P O L I T E C H N I K A G D A S K A WYDZIAŁ ... · trowni szczytowych zalicza się także...
62
P O L I T E C H N I K A G D A Ń S K A WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Elektroenergetyki Dr hab. inż. Ryszard Zajczyk profesor PG REGULACJA CZĘSTOTLIWOŚCI I MOCY W SYSTEMIE ELEKTROENERGETYCZNYM (materiał do wykładu ) Gdańsk 2002 r.
Transcript of P O L I T E C H N I K A G D A S K A WYDZIAŁ ... · trowni szczytowych zalicza się także...

P O L I T E C H N I K A G D A Ń S K A WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI
Katedra Elektroenergetyki
Dr hab. inż. Ryszard Zajczyk profesor PG
REGULACJA CZĘSTOTLIWOŚCI I MOCY W SYSTEMIE ELEKTROENERGETYCZNYM
(materiał do wykładu )
Gdańsk 2002 r.

2

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 3
Spis treści: str.
1 WSTĘP. ...............................................................................................................................5
2 OGÓLNA CHARAKTERYSTYKA SYSTEMU ELEKTROENERGETYCZNEGO 6 2.1 BUDOWA SYSTEMU ELEKTROENERGETYCZNEGO. .........................................................6 2.1. ORGANIZACJA I KIEROWANIE PRACĄ SYSTEMU ELEKTROENERGETYCZNEGO................7
3 SYSTEM ELEKTROENERGETYCZNY JAKO OBIEKT REGULACJI CZĘSTOTLIWOŚCI I MOCY. ......................................................................................12
3.1. ZMIANY CZĘSTOTLIWOŚCI W SYSTEMIE ELEKTROENERGETYCZNYM, ICH PRZYCZYNY I SKUTKI........................................................................................................................12
3.1.1. Obciążenie systemu elektroenergetycznego. .......................................................12 3.1.2. Moc wytwarzana w systemie elektroenergetycznym............................................13 3.1.3. Zmiany częstotliwości w systemie elektroenergetycznym....................................13
3.2. CHARAKTERYSTYKI STATYCZNE. ...............................................................................14 3.1.1 Charakterystyki statyczne odbiorów mocy czynnej. ............................................14 3.1.2 Charakterystyki statyczne źródeł mocy. ..............................................................16 3.1.3 Charakterystyki statyczne systemu elektroenergetycznego. ................................18
3.3. REGULACJA PIERWOTNA I WTÓRNA CZĘSTOTLIWOŚCI I MOCY CZYNNEJ W SYSTEMIE ELEKTROENERGETYCZNYM.........................................................................................18
3.1.4 Regulacja częstotliwości i mocy czynnej w izolowanym systemie elektroenergetycznym. .........................................................................................21
3.1.5 Regulacja częstotliwości i mocy czynnej w połączonych systemach elektroenergetycznych. ........................................................................................22
4 UKŁADY REGULACJI CZĘSTOTLIWOŚCI I MOCY W SYSTEMIE ELEKTROENERGETYCZNYM...................................................................................24
4.1 TURBINY I ICH UKŁADY REGULACJI. ...........................................................................24 4.1.1 Zadania i wymagania stawiane układom regulacji turbin. .................................25 4.1.2 Zasada działania układów regulacji turbin.........................................................26 4.1.3 Elektrohydrauliczny układ regulacji turbiny. ..............................................29 4.1.4 Regulacja turbin kondensacyjnych......................................................................30 4.1.5 Regulacja turbin upustowych. ............................................................................31 4.1.6 Regulacja turbin przeciwprężnych. ..................................................................32
4.2 BLOK ENERGETYCZNY JAKO OBIEKT REGULACJI.........................................................33
5 AUTOMATYCZNA REGULACJA CZĘSTOTLIWOŚCI I MOCY (ARCM) W KRAJOWYM SYSTEMIE ELEKTROENERGETYCZNYM (KSE)........................37
5.1 ZASADY REGULACJI....................................................................................................38 5.2 STRUKTURA I ZASADA DZIAŁANIA UKŁADU AUTOMATYCZNEJ REGULACJI
CZĘSTOTLIWOŚCI I MOCY. ...........................................................................................40 5.3 REGULATOR CENTRALNY MRC I SYSTEM TRANSMISJI SYGNAŁÓW REGULACYJNYCH I
TELEPOLECEŃ. ............................................................................................................42
6 WYPOSAŻENIE SPRZĘTOWE UKŁADU ARCM ZNAJDUJĄCE SIĘ W ELEKTROWNIACH KSE. .............................................................................................47
6.1 ELEKTROWNIE CIEPLNE. .............................................................................................47 6.1.1 Charakterystyka układów regulacji turbozespołów. ...........................................47

4
6.1.2 Układ automatycznej regulacji kotłów energetycznych opalanych węglem brunatnym. .......................................................................................................... 50
6.1.3 Układ automatycznej regulacji kotłów energetycznych opalanych węglem kamiennym. ......................................................................................................... 52
6.1.4 Układ automatycznej regulacji pierwotnej i wtórnej bloków opalanych węglem kamiennym. ......................................................................................................... 52
6.2 ELEKTROWNIE WODNE............................................................................................... 55 6.2.1 Wyposażenie sprzętowe układów regulacji mocy czynnej i częstotliwości w
elektrowniach Dychów, Rożnów, Solina, Żydowo i Tresna ................................ 55 6.2.2 Wyposażenie sprzętowe układów regulacji mocy czynnej i częstotliwości w
Elektrowni Szczytowo-Pompowej Żar-Porąbka.................................................. 56 6.2.3 Wyposażenie sprzętowe układów regulacji mocy czynnej i częstotliwości w
Elektrowni Szczytowo-Pompowej Żarnowiec. .................................................... 59
7 BIBLIOGRAFIA: ............................................................................................................ 62

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 5
1 Wstęp. System elektroenergetyczny cechuje duża różnorodność charakterystyk statycznych i dy-
namicznych urządzeń realizujących procesy wytwarzania, przesyłu i rozdziału energii elek-
trycznej. Różnorodność ta jest przyczyną dużych trudności eksploatacyjnych, występujących
zwłaszcza w stanach nieustalonych, jeśli konieczne jest spełnienie podstawowego wymaga-
nia, niezawodnej dostawy energii elektrycznej o określonej jakości i wartości. Trudności te
można w znacznym stopniu pokonać stosując odpowiednie wielopoziomowe układy sterowa-
nia i regulacji procesów wytwarzania, przesyłu i rozdziału energii. Takie centralne i wielopo-
ziomowe kierowanie pracą systemu elektroenergetycznego wymaga bardzo dobrej znajomo-
ści struktur i charakterystyk układów regulacji częstotliwości i napięcia, dwóch podstawo-
wych parametrów jakościowych energii elektrycznej.
Tak więc kierowanie pracą systemu elektroenergetycznego może być rozpatrywane jako
kierowanie złożone z dwóch niezależnych procesów :
1. procesu regulacji częstotliwości powodowanego zmiennością bilansu mocy czynnej,
2. procesu regulacji napięcia powodowanego zmiennością bilansu mocy biernej.

6
2 Ogólna charakterystyka systemu elektroenergetycznego System elektroenergetyczny (SEE) jest to zbiór połączonych ze sobą urządzeń wytwór-
czych, przesyłowych, rozdzielczych i odbiorczych. Jego celem działania jest realizacja proce-
su ciągłej dostawy dla odbiorców energii elektrycznej o odpowiednich parametrach jakościo-
wych i w uzgodnionej ilości. Odbiorcy energii elektrycznej stanowią więc podmiot działania
systemu elektroenergetycznego.
System elektroenergetyczny jest częścią wielonośnikowego systemu energetycznego, w
skład którego wchodzą także systemy: ciepłowniczy, gazo-energetyczny oraz system paliw
stałych i płynnych [1, 7, 21].
System elektroenergetyczny cechuje się następującymi właściwościami:
1. Wytwarzanie, przesył i przetwarzanie energii elektrycznej odbywa się praktycznie
jednocześnie, nie ma pojęcia „magazynowanie energii”. W każdej chwili praca
elektrowni w systemie elektroenergetycznym jest wymuszona przez odbiory i wy-
twarza tyle mocy ile potrzebują odbiorcy energii elektrycznej. Głównym zadaniem
służb energetyki jest ciągłe utrzymywanie w systemie odpowiednich stanów, kon-
figuracji i mocy źródeł w celu zapewnienia pokrywania obciążeń. Szczególnie
wymagana jest wysoka niezawodność pracy systemu elektroenergetycznego, co
pociąga za sobą konieczność stosowania odpowiedniego rezerwowania elementów
systemu oraz wprowadzania w bardzo szerokim zakresie informatyki i automatyki.
2. System elektroenergetyczny jest systemem rozległym terytorialnie obejmującym
całe państwo oraz będącym powiązanym z systemami elektroenergetycznymi in-
nych krajów [9, 16].
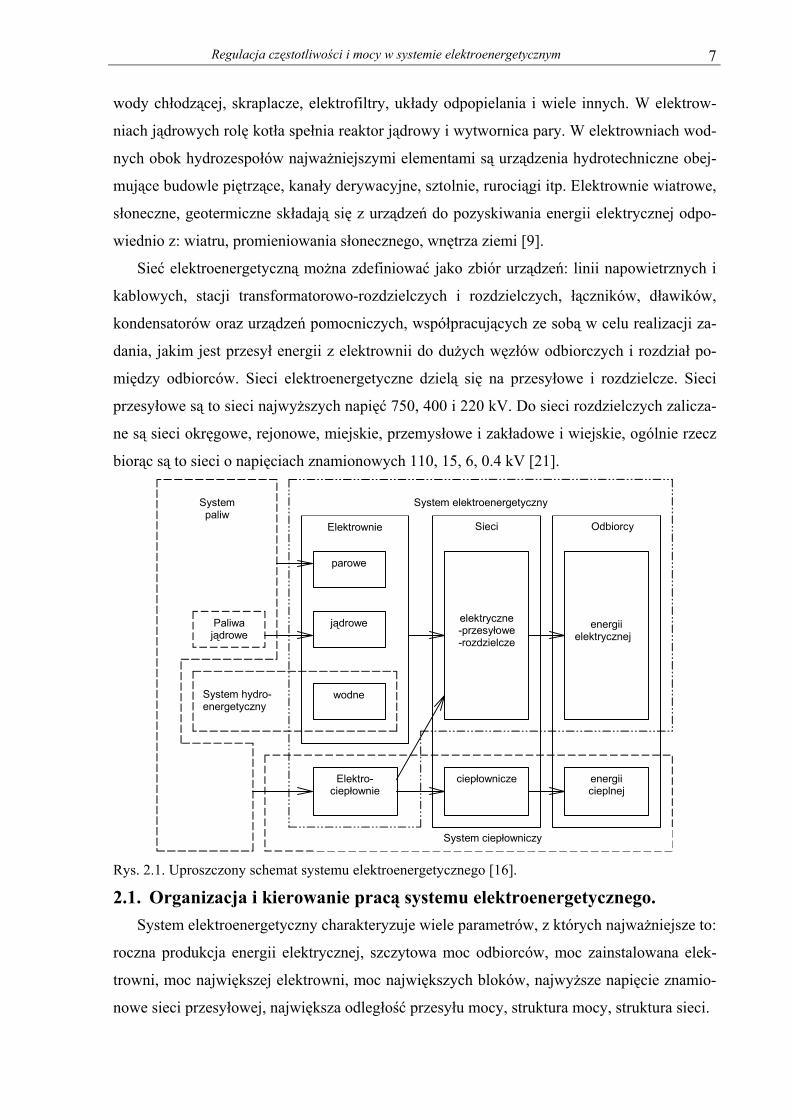
2.1 Budowa systemu elektroenergetycznego. System elektroenergetyczny określa zestaw elementów stanowiących jego składowe czę-
ści i zbiór relacji połączeń wzajemnych tych elementów. W głównym ujęciu system elektro-
energetyczny składa się z trzech części: elektrowni, sieci elektroenergetycznych i odbiorców,
które z kolei złożone są z wielu urządzeń elektroenergetycznych.
Elektrownie dzielą się na: konwencjonalne tj. cieplne, jądrowe, wodne, oraz niekonwen-
cjonalne tj. słoneczne, wiatrowe, geotermiczne. Elektrownie cieplne podzielić można na pa-
rowe, gazowe i gazowo – parowe. Każdy z wymienionych rodzajów elektrowni składa się z
określonych urządzeń stanowiących zespoły wytwórcze i urządzenia potrzeb własnych. W
elektrowniach cieplnych zespół wytwórczy tworzą: kocioł parowy i turbozespół. Urządzeń
potrzeb własnych jest znacznie więcej, jak: pompy wody zasilającej, młyny węglowe, układy
Regulacja częstotliwości i mocy w systemie elektroenergetycznym 7
wody chłodzącej, skraplacze, elektrofiltry, układy odpopielania i wiele innych. W elektrow-
niach jądrowych rolę kotła spełnia reaktor jądrowy i wytwornica pary. W elektrowniach wod-
nych obok hydrozespołów najważniejszymi elementami są urządzenia hydrotechniczne obej-
mujące budowle piętrzące, kanały derywacyjne, sztolnie, rurociągi itp. Elektrownie wiatrowe,
słoneczne, geotermiczne składają się z urządzeń do pozyskiwania energii elektrycznej odpo-
wiednio z: wiatru, promieniowania słonecznego, wnętrza ziemi [9].
Sieć elektroenergetyczną można zdefiniować jako zbiór urządzeń: linii napowietrznych i
kablowych, stacji transformatorowo-rozdzielczych i rozdzielczych, łączników, dławików,
kondensatorów oraz urządzeń pomocniczych, współpracujących ze sobą w celu realizacji za-
dania, jakim jest przesył energii z elektrownii do dużych węzłów odbiorczych i rozdział po-
między odbiorców. Sieci elektroenergetyczne dzielą się na przesyłowe i rozdzielcze. Sieci
przesyłowe są to sieci najwyższych napięć 750, 400 i 220 kV. Do sieci rozdzielczych zalicza-
ne są sieci okręgowe, rejonowe, miejskie, przemysłowe i zakładowe i wiejskie, ogólnie rzecz
biorąc są to sieci o napięciach znamionowych 110, 15, 6, 0.4 kV [21].
Paliwa jądrowe
Elektrownie
Elektro- ciepłownie
ciepłownicze energii cieplnej
wodne
jądrowe
parowe elektryczne-przesyłowe-rozdzielcze
energii elektrycznej
System hydro- energetyczny
System paliw
Sieci Odbiorcy
System elektroenergetyczny
System ciepłowniczy Rys. 2.1. Uproszczony schemat systemu elektroenergetycznego [16].
2.1. Organizacja i kierowanie pracą systemu elektroenergetycznego. System elektroenergetyczny charakteryzuje wiele parametrów, z których najważniejsze to:
roczna produkcja energii elektrycznej, szczytowa moc odbiorców, moc zainstalowana elek-
trowni, moc największej elektrowni, moc największych bloków, najwyższe napięcie znamio-
nowe sieci przesyłowej, największa odległość przesyłu mocy, struktura mocy, struktura sieci.

8
O sposobie pokrywania obciążenia dobowego systemu elektroenergetycznego (rys. 2.2.)
mówi nam struktura mocy, której znajomość daje nam pojęcie o roli i zadaniach poszczegól-
nych rodzajów elektrowni systemowych. Wyróżnić więc można elektrownie podstawowe,
podszczytowe i szczytowe.
Elektrownie podstawowe to nowoczesne elektrownie cieplne parowe, elektrownie jądrowe
oraz elektrownie wodne przepływowe. Do elektrowni podszczytowych i szczytowych należą
starszych typów elektrownie cieplne parowe, elektrownie wodne zbiornikowe, zaś do elek-
trowni szczytowych zalicza się także elektrownie wodne pompowe oraz elektrownie z turbi-
nami gazowymi. Podane powyżej grupy elektrowni różnią się znacznie czasem wykorzystania
mocy osiągalnej, które wynoszą odpowiednio [9, 21]:
elektrownie podstawowe - ≥ 5500 h/a;
elektrownie podszczytowe - 3000 ÷ 5500 h/a;
elektrownie szczytowe - ≤ 3000 h/a.
∆t4
Pd
t[h]24
∆t1 ∆t2 ∆t3 ∆t5
c1c2
b
a
Rys. 2.2. Pokrywanie obciążenia dobowego SEE przez elektrownie [9].
a – podstawowe, b – podszczytowe, c1 + c2 – szczytowe; Pd(t) – dobowy przebieg obciążenia z okre-sami: ∆t1 + ∆t5 – doliny nocnej obciążenia, ∆t2 – szczytu rannego, ∆t3 – doliny południowej, ∆t4 – szczytu wieczornego.
Struktura sieci jest wynikiem sposobów połączenia elementów systemu elektroenerge-
tycznego. Elektrownie przyłączane są do sieci o napięciach znamionowych 400, 220 i 110
kV. Energia elektryczna z elektrownia przesyłana jest liniami przesyłowymi przez stacje
transformatorowe sieciowe do rejonowej sieci rozdzielczej o napięciu 110 kV i rozprowadza-
na do punktów zasilających sieci rozdzielcze średniego napięcia 15, 20, 30 kV, które z kolei
rozprowadzają energię do stacji zasilających sieci niskiego napięcia 0.4 kV, do których bez-
pośrednio przyłączane są odbiorniki. Odbiorniki większych mocy przyłączane są do sieci o

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 9
napięciu 6 lub 10 kV, rzadziej 15 kV; które także mogą być zasilane z własnych elektrowni
zakładów przemysłowych.
Jak wynika z powyższego opisu cały system elektroenergetyczny jest obiektem o bardzo
złożonej wielopoziomowej strukturze, która wymaga ciągłej kontroli i odpowiedniego stero-
wania. W sterowaniu pracą systemu elektroenergetycznego wyróżnia się dwa systemy: zarzą-
dzania i system kierowania (rys. 2.3).
Sterowanie pracą systemu elektroenergetycznego odbywa się z następujących poziomów:
1. Elektrowni i stacji elektroenergetycznych.
2. Dyspozycji mocy i dyspozycji ruchu.
Sterowanie z poziomu elektrowni i stacji elektroenergetycznych odbywa się poprzez na-
stawnie cieplno – elektryczne, w które w nowoczesnych elektrowniach wyposażone są
wszystkie bloki wytwórcze.
Obecnie w naszym kraju stosowany jest hierarchiczny, czterostopniowy system dyspozy-
cji mocy i ruchu. Pierwszy z nich to Krajowa Dyspozycja Mocy (KDM), a drugim są Obsza-
rowe Dyspozycje Mocy (ODM, jest ich 5). Obszarowym Dyspozycjom Mocy podlegają Za-
kładowe Dyspozycje Ruchu (ZDR), którym zaś podlegają Rejonowe Dyspozycje Ruchu
(RDR).
Mamy dwa działy w których odbywa się praca dyspozycji mocy:
1. Przygotowawczy; - jest to dział w którym z różnymi wyprzedzeniami czasowymi
przygotowuje się konfiguracje i stany pracy systemu elektroenergetycznego. Są to np.
okresy przygotowania i przeprowadzania remontów bloków wytwórczych, postoje i
uruchomienia bloków, przewidywane obciążenia.
2. Dyspozycyjny; - dział ten podejmuje decyzje o działaniu w aktualnych sytuacjach ru-
chowych na podstawie danych dostarczanych przez układy telemechaniki i dział przy-
gotowawczy.

10
M
inis
ters
two
gosp
odar
ki
Polskie Sieci Elektroenergetyczne
(PSE)
Krajowa Dyspozycja Mocy
(KDM)
StacjeNn.
Elektrowniewodne
Oddziały eksploatacji
sieci przesyłowych
Obszarowa Dyspozycja Mocy
(ODM)
Elektrowniecieplne
DIRE
Dyspozytor bloku
Stacje Nn/110
Zakład Energetyczny S.A.
Struktura zarządzania
Struktura bezpośredniego kierowania pracą systemu
Rejon Energetyczny
Posterunek Energetyczny
Zakładowa Dyspozycja Ruchu
Rejonowa Dyspozycja Ruchu
Stacje 110/SN
Rys. 2.3. Schemat zarządzania i kierowania w krajowym systemem elektroenergetycznym (stan w 1997 r.) [16].

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 11
Działania podejmowane przez personel elektrowni odbywają się na polecenie dyspozycji
mocy, bądź też wymagają jej zgody. Bezpośrednią kontrolą pracy systemu elektroenergetycz-
nego zajmują się dyspozytorzy, do zadań których należy:
- zadawanie elektrowniom obciążeń;
- kontrola rozpływów mocy;
- korygowanie konfiguracji sieci;
- decyzje o mocy wymienianej – nieplanowany zakup lub sprzedaż energii.
W sterowaniu pracą systemu elektroenergetycznego bardzo dużą pomocą służą wykorzy-
stywane systemy komputerowe stosowane w bardzo szerokim zakresie. Wykorzystuje się je
do zbierania danych, opracowywania prognoz obciążenia, przedstawiania w czasie rzeczywi-
stym konfiguracji sieci, obciążeń linii, mocy elektrowni , położeń łączników itd.
Także elektrownie, dla poprawnej eksploatacji i pracy, potrzebują odpowiednio zorgani-
zowanego systemu zarządzania. W organizacji pracy elektrowni mamy dwa piony:
1. Pion administracyjno – ekonomiczny.
2. Pion obsługi urządzeń (pion głównego inżyniera elektrowni).
Na podstawie rysunku 2.4. możemy dokonać krótkiej charakterystyki funkcjonowania
elektrowni.
Za całość działań elektrownia odpowiada dyrektor elektrowni, który do swojej bezpośred-
niej dyspozycji ma kilka pomocniczych komórek, które swoją działalnością obejmują: sprawy
bhp, zatrudnienie i szkolenie zawodowe, doradztwo prawne itp.
W przypadku pionu administracyjno – ekonomicznego, przeznaczenie i funkcje jego dzia-
łów najlepiej przedstawiają ich nazwy. Pion obsługi urządzeń podzielony jest według trzech
zasadniczych zadań:
- bezpośrednia eksploatacja urządzeń (Dział Ruchu)
- kontrola eksploatacji
- remonty urządzeń.
Dział Ruchu jest odpowiedzialny za wszystkie urządzenia, zarówno te pracujące jak i bę-
dące w rezerwie, oraz za personel użytkujący te urządzenia. Jedną z ważniejszych funkcji w
elektrowni pełni Dyżurny Inżynier Pracy Elektrowni (DIRE). Jest to osoba odpowiadająca za
poprawną pracę wszystkich użytkowanych układów i urządzeń oraz za pracę personelu dy-
żurnego. DIRE podlega operatywnie Obszarowemu Dyspozytorowi Mocy. DIRE jest osobą,
która na popołudniowej i nocnej zmianie odpowiada za całokształt pracy elektrowni, repre-
zentuje wówczas dyrekcje elektrowni. Dział Ruchu Bloków eksploatuje urządzenia bloku po-
cząwszy od przykotłowego zasobnika węgla do zacisków generatora, łącznie ze sterowaniem
12
wyłącznikami blokowymi i urządzeniami potrzeb własnych. Pracę urządzeń blokowych i per-
sonelu obsługującego nadzoruje Kierownik Bloku. Kontrolę nad eksploatacją urządzeń i pracą
personelu obsługującego prowadzi Dział Kontroli Eksploatacji. Dział ten odpowiada za in-
strukcje eksploatacji urządzeń, organizuje okresowe pomiary i badania urządzeń itp. Dział
Remontów jest działem odpowiadającym za konserwacje naprawy i remonty wszystkich
urządzeń i budynków na terenie elektrowni [9, 16, 21].
3 System elektroenergetyczny jako obiekt regulacji częstotliwo-ści i mocy.
3.1. Zmiany częstotliwości w systemie elektroenergetycznym, ich przyczyny i skutki.
3.1.1. Obciążenie systemu elektroenergetycznego.
Przez moc obciążenia systemu elektroenergetycznego Podb należy rozumieć zapotrzebo-
wanie na moc czynną pobieraną przez odbiorniki energii elektrycznej przyłączone do sieci
elektroenergetycznej. Przy pominięciu strat mocy czynnej, można użyć stwierdzenia, że w
stanie ustalonym moc obciążenia systemu jest to suma mocy pobieranej z zacisków generato-
rów pracujących w danej chwili w systemie elektroenergetycznym.
Moc obciążenia w systemie elektroenergetycznym ulega ciągłym zmianom, które można
sklasyfikować w następujący sposób:
- Zmiany wynikające z przebiegu krzywych dobowej zmienności obciążenia; zmia-
ny te mogą dochodzić nawet do 50% mocy szczytowej obciążenia danej doby.
Dobowe zmiany obciążenia zachodzą dość wolno i w taki sposób, że mogą być
one określane statystycznie z dużą dokładnością, w zależności od stosowanych
metod obliczeniowych.
- Zmiany mocy obciążenia o niedużej wartości i krótkim czasie trwania związane
z załączaniem lub wyłączaniem różnego rodzaju odbiorników.
- Przypadkowe duże zmiany mocy obciążenia związane z nagłymi stanami awaryj-
nymi np. awaryjnym odłączeniem części systemu z dużą grupą odbiorów.
- Drobne zmiany mocy o oscylacyjnym charakterze związane z przerywaną pracą od-
biorników. Wartość tych zmian jest bardzo mała, zaś częstość stosunkowo duża.
W większości przypadków omówione powyżej rodzaje zmian mocy obciążenia wzajem-
nie nakładają się na siebie [11].

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 13
3.1.2. Moc wytwarzana w systemie elektroenergetycznym.
Moc wytwarzana PT jest to moc mechaniczna na wale turbiny zespołu wytwórczego. Po-
mijając straty mocy czynnej można założyć, że w stanach ustalonych moc wytwarzana PT jest
równa mocy mierzonej na zaciskach generatora PG. Moc wytwarzana w systemie elektroener-
getycznym jest sumą mocy wytwarzanych przez poszczególne bloki elektroenergetyczne pra-
cujące w danej chwili w systemie.
Zmiany mocy wytwarzanej zależą od zdolności regulacyjnych i parametrów poszczególnych
rodzajów bloków wytwórczych:
- W turbozespołach parowych szybkie zmiany mocy wytwarzanej ze względu na
ograniczenia technologiczne są ograniczone do przedziału nie przekraczającego ±
5% znamionowej mocy bloku. Dalsze zmiany mocy wytwarzanej przekraczające
te tzw. pasmo szybkiej regulacji mogą być dokonywane z prędkością zależną od
stanu ruchowego turbiny.
- W hydrozespołach zmiany mocy wytwarzanej mogą zachodzić z dużo większą
prędkością w całym zakresie mocy znamionowej zespołu wytwórczego.
W pracy systemu elektroenergetycznego należy liczyć się ze zmianami mocy wytwarza-
nej, związanymi z awaryjnymi odstawieniami poszczególnych bloków bądź całych elektrowni
[11].
3.1.3. Zmiany częstotliwości w systemie elektroenergetycznym.
Częstotliwość jest jednym z najważniejszych parametrów systemu elektroenergetycznego.
W systemie elektroenergetycznym, przy pominięciu strat, w stanie ustalonym moc wytwarza-
na pracujących generatorów jest równa sumie mocy pobieranych z tegoż systemu PG = Podb.
Częstotliwość w systemie wynosi wówczas 50 Hz. Naruszenie opisanego powyżej stanu rów-
nowagi, czy to przez zmianę mocy odbiorów, czy przez zmianę mocy wytwarzanej, spowo-
duje zmianę prędkości wirowania wszystkich maszyn obrotowych pracujących w danej chwili
w systemie, zarówno zespołów prądotwórczych (generatorów) jak i silników u odbiorców,
przez zmianę energii kinetycznej ich mas wirujących. Wynikiem tego są zmiany częstotliwo-
ści w systemie elektroenergetycznym. W przypadku wzrostu mocy obciążenia lub zmniejsze-
niu się z różnych przyczyn mocy wytwarzanej , czyli w przypadku przerostu mocy obciążenia
nad mocą wytwarzaną następuje malenie częstotliwości, w przeciwnym razie następuje w
wzrost częstotliwości w systemie elektroenergetycznym.
Praca systemu elektroenergetycznego ze znacznie mniejszą jak i ze znacznie większą czę-
stotliwością jest z wielu względów szkodliwa i niedopuszczalna [14].
14
1. Skutki obniżenia częstotliwości:
- Przy spadku częstotliwości poniżej 49,5 Hz, niektóre pierścienie łopatek turbino-
wych zaczynają drgać, co może wpływać na wibracyjne zmęczenie materiałów, a
nawet doprowadzić do zniszczenia łopat turbin.
- Przy spadku częstotliwości poniżej 49,0 Hz, następuje całkowite otwarcie dopły-
wu pary do turbiny, a jej obciążenie osiąga znamionową wartość. Dalsze malenie
częstotliwości obniża wydajność urządzeń potrzeb własnych elektrowni głównie
pomp zasilających i wentylatorów, w których wydajność zależy nawet od czwar-
tej potęgi częstotliwości.
- Obniżona częstotliwość źle wpływa na pracę agregatów prądotwórczych odbior-
ców co źle wpływa na jakość produkcji np. walcownie blachy, fabryki papieru,
przędzalnie włókien sztucznych dają produkty zbyt grube nie spełniające dopusz-
czalnych tolerancji.
2. Skutki podwyższenia częstotliwości:
- W wyniku wzrostu częstotliwości rosną straty w żelazie i przegrzewają się
wszystkie obwody magnetyczne silników i transformatorów.
- Wzrost częstotliwości zwiększa niekorzystnie prędkość obrotową agregatów prą-
dotwórczych u odbiorców naruszając wymogi technologiczne produkcji.
- Wszelkie odbiorniki oporowe np. żarówki pracując przy zwiększonej częstotliwo-
ści ulegają przedwczesnemu zużyciu [14].
Poza tym zmiany częstotliwości mają istotny wpływ na wymianę mocy pomiędzy syste-
mami.
3.2. Charakterystyki statyczne. 3.1.1 Charakterystyki statyczne odbiorów mocy czynnej.
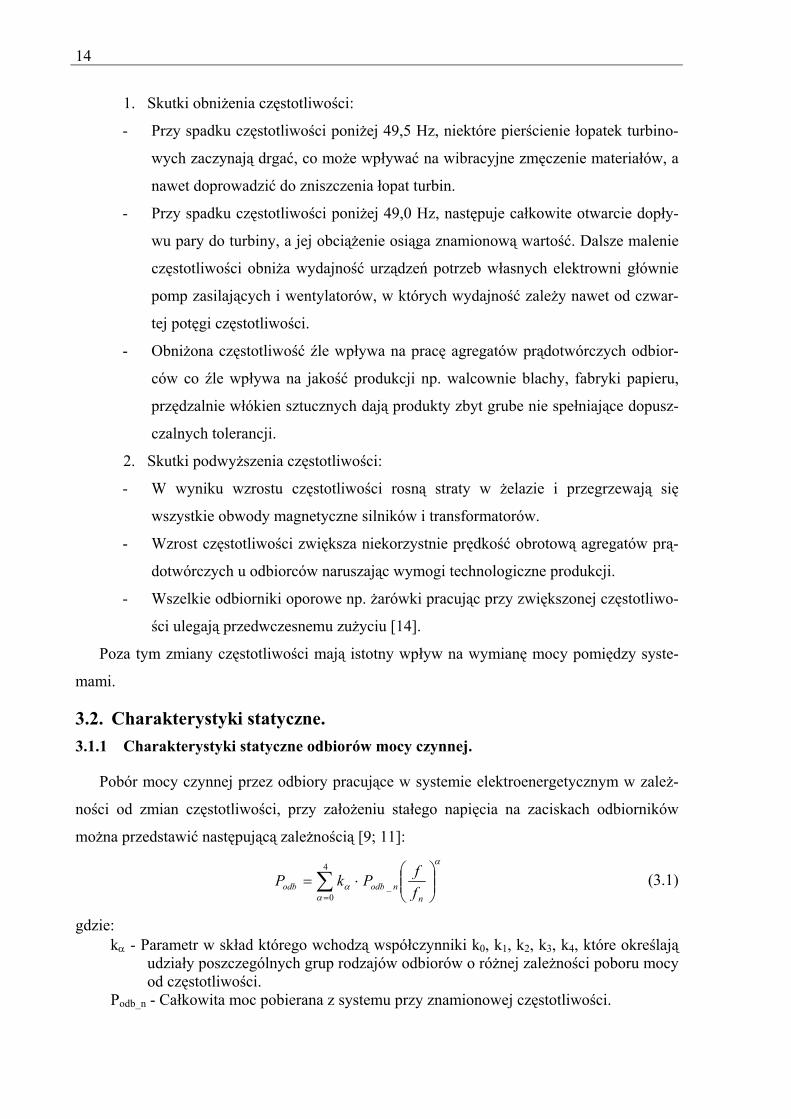
Pobór mocy czynnej przez odbiory pracujące w systemie elektroenergetycznym w zależ-
ności od zmian częstotliwości, przy założeniu stałego napięcia na zaciskach odbiorników
można przedstawić następującą zależnością [9; 11]:
∑=
⋅=
4
0_
α
α
αn
nodbodb ffPkP (3.1)
gdzie: kα - Parametr w skład którego wchodzą współczynniki k0, k1, k2, k3, k4, które określają
udziały poszczególnych grup rodzajów odbiorów o różnej zależności poboru mocy od częstotliwości.
Podb_n - Całkowita moc pobierana z systemu przy znamionowej częstotliwości.

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 15
fn - Częstotliwość znamionowa. f - Częstotliwość rzeczywista.
α - Wykładnik potęgowy zależny od rodzaju odbioru i określający zależność po-bieranej mocy od częstotliwości. W zależności od rodzaju odbiorów wykład-nik ten przyjmuje następujące wartości:
α = 0 – moc pobierana przez odbiory nie zależy od częstotliwości; są to głównie odbiory oświetleniowe, grzejne oporowe i trakcyjne prądu stałego.
α = 1 – pobór mocy przez odbiory jest wprost proporcjonalny do częstotli-wości; zaliczyć tu można między innymi: prasy, napędy dźwigów, urządze-nia obrabiające i transportery.
α = 2 – pobór mocy zależy od kwadratu częstotliwości; dotyczy to głównie strat mocy czynnej w systemie elektroenergetycznym.
α = 3 – pobór mocy jest proporcjonalny do trzeciej potęgi częstotliwości; są to wentylatory, pompy rotodynamiczne, dmuchawy.
α = 4 – pobór mocy zależy od czwartej potęgi częstotliwości; np. pompy za-silające kotły energetyczne.
Po rozpisaniu równania (3.1) mamy:
⋅+
⋅+
⋅+
⋅+
⋅⋅=
4
4
3
3
2
2
1
1
0
0_nnnnn
nodbodb ffk
ffk
ffk
ffk
ffkPP (3.2)
W przypadku niewielkich zmian częstotliwości od ok. 48 ÷ 52 Hz zależność pobieranej z
systemu elektroenergetycznego mocy czynnej Podb od częstotliwości można wyrazić za po-
mocą następującego równania liniowego:
fKPP Lnodbodb ∆⋅+= _ (3.3)
gdzie:
KL – współczynnik zwany energią regulującą mocy pobieranej, wyraża stosunek zmian mocy pobieranej ∆Podb [MW] od zmian częstotliwości ∆f [Hz]
f
PK odb
L ∆∆
= (3.4)
gdzie:
odbnodbodb PPP −=∆ _ ; zmiana mocy pobieranej (3.5)
; zmiana częstotliwości w systemie (3.6) fff n −=∆
Po zróżniczkowaniu równania (3.2) względem częstotliwości otrzymujemy:
⋅+
⋅+
⋅+⋅=
∆∆
≈3
4
2
321_ 432
nnnn
nodbodbodb
ffk
ffk
ffkk
fP
fP
dfdP (3.7)
Dla f = fn współczynnik KL przyjmuje następującą postać:
( 4321_ 432 kkkk
fP
Kn
nodbL +++⋅= ) (3.8)
16
Ostatnia postać współczynnika KL z równania (3.8) przedstawia nam względne zmiany
poboru mocy czynnej, przypadające na jednostkową zmianę częstotliwości. Dobrze jest znać
ten współczynnik, gdyż wówczas mamy możliwość ocenienia wpływu mocy obciążenia na
regulację częstotliwości. W polskim systemie elektroenergetycznym wartości współczynnika
KL wynoszą przeciętnie od 1,6 do 3 (j.w.) [11].
f
fn
f1
Podb Podb_n
∆Podb
Podb_1
Rys. 3.1. Charakterystyka statyczna obciążenia systemu linearyzowana dla niewielkich zmian częstotliwości [11].
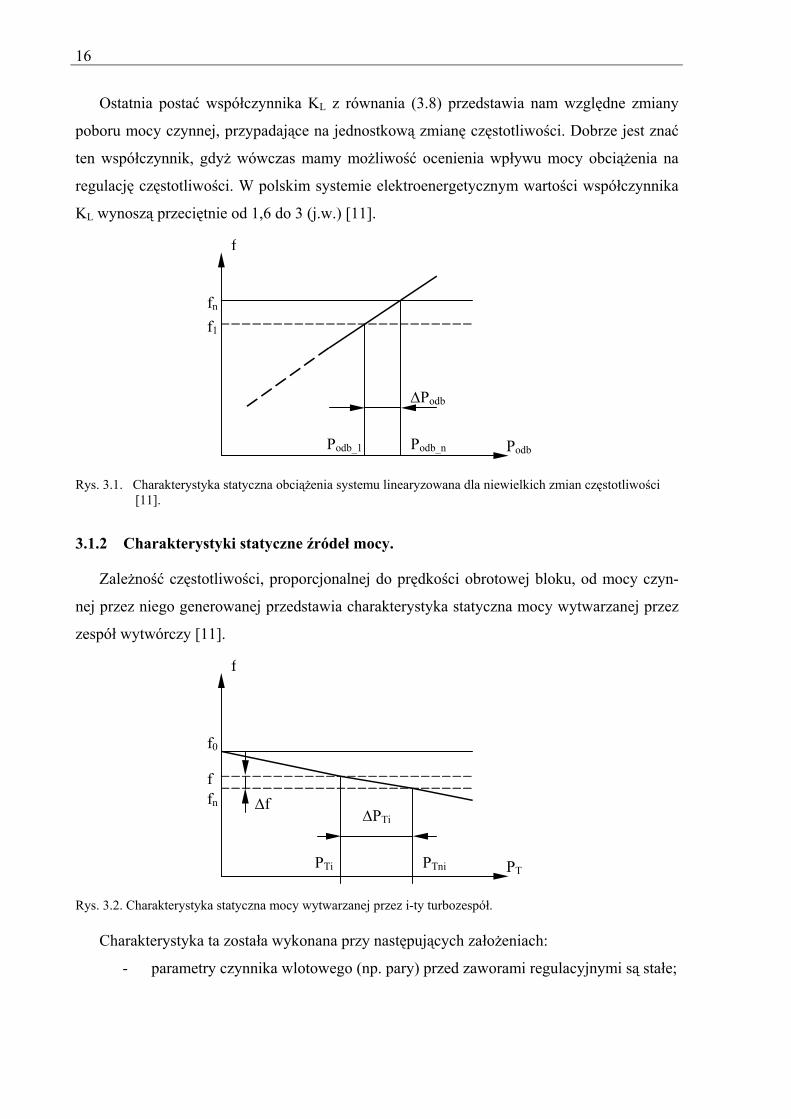
3.1.2 Charakterystyki statyczne źródeł mocy.
Zależność częstotliwości, proporcjonalnej do prędkości obrotowej bloku, od mocy czyn-
nej przez niego generowanej przedstawia charakterystyka statyczna mocy wytwarzanej przez
zespół wytwórczy [11].
f
fn
f
PT PTni
f0
PTi
∆PTi ∆f
Rys. 3.2. Charakterystyka statyczna mocy wytwarzanej przez i-ty turbozespół.
Charakterystyka ta została wykonana przy następujących założeniach:
- parametry czynnika wlotowego (np. pary) przed zaworami regulacyjnymi są stałe;

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 17
- moc wytwarzana przez zespół wytwórczy jest proporcjonalna do stopnia otwarcia
zaworów wlotowych turbiny, które jest zmieniane proporcjonalne do częstotliwo-
ści (prędkości obrotowej zespołu).
Nachylenie charakterystyki widocznej na rys. 3.2. zwane potocznie statyzmem regulacji
jest wielkością stosunkową odniesioną do znamionowych: wartości częstotliwości fn i mocy
wytwarzanej PTni. Wyznacza się ją z następującej zależności:
TniTi
nTi PP
ff//
∆∆
=δ (3.9)
gdzie: δTi – nachylenie charakterystyki statycznej i-tego zespołu wytwórczego;
– zmiana mocy wytwarzanej przez i-ty zespół wytwórczy; (3.10) TiTniTi PPP −=∆ ∆f – jak w równaniu (3.6); W przypadku całego systemu elektroenergetycznego charakterystykę statyczną mocy wy-
twarzanej można określić jeśli znane są statyzmy regulacji poszczególnych zespołów w nim
pracujących:
Tni
iTi
nS PP
ff/
/
∑ ∆∆
=δ (3.11)
gdzie: δS – nachylenie charakterystyki statycznej wytwarzania; – sumaryczne zmiany mocy wytwarzanej w systemie; ∑ ∆
iTiP
∆f – jak w równaniu (3.6);
Odwrotności współczynników δTi i δS nazywamy odpowiednio: energia regulującą wy-
twarzania i-tego zespołu KTi oraz energią regulującą wytwarzania wszystkich źródeł w danym
systemie elektroenergetycznym KT. Wyrażają się one następująco:
n
Tni
TiTi f
PK ⋅=δ1 (3.12)
∑
⋅∆
∆−=
iTni
nTiT P
ff
PK (3.13)
Znak minus we wzorze (3.13) określa właściwości regulacyjne źródeł mocy wytwarzania
w danym systemie elektroenergetycznym i oznacza wzrost mocy wytwarzania przy zmniej-
szaniu częstotliwości w systemie.

18
3.1.3 Charakterystyki statyczne systemu elektroenergetycznego.
W przypadku systemu elektroenergetycznego charakterystykę statyczną częstotliwość –
moc czynna otrzymamy znając charakterystykę statyczną mocy pobieranej z systemu f =
F(Podb) i charakterystykę statyczną mocy wytwarzanej w systemie f = G(PT). Konstrukcję wy-
padkowej charakterystyki statycznej systemu, uwzględniającą łączny wpływ źródeł mocy i
mocy pobieranej w systemie na jego częstotliwość pokazuje rys. 3.3.
f
fn
PT
ΣPTni
f0 f = G(PT) f = F(Podb)
Rys. 3.3. Charakterystyka statyczna systemu elektroenergetycznego. Poszczególne charakterystyki przecinają się w punkcie stanowiącym punkt pracy ustalo-
nej systemu, któremu odpowiada częstotliwość znamionowa fn. Jako moc odniesienia przyj-
muje się sumaryczną moc pobieraną przez odbiory danego systemu przy znamionowej często-
tliwości lub sumę mocy znamionowych zespołów wirujących w systemie [11]. Z charaktery-
styką statyczną systemu związany jest wypadkowy współczynnik energii regulującej systemu
określony wzorem (3.14).
odbTS KKK −= (3.14)
Przy sumowaniu obu współczynników niezbędne jest aby były one określone dla tej samej
wartości odniesienia.
3.3. Regulacja pierwotna i wtórna częstotliwości i mocy czynnej w systemie elektroenergetycznym.
W ustalonym stanie pracy, dzięki specyficznym właściwościom maszyn synchronicznych,
w całym systemie elektroenergetycznym częstotliwość jest jednakowa, a jej wartość zależy od
aktualnego zbilansowania mocy zapotrzebowanej przez odbiory Podb i mocy wytwarzanej PT
przez pracujące aktualnie elektrownie w systemie.
Początkowy stan równowagi systemu elektroenergetycznego jest określony częstotliwo-
ścią fn = 50 Hz. Jeżeli w systemie, z różnych przyczyn, nastąpi przewaga jednej z mocy nad

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 19
drugą, to przebieg powstałego w ten sposób stanu nieustalonego podzielić można na cztery
fazy, których kolejność jest następująca:
- kołysania wirników generatorów pracujących w systemie elektroenergetycznych;
- zmiana częstotliwości w systemie elektroenergetycznym;
- działanie regulatorów prędkości obrotowej bloków wytwórczych (regulacja pierwotna);
- działanie regulatorów centralnych (regulacja wtórna).
Załóżmy, że w systemie elektroenergetycznym wzrasta pobór mocy czynnej. Dodatkowe ob-
ciążenie, jakie przyjmuje na siebie system powoduje zmniejszenie jego energii kinetycznej
zmagazynowanej w masach wirujących powodując powolne zmniejszanie się prędkości obro-
towej wirników wszystkich generatorów pracujących w systemie w danej chwili, co oznacza
zmniejszanie się częstotliwości w systemie. Kolejna fazą stanu nieustalonego dotyczy reakcji
zespołów wytwórczych oraz odbiorów na spadek częstotliwości w systemie (p. 3.2.). W
przedstawionym przypadku regulatory turbin otwierają zawory regulacyjne zwiększając prze-
pływ czynnika napędowego, wskutek czego moce turbin wzrastają. Ostatnia faza stanu nie-
ustalonego będąca wynikiem zaburzenia bilansu mocy czynnej dotyczy reakcji regulatora
centralnego na zmniejszenie się częstotliwości i zmianę mocy wymiany międzysystemowej
[17].
Regulacja pierwotna bloków wytwórczych dokonywana poprzez ich regulatory prędkości
obrotowej polega na zmianach generowanych przez nie mocy czynnych zgodnie z ich indy-
widualnymi charakterystykami statycznymi wytwarzania.
n
Tni
TioiTTioiTTi f
PffPKffPP ⋅⋅−+=⋅−+=δ1)()( 00 (3.15)
gdzie:
PTi – moc wytwarzana przez i-ty zespół wytwórczy; PT0i – moc wytwarzana przez i-ty zespół wytwórczy w stanie ustalonym przy częstotli-
wości fo; KTi – energia regulująca i-tego zespołu wytwórczego (3.12). Zmianę mocy wytwarzanej w systemie spowodowana działaniem regulacji pierwotnej
można określić następująco:
fKP Ti
Ti ∆⋅−=∆∑ (3.16)
gdzie:
– suma zmian mocy wytwarzanej przez zespoły wytwórcze pracujące w syste-
mie, będąca wynikiem działania regulacji pierwotnej;
∑∆i
TiP
KT – energia regulująca systemu elektroenergetycznego (3.13).
20
W wyniku działania regulacji pierwotnej moc wytwarzana zostaje zrównoważona z aktualną
mocą obciążenia systemu elektroenergetycznego przy nowej częstotliwości f, odchylonej od
częstotliwości początkowej fo o ∆f.
Regulacja wtórna, jest regulacją polegającą na oddziaływaniu na odpowiednie bloki wy-
twórcze danego systemu elektroenergetycznego w taki sposób, aby odchylenie regulacyjne
(3.17) dążyło do zera.
0=∆⋅+− ∑∑ fkPP Ri
Tzadii
Ti (3.17)
gdzie: – suma mocy wytwarzanych równa aktualnemu obciążeniu systemu; ∑
iTiP
– suma mocy zadanych równa przewidywanej mocy obciążenia systemu; ∑i
TzadiP
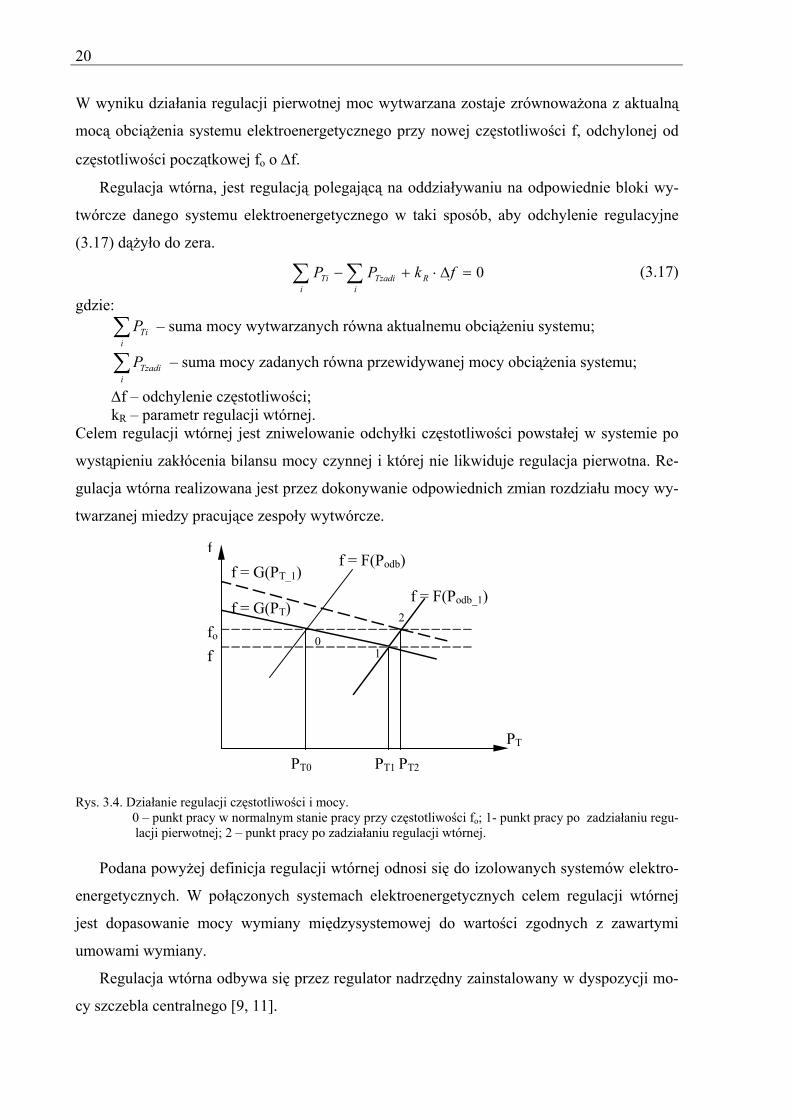
∆f – odchylenie częstotliwości; kR – parametr regulacji wtórnej. Celem regulacji wtórnej jest zniwelowanie odchyłki częstotliwości powstałej w systemie po
wystąpieniu zakłócenia bilansu mocy czynnej i której nie likwiduje regulacja pierwotna. Re-
gulacja wtórna realizowana jest przez dokonywanie odpowiednich zmian rozdziału mocy wy-
twarzanej miedzy pracujące zespoły wytwórcze.
f
f
PT
PT1
f = G(PT) f = F(Podb_1)
f = F(Podb)
fo
PT2 PT0
1
2
f = G(PT_1)
0
Rys. 3.4. Działanie regulacji częstotliwości i mocy.
0 – punkt pracy w normalnym stanie pracy przy częstotliwości fo; 1- punkt pracy po zadziałaniu regu-lacji pierwotnej; 2 – punkt pracy po zadziałaniu regulacji wtórnej.
Podana powyżej definicja regulacji wtórnej odnosi się do izolowanych systemów elektro-
energetycznych. W połączonych systemach elektroenergetycznych celem regulacji wtórnej
jest dopasowanie mocy wymiany międzysystemowej do wartości zgodnych z zawartymi
umowami wymiany.
Regulacja wtórna odbywa się przez regulator nadrzędny zainstalowany w dyspozycji mo-
cy szczebla centralnego [9, 11].

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 21
3.1.4 Regulacja częstotliwości i mocy czynnej w izolowanym systemie elektroenerge-
tycznym.
Duże systemy elektroenergetyczne składają się z powiązanych wzajemnie podsystemów.
Ich praca podporządkowana jest Krajowej Dyspozycji Mocy i musi spełniać wymagania eko-
nomicznego rozdziału obciążeń oraz wymagania technicznych ograniczeń przesyłu w obrębie
całego systemu. Praca systemów elektroenergetycznych bez połączeń z systemami sąsiednimi
należy obecnie do rzadkości, a realizacja ich regulacji częstotliwości i mocy opiera się na na-
stępujących zasadach:
- udział możliwie największej liczby zespołów wytwórczych;
- jak najmniejsza liczba zadziałań regulacyjnych;
- wciąganie do pracy regulacyjnej zespołów pracujących normalnie przy stałej war-
tości mocy zadanej, w przypadku braku mocy regulacyjnej;
- uzyskiwanie mocy regulacyjnej zespołów zgodnie z ich możliwościami technicz-
nymi;
- stabilność pracy równoległej zespołów nie może zostać naruszona w wyniku
zmian przepływu mocy w obrębie systemu elektroenergetycznego;
- udział w regulacji wszystkich podsystemów zgodnie z przyjętym programem.
W przypadku wystąpienia zakłócenia bilansu mocy czynnej w izolowanym systemie elektro-
energetycznym, powstaje zmiana jego częstotliwości. Jeżeli tylko odchylenie częstotliwości w
systemie przekroczy wartość odpowiadającą strefie nieczułości regulatorów prędkości obro-
towej poszczególnych zespołów wytwórczych, to spowodują one zmiany otwarcia zaworów
regulacyjnych i zmiany mocy wytwarzanej w systemie w kierunku zrównania bilansu mocy w
systemie, zgodnie z charakterystykami statycznymi wytwarzania poszczególnych zespołów.
Rozkład „pierwotnej” mocy regulacyjnej między zespoły pracujące w systemie elektro-
energetycznym może być całkiem przypadkowy, zależnie od nachylenia charakterystyk sta-
tycznych, które są różne dla poszczególnych zespołów wytwórczych. Zależnie od wartości
mocy uprzednio wytwarzanych przez poszczególne zespoły mogą wystąpić niedopuszczalne
przeciążenia bloków wytwórczych. Lokalne, ręczne lub automatyczne działanie regulacji
wtórnej w kierunku dostosowania mocy wytwarzanych do aktualnych warunków eksploatacji
poszczególnych zespołów może nie doprowadzić do przywrócenia częstotliwości w systemie
do wartości występującej przed zakłóceniem. Stąd też niezbędne jest nadrzędne sterowanie
centralne wypracowujące sygnały regulacji wtórnej, wyznaczających zadane wartości mocy
wytwarzanej przez poszczególne zespoły.

22
Realizowana przez nadrzędny regulator systemowy najbardziej powszechna metoda regulacji
częstotliwości i mocy polega na takim oddziaływaniu na zespoły biorące udział w regulacji
aby dwumian (3.18) odchylenia częstotliwości i mocy w systemie był jak najbliższy zeru.
01=∆⋅+∆ P
Kf
S
(3.18)
gdzie:
∆f = f - fzad – odchylenie częstotliwości f od wartości zadanej; ∆P = ∆PT - ∆Podb – arytmetyczna suma zmiany mocy wytwarzanej ∆PT i zmiany mocy
pobieranej ∆Podb od wartości mocy w stanie ustalonym; KS – energia regulująca systemu.
Idealne spełnienie warunku (3.18) jest niemożliwe. Odchylenie dwumianu od zera stano-
wi systemowe odchylenie regulacyjne ∆PsR, mogące być wyrażane w MW po przekształceniu
równania (3.18) do postaci:
PfKP SsR ∆+∆⋅=∆ (3.19)
Ponieważ w izolowanym systemie elektroenergetycznym bardzo trudno jest dokonać po-
miaru sygnału regulacji mocy ∆P jako systemowe odchylenie regulacyjne przyjmuje się od-
chylenie wywołane zmianą częstotliwości:
)( zadSsR ffKP −⋅=∆ (3.20)
Zależność (3.20) oparta jest na założeniu, że całkowita moc wymieniana w systemie jest
równa zeru.
Możemy powiedzieć, że systemowe odchylenie regulacyjne ∆PsR jest wartością, o jaką na-
leży zmienić sumaryczną moc wytwarzaną w izolowanym systemie elektroenergetycznym,
aby częstotliwość f doprowadzić do wartości zadanej fzad. Zmiana ta jest sumą zmian mocy
wytwarzanej zespołów biorących udział w nadrzędnej regulacji częstotliwości i mocy [11].
3.1.5 Regulacja częstotliwości i mocy czynnej w połączonych systemach elektroenerge-
tycznych.
Regulacja częstotliwości i mocy wymiany między wielkimi coraz silniej powiązanymi
między sobą systemami stwarza całkiem nowe problemy realizacyjne. Wymiana mocy mię-
dzy systemami ma na celu:
- wyrównanie deficytów bądź nadwyżek mocy i energii występujących okresowo,
lecz przewidzianych w planach produkcji współpracujących systemów;
- pomoc interwencyjną w przypadku nieplanowanych niedoborów mocy w jednym
z współpracujących systemów;

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 23
- zmniejszenie niezbędnej rezerwy mocy w każdym z współpracujących systemów
przez zaplanowaną wymianę mocy w szczytowych okresach obciążenia.
Wymiana międzysystemowa odbywa się poprzez linie najwyższych napięć, zaś regulacja
mocy wymiany odbywa się za pomocą nadrzędnych regulatorów centralnych należących do
współpracujących systemów.
Wymiana międzysystemowa jest określona programem zawierającym uzgodnione para-
metry techniczne mocy wymiany i ich dopuszczalne odchyłki, które stanowią podstawę do
zawarcia umowy handlowej zawierającej zasady rozliczeniowe jak i konsekwencje finansowe
wynikające z niedotrzymania warunków programu wymiany. Najważniejsze parametry wy-
miany międzysystemowej to:
- odchyłka między wartością energii wymienianej ustalonej programem wymiany, a
rzeczywistą wartością energii wymienianej w określonym czasie;
(3.21) dtPPEt
pzpp ∫ −=∆0
)(
- odchyłka częstotliwości od wartości znamionowej 50 Hz powoduje powstanie
błędu czasowego, tj. odchylenia od czasu jaki pokazywałyby zegary synchronicz-
ne, gdyby częstotliwość ta była ściśle równa 50 Hz.
∫∫ ∆=−=∆ ∆
t
nn
t
nn
f dtff
dtfff
t00
1)(1 (3.22)
Kryteria optymalnej regulacji częstotliwości i mocy wymiany między systemami wyma-
gają spełnienia następujących warunków:
1. Odchylenie regulacyjne (3.23) powinno dążyć do wartości minimalnej.
min)()( →−⋅+−=∆ zadwpzppR ffKPPP (3.23)
gdzie:
Pp – moc wymiany; Ppz – zadana wartość mocy wymiany; Kw – energia regulująca wymiany; 2. Nieplanowana w programie wymiana energii między systemami powinna być
kompensowana do zera w określonym czasie.
3. Błąd czasowy (3.22) powinien być jak najmniejszy (najwyżej 2, 3 sekundy na go-
dzinę).
4. Wymiana międzysystemowa powinna odbywać się możliwie bez interwencji nad-
rzędnego regulatora „międzysystemowego”.

24
5. Układy regulacji częstotliwości i mocy współpracujących systemów powinny dzia-
łać równolegle, nie powodując kołysań mocy w liniach współpracy lub zagrożeń
utraty równowagi pracy równoległej.
6. Powinna obowiązywać „zasada nieinterwencji” polegająca na tym, że każdy ze
współpracujących systemów, w miarę możliwości, dąży do pokrywania swoich
zmian mocy obciążenia przez własne źródła wytwórcze [11].
4 Układy regulacji częstotliwości i mocy w systemie elektroener-getycznym.
Właściwa praca elektrowni jest podstawowym elementem, od którego zależą najważniej-
sze parametry jakościowe energii elektrycznej dostarczanej odbiorcom. Zmienność obciążenia
systemu elektroenergetycznego Podb(t) sprawia, że część elektrowni, tj. elektrownie pracujące
w szczycie i podszczycie obciążenia, pracuje ze zmienną mocą i musi nadążać za zmianami
mocy obciążenia systemu Podb(t).
Moc czynną wytwarzaną i częstotliwość w systemie reguluje się przez regulację momentu
napędowego turbin poprzez regulatory prędkości obrotowej turbiny oraz odpowiednio:
- za pomocą regulacji kotłowej bloku pozwalającej na ustalanie parametrów pary
przed zaworami regulacyjnymi turbiny w klasycznych elektrowniach.
- za pomocą regulacji mocy reaktora jądrowego w elektrowniach jądrowych.
W elektrowniach wodnych sposób regulacji momentu zależy od rodzaju turbiny wodnej.
W turbinach Kaplana i Deriaza moment napędowy regulujemy przez zmianę kąta położenia
aparatu kierowniczego i kąta ustawienia łopatek wirnika, w turbinach Francisa wirnik jest
nienastawny, w turbinach Peltona reguluje się przepływ przez dysze i kąt strumienia wody
[17]. Rozdział ten został ograniczony do omówienia układów regulacji klasycznych elek-
trowni parowych.
4.1 Turbiny i ich układy regulacji. Układy regulacji turbin można podzielić na:
- dźwigniowe;
- hydrauliczne;
- elektrohydrauliczne.
Podział ten zależy od konstrukcji mierników prędkości obrotowej. Jako mierniki prędko-
ści obrotowej są używane:
- wahadła odśrodkowe, w układach regulacji dźwigniowych i hydraulicznych;
Regulacja częstotliwości i mocy w systemie elektroenergetycznym 25
- pompki olejowe, których wydajność jest proporcjonalna do prędkości obrotowej,
w układach hydraulicznych;
- prądniczki tachometryczne, których napięcie jest proporcjonalne do prędkości ob-
rotowej, w układach elektrohydraulicznych itp. [16].
Ze wzrostem instalowania zespołów o coraz to większych mocach, wzrastały też wyma-
gania dotyczące układów regulacji turbin. Dotyczyły one głównie zwiększenia czułości, sta-
bilności i niezawodności działania. Tak więc używane początkowo dźwigniowe układy regu-
lacji zostały zastąpione hydraulicznymi układami regulacji. Jednak wymagania regulacji czę-
stotliwości w połączonych systemach elektroenergetycznych narzuciły dalszą ewolucję ukła-
dów regulacji turbin. Powstały układy elektrohydraulicznej regulacji, w których pomiar pręd-
kości oraz formowanie sygnałów regulacyjnych odbywa się w układach mikroprocesoro-
wych, natomiast elementami wykonawczymi pozostały nadal serwomotory hydrauliczne.
Dzięki temu zwiększyła się czułość pomiaru prędkości i wyeliminowano nieliniowość układu
regulacji [16, 20, 22].
4.1.1 Zadania i wymagania stawiane układom regulacji turbin.
Głównymi zadaniami jakie mają spełniać układy regulacji prędkości obrotowej turboze-
społów i hydrozespołów są:
- automatyczne dostosowywanie, w warunkach normalnej pracy bloku, dopływu czynnika
napędowego do aktualnej mocy obciążenia lub do zadanej wartości mocy wytwarzanej;
- opanowanie wzrostu prędkości obrotowej podczas rozbiegu bloku wywołanego nagłym
odciążeniem zespołu, w celu nie dopuszczenia do zadziałania urządzeń zabezpieczają-
cych;
- zapewnić programową regulację prędkości obrotowej podczas rozruchu bloku;
- w czasie synchronizacji bloku z siecią doprowadzić zespół do prędkości synchronicznej,
odpowiadającej częstotliwości sieci z dokładnością umożliwiającą synchronizację;
- zapewnić prawidłowy rozdział mocy wytwarzanej pomiędzy pracujące równolegle ze-
społy w razie zmian obciążenia [11, 16].
Wymagania stawiane regulatorom prędkości obrotowej są zależne od zmian częstotliwo-
ści, które możemy podzielić na trzy grupy:
1. Małe odchylenia z przedziału 0,01 – 0,02 Hz, w wyjątkowych przypadkach do-
chodzące do 0,05 Hz. Są one spowodowane najczęściej niestabilnością układów
regulacji przy czym na rozmiar odchylenia ma wpływ nierównomierność regula-
cji obrotów (statyzm), stała czasowa serwomotoru i przepływ oleju między ele-

26
mentami układu regulacyjnego. Czas trwania powyższych odchyleń jest dość dłu-
gi i wynosi od 10 do 20 s. Odchylenia te są także wywoływane oscylacjami po-
między pracującymi równolegle generatorami, a odbiorami w systemie elektro-
energetycznym. Wielkość odchyleń w tym przypadku zależy od mocy synchroni-
zujących i stałych czasowych rozruchu generatorów, a czas ich trwania jest dość
krótki i wynosi od 0,5 do 2 s.
Odchylenia te są odchyleniami na które regulator prędkości obrotowej nie powi-
nien reagować, ponieważ pogorszyłoby to skuteczność pracy urządzeń regulacyj-
nych i doprowadziło do tak zwanych przeregulowań.
2. Odchylenia średnie przekraczające 0,05 Hz, które można podzielić na dwie pod-
grupy:
- odchylenia nie występujące periodycznie, które są przyczyną zmian mocy
obciążenia systemu np. w okresie od rannym, kiedy to ciągle wzrasta suma-
ryczna moc odbiorów;
- odchylenia występujące periodycznie, spowodowane np. pracą dorywczą
bądź przerywaną dużych maszyn odbiorczych.
Odchylenia te są odchyleniami wymagającymi interwencji regulatorów prędkości
obrotowej.
3. Odchylenia duże wynikające z poważnych awarii układu elektroenergetycznego.
Są to odchylenia wymagające szybkiej reakcji ze strony układów regulacji turbin
[14].
4.1.2 Zasada działania układów regulacji turbin.
Z uwagi na złożoność nowoczesnych układów regulacji turbin, celem wyjaśnienia idei
działania układu regulacji prędkości obrotowej przedstawiono uproszczony układ (rys. 4.1)
hydrauliczny regulacji.
Układ ten jest zasilany olejem z głównego rurociągu olejowego poprzez kryzę dławiącą 7.
Wał turbiny 1 napędza ciężarkowy miernik prędkości 2. W przypadku zwiększenia prędkości
następuje rozciąganie sprężyny i taśmowy element sprężysty 3 odkształca się i przesuwa tło-
czek obrotowy 6 w prawo otwierając okna 5 znajdujące się w tulei 4. W ten sposób zwiększa
się wypływ oleju układu, przez co ciśnienie oleju pod tłokami serwomotorów 9 spada i zawo-
ry regulacyjne turbiny przymykają się. Przy zmniejszaniu się prędkości obrotowej turbiny
tłoczek 6 przesuwa się w lewo zmniejszając wypływ oleju, ciśnienie pod tłokami serwomoto-
rów wzrasta i zawory unoszą się. Kolejność otwierania i wielkość skoku zaworów regulacyj-

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 27
nych zależy od napięcia sprężyn serwomotorów i ciśnienia aktualnie panującego pod tłokami
serwomotorów. Położenie tłoczka 6 względem okien 5 jest wprost proporcjonalne do prędko-
ści obrotowej n. Tak więc ciśnienie oleju pod serwomotorami zaworów 9, strumień pary do-
pływający do turbiny, a więc i moc turbiny są wprost proporcjonalne do prędkości obrotowej
zespołu [16].
Oznaczenia:
19 – główna pompa olejowa;
20 – pomocnicza pompa olejowa;
21 – zbiornik oleju;
22 – zawór sterowany serwomotorem SH przedstawionym na rys. 4.3.
Rys. 4.1. Uproszczony schemat ideowy działania układu regulacji prędkości obrotowej turbiny o sterowaniu hy-draulicznym [16].
Charakterystyka statyczna regulatora wynika właśnie z powyższych zależności (rys. 4.2).
Rys. 4.2. Charakterystyka statyczna regulatora prędkości obrotowej turbiny [16].

28
Załóżmy, że stan równowagi systemu elektroenergetycznego jest określony częstotliwo-
ścią f1 (punkt l na rys. 4.2). W przypadku wzrostu poboru mocy obciążenia w systemie, czę-
stotliwość zmniejsza się do f2` (punkt 2`). Zwiększeniu się mocy obciążenia generatora Pe,
przy stałej mocy turbiny PT odpowiada zmniejszanie się prędkości obrotowej turbiny i regula-
tor prędkości obrotowej zwiększa dopływ pary do turbiny i jej moment napędowy MT (moc
PT) zwiększy się do wartości P2'. Turbina wykazuje tendencję do zwiększania prędkości obro-
towej. Jednak wektor siły elektromotorycznej Ew, którego położenie jest ściśle związane z
wałem generatora, bardziej wyprzedza wektor napięcia U, przez co zwiększa się kąt mocy υ i
moc obciążenia generatora Pel. Powstający przez to tzw. moment synchronizujący Ps, unie-
możliwia dalsze zwiększenie prędkości obrotowej i wystąpi nowy stan równowagi przy czę-
stotliwości f2 (punkt 2), który jest wynikiem zrównoważenia procesów elektromagnetycznych
(mocy Pel) i cieplnomechanicznych (mocy PT). Taki właśnie sposób regulacji, polegający na
zmianie mocy wytwarzanej danego turbozespołu zgodnie z charakterystyką statyczną, doko-
nywany przez regulator prędkości obrotowej, nazywa się regulacją pierwotną.
Układ regulacji prędkości turbiny jest wyposażony w urządzenie do zmiany prędkości ob-
rotowej, zwane często synchronizatorem. Nastawnikiem 10 można zmieniać prędkość obro-
tową na dwa sposoby:
- pokrętłem 11 przy turbinie;
- zdalnie z nastawni elektrowni za pomocą małego silnika elektrycznego 12.
Nastawnikiem wywołujemy trwałą zmianę punktu pracy regulatora — przesunięcie cha-
rakterystyki statycznej regulatora prędkości np. z charakterystyki / na charakterystykę // lub
/// - rys. 4.2, przez przesunięcie położenia tulei 4 względem tłoczka 6 (rys. 4.1); jest to tzw.
regulacja wtórna. Dzięki regulacji wtórnej turbina może rozwijać moc P1 lub P3, przy często-
tliwości f1, czyli można zmieniać moc turbiny przy stałej prędkości obrotowej (częstotliwo-
ści) [16].
Rys. 4.1. przedstawia także regulator bezpieczeństwa 13 posiadający sworzeń 14 na który
działa siła odśrodkowa równoważona siłą sprężyny 15. Przy przekroczeniu granicznej pręd-
kości turbozespołu, siła sprężyny nie jest w stanie zrównoważyć siły odśrodkowej i sworzeń
14 jest wyrzucany ze swojego położenia i uderza w dźwignię 16, która powoduje przesunię-
cie tłoczków 17. Powoduje to odsłonięcie się okna spływu oleju regulacyjnego z zaworu
głównego 8 i serwomotorów zaworów regulacyjnych 9, powodując zamknięcie zaworów.
Turbiny są wyposażone w dwa regulatory bezpieczeństwa, nastawione na zadziałanie przy
1,1 nN i l,12 nN (nN — prędkość znamionowa). Ręczny wyłącznik turbiny 18 służy do spraw-
Regulacja częstotliwości i mocy w systemie elektroenergetycznym 29
dzania regulatora bezpieczeństwa i ręcznego natychmiastowego wyłączenia turbiny w przy-
padkach awaryjnych.
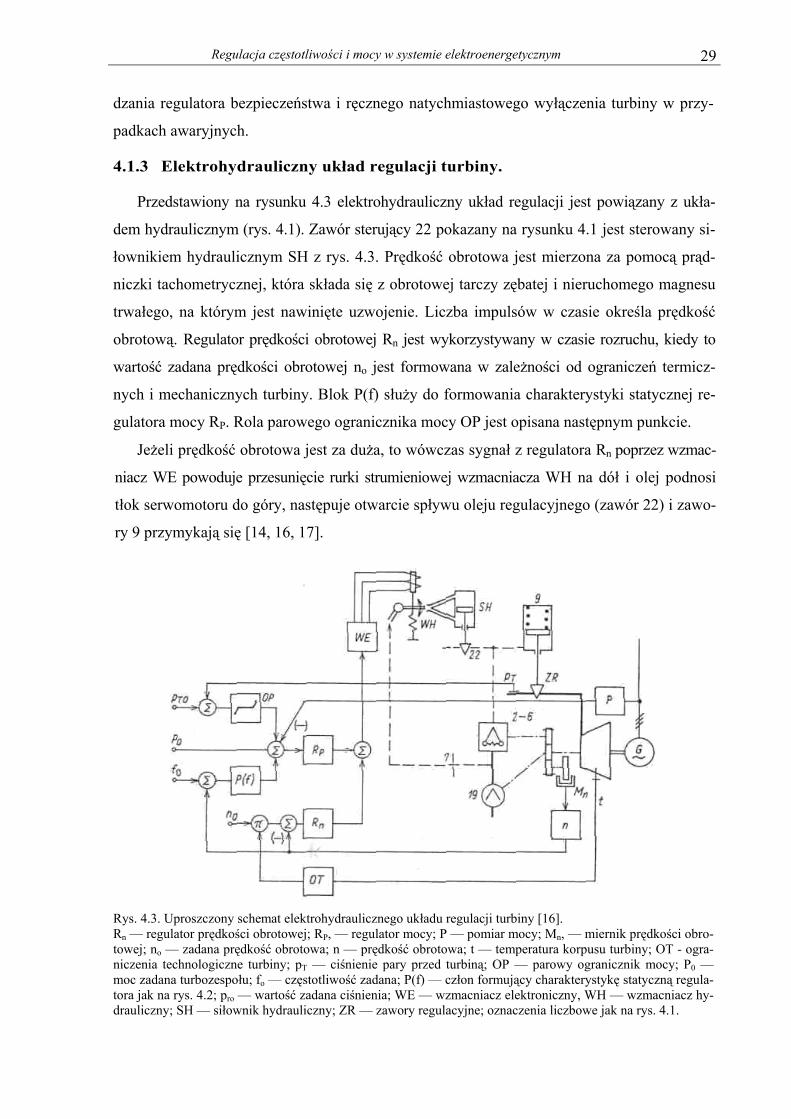
4.1.3 Elektrohydrauliczny układ regulacji turbiny.
Przedstawiony na rysunku 4.3 elektrohydrauliczny układ regulacji jest powiązany z ukła-
dem hydraulicznym (rys. 4.1). Zawór sterujący 22 pokazany na rysunku 4.1 jest sterowany si-
łownikiem hydraulicznym SH z rys. 4.3. Prędkość obrotowa jest mierzona za pomocą prąd-
niczki tachometrycznej, która składa się z obrotowej tarczy zębatej i nieruchomego magnesu
trwałego, na którym jest nawinięte uzwojenie. Liczba impulsów w czasie określa prędkość
obrotową. Regulator prędkości obrotowej Rn jest wykorzystywany w czasie rozruchu, kiedy to
wartość zadana prędkości obrotowej no jest formowana w zależności od ograniczeń termicz-
nych i mechanicznych turbiny. Blok P(f) służy do formowania charakterystyki statycznej re-
gulatora mocy RP. Rola parowego ogranicznika mocy OP jest opisana następnym punkcie.
Jeżeli prędkość obrotowa jest za duża, to wówczas sygnał z regulatora Rn poprzez wzmac-
niacz WE powoduje przesunięcie rurki strumieniowej wzmacniacza WH na dół i olej podnosi
tłok serwomotoru do góry, następuje otwarcie spływu oleju regulacyjnego (zawór 22) i zawo-
ry 9 przymykają się [14, 16, 17].
Rys. 4.3. Uproszczony schemat elektrohydraulicznego układu regulacji turbiny [16]. Rn — regulator prędkości obrotowej; RP, — regulator mocy; P — pomiar mocy; Mn, — miernik prędkości obro-towej; no — zadana prędkość obrotowa; n — prędkość obrotowa; t — temperatura korpusu turbiny; OT - ogra-niczenia technologiczne turbiny; pT — ciśnienie pary przed turbiną; OP — parowy ogranicznik mocy; P0 — moc zadana turbozespołu; fo — częstotliwość zadana; P(f) — człon formujący charakterystykę statyczną regula-tora jak na rys. 4.2; pro — wartość zadana ciśnienia; WE — wzmacniacz elektroniczny, WH — wzmacniacz hy-drauliczny; SH — siłownik hydrauliczny; ZR — zawory regulacyjne; oznaczenia liczbowe jak na rys. 4.1.

30
4.1.4 Regulacja turbin kondensacyjnych.
W przypadku turbozespołów z turbiną kondensacyjną działanie układów regulacji prędko-
ści obrotowej z rys. 4.1 i 4.3 sprowadza się do regulacji mocy wytwarzanej według statycznej
charakterystyki regulatora. Układy te wykonują zadania omówione w p. 4.1.1 oraz zapewnią
spełnienie ograniczeń ruchowych i technologicznych narzuconych przez konstrukcję turboze-
społu i dlatego wyposażone są w urządzenia dodatkowe, takie jak:
- ogranicznik mocy, który uniemożliwia obciążanie turbiny ponad nastawioną war-
tość;
- parowy ogranicznik mocy, który przy wzroście ciśnienia pary przed turbiną ponad
pewną wartość otwiera zawory regulacyjne turbiny przez co wzrasta przepływ pary
i jej ciśnienie obniża się; jeżeli ciśnienie pary obniży się poniżej pewnej wartości, to
działanie parowego ogranicznika jest przeciwne; działanie parowego ogranicznika
ma na celu:
- niedopuszczenie do nadmiernego wzrostu ciśnienia w układzie kocioł-
turbina;
- niedopuszczenie do nadmiernego „rozprężenia" kotła;
- próżniowy ogranicznik mocy, który zabezpiecza turbinę przed pogorszeniem
próżni w skraplaczu, co mogłoby doprowadzić do jej uszkodzenia. Przy pogarsza-
niu próżni próżniowy ogranicznik przymyka zawory regulacyjne turbiny —
zmniejsza dopływ pary do turbiny, a zatem i do skraplacza.
W przypadku układu z przegrzewaniem międzystopniowym, warunki regulacji pogarszają
się, ponieważ pojawia się dodatkowa objętość pary w przegrzewaczu międzystopniowym i
rurociągach łączących poszczególne części turbiny. Pracę turbiny w takim przypadku można
zobrazować na przykładzie zmiany obciążenia zespołu (rys. 4.4). Zmiana mocy turbozespołu
∆P nie następuje od razu do pełnej wartości, lecz zwiększa się początkowo o przyrost odpowia-
dający chwilowemu dociążaniu części wysokoprężnej WP turbiny, a następnie stopniowo ze
wzrostem obciążenia części średnioprężnej SP i niskoprężnej NP. W tym czasie moc części
wysokoprężnej powoli się zmniejsza co wynika z właściwości przegrzewacza międzystopnio-
wego opóźniającego proces zmiany mocy. Część wysokoprężna reaguje bez opóźnień na otwar-
cie zaworów regulacyjnych, zaś zmiana warunków pracy części średnio- i niskoprężnej doko-
nuje się dopiero po przepłynięciu pary przez przegrzewacz międzystopniowy. Opóźnienia
przepływu pary przez przegrzewacz powodują dalsze procesy wymiany obciążeń. Skutkiem
tego mogą być nadmierne zmiany prędkości obrotowej, dlatego przed kadłubem średniopręż-

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 31
nym znajdują się zawory regulacyjne, które w stanach przejściowych są przymykane. Po li-
kwidacji zakłócenia zawory te są z powrotem otwierane [16].
Rys. 4.4. Zmiana mocy turbiny z przegrzewem międzystopniowym przy skokowym zwiększeniu otwarcia zawo-
rów regulacyjnych części wysokoprężnej w chwili τo [16]. ∆P, ∆PWP, ∆PSNP – zmiany mocy: całkowitej, części wysoko-, średnio- i niskoprężnej.
Rysunek 4.5 przedstawia schemat regulacji turbiny w układzie z międzystopniowym prze-
grzewaniem pary. Element 4 jest elementem ograniczającym oddziaływanie regulatora pręd-
kości 2 na zawory regulacyjne 5 części średnioprężnej przy małych zakłóceniach [16].
5
4
3
2
1
Rys. 4.5. Ideowy schemat regulacji turbiny z przegrzewem międzystopniowym [16]. 1 — zawory regulacyjne części wysokoprężnej turbiny; 2 — regulator prędkości; 3 — człon różniczkujący (przy-spieszający); 4 — sztuczne ograniczenie działania zaworów regulacyjnych; 5 — zawory regulacyjne części średnio-prężnej.
4.1.5 Regulacja turbin upustowych.
W przypadku turbin upustowych reguluje się jednocześnie prędkość obrotową i ciśnienie
pary w upustach turbiny. Stosuje się tu na ogół regulację związaną (rys. 4.6). Jest to regulacja
w której sygnały wyjściowe regulatora prędkości obrotowej i regulatora ciśnienia są sprzę-
gnięte ze sobą w ten sposób, że w razie np. zmniejszenia obciążenia turbozespołu regulator

32
prędkości oddziałuje w jednakowym kierunku na oba zawory regulacyjne, zmniejszające do-
pływ pary do obu części turbiny, nie zmieniając przy tym strumienia pary pobieranej z upu-
stów. Jak już wiemy ze wzrostem częstotliwości w systemie elektroenergetycznym, zmniejsza
się obciążenie turbozespołu. Gdy jego prędkość obrotowa zaczyna wzrastać, tuleja 9 miernika
prędkości 8 przesuwa się w górę, a razem z nią do góry przesuwają się także tłoczki wzmac-
niacza 7, które otwierają okno dla oleju, który wpływa nad tłok serwomotoru 4 powodując
przymknięcie zaworów 5 i 6. Przy zmianie strumienia pary pobieranej z upustu, np. jej
zmniejszeniu, regulator oddziałuje na każdy z zaworów regulacyjnych w przeciwnym kierun-
ku, tzn. do części wysokoprężnej zmniejsza, a do części niskoprężnej (za upustem) zwiększa do-
pływ pary. Moc turbiny pozostaje wówczas bez zmian. Ze wzrostem ciśnienia w upuście (rys.
4.6) mieszek 1 przesunie rurkę strumieniową 2 regulatora ciśnienia w lewo i olej przechodzi
pod tłok serwomotoru 3 powodując otwieranie zaworu 6 i przymykanie zaworu 5.
Wadą przedstawionego sposobu regulacji ciśnienia w upuście jest to, że pozostały stru-
mień pary za upustem jest dławiony zaworem regulacyjnym powodując obniżenie sprawności
turbiny.
Rys. 4.6. Układ regulacji turbiny upustowo-kondensacyjnej [16].
4.1.6 Regulacja turbin przeciwprężnych.
Turbiny przeciwprężne mogą pracować według następujących harmonogramów obciążeń:
- harmonogramu cieplnego;
- harmonogramu elektrycznego.
Podczas pracy według elektrycznego harmonogramu obciążeń regulator prędkości obro-
towej oddziałuje na dopływ pary do turbiny, a żądaną wartość ciśnienia pary za turbiną
utrzymują inne urządzenia, np. stacje redukcyjno-schładzające.
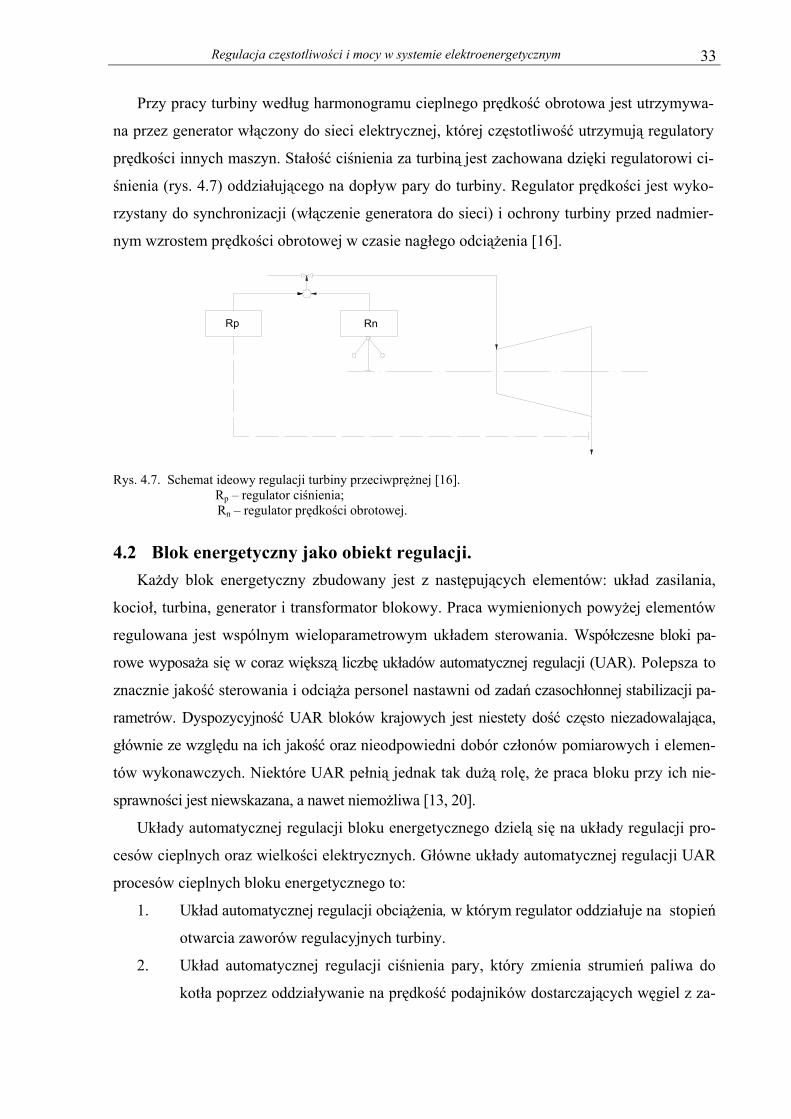
Regulacja częstotliwości i mocy w systemie elektroenergetycznym 33
Przy pracy turbiny według harmonogramu cieplnego prędkość obrotowa jest utrzymywa-
na przez generator włączony do sieci elektrycznej, której częstotliwość utrzymują regulatory
prędkości innych maszyn. Stałość ciśnienia za turbiną jest zachowana dzięki regulatorowi ci-
śnienia (rys. 4.7) oddziałującego na dopływ pary do turbiny. Regulator prędkości jest wyko-
rzystany do synchronizacji (włączenie generatora do sieci) i ochrony turbiny przed nadmier-
nym wzrostem prędkości obrotowej w czasie nagłego odciążenia [16].
Rp Rn
Rys. 4.7. Schemat ideowy regulacji turbiny przeciwprężnej [16]. Rp – regulator ciśnienia;
Rn – regulator prędkości obrotowej.
4.2 Blok energetyczny jako obiekt regulacji. Każdy blok energetyczny zbudowany jest z następujących elementów: układ zasilania,
kocioł, turbina, generator i transformator blokowy. Praca wymienionych powyżej elementów
regulowana jest wspólnym wieloparametrowym układem sterowania. Współczesne bloki pa-
rowe wyposaża się w coraz większą liczbę układów automatycznej regulacji (UAR). Polepsza to
znacznie jakość sterowania i odciąża personel nastawni od zadań czasochłonnej stabilizacji pa-
rametrów. Dyspozycyjność UAR bloków krajowych jest niestety dość często niezadowalająca,
głównie ze względu na ich jakość oraz nieodpowiedni dobór członów pomiarowych i elemen-
tów wykonawczych. Niektóre UAR pełnią jednak tak dużą rolę, że praca bloku przy ich nie-
sprawności jest niewskazana, a nawet niemożliwa [13, 20].
Układy automatycznej regulacji bloku energetycznego dzielą się na układy regulacji pro-
cesów cieplnych oraz wielkości elektrycznych. Główne układy automatycznej regulacji UAR
procesów cieplnych bloku energetycznego to:
1. Układ automatycznej regulacji obciążenia, w którym regulator oddziałuje na stopień
otwarcia zaworów regulacyjnych turbiny.
2. Układ automatycznej regulacji ciśnienia pary, który zmienia strumień paliwa do
kotła poprzez oddziaływanie na prędkość podajników dostarczających węgiel z za-

34
sobników przykotłowych do młynów. Do układu tego należy też regulator paliwa i
współpracujące z nim układy wentylacji młynów oraz temperatury mieszanki py-
łowo powietrznej.
3. Układ automatycznej regulacji temperatury pary pierwotnej i wtórnej, który ma za
zadanie utrzymywanie stałej wartości temperatury pary lub wartości zmienianej
programowo.
4. Układ automatycznej regulacji zasilania kotła wodą, który ma za zadanie tak zmie-
niać dopływ strumienia wody, aby zachować stan równowagi ze strumieniem pary
pobieranej z kotła.
5. Układ automatycznej regulacji procesu spalania, którego zadaniem jest utrzymanie
optymalnej wartości nadmiaru powietrza w komorze paleniskowej, czyli zapew-
nienie ekonomicznego spalania.
6. Układ automatycznej regulacji podciśnienia w komorze paleniskowej, utrzymujący
stałe podciśnienie w komorze paleniskowej przez zmianę wydajności wentylatorów
spalin .
Są to najważniejsze, współdziałające ze sobą, układy regulacji poza którymi istnieje jesz-
cze wiele innych [16].
Rysunek 4.9 przedstawia typowy układ regulacyjny bloku energetycznego najczęściej sto-
sowany w naszym kraju, na którym widać, że kocioł i jego zasilanie węglem, wodą i powie-
trzem (rys. 4.8) jest głównym elementem składowym bloku. Sygnał do rozpoczęcia procesu
regulacji pochodzi od regulatora obciążenia Rn, w którym porównuje się aktualne obciążenie
elektryczne bloku P z jego wartością planowaną Pp. Sygnał ten działa pośrednio, poprzez re-
gulator obrotów R0, na główny zawór dolotowy pary Zt do turbiny.
Regulator R0 podnosi lub obniża położenie grzybka nad gniazdem zaworu Z1, a przez to
zmienia wielkość dopływu pary D z kotła do turbiny. Zmiana wielkości przepływu pary D
powoduje za pomocą regulatora R5 zmianę podmuchu powietrza L2 dopływającego do pod-
grzewaczy powietrza w kotle. Ponadto zmiana strumienia D powoduje chwilową zmianę ci-
śnienia pary p1 oraz zmianę jej temperatury τ1. Wielkości te maleją przy wzroście obciążenia
turbiny, a rosną w przeciwnym przypadku.

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 35
Rys. 4.8. Typowy schemat zasilania kotła z zaznaczeniem wprowadzeń węgla B, powietrza L, oraz
wody [14]. P1, P2 — przegrzewacze, Sch — schładzacz pary.
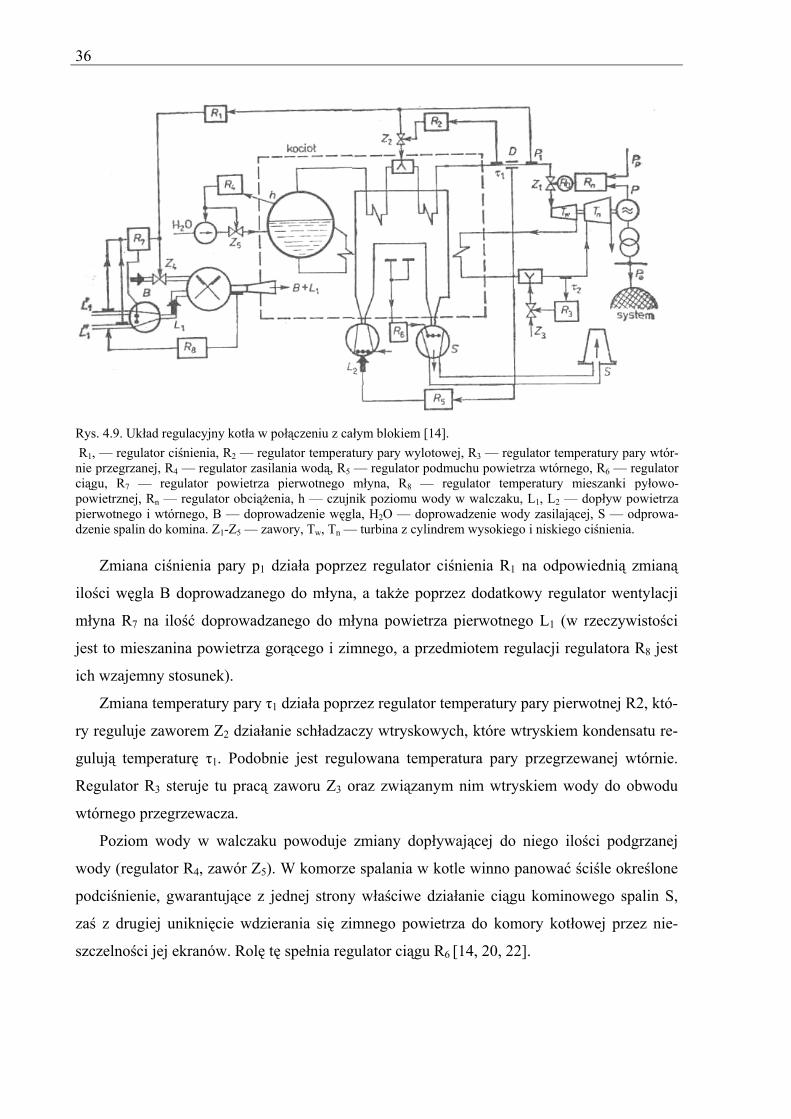
36
Rys. 4.9. Układ regulacyjny kotła w połączeniu z całym blokiem [14]. R1, — regulator ciśnienia, R2 — regulator temperatury pary wylotowej, R3 — regulator temperatury pary wtór-nie przegrzanej, R4 — regulator zasilania wodą, R5 — regulator podmuchu powietrza wtórnego, R6 — regulator ciągu, R7 — regulator powietrza pierwotnego młyna, R8 — regulator temperatury mieszanki pyłowo-powietrznej, Rn — regulator obciążenia, h — czujnik poziomu wody w walczaku, L1, L2 — dopływ powietrza pierwotnego i wtórnego, B — doprowadzenie węgla, H2O — doprowadzenie wody zasilającej, S — odprowa-dzenie spalin do komina. Z1-Z5 — zawory, Tw, Tn — turbina z cylindrem wysokiego i niskiego ciśnienia.
Zmiana ciśnienia pary p1 działa poprzez regulator ciśnienia R1 na odpowiednią zmianą
ilości węgla B doprowadzanego do młyna, a także poprzez dodatkowy regulator wentylacji
młyna R7 na ilość doprowadzanego do młyna powietrza pierwotnego L1 (w rzeczywistości
jest to mieszanina powietrza gorącego i zimnego, a przedmiotem regulacji regulatora R8 jest
ich wzajemny stosunek).
Zmiana temperatury pary τ1 działa poprzez regulator temperatury pary pierwotnej R2, któ-
ry reguluje zaworem Z2 działanie schładzaczy wtryskowych, które wtryskiem kondensatu re-
gulują temperaturę τ1. Podobnie jest regulowana temperatura pary przegrzewanej wtórnie.
Regulator R3 steruje tu pracą zaworu Z3 oraz związanym nim wtryskiem wody do obwodu
wtórnego przegrzewacza.
Poziom wody w walczaku powoduje zmiany dopływającej do niego ilości podgrzanej
wody (regulator R4, zawór Z5). W komorze spalania w kotle winno panować ściśle określone
podciśnienie, gwarantujące z jednej strony właściwe działanie ciągu kominowego spalin S,
zaś z drugiej uniknięcie wdzierania się zimnego powietrza do komory kotłowej przez nie-
szczelności jej ekranów. Rolę tę spełnia regulator ciągu R6 [14, 20, 22].
Regulacja częstotliwości i mocy w systemie elektroenergetycznym 37
5 Automatyczna regulacja częstotliwości i mocy (ARCM) w Kra-jowym Systemie Elektroenergetycznym (KSE).
Prace związane z unowocześnieniem sterowania Krajowego Systemu Elektroenergetycz-
nego trwają już wiele lat. Pierwsze prototypowe urządzenia związane z regulacją mocy i czę-
stotliwości (ARCM) powstały już pod koniec lat pięćdziesiątych. Pierwszy kompleksowy
układ regulacji częstotliwości i mocy systemu elektroenergetycznego został uruchomiony w
1966 r. Po próbach międzynarodowych został włączony do ciągłej eksploatacji. Umożliwiło
to utworzenie jednego wielkiego systemu elektroenergetycznego w skład którego weszły po-
łączone ze sobą systemy: Polski, Czechosłowacji, Węgier i wschodniej części Niemiec
(NRD). Regulator centralny wysyłał sygnały sterujące do regulatorów wykonawczych turbin
o mocy od 8 MW do 100 MW w 17 elektrowniach. W roku 1975 wdrożono w KSE nowy re-
gulator centralny ARCM, który formował jeden sygnał do szybkiego bilansowania mocy
KSE i drugi dla potrzeb Ekonomicznego Rozdziału Obciążeń (ERO) i odbudowy zapasu
mocy regulacyjnej dla szybkiej regulacji mocy. Ten dwustopniowy układ regulacji mocy
ARCM-2 zainstalowano w KDM (regulator centralny) oraz elektrowniach cieplnych i
wodnych. W 1990 roku wdrożono regulator centralny układu ARCM wykorzystujący kompu-
ter klasy PC pracujący pod systemem operacyjnym DOS. Układem ARCM-2 objęto wszyst-
kie bloki energetyczne w elektrowniach systemowych. W 1995 powstało w KDM Centrum
Regulacyjno-Rozliczeniowe (CRR), które od 1 października 1996 roku przejęło funkcję ste-
rowania i kontroli wymiany energii elektrycznej pomiędzy systemami CENTREL (połączone
systemy energetyczne Polski, Czech, Słowacji i Węgier) i UCTE (systemem Europy Zachod-
niej), które zostały połączone do pracy równoległej 18 października 1995 r.
Przejęcie regulacji w systemie CENTREL przez Polski System Elektroenergetyczny wy-
magało stworzenia w relatywnie krótkim czasie odpowiedniej infrastruktury i narzędzi. W
początkowym etapie prace zespołów specjalistycznych prowadziły intensywne projekty ba-
dawcze koncentrując się na następujących podstawowych zagadnieniach:
- analiza proponowanych zasad regulacji, wymagań i zaleceń UCTE oraz możliwości
ich spełnienia,
- analiza wartości nastaw regulatora,
- analiza wyposażenia technicznego istniejących układów teletransmisji danych dla pro-
cesu regulacji w krajach CENTRELA oraz sąsiednich krajów UCTE,
- analiza układu akwizycji danych do regulacji i rozliczeń: specyfikacji protokołów ko-
munikacyjnych, próby standaryzacji rozwiązań u partnerów, dobór i struktura wypo-
sażenia technicznego układów akwizycji danych,

38
- opracowanie rozproszonej struktury całego systemu informatycznego powstającego
Centrum Regulacyjno Rozliczeniowego (CRR) w Warszawie, wybór środków tech-
nicznych i narzędzi programistycznych,
- realizacja oprogramowania projektu (techniki obiektowe, standardy software’owe).
Ostatecznie do regulacji został przyjęty pluralistyczny model regulacji. Oznacza to, że
każdy z krajów partnerskich CENTREL’a odpowiada za regulację mocy czynnej i częstotli-
wości swojego systemu elektroenergetycznego, przy zasadzie nieinterwencji. Polska dodat-
kowo przejęła zobowiązania regulacji grupowej, tj. na przekroju CENTREL-UCTE. Jednym z
niezbędnych warunków tej regulacji jest zapewnienie transmisji danych dotyczących warun-
ków i mocy wymiany w cyklu 1s ze stacji granicznych CENTREL - UCPE do KDM-CRR w
Warszawie. Cykl 1s uzasadniony jest koniecznością zapewnienia odpowiedniej jakości regu-
lacji i daje możliwość pełnej bieżącej kontroli przepływów na liniach granicznych.
Dla spełnienia zadań statutowych CRR musi być wyposażone w odpowiedni zasób infor-
macji zarówno pod względem merytorycznym , jak i czasowym. Dla zapewnienia żądanych
parametrów regulacji konieczne jest zastosowanie akwizycji danych (P, Q, U, f) w cyklu jed-
nosekundowym. Zapewnienie takiego cyklu akwizycji możliwe jest tylko
przez niezależny system akwizycji pracujący na łączach bezpośrednich z 18 linii.
Regulacja częstotliwości i mocy wymiany tzw. regulacja wtórna , jest nadrzędną regulacją
w systemie elektroenergetycznym. Celem takiej regulacji, wykonywanej przez regulatory cen-
tralne każdego z współpracujących systemów, jest utrzymywać zadany poziom mocy wymia-
ny na liniach wymiany międzynarodowej i zadaną wartość częstotliwości (zmienioną przez
układy regulacji pierwotnej w systemie) [3, 4, 5].
5.1 Zasady regulacji. Do regulacji częstotliwości i mocy wymiany w grupie krajów CENTREL przyjęto tzw.
model regulacji pluralistycznej. W modelu tym założono, że każdy z krajów ma obowiązek
regulacji swojego błędu obszaru, natomiast system Polski zregulowuje błąd obszarowy sys-
temu CENTREL.
Zgodnie z wytycznymi proces regulacji powinien spełniać następujące kryteria:
- odchyłka mocy nie powinna przekraczać 100 MW od wartości zadanej dłużej niż 3 s;
- wartość niezbilansowanej energii nie powinna przekraczać poziomu 20MWh/h.
W procesie regulacji częstotliwości i mocy wymiany, w oparciu o dane on-line zbierane z
linii granicznych, wyliczany jest błąd obszarowy (ACE) wg wzoru:

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 39
fp PPE ∆+∆= (5.1.)
gdzie:
E - uchyb regulacji obszaru CENTREL’a; ∆Pp - odchylenie aktualnego bilansu mocy wymiany od wartości planowanej; ∆Pf - korekcja częstotliwości. W równaniu (5.1), poszczególne człony spełniają następujące warunki:
popp PPP −=∆ (5.2.)
)( oSSp ffKfKP −⋅=∆⋅=∆ (5.3.)
KS - stała systemowa energii regulującej (mocowy równoważnik częstotliwości).
Obszarowy uchyb regulacji systemu CENTREL jest otrzymywany ze wzoru:
)( oSpSp ffKPfKPE −⋅+∆=∆⋅+∆= (5.4.)
gdzie:
Pp - aktualny bilans mocy wymiany dla systemu CENTREL; Ppo - planowany poziom bilansu mocy wymiany dla systemu CENTREL; ∆f -odchylenie częstotliwości od wartości zadanej; f - częstotliwość w systemie; fo - zadana częstotliwość w systemie.
Dla doboru wartości parametru KS, i sprawdzenia własności regulacyjnych poszczegól-
nych systemów przeprowadzono odpowiednie próby systemowe (wrzesień 1993, wrzesień
1995), przed przystąpieniem do pracy synchronicznej bloków CENTREL i UCTE. Próby te
były zorganizowane wspólnie przez Instytut Automatyki Systemów Energetycznych we Wro-
cławiu i Polskie Sieci Elektroenergetyczne. Zaakceptowane przez zainteresowanych partne-
rów wartości parametrów KS przedstawiono w tabeli 1.
Kraj System el-en
Moc zainsta-lowana (MW)
Moc szczytowa
(MW)
KS (MW/Hz)
1 Polska PSE SA 33,171 22,050 2000 2 Czechy CEZ a.s. 13,826 9,632 1000 3 Słowacja SE a.s. 6,935 3,778 400 4 Węgry MVMRt 7,317 5,700 600
Tabela 1. Dane systemów krajów partnerskich oraz zaakceptowane wartości parametru Ks.
Właściwe wyznaczenie uchybu regulacji (błędu obszarowego) jest głównym problemem
w procesie regulacji. Uchyb ten stanowi podstawę do wyznaczenia przez regulator centralny
sygnałów regulacyjnych do elektrowni. Proces regulacji doprowadza do redukcji wartości
błędu obszaru do wartości w pobliżu zera.

40
5.2 Struktura i zasada działania układu automatycznej regulacji częstotli-wości i mocy.
Najważniejszymi elementami pracującego obecnie w KSE układu ARCM-2 są (rys. 5.1.):
- mikroprocesorowy regulator centralny liczący uchyb regulacji E i formujący sygnały
regulacyjne Y;
- system transmisji sygnałów regulacyjnych i telepoleceń UTRT, którego zadaniem jest
transmisja sygnałów i telepoleceń przez stacje retransmisyjne w ODM do bloków w
elektrowniach;
- urządzenia sterujące ARCM przy blokach w elektrowniach, których zadaniem jest
formowanie analogowych sygnałów mocy zadanych dla regulatorów mocy na podsta-
wie cyfrowych sygnałów regulacyjnych Y;
- układy regulacji mocy na blokach w elektrowniach.
Obecnie do elektrowni przesyłane są sygnały regulacyjne Y1S, Y1, Y0, które można zdefi-
niować następująco:
Y1S – sygnał szybkiej regulacji obciążenia hydrozespołów w elektrowniach wodnych
szczytowo- pompowych;
Y1 – sygnał szybkiej regulacji obciążenia bloków w elektrowniach cieplnych w zakre-
sie od ±(3 ÷ 6) procent mocy znamionowej bloków wokół mocy bazowej, usta-
wianej automatycznie sygnałem Y0 lub za pomocą ręcznej regulacji RRC;
Y0 – wolnozmienny sygnał przeznaczony do regulacji mocy bazowej na blokach
cieplnych, odpowiadający przyrostowi względnemu kosztów w systemie; jest to
sygnał odpowiadający za realizacje ERO w systemie na tyle na ile jest to możli-
we pod względem technicznym; obecnie w KSE sygnał ten jest wyłączony, a
ERO nie jest stosowany;
Działające w elektrowniach bloki funkcyjne zamieniają sygnały regulacyjne na składowe
mocy zadanej Pz, przy czym sygnały Y1S i Y1 są zamieniane w sposób liniowy, a sygnał Y0 w
sposób nieliniowy w celu realizacji zasady ekonomicznego rozdziału obciążeń (ERO) [ 9 ].

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 41
Tele
mec
hani
ka
Y1S,
Y1,Y
0
FY1S
Mik
ropr
oces
orow
y re
gula
tor c
entr
alny
Ks
∆
∆
FE
Σf
P
f o P
λ
DRT
NY0
Y1FY
1Y1
S
MRC
FY0
blok
ówdo
poz
ostały
ch RM
US
DRT
O(Y
1S)
Y1 Y0TZ
Po
-
wol
nozm
ienn
a skła
dow
a Pz
; zal
eżna
od
Y0 lu
b za
daw
ana
ręcz
nie.
Pz
-
sygn
ał m
ocy
zada
nej T
Z.
DRT
O -
urząd
zeni
e od
bior
cze
tele
mec
hani
ki U
TRT.
DRT
N -
urząd
zeni
e na
daw
cze
tele
mec
hani
ki U
TRT.
RM
-
regu
lato
r moc
y TZ
.
US
- ur
ządz
enie
ster
ujac
e ty
pu R
Cm
-1/2
-0 (R
Cm
-1/3
55 lu
b in
ne).
FY0
-
blo
k fo
rmat
ując
y sy
gnał
Y0;
regu
lato
r o c
hara
kter
ysty
ce I.
FY1S
-
blok
form
atując
y sy
gnał
Y1S
; reg
ulat
or o
cha
rakt
erys
tyce
I.
FY1
-
blo
k fo
rmat
ując
y sy
gnał
Y1;
regu
lato
r o c
hara
kter
ysty
ce I.
FE
-
blo
k fo
rmat
ując
y uc
hyb
regu
lacj
i E.
TZ
-
turb
ozes
pół.
-
ene
rgia
regu
lują
ca w
torn
a.
fo
-
zada
na c
zest
otliw
ość
syst
emu.
f
-
czę
stot
liwość
syst
emu.
P
-
szyb
kozm
ienn
a skła
dow
a Pz
; zal
eżna
od
Y1.
1
Σ Ks
elek
trow
nido
poz
ostały
ch
Ppo
- p
lano
wan
a su
ma
moc
y w
ymia
ny.
Pp
- s
uma
moc
y w
ymia
ny.
p
po
E= P
+
f
p
Rys
. 5.1
. Stru
ktur
a ukła
du A
RC
M-2
[3].
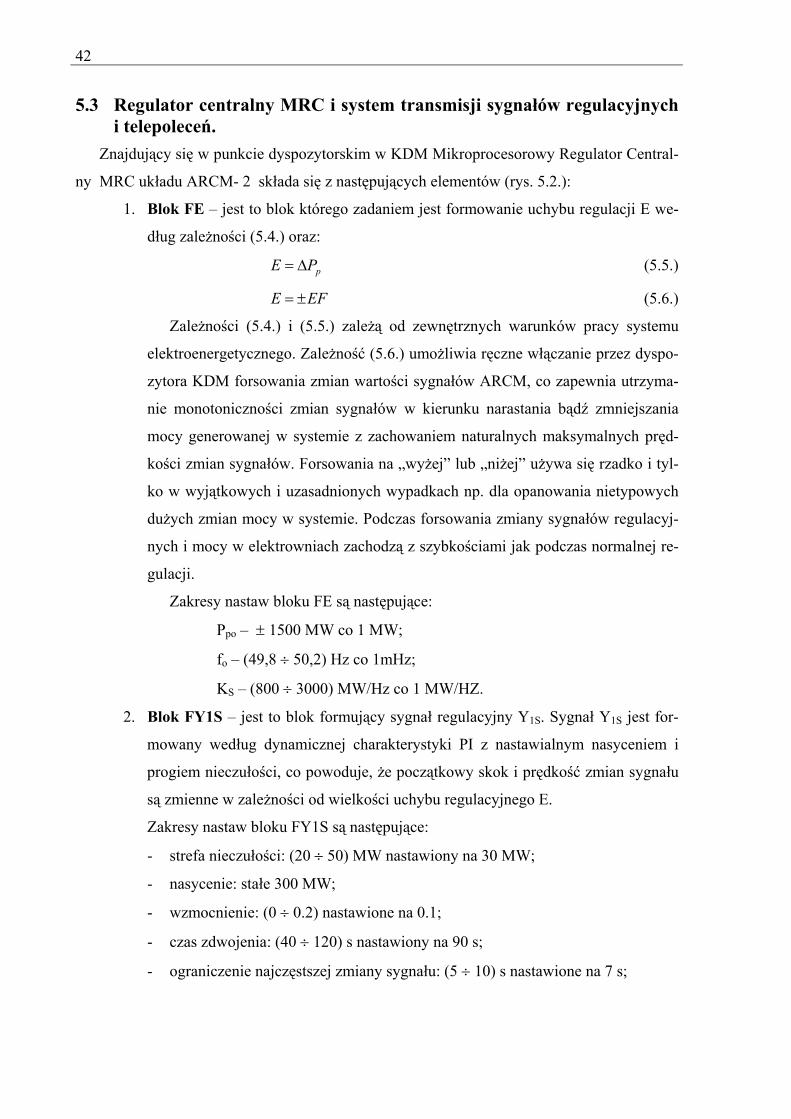
42
5.3 Regulator centralny MRC i system transmisji sygnałów regulacyjnych i telepoleceń.
Znajdujący się w punkcie dyspozytorskim w KDM Mikroprocesorowy Regulator Central-
ny MRC układu ARCM- 2 składa się z następujących elementów (rys. 5.2.):
1. Blok FE – jest to blok którego zadaniem jest formowanie uchybu regulacji E we-
dług zależności (5.4.) oraz:
pPE ∆= (5.5.)
EFE ±= (5.6.)
Zależności (5.4.) i (5.5.) zależą od zewnętrznych warunków pracy systemu
elektroenergetycznego. Zależność (5.6.) umożliwia ręczne włączanie przez dyspo-
zytora KDM forsowania zmian wartości sygnałów ARCM, co zapewnia utrzyma-
nie monotoniczności zmian sygnałów w kierunku narastania bądź zmniejszania
mocy generowanej w systemie z zachowaniem naturalnych maksymalnych pręd-
kości zmian sygnałów. Forsowania na „wyżej” lub „niżej” używa się rzadko i tyl-
ko w wyjątkowych i uzasadnionych wypadkach np. dla opanowania nietypowych
dużych zmian mocy w systemie. Podczas forsowania zmiany sygnałów regulacyj-
nych i mocy w elektrowniach zachodzą z szybkościami jak podczas normalnej re-
gulacji.
Zakresy nastaw bloku FE są następujące:
Ppo – ± 1500 MW co 1 MW;
fo – (49,8 ÷ 50,2) Hz co 1mHz;
KS – (800 ÷ 3000) MW/Hz co 1 MW/HZ.
2. Blok FY1S – jest to blok formujący sygnał regulacyjny Y1S. Sygnał Y1S jest for-
mowany według dynamicznej charakterystyki PI z nastawialnym nasyceniem i
progiem nieczułości, co powoduje, że początkowy skok i prędkość zmian sygnału
są zmienne w zależności od wielkości uchybu regulacyjnego E.
Zakresy nastaw bloku FY1S są następujące:
- strefa nieczułości: (20 ÷ 50) MW nastawiony na 30 MW;
- nasycenie: stałe 300 MW;
- wzmocnienie: (0 ÷ 0.2) nastawione na 0.1;
- czas zdwojenia: (40 ÷ 120) s nastawiony na 90 s;
- ograniczenie najczęstszej zmiany sygnału: (5 ÷ 10) s nastawione na 7 s;

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 43
- mocowy równoważnik RS sygnału Y1S: (0 ÷ 5) MW/stopień nastawiony na 2
MW/stopień;
- zakres zmian sygnału Y1S: (-31 ÷ +31);
3. Blok FY1 – blok formujący sygnał regulacyjny Y1 według charakterystyki dyna-
micznej I z nastawialnym nasyceniem i progiem nieczułości. Szybkość zmian sy-
gnału regulacyjnego Y1 zależna jest od uchybu regulacji E i od aktualnej wartości
sygnału Y1S.
Zakresy nastaw bloku FY1 są następujące:
- strefa nieczułości: (20 ÷ 50) MW nastawiony na 30 MW;
- nasycenie: stałe 300 MW;
- czas całkowania: (100 ÷ 200) s nastawiony na 150 s;
- ograniczenie najczęstszej zmiany sygnału: (10 ÷ 15) s nastawione na 12 s;
- mocowy równoważnik R1 sygnału Y1: (0 ÷ 5) MW/stopień nastawiony na 2
MW/stopień;
- zakres zmian sygnału Y1S: (-31 ÷ +31);
4. Blok FY0 – blok formujący sygnał regulacyjny Y0 według charakterystyki dyna-
micznej I z nastawialnym nasyceniem i progiem nieczułości. Szybkość zmian sy-
gnału regulacyjnego Y1 zależna jest od uchybu regulacji E i od aktualnej wartości
sygnałów Y1S i Y1.
Zakresy nastaw bloku FY0 są następujące:
- strefa nieczułości: (20 ÷ 50) MW nastawiony na 30 MW;
- nasycenie: stałe 200 MW;
- czas całkowania: (30 ÷ 60) min nastawiony na 30 min;
- ograniczenie najczęstszej zmiany sygnału: stałe 1min;
- zakres zmian sygnału Y0: (0 ÷ 31);

44
R1+
FE - blok formujący uchyb regulacji EE1S, E1, E0 - uchyby na wejściach regulatorów odpowiednio dla sygnałów Y , Y , Y R1, RS - mocowe równoważniki sygnałów Y , Y
Y , Y , Y - sygnały regulacyjne wyjściowe
sK - energia regulująca systemu
FY0 - blok formujący sygnał YFY1S - blok formujący sygnał YFY1 - blok formujący sygnał Y
1S
0
1
E - uchyb regulacji P - planowane saldo mocy wymianyP - saldo mocy wymianyf - częstotliwość zadanaf - częstotliwość systemu
o
1S 1 0
1S
1 1S
1 0
przy E= EF ... forsowanie w dół
przy E=-EF ... forsowanie w górę
Ręczne włączanie forsowania
-EFEF
FE
P
P-
+ P
f-
of
+ f
E/FE
E
+ +
+
+FY0 +
+
FY1S
+ RS
sKFY1
- człon z nastawialnym progiem nieczułości i nasyceniem
(interwencyjna ręczna zmiana Y )
PI
- sumator
- regulator PI
IE0
0I Y
Y0
0
(interwencyjna ręczna zmiana Y )
PIE1S Y1S
IE1
1YI
Y1
Do elektrowni
1
p
po
p
p
po
Rys. 5.2. Schemat blokowy regulatora centralnego.
Regulator centralny MRC wykorzystuje komputer IBM i pracuje w otoczeniu sprzętowym
pokazanym na rys. 5.3. Regulator ten z zewnętrznych układów pomiarowych MPp i Mf
otrzymuje sygnały sumy mocy wymiany Pp i częstotliwości systemu f. Sygnały regulacyjne Y
wygenerowane przez regulator centralny są przekazywane w kodzie równoległym przez
wzmacniacz do nadajnika telemechaniki UTRT typu DRTN. Nadajnik ten formuje telegram
transmisyjny, który powiela i wysyła do ODM-ów i elektrowni. Układ ten transmituje także
inne sygnały związane z dyspozytorską pracą KSE. Wysyłane do elektrowni sygnały regula-
cyjne są z powrotem odbierane w KDM przez miejscowy odbiornik telemechaniki i jako
sprzężenie zwrotne przekazywane do regulatora centralnego. Wszystkie wysyłane sygnały re-
gulacyjne są rejestrowane w KDM w celu ich obserwacji. Dyspozytorzy KDM komunikują
się z regulatorem centralnym MRC poprzez klawiaturę alfanumeryczną i dwa połączone rów-
nolegle monitory. Dla rezerwowania w KDM znajduje się jeszcze drugi zestaw komputerowy
IBM, przy czym przełączenie układu z podstawowego na rezerwowy jest dokonywane ręcz-
nie. Poza tym jest jeszcze gotowy do uruchomienia w każdej chwili do pracy regulator cen-
tralny starej generacji.

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 45
anal
ogow
e kod
rów
nole
gły
Y1S,
Y1,
Y0
220 V~ z siecisy
gnał
y
MRC
MO
NIT
OR
ZASILACZ(bezprzerwowy)
220
V~
Ozn
acze
nia:
MIK
RO -
KO
MPU
TER
P f
- wzm
acni
acz w
ielo
kanało
wy
KLA
WIA
TURA
REA
Y1S,
Y1,
Y0
kod
rów
nole
gły
c/asp
rzęż
enie
zwro
tne
Y1S,
Y1,
Y0
UP
REA Y1
- mie
rnik
sum
y m
ocy
wym
iany
+5
V
MP Mf
Y1
+12
V MP
OT
NT
REA
Y1S
Y0
w k
odzi
e sz
ereg
owym
Y1S,
Y1,
Y0
NT
REA
c/a
OT
- rej
estr
ator
ana
logo
wy
- prz
etw
orni
k c/
a
- nad
ajni
k te
lem
echa
niki
- odb
iorn
ik te
lem
echa
niki
- mik
ropr
oces
orow
y re
gula
tor c
entr
alny
- mie
rnik
czę
stot
liwoś
ci
- ukł
ad p
ośre
dnic
zący
UP
Mf
MRC
p
p
p
Rys
. 5.3
. Sc
hem
at p
ołąc
zeni
a M
RC
z o
tocz
enie
m sp
rzęt
owym
[3].

46
W systemie elektroenergetycznym zdarzają się pewne naturalne i przypadkowe wahania
częstotliwości i mocy, które zależą nie tylko od struktury wytwarzania ale także od uwarun-
kowań sieciowych. Zregulowywanie tych wahań mija się z celem, ponieważ byłoby to zbyt
kosztowne przy znikomym efekcie. Aby uniknąć przeciwdziałania tym wahaniom przez układ
regulacji można stosować w nim filtry oraz strefy nieczułości w blokach formowania sygna-
łów regulacyjnych. Skuteczność stosowania stref nieczułości została potwierdzona w prakty-
ce.
Liczba sygnałów regulatora centralnego , ich zakresy i szybkości zmian wynikają z po-
trzeb systemu oraz z możliwości regulacyjnych źródeł mocy podporządkowanych poszcze-
gólnym sygnałom regulacyjnym. Sygnały Y1S i Y1 są sygnałami regulującymi moce bloków
według zasady proporcjonalnego rozdziału obciążeń, co oznacza że wszystkie zespoły zmie-
niają moc równocześnie proporcjonalnie do wielkości pasma regulacji i chwilowych wartości
tych sygnałów. Sygnałowi Y0 przyporządkowane są na blokach skokowe zmiany mocy gene-
rowanej, wspomagające regulacje w systemie według sygnałów Y1S i Y1, które polega na tym
aby w ustalonym czasie odbudować zdolności regulacyjne powyższych sygnałów przez spro-
wadzenie ich wartości do środkowej strefy przedziału ich zmian, a uchybu regulacyjnego E w
pobliże wartości zerowej. Przyporządkowanie zmian mocy generowanej bloków zmianom
sygnału Y0 może w skali systemu spełniać w pewnym stopniu wymagania regulacji trójnej,
czyli ekonomicznego rozdziału obciążeń. Uzyskamy to poprzez takie rozłożenie skokowych
zmian mocy na charakterystyce Y0, aby ekonomiczne bloki obciążały się w pierwszym rzę-
dzie, czyli przy mniejszych wartościach sygnału Y0 w porównaniu z blokami mniej ekono-
micznymi. Odciążanie zaś przebiega na odwrót dzięki czemu uzyskujemy dłuższy czas pracy
pod większym obciążeniem bloków bardziej ekonomicznych w stosunku do mniej ekono-
micznych.
Urządzenia układu transmisji sygnałów regulacyjnych i telepoleceń UTRT są przeznaczo-
ne kompleksowej transmisji sygnałów w celu dyspozytorskiego zarządzania systemem w za-
kresie regulacji, zarówno automatycznej jak i ręcznej, bilansu mocy czynnej oraz bilansu mo-
cy biernej. Urządzenia transmisyjne przesyłają z KDM do ODM-ów i dalej do regulowanych
obiektów w systemie następujące sygnały:
- regulacyjne Y1S, Y1, Y0 do elektrowni pracujących w układzie automatycznym;
- indywidualne telepolecenia adresowane do elektrowni pracujących w ARCM;
- sygnały ręcznej regulacji mocy RRC do elektrowni nie objętych telepoleceniami;
- sygnały wartości zadanych napięć do układów regulacji napięć i mocy biernej;
- sygnały ograniczeń napięciowych do ZDR;

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 47
- sygnały ograniczeń awaryjnych;
- inne sygnały jak np. sygnały ograniczeń energetycznych hut i pieców, czy informacje
o interwencyjnych zmianach sygnałów regulacyjnych ARCM.
System UTRT umożliwia przesył z ODM do podległych im obiektów energetycznych
własnych sygnałów bez zakłócania transmisji sygnałów z KDM. Obecnie trwają prace w ra-
mach programu DYSTER nad dwukierunkową transmisją informacji w relacjach między
elektrowniami i stacjami NN i WN oraz KDM i ODM [3, 4, 5, 6].
6 Wyposażenie sprzętowe układu ARCM znajdujące się w elek-trowniach KSE.
6.1 Elektrownie cieplne. Zgodnie z wymaganiami każdy blok energetyczny, dla potrzeb regulacji pierwotnej, po-
winien dysponować mocą o wartości ±5% jego mocy znamionowej, co wpłynęło na moderni-
zację układów automatycznej regulacji (UAR) bloków energetycznych, głównie od strony ko-
tłowej. Zostały także narzucone wymagania odnośnie szybkości zmian mocy bloków przy
zmianach częstotliwości. Układ regulacji pierwotnej ma w ciągu 5 s zmienić moc bloku o
50% mocy dysponowanej dla potrzeb regulacji pierwotnej, a pozostałe 50% nie później niż do
30 s.
6.1.1 Charakterystyka układów regulacji turbozespołów.
21 bloków energetycznych w KSE o mocy 120 i 200 MW wyposażono w układy elektro-
hydraulicznej regulacji mocy typu REH-10 (ITC) i RTFP-215 (IASE – ZRE Gdańsk), które
przestawiają zawory turbin, a UAR obciążenia bloku oddziałując na układ zasilania paliwem
utrzymuje stałe ciśnienie pary za kotłem.
W elektrowniach Turów, Dolna Odra i Łaziska, turbiny PWK 200, TK-200 i K-200-130-5
posiadają wspólny serwomotor zaworów regulacyjnych części wysokoprężnej WP i średnio-
prężnej SP. Układ ARCM steruje serwomotorem zaworów regulacyjnych przez parowy ogra-
nicznik mocy. W Elektrowni Pątnów regulator elektrohydrauliczny włączony jest wprost w
linię sterowania serwomotorem zaworów regulacyjnych.
Układy regulacji turbin 13K215 w elektrowniach Kozienice, Dolna Odra, Jaworzno III i
Połaniec posiadają niezależny serwomotor zaworów regulacyjnych części wysokoprężnej WP
i serwomotor zaworów regulacyjnych części średnioprężnej SP. Sygnał z układu ARCM zo-
stał wprowadzony w linię sterowania suwakiem pośredniczącym poprzez parowy ogranicznik
mocy. W Elektrowniach Pątnów i Rybnik z turbinami tego typu zaworami sterują regulatory
48
elektrohydrauliczne EHR. Tak wprowadzony sygnał z ARCM omija blok suwaków regulato-
ra prędkości obrotowej, który poza większymi nieczułościami może być źródłem niestabilnej
pracy turbozespołu.
Układy regulacji mocy turbin 360 MW mają wprowadzone sygnały z ARCM poprzez
UNIMAT na nastawnik prędkości obrotowej. Nastawnik ten działa na urządzenie rozruchu i
obciążania poprzez zmiany ciśnienia oleju, co powoduje przestawienie regulatora prędkości
obrotowej i zmianę ciśnienia oleju impulsowego sterującego zaworami regulacyjnymi WP
turbiny.
W układach regulacji turbin parowych TK 120 (bloki 120 MW) sygnały z ARCM są
wprowadzane na silnik nastawnika obrotów (Elektrownia Łagisza) a także poprzez serwomo-
tor elektrohydrauliczny (SEH) do oleju impulsowego sterującego zaworami regulacyjnymi
WP (Elektrownia Adamów i Elektrownia Konin). Na blokach tych elektrowni zostały zainsta-
lowane REH wykonane przez ITC Łódź. Włączenie REH do układu regulacji wprost w linię
sterowania zaworami WP umożliwiło ominięcie dwóch węzłów regulacji turbiny a mianowi-
cie nastawnika prędkości obrotowej i bloku suwaków regulatora obrotów (rys.6.1). Zmniejsza
to zbędne wahania zaworów regulacyjnych WP.

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 49
Rys
. 6.1
. R
egul
acja
prę
dkoś
ci o
brot
owej
turb
iny
TK 1
20 [3
].
*)
alte
rnat
ywne
włą
czen
ie sy
gnał
u A
RC
M;
**)
zmia
na st
opni
a ni
ejed
nost
ajnośc
i reg
ulac
ji.
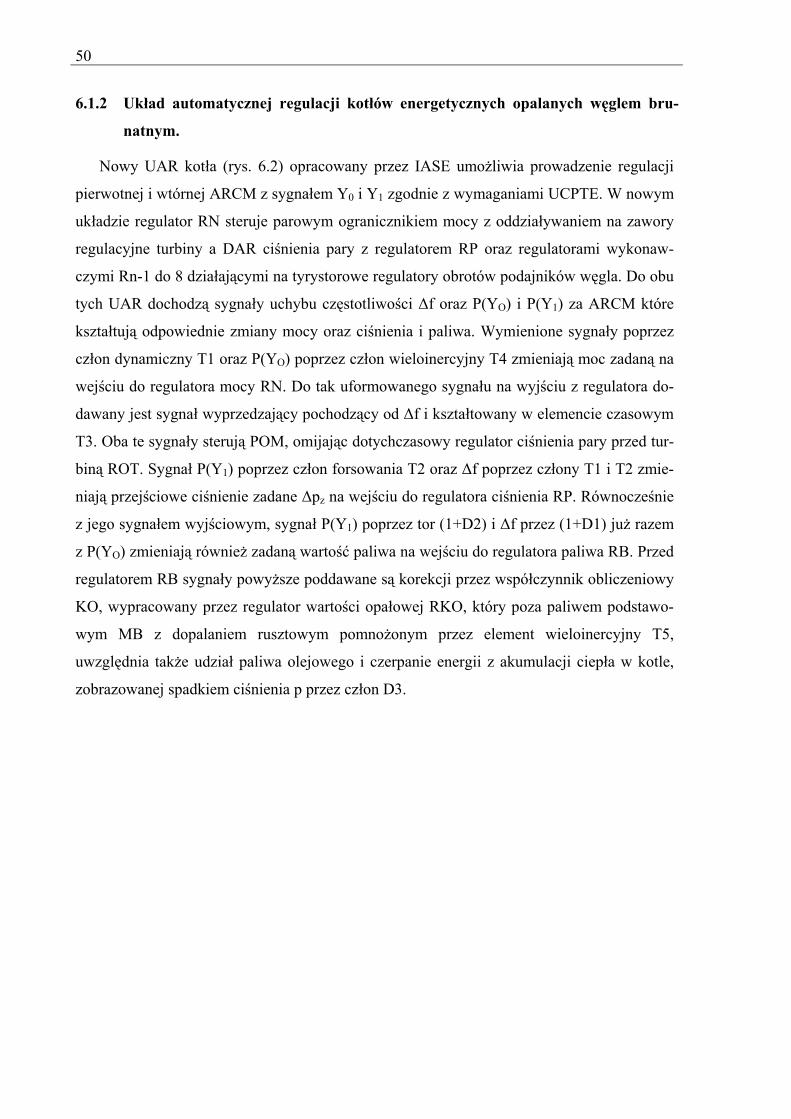
50
6.1.2 Układ automatycznej regulacji kotłów energetycznych opalanych węglem bru-
natnym.
Nowy UAR kotła (rys. 6.2) opracowany przez IASE umożliwia prowadzenie regulacji
pierwotnej i wtórnej ARCM z sygnałem Y0 i Y1 zgodnie z wymaganiami UCPTE. W nowym
układzie regulator RN steruje parowym ogranicznikiem mocy z oddziaływaniem na zawory
regulacyjne turbiny a DAR ciśnienia pary z regulatorem RP oraz regulatorami wykonaw-
czymi Rn-1 do 8 działającymi na tyrystorowe regulatory obrotów podajników węgla. Do obu
tych UAR dochodzą sygnały uchybu częstotliwości ∆f oraz P(YO) i P(Y1) za ARCM które
kształtują odpowiednie zmiany mocy oraz ciśnienia i paliwa. Wymienione sygnały poprzez
człon dynamiczny T1 oraz P(YO) poprzez człon wieloinercyjny T4 zmieniają moc zadaną na
wejściu do regulatora mocy RN. Do tak uformowanego sygnału na wyjściu z regulatora do-
dawany jest sygnał wyprzedzający pochodzący od ∆f i kształtowany w elemencie czasowym
T3. Oba te sygnały sterują POM, omijając dotychczasowy regulator ciśnienia pary przed tur-
biną ROT. Sygnał P(Y1) poprzez człon forsowania T2 oraz ∆f poprzez człony T1 i T2 zmie-
niają przejściowe ciśnienie zadane ∆pz na wejściu do regulatora ciśnienia RP. Równocześnie
z jego sygnałem wyjściowym, sygnał P(Y1) poprzez tor (1+D2) i ∆f przez (1+D1) już razem
z P(YO) zmieniają również zadaną wartość paliwa na wejściu do regulatora paliwa RB. Przed
regulatorem RB sygnały powyższe poddawane są korekcji przez współczynnik obliczeniowy
KO, wypracowany przez regulator wartości opałowej RKO, który poza paliwem podstawo-
wym MB z dopalaniem rusztowym pomnożonym przez element wieloinercyjny T5,
uwzględnia także udział paliwa olejowego i czerpanie energii z akumulacji ciepła w kotle,
zobrazowanej spadkiem ciśnienia p przez człon D3.

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 51
Rys. 6.2. Uproszczony schemat regulacji pierwotnej i wtórnej z sygnałami Y0 i Y1 w ARCM oraz układu re-
gulacji spalania na bloku nr. 3 w Elektrowni Turów [3].
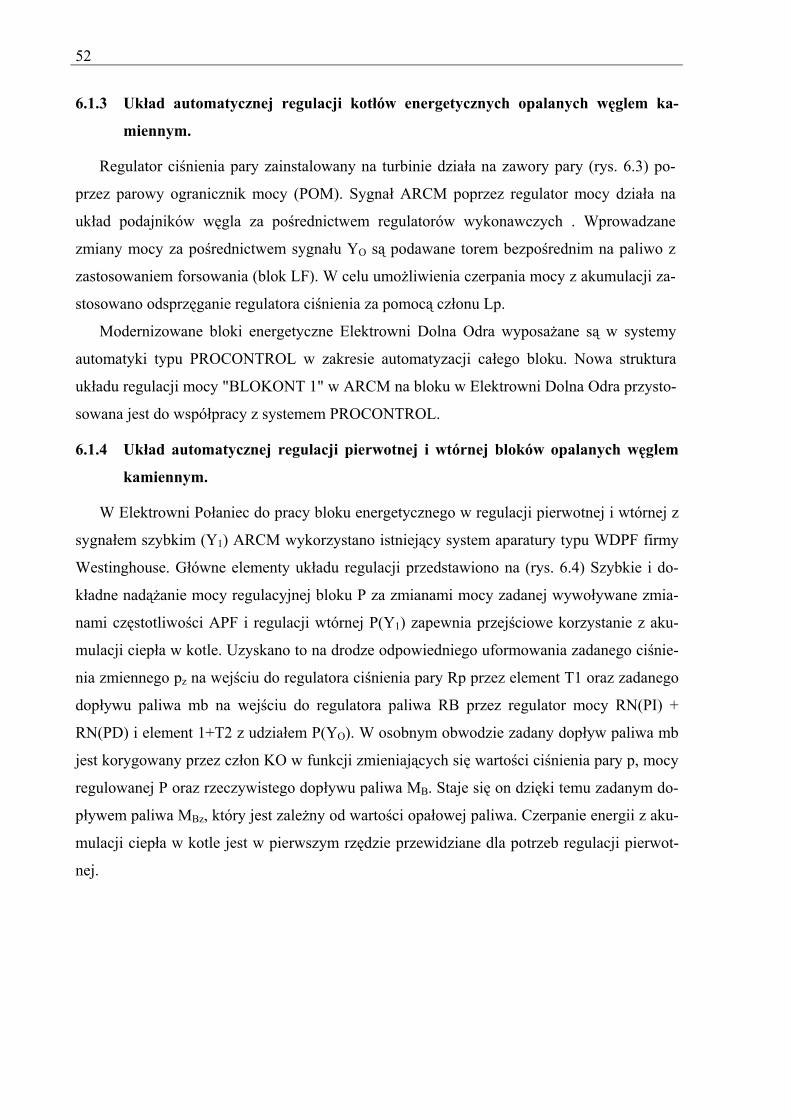
52
6.1.3 Układ automatycznej regulacji kotłów energetycznych opalanych węglem ka-
miennym.
Regulator ciśnienia pary zainstalowany na turbinie działa na zawory pary (rys. 6.3) po-
przez parowy ogranicznik mocy (POM). Sygnał ARCM poprzez regulator mocy działa na
układ podajników węgla za pośrednictwem regulatorów wykonawczych . Wprowadzane
zmiany mocy za pośrednictwem sygnału YO są podawane torem bezpośrednim na paliwo z
zastosowaniem forsowania (blok LF). W celu umożliwienia czerpania mocy z akumulacji za-
stosowano odsprzęganie regulatora ciśnienia za pomocą członu Lp.
Modernizowane bloki energetyczne Elektrowni Dolna Odra wyposażane są w systemy
automatyki typu PROCONTROL w zakresie automatyzacji całego bloku. Nowa struktura
układu regulacji mocy "BLOKONT 1" w ARCM na bloku w Elektrowni Dolna Odra przysto-
sowana jest do współpracy z systemem PROCONTROL.
6.1.4 Układ automatycznej regulacji pierwotnej i wtórnej bloków opalanych węglem
kamiennym.
W Elektrowni Połaniec do pracy bloku energetycznego w regulacji pierwotnej i wtórnej z
sygnałem szybkim (Y1) ARCM wykorzystano istniejący system aparatury typu WDPF firmy
Westinghouse. Główne elementy układu regulacji przedstawiono na (rys. 6.4) Szybkie i do-
kładne nadążanie mocy regulacyjnej bloku P za zmianami mocy zadanej wywoływane zmia-
nami częstotliwości APF i regulacji wtórnej P(Y1) zapewnia przejściowe korzystanie z aku-
mulacji ciepła w kotle. Uzyskano to na drodze odpowiedniego uformowania zadanego ciśnie-
nia zmiennego pz na wejściu do regulatora ciśnienia pary Rp przez element T1 oraz zadanego
dopływu paliwa mb na wejściu do regulatora paliwa RB przez regulator mocy RN(PI) +
RN(PD) i element 1+T2 z udziałem P(YO). W osobnym obwodzie zadany dopływ paliwa mb
jest korygowany przez człon KO w funkcji zmieniających się wartości ciśnienia pary p, mocy
regulowanej P oraz rzeczywistego dopływu paliwa MB. Staje się on dzięki temu zadanym do-
pływem paliwa MBz, który jest zależny od wartości opałowej paliwa. Czerpanie energii z aku-
mulacji ciepła w kotle jest w pierwszym rzędzie przewidziane dla potrzeb regulacji pierwot-
nej.

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 53
Rys. 6.3. Uproszczony schemat ideowy układu regulacji mocy „BLOKONT-1” w ARCM na bloku nr. 1
Elektrowni Dolna Odra [3].
54
Rys. 6.4. Uproszczony schemat regulacji pierwotnej i wtórnej z sygnałami Y0 i Y1 w ARCM na bloku 200 MW
w Elektrowni Połaniec [3].

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 55
6.2 Elektrownie wodne. Wyposażenie sprzętowe układów regulacji obrotów hydrozespołów oraz układów regula-
cji mocy czynnej i częstotliwości w elektrowniach wodnych jest różne w zależności od tego
kiedy budowana była elektrownia i od dostawców urządzeń.
Klasyczne układy regulacji z mechano hydraulicznymi regulatorami obrotów i elektro-
nicznymi regulatorami mocy pracują w elektrowniach Dychów, Rożnów, Solina, Żydowo i
Tresna. Nowocześniejsze układy z elektrohydraulicznymi regulatorami obrotów i elektronicz-
nymi regulatorami mocy pracują w elektrowniach Włocławek, Żar-Porąbka i Żarnowiec.
6.2.1 Wyposażenie sprzętowe układów regulacji mocy czynnej i częstotliwości w elek-
trowniach Dychów, Rożnów, Solina, Żydowo i Tresna
Uproszczony schemat ideowy regulacji mocy hydrozespołów tej grupy, pokazujący
współdziałanie układu regulacji wtórnej mocy w ARCM z sygnałem szybkozmiennym Y1S i
układu regulacji pierwotnej mocy od częstotliwości systemu pokazuje na przykładzie EPS
Żydowo (rys. 6.5). Układ składa się z trzech zasadniczych części:
— urządzeń odbiorczych systemu UTRT (odbiornik DRTO-2) i przetworników
c/a sygnału Y1S - część wspólna dla całej elektrowni;
— toru korekcji od uchybu częstotliwości systemu z mikroprocesorowym prze-
twornikiem częstotliwości PF-7 - oddzielny dla każdego turbozespołu;
— części wykonawczej dla każdego hydrozespołu z mikroprocesorowym regula-
torem mocy MRP-41 oddziałującej na moc hydrozespołu poprzez zmianę
stopnia otwarcia aparatu kierowniczego turbiny, realizowanego przez mecha-
no-hydrauliczny regulator obrotów.
Sygnał cyfrowy Y1S z regulatora centralnego w KDM odbierany jest przez odbiornik DR-
TO-2, kontrolowana jest jakość transmisji i następuje przetworzenie sygnału cyfrowego na
wartość analogową z oddzielnym torem sterowania dla poszczególnych hydrozespołów.
Zmiana prądu od -5 mA do +5 mA odpowiada zmianie mocy hydrozespołu od Pmin do
Pmax. W torze regulacji pierwotnej - korekcji mocy od częstotliwości systemu częstotliwość
jest przetwarzana w sposób nieliniowy na sygnał analogowy o wartości od 0,5 mA do +0,5
mA. Nieliniowość przetwarzania sygnału częstotliwości sieci wynika z wymagań PSE S.A.
dotyczących statycznej charakterystyki regulacji pierwotnej hydrozespołów: udział ±5% pn,
statyzm od 2 do 6%, strefy nieczułości (martwe) 20, 50, 100, 200 i 500 mHz.
Regulacja mocy jest realizowana przez regulator MRP-41 o charakterystyce Pl, którego
zadaniem jest takie sterowanie poprzez regulator obrotów przestawiający stopień otwarcia

56
aparatu kierowniczego turbiny, aby nadążanie mocy generowanej za zmianami mocy zada-
nej i zmianami częstotliwości, było zgodne z wymogami PSE SA. Oddziaływanie na regu-
lator obrotów może zachodzić przez silnik zmiany położenia nastawnika prędkości obroto-
wej turbiny (synchronizatora) lub przez silnik ogranicznika maksymalnego otwarcia apara-
tu kierowniczego, który w wielu przypadkach daje lepszą dynamikę zmian mocy w odpo-
wiedzi na impulsy sterujące regulatora.
6.2.2 Wyposażenie sprzętowe układów regulacji mocy czynnej i częstotliwości w Elek-
trowni Szczytowo-Pompowej Żar-Porąbka.
Hydrozespoły tej elektrowni wyposażone są w elektrohydrauliczne regulatory turbin typ
FRW 103 f-my ASEA (obecnie ABB). Regulator ten posiada elektroniczny układ pomiaru
częstotliwości i regulacji pierwotnej z możliwością nastawiania stref martwych, statyzmu i
udziału hydrozespołu w regulacji pierwotnej. Część elektroniczna regulatora posiada dodat-
kowe wejścia z możliwością przyłączenia sygnałów regulacyjnych (mocy zadanej) od układu
ARCM i/lub sygnałów korekcyjnych od poziomów wody (spadu). Na jedno z tych wejść zo-
stał włączony sygnał Y1S w postaci analogowej. Uproszczony schemat blokowy regulatora
przedstawia (rys. 6.6).

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 57
Rys. 6.5. Uproszczony schemat ideowy regulacji mocy hydrozespołów HZ1 i HZ2 w systemie ARCM w ESP
Żydowo [3].

58
Objaśnienia:
A1, 2 i 3 – wzmacniacze; no i ny – nastawniki mocy bazowej i regul. Y1S
C1 i 2 – człony całkujące; SV – wstępny siłownik elektro-hydrauliczny;
P1 – przetwornik mocy; MS – główny siłownik hydrauliczny;
Q1 i Q1a – przetwornik mocy i jego W – wybierak;
nastawnik strefy martwej ±∆fo; Z – zadajnik;
S – nastawnik statyzmu;
Y1S P ∆fz Zp - wielkości mierzone podczas pomiarów odbiorczych.
Rys. 6.6. Uproszczony schemat blokowy regulatora FRVV 103 (ASEA) na hydrozespołach o mocy 125 MW w Elektrowni Porąbka – Żar [3].
Regulacja częstotliwości i mocy w systemie elektroenergetycznym 59
6.2.3 Wyposażenie sprzętowe układów regulacji mocy czynnej i częstotliwości w Elek-
trowni Szczytowo-Pompowej Żarnowiec.
Wyposażenie sprzętowe układów automatycznej regulacji mocy czynnej i częstotliwości
w ESP Żarnowiec uległo w ostatnim okresie głębokiej modernizacji w celu rozszerzenia za-
kresu regulacji mocy. Obecnie na hydrozespołach pracuje następujące podstawowe wyposa-
żenie sprzętowe realizujące główne funkcje układu: — odbiornik DRTO-2 systemu UTRT;
- sterownik mikroprocesorowy SµP;
- przetwornik częstotliwości PF-7;
- regulator elektrohydrauliczny turbozespołu A-ROT-07+ERC (z CKD Blansko).
Schemat układu regulacji pokazano na rys. 6.7. Sygnał szybkozmienny Y1S z odbiornika
w kodzie cyfrowym binarnym równoległym podawany jest na wejście sterownika mikropro-
cesorowego SµP, który wypracowuje wartość zadaną mocy w formie sygnału analogowego
O do 10 V przystosowanego do wejścia regulatora AROT. Wartość zadana mocy uwzględnia
korekcję od częstotliwości sieci (regulacja pierwotna według wymagań PSE SA) i od pozio-
mu wody w zbiorniku górnym (przy niższym poziomie od 124 m npm hydrozespół nie osią-
ga mocy nominalnej 190 MW). Tak uformowany sygnał mocy zadanej porównywany jest z
sygnałem mocy generowanej a różnica tych sygnałów przez regulator Pl podawana jest na
regulator elektrohydrauliczny turbiny AROT. Zastosowany w układzie mikroprocesorowy
przetwornik częstotliwości PF-7 umożliwia nastawianie strefy martwej częstotliwości, staty-
zmu i ograniczenia udziału hydrozespołu w regulacji pierwotnej zgodnie z wymaganiami
PSE SA.
Podstawowy obszar regulacji mocy w ESP Żarnowiec był ograniczony względami tech-
nologicznymi takimi jak:
- poziom wody w zbiorniku górnym;
- poziom drgań osiowych i promieniowych hydrozespołów;
- pulsacje ciśnień i rurze ssącej turbiny;
- naprężenia w płaszczu rurociągu derywacyjnego, doprowadzającego wodę do turbiny
występujące w trakcie szybkich (awaryjnych) odstawień turbozespołu.
Wykonane prace badawcze, dotyczące tych ograniczeń oraz rozwój techniki sterowników
mikroprocesorowych umożliwiły rozszerzenie zakresu regulacji mocy w układzie ARCM,
skojarzonej z regulacją pierwotną i wykorzystanie dwóch obszarów regulacji mocy: istnieją-
cego obszaru wysokich obciążeń i nowego obszaru niskich obciążeń – (rys.6.8). Oba te obsza-
ry oddzielone są strefą przejść - gdzie nie jest dopuszczalna trwała praca hydrozespołów. Z
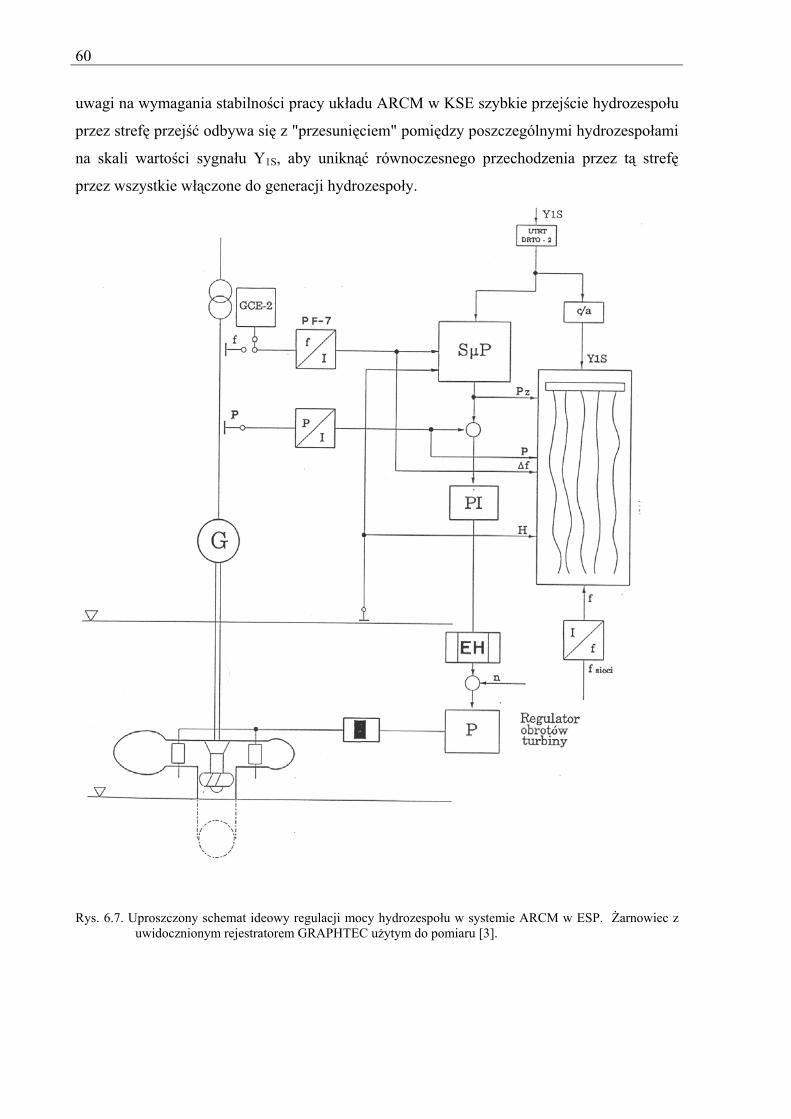
60
uwagi na wymagania stabilności pracy układu ARCM w KSE szybkie przejście hydrozespołu
przez strefę przejść odbywa się z "przesunięciem" pomiędzy poszczególnymi hydrozespołami
na skali wartości sygnału Y1S, aby uniknąć równoczesnego przechodzenia przez tą strefę
przez wszystkie włączone do generacji hydrozespoły.
Rys. 6.7. Uproszczony schemat ideowy regulacji mocy hydrozespołu w systemie ARCM w ESP. Żarnowiec z
uwidocznionym rejestratorem GRAPHTEC użytym do pomiaru [3].

Regulacja częstotliwości i mocy w systemie elektroenergetycznym 61
Rys. 6.8. Obszary regulacji ARCM hydrozespołów ESP. Żarnowiec [3].
62
7 Bibliografia: [1]. Bernas S.: Systemy elektroenergetyczne. Warszawa, WNT 1982. [2]. Bernas S., Ciok Z.: Modele matematyczne elementów systemu elektroenergetycznego. Warszawa,
WNT 1977. [3]. Bujko J., Halawa T.: Dekompozycja procesu kierowania KSE, podział zadań i kompetencji na po-
szczególne poziomy w zakresie regulacji mocy czynnej. Opracowanie IASE Wrocław, luty 1996 r. Konsorcjum Politechniki Gdańskiej Warszawskiej i Śląskiej 09/2-...,2.2.2/32/95.
[4]. Bujko J., Halawa T.: Rozpoznanie nowych zadań sterowniczych oraz dekompozycja procesu kie-rowania KSE w zakresie regulacji mocy czynnej i częstotliwości z uwzględnieniem ERO w warun-kach restrukturyzacji energetyki krajowej i przewidywanej współpracy z systemem UCPTE. Opra-cowanie IASE Wrocław, grudzień 1995 r. Konsorcjum Politechniki Gdańskiej Warszawskiej i Śląskiej 09/2-2.1.2, 2.2.2 /32/95.
[5]. Bujko J., Halawa T.: Rozpoznanie nowych zadań sterowniczych w zakresie regulacji mocy czyn-nej, wynikających z restrukturyzacji elektroenergetyki krajowej i przewidywanej współpracy z sys-temem UCPTE. Opracowanie IASE Wrocław, luty 1996 r. Konsorcjum Politechniki Gdańskiej Warszawskiej i Śląskiej 09/2-2.1.2,.../32/95.
[6]. Bujko J., Wierzbicki Z., Smoliński A.: Stan obecny i potrzeby modernizacyjne regulacji systemo-wej w KSE. Automatyk Elektroenergetyczna 1998. Nr 1, s. 4 – 7.
[7]. Cegielski M.: Sieci i systemy elektroenergetyczne. Warszawa-Wrocław, PWN 1979. [8]. Gładyś H.: Komputery w kierowaniu pracą systemu elektroenergetycznego. Warszawa, WNT
1980. [9]. Gładyś H., Matla R.: Praca elektrowni w systemie elektroenergetycznym. Wrocław – Warszawa,
WNT 1999. [10]. Halawa T.: Regulacja mocy w krajowym systemie elektroenergetycznym. Energetyka 1985. Nr 8,
s. 328 – 331. [11]. Hellmann W., Szczerba Z.: Regulacja częstotliwości i napięcia w systemie elektro-
energetycznym. Warszawa, WNT 1978. [12]. Krawet A.: Obecny stan, wymagania i propozycje dostosowania ARCM bloków energetycznych
do wymagań UCPTE. Energetyka 1992. Nr 4, s. 117 – 121. [13]. Janiczek R.: Eksploatacja elektrowni parowych. Wyd. 2, Warszawa, WNT 1992. [14]. Jasicki Z.: Elektromechaniczne stany przejściowe w systemach elektroenergetycznych. Tom 1,
Wyd. 1, Warszawa, PWN 1987. [15]. Kundur P.: Power system stability and control. Mc Graw Hill 1994. [16]. Laudyn D., Pawlik M., Strzelczyk F.: Elektrownie. Wyd. 3, Warszawa, WNT 1997. [17]. Machowski J., Bernas S.: Stany nieustalone i stabilność systemu elektroenergetycznego. War-
szawa, WNT 1989. [18]. Obaleński W., Wrona J.: Regulacja wtórnej mocy i częstotliwości w nowych warunkach pracy
KSE. Energetyka 1996. Nr 3, s. 133 – 136. [19]. Pasierbski F., Wrona J.: Regulator centralny układu automatycznej regulacji częstotliwości i mo-
cy systemu elektroenergetycznego ARCM-2. Energetyka 1976. Nr 12, s. 461 – 483. [20]. Pawlik M., Skierski J.: Układy i urządzenia potrzeb własnych elektrowni. Warszawa, WNT 1986. [21]. Praca zbiorowa: Poradnik Inżyniera Elektryka. Tom 3, Warszawa, WNT 1996. [22]. Rakowski J.: Automatyka cieplnych urządzeń siłowni. Warszawa WNT 1976. [23]. Strzelczyk F.: Odwzorowanie przegrzewaczy pary i podgrzewaczy wody w matematycznym mo-
delu kotła. Archiwum Energetyki Nr 3-4, 1992. [25]. Szczerba Z.: Regulacja grupowa w systemie elektroenergetycznym – za i przeciw. Automatyka
Elektroenergetyczna 1997. Nr 3-4, s. 28 – 30. [26]. Zajczyk R.: Modele matematyczne elementów systemu elektroenergetycznego do badania stanów
nieustalonych. Wydawnictwo Politechniki Gdańskiej, seria Monografie, Gdańsk 2002. [27]. Zajczyk R., i inni: Modele zespołów wytwórczych do badania stanów nieustalonych. Prace wy-
konane w Instytucie Elektroenergetyki i Automatyki, Gdańsk 1987. [28]. Zajczyk R.: Sterowanie pracą elektroenergetycznego węzła wytwórczego w stanach nieustalo-
nych. Zeszyty naukowe PG, Gdańsk 1996.