Physics 111 Lecture 10 Torque, Energy, Rolling SJ 8th Ed ...janow/Physics 111 Spring 2012... ·...
25
Copyright R. Janow – Spring 2012 Physics 111 Lecture 10 Torque, Energy, Rolling SJ 8th Ed.: Chap 10.6 – 10.9 • Recap and Overview • Torque • Newton’s Second Law for Rotation • Energy Considerations in Rotational Motion • Rolling • Energy Methods • Second Law Applications 10.6 Torque 10.7 The Rigid Body Under a Net Torque (Rotational Second Law) 10.8 Energy Considerations in Rotational Motion (Work, Power, and Energy) 10.9 Rolling Motion of a Rigid Object (covers basics, energy methods, 2nd law problems) Add example 10.8, 10.11, 10.12
Transcript of Physics 111 Lecture 10 Torque, Energy, Rolling SJ 8th Ed ...janow/Physics 111 Spring 2012... ·...
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Physics 111 Lecture 10
Torque, Energy, Rolling
SJ 8th Ed.: Chap 10.6 –10.9
•Recap and Overview
•Torque
•Newton’s Second Law for Rotation
•Energy Considerations in Rotational Motion
•Rolling
•Energy Methods
•Second Law Applications
10
.6T
orq
ue
10
.7T
he
Rig
id B
od
y U
nd
er
a N
et
To
rqu
e
(Ro
tati
on
al
Sec
on
d L
aw
)
10
.8E
ne
rgy C
on
sid
era
tio
ns
in
Ro
tati
on
al
Mo
tio
n
(Wo
rk,
Po
we
r, a
nd
En
erg
y)
10
.9R
oll
ing
Mo
tio
n o
f a
Rig
id O
bje
ct
(co
ve
rs
ba
sic
s, en
erg
y m
eth
od
s,
2n
d l
aw
pro
ble
ms
)
Add
exa
mp
le 1
0.8
, 10
.11
, 10
.12
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
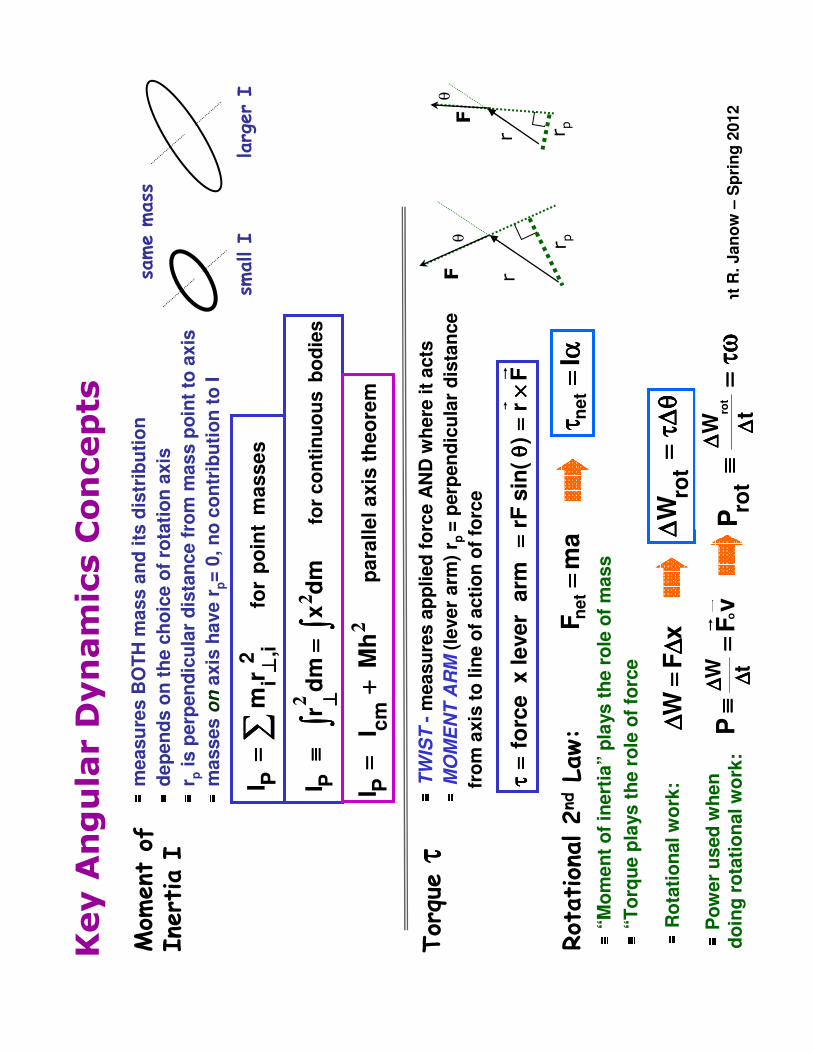
Mom
ent
of
Ine
rtia
I
measu
res B
OT
H m
ass a
nd
its
dis
trib
uti
on
dep
en
ds o
n t
he c
ho
ice o
f ro
tati
on
axis
r pis
perp
en
dic
ula
r d
ista
nce f
rom
mass p
oin
t to
axis
masses o
naxis
have r
p=
0, n
o c
on
trib
uti
on
to
I
m
as
se
s
po
int
fo
r2
i,i
P
rm
I ∑ ∑∑∑
⊥ ⊥⊥⊥= ===
sam
e m
ass
small I
larg
er
I
“M
om
en
t o
f in
ert
ia”
pla
ys t
he r
ole
of
mass
“T
orq
ue p
lays t
he r
ole
of
forc
e
Rot
ati
onal 2
ndLaw:
I
ne
tα ααα
= ===τ τττ
ma
F net= ===
Ro
tati
on
al w
ork
:
Po
wer
used
wh
en
d
oin
g r
ota
tio
nal w
ork
:
θ θθθ∆ ∆∆∆τ τττ
= ===∆ ∆∆∆
rot
Wx
FW
∆ ∆∆∆= ===
∆ ∆∆∆
Pt
W
rot
rot
τω τωτω
τω= ===
≡ ≡≡≡∆ ∆∆∆
∆ ∆∆∆v
FP
o
tW= ===
≡ ≡≡≡∆ ∆∆∆∆ ∆∆∆
Tor
que τ τττ
TW
IST
-m
easu
res a
pp
lied
fo
rce A
ND
wh
ere
it
acts
MO
ME
NT
AR
M(l
ever
arm
) r p
= p
erp
en
dic
ula
r d
ista
nce
fro
m a
xis
to
lin
e o
f acti
on
of
forc
e
Fr
)sin
(rF
arm
le
ver
x
forc
e
× ×××= ===
θ θθθ= ===
= ===τ τττ
F
r p
r
θF
r pr
θ
Key Angular Dynamics Concepts
bo
die
s
co
nti
nu
ou
s
for
P
dm
xd
mr
I
∫ ∫∫∫∫ ∫∫∫
= ===≡ ≡≡≡
⊥ ⊥⊥⊥
22
the
ore
m
ax
is
pa
rall
el
c
mP
M
h
I
I2
+ +++= ===
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
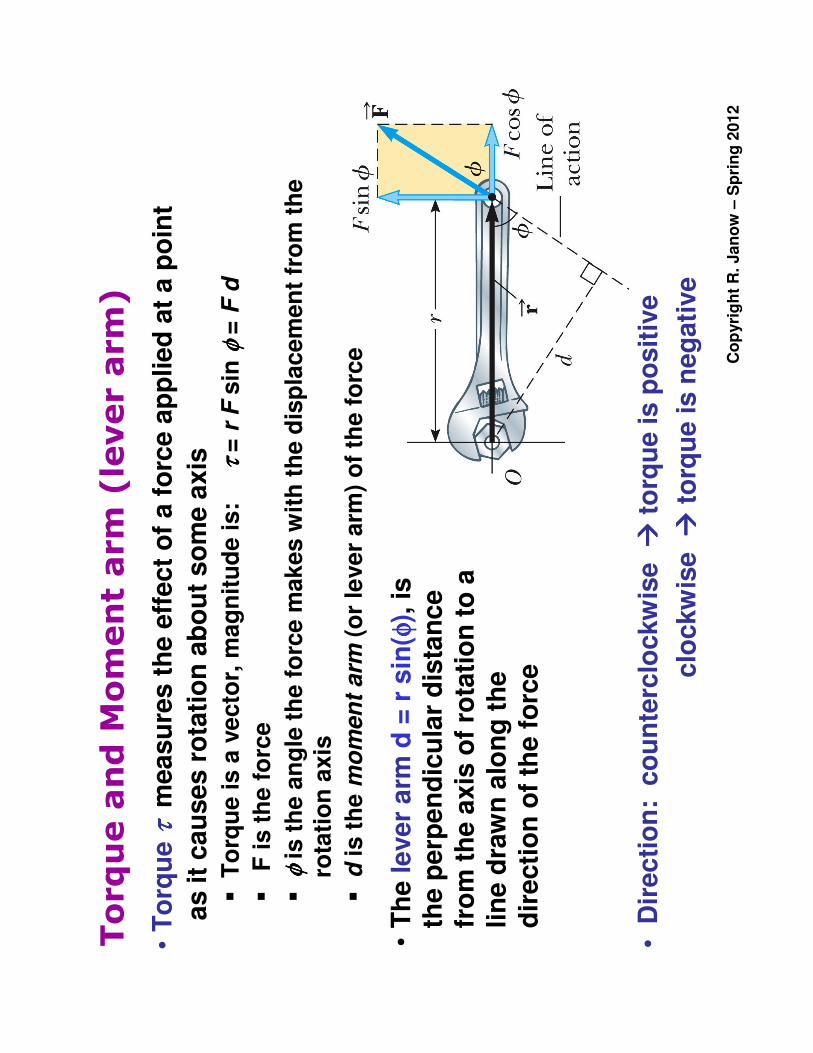
Torque and Moment arm (lever arm)
•T
he lever
arm
d =
r s
in(φ φφφ
), is
the p
erp
en
dic
ula
r d
ista
nce
fro
m t
he a
xis
of
rota
tio
n t
o a
lin
e d
raw
n a
lon
g t
he
dir
ecti
on
of
the f
orc
e
•T
orq
ue τ τττ
measu
res t
he e
ffect
of
a f
orc
e a
pp
lied
at
a p
oin
t
as it
cau
ses r
ota
tio
n a
bo
ut
so
me a
xis
�T
orq
ue i
s a
ve
cto
r, m
ag
nit
ud
e i
s:
τ τττ=
r F
sin
φ φφφ=
F d
�F
is t
he f
orc
e
�φ φφφ
is t
he a
ng
le t
he f
orc
e m
ak
es w
ith
th
e d
isp
lacem
en
t fr
om
th
e
rota
tio
n a
xis
�d
is t
he m
om
en
t arm
(or
lever
arm
) o
f th
e f
orc
e
•D
irecti
on
: c
ou
nte
rclo
ckw
ise � ���
torq
ue is p
osit
ive
clo
ckw
ise � ���
torq
ue is n
eg
ati
ve
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
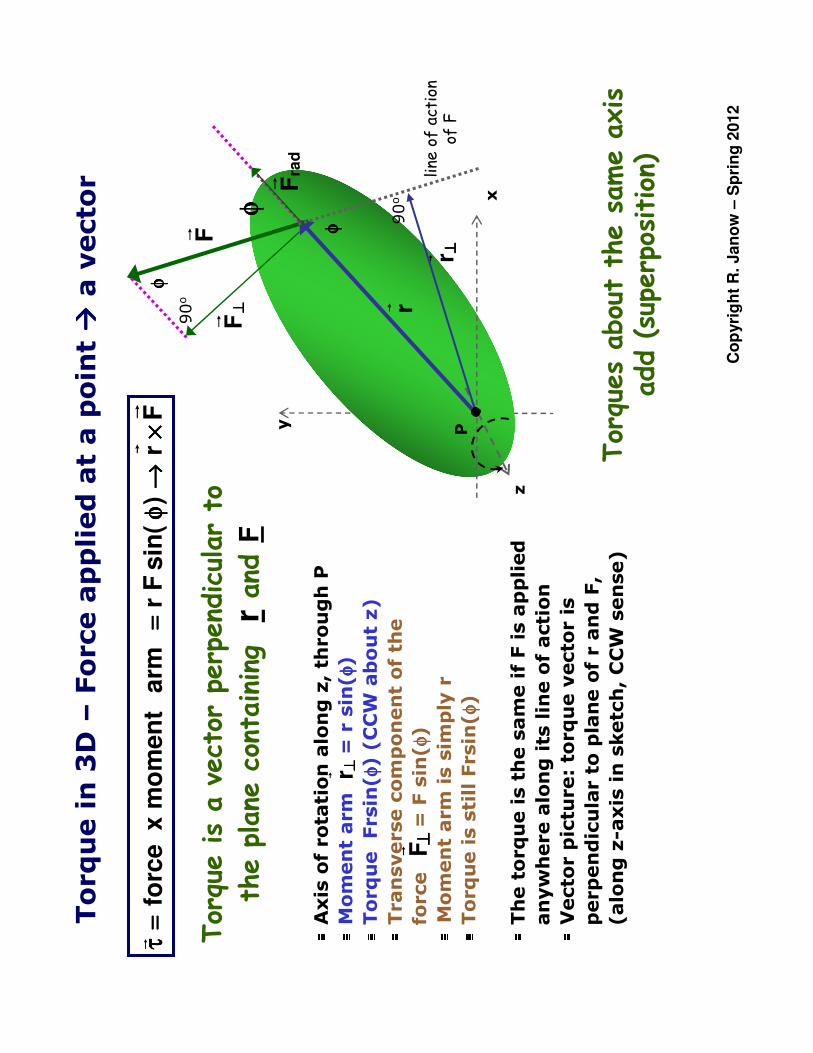
Torque in 3D –Force applied at a point � ���a vector
x
y
z
φ φφφ
⊥ ⊥⊥⊥r
⊥ ⊥⊥⊥F
rad
F
r
φ φφφ
line
of
acti
on
of F
F
P
φ φφφ
90
o
90
o
Fr
)sin
(F r
arm
mo
men
t
x fo
rce
× ×××
→ →→→φ φφφ
= ==== ===
τ τττr
Axis of rotation along z, through P
Moment arm = r sin(
φ φφφ)
Torque Frsin(
φ φφφ) (CCW about z)
Transverse component of the
force = F sin(
φ φφφ)
Moment arm is simply r
Torque is still Frsin(
φ φφφ)
The torque is the same if F is applied
anywhere along its line of action
Vector picture: torque vector is
perpendicular to plane of r and F,
(along z-axis in sketch, CCW sense)
⊥ ⊥⊥⊥r
⊥ ⊥⊥⊥F
Tor
que is
a v
ect
or p
erp
end
icul
ar
to
the p
lane
con
tain
ing
rand
F
Tor
ques
abou
t th
e s
am
e a
xis
add (
supe
rpos
itio
n)
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
10.1
A c
on
sta
nt
no
n-z
ero
net
torq
ue i
s e
xert
ed
on
a w
heel.
W
hic
h o
f
the f
ollo
win
g q
uan
titi
es m
ust
be c
han
gin
g?
Effect of a Constant Net Torque
1.
an
gu
lar
po
sit
ion
2.
an
gu
lar
velo
cit
y
3.
an
gu
lar
accele
rati
on
4.
mo
men
t o
f in
ert
ia
5.
kin
eti
c e
nerg
y
6.
the m
ass c
en
ter
locati
on
A.
1, 2, 3
B.
4, 5, 6
C.
1,2, 5
D.
1, 2, 3, 4
E.
2, 3, 5
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
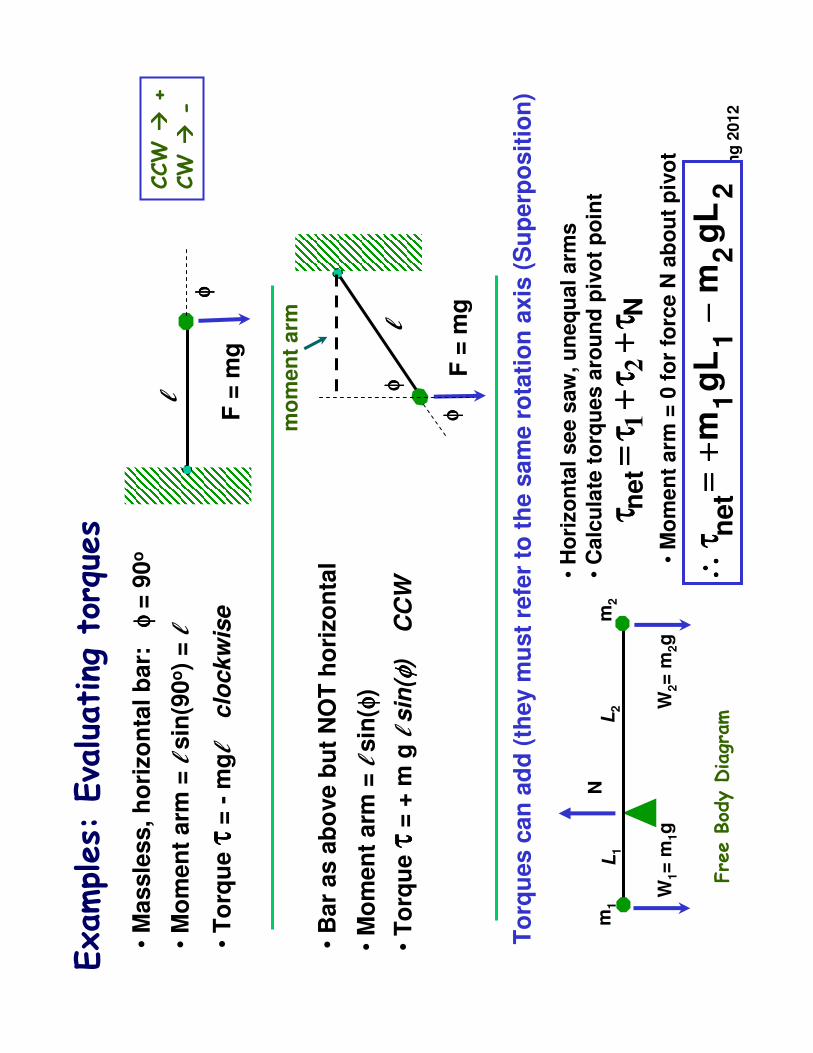
Exam
ples:
Eva
luati
ng t
orqu
es
•M
assle
ss,
ho
rizo
nta
l b
ar:
φ φφφ
= 9
0o
F =
mg
l
φ φφφ•
Mo
men
t arm
= l
sin
(90
o)
= l
•T
orq
ue τ τττ
= -
mgl
clo
ckw
ise
CCW
� ���+
CW
� ���-
•B
ar
as a
bo
ve b
ut
NO
T h
ori
zo
nta
l
•M
om
en
t arm
= l
sin
(φ φφφ)
•T
orq
ue τ τττ
= +
m g
lsin
(φ φφφ)
C
CW
F =
mg
l
φ φφφ
φ φφφ
mo
men
t arm
Fre
e B
ody D
iagr
am
To
rqu
es c
an
ad
d (
they m
ust
refe
r to
th
e s
am
e r
ota
tio
n a
xis
(S
up
erp
osit
ion
)
m1
m2
W1=
m1g
W2=
m2g
NL
2L
1
•H
ori
zo
nta
l see s
aw
, u
neq
ual arm
s
•C
alc
ula
te t
orq
ues a
rou
nd
piv
ot
po
int
Nn
et
τ τττ+ +++
τ τττ+ +++
τ τττ= ===
τ τττ2
1
•M
om
en
t arm
= 0
fo
r fo
rce
N a
bo
ut
piv
ot
L g
m
L g
m
2
2 1
1n
et
− −−−+ +++
= ===τ τττ
∴ ∴∴∴
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
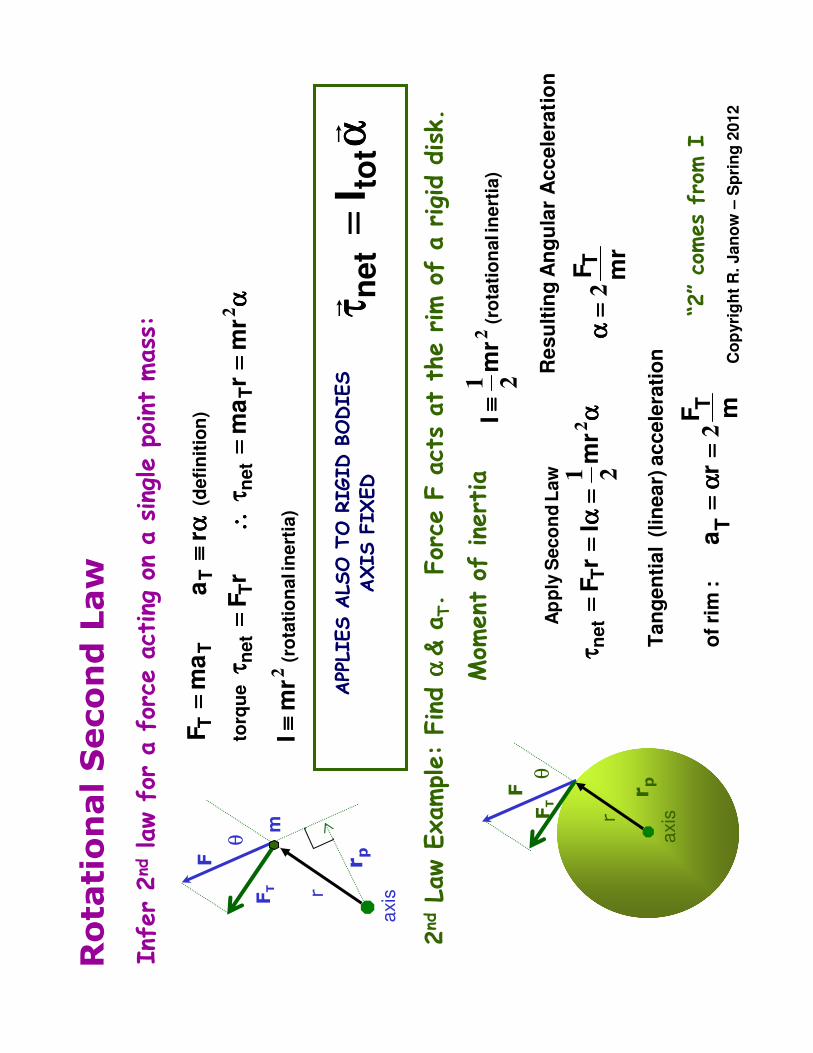
Rotational Second Law
F rp
r
θ
FT
axis
m
rF
T
net
to
rqu
e= ===
τ τττ
m
a
F
TT
= ===
n)
(defi
nit
io
T
ra
α ααα≡ ≡≡≡
α ααα= ===
= ===τ τττ
∴ ∴∴∴2
mr
rm
a
Tn
et
inert
ia)
l(r
ota
tio
na
m
rI
2≡ ≡≡≡
Inf
er
2nd
law f
or a
for
ce a
ctin
g on
a s
ingl
e p
oint
mass
:
2nd
Law E
xam
ple:
Fin
d α
α
α
α
& a
T.
For
ce F
act
s at
the r
im o
f a r
igid
dis
k.
F rp
r
θFT
axis
inert
ia)
l(r
ota
tio
na
m
rI
2
21≡ ≡≡≡ α ααα
= ===α ααα
= ==== ===
τ τττ2
21m
rI
rF
T
net
Law
S
eco
nd
p
ly
A
p
mr
FT
ion
Ac
ce
lera
t A
ng
ula
rR
es
ult
ing
2= ===
α ααα
mFr
aT
T
:ri
m
of
on
accele
rati
(l
inear)
T
an
gen
tial
2= ===
α ααα= ===
“2”
com
es
from
I
Mom
ent
of
inert
ia
α ααα= ===
τ τττ∴ ∴∴∴
I
ne
tα ααα
= ===τ τττ
rr
tot
net
IA
PPLIES A
LSO
TO
RIG
ID B
ODIES
AXIS F
IXED
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
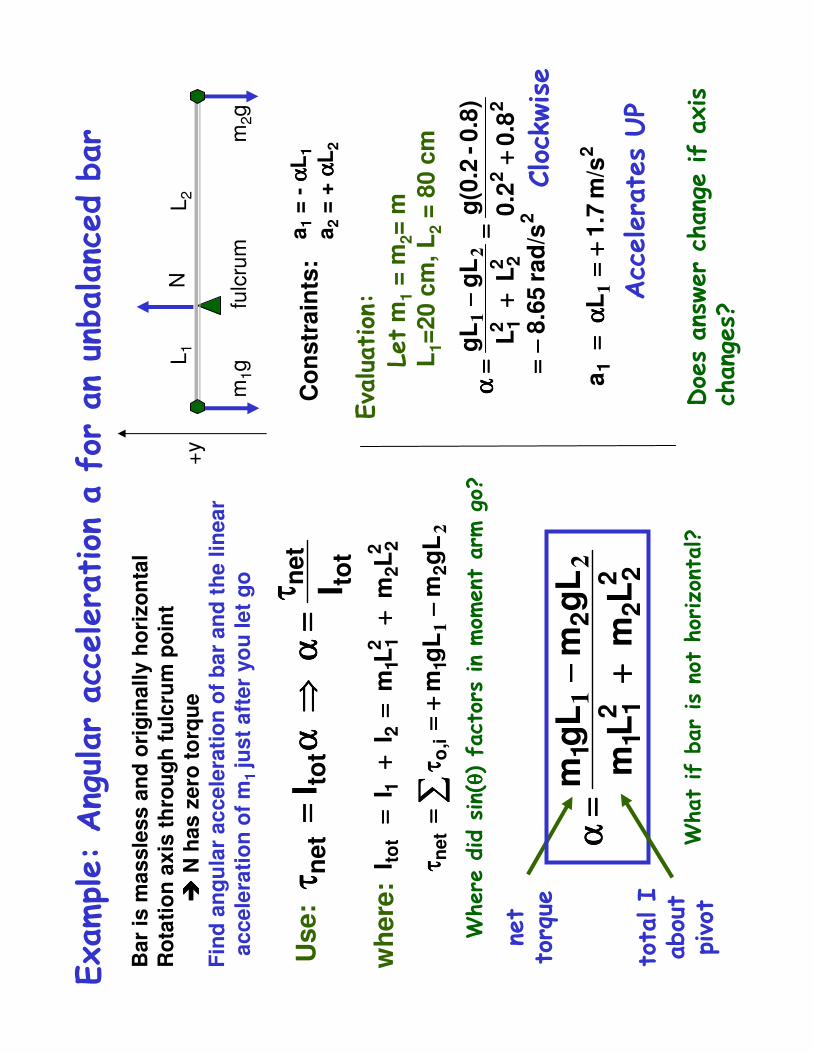
Exam
ple:
Ang
ular
acc
ele
rati
on a
for
an
unbala
nced b
ar
Bar
is m
assle
ss
an
d o
rig
ina
lly h
ori
zo
nta
l
Ro
tati
on
ax
is t
hro
ug
h f
ulc
rum
po
int
� ���N
has
zero
to
rqu
eF
ind
an
gu
lar
ac
cele
rati
on
of
ba
r an
d t
he l
inear
accele
rati
on
of
m1 ju
st
aft
er
yo
u le
t g
o
N
m1g
m2g
L2
L1
fulc
rum
+y
a1
= -
α αααL
1
a2
= +
α αααL
2
Co
nstr
ain
ts:
tot
net
tot
net
I
I
τ τττ= ===
α ααα⇒ ⇒⇒⇒
α ααα= ===
τ τττU
se:
2 22
2 11
21
tot
Lm
Lm
I
I
I
+ +++= ===
+ +++= ===
21
gL
m g
Lm
2
1i,
on
et
− −−−+ +++
= ===τ τττ
= ===τ τττ
∑ ∑∑∑
wh
ere
:
Where
did
sin
(θ θθθ)
fact
ors
in m
oment
arm
go?
net
torq
ue
tota
l I
abou
t
pivo
t
L
m
L
m
gL
m g
Lm
2 22
2 11
21
+ +++− −−−= ===
α ααα2
1
What
if b
ar
is n
ot h
oriz
onta
l?
Clo
ckwis
e
Acc
ele
rate
s U
P
Eva
luati
on:
Let
m1
= m
2=
m
L1=
20 c
m,
L2
= 8
0 c
m
2
22
2 22 1
rad
/s
8.6
5
0.8
0.2
0.8
)-
g(0
.2
L
L
gL
g
L
− −−−= ===
+ +++= ===
+ +++− −−−= ===
α ααα2
1
21
m/s
1
.7
L
a
+ +++= ===
α ααα= ===
1
Doe
s ans
wer
chang
e if
axis
chang
es?
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
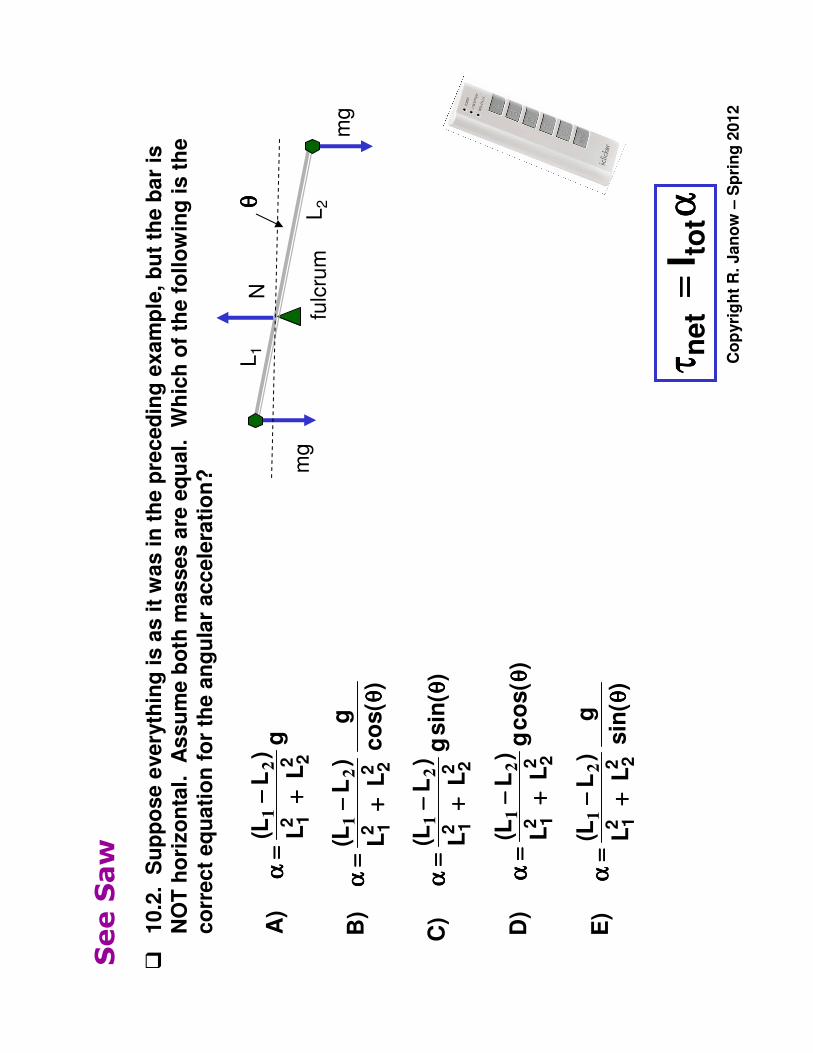
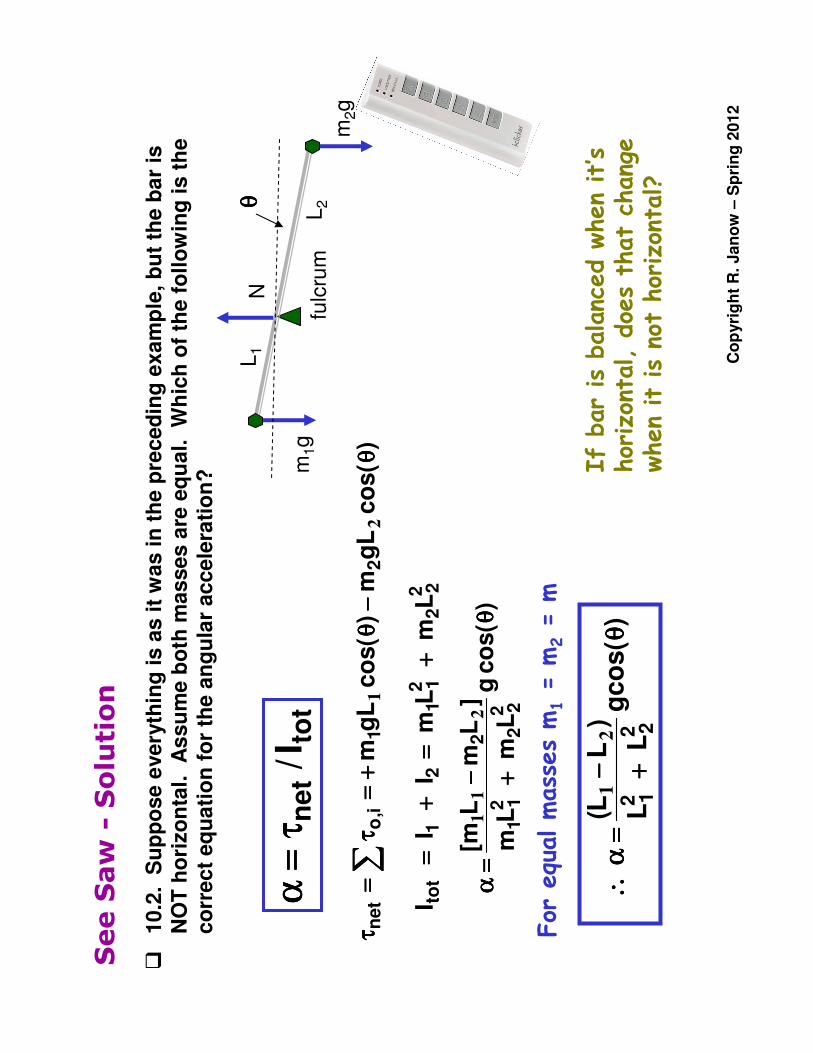
�10.2
. S
up
po
se
every
thin
g i
s a
s i
t w
as in
th
e p
reced
ing
exam
ple
,b
ut
the b
ar
is
NO
T h
ori
zo
nta
l.
As
su
me b
oth
masses a
re e
qu
al.
Wh
ich
of
the f
oll
ow
ing
is t
he
co
rrect
eq
ua
tio
n f
or
the
an
gu
lar
accele
rati
on
?
See Saw
N
mg
L2
L1
fulc
rum
mg
θ θθθ α ααα= ===
τ τττto
tn
et
I
g L
L
)L
L(
A)
2 22 1
+ +++− −−−= ===
α ααα2
1
)sin
(g
L
L
)L
L(
C)
2 22 1
θ θθθ+ +++− −−−
= ===α ααα
21
)co
s(
g L
L
)L
L(
D)
2 2
2 1
θ θθθ+ +++− −−−
= ===α ααα
21
)sin
(g
L
L
)L
L(
E)
2 2
2 1θ θθθ
+ +++− −−−= ===
α ααα2
1
)co
s(
g
L
L
)L
L(
B)
2 2
2 1θ θθθ
+ +++− −−−= ===
α ααα2
1
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
�10.2
. S
up
po
se
every
thin
g i
s a
s i
t w
as in
th
e p
reced
ing
exam
ple
,b
ut
the b
ar
is
NO
T h
ori
zo
nta
l.
As
su
me b
oth
masses a
re e
qu
al.
Wh
ich
of
the f
oll
ow
ing
is t
he
co
rrect
eq
ua
tio
n f
or
the
an
gu
lar
accele
rati
on
?
See Saw -Solution
N
m2g
L2
L1
fulc
rum
m1g
θ θθθ
tot
ne
tI/
τ τττ= ===
α ααα
2 22
2 11
21
tot
Lm
Lm
I
I
I
+ +++= ===
+ +++= ===
)co
s(
gL
m )
co
s(
gL
m
21
i,o
net
θ θθθ− −−−
θ θθθ+ +++
= ===τ τττ
= ===τ τττ
∑ ∑∑∑2
1
)co
s(
g
Lm
Lm
]L
m L
m[
2 2
22 1
1
2θ θθθ
+ +++− −−−= ===
α ααα2
11
For
equ
al m
ass
es
m1
= m
2= m )
gc
os
(
L
L
)L
L(
2 2
2 1
θ θθθ+ +++− −−−
= ===α ααα
∴ ∴∴∴2
1If
bar
is b
ala
nced w
hen
it’s
hor
izon
tal, d
oes
that
chang
e
when
it is
not
hor
izon
tal?
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
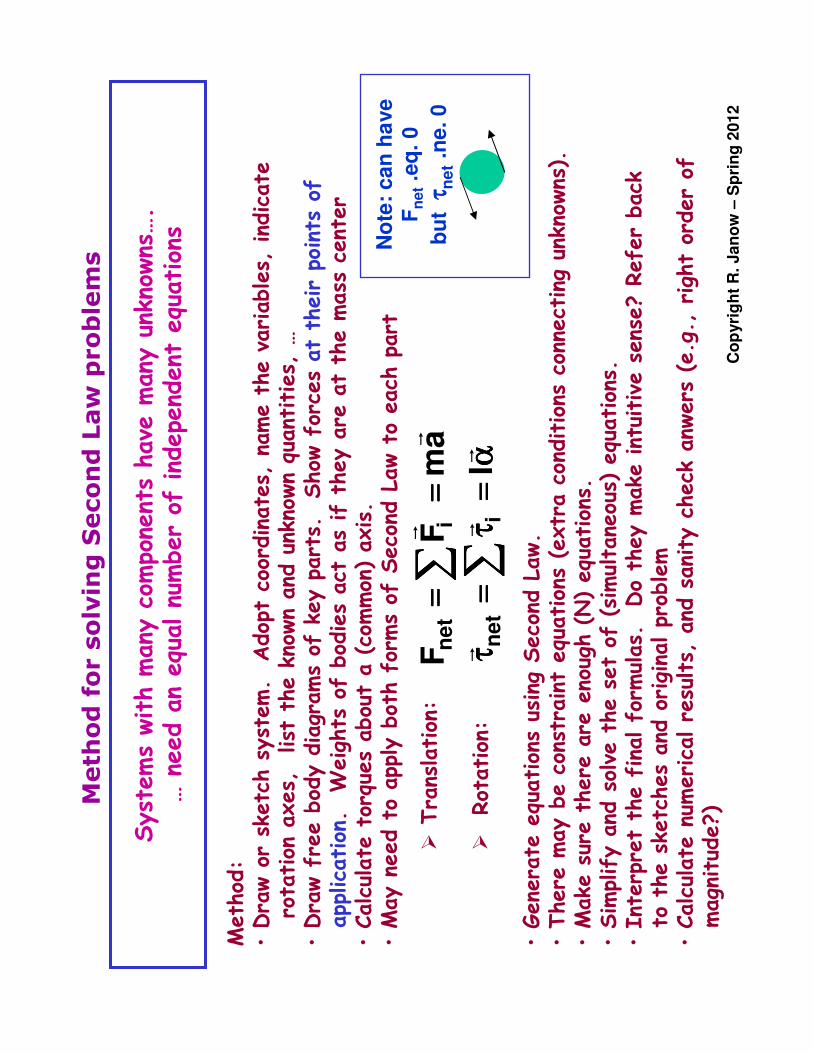
Method for solving Second Law problems
Syst
em
s wit
h m
any
com
pone
nts
have
many
unk
nowns
….
…ne
ed a
n equ
al nu
mber
of ind
epe
ndent
equ
ati
ons
Meth
od:
•Dra
w o
r sk
etc
h s
yst
em
. A
dop
t co
ordin
ate
s, n
am
e t
he v
ari
able
s, ind
icate
rota
tion
axes,
list
the k
nown
and
unk
nown
quant
itie
s, …
•Dra
w f
ree b
ody d
iagr
am
s of
key p
art
s.
Show
for
ces
at
their
poi
nts
ofapp
lica
tion
. W
eig
hts
of
bod
ies
act
as
if t
hey a
re a
t th
e m
ass
cent
er
•Calc
ulate
tor
ques
abou
t a (
com
mon
) axis
.•
May n
eed t
o app
ly b
oth f
orm
s of
Seco
nd L
aw t
o each
part
�Tra
nsla
tion
:
�Rot
ati
on:
•Gene
rate
equ
ati
ons
usin
g Seco
nd L
aw.
•There
may b
e c
onst
rain
t equ
ati
ons
(extr
a c
ondit
ions
con
nect
ing
unkno
wns
).•
Make s
ure t
here
are
eno
ugh (
N)
equ
ati
ons.
•
Sim
plif
y a
nd s
olve
the s
et
of (
sim
ulta
neou
s) e
quati
ons.
•Int
erp
ret
the f
inal fo
rmul
as.
Do
they m
ake int
uiti
ve s
ens
e? R
efe
r back
to
the s
ketc
hes
and
ori
gina
l pr
oble
m
•Calc
ulate
num
eri
cal re
sult
s, a
nd s
ani
ty c
heck
anw
ers
(e.g
., r
ight
order
of
magn
itud
e?)
am
FF
in
et
rr
= ==== ===∑ ∑∑∑
Ii
ne
tα ααα
= ===τ τττ
= ===τ τττ
∑ ∑∑∑r
rr
No
te:
can
ha
ve
Fn
et.e
q.
0
bu
t τ τττ
ne
t.n
e. 0

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
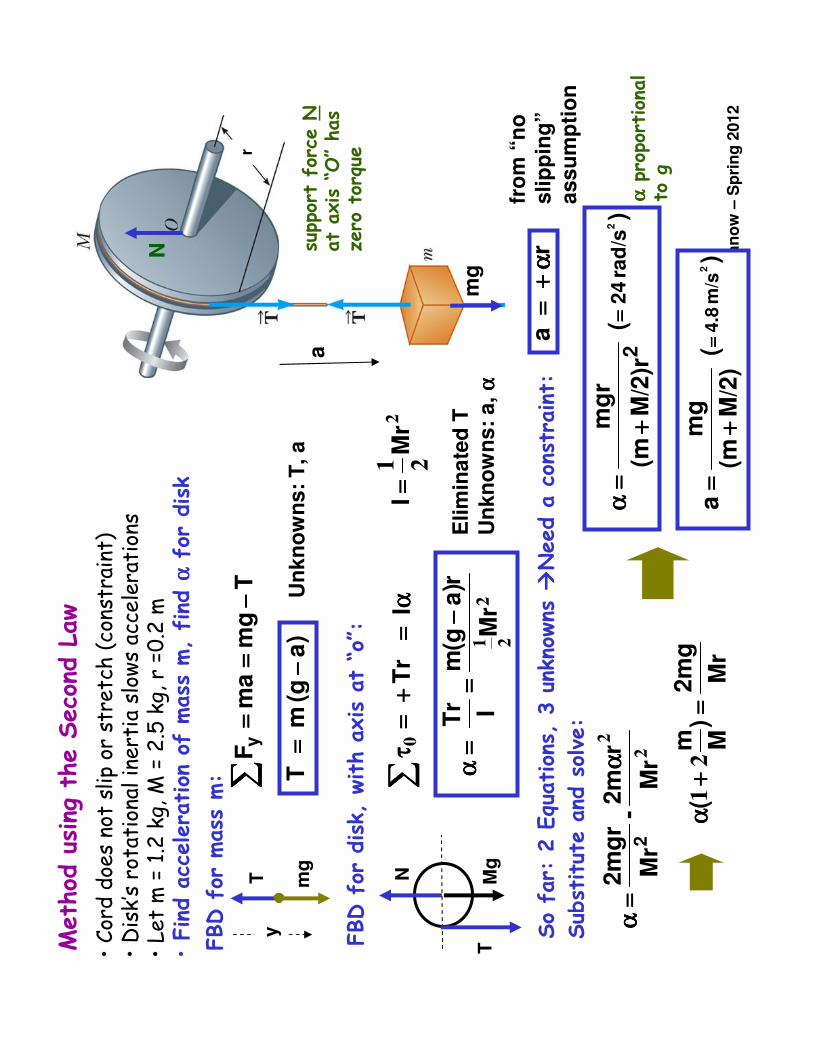
Example: Angular Acceleration of a W
heel
Standard approach:
�B
reak in
to t
wo
su
b-s
ys
tem
s�
wh
eel is
accele
rate
d a
ng
ula
rly b
y t
en
sio
n T
�b
lock is a
ccele
rate
d lin
earl
y b
y w
eig
ht
mg
, w
ith
ten
sio
n
op
po
sin
g
�D
raw
fre
e b
od
y d
iag
ram
s
�T
he w
heel is
ro
tati
ng
an
d s
o w
e a
pp
ly
Σ ΣΣΣτ τττ
=
=
=
= Ι
α ΙαΙαΙα�
Th
e t
en
sio
n (
tan
gen
tial)
su
pp
lies t
he t
orq
ue
�T
he m
ass m
m
oves
in
a s
tra
igh
t li
ne,
so
ap
ply
N
ew
ton
’s S
eco
nd
Law
Σ ΣΣΣF
y=
ma
y=
mg
-T
�H
ow
to
co
nn
ec
t th
e t
wo
pro
ble
ms a
bo
ve?
�A
co
nstr
ain
t lin
ks lin
ear
accele
rati
on
to
α ααα
a =
α αααr
r
a
mg
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
FBD f
or m
ass
m:
T mg
y
Tm
gm
aF
y− −−−
= ==== ===
∑ ∑∑∑ )
ag(
m
T
− −−−= ===
Un
kn
ow
ns:
T, a
FBD f
or d
isk,
wit
h a
xis
at
“o”:
N Mg
T
2
21M
rI
= ===α ααα
= ===+ +++
= ===τ τττ
∑ ∑∑∑I
T
r
0
M
r
r)a
g(m
ITr
2
21
− −−−= ===
= ===α ααα
Elim
ina
ted
T
Un
kn
ow
ns:
a,
α ααα
So
far:
2 E
quati
ons,
3 u
nkno
wns
� ���N
eed a
con
stra
int:
r
a
α ααα+ +++
= ===fr
om
“n
o
slip
pin
g”
assu
mp
tio
nSub
stit
ute a
nd s
olve
:
α αααpr
opor
tion
al
to g
M
r
2m
g)
Mm(
= ===
+ +++α ααα
21
r
M
r2m
- M
r
2m
gr
2
2
2α ααα
= ===α ααα
)(
M
/2)r
(m
mg
r
2ra
d/s
2
42
= ===+ +++
= ===α ααα
)(
M
/2)
(m
mg
a
2m
/s
4.8
= ===
+ +++= ===
•C
ord
doe
s no
t sl
ip o
r st
retc
h (
cons
trai
nt)
•D
isk’s
rot
atio
nal
inert
ia s
low
s ac
cele
rati
ons
•Let
m =
1.2
kg,
M =
2.5
kg,
r =
0.2
m•
Fin
d a
ccele
rati
on o
f m
ass
m,
find
α αααfo
r dis
k
r
a
mg
supp
ort
forc
e N
at
axis
“O
”has
zero
tor
que
N
Meth
od u
sing
the S
eco
nd L
aw

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Sam
e p
roble
m –
usin
g sy
stem
poin
t of
vie
w (
caut
ion)
Defi
ne t
he s
yst
em
(dash
ed lin
e)
•ig
nore
int
ern
al to
rque
s & f
orce
s (e
.g.,
Tens
ions
)•
dete
rmin
e t
otal sy
stem
rota
tion
al in
ert
ia (
abou
t “O
”)
y
fo
rces
n
ox
gm
Mg
N
F
F
+ +++= ===
⇒ ⇒⇒⇒= ==== ===
∑ ∑∑∑∑ ∑∑∑00
App
ly lin
ear
Seco
nd L
aw (
no n
ew inf
o):
App
ly r
otati
onal Seco
nd L
aw t
o sy
stem
:
22
21 m
as
sp
ul
sys
rm
Mr
II
I+ +++
= ===+ +++
= ===
I sys
ex
t,
ne
tα ααα
= ===τ τττ
m
gr
mass
ext
,n
et
+ +++= ===
τ τττ= ===
τ τττ
m
rM
r
gr
m
212
2+ +++
= ===α ααα
m
M
gm
r
a
21T
+ +++= ===
α ααα= ===
r
a
mg
Mg
N
M
r
21I
2
pu
l= ===
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
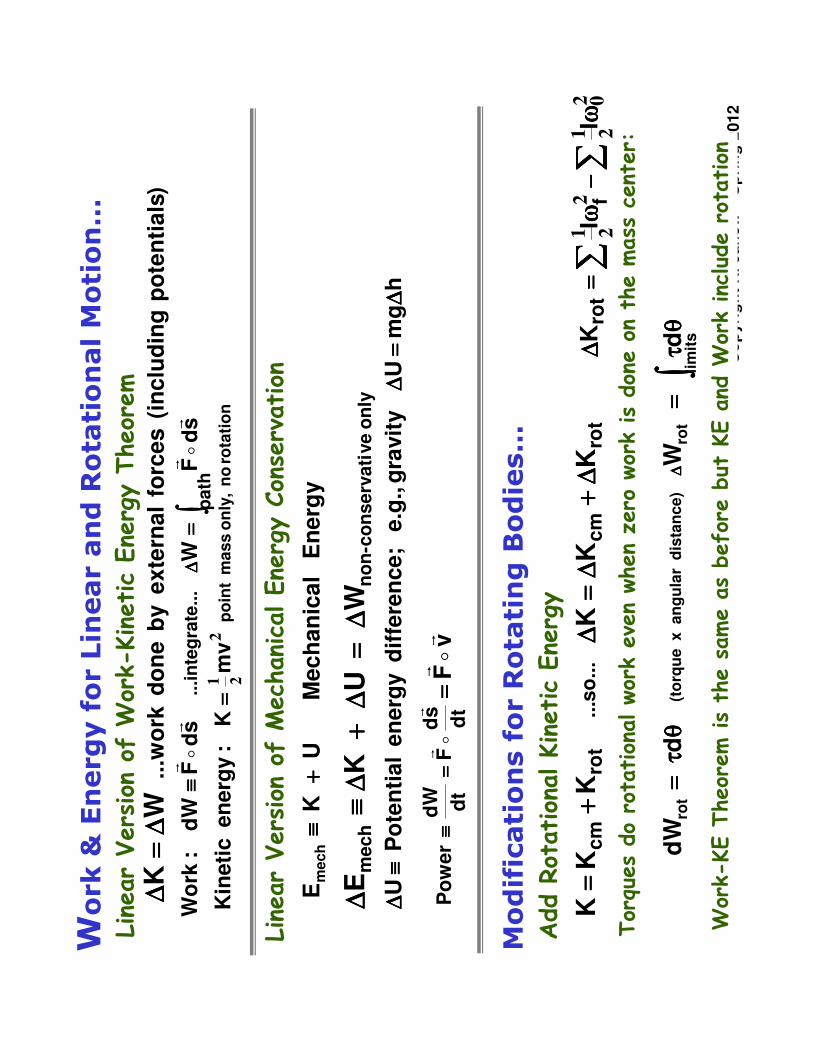
Modifications for Rotating Bodies…
Add R
otati
onal Kin
eti
c Ene
rgy
K
KK
K
KK
rot
cm
...s
o...
rot
cm
∆ ∆∆∆+ +++
∆ ∆∆∆= ===
∆ ∆∆∆+ +++
= ===
Wor
k-KE T
heor
em
is
the s
am
e a
s befo
re b
ut K
E a
nd W
ork inc
lude r
otati
on
2 021
2
21ω ωωω
− −−−ω ωωω
= ===∆ ∆∆∆
∑ ∑∑∑∑ ∑∑∑
II
Kf
rot
Tor
ques
do
rota
tion
al wor
k e
ven
when
zero
wor
k is
don
e o
n th
e m
ass
cent
er:
∫ ∫∫∫θ θθθ
τ τττ= ===
θ θθθτ τττ
= ===∆ ∆∆∆
lim
its
rot
dis
tan
ce
)
an
gu
lar
x
(t
orq
ue
ro
td
W
d
dW
hm
gU
gra
vit
y
e.g
.,
;d
iffe
ren
ce
en
erg
y
Po
ten
tial
U
∆ ∆∆∆
= ===∆ ∆∆∆
≡ ≡≡≡∆ ∆∆∆
E
nerg
y
Mech
an
ical
U
K
E
me
ch
+ +++
≡ ≡≡≡
vF
dts
dF
dt
dW
Po
wer
ro
rr
or
= ==== ===
≡ ≡≡≡
Lin
ear
Vers
ion
of M
ech
ani
cal Ene
rgy C
onse
rvati
on
on
ly
ve
co
nserv
ati
-n
on
mech
W
U
KE
∆ ∆∆∆= ===
∆ ∆∆∆+ +++
∆ ∆∆∆≡ ≡≡≡
∆ ∆∆∆
Work & Energy for Linear and Rotational Motion…
rota
tio
n
no
o
nly
,
mass
po
int
mv
K
:
en
erg
y
Kin
eti
c2
21= ===
∫ ∫∫∫= ===
≡ ≡≡≡∆ ∆∆∆
path
te...
...in
teg
ra
sd
FW
sd
Fd
W
:W
ork
ro
rr
or
Lin
ear
Vers
ion
of W
ork-
Kin
eti
c Ene
rgy T
heor
em
)p
ote
nti
als
(i
nc
lud
ing
fo
rce
s
ex
tern
al
b
y
do
ne
...w
ork
WK
∆ ∆∆∆= ===
∆ ∆∆∆
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
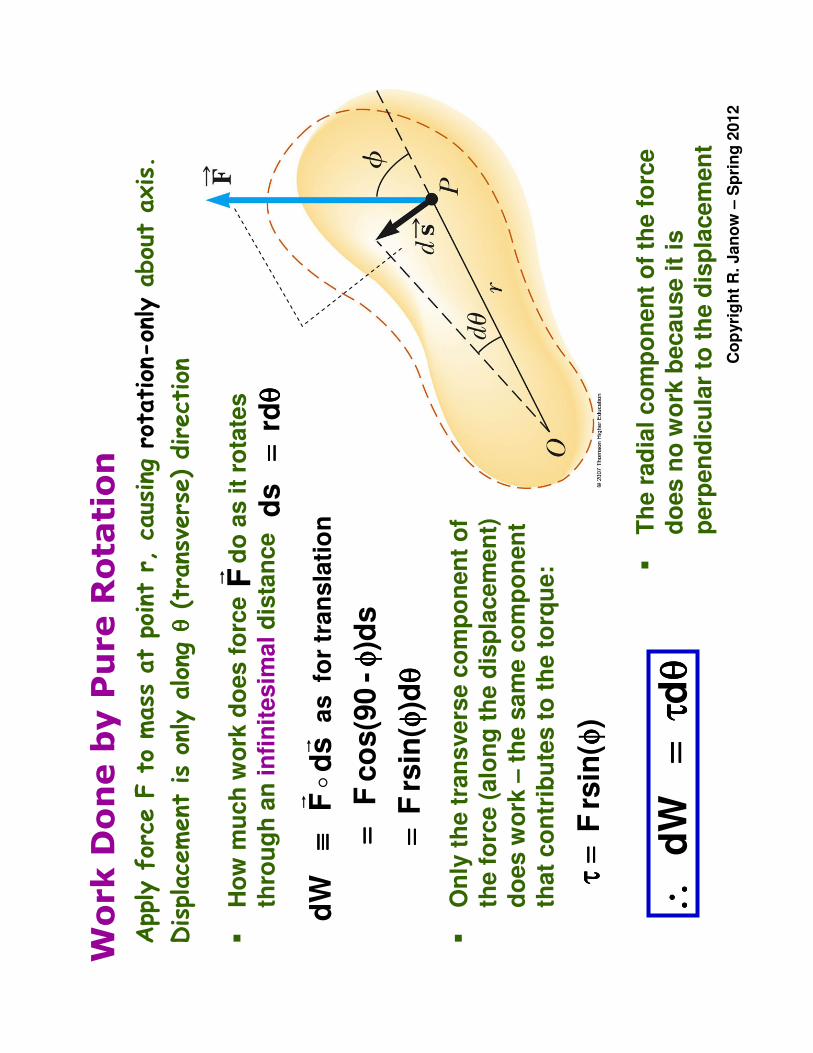
Work Done by Pure Rotation
θ θθθφ φφφ
= ===
φ φφφ= ===≡ ≡≡≡
)drs
in(
F
)ds
-co
s(9
0
F
s
dF
W
d
n
tran
sla
tio
fo
r
as
ro
r
App
ly f
orce
F t
o m
ass
at
poin
t r,
caus
ing
rota
tion
-on
lyabou
t axis
.
Dis
place
ment
is
only
alo
ng θ θθθ
(tra
nsve
rse)
dir
ect
ion
�O
nly
th
e t
ran
sve
rse c
om
po
nen
t o
f
the f
orc
e (
alo
ng
th
e d
isp
lacem
en
t)
do
es w
ork
–th
e s
am
e c
om
po
nen
t th
at
co
ntr
ibu
tes t
o t
he t
orq
ue:
θ θθθτ τττ
= ===∴ ∴∴∴
d
W
d
)rs
in(
F
φ φφφ= ===
τ τττ
�T
he r
ad
ial
co
mp
on
en
t o
f th
e f
orc
e
do
es n
o w
ork
becau
se i
t is
perp
en
dic
ula
r to
th
e d
isp
lacem
en
t
Fr
θ θθθ= ===
dr
sd
�H
ow
mu
ch
wo
rk d
oes f
orc
e
do
as i
t ro
tate
s
thro
ug
h a
n in
fin
itesim
al
dis
tan
ce
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
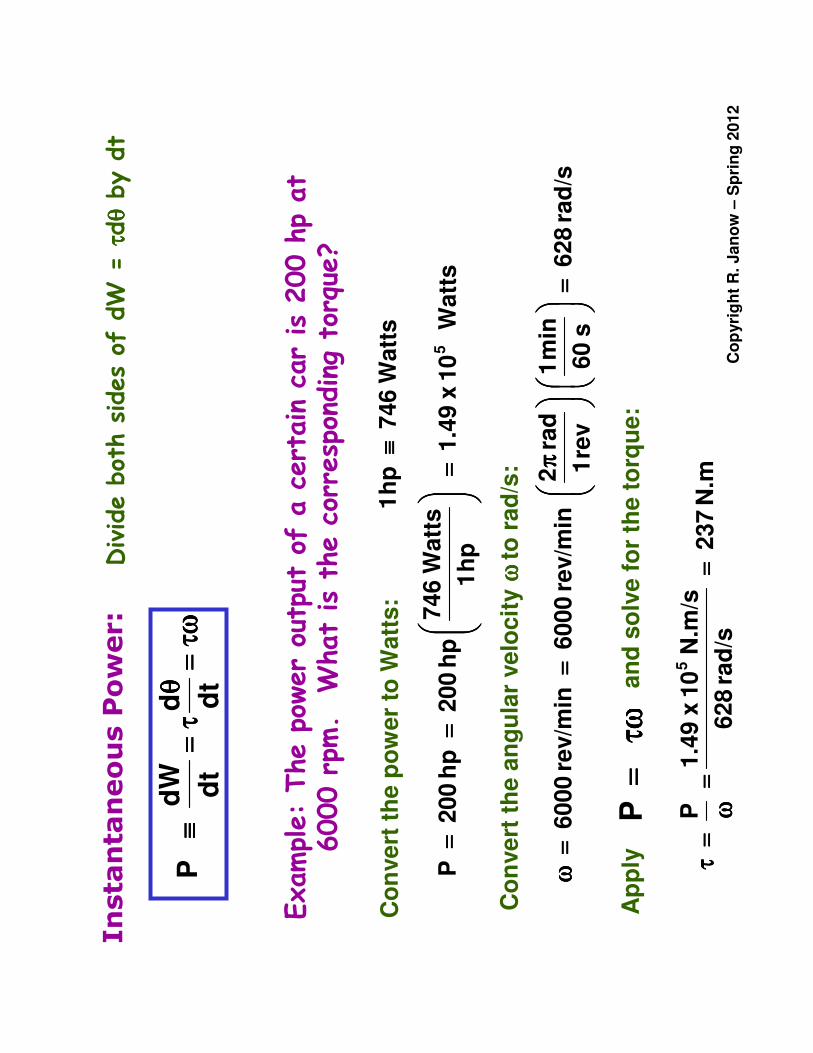
Instantaneous Power:
τω τωτωτω= ===
θ θθθτ τττ
= ===≡ ≡≡≡
dt
d
dt
dW
P
Div
ide b
oth s
ides
of d
W= τ τττ
dθ θθθ
by d
t
Watt
s746
hp
1≡ ≡≡≡
W
att
s10
x
1.4
9
hp
1 Watt
s746
h
p
200
hp
200
P5
= ===
= ===
= ===
Co
nve
rt t
he a
ng
ula
r velo
cit
y ω
ω
ω
ω
to
rad
/s:
rad
/s
628
s 60m
in 1
re
v 1
rad
2
re
v/m
in
6000
rev/m
in
6000
= ===
π πππ
= ==== ===
ω ωωω
τω τωτωτω= ===
P
Ap
ply
an
d s
olv
e f
or
the t
orq
ue:
N.m
237
rad
/s
628
N.m
/s
10
x
1.4
9
P
5
= ==== ===
ω ωωω= ===
τ τττ
Exam
ple:
The p
ower
outp
ut o
f a c
ert
ain
car
is 2
00 h
p at
6000 r
pm.
What
is t
he c
orre
spon
din
g to
rque
?
Co
nve
rt t
he p
ow
er
to W
att
s:
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
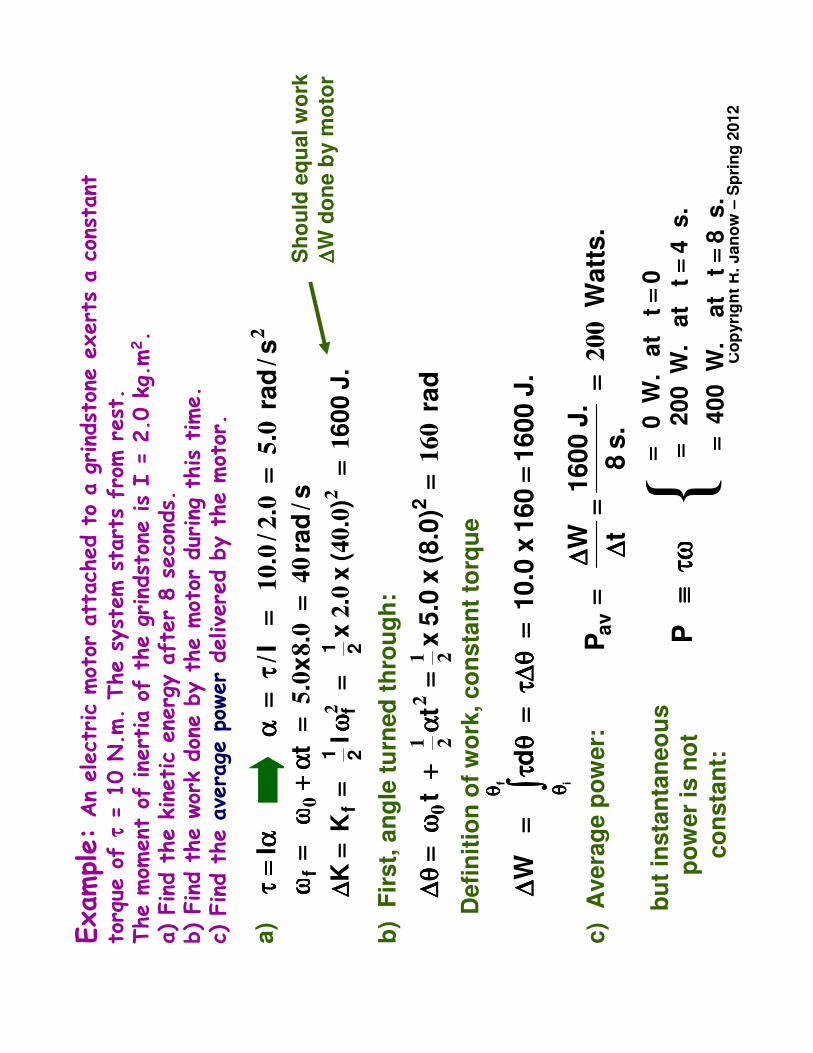
Exam
ple:
An
ele
ctri
c m
otor
att
ach
ed t
o a g
rind
ston
e e
xert
s a c
onst
ant
to
rque
of
τ τττ= 1
0 N
.m.
The s
yst
em
sta
rts
from
rest
. The m
oment
of
inert
ia o
f th
e g
rind
ston
e is
I =
2.0
kg.
m2.
a)
Fin
d t
he k
ineti
c ene
rgy a
fter
8 s
eco
nds.
b)
Fin
d t
he w
ork d
one b
y t
he m
otor
dur
ing
this
tim
e.
c) F
ind t
he a
vera
ge p
ower
delive
red b
y t
he m
otor
.
a)
α ααα= ===
τ τττI
20
50
20
10
s/ra
d
.
.
/.
I/
= ===
= ===τ τττ
= ===α ααα
s/ra
d
.x
.
t
f40
08
05
0= ===
= ===α ααα
+ +++ω ωωω
= ===ω ωωω
J.
6
00
).
( x
.
x
I
K
K21
f21
f1
040
02
22
= ==== ===
ω ωωω= ===
= ===∆ ∆∆∆
Sh
ou
ld e
qu
al w
ork
∆ ∆∆∆W
do
ne b
y m
oto
r
b)
Fir
st,
an
gle
tu
rned
th
rou
gh
:
rad
(8.0
)
x 5.0
x
t
t
2
16
021
2
21
0= ===
= ===α ααα
+ +++ω ωωω
= ===θ θθθ
∆ ∆∆∆
∫ ∫∫∫θ θθθ θ θθθ
= ==== ===
θ θθθ∆ ∆∆∆τ τττ
= ===θ θθθ
τ τττ= ===
∆ ∆∆∆f i
J.
1600
160
x
10.0
d
W
Defi
nit
ion
of
wo
rk, co
nsta
nt
torq
ue
c)
Ave
rag
e p
ow
er:
.W
att
s
s.
8
J.
1600
tW
P
av
200
= ==== ===
∆ ∆∆∆∆ ∆∆∆= ===
bu
t in
sta
nta
neo
us
po
wer
is n
ot
co
nsta
nt:
τω τωτωτω≡ ≡≡≡
P
0 t
at
W
.0
= ===
= ===
s.
8
t at
W
.400
= ==== ===
s.
4
t
at
W
.200
= ===
= ==={

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Summary:
Pure Translation (Fixed Direction)
Pure Rotation (Fixed Axis)
Position coordinate x
Angular position
θ θθθ
Velocity v= dx/dy
Angular velocity
ω
ω
ω
ω = d
θ θθθ/dt
Acceleration a = dv/dt
Angular acceleration α ααα= d
ω ωωω/dt
Mass m
Rotational inertia I
Newton's second law Fnet= ma
Newton's second law τ τττnet= I
α ααα
Work dW
= Fdx
Work dW
= τ
τ τ τ d
θ θθθ
Kinetic energy Kcm= (m/2)v2
Kinetic energy Krot= (I/2)
ω ωωω2
Power (constant force) P= F.v
Power (constant torque) P= τ
ωτωτω
τω
Work–KE theorem
∆ ∆∆∆W = ∆ ∆∆∆K
Same, include K
rot
∆ ∆∆∆W
= ∆ ∆∆∆K
Ene
rgy C
onse
rvati
on:
for
trans
lati
on +
rot
ati
on a
bou
t m
ass
cent
er
(cm
)
W
KK
Kc
mro
tto
t∆ ∆∆∆
= ===∆ ∆∆∆
+ +++∆ ∆∆∆
≡ ≡≡≡∆ ∆∆∆
∆ ∆∆∆W includes both conservative and
non-conservative forces, treated as
external to system
OR
W
UK
En
cto
tm
ec
h∆ ∆∆∆
= ===∆ ∆∆∆
+ +++∆ ∆∆∆
≡ ≡≡≡∆ ∆∆∆
∆ ∆∆∆W
ncincludes only non-conservative
forces,
∆ ∆∆∆U contains the conservative
forces
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
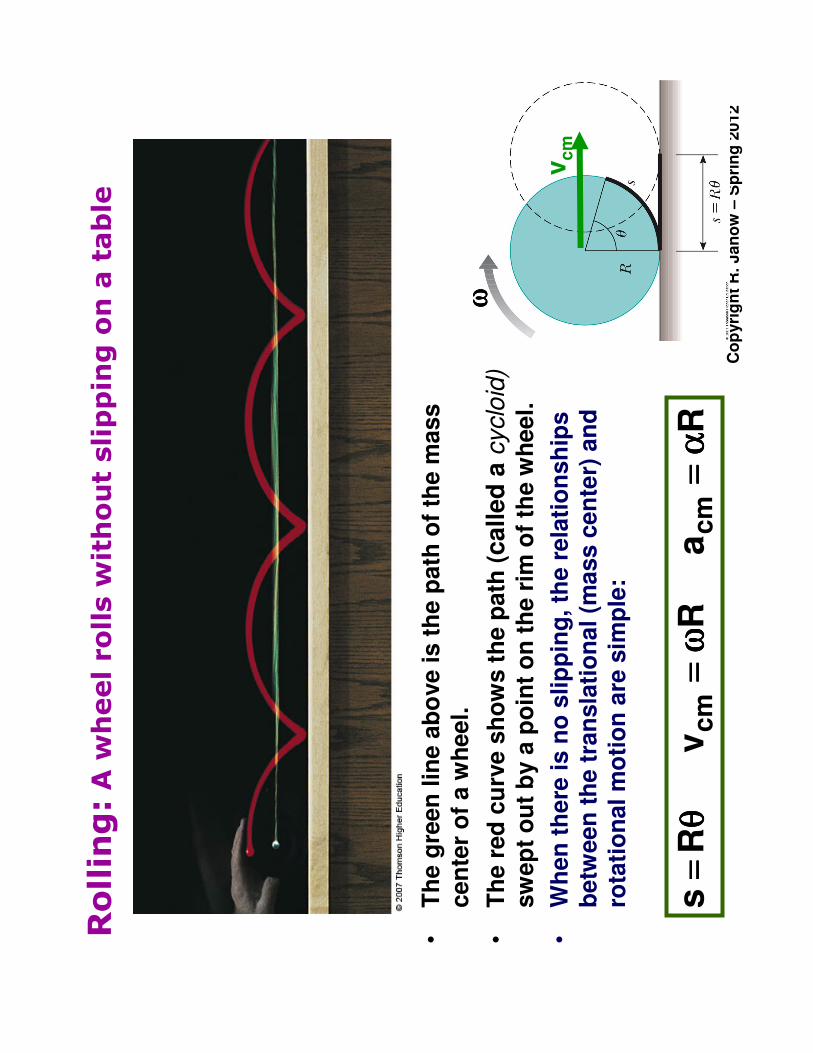
Rolling:A wheel rolls without slipping on a table
•T
he g
reen
lin
e a
bo
ve i
s t
he p
ath
of
the m
ass
cen
ter
of
a w
heel.
•T
he r
ed
cu
rve
sh
ow
s t
he p
ath
(called
a c
yclo
id)
sw
ep
t o
ut
by a
po
int
on
th
e r
im o
f th
e w
heel.
•W
hen
th
ere
is n
o s
lip
pin
g,
the r
ela
tio
nsh
ips
betw
een
th
e t
ran
sla
tio
nal
(mass c
en
ter)
an
d
rota
tio
nal
mo
tio
n a
re s
imp
le:
Ra
Rv
R s
cm
cm
α ααα= ===
ω ωωω= ===
θ θθθ= ===
ω ωωω
vcm
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
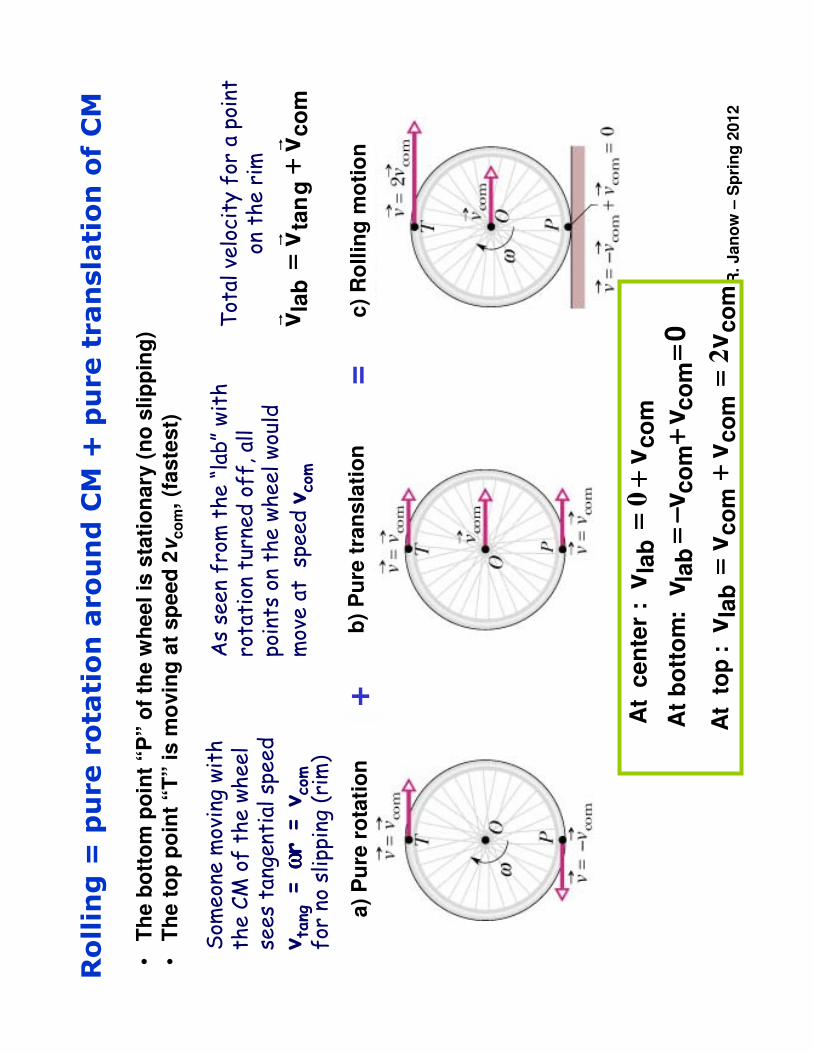
Rolling = pure rotation around CM + pure translation of CM
•T
he b
ott
om
po
int
“P
”o
f th
e w
heel is
sta
tio
nary
(n
o s
lip
pin
g)
•T
he t
op
po
int
“T
”is
mo
vin
g a
t sp
eed
2v
co
m,
(fa
ste
st)
a)
Pu
re r
ota
tio
n
Som
eon
e m
ovin
g w
ith
th
e C
M o
f th
e w
heel
sees
tang
ent
ial
speed
v t
ang
= ω ωωω
r= v
com
for
no s
lipp
ing
(rim
)
As
seen
from
th
e “
lab
”w
ith
ro
tati
on t
urne
d o
ff,
all
poin
ts o
n th
e w
heel
wou
ld
mov
e a
t s
peed
vco
m
b)
Pu
re t
ran
sla
tio
n+
Tot
al v
elo
city
for
a p
oint
on t
he r
im
co
mg
tan
lab
vv
vr
rr
+ +++= ===
c)
Ro
llin
g m
oti
on
=
co
mla
b:
ce
nte
r
At
vv
+ +++
= ===0
0
vv
v c
om
co
mla
b :
bo
tto
m
At
= ===+ +++
− −−−= ===
co
mc
om
co
mla
b:
top
A
tv
vv
v
2= ===
+ +++= ===
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
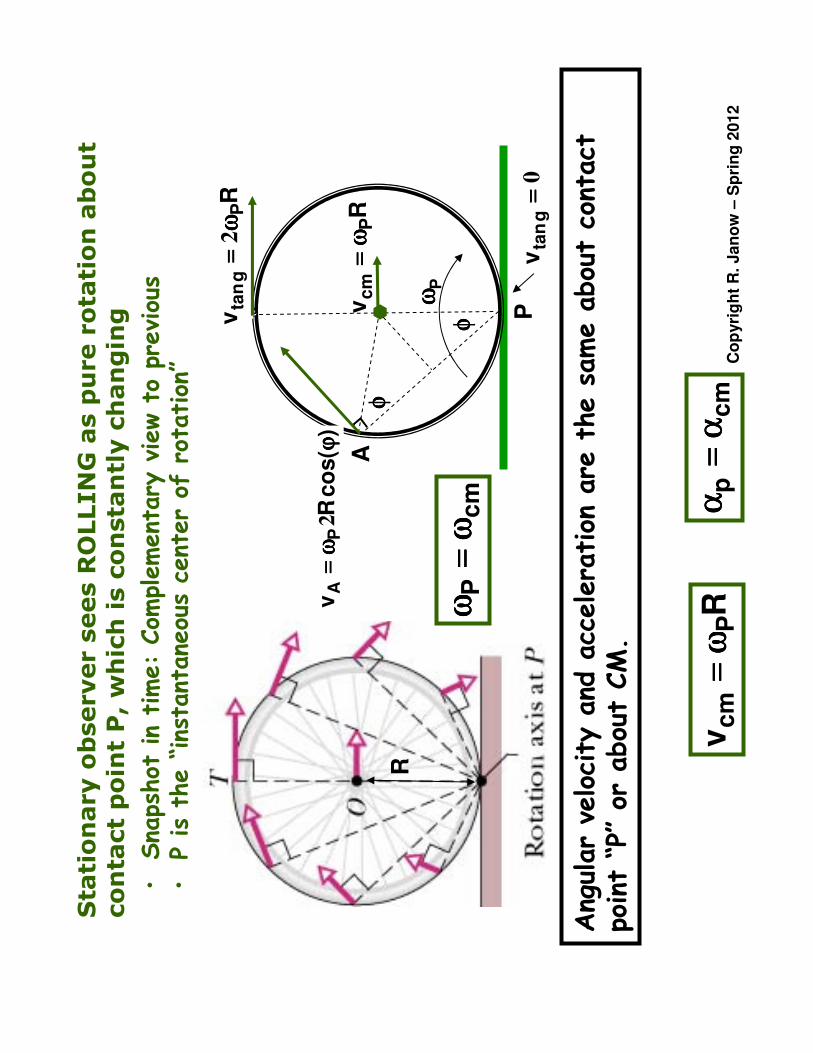
Stationary observer sees ROLLING as pure rotation about
contact point P, which is constantly changing
•Sna
pshot
in
tim
e:
Com
plem
ent
ary
vie
w t
o pr
evi
ous
•P
is t
he “
inst
ant
ane
ous
cent
er
of r
otati
on”
R
Rv
Pc
mω ωωω
= ===
cm
Pω ωωω
= ===ω ωωω
cm
pα ααα
= ===α ααα
P
ω ωωωP
Rv
Pg
tan
ω ωωω= ===
2
φ φφφ
φ φφφ
)co
s(
Rv
PA
ϕ ϕϕϕω ωωω
= ===2
AR
vP
cm
ω ωωω= ===
0= ===
gta
nv
Ang
ular
velo
city
and
acc
ele
rati
on a
re t
he s
am
e a
bou
t co
ntact
po
int
“P”
or a
bou
t CM
.

Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
Exam
ple:
Fin
d t
he s
peed o
f th
e b
owling
ball a
s it
rol
ls w
/o s
lipp
ing
to
the b
otto
m o
f th
e r
am
p. U
se e
nerg
y c
onse
rvati
on
�Rot
ati
on a
ccele
rate
s due
to
fric
tion
betw
een
the s
phere
and
the r
am
p�
Fri
ctio
n fo
rce s
uppl
ies
the n
et
torq
ue
that
caus
es
ang
ular
acc
ele
rati
on.
�Con
tact
poi
nt is
alw
ays
at
rest
rela
tive
to
the s
urfa
ce,
so n
o wor
k is
don
e
aga
inst
fri
ctio
n�
The m
ech
ani
cal ene
rgy d
oes
not
chang
e�
There
is
now a
rot
ati
on t
erm
in
the K
E
�L
et
Uf=
0 a
t th
e b
ott
om
of
the p
lan
e
�K
i= 0
at
the t
op
(sta
rt f
rom
rest)
�U
i=
Mg
hat
the t
op
, U
f=
0
�R
ollin
g c
on
dit
ion
:
ff
ii
co
nsta
nt
mech
UK
UK
E
+ +++= ===
+ +++= ===
= ===
ff
vR
= ===ω ωωω
�E
qu
ate
kin
eti
c &
po
ten
tia
l
en
erg
y c
han
ges
2
2
22
fcm
21f
21f
cm
21f
vM
RIM
v
I
K
+ +++
= ===+ +++
ω ωωω= ===
Mg
hv
MRI
K
fcm
21f
= ===
+ +++
= ===2
2
�S
up
po
se b
all
is
a s
oli
d s
ph
ere
2
52M
RI c
m= ===
Mg
hM
vf
21= ===
+ +++2
55
52
21
710
/
f
gh
v
= ===
∴ ∴∴∴
Note: Need Second Law approach
to find internal forces, like friction
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
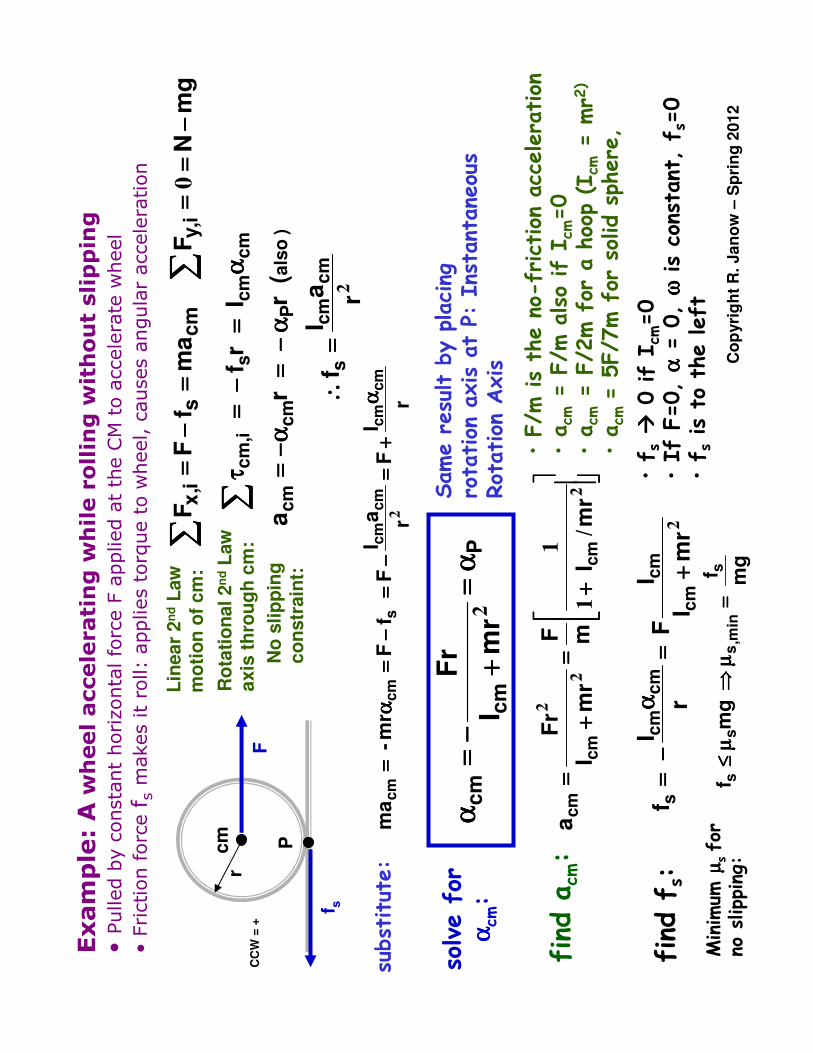
Example: Awheel accelerating while rolling without slipping
•Pulled b
y c
onsta
nt
horizonta
l fo
rce F
applied a
t th
e C
M t
o a
ccele
rate
wheel
•Friction forc
e f
sm
akes it
roll:
applies t
orq
ue t
o w
heel, c
auses a
ngula
r accele
ration
cm P
F
f s
CC
W =
+
r
Lin
ear
2n
dL
aw
mo
tio
n o
f cm
:m
gN
F
ma
fF
Fi
y,
cm
si,
x− −−−
= ==== ===
= ===− −−−
= ===∑ ∑∑∑
∑ ∑∑∑0
Ro
tati
on
al 2
nd
Law
axis
th
rou
gh
cm
:cm
cm
si,
cm
I
rf
α ααα= ===
− −−−= ===
τ τττ∑ ∑∑∑
No
slip
pin
g
co
nstr
ain
t:)
als
oP
cm
cm
( r
r
aα ααα
− −−−= ===
α ααα− −−−
= ===
2ra
If
cm
cm
s= ===
∴ ∴∴∴
subst
itut
e:
r
IF
raI
F
fF
mr
-
ma
cm
cm
cm
cm
scm
cm
α ααα+ +++
= ===− −−−
= ===− −−−
= ===α ααα
= ===2
solv
e f
or
α αααcm
:
m
rI
Fr
P
cm
cm
α ααα= ===
+ +++− −−−
= ===α ααα
2
Sam
e r
esu
lt b
y p
laci
ng
rota
tion
axis
at
P: I
nsta
ntane
ous
Rot
ati
on A
xis
find
acm
:
+ +++= ===
+ +++= ===
22
2
1
1
mr
/I
mF
m
rI
Fr
a
cm
cm
cm
•F/m
is
the n
o-fr
icti
on a
ccele
rati
on•
acm
= F
/m a
lso
if I
cm=0
•a
cm= F
/2m
for
a h
oop
(Icm
= m
r2)
•a
cm= 5
F/7
m f
or s
olid
sph
ere
,
mr
I
IF
r
I
f
cm
cm
cm
cm
s2
+ +++= ===
α ααα− −−−
= ===fi
nd f
s:•
f s� ���
0 if
Icm
=0
•If
F=0,
α ααα= 0
, ω ωωω
is c
onst
ant
, f s
=0
•f s
is t
o th
e left
Min
imum
µ µµµs fo
r no
slipp
ing:
m
g
f
mg
f
sm
in,
ss
s= ===
µ µµµ⇒ ⇒⇒⇒
µ µµµ≤ ≤≤≤
Co
pyri
gh
t R
. J
an
ow
–S
pri
ng
2012
α ααα,
I cm
Fg=
Mg
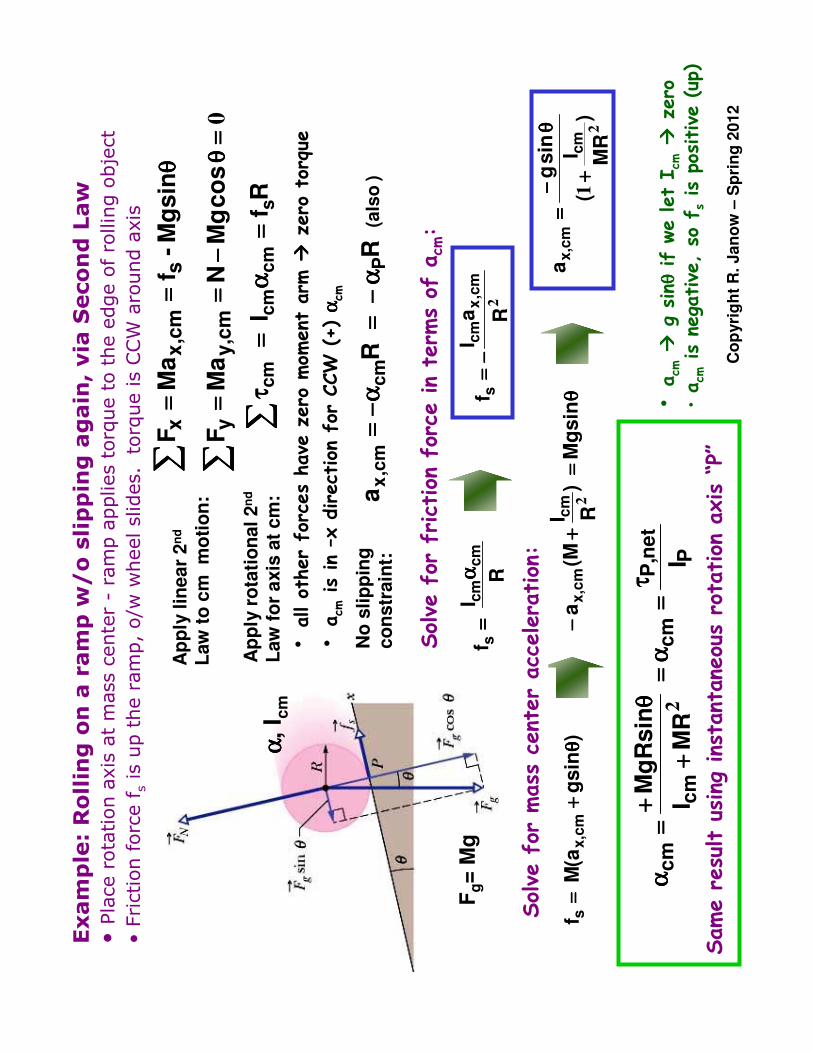
Example: Rolling on a ramp w/o slipping again, via Second Law
•Pla
ce r
ota
tion a
xis
at
mass c
ente
r -
ram
p a
pplies t
orq
ue t
o t
he e
dge o
f ro
llin
g o
bje
ct
•Friction forc
e f
sis
up t
he r
am
p, o/w
wheel slides. t
orq
ue is C
CW
aro
und a
xis
Ap
ply
lin
ear
2n
d
Law
to
cm
m
oti
on
:0
= ===θ θθθ
− −−−= ===
= ===
θ θθθ= ===
= ===
∑ ∑∑∑∑ ∑∑∑c
os
Mg
NM
aF
Mg
sin
-f
Ma
F
cm
,y
y
scm
,x
x
Ap
ply
ro
tati
on
al 2
nd
Law
fo
r axis
at
cm
:R
fI
scm
cm
cm
= ===α ααα
= ===τ τττ
∑ ∑∑∑•
all o
ther
forc
es
have
zero
mom
ent
arm
� ���ze
ro t
orqu
e
No
slip
pin
g
co
nstr
ain
t:)
(als
oP
cm
cm
,x
R
R
a
α ααα− −−−
= ===α ααα
− −−−= ===
•a
cmis
in
–x d
irect
ion
for
CCW
(+)
α αααcm
Sol
ve f
or f
rict
ion
forc
e in
term
s of
acm
:
R
I
f
cm
cm
s
α ααα= ===
RaI
f
cm
,x
cm
s2
− −−−= ===
•a
cm� ���
g si
nθ θθθif
we let
Icm
� ���ze
ro•
acm
is n
ega
tive
, so
fs
is p
osit
ive (
up)
Sam
e r
esu
lt u
sing
ins
tant
ane
ous
rota
tion
axis
“P”
I
MR
I
Mg
Rsin
Pn
et
,P
cm
cm
cm
τ τττ= ===
α ααα= ===
+ +++
θ θθθ+ +++
= ===α ααα
2
)g
sin
(aM
f
x,c
ms
θ θθθ+ +++
= ===
)M
R
I(
sin
ga
cm
x,c
m
21
+ +++
θ θθθ− −−−
= ===
Mg
sin
)
RI (M
a
cm
x,c
mθ θθθ
= ===+ +++
− −−−2
Sol
ve f
or m
ass
cent
er
acc
ele
rati
on: