
Kwartalnik Energetyków Acta Energetica nr 01/2009
96
02/2011 numer 7/rok 3 Kwartalnik Naukowy Elektroenergetyków nergetica act
description
Acta Energetica to kwartalnik naukowy poświęcony tematyce energetyki. Jego wydawcą jest ENERGA SA, a patronem Politechnika Gdańska.
Transcript of Kwartalnik Energetyków Acta Energetica nr 01/2009

02/2011 numer 7/rok 3
Kwartalnik Naukowy Elektroenergetykównergeticaact

ENERGA SA
www.actaenergetica.org
naukowa
Korekta
o
ENERGA SA

4
12
22
32
44
54
66
74
82
w numerze
PRZECIWDZIAŁANIE UKŁADÓW SVC ROZWOJOWI AWARII NAPIĘCIOWEJdr inż. Robert Kowalak
INDUKCYJNE ALGORYTMY OPTYMALIZACJI ŚRODKÓW KOMPENSACJI MOCY BIERNEJ W KSEdr inż. Robert Lis, dr inż. Grzegorz Błajszczak
PRACA UKŁADU WZBUDZENIA I REGULACJI NAPIĘCIA GENERATORA SYNCHRONICZNEGO W STANACH NIESYMETRYCZNYCHdr hab. inż. Krzysztof Madajewski, profesor Instytutu Energetyki, mgr inż. Robert Rink
MOŻLIWOŚCI OCENY BIEŻĄCEGO STANU STABILNOŚCI SEE. POCHODNE ZAMIAST CHARAKTERYSTYKdr inż. Kazimierz Oziemblewski, mgr inż. Ksawery Opala
OCENA STABILNOŚCI KĄTOWEJ SYSTEMU ELEKTROENERGETYCZNEGO NA PODSTAWIE ANALIZY WYBRANYCH STANÓW ZAKŁÓCENIOWYCHdr hab. inż. Stef an Paszek, prof. nadzw. Politechniki Śląskiej, mgr inż. Piotr Pruski
METODA LINIOWEJ OPTYMALIZACJI DOPUSZCZALNEJ GENERACJI WIATROWEJ W WĘZŁACH SIECI PRZESYŁOWEJprof. dr hab. inż. Marian Sobierajski, dr inż. Wilhelm Rojewski,mgr inż. Sebastian Słabosz
WYKORZYSTANIE ALGORYTMU TABU SEARCH DO LOKALIZACJI BATERII KONDENSATORÓW W SIECI ELEKTROENERGETYCZNEJmgr inż. Paweł Wicher, prof. dr hab. inż. Kazimierz Wilkosz
WPŁYW ZAKŁÓCEŃ W SIECI ELEKTROENERGETYCZNEJ NA MOMENTY SKRĘTNE W WALE TURBOZESPOŁU DUŻEJ MOCYdr inż. Józef Wiśniewski
ZASTOSOWANIE FORMATU CIM W MODELOWANIU SIECI ELEKTROENERGETYCZNEJ W SYSTEMIE SYNDIS-PLANSdr inż. Zbigniew Zdun, mgr inż. Marek Wawrzyniak


Stabilność jest jednym z podstawowych pojęć odnoszących się do systemów dynamicznych. Jest ona związana ze zdolnością powrotu systemu do stanu równowagi po jej naruszeniu. I w tym sensie określa zdolność systemu do pracy. W systemach elektroenergetycznych wyróżnia się następujące rodzaje stabilności: lokalną, globalną i napięciową, przy czym używane są tu również inne określenia.
W zależności od rodzaju systemu elektroenergetycznego, tj. struktury i parametrów sieci, typu i lokalizacji układów regulacji źródeł energii (tj. obiektów z regulatorami) oraz typu i lokalizacji odbiorów energii, zapas sta-bilności systemu, rozumiany jako odległość bieżącego punktu pracy od stanu pracy, w którym następuje utrata stabilności, dla różnych (wymienionych powyżej) rodzajów stabilności jest różny.
W krajowym systemie elektroenergetycznym problem stabilności lokalnej i globalnej nie jest obecnie problemem przyciągającym szczególną uwagę operatora systemu. Duże jednostki wytwórcze napędzane turbi-nami parowymi, dominujące w systemie, wyposażone są w stabilizatory systemowe zapewniające odpowiednie tłumienie kołysań elektromechanicznych. Wpływ małych źródeł energii na stabilność lokalną i globalną jest pomijalnie mały.
Należy się jednak spodziewać, że rozwój terytorialny zachodnioeuropejskiego obszaru synchronicznego, do którego należy system polski, jak i zmiana struktury źródeł wytwórczych w tym obszarze (wzrost nasycenia tzw. generacją rozporoszoną) z wysokim prawdopodobieństwem zmienią ten stan. Problem stabilności lokalnej i globalnej stanie się wówczas aktualny. Warto pamiętać, że problem ten jest natomiast nieustająco aktualny w systemach wyspowych.
Do zagadnień przyciągających uwagę operatorów systemu krajowego (i nie tylko krajowego) należy na-tomiast obecnie problem stabilności napięciowej. Problem ten wiąże się w dużym stopniu z niedoinwestowa-niem strukturalnym sieci elektroenergetycznych. W tym jednak przypadku, w przeciwieństwie do wymienionego powyżej problemu stabilności lokalnej i globalnej, wzrost nasycenia systemu elektroenergetycznego źródłami energii może prowadzić do usztywnienia napięciowego węzłów systemu i tym samym do wzrostu zapasu sta-bilności napięciowej. Będzie to jednak w istotnym stopniu zależało od cech tych źródeł energii w zakresie gene-racji mocy biernej oraz od stosowanych zasad sterowania. Praca tych źródeł energii w trybie regulacji napięcia lub włączenie ich w układy nadrzędnej regulacji napięcia węzłów powinny prowadzić do uzyskania najwięk-szych efektów pozytywnych (największego wzrostu zapasu stabilności napięciowej). Natomiast praca tych źródeł w trybie regulacji współczynnika mocy równego cosϕ = 1, co jest obecnie praktykowane w przypadku małych (rozproszonych) źródeł energii, przyniesie efekt najmniejszy.
Niniejszy numer poświęcony jest zatem problemowi stabilności systemów elektroenergetycznych i zwią-zanym z nim zagadnieniom sterowania elementami tych systemów. Zapraszam do lektury.
prof. dr hab. inż. Zbigniew Lubośnyredaktor naczelny Acta Energetica
4Robert Kowalak / Politechnika Gdańska
Autorzy / Biografie
Robert KowalakGdańsk / Polska
Ukończył studia na Wydziale Elektrotechniki i Automatyki Politechniki Gdańskiej (2000). Stopień naukowy doktora nauk technicznych uzyskał na swoim macierzystym wydziale (2005). Obecnie pracuje w Katedrze Elektroenergetyki Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej na stanowisku adiunkta. Jego zawodowe zainte-resowania obejmują: układy energoelektroniczne dużych mocy (FACTS, HVDC), modelowanie pracy układów energoelektronicznych w systemie elek-troenergetycznym, współpracę układów zasilania z elektroenergetyką trakcyjną.

5
PRZECIWDZIAŁANIE UKŁADÓW SVC ROZWOJOWI AWARII NAPIĘCIOWEJ
dr inż. Robert Kowalak / Politechnika Gdańska
1. WSTĘP
Na przestrzeni ostatnich kilku lat, na obszarze naszego Krajowego Systemu Elektroenergetycznego (KSE) miało miejsce kilka awarii charakteryzujących się przede wszystkim problemami z utrzymaniem właściwych po-ziomów napięć. Wiele wskazuje na to, że podstawową przyczyną tego zjawiska był pojawiający się w sieci zna-czący deficyt mocy biernej. Powstanie deficytu mocy biernej w systemie może zostać zainicjowane załączeniem w danym obszarze systemu dużej liczby odbiorów lub/i wyłączeniem jednego lub kilku elementów sieci zasila-jącej związanym z wystąpieniem zwarcia lub uszkodzenia takiego elementu. Jedną z możliwości ograniczenia niebezpieczeństwa powstania deficytu mocy biernej, a więc tym samym rozwoju awarii napięciowej, jest wpro-wadzenie do układu zasilania dodatkowych źródeł mocy biernej – kompensatorów. W KSE najczęściej spotykane są kompensatory statyczne bocznikowe w postaci kondensatorów i dławików załączanych łącznikami elektrome-chanicznymi. Jedną z ich wad jest brak możliwości prowadzenia regulacji w stanach szybkozmiennych. Wady tej nie mają najnowocześniejsze z kompensatorów bocznikowych stosowanych na świecie: układy SVC (ang. Static Var Compensator), STATCOM (ang. Static Compensator) oraz SVC na bazie STATCOM, wszystkie należące do rodziny układów FACTS (ang. Flexible Alternating Current Transmission Systems).
Spośród wymienionych nowoczesnych układów kompensatorów najprawdopodobniej układy SVC znajdą się w KSE jako pierwsze. Niniejszy artykuł prezentuje wyniki badań modelowych pracy układów SVC uzyskane w ramach prac [4, 5, 6], związanych z badaniem wpływu energoelektronicznych kompensatorów statycznych na pracę systemu elektroenergetycznego w czasie awarii napięciowej. Badania te wykonano w programie DIgSI-LENT PowerFactory 13.2.
2. UKŁADY SVC
Pierwszy na świecie układ SVC na napięcie powyżej 100 kV został uruchomiony w 1977 roku. Był on prze-znaczony do regulacji napięcia na szynach 138 kV [2].
Układy tego typu posiadają w swojej strukturze elementy bierne w postaci kondensatorów i dławików załączanych do sieci za pośrednictwem łączników półprzewodnikowych. Dodatkowym elementem są też filtry wyższych harmonicznych niezbędne do pracy niektórych odmian SVC. W układach włączanych do sieci wysokich napięć standardowym elementem są też transformatory obniżające napięcie. Na rys. 1 przedstawiono przykła-dową strukturę układu SVC.
Przeciwdziałanie układów SVC rozwojowi awarii napięciowej
Streszczenie
Artykuł prezentuje wyniki badań modelowych, mających na celu analizy zachowania się kompensato-rów statycznych SVC w systemie elektroenergetycznym. Podstawowym stanem, który analizowano, było zacho-
wanie się kompensatorów zainstalowanych w wybranych węzłach systemu w czasie awarii napięciowej. W artykule zaprezentowano wybrane wyniki przeprowadzonych badań w ramach realizacji prac [4, 5, 6].

6
Rys. 1. Przykładowa struktura kompensatora SVC na przykładzie układu TCR-TSC-FC: USS – układ sterowania susceptancją, RU – regu-lator napięcia, TR – transformator WN/SN, α – kąt zapłonu tyrystorów TCR, UTz – napięcie zadane, UT – napięcie kontrolowane, Ik – prąd kompensatora
Układy SVC cechuje budowa modułowa, dzięki czemu możemy tworzyć różne warianty tego układu. W praktyce stosowanych jest kilka odmian tych układów. Nazwa każdej z nich związana jest z modułami, które w niej wykorzystano [1, 3, 7, 8, 9, 10, 11]. Najbardziej ogólny podział tych układów pozwala na wyróżnienie wśród nich układów o regulacji dyskretnej i o regulacji ciągłej.
Jedną z najprostszych, pod względem konfiguracji, odmian SVC jest układ TSC. TSC (ang. Thyristor Swit-ched Capacitor) to kondensator załączany tyrystorowo. SVC typu TSC składa się przynajmniej z jednej (ale co najwyżej kilku) współpracujących ze sobą sekcji TSC. Każda z sekcji TSC jest załączana/wyłączana zależnie od wartości mocy biernej, jaką układ ma dostarczać. Układy te z powodzeniem mogą zastępować tradycyjne baterie kondensatorów do kompensacji mocy biernej załączane łącznikami elektromechanicznymi.
Drugą z odmian stanowią układy SVC typu TSR i TCR. TSR (ang. Thyristor Switched Reactor) to dławik załączany tyrystorowo, natomiast TCR (ang. Thyristor Controlled Reactor) jest dławikiem o tyrystorowo re-gulowanej indukcyjności. Struktura sekcji tych układów jest podobna, inny jest natomiast sposób sterowania. Kompensatory tych typów zazwyczaj składają się z jednej lub kilku trójfazowych sekcji. W przypadku układów SVC typu TSR łączniki tyrystorowe każdej sekcji są załączane lub wyłączane w zależności od mocy biernej, jaką ma pobierać SVC. Ten układ zapewnia tylko skokową regulację mocy biernej. Układ TCR natomiast umożliwia regulację poboru mocy biernej w sposób ciągły poprzez sterowanie kątem zapłonu tyrystorów, wchodzących w skład każdego członu. Układy SVC typu TSR z powodzeniem mogą zastępować tradycyjne dławiki (z łącznikami elektromechanicznymi) do kompensacji mocy biernej. Układów SVC typu TCR nie stosuje się do pracy samo-dzielnej ze względu na wprowadzanie przez nie do sieci zasilającej wyższych harmonicznych, natomiast wchodzą one w skład innych wariantów SVC.
Kolejna z odmian SVC to układ TCR-FC. Układ ten tworzą dwa rodzaje elementów: regulowane dławiki TCR oraz stałe kondensatory FC (ang. Fixed Capacitors), do których zalicza się również filtry wyższych harmonicznychmające charakter pojemnościowy, stanowiące niezbędny element z punktu widzenia eliminacji zakłóceń powodo-wanych pracą układów TCR. Moc bierna tego układu wynika z wypadkowej mocy filtrów oraz mocy dławika i jestregulowana w sposób ciągły. Układy tego typu znalazły największe zastosowanie do ograniczania oddziaływania na sieć elektroenergetyczną takich odbiorców, którzy charakteryzują się wprowadzaniem zakłóceń napięcia po-wodowanych dużą dynamiką zmian pobieranej mocy, jak również wprowadzaniem wyższych harmonicznych.
Odmianą SVC uznawaną za najważniejszą z punktu widzenia sieci zasilającej jest układ TCR-TSC -FC. W skład układu wchodzą dławiki TCR, baterie kondensatorów TSC i układy filtrów załączonych na stałe (FC). Strukturętakiego układu przedstawia rys. 1. Moc bierna tego układu jako całego kompensatora typu SVC jest wypadkową pomiędzy mocą pracujących członów TCR a mocą załączonych członów TSC oraz filtrów wyższych harmonicz-nych. Układy tego typu znalazły przede wszystkim zastosowanie do regulacji napięć i poziomów mocy biernej w sieciach wysokich napięć.
WN
SNRU
USS
Filtry TCR TSC
UTz
UT
Ik
TR
α
zał.wył.
Robert Kowalak / Politechnika Gdańska

7
Ostatnią odmianę SVC stanowią układy TSR-TCR, zawierające w swojej strukturze człony TSR (załączane łącznikami tyrystorowymi dławiki) oraz TSC (załączane łącznikami tyrystorowymi kondensatory). Układy tego typu znalazły zastosowanie do regulacji poziomów napięć i mocy biernej w sieciach wysokich napięć.
3. ODDZIAŁYWANIE SVC W PROSTYCH UKŁADACH ZASILANIA
W celu określenia, jak w stosunkowo prostych układach zasilania wpłynie zainstalowanie kompensatora SVC na przebieg awarii napięciowej, wykonano badania symulacyjne w układzie zaprezentowanym na rys. 2. Przyjęcie takiej struktury sieci pozwalało na uzyskanie kilku różnych układów połączeń, uzyskiwanych w wyniku przełączania pomiędzy różnymi szynami kompensatorów, odbiorów, oraz poprzez zamykanie i otwieranie po-szczególnych sprzęgieł łączących ze sobą szyny w danym węźle.
W prezentowanym układzie do badań przyjęto, że moc zwarciowa systemu elektroenergetycznego wynosi 7000 MVA, linie mają długości po 100 km, generatory elektrowni pracują z obciążeniem w przedziale 80–100% swojej mocy znamionowej czynnej (równej 200 MW), a napięcia zadane w elektrowni dobrano tak, aby przy generacji mocy czynnej na poziomie 90% mocy znamionowej wszystkie generatory obciążały się podobną mocą bierną. W układzie zamodelowano pracę kompensatorów SVC o mocy +100/-30 MVA oraz +200/-60 MVA, skła-dających się z jednego członu TCR i czterech członów TSC. Awarię napięciową zamodelowano jako zmniejszanie się napięcia systemu o 100–60% wartości znamionowej z szybkością 0,1%/s (0, 4 kV/s).
Badania rozpoczęto od analizy pracy układu zasilania o konfiguracji pokazanej na rys. 2 w czasie awariinapięciowej. Rozpatrywano pracę układu bez SVC oraz z SVC o mocy znamionowej 100 MVA i 200 MVA. Jako zo-brazowanie uzyskanych wyników symulacji na rysunkach 3 i 4 zaprezentowano przebiegi uzyskane przy założeniu generacji elektrowni na poziomie 90% mocy czynnej znamionowej.
Rys. 3 prezentuje zmiany napięć zachodzące w poszczególnych węzłach badanego układu. Natomiast rys. 4 przed-stawia zachodzące zmiany mocy biernej generatorów elektrowni i kompensatora. Kolejne krzywe, licząc od lewej, uzyskano dla układu bez kompensatora, z SVC o mocy 100 MVA i z SVC o mocy 200 MVA. W zaprezentowanym przypadku utrata przez generatory elektrowni synchronizmu następuje w chwili, gdy napięcie osiąga 72% wartości znamionowej. Obecność w układzie mniejszego z kompensatorów pozwala na pracę układu do momentu, gdy napięcie systemu osiąga wartość 69,9% Un, a większego do chwili, gdy napięcie osiąga 67,6% Un. W generatorach w układzie z kompensatorem później też zaczynają działać ograniczniki prądu wirnika, co widoczne jest na krzywych mocy biernej generatorów. Na prezentowanych rysunkach widoczne są nieduże zaburzenia, będące efektem skokowego załączania kolejnych sekcji TSC. Jak należało ocze-kiwać, najmniejszy wpływ wywierała praca kompensatora na „poprawę” w trakcie awarii napięcia w węźle systemowym. Ponadto kompensator jest tym elementem w tym układzie, który jako pierwszy wyczerpuje zdolności regulacyjne napięcia, co wynika z zakresu nastawionego napięcia, statyzmu, ale przede wszystkim z umiejscowienia SVC względem miejsca awa-
Komp.
SEE
L2a
L2b
L1a
L1b
G1
G2
G3
G4
TB1
TB2
TB3
TB4
TS1 TS2
El. A
El. B
Sta
cja_
Kom
p/41
5
Sta
cja_
1/41
5
Sta
cja_
Kom
p/42
5
Ele
ktro
wni
a(A
)/415
Ele
ktro
wni
a(A
)/425
Ele
ktro
wni
a(B
)/215
Ele
ktro
wni
a(B
)/225
Odb.
Rys. 2. Konfiguracja modelowanego układu
Przeciwdziałanie układów SVC rozwojowi awarii napięciowej
8
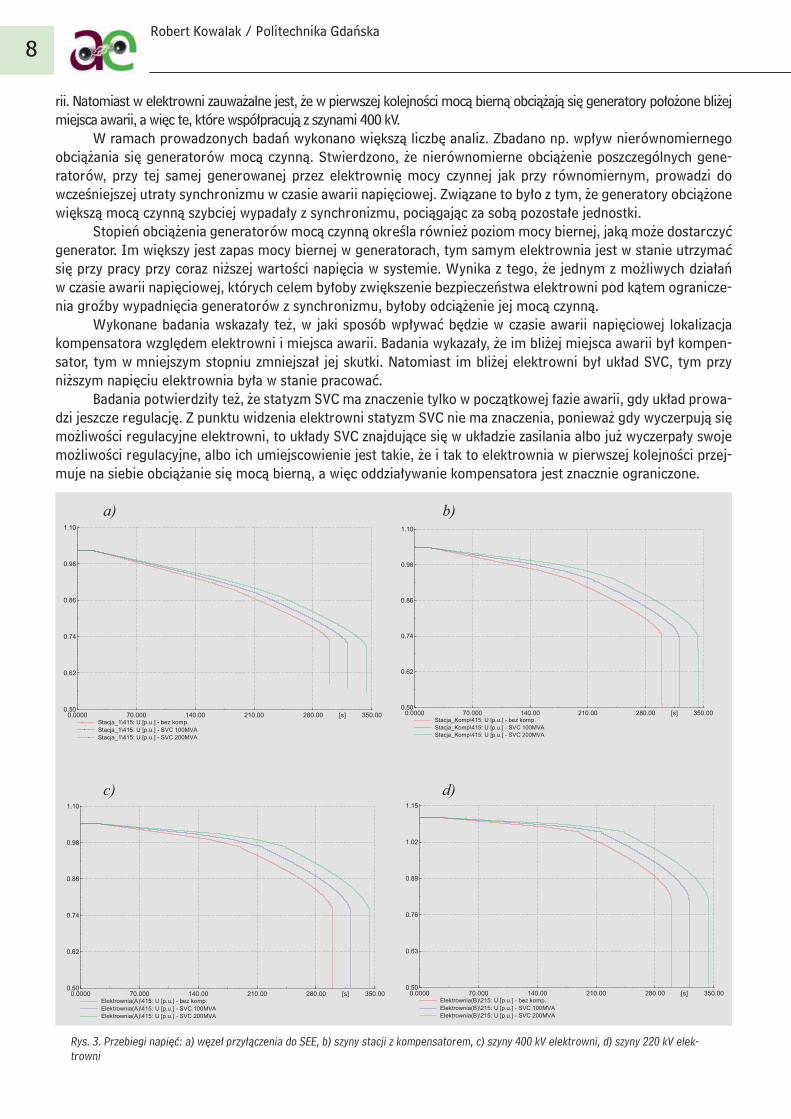
rii. Natomiast w elektrowni zauważalne jest, że w pierwszej kolejności mocą bierną obciążają się generatory położone bliżej miejsca awarii, a więc te, które współpracują z szynami 400 kV.
W ramach prowadzonych badań wykonano większą liczbę analiz. Zbadano np. wpływ nierównomiernego obciążania się generatorów mocą czynną. Stwierdzono, że nierównomierne obciążenie poszczególnych gene-ratorów, przy tej samej generowanej przez elektrownię mocy czynnej jak przy równomiernym, prowadzi do wcześniejszej utraty synchronizmu w czasie awarii napięciowej. Związane to było z tym, że generatory obciążone większą mocą czynną szybciej wypadały z synchronizmu, pociągając za sobą pozostałe jednostki.
Stopień obciążenia generatorów mocą czynną określa również poziom mocy biernej, jaką może dostarczyć generator. Im większy jest zapas mocy biernej w generatorach, tym samym elektrownia jest w stanie utrzymać się przy pracy przy coraz niższej wartości napięcia w systemie. Wynika z tego, że jednym z możliwych działań w czasie awarii napięciowej, których celem byłoby zwiększenie bezpieczeństwa elektrowni pod kątem ogranicze-nia groźby wypadnięcia generatorów z synchronizmu, byłoby odciążenie jej mocą czynną.
Wykonane badania wskazały też, w jaki sposób wpływać będzie w czasie awarii napięciowej lokalizacja kompensatora względem elektrowni i miejsca awarii. Badania wykazały, że im bliżej miejsca awarii był kompen-sator, tym w mniejszym stopniu zmniejszał jej skutki. Natomiast im bliżej elektrowni był układ SVC, tym przy niższym napięciu elektrownia była w stanie pracować.
Badania potwierdziły też, że statyzm SVC ma znaczenie tylko w początkowej fazie awarii, gdy układ prowa-dzi jeszcze regulację. Z punktu widzenia elektrowni statyzm SVC nie ma znaczenia, ponieważ gdy wyczerpują się możliwości regulacyjne elektrowni, to układy SVC znajdujące się w układzie zasilania albo już wyczerpały swoje możliwości regulacyjne, albo ich umiejscowienie jest takie, że i tak to elektrownia w pierwszej kolejności przej-muje na siebie obciążanie się mocą bierną, a więc oddziaływanie kompensatora jest znacznie ograniczone.
a) b)
c) d)
Rys. 3. Przebiegi napięć: a) węzeł przyłączenia do SEE, b) szyny stacji z kompensatorem, c) szyny 400 kV elektrowni, d) szyny 220 kV elek-trowni
350.00280.00210.00140.0070.0000.0000 [s]
1.10
0.98
0.86
0.74
0.62
0.50
Stacja_1\415: U [p.u.] - bez komp.Stacja_1\415: U [p.u.] - SVC 100MVAStacja_1\415: U [p.u.] - SVC 200MVA
350.00280.00210.00140.0070.0000.0000 [s]
1.10
0.98
0.86
0.74
0.62
0.50
Stacja_Komp\415: U [p.u.] - bez komp.Stacja_Komp\415: U [p.u.] - SVC 100MVAStacja_Komp\415: U [p.u.] - SVC 200MVA
350.00280.00210.00140.0070.0000.0000 [s]
1.10
0.98
0.86
0.74
0.62
0.50
Elektrownia(A)\415: U [p.u.] - bez komp.Elektrownia(A)\415: U [p.u.] - SVC 100MVAElektrownia(A)\415: U [p.u.] - SVC 200MVA
350.00280.00210.00140.0070.0000.0000 [s]
1.15
1.02
0.89
0.76
0.63
0.50
Elektrownia(B)\215: U [p.u.] - bez komp..Elektrownia(B)\215: U [p.u.] - SVC 100MVAElektrownia(B)\215: U [p.u.] - SVC 200MVA
Robert Kowalak / Politechnika Gdańska

9
4. PRACA UKŁADÓW SVC W KSE
W celu zbadania wpływu układów SVC na pracę systemu w czasie awarii napięciowej opracowano, na podstawie danych udostępnionych na potrzeby badań [4, 5, 6], model KSE w programie DIgSILENT PowerFactory. Na podstawie analizy zmian napięć zachodzących w czasie normalnej pracy w węzłach dla różnych stanów obciążenia systemu oraz po określeniu podatności napięciowej węzłów na wzrost obciążenia mocą bierną wytypowano węzły, w których wska-zane byłoby zainstalowanie kompensatorów. Na podstawie parametrów tych węzłów i zakresu zachodzących w nich zmian napięcia dokonano doboru mocy układów SVC. W tab. 1 zestawiono węzły i moce przyjętych układów SVC.
Tab. 1. Zestawienie parametrów dobranych kompensatorów
Węzeł uzad [p.u.] Qind [MVAr] Qpoj [MVAr]
MOR211 1,025 -250 250PLE214 1,021 -155 185GRU215 1,042 -135 185MKR212 1,072 -45 115GDA215 1,039 -100 100NAR411 1,011 -65 85OLM415 1,015 -70 70LES114 1,071 -10 60GZC114 1,064 -10 50NOT114 1,047 -15 30CSK115 1,045 -15 25REC124 1,084 -5 20ZLC115 1,045 -5 10
a) b)
c)
Rys. 4. Przebiegi mocy biernej: a) generatory G1 i G2, b) generatory G3 i G4, c) kompensator
350.00280.00210.00140.0070.0000.0000 [s]
120.
96.0
72.0
48.0
24.0
0.00
G1: Q [MVAr] - bez komp.G2: Q [MVAr] - bez komp.G1: Q [MVAr] - SVC 100MVAG2: Q [MVAr] - SVC 100MVAG1: Q [MVAr] - SVC 200MVAG2: Q [MVAr] - SVC 200MVA
350.00280.00210.00140.0070.0000.0000 [s]
120.
96.0
72.0
48.0
24.0
0.00
G3: Q [MVAr] - bez komp.G4: Q [MVAr] - bez komp.G3: Q [MVAr] - SVC 100MVAG4: Q [MVAr] - SVC 100MVAG3: Q [MVAr] - SVC 200MVAG4: Q [MVAr] - SVC 200MVA
350.00280.00210.00140.0070.0000.0000 [s]
240.
190.
140.
90.0
40.0
-10.0
TR 120MVA 420kV/15.75kV: Q [MVAr] - SVC 100MVATR 240MVA 420kV/15.75kV: Q [MVAr] - SVC 200MVA
Przeciwdziałanie układów SVC rozwojowi awarii napięciowej

10
400.00300.00200.00100.000.00 [s]
1.10
1.00
0.90
0.80
0.70
0.60
MOR211: Voltage, Magnitude in p.u.MOR111: Voltage, Magnitude in p.u.MOR121: Voltage, Magnitude in p.u.
400.00300.00200.00100.000.00 [s]
1.10
1.00
0.90
0.80
0.70
0.60
MOR211: Voltage, Magnitude in p.u.MOR111: Voltage, Magnitude in p.u.MOR121: Voltage, Magnitude in p.u.
W ramach prowadzonych badań modelowano awarię napięciową w określonych obszarach KSE. Awarię wymuszano poprzez stopniowe zwiększanie pobieranej przez odbiory mocy biernej w danym obszarze. Badania wykonano dla kilku obszarów, ale poniżej zaprezentowano tylko przykładowe wyniki uzyskane dla zamodelowa-nia awarii napięciowej w obszarze Warszawy.
Pierwszy z prezentowanych rysunków (rys. 5) pokazuje zachodzące zmiany napięć w węźle MOR pod War-szawą. Obecność kompensatorów, jak wskazują uzyskane przebiegi, przyczynia się do poprawy warunków na-pięciowych. Widać to po czasie, w którym napięcie w analizowanej sieci osiągnęło najniższą z rozpatrywanych wartości, czyli 50% Un (zakończenie obliczeń). Widać również, że napięcie w końcowej fazie osiąga w tym węźle wartości wyższe wówczas, gdy pracuje tam kompensator. Przy tym samym poborze przez odbiory mocy biernej napięcia w układzie osiągają wyższe wartości.
a) b)
Rys. 5. Poziomy napięć w stacji MOR: a) układ bez SVC; b) układ z SVC
W czasie awarii napięciowej ważna jest praca elektrowni. Dla Warszawy najbliższymi elektrowniami są Ko-zienice, Ostrołęka (stacja OST), Bełchatów, Pątnów i Konin. Na rys. 6 pokazano zmiany napięcia na szynach stacji OST, a na rys. 7 kształtowanie się obciążenia generatorów mocą bierną w tym węźle. Dwie najmniejsze jednostki szybko osiągały ograniczenie mocy biernej. Natomiast w przypadku pozostałych jednostek widać wyraźnie wol-niejsze obciążanie się ich mocą bierną w układzie z SVC. Najmocniej i najszybciej mocą bierną przy tej awarii zaczęły obciążać się elektrownie Ostrołęka i Kozienice, a w mniejszym stopniu pozostałe.
Rys. 6. Poziomy napięć w stacji OST: a) układ bez SVC, b) układ z SVC
400.00300.00200.00100.000.00 [s]
1.08
1.06
1.04
1.02
1.00
OST211: Voltage, Magnitude in p.u.OST111: Voltage, Magnitude in p.u.
400.00300.00200.00100.000.00 [s]
1.0800
1.0640
1.0480
1.0320
1.0160
1.0000
OST211: Voltage, Magnitude in p.u.OST111: Voltage, Magnitude in p.u.
a) b)
Robert Kowalak / Politechnika Gdańska

11
BIBLIOGRAFIA
Rys. 7. Poziomy mocy biernej generatorów w stacji OST: a) układ bez SVC, b) układ z SVC
Dokonując analizy pracy elektrowni, należy zaznaczyć, że obciążały się one mocą bierną wolniej, gdy w układzie pracowały kompensatory. Związane to było z podziałem generacji mocy biernych pomiędzy elektrownie i kompensatory.
5. PODSUMOWANIE
Kompensatory typu SVC należą do układów nadążnych. Jak wykazały przeprowadzone badania, ich od-działywanie w czasie awarii napięciowej może być dosyć istotne z punktu zapewnienia bezpieczeństwa elek-troenergetycznego systemu. Dodatkową ich cechą, niepozostającą bez znaczenia dla systemu, jest możliwość prowadzenia procesów regulacyjnych również w stanach o większej dynamice zachodzących zmian.
W czasie awarii napięciowej każde dodatkowe źródło mocy biernej jest cenne. Ich obecność nie tylko po-zwala na podniesienie wartości napięcia w stosunku do sytuacji, gdy kompensatorów nie ma, ale również może przyczynić się do uchronienia pracujących elektrowni przed utratą stabilności i w następstwie tego wypadnię-ciem jej bloków wytwórczych z pracy synchronicznej z siecią.
1. Faruque M.O., Dinahavi V., Santoso S., Adapa R., Review of Electromagnetic Transient Models for Non-VSC FACTS, IEEE Transactions on Power Delivery, vol. 20, no. 2, April 2005.
2. Hingorani N. G., Flexible ac transmission, IEEE SPECTRUM, April 1993. 3. Kodsi S.K.M., Cañizares C.A., Kazerani M., Rective current control through SVC for load power factor correction,
Electric Power System Research 76, 2006.4. Kowalak R., Badania wpływu kompensatorów statycznych zainstalowanych w określonych punktach systemu na roz-
wój awarii napięciowej, PROJEKT BADAWCZY ZAMAWIANY nr PBZ-MEiN-1/2/2006 „BEZPIECZEŃSTWO ELEKTROENER-GETYCZNE KRAJU”, Konsorcjum Politechnik: Gdańskiej, Śląskiej, Warszawskiej i Wrocławskiej, raport z realizacji zadania 6.1.1.C2, 2009 (niepublikowany).
5. Kowalak R., Model systemu elektroenergetycznego z elementami energoelektronicznymi, PROJEKT BADAWCZY ZA-MAWIANY nr PBZ-MEiN-1/2/2006 „BEZPIECZEŃSTWO ELEKTROENERGETYCZNE KRAJU”, Konsorcjum Politechnik: Gdań-skiej, Śląskiej, Warszawskiej i Wrocławskiej, raport z realizacji zadania 3.1. 4, 2008 (niepublikowany).
6. Kowalak R., Współpraca układów kompensatorów statycznych z jednostkami wytwórczymi w czasie lawiny napię-ciowej, PROJEKT BADAWCZY ZAMAWIANY nr PBZ-MEiN-1/2/2006 „BEZPIECZEŃSTWO ELEKTROENERGETYCZNE KRAJU”, Konsorcjum Politechnik: Gdańskiej, Śląskiej, Warszawskiej i Wrocławskiej, raport z realizacji zadania 6.1.1.C2, 2009 (nie-publikowany).
7. Materiały informacyjne: AMSCTM SVC Static Var Compensator, American Superconductor Corporation, 2008.8. Materiały informacyjne: Modelling of SVC in Power System Studies, ABB Power Systems AB, information NR 500-026E, April 1996.9. Materiały informacyjne, Power Transmission and Distribution, Discover the World of FACTS Technology, Technical
Compendium, SIEMENS AG Power Transmission and Distribution High Voltage Division, no E50001-U131-A99-X-7600.10. Materiały informacyjne, SVC Configuration Optimisation, Nokian Capacitors Ltd., EN-TH18-03/2007, 2007.11. Materiały informacyjne, Utility Static Var Compensator (SVC), Nokian Capacitors Ltd., EN-CS08-03/2007, 2007.
400.00300.00200.00100.000.00 [s]
160.00
120.00
80.00
40.00
0.00
-40.00
G_OSB_1_03: Reactive Power in MvarG_OSB_2_01: Reactive Power in MvarG_OSB_2_02: Reactive Power in MvarGS_OST111: Reactive Power in p.u.GS_OST121: Reactive Power in p.u.
400.00300.00200.00100.000.00 [s]
160.00
120.00
80.00
40.00
0.00
-40.00
G_OSB_1_03: Reactive Power in MvarG_OSB_2_01: Reactive Power in MvarG_OSB_2_02: Reactive Power in MvarGS_OST111: Reactive Power in p.u.GS_OST121: Reactive Power in p.u.
a) b)
Przeciwdziałanie układów SVC rozwojowi awarii napięciowej

12Robert Lis / Politechnika Wrocławska Grzegorz Błajszczak / Polskie Sieci Elektroenergetyczne Operator SA
Autorzy / Biografie
Grzegorz BłajszczakWarszawa / Polska
W latach 1984–1994 pracownik naukowy kolejno na Politechnice Warszawskiej, politechnice w Budapeszcie i na Uniwersytecie Rand Afrikaans w Johannesburgu. Specjalista ds. współpracy z zagranicą w Energoprojekcie-Warszawa SA (1994–1995), menedżer ds. napędów i rezerwowe-go zasilania we francuskiej firmie Schneider Electric (1995–1996), zastępca dyrektora ds. szkoleń i wdrożeń w Europejskim Oddziale Sterowania Pro-cesami firmy Westinghouse Electric (1996–1999). Od 1999 roku zatrudniony w Polskich Sieciach Elektroenergetycznych, obecnie PSE Operator SA, gdzie zajmował się usługami systemowymi, następnie rozliczeniami międzynarodowej wymiany energii, a obecnie zajmuje się wdrażaniem nowych technologii oraz jakością energii i zarządzaniem mocą bierną. Jest członkiem m.in.: SEP, IEEE, CIGRE, Eurelectric, KT w PKN, Komitetu NOT ds. Gospodarki Energetycznej, Polskiego Komitetu Jakości i Efektywnego Użytkowania Energii Elek-trycznej. Jest rzeczoznawcą w dziedzinie jakości energii elektrycznej, a także autorem ponad 100 publikacji naukowych i technicznych.
Robert LisWrocław / Polska
Adiunkt w Instytucie Energoelektryki Politechniki Wrocławskiej. Zajmuje się problemami nauko-wymi związanymi z planowaniem i sterowaniem systemów elektroenergetycznych. Opublikował ok. 90 prac dotyczących głównie probabilistycznych rozpływów mocy, stabilności napięciowej, stabilno-ści lokalnej i sztucznej inteligencji. Ostatnie prace dedykowane są głównie metodom szacowania bez-pieczeństwa przesyłu mocy sieciami najwyższych napięć, modelowaniu i symulacjom komputerowym stanów przejściowych w Matlabie oraz współpracy generacji rozproszonej z systemem elektroenerge-tycznym.

13Indukcyjne algorytmy optymalizacji środków kompensacji mocy biernej w KSE
INDUKCYJNE ALGORYTMY OPTYMALIZACJI ŚRODKÓW KOMPENSACJI MOCY BIERNEJ W KSE
dr inż. Robert Lis / Politechnika Wrocławska dr inż. Grzegorz Błajszczak / Polskie Sieci Elektroenergetyczne Operator SA
1. WSTĘP
Właściwe zarządzanie rozpływem mocy biernej jest dla operatorów sieci przesyłowej i dystrybucyjnej prio-rytetowym zadaniem, ze względu na bezpieczeństwo elektroenergetyczne kraju [1]. Celem kompensacji jest za-zwyczaj zmniejszenie przesyłów mocy biernej i związanych z tym strat przesyłowych w sieci. Najczęściej oznacza to wprowadzenie do sieci nowych źródeł (baterii kondensatorów), rzadziej odbiorów (dławików) mocy biernej dla osiągnięcia założonego celu. Jest to tzw. sztuczna kompensacja mocy biernej. W określonych przypadkach rzeczywistych sieci przynajmniej część efektów, uzyskiwanych w drodze sztucznej kompensacji mocy biernej, można pozyskać w sposób naturalny, poprzez dobór odpowiedniego układu pracy sieci, właściwe wykorzystanie mocy ładowania (np. kabli), wykorzystanie (regulowanie) mocy biernej maszyn synchronicznych (generatorów, silników). Do szczególnych rodzajów kompensacji mocy biernej zalicza się kompensację nadążną, realizowaną przez odbiory nieliniowe (np. hutnicze). Kompensację mocy biernej, w tym instalowanie nowych źródeł (od-biorów) oraz sterowanie mocą wszystkich źródeł mocy biernej w Krajowym Systemie Elektroenergetycznym (KSE), realizuje się na podstawie instrukcji ruchowych oraz licznych opracowań. Sposoby tam zawarte pozwalają na określenie strat mocy i energii oraz kosztów przesyłu energii w sieci przed kompensacją i po kompensacji. W złożonej, wielowęzłowej i wielonapięciowej sieci rzeczywistej KSE straty mocy zależą od wielu czynników:
• stosowanych układów pracy sieci i parametrów jej elementów• wielkości przesyłanych mocy czynnych i biernych• utrzymywanych poziomów napięcia• regulacji przekładni transformatorów.W niniejszej pracy zostanie omówiony algorytm optymalizacji sztucznych środków kompensacji mocy
biernej, wykorzystujący algorytmy indukcyjne – drzewa decyzyjne [1]. Drzewa decyzyjne stanowią podstawo-wą metodę indukcyjnego uczenia się maszyn, co spowodowane jest dużą efektywnością i możliwością prostej programowej implementacji. Ta metoda pozyskiwania wiedzy opiera się na analizie przykładów, przy czym każdy przykład musi być opisany przez zestaw atrybutów, gdzie każdy atrybut może przyjmować różne warto-ści. Odkrywanie wiedzy w bazach danych jest procesem odkrywania nowych korelacji, wzorców i trendów na podstawie dużych wolumenów danych przechowywanych w repozytoriach, wykorzystując technologie rozpo-znawania wzorców. Najważniejszy w tym procesie jest etap eksploracji danych (ang. data mining) oraz wyko-rzystanie właściwego algorytmu do znajdowania zależności i schematów w przygotowanym zbiorze danych. Opisana technika umożliwia we wszystkich możliwych układach pracy KSE znalezienie słabych węzłów i grupo-wanie ich w tzw. obszary VCAs (ang. Voltage Control Areas), na podstawie istotnych podobieństw w stanach powyłączeniowych [3].
Streszczenie
W pracy scharakteryzowano problemy związane z kompensacją środków mocy biernej, chroniących sieć przesyłową przed utratą stabilności napięciowej. Wolniej-sze formy niestabilności napięciowej analizowane są za pomocą symulacji rozpływów mocy. Symuluje się chwilo-we zachowanie systemu po zadanych wyłączeniach i wyznacza się krzywe P-U oraz Q-U w celu oszacowania w danej chwili zapasu stabilności napięciowej. Celem kompensacji jest zmniejszenie przesyłów mocy biernej
i związanych z tym strat przesyłowych w sieci. Najczęściej oznacza to wprowadzenie do sieci nowych źródeł mocy biernej dla osiągnięcia założonego celu. W artykule opisa-no algorytm optymalizacji sztucznych środków kompensa-cji mocy biernej, wykorzystujący drzewa decyzyjne, które stanową podstawową metodę indukcyjnego uczenia się maszyn, co spowodowane jest dużą efektywnością i możliwością prostej programowej implementacji.
14
2. WYZNACZANIE ZAPASU STABILNOŚCI NAPIĘCIOWEJ W SIECIACH PRZESYŁOWYCH
Na podstawie literatury przedmiotu [4, 5] można zauważyć pewne trendy światowe w dziedzinie określania zapasów mocy biernej i bezpiecznych granic napięć węzłowych z punktu widzenia stabilności napięciowej, i tak:
• rezerwy mocy biernej i dopuszczalne granice napięć są wyznaczane głównie w celu zapewnienia bez-piecznej pracy systemu elektroenergetycznego
• w czasie kierowania systemem celem sterowania rezerwami mocy biernej jest zapobieganie lawinie napięć i utrzymanie zmian napięć w bezpiecznych przedziałach
• główne trudności związane z modelowaniem systemu elektroenergetycznego dotyczą tu modelowania odbiorów i dlatego przyjmuje się zwykle konserwatywnie hipotezę o stałych wartościach mocy węzło-wych.
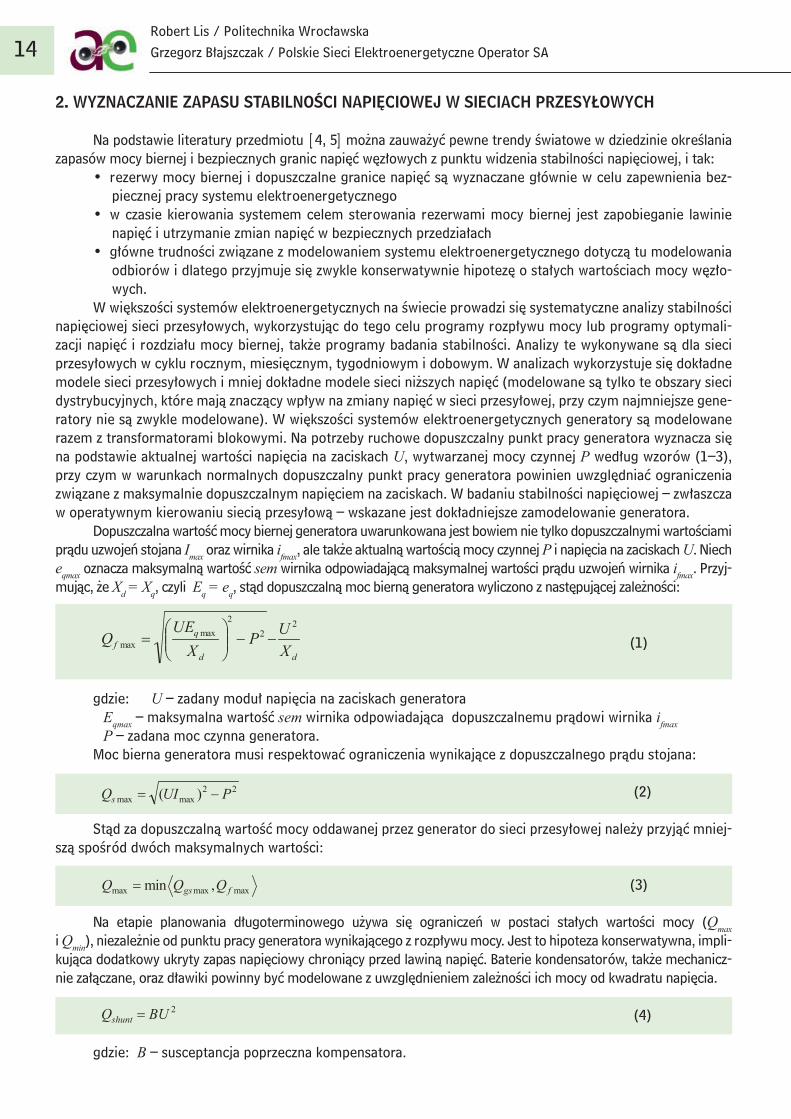
W większości systemów elektroenergetycznych na świecie prowadzi się systematyczne analizy stabilności napięciowej sieci przesyłowych, wykorzystując do tego celu programy rozpływu mocy lub programy optymali-zacji napięć i rozdziału mocy biernej, także programy badania stabilności. Analizy te wykonywane są dla sieci przesyłowych w cyklu rocznym, miesięcznym, tygodniowym i dobowym. W analizach wykorzystuje się dokładne modele sieci przesyłowych i mniej dokładne modele sieci niższych napięć (modelowane są tylko te obszary sieci dystrybucyjnych, które mają znaczący wpływ na zmiany napięć w sieci przesyłowej, przy czym najmniejsze gene-ratory nie są zwykle modelowane). W większości systemów elektroenergetycznych generatory są modelowane razem z transformatorami blokowymi. Na potrzeby ruchowe dopuszczalny punkt pracy generatora wyznacza się na podstawie aktualnej wartości napięcia na zaciskach U, wytwarzanej mocy czynnej P według wzorów (1–3), przy czym w warunkach normalnych dopuszczalny punkt pracy generatora powinien uwzględniać ograniczenia związane z maksymalnie dopuszczalnym napięciem na zaciskach. W badaniu stabilności napięciowej – zwłaszcza w operatywnym kierowaniu siecią przesyłową – wskazane jest dokładniejsze zamodelowanie generatora.
Dopuszczalna wartość mocy biernej generatora uwarunkowana jest bowiem nie tylko dopuszczalnymi wartościami prądu uzwojeń stojana Imax oraz wirnika ifmax, ale także aktualną wartością mocy czynnej P i napięcia na zaciskach U. Niech eqmax oznacza maksymalną wartość sem wirnika odpowiadającą maksymalnej wartości prądu uzwojeń wirnika ifmax. Przyj-mując, że Xd = Xq, czyli Eq = eq, stąd dopuszczalną moc bierną generatora wyliczono z następującej zależności:
dd
qf X
UPX
UEQ
22
2max
max
(1)
gdzie: U – zadany moduł napięcia na zaciskach generatora Eqmax – maksymalna wartość sem wirnika odpowiadająca dopuszczalnemu prądowi wirnika ifmax P – zadana moc czynna generatora.Moc bierna generatora musi respektować ograniczenia wynikające z dopuszczalnego prądu stojana:
22maxmax )( PUIQs (2)
Stąd za dopuszczalną wartość mocy oddawanej przez generator do sieci przesyłowej należy przyjąć mniej-szą spośród dwóch maksymalnych wartości:
maxmaxmax ,min fgs QQQ (3)
Na etapie planowania długoterminowego używa się ograniczeń w postaci stałych wartości mocy (Qmax i Qmin), niezależnie od punktu pracy generatora wynikającego z rozpływu mocy. Jest to hipoteza konserwatywna, impli-kująca dodatkowy ukryty zapas napięciowy chroniący przed lawiną napięć. Baterie kondensatorów, także mechanicz-nie załączane, oraz dławiki powinny być modelowane z uwzględnieniem zależności ich mocy od kwadratu napięcia.
2BUQshunt (4)
gdzie: B – susceptancja poprzeczna kompensatora.
Robert Lis / Politechnika Wrocławska Grzegorz Błajszczak / Polskie Sieci Elektroenergetyczne Operator SA

15
3. ŚRODKI KOMPENSACJI MOCY BIERNEJ
Zapasy mocy biernej w planowaniu są określane na różne sposoby. W większości systemów elektroener-getycznych bezpieczny zapas mocy biernej definiuje się jako odległość bazowego punktu pracy od punktu lawinynapięć. Przez punkt lawiny napięć (PLN) rozumie się w analizie statycznej taki punkt, w którym po niewielkim wzroście mocy odbiorów wystąpi utrata zbieżności procesu iteracyjnego w programie rozpływu mocy (rys. 1).
Rys. 1. Krzywa nosowa PU w warunkach normalnych oraz podczas krytycznego wyłączenia awaryjnego
Kompensacja mocy biernej w sieciach elektroenergetycznych ma na celu poprawę gospodarki mocą bier-ną. Polega na właściwym doborze mocy baterii kondensatorów i ich rozmieszczeniu w sieci. Kryterium optyma-lizacji wynika również z warunków ekonomicznych, tj. minimum sumy kosztów rocznych. Optymalizuje się roz-mieszczenie baterii przyłączanych do szyn NN stacji o mocach 15÷45 Mvar (w miarę potrzeby mogą być większe moce). PSE Operator SA sukcesywnie odbudowuje niezbędny zapas mocy biernej w KSE poprzez instalację baterii kondensatorów w wybranych stacjach 400/110 kV oraz 220/110 kV. Baterie kondensatorów podłączane są do uzwojeń kompensacyjnych autotransformatorów sieciowych w przykładowych stacjach podanych w tab. 1.
Tab. 1. Przykładowe lokalizacje i moce instalowanych baterii
Lokalizacja TR/ATRMoc KS [Mvar]
SE Gdańsk Błonia 400/110/31,5 kV TR1 2x25
SE Grudziądz 400/110/15 kV AT5 4x15
SE Olsztyn Mątki 400/110/15 kV AT2 4x15
SE Jasiniec 220/110/15 kV AT1 3x15
SE Miłosna 220/110/15 kV AT1 3x15
SE Ełk 220/110/15 kV AT2 3x15
SE Mory 220/110/15 kV AT1, AT2 2x15
3.1. Optymalizacja środków kompensacji w sieciach SNProblem optymalizacji kompensacji w sieciach SN dotyczy:• mocy kompensatorów• lokalizacji kompensatorów.
������������������������������������������������������������������
�
������ ������ ������ ������ ������ ������
�����
�����
�����
�����
�����
����
��������
� ����������������������������������������������������������
��� ����������������������������
���������������������
���������������������������
��
Indukcyjne algorytmy optymalizacji środków kompensacji mocy biernej w KSE

16
Moc kompensatorówZależnie od lokalnych warunków instaluje się baterie kondensatorów o niewielkich mocach w liniach SN
(moce do 300 kvar). Baterie średniego lub niskiego napięcia instaluje się u odbiorców – cel: poprawa współczyn-nika mocy (tgφ = 0,4). Moc takiej baterii wyznacza się następująco:
21 �� tgtgPQbat (5)
gdzie: P to pobierana moc czynna, zaś tgφ1 i tgφ2 – wartości tgφ przed i po kompensacji.
W sytuacji kompensacji indywidualnej moc baterii kondensatorów Qk jest ograniczona
09,0 QQk (6)
gdzie: Q0 – moc bierna biegu jałowego silnika indukcyjnego. Taki sposób kompensacji ma uzasadnienie przy silnikach o mocach większych od 30 kW.
Rozmieszczenie kompensatorów Na podstawie literatury przedmiotu [6, 7] można wyróżnić kilka najważniejszych metod służących do pla-
nowania rozmieszczenia elementów sztucznej kompensacji mocy biernej:• metoda wg wytycznych URE• metoda szacunkowa• metoda programowania dynamicznego.
3.1.1. Metoda wg wytycznych URE Moc kompensowaną Qkn po stronie nn można określić ze wzoru
)()(240 2
STrkp
kwknkn RRTK
KKUQQ
(7)
gdzie: Q – zapotrzebowanie na moc bierną U – znamionowe napięcie na nn i SN Kkn, Kkw – jednostkowe koszty transformacji na niskim średnim napięciu Kp – koszt jednostkowy strat mocy Tk – czas użytkowania baterii kondensatorów RTr, Rs – rezystancja transformatora i sieci przeliczone na nn.
Jest to metoda uproszczona, daje dobre rezultaty przy naturalnym współczynniku mocy cosφ ≥ 0,83.
3.1.2. Metoda szacunkowa Sprowadza się do następujących zasad: • współczynnik mocy po stronie nn w szczycie obciążenia nie powinien przekraczać 0,87÷0,90 (nie doty-
czy sytuacji, gdy moc baterii WN byłaby mniejsza niż 600 kvar, wówczas całą moc bierną należy kom-pensować po stronie nn)
• optymalna moc bierna SN zasilana z jednego pola wynosi 900÷1200 kvar.
3.1.3. Metoda programowania dynamicznego Ma zastosowanie do sieci promieniowych. Moce szczytowe w poszczególnych promieniach sieci wyno-
szą:
Si = Pi + jQi, dla i = ilość stacji SN/nn (8)
Robert Lis / Politechnika Wrocławska Grzegorz Błajszczak / Polskie Sieci Elektroenergetyczne Operator SA
17
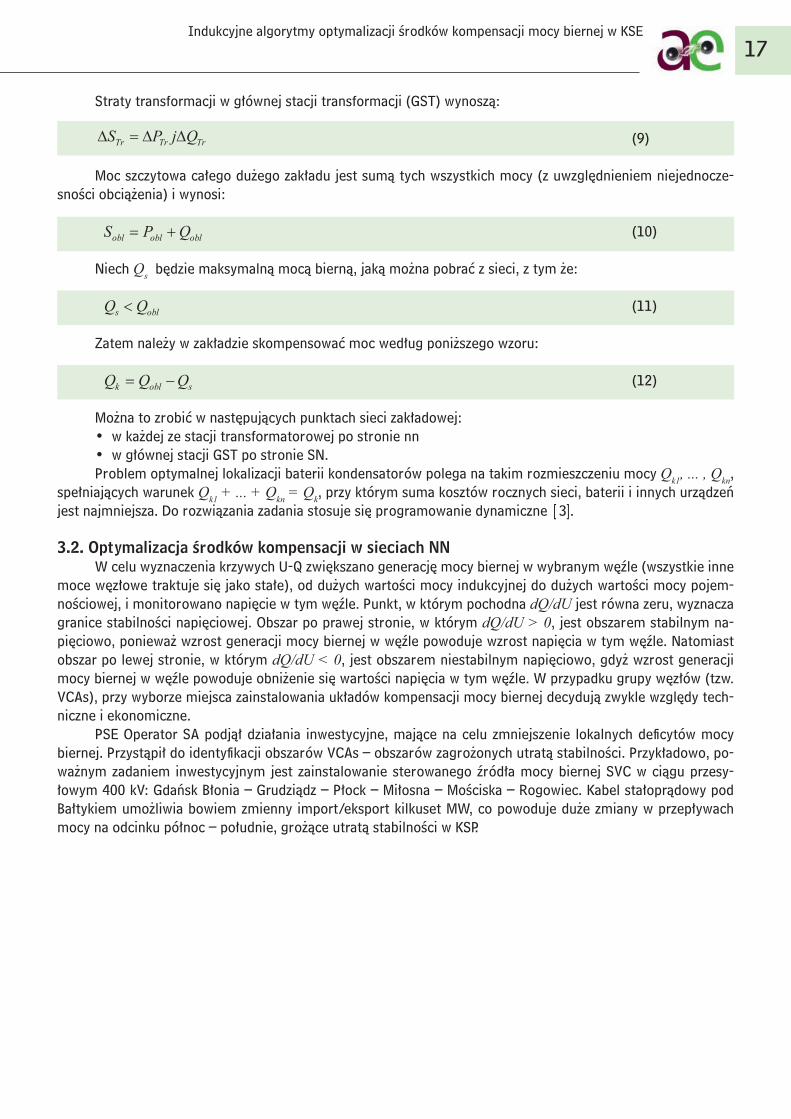
Straty transformacji w głównej stacji transformacji (GST) wynoszą:
TrTrTr QjPS (9)
Moc szczytowa całego dużego zakładu jest sumą tych wszystkich mocy (z uwzględnieniem niejednocze-sności obciążenia) i wynosi:
obloblobl QPS (10)
Niech Qs będzie maksymalną mocą bierną, jaką można pobrać z sieci, z tym że:
obls QQ (11)
Zatem należy w zakładzie skompensować moc według poniższego wzoru:
soblk QQQ (12)
Można to zrobić w następujących punktach sieci zakładowej: • w każdej ze stacji transformatorowej po stronie nn• w głównej stacji GST po stronie SN. Problem optymalnej lokalizacji baterii kondensatorów polega na takim rozmieszczeniu mocy Qk1, ... , Qkn,
spełniających warunek Qk1 + ... + Qkn = Qk, przy którym suma kosztów rocznych sieci, baterii i innych urządzeń jest najmniejsza. Do rozwiązania zadania stosuje się programowanie dynamiczne [3].
3.2. Optymalizacja środków kompensacji w sieciach NNW celu wyznaczenia krzywych U-Q zwiększano generację mocy biernej w wybranym węźle (wszystkie inne
moce węzłowe traktuje się jako stałe), od dużych wartości mocy indukcyjnej do dużych wartości mocy pojem-nościowej, i monitorowano napięcie w tym węźle. Punkt, w którym pochodna dQ/dU jest równa zeru, wyznacza granice stabilności napięciowej. Obszar po prawej stronie, w którym dQ/dU > 0, jest obszarem stabilnym na-pięciowo, ponieważ wzrost generacji mocy biernej w węźle powoduje wzrost napięcia w tym węźle. Natomiast obszar po lewej stronie, w którym dQ/dU < 0, jest obszarem niestabilnym napięciowo, gdyż wzrost generacji mocy biernej w węźle powoduje obniżenie się wartości napięcia w tym węźle. W przypadku grupy węzłów (tzw. VCAs), przy wyborze miejsca zainstalowania układów kompensacji mocy biernej decydują zwykle względy tech-niczne i ekonomiczne.
PSE Operator SA podjął działania inwestycyjne, mające na celu zmniejszenie lokalnych deficytów mocybiernej. Przystąpił do identyfikacji obszarów VCAs – obszarów zagrożonych utratą stabilności. Przykładowo, po-ważnym zadaniem inwestycyjnym jest zainstalowanie sterowanego źródła mocy biernej SVC w ciągu przesy-łowym 400 kV: Gdańsk Błonia – Grudziądz – Płock – Miłosna – Mościska – Rogowiec. Kabel stałoprądowy pod Bałtykiem umożliwia bowiem zmienny import/eksport kilkuset MW, co powoduje duże zmiany w przepływach mocy na odcinku północ – południe, grożące utratą stabilności w KSP.
Indukcyjne algorytmy optymalizacji środków kompensacji mocy biernej w KSE

18
Rys. 2. Etapy identyfikacji obszarów VCAs (ang. Voltage Control Areas)
Identyfikacja obszarów VCAs zawiera następujące etapy (rys. 2): • Wybór węzłów do identyfikacji obszarów VCAs: w wyniku analizy modalnej dla wszystkich zdefiniowa-
nych uprzednio wyłączeń tworzona jest lista węzłów, z której do dalszej analizy wybiera się te z największym współczynnikiem udziału wartości własnej (WDA).
• Grupowanie (ang. clustering) wyłączeń typ N-1 i N-2 na podstawie podobieństwa: program identyfikuje podobne wyniki rozpływu mocy na skutek różnych wyłączeń. Tylko różne grupy wyłączeń będą brane pod uwagę do identyfikacji poszczególnych obszarów VCAs w poniższym etapie 6 i 7.
• Normalizowanie współczynnika udziału WDA dla rozpoznanych węzłów generatorowych (gdzie Qmax, Qmin – maksymalna i minimalna moc bierna wytwarzana w węźle jest określona).
• Wybór węzłów generacyjnych w grupie (klastrze) Ck: dla każdej zidentyfikowanej grupy wyłączeń Ck obliczany jest współczynnik udziału węzła generacyjnego w tej grupie.
• Grupowanie klastrów Ck pod względem podobieństwa współczynników Gens: w tym etapie grupowane są ponownie klastry Ck, w których występują te same węzły generatorowe lub podobne.
• Identyfikacja obszaru VCAs – znajdowanie węzłów odbiorczych: dla każdego obszaru VCAm badana jest częstość występowania każdego węzła.
• Identyfikacja obszaru VCAs – znajdowanie węzłów generacyjnych: dla każdego Genm znajdowana jest częstość występowania węzła generacyjnego. Wybierane są tylko te węzły, które występują częściej od zdefinio-wanego kryterium.
3.2.1. Wykorzystanie algorytmu indukcyjnego – drzew decyzyjnychOdkrywanie wiedzy w bazach danych jest procesem odkrywania nowych korelacji, wzorców i trendów na
podstawie dużych wolumenów danych przechowywanych w repozytoriach, wykorzystując technologie rozpozna-wania wzorców. Proces odkrywania wiedzy składa się z następujących etapów [1]:
• utworzenie zbioru treningowego, w którym poszukuje się zależności, reguł i związków• wybranie algorytmu do eksploracji danych• szukanie wzorców w danych• interpretacja znalezionych wzorców i ich weryfikacja – raport dla użytkowników.Najważniejszy w tym procesie jest etap eksploracji danych (ang. data mining) (rys. 3a) oraz wykorzysta-
nie właściwego algorytmu indukcyjnego [1] do znajdowania zależności i schematów w przygotowanym zbiorze danych.
Robert Lis / Politechnika Wrocławska Grzegorz Błajszczak / Polskie Sieci Elektroenergetyczne Operator SA

19
Rys. 3. Na podstawie tabeli decyzyjnej (a) tworzone jest drzewo decyzyjne (b), którego węzłami są poszczególne atrybuty, gałęziami wartości odpowiadające tym atrybutom, a liście tworzą poszczególne decyzje. Część (b) przedstawia strukturę rekordów bazy danych wykorzystanych do budowy drzewa decyzyjnego danego obszaru VCAs
Drzewa decyzyjne są formami reprezentacji o dkrywanej wiedzy (rys. 3a). Są to graficzne metody wspoma-gania procesu decyzyjnego, stosowania w teorii decyzji. Algorytm drzew decyzyjnych jest stosowany w uczeniu maszynowym do pozyskiwania wiedzy na podstawie przykładów. Jest to schemat o strukturze drzewa decy-zji i ich możliwych konsekwencji. Zadaniem drzew decyzyjnych jest rozpoznanie właściwego obszaru VCAs na podstawie licznych, rozgałęziających się wariantów rozpływu mocy w SEE. Klasyfikacja polega na znajdowaniu sposobu odwzorowania danych w zbiór predefiniowanych klas – wariantowych rozpływów mocy. Na podstawie zawartości bazy danych budowany jest model (drzewo klasyfikacyjne), który służy do szybkiego rozpoznania właściwego obszaru VCAs. W tym przypadku zmienną dyskryminującą jest zmienna jakościowa Pgen. Do wyzna-czenia wartości mocy biernej Qres, wymaganej ze względu na bezpieczeństwo analizowanego obszaru VCA typ C, wykorzystano strukturę drzewa regresyjnego, gdzie zmienną dyskryminującą jest zmienna ilościowa – wybrane parametry rozpływu mocy. Przykład kodu programu (algorytmu indukcyjnego) zapisanego w umownym języku programowania przedstawiono poniżej. Parametr φ oznacza stopień podobieństwa atrybutów.
Compute B=number of elements in base Compute R=number of elements in set-i Compute maximum number of elements M=max(B,R) Compute threshold for common elements T=φM Compute number of common elements between base and set-i C=common elements If C>=T then base and set-i are similar If C<T then: Denote the set (base or set-i) with the lowest number of elements by S. If all elements in this smallest set are included in the largest set then sets are similar; otherwise sets are not similar
Indukcyjne algorytmy optymalizacji środków kompensacji mocy biernej w KSE

20
BIBLIOGRAFIA
4. PODSUMOWANIE
Opisywana została metoda wyznaczania obszarów w systemie elektroenergetycznym (SEE), które są po-datne na utratę stabilności napięciowej podczas pracy SEE w szczególnych (trudnych) warunkach. Obszary te, podatne na niestabilność ze względu na brak rezerwy mocy biernej, są określane jako VCAs (ang. Voltage Control Areas). Metoda oparta jest na analizie krzywych P-U w połączeniu z analizą modalną. Obszary VCAs identyfiko-wane były za pomocą metod grupowania heurystycznego. Dla badanych scenariuszy i zbiorów nieprzewidzianych stanów pracy w systemie PSE Operator zostały zidentyfikowane dwa obszary VCAs. Dla każdego ze zidentyfiko-wanych VCAs określone zostały: grupa generatorów wraz z dodatkowymi źródłami, których wyczerpanie rezerwy mocy biernej skutkuje niestabilnością w VCAs. Podział wymaganej rezerwy mocy biernej wśród generatorów oraz lokalizację i wartość nowych źródeł mocy biernej, które kontrolują analizowany obszar VCA, uzyskano, sto-sując techniki programowania liniowego oraz algorytm drzew decyzyjnych.
1. Lis R., Wiszniewski A., Ocena projektu EPRI „Development of a Method for the Identification of Critical Voltage Areas and Determination of Required Reactive Reserves” pod względem możliwości wdrożenia jego wyników w PSE Operator SA, Raport Instytutu Energoelektryki Politechniki Wrocławskiej, seria SPR nr 09/2008, Wrocław 2008.
2. Zhong J., Nobile E., Bose A., Bhattacharya K., Localized Reactive Power Markets Using the Concept of Voltage Control Areas, IEEE Trans. Power Syst., vol. 19, s. 1555–1561, August 2004.
3. Sobierajski M., Rojewski W., Badanie stabilności napięciowej sieci przesyłowych, Energetyka, 2007, z. temat. nr 10, s. 13–19.
4. Taylor C.W., Power system voltage stability, McGraw-Hill, 1994.5. Bourgin F., Testud G., Heilbronn B., Verseille J., Present practices and trends on the French Power System to prevent
voltage collapse, IEEE Trans. on Power Systems, vol. 8, no. 3, August 1993, s. 778–787.
Robert Lis / Politechnika Wrocławska Grzegorz Błajszczak / Polskie Sieci Elektroenergetyczne Operator SA

21

22
Autorzy / Biografie
Krzysztof Madajewski / Instytut Energetyki Oddział GdańskRobert Rink / Instytut Energetyki Oddział Gdańsk
Robert RinkGdańsk / Polska
Inżynier elektronik, specjalność automatyka, absol-went Wydziału Elektroniki Politechniki Gdańskiej.W Instytucie Energetyki pracuje od roku 1991. Jego dotychczasowa aktywność zawodowa skupia się na dwóch obszarach: regulatory wzbudzenia oraz cyfrowe regulatory napięcia generatorów syn-chronicznych, układy rozruchu częstotliwościowe-go – projektowanie, uruchamianie, modelowanie i symulacja; analizy pracy Krajowego Systemu Elek-troenergetycznego, w tym związane z rozwojem energetyki wiatrowej.Współautor kilkunastu publikacji.
Krzysztof MadajewskiGdańsk / Polska
Inżynier elektryk automatyk. Absolwent Wydziału Elektrycznego Politechniki Gdańskiej. Obronił pracę doktorską z zakresu dynamiki systemów elektro-energetycznych (1983), a następnie przedstawił rozprawę habilitacyjną z zakresu układów przesy-łowych prądu stałego (2004). Od 2010 roku jest profesorem Instytutu Energetyki.W latach 1974–1988 pracował w Instytucie Auto-matyki Systemów Energetycznych Oddział Gdańsk, a od 1988 jest zatrudniony w Instytucie Energetyki Oddział Gdańsk. Od roku 1990 jest dyrektorem tej placówki. Jest specjalistą w dziedzinie sterowania i regulacji systemów elektroenergetycznych. Przez wiele lat brał udział w pracach EURELECTRICw grupie R&D. Obecnie zaangażowany jest w aktywność Komitetu Studiów CIGRE (Komitet C2 – Sterowanie i Prowadzenie Ruchu Systemu) oraz EERA (European Energy Research Alliance) w grupach Smart Grid oraz WIND.Reprezentuje Polskę w EEGI (European Electric Grid Initiative), zajmującej się sprawami sieci, a zwłaszcza Smart Grid na poziomie UE.Kierował wieloma projektami badawczymi i wdro-żeniowymi realizowanymi na zamówienie krajowej elektroenergetyki oraz EPRI i UCTE (obecnie ENTSO-E).Jest autorem lub współautorem ponad czterdzie-stu publikacji naukowych.

23Praca układu wzbudzenia i regulacji napięcia generatora synchronicznego
w stanach niesymetrycznych
Streszczenie
Artykuł dotyczy analizy pracy statycznego tyrysto-rowego układu wzbudzenia i regulacji napięcia generatora synchronicznego dużej mocy w niesymetrycznych stanach pracy. Analizowane niesymetrie są m.in. wynikiem zwarć niesymetrycznych w systemie elektroenergetycznym (SEE). Przedstawione wyniki badań uzyskano z modelu symulacyjnego, odwzorowującego chwilowe przebiegi czasowe w obwodach wzbudzenia i regulacji napięcia oraz w SEE. Model generatora synchronicznego uwzględnia składowe transformacji. Model prostownika wzbudzenia nie opisuje charakterystyki zewnętrznej prostownika z wykorzystaniem napięć średnich, jak to ma miejsce za-zwyczaj, ale jest modelem opisującym napięcia chwilowe na wyjściu trójfazowego sześciopulsowego prostownika.
Prąd wzbudzenia generatora steruje w modelu źródłem prądowym wymuszającym prąd w prostowniku i transfor-matorze wzbudzenia. Model SEE uwzględnia impedancje zastępczej linii dla składowych symetrycznych. Sygnały wejściowe do modelu regulatora napięcia nie są wyprowa-dzane z modelu generatora, ale są wyznaczane z wykorzy-staniem pomiarów z przekładników napięciowych i prądo-wych, a następnie cyfrowo przetwarzane w celu obliczenia użytecznych sygnałów sterujących. Model umożliwia szczegółowe analizowanie niesymetrycznych i zakłóconych stanów pracy generatora z układem wzbudzenia i regulacji napięcia. Jest on również niezbędny do analizy nowych rozwiązań w cyfrowych układach regulacji napięcia.
PRACA UKŁADU WZBUDZENIA I REGULACJI NAPIĘCIA GENERATORA SYNCHRONICZNEGO W STANACH NIESYMETRYCZNYCH
dr hab. inż. Krzysztof Madajewski, profesor Instytutu Energetyki / Instytut Energetyki Oddział Gdańskmgr inż. Robert Rink / Instytut Energetyki Oddział Gdańsk
1. WPROWADZENIE
Tradycyjnie w modelach statycznych tyrystorowych układów wzbudzenia i regulacji, na potrzeby analiz systemowych napięcie wzbudzenia opisywane jest równaniem charakterystyki zewnętrznej prostownika wzbu-dzenia, z wykorzystaniem wartości średnich. Regulator napięcia dobierany jest z modeli standardowych IEEE lub opracowany indywidualnie, stosownie do celu badań. Sygnały wejściowe do regulatora napięcia, takie jak prądy, napięcia i moce są wyprowadzane wprost z modelu generatora i nie uwzględniają problemów z pomiarem, cyfro-wym przetwarzaniem i niedoskonałościami przyjętych algorytmów wyznaczania użytecznych sygnałów prądów, napięć i mocy. Model generatora synchronicznego jest standardowo modelem Parka, z uwzględnieniem składo-wych rotacji, ale bez składowych transformacji. W konsekwencji w prądzie wzbudzenia w trakcie zaburzeń wystę-pują jedynie składowe aperiodyczne, a nie pojawiają się składowe oscylacyjne. Modele elementów infrastruktury sieciowej są opisywane z wykorzystaniem wartości dla składowych zgodnych. Takie modele układu wzbudzenia i regulacji napięcia oraz SEE są sprawdzone, powszechnie stosowane i potwierdziły swoją przydatność do ba-dania stanów symetrycznych, w tym zwarć symetrycznych. Obliczenia są wykonywane szybko nawet dla dużych SEE. Modele takie nie są jednak użyteczne do badania stanów, w których dochodzi do różnych zaburzeń niesy-metrycznych. Zbudowanie modelu, który umożliwia analizę stanów niesymetrycznych, jest związane z wieloma trudnościami i znacznym zwiększeniem czasu obliczeń.
Środowisko do badań symulacyjnychDo badań symulacyjnych wykorzystano środowisko MATLAB-SIMULINK. Opracowany model należy do
klasy tak zwanych układów sztywnych. Z jednej strony stałe czasowe generatora synchronicznego sięgają poje-dynczych sekund, z drugiej strony procesy związane z modelowaniem prostownika wzbudzenia wymagają kroku całkowania liczonego w dziesiątkach mikrosekund. W wielu miejscach modelu konieczne jest cykliczne wyzna-czanie dokładnych czasów przejść przez zero napięć lub próbkowanie sygnałów z określoną częstotliwością. Komplikację stanowi również konieczność uzyskania stanu ustalonego przed wprowadzaniem zaburzeń do mo-delu i wielokrotnego obliczenia z tego samego stanu początkowego. Wszystkie te problemy rozwiązano, a średni czas obliczeń jednej sekundy procesu symulacji wymagał około dwóch minut czasu rzeczywistego.
24
2. OPIS MODELU DLA STANÓW NIESYMETRYCZNYCH
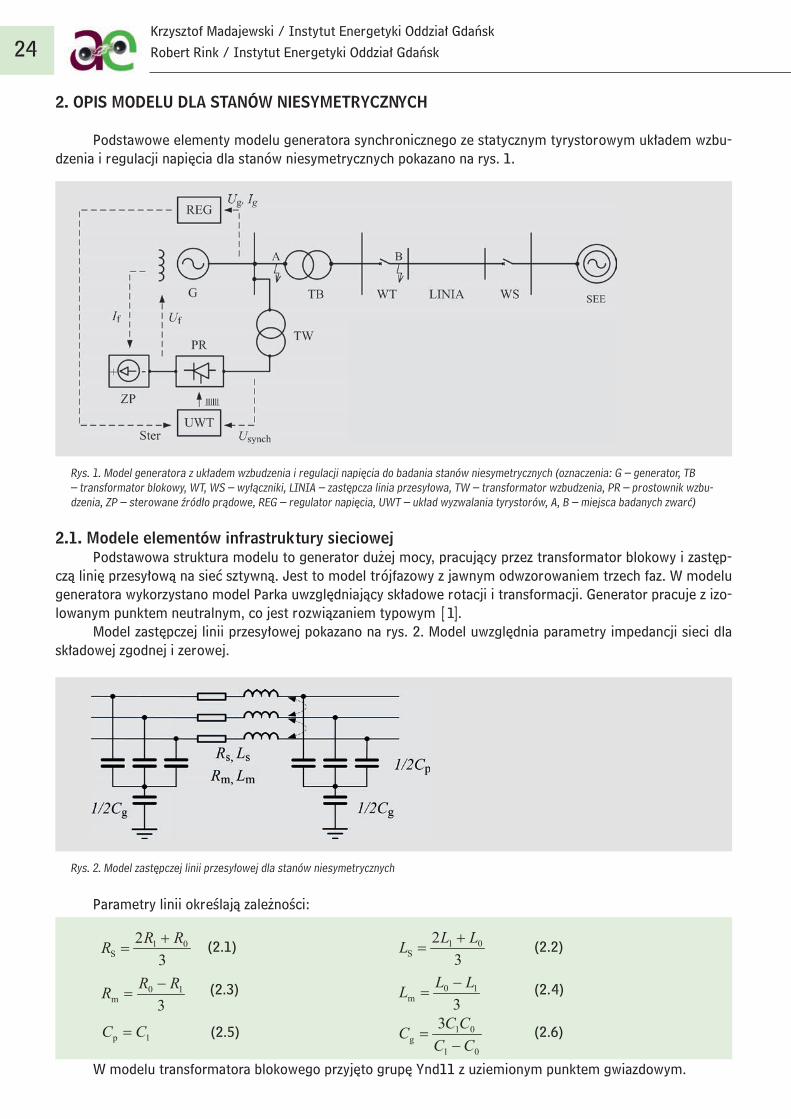
Podstawowe elementy modelu generatora synchronicznego ze statycznym tyrystorowym układem wzbu-dzenia i regulacji napięcia dla stanów niesymetrycznych pokazano na rys. 1.
Rys. 1. Model generatora z układem wzbudzenia i regulacji napięcia do badania stanów niesymetrycznych (oznaczenia: G – generator, TB – transformator blokowy, WT, WS – wyłączniki, LINIA – zastępcza linia przesyłowa, TW – transformator wzbudzenia, PR – prostownik wzbu-dzenia, ZP – sterowane źródło prądowe, REG – regulator napięcia, UWT – układ wyzwalania tyrystorów, A, B – miejsca badanych zwarć)
2.1. Modele elementów infrastruktury sieciowejPodstawowa struktura modelu to generator dużej mocy, pracujący przez transformator blokowy i zastęp-
czą linię przesyłową na sieć sztywną. Jest to model trójfazowy z jawnym odwzorowaniem trzech faz. W modelu generatora wykorzystano model Parka uwzględniający składowe rotacji i transformacji. Generator pracuje z izo-lowanym punktem neutralnym, co jest rozwiązaniem typowym [1].
Model zastępczej linii przesyłowej pokazano na rys. 2. Model uwzględnia parametry impedancji sieci dla składowej zgodnej i zerowej.
Rys. 2. Model zastępczej linii przesyłowej dla stanów niesymetrycznych
Parametry linii określają zależności:
32 01
SRRR
(2.1)
32 01
SLLL
(2.2)
310
mRRR
(2.3)
310
mLLL
(2. 4)
1p CC (2.5)
01
01g
3CCCCC
(2.6)
W modelu transformatora blokowego przyjęto grupę Ynd11 z uziemionym punktem gwiazdowym.
Krzysztof Madajewski / Instytut Energetyki Oddział GdańskRobert Rink / Instytut Energetyki Oddział Gdańsk
25
2.2. Model układu wzbudzeniaW badanym modelu zarówno prostownik (PR), jak i układ wyzwalania (UWT) zostały zamodelowane
w sposób odwzorowujący z dużą dokładnością faktycznie zachodzące zjawiska. Prostownik jest modelem prze-kształtnika sześciopulsowego, sterowanego impulsami poprzez układ wyzwalania. Napięcie wyjściowe prostow-nika po dostosowaniu jednostek jest wprowadzane na wejście odpowiadające napięciu wzbudzenia w modelu generatora. Przekształtnik jest obciążony źródłem prądowym, którego prąd wyjściowy odpowiada prądowi wzbu-dzenia generatora. Źródło prądowe jest sterowane prądem wzbudzenia, otrzymywanym z modelu generatora synchronicznego. Przekształtnik jest zasilany z transformatora wzbudzania o grupie połączeń Yd. Impedancja transformatora odpowiada za procesy komutacyjne przekształtnika. Do synchronizacji impulsów wyzwalających tyrystory w podstawowym wariancie modelu wykorzystywane jest napięcie zasilające prostownik. Przebadano również wariant, w którym impulsy synchronizowano sygnałem z przekładników napięciowych generatora.
2.3. Model regulatora napięciaModel układu regulacji obejmował główną pętlę regulacji napięcia na zaciskach generatora, stabilizator
systemowy z sygnałem od mocy czynnej oraz człon kompensacji prądowej. Nie modelowano ograniczników re-gulacji.
Człony pomiarowe na zaciskach stojana generatora korzystały z sygnałów napięć fazowych i prądów z przekształtników. Sygnały te próbkowano z czasem próbkowania jednej milisekundy i realizowano obliczenia wyznaczające sygnały: napięcia, mocy czynnej, mocy biernej oraz częstotliwości.
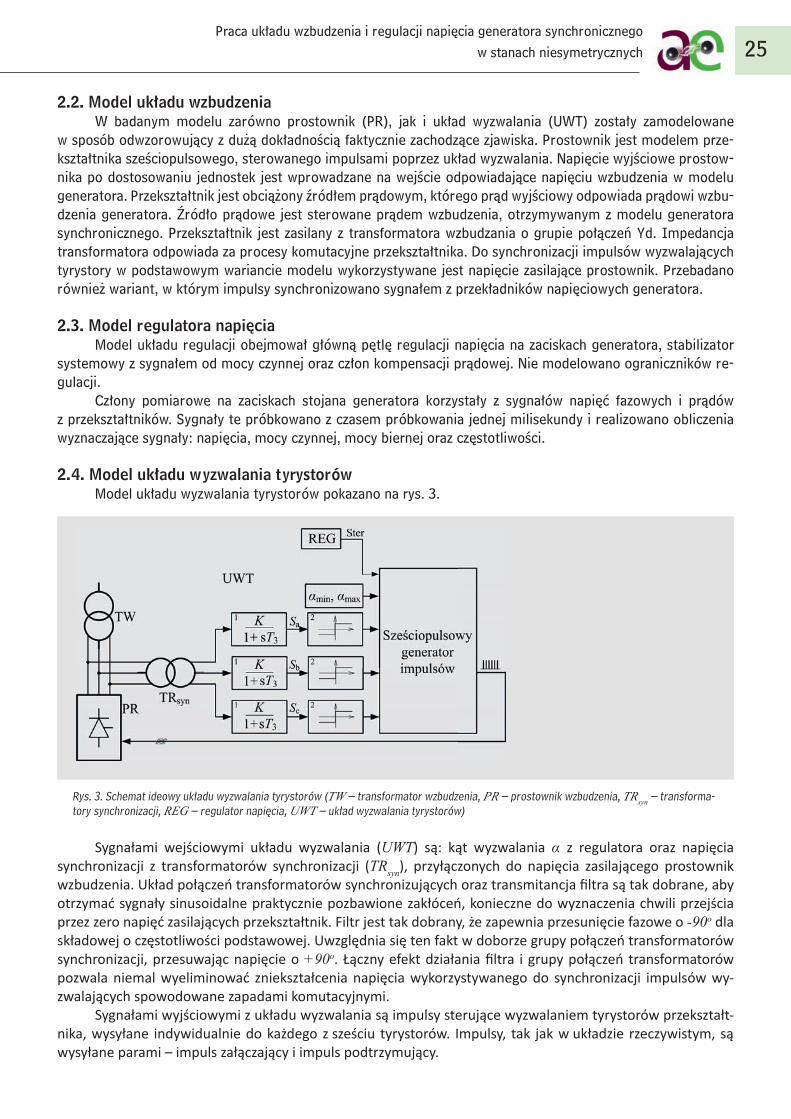
2. 4. Model układu wyzwalania tyrystorówModel układu wyzwalania tyrystorów pokazano na rys. 3.
Rys. 3. Schemat ideowy układu wyzwalania tyrystorów (TW – transformator wzbudzenia, PR – prostownik wzbudzenia, TRsyn – transforma-tory synchronizacji, REG – regulator napięcia, UWT – układ wyzwalania tyrystorów)
Sygnałami wejściowymi układu wyzwalania (UWT) są: kąt wyzwalania α z regulatora oraz napięcia synchronizacji z transformatorów synchronizacji (TRsyn), przyłączonych do napięcia zasilającego prostownik wzbudzenia. Układ połączeń transformatorów synchronizujących oraz transmitancja filtra są tak dobrane, aby otrzymać sygnały sinusoidalne praktycznie pozbawione zakłóceń, konieczne do wyznaczenia chwili przejścia przez zero napięć zasilających przekształtnik. Filtr jest tak dobrany, że zapewnia przesunięcie fazowe o -90o dla składowej o częstotliwości podstawowej. Uwzględnia się ten fakt w doborze grupy połączeń transformatorów synchronizacji, przesuwając napięcie o +90o. Łączny efekt działania filtra i grupy połączeń transformatorów pozwala niemal wyeliminować zniekształcenia napięcia wykorzystywanego do synchronizacji impulsów wy-zwalających spowodowane zapadami komutacyjnymi.
Sygnałami wyjściowymi z układu wyzwalania są impulsy sterujące wyzwalaniem tyrystorów przekształt-nika, wysyłane indywidualnie do każdego z sześciu tyrystorów. Impulsy, tak jak w układzie rzeczywistym, są wysyłane parami – impuls załączający i impuls podtrzymujący.
Praca układu wzbudzenia i regulacji napięcia generatora synchronicznego w stanach niesymetrycznych

26
2.5. Weryfikacja modeluPoprawność zbudowanego modelu została zweryfikowana poprzez porównanie wyników symulacji z mo-
delem zbudowanym w jednym z profesjonalnych programów do badań dynamiki systemu (DSATools). Wprowa-dzano analogiczne zaburzenia symetryczne w obu modelach i porównano przebiegi czasowe. Na rys. 4 pokazano przebiegi dla zwarcia trójfazowego w punkcie B (rys. 1), a na rys. 5 dla skokowej zmiany wartości zadanej na-pięcia. Przebiegi dla obu modeli wykazują dobrą zgodność. Modele układów regulacji napięcia stosowane przez Instytut Energetyki Oddział Gdańsk w badaniach dynamiki systemu weryfikowano wielokrotnie, porównując z rzeczywistymi przebiegami w SEE [2, 3].
Rys. 4. Przebiegi składowych napięcia i mocy generatora (Ug, Pg, Qg), napięcia i prądu wzbudzenia (Uf, If) oraz odchylenia prędkości obroto-wej generatora (Δω) dla modelu badanego oraz dla modelu standardowego w programie symulacyjnym DSATools podczas zwarcia trójfazo-wego w punkcie B
� ��� � ��� � ��� � ��� � ��� ����
�
U�
�
�
� ��� � ��� � ��� � ��� � ��� �
�
�
P�
� ��� � ��� � ��� � ��� � ��� �
�
�
Q�
� ��� � ��� � ��� � ��� � ��� ����I �
� ��� � ��� � ��� � ��� � ��� �
�
�
�
U�
� ��� � ��� � ��� � ��� � ��� ������
�
����
t����
������������
∆ω
Rys. 5. Przebiegi składowych napięcia i mocy generatora (Ug, Pg, Qg), napięcia wzbudzenia (Uf) dla modelu badanego oraz dla modelu stan-dardowego w programie symulacyjnym DSATools po skokowej zmianie napięcia zadanego o 5%
� ��� � ��� � �������
����
����
�
U�
� ��� � ��� � ������
����
����
����
P�
� ��� � ��� � ���
����
���
����
���
Q�
� ��� � ��� � ���
�
�
�
t����
U�
������������
Krzysztof Madajewski / Instytut Energetyki Oddział GdańskRobert Rink / Instytut Energetyki Oddział Gdańsk
27
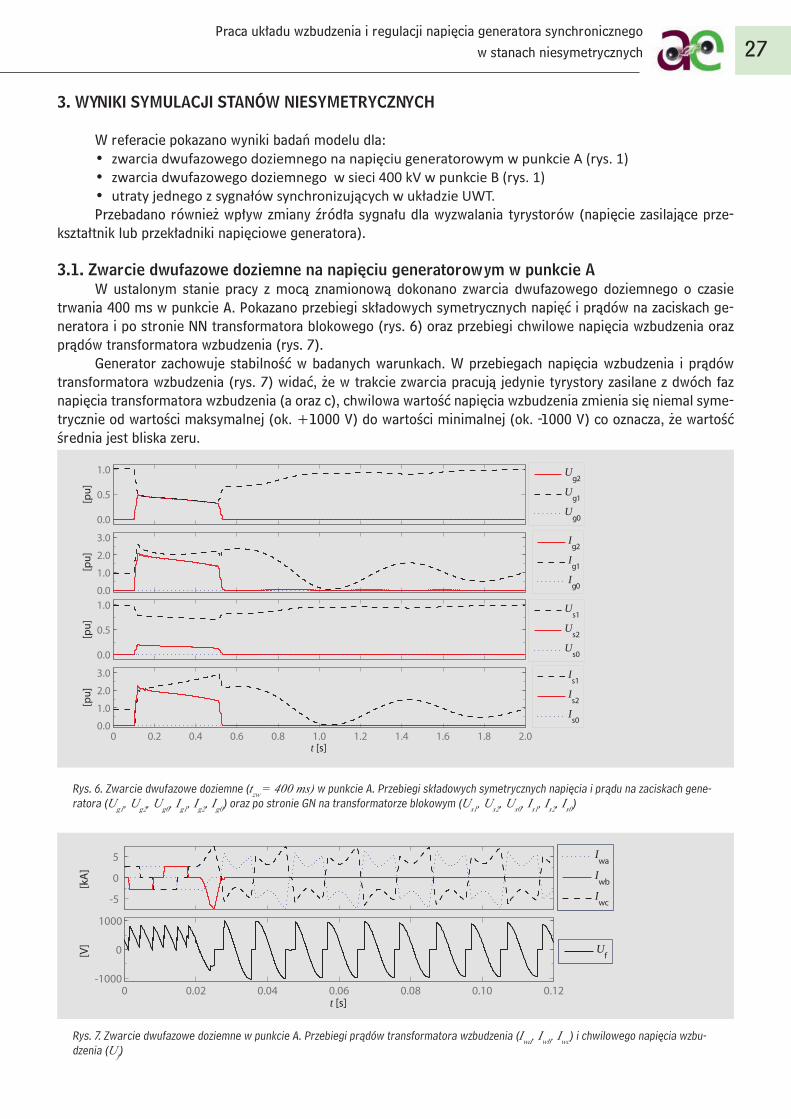
3. WYNIKI SYMULACJI STANÓW NIESYMETRYCZNYCH
W referacie pokazano wyniki badań modelu dla:• zwarcia dwufazowego doziemnego na napięciu generatorowym w punkcie A (rys. 1)• zwarcia dwufazowego doziemnego w sieci 400 kV w punkcie B (rys. 1)• utraty jednego z sygnałów synchronizujących w układzie UWT.Przebadano również wpływ zmiany źródła sygnału dla wyzwalania tyrystorów (napięcie zasilające prze-
kształtnik lub przekładniki napięciowe generatora).
3.1. Zwarcie dwufazowe doziemne na napięciu generatorowym w punkcie A W ustalonym stanie pracy z mocą znamionową dokonano zwarcia dwufazowego doziemnego o czasie
trwania 400 ms w punkcie A. Pokazano przebiegi składowych symetrycznych napięć i prądów na zaciskach ge-neratora i po stronie NN transformatora blokowego (rys. 6) oraz przebiegi chwilowe napięcia wzbudzenia oraz prądów transformatora wzbudzenia (rys. 7).
Generator zachowuje stabilność w badanych warunkach. W przebiegach napięcia wzbudzenia i prądów transformatora wzbudzenia (rys. 7) widać, że w trakcie zwarcia pracują jedynie tyrystory zasilane z dwóch faz napięcia transformatora wzbudzenia (a oraz c), chwilowa wartość napięcia wzbudzenia zmienia się niemal syme-trycznie od wartości maksymalnej (ok. +1000 V) do wartości minimalnej (ok. -1000 V) co oznacza, że wartość średnia jest bliska zeru.
Rys. 6. Zwarcie dwufazowe doziemne (tzw = 400 ms) w punkcie A. Przebiegi składowych symetrycznych napięcia i prądu na zaciskach gene-ratora (Ug1, Ug2, Ug0, Ig1, Ig2, Ig0) oraz po stronie GN na transformatorze blokowym (Us1, Us2, Us0, Is1, Is2, Is0)
Rys. 7. Zwarcie dwufazowe doziemne w punkcie A. Przebiegi prądów transformatora wzbudzenia (Iwa, Iwb, Iwc) i chwilowego napięcia wzbu-dzenia (Uf)
���
���
���
����
�
�U��
U��
U��
���
���
���
���
����
�
�I��
I��
I��
���
���
���
����
�
�U��
U��
U��
� ��� ��� ��� ��� ��� ��� ��� ��� ��� ������
���
���
���
����
t����
�
�I��
I��
I��
�
�
�
�
��������
��������
��������
����
�
�I��
I��
I��
� ���� ���� ���� ���� ���� ���������
�
����
���
t����
�
�
U�
Praca układu wzbudzenia i regulacji napięcia generatora synchronicznego w stanach niesymetrycznych

28
3.2. Zwarcie dwufazowe doziemne w sieci 400 kV w punkcie B W ustalonym stanie pracy z mocą znamionową dokonano zwarcia dwufazowego doziemnego o czasie
trwania 400 ms w punkcie B. Na rys. 8 pokazano przebiegi składowych symetrycznych napięć i prądów na zaci-skach generatora i po stronie NN transformatora blokowego. Na rys. 9 i 10 przedstawiono przebiegi chwilowe napięcia wzbudzenia oraz prądów transformatora wzbudzenia (na rys. 9 – dla synchronizacji układu wyzwalania z napięć zasilających przekształtnik, a na rys. 10 – dla synchronizacji z przekładników napięciowych generatora).
Jak wynika z rys. 8, w badanych warunkach dochodzi do utraty stabilności generatora. Granicznym czasem trwania zwarcia, po którym układ powraca do stabilnej pracy, jest ok. 370 ms.
Rys. 8. Zwarcie dwufazowe doziemne (tzw = 400 ms) w punkcie B. Przebiegi składowych symetrycznych napięcia i prądu na zaciskach genera-tora (Ug1, Ug2, Ug0, Ig1, Ig2, Ig0) oraz po stronie GN na transformatorze blokowym (Us1, Us2, Us0, Is1, Is2, Is0)
���
���
���
����
�
����
���
���
���
���
���
���
����
�
����
���
���
���
���
���
����
�
����
���
���
� ��� ��� ��� ��� ��� ��� ��� ��� ��� ������
���
���
���
����
�����
�
����
���
���
Rys. 9. Zwarcie dwufazowe doziemne w punkcie B. Przebiegi prądów transformatora wzbudzenia (Iwa, Iwb, Iwc) i chwilowego napięcia wzbu-dzenia (Uf). Układ wyzwalania synchronizowany z napięć zasilających przekształtnik
�
�
�
�
��������
��������
��������
����
�
����
���
���
� ���� ���� ���� ���� ���� ���������
�
����
���
�����
�
�
��
Krzysztof Madajewski / Instytut Energetyki Oddział GdańskRobert Rink / Instytut Energetyki Oddział Gdańsk
29
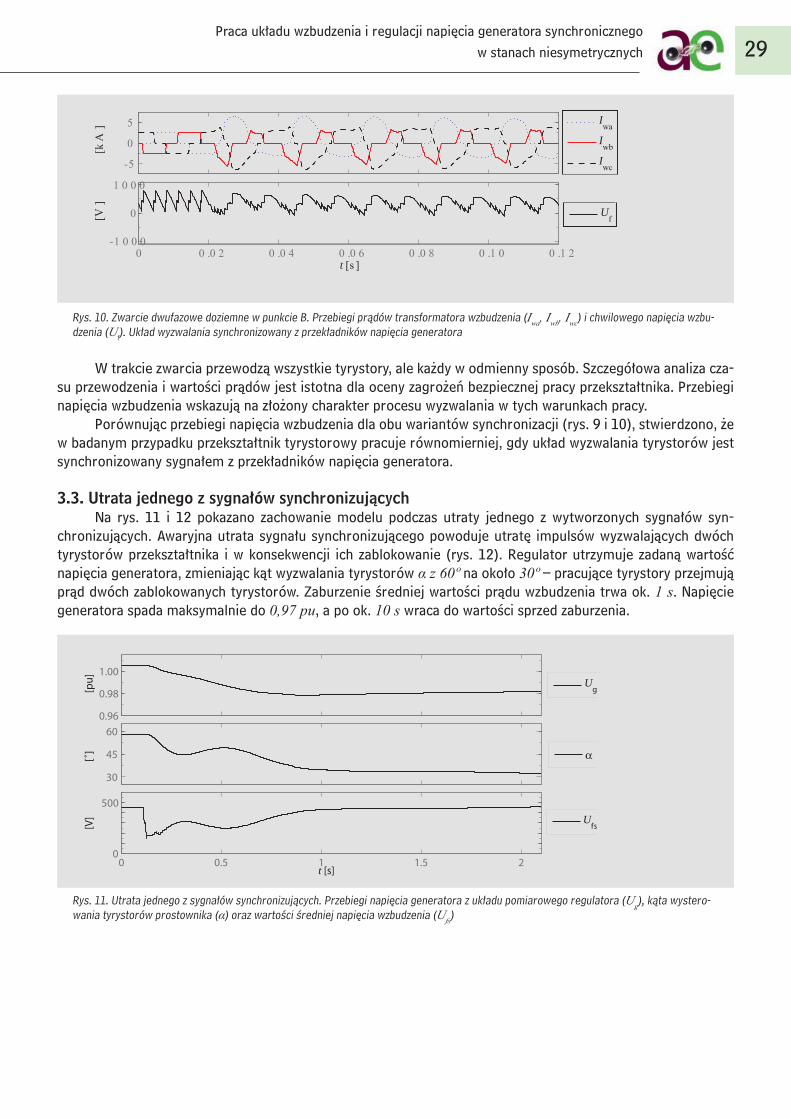
Rys. 10. Zwarcie dwufazowe doziemne w punkcie B. Przebiegi prądów transformatora wzbudzenia (Iwa, Iwb, Iwc) i chwilowego napięcia wzbu-dzenia (Uf). Układ wyzwalania synchronizowany z przekładników napięcia generatora
W trakcie zwarcia przewodzą wszystkie tyrystory, ale każdy w odmienny sposób. Szczegółowa analiza cza-su przewodzenia i wartości prądów jest istotna dla oceny zagrożeń bezpiecznej pracy przekształtnika. Przebiegi napięcia wzbudzenia wskazują na złożony charakter procesu wyzwalania w tych warunkach pracy.
Porównując przebiegi napięcia wzbudzenia dla obu wariantów synchronizacji (rys. 9 i 10), stwierdzono, że w badanym przypadku przekształtnik tyrystorowy pracuje równomierniej, gdy układ wyzwalania tyrystorów jest synchronizowany sygnałem z przekładników napięcia generatora.
3.3. Utrata jednego z sygnałów synchronizujących Na rys. 11 i 12 pokazano zachowanie modelu podczas utraty jednego z wytworzonych sygnałów syn-
chronizujących. Awaryjna utrata sygnału synchronizującego powoduje utratę impulsów wyzwalających dwóch tyrystorów przekształtnika i w konsekwencji ich zablokowanie (rys. 12). Regulator utrzymuje zadaną wartość napięcia generatora, zmieniając kąt wyzwalania tyrystorów α z 60º na około 30º – pracujące tyrystory przejmują prąd dwóch zablokowanych tyrystorów. Zaburzenie średniej wartości prądu wzbudzenia trwa ok. 1 s. Napięcie generatora spada maksymalnie do 0,97 pu, a po ok. 10 s wraca do wartości sprzed zaburzenia.
-5
0
5
[kA
]
Iwa
Iwb
Iwc
0 0 .0 2 0 .0 4 0 .0 6 0 .0 8 0 .1 0 0 .1 2-1 0 0 0
0
1 0 0 0
[V]
t [s ]
Uf
Rys. 11. Utrata jednego z sygnałów synchronizujących. Przebiegi napięcia generatora z układu pomiarowego regulatora (Ug), kąta wystero-wania tyrystorów prostownika (α) oraz wartości średniej napięcia wzbudzenia (Ufs)
�
�
����
����
����
����
�
�
U�
�����
�����
�����
���
�
�
�
� ��� � ��� ���
����
���
t����
�
�
U��
Praca układu wzbudzenia i regulacji napięcia generatora synchronicznego w stanach niesymetrycznych

30
BIBLIOGRAFIA
Rys. 12. Utrata jednego z sygnałów synchronizujących. Przebiegi prądów transformatora wzbudzenia (Iwa, Iwb, Iwc) i chwilowego napięcia wzbudzenia (Uf)
4. PODSUMOWANIE
Opracowany model generatora z układem wzbudzenia i regulacji napięcia umożliwia prowadzenie badań i analiz dowolnych stanów niesymetrycznych generatora i układu wzbudzenia. Jest to nowe rozwiązanie, niesto-sowane wcześniej w badaniach układów wzbudzenia. Zastosowano dyskretny model układu regulacji z realnym czasem próbkowania oraz pełnym odwzorowaniem układów pomiarowych. Opracowany model układu wyzwa-lania tyrystorów pozwala na odwzorowanie rzeczywistych przebiegów w układach wzbudzenia. Model znajdzie zastosowanie w pracach rozwojowych układów wzbudzenia i regulacji napięcia, w analizach złożonych stanów niesymetrycznych systemu oraz w szkoleniach.
1. Kacejko P., Machowski J., Zwarcia w systemach elektroenergetycznych, WNT, Warszawa 2002.2. Madajewski K., Sobczak B., Trębski R., Praca ograniczników w układach regulacji generatorów synchronicznych w wa-
runkach niskich napięć w systemie elektroenergetycznym, Archiwum Energetyki, numer specjalny, XIII Międzynarodowa Konferencja Naukowa – Aktualne problemy w elektroenergetyce, APE 2007, Gdańsk 2007.
3. Madajewski K., Sobczak B., Dynamiczne aspekty utraty stabilności napięciowej, Archiwum Energetyki, tom XXXIX (2009), nr 1, 29–46 – Aktualne problemy w elektroenergetyce, APE 2009, Gdańsk 2009.
��������
��������
��������
����
�
�I��
I��
I��
� ���� ���� ���� ���� ���������
�
����
���
t�����
�
U�
Krzysztof Madajewski / Instytut Energetyki Oddział GdańskRobert Rink / Instytut Energetyki Oddział Gdańsk

31

32Kazimierz Oziemblewski / Oddział Zagłębia Węglowego Stowarzyszenia Elektryków PolskichKsawery Opala / Instytut Energetyki Instytut Badawczy Oddział Gdańsk
Autorzy / Biografie
Ksawery OpalaGdańsk / Polska
Ukończył studia magisterskie na Wydziale Elek-trotechniki i Automatyki Politechniki Gdańskiej (2001). Obecnie zatrudniony jest w Instytucie Energetyki O/Gdańsk na stanowisku asystenta. Obszar zainteresowań naukowych to: automatyka regulacyjna ARNE i ARST, obszarowa regulacja napięcia i mocy biernej, analiza stanu pracy sieci EE i obliczenia rozpływowe.
Kazimierz OziemblewskiKatowice / Polska
Ukończył studia na Wydziale Elektrycznym Poli-techniki Wrocławskiej (1961). Tytuł doktora uzyskał na Wydziale Elektrycznym Politechniki Gliwickiej (1975). W latach 1961–2003 pracował w Okręgo-wej Dyspozycji Mocy w Katowicach. W latach 1977–1982 oddelegowany został do pracy w Centralnym Zarządzie Dyspozycji Krajów Rady Wzajemnej Pomocy Gospodarczej w Pradze (Cze-chy). Członek Stowarzyszenia Elektryków Polskich. Ma na swoim koncie opracowania i publikacje, głównie z zakresu optymalizacji układów pracy sie-ci, kompensacji mocy biernej i stabilności systemu elektroenergetycznego.

33Możliwości oceny bieżącego stanu stabilności SEE.
Pochodne zamiast charakterystyk
MOŻLIWOŚCI OCENY BIEŻĄCEGO STANU STABILNOŚCI SEE. POCHODNE ZAMIAST CHARAKTERYSTYK
dr inż. Kazimierz Oziemblewski / Oddział Zagłębia Węglowego Stowarzyszenia Elektryków Polskichmgr inż. Ksawery Opala / Instytut Energetyki Instytut Badawczy Oddział Gdańsk
1. WSTĘP
W normalnych stanach pracy systemu elektroenergetycznego poszukuje się odpowiedzi na pytanie, jak pa-rametry pracy systemu: moce węzłowe, napięcia węzłowe, przekładnie transformatorów, wpływają na wielkość strat przesyłowych, aby znaleźć sposób na optymalizowanie pracy systemu. W stanach zagrożenia poszukuje się odpowiedzi na pytanie, jak te same parametry wpływają na warunki bezpiecznej pracy systemu, a głównie na jego stabilność, aby znaleźć sposób na zapobieganie awariom.
W rozwiązywaniu zadań z zakresu optymalizacji rozpływów mocy korzysta się z krzywych (charakterystyk) strat mocy czynnej (rzadko biernej), wyznaczonych w funkcji mocy węzłowych oraz przekładni transformatorów. Dokładniej nie same krzywe strat są tu istotne, a ich przyrosty względne (pochodne), policzone względem zmien-nych niezależnych w układzie. Wynika to ze znanych, ogólnych rozwiązań tego problemu [2, 11].
W rozwiązywaniu zadań z zakresu stabilności pracy systemu klasycznym podejściem jest badanie od-powiedzi systemu na małe (stabilność lokalna) lub duże (stabilność globalna) wymuszenia typu: wyłączenia z ruchu elementów przesyłowych sieci, wyłączenia urządzeń wytwórczych, zwarcia w sieci [3, 9, 10]. Badania takie są dość trudne, kosztowne i realizowane sporadycznie w uzasadnionych okolicznościach. Jakimś sygnałem, ale tylko sygnałem, o zagrożeniu utratą stabilności w systemie jest niezbieżność procesu iteracyjnego w pro-gramie obliczania rozpływu mocy.
Obok metod klasycznych istnieją uproszczone metody badania stabilności napięciowej, rzadziej kątowej [3, 4, 5, 9, 10, 22]. W metodach tych badaniu poddaje się przebiegi charakterystyk przesyłanej i odbieranej mocy czynnej lub mocy biernej w funkcji modułu (rzadziej kąta) wektora napięcia w węźle sieci albo odwrotnie, bada się zależność napięcia od mocy pobieranych w węźle (węzłach) sieci. Z uwagi na to, że zachodzące w systemie zależności pomiędzy parametrami pracy (mocami, napięciami itp.) to uwikłane zależności nieliniowe, dotąd nie udało się tych charakterystyk zapisać w jawnej, analitycznej postaci. Zatem do celów analizy wykreśla się ich przebiegi, wyliczając, krok po kroku, parametry kolejnych punktów, korzystając z programu obliczania rozpływu mocy. Opisy sporządzania charakterystyk V-Q, P-V i δ-P oraz korzystania z nich są przedmiotem wielu publikacji i tu nie zostaną przytoczone.
Oceny warunków (tu stabilności) pracy systemu na podstawie wykresów charakterystyk, wykonanych dla wybranych węzłów sieci, choć czasochłonne, mogą być realizowane w procesie planowania ruchu systemu [5]. Oceny tego typu niosą informacje o właściwościach zaplanowanego układu pracy sieci, zwłaszcza na przeba-danych kierunkach przesyłu mocy. Jednak nie zawsze zaplanowany układ bywa realizowany w ruchu. Losowe wyłączenia urządzeń systemu mogą istotnie zmienić warunki, w których dokonano oceny stabilności systemu w procesie planowania. Operator w czasie rzeczywistym nie jest w stanie powtórzyć obliczeń i wtedy pozostaje bez jakichkolwiek danych o stanie (zapasie) stabilności systemu.
W tej publikacji rozważamy propozycje wykonywania analiz stanu stabilności systemu nie na podstawie samych charakterystyk przesyłanych mocy, lecz w oparciu o ich pochodne (albo przyrosty względne). Pochodne niosą poprawne informacje o przebiegu badanych krzywych, zwłaszcza jeśli te krzywe spełniają określone warun-
Streszczenie
Rozwiązywanie zadań optymalizacji rozpływów mocy opiera się na badaniu przebiegu krzywych strat sieciowych w funkcji parametrów pracy systemu. Roz-wiązywanie określonej grupy zadań z zakresu stabilności systemu opiera się na badaniu krzywych (charakterystyk) przesyłu mocy czynnej i biernej w funkcji tych samych pa-
rametrów pracy systemu. Moce węzłów i straty sieciowe to te same kategorie fizyczne; łącznie tworzą bilans mocy systemu. W artykule staramy się wykazać, że metody i narzędzia do badania przebiegu krzywych strat i charak-terystyk przesyłu mocy mogą być zbliżone.
34
ki regularności. Obliczenia takich pochodnych obejmują wszystkie węzły sieci i mogą być realizowane zarówno w trybie off line, przy założonych danych systemu, jak i w czasie rzeczywistym na podstawie aktualnej topologii sieci i bieżących danych pomiarowych [13, 14, 17, 25].
2. PROBLEM STABILNOŚCI SYSTEMU
Zdaniem autorów w badaniu stabilności systemu należy uwzględnić przynajmniej trzy grupy charaktery-stycznych zjawisk obserwowanych w systemie.
Pierwsza grupa odnosi się do zachowania odbiorów. Nie wnikając w szczegóły, można stwierdzić, że odbio-ry, których pobór mocy (czynnych i biernych) znacząco maleje wraz z obniżeniem się napięcia sieci zasilającej, nie wpływają (albo mało wpływają) na rozwój awarii systemowej powiązanej z utratą stabilności. Stały pobór mocy, niezależny od poziomu napięcia (a tak jest np. do czasu wyczerpania się zakresu regulacji napięcia na transformatorach odbiorczych), a tym bardziej wzrost poboru mocy przy zaniżonym napięciu sieci sprzyja roz-wojowi awarii systemowej. Dla przykładu, wzrost poboru prądu (mocy biernej), głównie przez silniki indukcyjne przy obniżającym się napięciu zasilania, może prowadzić do lawiny napięć [3, 5, 9, 10, 21]. Przy tym jest możli-we zakłócenie stabilnej pracy systemu. Obroną przed lawiną napięcia jest utrzymywanie odpowiednio wysokie-go poziomu napięcia, nawet kosztem ograniczenia dostaw energii. Szerzej na temat charakterystyk odbiorów w literaturze [21].
Druga grupa odnosi się do zachowania źródeł mocy, głównie generatorów, w systemie [3, 5, 9, 10, 23]. Ważne są tu wzajemne oddziaływania generatorów na sieć i sieci na generatory. W tym artykule nie analizujemy tych zagadnień. Podzielamy przekonanie, że na skutek losowych (choć niekoniecznie losowych) zdarzeń w sys-temie powiązania generatorów (elektrowni) mogą ulegać osłabieniu w stosunku do stanu normalnego, przez co sieć staje się mniej sztywna i reaguje znacznymi zmianami parametrów pracy na małe (normalne) zakłócenia, powodowane np. działaniem regulatorów mocy czy regulatorów napięcia na generatorach. W normalnych sta-nach pracy systemu w miarę stałe parametry sieci stanowią bazę odniesienia dla regulatorów mocy i napięcia generatora. W stanach innych niż normalne te same, ale zmieniające się parametry pracy sieci źle spełniają rolę parametrów bazowych. Dochodzi do kołysania mocy generatorów. Punkt (parametry) pracy systemu, w którym dochodzi do kołysań mocy, nosi nazwę punktu Hopfa.
Trzecia grupa odnosi się do zachowania sieci, jej sztywności, jej zdolności przesłania zapotrzebowanej mocy do każdego węzła sieci. Tej sprawie poświęcimy więcej uwagi.
Pojęcie sieci sztywnej przyjęło się w literaturze i w praktyce, ponieważ niosło uproszczenia analiz warun-ków współpracy urządzeń technicznych z systemem, w tym generatorów elektrowni i urządzeń odbiorczych, upraszczało wybór zasad działania ich zabezpieczeń, układów sterowania i regulacji. Za upowszechnieniem się pojęcia sieci sztywnej stało przeświadczenie, że praca pojedynczego urządzenia w sieci nie może w sposób zna-czący wpływać na parametry systemu, skoro jego moc jest wielokrotnie mniejsza od mocy całego systemu. Ale system to nie „szyna miedziana”, a zbiór pojedynczych urządzeń wytwórczych i odbiorczych, współpracujących ze sobą poprzez linie przesyłowe czasem o znacznej długości i ograniczonej obciążalności. Zatem fakty są inne. W rzeczywistości sieci sztywnej nie ma. Każda sieć jest elastyczna (podatna, wiotka) i na każde wymuszenie odpowiada zmianą parametrów pracy. Zależy tylko od wielkości i miejsca przyłożenia wymuszenia, czy zmiana parametrów będzie w ogóle zauważalna, czy będzie znacząca, czy wręcz zakłócająca pracę systemu. Niepożąda-na, duża podatność napięcia sieci na zmiany obciążenia mocą bierną bloków El. Ostrołęka, podczas zakłócenia w dniu 26 czerwca 2006 roku, spowodowała wyłączenie bloków z ruchu i zagrożenie awarią systemową [18]. Nieświadome osłabienie zdolności przesyłowej sieci systemu UCTE, przez wyłączenie dwutorowej linii 380 kV w dniu 4 listopada 2006 roku, spowodowało podział tego systemu i zagrożenie wielką awarią systemową [19].
Potrzebę zmian w aktualnie stosowanych układach regulacji generatorów, w celu zapobieżenia wydarze-niom wspomnianym wyżej, sygnalizuje i uzasadnia referat [23].
Elastyczność (podatność) sieci zależy od struktury systemu (struktury sieci, mocy źródeł, sposobu ich regulacji itp.) i parametrów pracy systemu (poziomu napięcia, mocy źródeł itp.). Parametry pracy systemu są funkcją lokalnych bilansów mocy i zależnych od nich przesyłów mocy. Problem lokalnego bilansowania mocy w systemie, w tym charakterystyk mocy odbiorów, charakterystyk generatorów, głównie w odniesieniu do mocy biernej, szczegółowo omawia referat [21]. W referacie bilans mocy biernej przedstawia się, i słusznie, jako czyn-
Kazimierz Oziemblewski / Oddział Zagłębia Węglowego Stowarzyszenia Elektryków PolskichKsawery Opala / Instytut Energetyki Instytut Badawczy Oddział Gdańsk

35
nik wpływający na stan stabilności napięciowej w systemie. Z bilansem mocy czynnej jest podobnie, choć przy-wykliśmy przyjmować, że to rozpływ mocy biernej wpływa na moduły wektorów napięć węzłowych, a rozpływ mocy czynnej na kąty rozchyłu tych wektorów. W ślad za tym powstało pojęcie stabilności kątowej, wdrożono badania na ten temat, a dla bardziej kompleksowej obrony systemów zaproponowano bieżący pomiar fazorów napięcia [8].
Bliższe rozważania na temat zachowania warunków stabilnej pracy systemu elektroenergetycznego wska-zują, że dla oceny stanu (zapasu) stabilności należy uwzględniać wektory (moduły i kąty) napięć węzłowych jako wynik rozpływu mocy czynnej i biernej [2, 11, 17, 25]. Przy badaniu przesyłów dużych mocy widać wyraźnie, że wiązanie poziomów napięć z przesyłem tylko mocy biernej, a kątów rozchyłu wektorów tych napięć z przesyłem tylko mocy czynnej nie jest poprawne. Bywa, że zakładane a priori uproszczenia w gruncie rzeczy nie upraszczają, a komplikują lub wręcz uniemożliwiają uzyskanie rozwiązania.
3. GRADIENT STRAT I METODA DWÓCH ROZPŁYWÓW MOCY
Gradient strat jest wektorem, którego współrzędnymi są pochodne cząstkowe strat policzone względem zmiennych niezależnych w układzie. Do jego wyznaczenia zastosowano metodę Lagrange’a z warunkami Kuh-na-Tuckera, umożliwiającą poszukiwanie ekstremów złożonych funkcji wielu zmiennych w warunkach, kiedy na zmienne nałożone są ograniczenia zapisane w postaci równości i nierówności [2, 11]. W tym materiale prezen-tuje się tę metodę w dużym uproszczeniu, gdy ograniczenia nierównościowe nie występują, co istotnie ograni-cza zapis badanego modelu. Ponadto nie przytacza się przekształceń poszczególnych wzorów, a podaje się ich postaci końcowe.
Poszukuje się ekstremum [min funkcji f(x)] z zastosowaniem metody Lagrange’a.
L(x, λ) = f(x) + ∑i λi [ bi – hi(x) ] (1)
w warunkach ograniczeń opisanych jak niżej:
bi – hi(x) = 0 dla x ∈ W1, i ∈ N
Funkcję (celu) Lagrange’a z uwzględnieniem równań mocy oraz równań rozpływu mocy, zapisanych we współrzędnych prostokątnych, podaje wyrażenie (2):
L = – ∑i Pi + ∆P + ∑i λi { Pi – ( Ui Ji – Vi Ii ) } + ∑i µi { Qi – ( Ui Ii + Vi Ji ) } ++ ∑i ξi { Ui – U0 – ∑k ( Rik Jk + Xik Ik ) } + ∑i ψi { Vi– V0 – ∑k ( Xik Jk – Rik Ik ) }
Oznaczenia : Si = Pi + j Qi – zespolona moc pozorna węzła Ui = Ui + j Vi – zespolone napięcie węzła Ji = Ji + j Ii – zespolony prąd węzła Zik = Rik + j Xik – wyraz zespolonej macierzy impedancji węzłowych λi, µi, ξi, ψi – nieoznaczone czynniki Lagrange’a
Pochodne cząstkowe funkcji L, obliczone względem wszystkich zmiennych w układzie, pozwalają wyzna-czyć współrzędne gradientu funkcji strat ∆P.
Przyrównując do zera wyrażenia dla poszczególnych pochodnych cząstkowych: ∂L/∂xi = 0
otrzymuje się: a) pochodne cząstkowe funkcji L względem mocy węzłowych:
∂ L / ∂Pi = – 1 + ∂ (∆P) / ∂Pi + λi = 0∂ L / ∂Qi = 0 + ∂ (∆P) / ∂Qi + µi = 0
(2)
(3)
Możliwości oceny bieżącego stanu stabilności SEE. Pochodne zamiast charakterystyk

36
a stąd wyrażenia definiujące nieoznaczone współczynniki Lagrange’a λi i µi i równocześnie składowe ope-ratora T. Szostka [2, 11]
T = λi + j µi (4)
albo
Ti = 1 – ∂ (∆P) / ∂Pi – j ∂ (∆P) / ∂Qi (5)
Tak więc wyznaczenie zespolonego operatora T prowadzi bezpośrednio do wyznaczenia pochodnych cząst-kowych strat mocy czynnej w systemie, policzonych względem czynnych i biernych mocy węzłowych, będących współrzędnymi gradientu strat.
b) pochodne cząstkowe funkcji L względem napięć węzłowych:
∂ L / ∂Ui = – λi Ji – µi Ii + ξi = 0∂ L / ∂Vi = λi Ii – µi Ji + ψi = 0
Funkcja L wyraża bilans mocy czynnej. Pochodne cząstkowe mocy czynnej policzone względem składowej rzeczywistej Ui i składowej urojonej Vi zespolonego napięcia węzłowego mogą być uznane jako składowe jakie-goś (dualnego) prądu węzłowego Jd,i. Prąd ten wyrazi się wzorem:
Jd,i = – (ξi + j ψi ) (7)
albo
Jd,i = – conjg (Ti * Ji ) (8)
c) pochodne cząstkowe funkcji L względem prądów węzłowych:
∂L / ∂Ji = UB – λi Ui – µi Vi – ∑k ( ri,k ξk + xik ψk ) = 0∂L / ∂Ii = VB + λi Vi – µi Ui – ∑k ( xi,k ξk – rik ψk ) = 0
Analogicznie jak wyżej, pochodne funkcji L, policzone względem składowych prądu węzłowego Ji, mogą być uznane jako składowe (dualnego) napięcia węzłowego Ud,i.
Ud,i = Ti conjg ( Ui ) (10)
Znając wzory opisujące dualne napięcie węzłowe i dualny prąd węzłowy, można wyznaczyć dualną moc węzłową:
Sd,i = Ti *Ti conjg ( Si ) (11)
Prądy, napięcia i moce węzłowe spełniają pierwotny rozpływ mocy. Dualne prądy, napięcia i moce węzło-we spełniają dualny rozpływ mocy. Stosunek wektora napięcia węzłowego z rozpływu dualnego do sprzężonego wektora napięcia węzłowego z rozpływu pierwotnego pozwala obliczyć współrzędne wektora T w każdym węźle sieci.
Ti = Ud,i / conjg (Ui ) (12)
Zespolony gradient strat ρ, którego współrzędnymi są pochodne cząstkowe strat mocy czynnej, policzone względem czynnych i biernych mocy węzłowych:
(6)
(9)
Kazimierz Oziemblewski / Oddział Zagłębia Węglowego Stowarzyszenia Elektryków PolskichKsawery Opala / Instytut Energetyki Instytut Badawczy Oddział Gdańsk

37
ρi = ∂ (∆P) / ∂Pi + j ∂ (∆P) / ∂Qi (13)
może być wyznaczony wprost z wektora T, jak niżej:
ρ = 1 – T (14)
Dotąd oznaczenia λi i µi oznaczały nieokreślone czynniki Lagrange’a i stanowiły składowe zespolone wek-tora T. Te same oznaczenia bywają używane również wprost jako pochodne cząstkowe strat mocy czynnej:
λi = ∂ (∆ P) / ∂ ( Pi) oraz µi = ∂ (∆ P) / ∂ (Pi) (15)
i w tym znaczeniu będą użyte poniżej jako składowe zespolone wektora ρ.
4. POCHODNE CHARAKTERYSTYK MOCY DOSYŁANYCH DO WĘZŁÓW
Bilanse mocy czynnej i biernej w systemie są spełnione. Suma mocy wytworzonych w systemie (∑PG, ∑QG) jest równa sumie mocy odbieranych (∑PO, ∑QO) plus straty sieciowe (∆P, ∆Q) odpowiednio:
∑ PG = ∑ PO + ∆P , ∑ QG = ∑QO + ∆Q (16)
Z równań bilansów mocy skorzystamy w prowadzonych niżej analizach. W analizach tych przyjmiemy, że zmiennymi niezależnymi będą czynne i bierne moce węzłowe oraz podłużne i poprzeczne przekładnie transfor-matorów, czyli wielkości fizyczne, które można bezpośrednio regulować w systemie (załączać, wyłączać, regu-lować moc, regulować przekładnie). Wszystkie pozostałe wielkości elektryczne, jak prądy węzłowe, napięcia węzłowe itp., będą zmiennymi zależnymi, wyrażonymi jako funkcje zmiennych niezależnych. I nie jest ważne, jakiego rodzaju to będą zależności. A są to z reguły uwikłane zależności nieliniowe. Wiele odbiorów posiada cha-rakterystyki poboru mocy zależne od napięcia. Wszystkie te zależności, o ile tylko są znane, mogą być zapisane w modelu sieci i uwzględnione w obliczeniach rozpływów mocy (pierwotnego i dualnego), w analizach ekonomii czy analizach stanu stabilności systemu.
W badaniach stanu (zapasu) stabilności systemu są ważne przebiegi charakterystyk przesyłanej (dosyłanej do węzłów sieci) czynnej i biernej. Przebiegi tych charakterystyk spróbujemy oceniać, korzystając z ich pochod-nych, obliczanych w węzłach sieci z bieżących parametrów pracy systemu [13, 15, 25]. Podstawy takiego postę-powania, w wielkim skrócie, objaśnimy poniżej.
Na początek spójrzmy na charakterystyki dosyłanej mocy czynnej. Moc pobierana w węźle sieci wyraża się iloczynem pobieranego prądu i napięcia w tym węźle. Jeśli pobierany prąd rośnie od zera aż do wartości prądu zwarcia, to napięcie w węźle spada od jakiejś wartości początkowej do zera. Wykres pobieranej mocy czynnej w funkcji prądu J przedstawia krzywa P na rys. 1. Punkt Pex na rys. 1. oznacza maksymalną moc, jaką można prze-słać w układzie. Wykres strat mocy czynnej, powodowanych przesyłem mocy w sieci, przedstawia krzywa ∆P, a wykres pochodnej tych strat, policzonej względem odbieranej mocy czynnej, podaje krzywa λ. Pochodna strat λ wyraża stosunek przyrostu strat mocy czynnej ∆P w sieci do przyrostu mocy czynnej P , dosyłanej do węzła sieci, odniesionych na rysunku do jednostkowej zmiany prądu obciążenia węzła.
Możliwości oceny bieżącego stanu stabilności SEE. Pochodne zamiast charakterystyk

38
Rys. 1. Przebiegi krzywych mocy czynnej P, strat mocy ∆P i pochodnej λ
Przyrosty funkcji P , przy małym i dużym obciążeniu sieci na rys. 2, obrazują odpowiednio odcinki a i c, przyrosty funkcji ∆P – obrazują odcinki b i d. Przyrost względny (pochodna λ) strat mocy czynnej w sieci, poli-czony względem mocy dosyłanej do węzła sieci (tu rozumiany jako stosunek pokazanych na rys. 2 odcinków b do a) – przy małym obciążeniu sieci będzie równy: λa = b/a, lub jako stosunek odcinków d do c – przy dużym obciążeniu sieci będzie równy: λc = d/c. Powyższe zależności przekazują wprost ważne informacje, jakie niesie pochodna λ. Spróbujmy je przedyskutować.
Rys. 2. Rysunek pomocny przy interpretacji pochodnej strat �
Z definicji λ – pochodna funkcji strat mocy, policzona względem mocy dosyłanej do węzła, wyraża wza-jemną współzależność charakterystyk strat mocy ∆P i mocy P , dosyłanej do węzła sieci – wyraża stosunek przy-rostów względnych (pochodnych) tych charakterystyk. Niesie zatem informacje i o przebiegu krzywej strat ∆P i o przebiegu krzywej mocy czynnej P , dosyłanej do węzła. Stąd wynika bardzo ważne, z punktu prowadzonych tu rozważań, stwierdzenie, że pochodna strat mocy czynnej λ, policzona względem mocy czynnej dowolnego węzła sieci, może być użyta do oceny przebiegu charakterystyki dosyłanej do tego węzła mocy czynnej w funkcji parametrów pracy systemu.
Kazimierz Oziemblewski / Oddział Zagłębia Węglowego Stowarzyszenia Elektryków PolskichKsawery Opala / Instytut Energetyki Instytut Badawczy Oddział Gdańsk

39
Krzywa λ na rys. 1 asymptotycznie rośnie do nieskończoności, jeśli obciążenie węzła P rośnie do wartości Pex. Dzieje się tak nie z powodu jakiejś znaczącej zmiany strat sieciowych w otoczeniu punktu P = Pex. Straty, owszem, wzrastają z kwadratem prądu obciążenia, ale nie są to przyrosty tak gwałtowne. O takim przebiegu wy-kresu krzywej (pochodnej) λ w otoczeniu punktu P = Pex decydują malejące do zera przyrosty mocy P przesyłanej do badanego węzła, stojące w mianowniku we wzorze definiującym λ.
Suma mocy wytwarzanej w sieci ∑PG jest równa sumie mocy odbiorów ∑PO plus straty ∆P. Jednostkowa zmiana mocy odbioru w określonym węźle sieci ∂ (P) powoduje odpowiednią zmianę mocy wytwarzanej i strat przesyłowych:
( ∑ PG) / ∂ ( P) = 1 + λ (17)
Jak szybko rośnie wartość λ, tak szybko musi rosnąć moc wytwarzana w sieci, aby pokryć przyrost za-potrzebowania o jednostkę. Przy założeniu, że λ = 1, w sieci trzeba wytworzyć dwie jednostki mocy. Jedną do pokrycia jednostkowego przyrostu zapotrzebowania w węźle i drugą do pokrycia przyrostu straty. Im bardziej punkt pracy na krzywej P zbliża się do punktu Pex, tym szybciej wyczerpują się możliwości wytwarzania i przesyłu mocy w sieci, tym bliżej do utraty stabilności w systemie. Rosnące wartości λ świadczą o rosnącym zakrzywieniu charakterystyki mocy dosyłanej i zbliżaniu się ekstremum. Innymi słowy, rosnące wartości λ świadczą o maleją-cym zapasie stabilności w danym miejscu (węźle) sieci.
W sieciach systemu, oprócz mocy czynnej P, przesyłana jest również moc bierna Q. Przesył mocy biernej wpływa na wielkość modułu przepływającego prądu i w związku z tym na straty mocy czynnej w sieci. Zmianę strat mocy czynnej w sieci ∆P w funkcji przesyłanej mocy biernej Q wyraża pochodna tych strat policzona wzglę-dem mocy biernej [2, 11, 13, 17]:
μ = ∂ (∆ P) / ∂ (Q) (18)
Przeprowadzone podobne analizy pochodnej λ i pochodnej μ prowadzą do podobnych wniosków. Policzona względem mocy biernej węzła pochodna strat mocy czynnej niesie informacje o przebiegu charakterystyki dosy-łanej do tego węzła mocy biernej w funkcji parametrów pracy systemu. Ponadto obydwie pochodne: λ i μ dążą do nieskończoności w tym samym punkcie (przy tych samych parametrach) pracy systemu. Jest to oczywiste. Jeśli na dowolnym kierunku przesyłu mocy w systemie wyczerpią się możliwości (naturalna zdolność) przesyłu mocy czynnej, to nie można już przesłać więcej mocy biernej. I odwrotnie, jeśli możliwości przesyłowe sieci zostaną wyczerpane do przesyłu mocy biernej, to nie da się już przesłać więcej mocy czynnej.
Czy zatem nadmierne przesyły obydwu mocy równocześnie prowadzą do utraty stabilności w sieci, czy tylko jednej z nich albo której z nich? Odpowiedzi na te pytania niosą same pochodne λ i μ. Przesył tej mocy bar-dziej zbliża system do punktu utraty stabilności, względem której policzona pochodna strat ma większą wartość liczbową. Im większa wartość pochodwej, tym bliżej do punktu ekstremum. Jest to dodatkowa, ważna dla ope-ratora sieci informacja. W przypadku zagrożenia awarią wskazuje ona, której mocy bilans (czynnej czy biernej) należy poprawić w pierwszej kolejności. Pochodne strat sieciowych λ i μ, są policzone jako składowe zespolonego wektora ρ – gradientu 1 strat w sieci:
ρ = λ + j μ (19)
Podobnie pochodne strat sieciowych α i β, policzone względem wzdłużnych (α) i poprzecznych (β) prze-kładni transformatorów, są wyznaczane jako składowe innego zespolonego wektora κ – gradientu 2 strat w sieci:
κ = α + j β (20)
Powyższy wzór odnosi się do wszystkich transformatorów w sieci, niezależnie od tego, czy posiadają regu-lację poprzeczną, skośną czy tylko wzdłużną. Dla transformatorów tylko ze wzdłużną regulacją przekładni obli-czenia są prowadzone z założeniem, że przekładnia poprzeczna (zmienna niezależna) jest zerowa. Współrzędny-mi wektorów ρ i κ są pochodne strat mocy czynnej w sieci, policzone odpowiednio wg czynnych i biernych mocy wszystkich węzłów w sieci oraz wg wzdłużnych i poprzecznych przekładni wszystkich transformatorów w sieci.
Możliwości oceny bieżącego stanu stabilności SEE. Pochodne zamiast charakterystyk
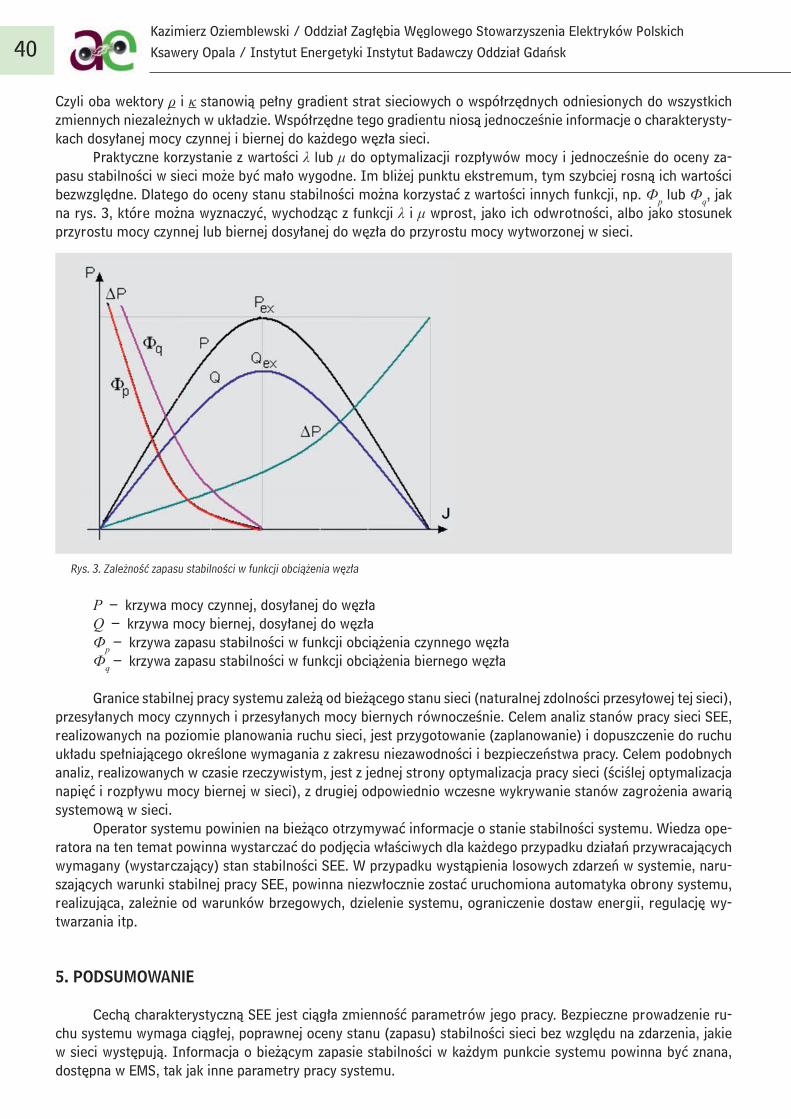
40
Czyli oba wektory ρ i κ stanowią pełny gradient strat sieciowych o współrzędnych odniesionych do wszystkich zmiennych niezależnych w układzie. Współrzędne tego gradientu niosą jednocześnie informacje o charakterysty-kach dosyłanej mocy czynnej i biernej do każdego węzła sieci.
Praktyczne korzystanie z wartości λ lub μ do optymalizacji rozpływów mocy i jednocześnie do oceny za-pasu stabilności w sieci może być mało wygodne. Im bliżej punktu ekstremum, tym szybciej rosną ich wartości bezwzględne. Dlatego do oceny stanu stabilności można korzystać z wartości innych funkcji, np. Фp lub Фq, jak na rys. 3, które można wyznaczyć, wychodząc z funkcji λ i μ wprost, jako ich odwrotności, albo jako stosunek przyrostu mocy czynnej lub biernej dosyłanej do węzła do przyrostu mocy wytworzonej w sieci.
Rys. 3. Zależność zapasu stabilności w funkcji obciążenia węzła
P – krzywa mocy czynnej, dosyłanej do węzłaQ – krzywa mocy biernej, dosyłanej do węzłaФp – krzywa zapasu stabilności w funkcji obciążenia czynnego węzłaФq – krzywa zapasu stabilności w funkcji obciążenia biernego węzła
Granice stabilnej pracy systemu zależą od bieżącego stanu sieci (naturalnej zdolności przesyłowej tej sieci), przesyłanych mocy czynnych i przesyłanych mocy biernych równocześnie. Celem analiz stanów pracy sieci SEE, realizowanych na poziomie planowania ruchu sieci, jest przygotowanie (zaplanowanie) i dopuszczenie do ruchu układu spełniającego określone wymagania z zakresu niezawodności i bezpieczeństwa pracy. Celem podobnych analiz, realizowanych w czasie rzeczywistym, jest z jednej strony optymalizacja pracy sieci (ściślej optymalizacja napięć i rozpływu mocy biernej w sieci), z drugiej odpowiednio wczesne wykrywanie stanów zagrożenia awarią systemową w sieci.
Operator systemu powinien na bieżąco otrzymywać informacje o stanie stabilności systemu. Wiedza ope-ratora na ten temat powinna wystarczać do podjęcia właściwych dla każdego przypadku działań przywracających wymagany (wystarczający) stan stabilności SEE. W przypadku wystąpienia losowych zdarzeń w systemie, naru-szających warunki stabilnej pracy SEE, powinna niezwłocznie zostać uruchomiona automatyka obrony systemu, realizująca, zależnie od warunków brzegowych, dzielenie systemu, ograniczenie dostaw energii, regulację wy-twarzania itp.
5. PODSUMOWANIE
Cechą charakterystyczną SEE jest ciągła zmienność parametrów jego pracy. Bezpieczne prowadzenie ru-chu systemu wymaga ciągłej, poprawnej oceny stanu (zapasu) stabilności sieci bez względu na zdarzenia, jakie w sieci występują. Informacja o bieżącym zapasie stabilności w każdym punkcie systemu powinna być znana, dostępna w EMS, tak jak inne parametry pracy systemu.
Kazimierz Oziemblewski / Oddział Zagłębia Węglowego Stowarzyszenia Elektryków PolskichKsawery Opala / Instytut Energetyki Instytut Badawczy Oddział Gdańsk
41
Zakłócenia stabilnej pracy systemów wynikają z niedostatecznego rozpoznania stanu zagrożenia przed zakłóceniem i ograniczonych możliwości obrony systemów przed kaskadowym rozwojem awarii po wystąpieniu zakłócenia inicjującego awarię. Teoretycznie do utraty stabilności w systemie dochodzi po wyczerpaniu fizycz-nych możliwości sieci na jakimś kierunku przesyłu mocy. Do tego stanu może prowadzić:
• brak wystarczających rezerw w układzie przesyłowym• osłabienie sieci na skutek losowych wyłączeń elementów przesyłowych lub źródeł mocy• niekorzystne charakterystyki odbiorów, powodujące lawiny napięć przy obniżonym napięciu w sieci. Warunkiem bezpiecznej pracy każdego systemu jest zachowanie określonych, lokalnych bilansów mocy
czynnej i biernej. Przesyłanie dowolnie dużych mocy na dowolnie duże odległości nie jest możliwe. W sieci wy-stępują, uwarunkowane prawami fizycznymi, naturalne ograniczenia zdolności przesyłowej na wielu kierunkachprzesyłu mocy, których próba przekroczenia kończy się utratą stabilności.
Zadania optymalizacji pracy SEE oraz badanie jego stabilności można realizować w czasie rzeczywistym, przy wykorzystaniu tych samych danych pomiarowych i przy użyciu podobnych narzędzi programowych. W obu przypadkach korzysta się z algorytmów obliczania gradientu strat. Dodatkową zaletą metody jest to, że jej wyni-kami są liczby względne, o jednakowym znaczeniu (interpretacji) dla wszystkich węzłów sieci i różnych stanów pracy sieci. Raz określone wartości krytyczne będą ważne dla różnych układów (normalnych, remontowych) i stanów pracy sieci, w tym dla stanów awaryjnych. Współrzędne wektora Φ niosą istotne informacje o stanie stabilności SEE, na podstawie których mogą być sprawdzane planowane do ruchu układy pracy sieci, podej-mowane decyzje operatorskie lub realizowane szybkie działania automatyczne w celu obrony SEE przed utratą stabilności.
Możliwości oceny bieżącego stanu stabilności SEE. Pochodne zamiast charakterystyk
42
BIBLIOGRAFIA
1. Findeisen W., Szymanowski J., Wierzbicki A., Metody obliczeniowe optymalizacji, WPW, Warszawa 1972.2. Szostek T., Algorytm optymalizacji poziomów napięcia w sieciach elektroenergetycznych oparty na metodzie dwóch
rozpływów mocy, Energetyka, nr 2, 1975.3. Kremens Z., Sobierajski M., Analiza systemów elektroenergetycznych, NWT, Warszawa 1996.4. On-line, Voltage Stability Assessment of Power System – An Aproach of Black – box Modeling, Tampere University
of Technology 2001.5. Final Report on the August 14, 2003 Blackout in the United States and Canada. Causes and Recommendations. U.S.
– Canada Power System Outage Task Force, April 2004.6. Final Report of the Investigation Committee on the 28 September 2003 Blackout in Italy, UCTE, Apirl 2004.7. Kasprzyk S., Bezpieczeństwo pracy polskiego systemu elektroenergetycznego, Ogólnopolskie seminarium „Blackout
a krajowy system elektroenergetyczny”, Poznań, 2004, w: Energetyka, zeszyt tematyczny nr II, 2004.8. Machowski J., Zastosowanie rozległych systemów pomiarowych w automatyce przeciwawaryjnej systemu elektro-
energetycznego, Instytut Elektroenergetyki Politechniki Warszawskiej, 2005. 9. Machowski J., Regulacja i stabilność systemu elektroenergetycznego, Oficyna Wydawnicza Politechniki Warszaw-
skiej, Warszawa 2007.10. Machowski J., Bialek J.W., Bumby J.R., Power System Dynamics Stability end Control, John Wiley and Sons, Ltd.
2008.11. Oziemblewski K., Optymalizacja napięć w węzłach dla celów prowadzenia ruchu systemu elektroenergetycznego,
praca doktorska, Politechnika Śląska, Gliwice, 1975. 12. Oziemblewski K., Największe awarie systemowe w 2003 roku, Śląskie Wiadomości Elektryczne, 1, 2005. 13. Oziemblewski K., O możliwościach oceny warunków pracy SE w stanach zagrożenia, Energetyka, 8, 2006. 14. Gładyś H., Orzechowski A., Oziemblewski K., O konferencji CIGRE 2006 i zagrożeniach w pracy systemu elektro-
energetycznego, Seminarium SEP, Biuletyn Miesięczny PSE SA, 11, 2006. 15. Oziemblewski K., Regulacja napięcia a stabilność pracy sieci systemu elektroenergetycznego, Automatyka Elektro-
energetyczna, 2, 2007.16. Oziemblewski K., Koordynacja poziomów regulacji napięcia w KSE, seminarium ’07, Działania automatyki elektro-
energetycznej w warunkach awaryjnych systemu, Bielsko-Biała 2007.17. Oziemblewski K., Naturalna zdolność przesyłowa sieci jako kryterium oceny stabilności systemu elektroenergetycz-
nego, Wiadomości Elektrotechniczne, nr 9, 2007. 18. Weryfikacja raportu wstępnego z analizy awarii napięciowej w KSE, 26 czerwca 2006, Instytut Energoelektryki Po-
litechniki Wrocławskiej, Wrocław, wrzesień/październik 2006. 19. Awaria systemowa w dniu 4 listopada 2006, raport końcowy, UCTE, 2007.20. Voltage Stability Improvement Using Static Var Compensator in Power System, Leonardo Journal of Science, I–VI
2009.21. Sobierajski M., Rojewski W., Wpływ strat mocy biernej na wystąpienie lawiny napięcia w sieci przesyłowej, APE ’09,
Jurata 3–5.06.2009.22. Madajewski K., Sobczak B., Trębski R., Dynamiczne aspekty utraty stabilności napięciowej, APE ’09, Jurata
3–5.06.2009.23. Klucznik M., Małkowski R., Szczeciński P., Zajczyk R., Wpływ obecnie stosowanych układów regulacji generatorów
na możliwości pogłębienia awarii napięciowej. APE ’09, Jurata 3–5.06.2009.24. Krebs R., Styczyński Z.A., SiGuard system do zapobiegania blackoutom ze szczególnym uwzględnieniem analizy
działań zabezpieczających w warunkach utraty stabilności napięciowej, Elektroenergetyka Współczesność i Rozwój, nr 2–3, 2010.
25. Program Q-5 monitorowania pracy sieci dla potrzeb systemu SORN w ODM Bydgoszcz, Instytut Energetyki o. Gdańsk, 2010.
Kazimierz Oziemblewski / Oddział Zagłębia Węglowego Stowarzyszenia Elektryków PolskichKsawery Opala / Instytut Energetyki Instytut Badawczy Oddział Gdańsk

43

44Stefan Paszek / Politechnika ŚląskaPiotr Pruski / Politechnika Śląska
Autorzy / Biografie
Piotr PruskiGliwice / Polska
Ukończył studia z wyróżnieniem (2009) i został doktorantem na Wydziale Elektrycznym Politechni-ki Śląskiej. Obszarem jego zainteresowań badaw-czych są zagadnienia związane z analizą pracy sys-temu elektroenergetycznego. Jest współautorem dwunastu artykułów i referatów, opublikowanych w kraju i za granicą, dotyczących oceny stabilno-ści kątowej systemu elektroenergetycznego oraz estymacji parametrów modeli matematycznych elementów zespołów wytwórczych systemu elek-troenergetycznego. Od początku studiów doktoranckich bierze udział w pracach związanych z grantem Ministerstwa Nauki i Szkolnictwa Wyższego.
Stefan PaszekGliwice / Polska
Ukończył studia na Wydziale Automatyki, Elektro-niki i Informatyki Politechniki Śląskiej w Gliwicach (1978). Zainteresowania naukowe: analiza systemu elektroenergetycznego SEE w stanach nieustalo-nych, stabilność kątowa SEE, optymalizacja i polio-tymalizacja stabilizatorów systemowych oraz re-gulatorów napięcia generatorów synchronicznych, estymacja parametrów modeli zespołów wytwór-czych SEE, nowe modele generatorów synchro-nicznych przy zastosowaniu techniki sztucznej sieci neuronowej, zastosowanie regulatorów rozmytych w układach regulacji maszyn elektrycznych.Autor i współautor 118 publikacji, w tym dwóch monografii. Współautor trzech podręczników aka-demickich. Promotor dwóch ukończonych i trzech otwartych przewodów doktorskich z dyscypliny na-ukowej elektrotechnika. Recenzent pięciu rozpraw doktorskich i jednej rozprawy habilitacyjnej.
45
OCENA STABILNOŚCI KĄTOWEJ SYSTEMU ELEKTROENERGETYCZNEGO NA PODSTAWIE ANALIZY WYBRANYCH STANÓW ZAKŁÓCENIOWYCH
dr hab. inż. Stefan Paszek, prof. nadzw. Politechniki Śląskiej / Politechnika Śląskamgr inż. Piotr Pruski / Politechnika Śląska
1. WSTĘP
Kwestią podstawową w działaniach zmierzających do poprawy stabilności kątowej systemu elektroenerge-tycznego (SEE) jest opracowanie metody oceny tej stabilności. Do oceny stabilności kątowej można wykorzystać wiele metod analitycznych, opartych na modelowaniu matematycznym SEE i analizie wartości własnych macierzy stanu SEE. Wartości własne, obliczane z równań stanu, zależą od wartości elementów macierzy stanu systemu, a pośrednio od przyjętych modeli elementów systemu i ich niepewnych parametrów. Wartości własne można również obliczyć z dobrą dokładnością na podstawie analizy rzeczywistych przebiegów zakłóceniowych pojawia-jących się w SEE po różnych zakłóceniach. W tym przypadku na wyniki obliczeń nie oddziałuje przyjęty model SEE i jego parametry, tylko aktualny stan pracy układu. Znajomość wartości własnych macierzy stanu SEE pozwala na wyznaczenie wskaźników stabilności SEE [1] oraz zapasu stabilności SEE. Celem niniejszego artykułu jest ocena dokładności obliczeń elektromechanicznych wartości własnych macierzy stanu SEE, na podstawie przebie-gów zakłóceniowych mocy chwilowej (często nazywanych przebiegami mocy czynnej) w zespołach wytwórczych, w zależności od złożoności analizowanego SEE oraz stopnia tłumienia przebiegów mocy chwilowej.
2. ZLINEARYZOWANY MODEL SYSTEMU ELEKTROENERGETYCZNEGO
Zlinearyzowany w punkcie pracy model SEE opisany jest równaniem stanu i równaniem wyjścia [2]:
UBXAX (1)
UDXCY � (2)
gdzie: ΔX, ΔU, ΔY, – odchyłki wektora zmiennych stanu, wektora wymuszeń i wektora zmiennych wyj-ściowych. Współczynniki macierzy A, B, C i D równań stanu i wyjścia SEE są obliczane dla ustalonego punktu pracy.
Ocena stabilności kątowej systemu elektroenergetycznego na podstawie analizy wybranych stanów zakłóceniowych
Streszczenie
W artykule przedstawiono metodę oceny stabil-ności kątowej wielomaszynowego systemu elektroener-getycznego, na podstawie analizy wybranych stanów zakłóceniowych. Do oceny stabilności kątowej wykorzy-stano elektromechaniczne wartości własne, obliczone na podstawie przebiegów zakłóceniowych mocy chwilowej w poszczególnych zespołach wytwórczych, po wystąpieniu zakłócenia w postaci prostokątnego impulsu o określonej długości, wprowadzonego do układu regulacji napięcia jednego z zespołów wytwórczych. Przeanalizowano wpływ czasu trwania impulsu na dokładność obliczeń wartości
własnych oraz na amplitudę kołysań mocy chwilowej. Ana-lizę przeprowadzono dla różnych wartości współczynników wzmocnienia stabilizatorów systemowych w poszczegól-nych zespołach wytwórczych, czemu odpowiada różne tłumienie kołysań mocy chwilowej w systemie elektro-energetycznym. Wartości własne zostały obliczone przy użyciu algorytmu hybrydowego, stanowiącego połączenie algorytmów genetycznego i gradientowego. Dla wybra-nych przypadków przeprowadzono analizę statystyczną dokładności obliczeń elektromechanicznych wartości własnych.

46
Przebiegi wielkości wyjściowych zlinearyzowanego modelu systemu można obliczyć bezpośrednio, cał-kując równanie stanu, lub z wykorzystaniem wartości i wektorów własnych macierzy stanu A [2]. Przebieg da-nej wielkości wyjściowej stanowi superpozycję składowych modalnych zależnych od wartości własnych i wek-torów własnych macierzy stanu. Przykładowo, dla zakłócenia w postaci impulsu Diraca wielkości wejściowej ΔU(t)= ΔUδ(t) przebieg i-tej wielkości wyjściowej (przy D = 0) ma postać [2]:
UeFY
n
1h
tihi
h
(3)
gdzie: λh– h-ta wartość własna macierzy stanu, Fih– czynnik udziału h-tej wartości własnej w przebiegu i wielkości wyjściowej.
W przypadku przebiegów kołysań mocy chwilowej w SEE decydujące znaczenie mają tzw. elektromecha-niczne wartości własne, które związane są z ruchem wirników zespołów wytwórczych. Są to zespolone sprzężone wartości własne o częściach urojonych, odpowiadających zakresowi częstotliwości (0,1÷2 Hz), a więc ich części urojone mieszczą się w zakresie (0,63÷12,6 rad/s). Elektromechaniczne wartości własne w różny sposób in-terweniują w przebiegach mocy chwilowej poszczególnych zespołów wytwórczych, co jest związane z różnymi wartościami ich czynników udziału.
3. PRZYKŁADOWE OBLICZENIA
Wykorzystana w badaniach metoda obliczeń elektromechanicznych wartości własnych polega na aprok-symacji przebiegów mocy chwilowej w poszczególnych zespołach wytwórczych za pomocą wyrażenia (3). Elek-tromechaniczne wartości własne i czynniki udziału poszczególnych składowych modalnych są nieznanymi para-metrami tej aproksymacji. W procesie aproksymacji parametry te dobierane są iteracyjnie w taki sposób, aby zminimalizować wartość funkcji celu, określonej jako błąd średniokwadratowy, występujący między przebiegiem aproksymowanym a aproksymującym:
n
1i
2
)a(i)m(iw PP F��F�� (4)
gdzie: λ – wektor elektromechanicznych wartości własnych, F – wektor czynników udziału, indeks m ozna-cza przebieg aproksymowany, a indeks a przebieg aproksymujący mocy chwilowej P, obliczony na podstawie poszukiwanych wartości własnych i czynników udziału. Do minimalizacji funkcji celu (4) wykorzystano algorytm hybrydowy, stanowiący szeregowe połączenie algorytmów genetycznego i gradientowego. Wyniki algorytmu genetycznego stanowią punkt startowy dla algorytmu gradientowego. Algorytm genetyczny poszukuje minimum globalnego funkcji celu w zadanym przedziale wyznaczanych parametrów. Punkt startowy wybierany jest losowo z przedziału poszukiwań, nie ma więc konieczności jego dokładnego określania. Algorytm ten jest jednak wolno-zbieżny. Algorytm gradientowy jest szybkozbieżny, ale poszukuje on minimum lokalnego funkcji celu, co powodu-je, że początkowe wartości parametrów muszą być dobrane starannie, aby uzyskać poprawne wyniki. Szeregowe połączenie algorytmów genetycznego i gradientowego eliminuje ich podstawowe wady [3].
Docelowo do obliczeń, jako dane wejściowe (aproksymowane w czasie obliczeń), wykorzystywane będą przebiegi mocy chwilowej pochodzące z pomiarów, jednak w celu sprawdzenia metody obliczeń na razie wyko-rzystywane są przebiegi mocy chwilowej uzyskane z symulacji przy użyciu modelu SEE. Jako punkt odniesienia przyjęto wartości własne i czynniki udziału obliczane na podstawie przyjętej struktury i parametrów modelu.
Przykładowe obliczenia przeprowadzono dla 7-maszynowego SEE Cigre i 4-maszynowego SEE (rys. 1). 4-maszynowy SEE uzyskano poprzez modyfikację 7-maszynowego SEE, przyjmując trzy zespoły wytwórcze jakowęzły odbiorcze.
Stefan Paszek / Politechnika ŚląskaPiotr Pruski / Politechnika Śląska
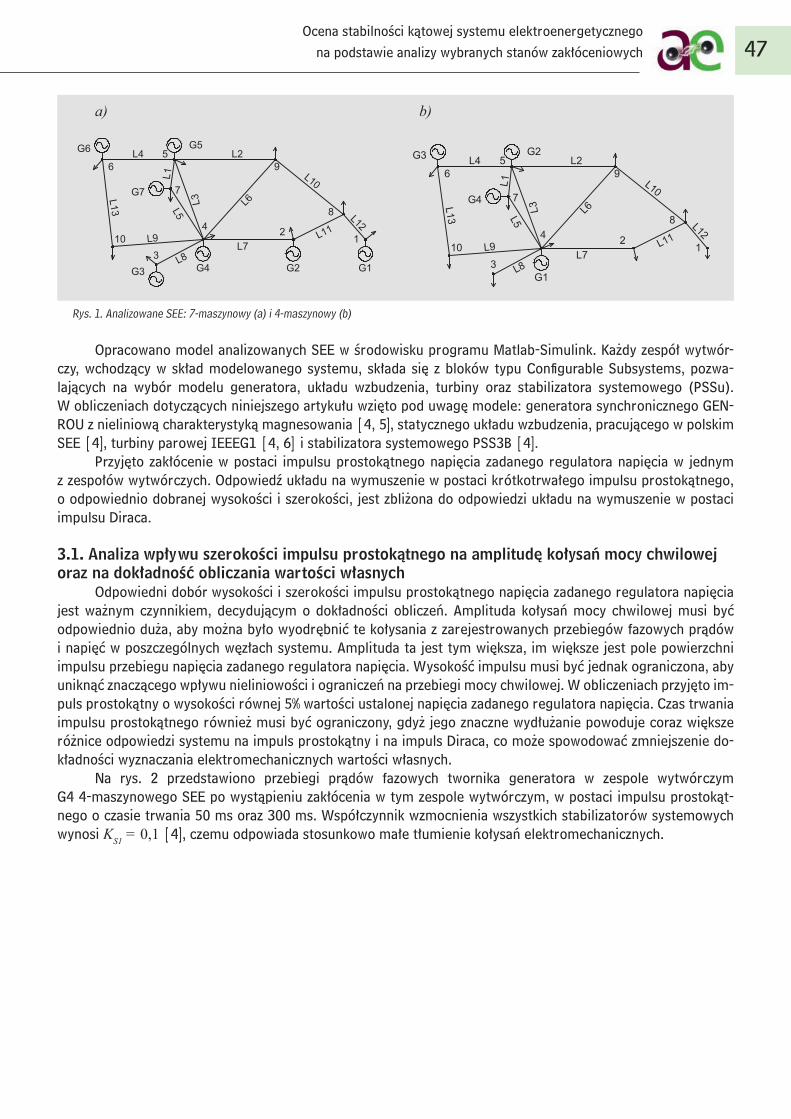
47
Rys. 1. Analizowane SEE: 7-maszynowy (a) i 4-maszynowy (b)
Opracowano model analizowanych SEE w środowisku programu Matlab-Simulink. Każdy zespół wytwór-czy, wchodzący w skład modelowanego systemu, składa się z bloków typu Configurable Subsystems, pozwa-lających na wybór modelu generatora, układu wzbudzenia, turbiny oraz stabilizatora systemowego (PSSu). W obliczeniach dotyczących niniejszego artykułu wzięto pod uwagę modele: generatora synchronicznego GEN-ROU z nieliniową charakterystyką magnesowania [4, 5], statycznego układu wzbudzenia, pracującego w polskim SEE [4], turbiny parowej IEEEG1 [4, 6] i stabilizatora systemowego PSS3B [4].
Przyjęto zakłócenie w postaci impulsu prostokątnego napięcia zadanego regulatora napięcia w jednym z zespołów wytwórczych. Odpowiedź układu na wymuszenie w postaci krótkotrwałego impulsu prostokątnego, o odpowiednio dobranej wysokości i szerokości, jest zbliżona do odpowiedzi układu na wymuszenie w postaci impulsu Diraca.
3.1. Analiza wpływu szerokości impulsu prostokątnego na amplitudę kołysań mocy chwilowej oraz na dokładność obliczania wartości własnych
Odpowiedni dobór wysokości i szerokości impulsu prostokątnego napięcia zadanego regulatora napięcia jest ważnym czynnikiem, decydującym o dokładności obliczeń. Amplituda kołysań mocy chwilowej musi być odpowiednio duża, aby można było wyodrębnić te kołysania z zarejestrowanych przebiegów fazowych prądów i napięć w poszczególnych węzłach systemu. Amplituda ta jest tym większa, im większe jest pole powierzchni impulsu przebiegu napięcia zadanego regulatora napięcia. Wysokość impulsu musi być jednak ograniczona, aby uniknąć znaczącego wpływu nieliniowości i ograniczeń na przebiegi mocy chwilowej. W obliczeniach przyjęto im-puls prostokątny o wysokości równej 5% wartości ustalonej napięcia zadanego regulatora napięcia. Czas trwania impulsu prostokątnego również musi być ograniczony, gdyż jego znaczne wydłużanie powoduje coraz większe różnice odpowiedzi systemu na impuls prostokątny i na impuls Diraca, co może spowodować zmniejszenie do-kładności wyznaczania elektromechanicznych wartości własnych.
Na rys. 2 przedstawiono przebiegi prądów fazowych twornika generatora w zespole wytwórczym G4 4-maszynowego SEE po wystąpieniu zakłócenia w tym zespole wytwórczym, w postaci impulsu prostokąt-nego o czasie trwania 50 ms oraz 300 ms. Współczynnik wzmocnienia wszystkich stabilizatorów systemowych wynosi KS1 = 0,1 [4], czemu odpowiada stosunkowo małe tłumienie kołysań elektromechanicznych.
a) b)
G6 G5
G3
G7
G4 G2 G1
L4
L13
7L6
L2
L10
L11L12
L7
L5
L1
L9
L8
L3
65
4
3
21
8
9
10
G3 G2
G4
G1
L4
L13
7
L6
L2
L10
L11
L12
L7
L5
L1
L9
L8
L3
65
4
3
21
8
9
10
Ocena stabilności kątowej systemu elektroenergetycznego na podstawie analizy wybranych stanów zakłóceniowych
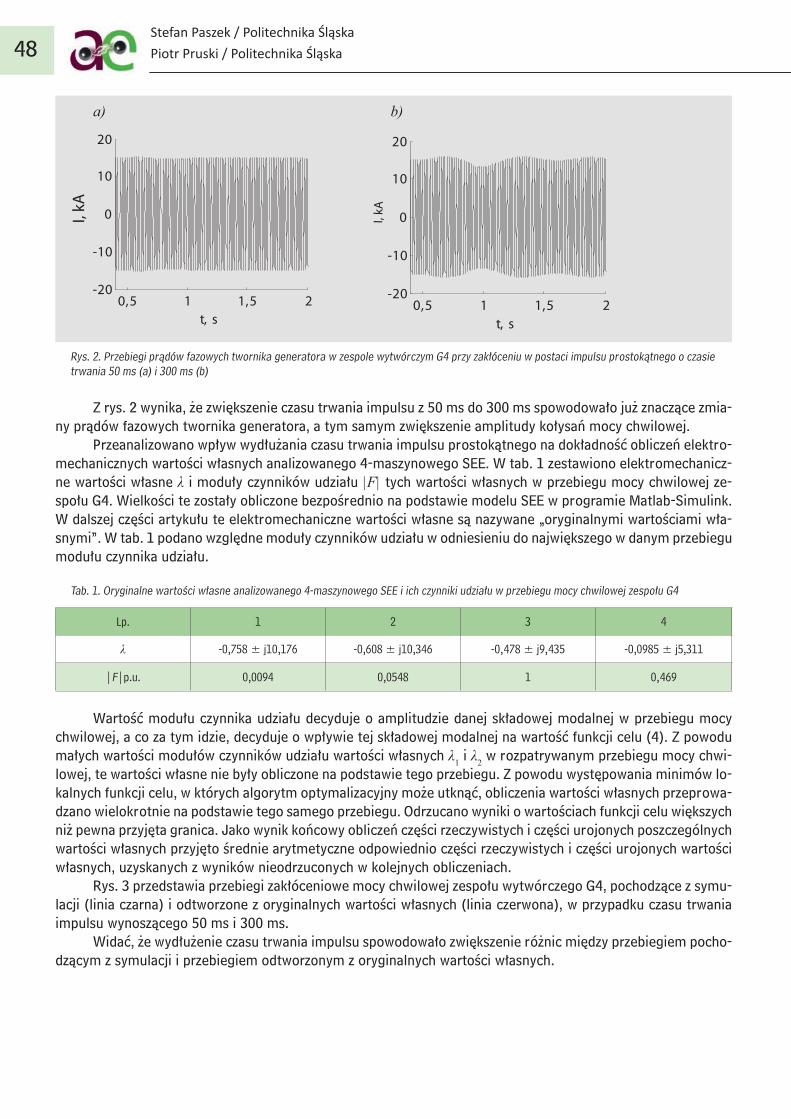
48
Rys. 2. Przebiegi prądów fazowych twornika generatora w zespole wytwórczym G4 przy zakłóceniu w postaci impulsu prostokątnego o czasie trwania 50 ms (a) i 300 ms (b)
Z rys. 2 wynika, że zwiększenie czasu trwania impulsu z 50 ms do 300 ms spowodowało już znaczące zmia-ny prądów fazowych twornika generatora, a tym samym zwiększenie amplitudy kołysań mocy chwilowej.
Przeanalizowano wpływ wydłużania czasu trwania impulsu prostokątnego na dokładność obliczeń elektro-mechanicznych wartości własnych analizowanego 4-maszynowego SEE. W tab. 1 zestawiono elektromechanicz-ne wartości własne λ i moduły czynników udziału |F| tych wartości własnych w przebiegu mocy chwilowej ze-społu G4. Wielkości te zostały obliczone bezpośrednio na podstawie modelu SEE w programie Matlab-Simulink. W dalszej części artykułu te elektromechaniczne wartości własne są nazywane „oryginalnymi wartościami wła-snymi” . W tab. 1 podano względne moduły czynników udziału w odniesieniu do największego w danym przebiegu modułu czynnika udziału.
Tab. 1. Oryginalne wartości własne analizowanego 4-maszynowego SEE i ich czynniki udziału w przebiegu mocy chwilowej zespołu G4
Lp. 1 2 3 4
λ -0,758 ± j10,176 -0,608 ± j10,346 -0, 478 ± j9, 435 -0,0985 ± j5,311
|F|p.u. 0,0094 0,0548 1 0, 469
Wartość modułu czynnika udziału decyduje o amplitudzie danej składowej modalnej w przebiegu mocy chwilowej, a co za tym idzie, decyduje o wpływie tej składowej modalnej na wartość funkcji celu (4). Z powodu małych wartości modułów czynników udziału wartości własnych λ1 i λ2 w rozpatrywanym przebiegu mocy chwi-lowej, te wartości własne nie były obliczone na podstawie tego przebiegu. Z powodu występowania minimów lo-kalnych funkcji celu, w których algorytm optymalizacyjny może utknąć, obliczenia wartości własnych przeprowa-dzano wielokrotnie na podstawie tego samego przebiegu. Odrzucano wyniki o wartościach funkcji celu większych niż pewna przyjęta granica. Jako wynik końcowy obliczeń części rzeczywistych i części urojonych poszczególnych wartości własnych przyjęto średnie arytmetyczne odpowiednio części rzeczywistych i części urojonych wartości własnych, uzyskanych z wyników nieodrzuconych w kolejnych obliczeniach.
Rys. 3 przedstawia przebiegi zakłóceniowe mocy chwilowej zespołu wytwórczego G4, pochodzące z symu-lacji (linia czarna) i odtworzone z oryginalnych wartości własnych (linia czerwona), w przypadku czasu trwania impulsu wynoszącego 50 ms i 300 ms.
Widać, że wydłużenie czasu trwania impulsu spowodowało zwiększenie różnic między przebiegiem pocho-dzącym z symulacji i przebiegiem odtworzonym z oryginalnych wartości własnych.
a) b)
�
���� �� ���� ������
����
��
���
���
�� �� �
�
�����
�����
�
���� �� ���� ������
����
��
���
���
�� �� �
�
Stefan Paszek / Politechnika ŚląskaPiotr Pruski / Politechnika Śląska

49
Rys. 3. Przebiegi zakłóceniowe mocy chwilowej zespołu wytwórczego G4 przy zakłóceniu w postaci impulsu prostokątnego o czasie trwania 50 ms (a) i 300 ms (b)
Na rys. 4 przestawiono histogramy części rzeczywistej i części urojonej wartości własnej λ3, wyznaczonych na podstawie analizy przebiegów zakłóceniowych dla impulsu o czasie trwania 50 ms i 300 ms. Czerwone słupki oznaczają wyniki uwzględnione w dalszej analizie, a zielone słupki oznaczają wyniki odrzucone. Pionowe cienkie linie, znajdujące się w środku histogramów, odpowiadają oryginalnym wartościom własnym.
��� �� �� �� �� ���
����
���
��
��
���
�����
���
�
��
��
�� ����
�
a) b)
���
�
�� ����
�
��� �� �� �� �� ���
����
����
����
��
���
���
���
�����
���
�
��
��
Rys. 4. Histogramy części rzeczywistej i urojonej wartości własnej λ3, obliczonych na podstawie przebiegów mocy chwilowej, przy zakłóceniu impulsem prostokątnym o czasie trwania 50 ms (a) i 300 ms (b)
W tab. 2 zestawiono błędy obliczeń wartości własnych λ3 i λ4 dla kilku czasów trwania impulsu timp.
a)
b)�
��� ��� �� ����
���
���
���
���
� ��������
��������
�
�� �� ��� �����
���
���
���
���
���������
�
��������
��������
�
��� ��� �� ����
���
���
���
���
� ��������
�
�� �� ��� �����
���
���
���
���
���������
�
��������
Ocena stabilności kątowej systemu elektroenergetycznego na podstawie analizy wybranych stanów zakłóceniowych

50
Tab. 2. Błędy obliczeń wartości własnych λ3 i λ4 dla różnych czasów trwania impulsu timp
timp 50 ms 200 ms 300 ms 400 ms 500 ms
Δλ3(-18,3 ± j9,9) × 10-3 (-3,35 ± j1,09) × 10-2 (-125 j6,14) × 10-3 -0,384
±
j0.112 -1,589
±
j0,675
Δλ4(-4,7 ± j1,24) × 10-3 (-2,06 ± j2, 49) × 10-3 (-2,29 ± j6,62) × 10-3 (-1,28 ± j1,66) × 10-2 (-3, 4 ± j3,06) × 10-2
Można zauważyć, że wraz ze wzrostem czasu trwania impulsu zwiększają się błędy obliczeń wartości wła-snych.
3.2. Obliczenia wartości własnych 7-maszynowego SEE przy małym tłumieniu kołysańW tab. 3, 4 i 5 zestawiono elektromechaniczne wartości własne analizowanego 7-maszynowego SEE,
względne moduły ich czynników udziału oraz błędy bezwzględne obliczeń w przypadku współczynników wzmoc-nienia wszystkich stabilizatorów KS1 = 0,1. Pogrubiono względne moduły czynników udziału wartości własnych, które zostały obliczone na podstawie przebiegu mocy chwilowej danego zespołu wytwórczego.
Obliczenie wartości własnych przebiegało dwuetapowo. Najpierw obliczono wartości własne λ3 - λ6 o więk-szych wartościach części rzeczywistych (mniejszych modułach części rzeczywistych), odpowiadające modom słabiej tłumionym, przy pominięciu wartości własnych o mniejszych wartościach części rzeczywistych λ1 i λ2. W drugim etapie obliczono wartości własne o mniejszych wartościach części rzeczywistych, uwzględniając zna-jomość wartości własnych λ3 - λ6.
Tab. 3. Elektromechaniczne oryginalne wartości własne 7-maszynowego SEE przy KS1 = 0,1
Lp. 1 2 3 4 5 6
λ -0,781 ± j10,177 -0,602 ± j10,507 -0,498 ± j9, 476 -0,327 ± j8,642 -0,251 ± j7,895 -0,0091 ± j6,540
Tab. 4. Względne moduły czynników udziału wartości własnych 7-maszynowego SEE przy współczynnikach wzmocnienia wszystkich stabiliza-torów KS1 = 0,1
Zespół wytwórczyG1 G2 G3 G4 G5 G6 G7
|F1|p.u. 0,0038 0,0212 0,0194 0,1005 0,0848 0,2260 0,0084
|F2|p.u. 0,0041 0,2026 0,1591 1 0,0923 0,2404 0,0585
|F3|p.u. 0,0210 0,5278 0,2858 0,7884 1 1 1
|F4|p.u. 0, 4289 0,5829 0,0416 0,0300 0,0068 0,00032 0,0219
|F5|p.u. 0,1079 0,0932 1 0,1995 0,2106 0,0996 0,3650
|F6|p.u. 1 1 0,1972 0,2508 0,1222 0,0921 0,1849
Tab. 5. Błędy bezwzględne obliczeń wartości własnych 7-maszynowego SEE przy KS1 = 0,1
Zespół wytwórczy
G1 G2 G3 G4 G5 G6 G7
Δλ1 – – – – -0,012
±
j0,249 0,058 ± j0,258 –
Δλ2 – -0,618
±
j3,402 -0,016 ± j0,118 0,021
±
j0,062 -0,087 ± j0,184 0,031
±
j1,067 –
Δλ3 – -0,309 ± j0,331 -0,179 ± j0,182 -0,003 ± j0,088 0,008 ± j0,011 0,032 ± j0,004 -0,031 ± j0,016
Δλ4 -0,006 ± j0,034 -0,053 ± j0,083 – – – – –
Δλ5 -0,013
±
j0,078 – -0,002 ± j0,009 – 0,001
±
j0,001 – 0,002
±
j0,003
Δλ6 -0,001
±
j0,001 0,001
±
j0,003 0,002
±
j0,003 – 0,003 ± j0,001 – 0,003 ± j0,001
Stefan Paszek / Politechnika ŚląskaPiotr Pruski / Politechnika Śląska
±

51
3.3. Obliczenia wartości własnych 7-maszynowego SEE przy większym tłumieniu kołysańW tym podrozdziale analizowano 7-maszynowy SEE przy powiększonym tłumieniu kołysań elektrome-
chanicznych. Zwiększenie tłumienia kołysań zrealizowano poprzez powiększenie współczynników wzmocnienia wszystkich stabilizatorów systemowych (typu PSS3B) do wartości KS1 = 0,7. W tab. 6, 7 i 8 zestawiono elektro-mechaniczne wartości własne analizowanego SEE, względne moduły ich czynników udziału oraz błędy obliczeń.
Tab. 6. Elektromechaniczne oryginalne wartości własne 7-maszynowego SEE przy KS1 = 0,7
Lp. 1 2 3 4 5 6
λ -1,393±j10,075 -1,262±j11,161 -1,091±j10,680 -0,9576±j8,993 -0,765±j7,803 -0,571±j6,536
Tab. 7. Względne moduły czynników udziału wartości własnych 7-maszynowego SEE przy współczynnikach wzmocnienia wszystkich stabiliza-torów KS1 = 0,7
Zespół wytwórczy
G1 G2 G3 G4 G5 G6 G7
|F1|p.u. 0,1398 0,8164 0,3621 1 1 1 1
|F2|p.u. 0,0022 0,0392 0,0226 0,1128 0,0222 0,3458 0,0081
|F3|p.u. 0,0189 0,3735 0,2111 0,7727 0,1842 0,3630 0,0867
|F4|p.u. 0,5154 0,8520 0,0275 0,0248 0,0249 0,0166 0,0235
|F5|p.u. 0,2792 0,1373 1 0,1329 0,1999 0,1711 0,2258
|F6|p.u. 1 1 0,2526 0,1410 0,0850 0,0977 0,1105
Tab. 8. Błędy bezwzględne obliczeń wartości własnych 7-maszynowego SEE przy KS1 = 0,7
Zespół wytwórczy
G1 G2 G3 G4 G5 G6 G7
Δλ1 – -1,584 ± j0,683 -0,379 ± j0,168 -0,088
±
j0,314 -0,228
±
j0,143 -0,152 ± j0,006 -0,070 ± j0,089
Δλ2 – – – 0,105
±
j2,563 – -0,195 ± j0,228 –
Δλ3 – -1,582 ± j4,000 -0,077 ± j0,099 0,007 ± j0,017 0,159 j1, 424 – –
Δλ4 -0,128
±
j0,207 0,007
±
j0,059 – – – – –
Δλ5 -0,031 j0,053 – 0,013 ± j0,085 -0,077
±
j0,159 -0,139 ± j1,229 – 0,034
±
j0,033
Δλ6 -0,018
±
j0,007 0,012
±
j0,025 -0,002 ± j0,119 0,010
±
j0,061 -0,021
±
j0,062 – 0,021 ± j0,150
3. 4. Obliczenia wartości własnych 4-maszynowego SEE przy małym tłumieniu kołysańW celu zbadania wpływu złożoności analizowanego SEE na dokładność obliczeń wartości własnych przepro-
wadzono obliczenia wartości własnych 4-maszynowego SEE w przypadku wzmocnienia wszystkich stabilizatorów KS1 = 0,1 (takim, jak w p. 3.2.). W tab. 9 zestawiono błędy obliczeń elektromechanicznych wartości własnych. Wyznaczanie wartości własnych w tym przypadku również przebiegało dwuetapowo. Najpierw wyznaczono war-tości własne λ3 i λ4, a następnie, przy uwzględnieniu ich znajomości, wyznaczono wartości własne λ1 i λ2.
Ocena stabilności kątowej systemu elektroenergetycznego na podstawie analizy wybranych stanów zakłóceniowych
±

52
BIBLIOGRAFIA
Tab. 9. Błędy bezwzględne obliczeń wartości własnych 4-maszynowego SEE przy KS1 = 0,1
Zespół wytwórczy
G1 G2 G3 G4
Δλ1 0,17080
±
j0,75264 -0,85943
±
j1,41602 -0,16195 ± j0,32636 –
Δλ2 0,00072
±
j0,02339 -0,19605±j0,05164 -0,12014
±
j0,06776 –
Δλ3 0,01658 ± j0,01057 0,01838
±
j0,00047 0,02593 ± j0,08586 -0,01605 ± j0,00962
Δλ4 0,00094 ± j0,00135 -0,00061 ± j0,00231 0,00850
±
j0,01901 -0,00097 ± j0,00105
4. PODSUMOWANIE
Przeprowadzone badania pozwoliły stwierdzić, że:• Wydłużanie czasu trwania impulsu w przebiegu napięcia zadanego regulatora napięcia generatora spo-
wodowało znaczne zmiany prądów fazowych twornika generatora, a tym samym zwiększenie amplitudy kołysań mocy chwilowej. Jednak im dłuższy jest czas trwania impulsu, tym większe są błędy obliczeń wartości własnych przeprowadzonych na podstawie przebiegów mocy chwilowej. Potrzebny jest od-powiedni kompromis. Można w przybliżeniu przyjąć, że dokładność obliczeń wartości własnych jest jeszcze zadowalająca, gdy czas trwania impulsu nie przekracza 300 ms.
• Wielokrotne obliczanie wartości własnych za pomocą algorytmu hybrydowego, przy różnych punktach startowych dobieranych za każdym razem losowo z zakresu poszukiwań, eliminuje problem utknięcia algorytmu w minimach lokalnych funkcji celu. Dokładność obliczeń jest zwiększana poprzez porówna-nie wartości własnych obliczanych z przebiegów mocy chwilowej różnych zespołów wytwórczych.
• Dwuetapowa estymacja zwiększa dokładność obliczeń wartości własnych. Algorytm optymalizacyjny działa sprawniej, gdy liczba parametrów optymalizacji jest mniejsza. Wartości własne, odpowiadające modom silniej tłumionym, mogą zostać odrzucone w pierwszym etapie estymacji, gdyż interweniują one w przebiegu mocy chwilowej tylko w krótkim czasie po wystąpieniu zakłócenia. W drugim etapie oblicza się wartości własne, odpowiadające modom silniej tłumionym.
• Wyniki obliczeń wartości własnych są dokładniejsze dla układu o mniejszym tłumieniu kołysań elektro-mechanicznych.
• Dokładność obliczeń wartości własnych dla mniej i bardziej rozbudowanych SEE jest porównywalna. Dla układu 4-maszynowego okazała się lepsza dla wartości własnych, odpowiadających słabo tłumionym, a dla 7-maszynowego dla wartości własnych, odpowiadających silnie tłumionym modom.
1. Paszek S., Nocoń A., The method for determining angular stability factors based on power waveforms, AT&P Journal Plus2, Power System Modeling and Control, Bratislava, Slovak Republic 2008, s. 71–74.
2. Paszek S., Pruski P., Porównanie przebiegów nieustalonych w nieliniowym i zlinearyzowanym modelu zespołu wytwór-czego pracującego w systemie elektroenergetycznym, Inter. Symp. on Electrical Machines, SME 2010, Gliwice – Ustroń, 2010, Proc. sum., s. 181–185.
3. Nocoń A., Paszek S., Polioptymalizacja regulatorów napięcia zespołów prądotwórczych z generatorami synchronicz-nymi, monografia, Wydawnictwo Politechniki Śląskiej, Gliwice 2008.
4. Paszek S., Pawłowski A., Optymalizacja parametrów dwuwejściowego stabilizatora systemowego PSS3B w jednoma-szynowym systemie elektroenergetycznym generator – sieć sztywna, Zeszyty Naukowe Politechniki Śląskiej nr 1633, seria „Elektryka”, Gliwice 2004, s. 115–124.
5. De Mello F., Hannett L. H., Representation of Saturation in Synchronous Machines. IEEE Transactions on Power Sys-tems, vol. PWRS-1, no. 4, 1986, s. 8–18.
6. IEEE Committee Report: Dynamic models for Steam and Hydro Turbines in Power System Studies, IEEE Transactions on Power Apparatus and Systems, vol. PAS-92, november (1973), no. 6, s. 1904–1915.
Stefan Paszek / Politechnika ŚląskaPiotr Pruski / Politechnika Śląska

53

54Marian Sobierajski, Wilhelm Rojewski / Politechnika WrocławskaSebastian Słabosz / Politechnika Wrocławska
Autorzy / Biografie
Marian SobierajskiWrocław / Polska
Profesor zwyczajny Politechniki Wrocławskiej. Zajmuje się problemami naukowymi związanymi z planowaniem i sterowaniem systemów elektro-energetycznych. Opublikował ok. 180 prac dotyczą-cych głównie probabilistycznych rozpływów mocy, stabilności napięciowej, stabilności lokalnej i jakości energii elektrycznej. Ostatnie prace związane są głównie z metodami szacowania bezpieczeństwa przesyłu mocy sieciami naj-wyższych napięć, modelowaniem i symulacjami komputerowymi stanów przejściowych w Matlabie oraz współpracą lokalnych elektrowni z systemem elektroenergetycznym.
Sebastian SłaboszWrocław / Polska
Absolwent Wydziału Elektrycznego Politechniki Wrocławskiej (2009), doktorant Wydziału Elek-trycznego Politechniki Wrocławskiej, Zakładu Sieci i Systemów Elektroenergetycznych w Instytucie Energoelektryki. Obszar zainteresowań naukowych: optymalizacja generacji rozproszonej w systemach elektroenergetycznych.
Wilhelm RojewskiWrocław / Polska
Absolwent Wydziału Elektrycznego Politechniki Wrocławskiej (1973). Uzyskał tytuł doktora nauk technicznych w Instytucie Energoelektryki macie-rzystej uczelni (1977), gdzie pracuje na stanowisku adiunkta. Zajmuje się elektroenergetyczną auto-matyką zabezpieczeniową, sterowaniem i regulacją w systemie elektroenergetycznym oraz warunkami współpracy rozproszonych źródeł energii i farm wiatrowych z systemem elektroenergetycznym.
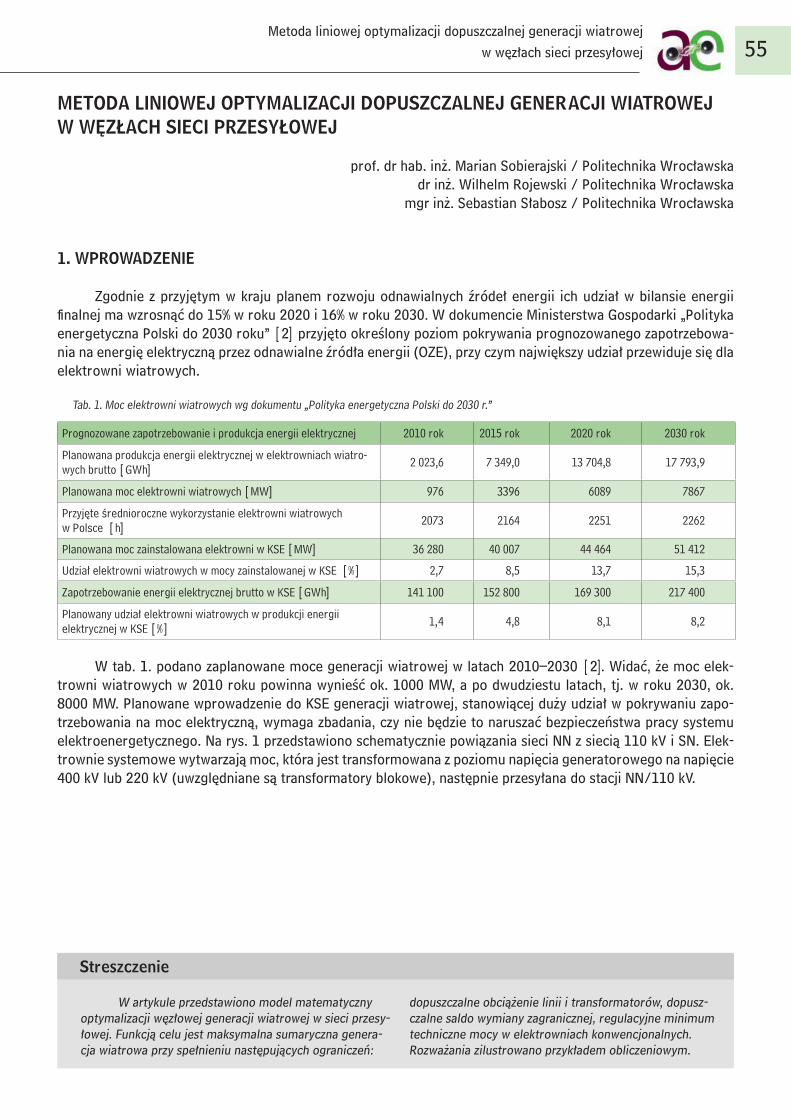
55
Streszczenie
W artykule przedstawiono model matematyczny optymalizacji węzłowej generacji wiatrowej w sieci przesy-łowej. Funkcją celu jest maksymalna sumaryczna genera-cja wiatrowa przy spełnieniu następujących ograniczeń:
dopuszczalne obciążenie linii i transformatorów, dopusz-czalne saldo wymiany zagranicznej, regulacyjne minimum techniczne mocy w elektrowniach konwencjonalnych. Rozważania zilustrowano przykładem obliczeniowym.
METODA LINIOWEJ OPTYMALIZACJI DOPUSZCZALNEJ GENERACJI WIATROWEJ W WĘZŁACH SIECI PRZESYŁOWEJ
prof. dr hab. inż. Marian Sobierajski / Politechnika Wrocławskadr inż. Wilhelm Rojewski / Politechnika Wrocławska
mgr inż. Sebastian Słabosz / Politechnika Wrocławska
1. WPROWADZENIE
Zgodnie z przyjętym w kraju planem rozwoju odnawialnych źródeł energii ich udział w bilansie energii finalnej ma wzrosnąć do 15% w roku 2020 i 16% w roku 2030. W dokumencie Ministerstwa Gospodarki „Polityka energetyczna Polski do 2030 roku” [2] przyjęto określony poziom pokrywania prognozowanego zapotrzebowa-nia na energię elektryczną przez odnawialne źródła energii (OZE), przy czym największy udział przewiduje się dla elektrowni wiatrowych.
Tab. 1. Moc elektrowni wiatrowych wg dokumentu „Polityka energetyczna Polski do 2030 r.”
Prognozowane zapotrzebowanie i produkcja energii elektrycznej 2010 rok 2015 rok 2020 rok 2030 rok
Planowana produkcja energii elektrycznej w elektrowniach wiatro-wych brutto [GWh]
2 023,6 7 349,0 13 704,8 17 793,9
Planowana moc elektrowni wiatrowych [MW] 976 3396 6089 7867
Przyjęte średnioroczne wykorzystanie elektrowni wiatrowych w Polsce [h]
2073 2164 2251 2262
Planowana moc zainstalowana elektrowni w KSE [MW] 36 280 40 007 44 464 51 412
Udział elektrowni wiatrowych w mocy zainstalowanej w KSE [%] 2,7 8,5 13,7 15,3
Zapotrzebowanie energii elektrycznej brutto w KSE [GWh] 141 100 152 800 169 300 217 400
Planowany udział elektrowni wiatrowych w produkcji energii elektrycznej w KSE [%]
1, 4 4,8 8,1 8,2
W tab. 1. podano zaplanowane moce generacji wiatrowej w latach 2010–2030 [2]. Widać, że moc elek-trowni wiatrowych w 2010 roku powinna wynieść ok. 1000 MW, a po dwudziestu latach, tj. w roku 2030, ok. 8000 MW. Planowane wprowadzenie do KSE generacji wiatrowej, stanowiącej duży udział w pokrywaniu zapo-trzebowania na moc elektryczną, wymaga zbadania, czy nie będzie to naruszać bezpieczeństwa pracy systemu elektroenergetycznego. Na rys. 1 przedstawiono schematycznie powiązania sieci NN z siecią 110 kV i SN. Elek-trownie systemowe wytwarzają moc, która jest transformowana z poziomu napięcia generatorowego na napięcie 400 kV lub 220 kV (uwzględniane są transformatory blokowe), następnie przesyłana do stacji NN/110 kV.
Metoda liniowej optymalizacji dopuszczalnej generacji wiatrowej w węzłach sieci przesyłowej
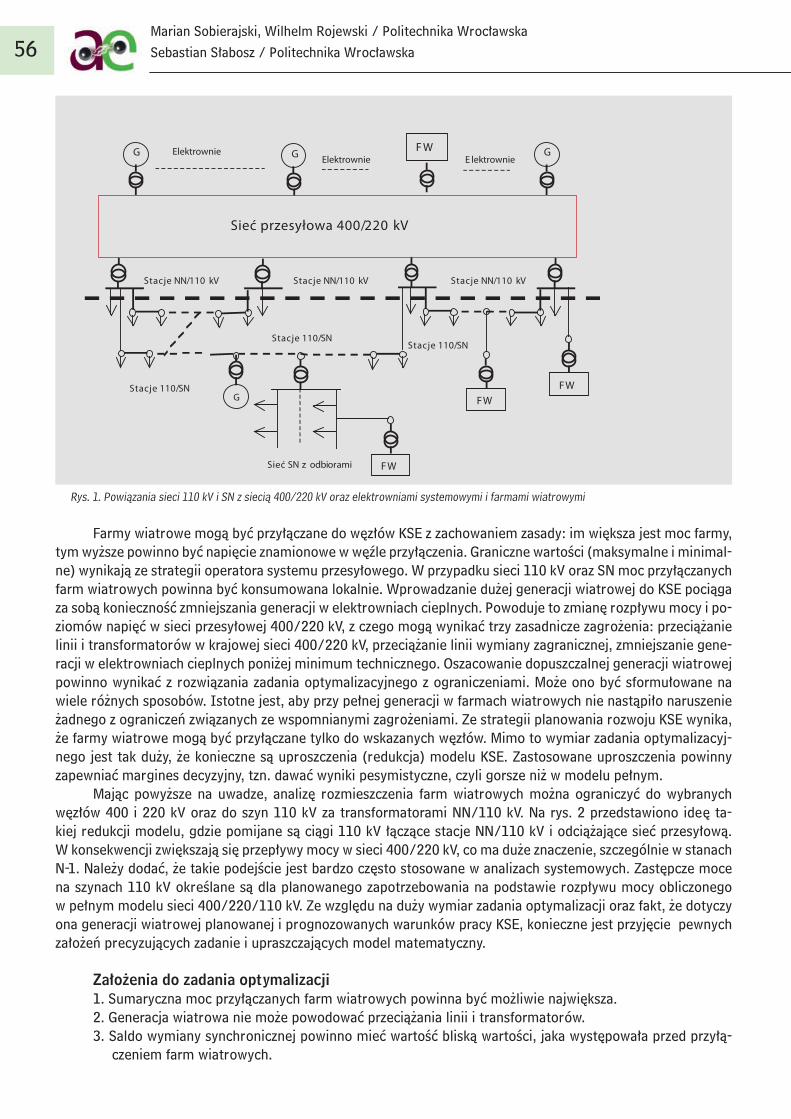
56
Rys. 1. Powiązania sieci 110 kV i SN z siecią 400/220 kV oraz elektrowniami systemowymi i farmami wiatrowymi
Farmy wiatrowe mogą być przyłączane do węzłów KSE z zachowaniem zasady: im większa jest moc farmy, tym wyższe powinno być napięcie znamionowe w węźle przyłączenia. Graniczne wartości (maksymalne i minimal-ne) wynikają ze strategii operatora systemu przesyłowego. W przypadku sieci 110 kV oraz SN moc przyłączanych farm wiatrowych powinna być konsumowana lokalnie. Wprowadzanie dużej generacji wiatrowej do KSE pociąga za sobą konieczność zmniejszania generacji w elektrowniach cieplnych. Powoduje to zmianę rozpływu mocy i po-ziomów napięć w sieci przesyłowej 400/220 kV, z czego mogą wynikać trzy zasadnicze zagrożenia: przeciążanie linii i transformatorów w krajowej sieci 400/220 kV, przeciążanie linii wymiany zagranicznej, zmniejszanie gene-racji w elektrowniach cieplnych poniżej minimum technicznego. Oszacowanie dopuszczalnej generacji wiatrowej powinno wynikać z rozwiązania zadania optymalizacyjnego z ograniczeniami. Może ono być sformułowane na wiele różnych sposobów. Istotne jest, aby przy pełnej generacji w farmach wiatrowych nie nastąpiło naruszenie żadnego z ograniczeń związanych ze wspomnianymi zagrożeniami. Ze strategii planowania rozwoju KSE wynika, że farmy wiatrowe mogą być przyłączane tylko do wskazanych węzłów. Mimo to wymiar zadania optymalizacyj-nego jest tak duży, że konieczne są uproszczenia (redukcja) modelu KSE. Zastosowane uproszczenia powinny zapewniać margines decyzyjny, tzn. dawać wyniki pesymistyczne, czyli gorsze niż w modelu pełnym.
Mając powyższe na uwadze, analizę rozmieszczenia farm wiatrowych można ograniczyć do wybranych węzłów 400 i 220 kV oraz do szyn 110 kV za transformatorami NN/110 kV. Na rys. 2 przedstawiono ideę ta-kiej redukcji modelu, gdzie pomijane są ciągi 110 kV łączące stacje NN/110 kV i odciążające sieć przesyłową. W konsekwencji zwiększają się przepływy mocy w sieci 400/220 kV, co ma duże znaczenie, szczególnie w stanach N-1. Należy dodać, że takie podejście jest bardzo często stosowane w analizach systemowych. Zastępcze moce na szynach 110 kV określane są dla planowanego zapotrzebowania na podstawie rozpływu mocy obliczonego w pełnym modelu sieci 400/220/110 kV. Ze względu na duży wymiar zadania optymalizacji oraz fakt, że dotyczy ona generacji wiatrowej planowanej i prognozowanych warunków pracy KSE, konieczne jest przyjęcie pewnych założeń precyzujących zadanie i upraszczających model matematyczny.
Założenia do zadania optymalizacji1. Sumaryczna moc przyłączanych farm wiatrowych powinna być możliwie największa.2. Generacja wiatrowa nie może powodować przeciążania linii i transformatorów.3. Saldo wymiany synchronicznej powinno mieć wartość bliską wartości, jaka występowała przed przyłą-
czeniem farm wiatrowych.
��
�� �� ��
����������������������� ��� �
�� �
�������������� ���
�� �
�� �
�������������� ��� �������������� ���
������������������������ � �����������
�������������
������������� �
������������� �
��������� ���������� �
�� �
Marian Sobierajski, Wilhelm Rojewski / Politechnika WrocławskaSebastian Słabosz / Politechnika Wrocławska

57
4. Przyłączana generacja wiatrowa nie może naruszać minimum technicznego systemu wynikającego z charakterystyki bloków wytwórczych i wymogów regulacji częstotliwości.
5. Moce farm wiatrowych przyłączanych do węzła o określonym napięciu znamionowym powinny zawierać się w przedziale zdefiniowanym przez operatora dla danego poziomu napięcia.
2. LINIOWY MODEL ROZPŁYWU MOCY CZYNNEJ W SIECI PRZESYŁOWEJ
Zagadnienia związane z szacowaniem dopuszczalnej mocy farm wiatrowych w sieci 400/220/110 kV moż-na sprowadzić do optymalizacji rozpływów mocy czynnych w uproszczonym modelu, zawierającym sieci 400/220 kV, transformatory NN/110 kV i zastępcze odbiory przyłączone do szyn 110 kV za tymi transformatorami. Sformułowanie zadania liniowej optymalizacji wymaga przyjęcia szczegółowych założeń upraszczających [3].
Założenia upraszczające do modelu liniowego1. W planowaniu rozpatrywane są stany ustalone o bezpiecznym zapasie stabilności, a więc o małych roz-
chyłach kątowych napięć na końcach poszczególnych gałęzi, co oznacza, że sin(δi − δj) ≈ (δi − δj) oraz cos(δi − δj) ≈ 1.
2. Spadki napięć w liniach i transformatorach są nieznaczne, co oznacza, że wartości napięć węzłowych w przybliżeniu równe są wartościom znamionowym Ui ≈ UN oraz Uj ≈ UN.
W analizowanym układzie elektrycznym należy wyróżnić węzeł odniesienia, który jednocześnie jest wę-złem bilansującym. Zazwyczaj przyjmuje się, że jest to węzeł o najwyższym numerze.
Przy przyjętych założeniach rozpływ mocy opisany jest liniowym równaniem macierzowym
P = Bδ lub δ = B-1 P = X P (1)
gdzie: P – wektor węzłowych mocy czynnych w niezależnych węzłach, B – macierz susceptancji węzło-wych, X – macierz reaktancji węzłowych, δ – wektor kątów napięć węzłowych.
W węźle sieci przesyłowej może wystąpić zarówno moc generowana, jak i odbierana. Moc węzłowa jest różnicą mocy generowanych i odbieranych w węzłach sieci, zatem
P = Pg – Pd (2)
gdzie: Pg – wektor mocy węzłowych generowanych, Pd – wektor mocy węzłowych odbieranych (zapotrze-bowanych).
Moce gałęziowe Pb mogą być obliczone bezpośrednio z mocy węzłowych
Pb = diag(b) Cδ = Cb XP = HP (3)
gdzie: H = Cb X – macierz transferowa mocy węzłowych, Cb = diag(b) C – admitancyjna macierz połączeń gałęziowo-węzłowych, C – zerojedynkowa macierz połączeń gałęziowo-węzłowych, b – wektor susceptancji ga-łęziowych.
3. ZADANIE LINIOWEJ OPTYMALIZACJI GENERACJI WIATROWEJ
Zadanie liniowej optymalizacji mocy farm wiatrowych, przyłączanych do węzłów sieci przesyłowej, może być sformułowane jako zadanie maksymalizacji sumarycznej mocy farm wiatrowych, przy spełnieniu ograniczeń równościowych i nierównościowych.
Metoda liniowej optymalizacji dopuszczalnej generacji wiatrowej w węzłach sieci przesyłowej

58
Tylko w części węzłów sieci występują elektrownie systemowe, podobnie farmy wiatrowe mogą być przy-łączone tylko do węzłów wskazanych przez operatora. Z tego powodu wektor mocy węzłowych należy podzielić na dwa podwektory
(4)
gdzie: Px – wektor mocy w węzłach z optymalizowanymi mocami generowanymi, Pgx – wektor optyma-lizowanych mocy generowanych, Pdx – wektor mocy odbieranych w węzłach z optymalizowanymi mocami ge-nerowanymi, Py – wektor mocy w węzłach bez optymalizowanych mocy generowanych, Pgy – wektor nieopty-malizowanych mocy generowanych, Pdy – wektor mocy odbieranych w węzłach bez optymalizowanych mocy generowanych.
W ogólności, wśród składowych wektora optymalizowanych mocy generowanych można wyróżnić składo-we odpowiadające nowym źródłom (FW – farmy wiatrowe) oraz składowe odpowiadające istniejącym konwen-cjonalnym źródłom (EC – systemowe elektrownie cieplne):
(5)
Składowym wektora optymalizowanych mocy w węzłach z nowymi źródłami (farmami wiatrowymi) przy-porządkowane są indeksy 1,...,nxFW, natomiast składowym z istniejącymi źródłami (elektrownie systemowe) – in-deksy nxFW + 1, ..., nx + nxEC. Między liczbą składowych i wymiarem zadania istnieje relacja nx = nxFW + nxEC.
Optymalizowane moce farm wiatrowych dotyczą zarówno istniejących farm w modelu KSE, jak i wszyst-kich innych możliwych do przyłączenia w węzłach wskazanych przez operatora. Dla farm istniejących przyjmuje się, że ich moc minimalna jest równa planowanej mocy podanej w modelu KSE, co oznacza, że zoptymalizowana moc istniejącej farmy wiatrowej może być tylko większa od zaplanowanej mocy farmy w modelu KSE.
Z kilku rozważanych wybrano funkcję celu zapewniającą maksymalizację sumy mocy farm wiatrowych we wskazanych węzłach sieci przesyłowej. Przyjętej funkcji celu nadano następującą postać:
(6)
gdzie: exFW = [1 1 ... 1] – transponowany wektor jedynek odpowiadających mocom przyłączanych farm wiatrowych, exEC = [0 0 ... 0] – transponowany wektor zer odpowiadających mocom elektrowni systemowych.
Wektor exFWEC = [exFW exEC ] zeruje moce elektrowni systemowych PgxEC, pozwalając pozostawić w zapisie pełny wymiar macierzy Pgx. Wektor mocy węzłowych PgxEC podlega optymalizacji, ponieważ występuje w ograni-czeniach nierównościowych zadania optymalizacji.
W zadaniu liniowej optymalizacji generacji wiatrowej ograniczenia równościowe zawsze są spełnione, gdyż zwiększenie sumy mocy węzłowych powoduje zmniejszenie mocy w węźle bilansującym i vice versa.
Minimum techniczne systemuMaksymalne i minimalne moce źródeł energii elektrycznej wynikają z technologii wytwarzania energii oraz
z ich udziału w regulacji częstotliwości:
Pgx ≤ Pgxmax oraz Pgx ≥ Pgxmin (7)
dygy
dxgx
y
x
PPPP
PP
P
gxEC
gxFWgx P
PP
gxTxFWEC
gxEC
gxFWTxEC
TxFW Pe
PP
ee
F
T
T
T TT
Marian Sobierajski, Wilhelm Rojewski / Politechnika WrocławskaSebastian Słabosz / Politechnika Wrocławska

59
dmax
dmaxg HPS
HPSP
HH
bgb dPD
x
xbx H
HD
gybybbx PDdd
y
yby H
HD
dmax
dmaxb HPS
HPSd
Metoda liniowej optymalizacji dopuszczalnej generacji wiatrowej w węzłach sieci przesyłowej
W przypadku elektrowni systemowych (EC) wartości minimalne, jak i maksymalne, wynikają głównie z udziału w regulacji częstotliwości. Dla farm wiatrowych (FW) dolna i górna granica mocy farmy określona jest arbitralnie przez operatora, w zależności od poziomu napięcia znamionowego w punkcie przyłączenia.
Dopuszczalne moce gałęzioweOgraniczenia nierównościowe wynikające z dopuszczalnych mocy gałęziowych są ograniczeniami funkcyj-
nymi i mogą być zapisane w postaci następującej nierówności macierzowej:
H(Pg – Pd) ≤ Smax lub HPg ≤ Smax + HPd (8)
Należy jednak wziąć pod uwagę fakt, że zmiana mocy generowanych może powodować zmianę kierunku przepływu mocy, czyli zmianę znaku mocy. Z tego powodu należy zapisać również nierówności dla zmienionych kierunków mocy gałęziowych:
– H(Pg – Pd) ≤ Smax lub – HPg ≤ Smax + HPd (9)
Nierówności uwzględniające zmiany kierunku mocy gałęziowych mogą być połączone w zapisie macierzo-wym:
lub (10)
gdzie:
HH
Db – uogólniona macierz transferowa mocy generowanych
dmax
dmaxb HPS
HPSd – wektor prawych stron ograniczeń nierównościowych.
Uwzględniając podział wektora mocy generowanych na dwa podwektory, mamy:
Dbx Pgx ≤ db – DbyPgy (11)
Ogólnie, mamy zatem:
Dbxx ≤ dbx (12)
gdzie:
, (12a)
, (12b)

60
Saldo synchronicznej wymiany mocySaldo synchronicznej wymiany zagranicznej, po wprowadzeniu nowych źródeł, powinno być bliskie lub
równe dopuszczalnemu saldu wymiany przed ich przyłączeniem, z zadaną dokładnością ±dPsaldo, np. ±5 MW. Podanie większego przedziału dokładności będzie skutkować w większości przypadków zwiększeniem eksportu, gdyż prowadzi do wzrostu wartości funkcji celu.
Psaldodop – Psaldowym ≤ dPsaldo lub Psaldodop – Psaldowym ≥ – dPsaldo (13)
Moce gałęziowe w liniach wymiany, po rozdzieleniu węzłów z optymalizowaną i nieoptymalizowaną gene-racją, wyraża równanie macierzowe:
Pbwym = Hxwym Pgx – Hxwym Pdx + Hywym Py (14)
Hxwym Pgx = Pbwym + Hxwym Pdx – Hywym Py (15)
gdzie: Hxwym – podmacierz transferowa mocy odpowiadająca gałęziom wymiany i węzłom z optymalizowa-nymi źródłami, Hywym – podmacierz transferowa mocy odpowiadająca gałęziom wymiany i węzłom bez optyma-lizowanej generacji.
Saldo synchronicznej wymiany mocy jest równe algebraicznej sumie mocy w liniach wymiany:
Psaldowym = ebwym Pbwym (16)
gdzie: ebwym = [1 1 ... 1] – transponowany wektor jedynek odpowiadający mocom synchronicznej wymiany.Po podstawieniu zależności na moce wymiany otrzymujemy:
Psaldowym = ebwym (Hxwym Pgx – Hxwym Pdx + Hywym Py) (17)
Różnica między dopuszczalnym a aktualnym saldem wymiany musi być mniejsza od zadanej dokładności:
Psaldodop – ebwym Hxwym Pgx – ebwym (– Hxwym Pdx + Hywym Py ) ≤ dPsaldo (17a)
– ebwym Hxwym Pgx ≤ – Psaldodop + ebwym (– Hxwym Pdx + Hywym Py ) + dPsaldo (17b)
oraz
Psaldodop – ebwym Hxwym Pgx – ebwym (– Hxwym Pdx + Hywym Py ) ≥ – dPsaldo (17c)
ebwym Hxwym Pgx ≤ Psaldodop – ebwym (– Hxwym Pdx + Hywym Py ) + dPsaldo (17d)
Nierówności uwzględniające górną i dolną dokładność salda mogą być połączone w zapisie macierzowym:
(18)
Ogólnie nierówności wynikające z salda wymiany mocy mają postać:
Dwym x ≤ dwym (19)
T
T
T
TT
T
T T
T T
)PHPH(e)PHPH(e
PHeHe
yywymdxxwymTbwym
yywymdxxwymTbwym
gxwym
Tbwym
xwymTbwym
saldodopsaldo
saldodopsaldox SdP
SdP
Marian Sobierajski, Wilhelm Rojewski / Politechnika WrocławskaSebastian Słabosz / Politechnika Wrocławska
T

61
gdzie:
(19a)
(19b)
Ograniczenia mocy w węźle bilansującymJeżeli linie wymiany połączone są z węzłem bilansującym, to ograniczenia salda wymiany są jednocześnie
ograniczeniami mocy w węźle bilansującym. W przeciwnym wypadku należy uwzględnić ograniczenia techniczne mocy w węźle bilansującym wyrażone za pomocą nierówności:
Pn ≤ Pnmax oraz Pn ≥ Pnmin (20)
Wartość mocy w węźle bilansującym wynika z wartości mocy w gałęziach łączących się z tym węzłem. W zapisie macierzowym mamy kolejno:
Pbn = Hxn Px + Hyn Py (20a)
Pbn = Hxn Pgx – Hxn Pdx + Hyn Py (20b)
Hx Pgx = Pbn + Hxn Pdx – Hyn Py (20c)
gdzie: Hxn – podmacierz transferowa mocy odpowiadająca gałęziom łączącym się z węzłem bilansującym oraz węzłom z optymalizowanymi generacjami, Hyn – podmacierz transferowa mocy odpowiadająca gałęziom łączącym się z węzłem bilansującym oraz węzłom bez optymalizowanej generacji.
Zgodnie z I prawem Kirchhoffa suma mocy w węźle jest równo zeru, co oznacza, że moc w węźle bilansu-jącym wynosi:
Pn = – ebn Pbn (21)
gdzie: ebn = [1 1 ..... 1] – transponowany wektor jedynek odpowiadający gałęziom łączącym się z węzłem bilansującym.
Po podstawieniu zależności na moc w węźle bilansującym otrzymujemy równanie macierzowe, uzależnia-jące wartość tej mocy od mocy węzłowych.
Pn = – ebn (Hxn Pgx – Hxn Pdx + HynPy ) (22)
W przypadku najmniejszej dopuszczalnej wartości mocy w węźle bilansującym mamy kolejno:
Pn min ≤ – ebn (Hxn Pgx – Hxn Pdx + HynPy ) (22a)
ebn Hxn Pgx ≤ – Pn min – ebn (– Hxn Pdx + HynPy ) (22b)
W przypadku największej dopuszczalnej wartości mocy w węźle bilansującym mamy kolejno:
– ebn Hxn Pgx ≤ Pn max + ebn (– Hxn Pdx + HynPy ) (22c)
xwymTbwym
xwymTbwym
wym HeHe
D
)(PdP)(PdP
saldowymsaldo
saldowymsaldo
yywymdxxwymTbwym
yywymdxxwymTbwym
wym PHPHePHPHe
d
T
T
T
T T
T T
Metoda liniowej optymalizacji dopuszczalnej generacji wiatrowej w węzłach sieci przesyłowej
T

62
Ogólnie nierówności wynikające z ograniczeń mocy w węźle bilansującym mają postać:
Dnx ≤ dn (23)
gdzie:
, (23a)
Ogólne zadania optymalizacjiW programie Matlab wymaga się, aby funkcja celu i wszystkie nierównościowe ograniczenia funkcyjne
były zapisane w postaci macierzowej.
min exWFEC x (24)
Przy spełnieniu ograniczeń:
Ax ≤ b (24a)
x ≤ xmax (24b)
– x ≤ – xmin (24c)
gdzie:
gxPx ,
nDDD
A wym
bx
,
nddd
b wym
bx
, minmin gxPx , maxmax gxPx (24d)
4. PRZYKŁAD OPTYMALIZACJI GENERACJI WIATROWEJ
W celu zilustrowania liniowej optymalizacji generacji wiatrowej w systemie elektroenergetycznym przepro-wadzono przykładowe obliczenia w 4-węzłowej sieci (rys. 2). Napięcie znamionowe sieci wynosi UN = 400 kV, a moc bazowa Sb = 100 MVA. W konsekwencji impedancja bazowa wynosi Zb = 1600 Ω. Rozważane jest przy-łączenie farm wiatrowych w węzłach 1 i 2. Mają one pokryć zapotrzebowanie mocy w węźle 3 o wartości 30 wyrażonej w jednostkach względnych, przy międzysystemowej wymianie synchronicznej równej –12,5. Dopusz-czalne moce gałęzi wynoszą: Samax = 15, Sbmax = 15, Scmax = 10, Sdmax = 15, Semax = 20. Przed optymalizacją wybrano arbitralnie moce farm wiatrowych równe P1 = 12, P2 = 3. W konsekwencji przekroczono dopuszczalne obciążenie gałęzi c (Pc = 12 > Scmax = 10) oraz wymianę synchroniczną (Pwym = –15 < Pwymdop = –12,5).
xnTbn
xnTbn
HeHe
Dn
)(P)(P
nnnmaxn
nnnminn
yydxxTb
yydxxTb
n PHPHePHPHe
d
T
Marian Sobierajski, Wilhelm Rojewski / Politechnika WrocławskaSebastian Słabosz / Politechnika Wrocławska

63
Rys. 2. Rozpływ mocy w przykładowej sieci przed i po optymalizacji generacji wiatrowej, w nawiasach umieszczono wartości po dokonaniu optymalizacji
Poszczególne macierze opisujące sieć przesyłową mają następującą postać:
0192,00038,00962,00192,00240,00048,00481,00096,00962,00192,0
jjjjj
zzzzz
e
d
c
b
a
branchz ,
50j1010j240j820j410j2
yyyyy
e
d
c
b
a
branchy ,
5010402010
bbbbb
e
d
c
b
a
branchb (25)
1001040103020402070
B
0172,00152,00141,00152,00545,00242,00141,00242,00293,0
1BX , ,
100001101011110
C ,
8586,07576,07071,01414,02424,02929,01212,03636,06061,00202,06061,01010,00202,03939,01010,0
)CXdiag(bH branch ,
30312
PPP
3
2
1
P ,
1501203
HPPb (26)
��
����
��
����
��
����
����
���
�����������������
��
������ ��������
��������
������ �������
����
�����������
�����
Metoda liniowej optymalizacji dopuszczalnej generacji wiatrowej w węzłach sieci przesyłowej

64
Rys. 3. Wyniki optymalizacji generacji wiatrowej w przykładowej sieci przesyłowej
Macierze związane z optymalizacją mają następującą postać:
30312
PPP
3
2
1
P ,
3
2
1
PPP
dygy
dxgx
y
x
PPPP
PP
P ,
(27)
2
1
PP
gxP ,
dxP
00 , 0y gP 30y dP
Optymalizacja została przeprowadzona w programie Matlab z wykorzystaniem funkcji linprog. Wyniki optymalizacji pokazano na rys. 3. Aby zlikwidować naruszenie ograniczeń, moce farm wiatrowych zostały rady-kalnie zmienione.
Residuals: Primal Dual Upper Duality Total Infeas Infeas Bounds Gap Rel A*x-b A’*y+z-w-f {x}+s-ub x’*z+s’*w Error ------------------------------------------------------------- Iter 0: 4.72e+002 8.66e+000 1.00e+002 4.20e+003 7.16e+000 Iter 1: 1.53e+001 7.54e-001 3.24e+000 4.89e+002 9.38e-001 Iter 2: 6.53e+000 2.23e-001 1.38e+000 1.71e+002 8.63e-001 Iter 3: 5.04e-001 1.78e-014 1.07e-001 1.66e+001 4.39e-001 Iter 4: 2.31e-014 1.34e-015 1.42e-014 9.12e-002 5.18e-003 Iter 5: 2.04e-010 3.63e-015 2.84e-014 4.41e-003 2.52e-004Optimization terminated.Fval0 = -15, Fval = -17.5, Pgxopt = [0.0000; 17.5000]Pgalopt = [7.5; 10; 10; 0; -12.5], Pwymopt = -12.5
�
� � �� �� �� �� �� � �� � ��� �� � ��� �� ���� �
��� �
��� �
��� �
��� �
��� �
��� �
��� �
� �
���
���
���
�� �
� �
� ��������
������ ������� �
�����������
��������
Marian Sobierajski, Wilhelm Rojewski / Politechnika WrocławskaSebastian Słabosz / Politechnika Wrocławska
65
BIBLIOGRAFIA
5. PODSUMOWANIEGeneracja wiatrowa powoduje zmiany rozpływów mocy, co może powodować przekroczenie dopuszczalnej
obciążalności linii i transformatorów, także dopuszczalnej mocy wymiany synchronicznej z innymi systemami. Ponadto wartość generacji wiatrowej nie może powodować zmniejszenia generacji konwencjonalnej poniżej do-puszczalnego minimum technicznego. Problem ten może być sformułowany i rozwiązany jako zadanie opty-malizacji liniowej. W pracy przedstawiono model matematyczny zadania. Rozważania zilustrowano przykładem obliczeniowym.
1. Kremens Z., Sobierajski M., Analiza systemów elektroenergetycznych, WNT, Warszawa 1996.2. Polityka energetyczna Polski do 2030 roku, wersja dostępna na stronie internetowej: http://www.mg.gov.pl/Gospo-
darka/Energetyka/Polityka+energetyczna.3. Sobierajski M., Słabosz S., Rojewski W., Optimal interconnecting wind generation into Polish power system, Modern
Electric Power Systems, MEPS ‘10, September, 20–22, 2010, Wrocław, Institute of Electrical Power Engineering. Wroclaw University of Technology.
Metoda liniowej optymalizacji dopuszczalnej generacji wiatrowej w węzłach sieci przesyłowej

66Paweł Wicher / Politechnika WrocławskaKazimierz Wilkosz / Politechnika Wrocławska
Autorzy / Biografie
Kazimierz WilkoszWrocław / Polska
Ukończył studia magisterskie, otrzymał stopień naukowy doktora, a następnie doktora habilitowa-nego nauk technicznych na Politechnice Wrocław-skiej. Po ukończeniu studiów doktoranckich w Instytucie Energoelektryki Politechniki Wrocław-skiej rozpoczął pracę w tym instytucie. Obecnie zajmuje stanowisko profesora nadzwyczajnego. Jest członkiem SEP, CIGRE, sekretarzem nauko-wym Sekcji Systemów Elektroenergetycznych Komitetu Elektrotechniki PAN. Jest członkiem komitetów naukowych wielu konferencji krajowych oraz zagranicznych. Pełni funkcje recenzenta prac zgłaszanych do czasopism (m.in. IEEE Transactions on Power Delivery, The International Journal for Computation and Mathematics in Electrical and Electronic Engineering) oraz na konferencje (m.in. PSCC, ICHQP, EPQU). Jego zainteresowania nauko-we oraz działalność dydaktyczna koncentrują się w zakresie analiz systemu elektroenergetycznego oraz zastosowań informatyki w elektroenergetyce.
Paweł WicherWrocław / Polska
Ukończył studia magisterskie na Wydziale Elek-trycznym Politechniki Wrocławskiej. Obecnie na tym samym wydziale jest studentem studiów dok-toranckich. Pracuje w Oddziale Wrocław Koncernu EnergiaPro, należącego do holdingu Tauron Polska Energia SA. Jego zainteresowania obejmują zabez-pieczenia elektroenergetyczne oraz inteligentne przetwarzanie danych pomiarowych z systemu elektroenergetycznego.
67
WYKORZYSTANIE ALGORYTMU TABU SEARCH DO LOKALIZACJI BATERII KONDENSATORÓW W SIECI ELEKTROENERGETYCZNEJ
mgr inż. Paweł Wicher / Politechnika Wrocławskaprof. dr hab. inż. Kazimierz Wilkosz / Politechnika Wrocławska
1. WPROWADZENIE
Jednym z problemów występujących w systemach elektroenergetycznych jest zagadnienie nadmiernych przepływów mocy biernej. Przepływy te są przyczyną zwiększonych strat mocy czynnej, zwiększonych różnic modułów napięcia w węzłach sieci elektroenergetycznej oraz zmniejszenia przepustowości sieci. Podejmowane są więc wysiłki w celu ograniczania nadmiernych przepływów mocy biernej. Cel ten można osiągnąć poprzez instalację baterii kondensatorów [1].
Proces znajdowania najkorzystniejszej lokalizacji baterii kondensatorów jest zadaniem optymalizacji kombinatorycznej. Należy do bardziej złożonych zadań. Należy zauważyć, że baterie kondensatorów są cha-rakteryzowane przez parametry, które są wielkościami dyskretnymi. Wielkości charakteryzujące stan systemu elektroenergetycznego (napięcia w węzłach sieci) są z kolei wielkościami ciągłymi. W celu rozwiązania oma-wianego zadania proponowane było zastosowanie metod programowania matematycznego [1]. Jednak wyniki zastosowania takiej koncepcji nie są zadowalające z punktu widzenia dokładności otrzymywanego rozwiązania oraz wielkości nakładów obliczeniowych. Interesującym sposobem rozwiązywania problemu lokalizacji baterii kondensatorów jest zastosowanie metaheurystyk. Wybrana metaheurystyka w procesie iteracyjnym prowadzi do rozwiązania znajdującego się w pobliżu ekstremum globalnego, a nie ekstremum lokalnego, co jest istotną różnicą w stosunku do postępowania na podstawie programowania matematycznego [4]. W pracy rozpatrywane jest wykorzystanie metaheurystyki, którą jest algorytm poszukiwania z tabu (Tabu Search, TS) [4].
Celem artykułu jest przedstawienie wyników analizy porównawczej metod lokalizacji baterii kondensa-torów z wykorzystaniem algorytmu TS. Na zakończenie pracy podsumowywane są najważniejsze własności roz-patrywanych metod.
2. OGÓLNY OPIS ALGORYTMU TS
Algorytm TS jest jednym z nowoczesnych heurystycznych algorytmów optymalizacji [5, 6]. Może być on wykorzystywany do rozwiązywania problemów optymalizacji kombinatorycznej. Jest to iteracyjny algorytm po-szukiwania rozwiązania. Należy do algorytmów samotnego poszukiwacza, wykorzystujących metodę lokalnych ulepszeń wyszukiwania. Stosowana jest w nim zasada osłabiania reguły selekcji. Polega ona na tym, że każde bieżące rozwiązanie jest zastępowane przez najlepsze rozwiązanie z jego sąsiedztwa, nawet jeśli spowoduje to pogorszenie wyniku rozwiązania.
Prawidłowe działanie algorytmu zależy od zdefiniowania następujących elementów: przejść (pomiędzy po-szczególnymi rozwiązaniami), listy tabu, kryterium aspiracji, kryterium stopu oraz w przypadku wyszukiwania optymalnej lokalizacji baterii kondensatorów zasady oceny tych lokalizacji.
Streszczenie
Artykuł traktuje o znajdowaniu najkorzystniejszej lokalizacji baterii kondensatorów w sieci elektroener-getycznej. Po ogólnym omówieniu rozwiązywania tego zadania autorzy skupili uwagę na wykorzystaniu algoryt-mu poszukiwania z tabu (Tabu Search). W dalszej części pracy znajdujemy zasady postępowania według algorytmu
poszukiwania z tabu. Po tym zaprezentowano charaktery-stykę różnych metod znajdowania optymalnej lokalizacji baterii kondensatorów, których wspólną cechą jest sto-sowanie algorytmu poszukiwania z tabu. Na zakończenie artykułu dokonano porównania przedstawionych metod lokalizacji baterii kondensatorów.
Wykorzystanie algorytmu tabu search do lokalizacji baterii kondensatorów w sieci elektroenergetycznej

68
a. PrzejściaPodstawą prawidłowego funkcjonowania algorytmu TS jest zdefiniowanie zestawu działań pozwalających
na generowanie przejść do nowych rozwiązań problemu, poprawiających rozważaną funkcję celu. W pewnych sytuacjach, gdy nie ma możliwości poprawienia funkcji celu, algorytm wybierze przejście, które w najmniejszym stopniu będzie pogarszało wartość tej funkcji.
b. Lista tabuLista tabu jest listą przejść, które są zabronione. Celem tworzenia listy tabu jest przeciwdziałanie pojawia-
niu się przejść cyklicznych oraz powrotom do lokalnego minimum, z którego wcześniej wykonywane było przej-ście. Tutaj przyjmujemy (dalej tak samo jest to zakładane, o ile nie będzie innego wskazania), że wspomniana wcześniej funkcja celu w poszukiwaniu z tabu jest minimalizowana.
Lista tabu odgrywa bardzo istotną rolę przy poszukiwaniu rozwiązania. Pozwala ona zmniejszyć przestrzeń poszukiwań, a co za tym idzie, skrócić czas obliczeń.
c. Kryterium aspiracjiKryterium aspiracji pozwala uchylić zakaz wykonania przejścia, wynikający z umieszczenia tego przejścia
na liście tabu. Często kryterium aspiracji jest tak formułowane, że uchylenie zakazu wykonania przejścia ma miejsce wtedy, gdy dane przejście prowadzi do zmniejszenia wartości funkcji celu, czyli f(Sk + tabu_move) < f(Sk
*), gdzie: f(·) jest funkcją celu, tabu_move jest przejściem do następnego rozwiązania, Sk
* jest najlepszym z do-tychczas osiągniętych rozwiązań, Sk
* jest rozwiązaniem, z którego przejście tabu_move prowadzi do kolejnego rozwiązania charakteryzowanego przez mniejszą wartość funkcji celu, niż to było dla rozwiązania Sk
*.Kryterium aspiracji pozwala zwiększyć elastyczność poszukiwania z tabu poprzez skierowanie poszukiwań
w kierunku bardziej atrakcyjnych przejść.
d. Kryterium stopuKryterium stopu, określające warunki, przy których poszukiwanie z tabu zostanie zakończone, często zakła-
da konieczność spełnienia przynajmniej jednego z warunków: 1. liczba iteracji od znalezienia najlepszego dotychczas rozwiązania przekracza ustaloną wartość2. liczba iteracji przekracza zakładaną maksymalną wartość.
3. CHARAKTERYSTYKA METOD LOKALIZACJI BATERII KONDENSATORÓW Z WYKORZYSTANIEM ALGORYTMU TS
3.1. Metoda Yanga, Huanga i HuangaMetoda Yanga, Huanga i Huanga [7] zakłada, że najkorzystniejsze lokalizacje baterii kondensatorów będą
znajdowane w trakcie minimalizacji funkcji:
KE_str + KI (1)
przy ograniczeniach:
g(X, Qz) = 0 (2)
Vi, min ≤ Vi ≤ Vi, max, 1 ≤ i ≤ n, 0 ≤ QBi, j ≤ QBi, max, 1 ≤ i ≤ nB, 1 ≤ j ≤ l, (3)
gdzie: KE_str jest kosztem strat energii w sieci elektroenergetycznej, KI jest kosztem instalacji bate-rii kondensatorów, g(∙) = 0 jest równaniem rozpływu mocy w sieci elektroenergetycznej, x jest wektorem na-pięć węzłowych, QZ jest wektorem mocy znamionowych dodatkowych źródeł mocy biernej, zainstalowanych w węzłach sieci elektroenergetycznej, Vi jest modułem napięcia w węźle i, n jest liczbą węzłów, Vi, min, Vi, max są mo-dułami napięcia Vi, odpowiednio minimalnym i maksymalnym, QBi, max, QBi, j są mocami znamionowymi i-tej bmerii
Paweł Wicher / Politechnika WrocławskaKazimierz Wilkosz / Politechnika Wrocławska

69
kondensatorów, odpowiednio, maksymalną oraz dla j-tego poziomu obciążenia, nB jest liczbą baterii kondensa-torów, l jest liczbą poziomów obciążenia.
Dodatkowymi źródłami mocy biernej rozpatrywanymi w metodzie są baterie kondensatorów. W procesie minimalizacji funkcji (1) wyznaczane są moce QBi, max, QBi, j.
W początkowym etapie procedury optymalizacyjnej, w celu określenia potencjalnych lokalizacji baterii kondensatorów, wykorzystywane są doświadczenia eksploatacyjne. W dalszej kolejności dla wskazanego wcze-śniej celu wykorzystywane są wyniki analizy czułościowej. Zasadnicza część procesu optymalizacyjnego jest re-alizowana z wykorzystaniem klasycznego algorytmu TS.
Obliczenia testowe metody wykonano na 69-węzłowym systemie testowym.
3.2. Metoda Gana, Qu i CaiMetoda Gana, Qu i Cai, opisana w literaturze[9], wykorzystuje funkcję celu (1), która jest minimalizowana
przy ograniczeniach (2), (3) oraz:
KTi min ≤ KTi ≤ KTi max, 1 ≤ i ≤ t, QGi min ≤ QGi ≤ QGi max, 1 ≤ i ≤ g, (4)
.0 ≤ QDi, j ≤ QDi, max, 1 ≤ i ≤ nD, 1 ≤ j ≤ l, (5)
gdzie: KTi, KTi min, KTi max są przekładniami transformatora i, odpowiednio, rzeczywiście występującą, mini-malną i maksymalną, t jest liczbą transformatorów, QGi, QGi min, QGi max są mocami biernymi dostarczanymi przez generator i, odpowiednio, rzeczywiście występującą, minimalną i maksymalną, g jest liczbą generatorów, QDi,max,
QDi,j są mocami znamionowymi i-tego dławika kompensującego, odpowiednio, maksymalną oraz dla j-tego po-ziomu obciążenia, nD jest liczbą dławików kompensujących.
W poszukiwaniu optymalnej lokalizacji oraz parametrów dodatkowych źródeł mocy biernej w systemie elektroenergetycznym metoda wykorzystuje algorytm TS. Dla takiej sytuacji w pracy [9] pokazany został sposób postępowania, gdy w zadaniu optymalizacyjnym oprócz wielkości dyskretnych są także wielkości ciągłe.
Jednym z czynników, od których zależy efektywność algorytmu TS, jest sprawna realizacja przejść do ko-lejnych rozwiązań. Autorzy przedstawili oryginalny sposób oceny rozwiązań z otoczenia aktualnego rozwiązania, który taką realizację przejść pomiędzy rozwiązaniami zapewnia.
Metoda była testowana z wykorzystaniem 200-węzłowego rzeczywistego systemu elektroenergetycznego. Testy uwidaczniają wyraźnie większą efektywność obliczeniową algorytmu TS w stosunku do symulowanego wyżarzania.
3.3. Metoda Moriego i OgityMetoda Moriego i Ogity, opisana w [10], wykorzystuje funkcję celu (1) oraz ograniczenia (2). W cha-
rakteryzowanej metodzie, w celu zwiększenia efektywności przeszukiwania z punktu widzenia zużywanego czasu oraz dokładności otrzymywanego wyniku, wykorzystywana jest koncepcja równoległych poszukiwań z tabu. Przy tym sposobie poszukiwania z tabu rozpatrywana jest dekompozycja sąsiedztwa rozwiązania. Pozwala to dekomponować poszukiwanie najlepszych rozwiązań do wyróżnionych obszarów sieci. Spośród tych rozwią-zań wybierane jest najlepsze. Takie postępowanie daje w efekcie redukcję czasu obliczeń. Zakłada się również zwielokrotnianie list tabu, co ma zapewnić zwiększenie różnorodności rozwiązań i efektywniejsze znajdowanie lepszych z nich. Zapewnia to także zwiększenie niezawodności poszukiwań. Wrażliwość poszukiwań na warunki początkowe ulega zdecydowanemu ograniczeniu.
Metoda była testowana z wykorzystaniem 27- i 69-węzłowego systemu rozdzielczego.
3. 4. Metoda Changa i LernaMetoda Changa i Lerna [11] bierze pod uwagę maksymalizację rozpatrywanej w niej funkcji celu:
max (ZΔP_str + ZΔE_str – K1) (6)qi
Wykorzystanie algorytmu tabu search do lokalizacji baterii kondensatorów w sieci elektroenergetycznej

70
gdzie: Z∆P_str, Z∆E_str są zyskami wynikającymi, odpowiednio, z ograniczenia szczytowych strat mocy oraz strat energii w sieci elektroenergetycznej.
Optymalna lokalizacja i parametry baterii kondensatorów są wyznaczane dla każdego wyróżnianego pozio-mu obciążenia sieci elektroenergetycznej.
Do znajdowania optymalnej lokalizacji i parametrów baterii kondensatorów wykorzystywane jest poszu-kiwanie z tabu. Stosowana procedura składa się z trzech etapów. Każdy z nich obejmuje wiele iteracji, w czasie których znajdowane są kolejne rozwiązania problemu lokalizacji baterii kondensatorów. Wyróżnienie trzech eta-pów postępowania ma na celu takie ograniczenie znajdowanego w każdym z nich optymalnego rozwiązania, by sumaryczna pojemność branych pod uwagę baterii kondensatorów nie przekraczała pewnej ustalonej wartości. Wartość ta jest różna dla poszczególnych etapów. Jest ona ustalana losowo, podobnie jak liczba baterii konden-satorów rozważanych w rozwiązaniu wstępnym.
Metoda była testowana z wykorzystaniem 34-węzłowego systemu rozdzielczego.
3.5. Metoda Gallega, Monticellego i RomeraMetoda Gallega, Monticellego i Romera [12] jest metodą hybrydową, która wykorzystuje koncepcję
poszukiwania z tabu, jednocześnie uwzględniając pewne idee podejść kombinatorycznych zaprezentowanych w algorytmach genetycznych, symulowanym wyżarzaniu oraz praktycznych podejściach heurystycznych (analiza czułościowa).
Minimalizowaną funkcją celu jest funkcja (1). Zadanie znajdowania najlepszych lokalizacji baterii konden-satorów rozwiązywane jest przy ograniczeniach (2), (3).
W istocie metoda wyróżnia dwie fazy: fazę heurystycznego wyszukiwania lokalizacji baterii kondensato-rów oraz fazę poszukiwania z tabu. Efektem pierwszej fazy jest wyszukanie nie jednej, a wielu (niekoniecznie optymalnych) lokalizacji baterii kondensatorów, które stanowią punkt wyjścia do dalszych poszukiwań najlep-szych lokalizacji. W tej fazie lokalizacje baterii kondensatorów są wskazywane w wyniku zastosowania analizy czułościowej. W pracy [12] wykorzystywane są różne parametry czułościowe i w efekcie otrzymywane są różne lokalizacje baterii kondensatorów.
W fazie drugiej przeprowadzane jest poszukiwanie z tabu. Jeżeli wszystkie dotychczas wskazane lokaliza-cje zostały już uwzględnione, generowane są nowe lokalizacje z wykorzystaniem: rekombinacji, strategii Path Relinking i konfiguracji elitarnych.
Autorzy przewidują znajdowanie lokalizacji baterii kondensatorów dla różnych obciążeń sieci, w szczegól-ności dla obciążenia szczytowego.
Metoda była testowana z wykorzystaniem spotykanych w literaturze systemów testowych posiadających 9 oraz 69 węzłów i 135-węzłowego systemu rzeczywistego.
3.6. Metoda Zhanga, Liu i LiuMetoda Zhanga, Liu i Liu jest opisana w pracy [13]. Metoda przewiduje możliwość poszukiwania nie
tylko optymalnej lokalizacji źródeł energii biernej pojemnościowej (baterii kondensatorów), ale także źródeł energii biernej indukcyjnej (dławików kompensujących). W poszukiwaniu optymalnej lokalizacji źródeł ener-gii biernej, wykorzystując wiedzę inżynierską, wyróżnia się obciążenia duże, średnie i małe. Stwierdza się, że przy dużym obciążeniu zachodzi potrzeba dostarczenia do sieci energii biernej pojemnościowej, przy małym – energii biernej indukcyjnej [13]. W przypadku obciążeń dużych zakładane jest wykorzystanie funkcji celu (1) minimalizowanej przy ograniczeniach (2)–(5) oraz ograniczeniu SLi ≤ SLi max, 1 ≤ i ≤ m, gdzie: SLi, SLi max są moca-mi pozornymi dla linii elektroenergetycznej i, odpowiednio, rzeczywiście występującej i maksymalnej, m jest liczbą linii elektroenergetycznych. Składnik KI w funkcji celu reprezentuje koszty związane z zainstalowaniem baterii kondensatorów. Dla małych obciążeń składnik KI w funkcji celu reprezentuje koszty związane z zainsta-lowaniem dławików kompensujących. Dla obciążeń średnich składnik KI nie występuje.
Dla dużych obciążeń zamiast warunku 0 ≤ QBi, j ≤ QBi max, 1 ≤ i ≤ nB, 1 ≤ j ≤ l brany jest pod uwagę wa-runek 0 ≤ QBi, 1 ≤ i ≤ nB, a dla małych obciążeń, oprócz warunku 0 ≤ QBi, j ≤ QBi, max, 1 ≤ i ≤ nB, 1 ≤ j ≤ l, także warunek 0 ≤ QDi, 1 ≤ i ≤ nD.
Każdy z wyróżnianych przypadków obciążenia rozpatrywany jest osobno. Przy znajdowaniu optymalnych lokalizacji źródeł mocy biernej wykorzystywany jest zmodyfikowany algo-
rytm TS. Wstępne rozwiązania ustalane są na podstawie doświadczeń eksploatacyjnych i analizy czułościowej.
Paweł Wicher / Politechnika WrocławskaKazimierz Wilkosz / Politechnika Wrocławska

71
Do testowania metody był wykorzystany 137-węzłowy rzeczywisty (chiński) system elektroenergetyczny. Bardzo podobna metoda do metody Zhanga, Liu i Liu jest opisana w [14]. W pracy tej stwierdzono,
że w porównaniu ze zwykłym algorytmem zmodyfikowany algorytm TS (modyfikacja wstępnych rozwiązań w oparciu o doświadczenia eksploatacyjne i analizę czułościową) pozwala w krótszym czasie otrzymać mniejszą wartość funkcji celu.
3.7. Metoda Piresa, Martinsa i AntunesaMetoda Piresa, Mar�nsa i Antunesa [15] opracowana została w celu rozwiązania zadania optymalizacji wie-
lokryterialnej liczby, lokalizacji, parametrów oraz chwil czasu, w których następują przełączenia baterii konden-satorów w sieci rozdzielczej. W metodzie rozpatrywane są dwie funkcje celu, a mianowicie straty mocy czynnej (PΣ str) oraz koszty wprowadzenia do sieci baterii kondensatorów (KI,B). Uwzględniane są ograniczenia: (2), (3) oraz ograniczenie, by co najwyżej tylko jedna bateria kondensatorów była instalowana w jednym węźle.
W metodzie wykorzystywany jest algorytm TS. Wstępne rozwiązanie ustalane jest drogą losowania. W wyniku poszukiwania z tabu znajdowany jest niewielki obszar rozwiązań niedominujących. Wybór ostateczne-go rozwiązania pozostawia się przeprowadzającemu obliczenia.
Metoda była testowana z wykorzystaniem 94-węzłowego rzeczywistego (portugalskiego) systemu roz-dzielczego.
3.8. Metoda Moriego i TsunokawyMetoda Moriego i Tsunokawy [16] wykorzystuje funkcję celu (1) oraz uwzględnia ograniczenia (2), (3).
Łączy poszukiwania z tabu z przeszukiwaniem zmiennego sąsiedztwa. Przeszukiwanie zmiennego sąsiedztwa po-zwala na większe zróżnicowanie potencjalnych rozwiązań i przez to uzyskanie lepszych efektów końcowych. Metoda zapewnia bardziej efektywne poszukiwanie rozwiązania globalnego niż inne metody.
Metoda była testowana z wykorzystaniem 32-węzłowego systemu rozdzielczego. Zauważono, że odchy-lenie standardowe funkcji celu jest w przypadku opisywanej metody o 25% mniejsze niż w przypadku metody, w której nie ma przeszukiwania zmiennego sąsiedztwa.
3.9. PodsumowanieZestawienie charakterystycznych cech rozpatrywanych metod podane jest w tab. 1.
Tab. 1. Zestawienie charakterystycznych cech rozpatrywanych metod
Metoda Funkcja celu Wstępne ustalenie rozwiązania Obszar przejść Prace Rok opubl.
Yanga, Huanga i Huanga KE_str+KIBdoświadczenia eksploatacyjne,analiza czułościowa
sąsiedztwo7, 8
1995, 1996
Gana, Qu i Cai KE_str+KIB +KID losowanie sąsiedztwo 9 1996
Moriego i Ogity KE_str+KIB losowanie zdekomponowane sąsiedztwo 10 (1999) 2000
Changa i Lerna Z∆P_str+ Z∆E_str– KIB losowanie sąsiedztwo 11 2000
Gallega, Monticellego i Romera KE_str+KIB analiza czułościowa dokładnie zdefiniowany 12 2001
Zhanga, Liu i Liu KE_str+KIB +KIDdoświadczenia eksploatacyjne,analiza czułościowa
sąsiedztwo 132002 (2010)
Piresa, Martinsa i Antunesa PΣ str, KIB losowanie sąsiedztwo 15 2005
Moriego i Tsunokawy KE_str+KIB nie ma baterii kondensatorów zmienne sąsiedztwo 16 2005
Omówione w pracy metody powstały stosunkowo niedawno. W większości z analizowanych metod wy-korzystywana jest funkcja celu, która stanowi sumę kosztów strat energii oraz kosztów związanych z instalacją baterii kondensatorów w sieci elektroenergetycznej. Istotne różnice pomiędzy rozpatrywanymi metodami wy-stępują w zakresie wstępnego ustalenia rozwiązania oraz definicji obszaru przejść pomiędzy poszczególnymirozwiązaniami. W trzech metodach, tj. w metodzie Yanga, Huanga i Huanga, metodzie Gallega, Monticellego
Wykorzystanie algorytmu tabu search do lokalizacji baterii kondensatorów w sieci elektroenergetycznej

72
i Romera oraz metodzie Zhanga, Liu i Liu, przy ustalaniu wstępnego rozwiązania wykorzystywane są wyniki ana-lizy czułościowej. W dwóch metodach korzysta się z doświadczenia eksploatacyjnego, w jednej metodzie zakłada się, że punktem wyjściowym do analiz jest brak baterii kondensatorów w sieci. W pozostałych metodach na drodze losowania ustala się rozwiązanie początkowe.
Na definicję obszaru przejść pomiędzy poszczególnymi rozwiązaniami zwraca szczególną uwagę kilka me-tod. W metodzie Moriego i Ogity dokonywana jest dekompozycja sąsiedztwa otoczenia aktualnego rozwiąza-nia. W jednej z późniejszych metod, tj. w metodzie Gallega, Monticellego i Romera, obszar przejść pomiędzy poszczególnymi rozwiązaniami jest początkowo definiowany na podstawie analizy czułościowej, a następniez wykorzystaniem: rekombinacji, strategii Path Relinking i konfiguracji elitarnych. Inne podejście do ustalaniarozpatrywanego obszaru przejść można znaleźć w metodzie Moriego i Tsunokawy. W otoczeniu aktualnego roz-wiązania wyznaczane są dwa obszary przejść. Gdy w jednym z nich nie zostanie znalezione rozwiązanie lepsze od dotychczasowego, to kontynuowane jest poszukiwanie kolejnego rozwiązania w drugim z obszarów.
4. UWAGI KOŃCOWE
Zainteresowanie wykorzystaniem algorytmu TS do optymalizacji lokalizacji baterii kondensatorów wiąże się z dążeniem do znalezienia możliwie najkorzystniejszej metody co do dokładności wyników oraz czasu obli-czeń. Zadanie wspomnianej optymalizacji nie należy do wyzwań prostych. Należy bowiem znaleźć ekstremum pewnej funkcji w obszarze dyskretnej przestrzeni wielowymiarowej, obejmującym wiele dopuszczalnych punk-tów. Ogólnie biorąc, wspomniana funkcja ma wiele ekstremów. Algorytm TS zapewnia mechanizm dający możli-wość znalezienia ekstremum globalnego w relatywnie krótkim czasie.
Należy zauważyć, że podejście heurystyczne, które ma także miejsce, gdy stosowany jest algorytm TS, pozwala lepiej uwzględnić rzeczywiste warunki. Często metody analityczne opierają się na nierealistycznych za-łożeniach, takich jak na przykład: równomierny rozkład obciążenia, stałość obciążeń, podczas gdy w przypadku podejścia heurystycznego nie ma potrzeby ich stosowania.
Algorytm TS jest jedną z bardziej efektywnych metaheurystyk. Ma on charakter deterministyczny. Jest on prostszy niż inne algorytmy poszukiwania rozwiązania w określonej przestrzeni. Jego zalety są istotne z punktu widzenia optymalizacji kombinatorycznej, która występuje przy poszukiwaniu najlepszej w sensie przyjętego kryterium lokalizacji źródeł mocy biernej. Stwierdzono [17], że efekty wykorzystania zwykłego algorytmu TS do znajdowania optymalnej lokalizacji baterii kondensatorów – bez uwzględniania czasu obliczeń – są porówny-walne z efektami otrzymywanymi z wykorzystaniem algorytmu genetycznego bądź symulowanego wyżarzania. Zauważa się jednak [10], że zarówno algorytmy genetyczne, jak i symulowane wyżarzanie są mniej korzyst-ne z punktu widzenia dokładności uzyskiwanych wyników oraz czasu obliczeń w porównaniu z algorytmem TS, o ile dekomponowane jest otoczenie aktualnego rozwiązania. Szczególnie wniosek ten dotyczy większych sieci elektroenergetycznych. W pracy [18] stosuje się łącznie zwykły algorytm TS oraz algorytm genetyczny. Okazuje się, że otrzymane w takim przypadku wyniki są lepsze niż wtedy, gdy stosowany jest tylko algorytm TS.
W wielu przypadkach, przy opracowywaniu metody optymalizacji lokalizacji źródeł mocy biernej z wyko-rzystaniem algorytmu TS, zwraca się uwagę na wstępne ustalenie rozwiązania zadania oraz odpowiednie okre-ślenie obszaru przejść pomiędzy poszczególnymi rozwiązaniami. W publikacjach podkreślany jest istotny wpływ tych czynników na wyniki postępowania optymalizacyjnego.
Paweł Wicher / Politechnika WrocławskaKazimierz Wilkosz / Politechnika Wrocławska

73
BIBLIOGRAFIA
1. Ng H.N., Salama M.M.A., Chikhani A.Y., Classification of Capacitor Allocation Techniques. IEEE Trans. on PD, 2000, vol. 15, no. 1, s. 387–392.
2. Zhang W., Tolbert L.M., Survey of Reactive Power Planning Methods. IEEE PES General Meeting, 2005, s. 1430––1440.
3. Zhang W., Fangxing L., Tolbert L.M., Review of Reactive Power Planning: Objectives, Constraints, and Algorithms. IEEE Trans. on PS, 2007, vol. 22, no. 4, s. 2177–2186.
4. Glover F., Future Paths for Integer Programming and Links to Artificial Intelligence. Computation & Operations Research, 1986, vol. 13, no. 5, s. 533–549.
5. Glover F., Tabu Search – Part I, ORSA J. on Computing, 1989, vol. 1, no. 3, s. 190–206.6. Glover F., Tabu Search – Part II, ORSA J. on Computing, 1990, vol. 2, no. 1, s. 4–32.7. Yang H.-T., Huang Y.-Ch., Huang Ch.-L., Solution to Capacitor Placement Problem in a Radial Distribution System Using
Tabu Search Method. Inter. Conf. on Energy Management and Power Delivery, 1995, vol. 1, s. 388–393. 8. Huang Y.-Ch., Yang H.-T., Huang Ch.-L., Solving the Capacitor Placement Problem in a Radial Distribution System Using
Tabu Search Approach. IEEE Trans. on PS, 1996, vol. 11, no. 4, s. 1868–1873.9. Gan D., Qu Z., Cai H., Large Scale Var Optimization and Planning by Tabu Search. Electric Power Systems Research,
1996, vol. 39, no. 3, s. 195–204.10. Mori H., Ogita Y., Parallel Tabu Search for Capacitor Placement in Radial Distribution Systems. IEEE PES Winter
Meeting, 2000, vol. 4, s. 2334–2339.11. Chang C.S., Lern L.P., Application of Tabu Search Strategy in Solving Non-Differentiable Savings Function for the
Calculation of Optimum Savings due to Shunt Capacitor Installation in a Radial Distribution System. IEEE PES Winter Me-eting, 2000, vol. 4, s. 2323–2338.
12. Gallego R.A., Monticelli A.J., Romero R., Optimal Capacitor Placement in Radial Distribution Networks. IEEE Trans. on PS, 2001, vol. 16, no. 4, s. 630–637.
13. Zhang W., Liu Y., Liu Y., Optimal Var Planning in Area Power System. Inter. Conf. on Power System Technology, 2002, vol. 4, s. 2072–2075.
14. Zou Y., Optimal Reactive Power Planning Based on Improved Tabu Search Algorithm. Inter. Conf. on Electrical and Control Engg, 2010, Wuhan, s. 3945–3948.
15. Pires D.F., Martins A.G., Antunes C.H., A Multiobjective Model for Var Planning in Radial Distribution Networks Based on Tabu Search. IEEE Trans. on PS, 2005, vol. 20, no. 2, s. 1089–1094.
16. Mori H., Tsunokawa S., Variable Neighborhood Tabu Search for Capacitor Placement in Distribution Systems. IEEE Inter. Symp. on Circuits and Systems, 2005, s. 4747–4750.
17. Al-Mohammed A.H., Elamin I., Capacitor Placement in Distribution Systems Using Artificial Intelligent Techniques. IEEE PowerTech, 2003, Bologna, Italy, vol. 4, s. 1–7.
18. Nikoukar J., Gandomkar M., Capacitor Placement in Distribution Systems Using Genetic Algorithms and Tabu Se-arch. The 4th WSEAS Inter. Conf. on Applications of Electrical Engineering, 2005, Prague, Czech Republic, s. 354–358.
Wykorzystanie algorytmu tabu search do lokalizacji baterii kondensatorów w sieci elektroenergetycznej

74Józef Wiśniewski / Politechnika Łódzka
Autorzy / Biografie
Józef WiśniewskiŁódź / Polska
Ukończył Politechnikę Łódzką (1973). Stopień doktora nauk technicznych otrzymał na Wydziale Elektrycznym Politechniki Łódzkiej w dziedzinie elektroenergetyki. Obecnie jest adiunktem w Instytucie Elektroenergetyki swojej macierzystej uczelni. Zajmuje się zagadnieniami modelowania i symulacji stanów nieustalonych w systemach elektroenergetycznych oraz zabezpieczeniami elek-troenergetycznymi. Jest członkiem Stowarzyszenia Elektryków Polskich.
75
WPŁYW ZAKŁÓCEŃ W SIECI ELEKTROENERGETYCZNEJ NA MOMENTY SKRĘTNE W WALE TURBOZESPOŁU DUŻEJ MOCY
dr inż. Józef Wiśniewski / Politechnika Łódzka
Przedstawione w artykule wyniki zostały uzyskane w badaniach współfinansowanych przez Narodowe Cen-trum Badań i Rozwoju w ramach umowy SP/E/1/67484/10 – Strategiczny Program Badawczy – Zaawansowa-ne technologie pozyskiwania energii: Opracowanie technologii dla wysokosprawnych „zero-emisyjnych” bloków węglowych, zintegrowanych z wychwytem CO2 ze spalin.
1. WSTĘP
Planuje się w nieodległej przyszłości wprowadzenie do KSE bloków o mocy ok. 1000 MW, pracujących przy parametrach nadkrytycznych średniotemperaturowych o parametrach pary: temperatura 560÷580ºC, ciśnienie 25,8 MPa. Przejście z tradycyjnych parametrów 535ºC, 18 MPa prowadzi do wzrostu sprawności wytwarzania energii elektrycznej o ok. 1,5÷1,7 punktu procentowego. Bliskim celem wydaje się być osiągnięcie sprawności bloku na poziomie 50% (program 50+). Nowe konstrukcje bloków rodzą nowe problemy z zakresu współpracy bloku z systemem elektroenergetycznym [1].
W artykule przedstawiono zagadnienie modelowania wirującego układu mas turbin i generatora. Celem tego modelowania jest obliczenie momentów skrętnych w wałach łączących poszczególne elementy układu pod-czas zakłóceń występujących w sieci elektroenergetycznej. Obliczenia wykonywano przy użyciu programu EMTP/ATP [2].
Elementy turbozespołu połączone są wałami o określonej wytrzymałości mechanicznej, która może zostać przekroczona podczas niektórych awarii.
Układ wirujący turbozespołu charakteryzują częstotliwości drgań własnych. Obliczenie tych częstotliwości oraz niedopuszczenie do pracy układu przy ich występowaniu jest ważnym warunkiem prawidłowej eksploatacji turbozespołu.
W artykule przedstawiono model mechanicznego układu wirującego turbozespołu 1000 MW oraz wyniki obliczeń modalnych częstotliwości drgań własnych jego elementów. Rozważono przypadki zakłóceń w sieci elek-troenergetycznej, powodujące zwiększone momenty skrętne wału. Są to zwarcia symetryczne i niesymetryczne w sieci, działanie automatyki 1-fazowego SPZ, nieprawidłowo przeprowadzona synchronizacja oraz oddziaływa-nie harmonicznych sieciowych w prądzie generatora na wirnik mogące wywołać wystąpienie drgań rezonanso-wych.
Zagrożenie wytrzymałości wału zależy nie tylko od wartości momentu skrętnego, pojawiającego się pod-czas awarii, ale także od liczby i częstotliwości oscylacji, a także od historii przeciążeń wału. W celu uproszczenia przyjęto w artykule wartość amplitudy momentu skrętnego w wale 3 p.u. jako graniczną, dopuszczalną, krótko-trwałą w warunkach zakłócenia.
Wpływ zakłóceń w sieci elektroenergetycznej na momenty skrętne w wale turbozespołu dużej mocy
Streszczenie
Ustalono parametry mechaniczne zespołu turbin i generatora mocy 1000 MW bloku referencyjnego, pra-cującego przy parametrach nadkrytycznych. Przy użyciu metody modalnej obliczono częstotliwości drgań własnych układu wirującego. Zbadano wartości momentów skręt-
nych, jakie mogą się pojawić w odcinkach wałów podczas zakłóceń w sieci elektroenergetycznej, takich jak bliskie zwarcia, działanie automatyki SPZ, synchronizacja lub oddziaływanie od strony sieci momentów elektromagne-tycznych wprowadzających układ w drgania rezonansowe.
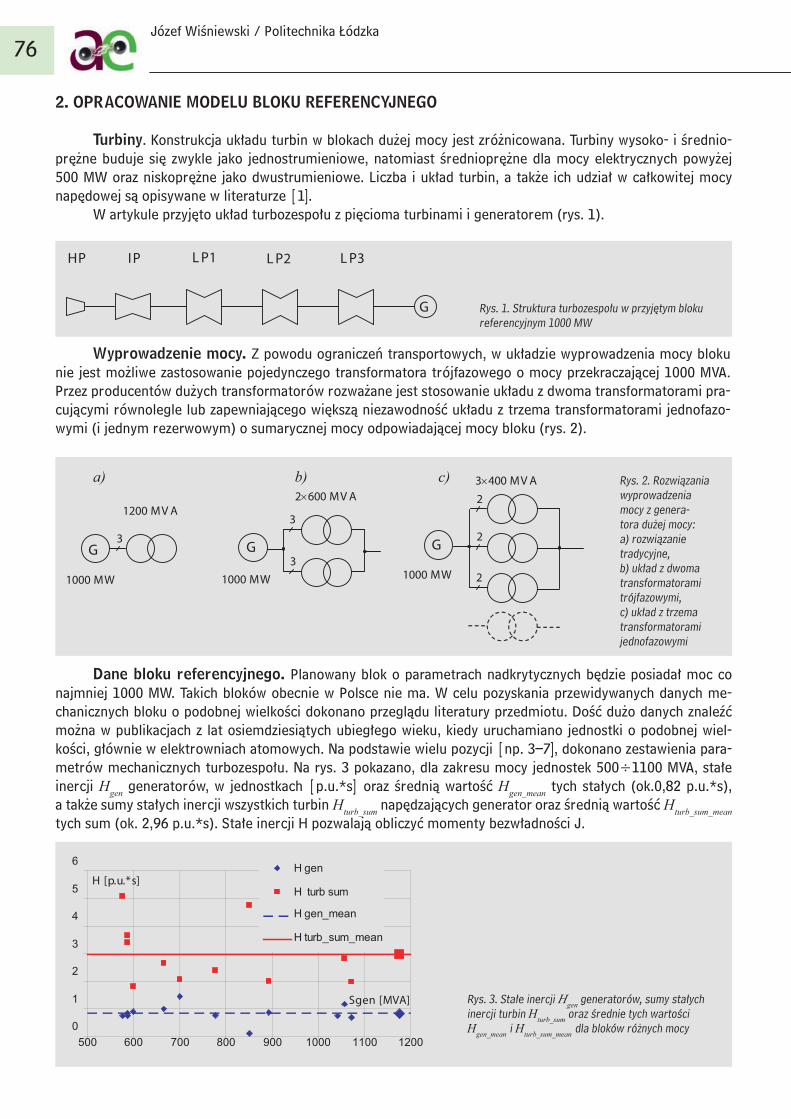
76
2. OPRACOWANIE MODELU BLOKU REFERENCYJNEGO
Turbiny. Konstrukcja układu turbin w blokach dużej mocy jest zróżnicowana. Turbiny wysoko- i średnio-prężne buduje się zwykle jako jednostrumieniowe, natomiast średnioprężne dla mocy elektrycznych powyżej 500 MW oraz niskoprężne jako dwustrumieniowe. Liczba i układ turbin, a także ich udział w całkowitej mocy napędowej są opisywane w literaturze [1].
W artykule przyjęto układ turbozespołu z pięcioma turbinami i generatorem (rys. 1).
Wyprowadzenie mocy. Z powodu ograniczeń transportowych, w układzie wyprowadzenia mocy bloku nie jest możliwe zastosowanie pojedynczego transformatora trójfazowego o mocy przekraczającej 1000 MVA. Przez producentów dużych transformatorów rozważane jest stosowanie układu z dwoma transformatorami pra-cującymi równolegle lub zapewniającego większą niezawodność układu z trzema transformatorami jednofazo-wymi (i jednym rezerwowym) o sumarycznej mocy odpowiadającej mocy bloku (rys. 2).
�
��
��� ��� ���� ���� ����
Dane bloku referencyjnego. Planowany blok o parametrach nadkrytycznych będzie posiadał moc co najmniej 1000 MW. Takich bloków obecnie w Polsce nie ma. W celu pozyskania przewidywanych danych me-chanicznych bloku o podobnej wielkości dokonano przeglądu literatury przedmiotu. Dość dużo danych znaleźć można w publikacjach z lat osiemdziesiątych ubiegłego wieku, kiedy uruchamiano jednostki o podobnej wiel-kości, głównie w elektrowniach atomowych. Na podstawie wielu pozycji [np. 3–7], dokonano zestawienia para-metrów mechanicznych turbozespołu. Na rys. 3 pokazano, dla zakresu mocy jednostek 500÷1100 MVA, stałe inercji Hgen generatorów, w jednostkach [p.u.*s] oraz średnią wartość Hgen_mean tych stałych (ok.0,82 p.u.*s), a także sumy stałych inercji wszystkich turbin Hturb_sum napędzających generator oraz średnią wartość Hturb_sum_mean tych sum (ok. 2,96 p.u.*s). Stałe inercji H pozwalają obliczyć momenty bezwładności J.
�
��
�������
���������
��
�������
���������
��
��������
����������
��
��
��
��
��
��
�
0
1
2
3
4
5
6
500 600 700 800 900 1000 1100 1200
H gen
H turb sum
H gen_mean
H turb_sum_mean
S g e n [ M V A ]
����������
�����������
Rys. 2. Rozwiązania wyprowadzenia mocy z genera-tora dużej mocy: a) rozwiązanie tradycyjne, b) układ z dwoma transformatorami trójfazowymi, c) układ z trzema transformatorami jednofazowymi
Rys. 1. Struktura turbozespołu w przyjętym bloku referencyjnym 1000 MW
Rys. 3. Stałe inercji Hgen generatorów, sumy stałych inercji turbin Hturb_sum oraz średnie tych wartości Hgen_mean i Hturb_sum_mean dla bloków różnych mocy
Józef Wiśniewski / Politechnika Łódzka
a) b) c)
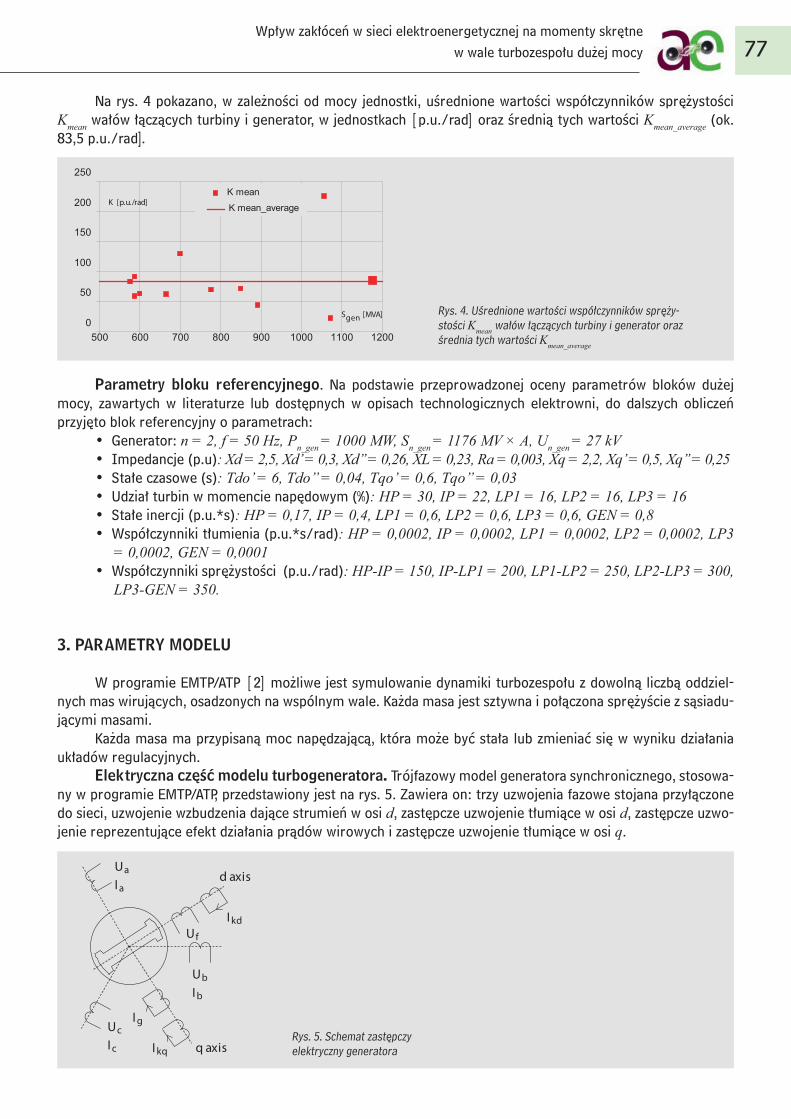
77
Na rys. 4 pokazano, w zależności od mocy jednostki, uśrednione wartości współczynników sprężystości Kmean wałów łączących turbiny i generator, w jednostkach [p.u./rad] oraz średnią tych wartości Kmean_average (ok. 83,5 p.u./rad].
Parametry bloku referencyjnego. Na podstawie przeprowadzonej oceny parametrów bloków dużej mocy, zawartych w literaturze lub dostępnych w opisach technologicznych elektrowni, do dalszych obliczeń przyjęto blok referencyjny o parametrach:
• Generator: n = 2, f = 50 Hz, Pn_gen = 1000 MW, Sn_gen = 1176 MV × A, Un_gen = 27 kV• Impedancje (p.u): Xd = 2,5, Xd’ = 0,3, Xd’’ = 0,26, XL = 0,23, Ra = 0,003, Xq = 2,2, Xq’ = 0,5, Xq’’ = 0,25• Stałe czasowe (s): Tdo’ = 6, Tdo’’ = 0,04, Tqo’ = 0,6, Tqo’’ = 0,03• Udział turbin w momencie napędowym (%): HP = 30, IP = 22, LP1 = 16, LP2 = 16, LP3 = 16• Stałe inercji (p.u.*s): HP = 0,17, IP = 0,4, LP1 = 0,6, LP2 = 0,6, LP3 = 0,6, GEN = 0,8• Współczynniki tłumienia (p.u.*s/rad): HP = 0,0002, IP = 0,0002, LP1 = 0,0002, LP2 = 0,0002, LP3
= 0,0002, GEN = 0,0001• Współczynniki sprężystości (p.u./rad): HP-IP = 150, IP-LP1 = 200, LP1-LP2 = 250, LP2-LP3 = 300,
LP3-GEN = 350.
3. PARAMETRY MODELU
W programie EMTP/ATP [2] możliwe jest symulowanie dynamiki turbozespołu z dowolną liczbą oddziel-nych mas wirujących, osadzonych na wspólnym wale. Każda masa jest sztywna i połączona sprężyście z sąsiadu-jącymi masami.
Każda masa ma przypisaną moc napędzającą, która może być stała lub zmieniać się w wyniku działania układów regulacyjnych.
Elektryczna część modelu turbogeneratora. Trójfazowy model generatora synchronicznego, stosowa-ny w programie EMTP/ATP, przedstawiony jest na rys. 5. Zawiera on: trzy uzwojenia fazowe stojana przyłączone do sieci, uzwojenie wzbudzenia dające strumień w osi d, zastępcze uzwojenie tłumiące w osi d, zastępcze uzwo-jenie reprezentujące efekt działania prądów wirowych i zastępcze uzwojenie tłumiące w osi q.
�
0
50
100
150
200
250
500 600 700 800 900 1000 1100 1200
K mean
K mean_average
�
� �����������
����������Rys. 4. Uśrednione wartości współczynników spręży-stości Kmean wałów łączących turbiny i generator oraz średnia tych wartości Kmean_average
Rys. 5. Schemat zastępczy elektryczny generatora
� ������
������
���� ��
� ������
���
� ���
�������
�������
Wpływ zakłóceń w sieci elektroenergetycznej na momenty skrętne w wale turbozespołu dużej mocy
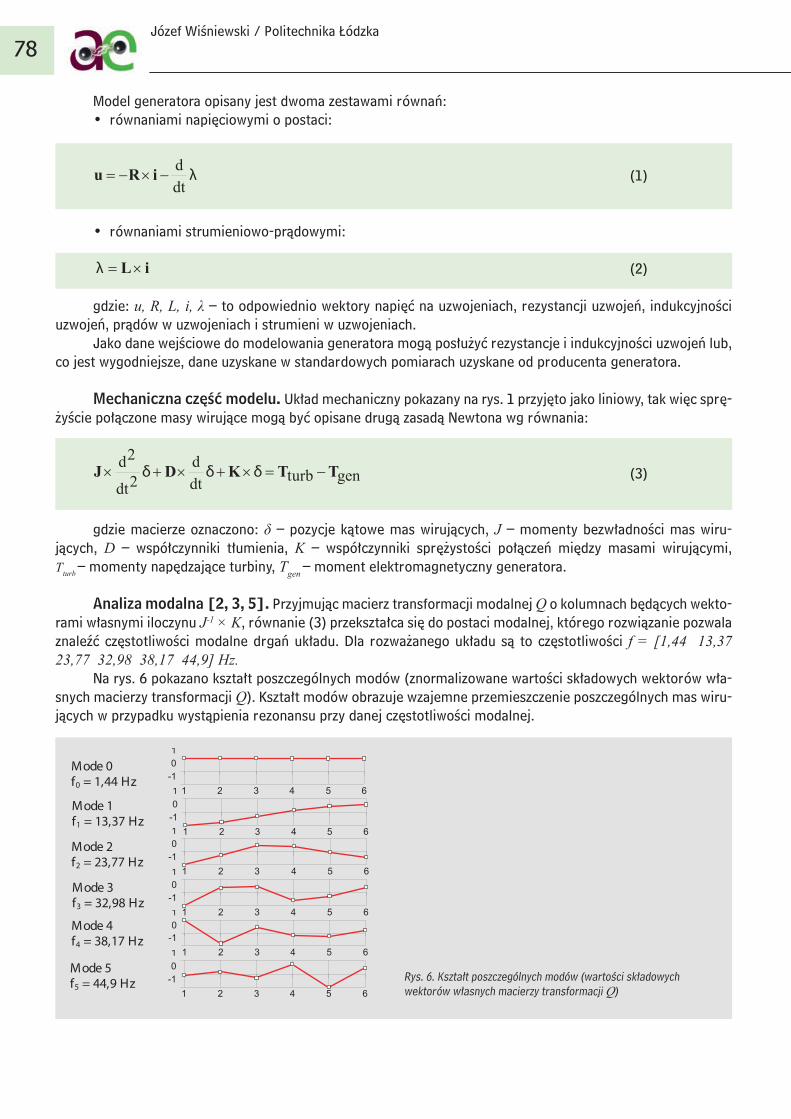
78
Model generatora opisany jest dwoma zestawami równań:• równaniami napięciowymi o postaci:
�iRu
dtd
(1)
• równaniami strumieniowo-prądowymi:
iL� (2)
gdzie: u, R, L, i, λ – to odpowiednio wektory napięć na uzwojeniach, rezystancji uzwojeń, indukcyjności uzwojeń, prądów w uzwojeniach i strumieni w uzwojeniach.
Jako dane wejściowe do modelowania generatora mogą posłużyć rezystancje i indukcyjności uzwojeń lub, co jest wygodniejsze, dane uzyskane w standardowych pomiarach uzyskane od producenta generatora.
Mechaniczna część modelu. Układ mechaniczny pokazany na rys. 1 przyjęto jako liniowy, tak więc sprę-żyście połączone masy wirujące mogą być opisane drugą zasadą Newtona wg równania:
genturbdt
d2dt
2d TT�K�D�J (3)
gdzie macierze oznaczono: δ – pozycje kątowe mas wirujących, J – momenty bezwładności mas wiru-jących, D – współczynniki tłumienia, K – współczynniki sprężystości połączeń między masami wirującymi, Tturb – momenty napędzające turbiny, Tgen – moment elektromagnetyczny generatora.
Analiza modalna [2, 3, 5]. Przyjmując macierz transformacji modalnej Q o kolumnach będących wekto-rami własnymi iloczynu J-1 × K, równanie (3) przekształca się do postaci modalnej, którego rozwiązanie pozwala znaleźć częstotliwości modalne drgań układu. Dla rozważanego układu są to częstotliwości f = [1,44 13,37 23,77 32,98 38,17 44,9] Hz.
Na rys. 6 pokazano kształt poszczególnych modów (znormalizowane wartości składowych wektorów wła-snych macierzy transformacji Q). Kształt modów obrazuje wzajemne przemieszczenie poszczególnych mas wiru-jących w przypadku wystąpienia rezonansu przy danej częstotliwości modalnej.
���������������������
���������������������
���������������������
���������������������
���������������������
��������������������
-101
1 2 3 4 5 6
-101
1 2 3 4 5 6
-101
1 2 3 4 5 6
-101
1 2 3 4 5 6
-101
1 2 3 4 5 6
-101
1 2 3 4 5 6
Rys. 6. Kształt poszczególnych modów (wartości składowych wektorów własnych macierzy transformacji Q)
Józef Wiśniewski / Politechnika Łódzka

79
Na rys. 7 pokazano zależność maksymalnych momentów skrętnych Ti (odniesionych do momentów zna-mionowych wałów), w poszczególnych odcinkach wałów w funkcji częstotliwości sinusoidalnego wymuszenia zewnętrznego od strony sieci, o amplitudzie 1% momentu znamionowego Tn_gen, działającego na wirnik gene-ratora. Widoczne jest silne wzmocnienie sygnału wymuszającego o częstotliwościach drgań własnych układu, objawiające się wartościami momentów skrętnych przekraczających wartości znamionowe.
Należy zauważyć, że nawet przy tak małym pobudzeniu wirnika momentem zakłócającym, przy pewnych częstotliwościach rezonansowych momenty skrętne przekraczają wartości znamionowe dla tych wałów.
4. OBLICZANIE MOMENTÓW SKRĘTNYCH DZIAŁAJĄCYCH NA WAŁY TURBOZESPOŁU
Oddziaływanie sieci na wirnik. Sprawdzono wrażliwość układu wirującego na działanie sygnału zakłó-cającego o częstotliwości bliskiej częstotliwości drgań własnych. Zakłócenie takie może przyjść od strony sieci elektroenergetycznej w postaci prądu obciążenia generatora, zawierającego składową o odpowiedniej częstotli-wości. Coraz większa liczba urządzeń energoelektronicznych w sieci sprzyja takiej sytuacji. Założono obecność momentu zakłócającego o przebiegu sinusoidalnym, częstotliwości równej częstotliwości rezonansowej i ampli-tudzie równej 1% momentu znamionowego. Programem EMTP/ATP wykonano obliczenia symulacyjne momen-tów skrętnych dla generatora obciążonego znamionowo oraz zsynchronizowanego, pracującego bez obciążenia. W odcinkach wałów pojawiały się znaczne wartości momentów skrętnych, przy czym ich wartości były większe w przypadku generatora obciążonego. Modelowany układ wyprowadzenia mocy generatora pokazano na rys. 8.
�
0.001
0.01
0.1
1
10
0 10 20 30 40 50
T1T2T3T4T5
��������
���������
Rys. 7. Zależność maksymalnych momentów skręt-nych w poszczególnych odcinkach wałów w funkcji częstotliwości sinusoidalnego wymuszenia zewnętrznego o amplitudzie 1% Tn_gen przyłożonego do wirnika generatora
�
��
�� ���� ���
������ �������������
�����������
Rys. 8. Modelowany układ wyprowadzenia mocy generatora
Na rys. 9 pokazano amplitudy momentów skrętnych, wyrażone w jednostkach względnych (p.u.), odnie-sione do momentów znamionowych każdego z odcinków wału, przy działaniu na wirnik generatora momentu zakłócającego. Generator jest obciążony pełną mocą.
�
0
1
2
3
4
5
13.4 23.8 33.0 38.2 44.9
T1maxT2maxT3maxT4maxT5max
�
����������
�����
�������
Rys. 9. Amplitudy momentów skrętnych, przy działaniu na wirnik generatora momentu za-kłócającego o amplitudzie równej 1% momentu znamionowego Tn_gen
Wpływ zakłóceń w sieci elektroenergetycznej na momenty skrętne w wale turbozespołu dużej mocy
f [Hz]
fres[Hz]
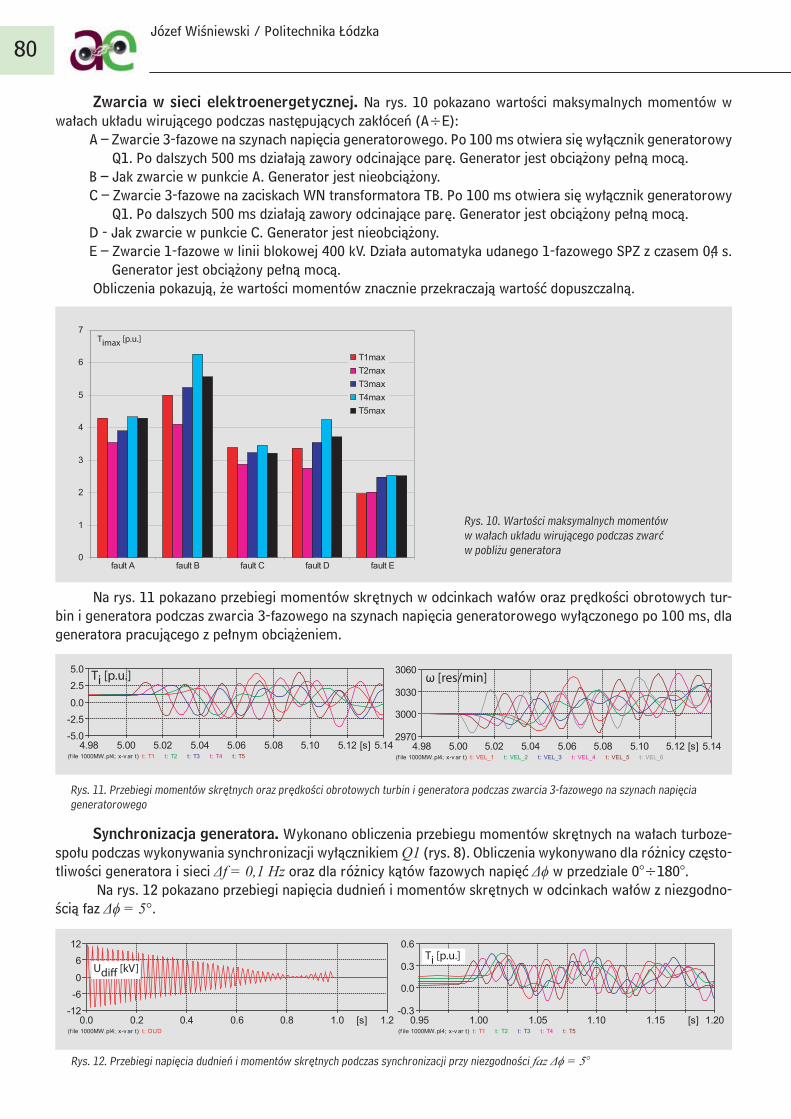
80
Zwarcia w sieci elektroenergetycznej. Na rys. 10 pokazano wartości maksymalnych momentów w wałach układu wirującego podczas następujących zakłóceń (A÷E):
A – Zwarcie 3-fazowe na szynach napięcia generatorowego. Po 100 ms otwiera się wyłącznik generatorowy Q1. Po dalszych 500 ms działają zawory odcinające parę. Generator jest obciążony pełną mocą.
B – Jak zwarcie w punkcie A. Generator jest nieobciążony.C – Zwarcie 3-fazowe na zaciskach WN transformatora TB. Po 100 ms otwiera się wyłącznik generatorowy
Q1. Po dalszych 500 ms działają zawory odcinające parę. Generator jest obciążony pełną mocą.D - Jak zwarcie w punkcie C. Generator jest nieobciążony.E – Zwarcie 1-fazowe w linii blokowej 400 kV. Działa automatyka udanego 1-fazowego SPZ z czasem 0,4 s.
Generator jest obciążony pełną mocą.Obliczenia pokazują, że wartości momentów znacznie przekraczają wartość dopuszczalną.
Na rys. 11 pokazano przebiegi momentów skrętnych w odcinkach wałów oraz prędkości obrotowych tur-bin i generatora podczas zwarcia 3-fazowego na szynach napięcia generatorowego wyłączonego po 100 ms, dla generatora pracującego z pełnym obciążeniem.
�
0
1
2
3
4
5
6
7
fault A fault B fault C fault D fault E
T1maxT2maxT3maxT4maxT5max
�
������������
Rys. 11. Przebiegi momentów skrętnych oraz prędkości obrotowych turbin i generatora podczas zwarcia 3-fazowego na szynach napięcia generatorowego
Synchronizacja generatora. Wykonano obliczenia przebiegu momentów skrętnych na wałach turboze-społu podczas wykonywania synchronizacji wyłącznikiem Q1 (rys. 8). Obliczenia wykonywano dla różnicy często-tliwości generatora i sieci Δf = 0,1 Hz oraz dla różnicy kątów fazowych napięć Δϕ w przedziale 0°÷180°.
Na rys. 12 pokazano przebiegi napięcia dudnień i momentów skrętnych w odcinkach wałów z niezgodno-ścią faz Δϕ = 5°.
Rys. 10. Wartości maksymalnych momentów w wałach układu wirującego podczas zwarć w pobliżu generatora
�
�
(f ile 1000MW.pl4; x-v ar t) t: T1 t: T2 t: T3 t: T4 t: T5 4.98 5.00 5.02 5.04 5.06 5.08 5.10 5.12 5.14[s]
-5.0
-2.5
0.0
2.5
5.0
��
(f ile 1000MW.pl4; x-v ar t) t: VEL_1 t: VEL_2 t: VEL_3 t: VEL_4 t: VEL_5 t: VEL_6 4.98 5.00 5.02 5.04 5.06 5.08 5.10 5.12 5.14[s]
2970
3000
3030
3060
�
��������� �����������
�
�
(f ile 1000MW.pl4; x-v ar t) t: DUD 0.0 0.2 0.4 0.6 0.8 1.0 1.2[s]
-12
-6
0
6
12
�
�
(f ile 1000MW.pl4; x-v ar t) t: T1 t: T2 t: T3 t: T4 t: T5 0.95 1.00 1.05 1.10 1.15 1.20[s]
-0.3
0.0
0.3
0.6
�
������������������
Rys. 12. Przebiegi napięcia dudnień i momentów skrętnych podczas synchronizacji przy niezgodności faz Δϕ = 5°
Józef Wiśniewski / Politechnika Łódzka

81
BIBLIOGRAFIA
Zależność wielkości maksymalnych momentów skrętnych Ti w kolejnych odcinkach wału podczas synchro-nizacji od różnicy kątów fazowych Δϕ pokazano na rys. 13.
Z obliczeń wynika, że dla badanego turbozespołu maksymalne wartości momentów dla różnych odcinków wału występują przy synchronizacji z różnicą kątów fazowych Δϕ zawierającą się w przedziale od 110°÷130°.
Faza napięcia w chwili zamykania napięcia nie ma wpływu na wielkość momentów skrętnych na wale.
5. PODSUMOWANIE
• Obliczenie częstotliwości drgań własnych układu wirującego mas turbin i generatora jest ważnym ele-mentem programowania pracy turbozespołu. Pozwala uniknąć pracy w warunkach zagrożenia, pojawie-nia się drgań oscylacyjnych spowodowanych wymuszeniem zewnętrznym.
• Obliczenia wielkości momentów skrętnych podczas zakłóceń zewnętrznych mogą być przydatne do ustalenia przyczyn uszkodzenia wału, stosowania środków zaradczych a także do ustalenia zasad eks-ploatacji generatora.
• Rozważane przypadki zwarć, synchronizacji oraz zewnętrznego oddziaływania na wirnik generatora mo-mentem elektromagnetycznym o częstotliwości rezonansowej, charakteryzowały się znacznymi warto-ściami momentów skrętnych przekraczającymi przyjęty poziom wartości bezpiecznej.
1. Zagadnienia projektowania i eksploatacji kotłów i turbin do nadkrytycznych bloków węglowych, praca zbiorowa, Wydawnictwo Politechniki Śląskiej, Gliwice 2010.
2. EMTP Rule Book and Theory Book, Bonneville Power Administration, 1987.3. Machowski J., Białek J., Bumby J., Power System Dynamics and Stability, John Wiley & Sons Ltd., 1997.4. Jennings G., Harley R., New index parameter for rapid evaluation of turbo-generator subsynchronous resonance
susceptibility, Electric Power Systems Research, 37, 1996.5. Jose A., Castillo J., Turbo-generator torsional behavior using the participation factors and considering the static loads
model. Transmission and Distribution Conference and Exposition: Latin America, IEEE/PES, 2008.6. Maljkovic Z., Stegic M., Kuterovac L., Torsional oscillations of the turbine-generator due to network faults, 14th In-
ternational Power Electronics and Motion Control Conference, EPE-PEMC, 2010.7. Tsai J., A new single-pole switching technique for suppressing turbine-generator torsional vibrations and enhancing
power stability and continuity, IET Gener. Transm. Distrib., 5, 2007.
Rys. 13. Zależność wielkości maksymalnych momentów skrętnych podczas synchroniza-cji od różnicy kątów fazowych Δφ
�
0
2
4
6
8
10
0 50 100 150
T1maxT2maxT3maxT4maxT5max
�
�����
������������
������
Wpływ zakłóceń w sieci elektroenergetycznej na momenty skrętne w wale turbozespołu dużej mocy

82Zbigniew Zdun / PLANS, MikronikaMarek Wawrzyniak / Mikronika
Autorzy / Biografie
Marek WawrzyniakPoznań / Polska
W 1995 roku ukończył Politechnikę Poznańską z ty-tułem mgr. inż. matematyki (metody numeryczne).Od 1995 roku zatrudniony w BRSPMSA Mikronika na stanowiskach: programista, kierownik projek-tów. A od 2005 roku jest dyrektorem IT i oprogra-mowania.
Zbigniew ZdunWarszawa / Polska
Ukończył studia na Wydziale Elektrycznym Poli-techniki Warszawskiej (1972) i uzyskał tytuł dokto-ra nauk technicznych (1978). W latach 1972–2008 pracował jako nauczyciel akademicki w Zakładzie Sieci i Systemów Elektroenergetycznych Instytutu Elektroenergetyki na Wydziale Elektrycznym Poli-techniki Warszawskiej. W pracy naukowej zajmował się metodami wyznaczania i analizami stanów elektroenergetycznych układów przesyłowych. Jest autorem i współautorem ponad trzydziestu prac opublikowanych w czasopismach i materiałach konferencyjnych, dwóch podręczników i ponad stu prac wykonanych dla krajowej elektroenergetyki, z których wiele zostało wdrożonych.W 1993 roku założył firmę PLANS, która prowadzi prace badawczo-rozwojowe w dziedzinie nauk technicznych i z zakresu oprogramowania. Opra-cował pakiet oprogramowania PLANS do wyzna-czania rozpływów mocy w sieciach przesyłowych, użytkowany w PSE Operator, w krajowych spółkach dystrybucyjnych, a także w przedsiębiorstwach pracujących na rzecz krajowej energetyki. We współpracy z firmą Mikronika opracował system obliczeniowy stanów pracy sieci najwyższych na-pięć współpracujący z systemem pomiarowym w czasie rzeczywistym typu SCADA- EMS (Syndi-sRV – PlansRVS), który został wdrożony w EC_Nowa (Huta Mittal), EnergiaPro (Wrocław), KIB-TEK (Cypr).

83
ZASTOSOWANIE FORMATU CIM W MODELOWANIU SIECI ELEKTROENERGETYCZNEJ W SYSTEMIE SYNDIS-PLANS
dr inż. Zbigniew Zdun / PLANS, Mikronikamgr inż. Marek Wawrzyniak / Mikronika
1. MODEL CIMW przedsiębiorstwach eksploatujących wiele złożonych systemów coraz większy nacisk kładzie się na ko-
operację między nimi. Ciekawą propozycję w tym świetle stanowi pakiet norm IEC 61968 i IEC 61970, określa-nych wspólnie jako CIM (ang. Common Information Model). Normy te są podstawą dla polskich odpowiedników PN-EN 61969 i PN-EN 61907. Celem CIM jest wprowadzenie standardu wymiany danych pomiędzy różnymi systemami komputerowymi poprzez wspólny abstrakcyjny model danych. Zazwyczaj każdy program używa swo-jego własnego modelu danych. Jeśli dochodzi do wymiany informacji pomiędzy programami, to zazwyczaj jeden z programów ma specjalny sterownik do danych z drugiego programu (rys. 1).
Wymiana wiadomości zapisanych w standardzie CIM pomiędzy różnymi aplikacjami informatycznymi po-winna dostarczyć istotnych informacji dla wszystkich innych aplikacji, które dzielą ten sam wspólny model da-nych. Klasy (typy) modelu CIM stanowią odwzorowanie obiektów sieci elektroenergetycznej, ich stanów oraz po-łączeń, zawierają atrybuty opisujące ich właściwości, a także relacje opisujące powiązania między tymi klasami. Ich definicja ma charakter hierarchiczny, co oznacza grupowanie takich samych atrybutów i relacji do zbiorów oraz reprezentowanie ich w postaci abstrakcyjnej klasy bazowej, z której wywodzą się inne, bardziej uszczegó-łowione.
Zastosowanie formatu CIM w modelowaniu sieci elektroenergetycznej w systemie SYNDIS-PLANS
Streszczenie
W artykule przedstawiono zastosowanie standardu CIM w modelowaniu sieci przesyłowej w systemie SYN-DIS-PLANS. System SYNDIS jest systemem typu SCADA i został zintegrowany z pakietem PLANS, powszechnie stosowanym w KSE do wykonywania obliczeń i analiz rozpływowych. W elektroenergetyce stosowane są różne programy, które działają na podstawie własnych modeli danych. Wymiana danych pomiędzy różnymi pakietami jest utrudniona. Pojawiła się więc potrzeba opracowania wspólnego modelu danych, która znacznie upraszcza wymianę danych pomiędzy aplikacjami. Prace nad stwo-rzeniem wspólnego opisu sieci elektroenergetycznej były
prowadzone w EPRI i doprowadziły do standardu opisu sieci – modelu CIM (ang. Common Information Model). W referacie zaprezentowano podstawowe zasady mode-lowania zgodne ze standardem CIM, z opisem podsta-wowych klas CIM wykorzystanych w modelowaniu sieci przesyłowej w systemie SYNDIS-PLANS wraz z opisem przeglądarki elementów sieci elektroenergetycznej. Ar-tykuł zawiera również opis sposobu integracji pakietu do obliczania rozpływów mocy PLANS z systemem SYNDIS. Przedstawiono też wykaz zastosowań pakietu SYNDIS--PLANS w elektroenergetyce.
Rys. 1. Wymiana danych – obecnie (bez CIM)
EMS
Zarządzaniepracą
HurtowniadanychSCADA
Portal
GIS

84
Wspólny model znacznie upraszcza wymianę danych pomiędzy aplikacjami.
Rys. 2. Komunikacja pomiędzy aplikacjami – wg CIM
Poniżej przedstawiono w skrócie zestaw podstawowych klas modelu CIM, wykorzystany w systemie SYN-DIS-PLANS.
Substation reprezentuje stację energetycznąBusbarSection sekcja szynBay pole w stacjiBreaker wyłącznikDisconnector klasa reprezentująca odłącznikTerminal punkt połączenia elektrycznego urządzenia przewodzącegoConnectivityNode węzeł połączeniowyGroundDisconnector uziemnikPowerTransformer klasa reprezentująca transformator
TransformerWindinguzwojenie transformatora, każde uzwojenie jest reprezento-wane przez oddzielny element klasy TransformerWinding
TapChanger przełącznik zaczepów transformatoraACLineSegment odcinek linii prądu przemiennegoJunction punkt, w którym urządzenia są połączone zerową rezystancjąUnit wielkość mierzona w systemie, np. A, MWh, kVMeasurementType typ pomiaruDiscrete pomiar wartości dyskretnychAnalog pomiar analogowy
ConductorTypetyp przewodu, opisuje parametry elektryczne kabli i przewo-dów
WireArrangementkonfiguracja, odstępy, identyfikacja przewodów typu Conduc-torType
WireType typ przewodu elektrycznego
Dla przykładu istnieje w standardzie CIM typ abstrakcyjny ProtectedSwitch, który otrzymuje atrybuty i relacje z klasy Switch. Z typu ProtectedSwitch wywodzą się klasy Breaker oraz Disconnector. Breaker oraz Disconector zawierają atrybuty i relacje z klas Switch oraz ProtectedSwitch, a dodatkowo dodają własne, specy-ficzne dla siebie atrybuty, które nie są widoczne dla klas Switch oraz ProtectedSwitch. Atrybuty i relacje dodane w klasie Breaker nie są widoczne w Disconector, a atrybuty dodane w klasie Disconector nie są widoczne w Breaker. Niektóre urządzenia modelowane są jako zbudowane z kilku części składowych, np. transformator jest reprezentowany przez klasę PowerTransformer, z osobno modelowanymi uzwojeniami poprzez klasę Transfor-merWinding wraz z przełącznikiem zaczepów TapChanger. Na rys. 3. przedstawiono przykładowe pole w stacji.
map
owan
ie d
o m
odel
u
map
owan
ie d
o m
odel
u
Aplikacja 1 Aplikacja 2
Zbigniew Zdun / PLANS, MikronikaMarek Wawrzyniak / Mikronika

85
Rys. 3. Przykładowe pole liniowe w stacji dwuszynowej
Na ilustracji jest przedstawione pole Bay, połączone z dwoma sekcjami szyn BusbarSection. Połączenie to jest zrealizowane poprzez węzły (klasa ConnectivityNode) cn1 oraz cn2, które łączą się z terminalami powiąza-nymi z sekcjami szyn oraz odłącznikami d1 i d2. Odłączniki d1 i d2 połączone są ze sobą w węźle cn3 poprzez terminale. Do węzła cn3 połączony jest także uziemnik poprzez terminale (klasa Terminal) t1, t2 oraz wyłącznik b1 również poprzez terminal. Wyłącznik b1 jest także połączony poprzez węzeł cn4 i terminale z odłącznikiem d3. Ten z kolei łączy się w węźle cn5 poprzez terminale z uziemnikiem oraz segmentem linii. Wszystkie obiekty klasy Disconnector, Breaker oraz GroundDisconnector znajdują się w polu Bay.
2. CIM W SYSTEMIE SYNDIS
W systemie SYNDIS sieć elektroenergetyczna jest modelowana zgodnie z CIM, to znaczy, że elementy tej sieci mają swoje odzwierciedlenie w strukturze klas tego modelu. Każdy element posiada unikatowy, liczbowy identyfikator Sid, który jednoznacznie określa go w bazie systemu SYNDIS. System został wyposażony w prze-glądarkę elementów sieci elektroenergetycznej, modelowanych w systemie CIM. Przykładowy diagram stacji dwuszynowej przedstawia rys. 4. Jest to dwuszynowa stacja 110 kV z dwoma polami liniowymi oraz dwoma polami transformatorowymi 110 kV/SN i polem wyłącznika sprzęgłowego.
Zastosowanie formatu CIM w modelowaniu sieci elektroenergetycznej w systemie SYNDIS-PLANS
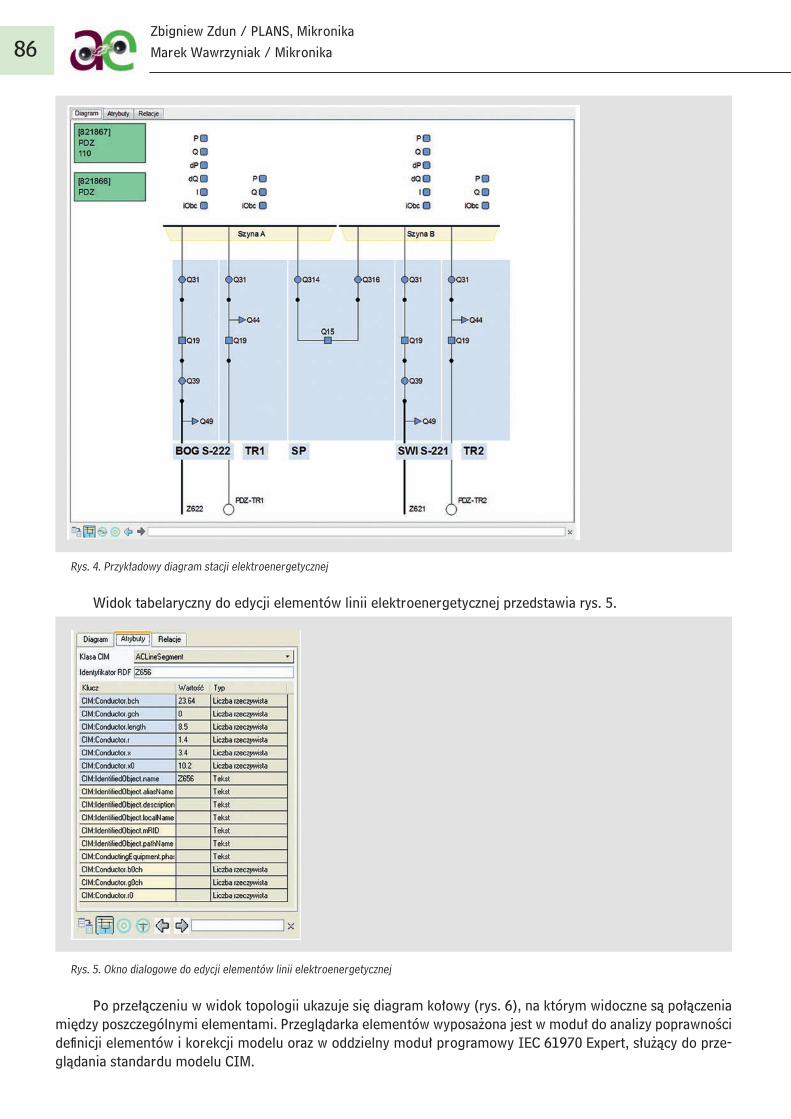
86
Rys. 5. Okno dialogowe do edycji elementów linii elektroenergetycznej
Po przełączeniu w widok topologii ukazuje się diagram kołowy (rys. 6), na którym widoczne są połączenia między poszczególnymi elementami. Przeglądarka elementów wyposażona jest w moduł do analizy poprawności definicji elementów i korekcji modelu oraz w oddzielny moduł programowy IEC 61970 Expert, służący do prze-glądania standardu modelu CIM.
Zbigniew Zdun / PLANS, MikronikaMarek Wawrzyniak / Mikronika
Rys. 4. Przykładowy diagram stacji elektroenergetycznej
Widok tabelaryczny do edycji elementów linii elektroenergetycznej przedstawia rys. 5.

87
Rys. 6. Przykładowy widok topologii
3. MODELOWANIE CIM
Zmiany modelu sieci zgodne z normą CIM są dość skomplikowane, wymagają dużej wiedzy oraz biegłości w posługiwaniu się klasami standardu. System został wyposażony w następujące kreatory ułatwiające edycję modelu:
• nowa stacja• wcięcie lub odczep na linii• łączenie stacji linią• nowe pole liniowe• nowe pole z generacją• nowe pole transformatorowe (obciążenia).
Rys. 7. Kreator tworzenia wcięcia na linii
Zastosowanie formatu CIM w modelowaniu sieci elektroenergetycznej w systemie SYNDIS-PLANS
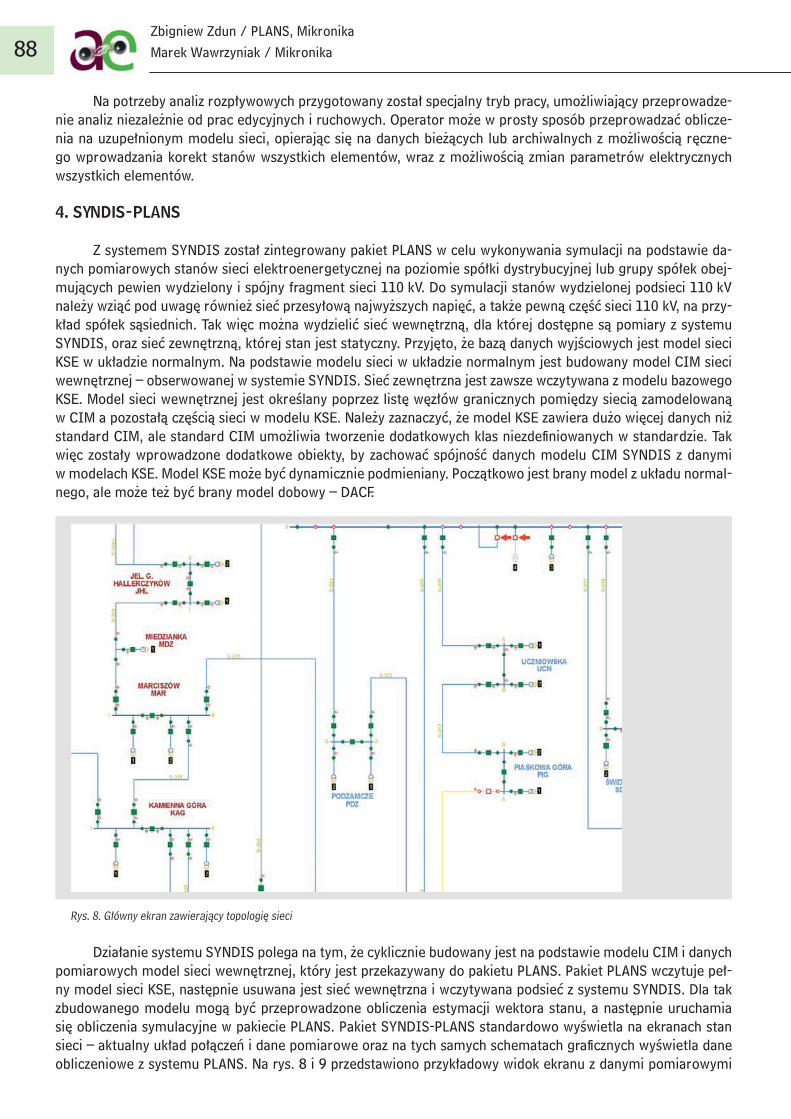
88
Na potrzeby analiz rozpływowych przygotowany został specjalny tryb pracy, umożliwiający przeprowadze-nie analiz niezależnie od prac edycyjnych i ruchowych. Operator może w prosty sposób przeprowadzać oblicze-nia na uzupełnionym modelu sieci, opierając się na danych bieżących lub archiwalnych z możliwością ręczne-go wprowadzania korekt stanów wszystkich elementów, wraz z możliwością zmian parametrów elektrycznych wszystkich elementów.
4. SYNDIS-PLANS
Z systemem SYNDIS został zintegrowany pakiet PLANS w celu wykonywania symulacji na podstawie da-nych pomiarowych stanów sieci elektroenergetycznej na poziomie spółki dystrybucyjnej lub grupy spółek obej-mujących pewien wydzielony i spójny fragment sieci 110 kV. Do symulacji stanów wydzielonej podsieci 110 kV należy wziąć pod uwagę również sieć przesyłową najwyższych napięć, a także pewną część sieci 110 kV, na przy-kład spółek sąsiednich. Tak więc można wydzielić sieć wewnętrzną, dla której dostępne są pomiary z systemu SYNDIS, oraz sieć zewnętrzną, której stan jest statyczny. Przyjęto, że bazą danych wyjściowych jest model sieci KSE w układzie normalnym. Na podstawie modelu sieci w układzie normalnym jest budowany model CIM sieci wewnętrznej – obserwowanej w systemie SYNDIS. Sieć zewnętrzna jest zawsze wczytywana z modelu bazowego KSE. Model sieci wewnętrznej jest określany poprzez listę węzłów granicznych pomiędzy siecią zamodelowaną w CIM a pozostałą częścią sieci w modelu KSE. Należy zaznaczyć, że model KSE zawiera dużo więcej danych niż standard CIM, ale standard CIM umożliwia tworzenie dodatkowych klas niezdefiniowanych w standardzie. Takwięc zostały wprowadzone dodatkowe obiekty, by zachować spójność danych modelu CIM SYNDIS z danymi w modelach KSE. Model KSE może być dynamicznie podmieniany. Początkowo jest brany model z układu normal-nego, ale może też być brany model dobowy – DACF.
Rys. 8. Główny ekran zawierający topologię sieci
Działanie systemu SYNDIS polega na tym, że cyklicznie budowany jest na podstawie modelu CIM i danych pomiarowych model sieci wewnętrznej, który jest przekazywany do pakietu PLANS. Pakiet PLANS wczytuje peł-ny model sieci KSE, następnie usuwana jest sieć wewnętrzna i wczytywana podsieć z systemu SYNDIS. Dla tak zbudowanego modelu mogą być przeprowadzone obliczenia estymacji wektora stanu, a następnie uruchamia się obliczenia symulacyjne w pakiecie PLANS. Pakiet SYNDIS-PLANS standardowo wyświetla na ekranach stan sieci – aktualny układ połączeń i dane pomiarowe oraz na tych samych schematach graficznych wyświetla daneobliczeniowe z systemu PLANS. Na rys. 8 i 9 przedstawiono przykładowy widok ekranu z danymi pomiarowymi
Zbigniew Zdun / PLANS, MikronikaMarek Wawrzyniak / Mikronika

89
i obliczeniowymi. W pracy symulacyjnej budowany jest dla danej chwili czasowej model sieci i można dokonywać symulacji różnych stanów pracy sieci i wykonywać obliczenia: rozpływowe, analizy N-1, stabilności napięciowej, strat, optymalizacyjne, zwarciowe, nastaw zabezpieczeń. Można również obliczenia symulacyjne wykonywać dla stanów z przeszłości – w trybie retrospekcji.
Rys. 9. Wygląd stacji na mapie zawierający dane pomiarowe i obliczeniowe
5. WDROŻENIA
Zintegrowanie systemu SYNDIS z pakietem PLANS początkowo zostało wykonane jako pilotażowa insta-lacja do badania stabilności napięciowej w części północno-wschodniej krajowego systemu elektroenergetycz-nego w PSE Północ. Na podstawie danych pomiarowych, pobieranych przez system SYNDIS z fragmentów sieci 110 kV, był korygowany model sieci KSE i dla wybranych węzłów wyznaczane były zapasy stabilności napięcio-wej, a także można było obliczyć zapas stabilności napięciowej całego systemu.
Wykorzystanie modelowania sieci elektrycznej w standardzie CIM zostało zastosowane podczas instalacji systemu SYNDIS-PLANS, na potrzeby centralnej dyspozycji we Wrocławiu dla Energii-Pro. Przez system SYNDIS zbierane są dane pomiarowe z pięciu oddziałów Energii-Pro (dawnych pięciu ZE) i z uwzględnieniem pełnej sieci KSE wykonywane obliczenia rozpływowe, zwarciowe wraz z możliwością obliczania kart nastaw zabezpieczeń zwarciowych linii 110 kV.
System SYNDIS-PLANS został zainstalowany w Nikozji w celu monitorowania i sterowania w sieci części północnej Cypru. Sieć 132 kV oraz sieć 66 kV zostały w pełni zamodelowane w standardzie CIM, a szczątkowa sieć zewnętrzna została zbudowana na potrzeby ewentualnego połączenia sieci części północnej z południową. Wykorzystywane są moduły obliczeń rozpływowych, zwarciowe oraz optymalizacyjne, dodatkowo został przete-stowany estymator wektora stanu.
Inną instalacją z wykorzystaniem modelowania w standardzie CIM jest symulator stanów pracy na potrze-by szkolenia dyspozytorów stacyjnych, zainstalowany w PSE Zachód. Wybrane stacje elektroenergetyczne wy-sokiego napięcia KSE zostały zamodelowane w standardzie CIM, a użytkownicy mogą na bieżąco śledzić zmiany rozpływu mocy podczas dokonywania przełączeń w stacjach.
Zastosowanie formatu CIM w modelowaniu sieci elektroenergetycznej w systemie SYNDIS-PLANS

90
BIBLIOGRAFIA
6. PODSUMOWANIE
System SYNDIS-PLANS jest nowoczesnym systemem monitorowania i analizy stanu elektroenergetycznej sieci w czasie rzeczywistym. Umożliwia obserwację stanu pracy sieci bezpośrednio na podstawie danych pomia-rowych, ale również na podstawie danych obliczeniowych z uwzględnieniem estymacji wektora stanu lub bez-pośrednio po wykonaniu obliczeń rozpływowych. Możliwe są także symulacje planowanych stanów sieci, takich jak wyłączenia linii, transformatorów, generatorów itp. Na podstawie obliczeń rozpływowych możliwe jest moni-torowanie stanu bezpieczeństwa sieci elektroenergetycznej. Zintegrowanie pakietu PLANS z systemem SYNDIS umożliwiło ujednolicenie interfejsu graficznego. Na tych samych schematach graficznych i przy użyciu tego sa-mego interfejsu użytkownika jest prezentowany stan sieci zarówno na podstawie pomiarów, jak i symulacji.
1. Zdun Z., Wykonanie programu PLANS_PSE w wersji dla systemu operacyjnego Windows NT z uwzględnieniem roz-szerzonej struktury danych oraz wprowadzenia makropoleceń, praca wykonana na zlecenie PSE SA, 2000.
2. Zdun Z., Zdun T., Wawrzyniak M., Wronek P., Wykorzystanie systemu SYNDIS-PLANS do oceny stabilności napięcio-wej w wybranych obszarach Krajowego Systemu Energetycznego, III Konferencja Naukowo-Techniczna „Blackout”, Poznań, 2008.
3. IEC 61970 Energy management system application program interface (EMS-API) – Part 301: Common information model (CIM) base, IEC, edycja 2.0, 2009.
4. IEC61968 Application integration at electric utilities – System interfaces for distribution management – Part 1: In-terface architecture and general requirements, IEC, edycja 1.0, 2010.
5. Materiały konferencyjne ze spotkania CIM Users Group w Genval (Belgia), 2009, dostępne pod adresem: http://ci-mug.ucaiug.org/Meetings/Genval2009/Presentations.
Zbigniew Zdun / PLANS, MikronikaMarek Wawrzyniak / Mikronika

91

INFORMACJE DLA AUTORÓW
UWAGA!
wamy znaku "×"
2. STRESZCZENIE
3. BIOGRAM
4. FOTOGRAFIE

www. actaenergetica.org


















