 76b, 77b, 78b, 79b, 80b, 81b), jednak wymaga to zastosowania odpowiednich filtrów oraz wbudowanego systemu mikroprocesorowego, który eliminuje wpływ oświetlenia otoczenia na wykrywanie obiektów. Należy też zauważyć, że w przypadku czujników WT18 nie widać dużego wpływu koloru obiektu na zakres jego wykrywania (rysunki 74, 75, 76, 77, 78, 79, 80, 81).

78
8.2.2 Badanie wpływu rozmiaru śledzonego obiektu na jakość śledzenia W rozdziale przedstawiono wyniki uzyskane z systemu śledzenia dla różnych średnic obiektów. Oznaczenia na rysunkach:
- widok z systemu śledzenia - rzeczywiste położenie
Rysunek 82 Śledzenie walca o średnicy 75mm a) ruch w lewo, b) ruch w prawo.
Rysunek 83 Śledzenie walca o średnicy 110mm a) ruch w lewo, b) ruch w prawo.

79
Rysunek 84 Śledzenie walca o średnicy 160mm a) ruch w lewo, b) ruch w prawo
. Na podstawie rysunków 82, 83 i 82 widać, że im mniejsza średnica walca, tym mniejsza rozbieżność położenia rzeczywistego i widzianego przez system. Takie zachowanie jest spowodowane tym, że system traktuje śledzony obiekt jak punkt materialny i nie uwzględnia jego szerokości. Im większa szerokość obiektu, tym większa kątowa strefa nieczułości systemu śledzenia.

80
8.2.3 Badanie systemu śledzenia w zależności od różnych ścieżek poruszania się obiektu
Oznaczenia na rysunkach: - widok z systemu śledzenia - rzeczywiste położenie
Rysunek 85 Śledzenie prostej. Parametry: Ax=100mm, Ay=200mm,
Nx=1, Ny = 1, ψ = π/2, T = 30s.
Rysunek 86 Śledzenie okręgu o promieniu 100mm.
Ax=100mm, Ay=100mm, Nx=1, Ny = 1, ψ = 0, T = 30s.

81
Rysunek 87 Śledzenie ósemki. Ax=100mm, Ay=200mm, Nx=1, Ny = 2, ψ = 0, T = 30s.
Rysunek 88 Śledzenie krzywej sinusoidalnej. Ax=100mm, Ay=200mm, Nx=2, Ny = 1, ψ = 0, T = 30s.
Na podstawie rysunków 85, 86, 86 i 88 widać, że system był w stanie śledzić każdą z zadanych ścieżek. Najmniejsze błędy śledzenia są dla prostej (rysunek 85) oraz krzywej z rysunku 88. Na podstawie obserwacji powyższych rysunków można wywnioskować, że jakość śledzenia jest lepsza tam, gdzie tor ruchu ma niewielkie zakrzywienia. Może być to spowodowane faktem, iż w tych miejscach następował większy przyrost prędkości obiektu. Dodatkowe błędy mogą być spowodowane traktowaniem obiektu jako punktu materialnego a nie jako przedmiotu o określonej szerokości (rozdział 8.2.2).

82
9 Podsumowanie
Celem projektu było opracowanie prostego systemu śledzenia w przestrzeni 2D, który umożliwiłby zastąpienie systemów wizyjnych w aplikacjach, które by na to pozwalały. Efektem pracy jest zbudowany system oparty na dwóch fotoprzekaźnikach oraz sonarze. Takie rozwiązanie pozwala na określenie zarówno kierunku ruchu, jak i odległości śledzonego obiektu. Przeprowadzone eksperymenty potwierdziły fakt, iż możliwe jest śledzenie obiektów bez użycia kamer i skomplikowanych algorytmów. Zaletą zbudowanego systemu śledzenia jest jego prostota zarówno pod względem budowy jak i sterowania. Do wad należy zaliczyć niemożność określenia kształtu obiektu śledzonego oraz zależność wyników od rozmiaru obiektu. Projekt wymagał przeprowadzenia eksperymentów, które pozwoliłyby na rzetelną ocenę jakości śledzenia. Tu wyłoniła się potrzeba skonstruowania odpowiedniego testera – urządzenia generującego zadany ruch na płaszczyźnie poziomej. Mimo, że tester nie był celem pracy to jego budowa pochłonęła znaczną część czasu poświęconego na projekt – głównie związane to było z występowaniem wpływu zakłóceń powstających podczas pracy silników na sygnały z enkoderów. Jednak końcowy efekt prac okazał się zadowalający. Zaprojektowanie odrębnych urządzeń – systemu śledzenia i testera pozwala na dalszą rozbudowę każdego z modułów z osobna. Dodatkowo tester stwarza szerokie możliwości dla nowych projektów. Przygotowanie odpowiedniego złącza testera daje w przyszłości możliwość współpracy stanowiska laboratoryjnego ze środowiskiem matematycznym Matlak za pośrednictwem karty wejść-wyjść (np. RT-DAC4) [15]. Zapewnienie komunikacji sterownika stanowiska poprzez protokół szeregowy RS232 z komputerem oraz stworzenie odpowiedniego oprogramowania dla PC, wizualizującego obraz rzeczywistej sceny, pozwala eksperymentatorowi w łatwy sposób analizować jakość śledzenia.

83
Literatura
[1] http://www.robot-electronics.co.uk/htm/emg30.htm – specyfikacja silników EMG30 [2] http://www.robot-electronics.co.uk/htm/md23tech.htm – specyfikacja sterownika MD23 [3] http://www.sick.com – specyfikacja czujników firmy SICK [4] Grajda M.: Pomiar przebiegu zmian prędkości podczas zderzeń pojazdów, Pomiary Automatyka Robotyka, 6/2004 [5] http://www.twt.com.pl, TWT Automatyka – podstawowe parametry czujników [6] http://www.wikipedia.pl, http://www.sciaga.pl – podstawowe informacje o czujnikach optycznych i ich typach. [7] Doliński J.: Mikrokontrolery AVR w praktyce, wydawnictwo BTC, Warszawa 2004 [8] Daniluk A.: RS23C2 Praktyczne programowanie, Wydawnictwo Helion, Gliwice, 2001 [9] Kajner K.:, Sterowanie robotem dwukołowym – badanie wybranych algorytmów,
Praca Magisterska, PWR, 2005 [10] Raabe Z.: Sterownik serwomechanizmów, Elektronika dla wszystkich – robotyka, kwiecień 1997 [11] http://www.robot-electronics.co.uk/htm/sfr08.htm – specyfikacja modułu sonaru SFR08 [12] http://www.mikrovega.pl – specyfikacja modułu płyty Atmega128 [13] http://www.akcesoria.cnc.info.pl/ [14] http://pl.wikipedia.org/wiki/I2C [15] Arent K., Mazur A., Wnuk M.: Koncepcja stanowiska do badania algorytmów
sterowania manipulatorów na obiekcie rzeczywistym przy użyciu środowiska Matlab/Simulink, INSTYTUT INFORMATYKI AUTOMATYKI I ROBOTYKI POLITECHNIKI WROCŁAWSKIEJ, Politechnika Wrocławska, raport serii SPR nr 10/2005

84
Dodatek A
Widok oraz rozmieszczenie elementów na płycie głównej elektroniki

85

86
Opis łączówek umieszczonych na płycie głównej z elektroniką
Wykorzystywane styki płyty mikrokontrolera ATmega128
Oznaczenie Opis
PA0 SCL (linia zegara) magistrali I2C; połączone z G4-2 lub G5-2, lub G6-2 PA1 SDA (linia danych) magistrali I2C; połączone z G4-3 lub G5-3, lub G6-3 PB0 Wejście cyfrowe dla czujnika SICK po prawej stronie systemu śledzenia
(patrząc od tylnej strony); połączone z P12 PB1 Wejście cyfrowe; informacja o załączeniu zasilania silników; połączone z P5 PB2 Wejście cyfrowe dla czujnika SICK po lewek stronie systemu śledzenia
(patrząc od tylnej strony); połączone z P11 PB5 Wyjście PWM dla serwa; połączone z P8 PB7 Wyjście cyfrowe – zezwolenie na załączenie zasilania silników; połączone z
P1 PC1 LCD; bit sterujący – instrukcja/dane PC2 LCD; bit sterujący – zapis/odczyt PC3 LCD; bit sterujący – enable PC4 LCD; bit danych – D4 PC5 LCD; bit danych – D5 PC6 LCD; bit danych – D6 PC7 LCD; bit danych – D7 PD0 Zderzak – strona przednia; połączone z P9-4 PD1 Zderzak – strona tylna; połączone z P9-3 PD2 Zderzak – strona lewa; połączone z P9-2 PD3 Zderzak – strona prawa; połączone z P9-1 PD4 Przycisk P1 pod LCD; połączone z P10-4 PD5 Przycisk P2 pod LCD; połączone z P10-3 PD6 Przycisk P3 pod LCD; połączone z P10-2 PD7 Przycisk P4 pod LCD; połączone z P10-1 PE0 Odbiór danych z portu szeregowego; połączone z P2-1 PE1 Nadawanie poprzez RS232; połączone z P2-2 PF0 Wejście analogowe; pomiar napięcia (proporcjonalnego do wychylenia) z osi
Y joysticka; połączone z P2-1 PF1 Wejście analogowe; pomiar napięcia (proporcjonalnego do wychylenia) z osi
X joystick; połączone z P2-2
Złącza do połączenia z wejściami i/lub wyjściami mikrokontrolera
Oznaczenie Opis P1 Wejście, zezwolenie na załączenie zasilania silników, 1-2 połączone

87
P2 Transmisja szeregowa: 1-R1OUT (sygnał odbiorczy z μK), 2-T1IN (sygnał nadawania z μK)
P3 Złącze dla przycisku awaryjnego – rozwierny P4 Złącze dla przycisku startu - zwierny P5 Info o załączeniu zasilania silników, 0V-zasilanie silników załączone, +5V-
wyłączone; 1-2 połączone P6 1-2 – sygnał z osi X joysticka
3-4 – sygnał z osi Y joysticka P7 Przycisk z joysticka P8 1-2 – sygnał sterujący serwomechanizmem P9 Zderzaki:
1-strona prawa, 2- strona lewa, 3-strona tylna, 4-strona przednia
P10 Przyciski pod LCD: 1-przycisk P4, 2-przycisk P3, 3-przycisk P2, 4-przycisk P1
P11 Czujnik SICK po lewej (patrząc od strony gniazd czujników); 1-2 połączone P12 Czujnik SICK po prawej (patrząc od strony gniazd czujników); 1-2
połączone P13, P4 Nieużywane
Sygnały wychodzące z urządzeń
G1 Zasilanie 12V silników; 1- +12V, 2-GND G2, G3 Dodatkowe wyprowadzenia zasilań – nieużywane; 1- +10.25V, 2-GND G4, G5, G6 Magistrala I2C:
1-GND, 2-SCL, 3-SDA, 4- +5V G7 Oś X joysticka:
1- , 2- , 3- G8 Oś Y joysticka:
1- , 2- , 3- G9 Przycisk joysticka G10 Serwomechanizm:
1-sygnał sterujący, 2- +5V, 3-GND G11 Czujnik SICK lewy:
1-GND, 2- +12V, 3-wyjście czujnika G12 Czujnik SICK prawy:
1-GND, 2- +12V, 3-wyjście czujnika G13 Zasilanie LCD:
1-kontrast, 2- +5V, 3-GND G14 Zderzaki – wejścia:
1-5 – prawy, 2-6 – lewy, 3-7 – tylny, 4-8 - przedni G15 Przyciski pod LCD – wejścia:
1 – przycisk P4, 2 – przycisk P3, 3 – przycisk P2, 4 – przycisk P1 Z1 Złącze do komunikacji RS232:
1-GND (masa sygnałowa) 2-TxD (nadawanie) 3-RxD (odbiór)
Z2 Zasilanie 12V dla elektroniki Z3 Zasilanie 12V dla silników (tester)

88
Dodatek B
Specyfikacja elementów
Oznaczenie
Element
Rezystory R1 1kΩ R5, R6 3.3kΩ R2-R4, R7-R17 2kΩ R18 Potencjometr 5kΩ Kondensatory C1, C2, C3, C4, C5 1μF C6 100μF C7, C8 0.33 μF C9, C10 0.1 μF C11 10μF Półprzewodniki Tranzystory T1 BC547 (NPN) Diody D1 LED zielona D2 LED czerwona D3 1N4001 D4, D5 Stabilizacyjne 3.6V L7800 Stabilizator napięcia 5V M1 Mostek Graetza 2W10, 2A/1000V Przekaźniki S1, S2 RM84-2012-35-1012, podwójne pary
zestyków (2 pary zwierne, 2 pary rozwierne)

89
Dodatek C
Rozmieszczenie elementów wewnątrz obudowy panelu operatorskiego
Oznaczenia: 1 – złącze DB37 testera; 2 – złącze zasilania 12V sterownika MD23; 4 – płyta sterownika MD23; 5 – płyta główna elektroniki; 6 – kable zasilaczy, ~230V; 7 – gniazdo zasilania ~230V; 8 – włącznik zasilania ~230V; 9 – zasilacze 12V; 10 – złącze DB9 (do komunikacji przez RS232); 11 – kable zasilania 12V.

90
Dodatek D
Wyświetlacz LCD