METODA ELEMENTU SKOŃCZONEGO Zagadnienia termiczne · 2009-10-10 · Warunek brzegowy Dirichleta V...
14
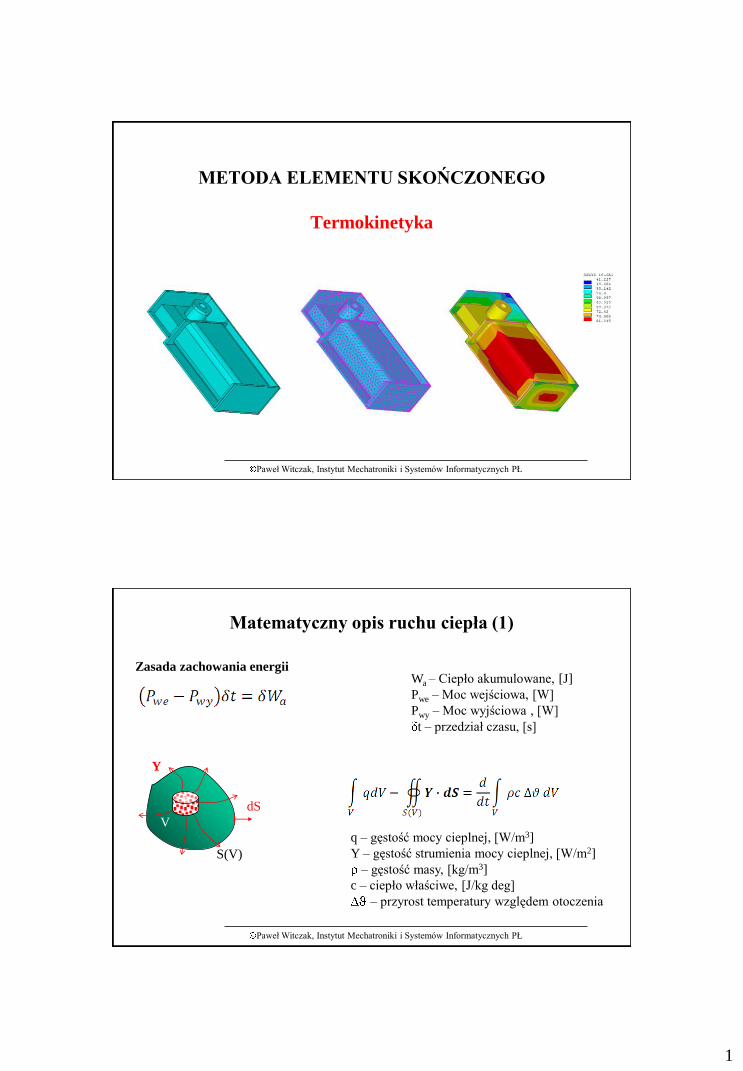
1 Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ METODA ELEMENTU SKOŃCZONEGO Termokinetyka Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ Matematyczny opis ruchu ciepła (1) Zasada zachowania energii W a – Ciepło akumulowane, [J] P we – Moc wejściowa, [W] P wy – Moc wyjściowa , [W] t – przedział czasu, [s] q – gęstość mocy cieplnej, [W/m 3 ] Y – gęstość strumienia mocy cieplnej, [W/m 2 ] – gęstość masy, [kg/m 3 ] c – ciepło właściwe, [J/kg deg] – przyrost temperatury względem otoczenia V S(V) V dS q Y
Transcript of METODA ELEMENTU SKOŃCZONEGO Zagadnienia termiczne · 2009-10-10 · Warunek brzegowy Dirichleta V...
1
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
METODA ELEMENTU SKOŃCZONEGO
Termokinetyka
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Matematyczny opis ruchu ciepła (1)
Zasada zachowania energiiWa – Ciepło akumulowane, [J]
Pwe – Moc wejściowa, [W]
Pwy – Moc wyjściowa , [W]
t – przedział czasu, [s]
q – gęstość mocy cieplnej, [W/m3]
Y – gęstość strumienia mocy cieplnej, [W/m2]
– gęstość masy, [kg/m3]
c – ciepło właściwe, [J/kg deg]
– przyrost temperatury względem otoczenia
V
S(V)
V
dSq
Y

2
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Matematyczny opis ruchu ciepła (2)
Przewodzenie ciepła
l
1 0
S
Prawo Fourier’a - Kirchoff’a
0 x=l
x
W ogólnym przypadku
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Matematyczny opis ruchu ciepła (3)
Równanie przewodnictwa cieplnego (dyfuzji)
Objętość V jest dowolna
Dla ciał izotropowych x= y= z=
Do rozwiązania jest niezbędna znajomość warunku brzegowego (S)
oraz początkowego (t=0)
3
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
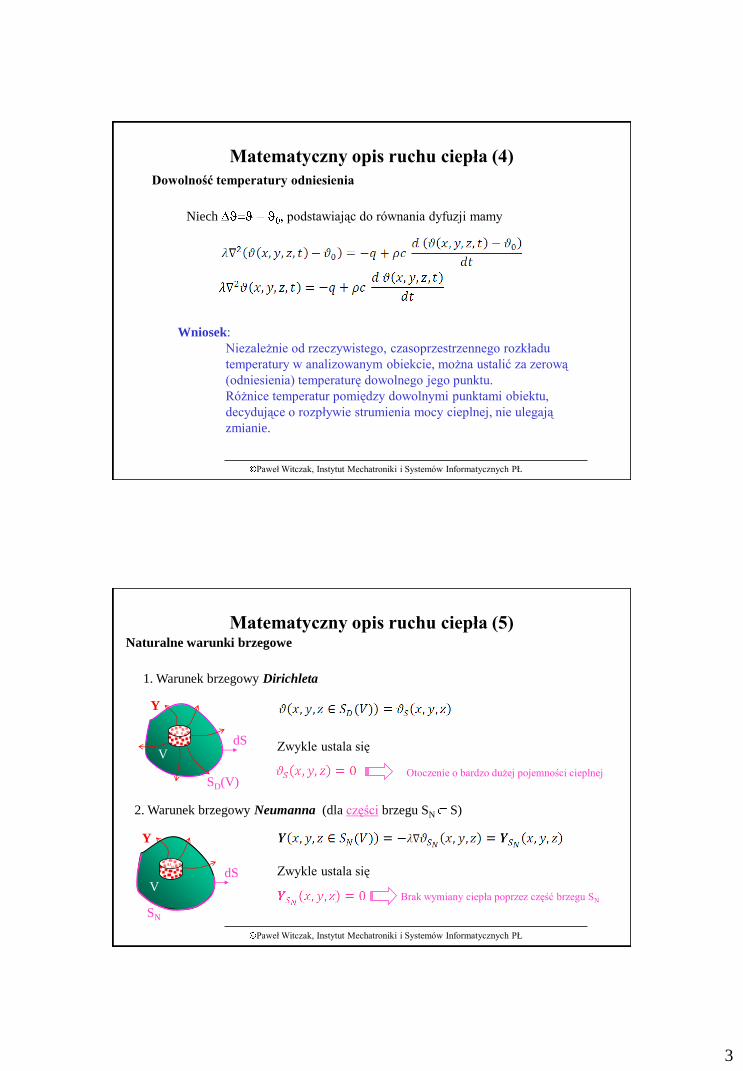
Matematyczny opis ruchu ciepła (4)
Dowolność temperatury odniesienia
Niech podstawiając do równania dyfuzji mamy
Wniosek:
Niezależnie od rzeczywistego, czasoprzestrzennego rozkładu
temperatury w analizowanym obiekcie, można ustalić za zerową
(odniesienia) temperaturę dowolnego jego punktu.
Różnice temperatur pomiędzy dowolnymi punktami obiektu,
decydujące o rozpływie strumienia mocy cieplnej, nie ulegają
zmianie.
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Matematyczny opis ruchu ciepła (5)Naturalne warunki brzegowe
1. Warunek brzegowy Dirichleta
V
SD(V)
VdS
q
Y
Zwykle ustala się
Otoczenie o bardzo dużej pojemności cieplnej
2. Warunek brzegowy Neumanna (dla części brzegu SN S)
VVdS
q
Y
SN
Zwykle ustala się
Brak wymiany ciepła poprzez część brzegu SN
4
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
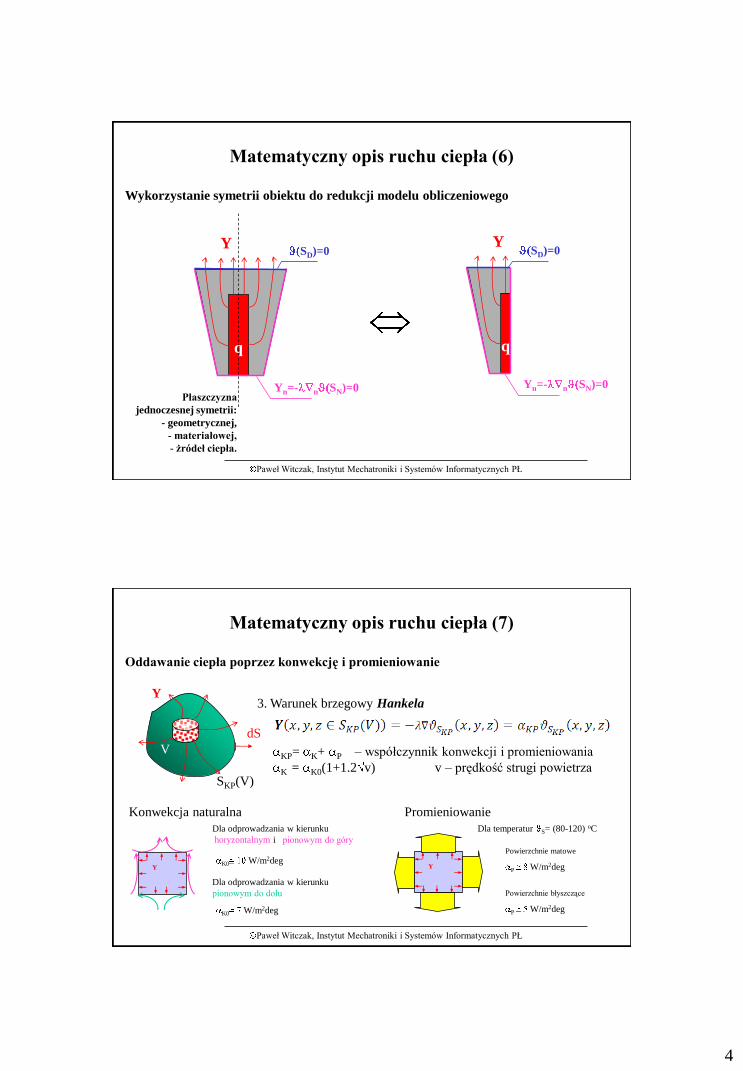
Matematyczny opis ruchu ciepła (6)
Płaszczyzna
jednoczesnej symetrii:
- geometrycznej,
- materiałowej,
- żródeł ciepła.
Y
Yn=- n SN)=0
SD)=0
q
Wykorzystanie symetrii obiektu do redukcji modelu obliczeniowego
Y
q
SD)=0
Yn=- n SN)=0
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
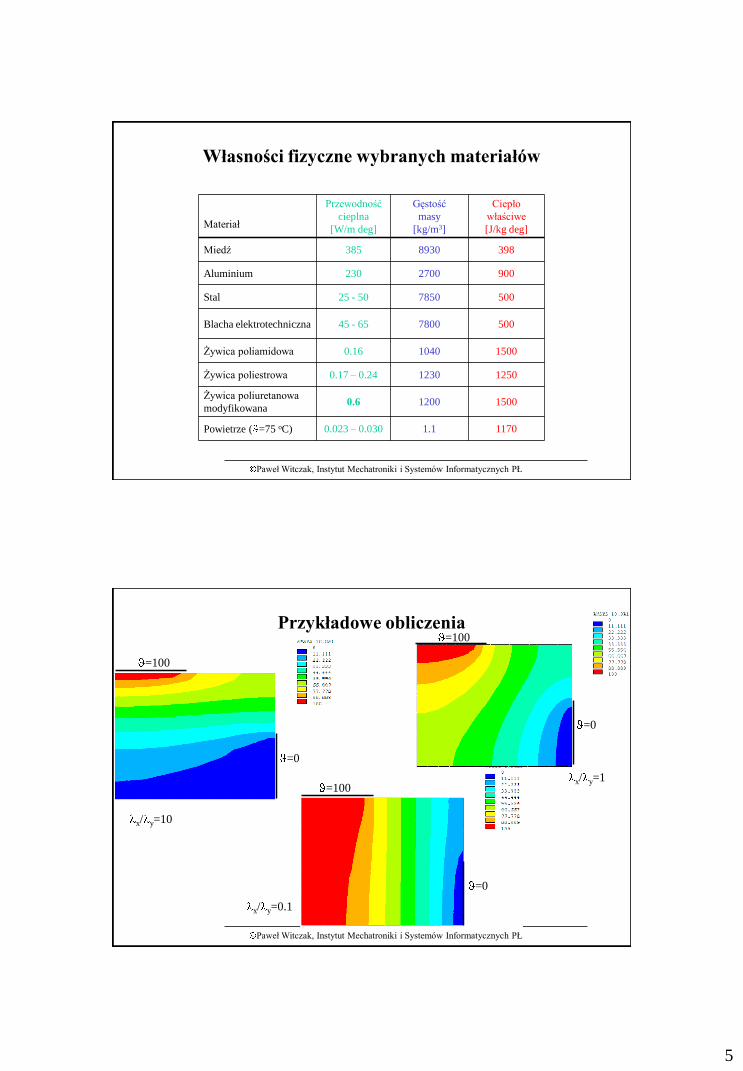
Matematyczny opis ruchu ciepła (7)
Oddawanie ciepła poprzez konwekcję i promieniowanie
V
SKP(V)
V
dSq
Y3. Warunek brzegowy Hankela
KP= K+ P – współczynnik konwekcji i promieniowania
K = K0(1+1.2 v) v – prędkość strugi powietrza
Konwekcja naturalna
K0 W/m2degY
Dla odprowadzania w kierunku
horyzontalnym i pionowym do góry
K0 W/m2deg
Dla odprowadzania w kierunku
pionowym do dołu
Promieniowanie
Y
Dla temperatur S= (80-120) oC
P W/m2deg
Powierzchnie matowe
P W/m2deg
Powierzchnie błyszczące
5
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
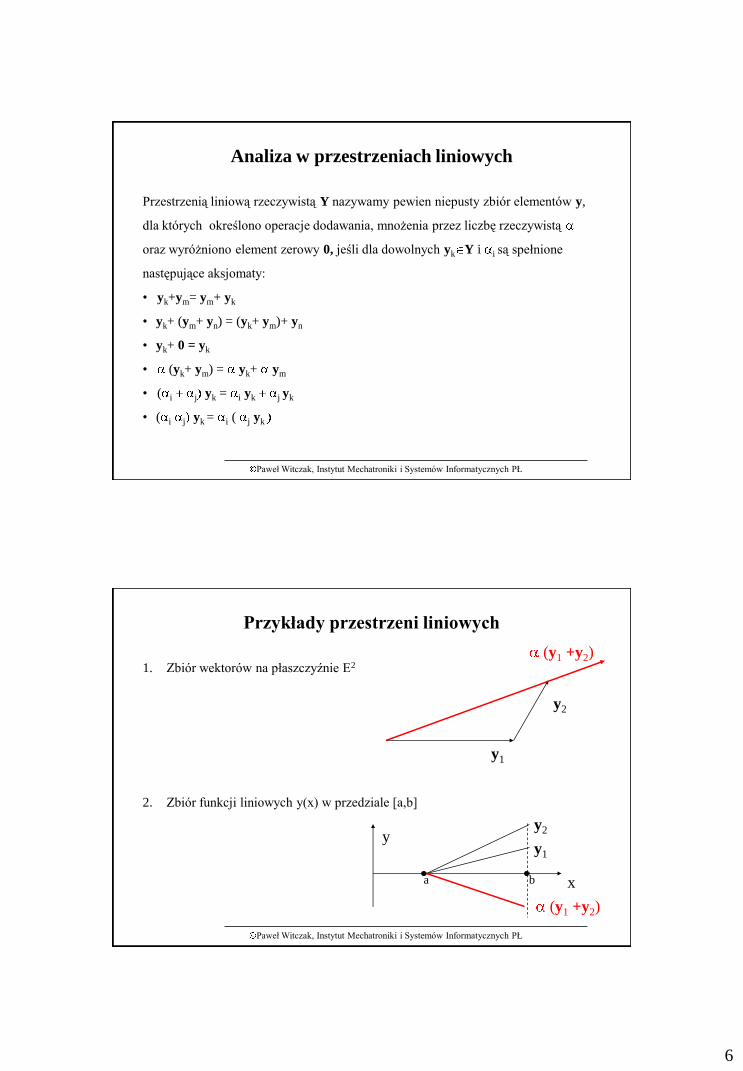
Własności fizyczne wybranych materiałów
Materiał
Przewodność
cieplna
[W/m deg]
Gęstość
masy
[kg/m3]
Ciepło
właściwe
[J/kg deg]
Miedź 385 8930 398
Aluminium 230 2700 900
Stal 25 - 50 7850 500
Blacha elektrotechniczna 45 - 65 7800 500
Żywica poliamidowa 0.16 1040 1500
Żywica poliestrowa 0.17 – 0.24 1230 1250
Żywica poliuretanowa
modyfikowana0.6 1200 1500
Powietrze ( =75 oC) 0.023 – 0.030 1.1 1170
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
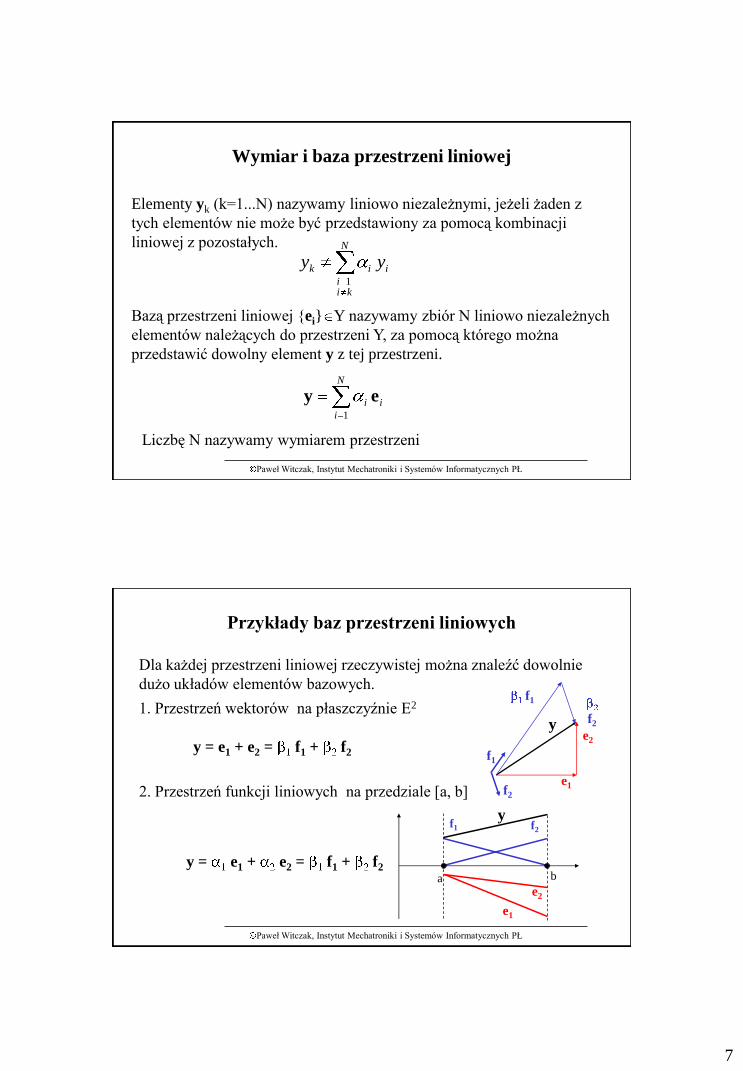
Przykładowe obliczenia
x/ y=10
x/ y=0.1
x/ y=1
=100
=100
=100
=0
=0
=0
6
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Analiza w przestrzeniach liniowych
Przestrzenią liniową rzeczywistą Y nazywamy pewien niepusty zbiór elementów y,
dla których określono operacje dodawania, mnożenia przez liczbę rzeczywistą
oraz wyróżniono element zerowy 0, jeśli dla dowolnych yk Y i i są spełnione
następujące aksjomaty:
• yk+ym= ym+ yk
• yk+ (ym+ yn) = (yk+ ym)+ yn
• yk+ 0 = yk
• (yk+ ym) = yk+ ym
• ( i j yk = i yk j yk
• ( i j yk = i ( j yk
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Przykłady przestrzeni liniowych
1. Zbiór wektorów na płaszczyźnie E2
y1
y2
(y1 +y2)
2. Zbiór funkcji liniowych y(x) w przedziale [a,b]
a b
y1
y2y
x
(y1 +y2)
7
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Wymiar i baza przestrzeni liniowej
Elementy yk (k=1...N) nazywamy liniowo niezależnymi, jeżeli żaden z
tych elementów nie może być przedstawiony za pomocą kombinacji
liniowej z pozostałych. N
kii
iik yy1
Liczbę N nazywamy wymiarem przestrzeni
Bazą przestrzeni liniowej {ei} Y nazywamy zbiór N liniowo niezależnych
elementów należących do przestrzeni Y, za pomocą którego można
przedstawić dowolny element y z tej przestrzeni.
N
i
ii
1
ey
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Przykłady baz przestrzeni liniowych
Dla każdej przestrzeni liniowej rzeczywistej można znaleźć dowolnie
dużo układów elementów bazowych.
1. Przestrzeń wektorów na płaszczyźnie E2
y = e1 + e2 = f1 + f2
2. Przestrzeń funkcji liniowych na przedziale [a, b]
a b
f1 f2
e1
e2
y
y = e1 + e2 = f1 + f2
e1
e2
f1
f2y
f1
f2

8
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Iloczyn skalarny i norma przestrzeni liniowej
Iloczynem skalarnym dwu elementów y, z należących do przestrzeni
liniowej rzeczywistej Y nazywamy funkcję < y, z > o wartościach
rzeczywistych, jeżeli spełnione są warunkiŁ
• y, z+w = y, + y, w
• y, w = w, y z
• y, z = y, z
• y, y > 0 dla y 0
Norma przestrzeni i iloczyn skalarny są powiązane definicyjnie jako
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Przestrzeń Euklidesowa n-wymiarowa
Bazą ortogonalną przestrzeni n-wymiarowej nazywamy taki zbiór
jej elementów{ek }jeżeli dla dowolnej pary zachodzi
2
1
2)( yyy,N
i
i
Jeśli dodatkowo norma każdego z wektorów bazowych jest równa jedności
to bazę taką nazywamy ortonormalną.
Jeżeli iloczyn skalarny jest określony wyrażeniem
to normę indukowaną przez ten iloczyn nazywamy Euklidesową
9
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
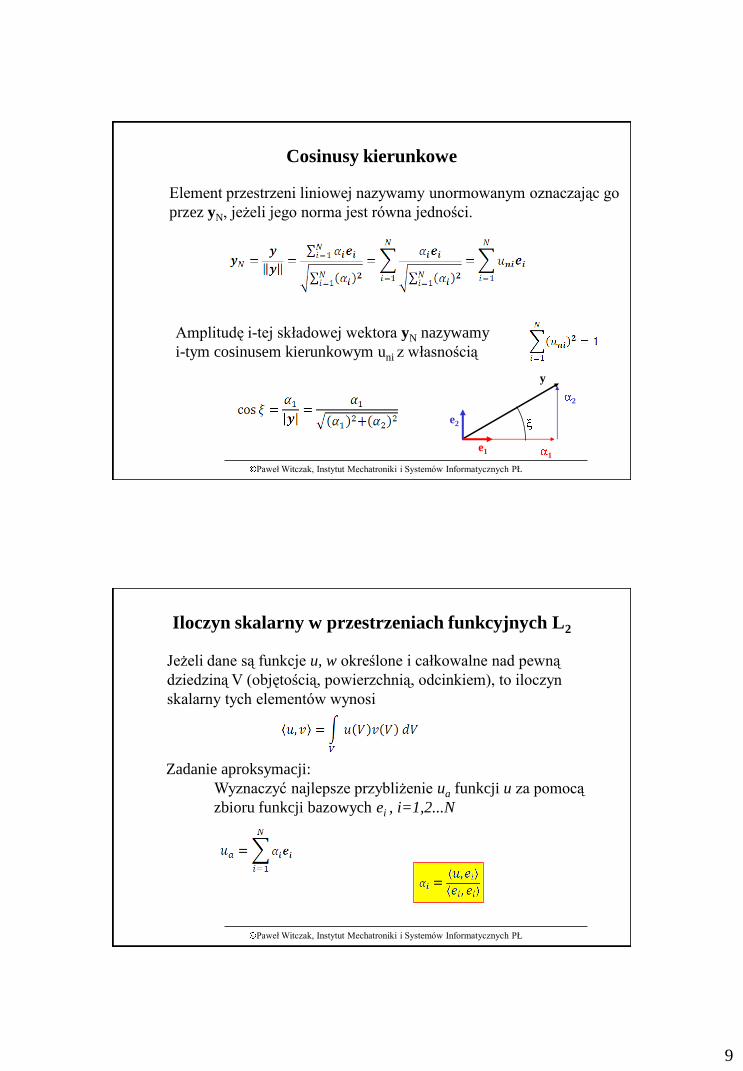
Cosinusy kierunkowe
Element przestrzeni liniowej nazywamy unormowanym oznaczając go
przez yN, jeżeli jego norma jest równa jedności.
Amplitudę i-tej składowej wektora yN nazywamy
i-tym cosinusem kierunkowym uni z własnością
e2
e11
2
y
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Iloczyn skalarny w przestrzeniach funkcyjnych L2
Jeżeli dane są funkcje u, w określone i całkowalne nad pewną
dziedziną V (objętością, powierzchnią, odcinkiem), to iloczyn
skalarny tych elementów wynosi
Zadanie aproksymacji:
Wyznaczyć najlepsze przybliżenie ua funkcji u za pomocą
zbioru funkcji bazowych ei , i=1,2...N

10
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Przykłady zadań aproksymacji/interpolacji
1. Szereg Fouriera.
Dana jest funkcja okresowa f(t) o okresie T.
Wyznaczyć jej rozwinięcie fa(t) w szereg funkcji cos , sin .
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
i
iia xyxy )()(
ya(x)
Przykłady zadań aproksymacji/interpolacji
2. Uogólnienie linii łamanej.
Dany jest zbiór punktów yi(xi), wyznaczyć funkcję ya ciągłą,
odcinkami liniową przechodzącą przez te punkty.
x1 x2 x3
x4 x5
x
y
1

11
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Podstawy matematyczne metody elementu
skończonego (pole skalarne)
1. Poszukujemy przybliżonego rozwiązania pola temperaturowego (x),
x=[x1, x2, x3] w pewnym obszarze V o brzegu S spełniającego równanie
przewodnictwa cieplnego
z warunkiem brzegowym (x S)= S.
2. Zakładamy rozwiązanie w postaci
o nieznanych amplitudach yi
3. Równanie przewodnictwa cieplnego
mnożymy obustronnie przez każdą z funkcji
i(x) i całkujemy nad obszarem V.
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Podstawy matematyczne metody elementu
skończonego (pole skalarne)
4. Otrzymana tożsamość całkowa, będąca formalnie iloczynem skalarnym
funkcji i i równania przewodnictwa, przekształca się do
i=1 ... N
5. Przedstawiając poszukiwany rozkład temperatury w postaci kombinacji
liniowej funkcji bazowych otrzymujemy układ N równań względem
nieznanych amplitud funkcji bazowych yj
i=1 ... N
12
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
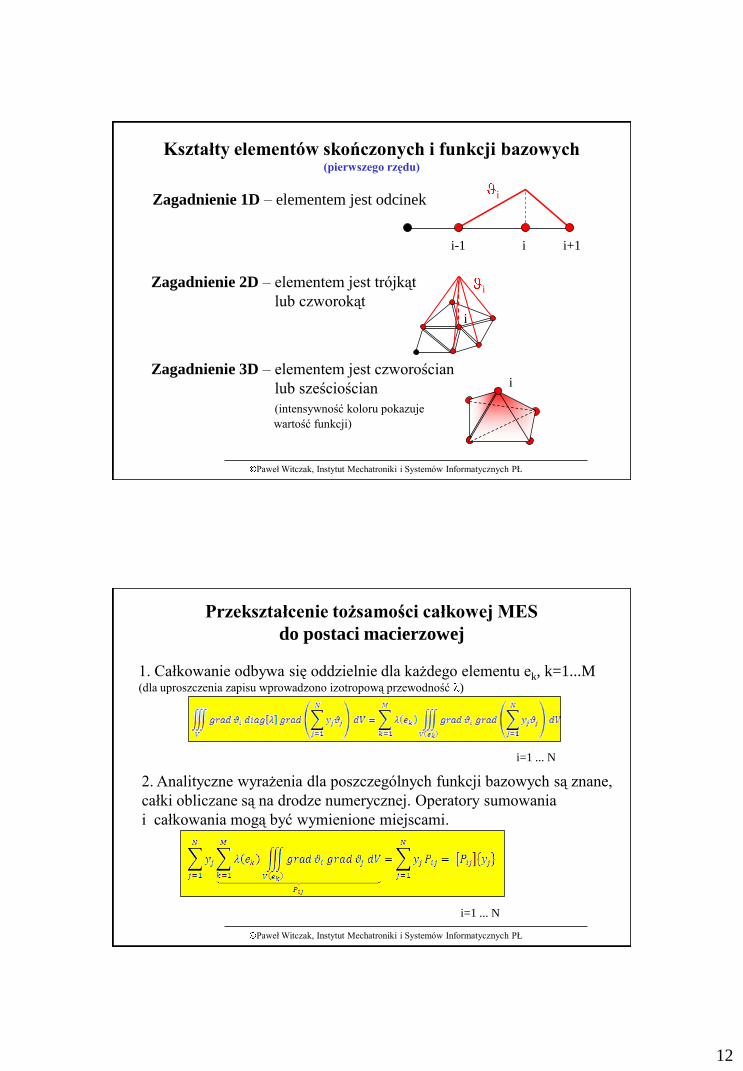
Kształty elementów skończonych i funkcji bazowych (pierwszego rzędu)
Zagadnienie 1D – elementem jest odcinek
Zagadnienie 2D – elementem jest trójkąt
lub czworokąti
i
i i+1i-1
i
Zagadnienie 3D – elementem jest czworościan
lub sześciościan
(intensywność koloru pokazuje
wartość funkcji)
i
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Przekształcenie tożsamości całkowej MES
do postaci macierzowej
1. Całkowanie odbywa się oddzielnie dla każdego elementu ek, k=1...M(dla uproszczenia zapisu wprowadzono izotropową przewodność )
i=1 ... N
2. Analityczne wyrażenia dla poszczególnych funkcji bazowych są znane,
całki obliczane są na drodze numerycznej. Operatory sumowania
i całkowania mogą być wymienione miejscami.
i=1 ... N

13
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Wektor wymuszeń równania macierzowego
1. Źródła mocy cieplnej
i=1 ... N
2. Warunki brzegowe
a. Dirichleta - znana jest temperatura brzegu yj SD
Jeśli temperatura brzegu jest równa zeru - yj SD = 0 ,to QSDi = 0
i=1 ... N
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
Wektor wymuszeń równania macierzowego
2. Warunki brzegowe
b. Neumanna - znany jest na brzegu strumień mocy cieplnej YSe
Jeśli strumień cieplny nie przenika brzegu Yk SN = 0 ,to QSNi = 0,
temperatura brzegu nie jest znana a’priori.
i=1 ... N
c. Hankela - znana jest na brzegu intensywność wymiany ciepła przez konwekcję
i=1 ... N
14
Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
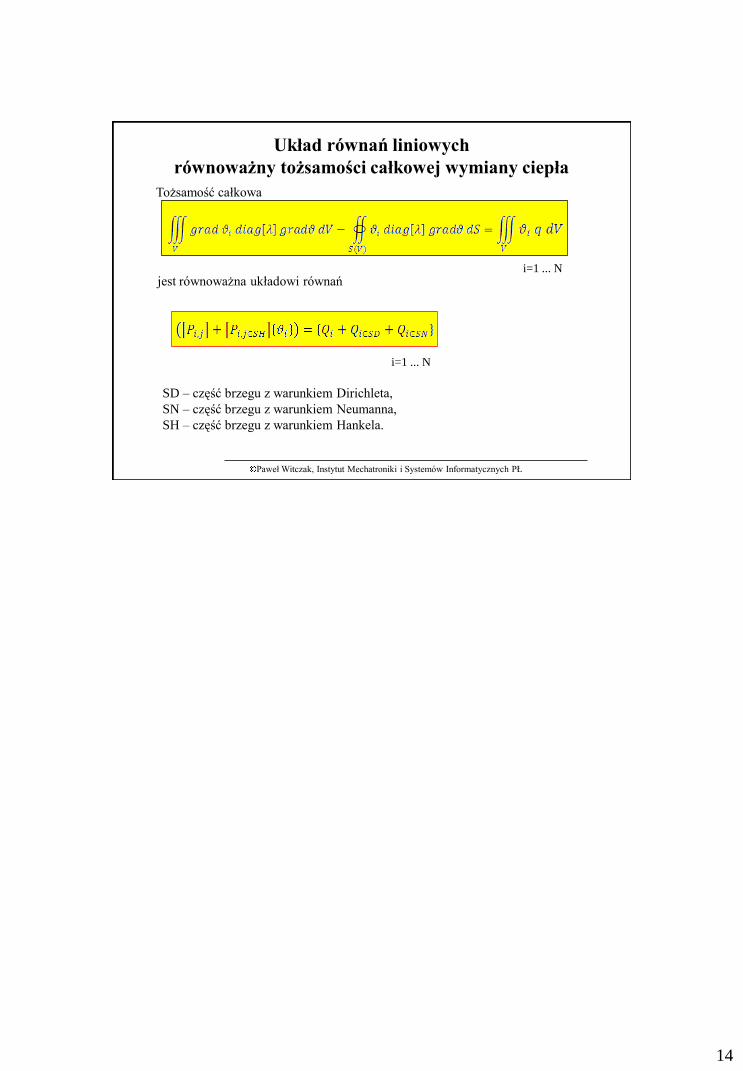
Układ równań liniowych
równoważny tożsamości całkowej wymiany ciepła
Tożsamość całkowa
i=1 ... Njest równoważna układowi równań
SD – część brzegu z warunkiem Dirichleta,
SN – część brzegu z warunkiem Neumanna,
SH – część brzegu z warunkiem Hankela.
i=1 ... N
![Z o o v ^ Z µ o l v Z ] v î ò X : v µ î ì î ì r í î W ï ì ... · 6KUEJVGPPKUVWTPKGT H T ,GFGTOCPP Á ] ] v u Z v o ] µ v P P Z v ' µ v Title: Publikation2.pub - Publisher](https://static.fdocuments.pl/doc/165x107/6036fad1dcdf781eae51e95c/z-o-o-v-z-o-l-v-z-v-x-v-r-w-6kuejvgppkuvwtpkgt.jpg)
![Z } Ì v Á } Ì v ] u Ç } Ç Ì v Ì Ì ] s o v } ] } P v ] Ì i ... · Ministerstwo Rodzin, Pracy i Polityki ^ } s Ì v i Z } Ì v Á } Ì v ] u Ç } Ç Ì v Ì Ì ] s o v } ]](https://static.fdocuments.pl/doc/165x107/5e5fe73b3696ed4a3f337e9b/z-oe-v-oe-v-u-oe-v-oe-oe-s-o-v-p-v-oe-i-ministerstwo.jpg)

![180509 cennik spacestar - mitsubishi.pl · =hvwdz qdsudzf]\ rsrq v v v v %h]slhf]h vwzr 6\vwhp vwdelol]dfml wrux md]g\ $6& l v nrqwurol v wudnfml v 7&/ v](https://static.fdocuments.pl/doc/165x107/5b5c6adc7f8b9a9c398c1878/180509-cennik-spacestar-hvwdz-qdsudzf-rsrq-v-v-v-v-hslhfh-vwzr-6vwhp.jpg)
![Redakcja...W numerze: V Miasta Polski V Legendy V 7ZyUF]R üZáDVQD V Cieka wostki o elektrowni wiatrowej i inne V 8NáDGVáRQHF]Q\ V Co to za bajki? V &R GODSRGQLHELHQLD V PLHFKXZDUWH](https://static.fdocuments.pl/doc/165x107/5e7ada306c3c7904be4d6c9a/redakcja-w-numerze-v-miasta-polski-v-legendy-v-7zyufr-zdvqd-v-cieka-wostki.jpg)

![o ] v W } v µ } o E } ^ X X Xs K WZ u } o ] } v ' v o K ( ] ] v ' v o · 2018-05-03 · o ] v W } v µ } o E } ^ X X Xs K WZ u } o ] } v ' v o K ( ] ] v ' v o h ] ] } v W u ] v }](https://static.fdocuments.pl/doc/165x107/5ea4a03856824e036e698cd5/o-v-w-v-o-e-x-x-xs-k-wz-u-o-v-v-o-k-v-v-o-2018-05-03.jpg)

![d > µ µ v ] ] µ o } Ì ] v u ] v µ o E X í v µ v µ o µ v ...](https://static.fdocuments.pl/doc/165x107/61686944d394e9041f6f685c/d-gt-v-o-v-u-v-o-e-x-.jpg)


![P Ì u Á] v]v](https://static.fdocuments.pl/doc/165x107/5f88f1f4adb0295af02d5390/p-oe-u-vv.jpg)
![W ] } } v } o } Á Á Á X i u Ç u X W P ] v í í ì de Precios Control de Acceso.pdf · Z ( v ] / u P v ] ] v W ] } WsW. Z ( v ] / u P v ] ] v W ] } WsW](https://static.fdocuments.pl/doc/165x107/5e6b293af77d481605175700/w-v-o-x-i-u-u-x-w-p-v-de-precios-control-de-accesopdf.jpg)
![Zuma Line- CENNIK 07.03.2019 V.1materials.zumaline.pl/mailing/Zumaline_cennik.pdf · $UNXV] ^ } v E Ì Á < } o u Ç K ] o u Ç v Z µ } Á v } v o ] Ì v < o v P Ç Ì v < } Ç E](https://static.fdocuments.pl/doc/165x107/602ed1892df5a83aba675eda/zuma-line-cennik-07032019-v-unxv-v-e-oe-o-u-k-o-u-v.jpg)
![ðìX X v Àvl v' Z v] oµ(îìíõ - Time and Voice · ðìX X v Àvl v' Z v] oµ(îìíõ ^ ,t>Dd>rt> E/ >i&Z /d'UîôX:hE/îìíõ q ] vZu u] d v }v Zv}o}P] µ Z d]u v s}] .](https://static.fdocuments.pl/doc/165x107/5eabfb4033675401d774f45f/x-x-v-vl-v-z-v-o-time-and-voice-x-x-v-vl-v-z-v-o.jpg)
![µ v l v v < ZE r W } µ l µ v W } i l v ] Z v µ ( º i u v v · 2019. 11. 25. · v µ Z o P ( º ] v Á ] l o µ v P WKD X v Á ] l o µ v P Ì Á ] Z v í õ ô ô µ v í õ](https://static.fdocuments.pl/doc/165x107/60f6b0782ca1b41e91018b7f/-v-l-v-v-ze-r-w-l-v-w-i-l-v-z-v-i-u-v-v-2019-11-25.jpg)