Montaż komputera: klasy PC – jednostka tower PRZEZNACZENIE: Multimedia, internet
1
Jednostka mnożąco-sumującą EMAC
(Enhanced Multiply-ACcumulate unit)
2
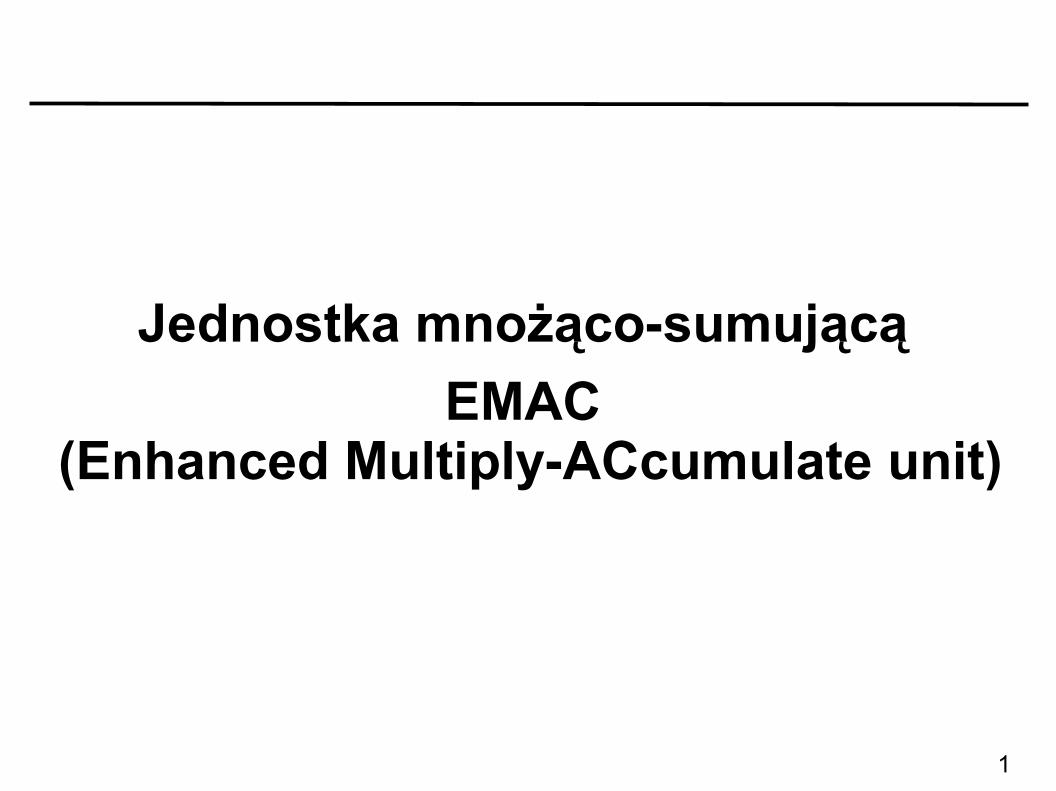
Moduł MAC (1)Moduł MAC (1)
Jednostka arytmetyczna przeznaczona do operacji wykorzystywanych podczas cyfrowej
obróbki sygnałów DSP (Digital Signal Processing).
Sygnały wejściowe
Sygnały wyjściowe
ADC DACProcesor DSP (MAC)
MCF 5250
3
Zastosowanie jednostki EMAC Zastosowanie jednostki EMAC
● Cyfrowe przetwarzanie sygnałów ● Transformaty:
– Fast Fourier transform FFT, – Discrete Cosine Transform (DCT), – Fast Hadamard Transform (FHT), – Discrete Hartley Transform (DHT), itd...
● Filtry cyfrowe:– Finite impulse response filter (FIR), – Infinite impulse response filter (IIR),– Kompresja obrazów, selektywne filtrowanie
sygnałów, sterowniki PID, itd...
4
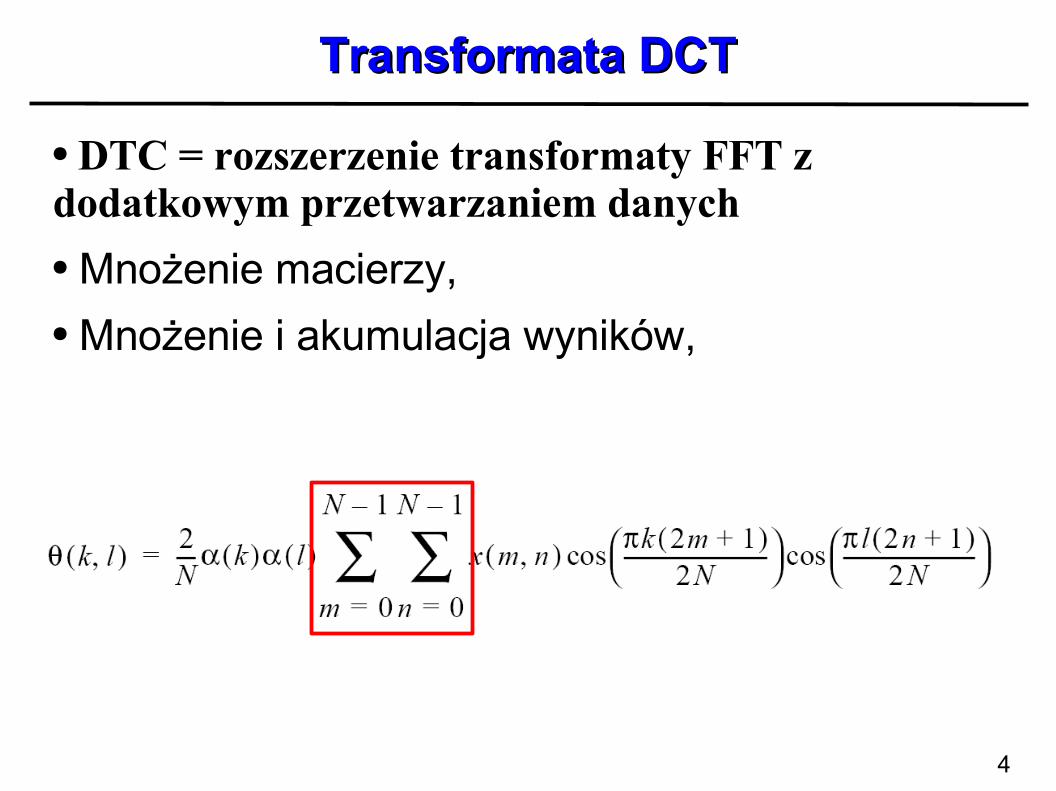
Transformata DCTTransformata DCT
● DTC = rozszerzenie transformaty FFT z dodatkowym przetwarzaniem danych● Mnożenie macierzy,● Mnożenie i akumulacja wyników,
5
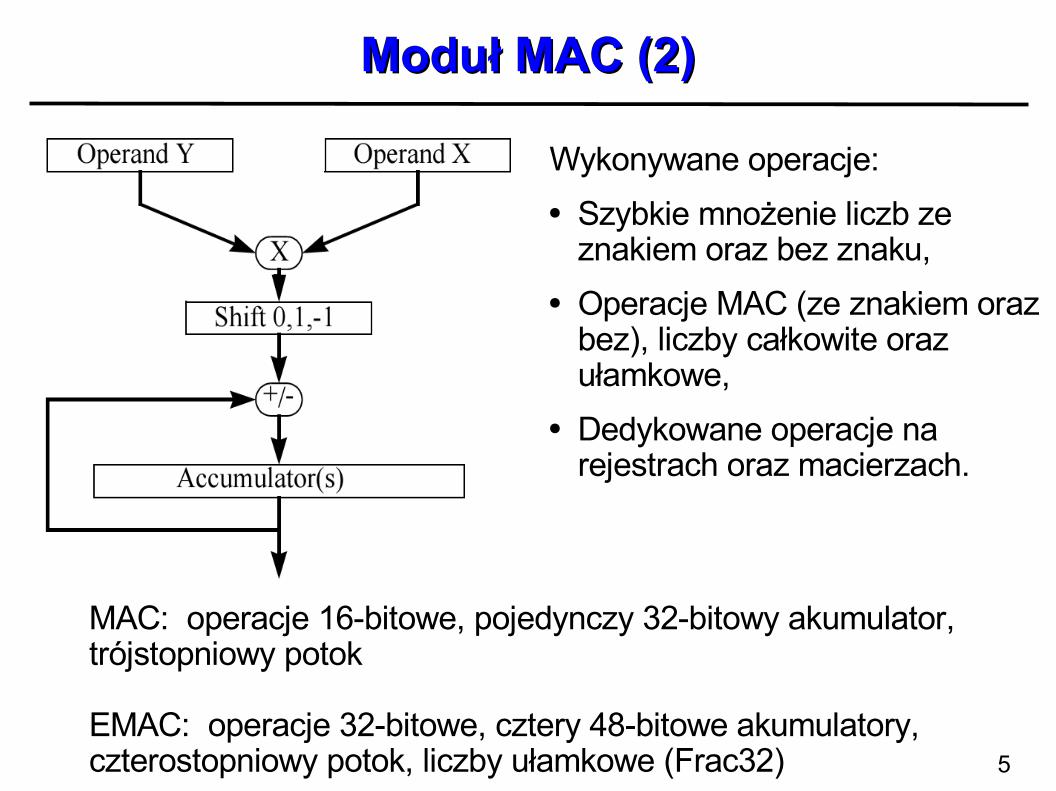
Moduł MAC (2)Moduł MAC (2)
Wykonywane operacje:● Szybkie mnożenie liczb ze
znakiem oraz bez znaku,● Operacje MAC (ze znakiem oraz
bez), liczby całkowite oraz ułamkowe,
● Dedykowane operacje na rejestrach oraz macierzach.
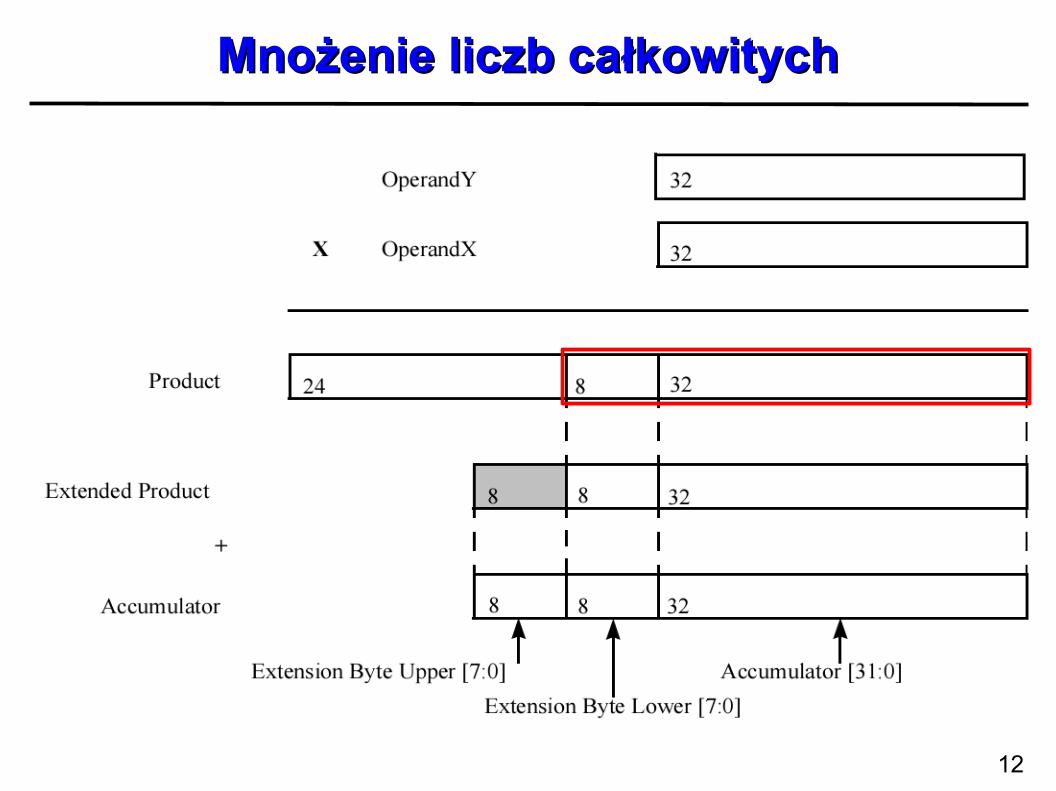
MAC: operacje 16-bitowe, pojedynczy 32-bitowy akumulator, trójstopniowy potok
EMAC: operacje 32-bitowe, cztery 48-bitowe akumulatory, czterostopniowy potok, liczby ułamkowe (Frac32)
6
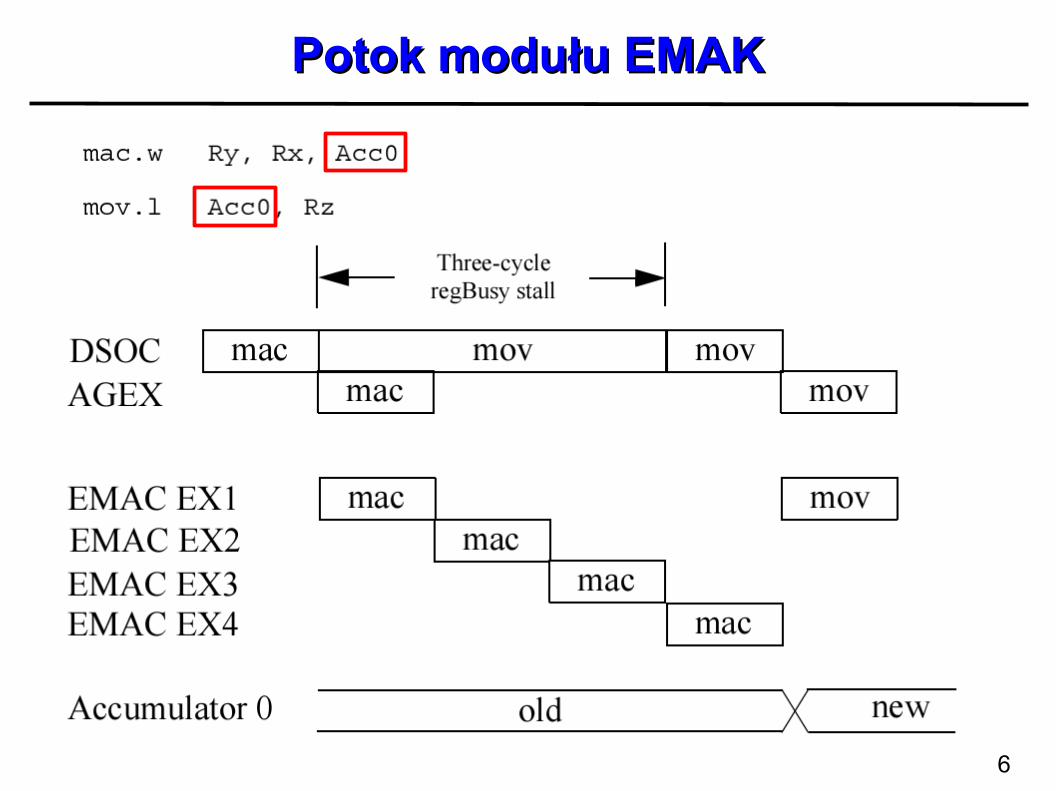
Potok modułu EMAKPotok modułu EMAK
7
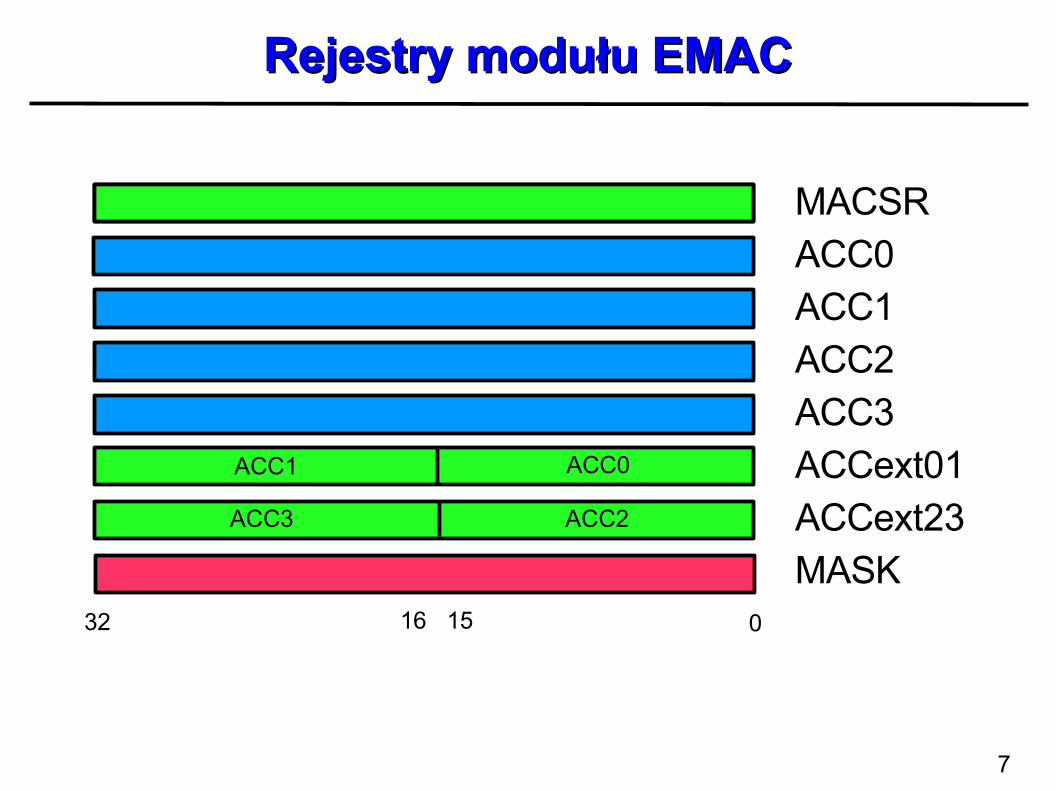
Rejestry modułu EMACRejestry modułu EMAC
MACSRACC0ACC1ACC2ACC3ACCext01ACCext23MASK
032 16 15
ACC0ACC1
ACC2ACC3
8
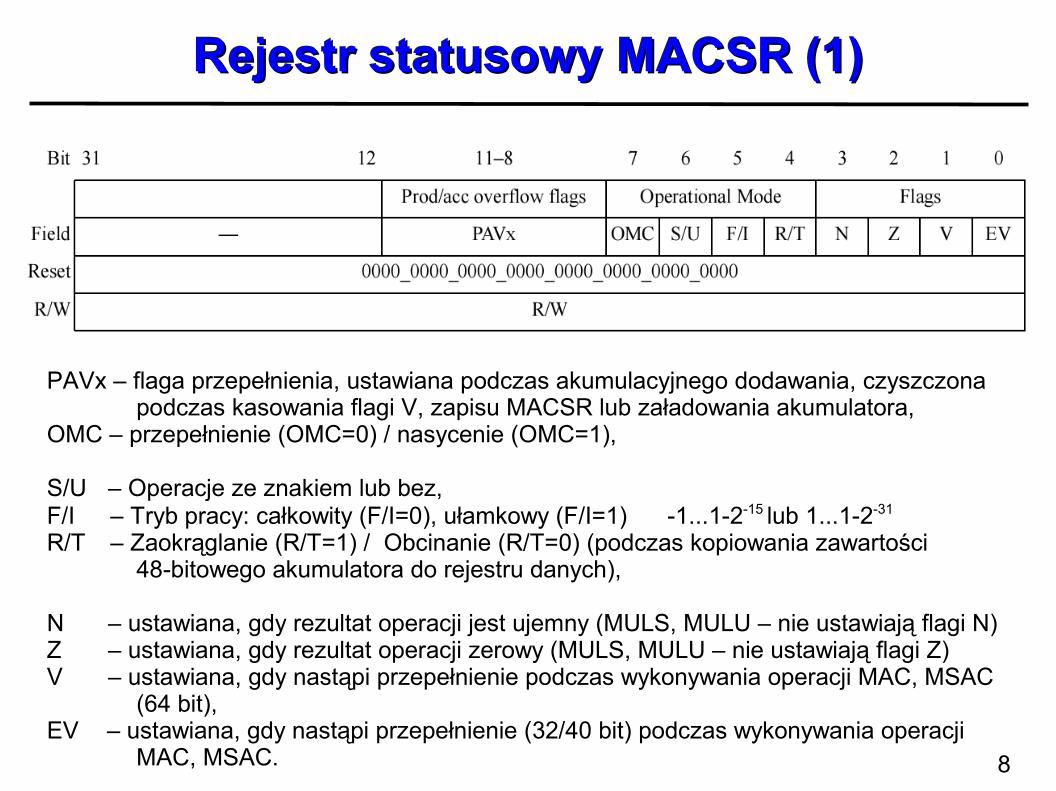
Rejestr statusowy MACSR (1)Rejestr statusowy MACSR (1)
PAVx – flaga przepełnienia, ustawiana podczas akumulacyjnego dodawania, czyszczona podczas kasowania flagi V, zapisu MACSR lub załadowania akumulatora,
OMC – przepełnienie (OMC=0) / nasycenie (OMC=1),
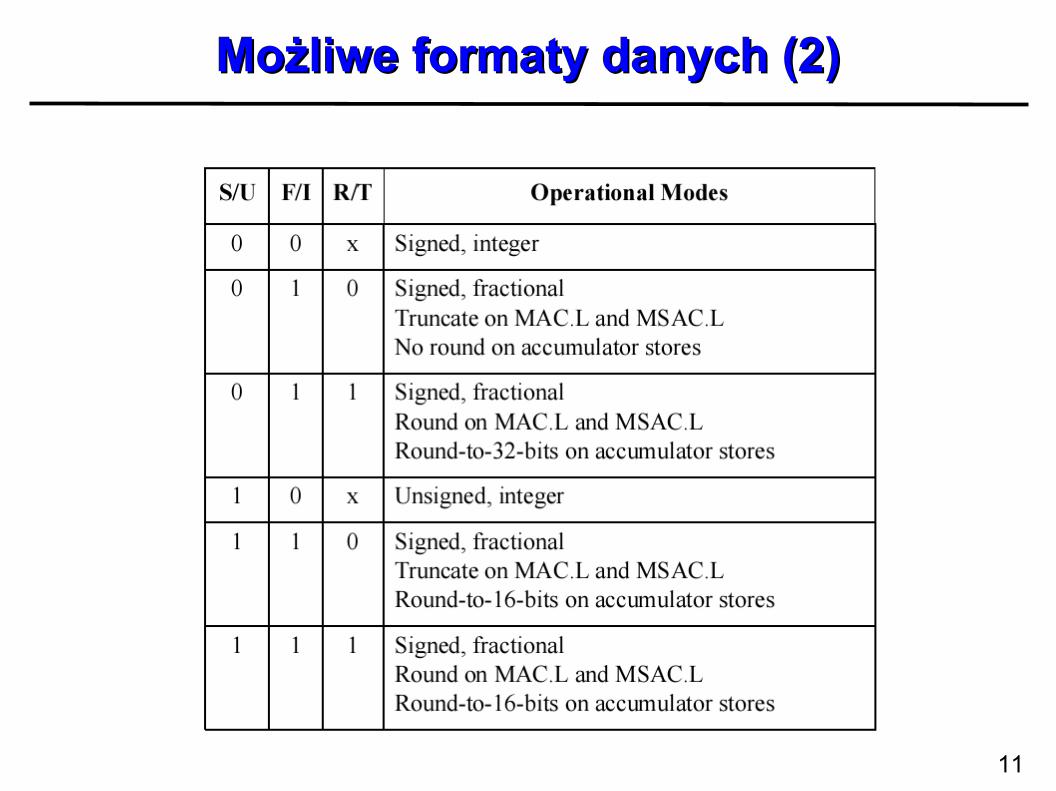
S/U – Operacje ze znakiem lub bez,F/I – Tryb pracy: całkowity (F/I=0), ułamkowy (F/I=1) -1...1-2-15 lub 1...1-2-31
R/T – Zaokrąglanie (R/T=1) / Obcinanie (R/T=0) (podczas kopiowania zawartości 48-bitowego akumulatora do rejestru danych),
N – ustawiana, gdy rezultat operacji jest ujemny (MULS, MULU – nie ustawiają flagi N)Z – ustawiana, gdy rezultat operacji zerowy (MULS, MULU – nie ustawiają flagi Z) V – ustawiana, gdy nastąpi przepełnienie podczas wykonywania operacji MAC, MSAC
(64 bit),EV – ustawiana, gdy nastąpi przepełnienie (32/40 bit) podczas wykonywania operacji
MAC, MSAC.
9
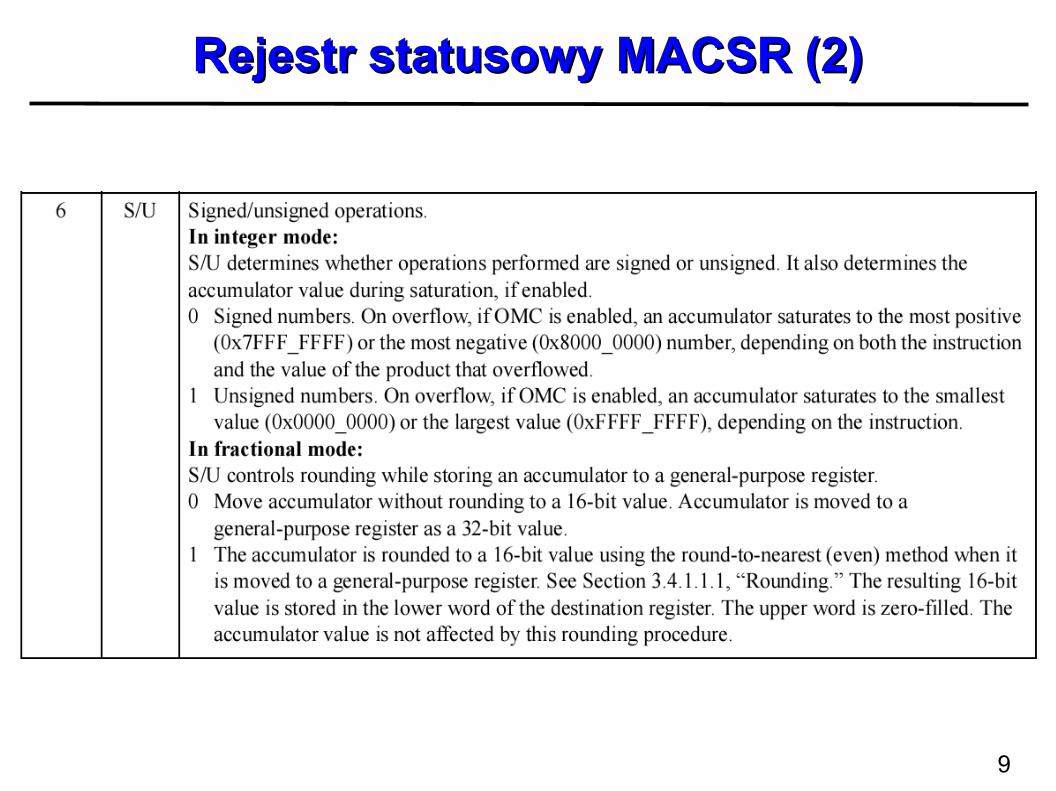
Rejestr statusowy MACSR (2)Rejestr statusowy MACSR (2)
10
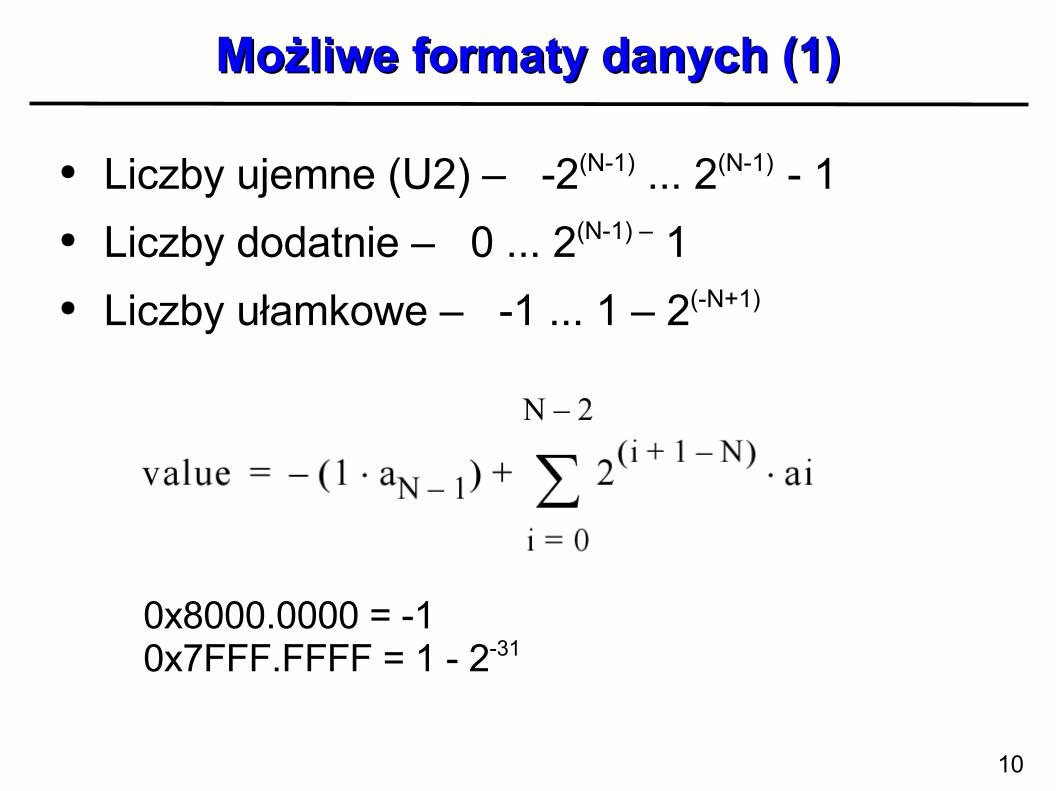
Możliwe formaty danych (1)Możliwe formaty danych (1)
● Liczby ujemne (U2) – -2(N-1) ... 2(N-1) - 1● Liczby dodatnie – 0 ... 2(N-1) – 1● Liczby ułamkowe – -1 ... 1 – 2(-N+1)
0x8000.0000 = -10x7FFF.FFFF = 1 - 2-31
11
Możliwe formaty danych (2)Możliwe formaty danych (2)
12
Mnożenie liczb całkowitychMnożenie liczb całkowitych

13
Mnożenie liczb ułamkowychMnożenie liczb ułamkowych

14
Zapis i odtwarzanie Zapis i odtwarzanie stanu jednostki EMACstanu jednostki EMAC
EMAC_state_save:move.l %MACSR, %D7clr.l %D0move.l %D0, %MACSR | wyłącz zaokr.move.l %ACC0, %D0move.l %ACC1, %D1move.l %ACC2, %D2move.l %ACC3, %D3move.l %ACCEXT01, %D4move.l %ACCEXT23, %D5move.l %MASK, %D6movem.l #0x00FF, (%A7)
EMAC_state_restore:movem.l (%A7), #0x00FFmove.l #0, %MACSR | wyłącz zaokr.move.l %D0, %ACC0move.l %D1, %ACC1move.l %D2, %ACC2move.l %D3, %ACC3move.l %D4, %ACCEXT01move.l %D5, %ACCEXT23move.l %D6, %MASKmove.l %D7, %MACSR

15
Rejestr maski (1)Rejestr maski (1)
MASK
031 16 15
0xFFFF
MOVE.L %D0, %MASKMOVE.L #10, %MASK
16
Rejestr maski (2)Rejestr maski (2)
0x0..00
0x0..BF0x0..FF
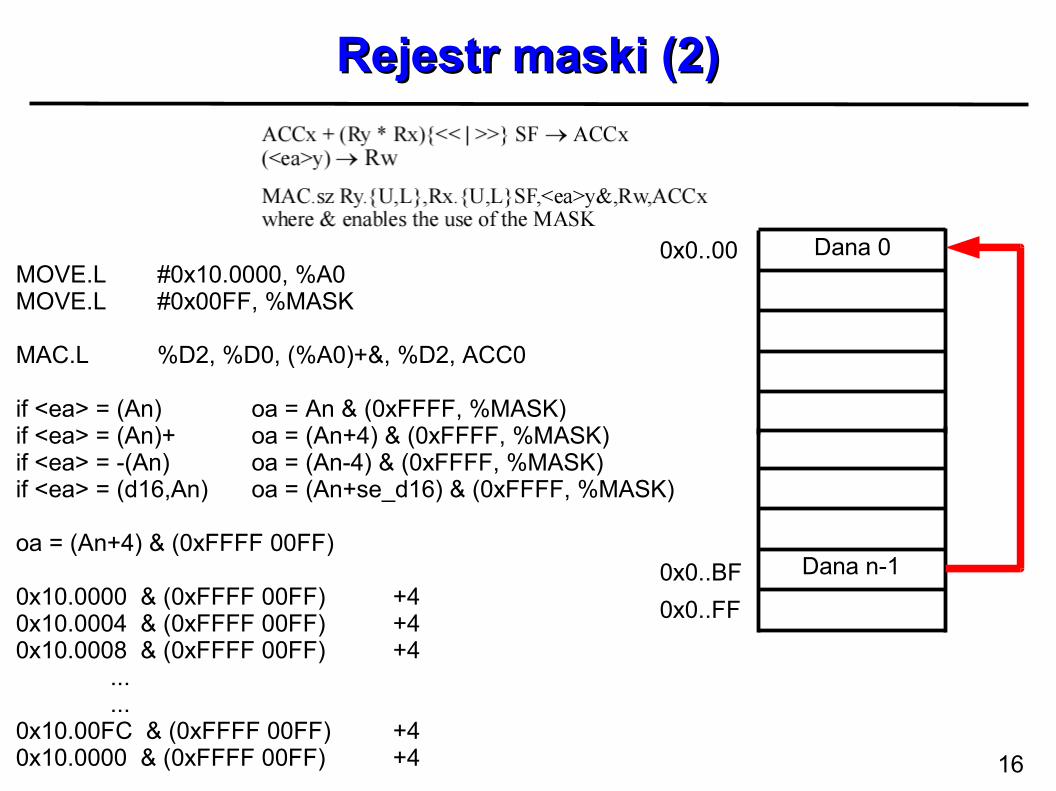
MOVE.L #0x10.0000, %A0MOVE.L #0x00FF, %MASK
MAC.L %D2, %D0, (%A0)+&, %D2, ACC0
if <ea> = (An) oa = An & (0xFFFF, %MASK) if <ea> = (An)+ oa = (An+4) & (0xFFFF, %MASK) if <ea> = -(An) oa = (An-4) & (0xFFFF, %MASK) if <ea> = (d16,An) oa = (An+se_d16) & (0xFFFF, %MASK)
oa = (An+4) & (0xFFFF 00FF)
0x10.0000 & (0xFFFF 00FF) +40x10.0004 & (0xFFFF 00FF) +40x10.0008 & (0xFFFF 00FF) +4
...
...0x10.00FC & (0xFFFF 00FF) +40x10.0000 & (0xFFFF 00FF) +4
Dana 0
Dana n-1

17
Lista instrukcji jednostki EMACLista instrukcji jednostki EMAC
18
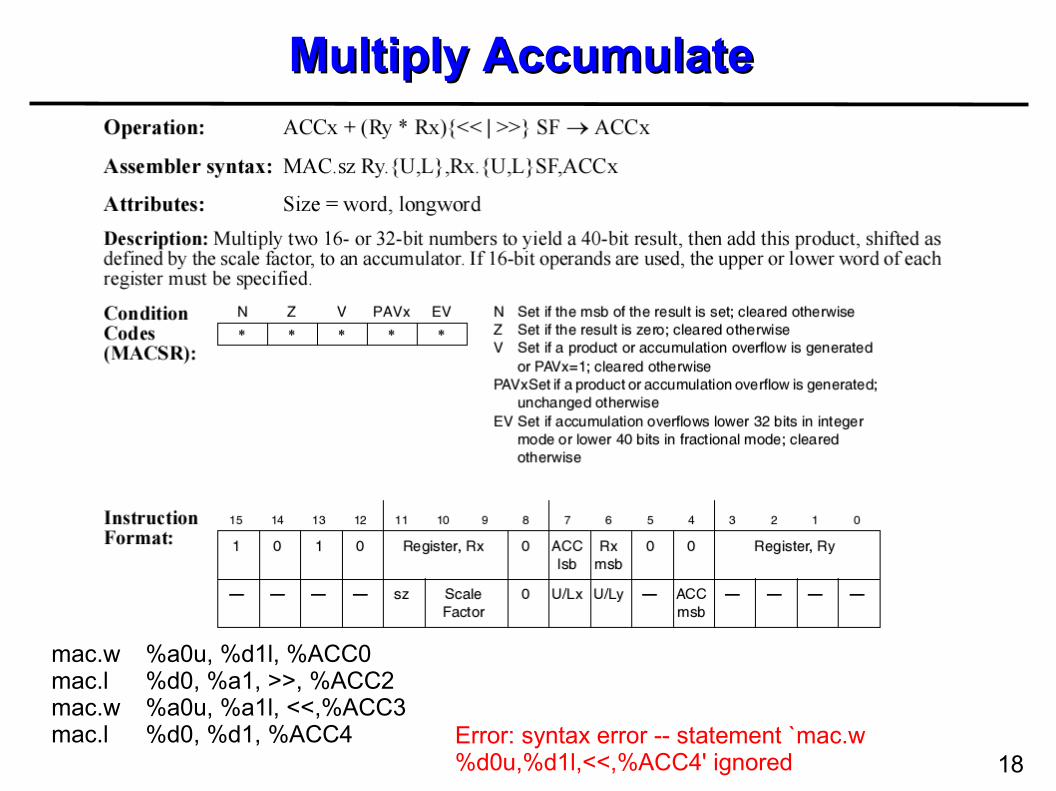
Multiply Accumulate Multiply Accumulate
mac.w %a0u, %d1l, %ACC0mac.l %d0, %a1, >>, %ACC2mac.w %a0u, %a1l, <<,%ACC3mac.l %d0, %d1, %ACC4 Error: syntax error -- statement `mac.w
%d0u,%d1l,<<,%ACC4' ignored
19
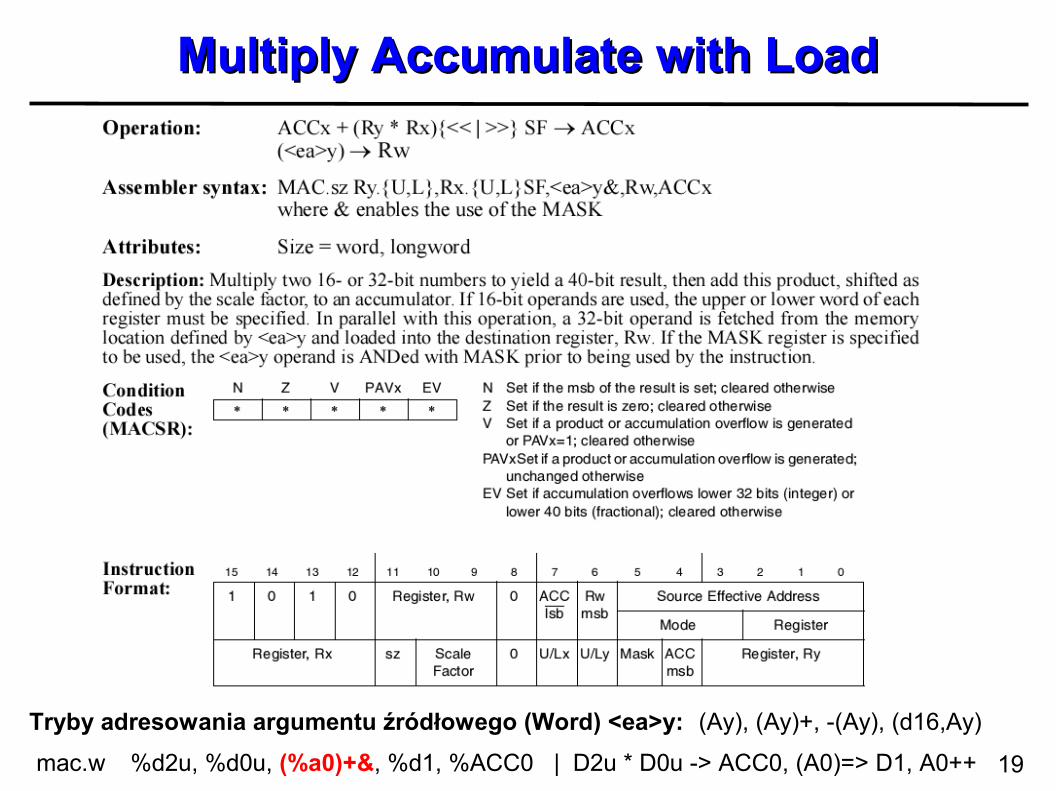
Multiply Accumulate with LoadMultiply Accumulate with Load
Tryby adresowania argumentu źródłowego (Word) <ea>y: (Ay), (Ay)+, -(Ay), (d16,Ay)
mac.w %d2u, %d0u, (%a0)+&, %d1, %ACC0 | D2u * D0u -> ACC0, (A0)=> D1, A0++
20
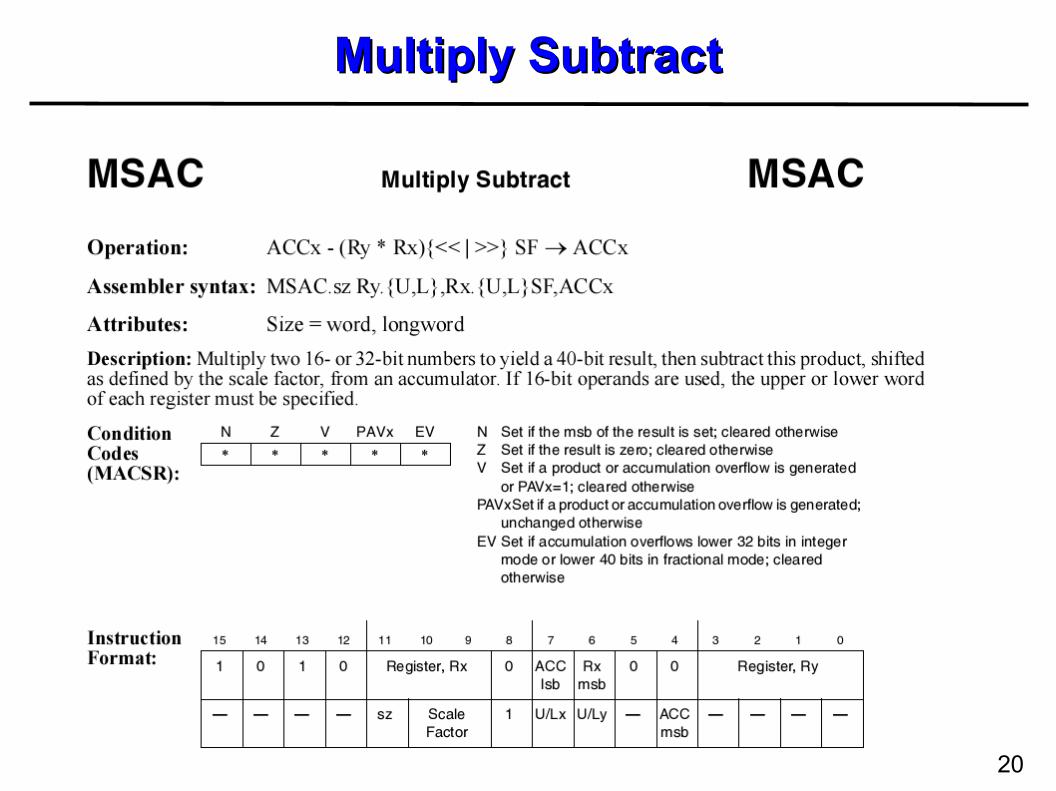
Multiply SubtractMultiply Subtract

21
Przykłady użycia MAC/MSACPrzykłady użycia MAC/MSACSample 0Sample 1
Sample n-1
Coefficient 0Coefficient 1
Coefficient n-1
Sample 0Sample 1
Sample n-1
Coefficient 0
Coefficient n-1Coefficient n-2
Sample n-2
A5
A6
A0movem.l (%a0), %d0-%d3
mac.w %d0u, %d0l, %ACC0mac.w %d1u, %d1l, %ACC0
movem.l (%a5), %d0-%d3movem.l (%a6), %a0-%a3
mac.w %d0l, %a0l, >>, %ACC2msac.w %d0u, %a0u, <<,%ACC3
mac.l %d0, %a1, %ACC1msac.l %d0, %a1, %ACC2
Coefficient 1
31 16 15 0
31 16 15 0
zwykłe 1 clk
zwykłe 3 clk
22
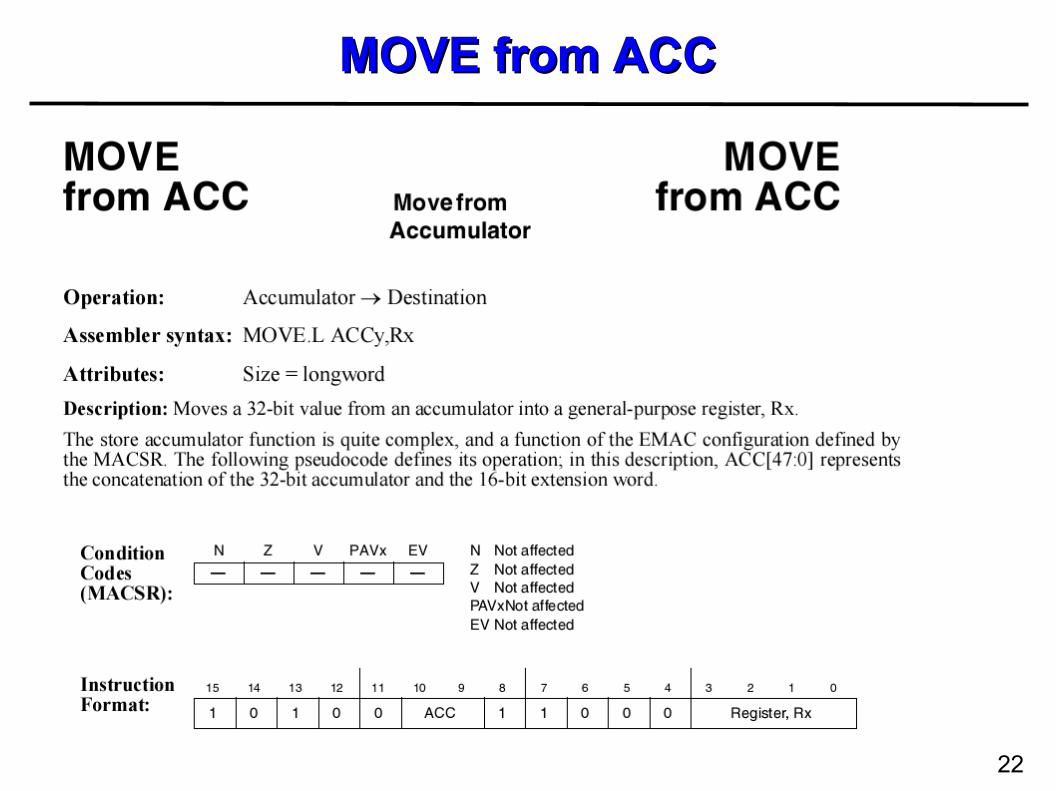
MOVE from ACCMOVE from ACC
23
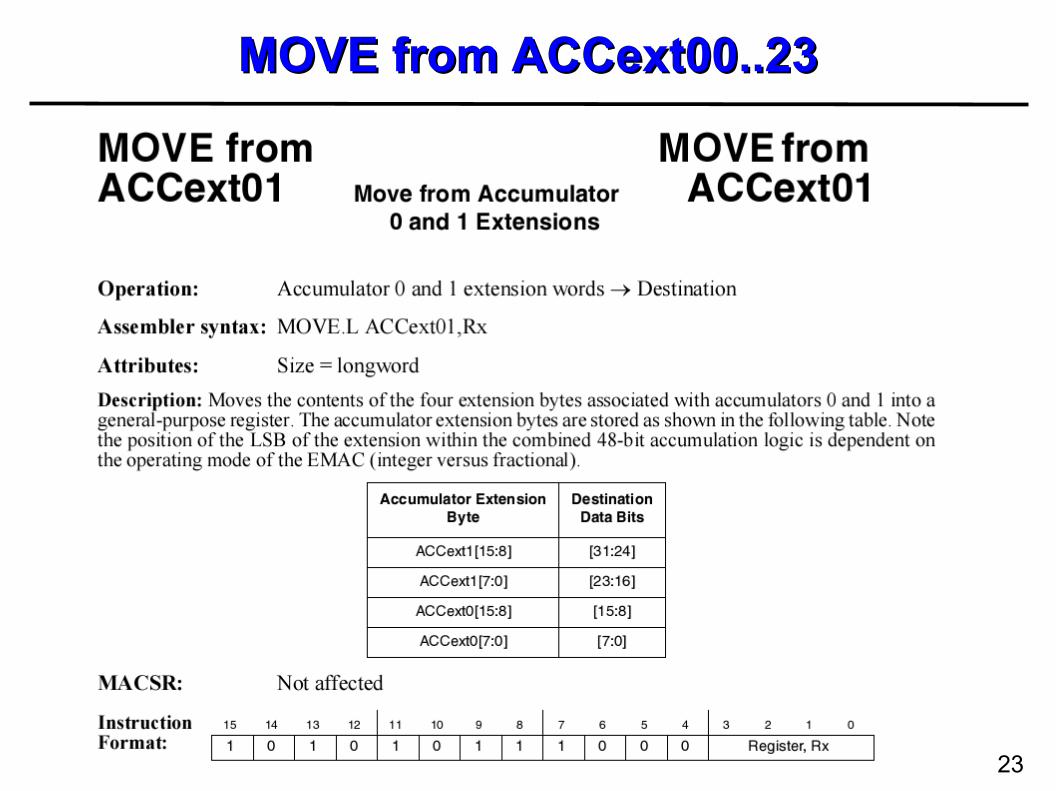
MOVE from ACCext00..23MOVE from ACCext00..23
24
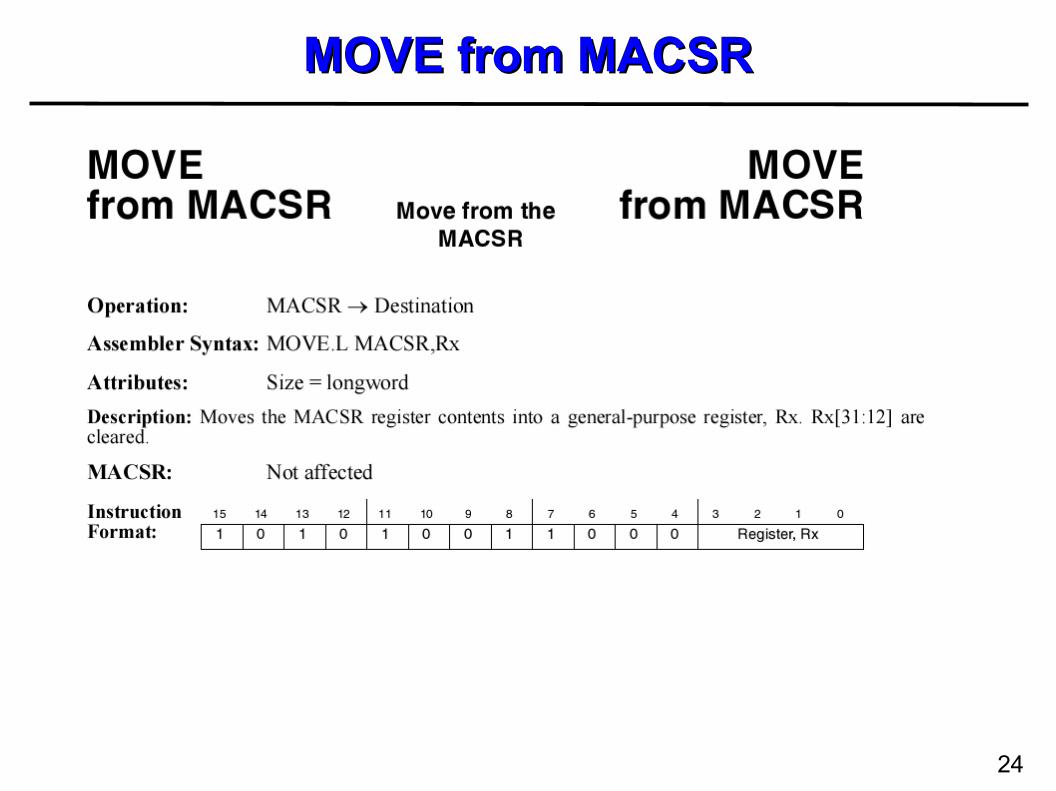
MOVE from MACSRMOVE from MACSR

25
MOVE from MASKMOVE from MASK

26
MOVE to ACCMOVE to ACC
27
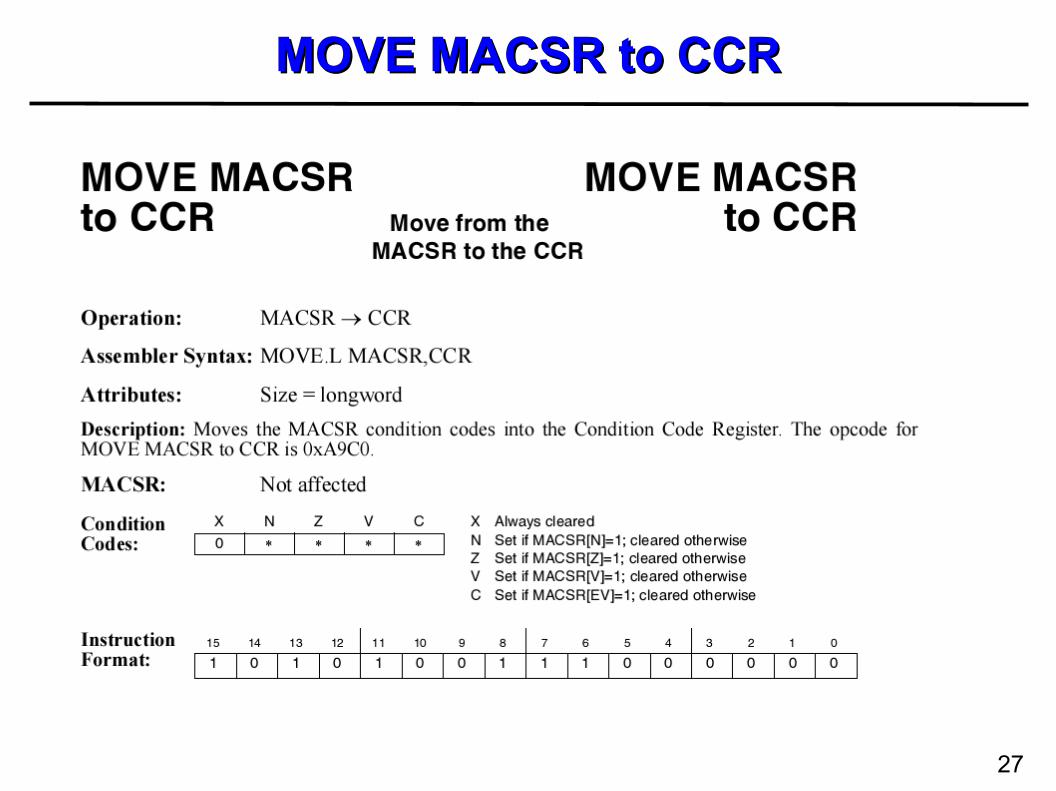
MOVE MACSR to CCRMOVE MACSR to CCR
28
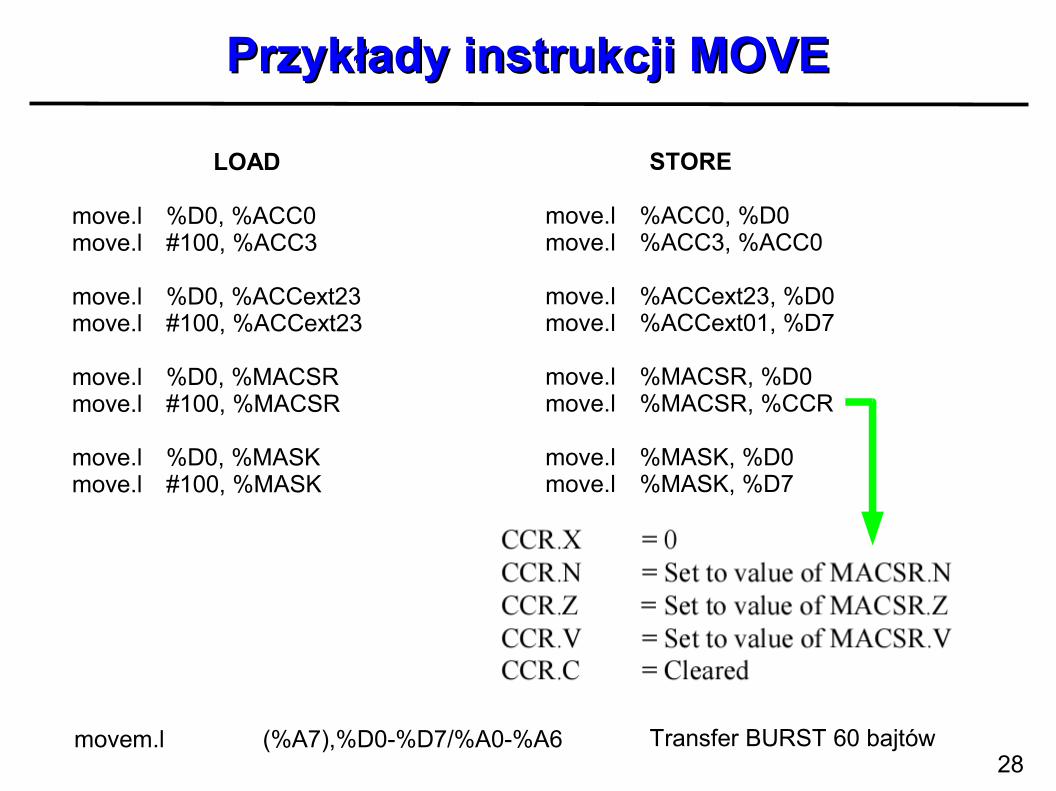
Przykłady instrukcji MOVEPrzykłady instrukcji MOVE
LOAD
move.l %D0, %ACC0move.l #100, %ACC3
move.l %D0, %ACCext23move.l #100, %ACCext23
move.l %D0, %MACSRmove.l #100, %MACSR
move.l %D0, %MASKmove.l #100, %MASK
STORE
move.l %ACC0, %D0move.l %ACC3, %ACC0
move.l %ACCext23, %D0 move.l %ACCext01, %D7
move.l %MACSR, %D0move.l %MACSR, %CCR
move.l %MASK, %D0move.l %MASK, %D7
movem.l (%A7),%D0-%D7/%A0-%A6 Transfer BURST 60 bajtów
29
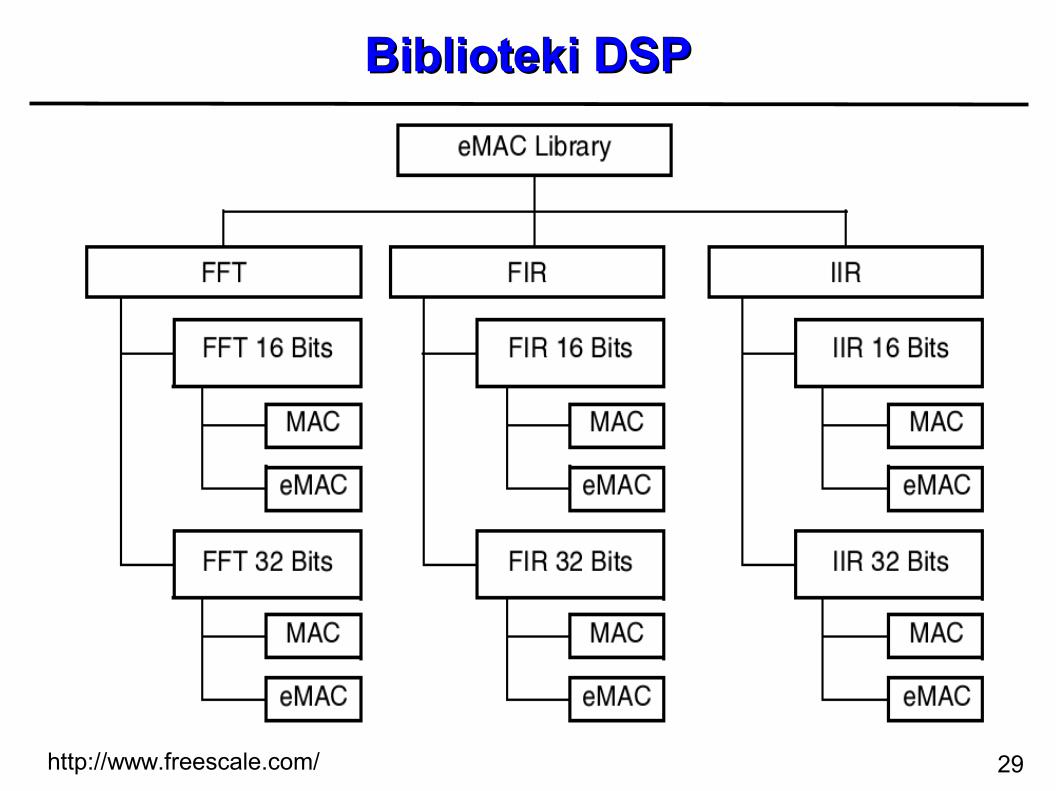
Biblioteki DSPBiblioteki DSP
http://www.freescale.com/
30
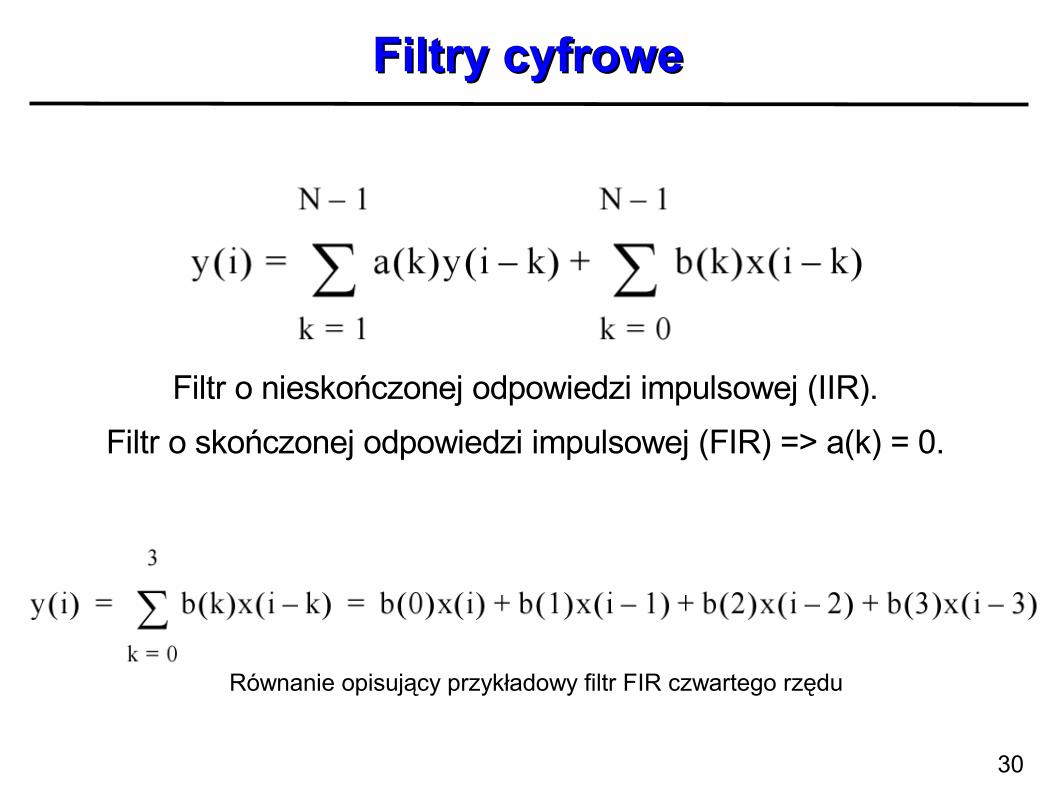
Filtry cyfroweFiltry cyfrowe
Filtr o nieskończonej odpowiedzi impulsowej (IIR).Filtr o skończonej odpowiedzi impulsowej (FIR) => a(k) = 0.
Równanie opisujący przykładowy filtr FIR czwartego rzędu

31
DTMF (DTMF (dual-tone multi-frequencydual-tone multi-frequency) dekoder) dekoder
32
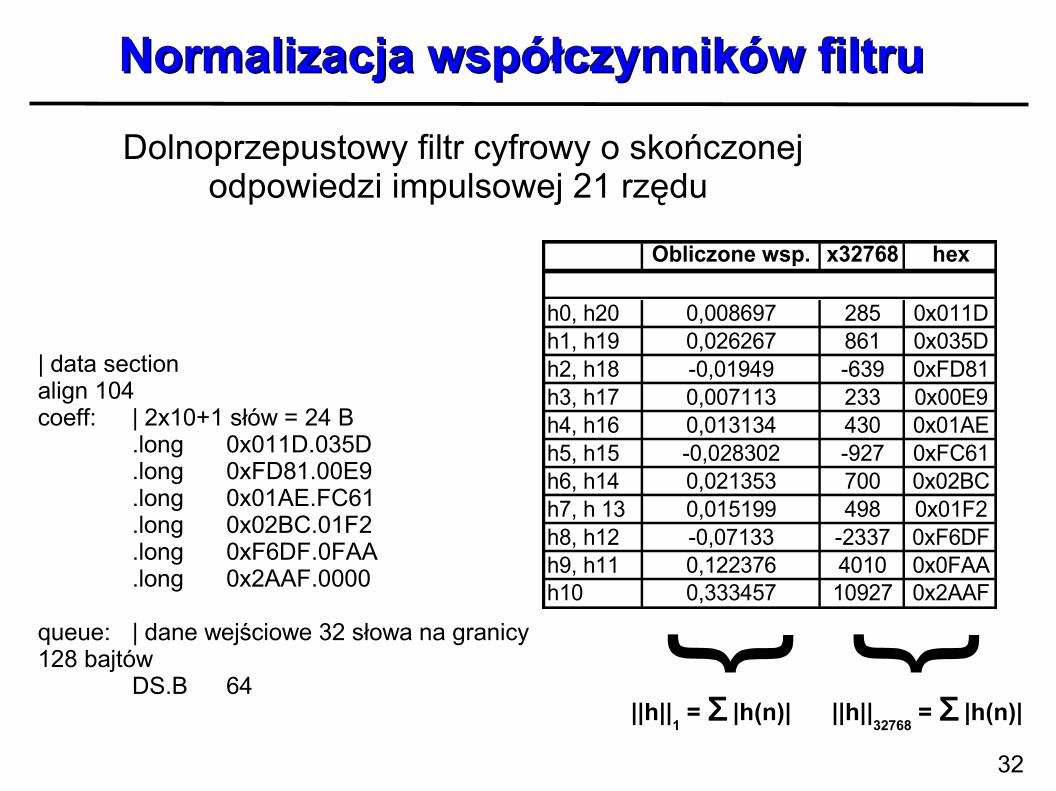
Normalizacja współczynników filtru Normalizacja współczynników filtru
| data sectionalign 104coeff: | 2x10+1 słów = 24 B
.long 0x011D.035D
.long 0xFD81.00E9
.long 0x01AE.FC61
.long 0x02BC.01F2
.long 0xF6DF.0FAA
.long 0x2AAF.0000
queue: | dane wejściowe 32 słowa na granicy 128 bajtów
DS.B 64
Obliczone wsp. x32768 hex
h0, h20 0,008697 285 0x011Dh1, h19 0,026267 861 0x035Dh2, h18 -0,01949 -639 0xFD81h3, h17 0,007113 233 0x00E9h4, h16 0,013134 430 0x01AEh5, h15 -0,028302 -927 0xFC61h6, h14 0,021353 700 0x02BCh7, h 13 0,015199 498 0x01F2h8, h12 -0,07133 -2337 0xF6DFh9, h11 0,122376 4010 0x0FAAh10 0,333457 10927 0x2AAF
||h||1 = Σ |h(n)| ||h||
32768 = Σ |h(n)|
} }Dolnoprzepustowy filtr cyfrowy o skończonej
odpowiedzi impulsowej 21 rzędu
33
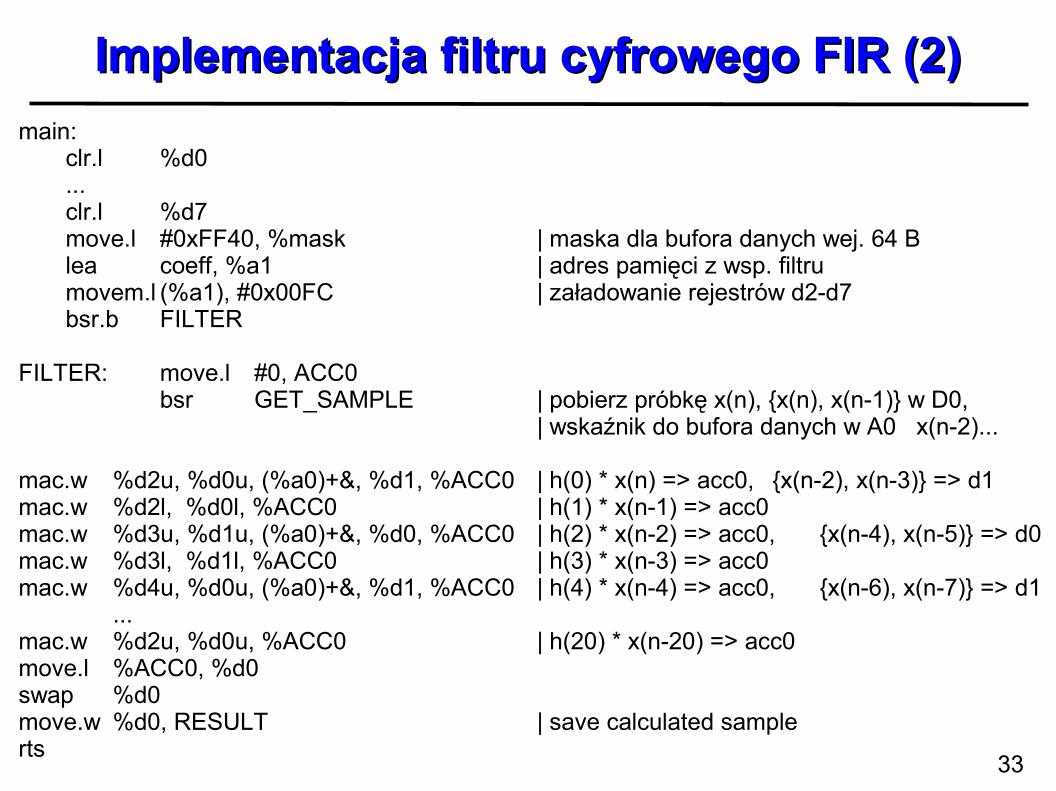
Implementacja filtru cyfrowego FIR (2)Implementacja filtru cyfrowego FIR (2)main:
clr.l %d0...clr.l %d7move.l #0xFF40, %mask | maska dla bufora danych wej. 64 Blea coeff, %a1 | adres pamięci z wsp. filtrumovem.l (%a1), #0x00FC | załadowanie rejestrów d2-d7bsr.b FILTER
FILTER: move.l #0, ACC0bsr GET_SAMPLE | pobierz próbkę x(n), {x(n), x(n-1)} w D0,
| wskaźnik do bufora danych w A0 x(n-2)...
mac.w %d2u, %d0u, (%a0)+&, %d1, %ACC0 | h(0) * x(n) => acc0, {x(n-2), x(n-3)} => d1mac.w %d2l, %d0l, %ACC0 | h(1) * x(n-1) => acc0mac.w %d3u, %d1u, (%a0)+&, %d0, %ACC0 | h(2) * x(n-2) => acc0, {x(n-4), x(n-5)} => d0mac.w %d3l, %d1l, %ACC0 | h(3) * x(n-3) => acc0mac.w %d4u, %d0u, (%a0)+&, %d1, %ACC0 | h(4) * x(n-4) => acc0, {x(n-6), x(n-7)} => d1
...mac.w %d2u, %d0u, %ACC0 | h(20) * x(n-20) => acc0move.l %ACC0, %d0swap %d0move.w %d0, RESULT | save calculated samplerts
34
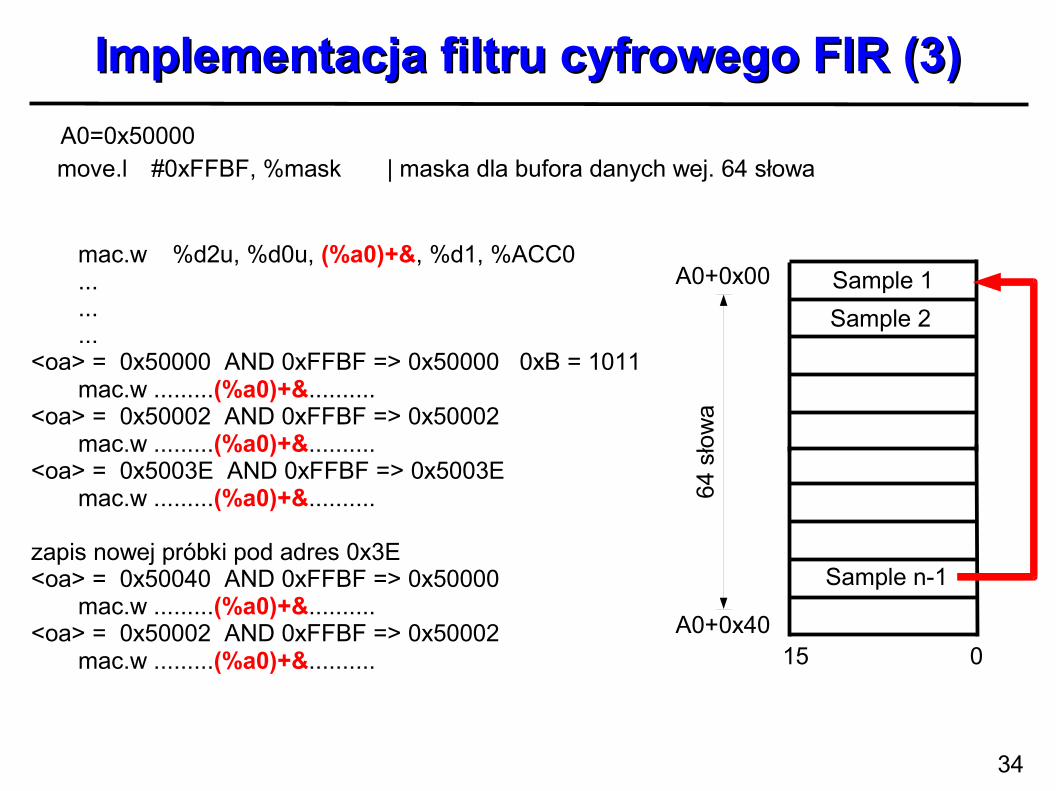
Implementacja filtru cyfrowego FIR (3)Implementacja filtru cyfrowego FIR (3)
A0+0x00
A0+0x40
A0=0x50000
15 0
Sample 1Sample 2
Sample n-1
mac.w %d2u, %d0u, (%a0)+&, %d1, %ACC0.........
<oa> = 0x50000 AND 0xFFBF => 0x50000 0xB = 1011mac.w .........(%a0)+&..........
<oa> = 0x50002 AND 0xFFBF => 0x50002mac.w .........(%a0)+&..........
<oa> = 0x5003E AND 0xFFBF => 0x5003Emac.w .........(%a0)+&..........
zapis nowej próbki pod adres 0x3E <oa> = 0x50040 AND 0xFFBF => 0x50000
mac.w .........(%a0)+&..........<oa> = 0x50002 AND 0xFFBF => 0x50002
mac.w .........(%a0)+&..........
move.l #0xFFBF, %mask | maska dla bufora danych wej. 64 słowa
64 s
łow
a