
Nr karty: 1/2 KARTA PROGRAMU RAMOWEGO PRZEDMIOTU … · Literatura: 1) Jakubiec W., Malinowski J....
40
Nr karty: 1/2 KARTA PROGRAMU RAMOWEGO PRZEDMIOTU PW - WZ METROLOGIA METROLOGY 1. Identyfikator przedmiotu Rodzaj studiów : Studia I-go stopnia inżynierskie Kierunek : Inżynieria : Symbol jednostki dydaktycznej W15 L15 Rodzaj : kierunkowe techniczne Symbol : Semestr : Grupa : Nr w siatce studiów : Data opracowania : 2008 2. Oczekiwane efekty kształcenia Umiejętności i kompetencje korzystania z aparatury pomiarowej i metrologii warsztatowej oraz metod oszacowania błędów 3. Forma zaliczenia zajęć: Wykład + zaliczone laboratorium razem zakończone egzaminem. 4. Autor programu ramowego: Dr inż. Aam Biernat 5. Pomoce dydaktyczne: Wersja elektroniczna wykładu, prezentacje komputerowe (Power Point), instrukcje do ćwiczeń, literatura uzupełniająca 6. Wydział PW, Zakład wiodący: Zakład Maszyn Elektrycznych, Instytut Maszyn Elektrycznych 7. Program ramowy jednostki dydaktycznej: Wykład Metrologia – przedmiot i zadania. Pomiar jako źródło informacji. Wielkość, pomiar, wzorzec, źródło sygnałów wzorcowych, przyrząd pomiarowy. Przetworniki pomiarowe wielkości elektrycznych i nieelektrycznych: klasyfikacja, budowa, zakres stosowania. Międzynarodowy układ jednostek miar. Błędy pomiaru, źródła błędów, niepewnośc pomiaru. Wyrażenie i wyznaczenie niepewności pomiaru według przewodnika ISO. Metrologia wielkości geometrycznych: specyfikacja geometrii wyrobów, wzorce długości i kąta, przyrządy pomiarowe i pomiary długości, kąta, odchyłek geometrycznych oraz chropowatości powierzchni. Metody i techniki pomiaru innych wielkości: elektrycznych (prądu, napięcia, rezystancji, pojemności, indukcyjności), magnetycznych (strumienia magnetycznego, indukcji magnetycznej, stratności magnetycznej), mechanicznych (prędkości liniowej i kątowej, przyspieszenia siły), hydraulicznych (ciśnienia, prędkości przepływu). Analogowe i cyfrowe systemy pomiarowe, wstęp do przetwarzania danych pomiarowych. Spójność pomiarowa, hierarchiczny układ sprawdzań. Nadzorowanie wyposażenia pomiarowego. Laboratorium - Pomiary kąta metodami optycznymi; - Pomiar odkształceń geometrycznych powierzchni komutatora maszyny elektrycznej w stanie dynamicznym; - Pomiar wydatku medium chłodzącego metodami kalorymetrycznymi; - Pomiar mocy mechanicznej elektromechanicznego przetwornika energii (wyznaczanie strat mechanicznych); - Pomiar bezwładności brył obrotowych metodą rewersu; - Pomiar parametrów ruchu liniowego. 8. Jednostki dydaktyczne poprzedzające: Przedmiot prowadzony od podstaw, 1 semestr matematyki
Transcript of Nr karty: 1/2 KARTA PROGRAMU RAMOWEGO PRZEDMIOTU … · Literatura: 1) Jakubiec W., Malinowski J....
Nr karty: 1/2 KARTA PROGRAMU RAMOWEGO PRZEDMIOTU PW - WZ
METROLOGIA
METROLOGY 1. Identyfikator przedmiotu
Rodzaj studiów : Studia I-go stopnia inżynierskie
Kierunek :
Inżynieria :
Symbol jednostki dydaktycznej
W15 L15
Rodzaj : kierunkowe techniczne Symbol : Semestr :
Grupa : Nr w siatce studiów : Data opracowania : 2008
2. Oczekiwane efekty kształcenia
Umiejętności i kompetencje korzystania z aparatury pomiarowej i metrologii warsztatowej oraz metod
oszacowania błędów
3. Forma zaliczenia zajęć:
Wykład + zaliczone laboratorium razem zakończone egzaminem.
4. Autor programu ramowego:
Dr inż. Aam Biernat
5. Pomoce dydaktyczne:
Wersja elektroniczna wykładu, prezentacje komputerowe (Power Point), instrukcje do ćwiczeń, literatura
uzupełniająca
6. Wydział PW, Zakład wiodący: Zakład Maszyn Elektrycznych, Instytut Maszyn Elektrycznych
7. Program ramowy jednostki dydaktycznej:
Wykład
Metrologia – przedmiot i zadania. Pomiar jako źródło informacji. Wielkość, pomiar, wzorzec, źródło sygnałów
wzorcowych, przyrząd pomiarowy. Przetworniki pomiarowe wielkości elektrycznych i nieelektrycznych:
klasyfikacja, budowa, zakres stosowania. Międzynarodowy układ jednostek miar. Błędy pomiaru, źródła błędów,
niepewnośc pomiaru. Wyrażenie i wyznaczenie niepewności pomiaru według przewodnika ISO. Metrologia
wielkości geometrycznych: specyfikacja geometrii wyrobów, wzorce długości i kąta, przyrządy pomiarowe i
pomiary długości, kąta, odchyłek geometrycznych oraz chropowatości powierzchni. Metody i techniki pomiaru
innych wielkości: elektrycznych (prądu, napięcia, rezystancji, pojemności, indukcyjności), magnetycznych
(strumienia magnetycznego, indukcji magnetycznej, stratności magnetycznej), mechanicznych (prędkości
liniowej i kątowej, przyspieszenia siły), hydraulicznych (ciśnienia, prędkości przepływu). Analogowe i cyfrowe
systemy pomiarowe, wstęp do przetwarzania danych pomiarowych. Spójność pomiarowa, hierarchiczny układ
sprawdzań. Nadzorowanie wyposażenia pomiarowego.
Laboratorium
- Pomiary kąta metodami optycznymi;
- Pomiar odkształceń geometrycznych powierzchni komutatora maszyny elektrycznej w stanie dynamicznym;
- Pomiar wydatku medium chłodzącego metodami kalorymetrycznymi;
- Pomiar mocy mechanicznej elektromechanicznego przetwornika energii (wyznaczanie strat mechanicznych);
- Pomiar bezwładności brył obrotowych metodą rewersu;
- Pomiar parametrów ruchu liniowego.
8. Jednostki dydaktyczne poprzedzające:
Przedmiot prowadzony od podstaw, 1 semestr matematyki

Literatura:
1) Jakubiec W., Malinowski J. Metrologia wielkości geometrycznych. WNT 1993.
2) Chwalebna A., Koniński M., Siedlecki A. Metrologia elektryczna. WNT 2007.
3) Czujniki i metody pomiarowe wielkości fizycznych i składu chemicznego. Pod redakcją prof. Dr hab. inż.
Janusza Piotrkowskiego. WNT 2009.
4) Arendarski J. Niepewność pomiarów. WPW 2005
5) Dusza J., Gortat G., Leśniewski A. Podstawy miernictwa. WPW 2007.
6) Czajewski J. Podstawy metrologii elektrycznej. WPW 2008.
7) Tumański S. Technika pomiarowa. WNT 2007.
8) Chwalebna A., Czajewski J. Przetworniki pomiarowe i defektoskopowe. WPW 1998.
9) Elementy metrologii wielkości geometrycznych. Przykłady i zadania. WPW 2000.
10) Ratajczyk E. Współrzędnościowa technika pomiarowa. WPW 2005

1. Metrologia – przedmiot i zadania
Nazwa metrologia pochodzi od greckiego słowa „μεηρου” – miara i „λογζ” – słowo, nauka. Metrologia jest
nauką o realizacji (za pomocą odpowiednich środków technicznych i organizacyjnych) pomiarów we wszystkich
dziedzinach nauki, techniki i gospodarki. Wyniki pomiarów są źródłem obiektywnej informacji o
właściwościach zjawisk i ciał.
Pomiarem nazywamy ilościowe wyznaczenia na drodze eksperymentu cechy zjawiska, ciała lub procesu (w
pomiarach klasycznych – masę, ciężar, temperaturę, napięcie, ale także inteligencję lub efektywność danego
procesu). W wielu wypadkach istnieje możliwość utworzenia skali pomiarowej. Cechę zjawiska, dla której
można utworzyć skalę nazywamy wielkością. Wtedy pomiar będzie polegał na ustaleniu stosunku do innej
wielkości tego samego rodzaju (wzorca) przyjętej za jednostkę miary.
Po przyjęciu odpowiedniej jednostki miary wartość każdej wielkości xw można przedstawić za pomocą
iloczynu liczby rzeczywistej x i jednostki miary am:
mw axx . (1)
Oznacza to, że wynik pomiaru jest wyrażany zawsze w odniesieniu do wzorca.
Wielkości mierzalne mogą mieć strukturę ciągłą (analogową) lub ziarnistą (dyskretną). Wielkości ciągłe
mogą w danym przedziale przyjmować nieskończenie wiele wartości różniących się przyrostami elementarnymi.
Wielkości ziarniste przyjmują w danym przedziale tylko określone wartości różniące się skończonymi
przyrostami. Najmniejszy możliwy przyrost stanowi elementarny kwant (ziarno) wielkości dyskretnej.
2. Układ Jednostek
Zbiór jednostek wielkości mierzalnych nosi nazwę układu jednostek miar. Na przestrzeni dziejów powstało
wiele układów jednostek, których wzorce stale doskonalono, układy jednostek zastępowano bardziej
uniwersalnymi starając się wykorzystać niezmienność właściwości materiałowych. Przykładem jest wzorzec
długości – metr ustalony jako 1/10 000 000 ćwiartki południka przechodzącego przez Paryż i odwzorowany w
platynowo-irydowym wzorcu).
Dążono także do zdefiniowania (wprowadzenia) takiego układu jednostek, w którym definiuje się niewielką
liczbę jednostek podstawowych. Jednostki pochodne ustala się na podstawie zależności matematycznych
wiążących je z wielkościami podstawowymi. Na przykład mając zdefiniowane jednostki masy, czasu i długości
można określić jednostkę prędkości, gęstości lub przyspieszenia.
Minimalna liczba jednostek podstawowych mmin wynika z liczby k niezależnych równań opisujących daną
dziedzinę wiedzy oraz z liczby n wielkości występujących w tych równaniach:
knmmin . (2)
W mechanice występuje 39 wielkości wchodzących w układ 36 równań, wymagana liczba jednostek
podstawowych wynosi trzy (metr, kilogram, sekunda). Elektrotechnika wymaga wprowadzenia dodatkowych
jednostek wynikających z równań Maxwella:
sjlH
sBt
lE
dd
dd
dd
, (3)
w których występuje 6 niezależnych wielkości:
E – natężenie pola elektrycznego,
B – indukcja magnetyczna;
t – czas,
H – natężenie pola magnetycznego,
l – długość.
Do opisania dziedziny elektrotechniki konieczne są cztery jednostki (k – n = 4). Trzy jednostki przyjęto z działu
mechaniki, jako czwartą jednostkę w obecnie obowiązującym układzie SI przyjęto jednostkę natężenia prądu –
amper.
2.1 Układ SI
W 1960 roku Generalna Konferencja Miar zaleciła wprowadzenie Międzynarodowego Układu jednostek
Miar SI (Systeme International d’Unitès). W Polsce obowiązuje on od 1980 roku. Układ SI obejmuje wszystkie
dziedziny wiedzy i nauki. Wyróżniono w nim 9 jednostek podstawowych.
1- Metr - długość równa 1650763,73 długości fali promieniowania odpowiadającego przejściu
pomiędzy poziomami 2p10 a 5d5 atomu kryptonu 86 (najnowsza definicja: droga przebyta
przez światło w ciągu 1/299 792 458 sekundy, dokładność ± 0.13 nm),
2- Kilogram - masa międzynarodowego wzorca przechowywanego w Międzynarodowym Biurze Miar w
Sevres,
3- Sekunda - czas równy 9 192631 771 okresu promieniowania odpowiadającego przejściu między dwoma
nadsubtelnymi poziomami stanu podstawowego atomu cezu (133 Cs),
4- Amper - natężenie prądu elektrycznego, który płynie w dwóch równoodległych, prostoliniowych,
nieskończenie długich przewodach o przekroju okrągłym znikomo małym, umieszczonych w
odległości 1 m od siebie w próżni wywołującego między przewodami siłę równą 2.10-7
N na
każdy metr długości przewodu.,
5- Kalwin - temperatura równa 1/273,16 temperatury termodynamicznej potrójnego punktu wody,
6- Kandela1- światłość, którą w kierunku prostopadłym ma powierzchnia 1/600 000 m2 promiennika
zupełnego w temperaturze krzepnięcia platyny pod ciśnieniem 101325 Pa,
7- Mol - ilość materii zawierającej taka samą liczbę cząsteczek lub atomów, jaka liczbę atomów
zawiera 0.012 kg czystego izotopu węgla 12C,
8- Radian - kąt płaski o wierzchołku w środku koła, wycinający z obwodu tego koła łuk o długości
równej promieniowi,
9- Steradian - kąt bryłowy o wierzchołku w środku kuli wycinającej z powierzchni tej kuli pole równe
kwadratowi promienia.
Jednostki 8 i 9 bywają nazywane jednostkami uzupełniającymi.
Pozostałe jednostki - jednostki pochodne ustalone zostały zgodnie z prawami fizyki z wykorzystaniem jednostek
podstawowych. Na przykład:
prędkość liniowa - m/s = m·s-1
,
prędkość kątowa - rad/s = rad·s-1
,
ciśnienie [Pa] - N/m2 = m
-1·kg·s
-2,
moc [W] - J/s = N·m/s = m2·kg·s
-3.
napięcie [V] - W/A = m2·kg·s
-3·A
-1 (wolt jest różnicą potencjałów elektrycznych między
dwoma punktami przewodu liniowego, w którym płynie prąd o natężeniu 1A
gdy moc pobrana między tymi punktami jest równa 1·W).
Jednostki podstawowe i jednostki pochodne są odtwarzane za pomocą wzorców wykonanych z ograniczoną,
ale ściśle określoną dokładnością.
3. Wzorce wielkości elektrycznych i nieelektrycznych, klasyfikacja narzędzi
pomiarowych
Narzędzia pomiarowe dzielimy na:
- etalony (wzorce) – narzędzia pomiarowe przeznaczone do określenia, zrealizowania, zachowania lub
odtworzenia jednostki miary. Etalony w odróżnieniu od narzędzi pomiarowych użytkowych są
przeznaczone do sprawdzania innych narzędzi pomiarowych. Od wzorców wymaga się niezmienności w
czasie, dużej dokładności i łatwości stosowania.
- narzędzia pomiarowe użytkowe – zespół środków technicznych służący do wykonywania pomiarów w
warunkach produkcyjnych lub laboratoryjnych.
- narzędzia pomiarowe pomocnicze – służą do pomiarów wielkości niebędących celem pomiaru, lecz
mających wpływ na wartość wielkości mierzonej (na przykład termometr kontaktowy do pomiaru
temperatury obiektu poddawanego pomiarom współrzędnościowym).
3.1 Etalony.
Etalon wzorcowego napięcia stałego – ogniwo Westona.
Rozróżniamy ogniwa nasycone i nienasycone. Schemat budowy ogniwa nasyconego przedstawiony został
na Rys.1.
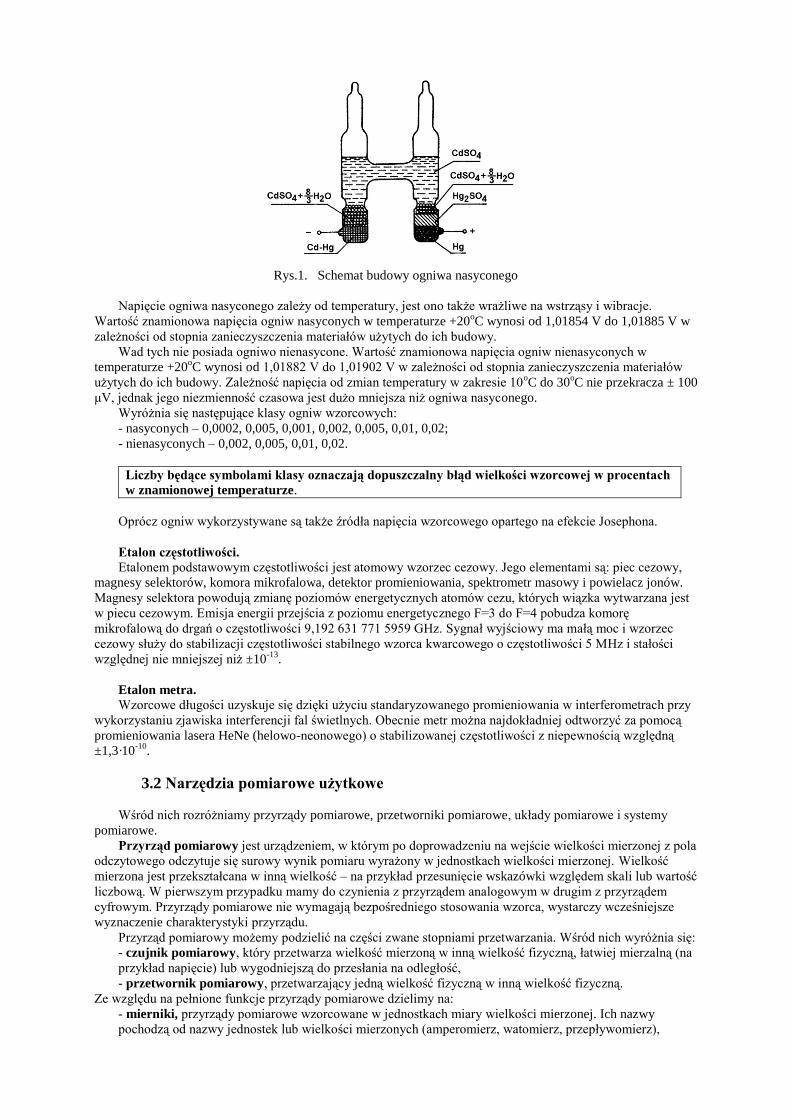
Rys.1. Schemat budowy ogniwa nasyconego
Napięcie ogniwa nasyconego zależy od temperatury, jest ono także wrażliwe na wstrząsy i wibracje.
Wartość znamionowa napięcia ogniw nasyconych w temperaturze +20oC wynosi od 1,01854 V do 1,01885 V w
zależności od stopnia zanieczyszczenia materiałów użytych do ich budowy.
Wad tych nie posiada ogniwo nienasycone. Wartość znamionowa napięcia ogniw nienasyconych w
temperaturze +20oC wynosi od 1,01882 V do 1,01902 V w zależności od stopnia zanieczyszczenia materiałów
użytych do ich budowy. Zależność napięcia od zmian temperatury w zakresie 10oC do 30
oC nie przekracza ± 100
μV, jednak jego niezmienność czasowa jest dużo mniejsza niż ogniwa nasyconego.
Wyróżnia się następujące klasy ogniw wzorcowych:
- nasyconych – 0,0002, 0,005, 0,001, 0,002, 0,005, 0,01, 0,02;
- nienasyconych – 0,002, 0,005, 0,01, 0,02.
Liczby będące symbolami klasy oznaczają dopuszczalny błąd wielkości wzorcowej w procentach
w znamionowej temperaturze.
Oprócz ogniw wykorzystywane są także źródła napięcia wzorcowego opartego na efekcie Josephona.
Etalon częstotliwości.
Etalonem podstawowym częstotliwości jest atomowy wzorzec cezowy. Jego elementami są: piec cezowy,
magnesy selektorów, komora mikrofalowa, detektor promieniowania, spektrometr masowy i powielacz jonów.
Magnesy selektora powodują zmianę poziomów energetycznych atomów cezu, których wiązka wytwarzana jest
w piecu cezowym. Emisja energii przejścia z poziomu energetycznego F=3 do F=4 pobudza komorę
mikrofalową do drgań o częstotliwości 9,192 631 771 5959 GHz. Sygnał wyjściowy ma małą moc i wzorzec
cezowy służy do stabilizacji częstotliwości stabilnego wzorca kwarcowego o częstotliwości 5 MHz i stałości
względnej nie mniejszej niż ±10-13
.
Etalon metra.
Wzorcowe długości uzyskuje się dzięki użyciu standaryzowanego promieniowania w interferometrach przy
wykorzystaniu zjawiska interferencji fal świetlnych. Obecnie metr można najdokładniej odtworzyć za pomocą
promieniowania lasera HeNe (helowo-neonowego) o stabilizowanej częstotliwości z niepewnością względną
±1,3·10-10
.
3.2 Narzędzia pomiarowe użytkowe
Wśród nich rozróżniamy przyrządy pomiarowe, przetworniki pomiarowe, układy pomiarowe i systemy
pomiarowe.
Przyrząd pomiarowy jest urządzeniem, w którym po doprowadzeniu na wejście wielkości mierzonej z pola
odczytowego odczytuje się surowy wynik pomiaru wyrażony w jednostkach wielkości mierzonej. Wielkość
mierzona jest przekształcana w inną wielkość – na przykład przesunięcie wskazówki względem skali lub wartość
liczbową. W pierwszym przypadku mamy do czynienia z przyrządem analogowym w drugim z przyrządem
cyfrowym. Przyrządy pomiarowe nie wymagają bezpośredniego stosowania wzorca, wystarczy wcześniejsze
wyznaczenie charakterystyki przyrządu.
Przyrząd pomiarowy możemy podzielić na części zwane stopniami przetwarzania. Wśród nich wyróżnia się:
- czujnik pomiarowy, który przetwarza wielkość mierzoną w inną wielkość fizyczną, łatwiej mierzalną (na
przykład napięcie) lub wygodniejszą do przesłania na odległość,
- przetwornik pomiarowy, przetwarzający jedną wielkość fizyczną w inną wielkość fizyczną.
Ze względu na pełnione funkcje przyrządy pomiarowe dzielimy na:
- mierniki, przyrządy pomiarowe wzorcowane w jednostkach miary wielkości mierzonej. Ich nazwy
pochodzą od nazwy jednostek lub wielkości mierzonych (amperomierz, watomierz, przepływomierz),
- rejestratory, przyrządy umożliwiające zapis wartości wielkości mierzonej w funkcji innej wielkości (na
przykład czasu),
- liczniki, przyrządy, które sumują (całkują) wartość wielkości mierzonej w ciągu pewnego czasu (licznik
energii elektrycznej, miernik wydatku),
- detektory zera, przyrządy służące do stwierdzenia istnienia lub zaniku kontrolowanej wielkości.
Przetworniki pomiarowe. W procesie pomiarowym umożliwiają wygodnie porównanie wielkości
mierzonej i wzorcowej. Zmiana wielkości X w wielkość Y przy zachowaniu informacji o wielkości X nosi nazwę
przetwarzania i dokonywana jest w przetworniku pomiarowym. Nową wielkość Y o tym samym lub innym
charakterze fizycznym nazywamy sygnałem pomiarowym. Sygnał pomiarowy zawiera informację pomiarową,
co oznacza, że wartość wielkości mierzonej można wyznaczyć z wartości sygnału.
Przyjmując jako kryterium postać sygnału pomiarowego na wejściu i wyjściu przetworniki podzielić można
na cztery grupy:
- analogowo – analogowe,
- analogowo – cyfrowe,
- cyfrowo – cyfrowe,
- cyfrowo – analogowe.
Przetworniki analogowo – analogowe i cyfrowo – cyfrowe spełniają rolę bloków standaryzujących i
dopasowujących. Przetworniki pomiarowe mogą być zintegrowane w przyrządach pomiarowych lub stanowić
wydzielone jednostki funkcjonalne układu pomiarowego lub systemu pomiarowego.
Układy pomiarowe. Stosujemy wtedy, gdy proces pomiarowy wymaga zastosowania zestawu przyrządów i
przetworników pomiarowych. Układ pomiarowy umożliwia pobranie, przetworzenie, zapamiętanie i prezentację
informacji pomiarowej.
Systemy pomiarowe. Są to układy pomiarowe objęte wspólnym sterowaniem, tworzące jedną
organizacyjną całość. Informacje pomiarowe pobierane przez system pomiarowy dotyczą wielu różnych
parametrów charakteryzujących badane zjawisko. Istotną cechą systemów pomiarowych jest zdolność
zaawansowanego przetwarzania sygnałów i informacji oraz przesyłania ich na odległość.
3.3 Właściwości metrologiczne narzędzi pomiarowych.
Parametry znamienne (dane charakterystyczne przyrządów) opisują ich właściwości metrologiczne.
- Nazwa przyrządu. Określa rodzaj wielkości mierzonej, zasadę pomiarową (zjawisko fizyczne stanowiące
podstawę pomiaru) oraz metodę pomiaru (sposób porównania wielkości mierzonej z wielkością wzorcową,
na przykład metoda kompensacyjna, metoda mostkowa).
- Nazwa wielkości mierzonej i jednostka miary.
- Zakres pomiarowy. Zbiór wartości wielkości mierzonej odtwarzany przez przyrząd, charakteryzowany
przez kres dolny i kres górny. Przyrządy mogą być jedno lub wielozakresowe.
- Dokładność. Zdolność przyrządu do odtworzenia wielkości wzorcowej z określoną niedokładnością
(błędem).Wyróżnia się następujące błędy:
Błąd podstawowy. Występujący w warunkach odniesienia, Składają się na niego: błąd wzorcowania
(zależny od dokładności wzorców i estymacji charakterystyki przyrządu), błąd nieliniowości (błąd
aproksymacji nieliniowej charakterystyki przyrządu do charakterystyki liniowej lub innej standardowej
charakterystyki, nowoczesne przyrządy uwzględniają nieliniowość charakterystyki), błąd niestałości
(wynik starzenia się i zużywania przyrządu), błąd kwantowania i błąd histerezy (zależność od kierunku
zmian sygnału wejściowego). Miarą błędu podstawowego jest błąd dopuszczalny lub graniczny.
Błędy dodatkowe. Spowodowane odmiennością warunków pomiaru i warunków odniesienia. Każda z
wielkości wpływających jest oddzielnym i niezależnym źródłem błędu. Najczęściej błędy dodatkowe
wyznacza się doświadczalnie. Część błędów dodatkowych można wyeliminować przez odpowiednią
konstrukcję przyrządu (zastosowanie metody różnicowej, stabilizację wielkości wpływających, pomiar
wielkości wpływającej i wprowadzenie poprawki).
Błąd dynamiczny. Spowodowany nie idealnymi własnościami dynamicznymi czujnika lub przyrządu.
Występuje przy pomiarach wielkości zmiennych w czasie. Zwykle nie uwzględnia się błędu
dynamicznego w rachunku błędu. Eliminacja polega na doborze odpowiedniego czujnika.
Najtrudniejszym zadaniem w ocenie niedokładności jest specyfikacja źródeł błędu i ocena ich właściwości.
Błędy o znanych wartościach eliminuje się przez wprowadzenie poprawek. Pozostałe błędy mają charakter
przypadkowy. Błędy graniczne niedokładności określają największy rozrzut (przedział) wskazań:
ks , (4)
gdzie: s – odchylenie średnie kwadratowe (estymator odchylenia standardowego – pierwiastka
kwadratowego wariancji),
k – współczynnik.
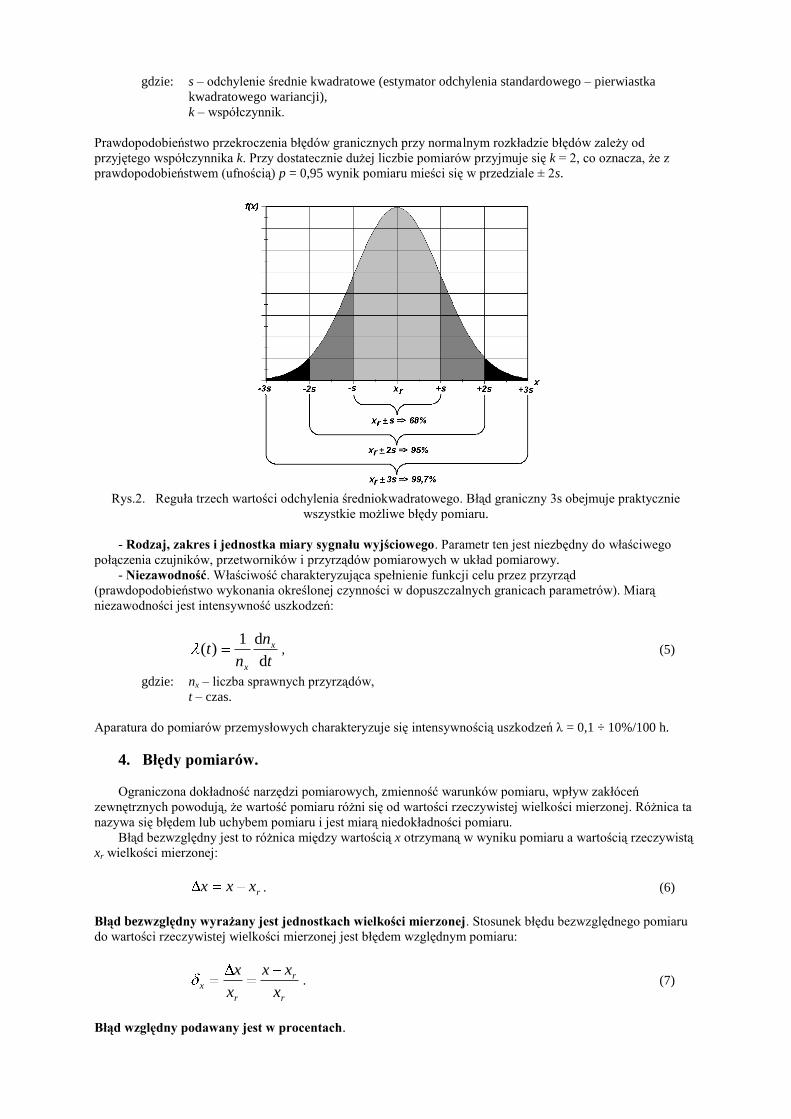
Prawdopodobieństwo przekroczenia błędów granicznych przy normalnym rozkładzie błędów zależy od
przyjętego współczynnika k. Przy dostatecznie dużej liczbie pomiarów przyjmuje się k = 2, co oznacza, że z
prawdopodobieństwem (ufnością) p = 0,95 wynik pomiaru mieści się w przedziale ± 2s.
Rys.2. Reguła trzech wartości odchylenia średniokwadratowego. Błąd graniczny 3s obejmuje praktycznie
wszystkie możliwe błędy pomiaru.
- Rodzaj, zakres i jednostka miary sygnału wyjściowego. Parametr ten jest niezbędny do właściwego
połączenia czujników, przetworników i przyrządów pomiarowych w układ pomiarowy.
- Niezawodność. Właściwość charakteryzująca spełnienie funkcji celu przez przyrząd
(prawdopodobieństwo wykonania określonej czynności w dopuszczalnych granicach parametrów). Miarą
niezawodności jest intensywność uszkodzeń:
t
n
nt x
x d
d1)( , (5)
gdzie: nx – liczba sprawnych przyrządów,
t – czas.
Aparatura do pomiarów przemysłowych charakteryzuje się intensywnością uszkodzeń λ = 0,1 ÷ 10%/100 h.
4. Błędy pomiarów.
Ograniczona dokładność narzędzi pomiarowych, zmienność warunków pomiaru, wpływ zakłóceń
zewnętrznych powodują, że wartość pomiaru różni się od wartości rzeczywistej wielkości mierzonej. Różnica ta
nazywa się błędem lub uchybem pomiaru i jest miarą niedokładności pomiaru.
Błąd bezwzględny jest to różnica między wartością x otrzymaną w wyniku pomiaru a wartością rzeczywistą
xr wielkości mierzonej:
rxxx . (6)
Błąd bezwzględny wyrażany jest jednostkach wielkości mierzonej. Stosunek błędu bezwzględnego pomiaru
do wartości rzeczywistej wielkości mierzonej jest błędem względnym pomiaru:
r
r
r
xx
xx
x
x. (7)
Błąd względny podawany jest w procentach.

Zdefiniowane powyżej błędy pomiaru (błędy rzeczywiste) są nie do określenia gdyż wartość rzeczywista
wielkości mierzonej nie jest znana. Dlatego też w technice pomiarowej używa się poprawnego błędu
bezwzględnego i względnego – wartość rzeczywistą zastępuje się wartością poprawną xp wielkości mierzonej
wyznaczoną odpowiednio dokładnie:
x
x
x
x
xxx
p
p
p
xp
pp
. (8)
Błąd bezwzględny poprawny Δxp użyty ze znakiem przeciwnym nazywa się poprawką:
xxxp pp )( . (9)
Pierwszym rezultatem pomiaru jest surowy wynik pomiaru. W wypadku wskazania pojedynczego wynik
surowy jest identyczny ze wskazaniem. W przypadku serii pomiarów tej samej wielkości, tym samym
narzędziem i tą samą metodą pomiarową wynik surowy stanowi średnią arytmetyczną wyników surowych xi
poszczególnych pomiarów:
n
i
iśr xn
x1
1. (10)
Aby otrzymać wartość poprawną wielkości mierzonej, do wartości otrzymanej w wyniku pomiaru (surowego
wyniku pomiaru) w celu wyeliminowania błędu systematycznego, należy dodać (algebraicznie) poprawkę:
pxxp lub pxx śrp . (11)
W praktyce miarą niedokładności pomiaru są graniczne błędy pomiaru Δxg określane jako najmniejszy
przedział wokół zmierzonej wartości x wewnątrz którego, z określonym prawdopodobieństwem P znajduje się
wartość rzeczywista xr:
grg xxxxx . (12)
Wynikiem pomiaru są dwie wartości: wartość zmierzona x i błąd graniczny Δxg. Zgodnie z (4) błąd graniczny
wyznaczony z prawdopodobieństwem (ufnością) P = 0,95 wynosi 2s, co oznacza, że wynik pomiaru mieści się
w przedziale ± 2s.
4.1 Błędy systematyczne.
Błędami systematycznymi (Rys.3b.) nazywa się te błędy, które przy wielu pomiarach tej samej wielkości
mierzonej, wykonywanych w tych samych warunkach pozostają stałe zarówno, co do wartości bezwzględnej jak
i znak, lub zmieniają się według określonego prawa wraz ze zmiana warunków zewnętrznych.
Rys.3. Graficzne przybliżenie błędów pomiaru.

Błędy systematyczne dzielimy na:
- błąd metody (sposób pobierania informacji o wielkości mierzonej, właściwości narzędzia pomiarowego,
nieścisłość metody opracowania wyniku),
- błąd wzorcowania (niedoskonałość wzorca, błąd aproksymacji, pierwotnej charakterystyki, zmiana
właściwości narzędzi od chwili wzorcowania do chwili użycia),
- błędy dodatkowe (zmiany właściwości narzędzi pomiarowych w wyniku zmiany warunków pomiaru).
Błędy systematyczne można całkowicie lub częściowo wyeliminować za pomocą innej, bardziej odpowiedniej
metody pomiarowej, lub za pomocą poprawek, które można wyznaczyć teoretycznie lub doświadczalnie.
Cztery sposoby usuwania błędów systematycznych
Eliminacja Korekcja
Likwidacja źródła błędu Kompensacja błędu Zmiana przyczyny błędu
i pomiar wielokrotny
Pomiar przyczyny błędu i
wprowadzenie poprawki
Przykład
Rozpatrzmy pomiar długości danego obiektu. Temperatura ma wyjątkowo duży wpływ na dokładność
pomiaru długości. Jako temperaturę odniesienia przyjmuje się temperaturę 20oC i wyniki pomiarów powinny
być podawane dla obiektów o tej temperaturze. Wydłużenie lub skrócenie Δl pręta o początkowej długości l i
temperaturze t0 dla nowej temperatury t wyznacza się z zależności:
)( 0ttll , (13)
gdzie: α – temperaturowy współczynnik liniowej rozszerzalności cieplnej materiału. Dla stali wynosi
on (11,5 ± 2)10-6
[1/oC], dla ceramiki Zerodur wynosi on (0 ± 0,05)10
-6 [1/
oC].
Błąd systematyczny temperaturowy wynosi:
mmttl nppt )]C20(-C)20([ o
n
o. (14)
gdzie: αt – współczynnik rozszerzalności cieplnej obiektu,
tp – temperatura obiektu,
αn – współczynnik rozszerzalności cieplnej narzędzia,
tn – temperatura narzędzia.
Poprawka wynosi:
ttp . (15)
Z powyższego równania wynika, że na błąd systematyczny temperaturowy ma wpływ różnica temperatur oraz
różnica współczynnika rozszerzalności cieplnej obiektu i narzędzia pomiarowego gdyż po przekształceniach
otrzymujemy:
mmtttl nppnpt )](C)20)([( p
o. (16)
Likwidacja źródła błędu polegać będzie na utrzymaniu temperatury narzędzia pomiarowego i obiektu równej
20oC. Kompensacja błędu polegać będzie na użyciu przyrządu o tym samym współczynniku rozszerzalności
cieplnej przy utrzymaniu jednakowej temperatury przyrządu i obiektu. Korekcja będzie polegała na obliczeniu i
wprowadzeniu poprawki.
4.2 Błędy przypadkowe.
Po odjęciu od wyników pomiarów błędu systematycznego pozostają błędy przypadkowe (Rys.3a.). Wynik
pomiaru obarczony błędem przypadkowym lub same błędy przypadkowe traktujemy jako zmienne losowe
przyjmujące swoje wartości z określonym prawdopodobieństwem.
W wyniku pomiaru zmienna losowa przyjmuje tylko jedną wartość spośród wszystkich możliwych.
Rozkładem zmiennej losowej X nazywa się prawdopodobieństwo przyjmowania przez nią wartości x (realizacji
zmiennej losowej). W teorii błędów przypadkowych szczególne znaczenie ma rozkład normalny (Rys.4.).
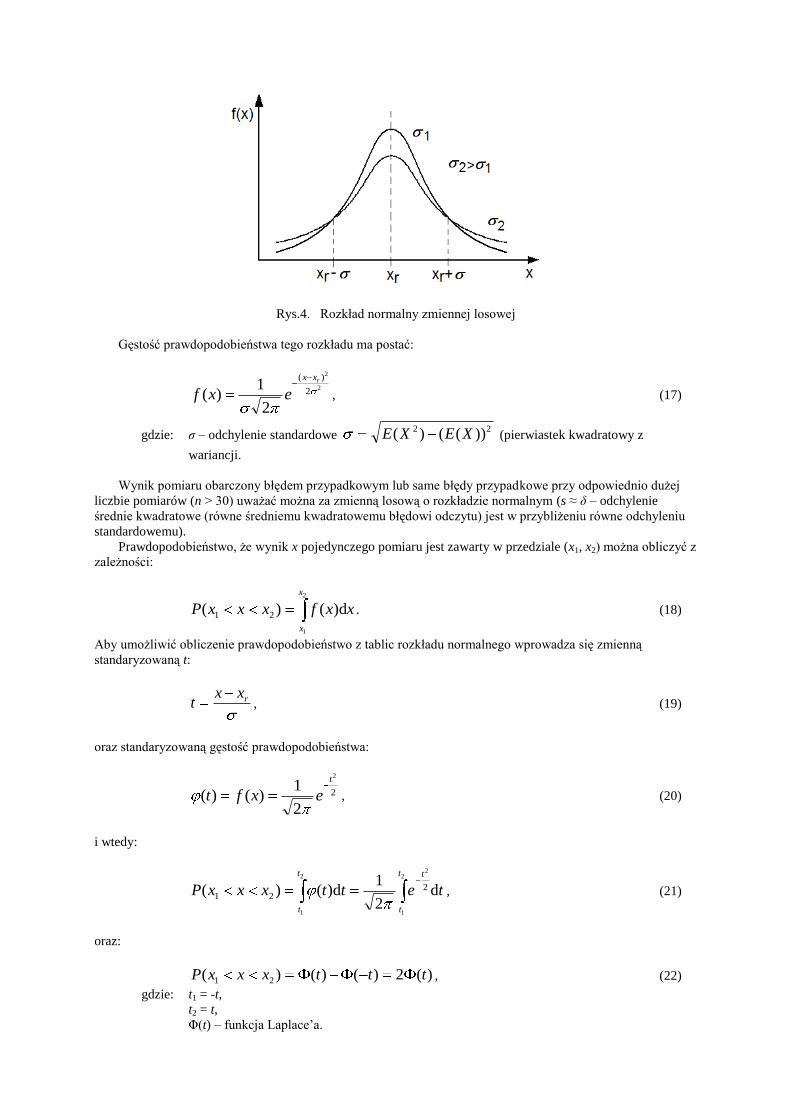
Rys.4. Rozkład normalny zmiennej losowej
Gęstość prawdopodobieństwa tego rozkładu ma postać:
2
2
2
)(
2
1)(
rxx
exf , (17)
gdzie: ζ – odchylenie standardowe 22 ))(()( XEXE (pierwiastek kwadratowy z
wariancji.
Wynik pomiaru obarczony błędem przypadkowym lub same błędy przypadkowe przy odpowiednio dużej
liczbie pomiarów (n > 30) uważać można za zmienną losową o rozkładzie normalnym (s ≈ δ – odchylenie
średnie kwadratowe (równe średniemu kwadratowemu błędowi odczytu) jest w przybliżeniu równe odchyleniu
standardowemu).
Prawdopodobieństwo, że wynik x pojedynczego pomiaru jest zawarty w przedziale (x1, x2) można obliczyć z
zależności:
2
1
d)()( 21
x
x
xxfxxxP . (18)
Aby umożliwić obliczenie prawdopodobieństwo z tablic rozkładu normalnego wprowadza się zmienną
standaryzowaną t:
rxx
t , (19)
oraz standaryzowaną gęstość prawdopodobieństwa:
2
2
2
1)()(
t
exft , (20)
i wtedy:
tettxxxP
t
t
tt
t
d2
1d)()(
2
1
22
1
221 , (21)
oraz:
)(2)()()( 21 tttxxxP , (22)
gdzie: t1 = -t,
t2 = t,
Φ(t) – funkcja Laplace’a.

Wartość odchylenia średniego kwadratowego dla liczby pomiarów n > 30 można obliczyć z zależności:
11
)(1
2'
1
2
nn
xx
s
n
i
i
n
i
śri
, (23)
gdzie: Δ' = xi – xśr – błąd pozorny.
Prawdopodobieństwo, że wynik pojedynczego pomiaru danej serii będzie zawarty w przedziale
(xśr – ts < x < xśr + ts) wynosi:
)(2)( ttsxxtsxP śrśr . (24)
Średnia arytmetyczna serii pomiarów jednakowo dokładnych jest też zmienną losową, bo powtarzając
kilkakrotnie taka serię (w niezmienionych warunkach) otrzymuje się za każdym razem inną wartość średnią.
Można, więc mówić o odchyleniu średnim kwadratowym średniej arytmetycznej, przy czym błąd średniej
wartości dla n pomiarów zgodnie z teorią prawdopodobieństwa jest n1/2
razy mniejszy od odchylenia
standardowego:
)1(
'1
2
nnn
ss
n
i
i
p . (25)
Odchylenie średnie kwadratowe średniej arytmetycznej charakteryzuje dokładność danej serii pomiarów i
pozwala określić prawdopodobieństwo, z jakim wartość rzeczywista xr wielkości mierzonej będzie zawarta w
przedziale (xśr – tsp < x < xśr + tsp). Przedział ten nosi nazwę przedziału ufności:
)(2)( ttsxxtsxP pśrpśr , (26)
natomiast prawdopodobieństwo odpowiadające temu przedziałowi nosi nazwę poziomu ufności, a wartość:
1 , (27)
nosi nazwę poziomu istotności.
W przypadku pomiarów o małej liczebności korzystniej jest stosować rozkład Studenta (Gosseta). Krzywa
gęstości prawdopodobieństwa tego rozkładu jest podobna do krzywej rozkładu normalnego, lecz jest szersza i
bardziej spłaszczona.
4.3 Metody obliczania błędów przy pomiarach pośrednich.
W praktyce znacznie częściej wykonuje się pomiary pośrednie (z uwagi na stosowanie różnego rodzaju
czujników przetwarzających wielkość mierzoną w inną wielkość fizyczną). Niech wielkość y będzie mierzona za
pomocą wielkości pomocniczych A, B, C,… Z:
),...,,( ZCBAfy . (28)
Upraszczając przyjmujemy, że wartości wielkości pomocniczych B, C,… Z zostały określone przed pomiarem w
sposób bezbłędny i nie ulegają zmianie podczas pomiaru. Pomiar pośredni sprowadza się do zmierzenia
wielkości A. Podczas pomiaru wielkość A została określona błędnie jako A + ΔA. Wtedy wartość wielkości y
obliczamy za pomocą zależności funkcyjnej:
),...,,( ZCBAAfyy . (30)
Błąd bezwzględny Δy, z jakim określono wartość wielkości y stanowi różnicę między wartością otrzymaną z
pomiaru a wartością rzeczywistą tej wielkości:
),...,,(),...,,()( ZCBAfZCBAAfyyyy . (31)

Błąd względny δy pomiaru wielkości y wynosi:
),...,,(
),...,,(),...,,(
ZCBAf
ZCBAfZCBAAf
y
yy . (32)
Jeżeli błędy popełniono również przy określaniu wartości innych wielkości pomocniczych to błąd bezwzględny
oblicza się z zależności:
),...,,(),...,,()( ZCBAfZZCCBBAAfyyyy , (33)
a błąd względny z zależności:
),...,,(
),...,,(),...,,(
ZCBAf
ZCBAfZZCCBBAAf
y
yy . (34)
Przykład
Pomiar pośredni prądu I płynącego przez opornik R poprzez pomiar napięcia na oporniku. Zależność
pomiędzy wielkością mierzoną I a wielkościami pomocniczymi U i R jest następująca:
R
URUfI ),( . (35)
Jeśli przy pomiarze napięcia popełniono błąd +ΔU, a przy określeniu wartości rezystancji błąd +ΔR to
wartość prądu obliczona na podstawie podanej zależności wynosi:
RR
UURRUUfII ),( , (36)
a błąd względny:
R
RU
I
R
RR
R
U
U
R
UR
U
RR
UU
RUf
RUfRRUUf
11
),(
),(),(
. (36)
Obliczanie błędów metoda przyrostów może być bardzo pracochłonne. Wtedy najlepiej stosować metodę
uproszczoną – metodę różniczki zupełnej. Metoda ta daje wyniki zbliżone w przypadku, gdy błędy określenia
wartości wielkości pomocniczych są rzędu kilku procent. Zależność (30) przy założeniu ciągłości funkcji można
rozwinąć w szereg:
...),...,,("!2
)(),...,,('
!1
),...,,(),...,,(
2
ZCBAfA
ZCBAfA
ZCBAfZCBAAfyy
. (37)
Przy małych wartościach ΔA można zaniedbać wyrazy zawierające ΔA w wyższych potęgach i wtedy:
A
yAyZCBAf
AZCBAfyy ),...,,('
!1),...,,( . (38)
Błąd bezwzględny wynosi:
AA
yy , (39)

a błąd względny:
Ay
y
A
A
y
y
A
A
y
y
y, (40)
gdyż:
A
AAA AA . (41)
W przypadku, gdy kilka wielkości pomocniczych określonych zostało z błędami korzystamy z rozwinięcia
w szereg Taylora dla funkcji kilku zmiennych. Stosując powyższe uproszczenie otrzymujemy:
...bAyy
B
B
y
y
A
A
y
Przykład
Energię wydzieloną w oporniku o rezystancji R przez prąd stały I w czasie t zmierzono posługując się
amperomierzem i zegarem. Źródłem błędu były:
- błąd pomiaru prądu amperomierzem – δI = 2%,
- błąd określenia rezystancji opornika – δR = 1%,
- błąd pomiaru czasu – δt = 0,5%.
Energia wydzielona w oporniku wynosi:
tRIW 2, (42)
stąd:
)1()1)(1(
)())((
)())((
22
2
2
tIR
tIR
tRI
ttIIRR
ttIIRRWW
. (43)
Błąd bezwzględny wynosi:
1)1()1)(1(
)1()1)(1(
2
2
222
tIR
tIRW
tRI
tRItRI
W
W
. (44)
Po podstawieniu otrzymujemy: δW = 0,05606. Przy obliczaniu względnego błędu metodą różniczki
zupełnej otrzymuje się:
tIRtIRwW
t
t
W
W
I
I
W
W
R
R
W2 = 0,055, (45)
a więc wynik zbliżony. Jeżeli zależność funkcjonalna między wielkością mierzoną a wielkościami
pomocniczymi jest ilorazem lub iloczynem to obliczenie błędu metodą uproszczoną można ułatwić
stosując logarytmowanie przed różniczkowaniem. Po zlogarytmowaniu (42) otrzymujemy:
tIRW lnln2lnln , (46)
a po zróżniczkowaniu:
t
t
I
I
R
R
W
W dd2
dd. (47)

Ponieważ:
WW
W
W
Wd, itp., (48)
zatem:
tIRw 2 . (49)
Gdy nie znamy konkretnych błędów wielkości pomocniczych możemy posłużyć się tolerancjami. Wtedy
oblicza się największa możliwą wartość błędu pomiaru pośredniego – błąd graniczny (w tym wypadku
przyjmuje się, że wszystkie błędy składowe maja ten sam znak):
...BAgyy
B
B
y
y
A
A
y (50)
Ponieważ wystąpienie błędu granicznego jest mało prawdopodobne, zastępuje się go błędem średnim
kwadratowym:
...2
2
2
2
BAsyy
B
B
y
y
A
A
y (51)
lepiej charakteryzującym niedokładność pomiaru pośredniego.
5. Opracowanie wyników pomiaru.
Analiza regresji – kryterium najmniejszej sumy kwadratów.
Analiza regresji umożliwia wyznaczenie zależności funkcyjnej miedzy czynnikiem wynikowym y (wyjście), a
czynnikami badanymi x1, x2,… xn (wejście) przy założeniu, że znany jest charakter tej zależności (model
matematyczny). Model zależności pomiędzy czynnikiem wynikowym a czynnikami badanymi przedstawiony
został na Rys.5.
Rys.5. Model zależności pomiędzy czynnikiem wynikowym a czynnikami badanymi.
Rys.6. Kryterium dopasowania modelu do wyników eksperymentu.
Na podstawie eksperymentu wyznacza się dla pewnych układów wartości czynników badanych
odpowiadające im wartości czynnika wynikowego – obarczonego błędami z. Wyznaczając nieznane parametry
modelu zwane współczynnikami regresji jako kryterium dopasowania modelu do wyników eksperymentu
przyjmuje się często sumę kwadratów S różnic wartości wyjść obiektu i modelu (Rys.6.):
N
i
ii yyS1
2)ˆ( . (52)
Regresja. Regresja jest miarą wielkości zmiany wielkości fizycznej X pod wpływem zmiany drugiej wielkości
fizycznej Y jeżeli zmiany te związane są ze sobą zależnością.
- Regresja liniowa. Regresję liniową stosujemy w sytuacji, gdy zmierzone wartości xn i yn, n = 1, 2,... N
(obarczone błędami przypadkowymi) dwóch różnych wielkości fizycznych X i Y związane są liniową
zależnością (przy czym zakładamy, że zmienność cechy Y jest niezależna od zmiennej X – Rys.7):
BAxy . (53)
Rys.7. Wartość oczekiwana zmiennej losowej Y jako liniowa funkcja zmiennej X.
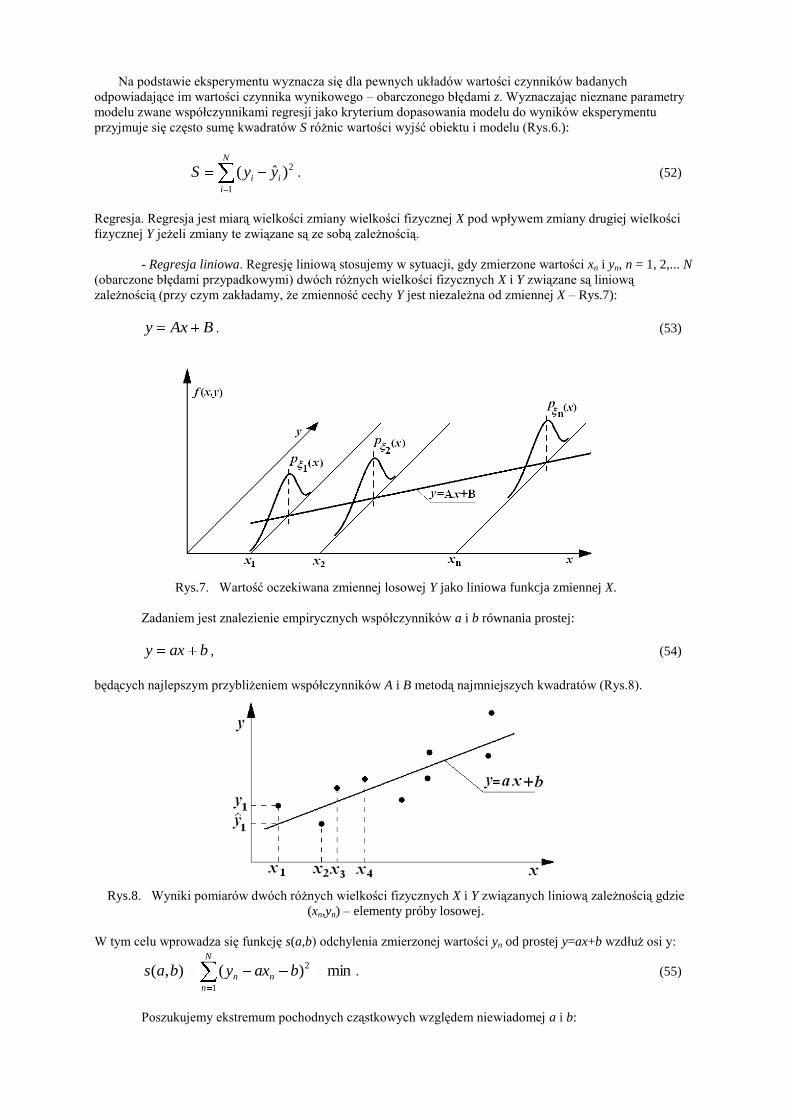
Zadaniem jest znalezienie empirycznych współczynników a i b równania prostej:
baxy , (54)
będących najlepszym przybliżeniem współczynników A i B metodą najmniejszych kwadratów (Rys.8).
Rys.8. Wyniki pomiarów dwóch różnych wielkości fizycznych X i Y związanych liniową zależnością gdzie
(xn,yn) – elementy próby losowej.
W tym celu wprowadza się funkcję s(a,b) odchylenia zmierzonej wartości yn od prostej y=ax+b wzdłuż osi y:
min)(),(1
2N
n
nn baxybas . (55)
Poszukujemy ekstremum pochodnych cząstkowych względem niewiadomej a i b:

N
n
nnn
N
n
nn
axbyxa
bas
axbyb
bas
1
1
)(2),(
)(2),(
(56)
przyrównując je do zera. W wyniku rozwiązania układu równań otrzymujemy:
xayb
xx
xxyy
aN
n
n
N
n
nn
,
)(
))((
1
2
1 . (57)
Odchylenie od wartości średniej można przedstawić w sposób następujący:
)ˆ()ˆ( nnnn yyyyyy . (58)
pierwszy składnik opisuje część całkowitego odchylenia zmiennej y opisanego regresją, drugi składnik
opisuje pozostałą część odchylenia (Rys.9).
Rys.9. Interpretacja odchylenia od wartości średniej.
Po podniesieniu do kwadratu obu stron równania i przekształceniach otrzymujemy analogiczną równość dla sum
kwadratów:
N
n
nn
N
n
n
N
n
n yyyyyy1
2
1
2
1
2 )ˆ()ˆ()( , (59)
którą wykorzystujemy do wyznaczenia empirycznego współczynnika regresji:
N
n
N
n
nn
N
n
N
n
nn
N
n
n
N
n
n
N
n
nn
yyNxxN
yxyxN
r
1
2
1
2
1
2
1
2
111 , (60)
w którym sumę odchyleń opisanych regresją odnosimy do iloczynu średnich odchyleń standardowych
zmierzonych wartości xn i yn,. Empiryczny współczynnik regresji stanowi kryterium, w jaki sposób punkty
pomiarowe xn i yn potwierdzają liniowa zależność wielkości fizycznych X i Y (miarę dopasowania prostej
regresji). Jego wartość zmienia się w granicach –1≤ r ≤ +1. Gdy |r| = 1 dopasowanie jest idealne, wszystkie
punkty pomiarowe leżą na prostej. Gdy r = 0 to zależność liniowa pomiędzy wielkościami fizycznymi X i Y nie
istnieje. Mała wartość współczynnika r może wskazywać na zbyt małą liczbę pomiarów lub inną niż założono
współzależność między wielkościami xn i yn. Graniczne wartości współczynnika r w zależności od liczby
pomiarów N, od których można wnioskować o istnieniu założonej współzależności przedstawione zostały na
Rys.10.
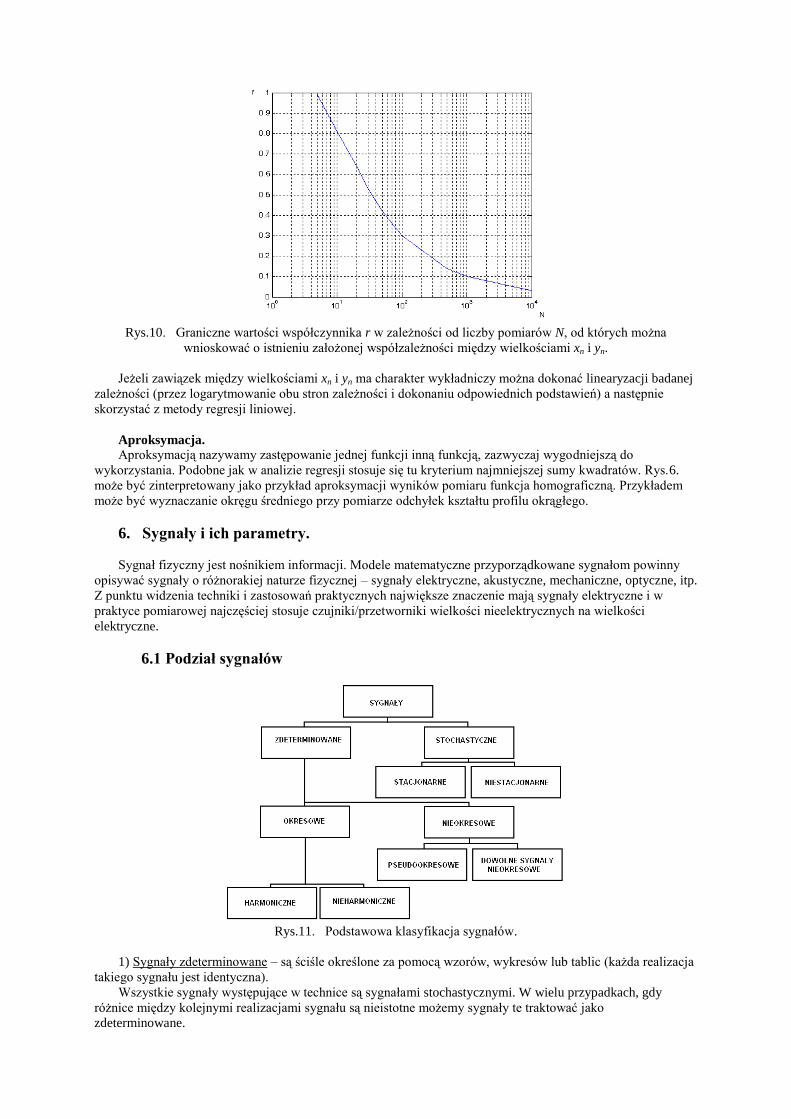
Rys.10. Graniczne wartości współczynnika r w zależności od liczby pomiarów N, od których można
wnioskować o istnieniu założonej współzależności między wielkościami xn i yn.
Jeżeli zawiązek między wielkościami xn i yn ma charakter wykładniczy można dokonać linearyzacji badanej
zależności (przez logarytmowanie obu stron zależności i dokonaniu odpowiednich podstawień) a następnie
skorzystać z metody regresji liniowej.
Aproksymacja.
Aproksymacją nazywamy zastępowanie jednej funkcji inną funkcją, zazwyczaj wygodniejszą do
wykorzystania. Podobne jak w analizie regresji stosuje się tu kryterium najmniejszej sumy kwadratów. Rys.6.
może być zinterpretowany jako przykład aproksymacji wyników pomiaru funkcja homograficzną. Przykładem
może być wyznaczanie okręgu średniego przy pomiarze odchyłek kształtu profilu okrągłego.
6. Sygnały i ich parametry.
Sygnał fizyczny jest nośnikiem informacji. Modele matematyczne przyporządkowane sygnałom powinny
opisywać sygnały o różnorakiej naturze fizycznej – sygnały elektryczne, akustyczne, mechaniczne, optyczne, itp.
Z punktu widzenia techniki i zastosowań praktycznych największe znaczenie mają sygnały elektryczne i w
praktyce pomiarowej najczęściej stosuje czujniki/przetworniki wielkości nieelektrycznych na wielkości
elektryczne.
6.1 Podział sygnałów
Rys.11. Podstawowa klasyfikacja sygnałów.
1) Sygnały zdeterminowane – są ściśle określone za pomocą wzorów, wykresów lub tablic (każda realizacja
takiego sygnału jest identyczna).
Wszystkie sygnały występujące w technice są sygnałami stochastycznymi. W wielu przypadkach, gdy
różnice między kolejnymi realizacjami sygnału są nieistotne możemy sygnały te traktować jako
zdeterminowane.

2) Sygnały okresowe – są to sygnały powtarzające się z okresem T: x(t)=x(t+T). Funkcja gęstości widma
przebiegów okresowych jest funkcją prążkową.
3) Sygnały okresowe harmoniczne – są to sygnały opisane przebiegiem sinusoidalnym: x(t)=X0sin(ωt+θ).
4) Nieharmoniczne sygnały okresowe – sygnały te opisujemy za pomocą następujących miar:
xp – wartość szczytowa – największe odchylenie od położenia zerowego,
xpp – wartość międzyszczytowa – różnica między maksymalnym i minimalnym wychyleniem,
xśr – wartość średnia –
T
ttxT
0
d)(1
, (61)
xsk –średnia wartość skuteczna –
T
ttxT
0
2 d)(1
, (62)
współczynnik szczytu (ang. – crest factor) –
sk
p
x
x. (63)
Rys.12. Miary nieharmonicznego sygnału okresowego.
Ważnym przypadkiem jest sumowanie sygnałów harmonicznych o zbliżonych okresach T1 i T2. Występuje
wtedy zjawisko zdudnienia – maksymalne wychylenie sygnału sumarycznego okresowo rośnie i maleje
(Rys.13.). Jeżeli amplitudy obu sygnałów są także zbliżone to wychylenie zmienia się od 0 do 2X0 z okresem
21
111
TTT.
Rys.13. Efekt zdudnienia.
5) Sygnały nieokresowe – dla tego typu sygnału nie istnieje liczba T spełniająca zależność: x(t)=x(t+T).
Szczególne znaczenie w analizie drgań mają trzy realizacje sygnałów nieokresowych:
a) skok –
00
0
dla
dla0)(
ttx
tttx , lub )()()( 00 tttxtx , (64)
gdzie ζ – funkcja Heaviside’a;

b) impuls – sygnał jest równy 0 z wyjątkiem chwili t0, w której przyjmuje wartość nieskończenie dużą, przy
czym pole pod krzywą ttx d)( :
0
0
dla
dla0)(
tt
tttx , lub )()( 0tttx , (65)
gdzie: δ – funkcja Diraca. W praktyce sygnał impulsowy służy do modelowania uderzeń.
c) sygnał pseudoharmoniczny – sygnał harmoniczny o zmiennej w czasie amplitudzie X0 = x0(t), pulsacji
ω = ω(t) i fazie θ = θ(t). Stąd (argument funkcji sinus należy przy zmiennej pulsacji obliczać przez całkowanie):
t
x ttxx0
0 )(d)(sin)( , (66)
lub w wypadku uzależnienia amplitudy i fazy od częstości:
t
xxx0
0 )(d)(sin)( , (67)
gdzie: ω = ω(η) – jest funkcją czasu.
Dowolny sygnał nieokresowy możemy przedstawić w postaci:
0
0 d)](sin[)()( xttx , (68)
gdzie: 0( ) – jest gęstością widma amplitudowego i ma wymiar sygnału x(t) podzielonego przez
wymiar [rad/sek.]. W odróżnieniu od widma amplitudowego sygnałów okresowych funkcja
gęstości widmowej jest ciągła.
Przyjęcie skończonego czasu badania sygnału jest równoważne z założeniem, że sygnał jest sygnałem
okresowym o okresie T=T0 (T0 – czas pomiaru), widmo amplitudowe staje się funkcją prążkowaną, a odległość
między prążkami wynosi = 2 / T0.
6) Sygnały stochastyczne – sygnały o charakterze losowym, których każda realizacja jest inna od pozostałej,
mające pewne charakterystyczne cechy pozwalające je odróżnić od siebie (ys.14.):
a) wartość średnia – będącą funkcja zdeterminowaną. Jej wartość wyznaczamy obliczając wartość średnią z
wartości sygnałów stochastycznych w poszczególnych przebiegach dla danej chwili t:
l
i
iśr txl
txtx1
)(1
)]([E)( , (69)
gdzie: E – operacja uśredniania,
l – liczba przebiegów sygnału stochastycznego.
Sygnałem scentrowanym nazywamy sygnał, od którego odjęta została wartość średnia:
)()()(0 txtxtx śr . (70)
Wartość średnia sygnału scentrowanego jest równa zero.
b) wariancja sygnału stochastycznego – będąca funkcją zdeterminowaną:
l
i
ix txl
txt1
2
0
2
0
2 )(1
)]([E)( , (71)

gdzie: x0i(t) – i-ty przebieg scentrowanego sygnału stochastycznego.
Obok pojęcia wariancji stosuje się pojęcie dyspersji (średnie odchylenie standardowe):
)]([E)( 2
0 txtx . (72)
Wariancja i dyspersja określają liczbowo wielkość średniego odchylenia od wartości średniej badanego sygnału
stochastycznego.
Rys.14. Analiza procesów losowych: x1(t),… realizacje czasowe procesu losowego, xt1,… zmienne losowe w
chwilach czasowych t1,…
c) funkcja korelacji:
l
i
iix ttxtxl
ttxtxEt1
000 )()(1
)]()([)(0
, (73)
gdzie: t – czas pomiędzy dwoma pomiarami sygnału x(t). Funkcje korelacji wyznaczamy dla
danego czasu t.
Gdy t –> 0 wtedy: )()0( 2 txx , co oznacza, że funkcja korelacji przyjmuje wartość wariancji. Im szybciej
funkcja korelacji dąży do zera, tym sygnał stochastyczny jest szybciej zmienny.
d) funkcja gęstości widmowej x( ) jest transformatą Fouriera funkcji korelacji:
0
)(d)(2
1)( tet tj
xx , (74)
natomiast funkcja korelacji jest transformatą odwrotną gęstości widmowej.
Stacjonarnym sygnałem stochastycznym nazywamy taki sygnał, dla którego wartość średnia i wariancja nie
zależą od czasu, a funkcja korelacji jest jednakowa dla każdej chwili t.
6.2 Cyfrowe przetwarzanie sygnałów
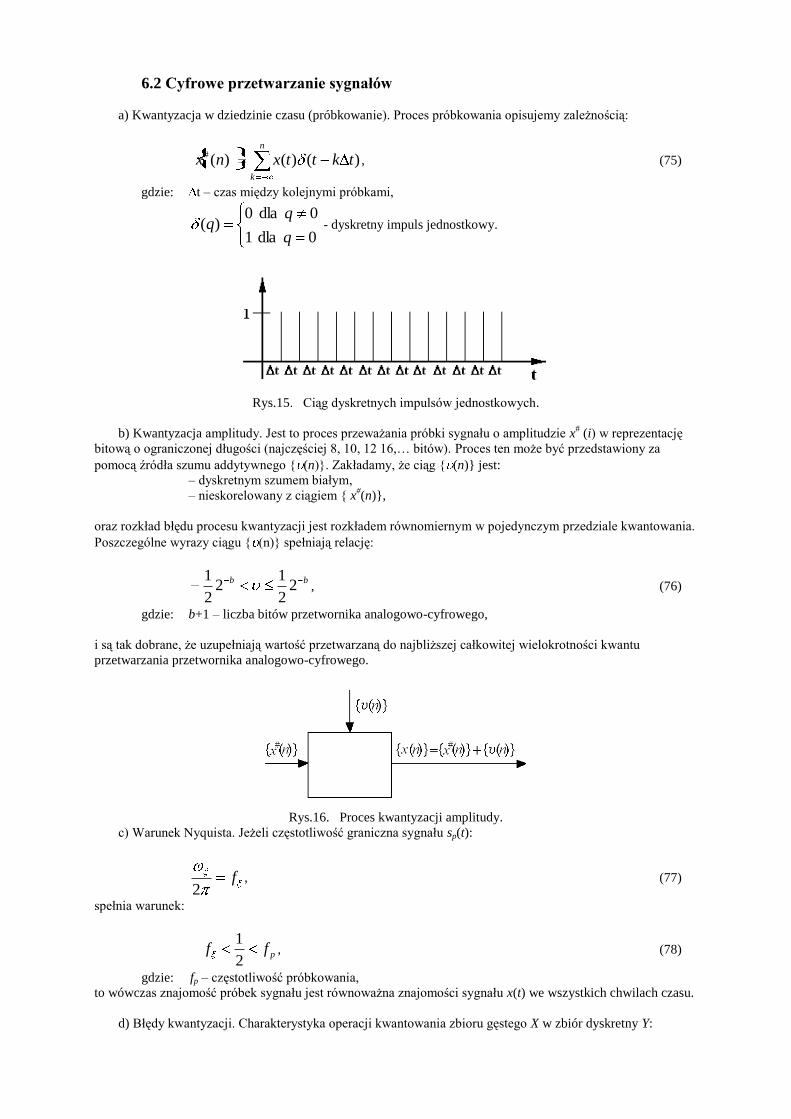
a) Kwantyzacja w dziedzinie czasu (próbkowanie). Proces próbkowania opisujemy zależnością:
n
k
tkttxnx )()()(#, (75)
gdzie: t – czas między kolejnymi próbkami,
0dla1
0dla0)(
q
qq - dyskretny impuls jednostkowy.
Rys.15. Ciąg dyskretnych impulsów jednostkowych.
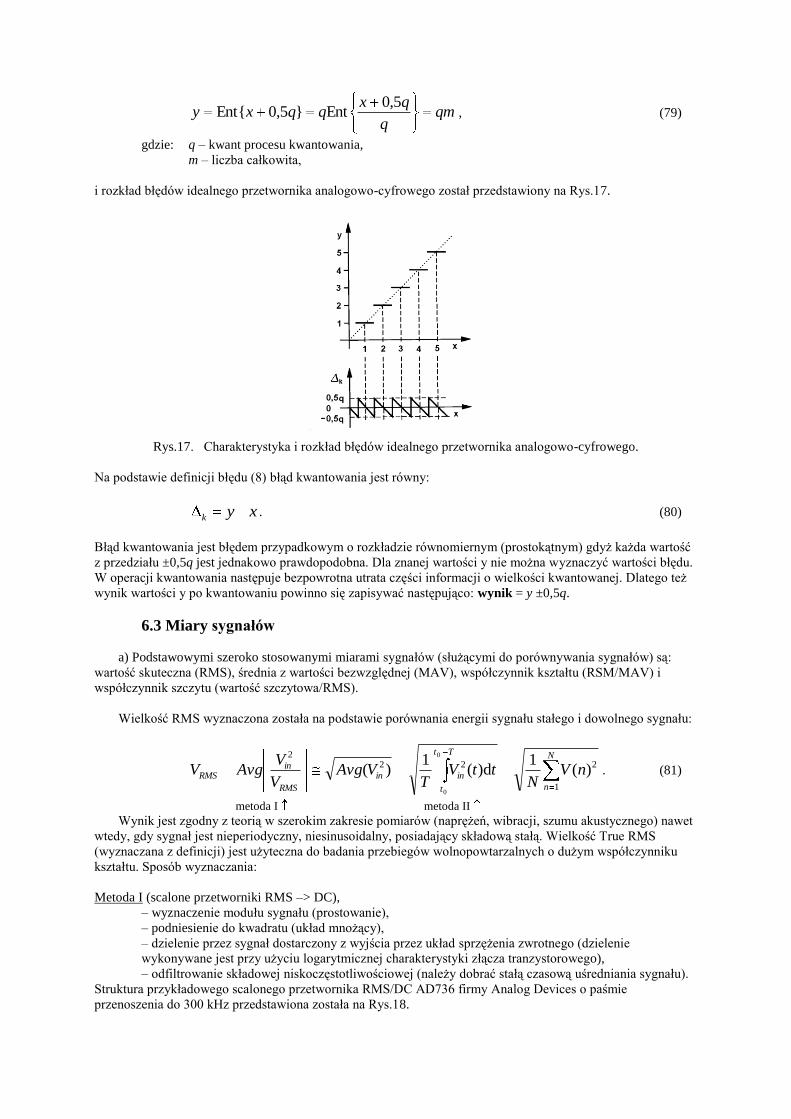
b) Kwantyzacja amplitudy. Jest to proces przeważania próbki sygnału o amplitudzie x# (i) w reprezentację
bitową o ograniczonej długości (najczęściej 8, 10, 12 16,… bitów). Proces ten może być przedstawiony za
pomocą źródła szumu addytywnego { (n)}. Zakładamy, że ciąg { (n)} jest:
– dyskretnym szumem białym,
– nieskorelowany z ciągiem { x#(n)},
oraz rozkład błędu procesu kwantyzacji jest rozkładem równomiernym w pojedynczym przedziale kwantowania.
Poszczególne wyrazy ciągu { (n)} spełniają relację:
bb 2
2
12
2
1, (76)
gdzie: b+1 – liczba bitów przetwornika analogowo-cyfrowego,
i są tak dobrane, że uzupełniają wartość przetwarzaną do najbliższej całkowitej wielokrotności kwantu
przetwarzania przetwornika analogowo-cyfrowego.
Rys.16. Proces kwantyzacji amplitudy.
c) Warunek Nyquista. Jeżeli częstotliwość graniczna sygnału sp(t):
f2
, (77)
spełnia warunek:
pff2
1, (78)
gdzie: fp – częstotliwość próbkowania,
to wówczas znajomość próbek sygnału jest równoważna znajomości sygnału x(t) we wszystkich chwilach czasu.
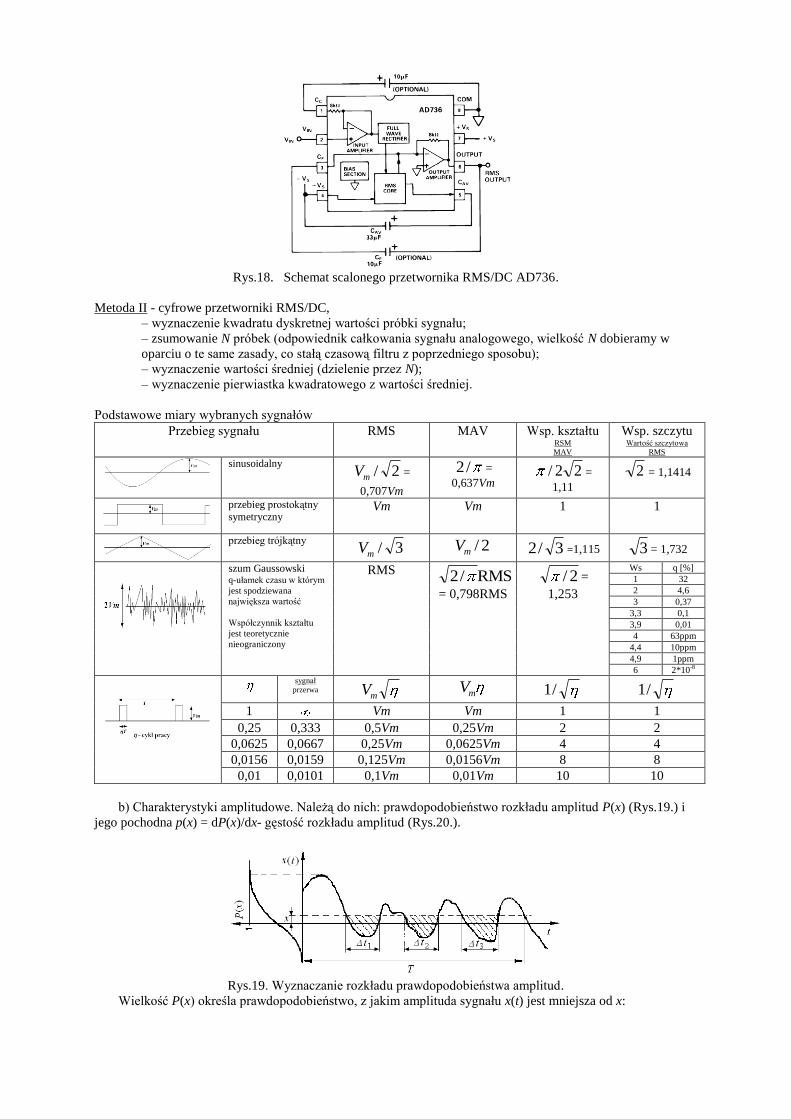
d) Błędy kwantyzacji. Charakterystyka operacji kwantowania zbioru gęstego X w zbiór dyskretny Y:
qmq
qxqqxy
5,0Ent}5,0{Ent , (79)
gdzie: q – kwant procesu kwantowania,
m – liczba całkowita,
i rozkład błędów idealnego przetwornika analogowo-cyfrowego został przedstawiony na Rys.17.
Rys.17. Charakterystyka i rozkład błędów idealnego przetwornika analogowo-cyfrowego.
Na podstawie definicji błędu (8) błąd kwantowania jest równy:
xyk. (80)
Błąd kwantowania jest błędem przypadkowym o rozkładzie równomiernym (prostokątnym) gdyż każda wartość
z przedziału ±0,5q jest jednakowo prawdopodobna. Dla znanej wartości y nie można wyznaczyć wartości błędu.
W operacji kwantowania następuje bezpowrotna utrata części informacji o wielkości kwantowanej. Dlatego też
wynik wartości y po kwantowaniu powinno się zapisywać następująco: wynik = y ±0,5q.
6.3 Miary sygnałów
a) Podstawowymi szeroko stosowanymi miarami sygnałów (służącymi do porównywania sygnałów) są:
wartość skuteczna (RMS), średnia z wartości bezwzględnej (MAV), współczynnik kształtu (RSM/MAV) i
współczynnik szczytu (wartość szczytowa/RMS).
Wielkość RMS wyznaczona została na podstawie porównania energii sygnału stałego i dowolnego sygnału:
N
n
Tt
t
inin
RMS
inRMS nV
NttV
TVAvg
V
VAvgV
1
2222
)(1
d)(1
)(0
0
. (81)
metoda I metoda II
Wynik jest zgodny z teorią w szerokim zakresie pomiarów (naprężeń, wibracji, szumu akustycznego) nawet
wtedy, gdy sygnał jest nieperiodyczny, niesinusoidalny, posiadający składową stałą. Wielkość True RMS
(wyznaczana z definicji) jest użyteczna do badania przebiegów wolnopowtarzalnych o dużym współczynniku
kształtu. Sposób wyznaczania:
Metoda I (scalone przetworniki RMS –> DC),
– wyznaczenie modułu sygnału (prostowanie),
– podniesienie do kwadratu (układ mnożący),
– dzielenie przez sygnał dostarczony z wyjścia przez układ sprzężenia zwrotnego (dzielenie
wykonywane jest przy użyciu logarytmicznej charakterystyki złącza tranzystorowego),
– odfiltrowanie składowej niskoczęstotliwościowej (należy dobrać stałą czasową uśredniania sygnału).
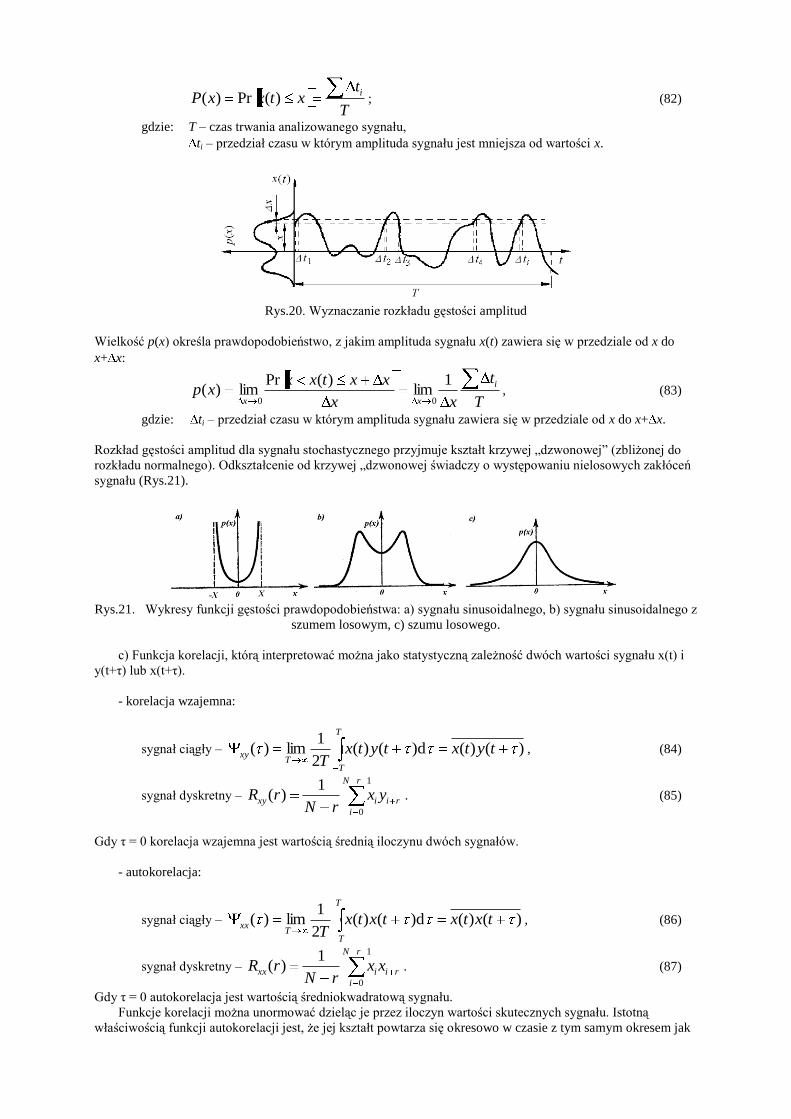
Struktura przykładowego scalonego przetwornika RMS/DC AD736 firmy Analog Devices o paśmie
przenoszenia do 300 kHz przedstawiona została na Rys.18.
Rys.18. Schemat scalonego przetwornika RMS/DC AD736.
Metoda II - cyfrowe przetworniki RMS/DC,
– wyznaczenie kwadratu dyskretnej wartości próbki sygnału;
– zsumowanie N próbek (odpowiednik całkowania sygnału analogowego, wielkość N dobieramy w
oparciu o te same zasady, co stałą czasową filtru z poprzedniego sposobu);
– wyznaczenie wartości średniej (dzielenie przez N);
– wyznaczenie pierwiastka kwadratowego z wartości średniej.
Podstawowe miary wybranych sygnałów
Przebieg sygnału RMS MAV Wsp. kształtu RSM
MAV
Wsp. szczytu Wartość szczytowa
RMS
sinusoidalny 2/mV =
0,707Vm
/2 =
0,637Vm 22/ =
1,11
2 = 1,1414
przebieg prostokątny
symetryczny Vm Vm 1 1
przebieg trójkątny 3/mV 2/mV 3/2 =1,115 3 = 1,732
szum Gaussowski q-ułamek czasu w którym
jest spodziewana
największa wartość
Współczynnik kształtu
jest teoretycznie
nieograniczony
RMS RMS/2= 0,798RMS
2/ =
1,253
Ws q [%]
1 32
2 4,6
3 0,37
3,3 0,1
3,9 0,01
4 63ppm
4,4 10ppm
4,9 1ppm
6 2*10-8
sygnał
przerwa mV mV /1 /1
1 Vm Vm 1 1
0,25 0,333 0,5Vm 0,25Vm 2 2
0,0625 0,0667 0,25Vm 0,0625Vm 4 4
0,0156 0,0159 0,125Vm 0,0156Vm 8 8
0,01 0,0101 0,1Vm 0,01Vm 10 10
b) Charakterystyki amplitudowe. Należą do nich: prawdopodobieństwo rozkładu amplitud P(x) (Rys.19.) i
jego pochodna p(x) = dP(x)/dx- gęstość rozkładu amplitud (Rys.20.).
Rys.19. Wyznaczanie rozkładu prawdopodobieństwa amplitud.
Wielkość P(x) określa prawdopodobieństwo, z jakim amplituda sygnału x(t) jest mniejsza od x:
T
txtxxP
i)(Pr)( ; (82)
gdzie: T – czas trwania analizowanego sygnału,
ti – przedział czasu w którym amplituda sygnału jest mniejsza od wartości x.
Rys.20. Wyznaczanie rozkładu gęstości amplitud
Wielkość p(x) określa prawdopodobieństwo, z jakim amplituda sygnału x(t) zawiera się w przedziale od x do
x+ x:
T
t
xx
xxtxxxp
i
xx
1lim
)(Prlim)(
00, (83)
gdzie: ti – przedział czasu w którym amplituda sygnału zawiera się w przedziale od x do x+ x.
Rozkład gęstości amplitud dla sygnału stochastycznego przyjmuje kształt krzywej „dzwonowej” (zbliżonej do
rozkładu normalnego). Odkształcenie od krzywej „dzwonowej świadczy o występowaniu nielosowych zakłóceń
sygnału (Rys.21).
Rys.21. Wykresy funkcji gęstości prawdopodobieństwa: a) sygnału sinusoidalnego, b) sygnału sinusoidalnego z
szumem losowym, c) szumu losowego.
c) Funkcja korelacji, którą interpretować można jako statystyczną zależność dwóch wartości sygnału x(t) i
y(t+η) lub x(t+η).
- korelacja wzajemna:
sygnał ciągły – )()(d)()(2
1lim)( tytxtytx
T
T
TT
xy, (84)
sygnał dyskretny –
1
0
1)(
rN
i
riixy yxrN
rR . (85)
Gdy η = 0 korelacja wzajemna jest wartością średnią iloczynu dwóch sygnałów.
- autokorelacja:
sygnał ciągły – )()(d)()(2
1lim)( txtxtxtx
T
T
TT
xx, (86)
sygnał dyskretny –
1
0
1)(
rN
i
riixx xxrN
rR . (87)
Gdy η = 0 autokorelacja jest wartością średniokwadratową sygnału.
Funkcje korelacji można unormować dzieląc je przez iloczyn wartości skutecznych sygnału. Istotną
właściwością funkcji autokorelacji jest, że jej kształt powtarza się okresowo w czasie z tym samym okresem jak

podstawowy okres analizowanego sygnału. Może, więc zostać użyta do wyznaczenia okresu podstawowego
sygnału harmonicznego z szumem losowym.
d) Rozkład harmoniczny. W wielu zagadnieniach zachodzi potrzeba zastąpienia funkcji okresowej f(x) o
okresie T w sposób dokładny lub przybliżony sumą trygonometryczną:
...2cos2sinsincos2
1)( 22110 xbxaxbxaaxfn (88)
gdzie: T
2.
Suma fn(x) jest najlepszym przybliżeniem funkcji f(x) w sensie najmniejszego błędu średniokwadratowego T
n xxfxfT
s0
22 d)()(1
, jeżeli współczynniki ak i bk są współczynnikami Fouriera danej funkcji
określonymi wzorami Eulera:
nkxxkxfxfb
nkxxkxfxfa
k
k
,...2,1,0dsin)()(2
,...2,1,0dcos)()(2
2/
0
2/
0. (89)
Znalezienie współczynników ak i bk jest zagadnieniem algebry harmonicznej: zastępujemy całki we wzorach
Eulera sumami według wzoru przybliżonego całkowania (np. wzór trapezów). Otrzymujemy wtedy wzór
Bessela dla przybliżonej analizy harmonicznej. Okres T dzielimy na 2n równych części:
nkxfynkTx kkk 2,...2,1,0dla)(,2/ ,
wtedy:
n
kmynb
nmdlan
kmyna
yna
n
k
km
n
k
km
n
k
k
12
0
12
0
12
0
0
sin
,...2,1,cos . (90)
Rys.22. Moduł transformaty Fouriera dwóch sygnałów sinusoidalnych: a) x1=sin(2 (f1/fpróbkowania)k) i b)
x2=sin(2 (f2/fpróbkowania)k) dla f1 = 2Hz i f2 = 2,5Hz spróbkowanych z częstotliwością fpróbkowania = 16 Hz. Linią
ciągłą zaznaczone jest widmo ciągłe, punktami próbki widma dyskretnego.

Z uwagi na podział okresu analizowanej funkcji na 2n części przekształcenie to nazywane jest dyskretną
transformatą Fouriera (DFT). Algorytm numeryczny minimalizujący ilość operacji niezbędnych do wyznaczenia
dyskretnej transformaty Fouriera nazwano szybką transformata Fouriera (FFT).
„Prążki” X(m) dyskretnej transformacji Fouriera „próbkują” ciągłe widmo X(2n)
(ejΩ
)/2n w zakresie
częstotliwości od 0 do fpróbkowania. Próbek widma jest dokładnie tyle samo ile próbek sygnału wejściowego, czyli
2n. Z tego też powodu interpretacja prążków dyskretnej transformaty Fouriera zależeć będzie od tego czy czas
trwania analizowanego sygnału T = t*2n jest współmierny z jego okresem. Tylko w wypadku współmierności
prążki widma będą odpowiadały rzeczywistej składowej harmonicznej gdyż analizowany jest sygnał
powtarzający się okresowo, co 2n próbek (analizujemy fragment sygnału wyciętego przez okno prostokątne).
6.3 Eliminacja szumu zakłóceń przypadkowych
Oprócz stosowania różnego rodzaju filtrów, jednym ze sposobów eliminacji szumów (a także części sygnału
niewspółmiernego z arbitralnie wybranym okresem T) jest uśrednianie synchroniczne. W celu wyeliminowania
szumu zakłóceń przypadkowych sygnał pomiarowy poddawany jest sumowaniu synchronicznemu (K-krotne
sumowanie T-okresowych partii sygnału podstawowego zawierających N elementów):
1
0
)}({1
)},({K
j
T jNnxK
Knx , (83)
gdzie: n = 1…N,
K > 1 – liczba T okresowych partii sygnału pomiarowego użytych do sumowania.
Niech ciąg {xs(n)} zawiera składowe sygnału {x(n)} o okresie T/n (n = 1, 2,… N/2). W wyniku uśredniania
w dziedzinie czasu ciągu {xs(n)} z okresem T i-ty element nowo utworzonego ciągu {xsT(n)} spełnia zależność:
1
0
)()(1
)(K
j
sssT ixjNixK
ix , (91)
gdyż kolejne T-okresowe partie ciągu {xs(n)} są identyczne. Oznaczmy przez {xa(n)} pozostałą część sygnału
{x(n)}. T-okresowe partie ciągu {xa(n)} poddawane są uśrednianiu i-ty element nowo powstałego ciągu {xaT(n)}
z uwagi na jego stochastyczny charakter spełnia zależność:
1
0
)(1
)(K
j
saaT jNixK
ix , (92)
w konsekwencji:
),(),( mKixKix TT , (93)
gdzie: m – liczba naturalna,
ε – błąd sumowania synchronicznego,
dla K dostatecznie dużego. Tak, więc składowa synchroniczna sygnału pomiarowego w wyniku uśredniania w
dziedzinie czasu nie ulega zmianie, podczas gdy składowa niesynchroniczna jest eliminowana. Uśrednianie
synchroniczne daje K-krotne polepszenie stosunku sygnału użytecznego do sygnału zakłócającego.
Rys.23. Widmo amplitudowe sygnału , którego częstotliwość zmienia się w granicach 5 – 200 Hz,
uśrednionego synchronicznie dla: a) 10, b) 20, c) 30, d) 40 okresów. Okres uśredniania wynosi T=1/50 Hz. W
wyniku operacji uśredniania pozostały tylko harmoniczne współmierne z okresem uśredniania: 5, 10, 25 i 50 Hz.
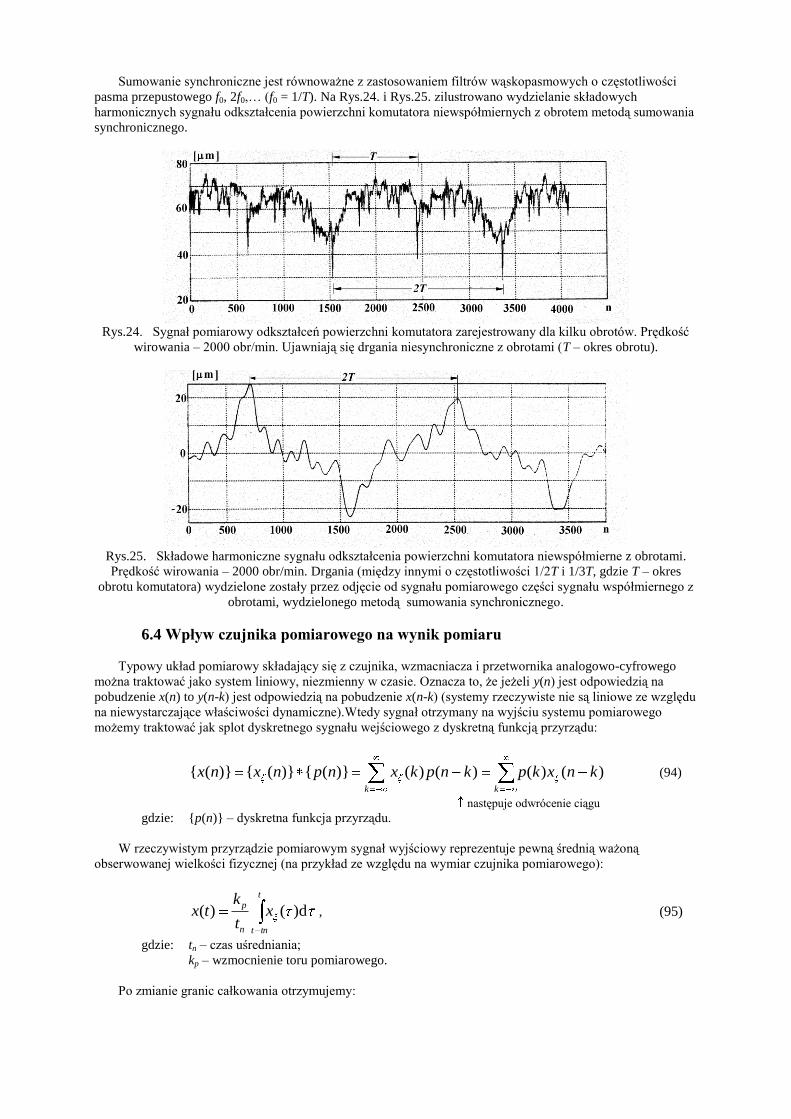
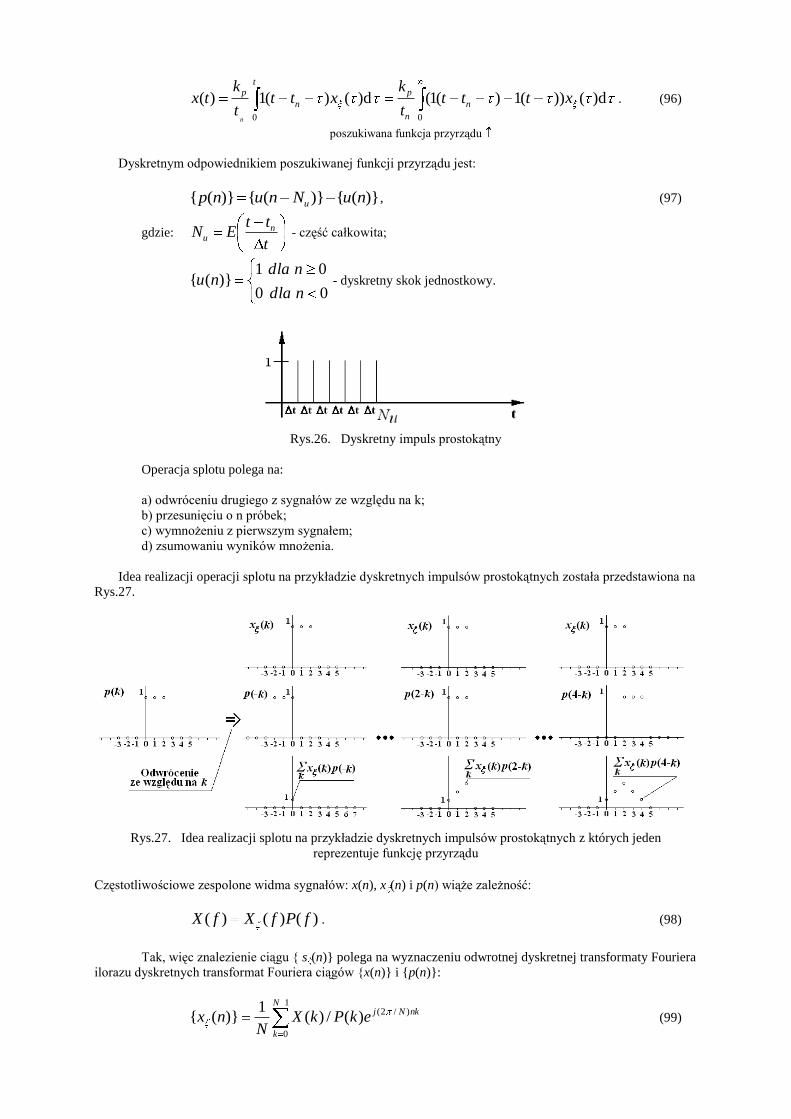
Sumowanie synchroniczne jest równoważne z zastosowaniem filtrów wąskopasmowych o częstotliwości
pasma przepustowego f0, 2f0,… (f0 = 1/T). Na Rys.24. i Rys.25. zilustrowano wydzielanie składowych
harmonicznych sygnału odkształcenia powierzchni komutatora niewspółmiernych z obrotem metodą sumowania
synchronicznego.
Rys.24. Sygnał pomiarowy odkształceń powierzchni komutatora zarejestrowany dla kilku obrotów. Prędkość
wirowania – 2000 obr/min. Ujawniają się drgania niesynchroniczne z obrotami (T – okres obrotu).
Rys.25. Składowe harmoniczne sygnału odkształcenia powierzchni komutatora niewspółmierne z obrotami.
Prędkość wirowania – 2000 obr/min. Drgania (między innymi o częstotliwości 1/2T i 1/3T, gdzie T – okres
obrotu komutatora) wydzielone zostały przez odjęcie od sygnału pomiarowego części sygnału współmiernego z
obrotami, wydzielonego metodą sumowania synchronicznego.
6.4 Wpływ czujnika pomiarowego na wynik pomiaru
Typowy układ pomiarowy składający się z czujnika, wzmacniacza i przetwornika analogowo-cyfrowego
można traktować jako system liniowy, niezmienny w czasie. Oznacza to, że jeżeli y(n) jest odpowiedzią na
pobudzenie x(n) to y(n-k) jest odpowiedzią na pobudzenie x(n-k) (systemy rzeczywiste nie są liniowe ze względu
na niewystarczające właściwości dynamiczne).Wtedy sygnał otrzymany na wyjściu systemu pomiarowego
możemy traktować jak splot dyskretnego sygnału wejściowego z dyskretną funkcją przyrządu:
k k
knxkpknpkxnpnxnx )()()()()}({)}({)}({ (94)
następuje odwrócenie ciągu
gdzie: {p(n)} – dyskretna funkcja przyrządu.
W rzeczywistym przyrządzie pomiarowym sygnał wyjściowy reprezentuje pewną średnią ważoną
obserwowanej wielkości fizycznej (na przykład ze względu na wymiar czujnika pomiarowego):
t
tntn
px
t
ktx d)()( , (95)
gdzie: tn – czas uśredniania;
kp – wzmocnienie toru pomiarowego.
Po zmianie granic całkowania otrzymujemy:
00
d)())(1)(1(d)()(1)( xtttt
kxtt
t
ktx n
n
pt
n
p
n
. (96)
poszukiwana funkcja przyrządu
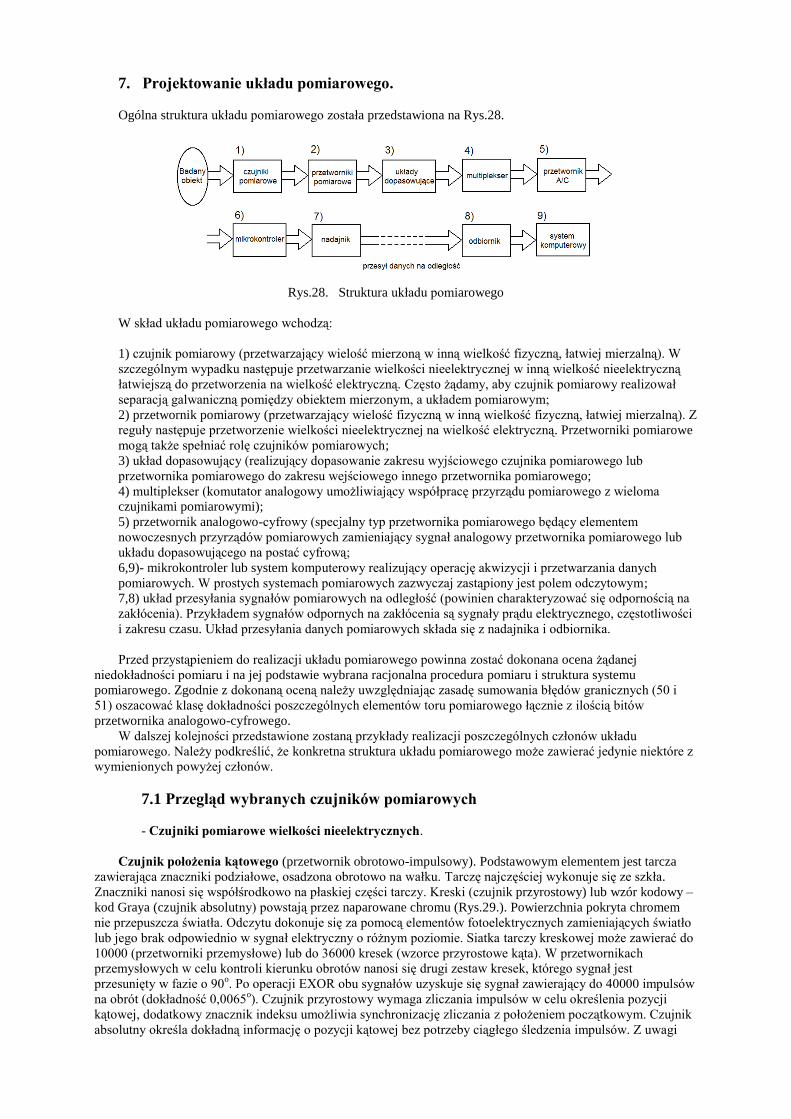
Dyskretnym odpowiednikiem poszukiwanej funkcji przyrządu jest:
)}({)}({)}({ nuNnunp u, (97)
gdzie: t
ttEN n
u - część całkowita;
00
01)}({
ndla
ndlanu - dyskretny skok jednostkowy.
Rys.26. Dyskretny impuls prostokątny
Operacja splotu polega na:
a) odwróceniu drugiego z sygnałów ze względu na k;
b) przesunięciu o n próbek;
c) wymnożeniu z pierwszym sygnałem;
d) zsumowaniu wyników mnożenia.
Idea realizacji operacji splotu na przykładzie dyskretnych impulsów prostokątnych została przedstawiona na
Rys.27.
Rys.27. Idea realizacji splotu na przykładzie dyskretnych impulsów prostokątnych z których jeden
reprezentuje funkcję przyrządu
Częstotliwościowe zespolone widma sygnałów: x(n), x (n) i p(n) wiąże zależność:
)()()( fPfXfX . (98)
Tak, więc znalezienie ciągu { s (n)} polega na wyznaczeniu odwrotnej dyskretnej transformaty Fouriera
ilorazu dyskretnych transformat Fouriera ciągów {x(n)} i {p(n)}:
1
0
)/2()(/)(1
)}({N
k
nkNjekPkXN
nx (99)
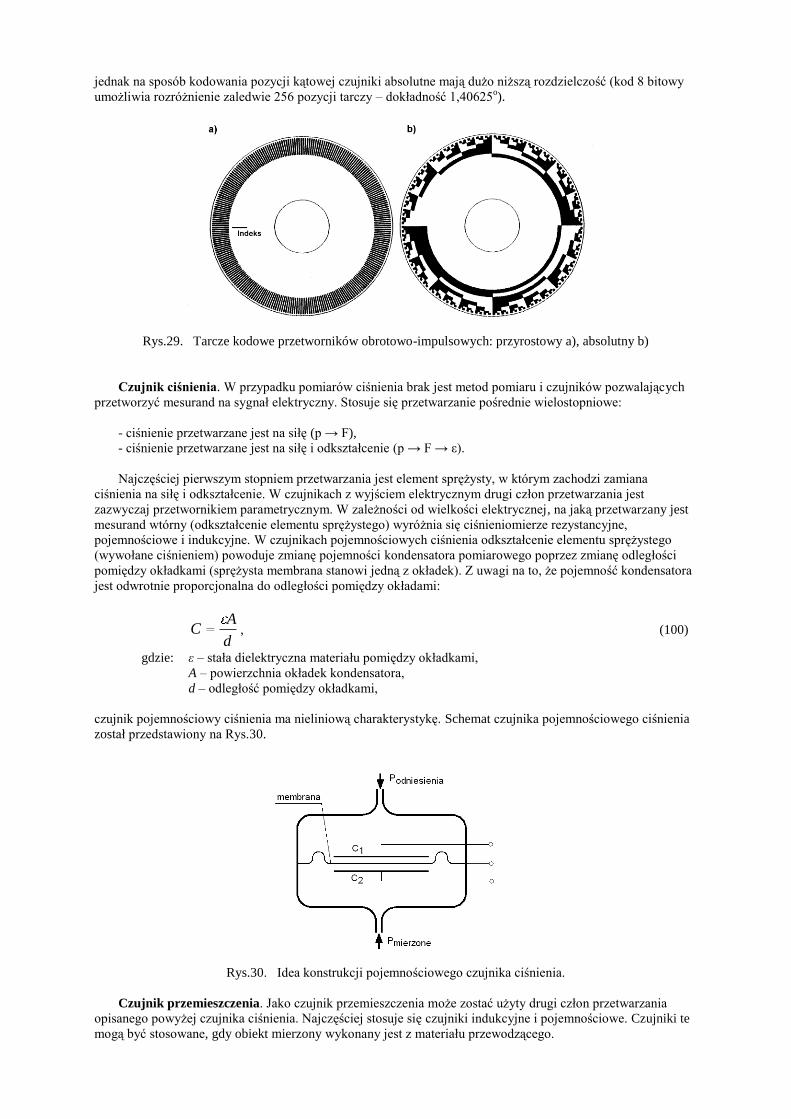
7. Projektowanie układu pomiarowego.
Ogólna struktura układu pomiarowego została przedstawiona na Rys.28.
Rys.28. Struktura układu pomiarowego
W skład układu pomiarowego wchodzą:
1) czujnik pomiarowy (przetwarzający wielość mierzoną w inną wielkość fizyczną, łatwiej mierzalną). W
szczególnym wypadku następuje przetwarzanie wielkości nieelektrycznej w inną wielkość nieelektryczną
łatwiejszą do przetworzenia na wielkość elektryczną. Często żądamy, aby czujnik pomiarowy realizował
separacją galwaniczną pomiędzy obiektem mierzonym, a układem pomiarowym;
2) przetwornik pomiarowy (przetwarzający wielość fizyczną w inną wielkość fizyczną, łatwiej mierzalną). Z
reguły następuje przetworzenie wielkości nieelektrycznej na wielkość elektryczną. Przetworniki pomiarowe
mogą także spełniać rolę czujników pomiarowych;
3) układ dopasowujący (realizujący dopasowanie zakresu wyjściowego czujnika pomiarowego lub
przetwornika pomiarowego do zakresu wejściowego innego przetwornika pomiarowego;
4) multiplekser (komutator analogowy umożliwiający współpracę przyrządu pomiarowego z wieloma
czujnikami pomiarowymi);
5) przetwornik analogowo-cyfrowy (specjalny typ przetwornika pomiarowego będący elementem
nowoczesnych przyrządów pomiarowych zamieniający sygnał analogowy przetwornika pomiarowego lub
układu dopasowującego na postać cyfrową;
6,9)- mikrokontroler lub system komputerowy realizujący operację akwizycji i przetwarzania danych
pomiarowych. W prostych systemach pomiarowych zazwyczaj zastąpiony jest polem odczytowym;
7,8) układ przesyłania sygnałów pomiarowych na odległość (powinien charakteryzować się odpornością na
zakłócenia). Przykładem sygnałów odpornych na zakłócenia są sygnały prądu elektrycznego, częstotliwości
i zakresu czasu. Układ przesyłania danych pomiarowych składa się z nadajnika i odbiornika.
Przed przystąpieniem do realizacji układu pomiarowego powinna zostać dokonana ocena żądanej
niedokładności pomiaru i na jej podstawie wybrana racjonalna procedura pomiaru i struktura systemu
pomiarowego. Zgodnie z dokonaną oceną należy uwzględniając zasadę sumowania błędów granicznych (50 i
51) oszacować klasę dokładności poszczególnych elementów toru pomiarowego łącznie z ilością bitów
przetwornika analogowo-cyfrowego.
W dalszej kolejności przedstawione zostaną przykłady realizacji poszczególnych członów układu
pomiarowego. Należy podkreślić, że konkretna struktura układu pomiarowego może zawierać jedynie niektóre z
wymienionych powyżej członów.
7.1 Przegląd wybranych czujników pomiarowych
- Czujniki pomiarowe wielkości nieelektrycznych.
Czujnik położenia kątowego (przetwornik obrotowo-impulsowy). Podstawowym elementem jest tarcza
zawierająca znaczniki podziałowe, osadzona obrotowo na wałku. Tarczę najczęściej wykonuje się ze szkła.
Znaczniki nanosi się współśrodkowo na płaskiej części tarczy. Kreski (czujnik przyrostowy) lub wzór kodowy –
kod Graya (czujnik absolutny) powstają przez naparowane chromu (Rys.29.). Powierzchnia pokryta chromem
nie przepuszcza światła. Odczytu dokonuje się za pomocą elementów fotoelektrycznych zamieniających światło
lub jego brak odpowiednio w sygnał elektryczny o różnym poziomie. Siatka tarczy kreskowej może zawierać do
10000 (przetworniki przemysłowe) lub do 36000 kresek (wzorce przyrostowe kąta). W przetwornikach
przemysłowych w celu kontroli kierunku obrotów nanosi się drugi zestaw kresek, którego sygnał jest
przesunięty w fazie o 90o. Po operacji EXOR obu sygnałów uzyskuje się sygnał zawierający do 40000 impulsów
na obrót (dokładność 0,0065o). Czujnik przyrostowy wymaga zliczania impulsów w celu określenia pozycji
kątowej, dodatkowy znacznik indeksu umożliwia synchronizację zliczania z położeniem początkowym. Czujnik
absolutny określa dokładną informację o pozycji kątowej bez potrzeby ciągłego śledzenia impulsów. Z uwagi
jednak na sposób kodowania pozycji kątowej czujniki absolutne mają dużo niższą rozdzielczość (kod 8 bitowy
umożliwia rozróżnienie zaledwie 256 pozycji tarczy – dokładność 1,40625o).
Rys.29. Tarcze kodowe przetworników obrotowo-impulsowych: przyrostowy a), absolutny b)
Czujnik ciśnienia. W przypadku pomiarów ciśnienia brak jest metod pomiaru i czujników pozwalających
przetworzyć mesurand na sygnał elektryczny. Stosuje się przetwarzanie pośrednie wielostopniowe:
- ciśnienie przetwarzane jest na siłę (p → F),
- ciśnienie przetwarzane jest na siłę i odkształcenie (p → F → ε).
Najczęściej pierwszym stopniem przetwarzania jest element sprężysty, w którym zachodzi zamiana
ciśnienia na siłę i odkształcenie. W czujnikach z wyjściem elektrycznym drugi człon przetwarzania jest
zazwyczaj przetwornikiem parametrycznym. W zależności od wielkości elektrycznej, na jaką przetwarzany jest
mesurand wtórny (odkształcenie elementu sprężystego) wyróżnia się ciśnieniomierze rezystancyjne,
pojemnościowe i indukcyjne. W czujnikach pojemnościowych ciśnienia odkształcenie elementu sprężystego
(wywołane ciśnieniem) powoduje zmianę pojemności kondensatora pomiarowego poprzez zmianę odległości
pomiędzy okładkami (sprężysta membrana stanowi jedną z okładek). Z uwagi na to, że pojemność kondensatora
jest odwrotnie proporcjonalna do odległości pomiędzy okładami:
d
AC , (100)
gdzie: ε – stała dielektryczna materiału pomiędzy okładkami,
A – powierzchnia okładek kondensatora,
d – odległość pomiędzy okładkami,
czujnik pojemnościowy ciśnienia ma nieliniową charakterystykę. Schemat czujnika pojemnościowego ciśnienia
został przedstawiony na Rys.30.
Rys.30. Idea konstrukcji pojemnościowego czujnika ciśnienia.
Czujnik przemieszczenia. Jako czujnik przemieszczenia może zostać użyty drugi człon przetwarzania
opisanego powyżej czujnika ciśnienia. Najczęściej stosuje się czujniki indukcyjne i pojemnościowe. Czujniki te
mogą być stosowane, gdy obiekt mierzony wykonany jest z materiału przewodzącego.

W czujniku pomiarowym pojemnościowym następuje przetworzenie sygnału wejściowego sξ (odległość
pomiędzy czujnikiem pomiarowym a badaną powierzchnią) w sygnał wyjściowy sf (sygnał częstotliwościowy):
)()]([ tstsP f , (101)
gdzie: P – operacja odwzorowania,
Za pomocą generatora spełniającego rolę przetwornika pojemność- częstotliwość. Pulsacja generatora czujnika
pomiarowego jest nieliniową funkcją odległości pomiędzy elektrodą pomiarową i powierzchnią komutatora (87).
Charakterystykę czujnika pomiarowego (zależność między pulsacją generatora a odległością wzajemną czujnika
pomiarowego i powierzchnią komutatora) opisuje nieliniowa zależność:
nnnf cbsa , (102)
gdzie: an, bn, cn – parametry konstrukcyjne.
Wyznaczona doświadczalnie charakterystyka czujnika pomiarowego wraz z zaznaczonym zakresem pracy
pokazana jest na Rys.31.
Charakterystykę czujnika pomiarowego dla ograniczonego zakresu pracy (zakres pracy czujnika
pomiarowego można tak dobrać, aby uzyskać maksymalną czułość przy nieliniowości nieprzekraczającej 1%)
można opisać liniową zależnością:
)( 00 sskf , (103)
gdzie: ω0 – pulsacja początkowa sygnału czujnika pomiarowego,
kξ – współczynnik,
sξ0 – odległość początkowa pomiędzy czujnikiem pomiarowym a powierzchnią komutatora.
Rys.31. Charakterystyka pojemnościowej sondy pomiarowej.
Informacja o odkształceniu powierzchni komutatora (zmianie odległości wzajemnej pomiędzy
czujnikiem pomiarowym i powierzchnią komutatora) jest zawarta w zmianie pulsacji sygnału generatora
czujnika pomiarowego:
])(sin[)( 0 dttsktUts ff , (104)
gdzie: Uf – amplituda sygnału generatora czujnika pomiarowego.
Pulsację chwilową zmodulowanego częstotliwościowo sygnału generatora czujnika pomiarowego opisuje
zależność:
)(]d)([d
d00 tskttsk
tf . (105)
Zmodulowany częstotliwościowo sygnał wyjściowy czujnika pomiarowego sf(t) zamieniany jest na sygnał
napięciowy sd#(t) za pomocą demodulatora (przetwornika częstotliwość-napięcie) (Rys.32.).
Rys.32. Schemat działania demodulatora.
Przetwornik częstotliwość-napięcie składa się z detektora fazy, filtru dolnoprzepustowego oraz generatora
przestrajanego napięciem GPN. Sygnał napięciowy sd#(t) odwzorowuje zmiany częstotliwości sygnału sf(t), a
zatem także zmianę odległości d pomiędzy powierzchnią mierzoną i okładka pomiarową czujnika.
7.2 Przegląd wybranych przetworników pomiarowych
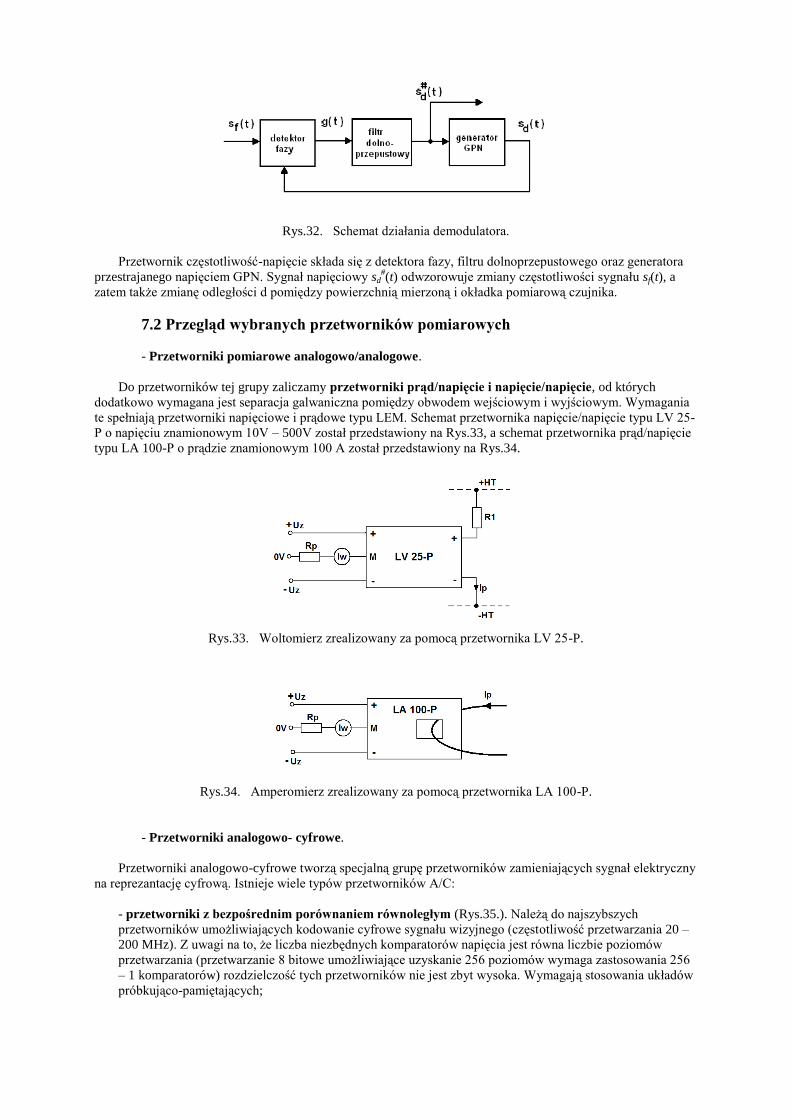
- Przetworniki pomiarowe analogowo/analogowe.
Do przetworników tej grupy zaliczamy przetworniki prąd/napięcie i napięcie/napięcie, od których
dodatkowo wymagana jest separacja galwaniczna pomiędzy obwodem wejściowym i wyjściowym. Wymagania
te spełniają przetworniki napięciowe i prądowe typu LEM. Schemat przetwornika napięcie/napięcie typu LV 25-
P o napięciu znamionowym 10V – 500V został przedstawiony na Rys.33, a schemat przetwornika prąd/napięcie
typu LA 100-P o prądzie znamionowym 100 A został przedstawiony na Rys.34.
Rys.33. Woltomierz zrealizowany za pomocą przetwornika LV 25-P.
Rys.34. Amperomierz zrealizowany za pomocą przetwornika LA 100-P.
- Przetworniki analogowo- cyfrowe.
Przetworniki analogowo-cyfrowe tworzą specjalną grupę przetworników zamieniających sygnał elektryczny
na reprezantację cyfrową. Istnieje wiele typów przetworników A/C:
- przetworniki z bezpośrednim porównaniem równoległym (Rys.35.). Należą do najszybszych
przetworników umożliwiających kodowanie cyfrowe sygnału wizyjnego (częstotliwość przetwarzania 20 –
200 MHz). Z uwagi na to, że liczba niezbędnych komparatorów napięcia jest równa liczbie poziomów
przetwarzania (przetwarzanie 8 bitowe umożliwiające uzyskanie 256 poziomów wymaga zastosowania 256
– 1 komparatorów) rozdzielczość tych przetworników nie jest zbyt wysoka. Wymagają stosowania układów
próbkująco-pamiętających;
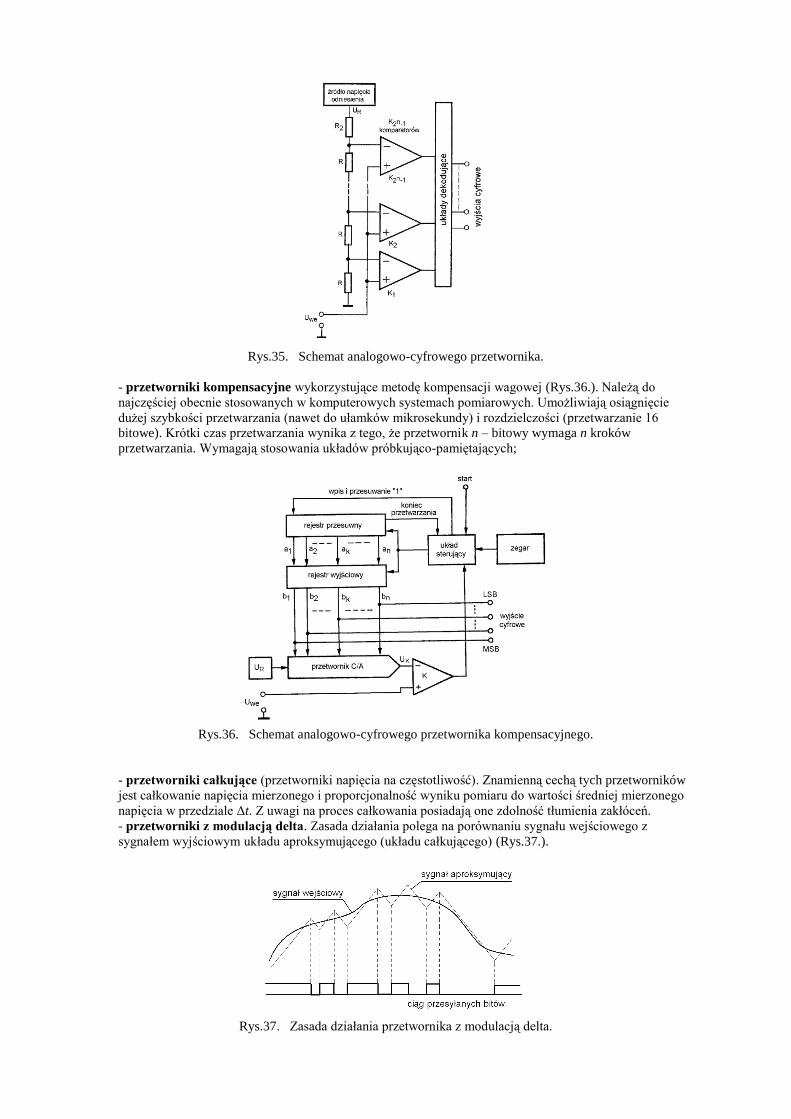
Rys.35. Schemat analogowo-cyfrowego przetwornika.
- przetworniki kompensacyjne wykorzystujące metodę kompensacji wagowej (Rys.36.). Należą do
najczęściej obecnie stosowanych w komputerowych systemach pomiarowych. Umożliwiają osiągnięcie
dużej szybkości przetwarzania (nawet do ułamków mikrosekundy) i rozdzielczości (przetwarzanie 16
bitowe). Krótki czas przetwarzania wynika z tego, że przetwornik n – bitowy wymaga n kroków
przetwarzania. Wymagają stosowania układów próbkująco-pamiętających;
Rys.36. Schemat analogowo-cyfrowego przetwornika kompensacyjnego.
- przetworniki całkujące (przetworniki napięcia na częstotliwość). Znamienną cechą tych przetworników
jest całkowanie napięcia mierzonego i proporcjonalność wyniku pomiaru do wartości średniej mierzonego
napięcia w przedziale Δt. Z uwagi na proces całkowania posiadają one zdolność tłumienia zakłóceń.
- przetworniki z modulacją delta. Zasada działania polega na porównaniu sygnału wejściowego z
sygnałem wyjściowym układu aproksymującego (układu całkującego) (Rys.37.).
Rys.37. Zasada działania przetwornika z modulacją delta.
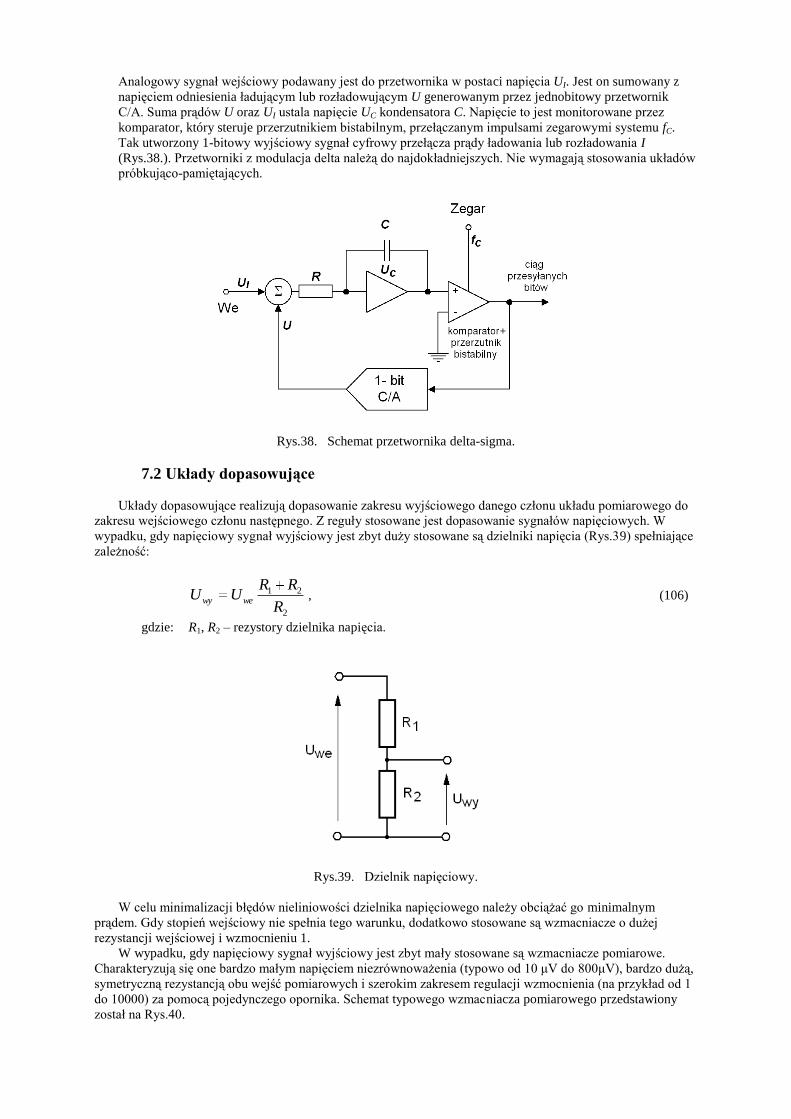
Analogowy sygnał wejściowy podawany jest do przetwornika w postaci napięcia UI. Jest on sumowany z
napięciem odniesienia ładującym lub rozładowującym U generowanym przez jednobitowy przetwornik
C/A. Suma prądów U oraz UI ustala napięcie UC kondensatora C. Napięcie to jest monitorowane przez
komparator, który steruje przerzutnikiem bistabilnym, przełączanym impulsami zegarowymi systemu fC.
Tak utworzony 1-bitowy wyjściowy sygnał cyfrowy przełącza prądy ładowania lub rozładowania I
(Rys.38.). Przetworniki z modulacja delta należą do najdokładniejszych. Nie wymagają stosowania układów
próbkująco-pamiętających.
Rys.38. Schemat przetwornika delta-sigma.
7.2 Układy dopasowujące
Układy dopasowujące realizują dopasowanie zakresu wyjściowego danego członu układu pomiarowego do
zakresu wejściowego członu następnego. Z reguły stosowane jest dopasowanie sygnałów napięciowych. W
wypadku, gdy napięciowy sygnał wyjściowy jest zbyt duży stosowane są dzielniki napięcia (Rys.39) spełniające
zależność:
2
21
R
RRUU wewy , (106)
gdzie: R1, R2 – rezystory dzielnika napięcia.
Rys.39. Dzielnik napięciowy.
W celu minimalizacji błędów nieliniowości dzielnika napięciowego należy obciążać go minimalnym
prądem. Gdy stopień wejściowy nie spełnia tego warunku, dodatkowo stosowane są wzmacniacze o dużej
rezystancji wejściowej i wzmocnieniu 1.
W wypadku, gdy napięciowy sygnał wyjściowy jest zbyt mały stosowane są wzmacniacze pomiarowe.
Charakteryzują się one bardzo małym napięciem niezrównoważenia (typowo od 10 μV do 800μV), bardzo dużą,
symetryczną rezystancją obu wejść pomiarowych i szerokim zakresem regulacji wzmocnienia (na przykład od 1
do 10000) za pomocą pojedynczego opornika. Schemat typowego wzmacniacza pomiarowego przedstawiony
został na Rys.40.
Rys. 40. Schemat wzmacniacza pomiarowego.
Wzmacniacz pomiarowy zrealizowany jest za pomocą trzech precyzyjnych wzmacniaczy operacyjnych,
umieszczonych na jednej strukturze krzemowej, gwarantującej ten sam dryft temperaturowy wszystkich
elementów. Wzmocnienie układu k reguluje się doborem rezystancji RG zgodnie z zależnością:
GRk
k501 . (107)
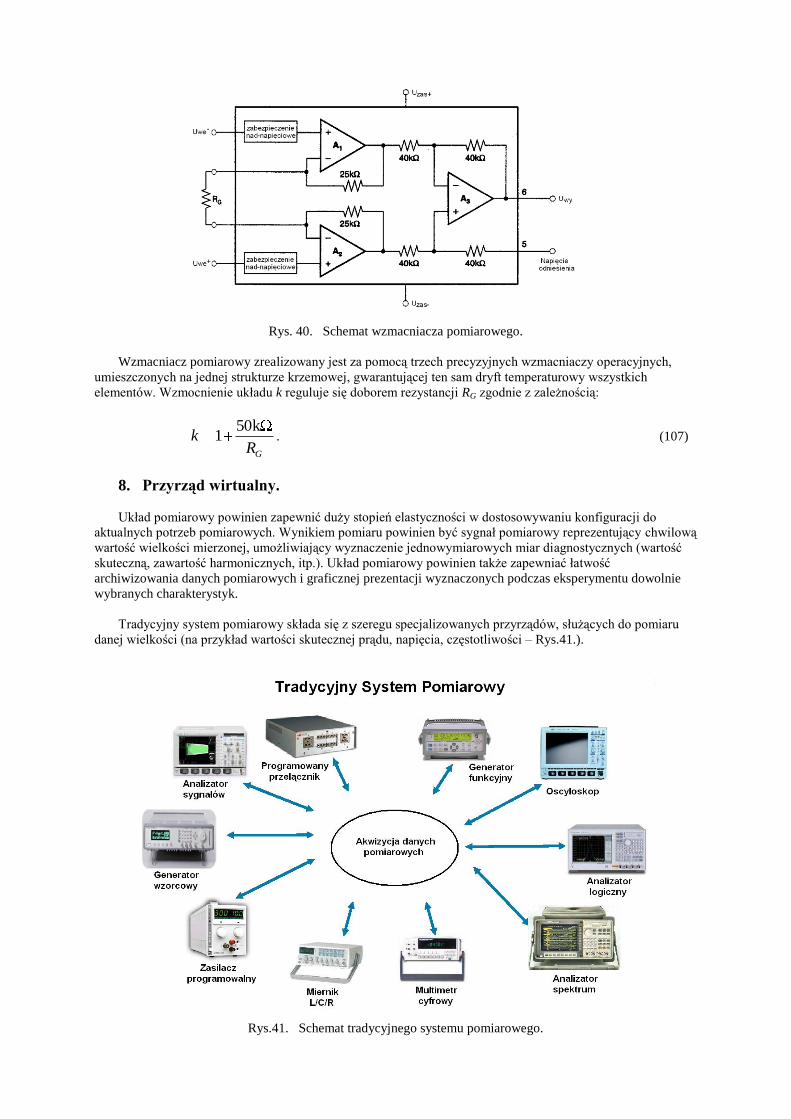
8. Przyrząd wirtualny.
Układ pomiarowy powinien zapewnić duży stopień elastyczności w dostosowywaniu konfiguracji do
aktualnych potrzeb pomiarowych. Wynikiem pomiaru powinien być sygnał pomiarowy reprezentujący chwilową
wartość wielkości mierzonej, umożliwiający wyznaczenie jednowymiarowych miar diagnostycznych (wartość
skuteczną, zawartość harmonicznych, itp.). Układ pomiarowy powinien także zapewniać łatwość
archiwizowania danych pomiarowych i graficznej prezentacji wyznaczonych podczas eksperymentu dowolnie
wybranych charakterystyk.
Tradycyjny system pomiarowy składa się z szeregu specjalizowanych przyrządów, służących do pomiaru
danej wielkości (na przykład wartości skutecznej prądu, napięcia, częstotliwości – Rys.41.).
Rys.41. Schemat tradycyjnego systemu pomiarowego.
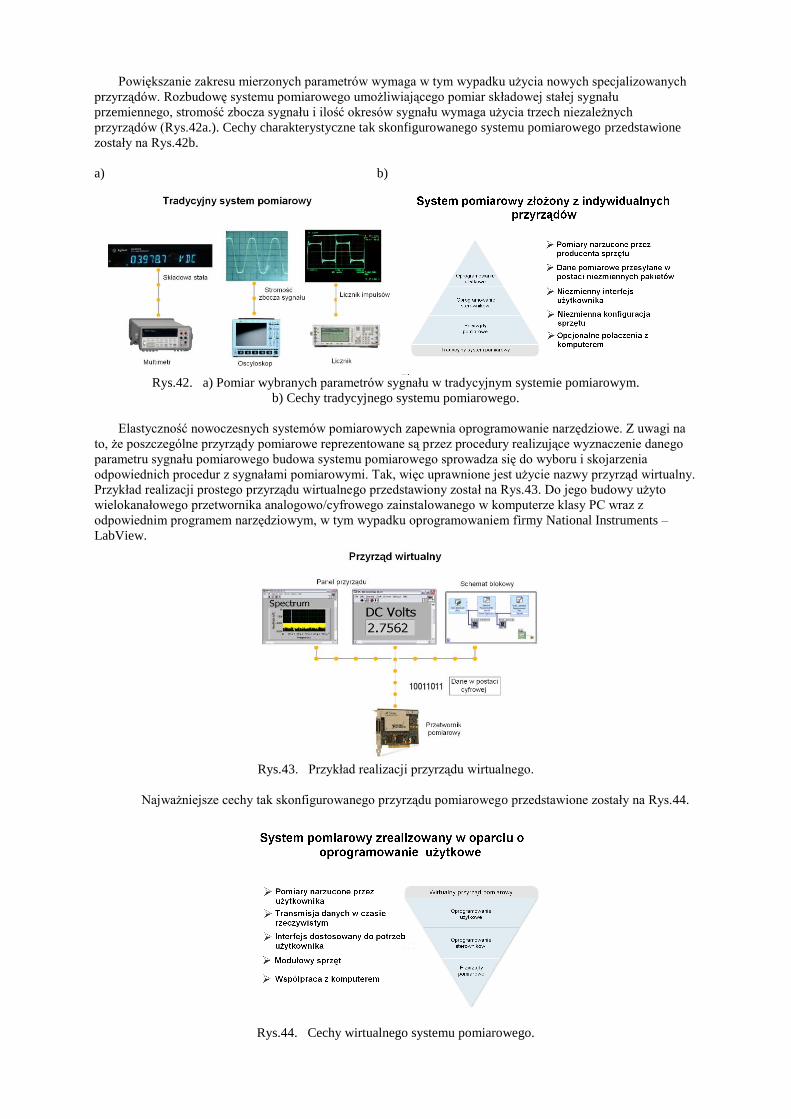
Powiększanie zakresu mierzonych parametrów wymaga w tym wypadku użycia nowych specjalizowanych
przyrządów. Rozbudowę systemu pomiarowego umożliwiającego pomiar składowej stałej sygnału
przemiennego, stromość zbocza sygnału i ilość okresów sygnału wymaga użycia trzech niezależnych
przyrządów (Rys.42a.). Cechy charakterystyczne tak skonfigurowanego systemu pomiarowego przedstawione
zostały na Rys.42b.
a) b)
Rys.42. a) Pomiar wybranych parametrów sygnału w tradycyjnym systemie pomiarowym.
b) Cechy tradycyjnego systemu pomiarowego.
Elastyczność nowoczesnych systemów pomiarowych zapewnia oprogramowanie narzędziowe. Z uwagi na
to, że poszczególne przyrządy pomiarowe reprezentowane są przez procedury realizujące wyznaczenie danego
parametru sygnału pomiarowego budowa systemu pomiarowego sprowadza się do wyboru i skojarzenia
odpowiednich procedur z sygnałami pomiarowymi. Tak, więc uprawnione jest użycie nazwy przyrząd wirtualny.
Przykład realizacji prostego przyrządu wirtualnego przedstawiony został na Rys.43. Do jego budowy użyto
wielokanałowego przetwornika analogowo/cyfrowego zainstalowanego w komputerze klasy PC wraz z
odpowiednim programem narzędziowym, w tym wypadku oprogramowaniem firmy National Instruments –
LabView.
Rys.43. Przykład realizacji przyrządu wirtualnego.
Najważniejsze cechy tak skonfigurowanego przyrządu pomiarowego przedstawione zostały na Rys.44.
Rys.44. Cechy wirtualnego systemu pomiarowego.
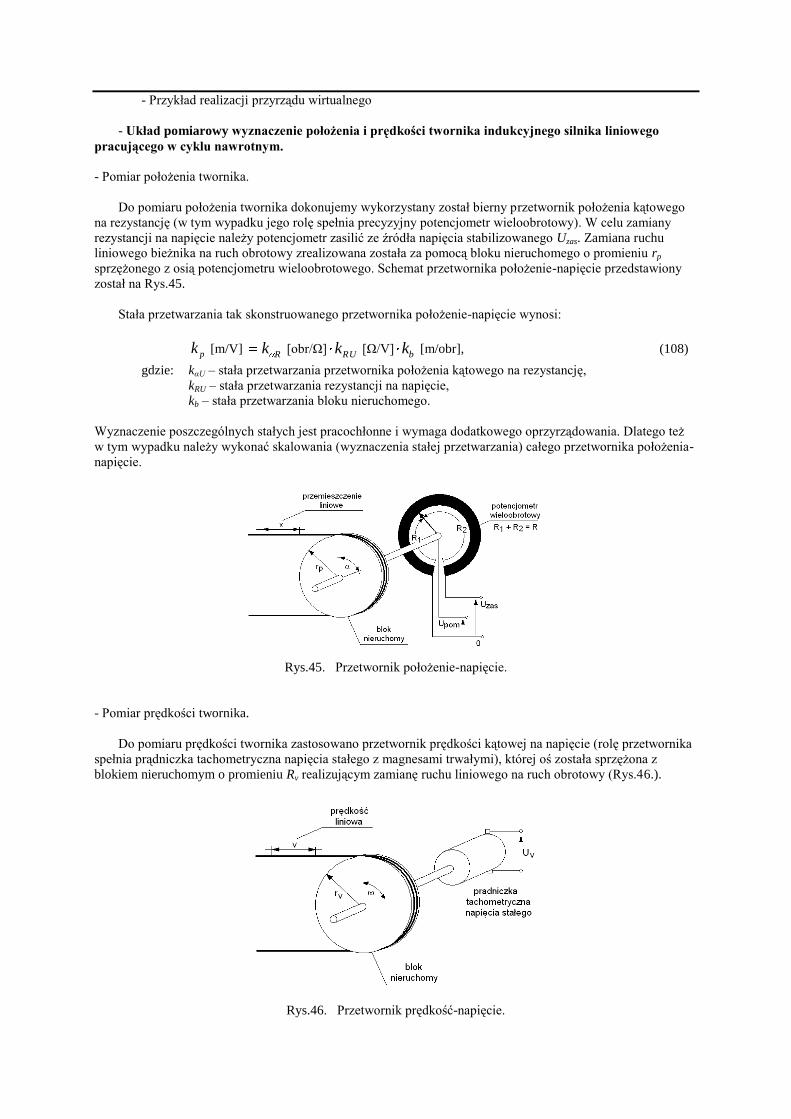
- Przykład realizacji przyrządu wirtualnego
- Układ pomiarowy wyznaczenie położenia i prędkości twornika indukcyjnego silnika liniowego
pracującego w cyklu nawrotnym.
- Pomiar położenia twornika.
Do pomiaru położenia twornika dokonujemy wykorzystany został bierny przetwornik położenia kątowego
na rezystancję (w tym wypadku jego rolę spełnia precyzyjny potencjometr wieloobrotowy). W celu zamiany
rezystancji na napięcie należy potencjometr zasilić ze źródła napięcia stabilizowanego Uzas. Zamiana ruchu
liniowego bieżnika na ruch obrotowy zrealizowana została za pomocą bloku nieruchomego o promieniu rp
sprzężonego z osią potencjometru wieloobrotowego. Schemat przetwornika położenie-napięcie przedstawiony
został na Rys.45.
Stała przetwarzania tak skonstruowanego przetwornika położenie-napięcie wynosi:
pk [m/V] Rk [obr/Ω]
RUk [Ω/V]bk [m/obr], (108)
gdzie: kαU – stała przetwarzania przetwornika położenia kątowego na rezystancję,
kRU – stała przetwarzania rezystancji na napięcie,
kb – stała przetwarzania bloku nieruchomego.
Wyznaczenie poszczególnych stałych jest pracochłonne i wymaga dodatkowego oprzyrządowania. Dlatego też
w tym wypadku należy wykonać skalowania (wyznaczenia stałej przetwarzania) całego przetwornika położenia-
napięcie.
Rys.45. Przetwornik położenie-napięcie.
- Pomiar prędkości twornika.
Do pomiaru prędkości twornika zastosowano przetwornik prędkości kątowej na napięcie (rolę przetwornika
spełnia prądniczka tachometryczna napięcia stałego z magnesami trwałymi), której oś została sprzężona z
blokiem nieruchomym o promieniu Rv realizującym zamianę ruchu liniowego na ruch obrotowy (Rys.46.).
Rys.46. Przetwornik prędkość-napięcie.
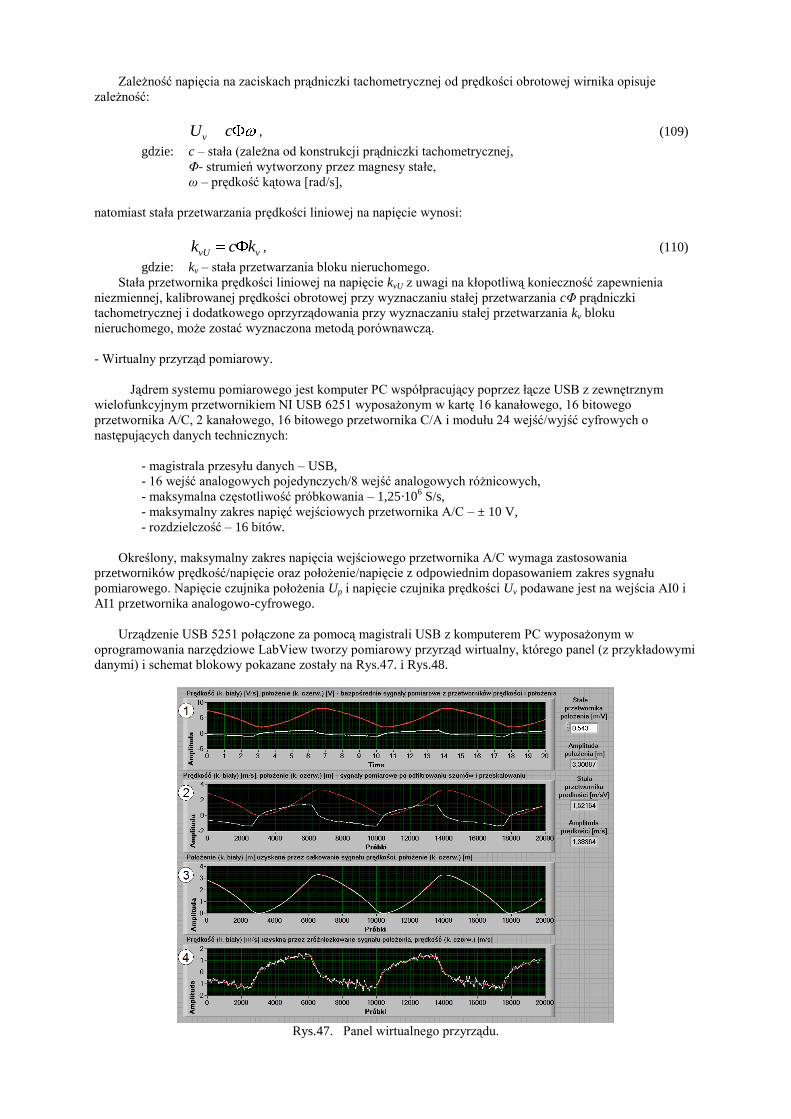
Zależność napięcia na zaciskach prądniczki tachometrycznej od prędkości obrotowej wirnika opisuje
zależność:
cUv, (109)
gdzie: c – stała (zależna od konstrukcji prądniczki tachometrycznej,
Φ- strumień wytworzony przez magnesy stałe,
ω – prędkość kątowa [rad/s],
natomiast stała przetwarzania prędkości liniowej na napięcie wynosi:
vvU kck , (110)
gdzie: kv – stała przetwarzania bloku nieruchomego.
Stała przetwornika prędkości liniowej na napięcie kvU z uwagi na kłopotliwą konieczność zapewnienia
niezmiennej, kalibrowanej prędkości obrotowej przy wyznaczaniu stałej przetwarzania cΦ prądniczki
tachometrycznej i dodatkowego oprzyrządowania przy wyznaczaniu stałej przetwarzania kv bloku
nieruchomego, może zostać wyznaczona metodą porównawczą.
- Wirtualny przyrząd pomiarowy.
Jądrem systemu pomiarowego jest komputer PC współpracujący poprzez łącze USB z zewnętrznym
wielofunkcyjnym przetwornikiem NI USB 6251 wyposażonym w kartę 16 kanałowego, 16 bitowego
przetwornika A/C, 2 kanałowego, 16 bitowego przetwornika C/A i modułu 24 wejść/wyjść cyfrowych o
następujących danych technicznych:
- magistrala przesyłu danych – USB,
- 16 wejść analogowych pojedynczych/8 wejść analogowych różnicowych,
- maksymalna częstotliwość próbkowania – 1,25·106 S/s,
- maksymalny zakres napięć wejściowych przetwornika A/C – ± 10 V,
- rozdzielczość – 16 bitów.
Określony, maksymalny zakres napięcia wejściowego przetwornika A/C wymaga zastosowania
przetworników prędkość/napięcie oraz położenie/napięcie z odpowiednim dopasowaniem zakres sygnału
pomiarowego. Napięcie czujnika położenia Up i napięcie czujnika prędkości Uv podawane jest na wejścia AI0 i
AI1 przetwornika analogowo-cyfrowego.
Urządzenie USB 5251 połączone za pomocą magistrali USB z komputerem PC wyposażonym w
oprogramowania narzędziowe LabView tworzy pomiarowy przyrząd wirtualny, którego panel (z przykładowymi
danymi) i schemat blokowy pokazane zostały na Rys.47. i Rys.48.
Rys.47. Panel wirtualnego przyrządu.
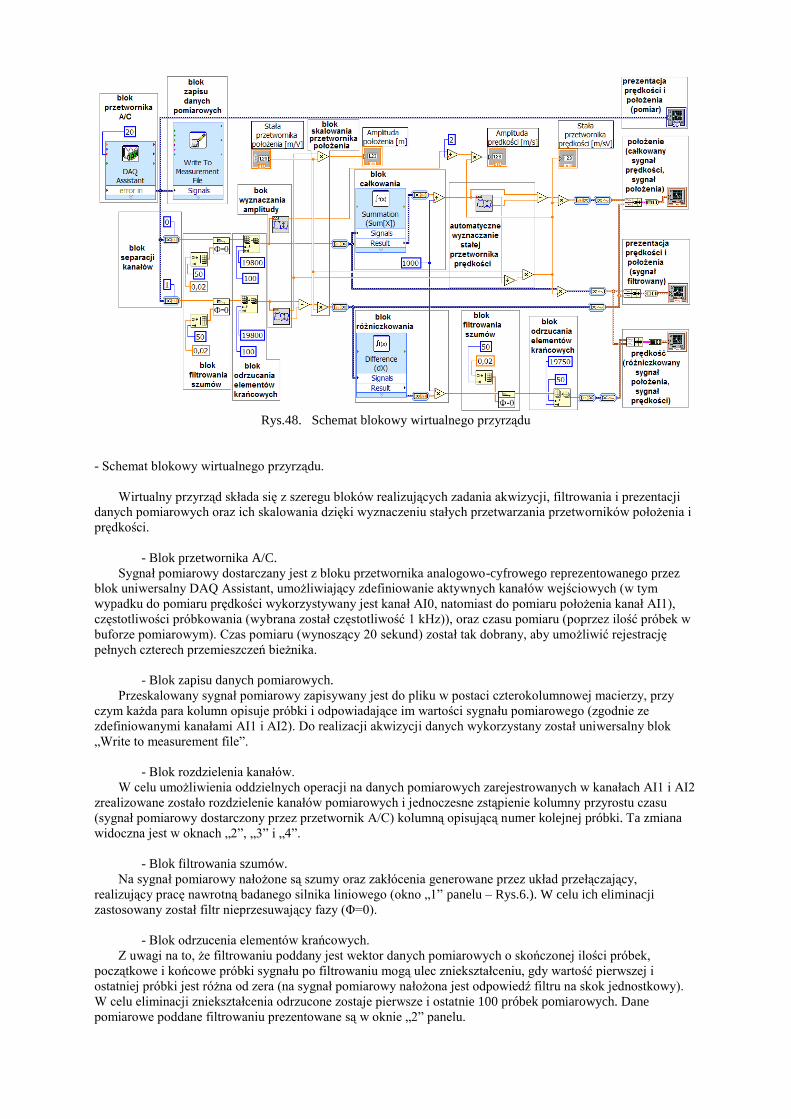
Rys.48. Schemat blokowy wirtualnego przyrządu
- Schemat blokowy wirtualnego przyrządu.
Wirtualny przyrząd składa się z szeregu bloków realizujących zadania akwizycji, filtrowania i prezentacji
danych pomiarowych oraz ich skalowania dzięki wyznaczeniu stałych przetwarzania przetworników położenia i
prędkości.
- Blok przetwornika A/C.
Sygnał pomiarowy dostarczany jest z bloku przetwornika analogowo-cyfrowego reprezentowanego przez
blok uniwersalny DAQ Assistant, umożliwiający zdefiniowanie aktywnych kanałów wejściowych (w tym
wypadku do pomiaru prędkości wykorzystywany jest kanał AI0, natomiast do pomiaru położenia kanał AI1),
częstotliwości próbkowania (wybrana został częstotliwość 1 kHz)), oraz czasu pomiaru (poprzez ilość próbek w
buforze pomiarowym). Czas pomiaru (wynoszący 20 sekund) został tak dobrany, aby umożliwić rejestrację
pełnych czterech przemieszczeń bieżnika.
- Blok zapisu danych pomiarowych.
Przeskalowany sygnał pomiarowy zapisywany jest do pliku w postaci czterokolumnowej macierzy, przy
czym każda para kolumn opisuje próbki i odpowiadające im wartości sygnału pomiarowego (zgodnie ze
zdefiniowanymi kanałami AI1 i AI2). Do realizacji akwizycji danych wykorzystany został uniwersalny blok
„Write to measurement file”.
- Blok rozdzielenia kanałów.
W celu umożliwienia oddzielnych operacji na danych pomiarowych zarejestrowanych w kanałach AI1 i AI2
zrealizowane zostało rozdzielenie kanałów pomiarowych i jednoczesne zstąpienie kolumny przyrostu czasu
(sygnał pomiarowy dostarczony przez przetwornik A/C) kolumną opisującą numer kolejnej próbki. Ta zmiana
widoczna jest w oknach „2”, „3” i „4”.
- Blok filtrowania szumów.
Na sygnał pomiarowy nałożone są szumy oraz zakłócenia generowane przez układ przełączający,
realizujący pracę nawrotną badanego silnika liniowego (okno „1” panelu – Rys.6.). W celu ich eliminacji
zastosowany został filtr nieprzesuwający fazy (Φ=0).
- Blok odrzucenia elementów krańcowych.
Z uwagi na to, że filtrowaniu poddany jest wektor danych pomiarowych o skończonej ilości próbek,
początkowe i końcowe próbki sygnału po filtrowaniu mogą ulec zniekształceniu, gdy wartość pierwszej i
ostatniej próbki jest różna od zera (na sygnał pomiarowy nałożona jest odpowiedź filtru na skok jednostkowy).
W celu eliminacji zniekształcenia odrzucone zostaje pierwsze i ostatnie 100 próbek pomiarowych. Dane
pomiarowe poddane filtrowaniu prezentowane są w oknie „2” panelu.
- Blok wyznaczenia amplitudy sygnału.
Wyznaczenie amplitudy sygnału pomiarowego jest niezbędne do automatycznego obliczenia stałej
przetwarzania przetwornika prędkości i realizowane jest za pomocą odpowiedniej funkcji z katalogu „Signal
Processing/Waveform Measurements”.
- Blok skalowania czujnika położenia.
Skalowanie polega na wymnożeniu sygnału położenia przez stałą przetwornika położenia kp wprowadzonej
do okna „stała przetwornika położenia [m/V]” wirtualnego przyrządu na podstawie obliczeń dokonanych w
Tabeli 1).
- Blok automatycznego wyznaczenia stałej przetwornika prędkości.
W pierwszej kolejności następuje wyznaczenie maksymalnego zakresu amplitud odfiltrowanego sygnału
prędkości poddanego całkowaniu. Następnie iloraz maksymalnego zakresu amplitud sygnału położenia i
maksymalnego zakresu amplitud sygnału prędkości poddanego całkowaniu zostaje wymrożony przez stałą
przetwornika położenia kp. Wynik operacji prezentowany jest na panelu operacyjnym w postaci liczbowej
(okienko „Stała przetwornika prędkości [m/sV]”). W oknie „3” panelu następuje porównanie sygnału położenia
z przeskalowanym sygnałem położenia uzyskanym przez całkowanie sygnału prędkości – oba sygnały powinny
się pokrywać.
W celu weryfikacji poprawności automatycznego wyznaczenia stałej przetwornika prędkości, następuje
porównanie prawidłowo skalowanego sygnału prędkości z sygnałem prędkości uzyskanym przez
różniczkowanie skalowanego sygnału położenia (okno „4”). Należy zwrócić uwagę na to, że operacja
różniczkowania sygnału położenia wprowadza znaczne szumy, które są widoczne pomimo dodatkowego
filtrowania sygnału i odrzucenia elementów krańcowych.
Adam Biernat
Warszawa
Marzec 2009
![PODSTAWY ZAŻALENIA KASATORYJNEGO I ZAKRES KOGNICJI …€¦ · 5 J. Jod łowski [w:] J. Jodowski, W. Siedlecki, Postępowanie cywilne. Część ogólna, Warszawa 1958, s. 70. 6 Chodzi](https://static.fdocuments.pl/doc/165x107/60c73753fe2a1b3ca771b812/podstawy-zaalenia-kasatoryjnego-i-zakres-kognicji-5-j-jod-owski-w-j-jodowski.jpg)













![NEWSLETTER - bwm.ukw.edu.pl11.KALENDARZ IMPREZ [s. 13] Kontakt: BIURO WSPÓŁPRACY MIĘDZYNARODOWEJ PUNKT KONTAKTOWY DS. 7. PROGRAMU RAMOWEGO UE DZIAŁ NAUKI ul. Chodkiewicza 30, 85-064](https://static.fdocuments.pl/doc/165x107/5f065f057e708231d417a8f3/newsletter-bwmukwedupl-11kalendarz-imprez-s-13-kontakt-biuro-wsppracy.jpg)
