Podstawy Automatyki - Wyk ad 1 - pojecia podstawowe i ... · tektoniczne, procesy chemiczne w...
42
Podstawy Automatyki Wyklad 1 - pojęcia podstawowe i klasyfikacja ukladów automatyki dr inż. Jakub Możaryn Instytut Automatyki i Robotyki, Wydzial Mechatroniki PW Warszawa, 2016 dr inż. Jakub Możaryn Podstawy Automatyki
Transcript of Podstawy Automatyki - Wyk ad 1 - pojecia podstawowe i ... · tektoniczne, procesy chemiczne w...
Podstawy Automatyki
Wykład 1 - pojęcia podstawowe i klasyfikacja układów automatyki
dr inż. Jakub Możaryn
Instytut Automatyki i Robotyki, Wydział Mechatroniki PW
Warszawa, 2016
dr inż. Jakub Możaryn Podstawy Automatyki
Wstęp
Obecnie wiele urządzeń wyposażonych jest w coś, co ogólnie nazywamyautomatyką. Poczynając od sprzętu domowego jak żelazko(termoregulator), pralka automatyczna (programator) aż do urządzeń onajbardziej zaawansowanej technologii jak samolot (pilot automatyczny).
Jednym z pierwszych regulatorów, który został opracowany przezczłowieka i zastosowany w praktyce był regulator Watta do stabilizacjiobrotów maszyny parowej (rok 1784). Od tego czasu automatyka stałasię nauką, a liczba jej aplikacji praktycznych stale rośnie. Rozwinęła sięznacząco również jej teoria, obecnie obejmuje m.in.
teorię układów liniowych,
teorię układów nieliniowych,
sterowanie optymalne,
teorię układów dyskretnych (logiczne układy automatyki),
robotykę.
dr inż. Jakub Możaryn Podstawy Automatyki
Program
Dane dotyczące przedmiotów i prowadzących
PODSTAWY AUTOMATYKI - dr inż. Jakub Możaryn, Semestr IV- wykład (30 godzin), Gmach Mechatroniki, p. 346, e-mail:[email protected], strona www: http://jakubmozaryn.esy.es
PODSTAWY ROBOTYKI - prof. dr hab. inż. Mariusz Olszewski,Semestr V - wykład (15 godzin)
LABORATORIUM PODSTAW AUTOMATYKI I ROBOTYKI - mgrinż. Alicja Siewnicka, Semestr V - laboratorium (15 godzin)
dr inż. Jakub Możaryn Podstawy Automatyki
Program
Informacje o zaliczeniu
Wykład - 30 godzin
Zapoznanie z literaturą - 35 godzin
Przygotowanie do egzaminu i obecność na egzaminie- 15 godzin
Warunkiem zaliczenia przedmiotu jest zdanie egzaminupisemnego
Liczba punktów ECTS - 3
dr inż. Jakub Możaryn Podstawy Automatyki
Program
Cele przedmiotu
Nabycie umiejętności rozpoznawania i oceny problemówautomatyzacji.
Przyswojenie podstawowych pojęć automatyki procesów ciągłych,automatyki procesów dyskretnych, metod badania i określaniacharakteru elementów automatyki o działaniu ciągłym i o działaniudyskretnym.
Rozumienie zasad funkcjonowania podstawowych układów regulacji ifunkcji elementów tworzących te układy.
Poznanie wymagań stawianych układom regulacji i metodzapewnienia spełnienia tych wymagań.
Nabycie umiejętności projektowania układów przełączających wróżnych technikach realizacyjnych i o różnych zasadach działania.
dr inż. Jakub Możaryn Podstawy Automatyki
Program
Tematyka wykładów - I: Automatyka procesów ciągłych
Rodzaje procesów podlegających automatyzacji, pojęcia podstawowedotyczące techniki regulacji, sygnały w układach automatyki.
Metody matematycznego opisu liniowych układów dynamicznych,zagadnienia linearyzacji.
Podstawowe liniowe człony dynamiczne, połączenia elementarneczłonów, algebra schematów blokowych.
Obiekty regulacji - metody identyfikacji.
Regulatory PID.
Wymagania stawiane układom regulacji - kryteria stabilności,dokładność statyczna, wskaźniki jakości dynamicznej.
Dobór regulatorów i ich nastaw.
Układy z elementami nieliniowymi.
dr inż. Jakub Możaryn Podstawy Automatyki
Program
Tematyka wykładów - II: Automatyka procesów dyskretnych
Środki techniczne automatyzacji procesów dyskretnych.
Podstawy matematyczne sterowania dyskretnego - algebra Boole’a,synteza i minimalizacja funkcji logicznych.
Projektowanie układów kombinacyjnych - sieci bramkowe istykowo-przekaźnikowe, dynamika układów kombinacyjnych.
Elementarne asynchroniczne i synchroniczne układy sekwencyjne.
Projektowanie układów sekwencyjnych o programach liniowych irozgałęzionych, asynchronicznych i synchronicznych.
Typowe układy o średniej skali integracji, układymikroprogramowalne.
dr inż. Jakub Możaryn Podstawy Automatyki
Literatura
Holejko D., Kościelny W.: Automatyka procesów ciągłych.Oficyna Wyd. PW, Warszawa 2012.
Kościelny W.: Podstawy automatyki – materiały do wykładudla studentów kierunku Inżynieria Biomedyczna.
Żelazny M.: Podstawy Automatyki. WNT, Warszawa 1976.
Kościelny W.: Materiały pomocnicze do nauczania podstawautomatyki. Oficyna Wydawnicza PW, Warszawa 2001, wyd. III.
Kościelny W.: Podstawy automatyki, część II. WydawnictwaPolitechniki Warszawskiej, 198.
Holejko D., Kościelny W., Niewczas W.: Zbiór zadań z podstawautomatyki. Wydawnictwa Politechniki Warszawskiej, 1985, wyd.VIII.
Gessing R.: Podstawy automatyki. Wydawnictwo PolitechnikiŚląskiej, 2001.
Mazurek J., Vogt H., Żydanowicz W.: Podstawy automatyki.Oficyna Wydawnicza PW, Warszawa 2002.
dr inż. Jakub Możaryn Podstawy Automatyki
Procesy naturalne i technologiczne
Procesy naturalne
Fizyczne i chemiczne przemiany stanu materii dokonujące się bez udziałuczłowieka. Przykłady: zmiany pogody, ruch wody w rzekach, ruchytektoniczne, procesy chemiczne w organizmie człowieka.
Procesy technologiczne
Procesy realizowane przez człowieka za pomocą odpowiednich,zbudowanych przez niego urządzeń, w celu uzyskania zamierzonychzmian stanu materii. Przykład: zmiana temperatury w szklarni, zmianapoziomu wody w zbiornikach w instalacjach chemicznych.
W trakcie wykładu będą omawiane zagadnienia związane z procesamitechnologicznymi.
dr inż. Jakub Możaryn Podstawy Automatyki
Procesy technologiczne
Procesy ciągłe
Procesy, do opisu przebiegu których są wykorzystywane wielkości fizycznemogące przyjmować nieskończenie wiele różnych wartości
Przykłady to: temperatura, ciśnienie, natężenie przepływu, gęstość,lepkość, wilgotność, długość, siła, prędkość, przyspieszenie, stosunekzawartości składników, napięcie i natężenie prądu.
Procesy dyskretne (nieciągłe)
Procesy, do opisu których są wykorzystywane wielkości fizyczne oskończonej liczbie różnych wartości.
Szczególnym rodzajem procesów dyskretnych, które najliczniej występująw praktyce, są procesy binarne – procesy, do opisu którychwykorzystywane są wielkości dwustanowe (dwuwartościowe, binarne).
Przykłady to: obróbka materiałów, montaż, dozowanie, pakowanie.
dr inż. Jakub Możaryn Podstawy Automatyki
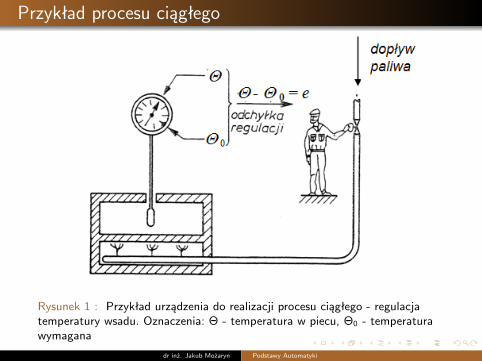
Przykład procesu ciągłego
Rysunek 1 : Przykład urządzenia do realizacji procesu ciągłego - regulacjatemperatury wsadu. Oznaczenia: Θ - temperatura w piecu, Θ0 - temperaturawymagana
dr inż. Jakub Możaryn Podstawy Automatyki
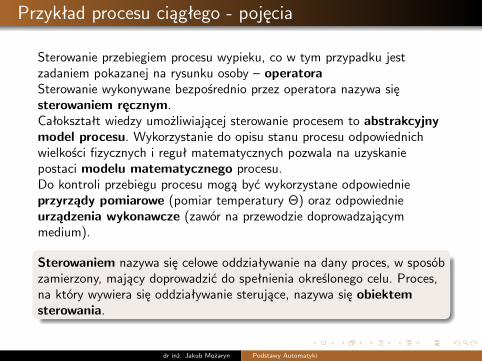
Przykład procesu ciągłego - pojęcia
Sterowanie przebiegiem procesu wypieku, co w tym przypadku jestzadaniem pokazanej na rysunku osoby – operatoraSterowanie wykonywane bezpośrednio przez operatora nazywa sięsterowaniem ręcznym.Całokształt wiedzy umożliwiającej sterowanie procesem to abstrakcyjnymodel procesu. Wykorzystanie do opisu stanu procesu odpowiednichwielkości fizycznych i reguł matematycznych pozwala na uzyskaniepostaci modelu matematycznego procesu.Do kontroli przebiegu procesu mogą być wykorzystane odpowiednieprzyrządy pomiarowe (pomiar temperatury Θ) oraz odpowiednieurządzenia wykonawcze (zawór na przewodzie doprowadzającymmedium).
Sterowaniem nazywa się celowe oddziaływanie na dany proces, w sposóbzamierzony, mający doprowadzić do spełnienia określonego celu. Proces,na który wywiera się oddziaływanie sterujące, nazywa się obiektemsterowania.
dr inż. Jakub Możaryn Podstawy Automatyki
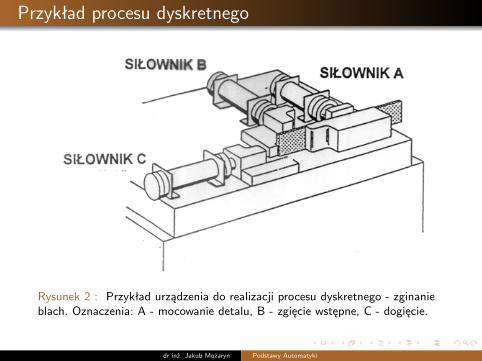
Przykład procesu dyskretnego
Rysunek 2 : Przykład urządzenia do realizacji procesu dyskretnego - zginanieblach. Oznaczenia: A - mocowanie detalu, B - zgięcie wstępne, C - dogięcie.
dr inż. Jakub Możaryn Podstawy Automatyki
Rozwój automatyki - rys historyczny
Starożytność - zegar wodny (wodna klepsydra) Ktesibiosa zAleksandrii (III w. p.n.e.), maszyny Herona (I w. n.e.).
Średniowiecze - Automatyczne lalki naśladujące ruch człowieka
Rozwój przemysłu w XVIII w. - zapotrzebowanie na urządzenianapędowe do kopalń, warsztatów tkackich, zakładów obróbki metali idrewna - budowa silnika parowego (Iwan Połzunow, James Watt,XVIII w.), silnika spalinowego i silnika elektrycznego (XIX w.).
Rozwój przemysłu w XIX w. - automatyczny warsztat tkacki (JosephJacquard, 1804 r.), automaty tokarskie, etc.
Początek XX wieku - nowe metody organizacji produkcji, tzw. taśmaprodukcyjna (Henry Ford, ok. 1913 r.).
II Wojna Światowa - metody projektowania układówautomatycznego sterowania i serwomechanizmów.
XX wiek - projekt Manhattan, zimna wojna, misje kosmiczne
dr inż. Jakub Możaryn Podstawy Automatyki

Automatyka - stan obecny
Szczególne znaczenie dla rozwoju współczesnej automatyki miałowynalezienie mikroprocesora i rozwój techniki komputerowej,informatyki, środków przekazywania i przetwarzania informacji oraznowoczesnych metod pomiarowych. Stała się możliwa automatyzacjazłożonych procesów, ciągów technologicznych i zakładów przemysłowych.Jest to tzw. automatyzacja kompleksowa.
Rysunek 3 : Synoptyka monitora stacji operatorskiej komputerowego układusterowania blokiem reaktorów w instalacji petrochemicznej.
dr inż. Jakub Możaryn Podstawy Automatyki
Pojęcia podstawowe, c.d.
W układach automatyki mamy do czynienia z przesyłaniem sygnałów.
Sygnał
Abstrakcyjny model dowolnej mierzalnej wielkości zmieniającej się wczasie, generowanej przez zjawiska fizyczne lub systemy.
Z jednej strony, w zależności od miejsca w procesie, sygnał może byćsygnałem wejściowym, wyjściowym procesu, itd. Z drugiej strony, biorącpod uwagę naturę fizyczną sygnału, sygnał może być sygnałemnapięciowym, prądowym, ciśnieniowym, cyfrowym, itd.
Zakłócenie
Czynniki o charakterze przypadkowym, niezamierzonym,niekontrolowanym, utrudniające sterowanie nazywa się zakłóceniami.
dr inż. Jakub Możaryn Podstawy Automatyki
Układ sterowania i układ regulacji
Układ automatyki
Zespół wzajemnie powiązanych elementów biorących udział w sterowaniuautomatycznym danego procesu (uporządkowany zgodnie z kierunkiemprzekazywania sygnałów).
W układach automatyki wyróżnia się otwarty układ sterowania zwanyteż układem sterowania i zamknięty układ sterowania nazywanyukładem regulacji automatycznej lub układem regulacji
Podstawowa różnica między tymi układami polega na tym, że układregulacji jest szczególnym przypadkiem układu sterowania - posiadasprzężenie zwrotne, tzn. występuje sprzężenie od wyjścia układu dosterownika.
dr inż. Jakub Możaryn Podstawy Automatyki
Układ sterowania
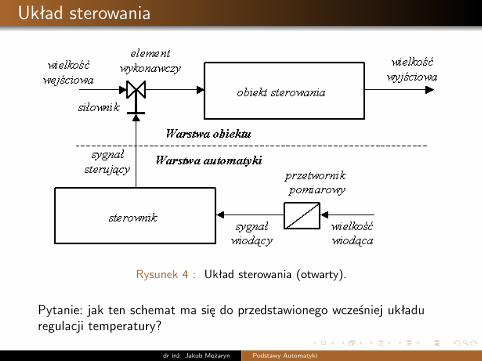
Rysunek 4 : Układ sterowania (otwarty).
Pytanie: jak ten schemat ma się do przedstawionego wcześniej układuregulacji temperatury?
dr inż. Jakub Możaryn Podstawy Automatyki
Układ sterowania - schemat blokowy
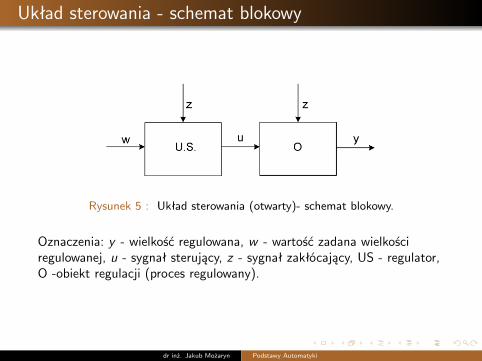
Rysunek 5 : Układ sterowania (otwarty)- schemat blokowy.
Oznaczenia: y - wielkość regulowana, w - wartość zadana wielkościregulowanej, u - sygnał sterujący, z - sygnał zakłócający, US - regulator,O -obiekt regulacji (proces regulowany).
dr inż. Jakub Możaryn Podstawy Automatyki
Układ regulacji
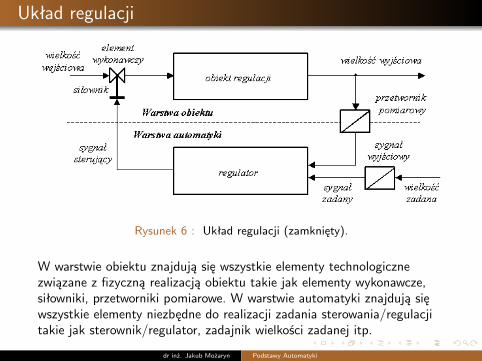
Rysunek 6 : Układ regulacji (zamknięty).
W warstwie obiektu znajdują się wszystkie elementy technologicznezwiązane z fizyczną realizacją obiektu takie jak elementy wykonawcze,siłowniki, przetworniki pomiarowe. W warstwie automatyki znajdują sięwszystkie elementy niezbędne do realizacji zadania sterowania/regulacjitakie jak sterownik/regulator, zadajnik wielkości zadanej itp.
dr inż. Jakub Możaryn Podstawy Automatyki
Układ regulacji - schemat blokowy
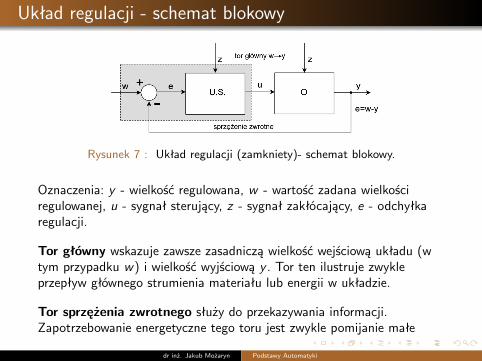
Rysunek 7 : Układ regulacji (zamkniety)- schemat blokowy.
Oznaczenia: y - wielkość regulowana, w - wartość zadana wielkościregulowanej, u - sygnał sterujący, z - sygnał zakłócający, e - odchyłkaregulacji.
Tor główny wskazuje zawsze zasadniczą wielkość wejściową układu (wtym przypadku w) i wielkość wyjściową y . Tor ten ilustruje zwykleprzepływ głównego strumienia materiału lub energii w układzie.
Tor sprzężenia zwrotnego służy do przekazywania informacji.Zapotrzebowanie energetyczne tego toru jest zwykle pomijanie małe
dr inż. Jakub Możaryn Podstawy Automatyki
SygnałySygnał
Abstrakcyjny model dowolnej mierzalnej wielkości zmieniającej się wczasie, generowanej przez zjawiska fizyczne lub systemy. Sygnałcharakteryzują treści fizyczne oraz parametr informacji.
Treść fizyczna
Treść fizyczna sygnału określa rodzaj wielkości fizycznej jaką jest tensygnał, np. ciśnienie sprężonego powietrza.
Parametr informacji
Parametr informacji określa sposób przenoszenia informacji oraz wartośćsygnału lub zakres zmian, np. chwilowa wartość sygnału ciśnieniowegohydraulicznego - 1600 kPa.
Sygnał analogowy
Sygnał analogowy charakteryzuje się tym, że wartości wielkościsygnalizowanej są jednoznacznie i w sposób ciągły odwzorowywane nawartości parametru informacji. Sygnał może być ciągły i nieciągły.
Sygnał dyskretny
Sygnał dyskretny charakteryzuje się określoną liczbą dyskretnych wartościparametru informacji. Szczególnym przypadkiem sygnałów dyskretnych sąsygnały binarne – (0,1).
dr inż. Jakub Możaryn Podstawy Automatyki
Sygnały analogowe - ciągłe i zdyskretyzowane w czasie
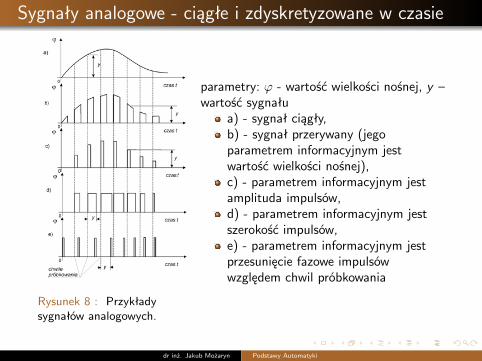
Rysunek 8 : Przykładysygnałów analogowych.
parametry: ϕ - wartość wielkości nośnej, y –wartość sygnału
a) - sygnał ciągły,b) - sygnał przerywany (jegoparametrem informacyjnym jestwartość wielkości nośnej),c) - parametrem informacyjnym jestamplituda impulsów,d) - parametrem informacyjnym jestszerokość impulsów,e) - parametrem informacyjnym jestprzesunięcie fazowe impulsówwzględem chwil próbkowania
dr inż. Jakub Możaryn Podstawy Automatyki
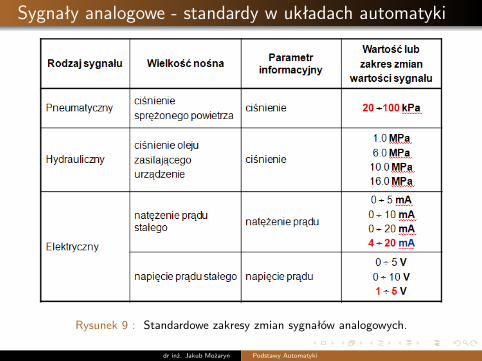
Sygnały analogowe - standardy w układach automatyki
Rysunek 9 : Standardowe zakresy zmian sygnałów analogowych.
dr inż. Jakub Możaryn Podstawy Automatyki
Klasyfikacja układów automatyki
Podział ze względu na obiekt regulacji
Ciągłe układy regulacji - obiekt regulacji jest procesem ciągłym,trwa cały czas, np. układ regulacji temperatury w budynku.
Dyskretne układy regulacji - obiekt regulacji jest procesemdyskretnym, trwa w wyraźnie określonych momentach, np. zprzerwami, jak proces montażu elementów samochodu.
dr inż. Jakub Możaryn Podstawy Automatyki
Klasyfikacja układów automatyki
Podział ze względu na zadanie regulacji
Układy stabilizujące - układy regulacji stałowartościowej gdziecelem jest zapewnienie stabilności układu zamkniętego. Częstododatkowo wymaga się aby oprócz stabilności błąd regulacji mieściłsię w dopuszczalnym przedziale, a przebiegi przejściowe układuposiadały pewne zadane własności. Przykład: układ regulacjiciśnienia w zbiorniku.
Układy programowe - układy regulacji, w których przebieg wartościzadanej w czasie jest z góry określony. Przykład: proces regulacjitemperatury w piecu hartowniczym.
Układy nadążne (serwomechanizmy) - układy regulacji, w którychsygnał zadany jest nieznaną funkcją czasu, zmieniającą się w trakcieprocesu regulacji. Przykład: układ sterujący baterią słonecznąśledzący położenie słońca.
Układy ekstremalne - układy regulacji, których zadaniem jestutrzymywanie wielkości wyjściowej obiektu regulacji na wartościekstremalnej (minimum lub maksimum). Przykład: układ regulacjiczystości spalin w elektrociepłowniach.
dr inż. Jakub Możaryn Podstawy Automatyki
Klasyfikacja układów automatyki
Podział ze względu na sposób działania elementów układu
Układy o działaniu ciągłym - wszystkie elementy układu działająw sposób ciągły w czasie i mogą przyjmować w sposób ciągływartości. W takim układzie wszystkie sygnały występują cały czasbez przerwy i mogą przyjmować wszystkie wartości w normalnymprzedziale pracy. Przykładem układu regulacji ciągłej jest np. układregulacji poziomu wody w zbiorniku z regulatorem ciągłym, np. typuPID. Układy takie potocznie są nazywane układami ciągłymi.
Układy o działaniu dyskretnym - układy w których jeden lubwięcej elementów działa w sposób dyskretny w czasie lub możeprzyjmować tylko niektóre wartości. Można wyróżnić w tej grupieukłady przekaźnikowe i układy impulsowe (z modulacją amplitudylub czasu trwania impulsu). Przykładem układu przekaźnikowegomoże być dwustanowy układ regulacji temperatury w żelazku, aukładu impulsowego układ regulacji komputerowej - w pierwszymwymienionym przykładzie obiekt regulacji jest procesem ciągłym, aw drugim może być procesem ciągłym lub dyskretnym. Układy takiepotocznie są nazywane układami dyskretnymi.
dr inż. Jakub Możaryn Podstawy Automatyki

Klasyfikacja układów automatyki
Podział ze względu na liniowość elementów układu
Układy liniowe - układy, w których występują tylko elementyliniowe, tzn. elementy opisane funkcjami jednorodnymi,spełniającymi zasadę superpozycji. Układy te są opisywanerównaniami różniczkowymi lub różnicowymi.
Układy nieliniowe - układy, w których występuje jeden lub więcejelementów nieliniowych, tzn. element nie spełniający zasadysuperpozycji. Wówczas cały układ nie spełnia zasady superpozycji ijest układem nieliniowym.
W istocie rzeczy w każdym układzie występują elementy nieliniowe. Jeżelijednak można je w obszarze pracy z wystarczająco dobrym przybliżeniemprzedstawić jako elementy liniowe to układ taki nazywamy układemliniowym.
dr inż. Jakub Możaryn Podstawy Automatyki
Klasyfikacja układów automatyki
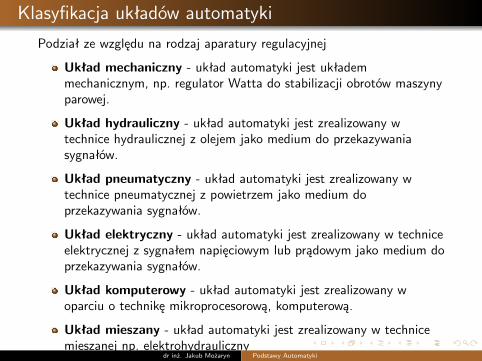
Podział ze względu na rodzaj aparatury regulacyjnej
Układ mechaniczny - układ automatyki jest układemmechanicznym, np. regulator Watta do stabilizacji obrotów maszynyparowej.
Układ hydrauliczny - układ automatyki jest zrealizowany wtechnice hydraulicznej z olejem jako medium do przekazywaniasygnałów.
Układ pneumatyczny - układ automatyki jest zrealizowany wtechnice pneumatycznej z powietrzem jako medium doprzekazywania sygnałów.
Układ elektryczny - układ automatyki jest zrealizowany w techniceelektrycznej z sygnałem napięciowym lub prądowym jako medium doprzekazywania sygnałów.
Układ komputerowy - układ automatyki jest zrealizowany woparciu o technikę mikroprocesorową, komputerową.
Układ mieszany - układ automatyki jest zrealizowany w technicemieszanej np. elektrohydrauliczny
dr inż. Jakub Możaryn Podstawy Automatyki
Klasyfikacja układów automatyki
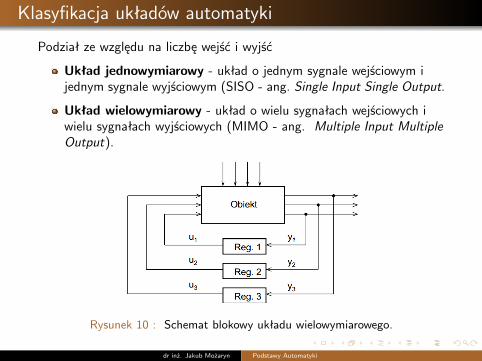
Podział ze względu na liczbę wejść i wyjść
Układ jednowymiarowy - układ o jednym sygnale wejściowym ijednym sygnale wyjściowym (SISO - ang. Single Input Single Output.
Układ wielowymiarowy - układ o wielu sygnałach wejściowych iwielu sygnałach wyjściowych (MIMO - ang. Multiple Input MultipleOutput).
Rysunek 10 : Schemat blokowy układu wielowymiarowego.
dr inż. Jakub Możaryn Podstawy Automatyki
Rysunek techniczny układu automatyki
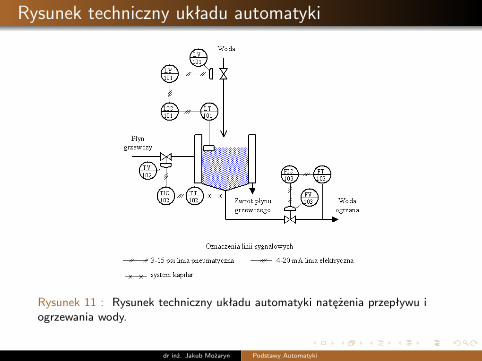
Rysunek 11 : Rysunek techniczny układu automatyki natężenia przepływu iogrzewania wody.
dr inż. Jakub Możaryn Podstawy Automatyki
Rysunek techniczny układu automatyki
W różnych krajach opracowano różne, aczkolwiek podobne standardydotyczące przygotowania rysunków technicznych układów automatyki.
Standardy te są ujęte w normach europejskich, a w USA są zawarte wnormie ANSI/ISA-S5.1-1984.
W układzie automatyki na rysunku występują 3 obwody automatykioznaczone numerami:
101 - układ regulacji poziomu wody w zbiorniku,
102 - układ regulacji temperatury wody,
103 - układ regulacji natężenia wypływu wody ze zbiornika.
Wykaz oznaczeń literowych, pierwsza litera: T - temperatura, L - poziom,F - natężenie przepływu, pozostałe litery: C - regulator, I - wskaźnik, R -rejestrator, T - przetwornik, V - zawór.
dr inż. Jakub Możaryn Podstawy Automatyki
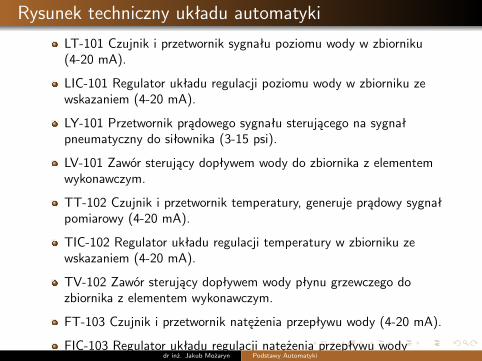
Rysunek techniczny układu automatyki
LT-101 Czujnik i przetwornik sygnału poziomu wody w zbiorniku(4-20 mA).
LIC-101 Regulator układu regulacji poziomu wody w zbiorniku zewskazaniem (4-20 mA).
LY-101 Przetwornik prądowego sygnału sterującego na sygnałpneumatyczny do siłownika (3-15 psi).
LV-101 Zawór sterujący dopływem wody do zbiornika z elementemwykonawczym.
TT-102 Czujnik i przetwornik temperatury, generuje prądowy sygnałpomiarowy (4-20 mA).
TIC-102 Regulator układu regulacji temperatury w zbiorniku zewskazaniem (4-20 mA).
TV-102 Zawór sterujący dopływem wody płynu grzewczego dozbiornika z elementem wykonawczym.
FT-103 Czujnik i przetwornik natężenia przepływu wody (4-20 mA).
FIC-103 Regulator układu regulacji natężenia przepływu wodywypływającej ze zbiornika (4-20 mA).
FV-103 Zawór sterujący natężeniem przepływu wody.
dr inż. Jakub Możaryn Podstawy Automatyki
Struktura przyrządowa układu automatyki
Występujące w układach automatycznego sterowania (regulacji)urządzenia można podzielić, ze względu na pełnione funkcje, na:
obiekty sterowania (regulacji),
urządzenia pomiarowe i diagnostyczne,
urządzenia przetwarzające sygnały,
urządzenia sygnalizacji i rejestracji,
urządzenia generujące sygnały sterujące (w ukł. regulacji są toregulatory),
urządzenia wykonawcze służące do wprowadzania zmian strumienimateriałów lub energii do obiektów regulacji pod wpływem sygnałówsterujących,
osprzęt
dr inż. Jakub Możaryn Podstawy Automatyki
Struktura przyrządowa układu automatyki
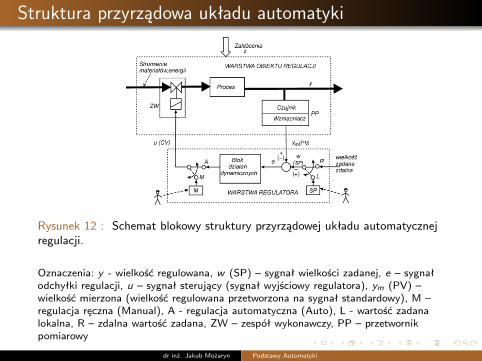
Rysunek 12 : Schemat blokowy struktury przyrządowej układu automatycznejregulacji.
Oznaczenia: y - wielkość regulowana, w (SP) – sygnał wielkości zadanej, e – sygnałodchyłki regulacji, u – sygnał sterujący (sygnał wyjściowy regulatora), ym (PV) –wielkość mierzona (wielkość regulowana przetworzona na sygnał standardowy), M –regulacja ręczna (Manual), A - regulacja automatyczna (Auto), L - wartość zadanalokalna, R – zdalna wartość zadana, ZW – zespół wykonawczy, PP – przetwornikpomiarowy
dr inż. Jakub Możaryn Podstawy Automatyki
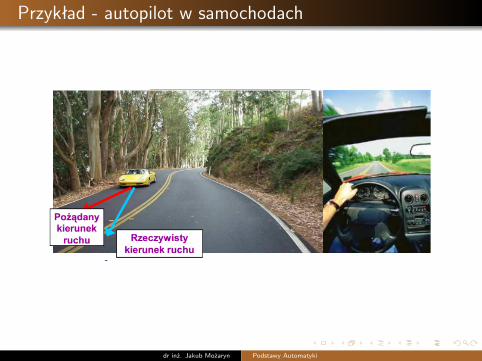
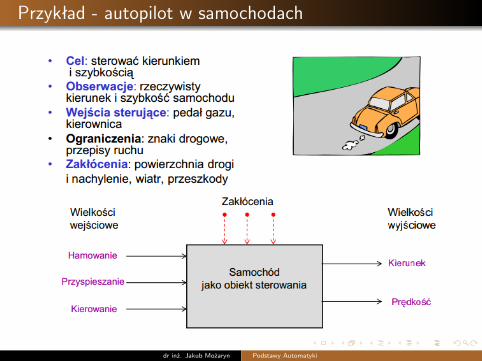
Przykład - autopilot w samochodach
dr inż. Jakub Możaryn Podstawy Automatyki
Przykład - autopilot w samochodach
dr inż. Jakub Możaryn Podstawy Automatyki

Przykład - autopilot w samochodach
dr inż. Jakub Możaryn Podstawy Automatyki

Przykład - autopilot w samochodach
dr inż. Jakub Możaryn Podstawy Automatyki

Przykład - autopilot w samochodach
dr inż. Jakub Możaryn Podstawy Automatyki
Przykład - zawody DARPA Challenge, USA
dr inż. Jakub Możaryn Podstawy Automatyki
Podstawy Automatyki
Wykład 1 - pojęcia podstawowe i klasyfikacja układów automatyki
dr inż. Jakub Możaryn
Instytut Automatyki i Robotyki, Wydział Mechatroniki PW
Warszawa, 2016
dr inż. Jakub Możaryn Podstawy Automatyki






![[Sińczak] - Procesy Przeróbki Plastycznej.pdf](https://static.fdocuments.pl/doc/165x107/55cf9b55550346d033a5a5e4/sinczak-procesy-przerobki-plastycznejpdf.jpg)