
Leica TS30 · Tryb Traking/SynchroTrack: 3 mm + 1 ppm / zwykle < 0.15 s Tryb uœredniania: 1 mm + 1...
16
Leica TS30 Dane techniczne
Transcript of Leica TS30 · Tryb Traking/SynchroTrack: 3 mm + 1 ppm / zwykle < 0.15 s Tryb uœredniania: 1 mm + 1...

Leica TS30Dane techniczne

2
3
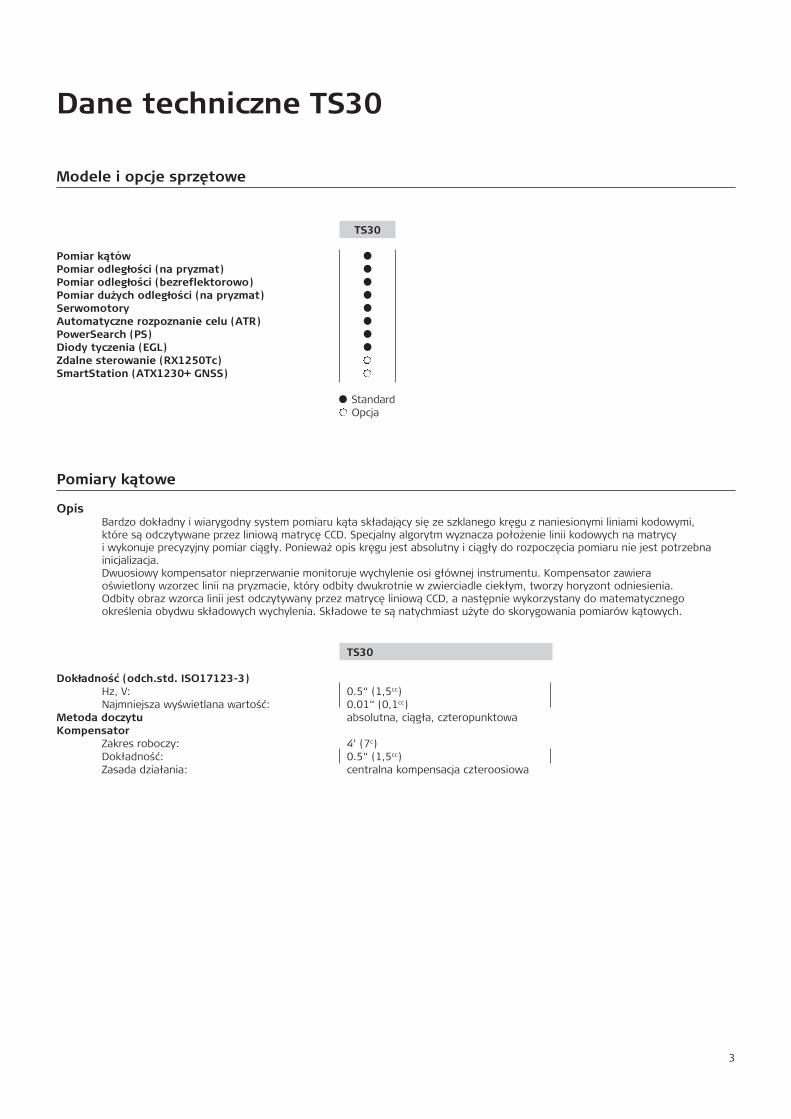
Dane techniczne TS30
Modele i opcje sprzêtowe
TS30
Pomiar k¹tówPomiar odleg³ości (na pryzmat)Pomiar odleg³ości (bezreflektorowo)Pomiar du¿ych odleg³ości (na pryzmat)SerwomotoryAutomatyczne rozpoznanie celu (ATR)PowerSearch (PS)Diody tyczenia (EGL)Zdalne sterowanie (RX1250Tc) SmartStation (ATX1230+ GNSS)
StandardOpcja
Pomiary k¹towe
OpisBardzo dok³adny i wiarygodny system pomiaru k¹ta sk³adaj¹cy siê ze szklanego krêgu z naniesionymi liniami kodowymi, które s¹ odczytywane przez liniow¹ matrycê CCD. Specjalny algorytm wyznacza po³o¿enie linii kodowych na matrycy i wykonuje precyzyjny pomiar ci¹g³y. Poniewa¿ opis krêgu jest absolutny i ci¹g³y do rozpoczêcia pomiaru nie jest potrzebna inicjalizacja.Dwuosiowy kompensator nieprzerwanie monitoruje wychylenie osi g³ównej instrumentu. Kompensator zawiera oœwietlony wzorzec linii na pryzmacie, który odbity dwukrotnie w zwierciadle ciek³ym, tworzy horyzont odniesienia.Odbity obraz wzorca linii jest odczytywany przez matrycê liniow¹ CCD, a nastêpnie wykorzystany do matematycznego okreœlenia obydwu sk³adowych wychylenia. Sk³adowe te s¹ natychmiast u¿yte do skorygowania pomiarów k¹towych.
TS30
Dok³adnośæ (odch.std. ISO17123-3)Hz, V: 0.5“ (1,5cc)Najmniejsza wyœwietlana wartoœæ: 0.01“ (0,1cc)
Metoda doczytu absolutna, ci¹g³a, czteropunktowaKompensator
Zakres roboczy: 4’ (7c)Dok³adnoœæ: 0.5“ (1,5cc)Zasada dzia³ania: centralna kompensacja czteroosiowa
4
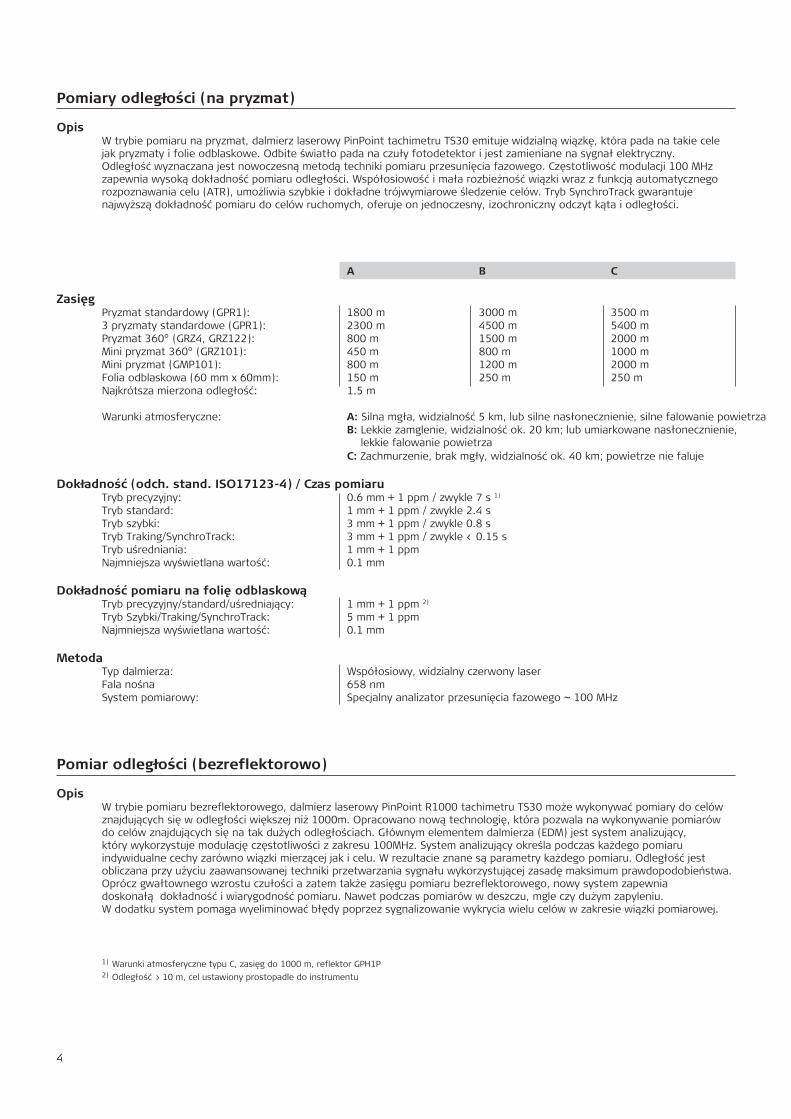
Pomiary odleg³ości (na pryzmat)
OpisW trybie pomiaru na pryzmat, dalmierz laserowy PinPoint tachimetru TS30 emituje widzialn¹ wi¹zkê, która pada na takie cele jak pryzmaty i folie odblaskowe. Odbite œwiat³o pada na czu³y fotodetektor i jest zamieniane na sygna³ elektryczny. Odleg³oœæ wyznaczana jest nowoczesn¹ metod¹ techniki pomiaru przesuniêcia fazowego. Czêstotliwoœæ modulacji 100 MHzzapewnia wysok¹ dok³adnoœæ pomiaru odleg³oœci. Wspó³osiowoœæ i ma³a rozbie¿noœæ wi¹zki wraz z funkcj¹ automatycznego rozpoznawania celu (ATR), umo¿liwia szybkie i dok³adne trójwymiarowe œledzenie celów. Tryb SynchroTrack gwarantuje najwy¿sz¹ dok³adnoœæ pomiaru do celów ruchomych, oferuje on jednoczesny, izochroniczny odczyt k¹ta i odleg³oœci.
CBA
ZasiêgPryzmat standardowy (GPR1): 1800 m 3000 m 3500 m3 pryzmaty standardowe (GPR1): 2300 m 4500 m 5400 mPryzmat 360° (GRZ4, GRZ122): 800 m 1500 m 2000 mMini pryzmat 360° (GRZ101): 450 m 800 m 1000 mMini pryzmat (GMP101): 800 m 1200 m 2000 mFolia odblaskowa (60 mm x 60mm): 150 m 250 m 250 mNajkrótsza mierzona odleg³oœæ: 1.5 m
Warunki atmosferyczne: A: Silna mg³a, widzialnoœæ 5 km, lub silne nas³onecznienie, silne falowanie powietrzaB: Lekkie zamglenie, widzialnoœæ ok. 20 km; lub umiarkowane nas³onecznienie,
lekkie falowanie powietrzaC: Zachmurzenie, brak mg³y, widzialnoœæ ok. 40 km; powietrze nie faluje
Dok³adnośæ (odch. stand. ISO17123-4) / Czas pomiaruTryb precyzyjny: 0.6 mm + 1 ppm / zwykle 7 s 1)
Tryb standard: 1 mm + 1 ppm / zwykle 2.4 sTryb szybki: 3 mm + 1 ppm / zwykle 0.8 sTryb Traking/SynchroTrack: 3 mm + 1 ppm / zwykle < 0.15 sTryb uœredniania: 1 mm + 1 ppmNajmniejsza wyœwietlana wartoœæ: 0.1 mm
Dok³adnośæ pomiaru na foliê odblaskow¹Tryb precyzyjny/standard/uœredniaj¹cy: 1 mm + 1 ppm 2)
Tryb Szybki/Traking/SynchroTrack: 5 mm + 1 ppmNajmniejsza wyœwietlana wartoœæ: 0.1 mm
MetodaTyp dalmierza: Wspó³osiowy, widzialny czerwony laserFala noœna 658 nmSystem pomiarowy: Specjalny analizator przesuniêcia fazowego ~ 100 MHz
Pomiar odleg³ości (bezreflektorowo)
OpisW trybie pomiaru bezreflektorowego, dalmierz laserowy PinPoint R1000 tachimetru TS30 mo¿e wykonywaæ pomiary do celów znajduj¹cych siê w odleg³oœci wiêkszej ni¿ 1000m. Opracowano now¹ technologiê, która pozwala na wykonywanie pomiarów do celów znajduj¹cych siê na tak du¿ych odleg³oœciach. G³ównym elementem dalmierza (EDM) jest system analizuj¹cy, który wykorzystuje modulacjê czêstotliwoœci z zakresu 100MHz. System analizuj¹cy okreœla podczas ka¿dego pomiaru indywidualne cechy zarówno wi¹zki mierz¹cej jak i celu. W rezultacie znane s¹ parametry ka¿dego pomiaru. Odleg³oœæ jest obliczana przy u¿yciu zaawansowanej techniki przetwarzania sygna³u wykorzystuj¹cej zasadê maksimum prawdopodobieñstwa. Oprócz gwa³townego wzrostu czu³oœci a zatem tak¿e zasiêgu pomiaru bezreflektorowego, nowy system zapewnia doskona³¹ dok³adnoœæ i wiarygodnoœæ pomiaru. Nawet podczas pomiarów w deszczu, mgle czy du¿ym zapyleniu. W dodatku system pomaga wyeliminowaæ b³êdy poprzez sygnalizowanie wykrycia wielu celów w zakresie wi¹zki pomiarowej.
1) Warunki atmosferyczne typu C, zasiêg do 1000 m, reflektor GPH1P2) Odleg³oœæ > 10 m, cel ustawiony prostopadle do instrumentu
5
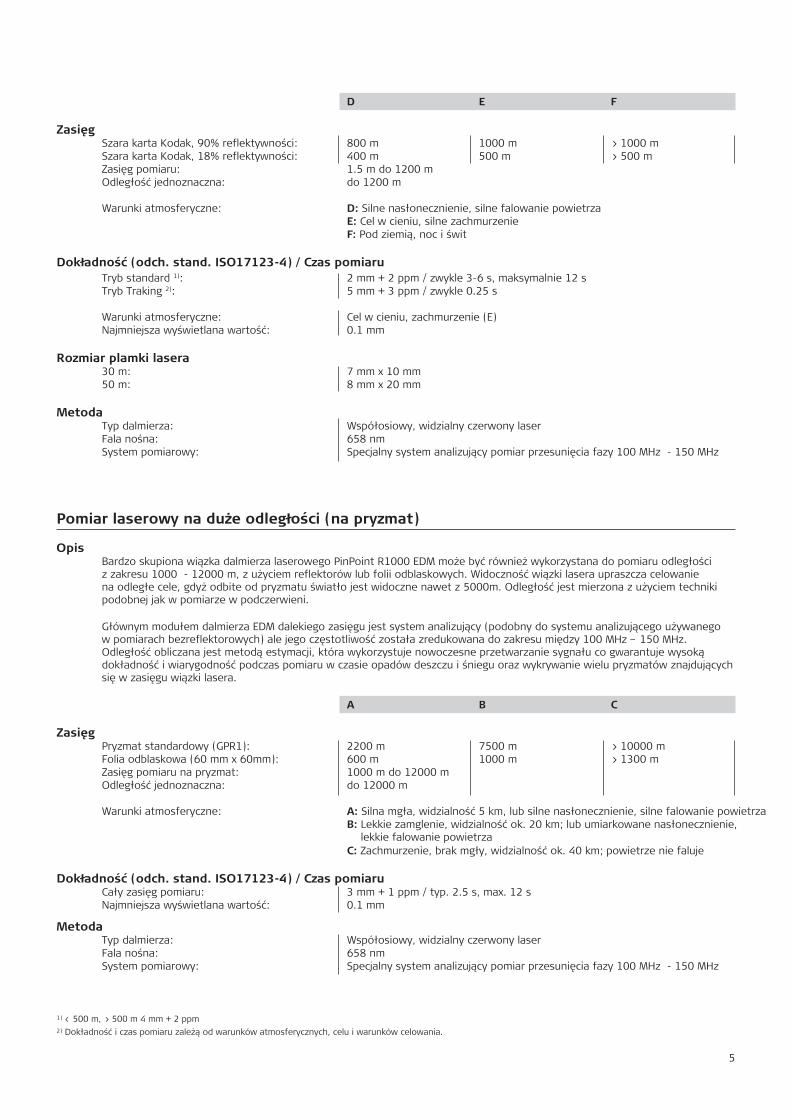
FED
ZasiêgSzara karta Kodak, 90% reflektywnoœci: 800 m 1000 m > 1000 mSzara karta Kodak, 18% reflektywnoœci: 400 m 500 m > 500 mZasiêg pomiaru: 1.5 m do 1200 mOdleg³oœæ jednoznaczna: do 1200 m
Warunki atmosferyczne: D: Silne nas³onecznienie, silne falowanie powietrzaE: Cel w cieniu, silne zachmurzenieF: Pod ziemi¹, noc i œwit
Dok³adnośæ (odch. stand. ISO17123-4) / Czas pomiaruTryb standard 1): 2 mm + 2 ppm / zwykle 3-6 s, maksymalnie 12 sTryb Traking 2): 5 mm + 3 ppm / zwykle 0.25 s
Warunki atmosferyczne: Cel w cieniu, zachmurzenie (E)Najmniejsza wyœwietlana wartoœæ: 0.1 mm
Rozmiar plamki lasera30 m: 7 mm x 10 mm50 m: 8 mm x 20 mm
MetodaTyp dalmierza: Wspó³osiowy, widzialny czerwony laserFala noœna: 658 nmSystem pomiarowy: Specjalny system analizuj¹cy pomiar przesuniêcia fazy 100 MHz - 150 MHz
Pomiar laserowy na du¿e odleg³ości (na pryzmat)
OpisBardzo skupiona wi¹zka dalmierza laserowego PinPoint R1000 EDM mo¿e byæ równie¿ wykorzystana do pomiaru odleg³oœci z zakresu 1000 - 12000 m, z u¿yciem reflektorów lub folii odblaskowych. Widocznoœæ wi¹zki lasera upraszcza celowanie na odleg³e cele, gdy¿ odbite od pryzmatu œwiat³o jest widoczne nawet z 5000m. Odleg³oœæ jest mierzona z u¿yciem techniki podobnej jak w pomiarze w podczerwieni.
G³ównym modu³em dalmierza EDM dalekiego zasiêgu jest system analizuj¹cy (podobny do systemu analizuj¹cego u¿ywanego w pomiarach bezreflektorowych) ale jego czêstotliwoœæ zosta³a zredukowana do zakresu miêdzy 100 MHz – 150 MHz. Odleg³oœæ obliczana jest metod¹ estymacji, która wykorzystuje nowoczesne przetwarzanie sygna³u co gwarantuje wysok¹ dok³adnoœæ i wiarygodnoœæ podczas pomiaru w czasie opadów deszczu i œniegu oraz wykrywanie wielu pryzmatów znajduj¹cych siê w zasiêgu wi¹zki lasera.
CBA
ZasiêgPryzmat standardowy (GPR1): 2200 m 7500 m > 10000 mFolia odblaskowa (60 mm x 60mm): 600 m 1000 m > 1300 mZasiêg pomiaru na pryzmat: 1000 m do 12000 mOdleg³oœæ jednoznaczna: do 12000 m
Warunki atmosferyczne: A: Silna mg³a, widzialnoœæ 5 km, lub silne nas³onecznienie, silne falowanie powietrzaB: Lekkie zamglenie, widzialnoœæ ok. 20 km; lub umiarkowane nas³onecznienie,
lekkie falowanie powietrzaC: Zachmurzenie, brak mg³y, widzialnoœæ ok. 40 km; powietrze nie faluje
Dok³adnośæ (odch. stand. ISO17123-4) / Czas pomiaruCa³y zasiêg pomiaru: 3 mm + 1 ppm / typ. 2.5 s, max. 12 sNajmniejsza wyœwietlana wartoœæ: 0.1 mm
MetodaTyp dalmierza: Wspó³osiowy, widzialny czerwony laserFala noœna: 658 nmSystem pomiarowy: Specjalny system analizuj¹cy pomiar przesuniêcia fazy 100 MHz - 150 MHz
1) < 500 m, > 500 m 4 mm + 2 ppm2) Dok³adnoœæ i czas pomiaru zale¿¹ od warunków atmosferycznych, celu i warunków celowania.
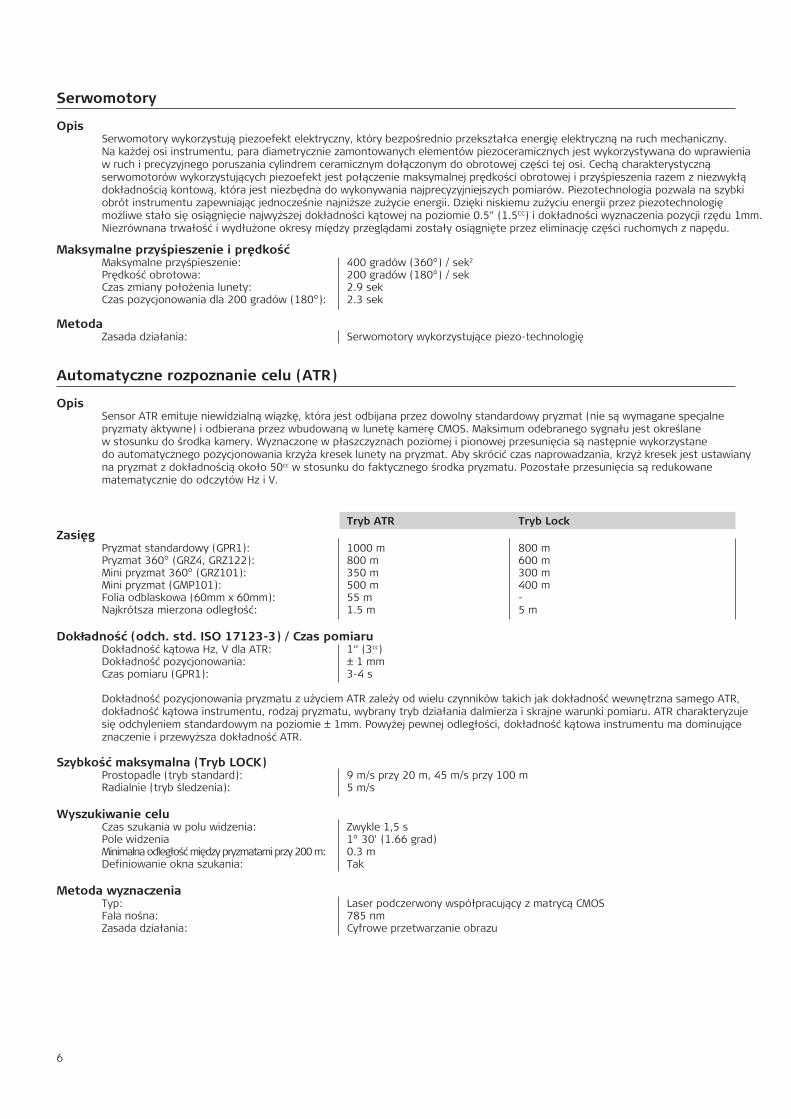
Serwomotory
OpisSerwomotory wykorzystuj¹ piezoefekt elektryczny, który bezpoœrednio przekszta³ca energiê elektryczn¹ na ruch mechaniczny. Na ka¿dej osi instrumentu, para diametrycznie zamontowanych elementów piezoceramicznych jest wykorzystywana do wprawienia w ruch i precyzyjnego poruszania cylindrem ceramicznym do³¹czonym do obrotowej czêœci tej osi. Cech¹ charakterystyczn¹ serwomotorów wykorzystuj¹cych piezoefekt jest po³¹czenie maksymalnej prêdkoœci obrotowej i przyœpieszenia razem z niezwyk³¹dok³adnoœci¹ kontow¹, która jest niezbêdna do wykonywania najprecyzyjniejszych pomiarów. Piezotechnologia pozwala na szybki obrót instrumentu zapewniaj¹c jednoczeœnie najni¿sze zu¿ycie energii. Dziêki niskiemu zu¿yciu energii przez piezotechnologiê mo¿liwe sta³o siê osi¹gniêcie najwy¿szej dok³adnoœci k¹towej na poziomie 0.5" (1.5CC) i dok³adnoœci wyznaczenia pozycji rzêdu 1mm. Niezrównana trwa³oœæ i wyd³u¿one okresy miêdzy przegl¹dami zosta³y osi¹gniête przez eliminacjê czêœci ruchomych z napêdu.
Maksymalne przyśpieszenie i prêdkośæMaksymalne przyœpieszenie: 400 gradów (360°) / sek2
Prêdkoœæ obrotowa: 200 gradów (180°) / sekCzas zmiany po³o¿enia lunety: 2.9 sekCzas pozycjonowania dla 200 gradów (180°): 2.3 sek
MetodaZasada dzia³ania: Serwomotory wykorzystuj¹ce piezo-technologiê
Automatyczne rozpoznanie celu (ATR)
OpisSensor ATR emituje niewidzialn¹ wi¹zkê, która jest odbijana przez dowolny standardowy pryzmat (nie s¹ wymagane specjalnepryzmaty aktywne) i odbierana przez wbudowan¹ w lunetê kamerê CMOS. Maksimum odebranego sygna³u jest okreœlane w stosunku do œrodka kamery. Wyznaczone w p³aszczyznach poziomej i pionowej przesuniêcia s¹ nastêpnie wykorzystane do automatycznego pozycjonowania krzy¿a kresek lunety na pryzmat. Aby skróciæ czas naprowadzania, krzy¿ kresek jest ustawianyna pryzmat z dok³adnoœci¹ oko³o 50cc w stosunku do faktycznego œrodka pryzmatu. Pozosta³e przesuniêcia s¹ redukowanematematycznie do odczytów Hz i V.
Tryb ATR Tryb LockZasiêg
Pryzmat standardowy (GPR1): 1000 m 800 mPryzmat 360° (GRZ4, GRZ122): 800 m 600 mMini pryzmat 360° (GRZ101): 350 m 300 mMini pryzmat (GMP101): 500 m 400 mFolia odblaskowa (60mm x 60mm): 55 m -Najkrótsza mierzona odleg³oœæ: 1.5 m 5 m
Dok³adnośæ (odch. std. ISO 17123-3) / Czas pomiaruDok³adnoœæ k¹towa Hz, V dla ATR: 1“ (3cc)Dok³adnoœæ pozycjonowania: ± 1 mmCzas pomiaru (GPR1): 3-4 s
Dok³adnoœæ pozycjonowania pryzmatu z u¿yciem ATR zale¿y od wielu czynników takich jak dok³adnoœæ wewnêtrzna samego ATR, dok³adnoœæ k¹towa instrumentu, rodzaj pryzmatu, wybrany tryb dzia³ania dalmierza i skrajne warunki pomiaru. ATR charakteryzuje siê odchyleniem standardowym na poziomie ± 1mm. Powy¿ej pewnej odleg³oœci, dok³adnoœæ k¹towa instrumentu ma dominuj¹ce znaczenie i przewy¿sza dok³adnoœæ ATR.
Szybkośæ maksymalna (Tryb LOCK)Prostopadle (tryb standard): 9 m/s przy 20 m, 45 m/s przy 100 mRadialnie (tryb œledzenia): 5 m/s
Wyszukiwanie celuCzas szukania w polu widzenia: Zwykle 1,5 sPole widzenia 1° 30' (1.66 grad)Minimalna odleg³oœæ miêdzy pryzmatami przy 200 m: 0.3 mDefiniowanie okna szukania: Tak
Metoda wyznaczeniaTyp: Laser podczerwony wspó³pracuj¹cy z matryc¹ CMOSFala noœna: 785 nmZasada dzia³ania: Cyfrowe przetwarzanie obrazu
6
PowerSearch (PS)
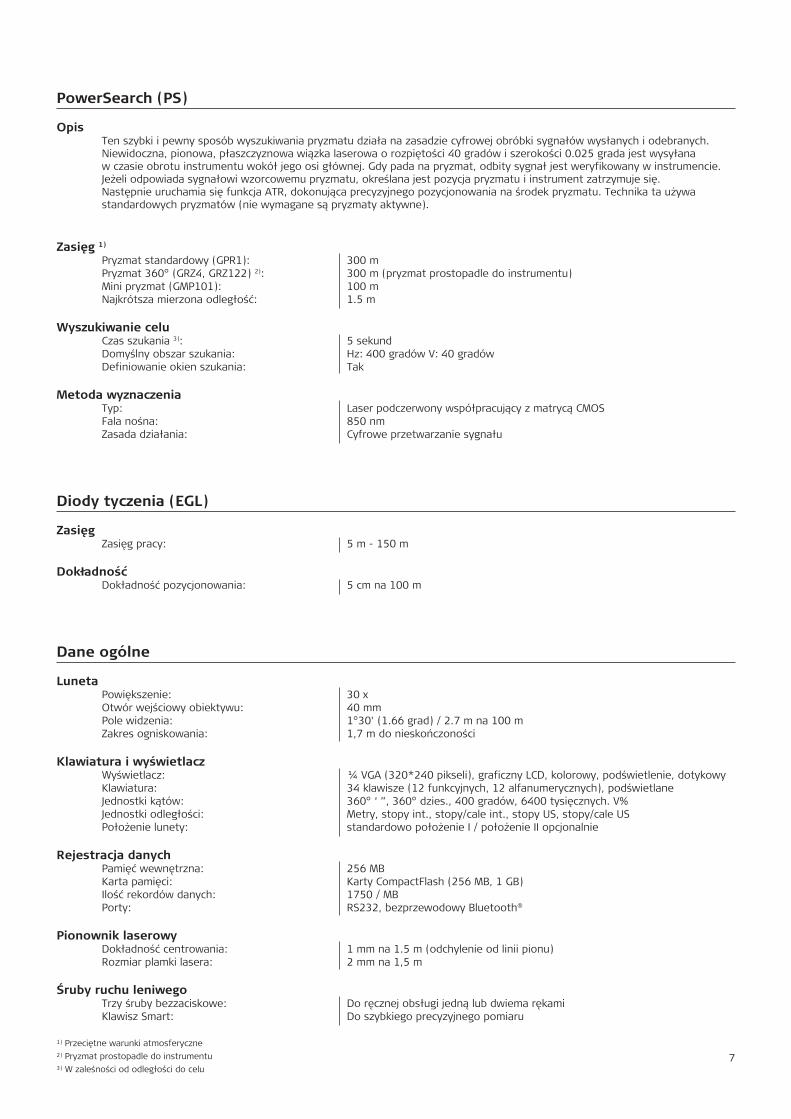
OpisTen szybki i pewny sposób wyszukiwania pryzmatu dzia³a na zasadzie cyfrowej obróbki sygna³ów wys³anych i odebranych. Niewidoczna, pionowa, p³aszczyznowa wi¹zka laserowa o rozpiêtoœci 40 gradów i szerokoœci 0.025 grada jest wysy³ana w czasie obrotu instrumentu wokó³ jego osi g³ównej. Gdy pada na pryzmat, odbity sygna³ jest weryfikowany w instrumencie. Je¿eli odpowiada sygna³owi wzorcowemu pryzmatu, okreœlana jest pozycja pryzmatu i instrument zatrzymuje siê. Nastêpnie uruchamia siê funkcja ATR, dokonuj¹ca precyzyjnego pozycjonowania na œrodek pryzmatu. Technika ta u¿ywa standardowych pryzmatów (nie wymagane s¹ pryzmaty aktywne).
Zasiêg 1)
Pryzmat standardowy (GPR1): 300 mPryzmat 360° (GRZ4, GRZ122) 2): 300 m (pryzmat prostopadle do instrumentu)Mini pryzmat (GMP101): 100 mNajkrótsza mierzona odleg³oœæ: 1.5 m
Wyszukiwanie celuCzas szukania 3): 5 sekundDomyœlny obszar szukania: Hz: 400 gradów V: 40 gradówDefiniowanie okien szukania: Tak
Metoda wyznaczeniaTyp: Laser podczerwony wspó³pracuj¹cy z matryc¹ CMOSFala noœna: 850 nmZasada dzia³ania: Cyfrowe przetwarzanie sygna³u
Diody tyczenia (EGL)
ZasiêgZasiêg pracy: 5 m - 150 m
Dok³adnośæDok³adnoœæ pozycjonowania: 5 cm na 100 m
Dane ogólne
LunetaPowiêkszenie: 30 xOtwór wejœciowy obiektywu: 40 mmPole widzenia: 1°30' (1.66 grad) / 2.7 m na 100 mZakres ogniskowania: 1,7 m do nieskoñczonoœci
Klawiatura i wyświetlaczWyœwietlacz: a VGA (320*240 pikseli), graficzny LCD, kolorowy, podœwietlenie, dotykowyKlawiatura: 34 klawisze (12 funkcyjnych, 12 alfanumerycznych), podœwietlaneJednostki k¹tów: 360° ‘ ”, 360° dzies., 400 gradów, 6400 tysiêcznych. V%Jednostki odleg³oœci: Metry, stopy int., stopy/cale int., stopy US, stopy/cale USPo³o¿enie lunety: standardowo po³o¿enie I / po³o¿enie II opcjonalnie
Rejestracja danychPamiêæ wewnêtrzna: 256 MBKarta pamiêci: Karty CompactFlash (256 MB, 1 GB)Iloœæ rekordów danych: 1750 / MBPorty: RS232, bezprzewodowy Bluetooth®
Pionownik laserowyDok³adnoœæ centrowania: 1 mm na 1.5 m (odchylenie od linii pionu)Rozmiar plamki lasera: 2 mm na 1,5 m
Śruby ruchu leniwegoTrzy œruby bezzaciskowe: Do rêcznej obs³ugi jedn¹ lub dwiema rêkamiKlawisz Smart: Do szybkiego precyzyjnego pomiaru
1) Przeciêtne warunki atmosferyczne2) Pryzmat prostopadle do instrumentu3) W zaleœnoœci od odleg³oœci do celu
7
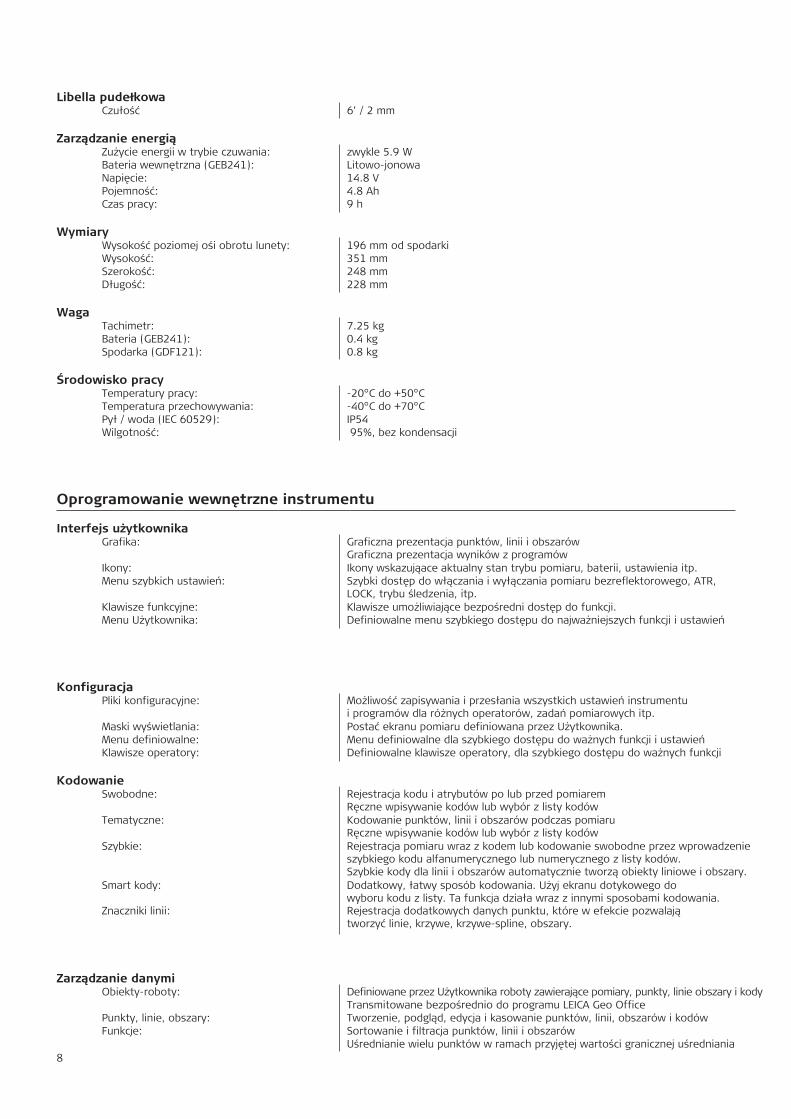
Libella pude³kowaCzu³oœæ 6’ / 2 mm
Zarz¹dzanie energi¹Zu¿ycie energii w trybie czuwania: zwykle 5.9 WBateria wewnêtrzna (GEB241): Litowo-jonowaNapiêcie: 14.8 VPojemnoœæ: 4.8 AhCzas pracy: 9 h
WymiaryWysokoœæ poziomej oœi obrotu lunety: 196 mm od spodarkiWysokoœæ: 351 mmSzerokoœæ: 248 mmD³ugoœæ: 228 mm
WagaTachimetr: 7.25 kgBateria (GEB241): 0.4 kgSpodarka (GDF121): 0.8 kg
Środowisko pracyTemperatury pracy: -20°C do +50°CTemperatura przechowywania: -40°C do +70°CPy³ / woda (IEC 60529): IP54Wilgotnoœæ: 95%, bez kondensacji
Oprogramowanie wewnêtrzne instrumentu
Interfejs u¿ytkownikaGrafika: Graficzna prezentacja punktów, linii i obszarów
Graficzna prezentacja wyników z programówIkony: Ikony wskazuj¹ace aktualny stan trybu pomiaru, baterii, ustawienia itp.Menu szybkich ustawieñ: Szybki dostêp do w³¹czania i wy³¹czania pomiaru bezreflektorowego, ATR,
LOCK, trybu œledzenia, itp.Klawisze funkcyjne: Klawisze umo¿liwiaj¹ce bezpoœredni dostêp do funkcji.Menu U¿ytkownika: Definiowalne menu szybkiego dostêpu do najwa¿niejszych funkcji i ustawieñ
KonfiguracjaPliki konfiguracyjne: Mo¿liwoœæ zapisywania i przes³ania wszystkich ustawieñ instrumentu
i programów dla ró¿nych operatorów, zadañ pomiarowych itp.Maski wyœwietlania: Postaæ ekranu pomiaru definiowana przez U¿ytkownika.Menu definiowalne: Menu definiowalne dla szybkiego dostêpu do wa¿nych funkcji i ustawieñKlawisze operatory: Definiowalne klawisze operatory, dla szybkiego dostêpu do wa¿nych funkcji
KodowanieSwobodne: Rejestracja kodu i atrybutów po lub przed pomiarem
Rêczne wpisywanie kodów lub wybór z listy kodówTematyczne: Kodowanie punktów, linii i obszarów podczas pomiaru
Rêczne wpisywanie kodów lub wybór z listy kodówSzybkie: Rejestracja pomiaru wraz z kodem lub kodowanie swobodne przez wprowadzenie
szybkiego kodu alfanumerycznego lub numerycznego z listy kodów.Szybkie kody dla linii i obszarów automatycznie tworz¹ obiekty liniowe i obszary.
Smart kody: Dodatkowy, ³atwy sposób kodowania. U¿yj ekranu dotykowego dowyboru kodu z listy. Ta funkcja dzia³a wraz z innymi sposobami kodowania.
Znaczniki linii: Rejestracja dodatkowych danych punktu, które w efekcie pozwalaj¹tworzyæ linie, krzywe, krzywe-spline, obszary.
Zarz¹dzanie danymiObiekty-roboty: Definiowane przez U¿ytkownika roboty zawieraj¹ce pomiary, punkty, linie obszary i kody
Transmitowane bezpoœrednio do programu LEICA Geo OfficePunkty, linie, obszary: Tworzenie, podgl¹d, edycja i kasowanie punktów, linii, obszarów i kodówFunkcje: Sortowanie i filtracja punktów, linii i obszarów
Uœrednianie wielu punktów w ramach przyjêtej wartoœci granicznej uœredniania8
9
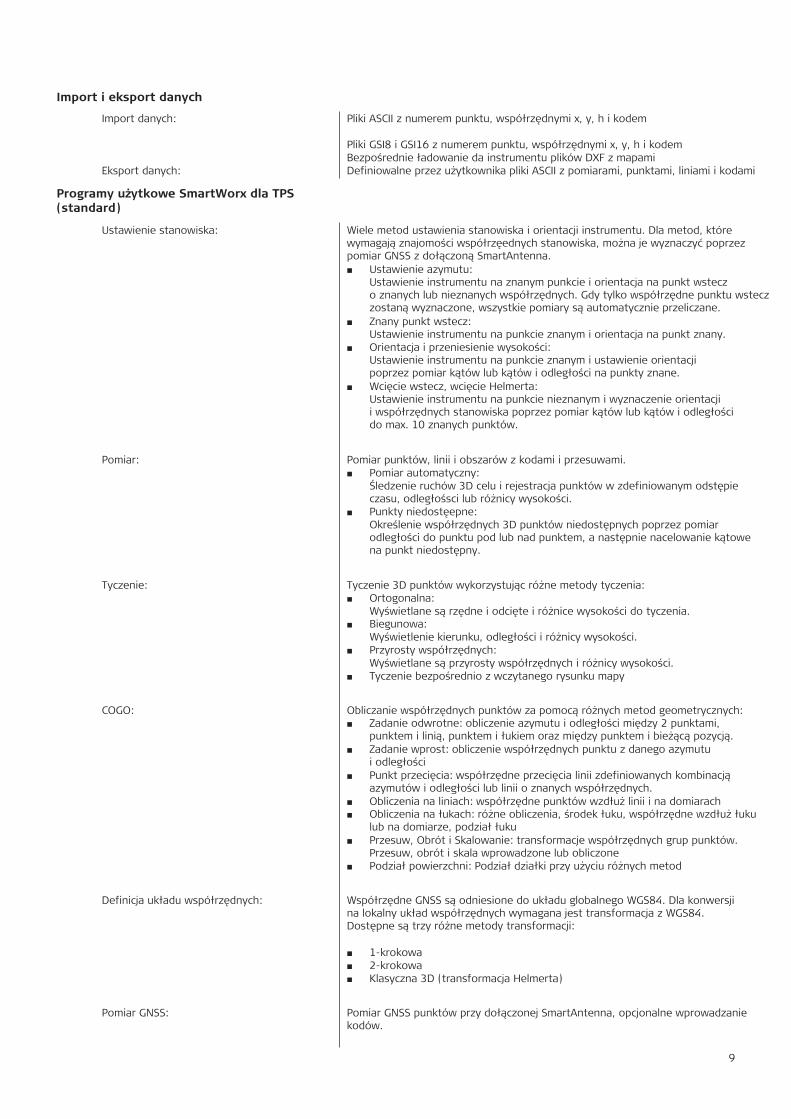
Import i eksport danych
Import danych: Pliki ASCII z numerem punktu, wspó³rzêdnymi x, y, h i kodem
Pliki GSI8 i GSI16 z numerem punktu, wspó³rzêdnymi x, y, h i kodemBezpoœrednie ³adowanie da instrumentu plików DXF z mapami
Eksport danych: Definiowalne przez u¿ytkownika pliki ASCII z pomiarami, punktami, liniami i kodami
Programy u¿ytkowe SmartWorx dla TPS (standard)
Ustawienie stanowiska: Wiele metod ustawienia stanowiska i orientacji instrumentu. Dla metod, którewymagaj¹ znajomoœci wspó³rzêednych stanowiska, mo¿na je wyznaczyæ poprzez pomiar GNSS z do³¹czon¹ SmartAntenna.
Ustawienie azymutu:Ustawienie instrumentu na znanym punkcie i orientacja na punkt wstecz o znanych lub nieznanych wspó³rzêdnych. Gdy tylko wspó³rzêdne punktu wstecz zostan¹ wyznaczone, wszystkie pomiary s¹ automatycznie przeliczane.Znany punkt wstecz:Ustawienie instrumentu na punkcie znanym i orientacja na punkt znany.Orientacja i przeniesienie wysokoœci:Ustawienie instrumentu na punkcie znanym i ustawienie orientacji poprzez pomiar k¹tów lub k¹tów i odleg³oœci na punkty znane.Wciêcie wstecz, wciêcie Helmerta:Ustawienie instrumentu na punkcie nieznanym i wyznaczenie orientacji i wspó³rzêdnych stanowiska poprzez pomiar k¹tów lub k¹tów i odleg³oœci do max. 10 znanych punktów.
Pomiar: Pomiar punktów, linii i obszarów z kodami i przesuwami.Pomiar automatyczny:Œledzenie ruchów 3D celu i rejestracja punktów w zdefiniowanym odstêpieczasu, odleg³oœsci lub ró¿nicy wysokoœci.Punkty niedostêepne:Okreœlenie wspó³rzêdnych 3D punktów niedostêpnych poprzez pomiarodleg³oœci do punktu pod lub nad punktem, a nastêpnie nacelowanie k¹towena punkt niedostêpny.
Tyczenie: Tyczenie 3D punktów wykorzystuj¹c ró¿ne metody tyczenia:Ortogonalna:Wyœwietlane s¹ rzêdne i odciête i ró¿nice wysokoœci do tyczenia.Biegunowa:Wyœwietlenie kierunku, odleg³oœci i ró¿nicy wysokoœci.Przyrosty wspó³rzêdnych:Wyœwietlane s¹ przyrosty wspó³rzêdnych i ró¿nicy wysokoœci.Tyczenie bezpoœrednio z wczytanego rysunku mapy
COGO: Obliczanie wspó³rzêdnych punktów za pomoc¹ ró¿nych metod geometrycznych:Zadanie odwrotne: obliczenie azymutu i odleg³oœci miêdzy 2 punktami, punktem i lini¹, punktem i ³ukiem oraz miêdzy punktem i bie¿¹c¹ pozycj¹.Zadanie wprost: obliczenie wspó³rzêdnych punktu z danego azymutu i odleg³oœciPunkt przeciêcia: wspó³rzêdne przeciêcia linii zdefiniowanych kombinacj¹azymutów i odleg³oœci lub linii o znanych wspó³rzêdnych. Obliczenia na liniach: wspó³rzêdne punktów wzd³u¿ linii i na domiarachObliczenia na ³ukach: ró¿ne obliczenia, œrodek ³uku, wspó³rzêdne wzd³u¿ ³ukulub na domiarze, podzia³ ³ukuPrzesuw, Obrót i Skalowanie: transformacje wspó³rzêdnych grup punktów.Przesuw, obrót i skala wprowadzone lub obliczonePodzia³ powierzchni: Podzia³ dzia³ki przy u¿yciu ró¿nych metod
Definicja uk³adu wspó³rzêdnych: Wspó³rzêdne GNSS s¹ odniesione do uk³adu globalnego WGS84. Dla konwersji na lokalny uk³ad wspó³rzêdnych wymagana jest transformacja z WGS84. Dostêpne s¹ trzy ró¿ne metody transformacji:
1-krokowa2-krokowaKlasyczna 3D (transformacja Helmerta)
Pomiar GNSS: Pomiar GNSS punktów przy do³¹czonej SmartAntenna, opcjonalne wprowadzanie kodów.
10
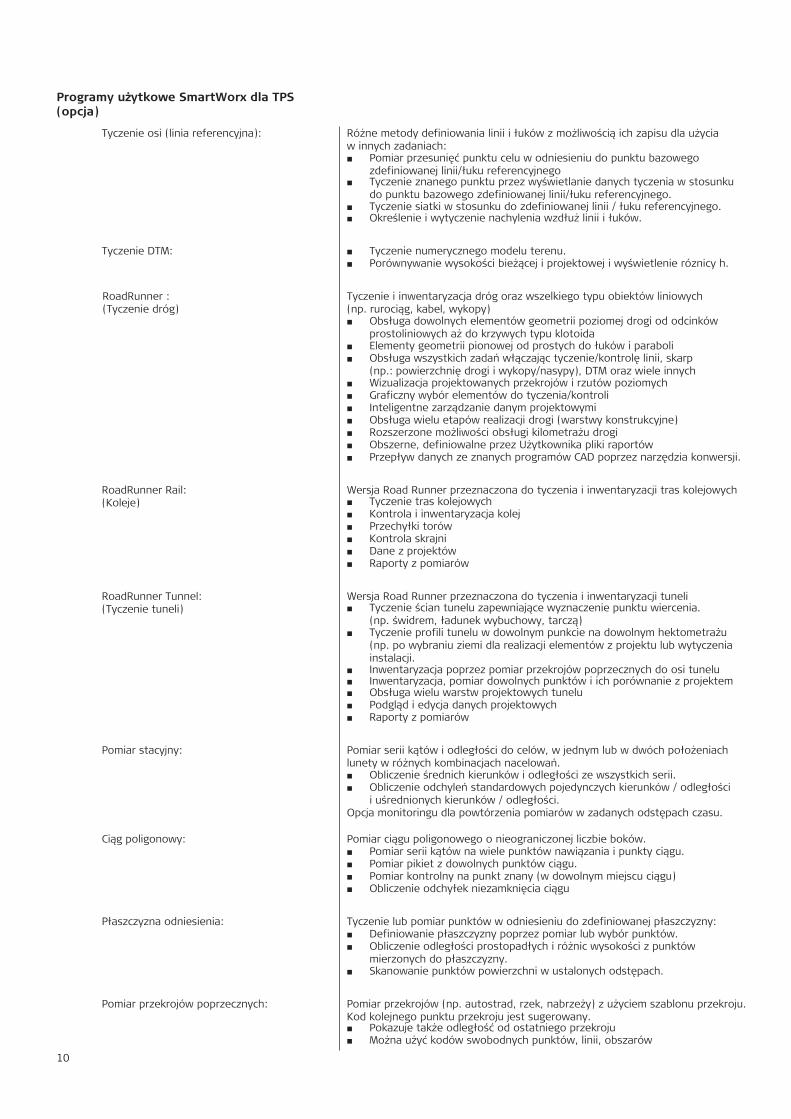
Programy u¿ytkowe SmartWorx dla TPS(opcja)
Tyczenie osi (linia referencyjna): Ró¿ne metody definiowania linii i ³uków z mo¿liwoœci¹ ich zapisu dla u¿ycia w innych zadaniach:
Pomiar przesuniêæ punktu celu w odniesieniu do punktu bazowegozdefiniowanej linii/³uku referencyjnegoTyczenie znanego punktu przez wyœwietlanie danych tyczenia w stosunku do punktu bazowego zdefiniowanej linii/³uku referencyjnego.Tyczenie siatki w stosunku do zdefiniowanej linii / ³uku referencyjnego.Okreœlenie i wytyczenie nachylenia wzd³u¿ linii i ³uków.
Tyczenie DTM: Tyczenie numerycznego modelu terenu.Porównywanie wysokoœci bie¿¹cej i projektowej i wyœwietlenie róznicy h.
RoadRunner :(Tyczenie dróg)
Tyczenie i inwentaryzacja dróg oraz wszelkiego typu obiektów liniowych (np. ruroci¹g, kabel, wykopy)
Obs³uga dowolnych elementów geometrii poziomej drogi od odcinkówprostoliniowych a¿ do krzywych typu klotoidaElementy geometrii pionowej od prostych do ³uków i paraboliObs³uga wszystkich zadañ w³¹czaj¹c tyczenie/kontrolê linii, skarp (np.: powierzchniê drogi i wykopy/nasypy), DTM oraz wiele innychWizualizacja projektowanych przekrojów i rzutów poziomychGraficzny wybór elementów do tyczenia/kontroliInteligentne zarz¹dzanie danym projektowymiObs³uga wielu etapów realizacji drogi (warstwy konstrukcyjne)Rozszerzone mo¿liwoœci obs³ugi kilometra¿u drogiObszerne, definiowalne przez U¿ytkownika pliki raportówPrzep³yw danych ze znanych programów CAD poprzez narzêdzia konwersji.
RoadRunner Rail:(Koleje)
Wersja Road Runner przeznaczona do tyczenia i inwentaryzacji tras kolejowychTyczenie tras kolejowychKontrola i inwentaryzacja kolejPrzechy³ki torówKontrola skrajniDane z projektówRaporty z pomiarów
RoadRunner Tunnel:(Tyczenie tuneli)
Wersja Road Runner przeznaczona do tyczenia i inwentaryzacji tuneliTyczenie œcian tunelu zapewniaj¹ce wyznaczenie punktu wiercenia. (np. œwidrem, ³adunek wybuchowy, tarcz¹)Tyczenie profili tunelu w dowolnym punkcie na dowolnym hektometra¿u (np. po wybraniu ziemi dla realizacji elementów z projektu lub wytyczenia instalacji.Inwentaryzacja poprzez pomiar przekrojów poprzecznych do osi tuneluInwentaryzacja, pomiar dowolnych punktów i ich porównanie z projektemObs³uga wielu warstw projektowych tuneluPodgl¹d i edycja danych projektowychRaporty z pomiarów
Pomiar stacyjny: Pomiar serii k¹tów i odleg³oœci do celów, w jednym lub w dwóch po³o¿eniachlunety w ró¿nych kombinacjach nacelowañ.
Obliczenie œrednich kierunków i odleg³oœci ze wszystkich serii.Obliczenie odchyleñ standardowych pojedynczych kierunków / odleg³oœci i uœrednionych kierunków / odleg³oœci.
Opcja monitoringu dla powtórzenia pomiarów w zadanych odstêpach czasu.
Ci¹g poligonowy: Pomiar ci¹gu poligonowego o nieograniczonej liczbie boków.Pomiar serii k¹tów na wiele punktów nawi¹zania i punkty ci¹gu.Pomiar pikiet z dowolnych punktów ci¹gu.Pomiar kontrolny na punkt znany (w dowolnym miejscu ci¹gu)Obliczenie odchy³ek niezamkniêcia ci¹gu
P³aszczyzna odniesienia: Tyczenie lub pomiar punktów w odniesieniu do zdefiniowanej p³aszczyzny:Definiowanie p³aszczyzny poprzez pomiar lub wybór punktów.Obliczenie odleg³oœci prostopad³ych i ró¿nic wysokoœci z punktówmierzonych do p³aszczyzny.Skanowanie punktów powierzchni w ustalonych odstêpach.
Pomiar przekrojów poprzecznych: Pomiar przekrojów (np. autostrad, rzek, nabrze¿y) z u¿yciem szablonu przekroju. Kod kolejnego punktu przekroju jest sugerowany.
Pokazuje tak¿e odleg³oœæ od ostatniego przekrojuMo¿na u¿yæ kodów swobodnych punktów, linii, obszarów
Podzia³ powierzchni: Program podzia³ powierzchni to opcja dla programu COGOPodzia³ obszaru z wykorzystaniem ró¿nych metodPe³ne zobrazowanie graficzne
Obliczenie objêtoœci: Definicja i edycja obszarów i ich krawêdziObliczanie DTMObliczanie objêtoœci zdefiniowanych obszarów do wysokoœci odniesienia
Punkt ukryty: £atwy pomiar punktów bezpoœrednio niewidocznych z u¿yciem specjalnej tyczki z 2 lub 3 reflektorami. Tyczka trzymana dowolnie. Obliczane s¹ obserwacje tak jakby pomiar by³ wykonany bezpoœrednio.
Monitoring: Program Monitoring zosta³ zaprojektowany do u³atwienia pomiarów wielokrotnych do zdefiniowanych punktów w okreœlonych odstêpach czasu. Doskonale nadaj siê do ma³ych projektów monitoringu.
Kontroler do zdalnego sterowania (RX1250Tc)
OpisKontroler RX1250Tc z Windows CE u¿ywa do zdalnego sterowania tachimetru TS30 i SmartAntena ze Smart Pole, nowoczesnej technologii transmisji radiowej w paœmie rozproszonym 2.4 GHz. RX1250Tc zosta³ wyposa¿ony w ekran kolorowy nastêpnej generacji, który zapewnia wysoki kontrast i jasnoœæ obrazu w ka¿dych warunkach. Mo¿na wybraæ dwa sposoby zdalnego sterowania TS30: tradycyjnie z odwzorowaniem ekranu TS30 na RX1250Tc. Ten ³atwy do nauki i prosty w u¿yciu sposób sprawia, ¿e ¿adne dane nie s¹ przesy³ane transmisj¹ radiow¹ co zapobiega ich ewentualnej utracie. W drugiej koncepcji zasadnicz¹ rolê pe³ni RX1250Tc. Wszystkie programy s¹ uruchamiane w RX1250Tc i wszystkie dane s¹ rejestrowane w bazie danych RX1250Tc. Co wiêcej RX1250Tc mo¿e byæ stosowany wymiennie zarówno dla TS30 jak i GPS1200+ stanowi¹c bardzo ekonomiczne rozwi¹zanie dla sterowania wszystkimi instrumentami. Takie cechy daj¹ w rezultacie pe³ny zdalny dostêp do danych. Pe³na klawiatura typu QWERTY zapewnia szybkie i ³atwe wprowadzanie liter i cyfr, wprowadzanie kodów i krótkich opisów. Bezpieczny protokó³ transmisji i pasmo czêstotliwoœci transmisji redukuj¹ mo¿liwoœæ interferencji ze strony innych nadajników 2.4 GHz. Dodatkowo, w przypadkach, gdy w otoczeniu pracuje wiêcej RX1250Tc, u¿ytkownik mo¿e wybraæ w³aœciwy „numer po³¹czenia”.
£¹cze komunikacyjneUrz¹dzenie: Wbudowany modem radiowy
Cechy kontroleraWyœwietlacz: a VGA (320*240 pikseli), graficzny LCD, dotykowy, podœwietlany, kolorowyKlawiatura: 62 klawisze (12 funkcyjnych, 12 alfanumerycznych) podœwietleniePort: RS232
Bateria wewnêetrzna (GEB211)Typ: Litowo – jonowaNapiêcie: 7.4 VPojemnoœæ: 2.2 AhCzas dzia³ania: RX1250Tc: zwykle 8 h
WagaRX1250T/Tc: 0.8 kgBateria (GEB211): 0.1 kgUchwyt na tyczkê: 0.25 kg
Środowisko pracyTemperatury pracy: -30°C do +50°CTemperatura przechowywania: -40°C do +80°CPy³ / woda (IEC 60529): IP67Wodoszczelnoœæ (MIL-STD-810F): Chwilowe zanurzenie na g³êbokoœæ 1 m
11
SmartStation (ATX1230+ GNSS)
OpisSmartStation jest tachimetrem TS30 z do³¹czonym odbiornikiem GNSS ATX1230+ obs³uguj¹cym 120 kana³ów GPS, GLONASS, Galileo, Compss. Wszystkie operacje GNSS i TPS s¹ kontrolowane z klawiatury TPS, wszystkie dane s¹ zapisywane w tej samej bazie danych, wszystkie informacje s¹ wyœwietlane na ekranie tachimetru. Pozycjonowanie GNSS RTK pozwala wyznaczyæ wspó³rzêdne stanowiska z dok³adnoœci¹ centymetrow¹, dalsze ustawiania s¹ kontynuowane w tachimetrze. SmartAntenna mo¿e byæ u¿ywana tak¿e osobno, na tyczce z kontrolerem RX1250Tc, który wyposa¿ono w Windows CE.
Dok³adnoœæ wyznaczenia po³o¿enia poziomego i wysokoœci s¹ zale¿ne od ró¿nych czynników takich jak iloœæ satelitów, geometria uk³adu satelitów, czas obserwacji, dok³adnoœæ efemeryd, stan jonosfery, wielodro¿noœæ sygna³ów itd. Podane wielkoœci odnosz¹ siê do normalnych i sprzyjaj¹cych warunków. Obs³uga sygna³ów GPS i GLONASS zwiêksza wydajnoœæ i dok³adnoœæ odbiornika do 30% w porównaniu do samego GPS. Szybkoœæ pomiaru i dok³adnoœæ zostan¹ w przysz³oœci zwiêkszone dziêki konstelacji GPS L5.
Dok³adnośæDok³adnoœæ pozycji: Pozioma: 10 mm + 1 ppm
Pionowa: 20 mm + 1 ppmPrzy u¿ywaniu w sieciach stacji referencyjnych, dok³adnoœæ zale¿y od charakterystyk dok³adnoœciowych samej sieci.
Inicjalizacja pomiaruMetoda: Real time (RTK)Wiarygodnoœæ inicjalizacji: Lepsza ni¿ 99.99%Czas inicjalizacji: Zwykle 8 sek, przy 5 lub wiêcej satelitach na L1 i L2Zasiêg: Do 50 km, przy dostêpnym sprawnym ³¹czu danych Real-time
Formaty danych RTKFormaty dla odbierania RTK: W³asne formaty Leica (Leica, Leica 4G), CMR, CMR+, RTCM V2.1/2.2/2.3/3.x
SmartAntenna ATX1230Technologia odbiornika: Opatentowana technologia SmartTrack+.
Dyskretne filtry eliptyczne. Szybkie odbieranie. Silny sygna³. Ma³e zak³ócenia.Znakomite œledzenie, nawet niskich satelitów w trudnych warunkach.Odpornoœæ na interferencje.Eliminacja sygna³lów wielodro¿nych.
Iloœæ kana³ów ATX1230+ GNSS: 120, L1/L2/L5 GPS, GLONASS, Galileo, Compass 1)
P³yta bazowa: WbudowanaWymiary (œrednica x wysokoœæ): 186mm x 89mmWaga: 1.12kg
1) Prace nad systemem Compass nie zosta³y ukoñczone, jednak¿e GPS1200+ odbiera³ sygna³y testowe podczas prób. W strukturze sygna³u Compass wci¹¿ mog¹ zachodziæ zmiany dlatego Leica Geosystems nie mo¿e zagwarantowaæ pe³nej zgodnoœci z Compass.
12
Oprogramowanie LEICA Geo Office
Opis£atwy w obs³udze, wszechstronny, pakiet programów dla danych TPS, GNSS i niwelacyjnych. Umo¿liwia ca³oœciowe zarz¹dzanie danymi TPS, GNSS i z niwelacji. Pozwala na przetwarzanie danych jednego typu lub ich kombinacji w³¹czaj¹c w to postprocessing obserwacji GNSS i danych z pomiarów RTK.Zarz¹dza ca³oœciowo wszystkimi danym. Zarz¹dzanie projektami, transmisja danych, import/eksport, przetwarzanie i edycja danych, wyrównanie, definicje uk³adów i transformacji, listy kodów, raporty itp. Jednolite podejœcie dla obs³ugi danych TPS, GNSS i niwelacyjnych, bazuje na standardach Windows. Zintegrowany system pomocy programu zawiera podrêcznik z dodatkowymi informacjami. Pracuje pod Windows™ 2000 i XP.
Interfejs u¿ytkownikaIntuicyjny interfejs graficzny wykorzystuj¹cy standardowe mechanizmy Windows™. Wbudowana mo¿liwoœæ konfigurowania programu stosownie do potrzeb i preferencji U¿ytkownika.
Sk³adniki standardoweSk³adniki standardowe Szybka, potê¿na baza danych do automatycznego zarz¹dzania wszystkimi,
zawartymi w projektach punktami i obserwacjami, wed³ug okreœlonych zasad zapewniaj¹cych sta³¹ spójnoœæ danych.Projekty, uk³ady wspó³rzêdnych, anteny, szablony raportów i listy kodów zarz¹dzane s¹ osobno.Obs³uga ró¿nych rodzajów transformacji, elipsoid i odwzorowañ oraz definiowanych przez u¿ytkownika modeli geoidy i tzw. country specific coordinate systems s³u¿cych konwersji do wspó³rzêdnych lokalnych. Stosownie do wymagañ projektu mo¿na wybraæ jedn¹ z szeœciu typów transformacji.Zarz¹dzanie antenami dla definiowania ich parametrów wewnêtrznych (ofsets).Zarz¹dzanie listami kodów dla grupowania kodów i atrybutów.
Import i Eksport: Import danych z karty compact-flash, bezpoœrednio z odbiorników, tachimetrów i niwelatorów cyfrowych, lub ze stacji referencyjnej i innych Ÿróde³ przez Internet.Import wspó³rzêdnych real-time (RTK) i DGPS.
Import i Eksport ASCII: Import list wspó³rzêdnych jako plików ASCII o definiowalnej strukturze.Export wyników w dowolnym formacie do dowolnego programu przy wykorzystaniu funkcji Eksport ASCII.Transfer punktów, linii, obszarów, wspó³rzêdnych, kodów i atrybutów do systemów GIS, CAD i kartograficznych.
Widok i Edycja: Zró¿nicowane formy grafiki dla wizualizacji danych i pe³nego wgl¹du w dane zwarte w projekcie. Informacje o punktach, liniach i obszarach mog¹ byæ wyœwietlane wraz z kodami i atrybutami. Narzêdzia edycyjne umo¿liwiaj¹ selekcjonowanie danych przed ich przetworzeniem lub exportem.
Processing TPS: Przeliczenie obserwacji z tachimetrów dla aktualizacji stanowiska i orientacji.Okreœlenie stanowisk i ci¹gów poligonowych i ich obliczenie z dobranymi parametrami.Raporty z obliczenia ci¹gów w formacie HTML.
Obliczenia COGO: Obliczenia wspó³rzêdnych punktów za pomoc¹ ró¿norodnych metod geometrycznych.Zadanie odwrotne: Obliczenie wspó³rzêdnych punktów z azymutu i odleg³oœci od punktu pocz¹tkowego. Zadanie proste: Obliczenie wspó³rzêdnych punktów z przeciêcia prostych przechodz¹cych przez dane punkty.Obliczenia wzd³u¿ prostej: Obliczenie wspó³rzêdnych punktów w oparciu o odleg³oœci i przesuwy wzd³u¿ prostej.Obliczenia ³uku: ró¿ne obliczenia dla ³uków, np.: œrodek ³uku, przesuwy punktów wzglêdem ³uku, podzia³ luku na odcinki.Przesuw, obrót i skala: Obliczenie wspó³rzêdnych grup punktów z pomoc¹ przesuwów, obrotów i skalowania istniej¹cych wspó³rzêdnych punktów. Wartoœci przesuwu, obrotu i skali mog¹ zostaæ wprowadzone rêcznie lub obliczone.Podzia³ obszaru: podzia³ obszaru na mniejsze czêœci za pomoc¹ ró¿norodnych metod.
Manager listy kodów Tworzenie list kodów z grupami kodów, kodami i atrybutami.Zarz¹dzanie listami kodów.
Raporty Raporty tworzone w HTML stanowi¹ podstawê profesjonalnych opracowañ. Mo¿na utworzyæ raporty z pomiaru terenowego, raporty z uœredniania wspó³rzêdnych, raporty z przetwarzania danych i inne. Mo¿na je skonfigurowaæ, aby zawiera³y wymagan¹ treœæ oraz w postaci szablonu zdefiniowaæ ich wygl¹d.
Narzêdzia Wydajne narzêdzia takie jak Manager Listy Kodów, Manager wymiany danych, Manager Formatów i Aktualizacja oprogramowania s¹ narzêdziami wspólnymi dla odbiorników GNSS, tachimetrów i niwelatorów cyfrowych.
13
Opcje GNSSProcessing danych L1: Graficzne wybieranie wektorów (linii bazowych), polecenia do processingu itp.
Automatyczny lub rêczny wybór wektorów i definicja kolejnoœci obliczeñWsadowy processing pojedynczego wektora lub wielu wektorów.Szeroki zakres parametrów processingu. Automatyczne „przesiewanie”, wykrywanie utraconych cykli, b³êdów grubych itp. Processing automatyczny lub nadzorowany przez u¿ytkownika.
Processing danych L1 / L2: Graficzne wybieranie wektorów (linii bazowych), polecenia do processingu itp.Automatyczny lub rêczny wybór wektorów i definicja kolejnoœci obliczeñWsadowy processing pojedynczego wektora lub wielu wektorów.Szeroki zakres parametrów processingu. Automatyczne „przesiewanie”, wykrywanie utraconych cykli, b³êdów grubych itp. Processing automatyczny lub nadzorowany przez u¿ytkownika.
Processing danych GLONASS Processing danych GLONASS jest uzupe³nieniem processingu danych GPS.Import RINEX: Import danych w formacie RINEX.
Opcje niwelacyjneObliczenia niwelacji: Podgl¹d danych z niwelatora cyfrowego Leica w dzienniku niwelacji w Geo Office.
Wybór w³aœciwych parametrów obliczeñ i obliczenie niwelacji. Szybkie, automatyczne wykonanie obliczeñ. Sprawdzenie, analiza wyników i tworzenie raportu w Managerze wyników. Koñcowy zapis wyników i/lub ich eksport.
Wyrównanie i Projekt 1D: Potê¿ny algorytm MOVE3 do œcis³ego wyrównania 1D. Ponadto, mo¿liwoœæ projektowania i analizy sieci.
Opcje ogólneUk³ady i transformacje: LEICA Geo Office obs³uguje szereg transformacji, elipsoid i odwzorowañ
oraz definiowalnych przez u¿ytkownika modeli geoidy i country specific coordinate systems s³u¿¹cych konwersji do wspó³rzêdnych lokalnych. Opcjonalny modu³ Uk³ady i Transformacje pozwala zdefiniowaæ parametry transformacji. Stosownie do wymagañ projektu mo¿na wybraæ jedn¹ z szeœciu typów transformacji.
Wyrównanie i Projekt 3D: W³¹czenie wszystkich obserwacji do wyrównania sieci metod¹ najmniejszychkwadratów dla najlepszego wpasowania obserwacji w punkty sta³e. Rozszerzone testy statystyczne dla wyszukania b³êdów grubych obserwacji. U¿ytkownik mo¿e wybraæ rodzaj wyrównania: 3D, 2D czy 1D - wszystkie bazuj¹ na algorytmie MOVE3 wyrównania œcis³ego. Ponadto modu³ ten wspomaga projektowanie i analizy sieci - jeszcze przed dokonaniem obserwacji w terenie.
Eksport GIS / CAD: Pozwala na export danych GIS/CAD do systemów takich jak AutoCAD (DXF / DWG), MicroStation.
Powierzchnie i Objêtoœci: Przypisywanie pomierzonych punktów do powierzchni i obliczanie Cyfrowego Modelu Terenu. U¿yj automatycznego tworzenia krawêdzi lub okreœl je rêcznie.Wprowadzenie linii nieci¹g³oœci automatycznie aktualizuje model.Wizualizacja powierzchni w 2D lub 3D.Obliczenie objêtoœci ponad wysokoœæ odniesienia lub pomiêdzy powierzchniami.
Wymagania sprzêtoweZalecana konfiguracja dla PC: Procesor Pentium® 1 GHz, lub lepszy
RAM 512MB, lub wiêcejMicrosoft® Windows 2000, XP lub VistaMicrosoft® Internet Explorer 5.5, lub nowszy
14

15
Ilustracje, opisy i dane techniczne nie s¹ wi¹¿¹ce i mog¹ ulec zmianie.Drukowano w Polsce - Copyright Leica Geosystems AG, Heerbrugg, Switzerland, 2009.III.09 – RVA
Leica Geosystems Sp. z o.o.ul. Jutrzenki 118, 02-230 WarszawaTel.: +48 22 260 50 00Fax.: +48 22 260 50 10www.leica-geosystems.pl
Dalmierz (IR)ATR i PowerSearchLaser klasy 1 zgodnie zIEC 60825-1 resp. EN 60825-1
Pionownik laserowyLaser klasy 2 zgodnie zIEC 60825-1 resp. EN 60825-1
Dalmierz (bezreflektorowy):Laser klasy 3R zgodnie zIEC 60825-1 resp. EN 60825-1
Zawsze, gdy obs³ugujesz budowê drapacza chmur lub tunelu, monitorujesz ruchy wulkanu lub obiektów na placu budowy - potrzebujesz wiarygodnych danych. Leica Geosystems oferuje pe³ny zakres innowacyjnych rozwi¹zañ przeznaczonych do pomiarów precyzyjnych, które zapewniaj¹ bezprecedensow¹ dok³adnoœæ, jakoœæ i wydajnoœæ pomiaru. Z Leica Geosystems ¿adne zadanie nie bêdzie zbyt trudne, urzeczywistnij swoj¹ wizjê sukcesu.
Klienci Leica Geosystems korzystaj¹ z us³ug i wsparcia technicznego, które rozci¹gaj¹ siê na wszystkie strefy czasowe i geograficzne. Dziêki prawdziwemu partnerstwu - naszym zobowi¹zaniem jest stale zapewniaæ wysoki poziom wspó³pracy, którego oczekujesz gdy ufasz Leica Geosystems.
When it has to be right.






![Nietzsche [tryb zgodności]](https://static.fdocuments.pl/doc/165x107/587608a71a28ab18398b7a2f/nietzsche-tryb-zgodnosci.jpg)
![(prez7 [tryb zgodności])](https://static.fdocuments.pl/doc/165x107/61bd063261276e740b0e93e9/prez7-tryb-zgodnoci.jpg)


![DUW 01 [tryb zgodności]](https://static.fdocuments.pl/doc/165x107/586c69481a28ab237a8bb7dc/duw-01-tryb-zgodnosci.jpg)


![) [mm] [inch] [mm] Rozwalcówki [inch] [mm] mit 3 ...](https://static.fdocuments.pl/doc/165x107/626f174697994f6097430080/-mm-inch-mm-rozwalcwki-inch-mm-mit-3-.jpg)
