Na Zaliczenie - Kochman - Algebra

of 24
Transcript of Na Zaliczenie - Kochman - Algebra
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
1/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA
Źródło: www.touchmathematics.org
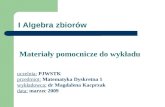
TTRRY Y GGOONNOOMMEETTRRII A A
0° 30°
45°
60°
90°
180°
π
270°
360°
2π
I II III IV
sin α 0 1/2 22 2 1 0 -1 0 + + – –
cos α 1 2 22 1/2 0 -1 0 1 + – – +
tg α 0 1 n.o. 0 n.o. 0 + – + –
ctg α n.o. 1 0 n.o. 0 n.o. + – + –
Podstawowe tożsamości:
Wzory redukcyjne:
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
2/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA Funkcje sumy i różnicy kątów:
Funkcje wielokrotności kątów:
Suma i różnica funkcji:
Funkcje połowy kąta:
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
3/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA LLIICCZZBBYY ZZEESSPPOOLLOONNEE
Definicja: Liczby zespolone (complex) ,x - część rzeczywista (Re z ), y – część urojona (Im z ) l.z.
Postać algebraiczna: z = x + i y , i – jednostka urojona l.z., gdzie i2 = -1.
Własności:
1) z1 = z2 x1 = x2 ∧ y1 = y2
2) z1 ± z2 = (x1 ± x2; y1 ± y2) = (x1 ± x2) +i(y1 ± y2)3) z1 · z2 = (x1x2 - y1y2; x1y2 + x2y1) = (x1x2 - y1y2) + i(x1y2 + x2y1)
4)
Definicje: liczba przeciwna: z = (- x; - y) = x – iy; z + ( z) = 0
liczba odwrotna:
sprzężenie l.z.: moduł l.z.:
Własnościsprzężenia:
Własnościmodułu:
Argument główny: arg z – najmniejszy nieujemny kąt spełniający warunek
Argument l.z.:
r ≥ 0– moduł l. z.; φ ∊ R– argument l.z. 1) 2)
; 3) - wzór Moivre’a 4) 5)
6)
r ≥ 0– moduł l. z.; φ ∊ R– argument l.z.
1) 2) 5) z3)
6)
4) 7) 8) 1) 4) 2) 5) 3) 6) 7)
1) ; arg z≠0 2) 3) ; arg z≠0
4) ; k = 0 lub k = 15) 6) ; k = 0 lub k = 1; z 2≠0
1) 2) 3) 4) 5) 6)
z1 = x1 + iy1
z2 = x2 + iy2
z = x + iy
Argument i
argument
główny liczbyzespolonej
z = x + iy ≠ 0:
Własnościargumentu:
z ≠ 0
Postaćtrygono-
metryczna:
Postać
wykładnicza:
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
4/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA
Pierwiastek n-tego stopnia w: n ϵ N w,z ϵ C ozn. Uwaga: Istnieje zawsze n pierwiastków takiego równania Wzór: , k = 0, 1, 2, …, n-1 – najmniejszy nieujemny argument
7) 8) 1) 4) 2)
; 5) ; 3) 6)
Wzory Eulera:
Pierwiastkowanie
liczby zespolonej:
Interpretacja
geometryczna
pierwiastkówliczby zespolonej:
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
5/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA LLIICCZZBBYY ZZEESSPPOOLLOONNEE
Definicja: Liczby zespolone (complex) ,x - część rzeczywista (Re z ), y – część urojona (Im z ) l.z.
z = x + i y , i – jednostka urojona l.z., gdzie i2 = -1.
Własności:
1) z1 = z2 x1 = x2 ∧ y1 = y2
2) z1 ± z2 = (x1 ± x2; y1 ± y2) = (x1 ± x2) +i(y1 ± y2)
3) z1 · z2 = (x1x2 - y1y2; x1y2 + x2y1) = (x1x2 - y1y2) + i(x1y2 + x2y1)
4)
Definicje: liczba przeciwna: z = (- x; - y) = x – iy; z + ( z) = 0
liczba odwrotna:
sprzężenie l.z.:
moduł l.z.:
Własnościsprzężenia:
Własnościmodułu:
1) 2) 5) z3) 6) 4) 7) 8) 1) 4) 2) 5) 3)
6)
7)
z1 = x1 + iy1z2 = x2 + iy2
z = x + iy
Interpretacja
eometr czna
P o s t a ć a l g e
b r a i c z n a :
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
6/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA LLIICCZZBBYY ZZEESSPPOOLLOONNEE
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
7/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA LLIICCZZBBYY ZZEESSPPOOLLOONNEE
Argument główny: arg z – najmniejszy nieujemny kąt spełniającywarunek Argument l.z.:
1) ; arg z≠0 2) 3) ; arg z≠0
4) ; k = 0 lub k = 15)
6) ; k = 0 lub k = 1; z 2≠0
Argument i
argument
główny liczbyzespolonej
z = x + iy ≠ 0:
Własnościargumentu:
z ≠ 0
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
8/24
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
9/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA LLIICCZZBBYY ZZEESSPPOOLLOONNEE
r ≥ 0– moduł l. z.; φ ∊ R– argument l.z.
1) 2)
; 3) - wzór Moivre’a 4) 5)
6)
r ≥ 0– moduł l. z.; φ ∊ R– argument l.z.
1) 2) 3) 4) 5) 6) 7) 8) 1) 4) 2) ; 5) ; 3) 6)
P o s t a ć t r y g o n o m e t r y c z n a :
P o s t a ć w y k ł a d n i c z a :
Wzory
Eulera:
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
10/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA LLIICCZZBBYY ZZEESSPPOOLLOONNEE
Pierwiastek n-tego stopnia w: n ϵ N w,z ϵ C ozn. Uwaga: Istnieje zawsze n pierwiastków takiego równania
Wzór: , k = 0, 1, 2, …, n-1 – najmniejszy nieujemny argument
Pierwiastkowanie
liczby zespolonej:
Interpretacja
geometryczna
pierwiastkówliczby zespolonej:
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
11/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA
WWIIEELLOOMMII A ANNY Y
wwiieelloommiiaann rrzzeecczzyywwiisst t yy – wielomian stopnia n, gdyn – stopień wielomianu, an, an-1 , …, a 2 , a1 , a0 – współczynniki wielomianu wwiieelloommiiaann zzeessppoolloonnyy – wielomian stopnia n, gdy n – stopień wielomianu, cn, cn-1 , …, c 2 , c1 , c0 – współczynniki wielomianu
Twierdzenie Bezouta:
Liczbę x 0 nazywamy pierwiastkiem wielomianu W ( x ) (W ( x 0)=0)wtedy i tylko wtedy, gdy W ( x ) jest podzielnyprzez ( x – x 0).
Uwaga: Reszta z dzielenia wielomianu W ( x )/( x - x 0) = W( x 0)
Postać iloczynowa: wielomianu zespolonego W stopnia n∊N m dokłdnie n pierwistków jeśli pierwistek zj jest k j –krotny (k 1+k 2kmn wówczs Schemat Hornera:
Wykorzystując wielomian w postaci:
dzielenie wielomianu W(x) przez dwumian x-x0 można przeprowadzić według schematu:
x an an-1 … a2 a1 a0x0 bn-1 =an bn-2 = x0·bn-1 + an-1 b1 = x0·b2 + a2 b0 = x0·b1 + a1 R = x0·b0 + a0
gdzie W ( x )/( x – x 0) = P ( x ) + R; Zasadnicze twierdzenie algebry:
Każdy wielomian zespolony stopnia dodatniego ma co najmniej jeden pierwiastek zespolony.
Pierwiastki wielomianu:
Wielomian n-tego stopnia ma co najwyżej n pierwiastków rzeczywistych i dokładnie n pierwiastków
zespolonych.
x0 nazywamy pierwiastkiem k-krotnym k wielomianu W(x) jeżeli wielomian jest podzielnyprzez ( x – x 0)k , a nie jest podzielny przez ( x – x 0)k+1
Pierwiastki całkowite: Gdy współczynniki wielomianu są liczbami całkowitymi i pierwiastekwielomianu p jest liczbą całkowitą różną od zera to jest on dzielnikiem wyrazu wolnego a0.
Pierwiastki wymierne: Jeżeli wielomian o współczynnikach całkowitych ma pierwiastek, który jest
nieskracalnym ułamkiem postaci (liczba wymierna), p,q (liczby całkowite) to p jest dzielnikiem
wyrazu wolnego, a q jest dzielnikiem an Pierwiastek trójmianu kwadratowego: ∆>0 – dwa różne rzeczywiste pierwiastki
∆=0 – jeden dwukrotny rzeczywisty pierwiastek
∆
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
12/24
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
13/24
Liczby zespolone:
Obliczanie pierwiastków z liczb zespolonych w postaci algebraicznej: Pierwiastki z liczb zespolonych prościej jest obliczać w postaci trygonometrycznej
(wzory podane w karcie wzorów).
Jednak dla pierwiastków stopnia 2 i 3 można skorzystać z postaci algebraicznej:
; , = + , , ∈ √ = ; ∈ ; = + (, , ą ) = + = ( + ) + = +2 { = = 2 =
− = 4
= −4 4 = 0 - do wyznaczenia z układu równań y i x
W wyniku podajemy 1 = 1 + 1; = + ; przy czym ( z 1 = - z 2)√ , = + , , ∈ √ = ; ∈ ; = + (, , ą ) = + = ( + ) + = 3 +(3 )
{ = 3 = 3
{ = ( 3) = ( 3 )
- proste do rozwiązania tylko gdy a lub b jest równy 0 do wyznaczenia z układu równań y i x
W wyniku podajemy 1 = 1 + 1; = + , = +
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
14/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA MMAACCIIEERRZZEE
Typy macierzy i oznaczenia:
A = 0mxn= L =
diag(a11,a22,…,ann) =
AT =
macierz
wymiar mxn macierz zerowa
macierz trójkątna
dolna macierz diagonalna (nx
n)
macierz transponowana AT
do mac. A
B = U =
In=
B-1 =
macierz
kwadratowa
wymiar nxn
(stopnia n)
macierz
blokowa
wymiar mxn
macierz trójkątna
górna macierz jednostkowa (nxn)
macierz odwrotna B-1 do
mac. B
Suma, różnica macierzy, iloczyn macierzy przez liczbę (skalar)
A=
, A±B =
; A, B – wymiar mxn (łączymy elem. na tych samych pozycjach)
A= A = ; A– wymiar mxn ,αϵR (każdy element mac. razy liczbę) Własności działań 1) A +B = B+A 2) A + (B + C) = (A + B) + C
3) A +0 = 0+A = A 4) A + (- A) = 0
5) α(A + B) = αA + αB 6) (α + β)A = αA +βA
7) 1·A = A 8) (αβ)A = αβA
Iloczyn macierzy
Amxn= , C mxk = AB ; ; Macierze można mnożyć gdy ich
wewnętrzne wymiary są jednakowe,
zewnętrzne wymiary są wymiarami
macierzy wynikowej: Am·nBn·k = Cm·k Uwagi:
Iloczyn macierzy diagonalnych jest mac.
diagonalną.
Iloczyn macierzy trójkątnych górnych
(dolnych) jest mac. trój. górną (dolną)
Na ogół AB ≠ BA, jeżeli AB = BA macierze
takie nazywamy przemienne
Własności*:* prawdziwe jeżeli działania są wykonalne
1) A (B + C) = AB + AC
2) (A + B)C = AC + BC
3) A (αB) = (αA)B = α(AB)
4) (AB)C = A(BC)
5) AIn = A
6) ImA = A
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
15/24
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
16/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA MMAACCIIEERRZZEE
Własności (operacje) wyznaczników: oznaczenia dla operacji elementarnych na kolumnach
1. Wyznacznik macierzy z kolumną (wierszem) złożonym z samych zer jest równy 0.
2. Wyznacznik macierzy zmienia znak jeśli przestawimy dwie kolumny (wiersze). k i ⇿k j 3. Wyznacznik macierzy o dwóch jednakowych kolumnach (wierszach) jest równy 0.
4.
Jeżeli wszystkie elementy pewnej kolumny (wiersza) zawierają wspólny czynnik to
czynnik ten można wyznaczyć przed wyznacznik macierzy. ck j
5.
Wyznacznik macierzy kwadratowej, której elementy pewnej kolumny (wiersza) są
sumami dwóch składników jest równy sumie wyznaczników macierzy w którejkolumny (wiersze) są zastąpione tymi składnikami.
6. Wyznacznik macierzy nie zmieni się jeśli do elementów dowolnej kolumny (wiersza) dodamy
odpowiadający im element innej kolumny (wiersza) pomnożony przez dowolną liczbę k i+ck j
7. Wyznacznik mac. kwadratowej A i jej transpozycji jest taki sam det A = det AT
8. A1, A2, …, Ar mac. kwadratowe niekoniecznie tych samych stopni:
* trzy podkreślone własności nazywamy operacjami elementarnymi (są one wykorzystywane w algorytmie
Gaussa oraz Gaussa-Jordana , dla wyznaczenia macierzy odwrotnej)
1) det (A B) = det A · det B * 2) detAT = det A
3) det (A-1) = (det A)-1 4) det (Ak ) = (det A) k ,k ∊N *
5) det (cA) =cn det (A), n –stopień mac.
* własność 1 i 4 tworzą twierdzenie i wniosek tw. Cauchy’go o wyznaczniku iloczynu macierzy
Algorytm Gaussa obliczania wyznaczników:
Kolejne kroki zmniejszają stopień wyznacznika o 1. Zał: A = [aij] – mac. kwadratowa n≥2, a11≠0:
gdzie
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
17/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA MMAACCIIEERRZZEE
Macierz odwrotna
Definicja Zał: A – mac. kwadratowa, stopnia n, In - macierz jednostkowa st. n.
Macierz odwrotna do A ozn A-1: spełniająca warunek:
AA-1=A-1 A = InUwagi:
Jeżeli istnieje A-1 – macierz nazywamy odwracalną wówczas det A ≠0
Macierz odwrotna jest wyznaczona jednoznacznie
Macierz osobliwa – gdy det A=0, macierz nieosobliwa – gdy detA ≠ 0
Twierdzenie o postaci macierzy odwrotnej
1. Macierz jest odwracalna wtedy i tylko wtedy gdy jest nieosobliwa.
2. Jeżeli macierz A = [aij ] stopnia n jest nieosobliwa to:
gdzie Dij ozn. – dopełnienie algebraiczne elementu aij macierzy A.
Własności macierzy odwrotnych i wyznaczników:
1) det (A-1) = (det A)-1 2) (A-1) -1 = A
3) (A T) -1 = (A-1)T 4) (AB) -1 = B-1 A-1
5) (αA) -1 = (A)-1 6) (An) -1 = (A-1)nSchemat bezwyznacznikowego znajdowania macierzy odwrotnej:(metoda przekształceń elementarnych)
A – macierz kwadratowa nieosobliwa.
1. Do macierzy A z prawej strony dopisujemy macierz jednostkową – macierz blokowa 2. Na wierszach otrzymanej macierzy blokowej wykonujemy operacje elementarne
doprowadzając ją do postaci
Algorytm Gaussa – Jordana przekształcania macierzy nieosobliwej do macierzy jednostkowejA – macierz nieosobliwa, stopnia n≥2
1.
Otrzymanie macierzy trójkątnej górnej z jedynkami na przekątnej:
wykonując operację na wierszach (założenie że a11≠0):
Zerowanie elementów 1. kolumny (wiersze wi przekształcamy na wi’):
Operacje powtarzamy dla kolumny 2 i następnych– zaczynając od elementu na przekątnej.
(Zmieniamy tylko elementy na i pod przekątną).
Aż do uzyskania macierzy trójkątnej górnej:
2.
Otrzymanie macierzy jednostkowej
Zerowanie elementów nad przekątną (obliczamy tylko dla elementów nad przekątną)
(wiersze wi’ przekształcamy na wi’’):
Algorytm Gaussa-Jordana wykorzystywany jest do odwracania macierzy, określania rzędów oraz rozwiązywania
układów równań liniowych.
operacje elementarne
na wierszach A I I A-1
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
18/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA UUk k łłaaddyy rróówwnnaańń lliinniioowwyycchh
Definicja Układ równań liniowych Układem m równań liniowych z n niewiadomymi x1, x2, …, xn gdzie m, n ϵ N nazywamy układ równańpostaci: (
Rozwiązanie układu: ciąg liczb x1, x2, …, xn
Układowi temu odpowiada układ macierzowy AX = B, gdzie
A =
; X=
B =
A –macierz główna, X – kolumna niewiadomych, B – kolumna wyrazów wolnych
Układ jednorodny: AX = 0 Układ niejednorodny: AX = B (B≠0)
Układ Cramera: układ AX = B gdzie A jest macierzą kwadratową nieosobliwą (dla n niewiadomych jest n równań, det A≠ 0)
Rozwiązywanie układów Cramera: 1. Definicja: Układ Cramera ma dokładnie jedno rozwiązanie postaci:
n – stopień macierzy A, Aj – macierzy w której j-tą kolumnę zastąpiono kolumną wyrazów
wolnych B
2. Metoda macierzy odwrotnej: przekształcamy równanie z postaci AX = B mnożąc lewostronnie przez
A-1 do postaci: X = A-1B.3. Metoda eliminacji Gaussa-Jordana:
I.
Budujemy macierz rozszerzoną [A|B]
II.
Wyk onując operacje elementarne na wierszach przekształcamy ją do postaci [I|X].
gdzie A przechodzi w I (macierz jednostkowa) a B w X – kolumna rozwiązań.
[A|B]=
= [I|X]
Rząd macierzy
Definicja
Minor macierzy stopnia n: wyznacznik utworzony z elementów stojących na przecięciu wybranych k
kolumn i k wierszy. Macierz o wymiarach m*n posiada minorów stopnia k. Rząd macierzy: stopień największego niezerowego minora. Ozn. Rz(A) lub rank (A).Właściwości: 1) Rząd macierzy nieosobliwej jest równy jej stopniowi 2) Operacje elementarne na wierszach (kolumnach) nie zmieniają jej rzędu 3) Rząd macierzy i jej transpozycja są jednakowe rz(A) = rz(AT)
Metody wyznaczania rzędu 1) Z definicji, przekształcając macierz i badając minory.
2) Za pomocą operacji elementarnej przekształcając macierz do macierzy schodkowej: w kolejnych
niezerowych wierszach pierwsze niezerowe elementy znajdują się w kolumnach o rosnących
numerach (tworzą schodki). Rząd macierzy równy jest liczbie schodków.
Np.
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
19/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA UUk k łłaaddyy rróówwnnaańń lliinniioowwyycchh
Twierdzenie Kroneckera-Capellego
Układ równań macierzowych AX = B ma rozwiązanie wtedy i tylko wtedy gdy rząd macierzy A jest równyrzędowi macierzy rozszerzonej [A|B].
Rz A = Rz [A|B].Liczba rozwiązań układu (dla A stopnia n – n niewiadomych):
1) Rz A ≠Rz [A|B] - brak rozwiązań (sprzeczny),
2) Rz A = Rz [A|B] = n - jedno rozwiązanie (oznaczony),
3)
Rz A = Rz [A|B] = r < n - nieskończenie wiele rozwiązań, zależnych od n-r parametrów.
Metody rozwiązywania dowolnych układów równań
Definicja równoważność układów równań Dla A, A’, B, B’ o wymiarach odpowiednio: m×n, k ×n, m×1, k ×1, Gdzie X, X’ są macierzami niewiadomych
przy czym (x’1, x’2, …, x’n) jest permutacją ciągu (x1, x2, …, xn).
Mówimy że układy są równoważne jeżeli zbiory ich rozwiązań są jednakowe.
Przekształcenia równoważne:przekształcenia te zamieniają układ AX = B w układ równoważny (o tym samym zbiorze rozwiązań):
1)
Operacje elementarne na wierszach,
2) Skreślenie wiersza złożonego z samych zer, wi
3)
Skreślenie jednego z wierszy równych lub proporcjonalnych, wi ~wj 4) Zamiana miejscami dwóch kolumn macierzy A przy jednoczesnej zamianie odpowiadających im
niewiadomych.
Metoda eliminacji Gaussa-Jordana
AX = B – układ równań liniowych gdzie A jest wymiaru m×n
1) Budujemy macierz rozszerzoną układu postaci [A|B]
2) Na niej dokonujemy przekształceń równoważnych doprowadzając do postaci [A’|B’].
Interpretacja rozwiązania:a) zr+1 ≠ 0 - układ sprzeczny,
b) brak ostatniego wiersza (zerowego macierzy [A’|B’]) i n = r to układ AX = B jest równoważny
układowi Cramera - oznaczony, jego jedyne rozwiązanie tworzy kolumna z1, …., zr.c) brak ostatniego wiersza i n > r – układ AX = B jest nieoznaczony (nieskończenie wiele
rozwiązań), przy czym r niewiadomych jest zależnych od pozostałych n-r rozwiązań
(parametry).
r jest rzędem macierzy A. Uwaga: operacje nietypowe dla innych eliminacji Gaussa a tu występujące:
1)
Skreślenie wiersza zer,
2) Skreślenie wiersza równego lub proporcjonalnego do innego wiersza, 3) Brak elementu niezerowego w danej kolumnie ( nie można ustawić 1 na diagonali) –
przestawiamy całą kolumną wraz z niewiadomą na przedostatnie miejsce ( przed B) –
niewiadoma ta będzie parametrem.
przekształcenia równoważne
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
20/24
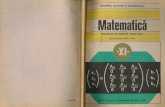
Operacje przekszta!ce" macierzy:
"#$%&'$()*+%,-% .$, /0$,)+$,-&1
2%$30$,)+$,-&.3%
30$,)+$),-% 4)+-%#$0
.53#.(,%6
)78.#0(4 9):'');
#.$3-=$03),-%
:&*)5?3 @#)4%#) AB
4%(.5) %7-4-,)+6-
9):'')CA 57) :&*)5?3
#?3,.3)D,0+E
!"#$%&'("*"+ ,-"./"0$-& *"+1 ,-"./"0$-"2
.&0 345
*"+1 ,-"./"0$-"2
.&0 345
.$-$6'"
*"+(&/7
*"+1 3 ,-"./"0$-"2
.&0 345
.$-$6'8 9,#1 /:-'";
F.7:4,= G3-%#'$%4H
$*.D.,04 $ ')40+E
$%# 6%'( #?3,0 IJ
,(& *1 $.-/$0'" ? @$%'"
=,/&A6(B
?
. $ 7 - $ 6 $ ' & . 7 ( " # " ' ( " 0 8 6 , $ ' " - ( & / = 7 " + C 2
' ( & ' " ,
$ 6 9 * ' " + C 2
" # $ % & ' $ ( ) * + % , - ) # ? 3 , . 3 ) D , %
=,/&A6"*8
K3-% 6%5,)&.3%
&.7:4,0G3-%#'$%H
,(2
-(
.&0 3 < 5 '(& (=0'(&>& *1 $.-1 ? @$%'"
=,/&A6(B
? =,/&A6"*8
>&.&' 7 '(+C
D E & / " + > & & 6 & * " 0 ' " / ' &
L#$%'()3-)40 53-%
&.7:4,0 G3-%#'$%HJ
,( !, >
-( !- >
.&0 3 < ? .&0 3F
. $ 7 - $
6 $ ' & . 7 ( " # " ' ( " 0 8 6 , $ ' " - ( & / = 7 " + C 2
' ( & ' " , $ 6 9 * ' " + C
E/7&=0"-(&'(&
.-:+C -(&/=78
. $ 7 - $
6 $ ' & . 7 ( " # " ' ( " 0 8 6 , $ ' " - ( & / = 7 " + C 2
' ( & ' " , $ 6 9 * ' " + C
E/7&=0"-(&'(&
.-:+C -(&/=78
.$7-$6$'&
/7 3 < /7 3F
. $ 7 - $
6 $ ' & . 7 ( " # " ' ( " 0 8 6 , $ ' " - ( & / = 7 " + C 2
' ( & ' " , $ 6 9 * ' " + C
E/7&=0"-(&'(&
.-:+C -(&/=78
E/7&=0"-(&'(&
.-:+C -(&/=78
3'$0'(&-% %7%4%,(0
"%3,%6 &.7:4,0
G3-%#'$)H $)3-%#)6=
3'"?7,0 +$0,,-&
+, >2 +-(
+45
.&0 3 < + G.&0 3F
+78''(, 0&' *$%'"
-87'"+78B E/7&.
-87'"+7'(, *"+(&/78
E$*'$%&'(&
-(&/=7" E/7&7
6(+7HI
E$*'$%&'(&
-(&/=7" E/7&7
6(+7HI
.$7-$6$'&
/7 3 < /7 3F
E/7&=0"-(&'(&
.-:+C -(&/=78
E/7&=0"-(&'(&
.-:+C
-(&/=78J
K. %7%4%,(?3
5.3.7,%6 &.7:4,0
G3-%#'$)H 5.5)40
.5".3-)5)6=+0 -4
%7%4%,( -,,%6
&.7:4,0 G3-%#'$)H
".4,.D.,0 "#$%$
5.3.7,= 7-+$2M
,(K+, > 2-(K+- >
+45
.$7-$6$'&
.&0 3< .&0 3F
.$ -(&/=7"
.$."'(& (''&L$
-(&/=7"M=0"#"
.$ -(&/=7"
.$."'(& (''&L$
-(&/=7"M=0"#"
.$7-$6$'&
/7 3 < /7 3F
.$ -(&/=7"
.$."'(& (''&L$
-(&/=7"M=0"#"
.$ -(&/=7"
.$."'(&
(''&L$
-(&/=7"M=0"#"
* tak #e metoda kolumn jednostkowych
1 Przekszta!cenia nie zmieniaj$ warto%ci wyznacznika
2 Dozwolone oznacza #e przekszta!cenia nie zmieniaj$ rz&du maciersy
3 Metoda eliminacji Gaussa oraz metoda kolumn jednostkowych
4 Dotyczy dowolnych uk !adów równa" liniowych
5 Dopuszczalne jest przestawienie dwóch kolumn przy jednoczesnej zamianie niewiadomych odpowiadaj$cych tym kolumn$
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
21/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA
GGEEOOMMEETTR R IIAA AA N NAALLIITTYYCCZZ N NAA
http://mathinsight.org
IIlloocczzyynn ssk k aallaarrnnyy ii wweek k t t oorroowwyy
Definicje: przestrzeń R3: zbiór uporządkowanych trójek ℝ3 = {(,,): ,, ℝ} interpretowanejako:
1) Zbiór punktów przestrzeni P = (x, y, z)
2) Zbiór wektorów zaczepionych
⃗ = ⃗ w punkcie O(0,0,0) i końcu w P(x,y,z)
wektor zerowy 0⃗ =(0,0,0) wektor przeciwny – ⃗ = (− , −, −) 3) Zbiór wszystkich wektorów swobodnych w przestrzeni ⃗ (tu u przyjmujemy jako zbiór
wszystkich wektorów zaczepionych w różnych punktach ale o tym samym kierunku, zwrociei długości co wektor ⃗ )
Wersor: wektor o długości 1. Wersory osi układu OX, OY, OZ oznaczamy odpowiednio jako, ̂, Punkty współliniowe: punkty A, B, C w ℝ3 gdy istnieje prosta, do której należą te punkty. Punkty współpłaszczyznowe: punkty K, L, M, N w ℝ3 gdy istnieje płaszczyzna do której należąte punkty.
Wektory współliniowe (wektory równoległe): wektory
⃗ , gdy istnienie prosta w której
zawarte są te wektory ozn. ⃗ ∥ 0⃗ jest równoległy do każdego wektora wektory ⃗ , są równoległe gdy istnieją liczby , ∈ ℝ nie równe równocześnie zero
takie, że + ⃗ = 0⃗ lub dla ⃗ ≠ 0, gdy istnieje takie , że =⃗ Wektory współpłaszczyznowe: ⃗ , , ⃗ gdy istnieje płaszczyzna w której zawarte są tewektory.
0⃗ i dwa dowolne wektory są współpłaszczyznowe wektory ⃗ , ,⃗ ⃗ są współpłaszczyznowe gdy istnieją liczby , , ∈ ℝ nie równe
równocześnie zero takie, że + ⃗ + ⃗ = 0⃗ lub dla ⃗ ∦ , gdy istnieje takie , , że⃗ = ⃗ +
iloczyn mieszany jest równy 0. Obliczanie współrzędnych wektora =⃗ = ( − ; − ; − ) Długość wektora || = ⃗ = √ ( − )2 + ( − )2 + ( − )2 Działania na wektorach
Suma wektorów ⃗ + = ( + 2; + 2; + 2) Różnica wektorów ⃗ − = ⃗ + (−) Iloczyn wektora przez liczbę ⃗ = ( ; ) 1. Dodawanie wektorów jest przemienne + ⃗ = ⃗ + 2. Dodawanie wektorów jest łączne ⃗ + ( + ⃗ ) = (⃗ + ) + ⃗ 3. Wektor
0⃗ jest elementem neutralnym dodawania
⃗ + 0⃗ = ⃗
4.
Wektor – ⃗ jest elementem przeciwnym do wektora ⃗ ⃗ + (−⃗ ) = 0⃗ 5. 1 jest elementem neutralnym mnożenia przez liczbę ⃗ ∙ 1 = ⃗ 6. ()⃗ = (⃗ ) 7. (+⃗)=+⃗ 8. (+)=+
Iloczyn skalarny ⃗ ° ⃗°= 2 + 2 + 2 ⃗ ° = |||| α – kąt pomiędzy wektorami u, v
∡(⃗ , ⃗ ) = ⃗ °⃗|||| - wzór na kąt pomiędzy wektorami ⃗ ⊥ ⟺ ⃗ ° = 0 - warunek prostopadłości
⃗ , , ⃗ ∈ ℝ 3 Wektory swobodne , ∈ ℝ
⃗ = (,,) ⃗ = ( , , ) =(2, 2, 2)
⃗ , , ⃗ ∈ ℝ 3 Wektory swobodne , ∈ ℝ
⃗ = ( , , ) =(2, 2, 2)
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
22/24
K K K AAAR R R TTTAAA WWWZZZOOOR R R ÓÓÓWWW --- AAALLLGGGEEEBBBR R R AAA III GGGEEEOOOMMMEEETTTR R R IIIAAA
GGEEOOMMEETTR R IIAA AA N NAALLIITTYYCCZZ N NAA
http://mathinsight.org
Rzuty wektorów 1. rzut prostokątny sumy wektorów ⃗ , jest równy sumie rzutów tych wektorów 2. Rzut prostokątny iloczynu wektora przez liczbę jest równy iloczynowi liczby i rzutu
wektora.
3. Rzut wektora
⃗ = (,,) na oś układu Ox ma współrzędne
′⃗ = (,0,0), rzut wektora
na płaszczyznę układu xOz ′′⃗ = (,,0) (analogicznie dla pozostałych osi i płaszczyznukładu) 4. Rzut pr. wektora u na wektor v : ′⃗ = ⃗ °⃗|⃗ | 5. Rzut pr. wektora u na płaszczyznę rozpiętą na wektorach v1, v2:
′⃗ = ⃗° ⃗|⃗ |2 ⃗ +⃗° 2⃗|2⃗ |2 2⃗
Iloczyn wektorowy ⃗ × ⃗ , - wektory niewspóliniowe, wynikiem iloczynu wektorowego jest wektor
prostopadły do
⃗ , (zwrot zgodnie z regułą prawej dłoni)
⃗ × = ⃗ = 2 2 2 |⃗ | = |⃗ × | = ||||, - długość wektora w jest równa polu równoległoboku
rozpiętego na wektorach ⃗, ⃗ × = 0 ⟺ ⃗ ∥ ⟺ ⃗ = - warunek równoległości wektorów ⃗ × = − ⃗ × ⃗ ()⃗ × = ( ⃗ × ) ⃗ × ( + ⃗ ) = ⃗ × + ⃗ × ⃗ ⃗ × ⃗ = 0
Iloczyn mieszany (⃗ × )°⃗ = (⃗ , , ⃗ ) 1. (⃗ × )°⃗ = = 2 2 23 3 3 2. Objętości równoległościanu rozpiętego na wektorach ⃗ , , ⃗ jest równa = |(⃗ × )°⃗ | 3. Objętość czworościanu rozpiętego na wektorach ⃗ , , ⃗ jest równa = 6 (⃗ × )°⃗ 4. Trójka wektorów leży w jednej płaszczyźnie jeżeli ich iloczyn mieszany jest równy 0.
⃗ , , ⃗ ∈ ℝ 3 Wektory swobodne , ∈ ℝ
l dowolna
prosta w ℝ3
⃗ = ( , , ) =(2, 2, 2) α - kąt pomiędzy
wektorami ⃗ , k∈ ℤ
Własności:
⃗ = ( , , ) =(2, 2, 2) ⃗ = ( 3, 3, 3)
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
23/24
-
8/15/2019 Na Zaliczenie - Kochman - Algebra
24/24
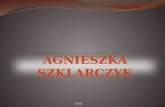
Rzut ukośny punktu P na prostą l (płaszczyznę π) w kierunku wektora v
Punkt przecięcia prostej l (płaszczyzny π) i prostej k równoległej do wektora v ( wektor
kierunkowy) i przechodzącej przez punkt P
Odległości
Punktu P od płaszczyzny π
(, ) = | + + + |√ + + Płaszczyzn równoległych π1, π2 (, ) = | |√ + + Punktu P od prostej l :
I. Odległość między punktem P a rzutem P’ punktu P na prostą P’
1.
wyznaczyć współrzędne rzutu
2. obliczyć odległość PP’
II. Wzór: (, ) = |(−)×||| Prostych skośnych l 1 i l 2:
Odległość dwóch płaszczyzn równoległych do których należą te proste: ∈ , ∈ ,1. Określić równania płaszczyzn równoległych: , ⊥ ⇒ = × 2. Obliczyć ze wzoru odległość płaszczyzn Dwóch prostych równoległych , prostej równoległej od płaszczyzny:
I. odległość punktu P należącego do prostej od jego rzutu prostokątnego P’ na
drugą prostą (płaszczyznę)
II.
odległość punktów przecięcia prostych i płaszczyzny prostopadłej
Symetria
Punkt P względem punktu S: = ′ Punktu wzg prostej l :
1. wyznaczamy punkt S będący rzutem prostokątnym P na prostą;
2.
znajdujemy punkt symetryczny do P względem S
Punktu P względem płaszczyzny
wyznaczamy punkt S będący rzutem prostokątnym P na płaszczyznę;
znajdujemy punkt symetryczny do P względem S
Kąty
Korzystając ze wzoru na iloczyn skalarny i wektorowy, kąty obliczamy jako kąty pomiędzy
wektorami kierunkowymi i normalnymi odpowiadającymi danym prostym i płaszczyznom:
Kąt pomiędzy prostymi l 1 i l 2: ∡(, ) = ∡(1 , 2 ) = °|||| Kąt pomiędzy płaszczyznami:
∡(, ) = ∡(1 , 2 ) = °||||
Kąt między prostą l i płaszczyzną π: ∡(, ) = ∡( , ) = ×||||
α ϕ
n
v
P 0( x0, y0, z 0): + + + = 0 ∥ : + + + = 0 : + + + = 0
: = + t ∈ ℝ - parametrr 1 - wektor wodzący punktu P 1( x1, y1, z 1)
P’ punkt symetryczny do P