Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania ... · dialogowe, w którym możemy...
20
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elementów i Układów Automatyzacji Sterownik programowalny – wejścia/wyjście analogowe Instrukcja do ćwiczenia Opracował: Krzysztof Kluczyński Aktualizował 24.02.2012 Frederik Stefański
Transcript of Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania ... · dialogowe, w którym możemy...

Politechnika PoznańskaWydział Budowy Maszyn i Zarządzania
Instytut Technologii Mechanicznej
Laboratorium Elementów i UkładówAutomatyzacji
Sterownik programowalny – wejścia/wyjście analogowe
Instrukcja do ćwiczenia
Opracował: Krzysztof Kluczyński
Aktualizował 24.02.2012Frederik Stefański
OGÓLNE ZASADY BEZPIECZEŃSTWAPODCZAS WYKONYWANIA ĆWICZEŃ LABORATORYJNYCH
Przed przystąpieniem do ćwiczenia należy zapoznać się z instrukcją dydaktyczną.
Dokonać oględzin urządzeń, przyrządów i przewodów używanych podczas
ćwiczenia. W przypadku zauważenia nieprawidłowości lub uszkodzeń bezzwłocznie
powiadomić prowadzącego.
Zabrania się samodzielnego załączania stanowiska bez sprawdzenia połączeń
i wydaniu zgody przez prowadzącego.
Zmian parametrów lub konfiguracji stanowiska przy użyciu dostępnych
przełączników i potencjometrów można dokonywać po uprzednim przeanalizowaniu
skutków takich działań.
Zmian w konfiguracji obwodów elektrycznych polegających na zmianie połączeń
przewodów lub wymianie przyrządów, należy dokonywać po uprzednim wyłączeniu
zasilania stanowiska.
Zabrania się wykonywania przełączeń (przewodów, urządzeń) w układzie
znajdującym się pod napięciem.
Przy obsłudze stanowisk, które zawierają elementy zasilane napięciem elektrycznym
wyższym niż napięcie bezpieczne, należy zachować szczególną ostrożność w celu
uniknięcia porażenia prądem elektrycznym.
Stosowanie ustawień i procedur innych niż opisane w instrukcji lub zalecone przez
prowadzącego może spowodować nieprzewidziane działanie, a nawet uszkodzenie
stanowiska.
Przekroczenie dopuszczalnych parametrów (napięć, prądów) może doprowadzić
do uszkodzenia elementów stanowiska, pożaru lub porażenia prądem.
W przypadku nieprawidłowego działania urządzeń lub wystąpienia objawów
uszkodzeń (np. iskrzenie, zapach spalenizny) należy natychmiast wyłączyć
stanowisko i powiadomić prowadzącego.
1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania i sposobem
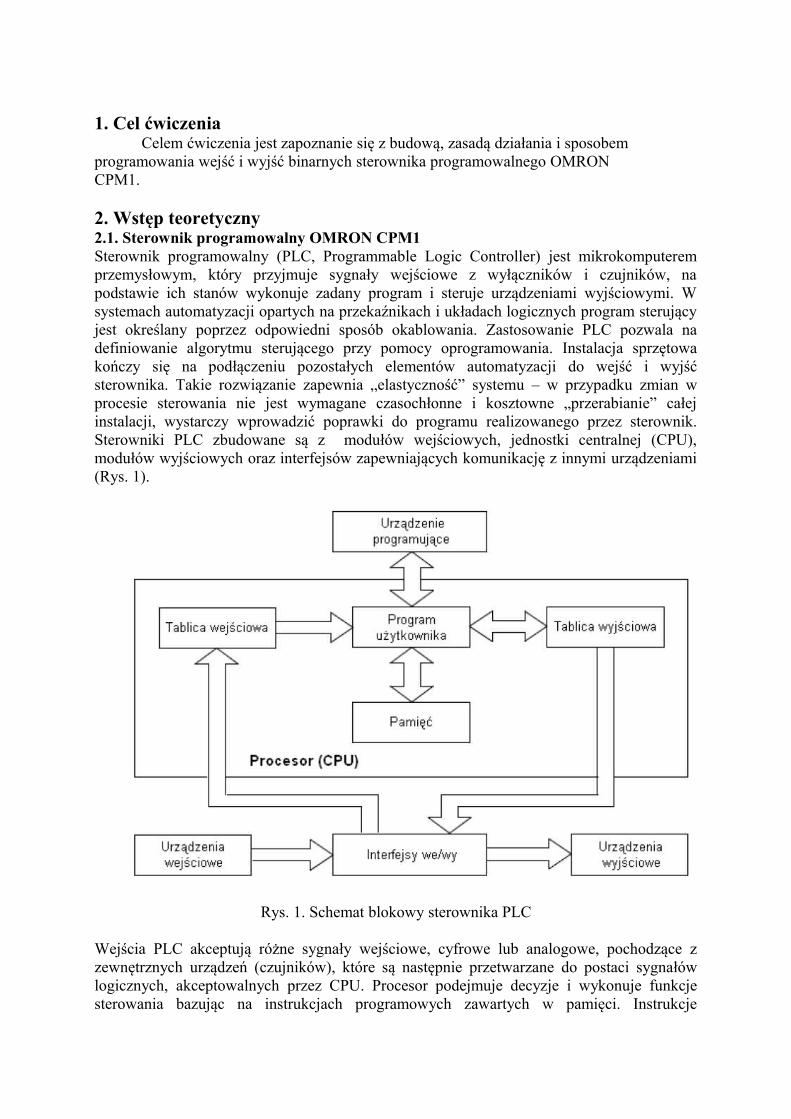
programowania wejść i wyjść binarnych sterownika programowalnego OMRON CPM1. 2. Wstęp teoretyczny2.1. Sterownik programowalny OMRON CPM1 Sterownik programowalny (PLC, Programmable Logic Controller) jest mikrokomputerem przemysłowym, który przyjmuje sygnały wejściowe z wyłączników i czujników, na podstawie ich stanów wykonuje zadany program i steruje urządzeniami wyjściowymi. W systemach automatyzacji opartych na przekaźnikach i układach logicznych program sterujący jest określany poprzez odpowiedni sposób okablowania. Zastosowanie PLC pozwala na definiowanie algorytmu sterującego przy pomocy oprogramowania. Instalacja sprzętowa kończy się na podłączeniu pozostałych elementów automatyzacji do wejść i wyjść sterownika. Takie rozwiązanie zapewnia „elastyczność” systemu – w przypadku zmian w procesie sterowania nie jest wymagane czasochłonne i kosztowne „przerabianie” całej instalacji, wystarczy wprowadzić poprawki do programu realizowanego przez sterownik. Sterowniki PLC zbudowane są z modułów wejściowych, jednostki centralnej (CPU), modułów wyjściowych oraz interfejsów zapewniających komunikację z innymi urządzeniami (Rys. 1).
Rys. 1. Schemat blokowy sterownika PLC Wejścia PLC akceptują różne sygnały wejściowe, cyfrowe lub analogowe, pochodzące z zewnętrznych urządzeń (czujników), które są następnie przetwarzane do postaci sygnałów logicznych, akceptowalnych przez CPU. Procesor podejmuje decyzje i wykonuje funkcje sterowania bazując na instrukcjach programowych zawartych w pamięci. Instrukcje
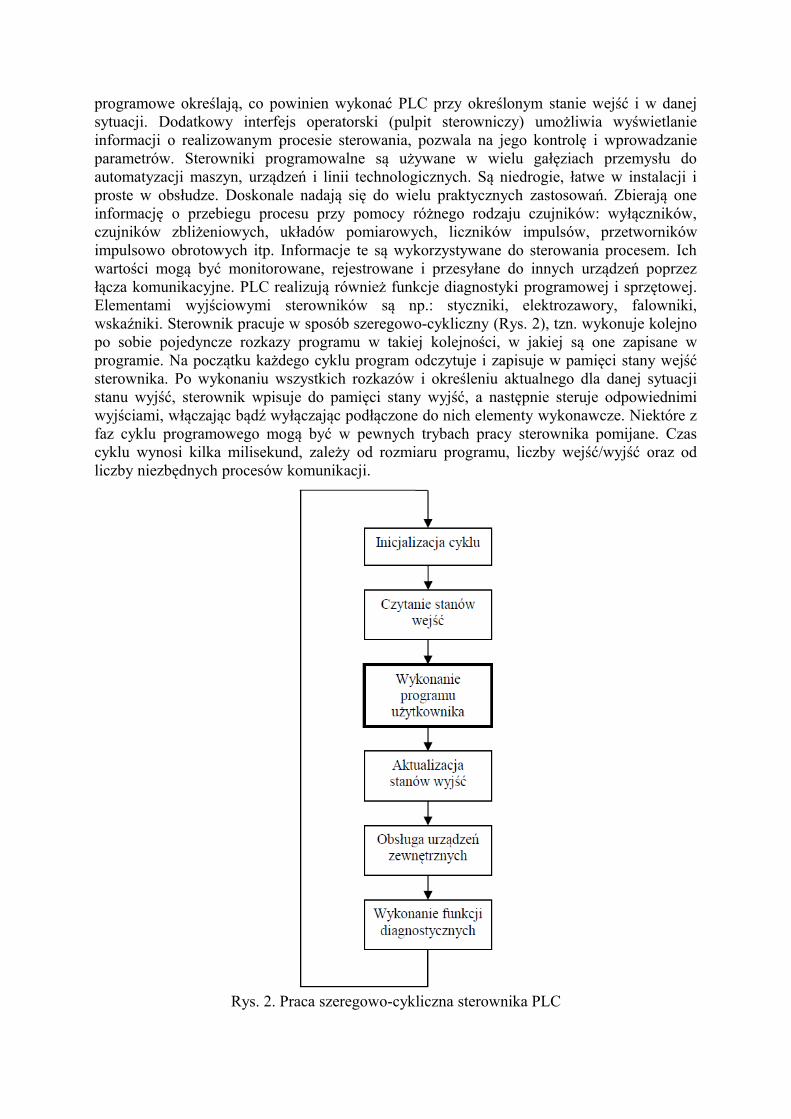
programowe określają, co powinien wykonać PLC przy określonym stanie wejść i w danej sytuacji. Dodatkowy interfejs operatorski (pulpit sterowniczy) umożliwia wyświetlanie informacji o realizowanym procesie sterowania, pozwala na jego kontrolę i wprowadzanie parametrów. Sterowniki programowalne są używane w wielu gałęziach przemysłu do automatyzacji maszyn, urządzeń i linii technologicznych. Są niedrogie, łatwe w instalacji i proste w obsłudze. Doskonale nadają się do wielu praktycznych zastosowań. Zbierają one informację o przebiegu procesu przy pomocy różnego rodzaju czujników: wyłączników, czujników zbliżeniowych, układów pomiarowych, liczników impulsów, przetworników impulsowo obrotowych itp. Informacje te są wykorzystywane do sterowania procesem. Ich wartości mogą być monitorowane, rejestrowane i przesyłane do innych urządzeń poprzez łącza komunikacyjne. PLC realizują również funkcje diagnostyki programowej i sprzętowej. Elementami wyjściowymi sterowników są np.: styczniki, elektrozawory, falowniki, wskaźniki. Sterownik pracuje w sposób szeregowo-cykliczny (Rys. 2), tzn. wykonuje kolejno po sobie pojedyncze rozkazy programu w takiej kolejności, w jakiej są one zapisane w programie. Na początku każdego cyklu program odczytuje i zapisuje w pamięci stany wejść sterownika. Po wykonaniu wszystkich rozkazów i określeniu aktualnego dla danej sytuacji stanu wyjść, sterownik wpisuje do pamięci stany wyjść, a następnie steruje odpowiednimi wyjściami, włączając bądź wyłączając podłączone do nich elementy wykonawcze. Niektóre z faz cyklu programowego mogą być w pewnych trybach pracy sterownika pomijane. Czas cyklu wynosi kilka milisekund, zależy od rozmiaru programu, liczby wejść/wyjść oraz od liczby niezbędnych procesów komunikacji.
Rys. 2. Praca szeregowo-cykliczna sterownika PLC
Rozróżniamy trzy tryby pracy sterownika programowalnego: STOP/PROGRAM, MONITOR i RUN.
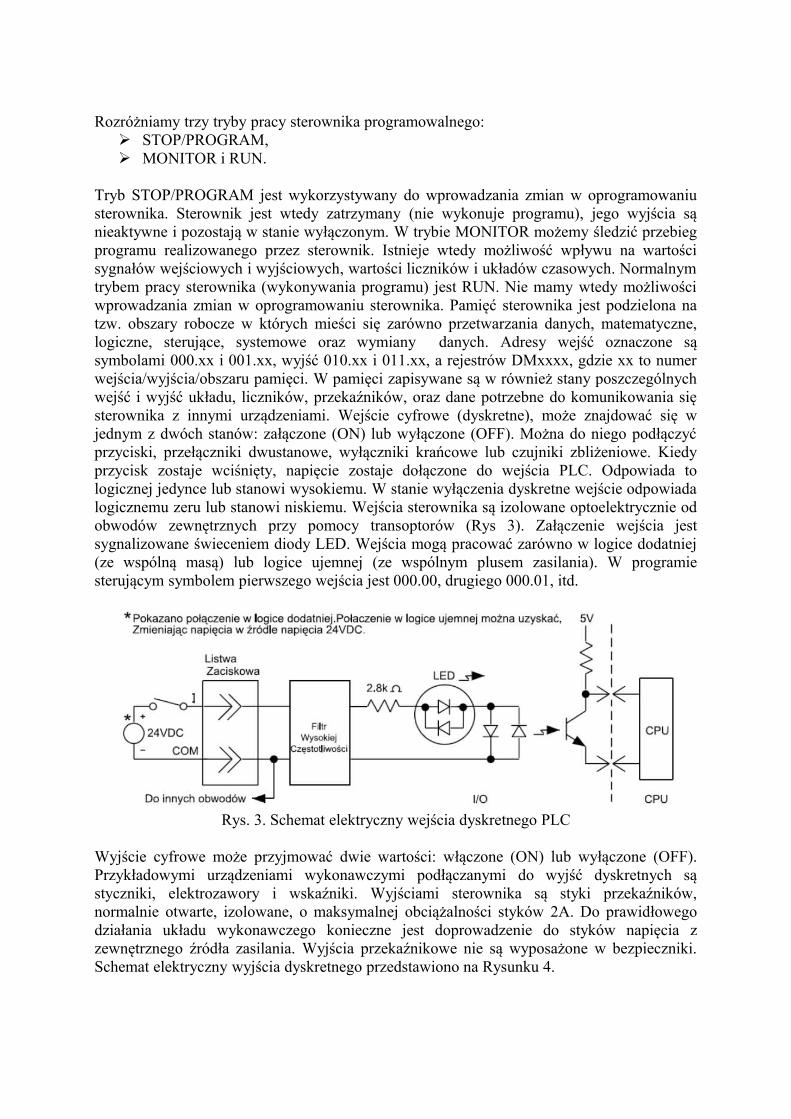
Tryb STOP/PROGRAM jest wykorzystywany do wprowadzania zmian w oprogramowaniu sterownika. Sterownik jest wtedy zatrzymany (nie wykonuje programu), jego wyjścia są nieaktywne i pozostają w stanie wyłączonym. W trybie MONITOR możemy śledzić przebieg programu realizowanego przez sterownik. Istnieje wtedy możliwość wpływu na wartości sygnałów wejściowych i wyjściowych, wartości liczników i układów czasowych. Normalnym trybem pracy sterownika (wykonywania programu) jest RUN. Nie mamy wtedy możliwości wprowadzania zmian w oprogramowaniu sterownika. Pamięć sterownika jest podzielona na tzw. obszary robocze w których mieści się zarówno przetwarzania danych, matematyczne, logiczne, sterujące, systemowe oraz wymiany danych. Adresy wejść oznaczone są symbolami 000.xx i 001.xx, wyjść 010.xx i 011.xx, a rejestrów DMxxxx, gdzie xx to numer wejścia/wyjścia/obszaru pamięci. W pamięci zapisywane są w również stany poszczególnych wejść i wyjść układu, liczników, przekaźników, oraz dane potrzebne do komunikowania się sterownika z innymi urządzeniami. Wejście cyfrowe (dyskretne), może znajdować się w jednym z dwóch stanów: załączone (ON) lub wyłączone (OFF). Można do niego podłączyć przyciski, przełączniki dwustanowe, wyłączniki krańcowe lub czujniki zbliżeniowe. Kiedy przycisk zostaje wciśnięty, napięcie zostaje dołączone do wejścia PLC. Odpowiada to logicznej jedynce lub stanowi wysokiemu. W stanie wyłączenia dyskretne wejście odpowiada logicznemu zeru lub stanowi niskiemu. Wejścia sterownika są izolowane optoelektrycznie od obwodów zewnętrznych przy pomocy transoptorów (Rys 3). Załączenie wejścia jest sygnalizowane świeceniem diody LED. Wejścia mogą pracować zarówno w logice dodatniej (ze wspólną masą) lub logice ujemnej (ze wspólnym plusem zasilania). W programie sterującym symbolem pierwszego wejścia jest 000.00, drugiego 000.01, itd.
Rys. 3. Schemat elektryczny wejścia dyskretnego PLC
Wyjście cyfrowe może przyjmować dwie wartości: włączone (ON) lub wyłączone (OFF). Przykładowymi urządzeniami wykonawczymi podłączanymi do wyjść dyskretnych są styczniki, elektrozawory i wskaźniki. Wyjściami sterownika są styki przekaźników, normalnie otwarte, izolowane, o maksymalnej obciążalności styków 2A. Do prawidłowego działania układu wykonawczego konieczne jest doprowadzenie do styków napięcia z zewnętrznego źródła zasilania. Wyjścia przekaźnikowe nie są wyposażone w bezpieczniki. Schemat elektryczny wyjścia dyskretnego przedstawiono na Rysunku 4.
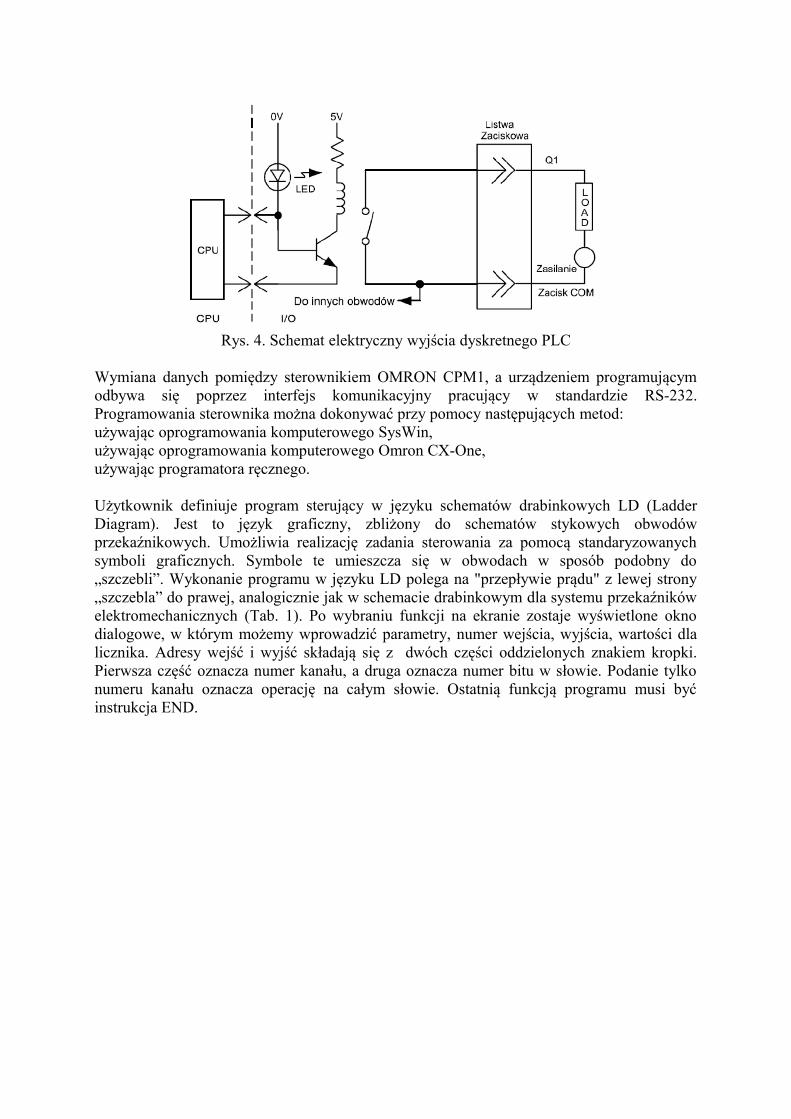
Rys. 4. Schemat elektryczny wyjścia dyskretnego PLC
Wymiana danych pomiędzy sterownikiem OMRON CPM1, a urządzeniem programującym odbywa się poprzez interfejs komunikacyjny pracujący w standardzie RS-232. Programowania sterownika można dokonywać przy pomocy następujących metod:używając oprogramowania komputerowego SysWin,używając oprogramowania komputerowego Omron CX-One,używając programatora ręcznego.
Użytkownik definiuje program sterujący w języku schematów drabinkowych LD (Ladder Diagram). Jest to język graficzny, zbliżony do schematów stykowych obwodów przekaźnikowych. Umożliwia realizację zadania sterowania za pomocą standaryzowanych symboli graficznych. Symbole te umieszcza się w obwodach w sposób podobny do „szczebli”. Wykonanie programu w języku LD polega na "przepływie prądu" z lewej strony „szczebla” do prawej, analogicznie jak w schemacie drabinkowym dla systemu przekaźników elektromechanicznych (Tab. 1). Po wybraniu funkcji na ekranie zostaje wyświetlone okno dialogowe, w którym możemy wprowadzić parametry, numer wejścia, wyjścia, wartości dla licznika. Adresy wejść i wyjść składają się z dwóch części oddzielonych znakiem kropki. Pierwsza część oznacza numer kanału, a druga oznacza numer bitu w słowie. Podanie tylko numeru kanału oznacza operację na całym słowie. Ostatnią funkcją programu musi być instrukcja END.
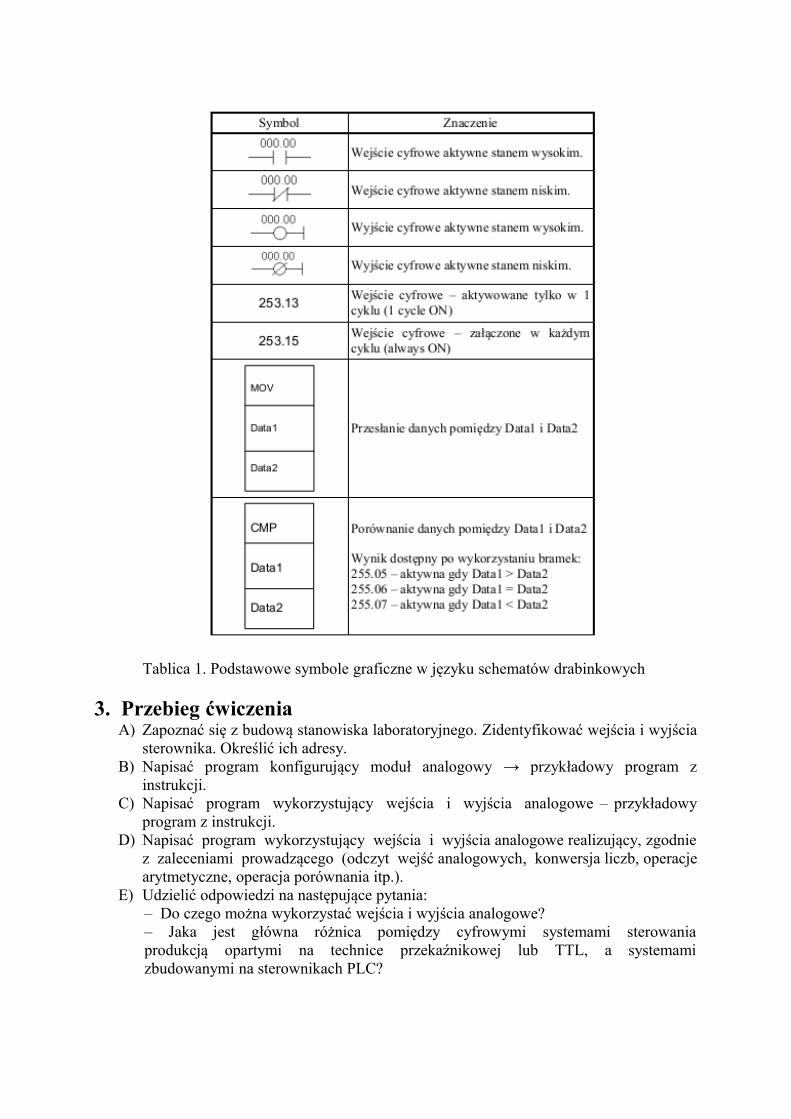
Tablica 1. Podstawowe symbole graficzne w języku schematów drabinkowych
3. Przebieg ćwiczenia A) Zapoznać się z budową stanowiska laboratoryjnego. Zidentyfikować wejścia i wyjścia
sterownika. Określić ich adresy. B) Napisać program konfigurujący moduł analogowy → przykładowy program z
instrukcji.C) Napisać program wykorzystujący wejścia i wyjścia analogowe – przykładowy
program z instrukcji. D) Napisać program wykorzystujący wejścia i wyjścia analogowe realizujący, zgodnie
z zaleceniami prowadzącego (odczyt wejść analogowych, konwersja liczb, operacje arytmetyczne, operacja porównania itp.).
E) Udzielić odpowiedzi na następujące pytania: – Do czego można wykorzystać wejścia i wyjścia analogowe? – Jaka jest główna różnica pomiędzy cyfrowymi systemami sterowania produkcją opartymi na technice przekaźnikowej lub TTL, a systemami zbudowanymi na sterownikach PLC?
4. Sprawozdanie z ćwiczenia W sprawozdaniu należy zamieścić opis czynności wykonanych podczas ćwiczenia, schematy drabinkowe, odpowiedzi na postawione pytania oraz własne uwagi, komentarze i wnioski.
5. Zagadnienia budowa i zasada działania sterownika programowalnego, język schematów drabinkowych, sterownik OMRON CPM-1.
6. Literatura [1] www.omron.pl
Zasady pracy w cx programerem
1. W sali laboratoryjnej są dwa stanowiska. Jedno to OMRON SYSMAC CMP1 (rys. 1), a drugie to OMRON SYSMAC CMP1A (rys. 2).
Rys. 1 OMRON SYSMAC CMP1
Rys. 2 OMRON SYSMAC CMP1A
2. Sprawdzamy czy sterownik jest podłączony do zasilania oraz ma zapewnioną komunikację z komputerem (rys. 3), podłączony do com oraz pali się lampka PWR.
Rys. 3 Właściwie podłączony sterownik
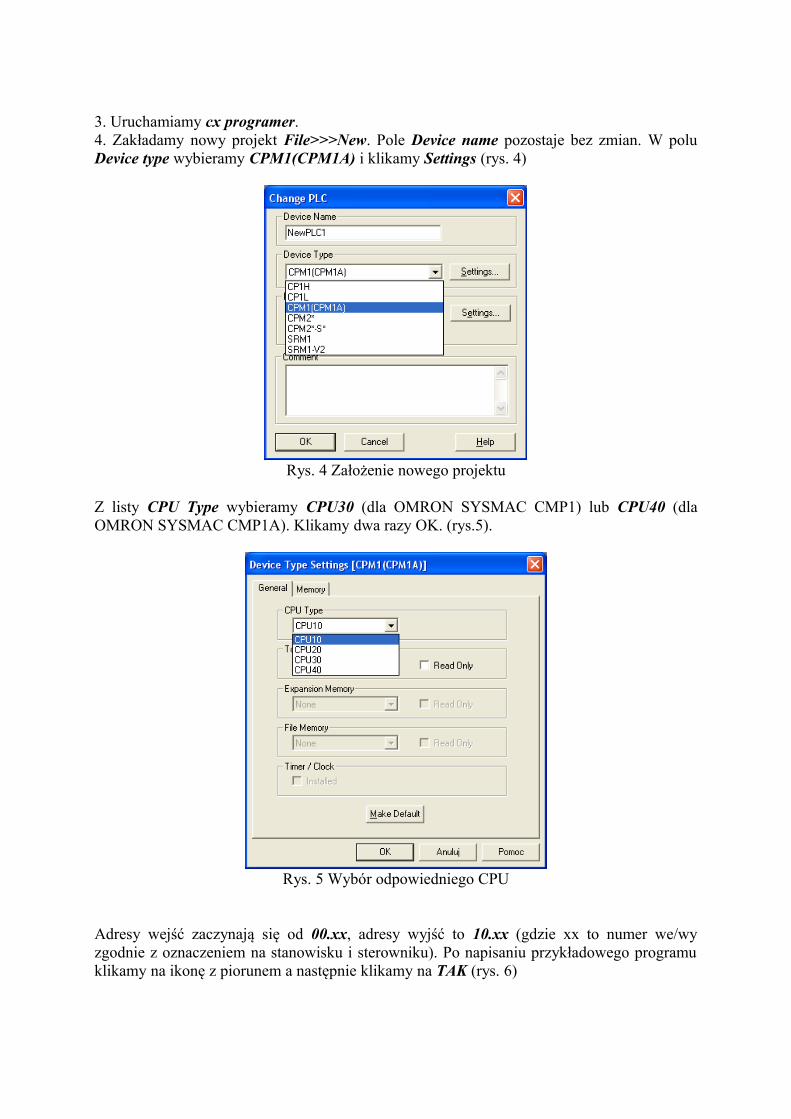
3. Uruchamiamy cx programer.4. Zakładamy nowy projekt File>>>New. Pole Device name pozostaje bez zmian. W polu Device type wybieramy CPM1(CPM1A) i klikamy Settings (rys. 4)
Rys. 4 Założenie nowego projektu
Z listy CPU Type wybieramy CPU30 (dla OMRON SYSMAC CMP1) lub CPU40 (dla OMRON SYSMAC CMP1A). Klikamy dwa razy OK. (rys.5).
Rys. 5 Wybór odpowiedniego CPU
Adresy wejść zaczynają się od 00.xx, adresy wyjść to 10.xx (gdzie xx to numer we/wy zgodnie z oznaczeniem na stanowisku i sterowniku). Po napisaniu przykładowego programu klikamy na ikonę z piorunem a następnie klikamy na TAK (rys. 6)
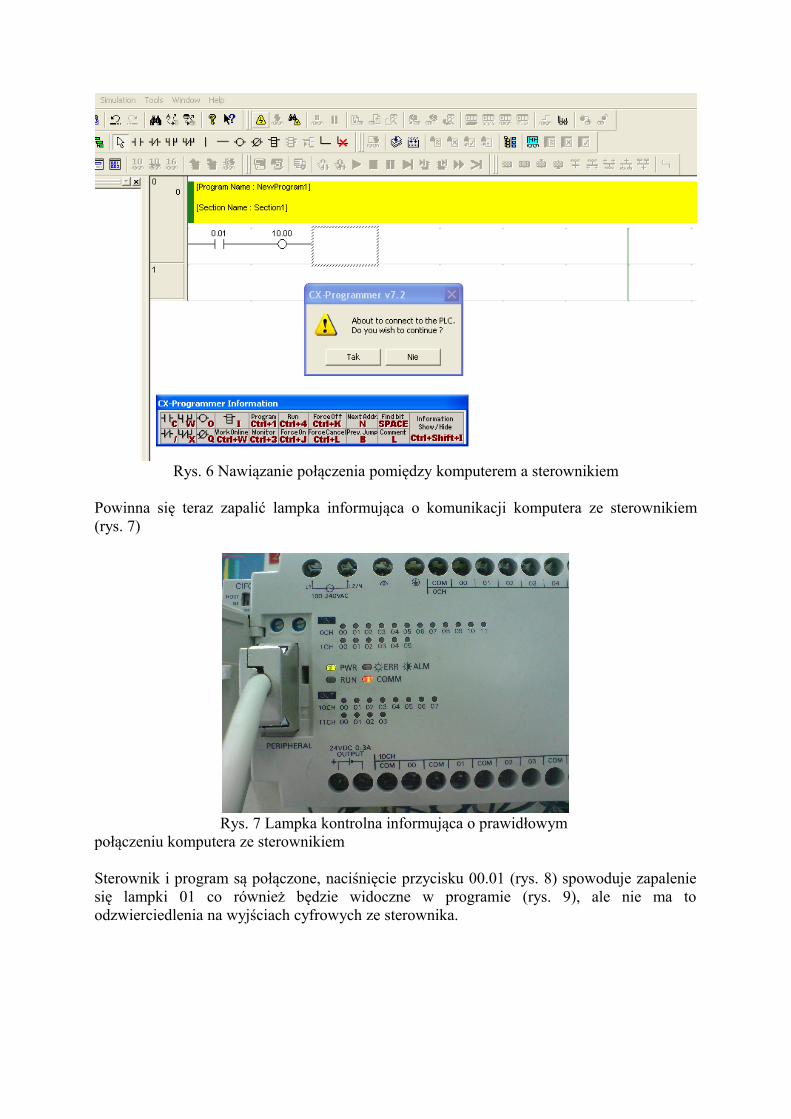
Rys. 6 Nawiązanie połączenia pomiędzy komputerem a sterownikiem
Powinna się teraz zapalić lampka informująca o komunikacji komputera ze sterownikiem (rys. 7)
Rys. 7 Lampka kontrolna informująca o prawidłowym połączeniu komputera ze sterownikiem
Sterownik i program są połączone, naciśnięcie przycisku 00.01 (rys. 8) spowoduje zapalenie się lampki 01 co również będzie widoczne w programie (rys. 9), ale nie ma to odzwierciedlenia na wyjściach cyfrowych ze sterownika.
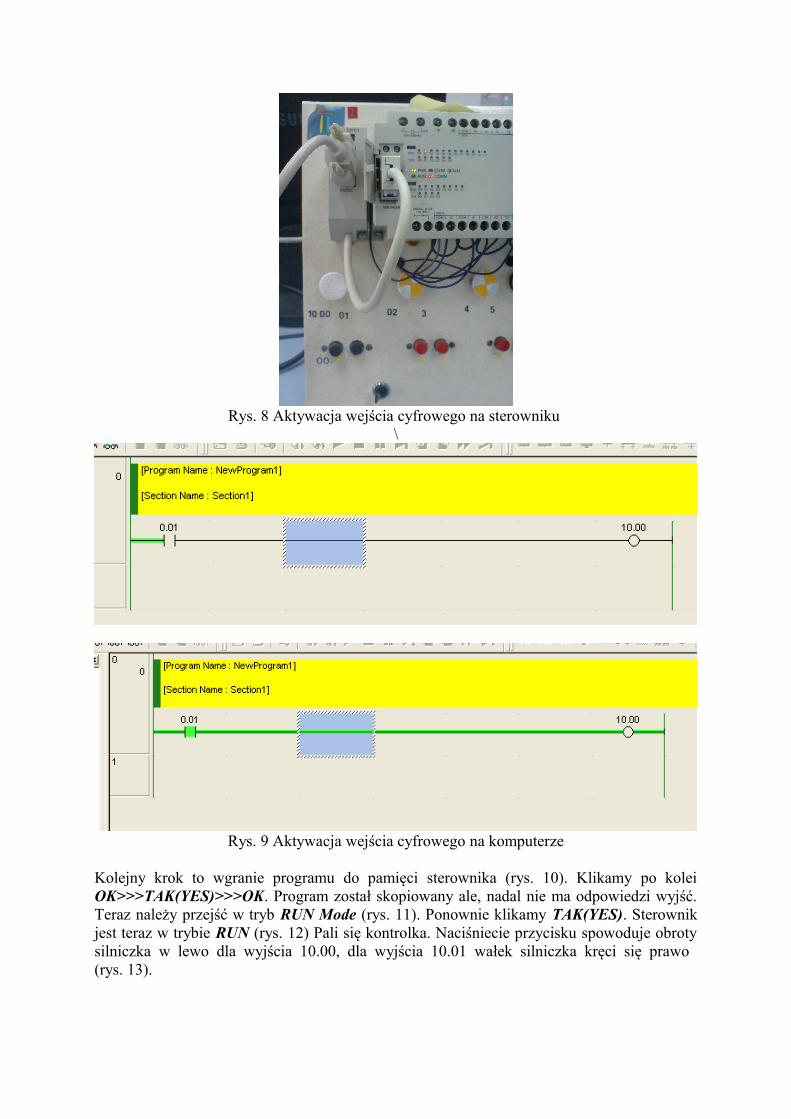
Rys. 8 Aktywacja wejścia cyfrowego na sterowniku \
Rys. 9 Aktywacja wejścia cyfrowego na komputerze
Kolejny krok to wgranie programu do pamięci sterownika (rys. 10). Klikamy po kolei OK>>>TAK(YES)>>>OK. Program został skopiowany ale, nadal nie ma odpowiedzi wyjść. Teraz należy przejść w tryb RUN Mode (rys. 11). Ponownie klikamy TAK(YES). Sterownik jest teraz w trybie RUN (rys. 12) Pali się kontrolka. Naciśniecie przycisku spowoduje obroty silniczka w lewo dla wyjścia 10.00, dla wyjścia 10.01 wałek silniczka kręci się prawo (rys. 13).
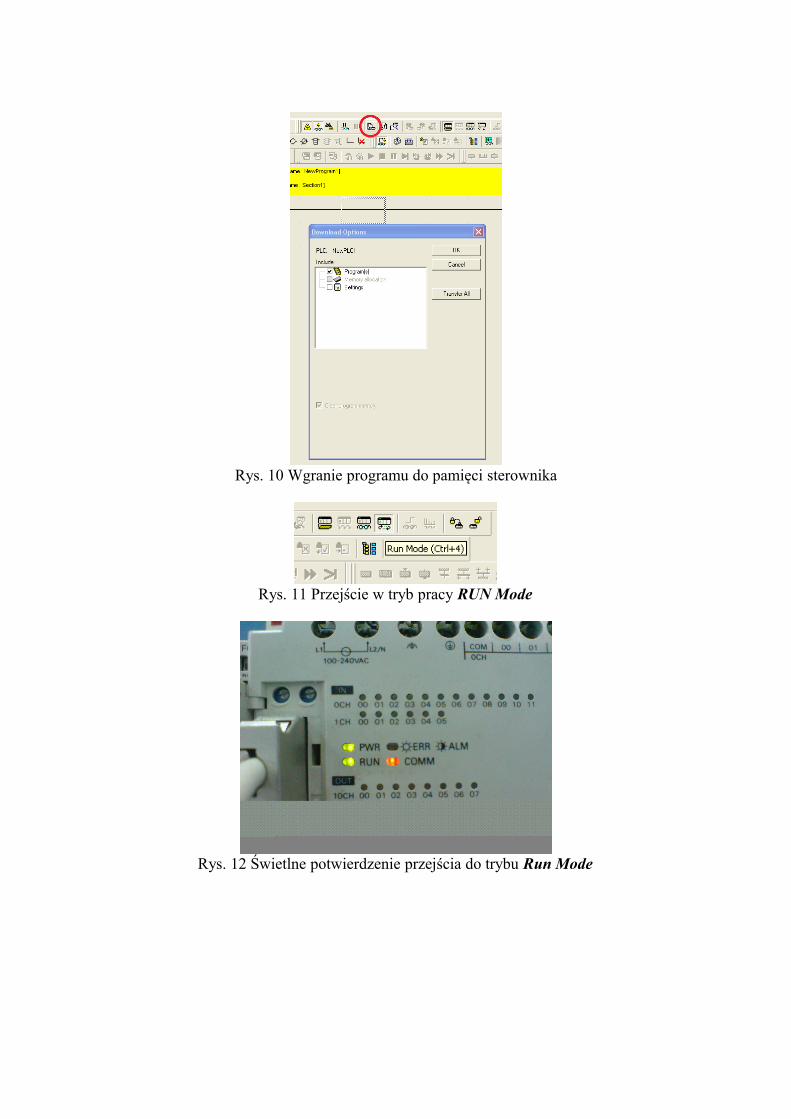
Rys. 10 Wgranie programu do pamięci sterownika
Rys. 11 Przejście w tryb pracy RUN Mode
Rys. 12 Świetlne potwierdzenie przejścia do trybu Run Mode
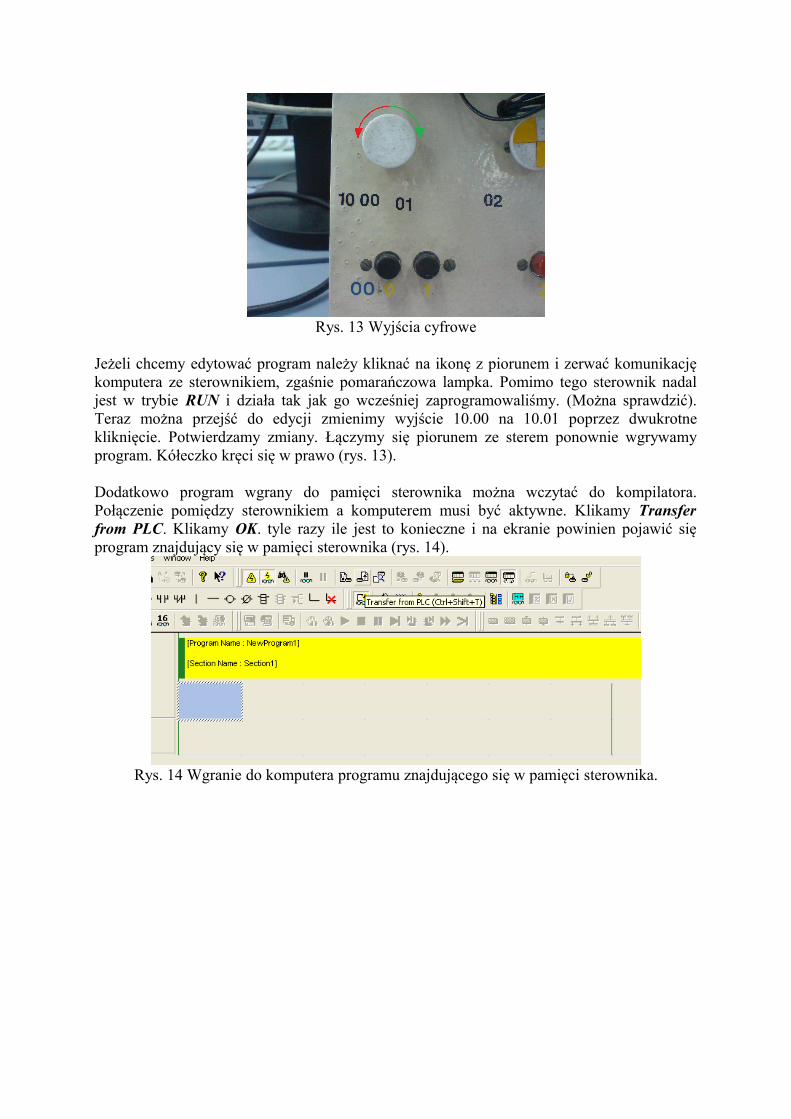
Rys. 13 Wyjścia cyfrowe
Jeżeli chcemy edytować program należy kliknać na ikonę z piorunem i zerwać komunikację komputera ze sterownikiem, zgaśnie pomarańczowa lampka. Pomimo tego sterownik nadal jest w trybie RUN i działa tak jak go wcześniej zaprogramowaliśmy. (Można sprawdzić). Teraz można przejść do edycji zmienimy wyjście 10.00 na 10.01 poprzez dwukrotne kliknięcie. Potwierdzamy zmiany. Łączymy się piorunem ze sterem ponownie wgrywamy program. Kółeczko kręci się w prawo (rys. 13).
Dodatkowo program wgrany do pamięci sterownika można wczytać do kompilatora. Połączenie pomiędzy sterownikiem a komputerem musi być aktywne. Klikamy Transfer from PLC. Klikamy OK. tyle razy ile jest to konieczne i na ekranie powinien pojawić się program znajdujący się w pamięci sterownika (rys. 14).
Rys. 14 Wgranie do komputera programu znajdującego się w pamięci sterownika.
Wstawiane Timera i Countera
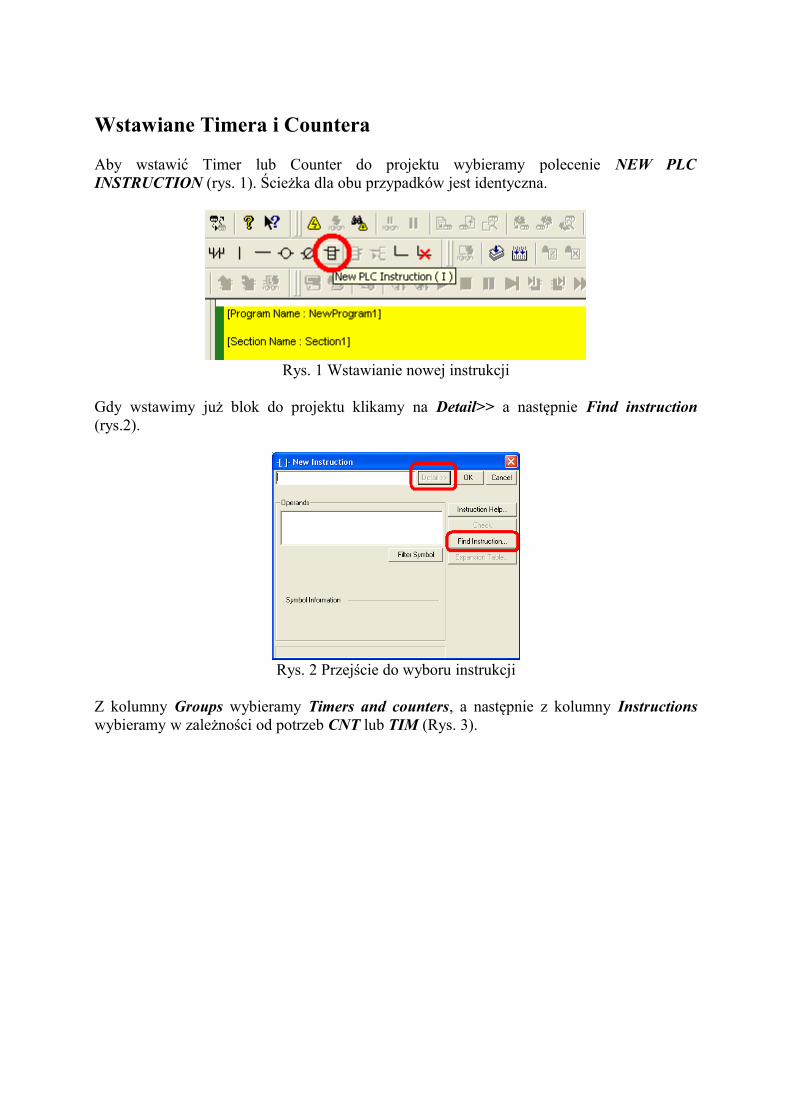
Aby wstawić Timer lub Counter do projektu wybieramy polecenie NEW PLC INSTRUCTION (rys. 1). Ścieżka dla obu przypadków jest identyczna.
Rys. 1 Wstawianie nowej instrukcji
Gdy wstawimy już blok do projektu klikamy na Detail>> a następnie Find instruction (rys.2).
Rys. 2 Przejście do wyboru instrukcji
Z kolumny Groups wybieramy Timers and counters, a następnie z kolumny Instructions wybieramy w zależności od potrzeb CNT lub TIM (Rys. 3).
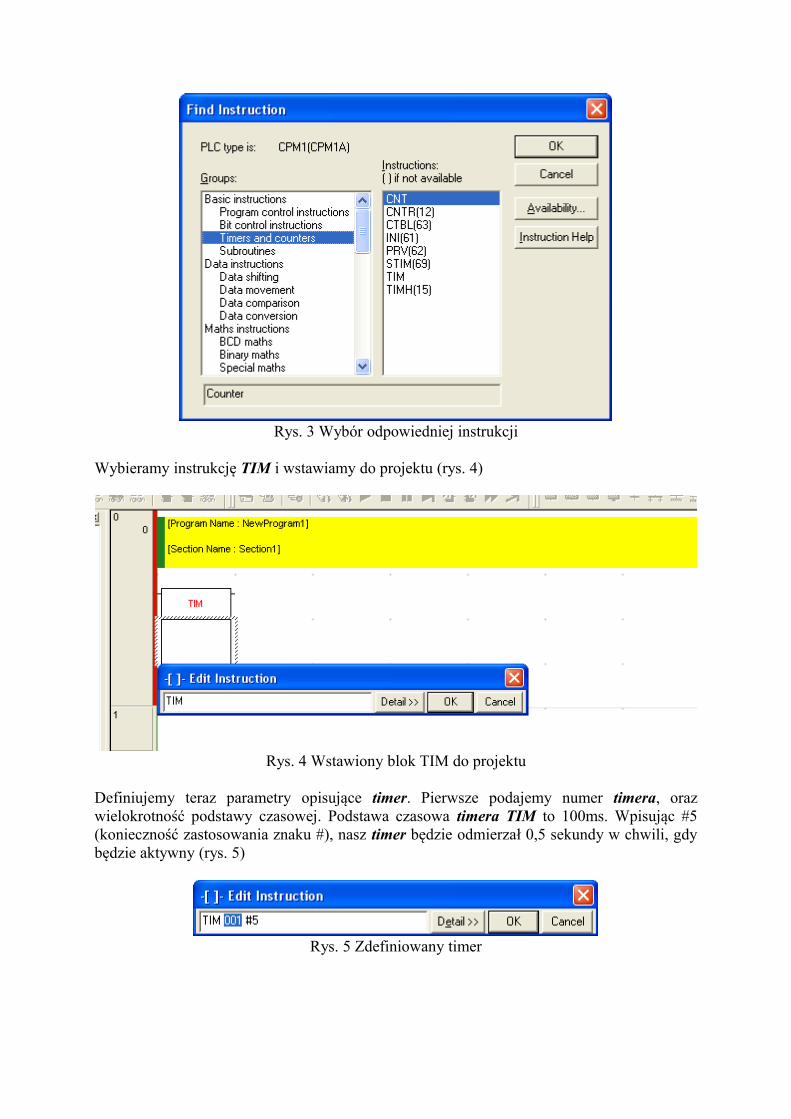
Rys. 3 Wybór odpowiedniej instrukcji
Wybieramy instrukcję TIM i wstawiamy do projektu (rys. 4)
Rys. 4 Wstawiony blok TIM do projektu
Definiujemy teraz parametry opisujące timer. Pierwsze podajemy numer timera, oraz wielokrotność podstawy czasowej. Podstawa czasowa timera TIM to 100ms. Wpisując #5 (konieczność zastosowania znaku #), nasz timer będzie odmierzał 0,5 sekundy w chwili, gdy będzie aktywny (rys. 5)
Rys. 5 Zdefiniowany timer
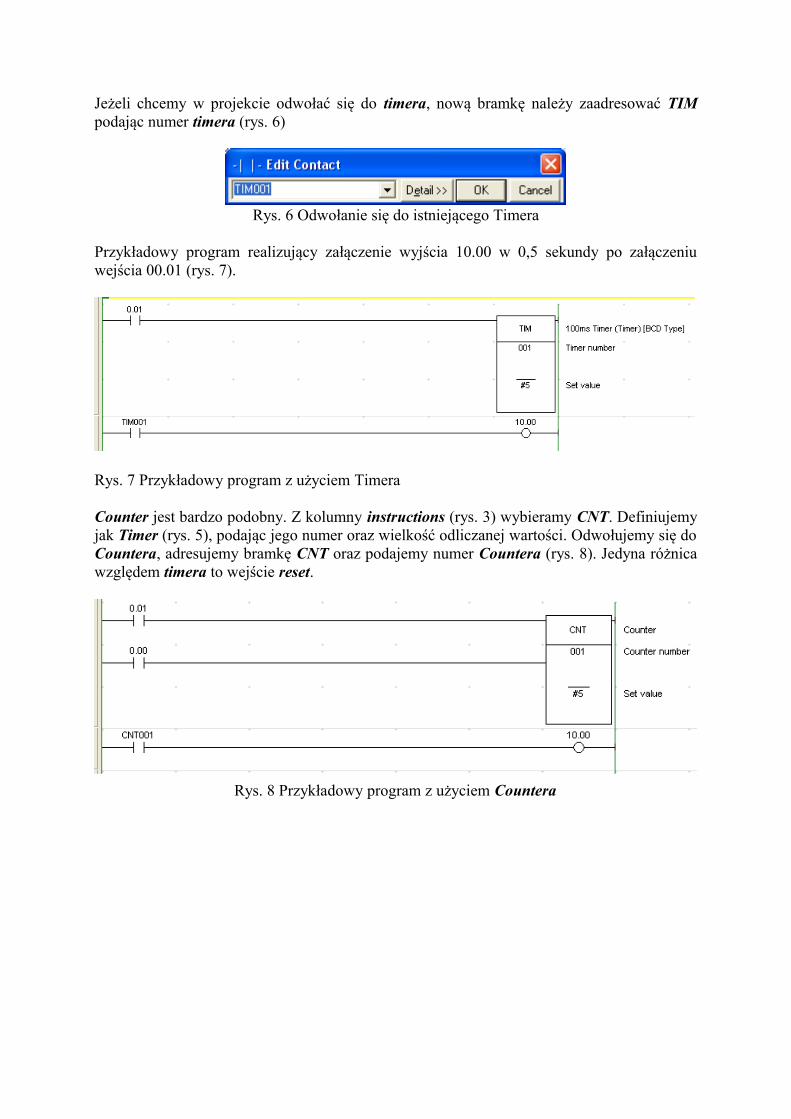
Jeżeli chcemy w projekcie odwołać się do timera, nową bramkę należy zaadresować TIM podając numer timera (rys. 6)
Rys. 6 Odwołanie się do istniejącego Timera
Przykładowy program realizujący załączenie wyjścia 10.00 w 0,5 sekundy po załączeniu wejścia 00.01 (rys. 7).
Rys. 7 Przykładowy program z użyciem Timera
Counter jest bardzo podobny. Z kolumny instructions (rys. 3) wybieramy CNT. Definiujemy jak Timer (rys. 5), podając jego numer oraz wielkość odliczanej wartości. Odwołujemy się do Countera, adresujemy bramkę CNT oraz podajemy numer Countera (rys. 8). Jedyna różnica względem timera to wejście reset.
Rys. 8 Przykładowy program z użyciem Countera
Wejścia/wyjścia analogowe – porównanie wartości wejściowej analogowej z stałą ustaloną wartością:
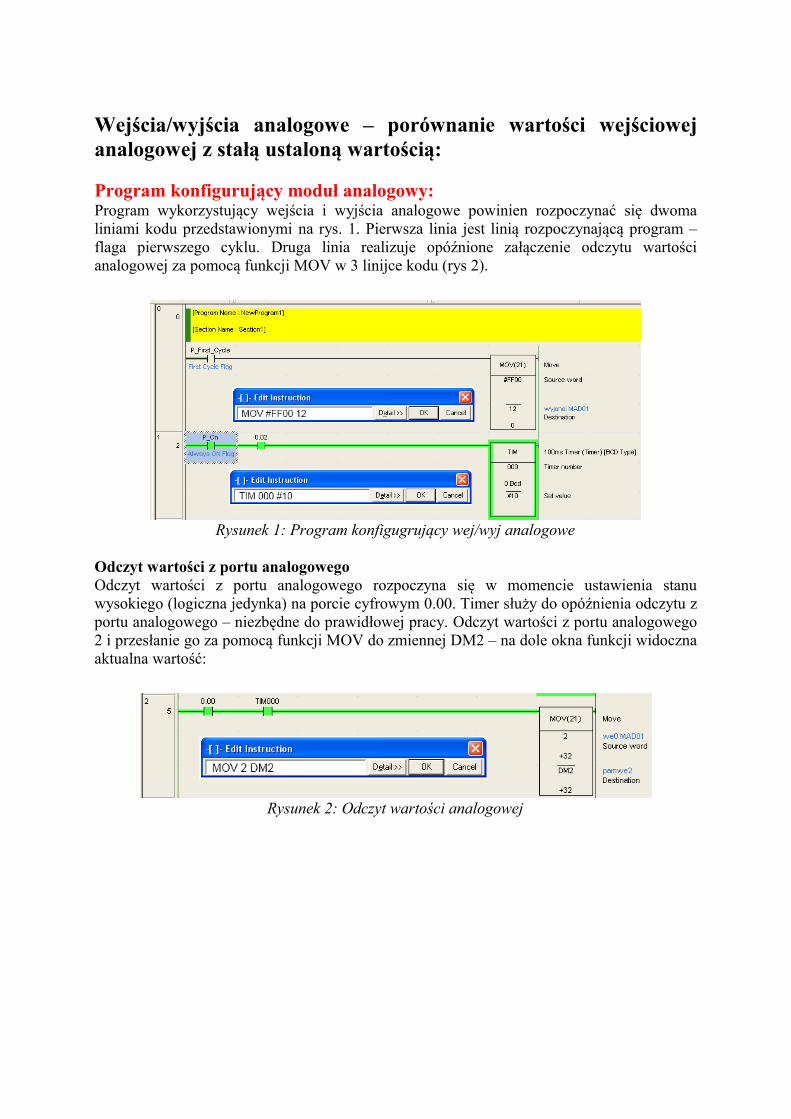
Program konfigurujący moduł analogowy:Program wykorzystujący wejścia i wyjścia analogowe powinien rozpoczynać się dwoma liniami kodu przedstawionymi na rys. 1. Pierwsza linia jest linią rozpoczynającą program – flaga pierwszego cyklu. Druga linia realizuje opóźnione załączenie odczytu wartości analogowej za pomocą funkcji MOV w 3 linijce kodu (rys 2).
Odczyt wartości z portu analogowegoOdczyt wartości z portu analogowego rozpoczyna się w momencie ustawienia stanu wysokiego (logiczna jedynka) na porcie cyfrowym 0.00. Timer służy do opóźnienia odczytu z portu analogowego – niezbędne do prawidłowej pracy. Odczyt wartości z portu analogowego 2 i przesłanie go za pomocą funkcji MOV do zmiennej DM2 – na dole okna funkcji widoczna aktualna wartość:
Rysunek 1: Program konfigugrujący wej/wyj analogowe
Rysunek 2: Odczyt wartości analogowej
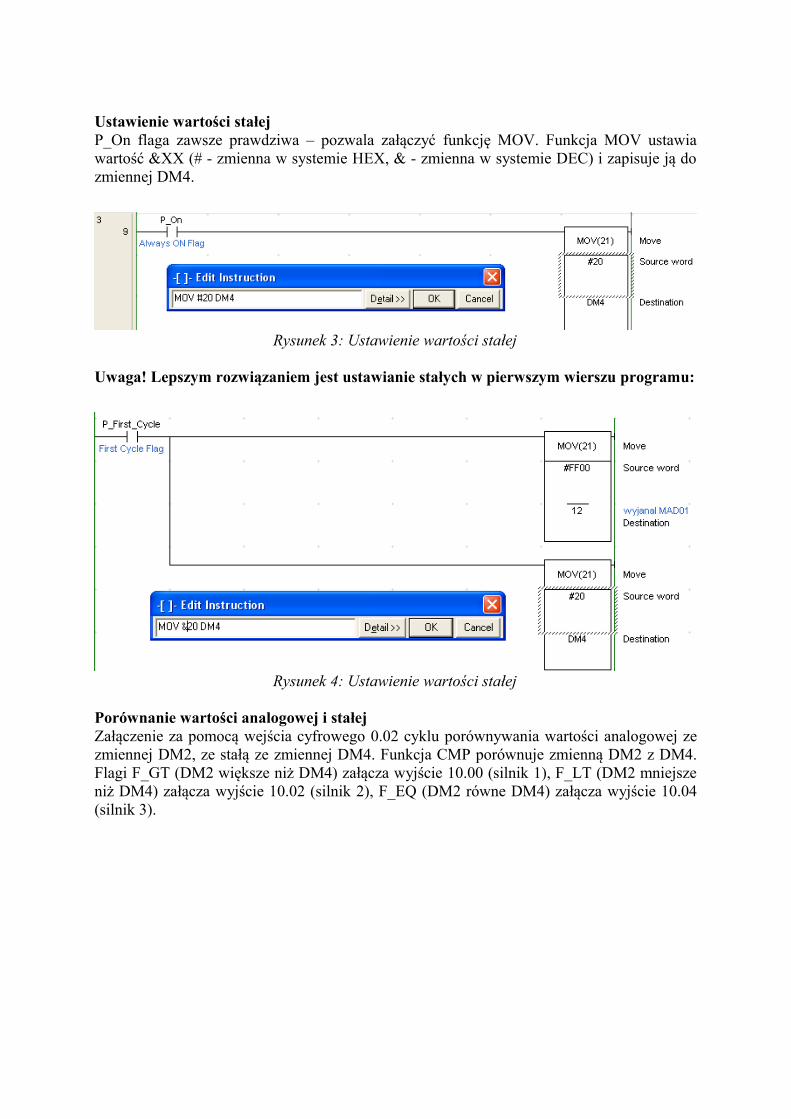
Ustawienie wartości stałejP_On flaga zawsze prawdziwa – pozwala załączyć funkcję MOV. Funkcja MOV ustawia wartość &XX (# - zmienna w systemie HEX, & - zmienna w systemie DEC) i zapisuje ją do zmiennej DM4.
Rysunek 3: Ustawienie wartości stałej
Uwaga! Lepszym rozwiązaniem jest ustawianie stałych w pierwszym wierszu programu:
Rysunek 4: Ustawienie wartości stałej
Porównanie wartości analogowej i stałejZałączenie za pomocą wejścia cyfrowego 0.02 cyklu porównywania wartości analogowej ze zmiennej DM2, ze stałą ze zmiennej DM4. Funkcja CMP porównuje zmienną DM2 z DM4. Flagi F_GT (DM2 większe niż DM4) załącza wyjście 10.00 (silnik 1), F_LT (DM2 mniejsze niż DM4) załącza wyjście 10.02 (silnik 2), F_EQ (DM2 równe DM4) załącza wyjście 10.04 (silnik 3).
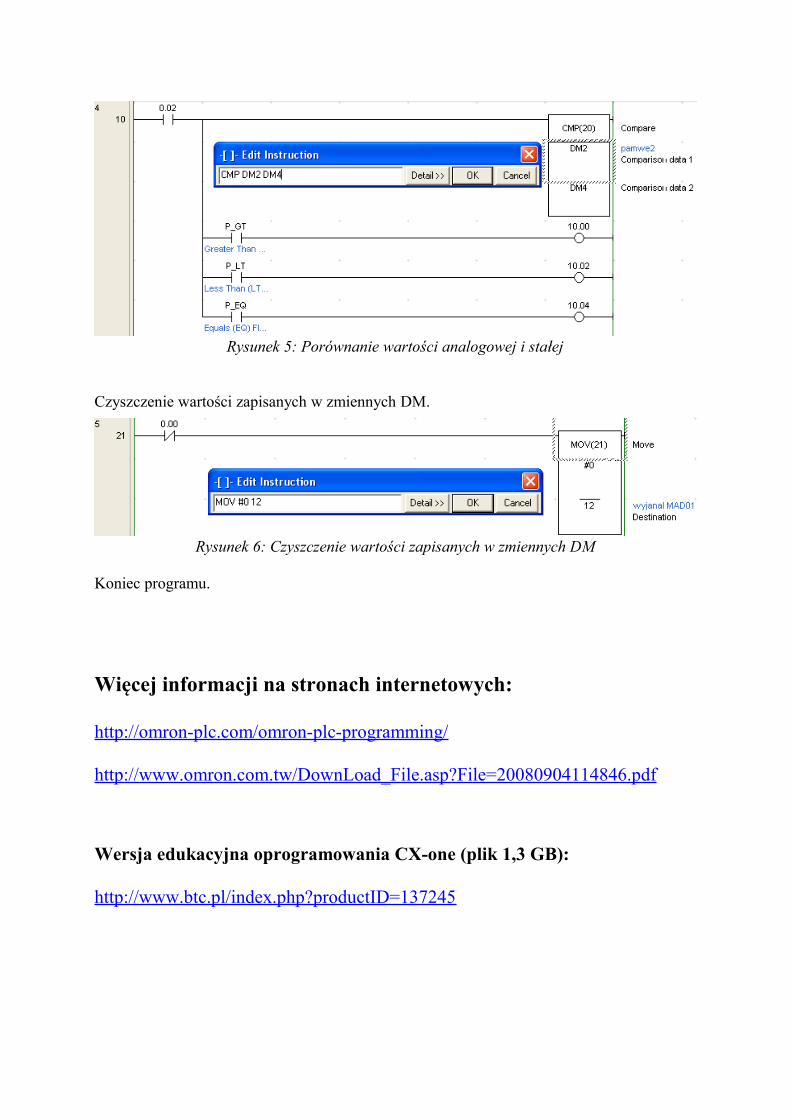
Rysunek 5: Porównanie wartości analogowej i stałej
Czyszczenie wartości zapisanych w zmiennych DM.
Rysunek 6: Czyszczenie wartości zapisanych w zmiennych DM
Koniec programu.
Więcej informacji na stronach internetowych:
http://omron-plc.com/omron-plc-programming/
http://www.omron.com.tw/DownLoad_File.asp?File=20080904114846.pdf
Wersja edukacyjna oprogramowania CX-one (plik 1,3 GB):
http://www.btc.pl/index.php?productID=137245