Mecatrónica - tu-chemnitz.de · diámetro de la caja, el rango de operación del sensor y la zona...
11
Mecatrónica Módulo 6: Sistemas y funciones de la mecatrónica Libro de Texto (Concepto) Jerzy Jędrzejewski Wojciech Kwaśny Zbigniew Rodziewicz Andrzej Błażejewski Universidad Técnica de Wroclaw, Polonia Proyecto ampliado de transferencia del concepto europeo para la calificación agregada de la Mecatrónica las fuerzas especializadas en la producción industrial globalizada Proyecto EU Nr. 2005-146319 „MINOS“, Plazo: 2005 hasta 2007 Proyecto EU Nr. DE/08/LLP-LdV/TOI/147110 „MINOS**“, Plazo: 2008 hasta 2010 El presente proyecto ha sido financiado con el apoyo de la Comisión Europea. Esta publicación (comunicación) es responsabilidad exclusiva de su autor. La Comisión no es responsable del uso que pueda hacerse da la información aquí difundida. www.minos-mechatronic.eu
Transcript of Mecatrónica - tu-chemnitz.de · diámetro de la caja, el rango de operación del sensor y la zona...

Mecatrónica Módulo 6: Sistemas y funciones de la mecatrónica Libro de Texto (Concepto) Jerzy Jędrzejewski Wojciech Kwaśny Zbigniew Rodziewicz Andrzej Błażejewski Universidad Técnica de Wroclaw, Polonia Proyecto ampliado de transferencia del concepto europeo para la calificación agregada de la Mecatrónica las fuerzas especializadas en la producción industrial globalizada Proyecto EU Nr. 2005-146319 „MINOS“, Plazo: 2005 hasta 2007 Proyecto EU Nr. DE/08/LLP-LdV/TOI/147110 „MINOS**“, Plazo: 2008 hasta 2010 El presente proyecto ha sido financiado con el apoyo de la Comisión Europea. Esta publicación (comunicación) es responsabilidad exclusiva de su autor. La Comisión no es responsable del uso que pueda hacerse da la información aquí difundida. www.minos-mechatronic.eu
Colaboradores en la elaboración y aprobación del concepto conjunto de eseñanza:
Technische Universität Chemnitz, Institut für Werkzeugmaschinen und Produktionsprozesse, Deutschland – Projektleitung
Corvinus Universität Budapest, Institut für Informationstechnologien, Ungarn
Universität Stockholm, Institut für Soziologie, Schweden
Technische Universität Wroclaw, Institut für Produktionstechnik und Automatisierung, Polen
Henschke Consulting Dresden, Deutschland
Christian Stöhr Unternehmensberatung, Deutschland
Neugebauer und Partner OHG Dresden, Deutschland
Korff Isomatic sp.z.o.o. Wroclaw, Polen
Euroregionale Industrie- und Handelskammer Jelenia Gora, Polen
Dunaferr Metallwerke Dunajvaros, Ungarn
Knorr-Bremse Kft. Kecskemet, Ungarn
Nationales Institut für berufliche Bildung Budapest, Ungarn
IMH, Spanien
VUT Brno, Tschechische Republik
CICmargune, Spanien
University of Naples, Italien
Unis, Tschechische Republik
Blumenbecker, Tschechische Republik
Tower Automotive, Italien
Bildungs-Werkstatt gGmbH, Deutschland
VEMAS, Deutschland
Concepto conjunto de enseñanza: Libro de texto, libro de ejercicios y libro de soluciones Módulo 1-8: Fundamentos / Competencia intercultural y administración de proyectos / Técnica de fluidos / Accionamiento y mandos eléctricos / Componentes mecatrónicos / Sistemas y funciones de la mecatrónica / La puesta en marcha, seguridad y teleservicio / Mantenimiento y diagnóstico Módulo 9-12: Prototipado Rápido/ Robótica/ Migración Europea/ Interfaces Todos los módulos están disponibles en los siguientes idiomas: Alemán, Inglés, español, italiano, polaco, checo, húngaro Más Información Dr.-Ing. Andreas Hirsch Technische Universität Chemnitz Reichenhainer Straße 70, 09107 Chemnitz, Deutschland Tel: + 49(0)371 531-23500 Fax: + 49(0)371 531-23509 Email: [email protected] Internet: www.tu-chemnitz.de/mb/WerkzMasch oder www.minos-mechatronic.eu

Sistemas y funciones de la mecatrónica
7
Minos
1 Sensores inductivos
Los sensores inductivos son el grupo de sensores más utilizado en sistemas automáticos para el control de posición y movimiento de mecanismos utilizados como parte de la maquinaria y del equipo. Su diseño simple y compacto, además de su rentabilidad y su fácil instalación lo hacen la elección perfecta para muchas aplicaciones.
Los sensores inductivos reaccionan a cualquier objeto metálico en su zona de operación al activar de el estado de conexión de salida o al momento de cambio en el nivel de señal de la conexión de salida.
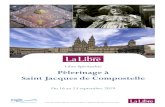
Un sensor inductivo consiste de los siguientes componentes básicos (Figura 1.1.): una cabeza que incluye una bobina inductora con un núcleo de ferrita, un generador con un voltaje sinusoidal, un circuito detector (comparador) y un amplificador de salida
Un circuito de inducción que consiste de una bobina y de un núcleo de ferrita genera una variable , un campo magnético de alta frecuencia alrededor de la cara del sensor. Este sensor induce corrientes de Foucault en un objeto metálico que se acerca al sensor. Esto provoca una carga al circuito de inducción y como resultado una disminución de la amplitud de las oscilaciones. La magnitud de estos cambios depende de la distancia entre el objeto metálico y la cara del sensor. La activación de la salida del sensor sigue después de que el objeto metálico haya llegado hasta cierta distancia del sensor; dicha distancia depende de las características individuales de cada sensor. En los sensores de salida análoga, el nivel de la señal de salida es en proporción inversa a una distancia del objeto hacia el sensor.
1.1 Información básica
Figura 1.1: Esquema de un sensor inductivo
Objeto Cabeza del sensor
Generador Sistema de detección
Sistema de sálida
Sistemas y funciones de la mecatrónica
8
Minos
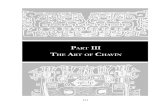
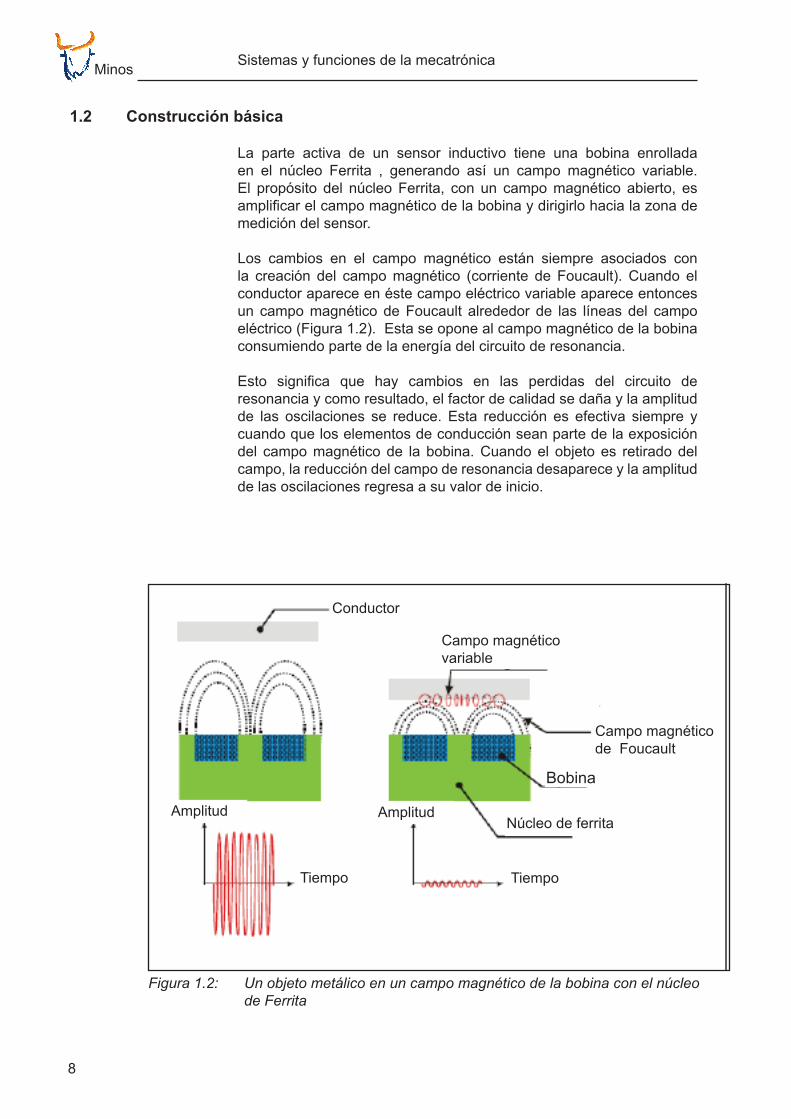
La parte activa de un sensor inductivo tiene una bobina enrollada en el núcleo Ferrita , generando así un campo magnético variable. El propósito del núcleo Ferrita, con un campo magnético abierto, es amplificar el campo magnético de la bobina y dirigirlo hacia la zona de medición del sensor.
Los cambios en el campo magnético están siempre asociados con la creación del campo magnético (corriente de Foucault). Cuando el conductor aparece en éste campo eléctrico variable aparece entonces un campo magnético de Foucault alrededor de las líneas del campo eléctrico (Figura 1.2). Esta se opone al campo magnético de la bobina consumiendo parte de la energía del circuito de resonancia.
Esto significa que hay cambios en las perdidas del circuito de resonancia y como resultado, el factor de calidad se daña y la amplitud de las oscilaciones se reduce. Esta reducción es efectiva siempre y cuando que los elementos de conducción sean parte de la exposición del campo magnético de la bobina. Cuando el objeto es retirado del campo, la reducción del campo de resonancia desaparece y la amplitud de las oscilaciones regresa a su valor de inicio.
1.2 Construcción básica
Figura 1.2: Un objeto metálico en un campo magnético de la bobina con el núcleo de Ferrita
Conductor
AmplitudNúcleo de ferrita
Bobina
Campo magnético de Foucault
Campo magnético variable
Amplitud
TiempoTiempo
Sistemas y funciones de la mecatrónica
9
Minos
El circuito electrónico del sensor determina una distancia del objeto hacia el sensor, basado en el índice de reducción de la amplitud y genera una señal de salida. Es su mayoría es una señal de dos estados: el objeto que se encuentra al alcance del sensor y el objeto que se encuentra fuera del alcance del sensor. Rara vez la señal es una señal análoga; en una proporción inversa a una distancia del objeto al sensor.
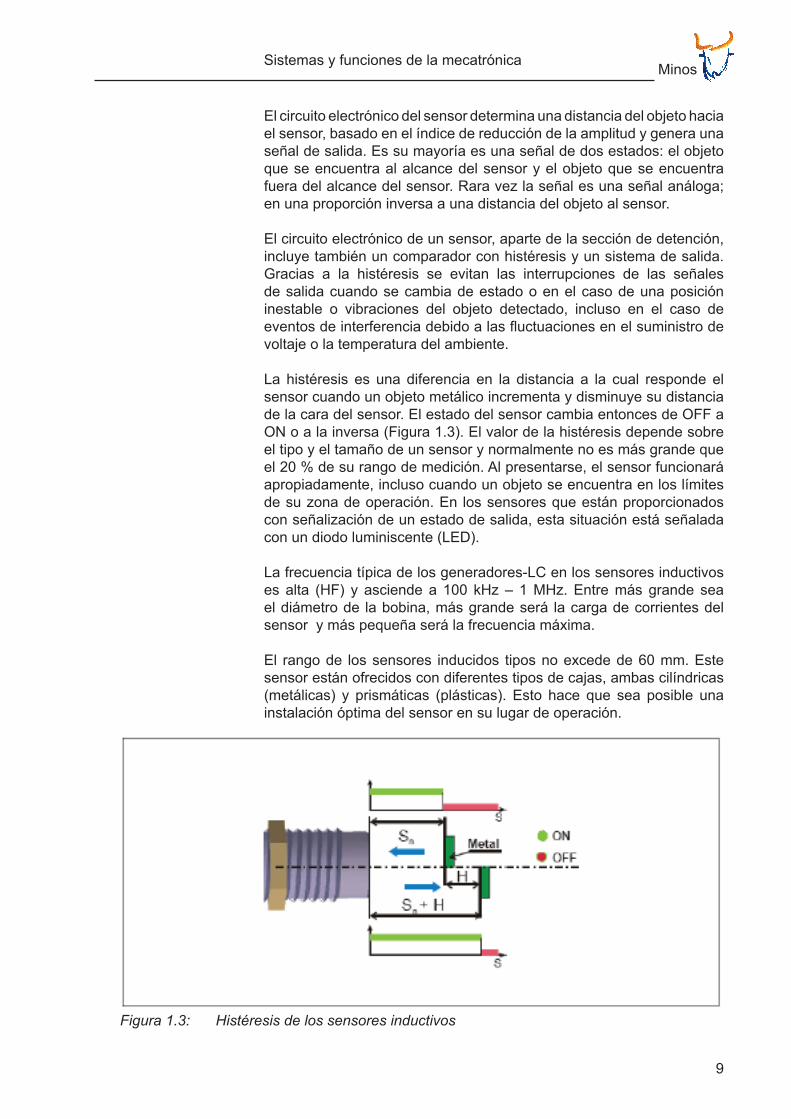
El circuito electrónico de un sensor, aparte de la sección de detención, incluye también un comparador con histéresis y un sistema de salida. Gracias a la histéresis se evitan las interrupciones de las señales de salida cuando se cambia de estado o en el caso de una posición inestable o vibraciones del objeto detectado, incluso en el caso de eventos de interferencia debido a las fluctuaciones en el suministro de voltaje o la temperatura del ambiente.
La histéresis es una diferencia en la distancia a la cual responde el sensor cuando un objeto metálico incrementa y disminuye su distancia de la cara del sensor. El estado del sensor cambia entonces de OFF a ON o a la inversa (Figura 1.3). El valor de la histéresis depende sobre el tipo y el tamaño de un sensor y normalmente no es más grande que el 20 % de su rango de medición. Al presentarse, el sensor funcionará apropiadamente, incluso cuando un objeto se encuentra en los límites de su zona de operación. En los sensores que están proporcionados con señalización de un estado de salida, esta situación está señalada con un diodo luminiscente (LED).
La frecuencia típica de los generadores-LC en los sensores inductivos es alta (HF) y asciende a 100 kHz – 1 MHz. Entre más grande sea el diámetro de la bobina, más grande será la carga de corrientes del sensor y más pequeña será la frecuencia máxima.
El rango de los sensores inducidos tipos no excede de 60 mm. Este sensor están ofrecidos con diferentes tipos de cajas, ambas cilíndricas (metálicas) y prismáticas (plásticas). Esto hace que sea posible una instalación óptima del sensor en su lugar de operación.
Figura 1.3: Histéresis de los sensores inductivos

Sistemas y funciones de la mecatrónica
10
Minos
El cambio continuo del campo magnético generado por una bobina inductiva rodea una cierta área limitada que determina el alcance máximo posible de un sensor inductivo.
Una distancia desde la cara del sensor hasta un objeto en donde el circuito de salida se cambia se define como La zona de operación clasificada S n. Este valor es dado en la información de catálogo. Está determinada con acuerdo del EN 60947-5-2 como un estándar para placa cuadrada de acero (st37) con lado del cuadrado equivalente al diámetro del sensor y su ancho igual a 1 mm.
La zona de operación actual S r determinada en el curso de manufacturación de un sensor puede ser ligeramente diferente que la S n . Para el valor clasificado del voltaje suministrado y la temperatura ambiente determinada, la zona actual se encuentra en el rango 0.9 S n ≤ S r ≤ 1.1S n
Para aumentar la fiabilidad del sensor de operación, el rango recomendado es ampliamente reducido al rango de trabajo S a ≤ 0.8 S n .Esto define una distancia segura de un objeto metálico hacia un sensor, asegurando así una operación sin problemas en el rango completo de cambios en la temperatura ambiente y el suministro de voltaje, independientemente del rango de operación actual garantizado por el fabricante.
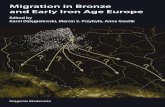
El rango de operación de un sensor S n depende de un diámetro de caja D, en específico, del diámetro de la bobina y las propiedades de centro (figura 1.4). Los sensores que se encuentran en una caja pequeña tienen , por lo tanto, un rango de operación más pequeño que aquellos con una caja más grande. También hay ejecuciones especiales de los sensores con un rango de operación aumentado.
Figura 1.4: La relación entre el diámetro de un sensor y su rango de operación nomial

Sistemas y funciones de la mecatrónica
11
Minos
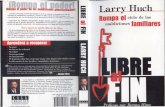
La reducción del circuito de resonancia depende del material que fue hecho el objeto que se sujeta. Los materiales como el oro, cobre o aluminio que producen una conductividad eléctrica más alta que el acero St37disminuye las oscilaciones a un menor grado.
Al cambiar la distancia del objeto hacia el sensor estas diferencias pueden ser compensadas. Esto puede causar una reducción de la zona, en donde es posible detectar el objeto. Por consecuencia, si el materia detectado es latón, entonces el rango de operación S n determinado por un objeto hecho de acero St37 debe de ser modificado multiplicando su coeficiente correccional utilizado para latón igual a 0.5 x S n (Figura 1.5)
El diseño de un sensor influencia también su sensibilidad. Existen dos formas básicas de sensores con una caja cilíndrica:
- Cubierto: La bobina inductiva del circuito de resonancia está insertado en un estuche, el cual forma la frontera del sensor.
- No cubierto: El estuche se encuentra solo en una caja protectora hecha de plástico.
Los sensores con una bobina prominente generan una sensibilidad más alta hacia un objeto detectado, pero al mismo tiempo una sensibilidad más alta a la presencia de otros objetos metálicos alrededor.
1.3 Coeficientes de corrección
Figura 1.5: Coeficientes de corrección para diferentes materiales del objeto detectado
Acero St37
Cromo
OroAluminioLatón
Acero inoxidable

Sistemas y funciones de la mecatrónica
12
Minos
El seguir las recomendaciones de instalación evita que se presente algún problema en la función de los sensores, los cuales podrían ser provocados por el humedecimiento del entorno o la interferencia de otros sensores. El tamaño y la forma de la zona libre requerida en la cercanía del sensor depende de un rango de operación, el diseño y el tamaño del objeto detectado (Figura 1.6a).
El diámetro del centro y de la bobina depende del tamaño de la caja cilíndrica (casquillo metálico) Por ello, hay una fuerte conexión entre el diámetro de la caja, el rango de operación del sensor y la zona libre requerida, donde no puede hacer ningún objeto metálico libre de ser detectado. Los sensores con la bobina cubierta tienen un rango de operación más grande, para ello también tiene que ser más grande la zona libre requerida.
Un sensor con caja cilíndrica cubierta es sensible solo con los objetos de metal que se encuentran frente al sensor, por ello se puede ajustar este sensor a elementos de metal. La zona libre asciende a 3x S n (Figura 1.6b). La distancia mínima entre sensores debe de ser más grande que 2xD, para evitar cualquier posible interferencia entre sí.
Un sensor con caja cilíndrica no cubierta es sensible con los objetos de metal que se encuentran en tres lados. Por ello, se tiene que sacar un poco el sensor así la zona libre incluye también los lados del sensor. En este caso para evitar cualquier tipo de interferencia, la distancia entre sensores debe de ser más grande que 3xD.
1.4 Método de instalación
Figura 1.6: Sensores inductivos con bobina cubierta y no cubierta A) características B) consejos de construcción
Objeto detectado

Sistemas y funciones de la mecatrónica
13
Minos
En los sensores inductivos en forma de anillo, la zona activa se coloca dentro de la caja del anillo del sensor (Figura 1.7a). Estos sensores están diseñados para detectar objetos que pasan a través del orificio de un sensor. Considerando su diseño, estos sensores son utilizados para la detección y conteo de pequeños objetos de metal como tuercas y tornillos, que pasan a través del orificio del sensor. La caja de estos sensores están hechas de plástico.
El modo de acción de sensor de anillo se basa en una oscilación de alta frecuencia que produce un campo magnético en el orificio del sensor. En estos sensores se utilizan núcleos de polvo comprimido de forma toroidal con un valor más alto del factor de calidad que los núcleos de ferrita. La presencia de un objeto metálico activa el sensor causando así una reducción de la amplitud de oscilaciones. Esto se reconoce por medio de un comparador y después de que se ha excedido un umbral, se pulsa entonces el estado de salida. La zona de operación de un sensor depende del diámetro de su orificio y también del tamaño y del tipo del metal detectado.
Para accionar el sensor se necesita de un nivel de reducción determinado de los campos magnéticos. Si los elementos son muy pequeños el nivel de reducción será entonces también muy pequeño. Por consecuencia, para cada tamaño del sensor existe una longitud mínima o diámetro de los objetos detectados que garantiza su operación adecuada (Figura 1.7b)
Una ventaja del sensor de anillo es que un objeto detectado no se tiene que mover a través en la misma trayectoria . La forma de anillo activa la superficie del sensor, lo que hace posible detectar objetos sin importar su orientación en el espacio, por ejemplo, aquellos sometidos a la fuerza de gravedad en un tubo de plástico.
1.5 Tipos especiales de sensores
1.5.1 Sensor inductivo en forma de anillo
Figura 1.7: Sensor inductivo en forma de anillo A) construcción B) relación entre el tamaño del sensor y el tamaño mínimo del objeto detectado
Longitud mínina/Diámetromínimo delobjeto [mm]
Diámetro
Longitud
Diámetro de la apertura del sensor [mm]

Sistemas y funciones de la mecatrónica
14
Minos
Los procesos de soldadura que necesitan de altas corrientes son asociadas con campos magnéticos fuertes. La corriente fluye a través de los conductores eléctricos y del equipo de soldadura, generando alrededor de ellos un campo magnético variable de alta intensidad.
La instalación de un sensor inductivo en esta zona se asocia con un riesgo de una activación no controlada del estado de salida. Esto puede pasar debido a una influencia que tiene este fuerte campo magnético en la intensidad de saturación del centro. Otro impacto negativo de la presencia de estos fuertes campos magnéticos es la inducción de un voltaje adicional en la bobina. Este voltaje adicional interfiere con la operación del oscilador y puede causar una activación accidental del estado de salida. Además, los procesos de soldadura están siempre asociados con un gran número de chispas que pueden debilitar la caja del sensor, especialmente su superficie activa.
Debido a las chispas, los sensores diseñados para operar cerca de un equipo de soldadura están normalmente hechos de latón cubierto con Teflónâ y su superficie frontal está protegida con Duraplast â resistente a altas temperaturas.
Para proteger de una falsa activación, tales sensores deben de ser suministrados con un diseño especial de un circuito electrónico y el núcleo con una permeabilidad magnética (Figura 1.8). Dichos centros , los cuales están hechos de hierro disperso especial y se saturan en un flujo magnético que debe de ser mas denso que en el caso de los núcleos ferrita. Un sensor con tales núcleos es más resistente a los eventos de interferencia externa debido a su mejor concentración y su direccionamiento de su propio campo magnético. Las resistencias más altas a la acción de campos magnéticos externos tienen sensores libres de núcleos. En los sensores tradicionales, el núcleo concentra alrededor de si mismo el magnetismo externo. En estas soluciones, las bobinas están enrolladas alrededor de bobinas hechas de plástico.
1.5.2 Sensores que trabajan en un fuerte campo electromagnético
Figura 1.8: Sensores inductivos, insensibles a fuertes campos magnéticos
Bobina de plástico
Bobina
Núcleo con una reducida permeabilidad magnética

Sistemas y funciones de la mecatrónica
15
Minos
El uso de sensores estándar en ambientes que no cubren los parámetros estándar puede crear problemas operacionales o incluso dañarlos permanentemente.
La adaptación de los sensores a la operación bajo condiciones difíciles requiere usualmente la aplicación de materiales especiales para su caja, un incremento de algunas dimensiones , la preparación de un procedimiento de ensamblaje especial, proveer de buenas condiciones operacionales para los circuitos electrónicos por medio de su protección y/o cambios en el diseño.
Para la adaptación de los productos en cuanto las necesidades, los fabricantes sugieren proponen los siguientes puntos:
- Sensores resistentes a temperaturas arriba de los 200 ºC
- Sensores resistentes a substancias químicas
- Sensores resistentes al aceite
- Sensores para la operación en un ambiente húmedo
- Sensores miniatura con una cabeza de 3mm a 5mm de diámetro
Los sensores que operan bajo condiciones de alta presión deben de ser mas fuertes y ajustados para evitar daños a los componentes electrónicos que están instalados por dentro. La bobina y el núcleo están protegidos por la parte frontal por medio de un disco de cerámica grueso y resistente. Debido a que dichas construcciones estimulan un desplazamiento de las bobinas, la zona de acción del sensor se hará más pequeña. Para evitar este efecto se necesitan hacer modificaciones en el oscilador. Bajo normales circunstancias el oscilador modificado daría un rango de operación mucho más grande que los sensores estándar.
El disco de cerámica estará unido por medio de una conexión térmica con la caja de metal inoxidable. La caja es colocada dentro del disco de cerámica exponiéndola primero a altas temperaturas, al momento de enfriarse, la caja se sujeta alrededor del disco haciendo así, una conexión fuerte y apretada.
1.5.3 Sensores que trabajan en condiciones difíciles