Politechnika Warszawska Wydział Samochodów i Maszyn...
197
Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018 dr inż. Sebastian Korczak Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/
Transcript of Politechnika Warszawska Wydział Samochodów i Maszyn...

Teoria maszyn i podstawy automatykisemestr zimowy 2017/2018
dr inż. Sebastian Korczak
Politechnika WarszawskaWydział Samochodów i Maszyn Roboczych
Instytut Podstaw Budowy MaszynZakład Mechaniki
http://www.ipbm.simr.pw.edu.pl/
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 2
Wykład 14
Powtórzenie materiału.Informacje o egzaminie.
Ankiety.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 3
Wykład 1
pary kinematyczne, mechanizmy,ruchliwość, więzy bierne
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 4
Stopnie swobody
2 st. swob.
3 st. swob.
3 st. swob.
6 st. swob.
punkt materialny (2D) bryła sztywna (2D)
bryła sztywna (3D)punkt materialny (3D)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 5
Pary kinematyczne i łańcuchy kinematyczne
Para kinematyczna – ruchome połączenie dwóch sztywnych elementów wywołujące ograniczenia ruchu względnego między nimi.
Łańcuch kinematyczny – połączenie co najmniej dwóch par kinematycznych.
Podstawa – nieruchomy człon mechanizmu.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 6
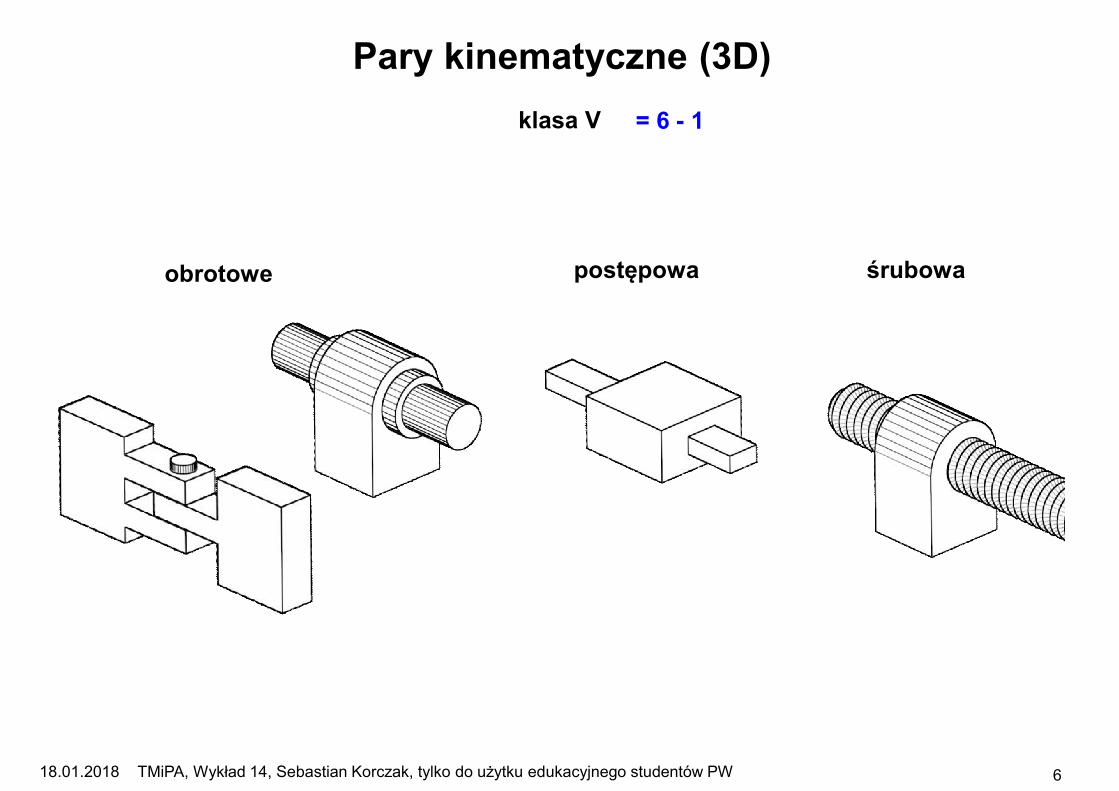
Pary kinematyczne (3D)
klasa V
obrotowe
= 6 - 1
postępowa śrubowa
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 7
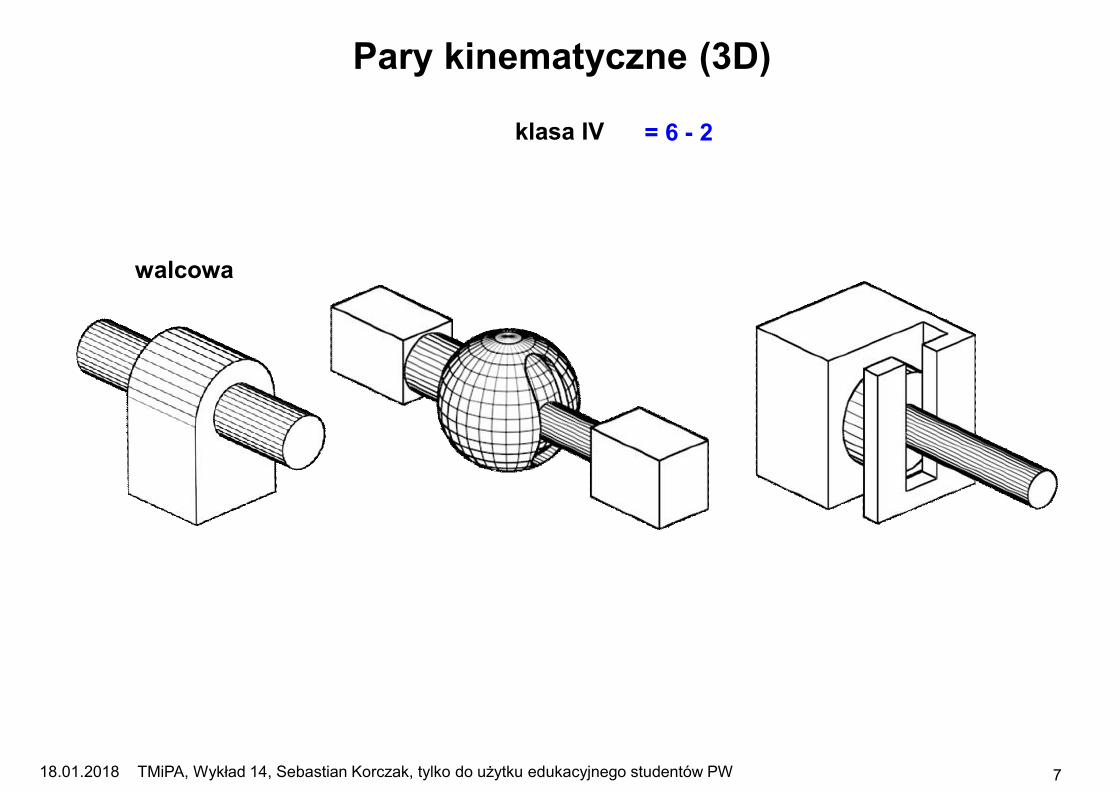
Pary kinematyczne (3D)
klasa IV
walcowa
= 6 - 2
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 8
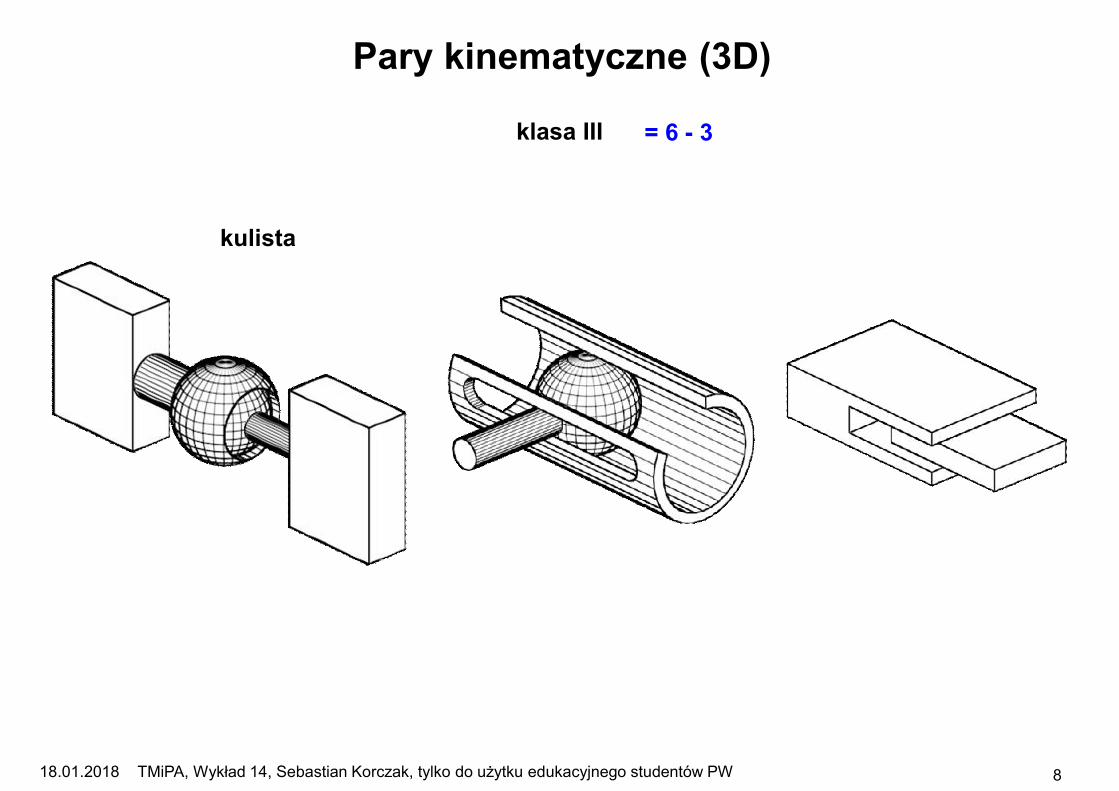
Pary kinematyczne (3D)
klasa III = 6 - 3
kulista

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 9
Pary kinematyczne (3D)
klasa II = 6 - 4
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 10
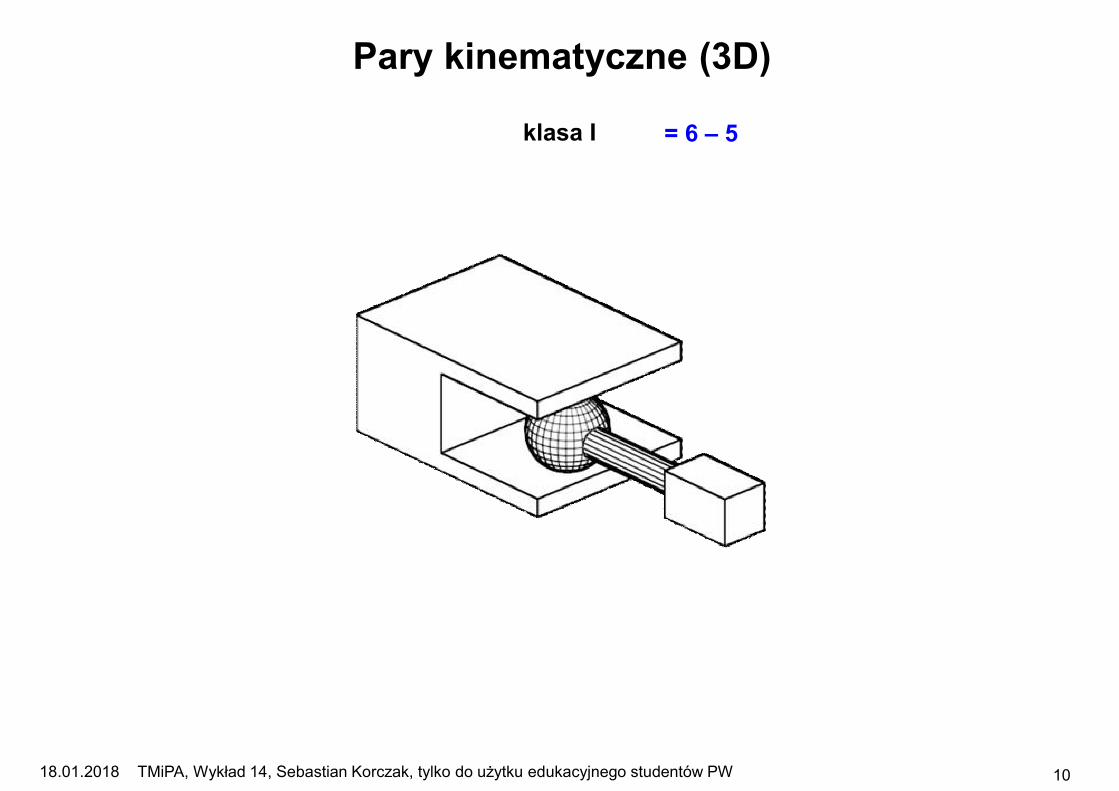
Pary kinematyczne (3D)
klasa I = 6 – 5
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 11
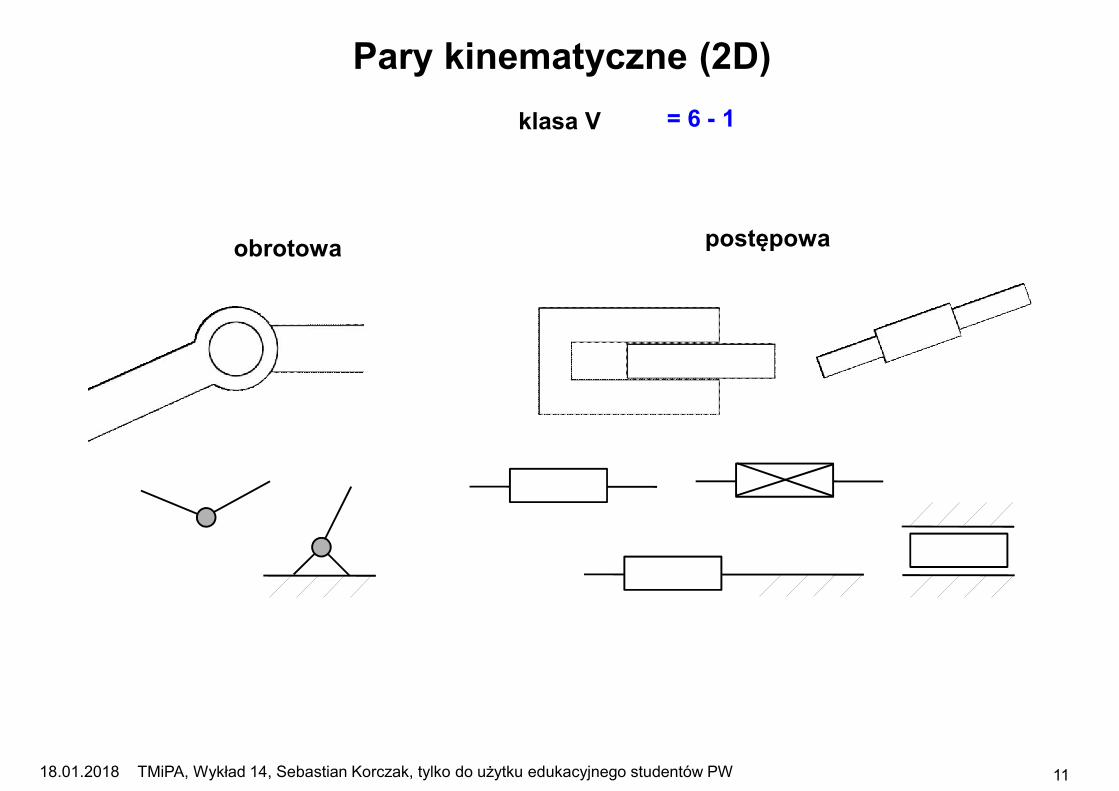
Pary kinematyczne (2D)
klasa V
obrotowa
= 6 - 1
postępowa
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 12
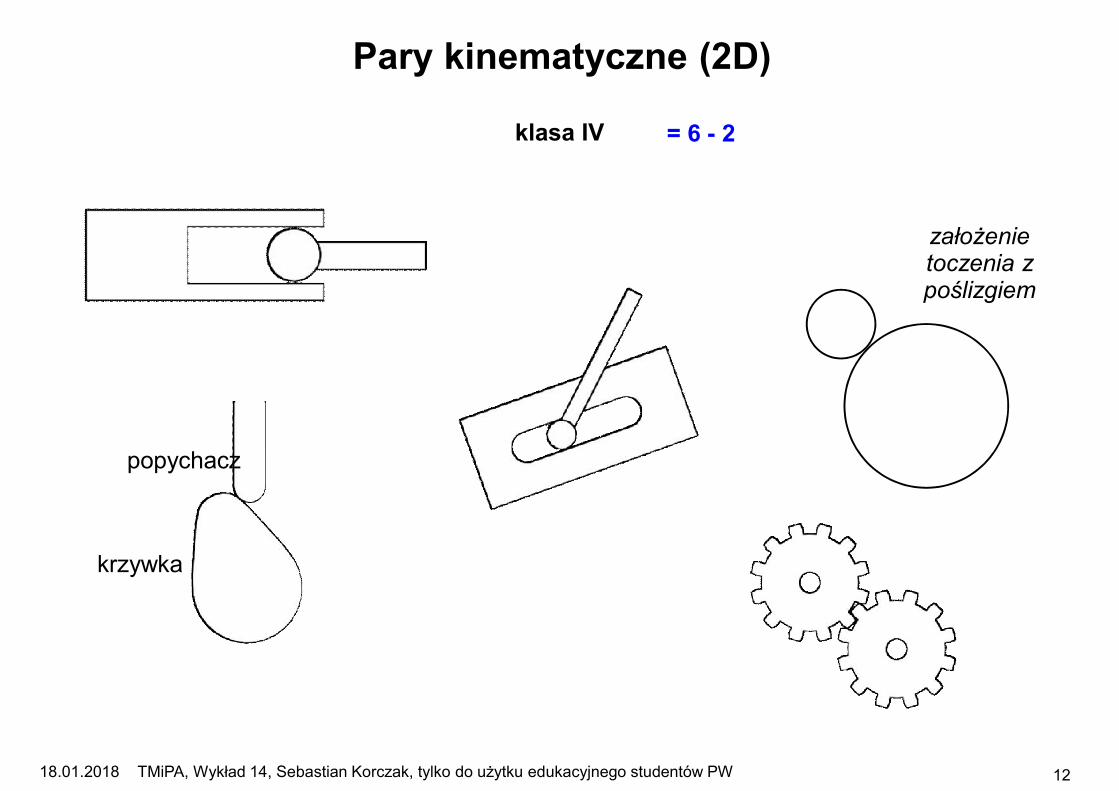
Pary kinematyczne (2D)
klasa IV = 6 - 2
krzywka
popychacz
założenie toczenia z poślizgiem

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 13
Pary kinematyczne
Para niższa – kontakt powierzchniowy
Para wyższa – kontakt punktowy bądź liniowy

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 14
Pary kinematyczne
Para zamknięta – zachowanie kontaktu poprzez geometrię
Para otwarta – kontakt zachowany z użyciem dodatkowej siły
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 15
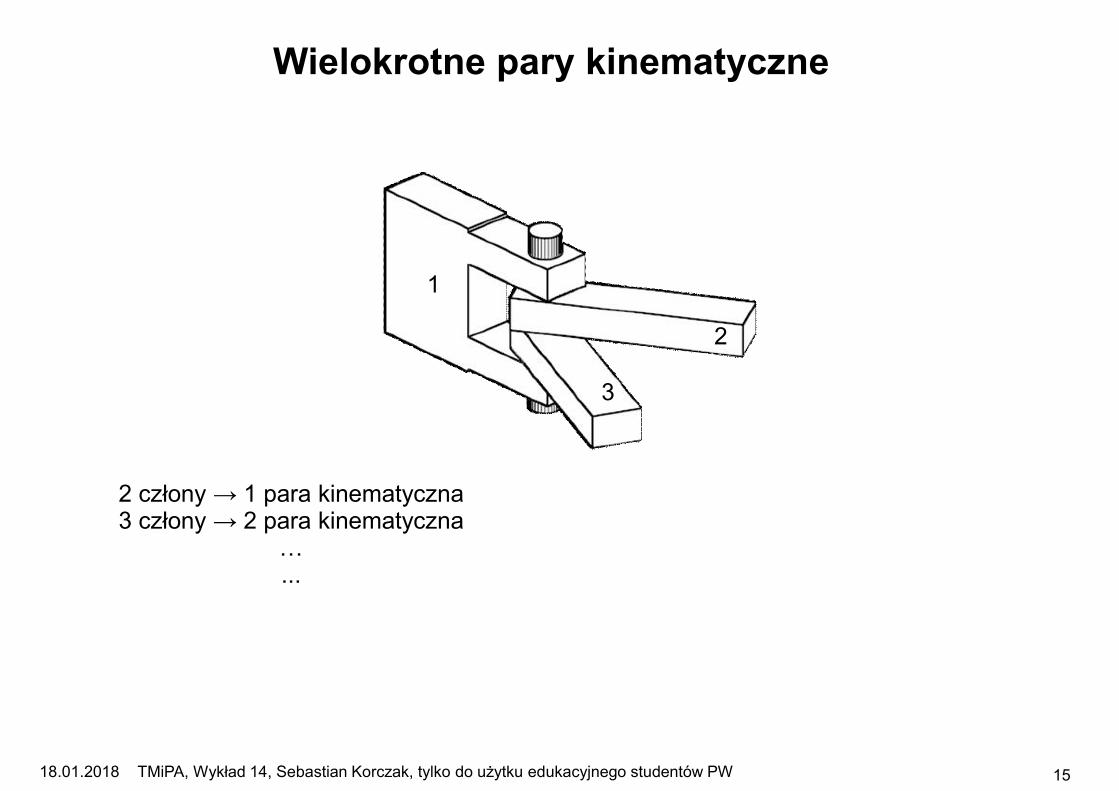
Wielokrotne pary kinematyczne
1
2
3
2 człony → 1 para kinematyczna3 człony → 2 para kinematyczna
…...
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 16
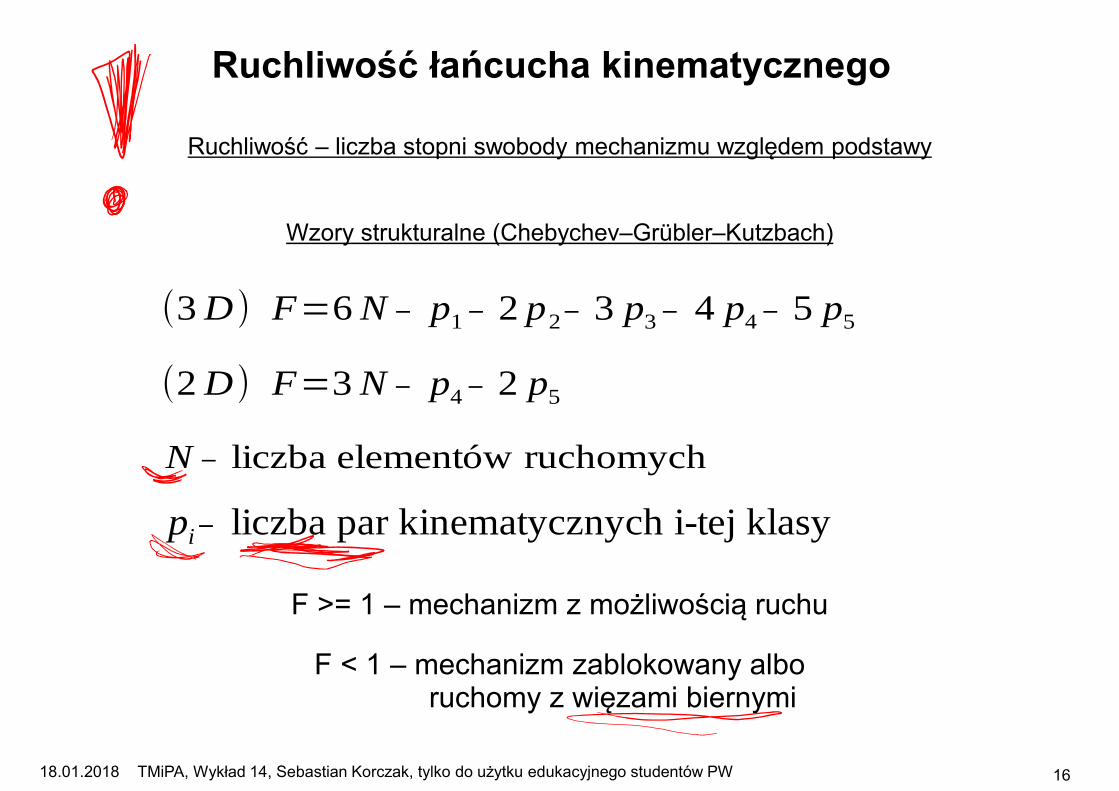
Ruchliwość łańcucha kinematycznego
Ruchliwość – liczba stopni swobody mechanizmu względem podstawy
Wzory strukturalne (Chebychev–Grübler–Kutzbach)
(3 D) F=6 N− p1− 2 p2− 3 p3− 4 p4− 5 p5
(2 D) F=3 N− p4− 2 p5
N− liczba elementów ruchomych
pi − liczba par kinematycznych i-tej klasy
F >= 1 – mechanizm z możliwością ruchu
F < 1 – mechanizm zablokowany alboruchomy z więzami biernymi
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 17
Wykład 2
Podział strukturalny mechanizmów,metody wyznaczania prędkości i przyspieszeń
mechanizmów płaskich.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 18
Klasyfikacja łańcuchów kinematycznych
Łańcuch kinematyczny prosty – każdy człon łańcucha wchodzi w nie
więcej niż dwie pary kinematyczne.
Łańcuch kinematyczny złożony – co najmniej jeden człon
mechanizmu wchodzi w więcej niż dwie pary kinematyczne.
Łańcuch kinematyczny otwarty – istnieją człony wchodzące tylko w
jedną parę kinematyczną.
Łańcuch kinematyczny zamknięty – żaden człon mechanizmu nie
wchodzi w skład tylko jednej pary kinematycznej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 19
Podział strukturalny mechanizmów
Grupa strukturalna – najprostszy łańcuch kinematyczny o ruchliwości
zero powstały z podziału mechanizmu.
Mechanizm płaski tylko z parami V klasy: F=3n − 2 p5=0
p5
n=
3
2=
6
4=
9
6=.. .
n=2 p5=3
II grupa strukturalna III grupa strukturalna
n=4 p5=6 n=6 p5=9
IV grupa strukturalna
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 20
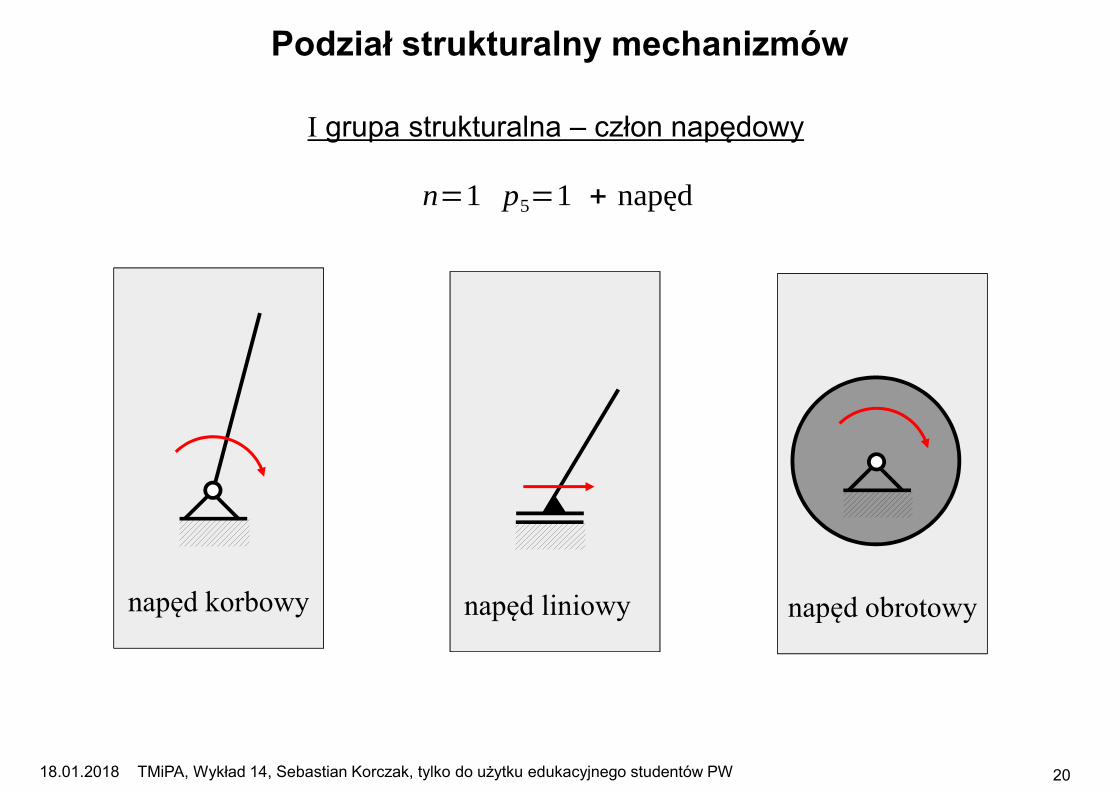
Podział strukturalny mechanizmów
napęd korbowy
I grupa strukturalna – człon napędowy
n=1 p5=1 + napęd
napęd liniowy napęd obrotowy
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 21
Kinematyka mechanizmów
Analiza kinematyczna mechanizmu – polega na wyznaczeniu
prędkości i przyspieszeń wybranych członów mechanizmu w
interesujących nas położeniach tego mechanizmu. Dana musi być
budowa mechanizmu (geometria członów, rodzaje par
kinematycznych) oraz sposób jego napędzania.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 22
Metody wyznaczania prędkościi przyspieszeń mechanizmów
Metody wykreślne Metoda analityczna
- metoda rzutów prędkości,
- metoda chwilowego środka obrotu,
- metoda chwilowego środka przyspieszeń,
- metoda prędkości obróconych,
- metoda rozkładu prędkości,
- metoda rozkładu przyspieszeń,
- metoda planu prędkości,
- metoda planu przyspieszeń.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 23
Metoda rzutów prędkości
Rzuty prędkości dwóch punktów bryły sztywnej na kierunek łączący
te punkty są sobie równe.
A
B
vA
vB

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 24
Metoda chwilowego środka obrotu
Z chwilowego środka obrotu widać końce wektorów prędkości
wszystkich punktów bryły sztywnej pod jednakowym kątem
względem prostej łączącej te punkty ze środkiem obrotu.
A
BvA
vB
S

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 25
Metoda rozkładu prędkości
Dowolny ruch płaski bryły sztywnej możemy przedstawić za pomocą
sumy ruchu postępowego i obrotowego.
AB
+AB
AB =
vB= v A+ v BA
Prędkość
bezwzględna
punktu B
Prędkość ruchu
postępowego całej bryły
Prędkość ruchu
obrotowego punktu B
względem punktu A
vBA=ω× AB
Przykład 2
ω

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 26
Metoda planu prędkości
Planem prędkości członu sztywnego nazywamy miejsce
geometryczne końców wektorów prędkości bezwzględnych członu
odłożonych z punktu zwanego biegunem planu prędkości. Plan
prędkości członu jest do niego podobny pod względem konfiguracji
punktów i obrócony o kąt 90o zgodnie ze zwrotem chwilowej
prędkości kątowej członu.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 27
Metoda planu prędkości
A
B
v A
vB
C
vC
vB
v A
Ov
a
b
c
90o
Przykład
Rysunek w skali! np.
Podziałka geometrii: 1cm→ 10cm
Podziałka wektorów: 1cm→ 1m/s
Dane: geometria, vA i vB
Szukane: vC
Inna podziałka geometrii!
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 28
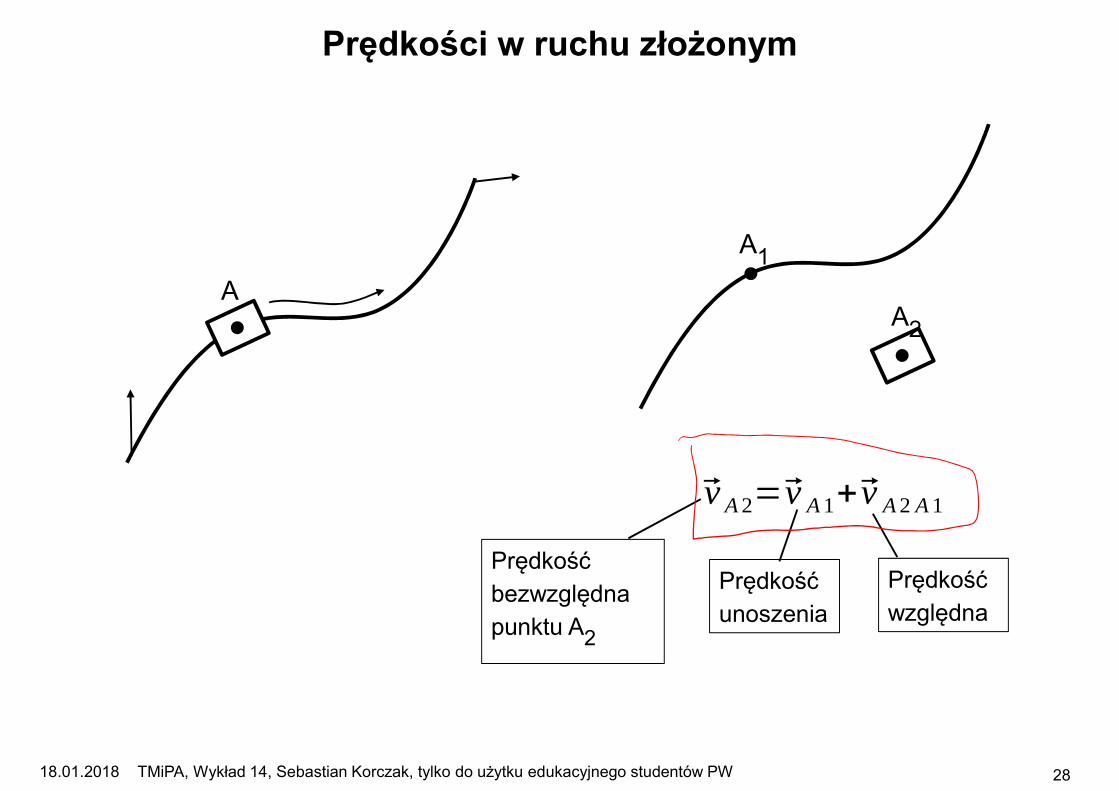
Prędkości w ruchu złożonym
A1
A2
v A2=v A1+ v A2 A1
Prędkość
bezwzględna
punktu A2
Prędkość
unoszenia
Prędkość
względna
A

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 29
Wykład 3
Metody wyznaczania przyspieszeń mechanizmów płaskich
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 30
Chwilowy środek przyspieszeń
A
BaA
aB
P
środek przyspieszeń
=arctg εω2
ψ
ψ
ψ

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 31
AB
A
Bω
+AB
=
aB=aA+ aBA=aA+ aBAn+ aBA
t
Przyspieszenie
bezwzględne punktu B
Przyspieszenie punktu B w
ruchu obrotowym względem A.
Metoda rozkładu przyspieszeń
Przykład
AB
ε+
Przyspieszenie bryły w
ruchu postępowym Przyspieszenie
dośrodkowe (normalne)
Przyspieszenie
kątowe (styczne)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 32
AB
A
Bω
+AB
=
aB=aA+ aBA=aA+ aBAn+ aBA
t
aBA=ω×(ω× AB )= − ω2AB
Metoda rozkładu przyspieszeń
Przykład
AB
ε+
Przyspieszenie
dośrodkowe (normalne)
Przyspieszenie
kątowe (styczne)
aBA=ε× AB
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 33
Plan przyspieszeń
Planem przyspieszeń członu sztywnego nazywamy miejsce
geometryczne końców wektorów przyspieszeń bezwzględnych
członu odłożonych z punktu zwanego biegunem planu
przyspieszeń.
Plan przyspieszeń członu jest do niego podobny pod względem
konfiguracji punktów i obrócony o kąt (180o-ψ) w kierunku:
- zgodnym ze zwrotem chwilowej prędkości kątowej członu,
jeżeli jednakowe są zwroty wektorów ω i ε,
- przeciwnym do zwrotu chwilowej prędkości kątowej członu,
jeżeli przeciwne są zwroty wektorów ω i ε.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 34
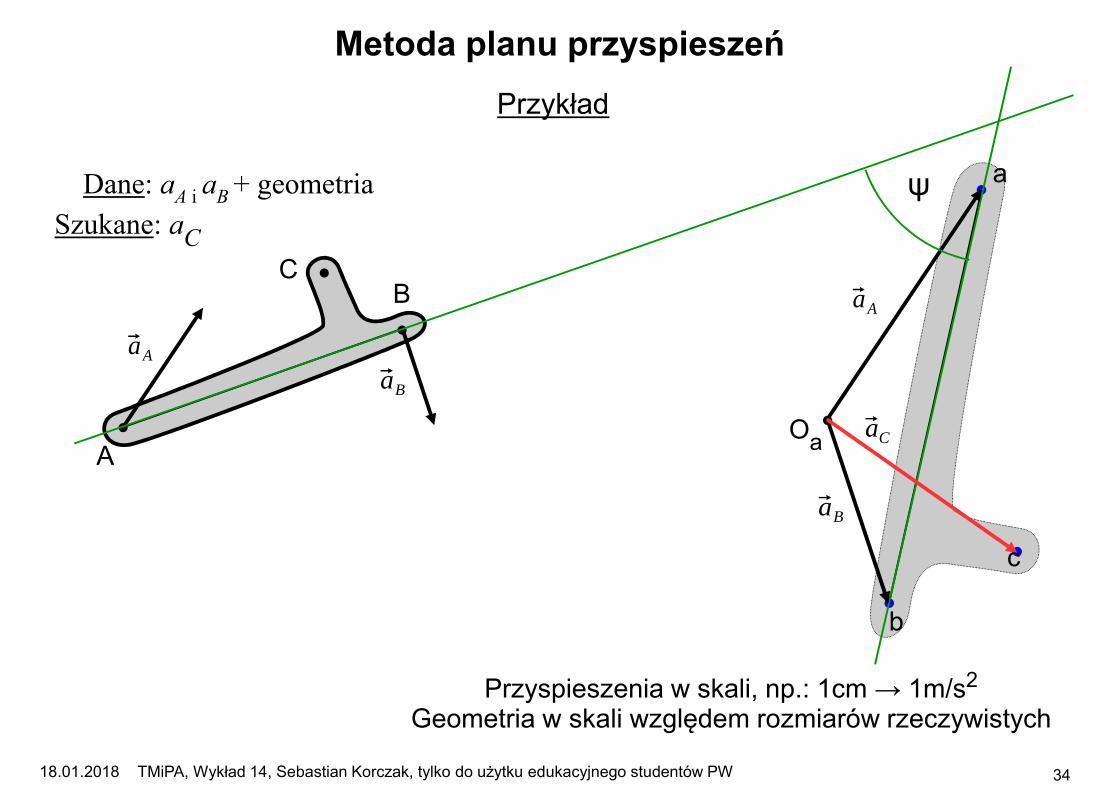
Metoda planu przyspieszeń
A
B
aA
aB
C
Oa
a
b
ψ
Przyspieszenia w skali, np.: 1cm → 1m/s2
Geometria w skali względem rozmiarów rzeczywistych
Przykład
Dane: aA i aB + geometria
Szukane: aC
c
aA
aB
aC

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 35
Przyspieszenia w ruchu złożonym
B1
B2
B
aB2=aB1u+ aB2 B1
w+ a
c
Bezwzględne
przyspieszenie
punktu B2
Przyspieszenie unoszenia
(bezwzględne przyspieszenie
punktu B1)
Przyspieszenie
względne
Przyspieszenie
Coriolisa
ac=2 ωu×v B2B1

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 36
Wykład 4
Analityczna metoda wyznaczania prędkości i przyspieszeń mechanizmów płaskich.
Mechanizmy krzywkowe.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 37
Procedura postępowania w metodzie analitycznejwyznaczania prędkości i przyspieszeń
punktów mechanizmów płaskich
1. Wprowadzić kartezjański układ współrzędnych Oxy.
2. Człony mechanizmu zastąpić układem wektorów, które mogą w czasie
ruchu mechanizmu zmieniać swoją długość, położenie i orientację.
3. Wprowadzone wektory muszą tworzyć zamknięte wieloboki, często
występując w obrębie grup strukturalnych mechanizmu.
4. Dla wszystkich wektorów wprowadzić jednakowo określone kąty ich
orientacji względem wybranej osi (tzw. kąty skierowane). Przyjmijmy, że
będą to kąty między dodatnią półosią osi x układu współrzędnych
a dodatnim kierunkiem wektora, mierzone z dodatnim znakiem przeciwnie
do ruchu wskazówek zegara.
5. Dla każdego z wieloboku wektorów zapisać wektorowe równanie ich
sumy, np.:
∑i=1
i=n
l i=0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 38
Procedura postępowania w metodzie analitycznejwyznaczania prędkości i przyspieszeń
punktów mechanizmów płaskich
6. Zrzutować równania wektorowe na osie układu współrzędnych, np.:
(przyjęcie jednakowej procedury wprowadzania kątów skierowanych
pozwala wykonać powyższe rzutowanie bez konieczności rozpatrywania
znaków)
Na tym etapie warto oznaczyć, które długości wektorów i kąty skierowania
są znane (są stałe bo wynikają z geometrii mechanizmu), a które
się zmieniają i są niewiadomymi funkcjami.
W prawidłowo postawionym zadaniu na koniec tego etapu liczba
niewiadomych powinna być równa liczbie równań rzutów.
7. Rozwiązać równania rzutów wyznaczając niewiadome funkcje.
Otrzymujemy na tym etapie funkcyjny opis ruchu mechanizmu.
x: ∑i=1
i=n
|l i|cosφ i=0 y: ∑i=1
i=n
|l i|sin φ i=0

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 39
Procedura postępowania w metodzie analitycznejwyznaczania prędkości i przyspieszeń
punktów mechanizmów płaskich
8. Zróżniczkować wyznaczone w pkt. 7 funkcje aby uzyskać prędkości
zmian długości wektorów i ich prędkości kątowe.
Dokonać kolejnego różniczkowania w celu uzyskania przyspieszeń zmian
długości wektorów i przyspieszeń kątowych.
9. Jeśli w pkt. 8 nie uzyskano pożądanych informacji należy zróżniczkować
równania rzutów z pkt. 6. i wyznaczyć prędkości. Po kolejnym
różniczkowaniu można wyznaczyć przyspieszenia. Bardzo pomocnicze
może okazać się na tym etapie obrócenie układu współrzędnych o pewien
kąt, co upraszcza niektóre składniki w równaniach rzutów.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 40
Mechanizmy krzywkowe
Podstawowe informacje
Mechanizm krzywkowy – mechanizm składający się z krzywki i popychacza
tworzących parę kinematyczną wyższą klasy IV.
Krzywka porusza się najczęściej ruchem obrotowym (czasem postępowym,
a popychacz ruchem postępowo zwrotnym (czasem wahadłowym).
zalety
prosta konstrukcja,
łatwość wykonania,
dowolne wymiary,
łatwość uzyskania
skomplikowanych
przebiegów.
wady
niska wytrzymałość przy
dużych obciążeniach,
brak adaptacyjności

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 41
Mechanizmy krzywkowe
Podział mechanizmów krzywkowych:
płaskie / przestrzenne
z popychaczem centralnym / z popychaczem mimośrodowym
z zamknięciem kinematycznym / z zamknięciem siłowym
Podstawowe informacje

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 42
Analiza i synteza mechanizmów krzywkowych
Analiza mechanizmu krzywkowego – wyznaczenie przebieguprzemieszczenia, prędkości i przyspieszenia popychacza w funkcjikąta obrotu krzywki dla zadanej konstrukcji i geometrii mechanizmu.
Synteza mechanizmu krzywkowego – zaprojektowanie geometriikrzywki dla danej konstrukcji mechanizmu krzywkowego w celuuzyskania pożądanego przebiegu przemieszczenia, prędkości lubprzyspieszenia popychacza w funkcji kąta obrotu krzywki. Dodatkowonarzuca się pewne ograniczenia, np. maksymalny wznios popychacza,maksymalną prędkość lub przyspieszenie. Należy sprawdzić równieżtrzecią pochodną wzniosu popychacza (udar), która powinna miećskończone wartości.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 43
Wykład 5
Mechanizmy krzywkowe cd.Dynamika mechanizmów płaskich.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 44
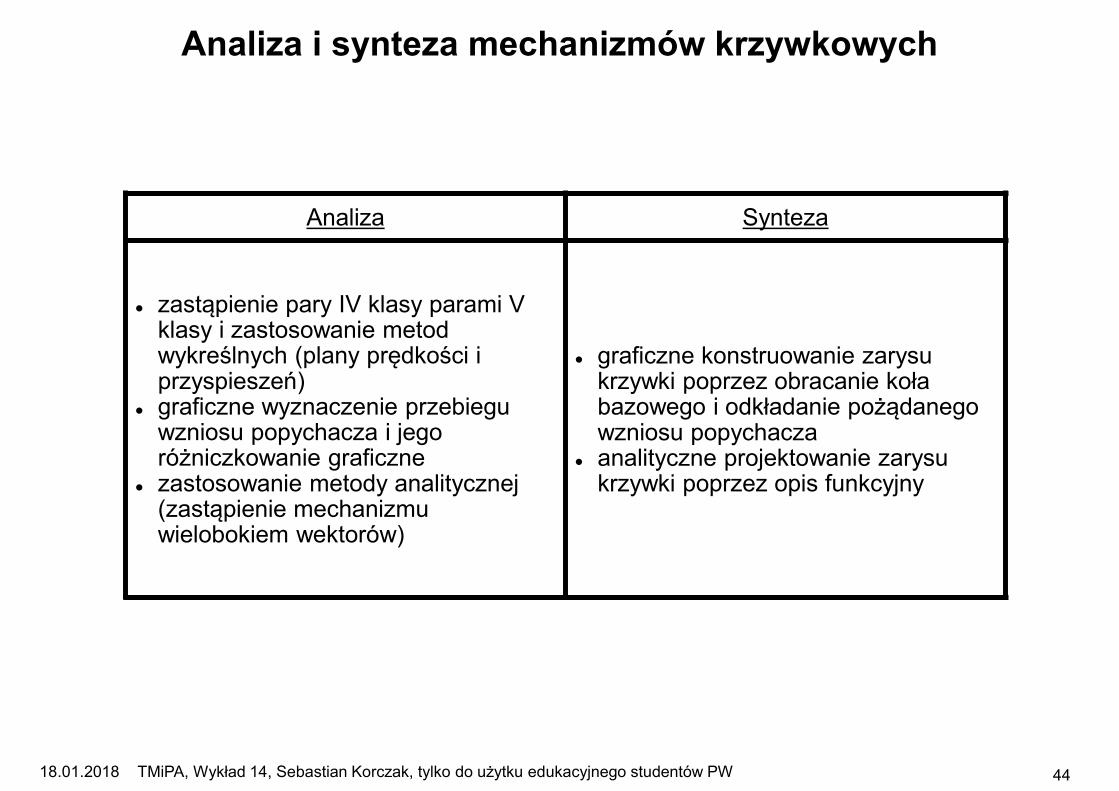
Analiza i synteza mechanizmów krzywkowych
Analiza Synteza
zastąpienie pary IV klasy parami V klasy i zastosowanie metod wykreślnych (plany prędkości i przyspieszeń)
graficzne wyznaczenie przebiegu wzniosu popychacza i jego różniczkowanie graficzne
zastosowanie metody analitycznej (zastąpienie mechanizmu wielobokiem wektorów)
graficzne konstruowanie zarysu krzywki poprzez obracanie koła bazowego i odkładanie pożądanego wzniosu popychacza
analityczne projektowanie zarysu krzywki poprzez opis funkcyjny
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 45
Metoda analityczna
Synteza mechanizmów krzywkowych
Dla danego przebiegu przyspieszenia lub prędkości wzniosu popychacza wfunkcji czasu (lub kąta obrotu) charakterystykę wzniosu popychaczaotrzymuje się poprzez całkowanie.
Przebieg wzniosu popychacza w funkcji kąta obrotu krzywki możemy wprostwykorzystać do wygenerowania zarysu krzywki (lub po przekształceniu dowspółrzędnych biegunowych).
Zastosowanie popychacza ostrzowego pozwala dokładnie odzwierciedlićzadaną funkcję wzniosu popychacza.
Zastosowanie popychacza rolkowego wprowadza ograniczenie maksymalnejprędkości wzniosu popychacza – wymaga ustalenia proporcji międzywielkością krzywki a promieniem rolki.
Często projektuje się krzywki o symetrycznym zarysie oraz gładkie(bez uskoków).
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 46
Dynamika mechanizmów
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 47
Przegląd zagadnień
Dynamika mechanizmów
Opis mechanizmu płaskiego za pomocą brył sztywnych i punktów materialnych.
Wykreślne wyznaczanie sił i momentów sił bezwładności.
Reakcje w parach kinematycznych.
Siły napędzające i robocze.
Pierwsze i drugie zadanie dynamiki mechanizmów.
Zastosowanie metod wykreślnych, analityczno-wykreślnych i analitycznych.
Tarcie w parach kinematycznych.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 48
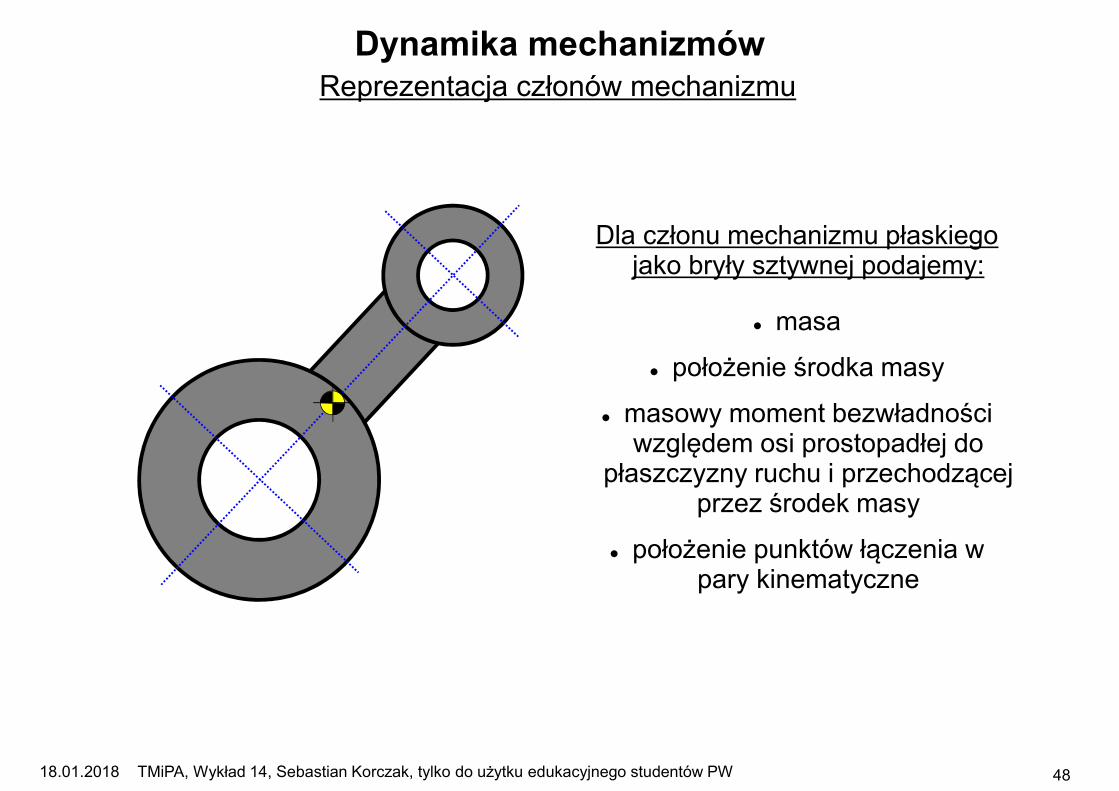
Reprezentacja członów mechanizmu
Dynamika mechanizmów
Dla członu mechanizmu płaskiego jako bryły sztywnej podajemy:
masa
położenie środka masy
masowy moment bezwładności względem osi prostopadłej do
płaszczyzny ruchu i przechodzącej przez środek masy
położenie punktów łączenia w pary kinematyczne
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 49
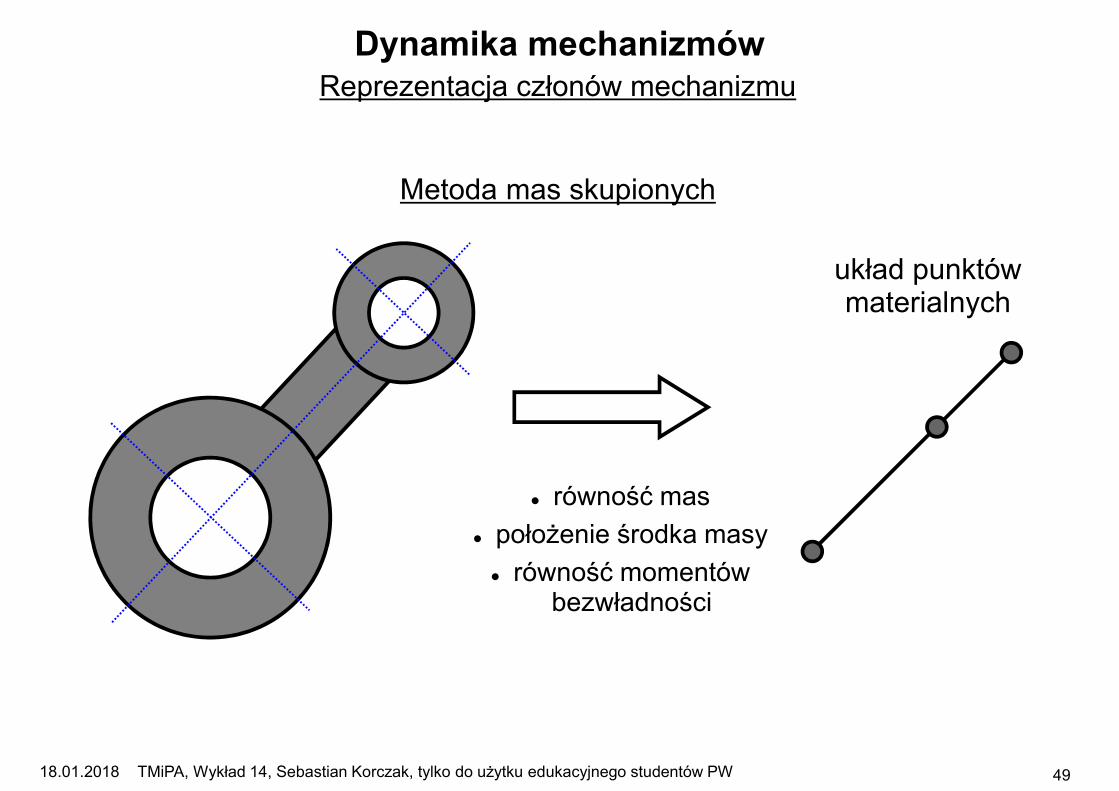
Reprezentacja członów mechanizmu
Dynamika mechanizmów
Metoda mas skupionych
równość mas
położenie środka masy
równość momentów bezwładności
układ punktów materialnych

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 50
Siły i momenty sił bezwładności
Dynamika mechanizmów
C aC
εsiła bezwładności
BC= − maC
Moment od siłbezwładności
MC= − IC ε
MC
BC

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 51
Pierwsze zadanie dynamiki
Dynamika mechanizmów
Wyznaczenie sił i momentów sił działających na mechanizm wywołującychzadany ruch mechanizmu – KINETOSTATYKA MECHANIZMÓW.
0. Zaprojektowanie mechanizmu do wykonywania konkretnego zadania.Ustalenie napędu i sprawdzenie zgodności z założeniami przebieguprzemieszczeń, prędkości i przyspieszeń.
1. W oparciu o wyznaczone przyspieszenia wyznaczyć siły bezwładnościdziałające na człony ruchome mechanizmu w wybranym położeniumechanizmu.
2.Dokonać rozkładu mechanizmu na podukłady ujawniając reakcje wpołączeniach.
3. Zapisać równania d'Alemberta dla podukładów mechanizmu (dla ruchupostępowego i obrotowego).
4. Rozwiązać powstałe równania metodą graficzną, analityczną lub mieszaną.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 52
Wykład 6
Dynamika maszyn.Redukcja mas i sił.
Równanie ruchu maszyny.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 53
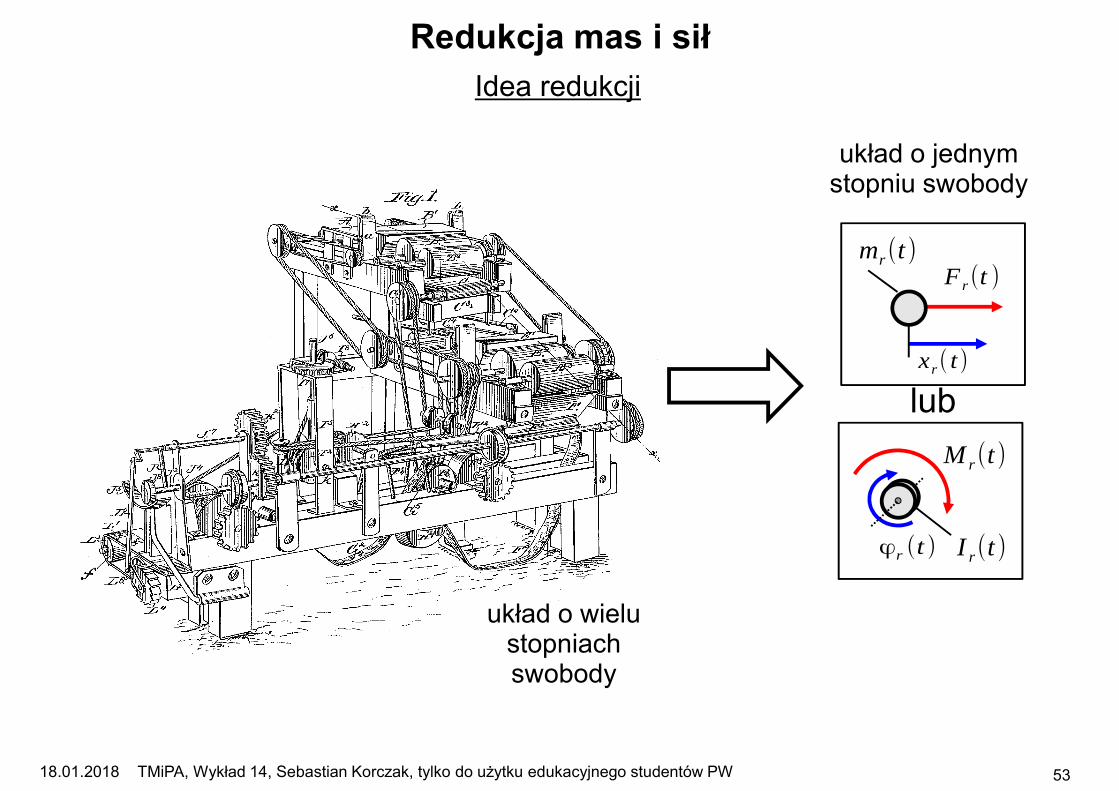
Idea redukcji
Redukcja mas i sił
układ o wielu stopniach swobody
lub
mr(t)Fr(t )
xr( t)
I r(t)
Mr(t)
φ r (t)
układ o jednym stopniu swobody

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 54
Energia kinetyczna
Redukcja mas
mr(t)Fr(t )
xr( t)
I r(t)
Mr(t)
φ r (t)Ek =1
2I r ωr
2
zredukowany moment
bezwładności
Ek =1
2mr vr
2
masa zredukowana
lub
vr=dxr (t )
dt
ωr=d φ r (t)
dt
Całkowita energia kinetyczna układu
Ek (mi , I i , vi ,ωi)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 55
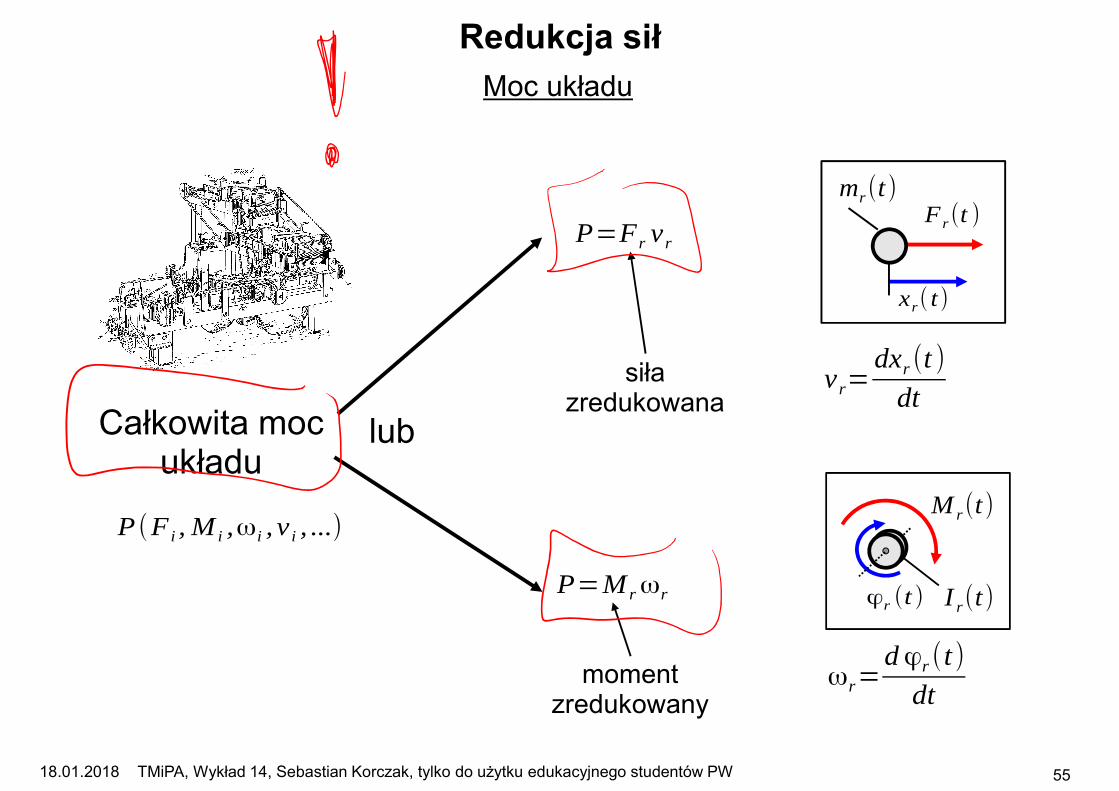
Moc układu
Redukcja sił
Całkowita moc układu
P=Mrωr
moment zredukowany
P (Fi , Mi ,ωi , vi , ...)
P=Fr vr
siła zredukowana
lub
mr(t)Fr(t )
xr( t)
I r(t)
Mr(t)
φ r (t)
vr=dxr (t )
dt
ωr=d φ r (t)
dt

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 56
Redukcja sił i momentów sił
Pr=∑i=1
n
Pi
vi
vr
cosαi+∑j=1
k
M j
ω j
vr
Mr= ∑i=1
n
Pi
vi
ωrcosαi+ ∑
j=1
k
M j
ω j
ωr
Redukcja mas i momentów bezwładności
mr= ∑i=1
n
mi
vi
2
vr2+ ∑
j=1
k
I j
ω j
2
vr2 I r= ∑
i=1
n
mi
vi
2
ωr2+ ∑
j=1
k
I j
ω j
2
ωr2
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 57
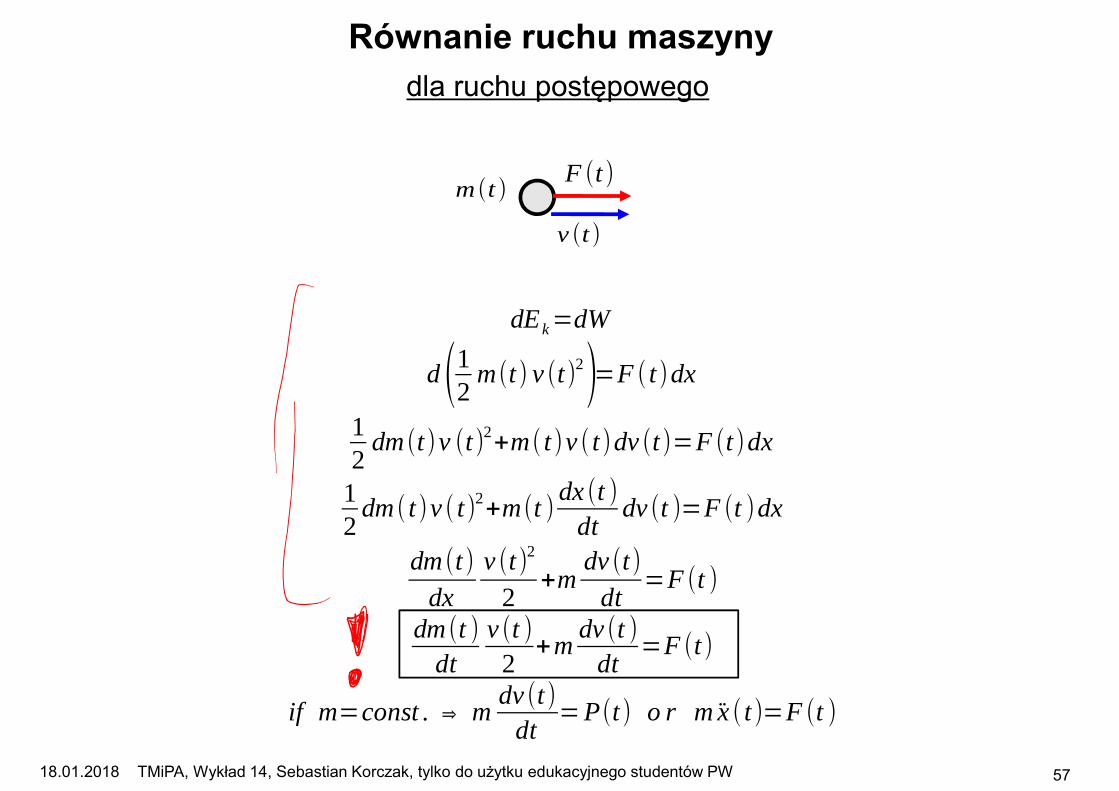
dla ruchu postępowego
Równanie ruchu maszyny
dEk=dW
d(1
2m(t) v (t)2)=F ( t)dx
1
2dm (t)v (t)2+m( t)v ( t)dv (t)=F (t)dx
1
2dm ( t)v ( t)2+m(t )
dx (t )
dtdv (t )=F (t )dx
dm (t)
dx
v (t)2
2+m
dv (t)
dt=F (t )
dm (t )
dt
v (t )
2+m
dv (t )
dt=F (t)
if m=const . ⇒ mdv (t)
dt=P(t) o r m x ( t)=F (t )
m(t)F (t)
v (t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 58
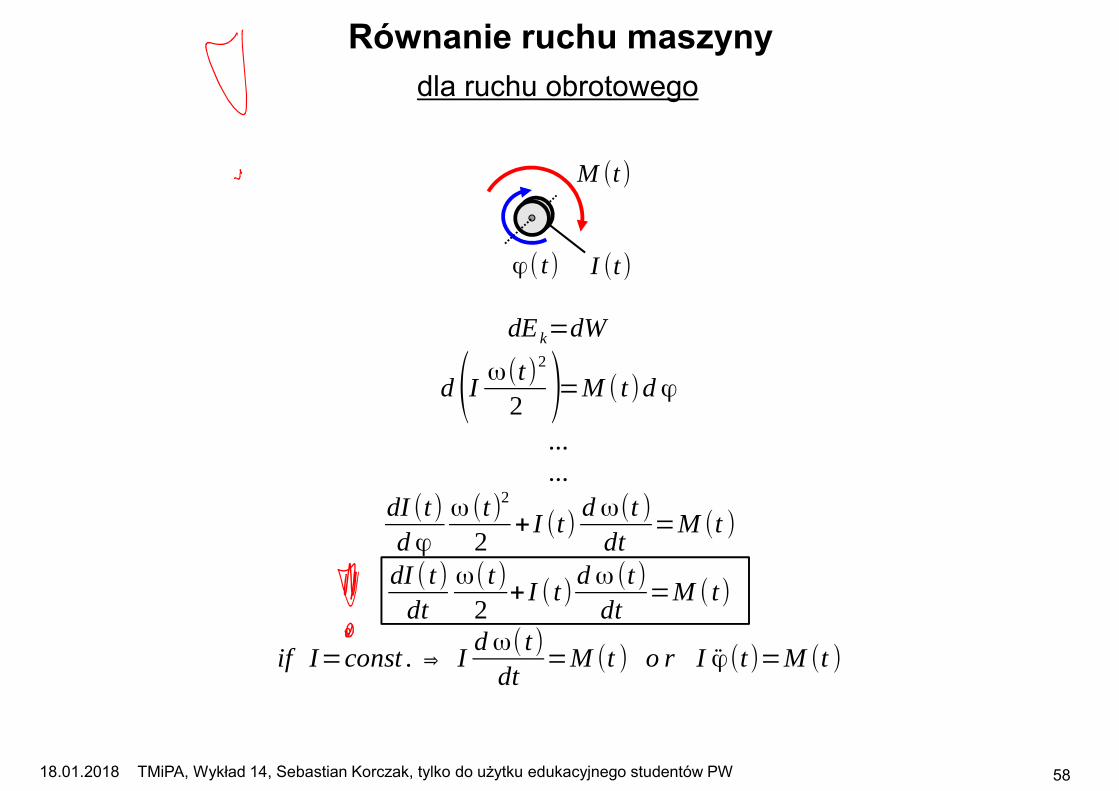
dla ruchu obrotowego
Równanie ruchu maszyny
dEk=dW
d(I ω(t)2
2 )=M ( t)d φ
...
...
dI (t)
d φ
ω(t)2
2+ I (t)
dω(t )
dt=M (t )
dI ( t)
dt
ω( t)
2+ I ( t)
dω(t)
dt=M ( t)
if I=const . ⇒ Idω( t )
dt=M (t ) o r I φ (t)=M (t )
I (t)
M (t)
φ ( t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 59
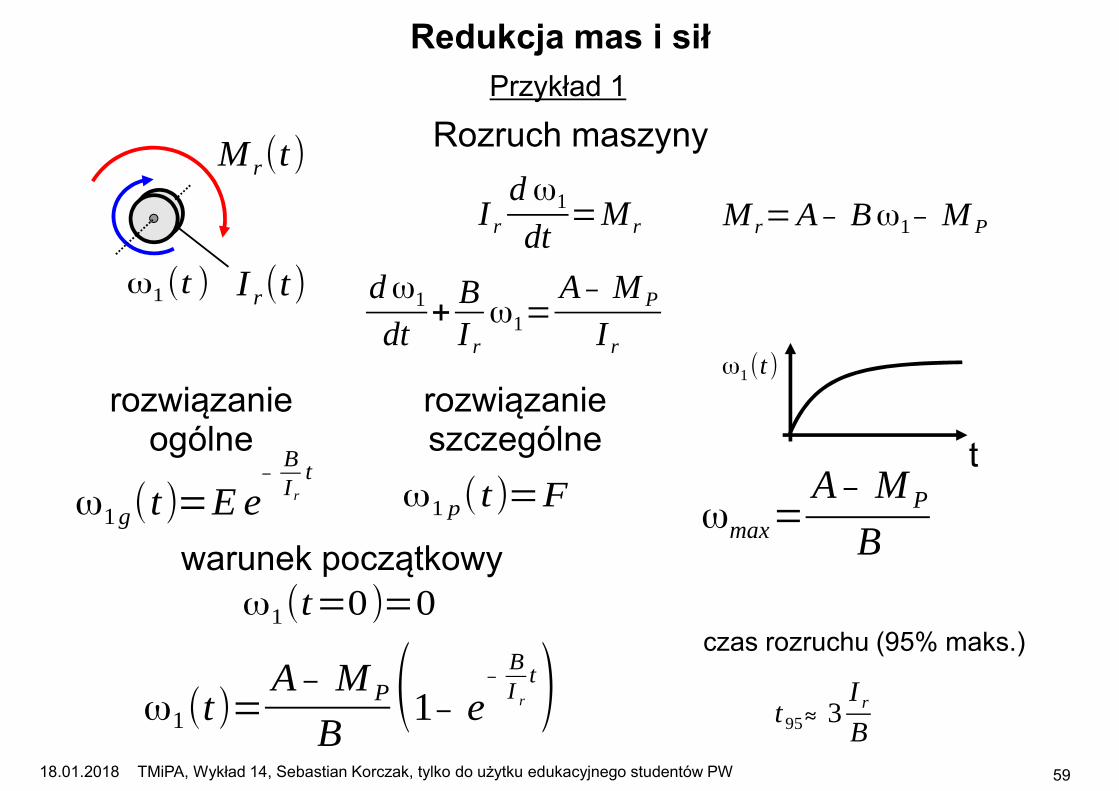
Redukcja mas i sił
Przykład 1
I r
dω1
dt=Mr
I r(t)
Mr(t)
ω1(t )
Mr=A − Bω1 − MP
Rozruch maszyny
dω1
dt+
BIr
ω1=A − MP
Ir
rozwiązanie ogólne
rozwiązanie szczególne
ω1g(t)=E e −
BIr
tω1 p(t)=F
ω1(t)=A − MP
B(1 − e
−B
I r
t)
warunek początkowy
ω1(t=0)=0
t
ω1(t)
ωmax=A − MP
B
czas rozruchu (95% maks.)
t 95 ≈ 3I r
B
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 60
Wykład 7
Nierównomierność ruchu maszyny.Wstęp do automatyki.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 61
silnik maszyna
φ ( t) I R
φ ( t)
t
ωmax
ωmin
Ek .max=1
2I Rωmax
2Ek .min=
1
2I Rωmin
2
Δ L=Ek .max − Ek . min=δ I Rωśr
2
δ=ωmax− ωmin
ωśr
ωśr=ωmax+ωmin
2
Nierównomierność biegu maszyny
Nierównomierność biegu maszynyw ruchu ustalonym
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 62
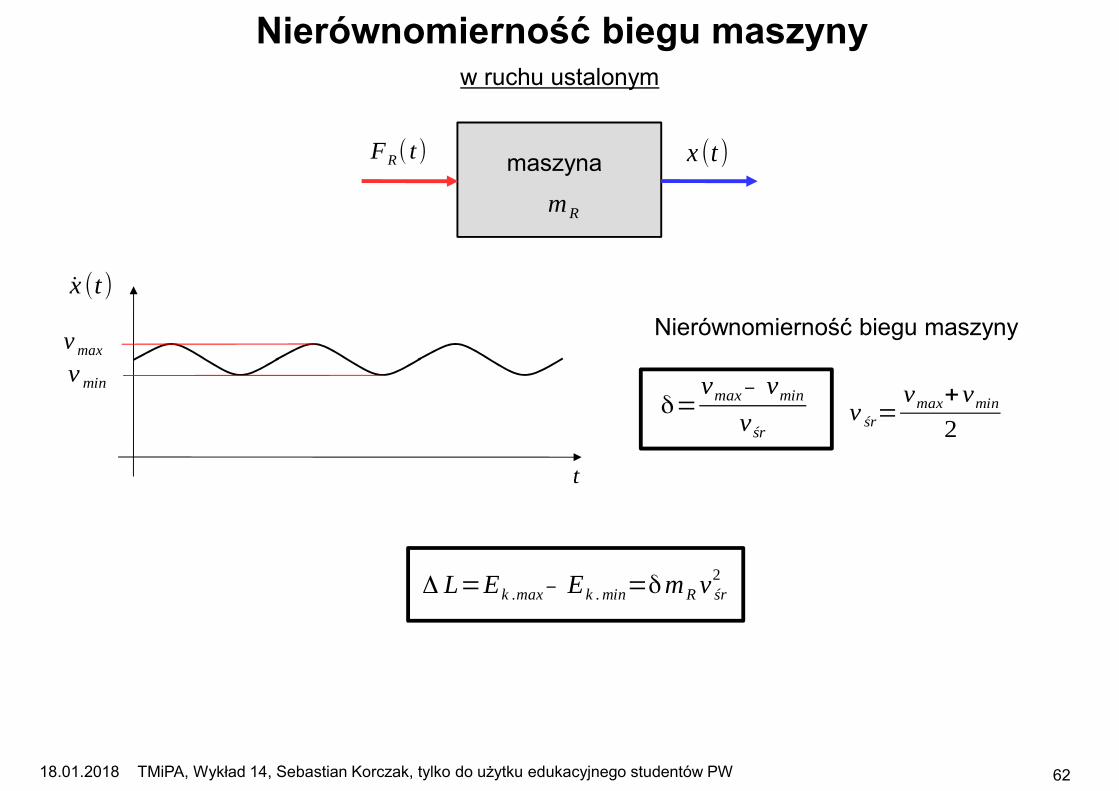
x (t)
t
vmax
v min
Δ L=Ek .max − Ek . min=δmRv śr
2
δ=vmax − vmin
vśrv śr=
vmax+vmin
2
Nierównomierność biegu maszyny
Nierównomierność biegu maszynyw ruchu ustalonym
maszyna
mR
FR( t) x (t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 63
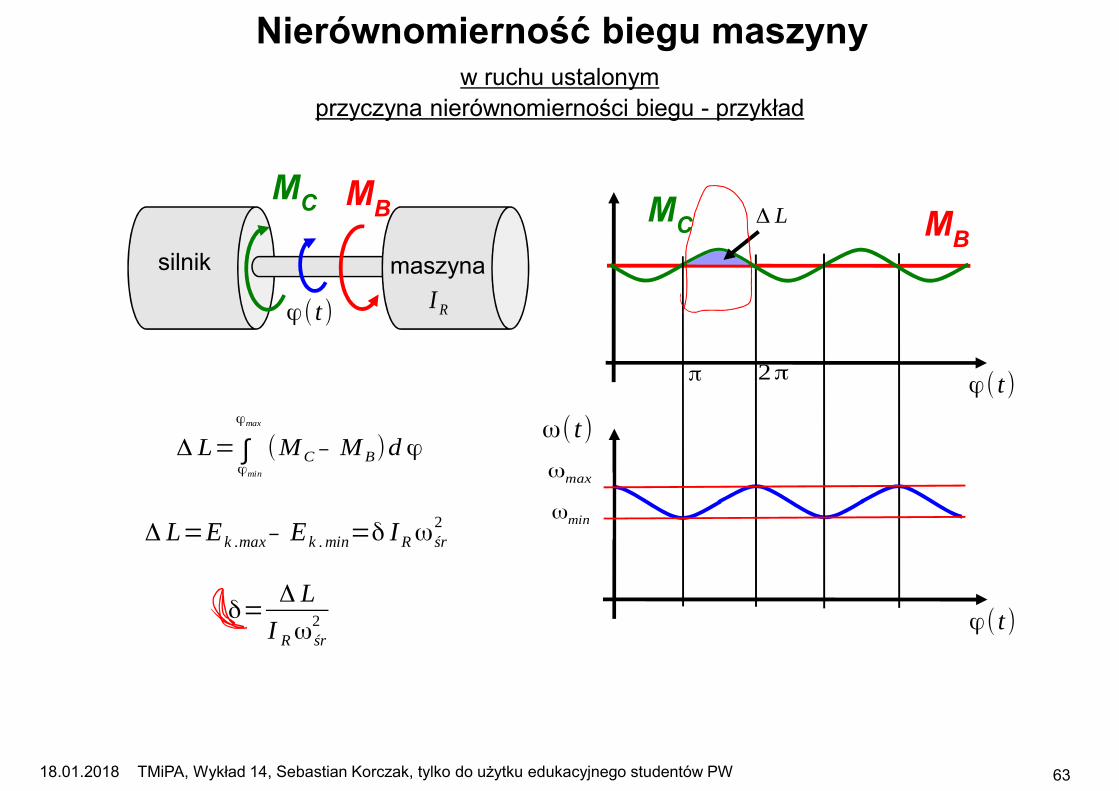
ω( t)
φ ( t)
silnik maszyna
φ ( t) I R
MC MB
φ ( t)
MC MB
π 2π
Δ L
Δ L=∫φmin
φmax
(MC− MB)d φ
δ=Δ L
I Rωśr
2
Nierównomierność biegu maszynyw ruchu ustalonym
przyczyna nierównomierności biegu - przykład
ωmax
ωmin
Δ L=Ek .max − Ek . min=δ I Rωśr
2

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 64
silnik maszyna
φ ( t) I RIKZ
I KZ=(δ1
δ2
− 1)I R
Δ L=δ1 I Rωśr2
założenie
I R≈ const .
Koło zamachowe
silnik maszyna
φ ( t) I R
φ ( t)
t
ωmax
ωmin
w ruchu ustalonym
φ ( t)
t
ωmax
ωmin
Δ L=δ2(I R+ I FW )ωśr2
δ1 I Rωśr2 =δ2(I R+ I KZ)ωśr
2
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 65
Podstawy automatyki

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 66
Podstawy automatyki
Automatyka – dyscyplina naukowa (z dziedziny nauk technicznych, wymieniana razem z robotyką) zajmująca się zagadnieniami sterowania procesami bez stałego nadzoru człowieka
automatyka ≠ automatyzacja
Teoria sterowania – gałąź matematyki i cybernetyki zajmująca się analizą i modelowaniem matematycznymukładów i procesów traktowanych jako układy dynamiczne ze sprzężeniem zwrotnym.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 67
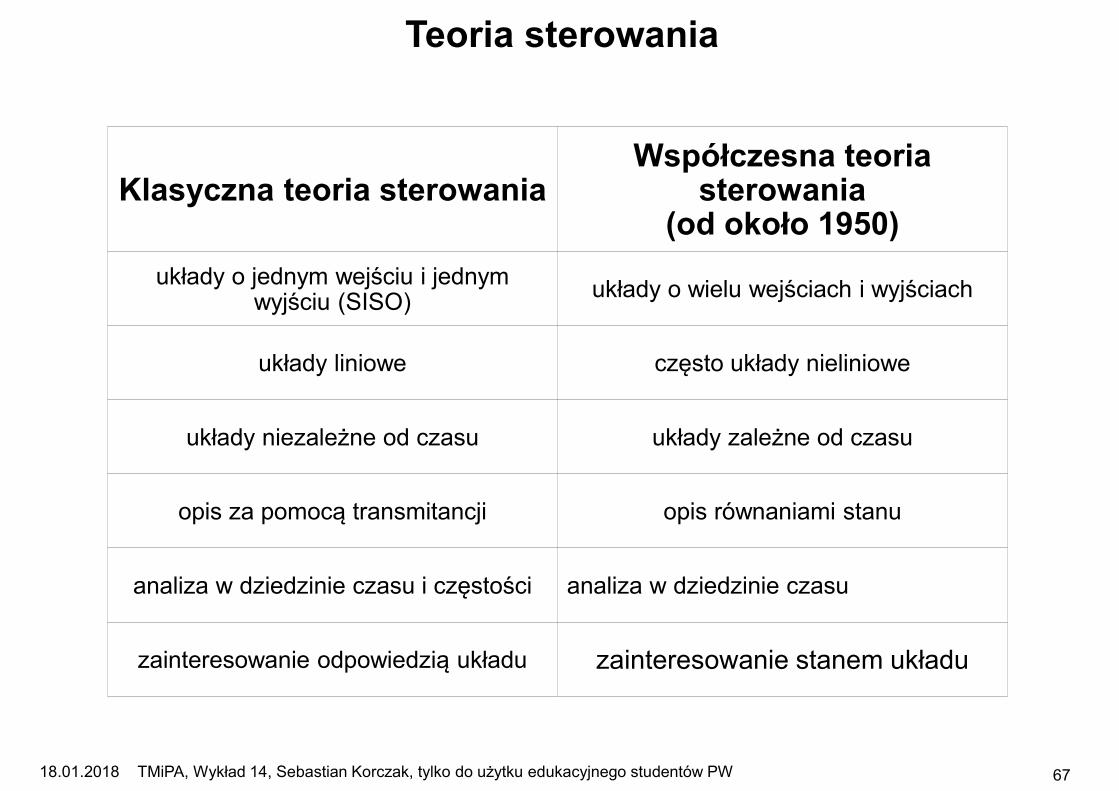
Teoria sterowania
Klasyczna teoria sterowaniaWspółczesna teoria
sterowania(od około 1950)
układy o jednym wejściu i jednym wyjściu (SISO)
układy o wielu wejściach i wyjściach
układy liniowe często układy nieliniowe
układy niezależne od czasu układy zależne od czasu
opis za pomocą transmitancji opis równaniami stanu
analiza w dziedzinie czasu i częstości analiza w dziedzinie czasu
zainteresowanie odpowiedzią układu zainteresowanie stanem układu
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 68
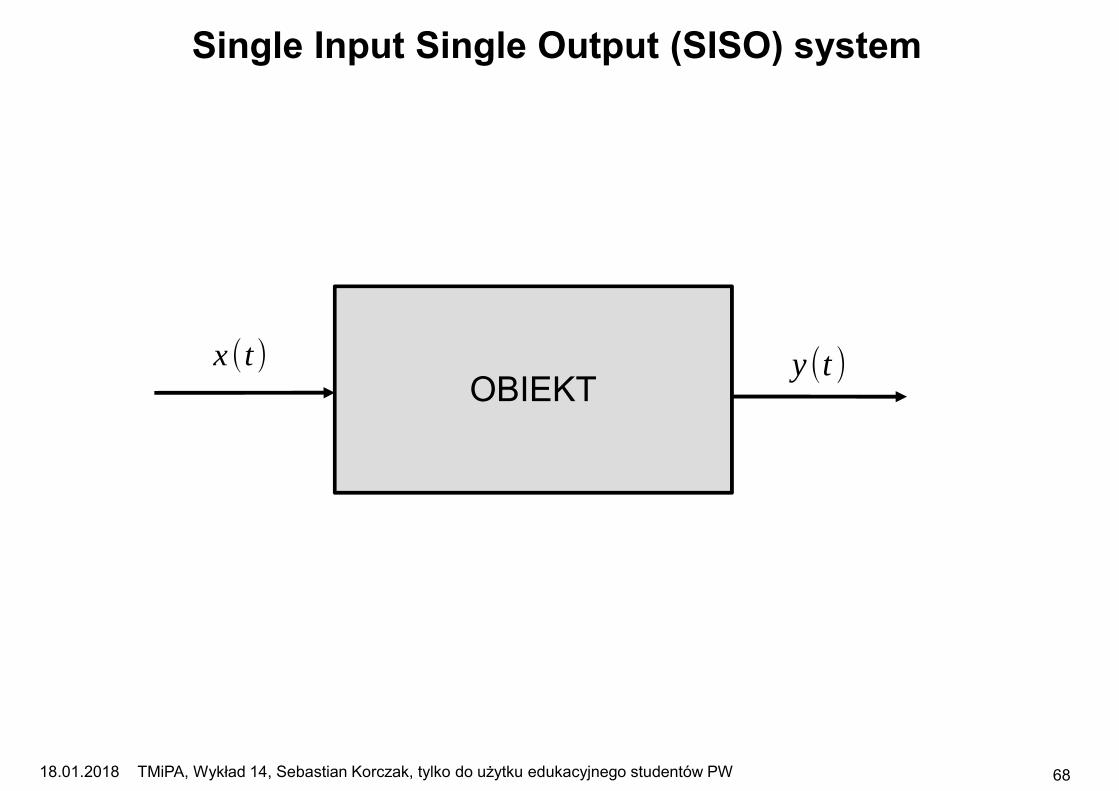
Single Input Single Output (SISO) system
OBIEKTx (t) y (t )

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 69
Układy liniowe niezależne od czasu(Linear time-invariant LTI)
Układ liniowy
x (t ) - wejście, y (t)=h(x (t )) - wyjście
h(α x (t ))=αh(x (t ))=α y (t ) skalowanie
h(x1(t)+x2(t))=h(x1(t))+h(x2(t )) superpozycja
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 70
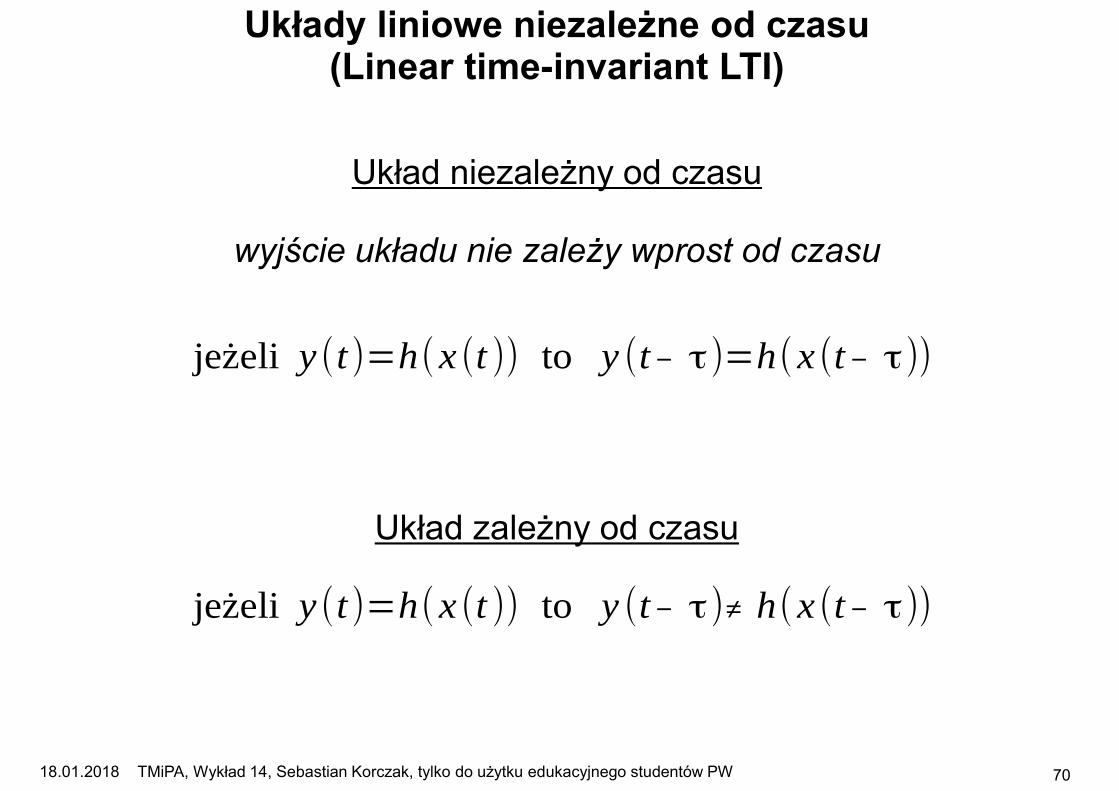
Układy liniowe niezależne od czasu(Linear time-invariant LTI)
Układ niezależny od czasu
wyjście układu nie zależy wprost od czasu
jeżeli y (t)=h(x (t )) to y (t − τ)=h(x (t − τ))
Układ zależny od czasu
jeżeli y (t)=h(x (t )) to y (t − τ) ≠ h(x (t − τ))

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 71
Sterowanie w otwartej pętli
OBIEKTu(t)=x (t ) y (t )
KONTROLERyd(t )
pożądane wyjście obiektu
sygnał sterujący
wyjście obiektu
wejście obiektu
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 72
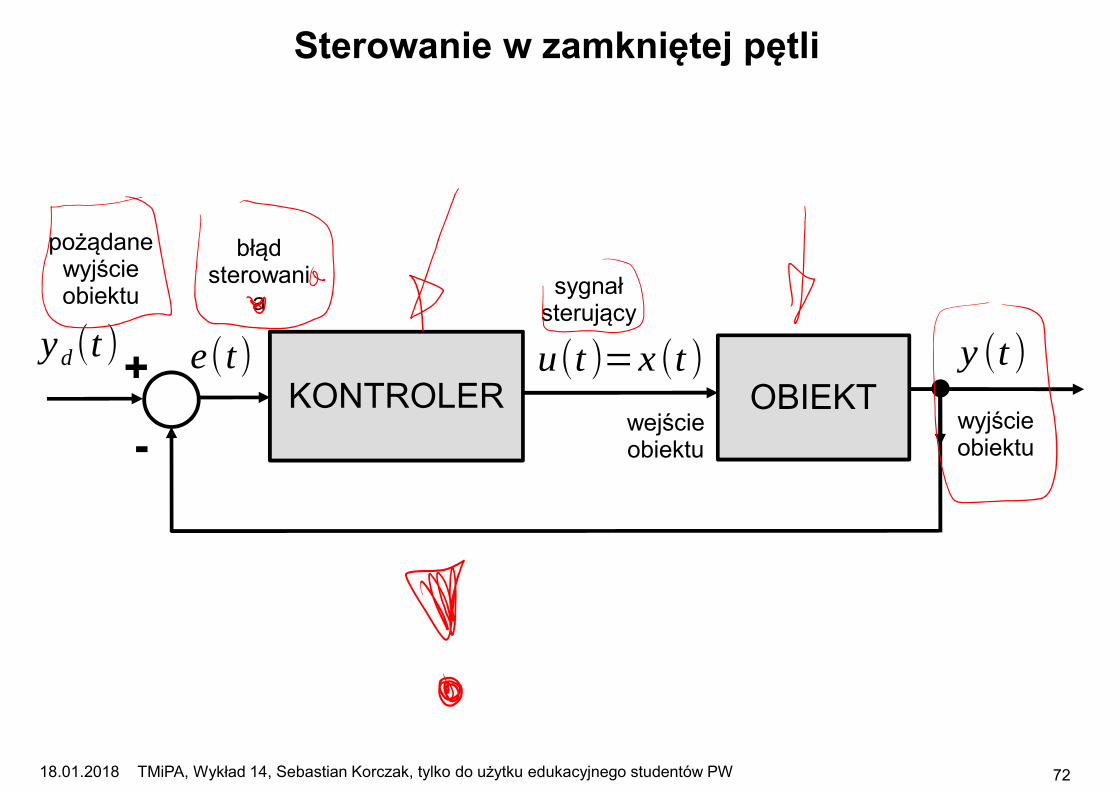
Sterowanie w zamkniętej pętli
OBIEKTu(t )=x (t ) y (t )
KONTROLER
yd(t )
pożądane wyjście obiektu sygnał
sterujący
wyjście obiektu
wejście obiektu
+
-
e(t)
błąd sterowani
a

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 73
Wykład 8
Transformata Laplace'a.Transmitancja.
Wyznaczanie odpowiedzi.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 74
Transformata Laplace'a
Założenie: x (t ) - sygnał taki, że dla t<0 x (t)=0
X (s)=L{x (t )}= ∫0
∞
x (t)e − st
dt
gdzie: s ∈ ℂ , s=σ+ jω , j= √ − 1
Warunkiem koniecznym istnienia całki jest lokalna całkowalność x(t) dla t <0, ∞).
Transformata Laplace'a funkcji x(t):
Odwrotnatransformata Laplace'a x(t): x (t )=L − 1{X (s)}=
12π j
limω → ∞
∫γ − jω
γ+ jω
X (s)est ds

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 75
skok jednostkowy
δ(t) impuls jednostkowy
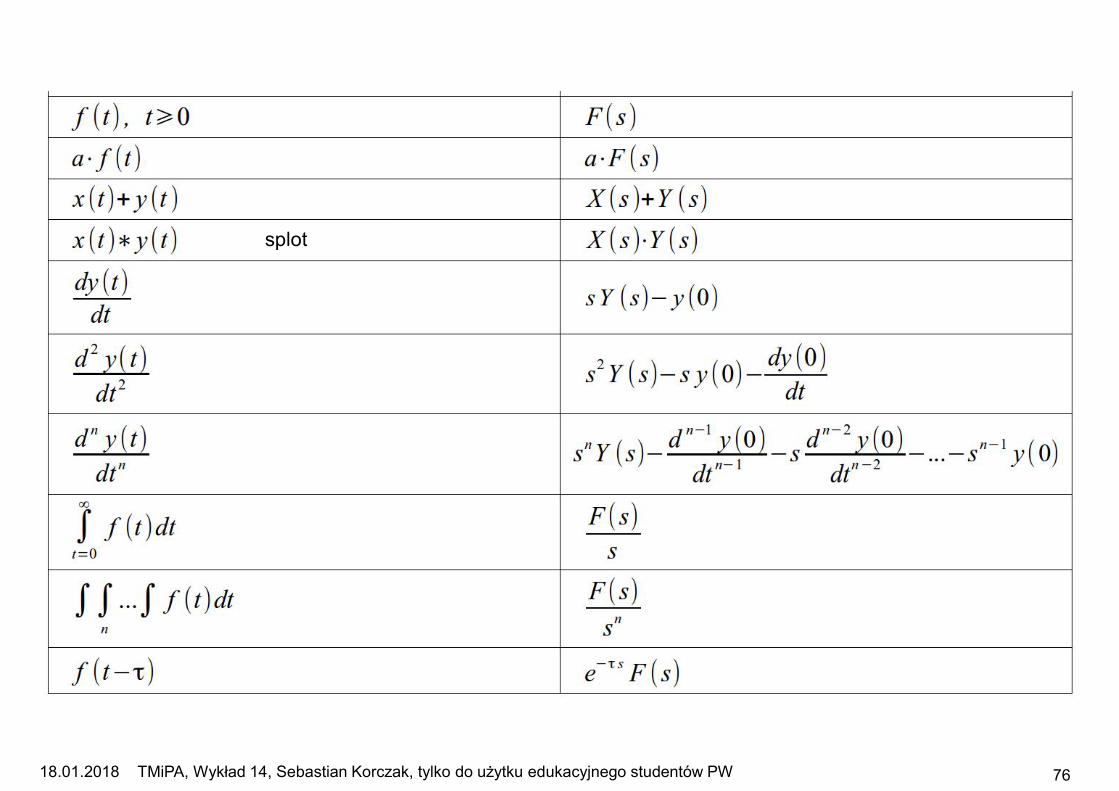
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 76
splot
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 77
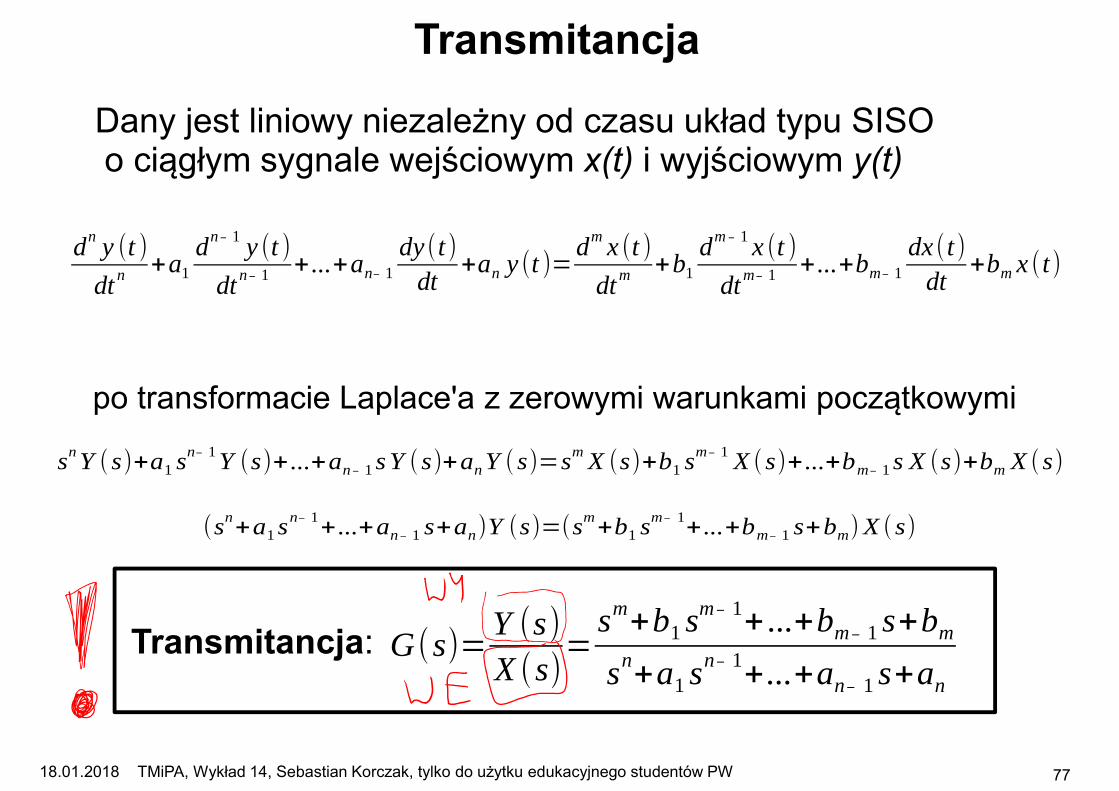
Transmitancja
dny (t )
dtn +a1
dn − 1
y (t )
dtn − 1 +...+an − 1
dy(t )
dt+an y (t )=
dmx (t )
dtm +b1
dm − 1
x (t )
dtm − 1 +...+bm − 1
dx(t)
dt+bm x (t)
Dany jest liniowy niezależny od czasu układ typu SISOo ciągłym sygnale wejściowym x(t) i wyjściowym y(t)
po transformacie Laplace'a z zerowymi warunkami początkowymi
snY (s)+a1 s
n − 1Y (s)+...+an − 1sY (s)+anY (s)=s
mX (s)+b1 s
m − 1X (s)+...+bm − 1s X (s)+bm X (s)
(sn+a1s
n − 1+...+an − 1 s+an)Y (s)=(s
m+b1 s
m − 1+...+bm − 1 s+bm)X (s)
G(s)=Y (s)
X (s)=
sm+b1 sm− 1+ ...+bm− 1 s+bm
sn+a1 s
n− 1+...+an− 1 s+an
Transmitancja:

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 78
Transmitancja
G(s)=Y (s)
X (s)=
sm+b1 sm− 1+ ...+bm− 1 s+bm
sn+a1 s
n− 1+...+an− 1 s+an
G(s)=Y (s)
X (s)=
(s − z1)(s − z2)...(s − zm)
(s − p1)(s − p2)...(s − pn)
z1, z2 , ... , zm - zera transmitancji
p1, p2 , ... , pn - bieguny transmitancji
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 79
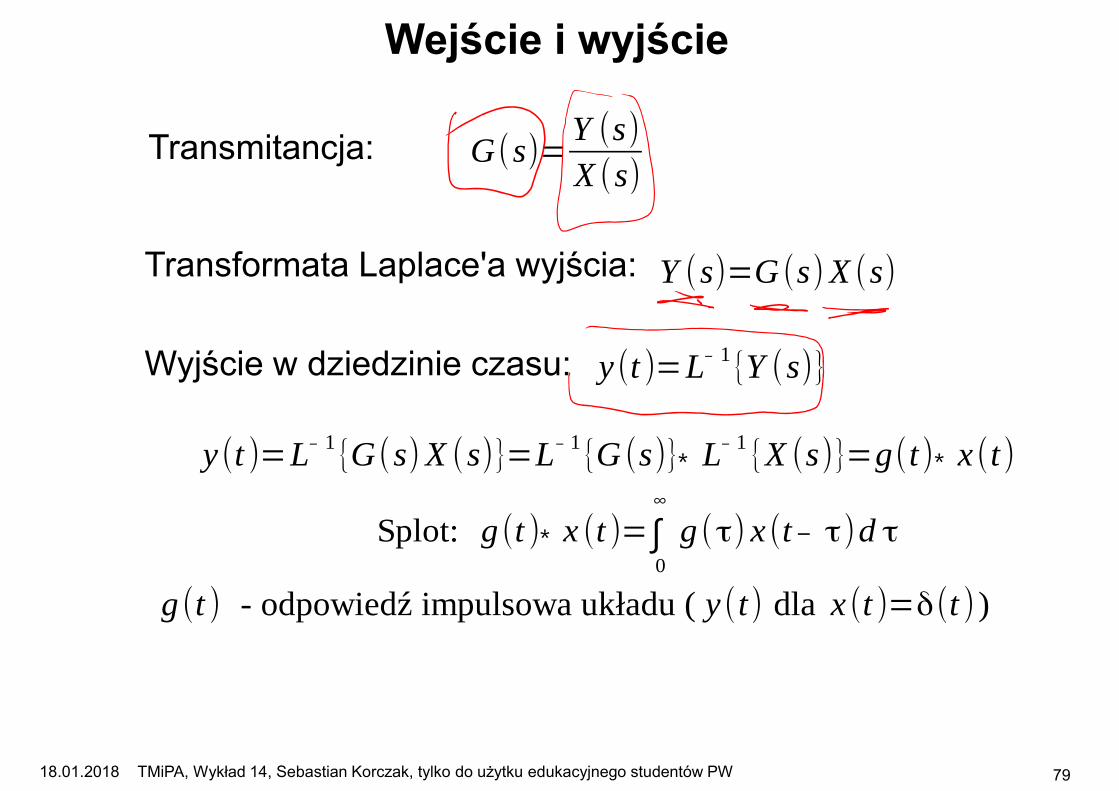
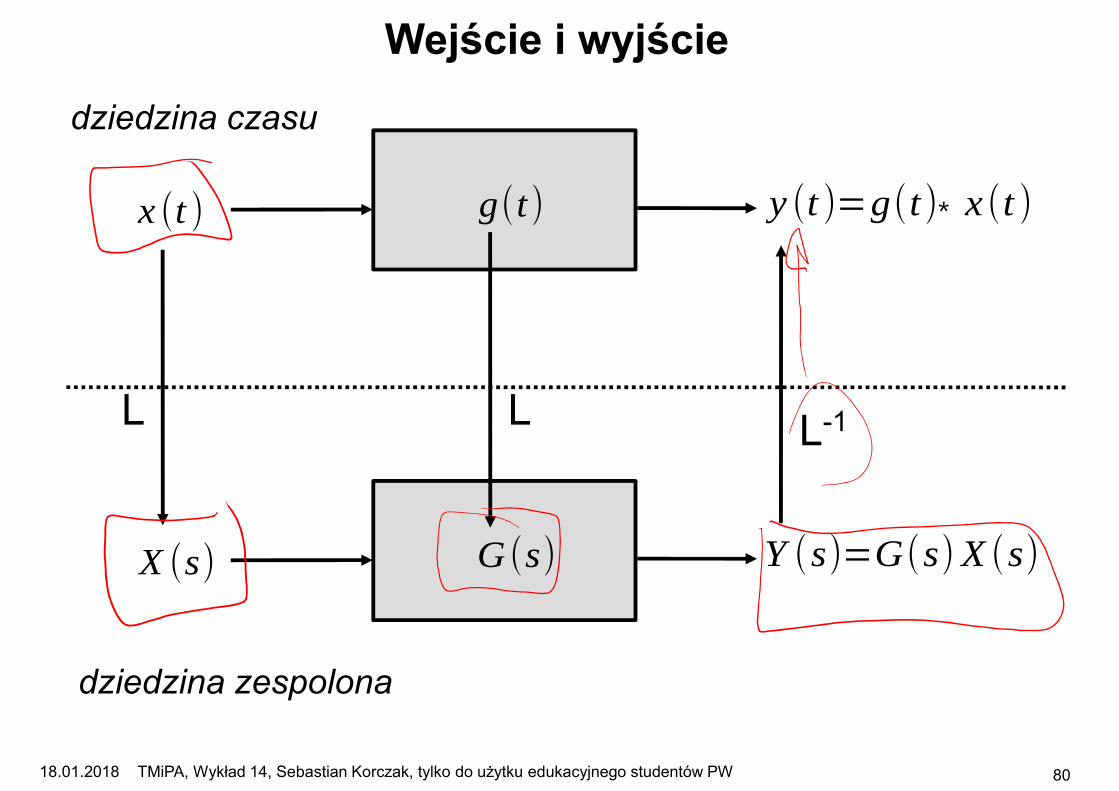
Wejście i wyjście
Transmitancja:
Transformata Laplace'a wyjścia:
Wyjście w dziedzinie czasu: y(t )=L − 1{Y (s)}
y (t )=L − 1{G(s)X (s)}=L − 1{G (s)}∗ L − 1 {X (s)}=g(t)∗ x (t)
Splot: g (t ) ∗ x (t )= ∫0
∞
g ( τ) x (t − τ)d τ
g (t ) - odpowiedź impulsowa układu ( y(t) dla x (t )=δ(t ))
G(s)=Y (s)
X (s)
Y (s)=G (s)X (s)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 80
Wejście i wyjście
x (t )
X (s) Y (s)=G(s)X (s)G (s)
dziedzina czasu
dziedzina zespolona
L L L-1
y (t )=g(t) ∗ x (t )g(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 81
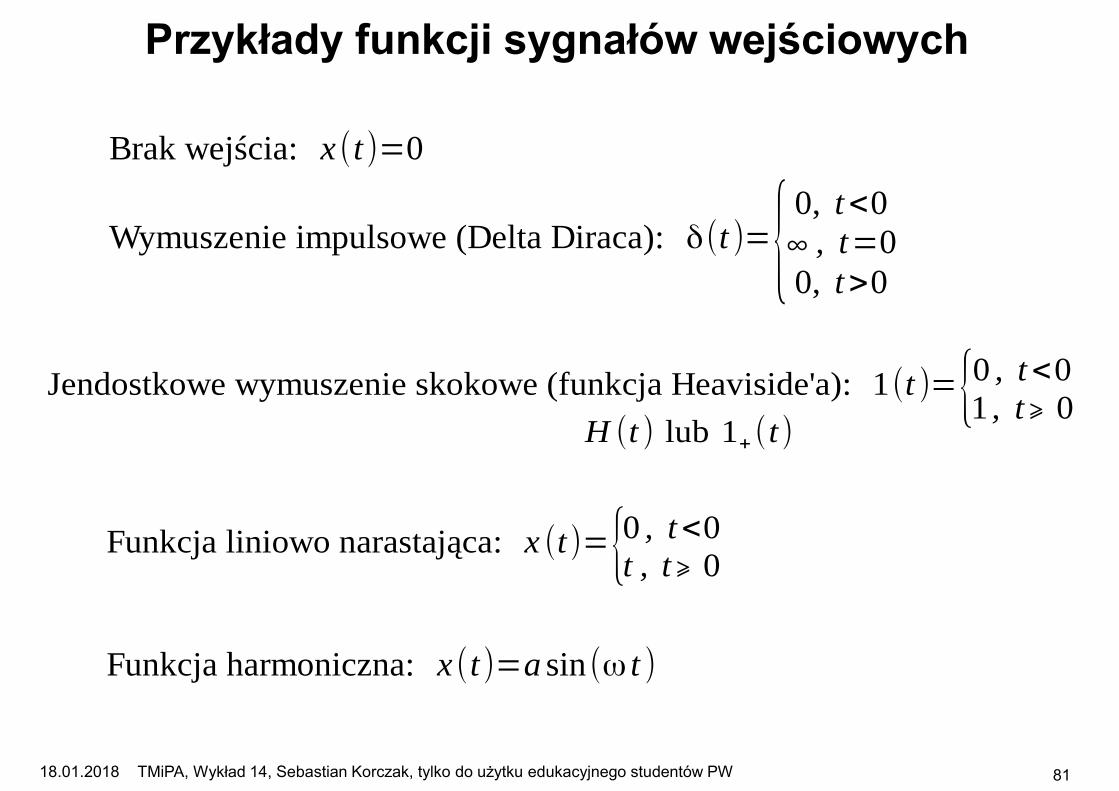
Przykłady funkcji sygnałów wejściowych
Brak wejścia: x (t)=0
Jendostkowe wymuszenie skokowe (funkcja Heaviside'a): 1(t )={0 , t<01 , t ⩾ 0
H (t ) lub 1+ (t)
Funkcja liniowo narastająca: x (t)={0 , t<0t , t ⩾ 0
Funkcja harmoniczna: x (t)=a sin(ω t )
Wymuszenie impulsowe (Delta Diraca): δ(t )={0, t<0 ∞ , t=00, t>0

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 82
Wykład 9
Transmitancja widmowa.Klasyfikacja podstawowych obiektów
automatyki.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 83
Transmitancja operatorowa
G(s)=Y (s)
X (s)
Dany jest liniowy niezależny od czasu układ typu SISOo ciągłym sygnale wejściowym x(t) i wyjściowym y(t)
Y (s) - transformata Laplace'a sygnału wyjściowego
X (s) - transformata Laplace'a sygnału wejściowego
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 84
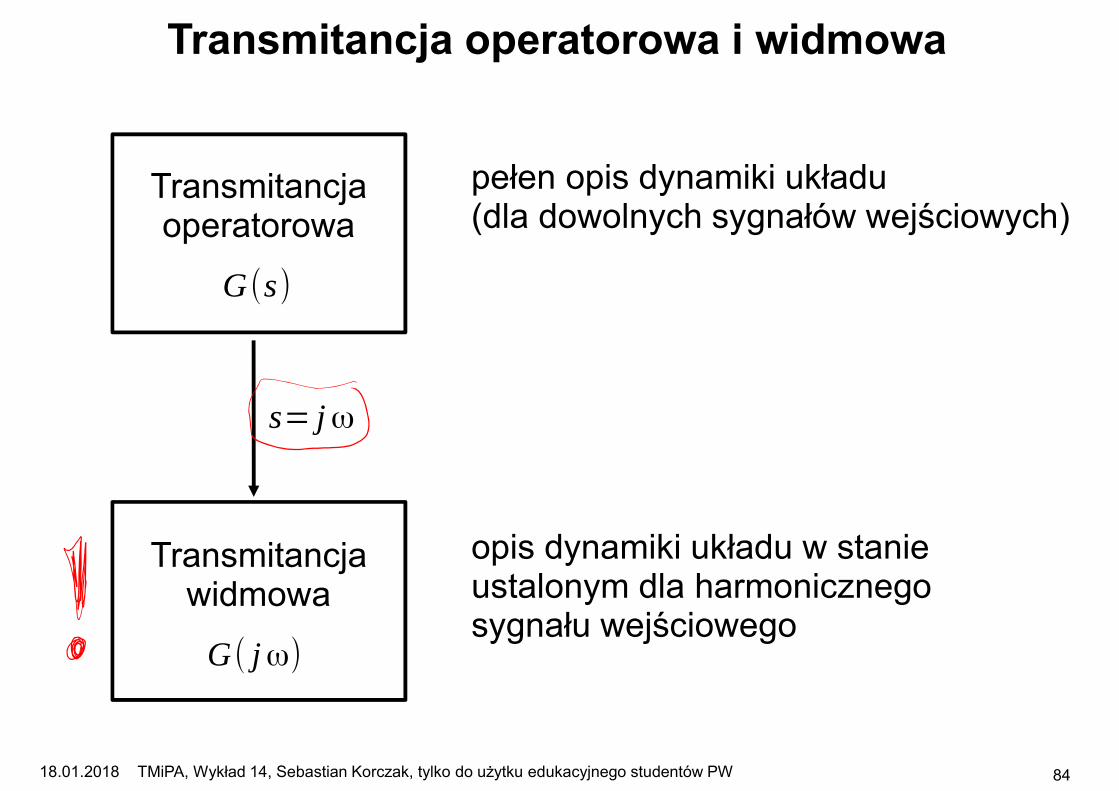
Transmitancja operatorowa i widmowa
G(s)
Transmitancja operatorowa
G( jω)
Transmitancjawidmowa
s= jω
pełen opis dynamiki układu(dla dowolnych sygnałów wejściowych)
opis dynamiki układu w stanie ustalonym dla harmonicznego sygnału wejściowego
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 85
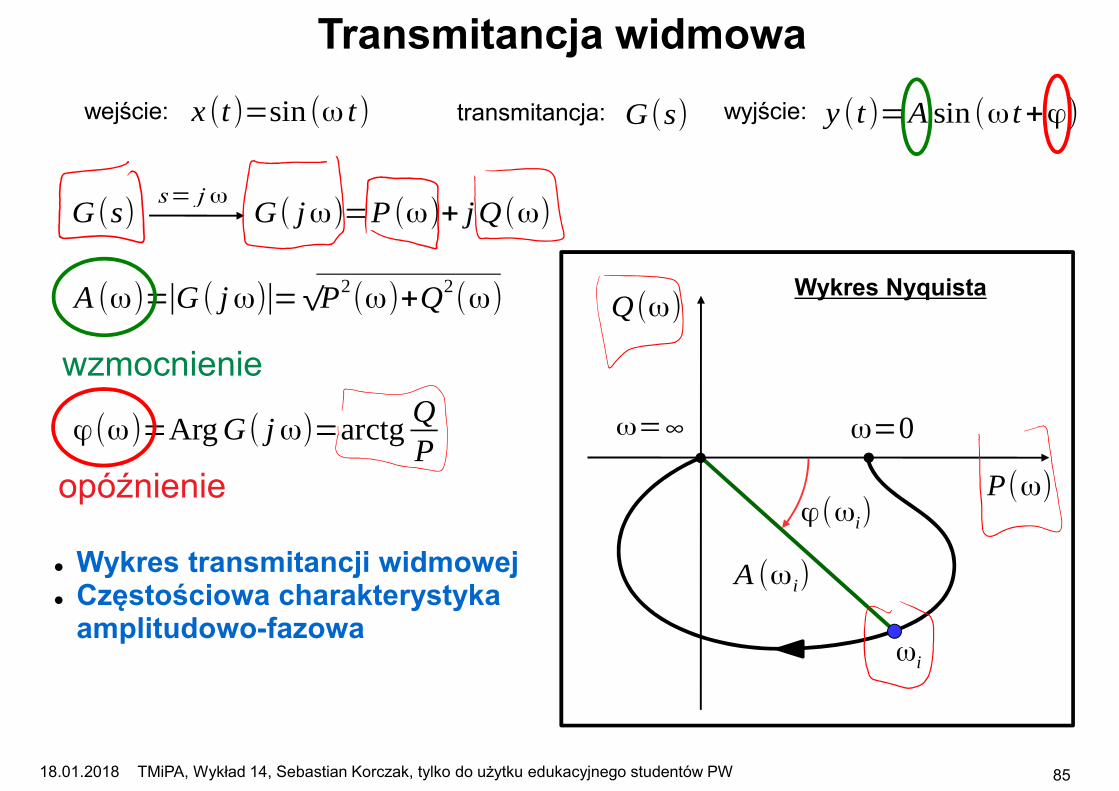
G(s) G( jω)=P (ω)+ jQ(ω)
A (ω)=|G ( jω)|= √P2(ω)+Q
2(ω)
φ (ω)=ArgG( jω)=arctgQ
PP(ω)
Q(ω)
ω=0ω= ∞
y (t)=A sin (ω t+φ)
Transmitancja widmowa
wejście: x (t)=sin (ω t) wyjście:G(s)transmitancja:
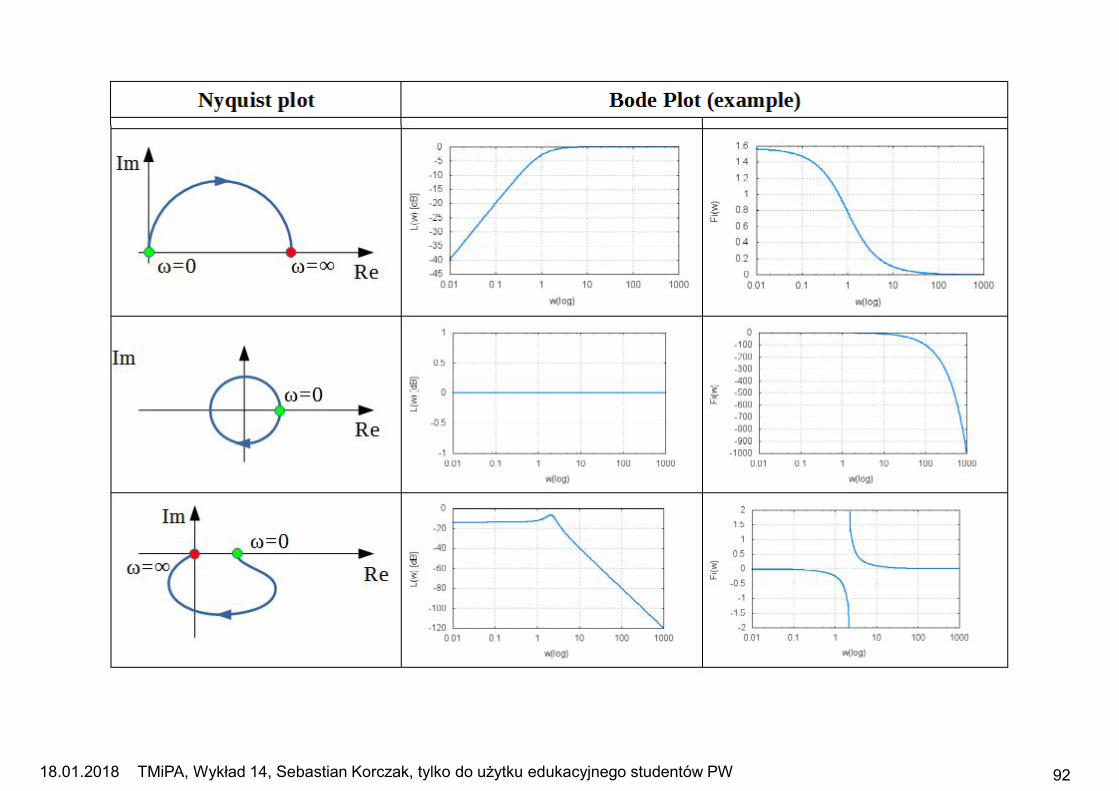
Wykres Nyquista
s= jω
Wykres transmitancji widmowej Częstościowa charakterystyka
amplitudowo-fazowa
φ (ωi)
A (ωi)
ωi
wzmocnienie
opóźnienie

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 86
φ(ω
) [r
ad]
wykres wzmocnienia(amplitudowo-częstościowy)
Wykres Bodego
y (t)=A sin (ω t+φ)wejście: x (t )=sin (ω t ) wyjście:G(s)
wykres przesunięcia fazowego(fazowo-częstościowy)
Transmitancja widmowa
ω [rad/s]
L(ω
) [d
B]
ω [rad/s]
L(ω)=20 log A (ω)
transmitancja:
oś pozioma w skali logarytmicznej, oś pionowa w skali liniowej!
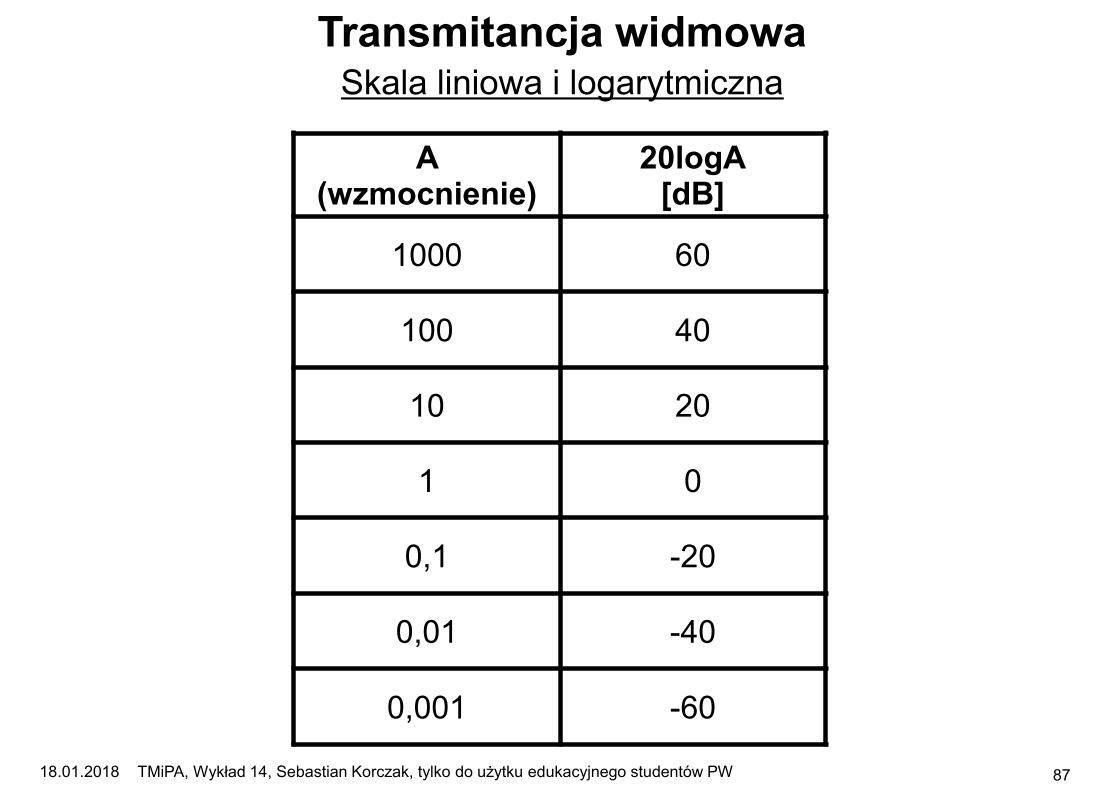
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 87
Skala liniowa i logarytmiczna
A (wzmocnienie)
20logA[dB]
1000 60
100 40
10 20
1 0
0,1 -20
0,01 -40
0,001 -60
Transmitancja widmowa
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 88
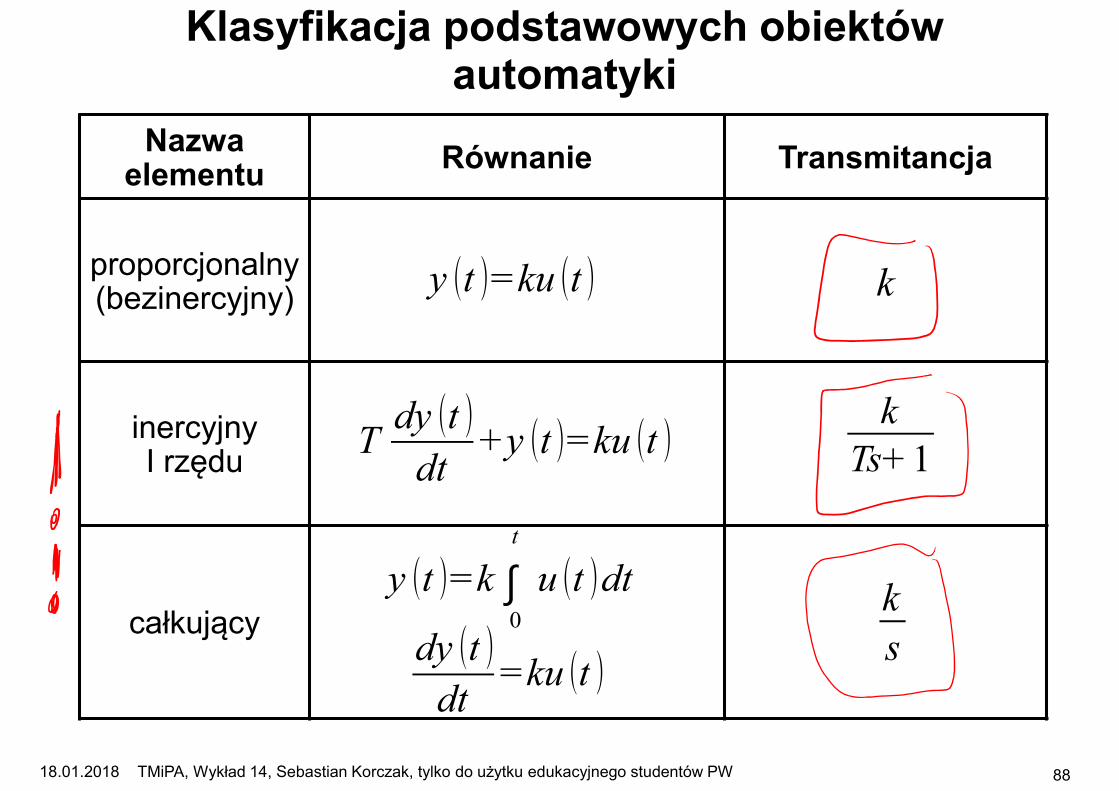
Klasyfikacja podstawowych obiektów automatyki
Nazwaelementu
Równanie Transmitancja
proporcjonalny (bezinercyjny) k
inercyjnyI rzędu
całkujący
y (t )=ku (t )
Tdy (t )
dt+y (t )=ku (t )
y (t )=k ∫0
t
u (t )dt
dy (t )
dt=ku (t )
k
Ts+1
k
s
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 89
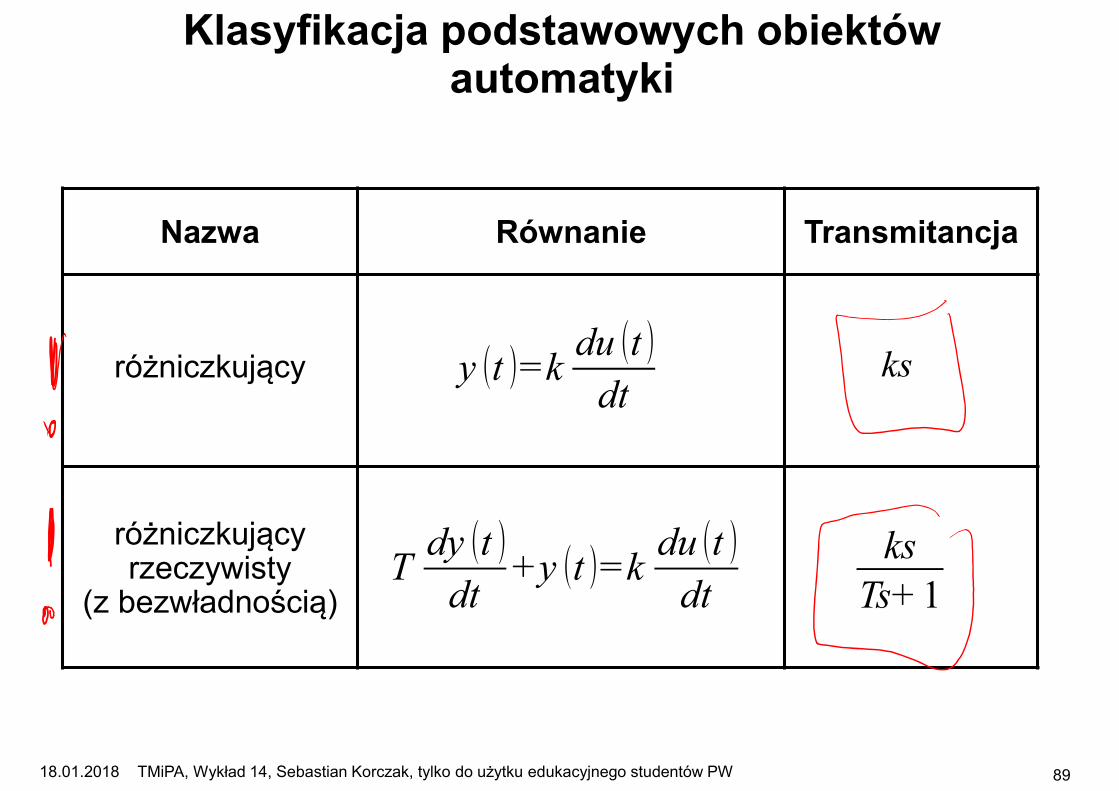
Klasyfikacja podstawowych obiektów automatyki
Nazwa Równanie Transmitancja
różniczkujący
różniczkujący rzeczywisty
(z bezwładnością)
y (t )=kdu (t )
dt
Tdy (t )
dt+y (t )=k
du (t )
dt
ks
ks
Ts+1
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 90
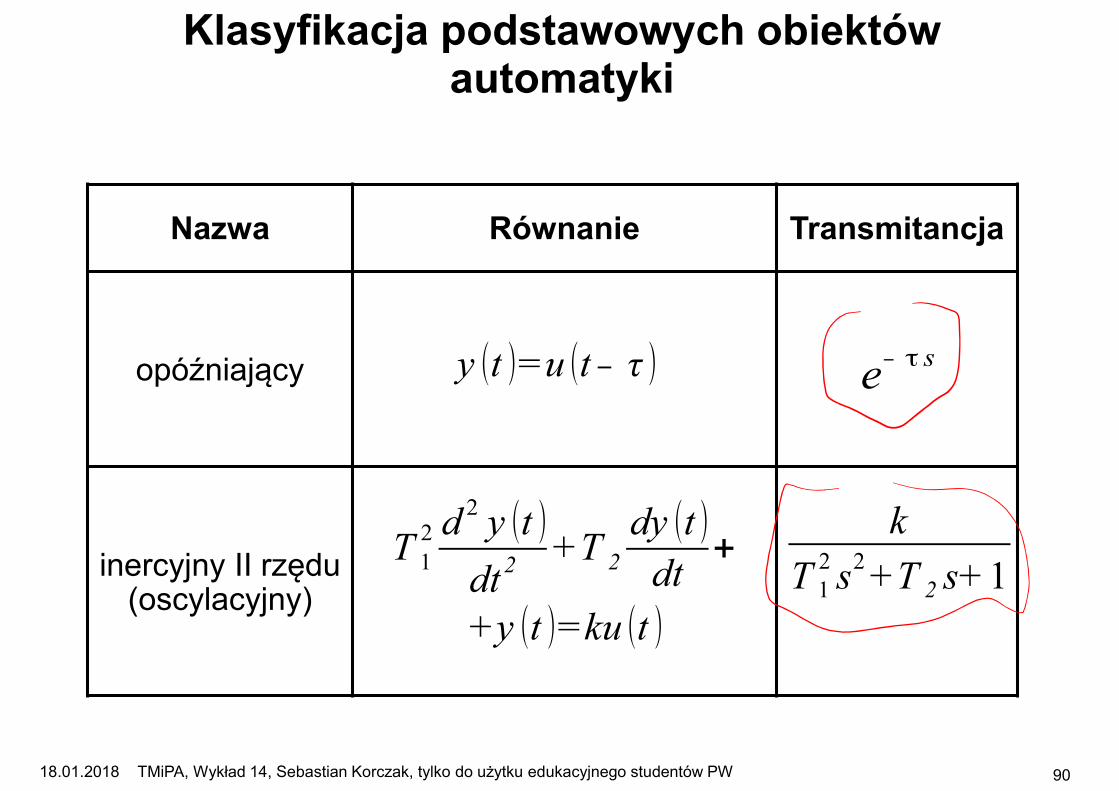
Klasyfikacja podstawowych obiektów automatyki
Nazwa Równanie Transmitancja
opóźniający
inercyjny II rzędu (oscylacyjny)
y (t )=u (t − τ )
T 1
2 d 2 y (t )
dt2
+T 2
dy (t )
dt+
+y (t )=ku (t )
e − τ s
k
T 12s
2+T 2 s+1

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 91
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 92

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 93
Wykład 10
Klasyfikacja podstawowych obiektówautomatyki z przykładami.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 94
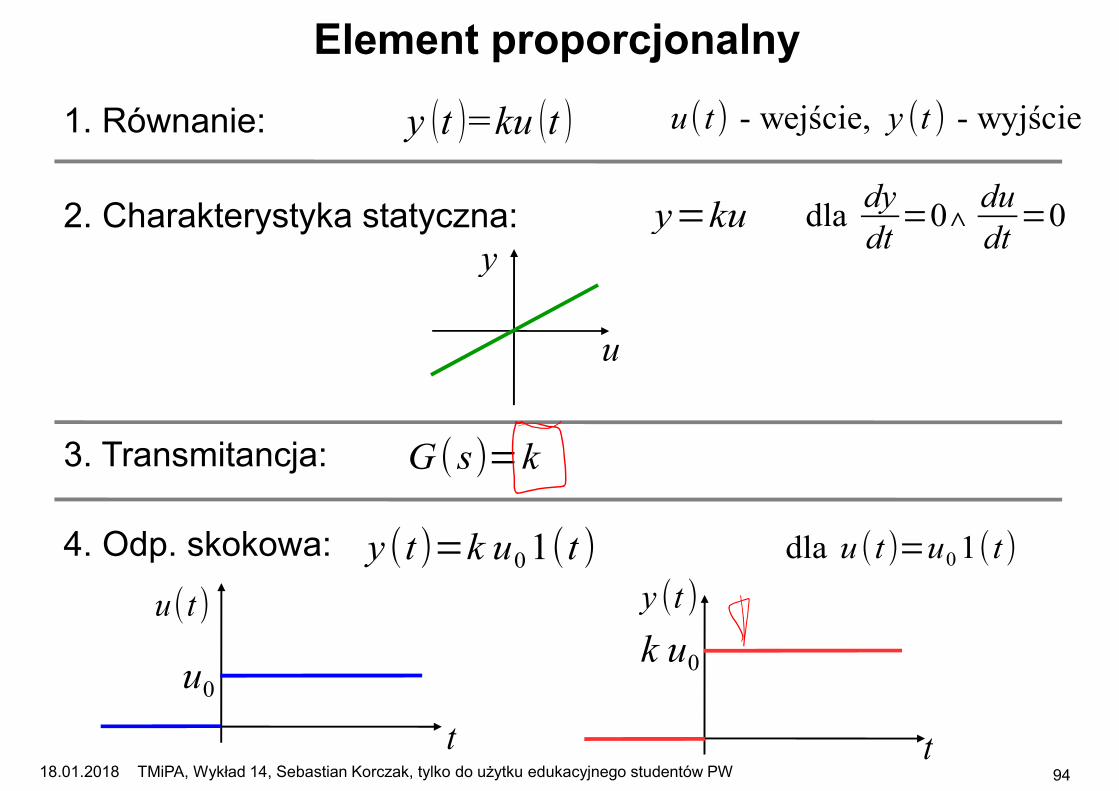
Element proporcjonalny
1. Równanie: y (t )=ku (t )
2. Charakterystyka statyczna: y=ku
3. Transmitancja: G(s)=k
4. Odp. skokowa: y (t)=k u0 1(t )
u
y
t
u0
u(t)
k u0
y (t )
t
u(t) - wejście, y (t ) - wyjście
dla u (t)=u0 1(t)
dla dydt
=0 ∧dudt
=0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 95
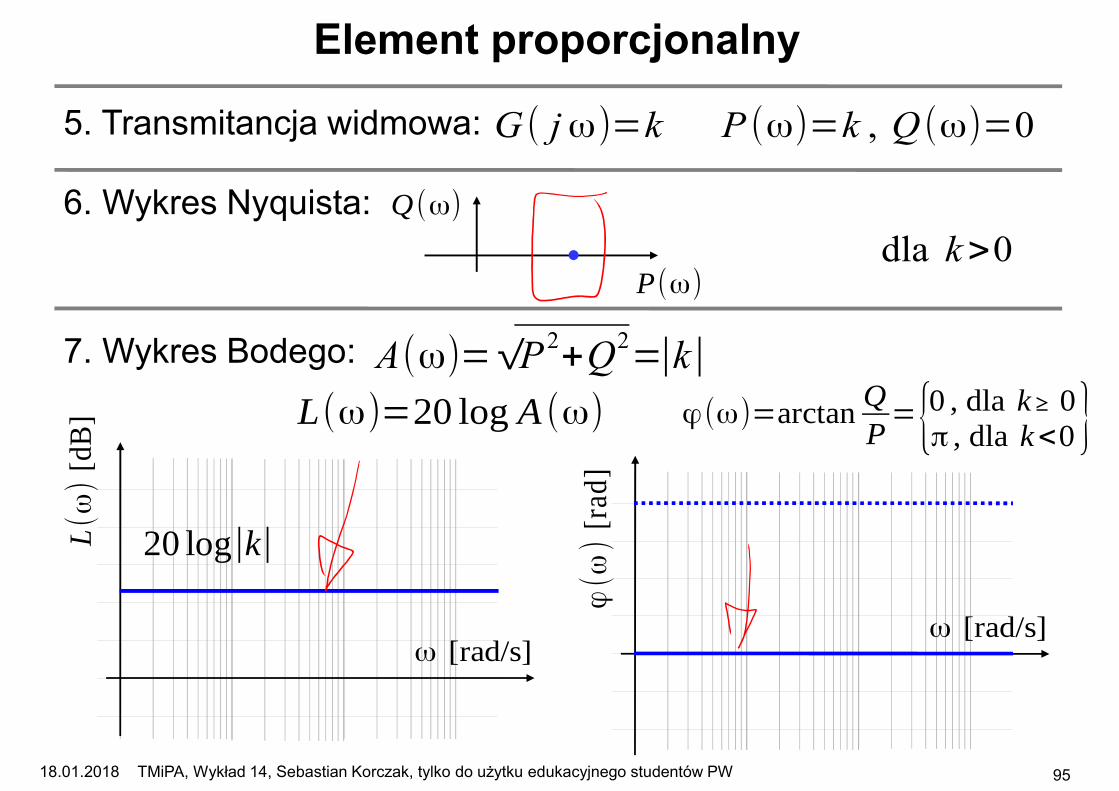
Element proporcjonalny
P (ω)=k , Q (ω)=0
6. Wykres Nyquista:
7. Wykres Bodego:
φ(ω
) [r
ad]
ω [rad/s]
L(ω
) [d
B]
ω [rad/s]
L(ω)=20 log A (ω) φ (ω)=arctanQP={0 , dla k ≥ 0
π , dla k<0}
20 log|k|
G( jω)=k5. Transmitancja widmowa:
P(ω)
Q(ω)
A(ω)= √P2+Q
2=|k|
dla k>0

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 96
Element proporcjonalnyPrzykłady
1przekładnia zębata:wejście – prędkość kątowa ω1(t)wyjście – prędkość kątowa ω2(t)
przekładnia zębata:wejście – kąt obrotu φ1(t)wyjście – kąt obrotu φ2(t)
ω1(t)
ω2(t)
2φ1(t)
φ2(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 97
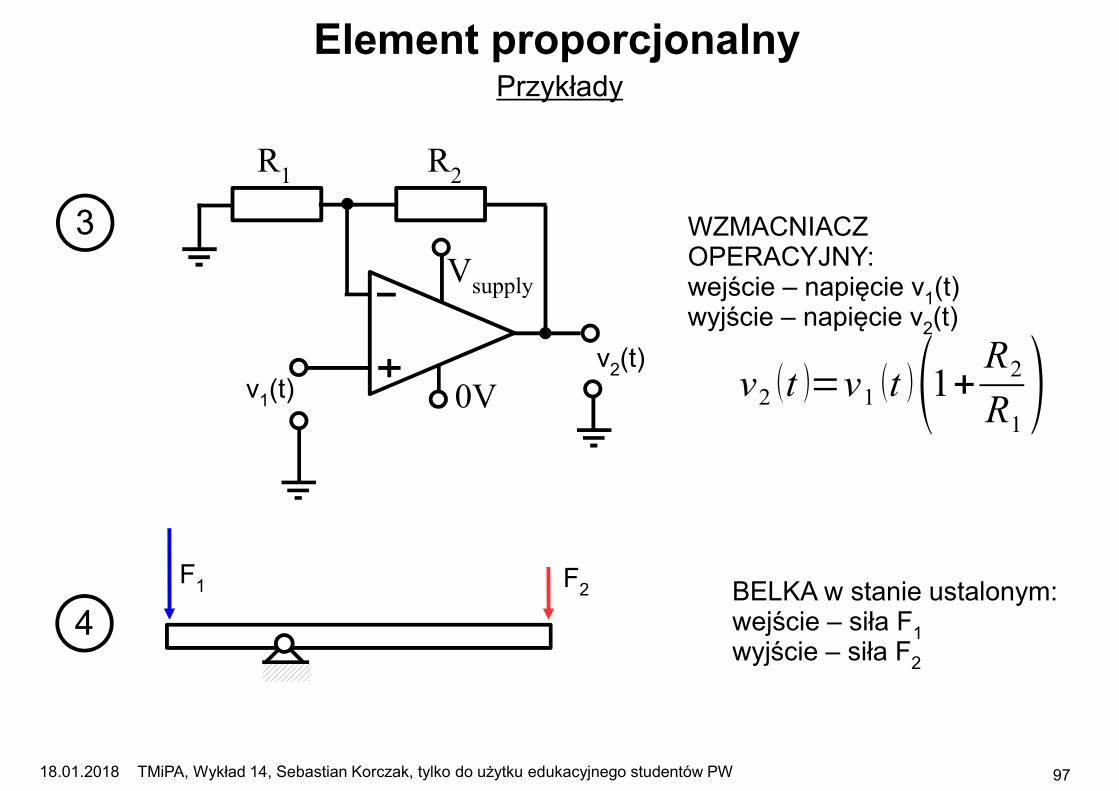
Element proporcjonalnyPrzykłady
4BELKA w stanie ustalonym:wejście – siła F1wyjście – siła F2
F1 F2
3 WZMACNIACZ OPERACYJNY:wejście – napięcie v1(t)wyjście – napięcie v2(t)
Vsupply
0Vv2(t)
v1(t)
R2R1
v2 (t )=v1 (t )(1+R2
R1)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 98
Element proporcjonalnyPrzykłady
5
PODNOŚNIK HYDRAULICZNY:wejście – przemieszczenie x1(t)wyjście – przemieszczenie x2(t)
x1(t)
x2(t)
6 SIŁOWNIK PNEUMATYCZNY:wejście – ciśnienie p1(t)wyjście – przemieszczenie x(t)
x(t)
p(t)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 99
Element inercyjny pierwszego rzędu
1. Równanie:
2. Charakterystyka statyczna: y=ku
3. Transmitancja: G(s)=k
Ts+1
u
y
Tdy (t )
dt+y (t )=ku (t ) u(t) - wejście
y (t ) - wyjście
dla dydt
=0 ∧dudt
=0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 100
Element inercyjny pierwszego rzędu
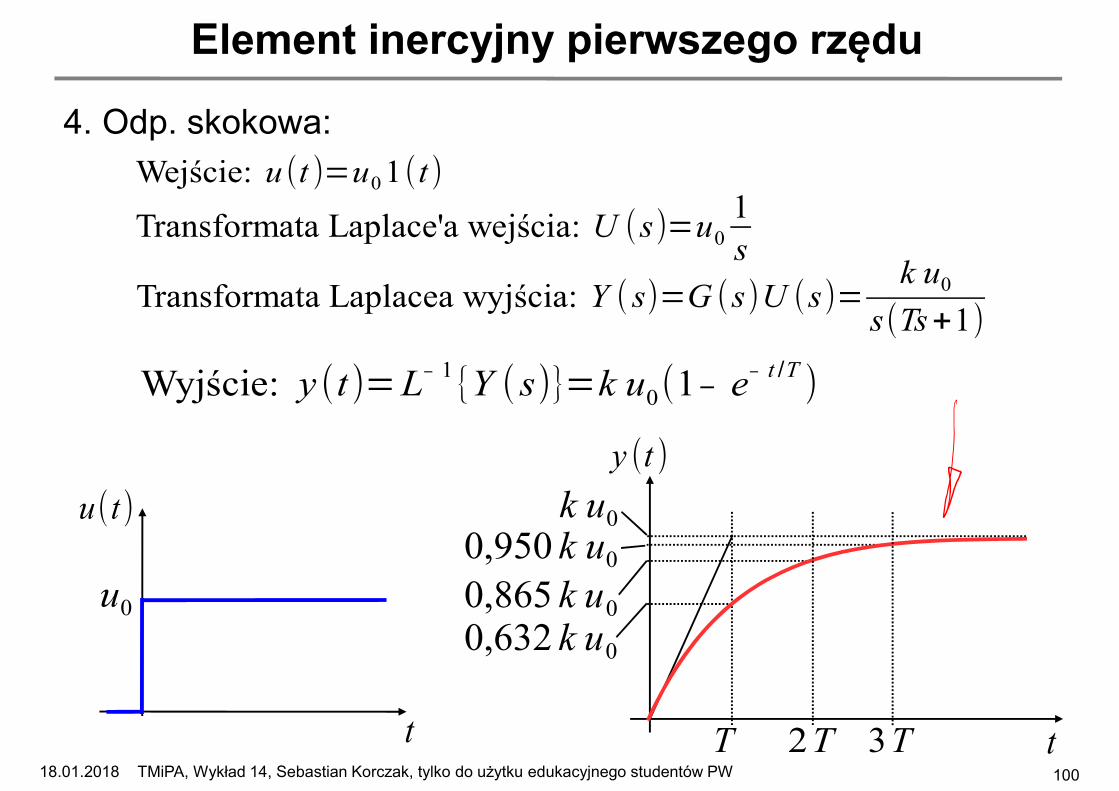
4. Odp. skokowa:
Wejście: u (t )=u0 1(t)
u0
u(t)
Transformata Laplace'a wejścia: U (s)=u0
1
s
Transformata Laplacea wyjścia: Y ( s)=G (s)U (s)=k u0
s(Ts+1)
Wyjście: y (t)=L − 1{Y (s)}=k u0(1 − e − t /T )
k u0
y (t )
tT 2T 3T
0,950 k u0
0,865 k u0
0,632 k u0
t

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 101
Element inercyjny pierwszego rzędu
5. Transmitancja widmowa:
6. Wykres Nyquista:
P (ω)=k
T 2ω2+1, Q (ω)=
− k T ω
T 2ω2+1
P(ω)
Q(ω)
ω=0ω= ∞
k /2 k0
− k /2ω=1/T
zał.: k>0
G ( jω)=k
Tjω+1

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 102
Element inercyjny pierwszego rzędu
7. Wykres Bodego:
L(ω)=20 log A (ω)=20 log|k| − 20 log √T 2ω2+1
φ (ω)=arctanQ
P=arctan ( − T ω)
L(ω
) [d
B] ω [rad/s]1
10T1
T
20 log|k| − 3
10 /T
20 log|k| − 20φ(ω
) [r
ad]
− π2
− π4
1T
10T
ω [rad/s]
100T
110T
1100T
20 log|k|
20 log|k| − 40
A(ω)= √P2+Q
2=|k|/ √T
2ω
2+1
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 103
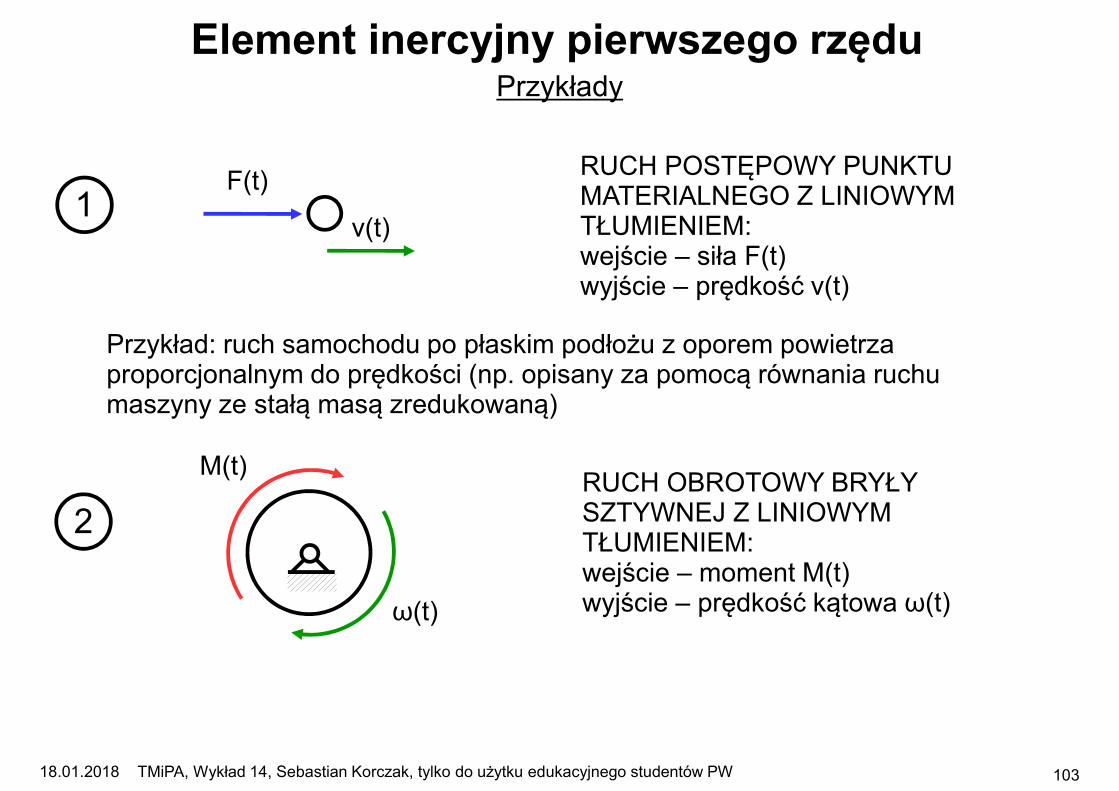
Element inercyjny pierwszego rzęduPrzykłady
1RUCH POSTĘPOWY PUNKTU MATERIALNEGO Z LINIOWYM TŁUMIENIEM:wejście – siła F(t)wyjście – prędkość v(t)
F(t)
v(t)
Przykład: ruch samochodu po płaskim podłożu z oporem powietrza proporcjonalnym do prędkości (np. opisany za pomocą równania ruchu maszyny ze stałą masą zredukowaną)
2RUCH OBROTOWY BRYŁY SZTYWNEJ Z LINIOWYM TŁUMIENIEM:wejście – moment M(t)wyjście – prędkość kątowa ω(t)
M(t)
ω(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 104
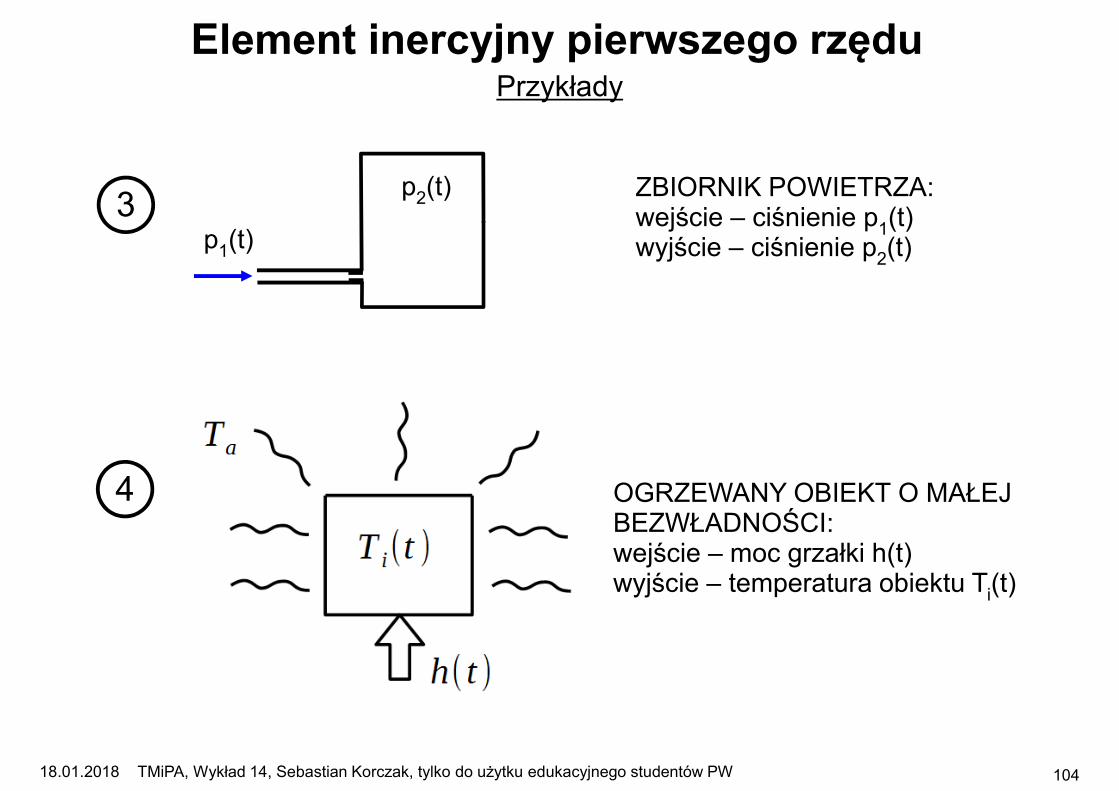
Element inercyjny pierwszego rzęduPrzykłady
3p1(t)
p2(t)
4 OGRZEWANY OBIEKT O MAŁEJ BEZWŁADNOŚCI:wejście – moc grzałki h(t)wyjście – temperatura obiektu Ti(t)
ZBIORNIK POWIETRZA:wejście – ciśnienie p1(t)wyjście – ciśnienie p2(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 105
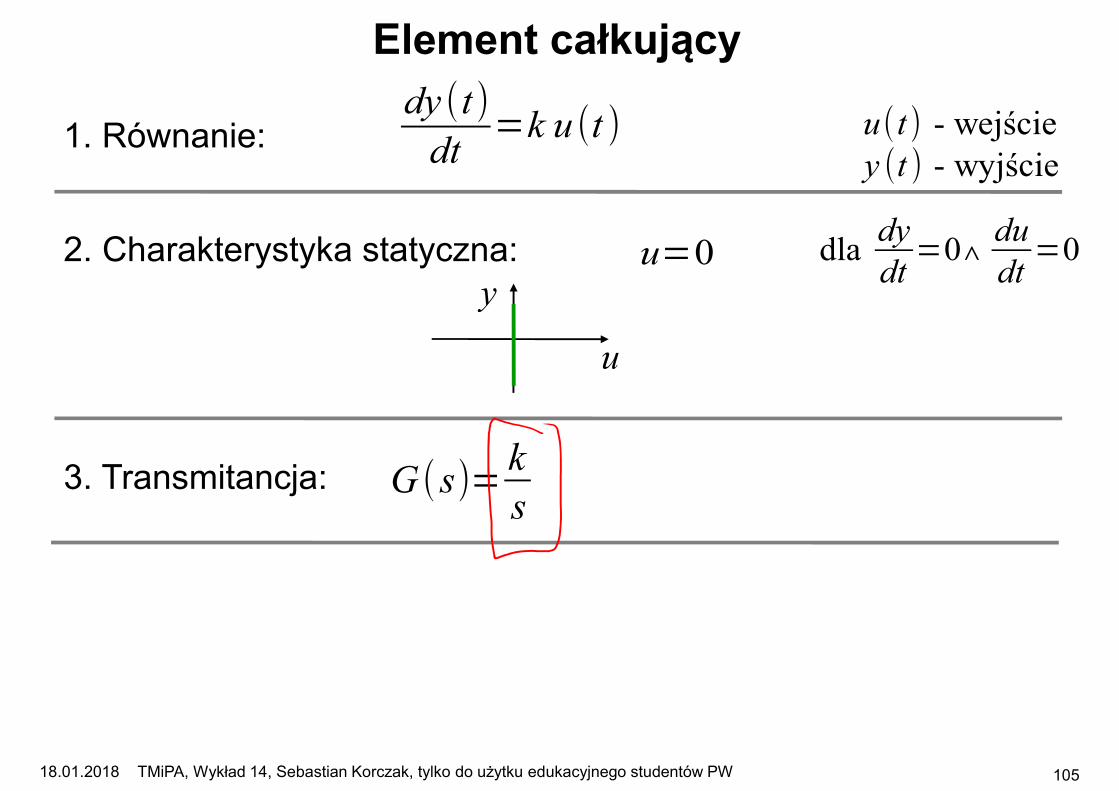
Element całkujący
1. Równanie:
2. Charakterystyka statyczna:
3. Transmitancja: G (s)=ks
dy (t)
dt=k u(t )
u=0
u
y
u(t) - wejściey (t ) - wyjście
dla dydt
=0 ∧dudt
=0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 106
Element całkujący
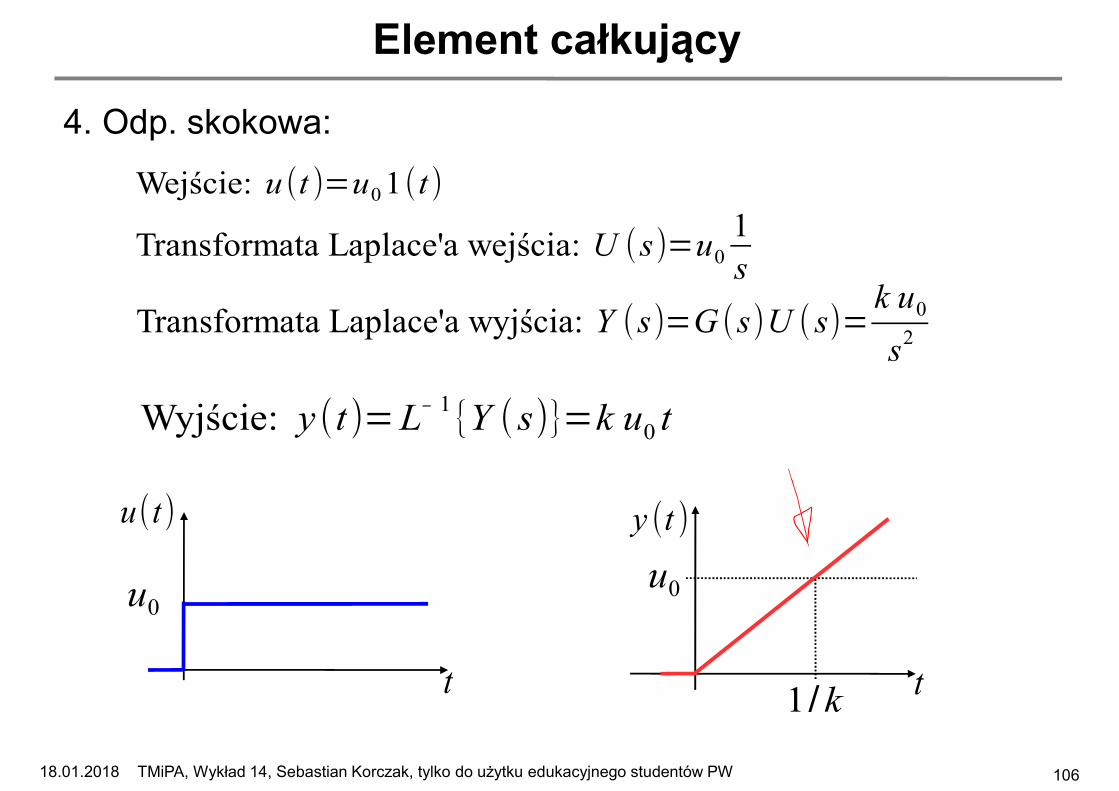
4. Odp. skokowa:
Wejście: u (t )=u0 1(t)
u0
u(t)
u0
y (t )
t
Transformata Laplace'a wejścia: U (s)=u0
1
s
Wyjście: y (t)=L − 1{Y (s)}=k u0 t
1/kt
Transformata Laplace'a wyjścia: Y (s)=G (s)U ( s)=k u0
s2
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 107
Element całkujący
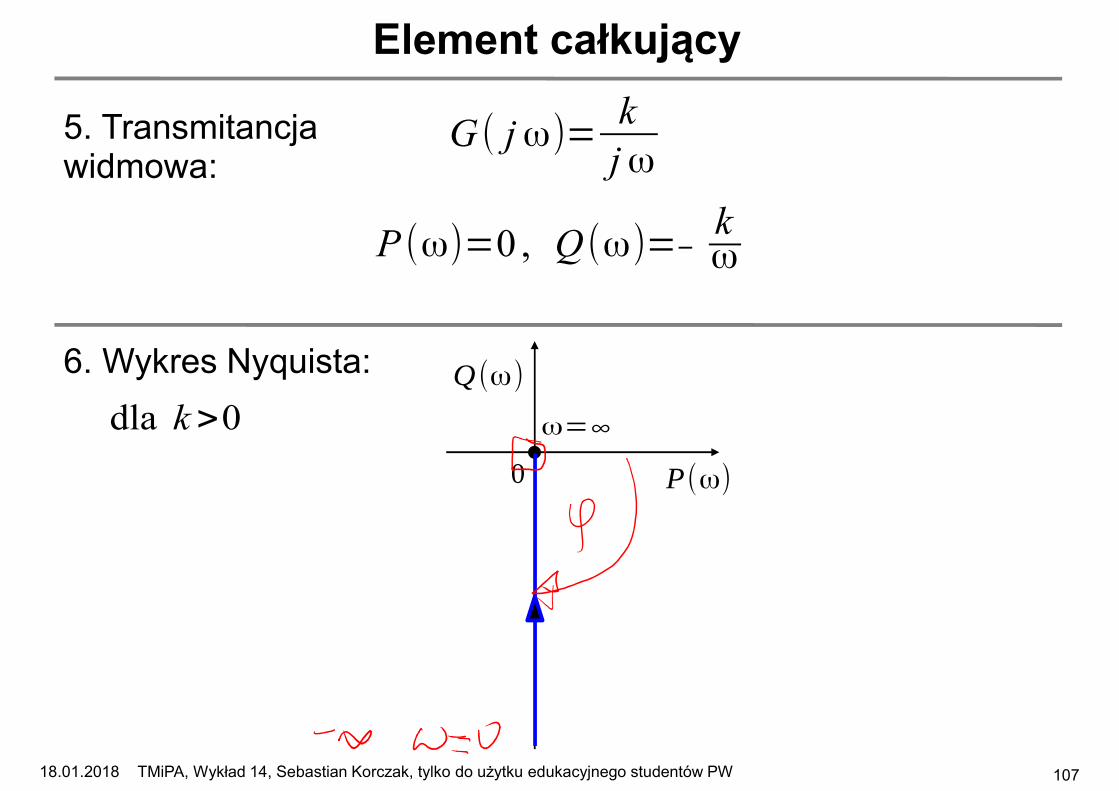
5. Transmitancja widmowa:
6. Wykres Nyquista:
P (ω)=0 , Q(ω)= −kω
P(ω)
Q(ω)
ω= ∞
0
dla k>0
G ( jω)=kjω
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 108
Element całkujący
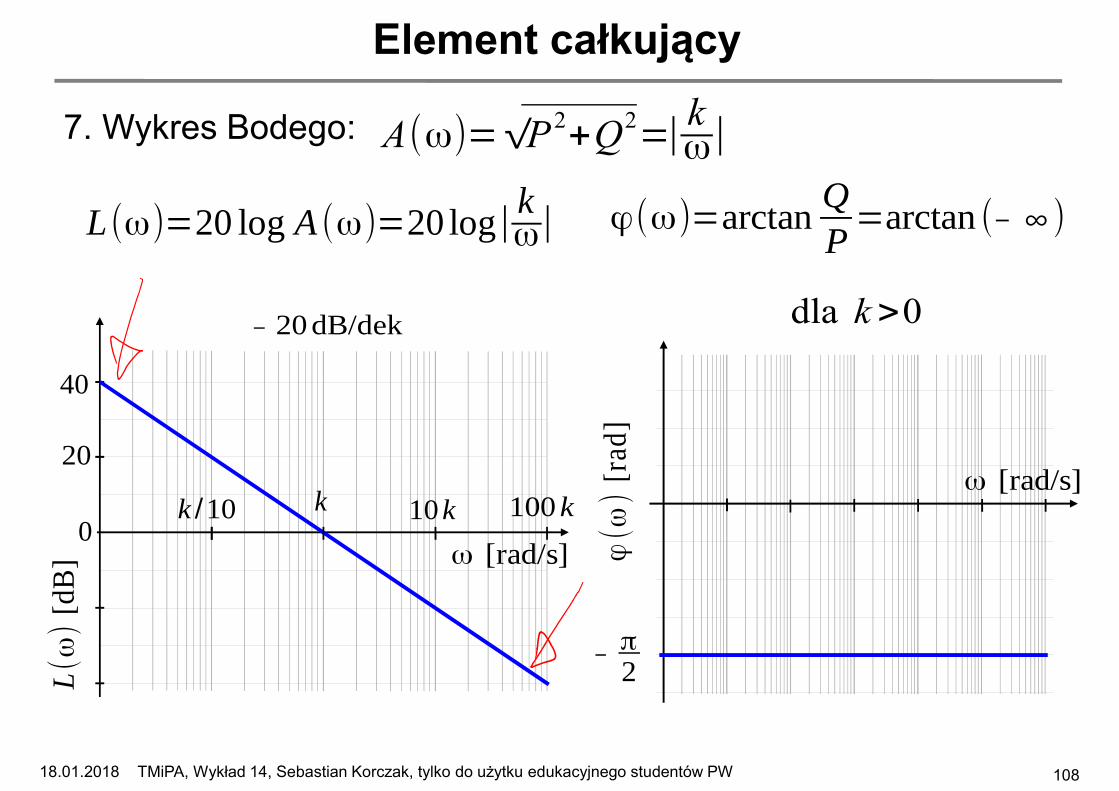
7. Wykres Bodego:
L(ω)=20 log A (ω)=20 log|kω|
A(ω)= √P2+Q2=|kω|
φ (ω)=arctanQ
P=arctan ( − ∞)
φ(ω
) [r
ad]
− π2
ω [rad/s]
dla k>0
L(ω
) [d
B] ω [rad/s]
k /10 k
− 20 dB/dek
10k0
20
40
100k
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 109
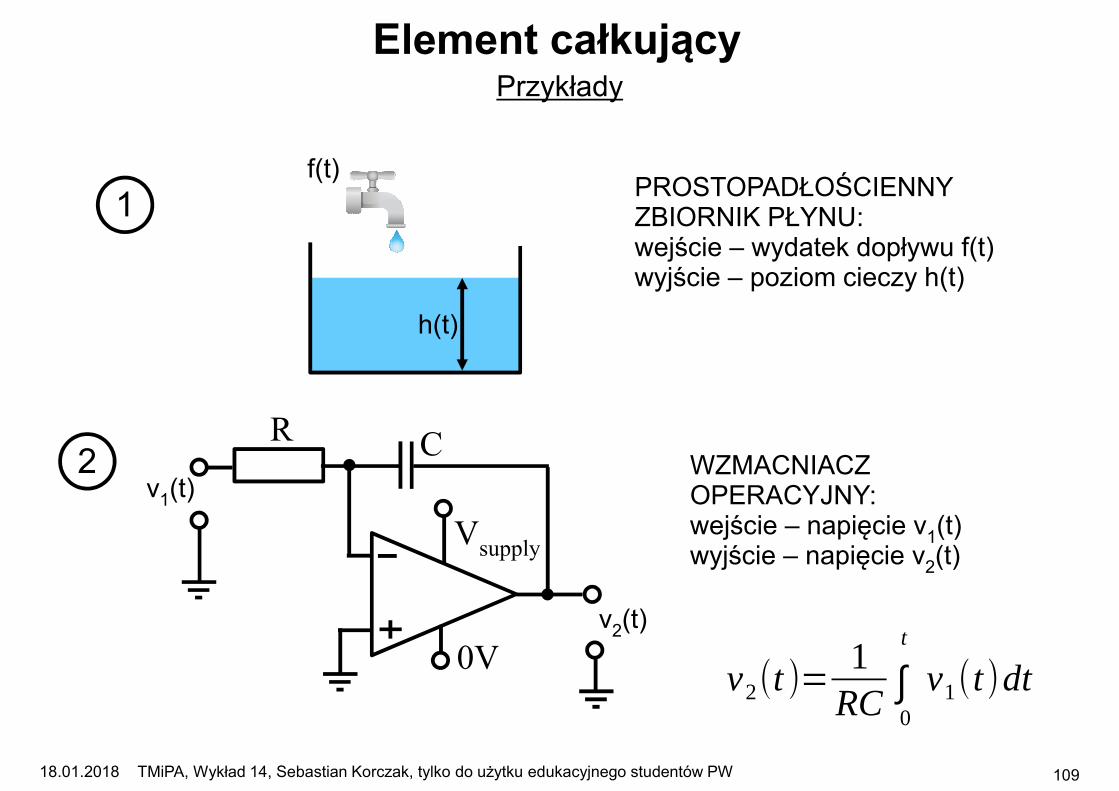
Element całkującyPrzykłady
1
h(t)
f(t)
2 WZMACNIACZ OPERACYJNY:wejście – napięcie v1(t)wyjście – napięcie v2(t)
Vsupply
0Vv2(t)
v1(t)
CR
v2(t )=1
RC ∫0
t
v1(t)dt
PROSTOPADŁOŚCIENNY ZBIORNIK PŁYNU:wejście – wydatek dopływu f(t)wyjście – poziom cieczy h(t)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 110
Element całkującyPrzykłady
3przekładnia zębata:wejście – prędkość kątowa ω(t)wyjście – kąt obrotu φ(t)
ω(t)
φ(t)
4 CYLINDER HYDRAULICZNY:wejście – wydatek cieczy f(t)wyjście – przemieszczenie x(t)
x(t)
f(t)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 111
Element różniczkujący idealny
1. Równanie:
2. Charakterystyka statyczna: y=0
3. Transmitancja: G(s)=k s
u
y
y (t)=kdu(t)
dtu(t) - wejściey (t ) - wyjście
dla dydt
=0 ∧dudt
=0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 112
Element różniczkujący idealny
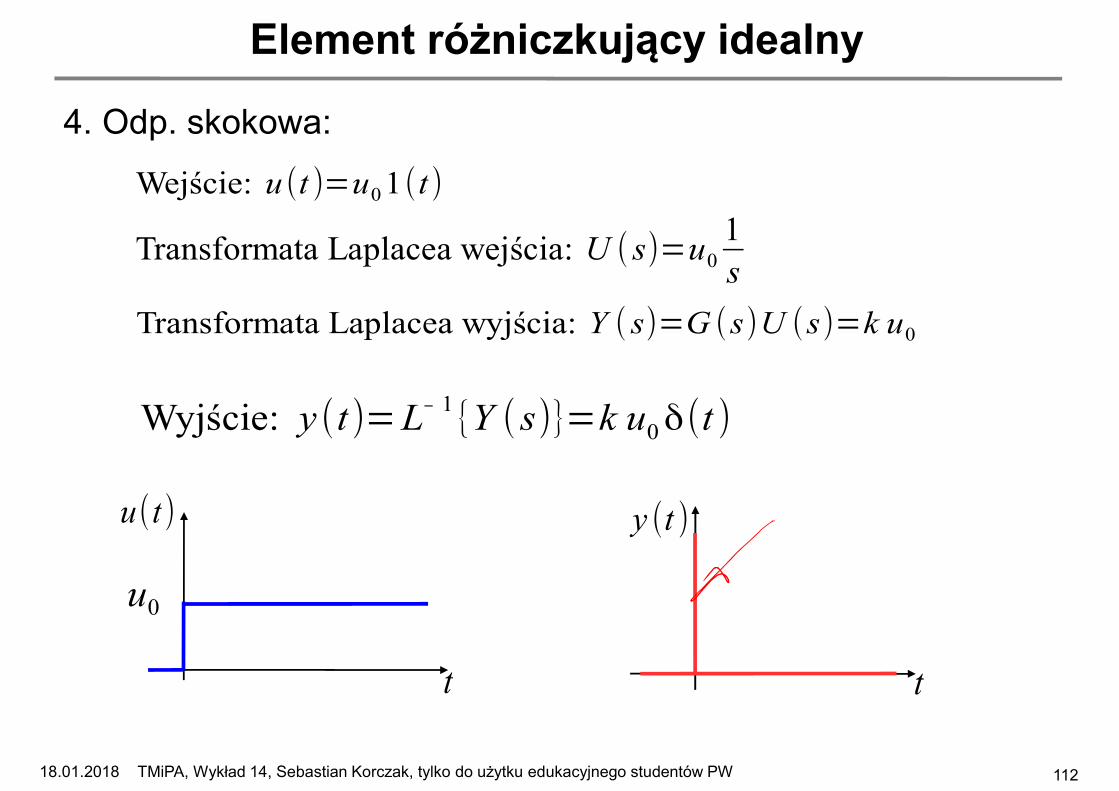
4. Odp. skokowa:
Wejście: u (t )=u0 1(t)
u0
u(t) y (t )
t
Transformata Laplacea wejścia: U ( s)=u0
1
s
Wyjście: y (t)=L − 1{Y (s)}=k u0δ(t )
t
Transformata Laplacea wyjścia: Y ( s)=G (s)U (s)=k u0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 113
Element różniczkujący idealny
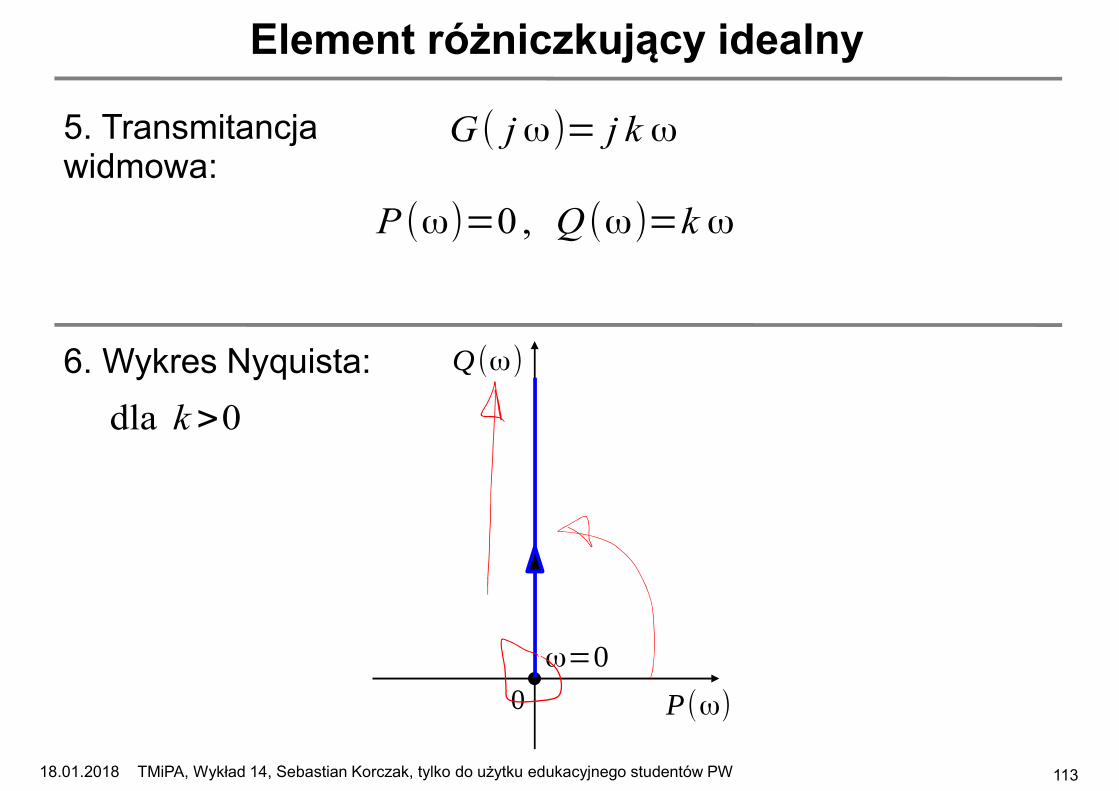
5. Transmitancja widmowa:
6. Wykres Nyquista:
P (ω)=0 , Q (ω)=k ω
P(ω)
Q(ω)
ω=0
0
dla k>0
G ( jω)= j k ω
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 114
Element różniczkujący idealny
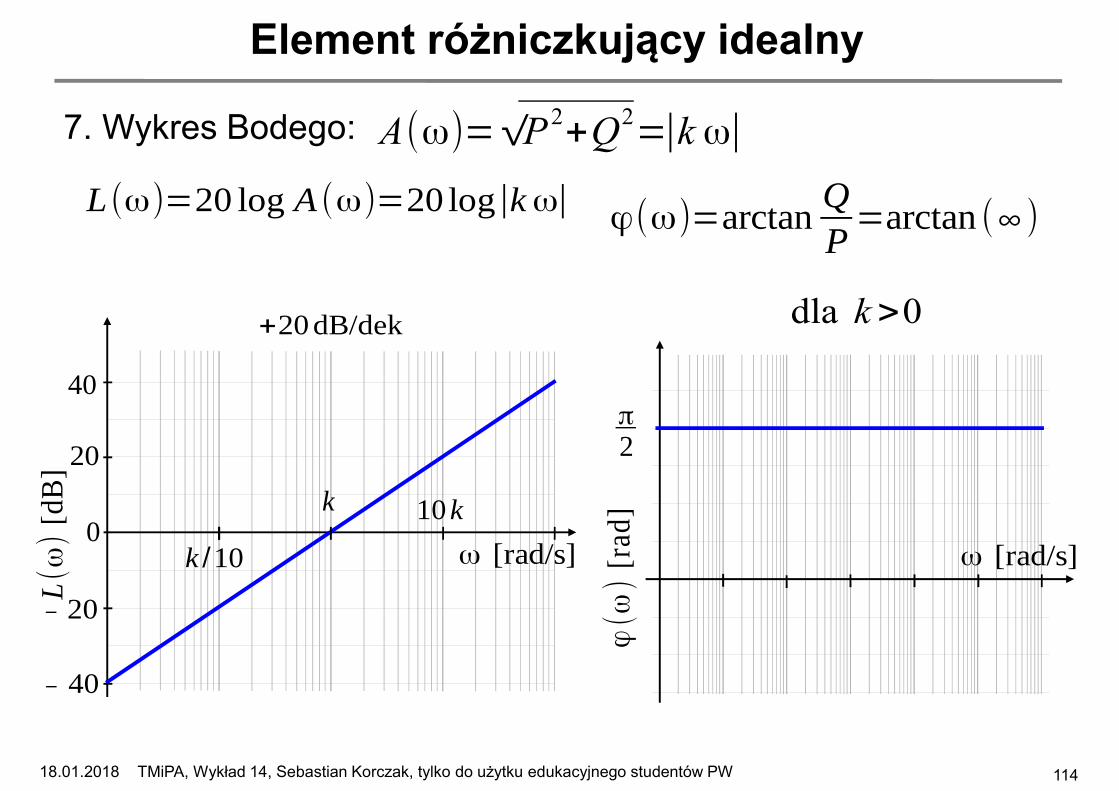
7. Wykres Bodego:
L(ω)=20 log A (ω)=20 log|kω| φ (ω)=arctanQ
P=arctan ( ∞)
φ(ω
) [r
ad]
π2
ω [rad/s]
dla k>0
L(ω
) [d
B]
ω [rad/s]k /10
k
+20 dB/dek
10k0
20
40
− 20
− 40
A(ω)= √P2+Q
2=|k ω|

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 115
Element różniczkujący idealnyPrzykłady
1PRZEKŁADNIA ZĘBATA:wejście – kąt obrotu φ(t)wyjście – prędkość kątowa ω(t)
ω(t)
φ(t)
2 WZMACNIACZ OPERACYJNY:wejście – napięcie v1(t)wyjście – napięcie v2(t)
v2(t )= − RCdv1(t )
dt
Vsupply
0Vv2(t)
v1(t)
C R
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 116
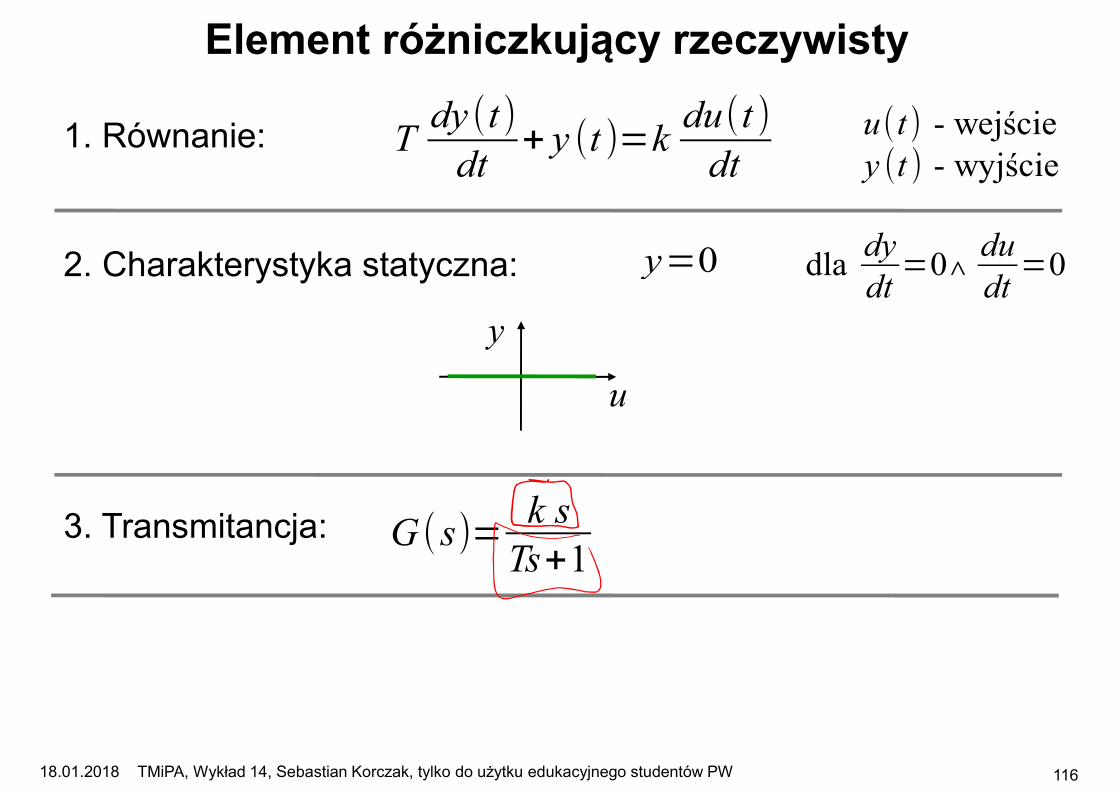
Element różniczkujący rzeczywisty
1. Równanie:
2. Charakterystyka statyczna:
3. Transmitancja: G(s)=k s
Ts+1
Tdy (t)
dt+ y (t )=k
du(t )
dt
y=0
u
y
u(t) - wejściey (t ) - wyjście
dla dydt
=0 ∧dudt
=0

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 117
Element różniczkujący rzeczywisty
4. Odp. skokowa:
Wejście: u (t )=u0 1(t)
Transformata Laplacea wejścia: U ( s)=u0
1
s
Wyjście: y (t)=L − 1{Y (s)}=k u0 e − t /T
k u0
y (t )
tT 2T 3T0,050 k u0
0,135 k u0
0,368 k u0u0
u(t)
t
Transformata Laplacea wyjścia: Y ( s)=G (s)U (s)=k u0
Ts+1

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 118
Element różniczkujący rzeczywisty
5. Transmitancja widmowa:
6. Wykres Nyquista:
P (ω)=k T ω2
T 2ω2+1, Q (ω)=
k ω
T 2ω2+1
P(ω)
Q(ω)
ω=0 ω= ∞
k2T
k
T
0
− k /2ω=1/T
dla k>0
G ( jω)=k jω
Tjω+1
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 119
Element różniczkujący rzeczywisty
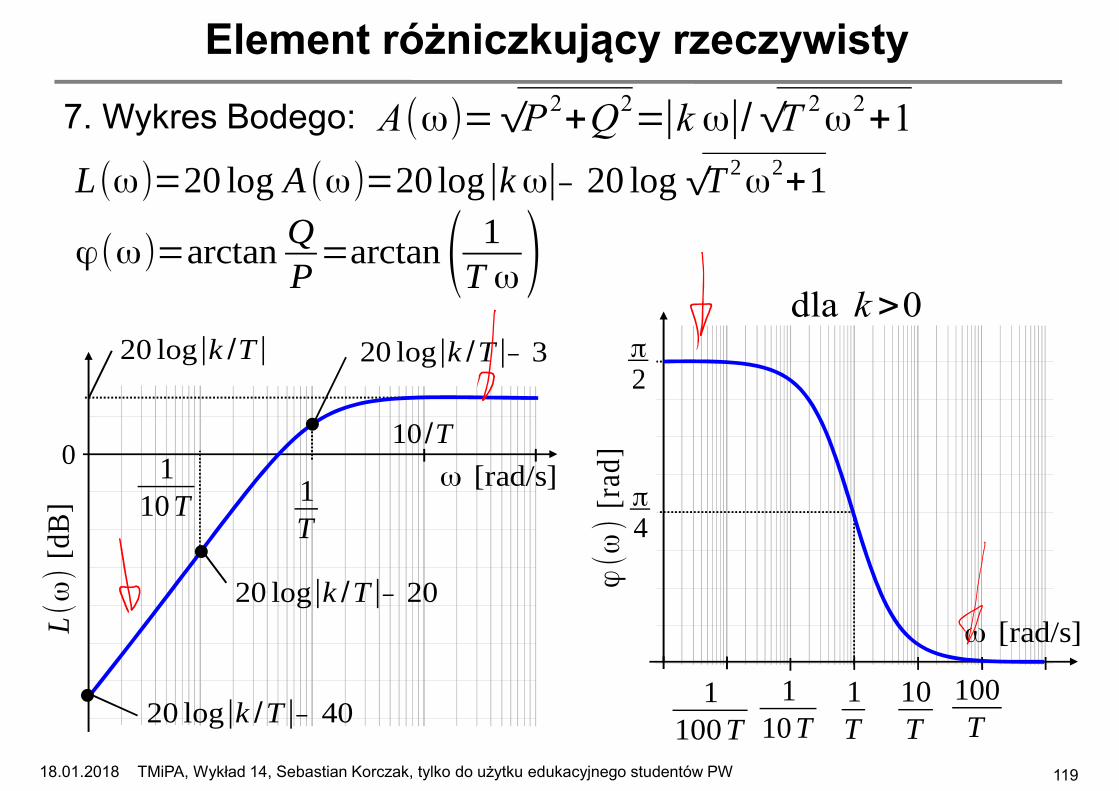
7. Wykres Bodego:
L(ω)=20 log A (ω)=20 log|kω| − 20 log √T 2ω2+1
φ (ω)=arctanQ
P=arctan( 1
T ω)
φ(ω
) [r
ad]
π2
π4
1T
10T
ω [rad/s]
100T
110T
1100T
dla k>0
L(ω
) [d
B]
ω [rad/s]110T
1T
20 log|k /T| − 3
10 /T
20 log|k /T| − 20
20 log|k /T|
20 log|k /T| − 40
0
A(ω)= √P2+Q
2=|k ω|/ √T
2ω
2+1
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 120
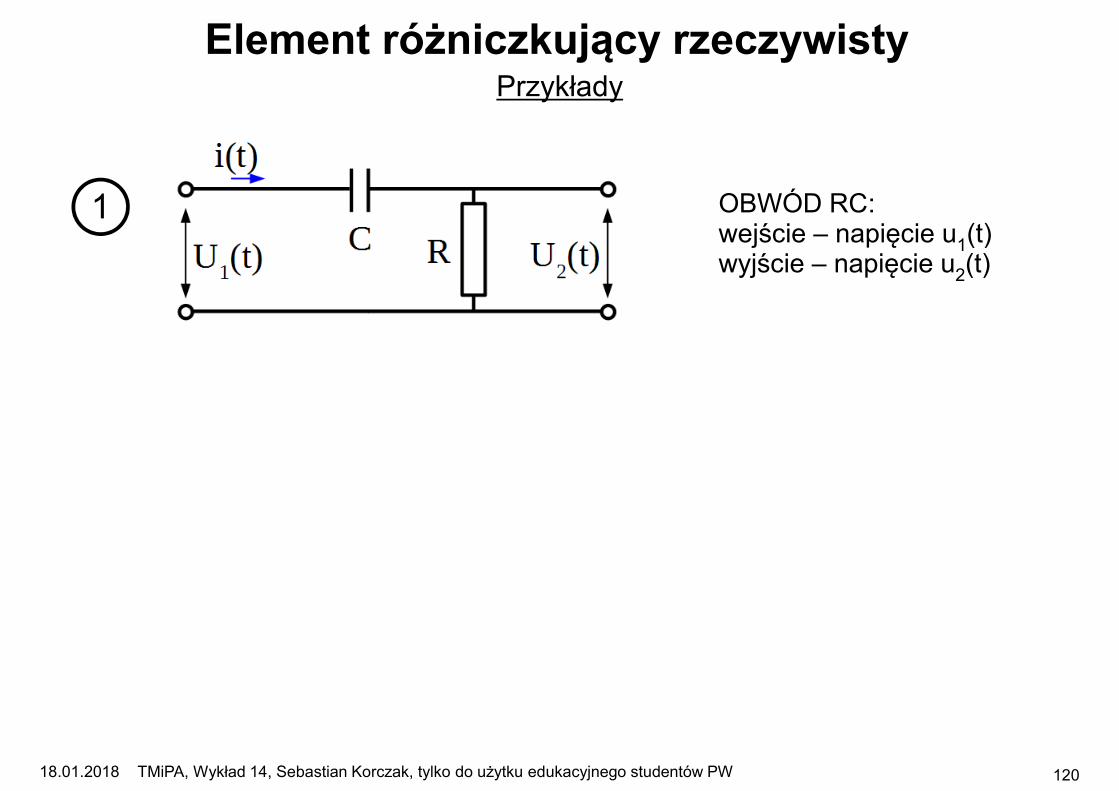
Element różniczkujący rzeczywistyPrzykłady
1 OBWÓD RC:wejście – napięcie u1(t)wyjście – napięcie u2(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 121
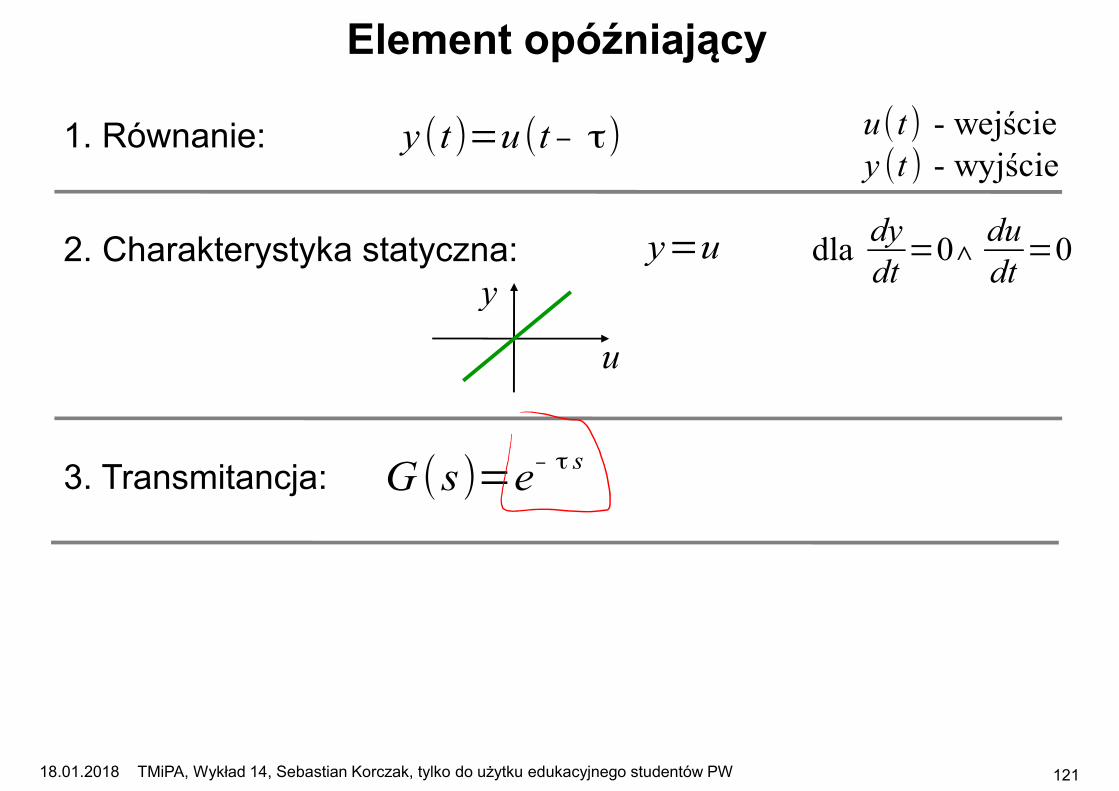
Element opóźniający
1. Równanie:
2. Charakterystyka statyczna: y=u
3. Transmitancja: G (s)=e− τ s
u
y
y (t)=u(t− τ) u(t) - wejściey (t ) - wyjście
dla dydt
=0 ∧dudt
=0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 122
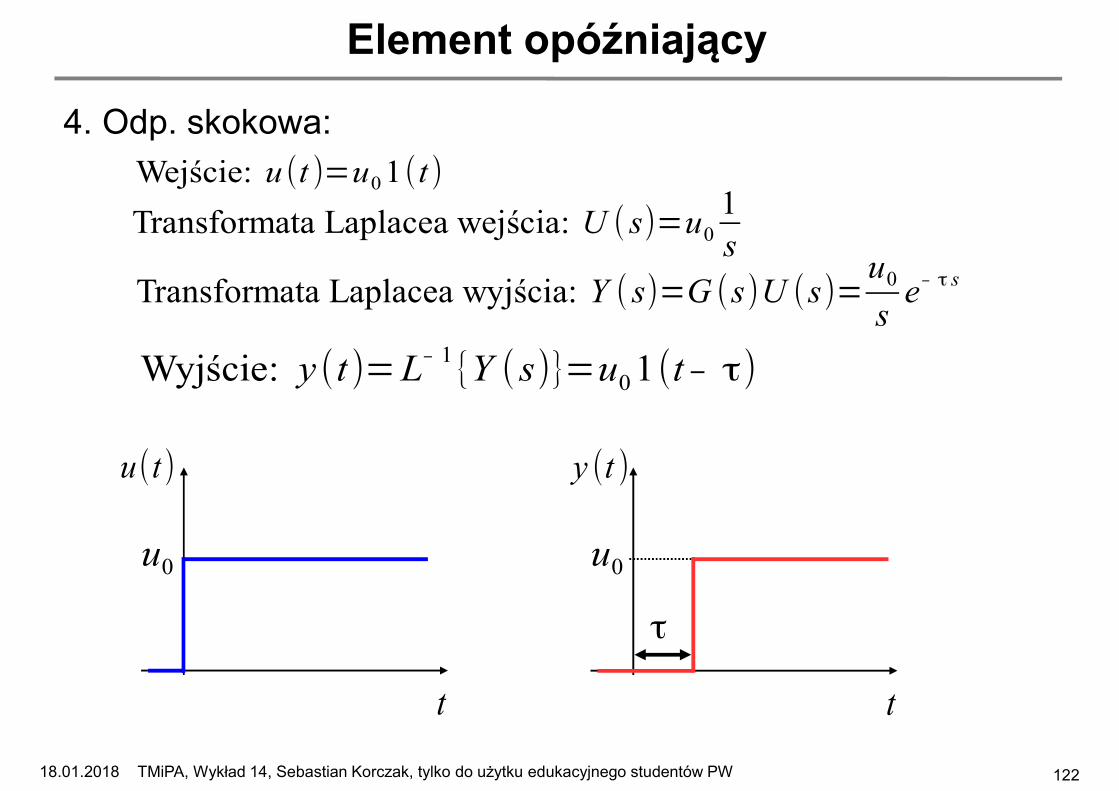
Element opóźniający
4. Odp. skokowa:
u0
u(t)
t
u0
y (t )
t
τ
Wejście: u (t )=u0 1(t)
Transformata Laplacea wejścia: U ( s)=u0
1
s
Wyjście: y (t)=L − 1{Y (s)}=u0 1(t − τ)
Transformata Laplacea wyjścia: Y ( s)=G (s)U (s)=u0
se − τ s
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 123
Element opóźniający
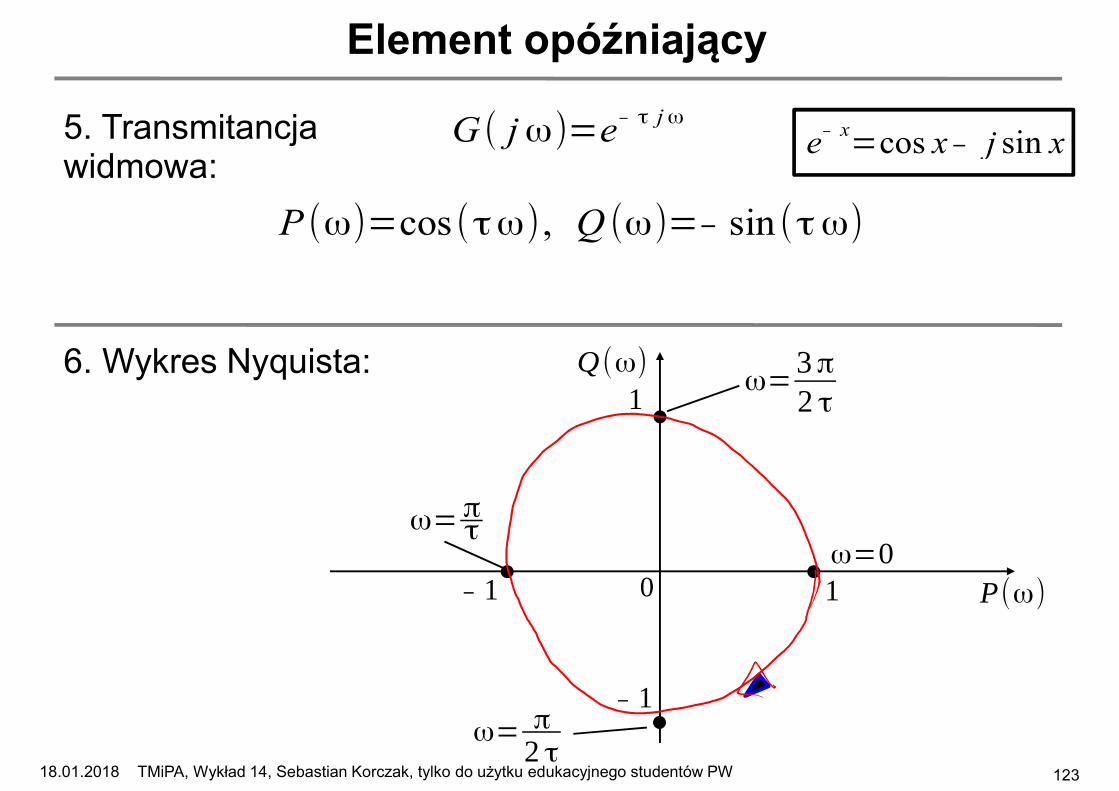
5. Transmitancja widmowa:
6. Wykres Nyquista:
P (ω)=cos(τω), Q (ω)= − sin (τω)
P(ω)
Q(ω)
ω=00
ω= π2 τ
ω=πτ
ω=3π2 τ
1
1
− 1
− 1
G ( jω)=e − τ jω
e − x=cos x − j sin x

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 124
Element opóźniający
7. Wykres Bodego:
L(ω)=20 log A (ω)=20 log 1=0
φ (ω)=arctanQ
P=arctan ( − tan ( τω))= − τω
φ(ω
) [r
ad]
− π
πτ
ω [rad/s]
10πτ
L(ω
) [d
B]
ω [rad/s]
110T
1T
10T
0
A(ω)= √P2+Q
2=1

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 125
Element opóźniającyPrzykłady
1 TRANSMISJA BEZPRZEWODOWA:wejście – dane wysłanewyjście – dane odebranenadajnik odbiornik
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 126
Element inercyjny drugiego rzędu
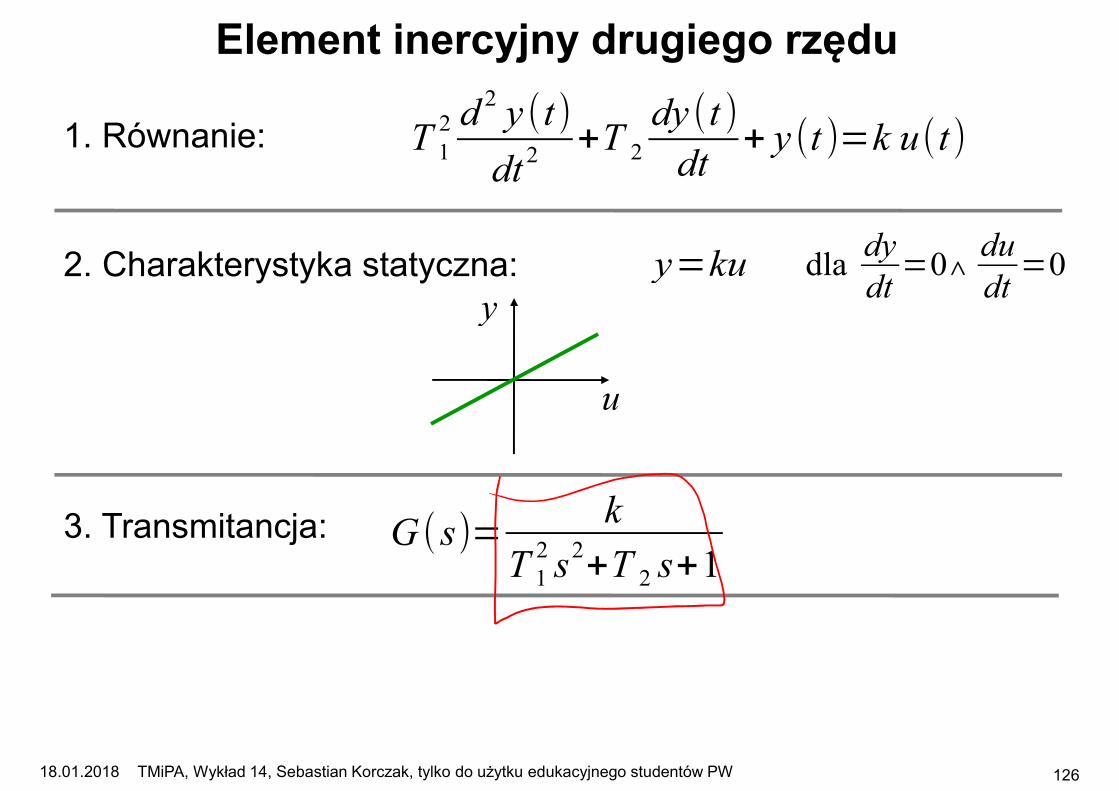
1. Równanie:
2. Charakterystyka statyczna: y=ku
3. Transmitancja: G(s)=k
T 12s
2+T 2 s+1
u
y
T 12 d
2y (t)
dt 2+T 2
dy (t )
dt+ y (t )=k u(t)
dla dydt
=0 ∧dudt
=0

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 127
Element inercyjny drugiego rzędu
4. Odp. skokowa:
Wejście: u (t )=u0 1(t)
Transformata Laplacea wejścia: U ( s)=u0
1
s
wyjście: y (t )=L− 1 {Y (s )}=
={k u0
T 1
2(1− e
− ht (cosω t+hω sinω t )), dla h≤ ω0
k u0
T 12 (1+e
− ht((h+w
2 w− 1)e− wt
−h+w
2 we
wt)), dla h≥ ω0
gdzie: h=T 2
2T 12
, ω0=1
T 1
, ω= √ω0
2 − h2 , w= √h2 − ω0
2
Transformata Laplacea wyjścia: Y ( s)=G (s)U (s)=k u0
s(T 12 s2+T 2 s+1)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 128
Element inercyjny drugiego rzędu
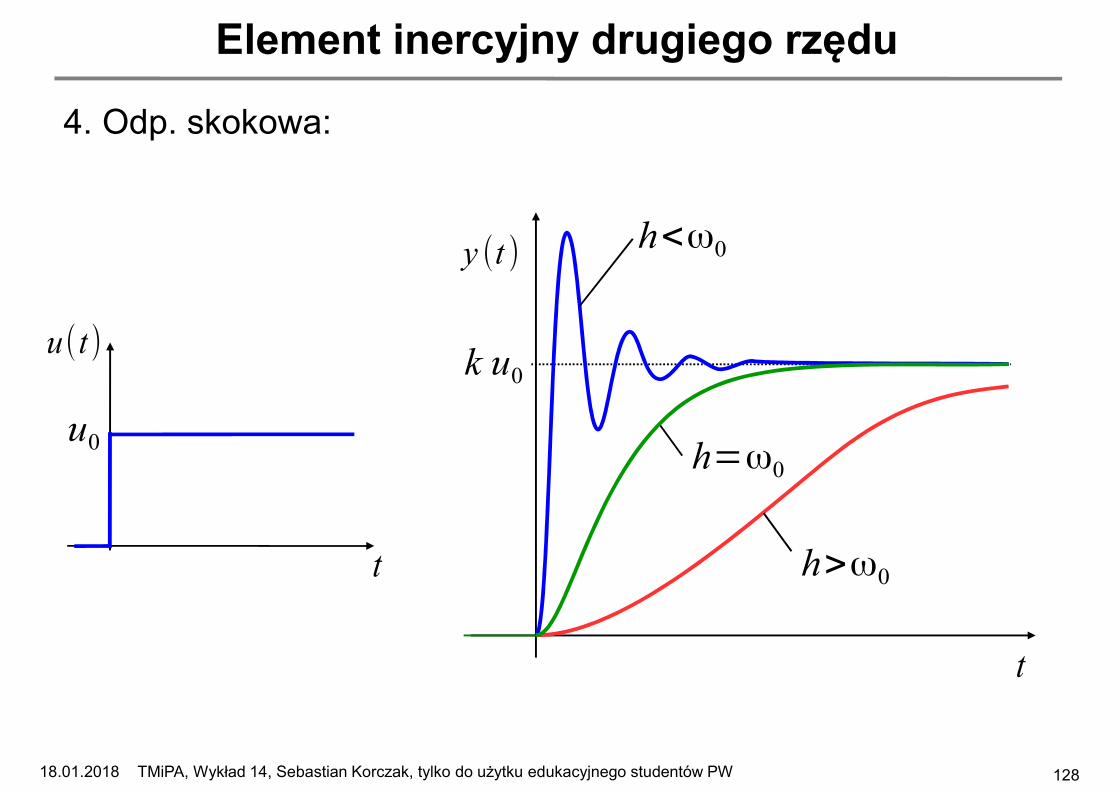
4. Odp. skokowa:
u0
u(t)
t
k u0
y (t )
t
h<ω0
h=ω0
h>ω0
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 129
Element inercyjny drugiego rzędu
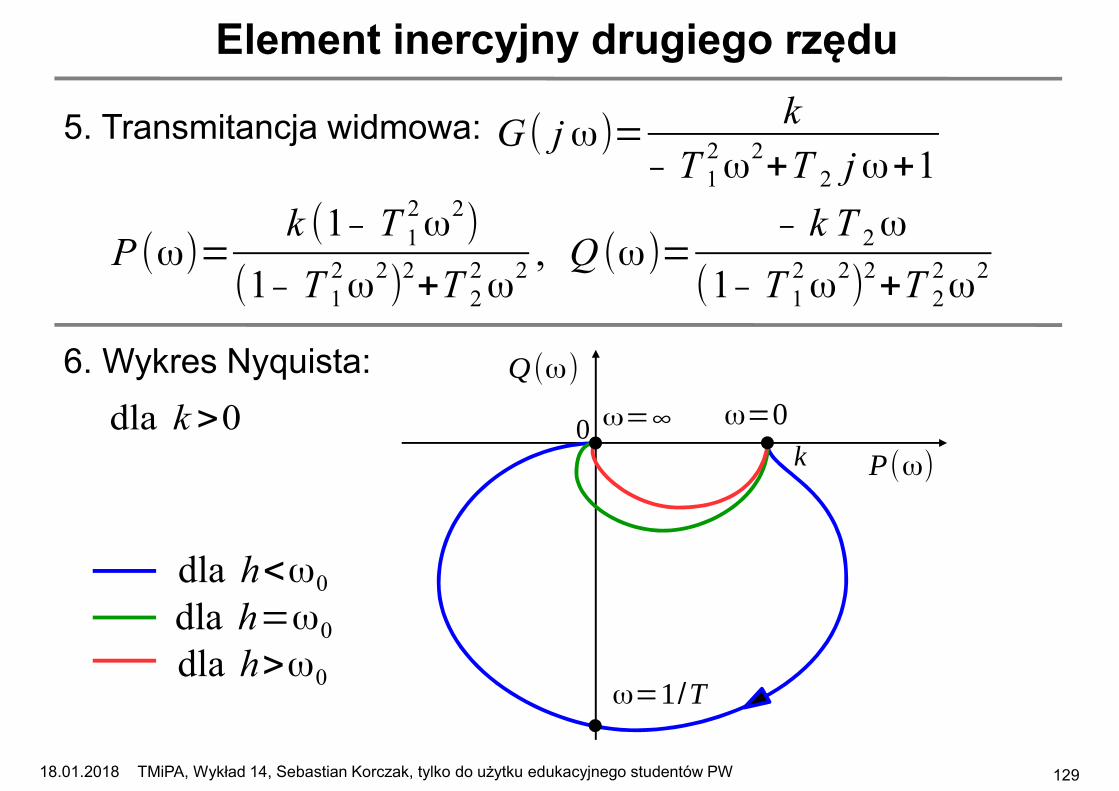
6. Wykres Nyquista:
P (ω)=k (1 − T 1
2ω
2)
(1 − T 12ω2)2+T 2
2ω2, Q (ω)=
− k T 2ω
(1 − T 12ω2)2+T 2
2ω2
P(ω)
Q(ω)
ω=0ω= ∞
k0
ω=1/T
dla k>0
dla h<ω0
dla h=ω0
dla h>ω0
5. Transmitancja widmowa: G( jω)=k
− T 12ω
2+T 2 jω+1
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 130
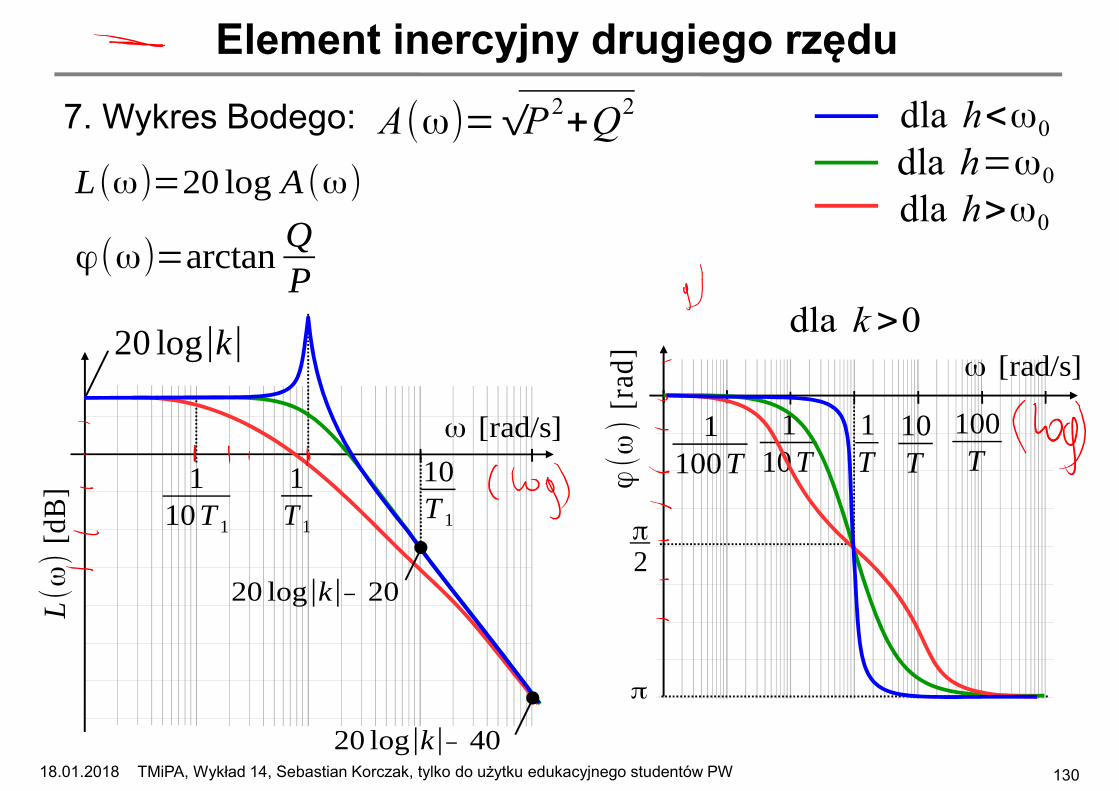
Element inercyjny drugiego rzędu
7. Wykres Bodego:
L(ω)=20 log A (ω)
A(ω)= √P2+Q
2
φ (ω)=arctanQ
P
L(ω
) [d
B]
ω [rad/s]
110T 1
1T 1
20 log|k| − 20
20 log|k|
20 log|k| − 40
dla k>0
10T 1
φ(ω
) [r
ad]
π
π2
1T
10T
ω [rad/s]
100T
110T
1100T
dla h<ω0
dla h=ω0
dla h>ω0

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 131
Element inercyjny drugiego rzęduPrzykłady
punkt materialnyo masie m
liniowa sprężyna o sztywności k
liniowy tłumik o współczynniku c
1 UKŁAD DRGAJĄCY:wejście – siła F(t)wyjście – przemieszczenie y(t)
y(t)
F(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 132
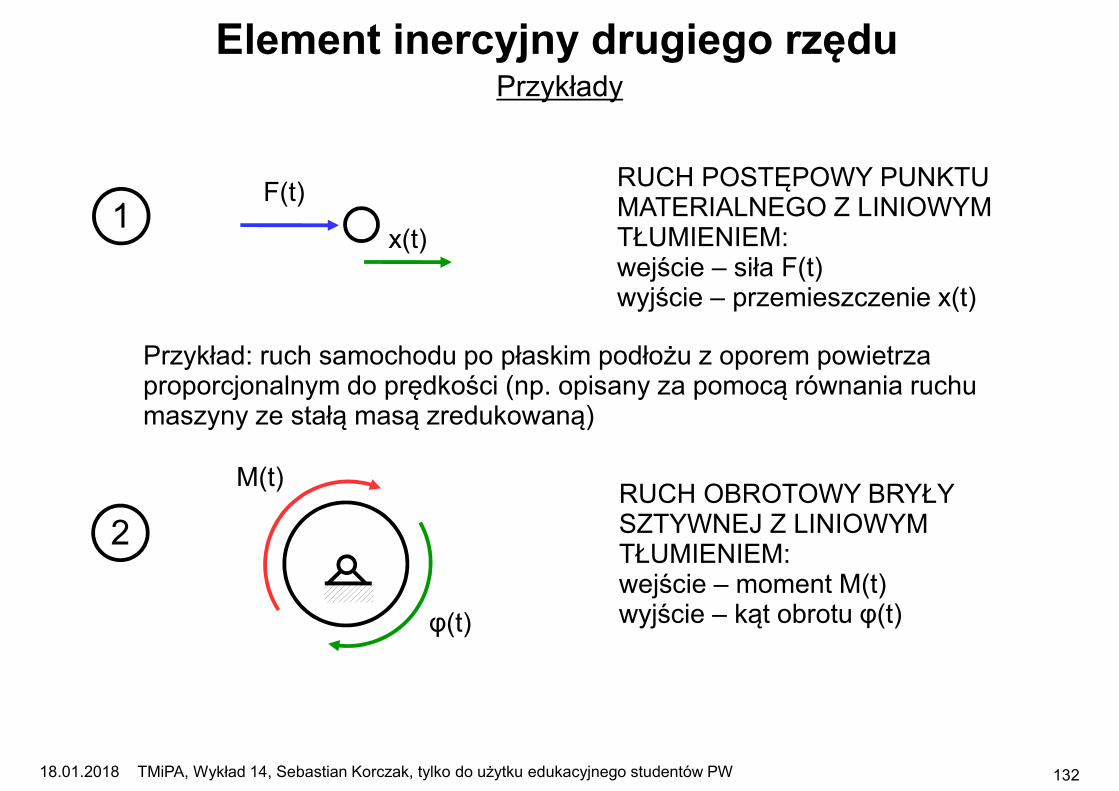
Element inercyjny drugiego rzęduPrzykłady
1RUCH POSTĘPOWY PUNKTU MATERIALNEGO Z LINIOWYM TŁUMIENIEM:wejście – siła F(t)wyjście – przemieszczenie x(t)
F(t)
x(t)
Przykład: ruch samochodu po płaskim podłożu z oporem powietrza proporcjonalnym do prędkości (np. opisany za pomocą równania ruchu maszyny ze stałą masą zredukowaną)
2RUCH OBROTOWY BRYŁY SZTYWNEJ Z LINIOWYM TŁUMIENIEM:wejście – moment M(t)wyjście – kąt obrotu φ(t)
M(t)
φ(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 133
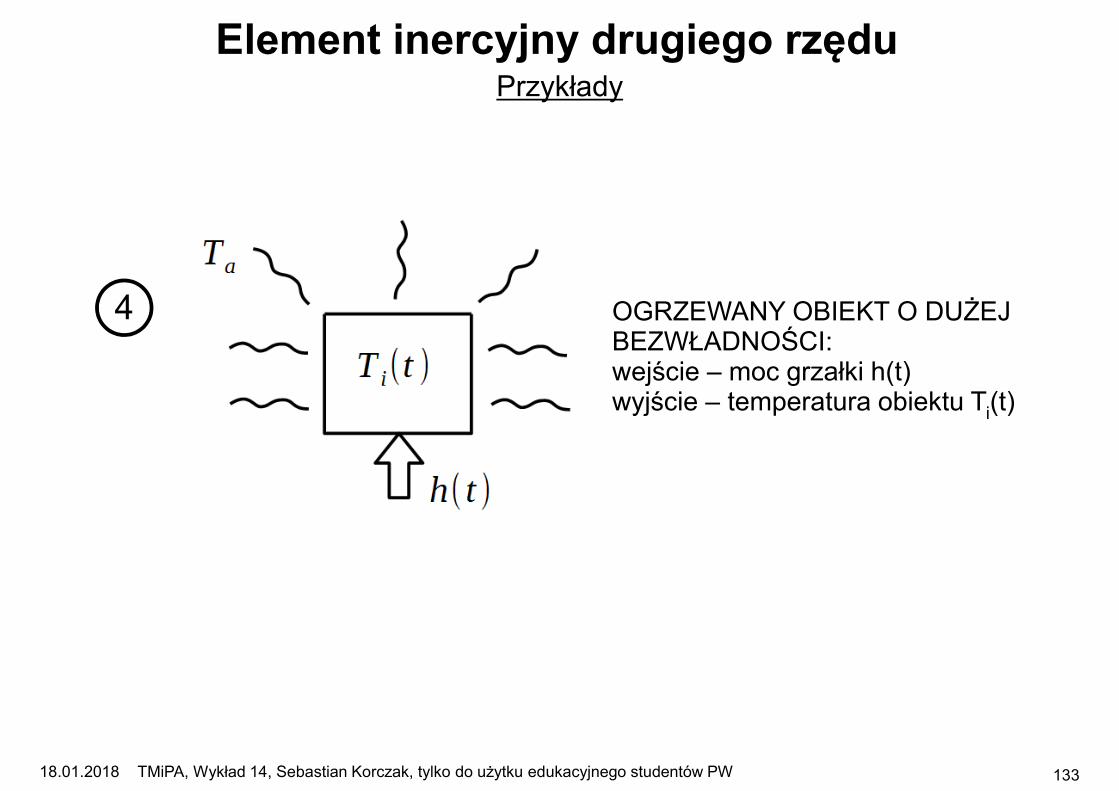
Element inercyjny drugiego rzęduPrzykłady
4 OGRZEWANY OBIEKT O DUŻEJ BEZWŁADNOŚCI:wejście – moc grzałki h(t)wyjście – temperatura obiektu Ti(t)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 134
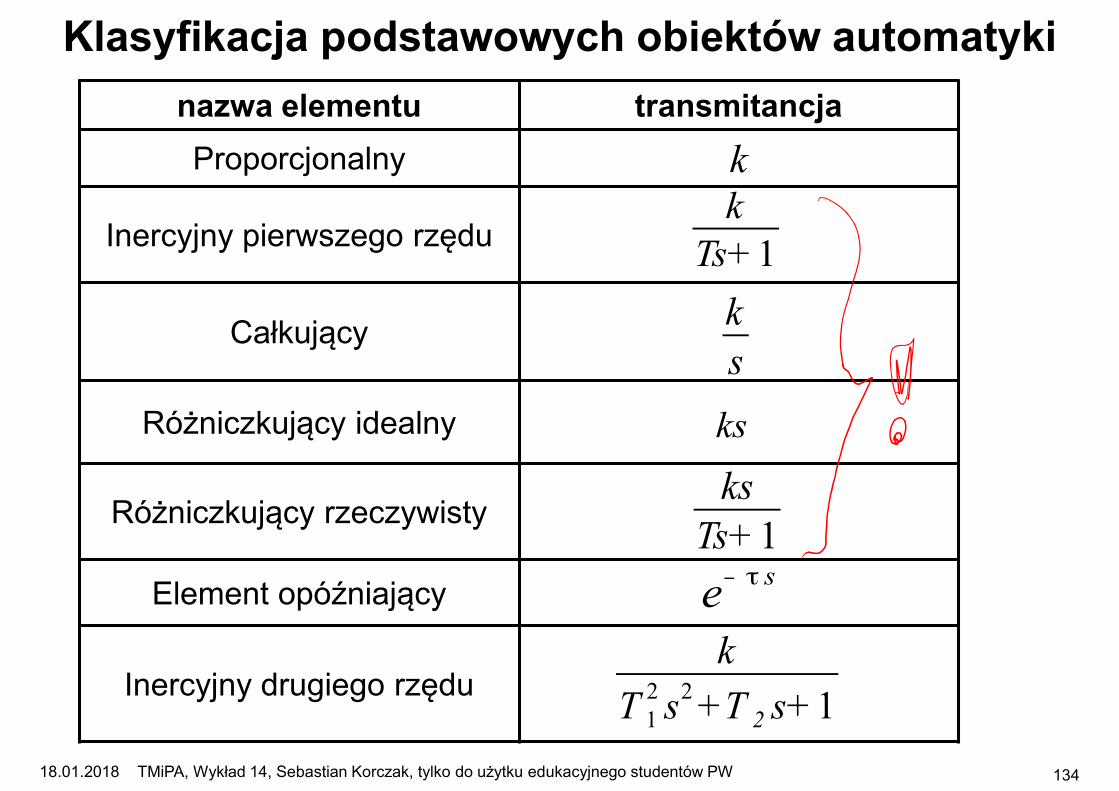
Klasyfikacja podstawowych obiektów automatyki
nazwa elementu transmitancja
Proporcjonalny k
Inercyjny pierwszego rzędu
Całkujący
Różniczkujący idealny
Różniczkujący rzeczywisty
Element opóźniający
Inercyjny drugiego rzędu
k
Ts+1
ks
ks
ks
Ts+1
e − τ s
k
T 12s
2+T 2 s+1
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 135
Wykład 11
Algebra schematów blokowych.Regulatory automatyczne i sterowanie.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 136
Algebra schematów blokowychtransmitancja
X(s) Y(s)G(s)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 137
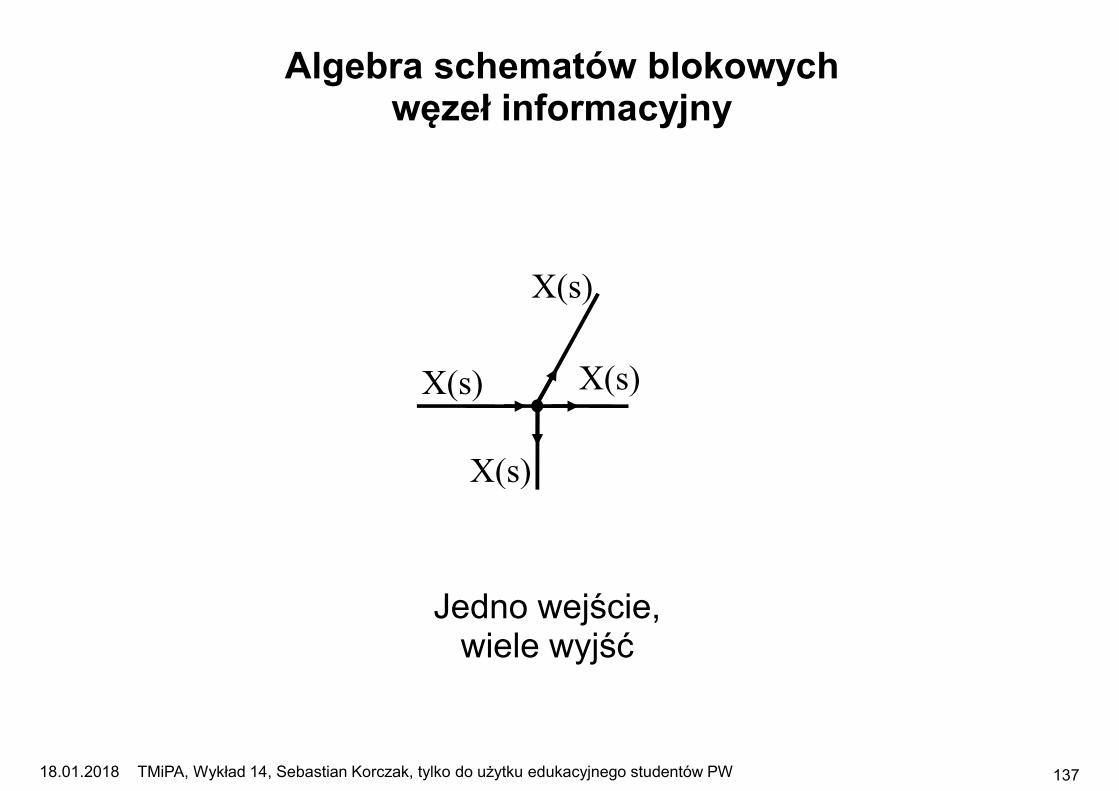
Algebra schematów blokowychwęzeł informacyjny
X(s)
X(s) X(s)
X(s)
Jedno wejście, wiele wyjść
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 138
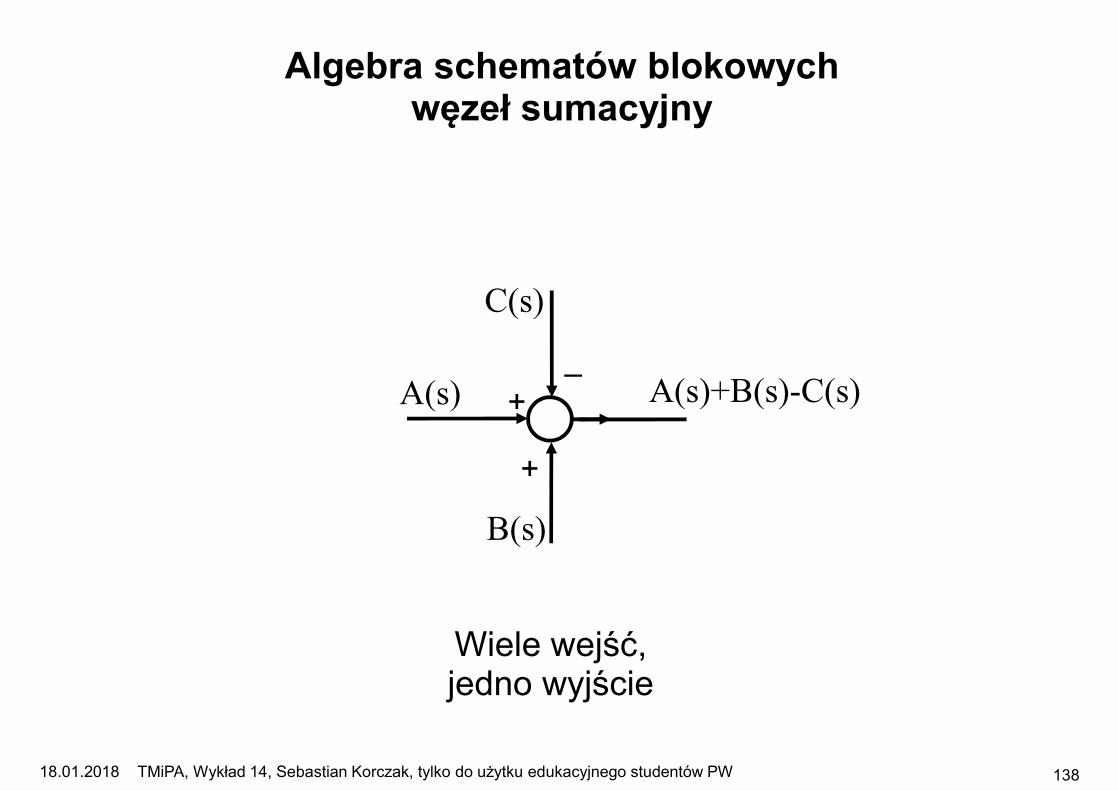
Algebra schematów blokowychwęzeł sumacyjny
A(s) +
B(s)
+
A(s)+B(s)-C(s)–
C(s)
Wiele wejść, jedno wyjście

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 139
Algebra schematów blokowychpołączenie szeregowe
G1(s)x(s) y(s) x(s) y(s)
GR(s)G2(s)
GR(s)=G1(s) G2(s)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 140
Algebra schematów blokowychpołączenie równoległe
G1(s)x(s) y(s) x(s) y(s)
GR(s)
G2(s)GR(s)= - G1(s) + G2(s) + G3(s)
-
+
G3(s)
+
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 141
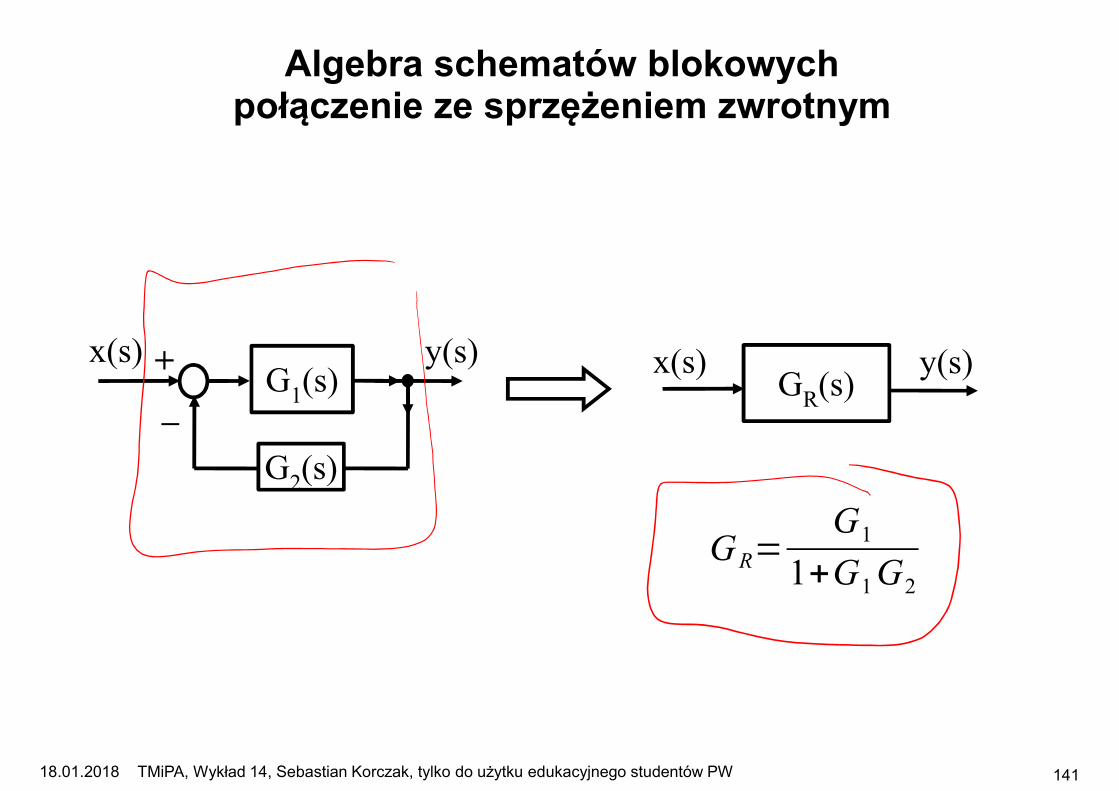
Algebra schematów blokowychpołączenie ze sprzężeniem zwrotnym
G2(s)
+
–
x(s) y(s) x(s) y(s)GR(s)G1(s)
GR=G1
1+G1 G2
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 142
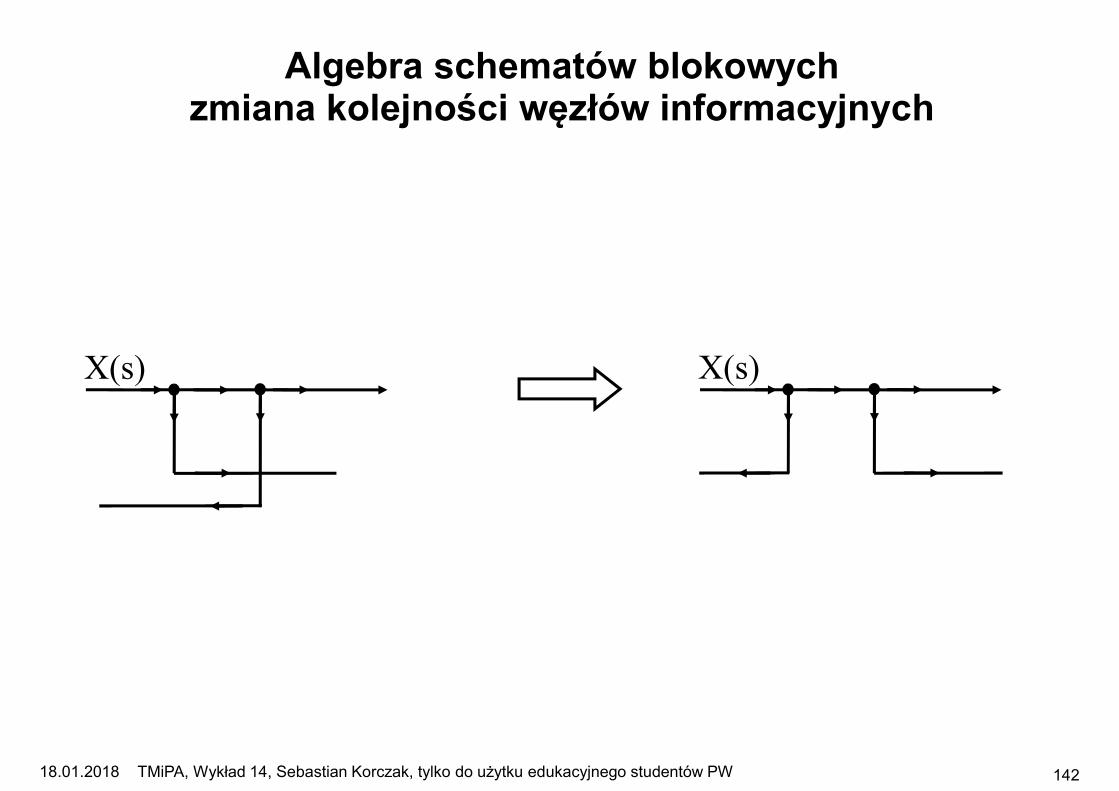
Algebra schematów blokowychzmiana kolejności węzłów informacyjnych
X(s) X(s)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 143
G(s)+
+
X(s) Y(s)
A(s)
G(s)
G(s)+
+
X(s) Y(s)
A(s)
Algebra schematów blokowychprzeniesienie węzła sumacyjnego za blok transmitancji
Y=(X+A)G Y=XG+AG
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 144
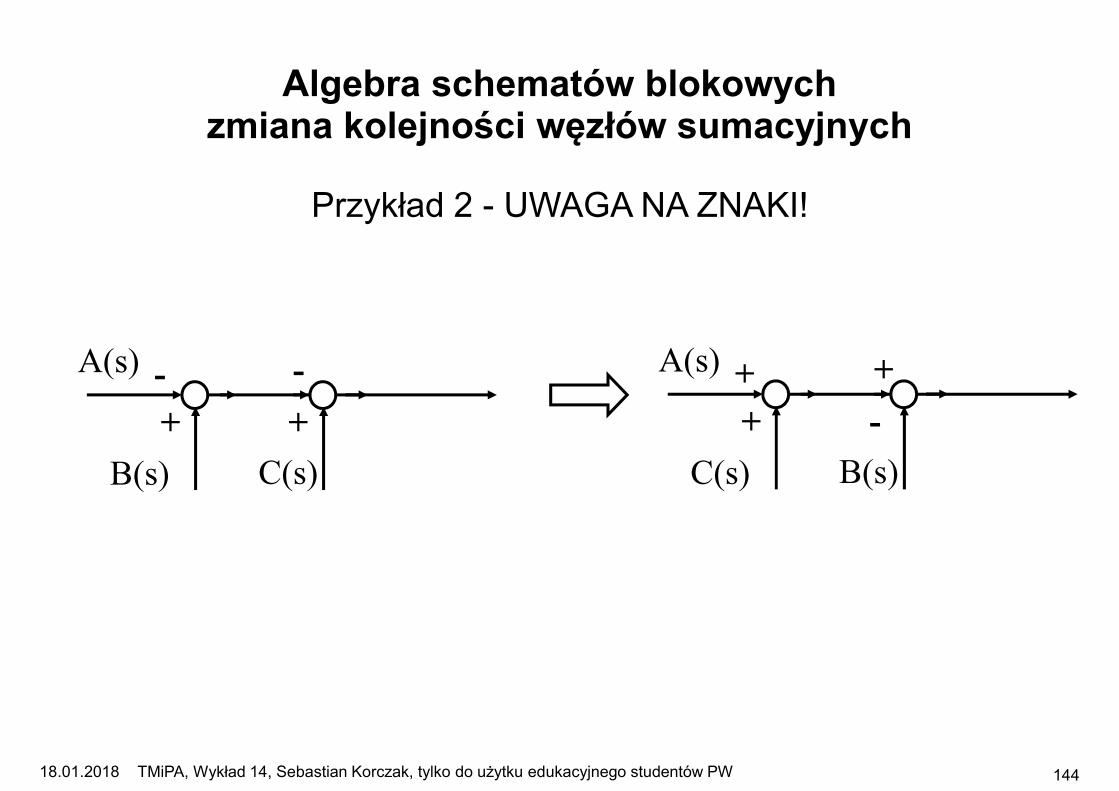
-
+
A(s)
C(s)B(s)
+
-
Algebra schematów blokowychzmiana kolejności węzłów sumacyjnych
+
+
A(s)
B(s)C(s)
-
+
Przykład 2 - UWAGA NA ZNAKI!
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 145
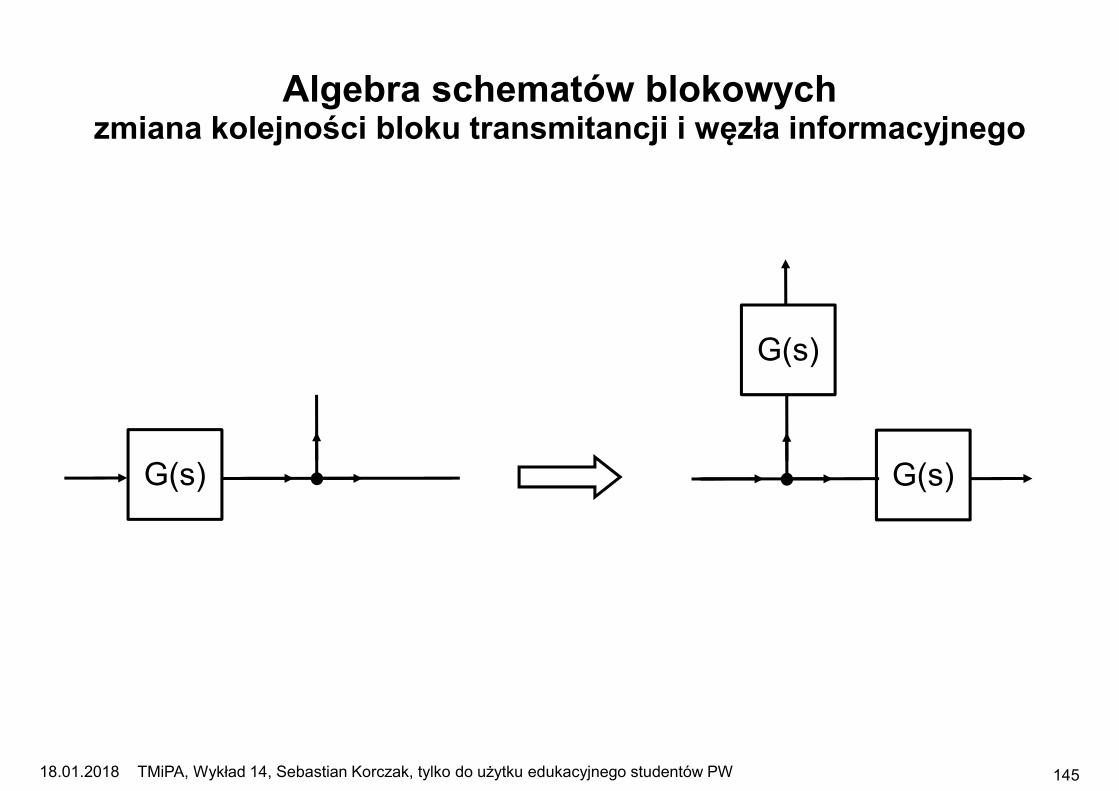
G(s) G(s)
G(s)
Algebra schematów blokowychzmiana kolejności bloku transmitancji i węzła informacyjnego

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 146
Regulatory automatyczne i sterowanie
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 147
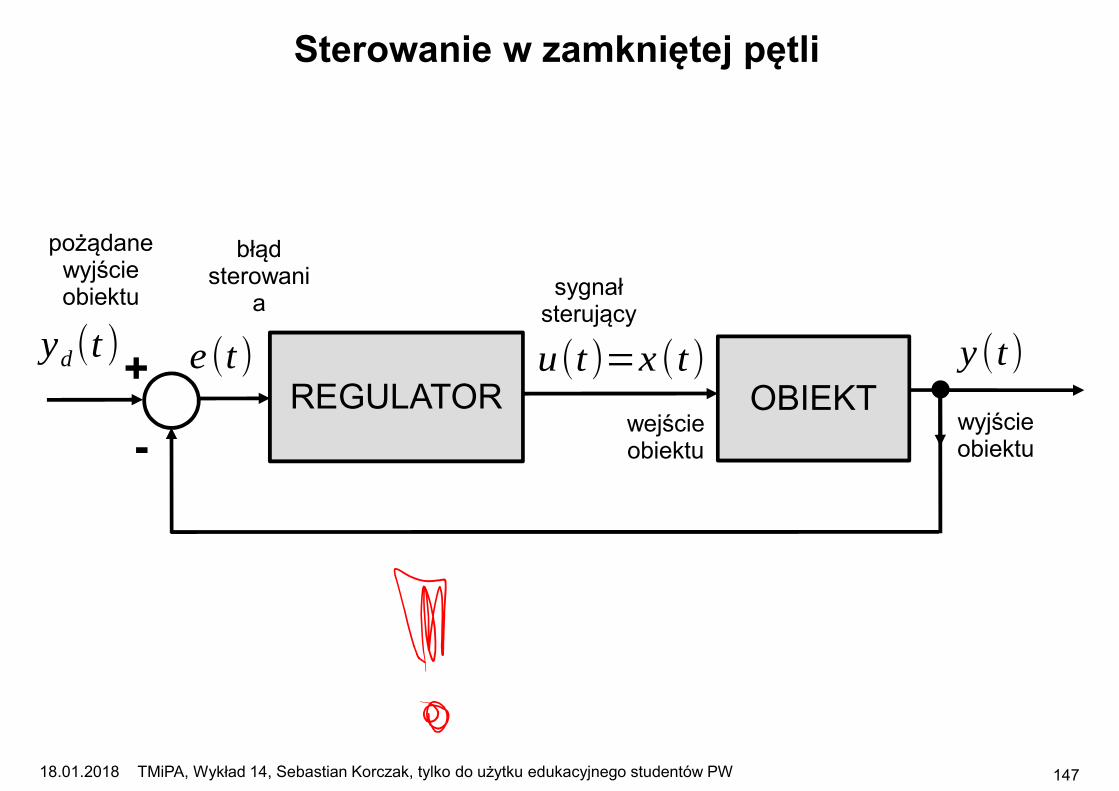
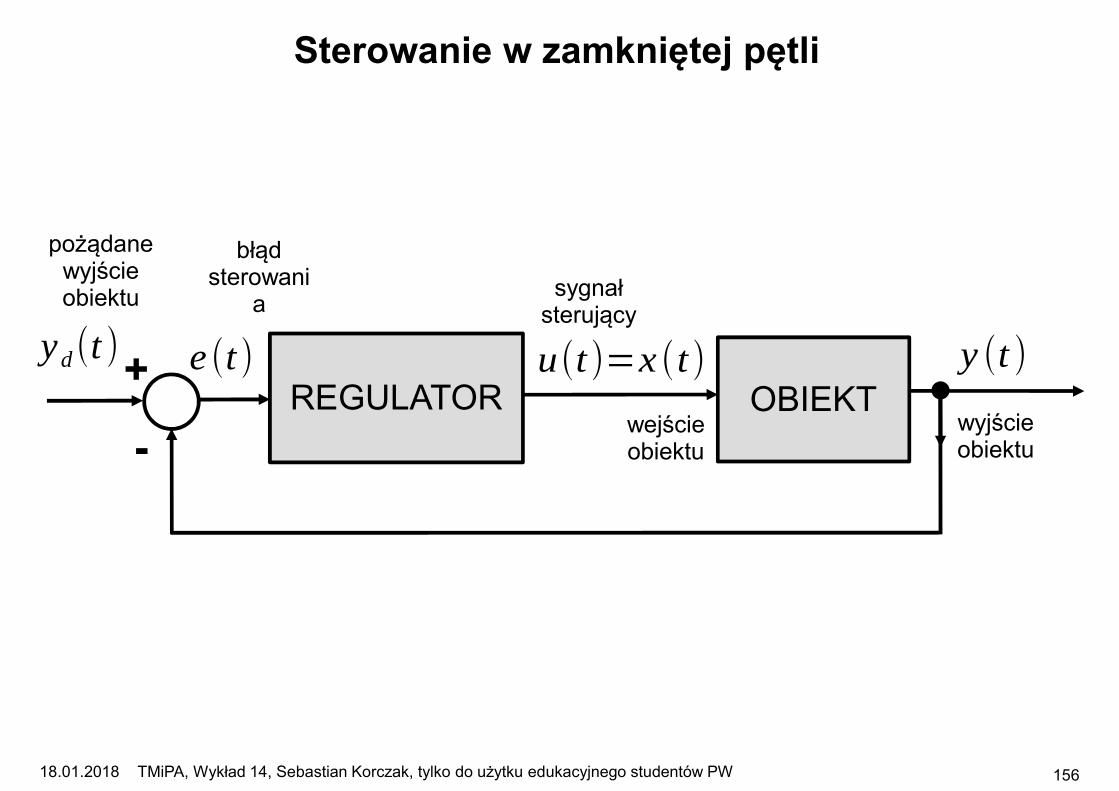
Sterowanie w zamkniętej pętli
OBIEKTu(t)=x (t) y (t)
REGULATOR
yd(t )
pożądane wyjście obiektu sygnał
sterujący
wyjście obiektu
wejście obiektu
+
-
e (t )
błąd sterowani
a
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 148
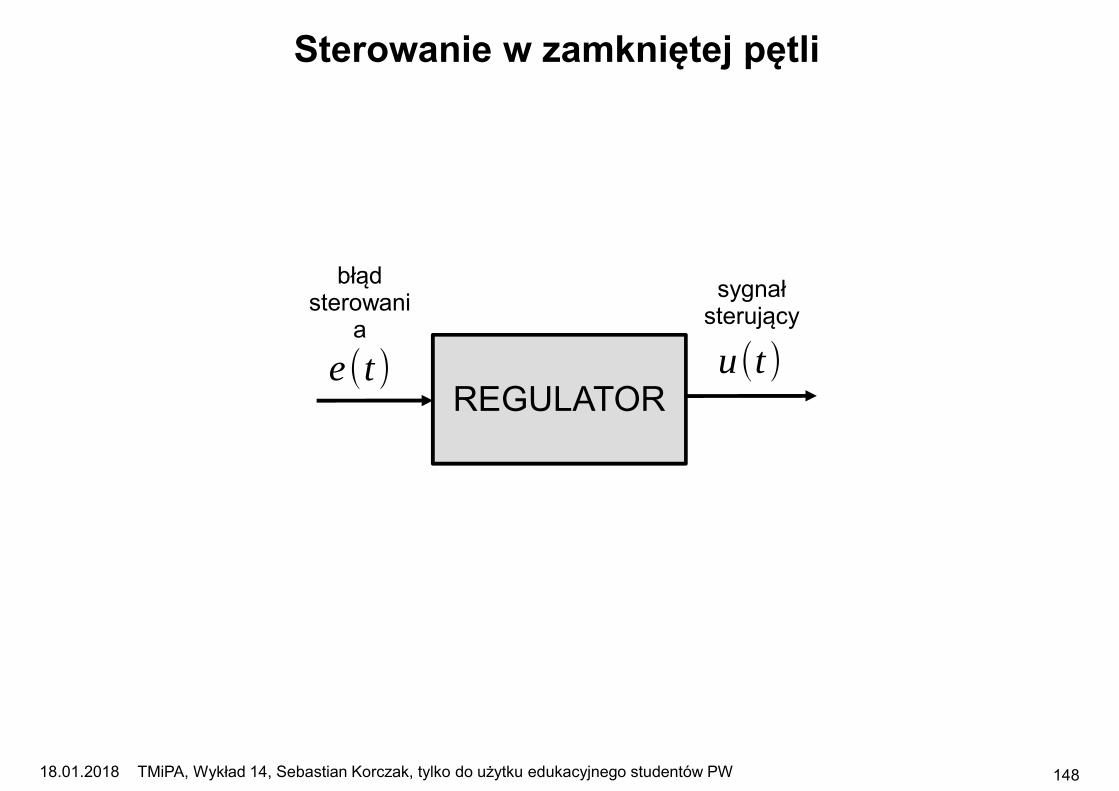
Sterowanie w zamkniętej pętli
u(t)REGULATOR
sygnał sterujący
e(t)
błąd sterowani
a
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 149
Podstawowe regulatory
dwustanowy
trójstanowy
Proporcjonalny (P)
Całkujący (I)
Różniczkujący (D)
Proporcjonalno-całkująco-różniczkujący (PID)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 150
Regulator dwustanowy
u(t)
sygnał sterujący
e(t)
błąd sterowani
a
u(t)
e(t)
u(t)={umax , jeżeli e>e0
umin , jeżeli e< − e0
bez zmian, w pozostałych przypadkach}
umax
umin
e0 − e0
eo - histereza konstrukcyjna lub programowalna
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 151
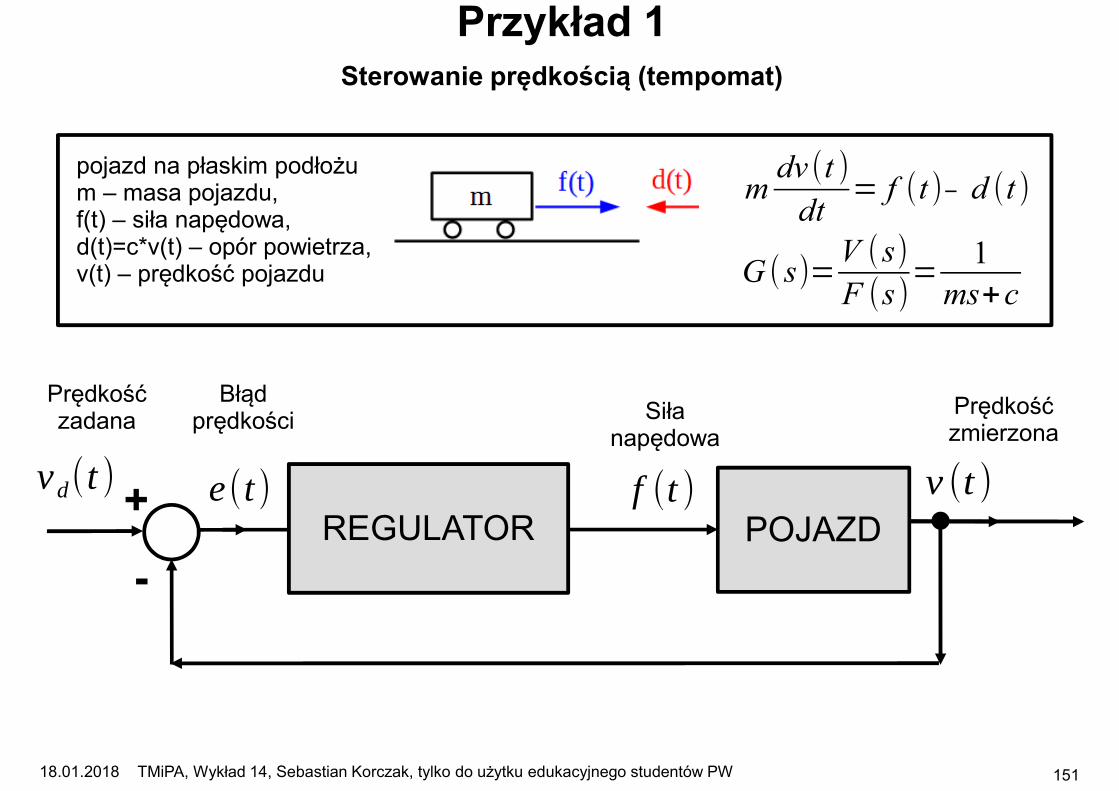
Przykład 1
mdv (t )
dt= f (t ) − d (t )
G (s)=V (s)
F (s)=
1
ms+c
POJAZDf (t ) v (t )
REGULATOR
vd(t )
Prędkość zadana
+
-
e(t)
Prędkość zmierzona
Siła napędowa
Sterowanie prędkością (tempomat)
pojazd na płaskim podłożum – masa pojazdu,f(t) – siła napędowa,d(t)=c*v(t) – opór powietrza,v(t) – prędkość pojazdu
Błąd prędkości
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 152
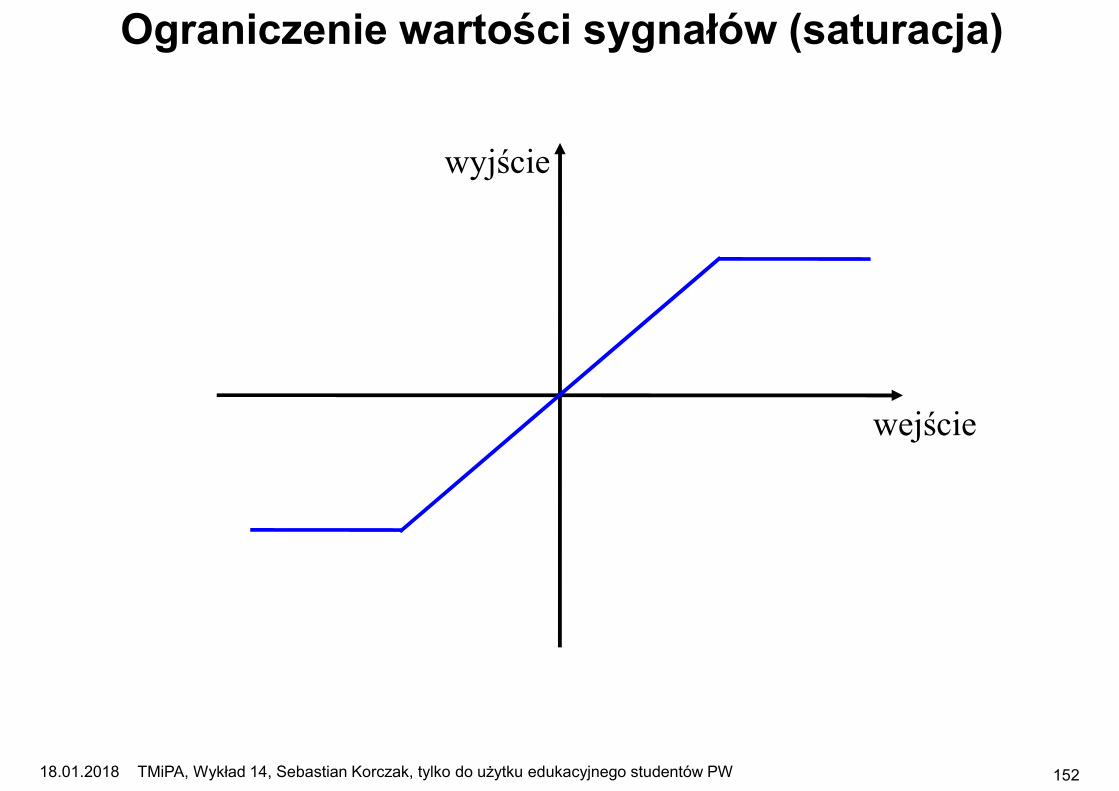
Ograniczenie wartości sygnałów (saturacja)
wejście
wyjście
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 153
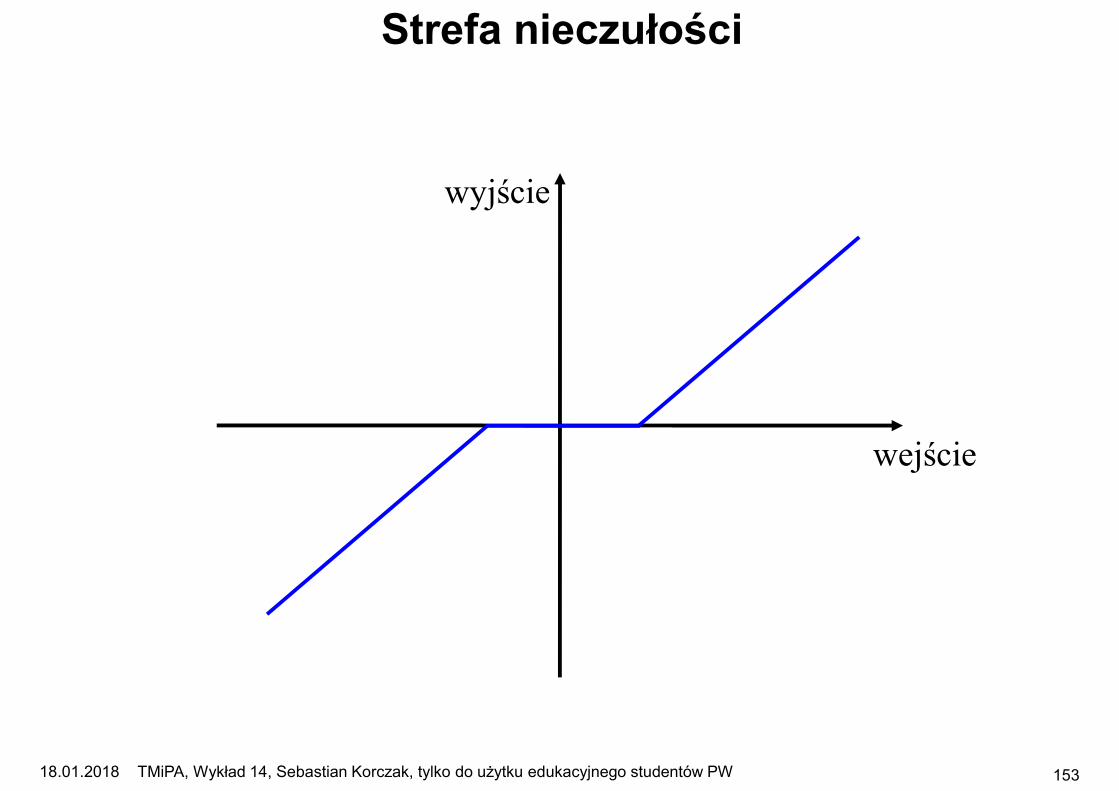
wejście
wyjście
Strefa nieczułości
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 154
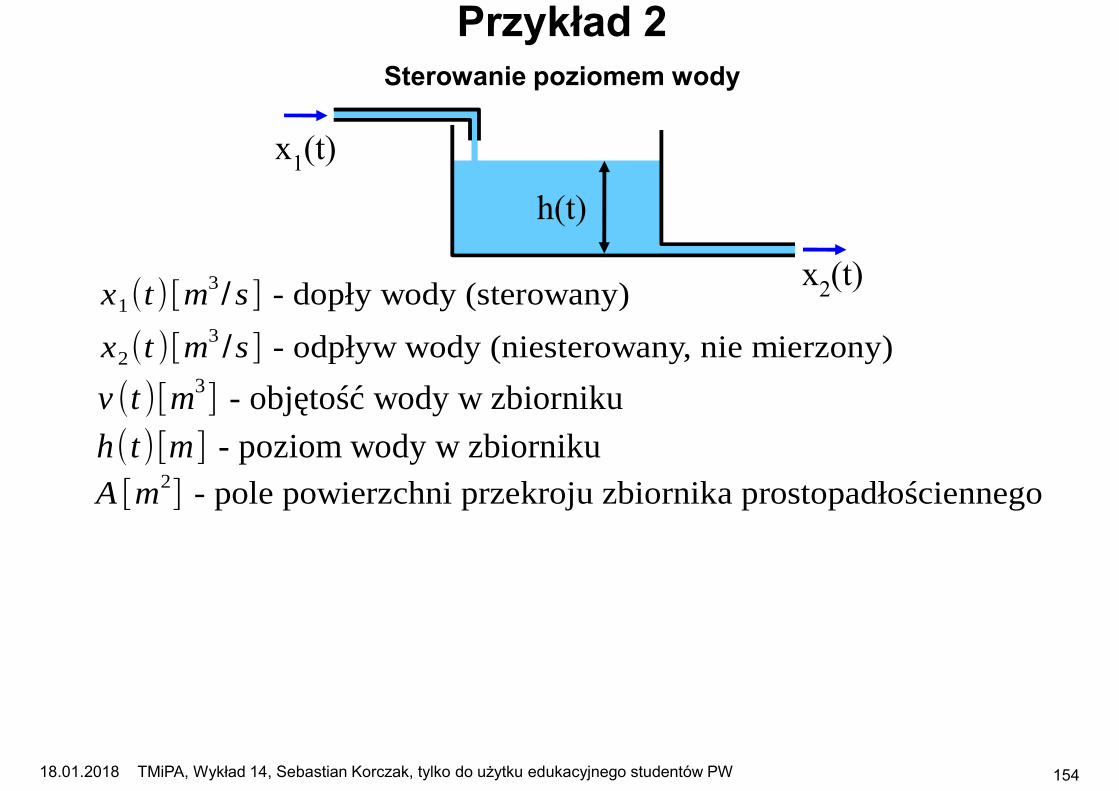
Przykład 2Sterowanie poziomem wody
x1(t)[m3/ s ] - dopły wody (sterowany)
x2(t )[m3 /s ] - odpływ wody (niesterowany, nie mierzony)
h(t)[m ] - poziom wody w zbiorniku
A [m2] - pole powierzchni przekroju zbiornika prostopadłościennego
h(t)
x2(t)
x1(t)
v (t )[m3] - objętość wody w zbiorniku
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 155
Wykład 12
Regulator PID.Stabilność.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 156
Sterowanie w zamkniętej pętli
OBIEKTu(t)=x (t) y (t )
REGULATOR
yd(t )
pożądane wyjście obiektu sygnał
sterujący
wyjście obiektu
wejście obiektu
+
-
e (t )
błąd sterowani
a
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 157
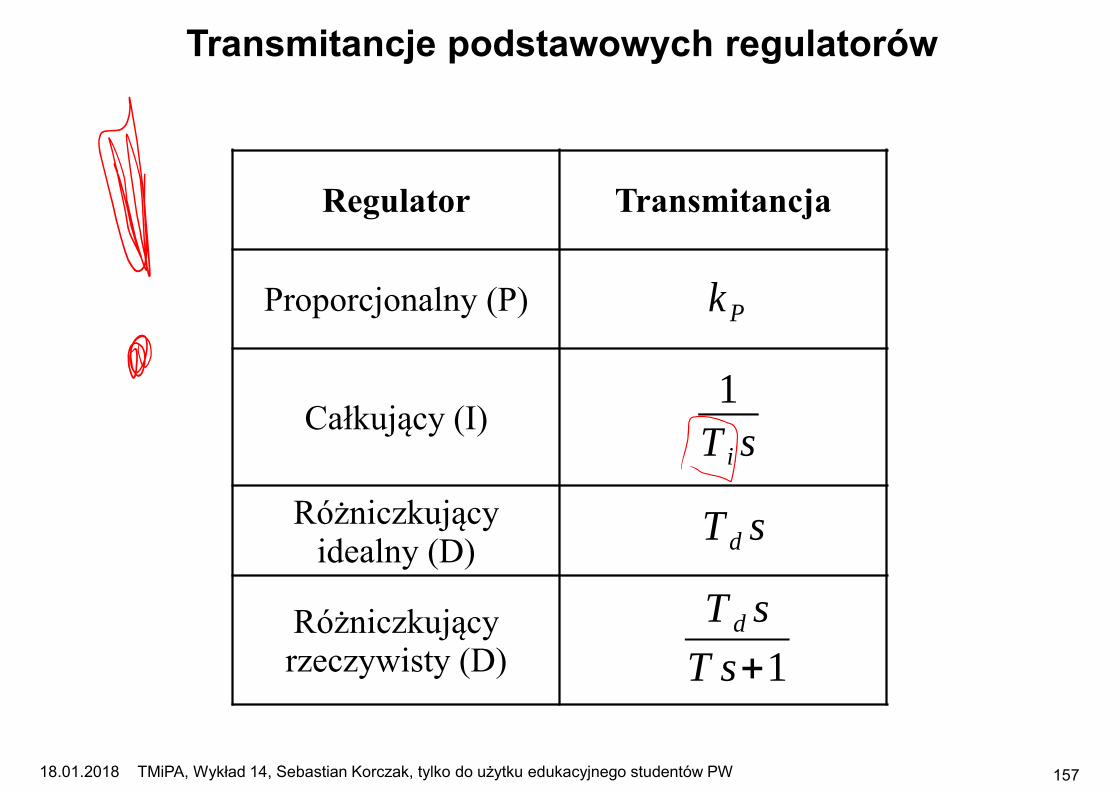
Transmitancje podstawowych regulatorów
kP
1
Ti s
Td s
T d s
T s+1
Regulator Transmitancja
Proporcjonalny (P)
Całkujący (I)
Różniczkujący idealny (D)
Różniczkujący rzeczywisty (D)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 158
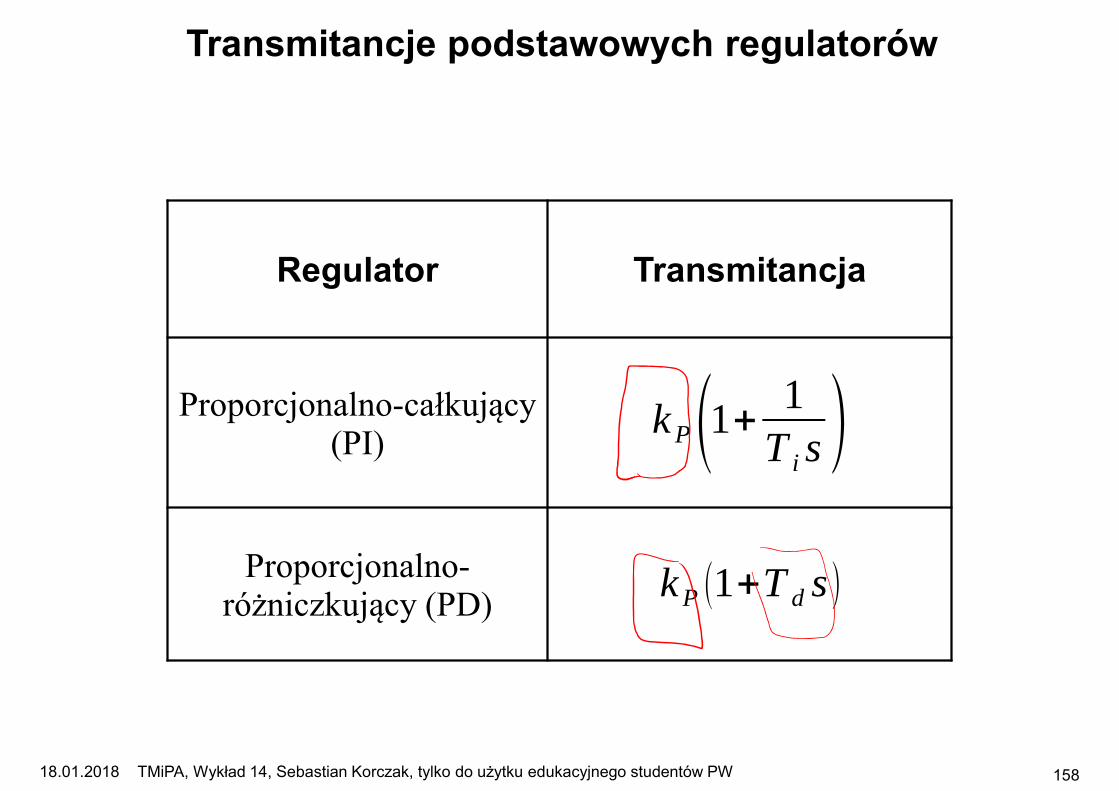
Transmitancje podstawowych regulatorów
kP(1+ 1
Ti s )
kP (1+Td s )
Regulator Transmitancja
Proporcjonalno-całkujący (PI)
Proporcjonalno-różniczkujący (PD)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 159
Transmitancje podstawowych regulatorów
kP(1+ 1
Ti s+Td s)
kP+ki
1
s+kd s
Regulator Transmitancja
Proporcjonalno-całkująco-różniczkujący (PID)
w postaci standardowejz różniczkowaniem idealnym
Proporcjonalno-całkująco-różniczkujący (PID)
w postaci równoległejz różniczkowaniem idealnym

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 160
Transmitancje podstawowych regulatorów
kP(1+ 1
Ti s+
Td s
Ts+1)
kP+ki
1
s+kd
s
Ts+1
Regulator Transmitancja
Proporcjonalno-całkująco-różniczkujący (PID)
w postaci standardowejz różniczkowaniem
rzeczywistym
Proporcjonalno-całkująco-różniczkujący (PID)
w postaci równoległejz różniczkowaniem
rzeczywistym

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 161
Regulator PIDpostać standardowa
z różniczkowaniem idealnym
1
+
+
1
Ti skP
T d s
+

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 162
Regulator PIDpostać równoległa
z różniczkowaniem idealnym
+
+
ki
1
s
kP
kd s
+
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 163
Regulatory - odpowiedzi na wymuszenia skokowe
u(t)REGULATOR
sygnał sterujący
e(t)
błąd sterowani
a
?

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 164
Regulator proporcjonalny (P)
G(s)=K p
K p x0
x0
wejście
wyjście
czas

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 165
Regulator całkujący (I)
Ti
G(s)=1
Ti s
x0
czas
wejście
wyjście

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 166
Regulator proporcjonalno-całkujący (PI)
czasTi
G(s)=Kp(1+1
Ti s)
K p x0
x0
2 K p x0
wejście
wyjście

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 167
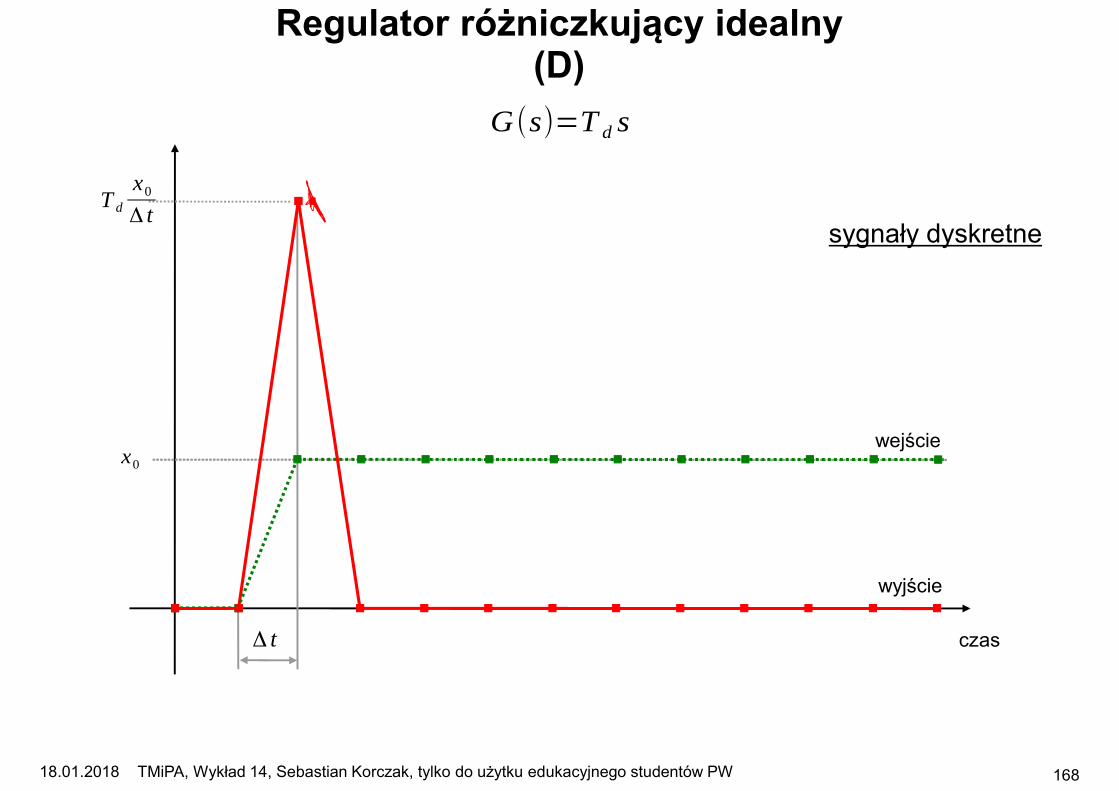
G(s)=T d s
+ ∞
x0
Regulator różniczkujący idealny (D)
czas
wejście
wyjście
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 168
G(s)=T d s
x0
Δ t
Regulator różniczkujący idealny (D)
czas
wejście
wyjście
sygnały dyskretne
Td
x0
Δ t

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 169
Regulator proporcjonalno-różniczkujący (PD)
czas
wejście
wyjście
G(s)=KP (1+T d s)+ ∞
x0
K p x0

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 170
Regulator różniczkujący rzeczywisty (D)
czas
wejście
wyjście
G(s)=Td s
T s+1
x0
T
umax=x0
Td
T
0,368umax
T T
0,135umax
0,05umax

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 171
Regulator proporcjonalno-różniczkujący rzeczywisty (PD)
czas
wejście
wyjście
G(s)=Kp(1+T d s
T s+1)
x0
K p x0
KP x0(1+Td
T )

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 172
Regulator PID w postaci standardowejz różniczkowaniem idealnym
czas
wejście
wyjście
G(s)=Kp(1+1
Ti s+T d s)
x0
K p x0
2 K p x0
Ti
+ ∞
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 173
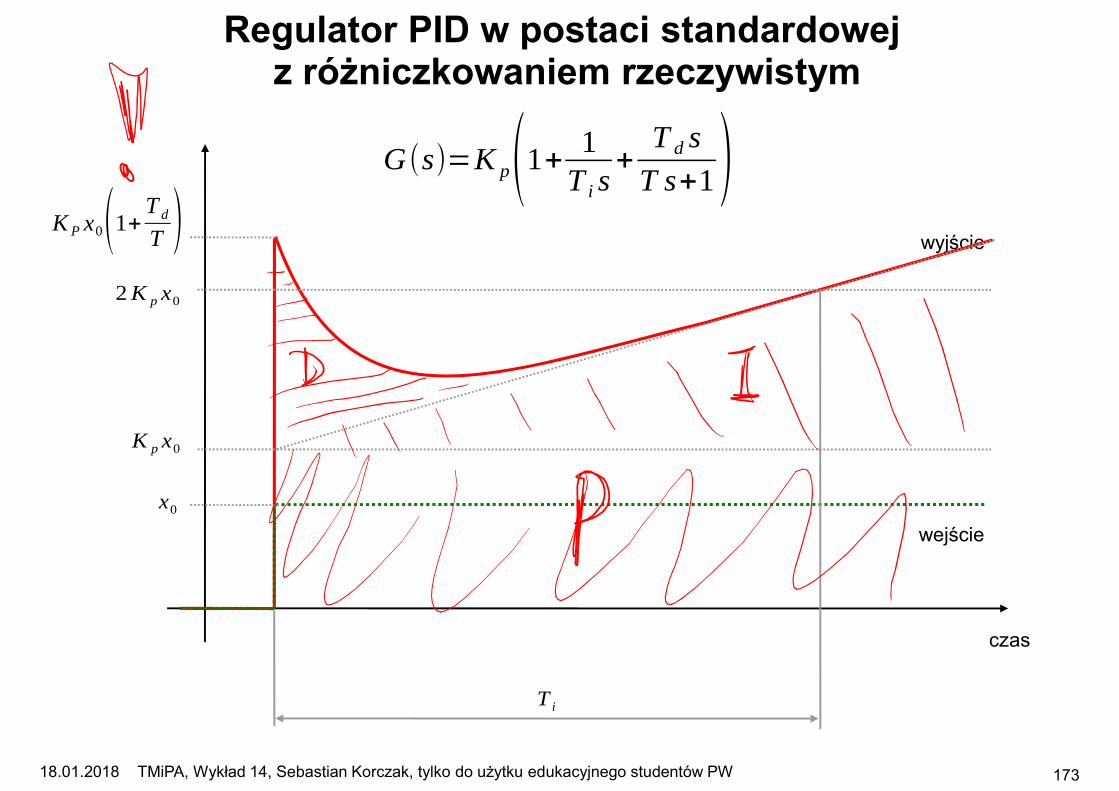
czas
wejście
wyjście
G(s)=K p(1+1
Ti s+
T d s
T s+1)
x0
K p x0
KP x0(1+Td
T )2 K p x0
Ti
Regulator PID w postaci standardowejz różniczkowaniem rzeczywistym

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 174
regulator PIDcharakterystyka działania
Czynnik proporcjonalny – zazwyczaj niezbędny do działania regulatora, gdyż powoduje generowanie sygnału sterującego zbliżającego wyjście układu do wartości zadanej; zwiększanie jego wartości zazwyczaj zmniejsza błędy sterowania; sygnał sterujący jest uzależniony tylko od aktualnej wartości błędu;
Czynnik całkujący – akumuluje błędy; niezerowy błąd powoduje wzrost sygnału sterującego, co zazwyczaj pomaga osiągnąć wartość zadaną; sygnał sterujący jest uzależniony od wcześniejszego przebiegu błędów; problem nasycenia całkowania; wygładza zakłócenia;
Czynnik różniczkujący – reaguje na zmiany wartości błędu; przy stałym błędzie generuje zerowy sygnał sterujący; sygnał sterujący wynika z trendu przyszłego błędu; czynnik bardzo podatny na zakłócenia;
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 175
regulator PIDproblem nasycenia całkowania (integral windup)
Po dużej zmianie wartości zadanej czynnik całkujący może wygenerować bardzo duży sygnał sterujący na skutek długiego akumulowania błędu. Sygnał ten może wręcz osiągnąć maksymalną dopuszczalną wartość. Sygnał sterujący będzie tak duży dopóki wartość zakumulowanego błędu nie zacznie spadać, a to ma miejsce dopiero po osiągnięciu przeciwnego znaku błędu. Działanie układu sterowania jest zatem przez długi czas zablokowane, co niekorzystnie wpływa na zachowanie układu.
Możliwe rozwiązanie problemu: wyłączanie i zerowanie zakumulowanego błędu, jeśli wartość błędu jest poza pewnym małym obszarem wokół zera.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 176
regulator PIDmetody doboru nastawów regulatora
Analityczna Symulacyjna Eksperymentalna
1: wyznaczyć transmitancję
zredukowaną układu sterowania
2: wyznaczyć odpowiedź na
wymuszenie skokowe3: dobrać parametry Kp,
Ki i Kd do uzyskania zadowalającego
kształtu odpowiedzi skokowej
(można badać również odpowiedzi na dowolne
wymuszenia lub charakterystyki Bodego)
1: wyznaczyć transmitancję
zredukowaną układu sterowania
2: dokonać symulacji działania układu dla
dowolnego interesującego nas
wymuszenia3: dobrać parametry Kp,
Ki i Kd do uzyskania zadowalającego
kształtu
Strojenie ręcznelub
metody: Zieglera-Nicholsa
Pessena Cohen’a-Coon’a
Åström’a–Hägglund’a

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 177
regulator PIDmetoda Zieglera-Nicholsa (PID w formie standardowej)
1. Ustawić regulator na działanie proporcjonalne o minimalnej wartościwzmocnienia.2. Obserwować odpowiedzi skokowe układu. Przejść do punktu 3 jeślizaobserwuje się niegasnące oscylacje wyjścia układu. Jeśli brak oscylacjilub zanikają, to należy podnieść nieznacznie współczynnik wzmocnienia ipowtórzyć punkt 2.3. Dla uzyskanego w punkcie 2 wzmocnienia krytycznego Kkryti zmierzonego okresu oscylacji Tkryt wyznaczyć nastawy według tabeli:
kp Ti Td
Klasyczna reguła Zieglera-Nicholsa
0,6 Ku 0,5 Tu 0,125 Tu
Wersja Pessen 0,7 Ku 0,4 Tu 0,15 Tu
Bez przeregulowania 0,2 Ku 0,5 Tu 0,333 Tu

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 178
regulator PID (równoległy)programowanie (pseudokod)
OBIEKTPID
wartość zadana
sterowanie wyjście
+
– pomiar
błąd
dt = 0.5p_błąd = 0.suma = 0.Kp = 1.Ki = 1.Kd = 1.start:
wartość_zadana = …wartość_zmierzona = …błąd = wartość_zadana – wartość_zmierzonasuma = suma + błąd * dtpochodna = (błąd – p_błąd) / dtwyjście = Kp* błąd + Ki*suma + Kd*pochodnap_błąd = błądwait(dt)goto start
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 179
regulator PIDsymulacja
regulator PID w sterowaniu ruchem samochodu
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 180
STABILNOŚĆ UKŁADÓW AUTOMATYKI

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 181
Ogólny warunek stabilności
Kryterium Hurwitz
Kryterium Nyquista
Kryteria stabilności
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 182
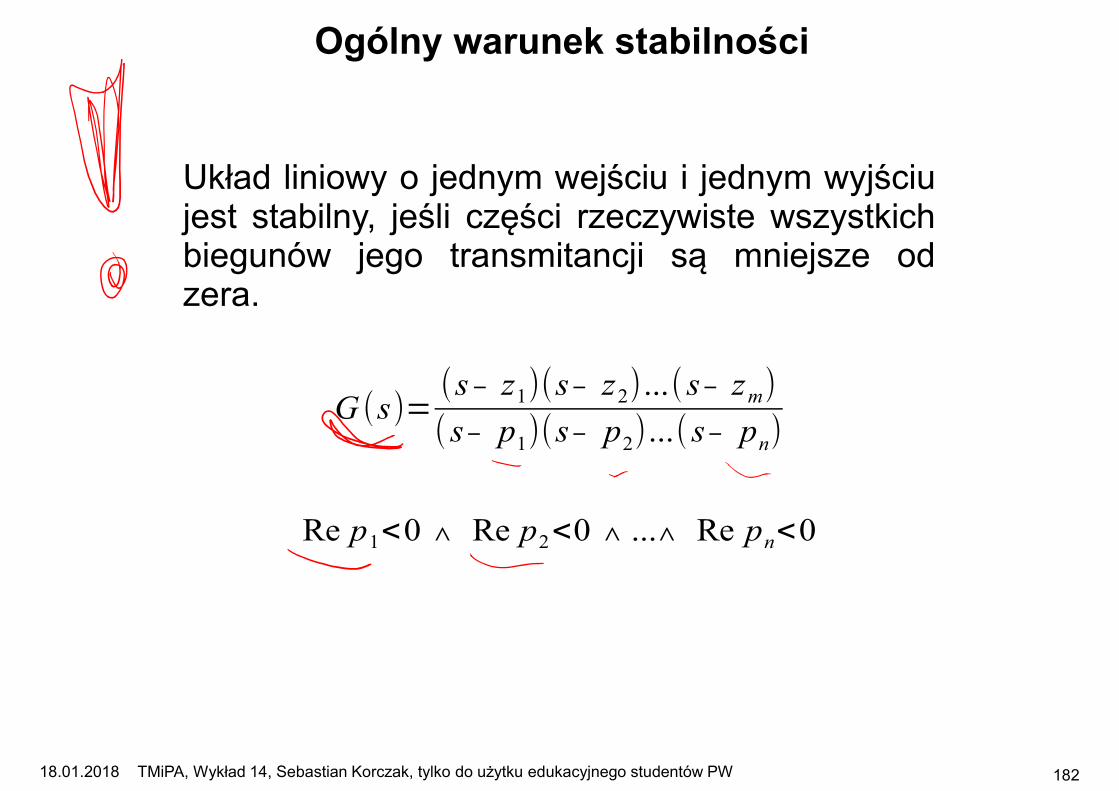
Ogólny warunek stabilności
Re p1<0 ∧ Re p2<0 ∧ ... ∧ Re pn<0
Układ liniowy o jednym wejściu i jednym wyjściujest stabilny, jeśli części rzeczywiste wszystkichbiegunów jego transmitancji są mniejsze odzera.
G (s)=(s − z1)(s − z2)...( s − zm)
( s − p1)(s − p2)...( s − pn)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 183
Wykład 13
Kryteria stabilności.Zapas modułu i zapas fazy.
Korekcja układów automatyki.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 184
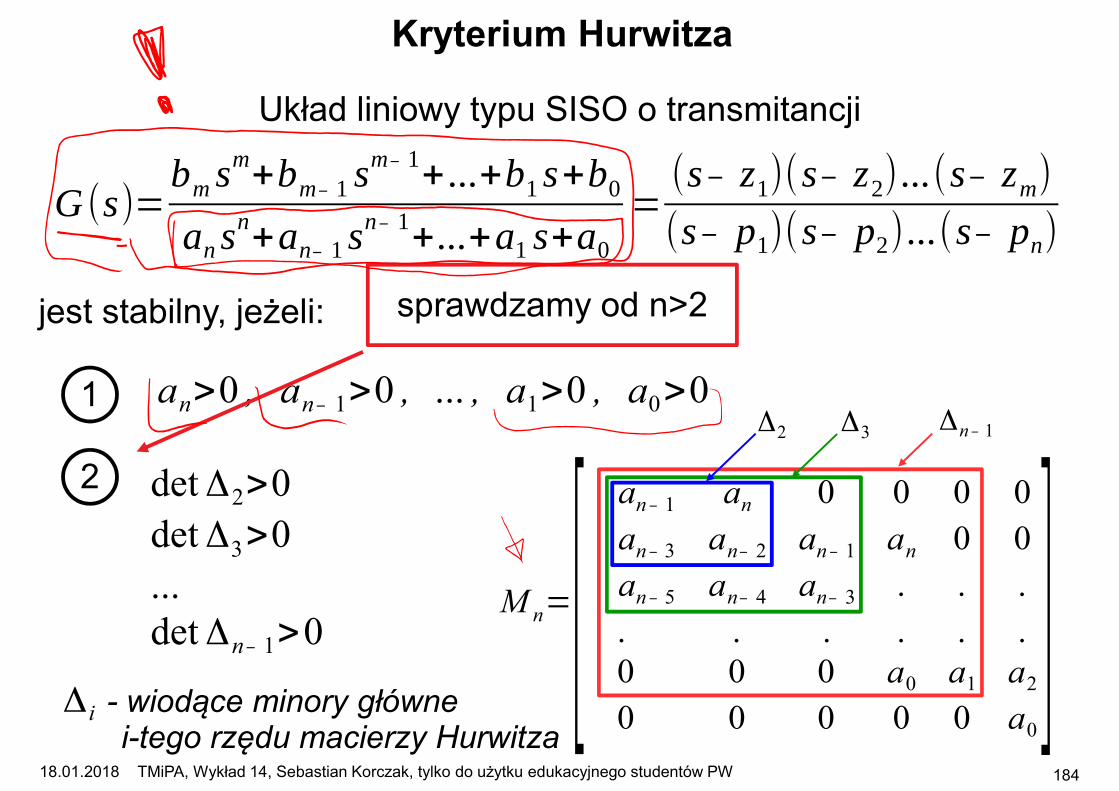
Kryterium Hurwitza
Układ liniowy typu SISO o transmitancji
an>0 , an − 1>0 , ... , a1>0 , a0>01
2
M n=[ an − 1 an 0 0 0 0
an − 3 an − 2 an − 1 an 0 0
an − 5 an − 4 an − 3 . . .
. . . . . . 0 0 0 a0 a1 a2
0 0 0 0 0 a0
]Δ2 Δ3 Δn − 1
detΔ2>0
detΔ3>0
...detΔn − 1>0
- wiodące minory głównei-tego rzędu macierzy Hurwitza
Δi
G (s)=bm s
m+bm − 1 s
m − 1+...+b1 s+b0
an sn+an − 1 s
n − 1+...+a1 s+a0
=(s − z1)(s − z2)...(s − zm)
(s − p1)(s − p2)...(s − pn)
jest stabilny, jeżeli: sprawdzamy od n>2

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 185
Kryterium Nyquista
G1(s)
G2(s)
+
–
G1 G2 = − 1Niestabilny,
gdy:ω=0
Re Gotw
Im G otw
ω → − ∞
ω → + ∞-1
Gz (s)=Y ( s)
X (s)=
G1(s)
1+G1(s)G2(s)
A(s)
X(s) Y(s)G1(s)
G2(s)
Gotw(s)=A(s)
X (s)=G1(s)G 2(s)
Y(s)X(s)
A(s)

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 186
Kryterium Nyquista (szczególne)
Układ zamknięty ze sprzężeniem zwrotnym jest stabilny, jeżeli:1) układ otwarty jest stabilny i
2) wykres Nyquista układu otwartego nie obejmuje punktu (-1,j0).// punkt (-1,j0) jest po lewej stronie idąc wzdłuż charakterystyki //
ReGotw
Im Gotw
ReGotw
Im Gotw
-1 -1
układ zamknięty
stabilny
układ zamknięty niestabilny
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 187
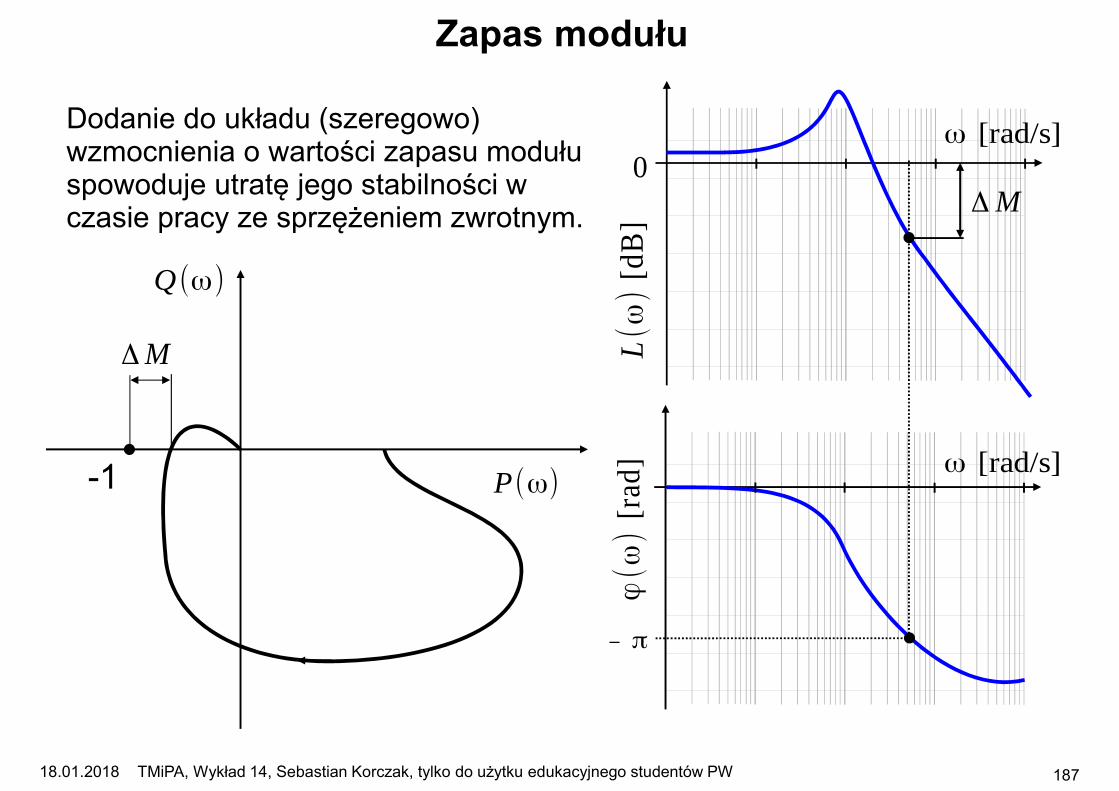
Zapas modułu
P(ω)
Q(ω)
ΔM
-1
L(ω
) [d
B]
ω [rad/s]
φ(ω
) [r
ad] ω [rad/s]
− π
ΔM0
Dodanie do układu (szeregowo) wzmocnienia o wartości zapasu modułu spowoduje utratę jego stabilności w czasie pracy ze sprzężeniem zwrotnym.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 188
Zapas fazy
P(ω)
Q(ω)
-1
Δφ
L(ω
) [d
B]
ω [rad/s]
φ(ω
) [r
ad] ω [rad/s]
− πΔφ
0
Dodanie do układu (szeregowo) obiektu opóźniającego o wartości zapasu fazy spowoduje utratę jego stabilności w czasie pracy ze sprzężeniem zwrotnym.
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 189
Wykład 14
Powtórzenie materiału.Informacje o egzaminie.
Ankiety.
Licencja: tylko do edukacyjnego użytku studentów Politechniki Warszawskiej.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 190
Teoria maszyn i podstawy automatyki
semestr zimowy 2017/2018
inżynieria pojazdów elektrycznych i hybrydowych / mechatronika
wykład: 30 godzin
projekt: 15 godzin
ECTS: 2+2
Typ zaliczenia: E / Z1

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 191
Warunek dopuszczenia do egzaminu:zaliczenie zajęć projektowych na ocenę co najmniej dostateczną
Warunek zaliczenia zajęć projektowych:Oddanie i przyjęcie przez prowadzącego grupę wszystkich projektów orazuzyskanie co najmniej dostatecznej oceny końcowej
Zasady-studiowania-na-wydziale-SiMR-w-roku-akademickim-2016-2017
“Terminem ustalenia oceny zaliczenia przedmiotu typu „Z1” jest ostatnidzień sesji egzaminacyjnej danego semestru”
“Zaliczenie wchodzących w skład przedmiotu typu „E” ćwiczeń laboratoryjnych lub projektowych może być honorowane w latach następnych na podstawie decyzji osoby odpowiedzialnej za przedmiot.”
UWAGA: osoby z zaliczonym projektem we wcześniejszych latach muszązgłosić to prowadzącemu grupę, w której są formalnie wpisani.
Przed egzaminem proszę sprawdzić prawidłowość oceny z projektu wUSOS (na stronie mogę wstawić zbiorczą listę ocen z projektów).
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 192
EGZAMIN – TERMIN 1
1 luty 2018 r. (czwartek)
11:45 – otwarcie sali
12:00-12:10 – sprawy organizacyjne
12:10-13:00 – pisanie egzaminu
od 13:25 – egzamin grupy angielskiej
5 luty 2018 r. (poniedziałek)
do 12:00 – publikacja wyników egzaminu na stronie
internetowej http://myinventions.pl/dydaktyka/
12:00-14:00 – możliwość wpisu oceny do indeksu
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 193
EGZAMIN – TERMIN 2
8 luty 2018 r. (czwartek)
11:45 – otwarcie sali
12:00-12:10 – sprawy organizacyjne
12:10-13:00 – pisanie egzaminu
od 13:30 – egzamin grupy angielskiej
do 11 luty 2018 r. (niedziela) do godz 23:59
publikacja wyników egzaminu na stronie internetowej
http://myinventions.pl/dydaktyka/
oraz ostateczne wpisanie ocen do USOS
12 luty 2018 r. (poniedziałek) – możliwość wpisu oceny
do indeksu (dokładniejsze godziny będą podane na stronie)
18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 194
EGZAMIN – WAŻNE UWAGI
Na egzaminie należy obowiązkowo na ławce położyć indeks lub legitymację.
Brak oceny z projektu w USOS = egzamin nie będzie sprawdzany.
Proszę nie tracić czasu na pierwszy termin egzaminu jeśli jest się nieprzygotowanym.
Proszę pisać na papierze formatu A4 (czytelnie; najlepiej na papierze podaniowym). Każdy musi oddać pracę.
Absolutny zakaz używania urządzeń elektronicznych podczas egzaminu (telefony, zegarki smart, kalkulatory).
conajmniej 2 osoby pilnujące na sali – przyłapanie na ściąganiu oznacza zakończenie egzaminu z oceną 2.
Tematy egzaminacyjne będą dyktowane i wyświetlane.
Niezbędne elementy z tabeli transformat będą wyświetlone.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 195
EGZAMIN – WAŻNE UWAGI
Tematy egzaminu będą oceniane na punkty w zależności od trudności.
Ocena z egzaminu wyliczona zostanie na podstawie uzyskania sumarycznej liczby punktów w zakresie:
< 50% - ocena 2
51%-60% - ocena 3,0
61%-70% - ocena 3,5
71%-80% - ocena 4,0
81%-90% - ocena 4,5
>90% - ocena 5,0
Ocena końcowa z przedmiotu = średnia arytmetyczna ocen z projektu i egzaminu (jeśli i projekt i egzamin zaliczone).

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 196
EGZAMIN
Egzamin pisemny sprawdzający wiedzęi umiejętności zdobyte na wykładzie.
PROGRAM WYKŁADU
1. Mechanizmy – ruchliwość, prędkości i przyspieszenia, dynamika.2. Dynamika maszyn – redukcja układu, równanie ruchu maszyny, koło zamachowe.3. Podstawowe obiekty automatyki i ich charakterystyki.4. Schematy blokowe.5. Regulatory.6. Stabilność.

18.01.2018 TMiPA, Wykład 14, Sebastian Korczak, tylko do użytku edukacyjnego studentów PW 197
Plan na wykład nr 15
Współczesne problemy teorii sterowania.
prezentacja doświadczenia.
Konsultacje.